Cursul 3
9
CURSUL 3. APROXIMAREA FUNCłIILOR PRIN AJUSTARE Ajustarea datelor prin Metoda Celor Mai Mici Pătrate Fie n+1 puncte x 0 , x 1 , .., x n în care se cunosc valorile unei funcŃii f(x). Metoda celor mai mici pătrate se foloseşte la prelucrarea matematică a datelor x 0 , x 1 , .., x n în următoarele cazuri: când n este foarte mare, sau când valorile funcŃiei în punctele considerate nu sunt exacte, fiind obŃinute experimental. Prin această metodă funcŃia f(x) se aproximează cu , ) ( * ) ( 0 ∑ = = m i i i m x c x F ϕ cu m<n unde ) ( x i ϕ sunt funcŃii liniar independente. Având date punctele x 0 , x 1 , .., x n din intervalul [a,b] şi f i =f(x i ) cu i=0..n se cere determinarea lui F m (x) astfel încăt diferenŃa ∑ = − n i i m i x F x f 0 2 )] ( ) ( [ sau ∑ = − n i i m i i x F x f x p 0 2 )] ( ) ( )[ ( cu functia pondere p(x)>0 să fie minimă. Înlocuim F m (x) cu o funcŃie de constantele c 0 , .., c m . Se pune problema determinării acestor constante c j , j=0..m, astfel încât ∑ ∑ = = − = Φ n i m j i j j i m x c f c c 0 0 2 0 )] ( [ ) ,.., ( ϕ să fie minimă. Determinarea constantelor se face rezolvând sistemul m i c i .. 0 , 0 = = ∂ Φ ∂ adică a sistemului
-
Upload
motoc-mircea-razvan -
Category
Documents
-
view
219 -
download
3
description
SEMINAR 3
Transcript of Cursul 3
-
CURSUL 3. APROXIMAREA FUNCIILOR PRIN
AJUSTARE
Ajustarea datelor prin Metoda Celor Mai Mici Ptrate
Fie n+1 puncte x0, x1, .., xn n care se cunosc valorile unei funcii f(x). Metoda
celor mai mici ptrate se folosete la prelucrarea matematic a datelor x0, x1, .., xn
n urmtoarele cazuri: cnd n este foarte mare, sau cnd valorile funciei n
punctele considerate nu sunt exacte, fiind obinute experimental.
Prin aceast metod funcia f(x) se aproximeaz cu
,)(*)(
0====
====m
i
iim xcxF cu m0
s fie minim. nlocuim Fm(x) cu o funcie de constantele c0, .., cm. Se pune
problema determinrii acestor constante cj, j=0..m, astfel nct
==== ====
====n
i
m
j
ijjim xcfcc
0 0
20 )]([),..,(
s fie minim. Determinarea constantelor se face rezolvnd sistemul
mici
..0,0 ========
adic a sistemului
-
0)(])([ 00 0
==== ==== ====
i
n
i
m
j
ijji xxcf
0)(])([
0 0
==== ==== ====
im
n
i
m
j
ijji xxcf
Sistemul de mai sus se mai poate scrie i sub forma urmtoare:
==== ========
====n
i
n
i
ii
m
j
iijj xfxxc
0 00
00 )()()(
==== ========
====n
i
n
i
imi
m
j
imijj xfxxc
0 00
)()()(
De obicei n practic se consider mixx ii ..0,)( ======== , caz n care avem
Fm(x)=c0+c1x++cmxm,
iar sistemul de rezolvat este:
============
====++++++++++++++++n
i
i
n
i
mim
n
i
i fxcxcnc
00010 ..)1(
..
============
++++
====
====++++++++++++n
i
mii
n
i
mim
n
i
mi
n
i
mi xfxcxcxc
00
2
0
11
00 ..
Exemplu:
S considerm tabelul:
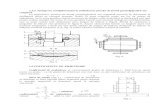
X 1 2 3 4 5 6 7
Y 2 2,5 3,5 6 6,5 8 9
Se vede c datele se aeaz aproximativ de-a lungul unei drepte y=ax+b. Dreapta,
dat de metoda celor mai mici ptrate, care ajusteaz mulimea dat de puncte are
coeficienii a i b dai de condiia ca expresia ( )E a b y ax bi ii
( , ) = 2 s fie
minim.
-
Aceasta implic:
E a b
a
E a b
b
( , )
( , )
=
=
0
0
(1)
Se obine sistemul:
S a S b S
S a pb S
x x xy
x y
2 1
1 1
+ =
+ =
(2)
unde :
S xx ii
22= S xx i
i1 = S x yxy i i
i
= S yy i1 = (3)
iar p este numrul de date. Avem mai jos graficul acestei drepte.
y = 1.25x + 0.3571
0
1
2
3
4
5
6
7
8
9
10
1 2 3 4 5 6 7
Mai general putem considera ajustari ale lui f prin expresii de forma
f(x)a0+a1x+a2x2+....+ahx
h. Coeficienii ai, conform metodei celor mai mici
ptrate sunt dai de condiia ca expresia E a a a y a a xh k hh
k p
( , , ... ) ( ... )..
0 1 02
0
= = s fie
minim, deci:
E
ai h
i
= =0 0 1, , ,... (4)
-
Rezolvarea sistemului (4) este dificila n multe situatii, sistemul fiind n general
neliniar si uneori singular. In cazul cnd sistemul este liniar rezolvarea lui este
relativ simpla.
Algoritmul Levenberg-Marquardt
Chiar daca sistemul (4) este singular functia E a a a y a a xh k hh
k p
( , , ... ) ( ... )..
0 1 02
0
= =
are un minim si programele standard de matematica precum scilab sau matlab l
determina. Sistemul (4) se mai poate scrie:
h,...,kpentru,NaMk
h
lll,k
211
===
unde + ==i
i
k
iki
lk
il,kyxNsixM 12 .
Sunt situatii cand modelul ales este neadecvat; Un program care sa determine o
formula potrivita pentru ajustarea unor date experimentale ar trebui sa aiba
memorate un numar mare de modele de functii model depinznd de unul sau mai
multi parametri si o metoda de a determina minimul expresiei
E a a a y a a xh k hh
k p
( , ,... ) ( ... )..
0 1 02
0
= = pentru fiecare model.
Modelul pentru care =
=n
iini)y)a,...,a,x(f(
nR
1
2
1
1 are cea mai mica valoare este
n principiu modelul cel mai bun. Divizarea cu n este facuta pentru a anula efectul
numarului de puncte asupra lui R.
Pentru functii f : Rm R depinznd de ( )m
x,...,x,xx 21=r
tehnica ajustarii este
aceeasi, doar ca functiile model depind de mRxr
, deci sunt de forma
)a,...,a,x(fp1
r. Avem
( )211 =i
ipipy)a,...,ax(f)a,...,a(E
r (5)
unde mm,i,ii
R)a,...,x(x = 1r
Pentru minimizarea lui )a,...a,a(Ep21 exista un algoritm numit "Levenberg-
Marquardt" care este implementat n mai multe programe ca, de exemplu, scilab
sau matlab.
-
Minimalizarea expresiei (5) in scilab
Ca date de intrare avem un tabel cu date experimentale n..iii
)y,x( 1=r
si o functie
model )a,...,a,x(fp1
r. Se cere determinarea parametrilor
pa,...,a1 astfel ca (5) sa
fie minima. Procedura scilab pentru determinarea parametrilor este lsqrsolve care are forma
[a,v,[info]]=lsqrsolve(a0,e,n,[stop],[diag])
unde:
a - vectorul cu componentele cautate p
a,...,a1 .
v - vectorul cu diferentele ipi
y)a,...,ax(f 1r
pentru valoarea lui a gasita de program
info - este numar a carui valoare depinde de modul de terminare al programului: 0
- parametrii de intrare sunt incorecti; 1-algoritmul estimeaza atol (vezi intrarea
stop), adica eroarea relativa ntre a si solutia exacta, a fost atinsa; 2 - a fost atins
numarul maxim maxeval (vezi intrarea stop) de evaluari pentru functia e; 3 - atol
este o valoare prea mica si nu poate fi atinsa; 4 - iteratiile nu progreseaza satisfacator.
a0 - un vector cu valori initiale pentru a
e - o functie de forma e(a, n) unde a este vectorul parametrilor p
a,...,a1 , iar n este
numarul de date ( )ii
y,xr
din tabelul de intrare. Valoarea functiei e este un vector cu
n componente
( )( )
( )
nnya,xf
..................
ya,xf
ya,xf
r
r
r
22
11
stop - este un vector optional cu conduitii de oprire a algoritmului, stop=[etol,
atol, gol, maxeval, epsfcn, factor], cu valorile implicite [1.d-8,1.d-8,1.d-
5,1000,0,100].
Semnificatiile unor parametri sunt:
-
atol - eroarea relativa maxima admisa intre doua valori iterative consecutive ale lui
a (daca se obtine o eroare relativa mai mica, programul se opreste)
maxeval - numarul maxim de apeluri ale functiei e (daca se atinge acest maxim,
programul se opreste)
diag - este un vector de ponderi
Un exemplu de utilizare a acestei rutine este dat mai jos.
a1=1;a2=-1;a3=2;a4=0.5; a0=[10;10;-10;10]; a=a0; //definim o functie model deff(y=F(x),y=a1*x(1)+a2*x(2)+a3*sin(x(3))+a4*x(4)*x(5)); //definim o matrice de date data=rand(500,5); //definim y=F(x) y=zeros(500,1); for i=1:500 x=data(i,1:5); y(i)=F(x); end //stop=[1.d-10, 1.d-12, 1.d-5, 50000, 0, 100]; //ne pregatim de optimizare //functia de optimizat function dif=e(a,n) dif=a(1)*data(:,1)+a(2)*data(:,2)+a(3)*sin(data(:,3))... +a(4)*data(:,4).*data(:,5)-y; endfunction //este apelataa rutina de optimizare [a,v]=lsqrsolve(a0,e,size(data,1)); a norm(v,.inf.)
Rezultatele ntoarse sunt a = ! 1. ! ! - 1. ! ! 2. ! ! 0.5 !
Valorile exacte ale parametrilor sunt 1, -1, 2, 0.5. Norma vectorului diferentelor
ipiy)a,...,ax(f 1
r este 4.441D-16 .
In programul de mai sus am construit pe y dupa formula
544332211 ,i,i,i,i,ii xxa)xsin(axaxay +++= si am cerut programului sa determine (a1, a2, a3, a4) plecnd de la a0 = (10, 10;-10; 10) n functia model ( ) 5443322114321 xxa)xsin(axaxaa,a,a,a,xf +++=r
. Dupa cum se vede s-a obtinut valoarea exacta pentru a.
-
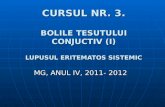
Pentru a apela procedura pentru un numar mai mare de modele putem aranja calculele ca mai jos:
// multitest pentru functii de o variabila //valoarea initiala a parametrilor a a0=[1;1;1;1;1;1;1;1;1;1;1]; //numarul maxim admis de parametri necunoscuti este 10; //functiiile model pentru ajustare nrmodele=3; function val=model(itip,a,x) select itip case 1 then val=a(1)+a(2)*x; case 2 then val=a(1)+a(2)*x+a(3)*x.^2; case 3 then val=a(1)+a(2)*x+a(3)*x.^2+a(3)*x.^3; end endfunction //functia pentru procedura lsqrsolve function dif=e(a,n); dif=model(itip,a,x)-y; endfunction //datele de ajustat x=[1;2;3;4;5;6;7;8;9;1.5;2.5;3.5]; y=[2;5;9;17;24;40;50;65;80;3;5;10]; n=length(x); // testarea tuturor modelelor r=zeros(nrmodele,1); for itip=1:nrmodele [a,v]=lsqrsolve(a0,e,n); //discrepanta intre model si datele reale r(itip)=norm(v,2)/n; end //discrepanta minima [rmin,itip]=min(r); //parametrii la discrepanta minima [a,v]=lsqrsolve(a0,e,n); //tiparim punctele si functia care ajusteaza plot(x,y,ro); xgrid; stanga=min(x);dreapta=max(x); t=(stanga:0.1:dreapta); vt=model(itip,a,t); plot(t,vt,b:);
Se obtine urmatorul grafic, pe care se vad punctele date si graficul functiei care le ajusteaza. Dintre cele trei modele, n acest caz modelul 2 este cel mai bun (r este minim)
-
Exemplu
S se ajusteze printr-un polinom de gradul m=3, urmtoarele date experimentale:
x=[-2, -1, 0, 1, 2] i y=[12, 6, 2, 0, 0]
Rezolvare n Scilab
Program de ajustare printr-un polinom generalizat de grad m. Apelarea se face
pentru datele din exemplu.
function c=CeleMaiMiciPatrate(x,y,m) n=length(x); for k=1:2*m+1 s(k)=0; for i=1:n s(k)=s(k)+x(i)^(k-1); end end for k=1:m+1 b(k)=0; for i=1:n b(k)=b(k)+y(i)*x(i)^(k-1); end end for i=1:m+1 for j=1:m+1 a(i,j)=s(i+j-1); end
-
end c=a^(-1)*b; endfunction CeleMaiMiciPatrate([-2 -1 0 1 2],[12 6 2 0 0],3) ans = ! 2. ! ! - 3. ! ! 1. ! ! 0. !
Exerciii
1. S se scrie expresia polinomului din exemplul de mai sus i s se reprezinte pe
acelai grafic datele experimentale i polinomul.
2. Se consider urmtoarele date experimentale:
xi 0 0.5 1 1.5
yi 1 1.1276 1.5431 2.3534
Se cere:
a) s se calculeze valoarea lui y pentru x=0.25 folosind o parabol pentru ajustarea
datelor experimentale prin metoda celor mai mici ptrate;
b) s se ajusteze aceste date printr-o hiperbol folosind metoda celor mai mici
ptrate, apoi s se reprezinte grafic;
c) s se ajusteze prin y=a*sin(x)+b datele experimentale de mai sus.