curs06_dsis Dinamica structurilor şi inginerie seismică
12
4. Sisteme cu mai multe grade de lib ertate dinamică 69 4. Sisteme cu mai multe grade de libertate dinamică 4.1. Ecuaii de mişcare, formularea problemei, metode de rezolvare O structură poate fi idealizat ă ca şi un ansamblu de elemente (rigle, stâlpi, pere i, etc.) interconectate în noduri (vezi Figura 4.1a). Deplasările nodurilor reprezint ă gradele de libertate. În general, într-o problem ă plană un nod are 3 grade de libertate: două deplas ări de nod şi o rotire. Într-o problemă spaială, un nod are în general 6 grade de libertate: trei deplas ări de nod şi trei rotiri de nod. Un cadru plan cu două deschideri şi două nivele are 18 grade de libertate (vezi Figura 4.1a). inând cont de faptul că deformaiile axiale ale elementelor pot fi neglijate de cele mai multe ori pentru cadre cu un num ăr mic de nivele, numărul gradelor de libertate pentru acest cadru poate fi redus la doar 8 (vezi Figura 4.1b). Forele dinamice (momente şi fore) sunt aplicate în noduri (vezi Figura 4.2), iar momentele p 3 (t) la p 8 (t) sunt egale cu zero în cele mai multe cazuri practice. Figura 4.1. Grade de libertate considerând inclusiv deforma iile axiale: 18 (a), grade de libertate cu deforma iile axiale neglijate: 8 (b), Chopra, 2001. Figura 4.2. Fore dinamice p(t) aplicate în noduri. 4.1.1. For ele elastice Deplasările nodurilor u j sunt în relaie cu forele nodale f Sj (vezi Figura 4.3a). Pentru sistemele liniare for ele nodale pot fi determinate pe baza principiului suprapunerii efectelor şi a coeficien ilor de rigiditate. Blocând toate gradele de libertate şi impunând o deplasare unitar ă pe direcia gradului de libertate j, în blocaje vor apărea reaciuni pe direcia gradelor de libertate considerate. Coeficientul de rigiditate k ij este fora pe direcia gradului de libertate i datorată unei deplas ări unitare de-a lungul gradului de libertate j. Spre exemplu, în Figura 4.3b sunt prezentate forele k i1 (i = 1, 2, …, 8) necesare păstrării echilibrului în cazul
-
Upload
mihaela-ciurel -
Category
Documents
-
view
224 -
download
0
Transcript of curs06_dsis Dinamica structurilor şi inginerie seismică
8/8/2019 curs06_dsis Dinamica structurilor şi inginerie seismică
http://slidepdf.com/reader/full/curs06dsis-dinamica-structurilor-si-inginerie-seismica 1/12
4. Sisteme cu mai multe grade de libertate dinamică
69
4. Sisteme cu mai multe grade de libertate dinamică
4.1. Ecuaii de mişcare, formularea problemei, metode de rezolvare
O structură poate fi idealizată ca şi un ansamblu de elemente (rigle, stâlpi, perei, etc.) interconectate înnoduri (vezi Figura 4.1a). Deplasările nodurilor reprezintă gradele de libertate. În general, într-o problemă plană un nod are 3 grade de libertate: două deplasări de nod şi o rotire. Într-o problemă spaială, un nod are îngeneral 6 grade de libertate: trei deplasări de nod şi trei rotiri de nod.
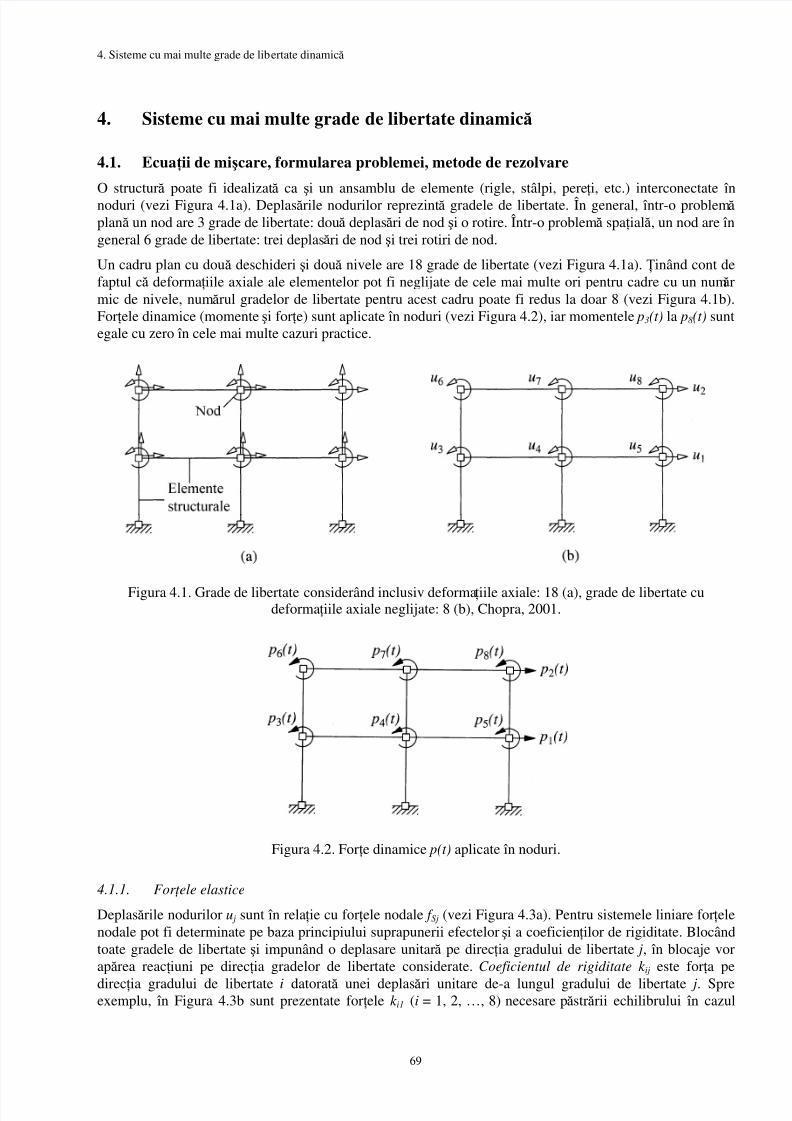
Un cadru plan cu două deschideri şi două nivele are 18 grade de libertate (vezi Figura 4.1a). inând cont defaptul că deformaiile axiale ale elementelor pot fi neglijate de cele mai multe ori pentru cadre cu un numărmic de nivele, numărul gradelor de libertate pentru acest cadru poate fi redus la doar 8 (vezi Figura 4.1b).Forele dinamice (momente şi fore) sunt aplicate în noduri (vezi Figura 4.2), iar momentele p3(t) la p8(t) suntegale cu zero în cele mai multe cazuri practice.
Figura 4.1. Grade de libertate considerând inclusiv deformaiile axiale: 18 (a), grade de libertate cudeformaiile axiale neglijate: 8 (b), Chopra, 2001.
Figura 4.2. Fore dinamice p(t) aplicate în noduri.
4.1.1. For ele elastice
Deplasările nodurilor u j sunt în relaie cu forele nodale f Sj (vezi Figura 4.3a). Pentru sistemele liniare forelenodale pot fi determinate pe baza principiului suprapunerii efectelor şi a coeficienilor de rigiditate. Blocândtoate gradele de libertate şi impunând o deplasare unitară pe direcia gradului de libertate j, în blocaje vorapărea reaciuni pe direcia gradelor de libertate considerate. Coeficientul de rigiditate k ij este fora pe
direcia gradului de libertate i datorată unei deplasări unitare de-a lungul gradului de libertate j. Spreexemplu, în Figura 4.3b sunt prezentate forele k i1 (i = 1, 2, …, 8) necesare păstrării echilibrului în cazul

8/8/2019 curs06_dsis Dinamica structurilor şi inginerie seismică
http://slidepdf.com/reader/full/curs06dsis-dinamica-structurilor-si-inginerie-seismica 2/12
Dinamica Structurilor şi Inginerie Seismică. [Sem. II 2007] http://cemsig.ct.upt.ro/astratan/didactic/dsis/
impunerii unei deplasări unitare u1 = 1. Cu toate că toate forele k ij din Figura 4.3 sunt reprezentate cusemnele lor pozitive, unele dintre acestea vor fi negative pentru a fi compatibile cu deplasările impuse.
Cunoscând coeficienii de rigiditate k ij, forele nodale f Si pe direcia gradului de libertate i, asociate deplasăriiu j, j = 1, 2, …, N se obin folosind principiul suprapunerii efectelor (vezi Figura 4.3a):
1 1 2 2 ... ...Si i i ij j iN N f k u k u k u k u= + + + + + (4.1)
Ecuaiile corespunzătoare i=1, 2, …, N pot fi scrise în formă matriceală:
11 12 1 11 1
21 22 2 22 2
1 2
j N S
j N S
N N Nj NN SN N
k k k k f u
k k k k f u
k k k k f u
=
…
(4.2)
sau, în formă compactă:
[ ] [ ] S f k u= (4.3)
unde [k ] este matricea de rigiditate a structurii, care este o matrice simetrică (k ij = k ji).
(a)
(b)
Figura 4.3. Componenta de rigiditate pentru un cadru plan (a), coeficienii de rigiditate pentru u j = 1 (b),Chopra, 2001.
4.1.2. For ele de amortizare
În mod similar cu matricea de rigiditate poate fi determinată şi matricea de amortizare. Astfel, dacă seblochează toate gradele de libertate şi se impune o viteză unitară pe direcia gradului de libertate j, vor figenerate fore pe direcia gradelor de libertate considerate. Coeficientul de amortizare cij este fora pe direciagradului de libertate i datorată unei viteze unitare de-a lungul gradului de libertate j.
Cunoscând coeficienii de amortizare cij, forele nodale f Di pe direcia gradului de libertate i, asociate vitezei
ju , j = 1, 2, …, N se obin folosind principiul suprapunerii efectelor (vezi Figura 4.4):
1 1 2 2 ... ... Di i i ij j iN N f c u c u c u c u= + + + + + (4.4)
Ecuaiile corespunzătoare i = 1, 2, …, N pot fi scrise în formă matriceală:
11 12 1 11 1
21 22 2 22 2
1 2
j N D
j N D
N N Nj NN DN N
c c c c f u
c c c c f u
c c c c f u
=
…
(4.5)
sau, în formă compactă:[ ] [ ] D f c u= (4.6)

8/8/2019 curs06_dsis Dinamica structurilor şi inginerie seismică
http://slidepdf.com/reader/full/curs06dsis-dinamica-structurilor-si-inginerie-seismica 3/12
4. Sisteme cu mai multe grade de libertate dinamică
71
unde [c] este matricea de amortizare a structurii.
Figura 4.4. Componenta de amortizare pentru un cadru plan (Chopra, 2001).
4.1.3. For ele de iner ie
Dacă se blochează toate gradele de libertate şi se impune o acceleraie unitară pe direcia gradului de libertate j, conform principiului lui D'Alambert vor fi generate fore de inerie pe direcia gradelor de libertateconsiderate. Coeficientul masei mij este fora pe direcia gradului de libertate i datorată unei acceleraiiunitare de-a lungul gradului de libertate j. Spre exemplu, în Figura 4.5b sunt prezentate forele mi1 (i = 1, 2, …, 8) necesare păstrării echilibrului în cazul impunerii unei acceleraii unitare 1 1u = .
Cunoscând coeficienii maselor mij, forele nodale f Ii pe direcia gradului de libertate i, asociate acceleraiei
ju , j = 1, 2, …, N sunt obinute folosind principiul suprapunerii efectelor (vezi Figura 4.5a):
1 1 2 2 ... ... Ii i i ij j iN N
f m u m u m u m u= + + + + + (4.7)
Ecuaiile corespunzătoare i = 1, 2, …, N pot fi scrise în formă matriceală:
11 12 1 11 1
21 22 2 22 2
1 2
j N I
j N I
N N Nj NN IN N
m m m m f u
m m m m f u
m m m m f u
=
…
(4.8)
sau, în formă compactă:
[ ] [ ] I f m u= (4.9)
unde [m] este matricea masei structurii, care este o matrice simetrică (mij = m ji).
(a) (b)
Figura 4.5. Componenta de masă pentru un cadru plan (a), coeficienii de masă pentru 1 1u = (b),
Chopra, 2001.Masa unei structuri este distribuită în întreaga structură (vezi Figura 4.6a). Totuşi, în cele mai multe cazuri,masa poate fi considerată concentrată în nodurile structurii. Procedura constă în concentrarea masei
8/8/2019 curs06_dsis Dinamica structurilor şi inginerie seismică
http://slidepdf.com/reader/full/curs06dsis-dinamica-structurilor-si-inginerie-seismica 4/12
Dinamica Structurilor şi Inginerie Seismică. [Sem. II 2007] http://cemsig.ct.upt.ro/astratan/didactic/dsis/
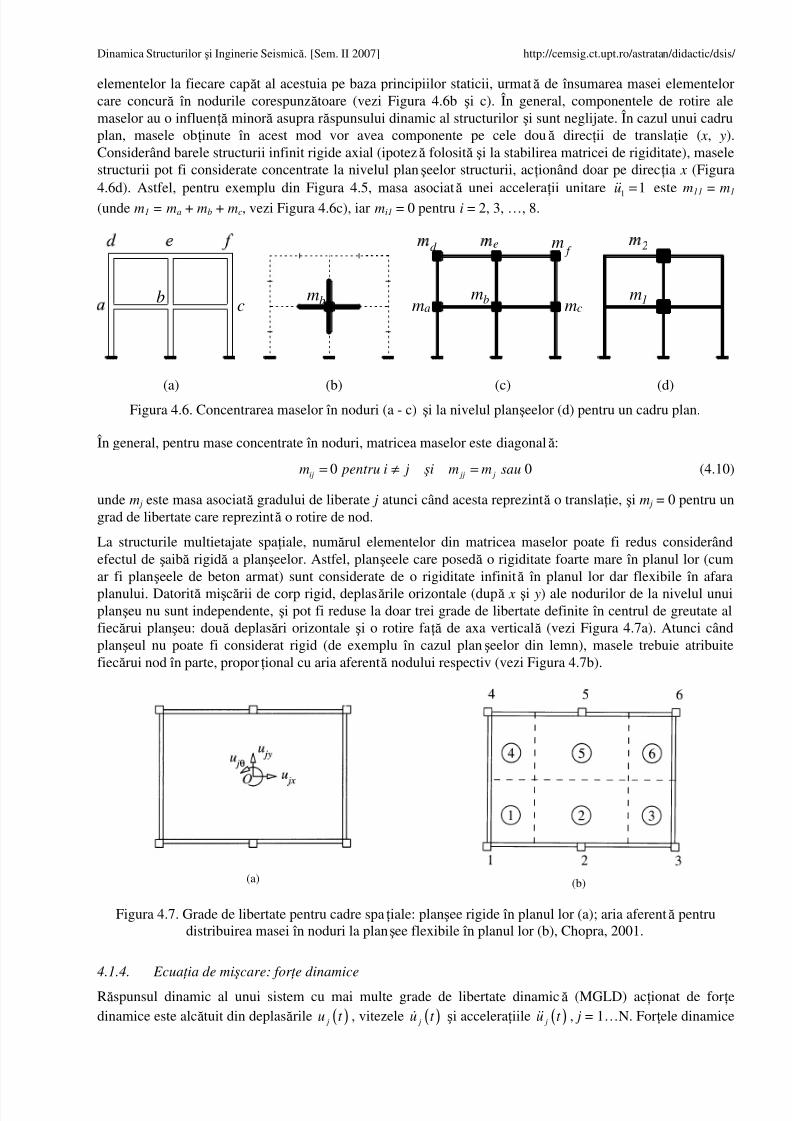
elementelor la fiecare capăt al acestuia pe baza principiilor staticii, urmată de însumarea masei elementelorcare concură în nodurile corespunzătoare (vezi Figura 4.6b şi c). În general, componentele de rotire alemaselor au o influenă minoră asupra răspunsului dinamic al structurilor şi sunt neglijate. În cazul unui cadruplan, masele obinute în acest mod vor avea componente pe cele două direcii de translaie ( x, y).Considerând barele structurii infinit rigide axial (ipoteză folosită şi la stabilirea matricei de rigiditate), maselestructurii pot fi considerate concentrate la nivelul planşeelor structurii, acionând doar pe direcia x (Figura4.6d). Astfel, pentru exemplu din Figura 4.5, masa asociată unei acceleraii unitare
11u = este m
11
= m1
(unde m1 = ma + mb + mc, vezi Figura 4.6c), iar mi1 = 0 pentru i = 2, 3, …, 8.
bc
mb mamb mc
d e m f
m1
2
(a) (b) (c) (d)
Figura 4.6. Concentrarea maselor în noduri (a - c) şi la nivelul planşeelor (d) pentru un cadru plan.
În general, pentru mase concentrate în noduri, matricea maselor este diagonală:
0 0ij jj j
m pentru i j şi m m sau= ≠ = (4.10)
unde m j este masa asociată gradului de liberate j atunci când acesta reprezintă o translaie, şi m j = 0 pentru ungrad de libertate care reprezintă o rotire de nod.
La structurile multietajate spaiale, numărul elementelor din matricea maselor poate fi redus considerândefectul de şaibă rigidă a planşeelor. Astfel, planşeele care posedă o rigiditate foarte mare în planul lor (cumar fi planşeele de beton armat) sunt considerate de o rigiditate infinită în planul lor dar flexibile în afara
planului. Datorită mişcării de corp rigid, deplasările orizontale (după x şi y) ale nodurilor de la nivelul unuiplanşeu nu sunt independente, şi pot fi reduse la doar trei grade de libertate definite în centrul de greutate alfiecărui planşeu: două deplasări orizontale şi o rotire faă de axa verticală (vezi Figura 4.7a). Atunci cândplanşeul nu poate fi considerat rigid (de exemplu în cazul planşeelor din lemn), masele trebuie atribuitefiecărui nod în parte, proporional cu aria aferentă nodului respectiv (vezi Figura 4.7b).
(a) (b)
Figura 4.7. Grade de libertate pentru cadre spaiale: planşee rigide în planul lor (a); aria aferentă pentrudistribuirea masei în noduri la planşee flexibile în planul lor (b), Chopra, 2001.
4.1.4. Ecua ia de mi şcare: for e dinamice
Răspunsul dinamic al unui sistem cu mai multe grade de libertate dinamică (MGLD) acionat de foredinamice este alcătuit din deplasările ( ) j
u t , vitezele ( ) ju t şi acceleraiile ( ) j
u t , j = 1…N. Forele dinamice

8/8/2019 curs06_dsis Dinamica structurilor şi inginerie seismică
http://slidepdf.com/reader/full/curs06dsis-dinamica-structurilor-si-inginerie-seismica 5/12
4. Sisteme cu mai multe grade de libertate dinamică
73
( ) p t pot fi considerate distribuite la componenta de rigiditate ( ) S f t , componenta de amortizare
( ) D f t şi componenta de masă ( ) I
f t (vezi Figura 4.8):
( ) ( ) ( ) ( ) I D S f t f t f t p t + + = (4.11)
Înlocuind ecuaiile (4.3), (4.6) şi (4.9) în ecuaia (4.11) obinem:
[ ] [ ] [ ] ( ) m u c u k u p t + + = (4.12)
ceea ce reprezintă un sistem de N ecuaii difereniale, a cărui rezolvarea duce la determinarea deplasărilor
( ) u t generate de aciunea dinamică ( ) p t . Ecuaia (4.12) reprezintă echivalentul MGLD al ecuaiei (2.6)
determinată pentru un sistem SGLD.
(a)Deplasări
ju
Viteze j
u
Acceleraii j
u
(b)Deplasări
ju
(c)Viteze
ju
(d)Acceleraii
ju
Figura 4.8. Sistemul MGLD complet (a), componenta de rigiditate (b), cea de amortizare (c) şi de masă (d),Chopra, 2001.
4.1.5. Ecua ia de mi şcare: ac iunea seismică
Pentru un număr mare de structuri inginereşti toate gradele de libertate dinamică sunt deplasări în aceeaşidirecie cu mişcarea seismică. Două astfel de structuri, un cadru multietajat şi un turn, sunt prezentate înFigura 4.9. Deplasarea terenului este notată cu ug, deplasarea totală a masei m j cu t
ju , iar deplasarea relativă
între această masă şi teren cu u j. Relaia dintre aceste deplasări este dată de expresia:
( ) ( ) ( )t
j j gu t u t u t = + (4.13)
Toate cele N astfel de ecuaii formulate pentru fiecare masă pot fi combinate în formă vectorială:
( ) ( ) ( ) 1t
gu t u t u t = + (4.14)
unde 1 este un vector unitate.
Ecuaia (4.11) derivată pentru cazul unor fore dinamice este valabilă în continuare, dar în cazul mişcării
terenului forele dinamice ( ) 0 p t = , deoarece nu există fore dinamice aplicate maselor structurii:
( ) ( ) ( ) 0 I D S f t f t f t + + = (4.15)
inând cont de faptul că doar deformaiile relative t
ju produc fore elastice ( ) S
f t şi de amortizare
( ) D f t , iar forele de inerie ( ) I
f t sunt generate de acceleraia totală a maselor, ecuaia (4.15) devine:
[ ] [ ] [ ] 0t
m u c u k u+ + = (4.16)
care, inând cont de relaia (4.13) devine:

8/8/2019 curs06_dsis Dinamica structurilor şi inginerie seismică
http://slidepdf.com/reader/full/curs06dsis-dinamica-structurilor-si-inginerie-seismica 6/12
Dinamica Structurilor şi Inginerie Seismică. [Sem. II 2007] http://cemsig.ct.upt.ro/astratan/didactic/dsis/
[ ] [ ] [ ] [ ] ( )1g
m u c u k u m u t + + = − (4.17)
Relaia (4.17) reprezintă N ecuaii difereniale. Rezolvând acest sistem de ecuaii se pot determina deplasărilerelative u j(t) ale sistemului MGLD sub aciunea acceleraiei terenului ug(t). Matricea de rigiditate [k ] sereferă doar la deplasările orizontale u j şi se poate obine prin condensare statică (Chopra, 2001), pentru aelimina gradele de libertate corespunzătoare deplasărilor verticale şi rotirilor de noduri. Din această cauză,matricea [k ] este cunoscută sub denumirea de matrice de rigiditate laterală. Cu toate acestea, în analizastatică a structurii se va folosi matricea de rigiditate completă a structurii.
Comparaia ecuaiilor (4.12) şi (4.17) indică faptul că ecuaia de mişcare a unui sistem MGLD supus uneimişcări seismice (acceleraia terenului ( )g
u t ) este echivalentă ecuaiei de mişcare a sistemului MGLD
acionat de fore dinamice egale cu ( ) j gm u t − aplicate maselor (vezi Figura 4.10). Astfel, mişcarea terenului
poate fi înlocuită cu fore seismice efective:
( ) [ ] ( )1eff g
p t m u t = − (4.18)
Ecuaia de mişcare (4.17) este valabilă numai pentru cazul în care toate gradele de libertate dinamică alestructurii sunt deplasări orizontale în aceeaşi direcie cu mişcarea seismică. Valabilitatea acestei ecuaii mai
este limitată şi de ipoteza că toate reazemele structurii se deplasează în fază, adică nu există deplasări relative între reazemele structurii. Această ultimă ipoteză este rezonabilă pentru majoritatea structurilor inginereşti.Mişcarea difereniată a reazemelor structurii poate fi necesară pentru structurile cu deschideri foarte mari.
Figura 4.9. Schematizarea a două sisteme MGLD: un cadru multietajat (a) şi un turn (b),Chopra, 2001.
Figura 4.10. Fore seismice efective (Chopra, 2001).
8/8/2019 curs06_dsis Dinamica structurilor şi inginerie seismică
http://slidepdf.com/reader/full/curs06dsis-dinamica-structurilor-si-inginerie-seismica 7/12
4. Sisteme cu mai multe grade de libertate dinamică
75
4.2. Vibraii libere ale sistemelor MGLD
4.2.1. Moduri proprii de vibra ie ale sistemelor MGLD neamortizate
În cazul vibraiilor libere neamortizate ecuaia de mişcare (4.12) pentru sisteme MGLD devine:
[ ] [ ] 0m u k u+ = (4.19)
Ecuaia (4.19) reprezintă un sistem de N ecuaii difereniale omogene, unde N este numărul de GLD.Cunoscând condiiile iniiale:
( ) ( ) 0 0u u u u= = (4.20)
la timpul t = 0 se poate determina soluia u(t) a ecuaiei (4.19).
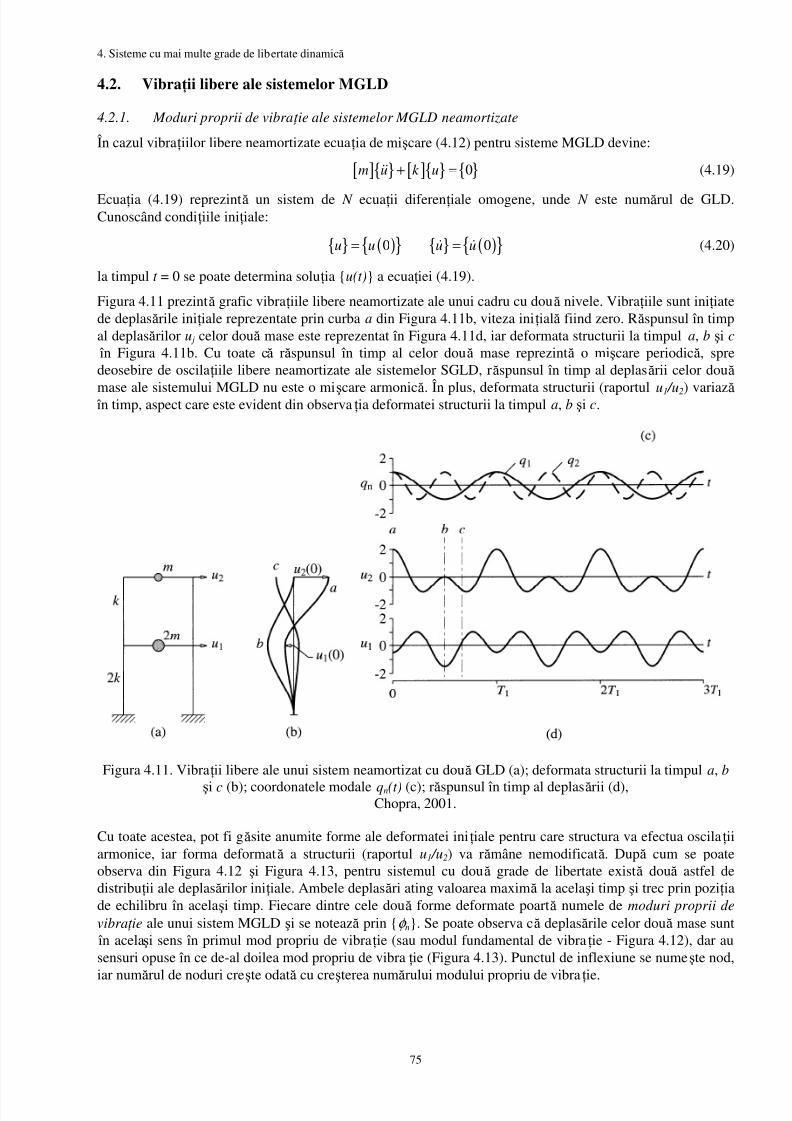
Figura 4.11 prezintă grafic vibraiile libere neamortizate ale unui cadru cu două nivele. Vibraiile sunt iniiatede deplasările iniiale reprezentate prin curba a din Figura 4.11b, viteza iniială fiind zero. Răspunsul în timpal deplasărilor u j celor două mase este reprezentat în Figura 4.11d, iar deformata structurii la timpul a, b şi c
în Figura 4.11b. Cu toate că răspunsul în timp al celor două mase reprezintă o mişcare periodică, spredeosebire de oscilaiile libere neamortizate ale sistemelor SGLD, răspunsul în timp al deplasării celor două
mase ale sistemului MGLD nu este o mişcare armonică. În plus, deformata structurii (raportul u1 /u2) variază în timp, aspect care este evident din observaia deformatei structurii la timpul a, b şi c.
Figura 4.11. Vibraii libere ale unui sistem neamortizat cu două GLD (a); deformata structurii la timpul a, b
şi c (b); coordonatele modale qn(t) (c); răspunsul în timp al deplasării (d),Chopra, 2001.
Cu toate acestea, pot fi găsite anumite forme ale deformatei iniiale pentru care structura va efectua oscilaiiarmonice, iar forma deformată a structurii (raportul u1 /u2) va rămâne nemodificată. După cum se poateobserva din Figura 4.12 şi Figura 4.13, pentru sistemul cu două grade de libertate există două astfel dedistribuii ale deplasărilor iniiale. Ambele deplasări ating valoarea maximă la acelaşi timp şi trec prin poziiade echilibru în acelaşi timp. Fiecare dintre cele două forme deformate poartă numele de moduri proprii de
vibra ie ale unui sistem MGLD şi se notează prin φ n. Se poate observa că deplasările celor două mase sunt în acelaşi sens în primul mod propriu de vibraie (sau modul fundamental de vibraie - Figura 4.12), dar ausensuri opuse în ce de-al doilea mod propriu de vibra ie (Figura 4.13). Punctul de inflexiune se numeşte nod,
iar numărul de noduri creşte odată cu creşterea numărului modului propriu de vibraie.
8/8/2019 curs06_dsis Dinamica structurilor şi inginerie seismică
http://slidepdf.com/reader/full/curs06dsis-dinamica-structurilor-si-inginerie-seismica 8/12
Dinamica Structurilor şi Inginerie Seismică. [Sem. II 2007] http://cemsig.ct.upt.ro/astratan/didactic/dsis/
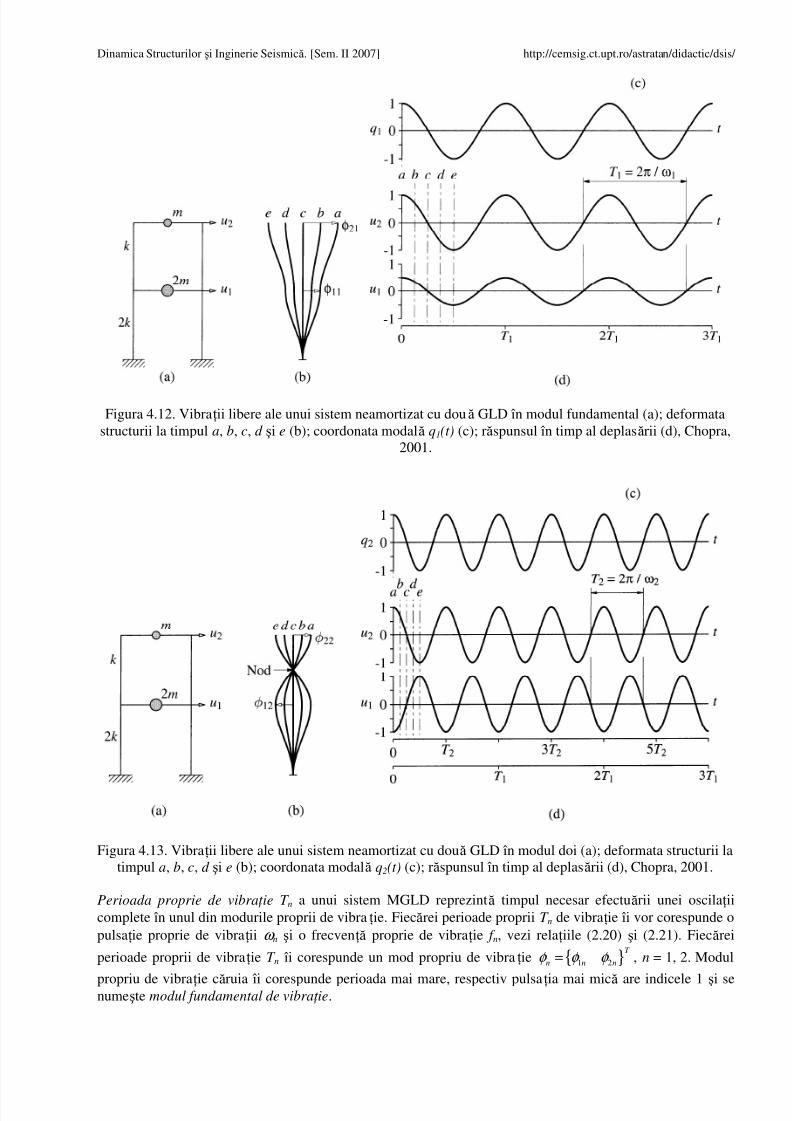
Figura 4.12. Vibraii libere ale unui sistem neamortizat cu două GLD în modul fundamental (a); deformatastructurii la timpul a, b, c, d şi e (b); coordonata modală q1(t) (c); răspunsul în timp al deplasării (d), Chopra,
2001.
Figura 4.13. Vibraii libere ale unui sistem neamortizat cu două GLD în modul doi (a); deformata structurii latimpul a, b, c, d şi e (b); coordonata modală q2(t) (c); răspunsul în timp al deplasării (d), Chopra, 2001.
Perioada proprie de vibra ie T n a unui sistem MGLD reprezintă timpul necesar efectuării unei oscilaiicomplete în unul din modurile proprii de vibraie. Fiecărei perioade proprii T n de vibraie îi vor corespunde opulsaie proprie de vibraii ω n şi o frecvenă proprie de vibraie f n, vezi relaiile (2.20) şi (2.21). Fiecărei
perioade proprii de vibraie T n îi corespunde un mod propriu de vibraie 1 2
T
n n nφ φ φ = , n = 1, 2. Modul
propriu de vibraie căruia îi corespunde perioada mai mare, respectiv pulsaia mai mică are indicele 1 şi senumeşte modul fundamental de vibra ie.

8/8/2019 curs06_dsis Dinamica structurilor şi inginerie seismică
http://slidepdf.com/reader/full/curs06dsis-dinamica-structurilor-si-inginerie-seismica 9/12
4. Sisteme cu mai multe grade de libertate dinamică
77
Reprezentarea grafică a deplasărilor înregistrate de un sistem MGLD care efectuează nişte oscilaii libereneamortizate în modul propriu de vibraie n (vezi Figura 4.12 şi Figura 4.13) poate fi exprimată matematicprin:
( ) ( ) n nnu t q t φ = (4.21)
Deformata φ n nu variază în timp, iar variaia în timp a deplasărilor este dată de o funcie armonică:
( ) cos sinn n n n n
q t A t B t ω ω = + (4.22)
unde An şi Bn sunt constante de integrare care pot fi determinate cunoscând condiiile iniiale.
Combinând ecuaiile (4.21) şi (4.22) obinem:
( ) ( )cos sinn n n nnn
u t A t B t φ ω ω = + (4.23)
unde ω n şi φ n sunt necunoscute. Înlocuind relaia (4.23) în ecuaia de mişcare (4.19) obinem:
[ ] [ ] ( ) 2 0n nn n
m k q t ω φ φ − + = (4.24)
Această ecuaie are două soluii. Prima soluie corespunde qn(t) = 0 ceea ce implică ( ) 0nu t =
, adică sistemul nu oscilează (soluia banală). Cea de-a două soluie se obine pentru:
[ ] [ ] 2nn n
k mφ ω φ = (4.25)
sau
[ ] [ ]( ) 2 0n n
k mω φ − = (4.26)
care se numeşte problemă de valori proprii şi conduce la determinarea scalarilor ω n şi a vectorilor φ n.Ecuaia (4.26) are soluii nenule pentru:
[ ] [ ]( )2det 0n
k mω − = (4.27)
Prin dezvoltarea determinantului se obine un polinom de ordinul N funcie de ω n2 cunoscut sub numele de
ecua ie caracteristică . Această ecuaie are N rădăcini reale şi pozitive ale ω n2, care se numesc valori proprii.
Odată cunoscute valorile proprii ω n2, se pot determina cei N vectori proprii corespunzători φ n, cunoscui
sub denumirea de moduri proprii. Rezolvând problema de valori proprii nu se obin amplitudinile absoluteale vectorilor φ n, ci doar valori relative ale celor N deplasări φ jn ( j = 1… N ), adică doar forma deformateimodale.
Cele N valori proprii şi cele N moduri proprii pot fi reprezentate compact în formă vectorială. Astfel, modulpropriu φ n corespunzător pulsaiei ω n are elementele φ jn ( j = 1… N ), unde j reprezintă gradele de libertate.Cele N moduri proprii pot fi reprezentate matriceal sub forma:
[ ] 11 1
1
1
N
n
N NN
φ φ φ φ
φ φ
Φ = =
(4.28)
Matricea [Φ] se numeşte matricea modală a problemei de valori proprii. Cele N valori proprii ω n2 pot fi
asamblate într-o matrice diagonală [Ω2], care se numeşte matricea spectrală a problemei de valori proprii:
21
2
2 N
ω
ω
Ω =
(4.29)
Folosind notaiile (4.28) şi (4.29), ecuaia (4.25) se poate scrie în formă compactă sub forma:
[ ][ ] [ ][ ] 2k m Φ = Φ Ω (4.30)

8/8/2019 curs06_dsis Dinamica structurilor şi inginerie seismică
http://slidepdf.com/reader/full/curs06dsis-dinamica-structurilor-si-inginerie-seismica 10/12
Dinamica Structurilor şi Inginerie Seismică. [Sem. II 2007] http://cemsig.ct.upt.ro/astratan/didactic/dsis/
4.2.2. Ortogonalitatea modurilor proprii
Modul propriu n satisface ecuaia (4.25). Înmulind această relaie la stânga cu T
r φ (pentru r ≠ n) obinem:
[ ] [ ] 2T T
nr n r nk mφ φ ω φ φ = (4.31)
Similar, modul propriu r satisface ecuaia (4.25). Înmulind relaia corespunzătoare modului r la stânga cu
T
nφ obinem:
[ ] [ ] 2T T
r n r n r k mφ φ ω φ φ = (4.32)
Transpusa unei matrice simetrice este egală cu ea însăşi, iar transpusa produsului a două matrice este egală cu produsul în ordine inversă a matricelor transpuse. Aplicând această proprietate matricelor simetrice demasă şi rigiditate, şi calculând transpusa relaiei (4.31) obinem:
[ ] [ ] 2T T
nn r n r k mφ φ ω φ φ = (4.33)
Făcând diferena dintre ecuaiile (4.33) şi (4.32), obinem:
( ) [ ] 2 2 0T
n r n r mω ω φ φ − = (4.34)
Astfel, pentru ω n2 ≠ ω r
2, care pentru sisteme cu pulsaii pozitive implică ω n ≠ ω r conduce la expresia:
[ ] 0T
n r mφ φ = ω n ≠ ω r (4.35)
Înlocuind ecuaia (4.35) în relaia (4.32) rezultă:
[ ] 0T
n r k φ φ = ω n ≠ ω r (4.36)
Relaiile (4.35) şi (4.36) demonstrează proprietatea de ortogonalitate a modurilor proprii de vibraie.
Ortogonalitatea modurilor proprii de vibraie implică faptul că următoarele matrice sunt diagonale:
[ ] [ ] [ ][ ] [ ] [ ] [ ][ ]T T
K k M m≡ Φ Φ ≡ Φ Φ (4.37)
unde elementele diagonale sunt:
[ ] [ ] T T
n nn n n nK k M mφ φ φ φ = = (4.38)
Deoarece matricele [m] şi [k ] sunt pozitive, elementele de pe diagonalele matricelor [ M ] şi [K ] sunt deasemenea pozitive. Elementele celor două matrice se raportează prin:
2n n n
K M ω = (4.39)
Această relaie poate fi demonstrată înlocuind expresia (4.25) în definiia (4.38)a.
4.2.3. Normalizarea modurilor
Rezolvarea problemei de valori proprii (4.25) duce la determinarea vectorilor proprii, rezultatul reprezentând însă doar valorile relative ale elementelor acestor vectori. Orice alt vector proporional cu φ n va satisfaceecuaia (4.25). Pentru a standardiza modurile proprii de vibraie, acestea se normalizează. Uneorinormalizarea poate consta în egalarea valorii maxime a unui mod propriu cu unitatea. Alteori poate fiavantajoasă egalarea valorii corespunzătoare unui anume GLD (de exemplu deplasarea laterală la ultimulnivel al unei structuri multietajate) cu unitatea. În aplicaiile teoretice şi aplicaiile în programe de calcul esteuzuală normalizarea modurilor proprii astfel ca M n să aibă valori unitare:
[ ] [ ] [ ][ ] [ ]1T T
n n n M m m I φ φ = = Φ Φ = (4.40)
unde [ I ] este matricea unitate. Ecuaia (4.40) indică faptul că modurile proprii obinute în acest mod sunt nudoar ortogonale, ci şi normalizate faă de matricea [m]. Astfel de moduri proprii se numesc ortonormale. Înacest caz relaiile (4.38)a şi (4.37)a devin:

8/8/2019 curs06_dsis Dinamica structurilor şi inginerie seismică
http://slidepdf.com/reader/full/curs06dsis-dinamica-structurilor-si-inginerie-seismica 11/12
4. Sisteme cu mai multe grade de libertate dinamică
79
[ ] [ ] [ ] [ ][ ]2 2 2T T
n n n nn nK k M K k φ φ ω ω = = = = Φ Φ = Ω (4.41)
4.2.4. Dezvoltarea modală a deplasă rilor
Orice set de N vectori independeni poate fi folosit pentru reprezentarea unui alt vector de ordinul N .Modurile proprii pot fi folosite pe postul unor astfel de vectori independen i. Dezvoltarea modală a unuivector arbitrar u este de forma:
[ ] 1
N
r r r
u q qφ =
= = Φ∑ (4.42)
unde qr sunt valori scalare denumite coordonate modale, iar 1 2
T
nq q q q= . Atunci când se cunosc
modurile proprii φ r , pentru un vector u dat, se pot determina coordonatele modale qr multiplicând
ambele pări ale ecuaiei (4.42) cu [ ]T
nmφ :
[ ] [ ] 1
N T T
r n n r r
m u m qφ φ φ =
= ∑ (4.43)
Ca urmare a proprietăii de ortogonalitate (4.35), toi termenii sumei sunt egali cu zero, cu excepia celorcorespunzători r = n. Astfel:
[ ] [ ] T T
nn n nm u m qφ φ φ = (4.44)
Ambele produse fiind valori scalare, se poate scrie:
[ ]
[ ]
[ ] T T
n nn T
nn n
m u m uq
M m
φ φ
φ φ = = (4.45)
4.2.5. Solu ia ecua iei de mi şcare
Răspunsul dinamic al unui sistem neamortizat care efectuează oscilaii libere se obine rezolvând ecuaia demişcare (4.19) cunoscând condiiile iniiale (4.20). S-a arătat că rezolvarea ecuaiei de mişcare a condus laproblema de valori proprii (4.25). Presupunând această problemă rezolvată şi cunoscând pulsaiile şi vectoriiproprii, soluia generală a ecuaiei de mişcare (4.19) se poate determina prin suprapunerea răspunsuluiindividual în fiecare mod propriu dat de ecuaia (4.23):
( ) ( )1
cos sin N
n n n nnn
u t A t B t φ ω ω =
= +∑ (4.46)
unde An şi Bn sunt 2 N constante de integrare. Pentru determinarea acestora este nevoie de expresia vectoruluivitezelor:
( ) ( )1 sin cos
N
n n n n nnn
u t A t B t φ ω ω ω =
= − +∑
(4.47)
Pentru t = 0 ecuaiile (4.46) şi (4.47) devin:
( ) ( ) 1 1
0 0 N N
n n nn nn n
u A u Bφ φ ω = =
= =∑ ∑ (4.48)
Cunoscând deplasările şi vitezele iniiale ( ) 0u şi ( ) 0u , fiecare din ecuaiile (4.48) reprezintă un sistem
de N ecuaii algebrice liniare cu necunoscutele An, respectiv Bn. Însă rezolvarea simultană a acestor ecuaii nu
este necesară, deoarece acestea pot fi interpretate ca şi o dezvoltare modală a vectorilor ( ) 0u şi ( ) 0u .
Folosind ecuaia (4.42), se poate scrie:
( ) ( ) ( ) ( )1 1
0 0 0 0 N N
n nn nn n
u q u qφ φ = =
= =∑ ∑ (4.49)

8/8/2019 curs06_dsis Dinamica structurilor şi inginerie seismică
http://slidepdf.com/reader/full/curs06dsis-dinamica-structurilor-si-inginerie-seismica 12/12
Dinamica Structurilor şi Inginerie Seismică. [Sem. II 2007] http://cemsig.ct.upt.ro/astratan/didactic/dsis/
unde, analogic relaiei (4.45), coordonatele modale ( )0n
q şi ( )0n
q sunt date de:
( ) [ ] ( )
( ) [ ] ( ) 0 0
0 0
T T
n n
n n
n n
m u m uq q
M M
φ φ = =
(4.50)
Ecuaiile (4.48) şi (4.49) sunt echivalente, ceea ce implică ( )0n n
A q= şi ( )0n n n
B q ω = . Înlocuind aceste
expresii în relaia (4.46) obinem:
( ) ( )( )
1
00 cos sin
N n
n n nnn n
qu t q t t φ ω ω
ω =
= +
∑
(4.51)
sau, alternativ:
( ) ( )1
N
nnn
u t q t φ =
= ∑ (4.52)
unde
( ) ( )
( )0
0 cos sinn
n n n n
n
q
q t q t t ω ω ω = +
(4.53)
reprezintă variaia în timp a coordonatelor modale, care sunt similare expresiei oscilaiilor libereneamortizate ale unui sistem SGLD. Ecuaia (4.51) reprezintă soluia ecuaiei de mişcare în cazul oscilaiilorlibere neamortizate ale unui sistem MGLD. Aceasta constă din vectorul deplasărilor u care variază în timpşi se datorează deplasărilor iniiale ( )0u şi vitezelor iniiale ( )0u . Dacă se cunosc pulsaiile proprii ω n şi
vectorii proprii φ n, partea dreaptă a relaiei (4.51) este cunoscută, cu expresiile ( )0n
q şi ( )0n
q date de
(4.50).