Curs Bcemai
94
Conf. Univ. Dr. Ing. CHIOREANU Nicolae BAZELE CERCETĂRII EXPERIMENTALE A MOTOARELOR CU ARDERE INTERNĂ Note de curs 2011 - 2012
-
Upload
johnnyboby -
Category
Documents
-
view
22 -
download
0
Transcript of Curs Bcemai

Conf. Univ. Dr. Ing. CHIOREANU Nicolae
BAZELE CERCET ĂRII EXPERIMENTALE A
MOTOARELOR CU ARDERE INTERN Ă
Note de curs
2011 - 2012

2
CUPRINS
C1. Activitatea de cercetare ştiin ţifică fundamentală şi aplicativă, şi de dezvoltare tehnologică
C2. Măsurare. Mijloace de măsurat
C3. Elementele componente ale aparatelor de măsurat
C4. Parametri generali ai aparatelor de măsurare
C5. Aparate şi metode de măsurare. Metode de măsurare a parametrilor de stare
C6. Aparate şi metode de măsurare a parametrilor cinematici
C7. Aparate şi metode de măsurare a forţei şi momentului
C8. Aparate şi metode de măsurare a vibraţiilor şi zgomotului
C9. Standuri de încercare şi experimentare
C10. Prelucrarea datelor experimentale

3
C1. Activitatea de cercetare ştiin ţifică fundamentală şi aplicativă, şi de dezvoltare tehnologică
1.1. Cercetarea ştiin ţifică
Activitatea de cercetare ştiinţifică asigură acumularea de cunoştinţe noi, care asigură progresul la dezvoltarea tehnologică. Pentru a se menţine pe piaţă, producătorii de m.a.i. trebuie să desfăşoare o activitate permanentă de implementare a rezultatelor obţinute de cercetarea ştiinţifică, pentru creşterea performanţelor şi perfecţionarea acestor produse.
Activităţile privind creşterea performanţelor şi perfecţionarea produselor sunt denumite “inovare de produse”. Inovarea de produse implică activităţi complexe de cercetare ştiinţifică şi de proiectare. Ele se grupează în trei categorii mari: cercetarea fundamentală; cercetarea aplicativă sau industrială; şi dezvoltarea experimentală sau tehnică.
Cercetarea fundamentală urmăreşte să extindă limitele de cunoaştere, fără să aibă în vedere o anumită aplicare practică. Ea stă la baza oricărui progres ştiinţific, iar rezultatele cercetării pot produce efecte aplicabile mai repede sau mai târziu.
Activităţile principale ale cercetării fundamentale sunt: formare şi verificare de ipoteze; elaborare de modele conceptuale şi teorii; elaborare de modele matematice şi de modele virtuale.
Cercetare aplicativă (industrială) urmăreşte implementarea în circuitul economic a rezultatelor obţinute de cercetarea fundamentală. Este o activitate de investigaţie planificată.
Obiective cercetării aplicative sunt: studii şi analize pentru elaborarea modelelor funcţionale; elaborarea documentaţiei tehnice (calcule de proiectare, desene tehnice, etc.) pentru modelele funcţionale; realizarea şi experimentarea modelelor funcţional. În urma experimentărilor se verifică funcţionalitatea şi utilitatea modelului funcţional. De asemenea, se verifică veridicitatea modelului matematic şi a calculelor de proiectare.
Dezvoltarea experimentală (tehnică) urmăreşte introducerea în circuitul economic de produse şi tehnologii noi sau semnificativ îmbunătăţite. Este o activitate de investigaţie planificată, şi se bazează pe cunoştinţe şi competenţe dobândite la cercetarea aplicativă.
Activităţile principale ale dezvoltării experimentale sunt: elaborarea documentaţiei tehnico-economice pentru produse, tehnologii, etc.; realizarea şi experimentarea prototipurilor; proiectarea şi realizarea tehnologiei de fabricare pentru produse. Divizarea activităţilor de cercetare este în general artificială. De exemplu, pentru verificarea unei ipoteze, idee sau concept este necesar conceperea şi realizare de experimente (modele funcţionale). Numai în urma experimentărilor se poate confirma veridicitatea ipotezei sau a ideii.
Activităţilor de cercetare ştiinţifică privind „Inovare de produse” se realizează în laboratoare special amenajate. Laboratoarele trebuie să fie dotată cu toata infrastructura de cercetare necesară, inclusiv echipamente pentru proiectarea asistată de calculator. În general, infrastructura de cercetare este formată din echipamente pentru încercare şi experimentare, şi aparatura de măsurare şi control.

4
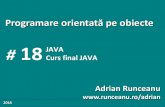
Organigrama activităţilor pentru „Inovare de produs” este prezentată în figura 1.1.
Inovarea de produse implică resurse umane şi financiare însemnate. Pentru a creste eficienţa, este necesar să se facă o programare şi o organizare riguroasă a acestor activităţii. În general, programarea şi organizarea activităţilor de inovare este dificilă datorită factorului de incertitudine mare, care există în orice activitate reală de cercetare.
INOVARE DE PRODUS
CERCETARE INDUSTRIAL Ă
CERCETARE FUNDAMENTAL Ă
DEZVOLTARE EXPERIMENTAL Ă
For
mul
are şi
ver
ifica
re d
e ip
otez
e
Ela
bora
re d
e m
odel
e co
ncep
tual
e şi
teor
ii
Ela
bora
re d
e m
odel
e m
atem
atic
e şi
de
mod
ele
virt
uale
Stu
dii ş
i ana
lize
pent
ru e
labo
rare
de
mod
ele
funcţio
nale
Pro
iect
area
şi e
labo
rare
a do
cum
entaţie
i teh
nice
pen
tru
mod
elel
e fu
ncţio
nale
Rea
lizar
ea şi
exp
erim
enta
rea
mod
elel
or e
xper
imen
tare
Pro
iect
area
şi e
labo
rare
a do
cum
entaţie
tehn
ico-
econ
omică
pe
ntru
pro
duse
, teh
nolo
gii,
etc.
Rea
lizar
ea şi
exp
erim
enta
rea
prot
otip
urilo
r
Pro
iect
area
şi r
ealiz
area
te
hnol
ogiil
or d
e fa
bric
are
a pr
odus
elor
Figura 1.1. Organigrama activităţilor pentru „Inovare de produs”
Pentru realizarea activităţilor de cercetare şi dezvoltare experimentale sunt necesare cunoştinţe şi competenţe privind: tehnica măsurării; metodologia de organizare şi desfăşurare a experimentelor; prelucrarea şi analizarea datelor experimentare.
Obiectivul acestui curs este prezentarea cunoştinţelor de bază cu accentuarea cunoştinţelor privind experimentarea m.a.i.
1.2. Scurt istoric al dezvoltării m.a.i.
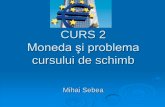
Primul m.a.i. a fost brevetat de inginerul Etienne Lenoir în anul 1860. A fost un motor m.a.s. în doi timpi, cu gaz de iluminat1. Procesul de admisie a amestecului aer-gaz de iluminat se produce în prima jumătate a cursei pistonului (fig. 1.2). După aprinderea şi arderea amestecului se produce destinderea gazelor de ardere. Procesul de destindere se termină la capătul cursei pistonului. După deschiderea supapei de evacuare, are loc evacuarea gazelor de ardere. Procesul de evacuare se desfăşoară pe parcursul celei de-a doua cursă a pistonului.
1 Gazul de iluminat se obţine prin tratare termică la temperatură înaltă a cărbunilor care conţin substanţe volatile (huila).

5
Randamentul motorului este foarte mic (η=0,03÷0,04), deoarece din ciclul termic lipseşte procesul de comprimare a încărcăturii proaspete.
gaz
nSE
SAB
aer
pvm pvM
Figura 1.2. Schema de funcţionare a motorului cu gaz de iluminat
Importanţa comprimării amestecului carburant înaintea arderii este subliniat de inginerul francez Alphonse Beau de Rochas într-o lucrare ştiinţifică publicată în anul 1862. În lucrare se prezintă rezultatele de cercetare fundamentală privind ciclul termic în patru timpi cu ardere izocoră. Aplicarea acestor rezultate a fost făcută de inginerul german Nikolaus August Otto. După 12 ani de experimentări, Otto brevetează în anul 1876 primul motor cu ciclul termic în patru timpi. Motorul avea un raport de comprimare de 2,5 (ε=2,5), şi un randament η=0,1÷0,15 . Primul motor cu amestec carburant format prin pulverizare de combustibili volatili, a fost brevetat în anul 1879 de inginerul rus I. S. Kostovici.
Motorul Otto numit motor cu aprindere prin scânteie (m.a.s.) reprezintă un progres în dezvoltarea m.a.i. deoarece prin comprimarea amestecului carburant randamentul motorului creste. În anul 1892 inginerul german Rudolf Augustus Diesel propune un concept nou de desfăşurare a ciclului termic, care se bazează pe pulverizarea combustibilului la sfârşitul procesului de comprimare a aerului. Aerul aspirat în camera cu volum variabil al motorului, este comprimat la un raport de comprimare mare (ε=14÷23). Datorită temperaturii mari a aerului la sfârşitul procesului de comprimare, picăturile de combustibil pulverizate de injector se evaporă foarte repede, după care, amestecul carburant rezultat se autoaprindere.
Motorul Diesel numit motor cu aprindere prin comprimare (m.a.c.) reprezintă un progres în dezvoltarea m.a.i. deoarece se poate mări mult raportul de comprimare. Prin mărirea raportului de comprimare, randamentul motorului creste. Primele construcţii de m.a.c. au fost realizate de Rudolf Diesel şi inginerul rus G. V. Trinkler.
În anul 1998 inginerul român N. L. Chioreanu propune un concept nou privind motoare cu funcţionare într-un singur regim. Concept constă în alimentarea cu energie a maşinii motoare de la un acumulator de energie. Încărcarea acumulatorului este realizată de un generator de energie, care funcţionează într-un singur regim (monoregim) cu randament maxim. Conceptul presupune realizarea de motoare, formate în general din: generator de energie GE, acumulator de energie AE, şi maşină motoare MM, în care se produc două transformări energii, transformarea primară şi transformarea secundară (fig. 1.3).

6
Transformarea primară este realizată de generatorul de energie, care transformă energia de intrare (termică sau electrică) în altă formă de energie (energie fluidică). Energia produsă de generator este stocată în acumulatorul AE. Transformarea secundară este realizată de maşina motoare MM , care preia energia stocată în acumulator şi o transformă în energie mecanică, în general sub formă de mişcare de rotaţie.
Funcţionarea motorului este următoarea: generatorul GE transmite energia produsă la acumulatorul AE până când valoarea energiei din acumulator este maximă admisă. În acest moment, în mod automat generatorul se opreşte din funcţionare până când energia din acumulator scade la valoarea minimă admisă. În felul acesta, generatorul GE poate funcţiona într-un singur regim cu randament maxim, independent de regimul de funcţionare a maşinii motoare MM . Maşina motoare preia energia din acumulator şi o transformă în energie mecanică la puterea necesară acţionării organelor de lucru ale sistemului. Fluxul de energie poate avea ambele direcţii, generator-acumulator şi invers, sau acumulator-maşină motoare şi invers.
Motorul funcţionează eficient dacă generatorul de energie GE, îndeplineşte următoarele condiţii: să producă o formă de energie care să poată fi uşor stocată de acumulatorul AE şi uşor transmisă la maşina motoare MM; să funcţioneze într-un singur regim, automat pe principiul pornire-oprire, caracterizat prin pornire automată, atunci când energia din acumulator are valoarea minimă admisă, şi oprire automată, atunci când energia din acumulator are valoarea maximă admisă. Formele de energie care îndeplinesc condiţiile arătate sunt: energia hidrostatică; şi energia pneumatică. Energia hidrostatică este folosită într-o gamă largă de puteri şi domenii de aplicaţii.
Acţionările hidrostatice sunt bine cunoscute şi considerate superioare faţă de celelalte acţionări existente. Energia pneumatică este folosită la puteri mici. În general, acţionările pneumatice sunt folosite în domenii restrânse de activitate.
GE AE MM
Figura 1.3. Schema de funcţionare a motoarelor monoregim
După forma de energie pe care o produc, generatoarele se clasifică în: generatoare hidrostatice, şi generatoare pneumatice. Generatoarele hidrostatice care transformă energia termică, se numesc generatoare termohidraulice monoregim, iar generatoarele hidrostatice care transformă energia electrică, se numesc generatoare electrohidraulice monoregim. Acumulatorul de energie, este un acumulator hidropneumatic obişnuit. Maşina motoare este un motor (motoare) hidraulic rotativ reversibil cu capacitate reglabilă. Aceste tipuri de motoare permit varierea turaţiei într-o gama largă şi pot recupera energia de frânare. Motoarele monoregim fac parte din categoria motoarelor hibrid de tip termohidraulic sau electrohidraulic. Ele reprezintă o noutate absolută. Sunt cunoscute motoare hibrid de tip termoelectric (hibrid serie şi hibrid paralel) la care se produc trei transformări de energie:

7
energia termică se transformă în energie mecanică (prin motor termic); energia mecanică se transformă în energie electrică (prin generator de energie electrică); energia electrică se retransformă în energie mecanică (prin motoare electrice) sau se stochează în acumulatoare electrice. La noile motoare se produc numai două transformări de energii: energia termică sau electrică se transformă în energie hidrostatică sau pneumatică (prin generatorul de energie); energia hidrostatică sau pneumatică se transformă în energie mecanică (prin motoare hidraulice sau pneumatice).
Motoarele monoregim se caracterizează prin următoarele particularităţi: funcţionare într-un singur regim (monoregim); fără momente de funcţionare în gol. Se estimează următoarele avantaje (faţă de actualele sisteme de acţionate cu motoare cu ardere internă sau cu motoare electrice): consum redus de combustibil sau energie electrică şi emisiuni de noxe poluante mai reduse (este mult mai uşor să optimizezi un singur regim faţă de o infinitate, aşa cum se produc la motoarele actuale); simplitate constructivă; şi fiabilitate mai mare. De asemenea, motorul monoregim poate prelua, parţial sau total funcţiile transmisiei (modificarea cuplului, turaţiei, şi sensul de rotaţie), inclusiv funcţia de frânare cu recuperarea energiei.
Noul concept privind funcţionarea motoarelor într-un singur regim (motoare monoregim), reprezintă o direcţie nouă de cercetare, evident, este mult mai uşor de optimizat un singur regim, faţă de o infinitate, aşa cum se produc la motoarele actuale.
În urma activit ăţilor de dezvoltare tehnologică, performanţele m.a.i. privind randamentul, puterea şi reducere emisiunile de noxe poluante, s-au îmbunătăţit în mod continuu.
Principalele etape de dezvoltare a m.a.s. sunt:
• Înlocuirea gazul de iluminat cu combustibili lichizi volatili. În anul 1895 Daimler brevetează primul dispozitiv de pulverizare a benzinei în aer, denumit carburator Phoenix;
• Înlocuirea aprinderii cu tub incandescent, prin aprindere electrică. Magnetoul a fost introdus de Robert Bosch în anul 1905. Sistemul de aprindere cu baterie a apărut în anul 1925 în SUA. Microprocesorul pentru controlul şi comanda aprinderii şi injecţiei de benzină a apărut în anul 1979;
• Amplasarea supapelor şi inclusiv arborele cu came în chiulasă. Principalele etape de dezvoltare a m.a.c. sunt:
• Înlocuire injectorului pneumatic cu injectorul mecanic. Primul motor cu injecţie mecanică a fost realizat de inventatorul rus I. V. Mamin în anul 1903;
• Introducerea camerei de ardere divizată şi injecţia directă cu cameră de ardere în capul pistonului;
• Din anul 1960 s-a trecut la aplicarea pe scară a turbosupraalimentării.
Sunt în fază de experimentare o serie de inovaţii tehnologice:
• La m.a.s. se experimentează: injecţia de benzină în cilindru; stratificarea amestecului aer-combustibil; postarderea sau cataliza; aprinderea piezoelectrică; utilizarea combustibililor neconvenţionali; etc.
• La m.a.c. se experimentează: injectoare de înaltă presiune cu comandă electronică; motor adiabatic; etc. Motorul (aparent) adiabatic are o parte a spaţiului de ardere izolat termic prin placare cu materiale ceramice.
Alte rezultate ale cercetării ştiinţifice privind perfecţionarea m.a.i. sunt motoarele cu piston rotativ . La aceste motoare pistonul se roteşte în interiorul unei carcase fixe. Între carcasă şi

8
piston se formează camere cu volum variabil în care se desfăşoară procese ale ciclului termic. Prin înlocuirea mişcării de translaţie cu mişcare de rotaţie a pistonului, se elimină forţele de inerţie specifice motoarelor cu piston alternativ, şi în felul acesta se evită solicitările variabile ale organelor motorului şi trepidaţiile acestora. Cele mai cunoscute motoare cu piston rotativ sunt: motorul Wankel; motorul Karol; şi motorul Sarich.
1.3. Direcţiile principale pentru perfecţionarea m.a.i.
Direcţiile principale ale cercetării ştiinţifice privind perfecţionarea m.a.i. sunt: reducerea consumului de combustibil; şi reducerea emisiunilor de noxe poluante.
Căile de reducere a consumului de combustibil la nivelul proceselor termice sunt: supracomprimarea la motoarele cu aprindere prin scânteie, până la limita de detonaţie (prin avans optim de declanşarea scânteii, prin modificarea arhitecturii camerei de ardere, prin formare de amestec stratificat); arderea amestecurilor sărace la motoarele cu aprindere prin scânteie, α>1 (coeficient de dozaj supraunitar), prin modificarea camerei de ardere şi distribuţie neuniformă a amestecului carburant (stratificarea amestecului); reducerea pierderilor de căldura, prin izolarea parţială sau totală (cu materiale ceramice) a spaţiului de ardere (motor adiabat); creşterea la motoarele cu aprindere prin comprimare a raportului de comprimare (ε=19-23) şi a presiunii maxime a ciclului (pgmax=90-130 bar); destinderea prelungită a gazelor de ardere; supraalimentarea; optimizarea regimului termic în funcţie de sarcină şi frecvenţa ciclurilor; reducerea pierderilor prin frecare. Este cunoscută dependenţa emisiunilor de noxe poluante, de regimul de funcţionare a motorului. Principalele măsuri pentru reducerea noxelor poluante sunt: controlul calităţii amestecului carburant; optimizarea arhitecturii camerei de ardere; modificarea avansului de declanşare a scânteii/injecţiei; modificarea raportului de comprimare; modificarea duratei de deschidere simultana a supapelor. Modificarea acestor parametri în funcţie de regimul de funcţionare se poate face cu dispozitive complicate, iar în unele cazuri aceste modificări sunt imposibile (de exemplu, modificarea arhitecturii camerei de ardere). În concluzie, optimizarea privind reducerea consumului de combustibil şi a noxelor poluante se realizează mult mai greu la motoarele care funcţionează în regim variabil.
La motoarele termice monoregim, aplicarea măsurilor cu privire la reducerea consumului de combustibil şi reducerea emisiunilor de noxe poluante se face mai uşor şi eficient, fără dispozitive speciale (automate) pentru reglare. Partea termică (generatorul termohidraulic) funcţionează numai într-un singur regim cu randament maxim, şi nu are momente de funcţionare în gol. Raportul de comprimare şi presiunea maximă a gazelor de la generator se poate mări, deoarece etanşeitatea (la nivelul segmenţilor) este mai bună şi frecările mai reduse (nu există forţe radiale, asupra pistonului acţionează numai forte de comprimare şi întindere dispuse axial). De asemenea, nu are: mecanisme de transformare a mişcării rectilinie-alternativă (mecanism motor, mecanism cu came, etc.); sisteme de reglare a parametrilor în timpul funcţionării; şi sistem de pornire.
Datorită modului de concepţie, noile motoare termice sunt mai simple din punct de vedere constructiv, faţă de cele actuale. Motorul termic monoregim poate prelua parţial (cu un singur motor hidraulic) sau total, funcţiile transmisiei (în cazul în care se cuplează câte un motor hidraulic la fiecare organ de lucru). De asemenea, motorul termic monoregim poate realiza frânarea în mod eficient cu recuperarea energiei, prin trecerea motorului hidraulic din regim de motor în regim de pompă.
În concluzie, cercetarea experimentală privind creşterea randamentului termic al motorului monoregim este facilitată de funcţionarea parţii termice numai într-un singur regim.

9
C2. Măsurare. Mijloace de măsurat
2.1. Noţiuni generale
Pentru investigarea unui proces fizic (proces termodinamic) este necesar evaluarea cantitativă sau intensivă a unor mărimi fizice caracteristice. Evaluarea cantitativă sau intensivă a mărimilor fizice se face printr-o operaţie, numită măsurare. La măsurare se determină valoarea (numerică) a mărimii fizice prin comparaţia ei cu o altă mărime de aceeaşi natură aleasă în mod convenţional unitate de măsură. Comparaţia se poate face direct sau indirect.
La măsurarea prin comparaţie directă, valoarea mărimii măsurate este direct perceptibilă. Măsurarea se realizează cu ajutorul unui dispozitiv, numit instrument de măsurat sau măsură, iar valoarea măsurată se obţine prin comparare directă. De exemplu, pentru măsurarea mărimilor geometrice (lungime, unghi, etc.) se folosesc măsuri cu valoare constantă (cale, calibre, echer, etc.) sau cu valoare variabilă (rigle, rulete, raportoare, etc.), sau instrumente cu vernier sau cadran (şubler, micrometru, etc.).
La măsurarea prin comparaţie indirectă, valoarea mărimii măsurate nu este perceptibilă de simţurile umane sau este perceptibilă pe un domeniu restrâns. Măsurarea se realizează cu un dispozitiv numit aparat sau sistem (instalaţie) de măsurare. Acesta stabileşte o dependenţă între mărimea de măsurat şi o altă mărime perceptibilă. Valoarea mărimii măsurate este redată de dispozitivul indicator sau înregistrator al aparatului. Elementul de bază al aparatului de măsură este captorul, numit şi senzor. Captorul interacţionează cu mediul supus măsurării, iar în urma acţiuni mărimii măsurate emite un semnal. Semnalul emis de captor se numeşte semnal metrologic, dependent de valoarea mărimii măsurate.
Aparatul care redă variaţia mărimii măsurate sub forma unei funcţii continue, se numeşte aparat de măsurare analogic, iar aparatul care redă variaţia mărimii măsurate sub forma unui şir de numere, se numeşte aparat de măsurare digital. Măsurătorile înregistrate sub formă numerică se pot prelucra cu ajutorul calculatoarelor electronice.
Pentru producerea semnalului metrologic captorul consumă energie, care este prelevată din mediul supus investigării, sau de la o sursă auxiliară. Acest consum de energie trebuie să fie cât mai mic, pentru a reduce la minim influenţa aparatului asupra evoluţiei procesului supus măsurării. Influenţa de natură energetică a aparatului de măsurat, asupra evoluţiei procesului se numeşte efect de sarcină.
Mărimea care se determină cu aport de energie din mediului investigat se numeşte mărime activă, iar mărimea care se determina fără aport de energie din mediului investigat, se numeşte mărime pasivă. Mărimile pasive se referă în general la proprietăţi de material. Pentru determinarea acestor mărimi, materialul trebuie conectat la un flux de energie (energie de activare). De exemplu, pentru măsurarea rezistenţei electrice materialul trebuie conectat într-un circuit electric, pentru determinarea conductibilităţii termice materialul trebuie conectat la un flux termic, etc.
În funcţie de principiul de funcţionare, captoarele se clasifică în captoare parametrice şi în captoare generatoare. La captoarele parametrice, sub acţiunea mărimii măsurate elementul sensibil îşi modifică parametri. Valoarea unui parametru modificat se pune în corespondenţă

10
cu valoarea mărimii măsurate. De exemplu, dacă elementul sensibil al captorului este un lichid, în urma interacţiunii termice volumul acestuia se dilată, lungimea coloanei se modifică proporţional cu temperatura, valoarea mărimii măsurate (temperatura) este dată de lungimea coloanei de lichid al elementului sensibil. La captoarele generatoare, energia prelevată se transformă într-un semnal de natură mecanică (deplasare) sau de natură electrică (diferenţă de potenţial). De exemplu, captorul cu membrană elastică, sub acţiunea presiunii mediului investigat, produce un semnal de natură mecanică, deformarea membranei. În general, forma de energie a semnalul emis de captor este diferită de forma de energie prelevată. Captorul care emite semnal de natură electrică, se numeşte traductor. Semnalul electric se poate prelucra şi transmite uşor. Datorită acestor avantaje, majoritatea aparatelor de măsură folosite la investigarea proceselor termice al motoarelor cu ardere internă sunt cu traductor.
2.2. Traductoare. Principii de funcţionare
Traductoarele emit un semnal electric dependent de valoarea mărimii măsurate. Partea principală a traductorului este elementul sensibil, denumit şi senzor. Sub acţiunea mărimii de intrare se modifică starea elementului sensibil, care reprezintă informaţia necesară determinării valorii mărimii măsurate. Elementul sensibil trebuie să aibă proprietatea de a detecta numai mărimea măsurată, să elimine sau să reducă la minim influenţele pe care le exercită celelalte mărimi fizice ale mediului investigat. În funcţie de principiul de detectare a mărimii măsurate, traductoarele se clasifică în traductoare parametrice şi traductoare generatoare.
2.2.1. Traductoare parametrice
Traductoarele parametrice sunt prevăzute cu un element sensibil de natură electrică rezistenţă, bobină, sau condensator. La interacţiunea cu mediul investigat elementul sensibil îşi modifică parametri. Se urmăreşte modificarea acelui parametru care variază în funcţie de valoarea mărimii măsurate. Traductoarele parametrice se clasifică după parametru care se modifică, în: traductoare rezistive; traductoare inductive; traductoare capacitive; şi traductoare fotoelectrice. Traductoarele rezistive. Traductoarele rezistive sunt prevăzute cu un element sensibil format dintr-o rezistenţă electrică confecţionată din material conductor (metalic sau nemetalic) sau semiconductor. Rezistenţa electrică este un parametru care depinde de dimensiunile, temperatura şi de natura materialului din care este confecţionat conductorul sau semiconductorul. Ea arată gradul de opunere (rezistenţa) la trecerea curentului electric. Valoarea rezistenţei unui conductor omogen de secţiune constantă, se determină cu relaţia:
][Ω⋅=A
lR eρ (2.1)
unde: ρe este rezistivitatea conductorului, în Ω ⋅ m ; l este lungimea conductorului, în m ; A este aria secţiunii conductorului, în m2.
Rezistivitatea ρe depinde de temperatură. La conductoare variaţia relativă a conductibilităţii este liniară în funcţie de temperatură (pentru diferenţe mici), iar la semiconductoare (numite şi termistore) scade după o funcţie exponenţială. La majoritatea metalelor rezistenţa electrică creşte), iar la alte metale (constantan) şi nemetale (grafit), etc., rezistenţa electrică scade.

11
Prin logaritmarea şi diferenţierea relaţiei (2.1), rezulta:
A
dA
l
dld
R
dR
e
e −+=ρρ
(2.2)
Dacă se modifică numai lungimea l a conductorului, variaţia rezistenţei este: ldlRdR = . Rezistenţa cu variaţie continuă în funcţie de lungimea l a conductorului se numeşte potenţiometru sau reostat. Potenţiometrul este format dintr-un suport izolator pe care este înfăşurat conductorul cu rezistenţa totală R0. Prin culisarea cursorului C pe suprafaţa suportului, se produce modificarea în mod continuu a rezistenţei electrice (fig. 2.1 a).
a)
b)
x
x
U
0
e
U0
x
U0
0x
R0
Ue
x
i 0
e
0R
c)
i 0
x
U0
0
x
U R in
(Di)
i 0 i e
i x
(C)
Figura 2.1. Traductor potenţiometric
Din schema electrică a traductorului (fig. 2.1 b), rezultă:
00 U
U
x
x e= (2.3)
unde: Ue este tensiunea de ieşire; U0 este tensiunea de alimentare; x0 este cursa cursorului; x este poziţia cursorului. Rezultă, poziţia x a cursorului este direct proporţională cu tensiunea de ieşire Ue. Deoarece dispozitivul indicator Di este caracterizat printr-o rezistenţă internă Rin, poziţia x a cursorului nu are o variaţie liniară cu tensiunea de ieşire (fig. 2.1 c):
−⋅+=
x
x
R
R
x
xU
U
in
e
0000 1
1 (2.4)

12
Abaterea de la liniaritate a traductorului este cu atât mai redusă cu cât rezistenţă internă Rin a dispozitivului indicator are valoare mai mare.
Puterea maximă 020 RUP = a potenţiometrului se limitează la 5 W. Dacă puterea depăşeşte
acesta limită, caracteristica potenţiometrului variază. Rezistenţa potenţiometrului se limitează la R0=(100 ÷ 20 000) Ω în condiţiile în care tensiunea de alimentare U0 să fie suficient de mare încât, aparatul de măsurare să realizeze sensibilitatea necesară.
La o variaţie de temperatură dT a mediului care se investighează, rezistivitatea şi dimensiunile conductorului din care se confecţionează rezistenţa se modifică. În general, variaţia rezistenţei în funcţie de coeficientul de dilatare a materialului este mică, care se poate neglija. Variaţiei rezistenţei în funcţie de temperatură, se evaluează cu următoarea relaţie:
dTcR
dRT ⋅= (2.5)
unde : cT este coeficientul de temperatură a traductorului.
Elementul sensibil al traductorului este format dintr-o rezistenţă înfăşurată pe un suport izolant, şi este protejată de mediul supus măsurării printr-un tubul (teaca). Rezistenţa se confecţionează din conductor metalic sau semiconductor. Rezistenţa din conductor metalic este sub formă de sârmă, cu valoarea rezistenţei electrice cuprinsă între (10 ÷ 30) Ω . Materialul conductorului se alege în funcţie de valoarea domeniului de măsurare, cupru (30 ÷ 150) 0C; nichel (50 ÷ 300) 0C; wolfram ( -50 ÷ 600) 0C; platină (-200 ÷ 800) 0C. Elementul sensibil realizat din material semiconductor numit şi termistor, are formă de perlă sau baghetă de dimensiuni miniaturale cu valoarea rezistenţei electrice cuprinsă între (500 ÷ 5 000) Ω. Se confecţionează prin sinterizare din pulberi de oxizi metalici (de nichel, mangan, cobalt, etc.) sau din pulberi ceramice.
Dacă conductorul electric este supus unei deformaţii mecanice longitudinale, dimensiunile lui se modifică în funcţie de alungirea specifică longitudinală ldll =ε şi deformaţia specifică
transversală DdDt =ε a materialului; unde: l este lungimea conductorului, în m; D este
diametrul conductorului, în m. Se notează cu ltl εεµ −= coeficientul Poisson, şi se
consideră că rezistivitatea ρe nu se modifică. Prin prelucrarea relaţiei (2.2) rezultă variaţiei rezistenţei în funcţie de deformaţie:
lRcR
dR ε⋅= (2.6)
unde: lRc µ⋅+= 21 este coeficientul tensometric al traductorului.
Elementul sensibil al traductorului se numeşte marcă tensometrică. Ea se realizează conductor din material metalic sau din material semiconductor. Conductorul din material metalic poate fi sub formă de fir sau folie, fixat pe suport sub forma unui grilaj. Conductorul din material semiconductor este sub forma unei lamele.
Marca tensometrică cu fir este formată dintr-un conductor confecţionat din aliaj metalic (1) (cupru-nichel, fier-nichel, nichel-crom, platin-iridiu) foarte subţire (0,002 ÷ 0,05) mm fixat prin lipire pe suportul (2) (hârtie, răşină, bachelită, mică). De capetele firului se lipesc conductori din cupru (3) prin care se face legătura cu circuitul electric de măsurare (fig. 2.2 a). Peste elementul sensibil al mărcii se lipeşte o foiţă subţire pentru protecţie.

13
Marca tensometrică cu folie este format dintr-un conductor metalic (1) confecţionat din foiţă foarte subţire (1 ÷ 12) µm, fixat pe un suport din material plastic (2). Grilajul folie se obţine prin decupare fotochimică a foiţei metalice depusă în prealabil pe suport (fig. 2.2 b).
Parametri mărcilor cu fir sau folie au următoarele valori: lungimea l = (2,5 ÷ 7,5) mm; rezistenţa electrică a senzorului R = (50 ÷ 1000) Ω; coeficientul tensometric cR = 1,7 ÷ 3,6 .
a) b) c)
l l
1 2 3 1 2 3 1 2 3
Figura 2.2. Mărci tensometrice
Marca tensometrică cu semiconductor este format din lamela (1) (lungime (2 ÷ 7) mm, lăţime (0,1 ÷ 0,5) mm, grosime (0,01 ÷ 0,05) mm), confecţionat din material semiconductor (siliciu, germaniu), fixat pe suportul (2). Conectarea la circuitul electric de măsurare se face prin conductori din cupru (3) (fig. 2.2 c) Mărcile tensometrice cu semiconductoare au coeficientul tensometric mult mai mare decât al mărcilor cu fir sau folie, cR = 100 ÷ 150 .
Traductoarele inductive. Traductoarele inductive sunt prevăzute cu un element sensibil format dintr-o bobină. Bobina este un dispozitiv electric format dintr-un anumit număr de spire înfăşurate pe un suport feromagnetic, numit miez magnetic. La unele bobine miezul magnetic lipseşte. Mărimea caracteristică a bobinei este inductanţa sau inductivitatea. Elementul sensibil face parte dintr-un circuit magnetic construit în aşa fel încât caracteristica lui să poată fi modificată de acţiunea mărimii măsurate. Circuitul magnetic este format dintr-o succesiune de corpuri feromagnetice pe care se pot înfăşura bobinele. Corpurile feromagnetice pot fi separate de spaţii mici de aer numite întrefieruri.
Inductanţa L a bobinei dintr-un circuit magnetic, se determină cu relaţia:
][2
20
2
HNA
R
NL îf
m δµ
⋅⋅⋅
≅= (2.7)
unde: N este numărul de spire ale bobinei; Rm este reluctanţa circuitului magnetic, în Asp/Wb; Aîf este secţiunea întrefierului, în m2; δ este lungimea întrefierului, în m; µ0 este permeabilitatea magnetică a aerului, mH7
0 104 −⋅⋅= πµ .

14
Reluctanţa Rm a circuitului magnetic depinde de lungimea l f a circuitului magnetic, de secţiunea Af şi permeabilitatea relativă µrf a corpurilor magnetice, şi de secţiunea Aîf şi lungimea δ a întrefierului (fig. 2.3 a):
][221
00
WbAspAAA
lR
îfîffrf
fm ⋅
⋅≅
⋅+⋅
⋅=µ
δδµµ
(2.8)
Din relaţia (2.8) rezultă că, reluctanţa Rm variază aproximativ liniar cu distanţa δ a întrefierului, deoarece permeabilitatea fierului µf este foarte mare,
0µµµ frf = =10000÷15000. Traductoarele cu întrefier variabil se numesc traductoare
inductive de reluctanţă variabilă. Avantajele acestor traductoare sunt, elementul mobil (armătura) poate fi chiar piesa a cărui deplasare se determină, şi între piesa în mişcare şi partea fixă (jug) nu există contact.
a)
0
L
jug
i
~
δ
armatura
δ
b)
δ
∆δ=(0,1−0,15) δ0
u
Figura 2.3. Traductor inductiv simplu
Din relaţia (2.7) rezultă că, inductanţa L a bobinei variază după o hiperbolă. Dacă domeniul de măsurare este redus 0)15,01,0( δδ ⋅÷=∆ , unde δ0 = (0,4 ÷ 0,6) mm este întrefierul iniţial,
se obţine o liniaritate acceptabilă de (0,1 ÷ 0,5) % a inductanţei în funcţie de lungimea întrefierului (fig. 2.3 b). Bobina traductorului se alimentează cu un curent sinusoidal de intensitate i. Curentul din bobină generează un flux variabil, iar conform legii inducţiei electromagnetice tensiunea de la bornele bobinei este funcţie de distanţa întrefierului δ0 (se neglijează rezistenţa bobinei):
ττ d
id
R
N
d
idLu
m
⋅=⋅=2
(2.9)

15
Pentru a mări domeniul de măsurare, traductorul este prevăzut cu două circuite magnetice cu bobinele conectate în mod diferenţial (sensuri de înfăşurare diferite), numit traductor inductiv diferenţial (fig. 2.4 a). Partea mobilă, armătura, este plasată între două corpuri feromagnetice fixe. Bobinele traductorului cu inductanţa L1 şi L2 variabile, se conectează la o punte de măsurare Wheatstone de curent alternativ. Caracteristica traductorului are o porţiune cvasiliniară, domeniul de măsurare se măreşte, 0)4,03,0( δδ ⋅÷=∆ . Puntea este în echilibru,
când armătura se găseşte în partea centrală. La o deplasare într-un sens sau altul a armăturii puntea se dezechilibrează, iar valoarea tensiunii ue variază în funcţie de deplasarea ∆δ (fig. 2.4 b).
L
δ 0
b)a)
0
Ljug
i
~
armatura
δ
δ
∆δ=(0,3−0,4) δ 0
u
~ue
0
L 1
L 3
2L
4L
0δδ 0
Figura 2.4. Traductor inductiv diferenţial
Traductorul magnetostrictiv este un alt tip de traductor inductiv bazat pe efectul magnetostrictiv invers, numit şi efect Villari . Dacă un circuit magnetic este supus la acţiunea unei forţe, în corpurile feromagnetice (confecţionate din nichel, aliaje nichel-aluminiu, aliaje nichel-fier, etc.) se produc tensiuni mecanice, care modifică permeabilitatea magnetică a acestora. În mod corespunzător, se modifică inductanţa bobinei de la circuitul magnetic, iar tensiunea indusă variază în funcţie de valoarea forţei (fig. 7.3 c).
Traductorul inductiv cu miez mobil este un alt tip de traductor inductiv. Pentru a îmbunătăţii liniaritatea, traductorul se confecţionează din două bobine identice conectate în mod diferenţial (sensuri de înfăşurare diferite). Miezul se deplasează în interiorul bobinelor, modificând valoarea inducţiei (fig. 2.5 a). Inducţia totală L este în funcţie de poziţia x a miezului. Cele două bobine ale traductorului cu inductanţa L1 şi L2 variabile, se conectează într-un circuit electric alternativ de tip punte Wheatstone. De o parte şi de alta a poziţiei

16
centrale a miezului, caracteristica traductorului este aproximativ liniară. Domeniul de măsurare al aparatului este cuprins în porţiunea liniară a caracteristici, şi are o valoare mare,
mmx )00015,0( ÷=∆ (fig. 2.5 b).
∆ x
xc
x
x
a
ba
b c
x
a)
L = L - L
~u
~ue
0
1
L 3
2
4L
b)
Figura 2.5. Traductor inductiv cu miez mobil
Traductoarele capacitive. Traductoarele capacitive, sunt prevăzute cu un element sensibil format dintr-un condensator electric. Condensatorul electric este format din doi conductori numiţi armături, separaţi printr-un dielectric, care are capacitatea de a acumula o anumită cantitate de electricitate. După forma armăturilor, condensatoarele electrice se clasifică în: condensatoare plane; condensatoare cilindrice; şi condensatoare sferice. La construcţia traductoarelor se folosesc condensatoare electrice plane şi condensatoare electrice cilindrice.
Condensatorul electric plan este format din armături plane, dispuse paralel la distanţa δ mult mai mică decât dimensiunile armăturilor (fig. 2.6 a).
Capacitate electrică C se determină cu următoarea relaţie:
][FA
C c
δε ⋅
= (2.10)
unde: ε este permeabilitatea dielectricului, în F/m; Ac este aria armăturii, în m2; δ este grosimea dielectricului, în m.
Condensatorul electric cilindric este format din armături cilindrice dispuse coaxial, cu diametrele D > d şi lungimea l (fig. 2.6 b).

17
Capacitate electrică C se determină cu următoarea relaţie:
][ln
2F
d
Dl
C⋅⋅⋅= επ
(2.11)
Prin acţiunea mărimii de măsurat asupra elementului sensibil (condensator), se modifică în mod corespunzător parametrul (capacitatea electrică) acestuia. Mărimea măsurată este o deplasare, dacă se modifică poziţia relativă a armăturilor sau a dielectricului. Dacă dielectricul este hidroscopic, atunci capacitatea condensatorului se modifică în funcţie de umiditatea mediului; se obţine un traductor numit umidometru capacitiv.
a) b)
δ
a
d
armatura
l
b
D
dielectri
c
dielectric
Figura 2.6. Condensatori electrici
La traductoarele cu condensator plan există mai multe posibilităţi de modificare a capacităţii electrice în funcţie de poziţia relativă a armăturilor sau a dielectricului.
În funcţie de distanţa 0≠δ , caracteristica este o hiperbolă, δεδ cAC ⋅= 0)( unde: ε0 este
permeabilitatea aerului (ε0 = 8,85 ⋅ 10-12 F/m), (fig. 2.7 a). Pentru a obţine o caracteristică aproximativ liniară, elementul sensibil este format din doi condensatori, legaţi în mod diferenţial, armătura mobilă este cea centrală, δδεδ ⋅⋅≅−= )()( 2
0021 cACCC , (fig. 2.7 b).
În funcţie de poziţia x a armăturii, ],0[ ax∈ , caracteristica este liniară, )1()( 0 axCxC −⋅=
unde: C0 este capacitate maximă, δε cAC ⋅=0 ; a este lungimea armăturii, (fig. 2.7 c). Iar în
funcţie de poziţia x a dielectricului ],0[ ax∈ , caracteristica este de asemenea liniară,
axCCCxC a ⋅−−= )()( 00 unde: Ca este capacitate minimă, δε ca AC ⋅= 0 , (fig. 2.7 d).
La traductoarele cu condensator cilindric se poate modifica numai poziţia x a armăturii sau dielectricului. Caracteristicile sunt similare cu cele de la traductoarele cu condensator plan, ( a se substituie cu l ).
Traductoarele capacitive se folosesc la măsurarea deplasărilor foarte mici, la măsurarea vibraţiilor produse de undele sonore, a zgomotelor, etc.

18
Traductoarele fotoelectrice. Traductoarele fotoelectrice sunt prevăzute cu un element fotoelectric, numit şi fotosenzor, care sub acţiunea energiei radiante se modifică conductibilitatea electrică a acestora (efect fotoelectric intern). Senzorul se confecţionează din materiale speciale, numite materiale fotoemisive semiconductoare sau fotoconductoare. La aceste materiale, ultimul nivel energetic în care se găsesc electronii, numit nivel de valenţă, este despărţit de nivelele de conducţie printr-un nivel energetic (mai mic de 3⋅e V), numit zonă interzisă. Dacă energia radiantă este suficient de mare, electronii din nivelul de valenţă sunt trecuţi prin zona interzisă în nivele de conducţie, conductibilitatea electrică a semiconductorului creşte.
Principalele elemente fotosensibile folosite la construcţia traductoarelor parametrice sunt: celula fotoelectrică cu vid sau cu gaz; fotomultiplicatorul; fotodioda; fototranzitorul; şi fotorezistenţa.
δ 0δ 0δ
x a x
a
δ δ
ε 0 0ε 0ε
0εε ε
C1 C2
a)
δC
C C C C
x xa a
0
0 0C
Ca
C2
C1
0δ
δ
δ
b) c) d)
δ δ
Figura 2.7. Traductoare cu condensator plan
Celula fotoelectrică cu vid sau gaz este formată dintr-un tub de sticlă cu vid înaintat sau gaz rarefiat, şi doi electrozi, catodul şi anodul (fig. 2.8 a). Catodul are formă cilindrică cu suprafaţa interioară acoperită cu material fotosensibil, Cs. Anodul este sub formă de bară plasată pe axa catodului. Între anod şi catod există o diferenţă de potenţial. În general, la celulele cu vid diferenţa de potenţial este circa 250 V, iar la celulele cu gaz de circa 90 V. Sub acţiunea fluxului radiant FR, materialul fotosensibil de pe catod emite fotoni, care sub acţiune câmpului electric sunt deplasaţi şi captaţi de anod. Intensitatea curentului electric format între catod şi anod, depinde proprietăţile materialului fotosensibil şi de transparenţa spectrală a sticlei din care este confecţionat tubul.
Intensitatea curentului din celulele cu vid au o caracteristică perfect liniară, dar cu o variaţie mică. La celulele cu gaz, datorită ionizării gazului, intensitatea curentul (10 µA/lm) este cu 5 ÷ 10 ori mai mare decât a curentului de la celulele cu vid, dar caracteristica este neliniară.

19
Fotomultiplicatorul este formată dintr-un tub de sticlă vidat, iar în interior lui se află catodul C, anodul A şi un număr finit ( 5 ÷ 14 ) de electrozi suplimentari numiţi dinode D (fig. 2.8 b). Între două dinode alăturate există aceiaşi diferenţă de potenţial 100 ÷ 150 V, asigurată de un divizor de tensiune. Sub acţiunea fluxului radiant FR asupra materialului fotosensibil, catodul emite fotoelectroni, care sunt focalizaţi şi acceleraţi de câmpurile electrice produse de diferenţele de potenţial dintre dinode. Fluxul de fotoelectroni este amplificat datorită emisiilor suplimentare produse prin ciocnirea fotoelectronilor de dinode. Emisia suplimentare de electroni se amplifică după o progresie geometrică de la un dinod la altul, rezultând în final un factor de amplificare a curentului fotoelectric de până la 106, în funcţie de numărul dinodelor pe care le are elementului fotosensibil. În felul acesta, fotomultiplicatorul devine sensibil şi la intensităţi luminoase foarte reduse, şi nu necesită o amplificare specială a semnalului electric. Dinodii sunt confecţionaţi din aliaje argint-magneziu sau beriliu-cupru. Catodul este confecţionat din material fotosensibil, Cs-Sb, BiO-Ag-Cs, AgO-CsO-Cs, Sb-Na-K, etc.
fotoconductor
Φ
Reprezentare simbolica
- +
a) celula fotoelectrica b) fotomultiplicator
lentila
c) fotodioda
- +
(FR)
catod anod
(FR)C
A
D
Figura 2.8. Traductori fotoelectrici Fotodioda are proprietatea de creştere a conductibilităţii electrice în funcţie de intensitatea fluxului radiant Φi [lm]. Este formată dintr-o carcasă prevăzută în partea superioară cu o lentilă. În carcasă se găseşte un suport ceramic pe care este aplicat fotoconductorul. Legătura fotoconductorului cu circuitul electric se face prin doi conectori metalici (fig. 2.8 c). Altă soluţie constructivă este încapsularea materialului fotosensibil într-un material plastic transparent. Cele mai utilizate materiale fotosensibile folosite la confecţionarea fotodiodelor sunt: seleniul, sulfura de cadmiu, germaniul, siliciul, etc.

20
Intensitatea curentului electric ce trece prin fotodiodă variază liniar în funcţie de intensitatea radiaţiei luminoase. Datorită acestei proprietăţi, fotodiodele se pot folosi şi la măsurarea intensităţii luminoase.
Fototranzitorul se poate confecţiona din plăcuţe semiconductoare din germaniu sau siliciu. Radiaţia luminoasă acţionează asupra joncţiunea bază-colector, producând fenomenul de fotoconducţie. Sensibilitate fototranzitorului creşte de 100 ÷ 500 ori faţă de cea a fotodiodei, datorită amplificării semnalului, dar acesta variază neliniar cu intensitatea fluxului radiant.
Fotorezistenţa este formată din material fotosensibil (sulfură de cadmiu, selenură de cadmiu), care îşi modifică rezistenţa electrică la acţiunea radiaţiei luminoase. Rezistenţa electrică a fotorezistenţei scade la creşterea intensităţii luminoase. Dezavantajul acestui fotosenzor este timpul de răspuns relativ mare (aprox. 10 µs pentru fotorezistenţe din CdSe, şi 100 µs din CdS).
2.2.2 Traductoare generatoare
Traductoarele generatoare sunt prevăzute cu un element sensibil, care transformă o parte foarte mică din energia mediului supus investigării, în energie electrică. Energia absorbită de la mediului supus investigării de către traductor trebuie să fie cât mai mică, pentru a produce o influenţa neglijabilă asupra lui. În general, traductoarele generatoare pentru aparatele de măsurat au puteri foarte mici, ( 10-6 ÷ 10-10 ) W.
La baza funcţionării acestor traductoare stau următoarele fenomene fizice: inducţia electromagnetică, efectul piezoelectric, efectul termoelectric, efectul fotoelectric, etc. Se clasifică în funcţie de fenomenul sau efectul fizic care stă la baza funcţionării lor, în: traductoare electromagnetice, traductoare piezoelectrice, traductoare termoelectrice, traductoare fotoelectrice, etc.
Traductoarele electromagnetice. Traductoarele electromagnetice au la baza funcţionării, fenomenul inducţiei electromagnetice. Dacă un circuit electric este străbătut de un flux magnetic variabil Φi, la bornele lui apare o tensiune electromotoare, egală cu viteza de scădere a fluxului, τddu iΦ−= . Sistemul care produce fluxul magnetic (iniţial), se
numeşte inductor, iar fluxul produs se numeşte flux magnetic inductor Φi . Sistemul format din circuitul în care se induce tensiunea electromotoare, se numeşte indus, iar fluxul creat de acesta, se numeşte flux magnetic de reacţie Φr . Dacă indusul este format dintr-o bobină cu N spire, tensiunea electromotoare indusă este, τddNu iΦ⋅−= .
Dacă inductorul produce un câmp constant de inductanţă B (magnet permanent, electromagnet), în bobina indusului apare tensiune electromotoare numai dacă între inductor şi indus există mişcare relativă. Tensiunea este direct proporţională cu viteză relativă w :
wku ⋅= , unde k depinde de parametri bobinei şi inducţia câmpului magnetic produs de inductor (fig. 2.9).
Dacă inductorul este format dintr-o bobină prin care circulă curent alternativ, câmpul magnetic produs este variabil. În acest caz, în indus se induce tensiune electromotoare chiar şi atunci când viteza relativă este nulă (transformator electric).
Avantajul principal al traductoarelor electromagnetice este faptul că, semnalul produs nu trebuie amplificat.

21
Traductoarele piezoelectrice. Traductoarele piezoelectrice funcţionează pe baza efectului piezoelectric. Efectul constă în proprietatea unor materiale dielectrice cristaline (cuarţ, sulfat de litiu) de a produce sarcinii electrice la suprafaţa lor, atunci când sunt supuse la deformaţii mecanice (efect piezoelectric direct). Dacă materialul piezoelectric se află într-un câmp electric variabil, atunci se modifică dimensiunile lui (efect piezoelectric invers).
i
N
S
N
S
S
N
S
Nw w w w
i i i
Figura 2.8. Inducţie electromagnetică Dintre materialele cu proprietăţi piezoelectrice cel mai folosit este cuarţul. Cuarţul cristalizează în sistem hexagonal (fig. 2.9 a). Celula elementară a cuarţului este definită de axele polare numite şi axe piezoelectrice. Axele x-x determinate de muchiile opuse se numesc axe electrice, axele y-y perpendiculare pe feţele opuse se numesc axe mecanice, iar axa z-z perpendiculară pe baze se numeşte axă optică. Tensiunea de polarizare a sarcinilor electrice depinde de mărimea şi direcţia solicitărilor mecanice asupra cristalului. Dacă solicitarea se face după direcţiile axelor electrice x-x tensiunea de polarizare este maximă, se produce efect piezoelectric longitudinal, iar dacă solicitarea se face după direcţiile axelor mecanice y-y se produce efect piezoelectric transversal. După direcţia axei optice z-z efectul piezoelectric nu se produce.
Traductorul piezoelectric este format dintr-o plăcuţă piezoelectrică Ppz montată între două armături metalice Ar (fig. 2.9 b). Plăcuţa piezoelectrică se obţine prin secţionarea cristalului (de cuarţ) sub forma a unui paralelipiped cu feţele perpendiculare pe axele piezoelectrice. Din punct de vedere electric traductorul reprezintă un condensator electric plan, plăcuţa piezoelectrică reprezintă dielectricul. Diferenţa de potenţial electric de tensiune U este direct proporţional cu presiunea p ce acţionează asupra plăcuţelor piezoelectrice:
pgkU p ⋅⋅= (2.12)
unde: g este grosimea plăcuţei piezoelectrice, în m; p este presiunea de comprimare, în Pa; kp este coeficientul de sensibilitate electrică, pentru cuarţ kp = 0,055 V⋅s2/kg . Pentru a mări tensiunea electrică U, traductoarele piezoelectrice se confecţionează din pachete de plăcuţe legate în serie. Dacă se măsoară depresiunea, plăcutele se montează pretensionat. Semnalul emis de traductor trebuie amplificat şi protejat de câmpuri parazite. Ele au frecvenţe proprii foarte ridicate (50 ÷ 150) kHz, care le permite măsurarea de presiuni sau forţe variabile în funcţie de timp cu frecvenţe foarte mari, de până la 15 kHz.

22
Traductoarele termoelectrice. Traductoarele termoelectrice numite şi termocupluri, funcţionează pe baza efectului de termocuplu, numit şi efect Seebeck. Dacă la conexiunile formate la capetele a doi conductori, confecţionaţi din metale diferite, există o diferenţă de temperatură, atunci în conductori apare o tensiune electromotoare, numită tensiune termoelectromotoare, se notează prescurtat t.t.e.m.
Termocuplul este format din doi conductori sub formă de fire sau benzi, confecţionaţi din metale diferite, sudaţi sau lipiţi la capete. Unul din capăt sudat sau lipit, care se găseşte în contact cu mediul a cărei temperatură Tm se măsoară, se numeşte joncţiune de măsurare. Celălalt capăt, numit joncţiune de referinţă se găseşte într-un mediu cu temperatura Tr cunoscută şi mai mică decât temperatura de măsurare (fig. 2.10 a). Tensiunea termoelectromotoare U care apare între joncţiuni, depinde de natura metalelor din care sunt confecţionaţi conductorii, şi diferenţa de temperatură ∆T = Tm – Tr .
a) b)
Ppz
Ppz
x
y z
x
y
z g
- -- - -- - -- - -- - -- - -- - -- Ug
pfm
fmp
Ar
Figura 2.9. Efect piezoelectric
Perechea de metale din care se confecţionează conductorii termocuplului trebuie să producă o tensiune electromotoare cât mai mare, cu o variaţie cât mai liniară şi la o pantă cât mai mare (sensibilitate mărită). De asemenea, conductorii trebuie să reziste la acţiunea termică şi chimică a mediului cu care vin în contact. În general, elementul sensibil se protejează prin introducerea lui într-o teacă confecţionată din oţel inoxidabil şi refractar, sau din material ceramic. Pentru a reduce constantă de timp (întârzierea de răspuns) a traductorului, diametrul conductorilor se reduc la minimul, sau se renunţă la teaca de protecţie. Metalele folosite la confecţionarea termocuplului sunt: cupru-constantan pentru un domeniu de măsurare (-200 ÷ 400) 0C; fier-constantan pentru un domeniu de măsurare (-200÷600) 0C; cromel-constantan pentru un domeniu de măsurare (0 ÷ 800) 0C; platin-rhodiu pentru un domeniu de măsurare (0 ÷ 1300) 0C; etc.
Temperatura de referinţă Tr, trebuie menţinută constantă în timpul măsurării. Ea se menţine constantă la 0 0C, 20 0C, sau la 50 0C, prin introducerea joncţiunii de referinţă într-un

23
termostat. Dacă joncţiunea nu este introdusă în termostat, atunci rezultatul măsurării este supus unei corecţii în funcţie de temperatura mediului de la locul unde se efectuează măsurarea.
a) b)
U
T m
T r
T m T m1 T m2 T m3
rT rT
U = n . U = UT UT
c)
Figura 2.10. Efect termoelectric
Pentru a mări intensitatea semnalului de măsurare, elementul sensibil al traductorului poate fi format dintr-o baterie de termocupluri, numită termopilă, legate în serie, UT = n ⋅ U (fig. 2.10 b) sau în paralel, UT = U (fig. 2.10 c), unde: n este numărul de termocupluri din baterie. Termopila cu legăturile în paralel, cu termocuplurile dispuse în puncte cu temperaturi diferite
321 mmm TTT ≠≠ , indică temperatura medie a mediului măsurat: 3)( 321 mmmm TTTT ++= .
Tensiunea termoelectromotoare se măsoară cu un milivoltmetru, cu cadranul gradat direct în 0C sau K . Aparatul de măsurare se dispune suficient de departe de punctul de măsurare, unde temperatura mediului măsurat rămâne constantă. Cablul electric de legătură are în general conductoarele confecţionate din acelaşi material cu al elementului sensibil, cu excepţia, când elementul sensibil este confecţionat din metale rare.
Traductoarele fotoelectrice. Traductoarele fotoelectrice sunt prevăzute cu un element fotoelectric, care converteşte energia luminoasă în energie electrică. Energia luminoasă este o formă de energie electromagnetică radiantă. În general, radiaţia luminoasă este emisă de corpuri în stare de incandescenţă sau prin fenomenul de luminescenţă, şi are lungimea de undă cuprinsă între (0,4 ÷ 0,76) µm (spectrul vizibil). Unitatea de măsură a intensităţii luminoase este candela, notată cu cd, iar a fluxului luminos este lumenul, notat cu lm.

24
Transformarea radiaţiei luminoase în semnal electric de măsurare se face pe baza efectului fotoelectric extern. Efectul fotoelectric extern constă în emisia de electroni din corpurile solide sub acţiunea luminii (energie radiantă). Electronii emişi se numesc fotoelectroni, iar corpurile se numesc materiale fotosensibile. Energia radiantă ν⋅h necesară extracţiei unui electron, este dată de relaţia lui Einstein, determinată pe baza teoriei cuantelor de lumină, numite fotoni:
0
2
2L
wmh +⋅=⋅ν (2.13)
unde: h este constanta lui Plank, h = 6,63 ⋅ 10-34 J/s ; ν este frecvenţa undei luminoase, în Hz; 22wm⋅ este energia cinetică iniţială a fotoelectronilor, în J; L0 este lucrul mecanic de
extracţie a fotoelectronilor, în J.
Dacă energia radiantă este egală cu lucrul mecanic de extracţie, energia cinetică a fotoelectronului este nulă, electronul se găseşte pe nivelul cel mai periferic al atomului, numit nivel Fermi, se obţine frecvenţa minimă a undei luminoase de la care se produce efectul fotoelectric, hL00 =ν , care îi corespunde o lungimea de undă maximă, 00 νλ c= , unde: c
este viteza luminii, în m/s .
Celula fotovoltaică. Celula fotovoltaică este principalul element fotosensibile folosit la construcţia traductoarelor generatoare. Ea funcţionează pe baza efectului voltaic, care converteşte energia luminoasă direct în energie electrică. La unele materiale fotosensibile poate să apară tensiune electromotoare între două zone, dacă una din zone este iluminată iar cealaltă rămâne neiluminată. Pentru confecţionarea celulelor fotovoltaice se folosesc materiale semiconductoare, siliciul, seleniul, şi germaniul. Cele mai răspândite sunt celulele cu siliciu. Sub acţiunea luminii în celulă se generează un câmp electric intern, care antrenează purtătorii de sarcină produşi de acţiunea fotonilor sub forma unui curent electric. Tensiunea maximă a unui circuit electric deschis produs de o celulă, este de aproximativ 0,5 V. Pentru creşterea tensiunii electrice, celulele se leagă în serie, iar pentru creşterea intensităţii curentului electric, celulele se leagă în paralel.

25
C3. Elementele componente ale aparatelor de măsurat
3.1. Noţiuni generale
Aparatele de măsurare determină valoarea mărimii măsurate prin compararea ei cu o mărime de referinţă numită etalon. În timpul măsurării, etalonul produce un semnal de sens contrar faţă de cel produs de elementul sensibil al aparatului de măsură. Semnalele produse de elementul sensibil şi etalon acţionează asupra dispozitivului indicator. Atunci când valoarea absolută a celor două semnale este egală, partea mobilă a dispozitivului indicator este în stare de echilibru. În acesta stare, valoarea mărimii măsurate este egală cu valoarea semnalului emis de etalon. Dacă starea de echilibru se produce prin devierea părţii mobile a dispozitivului indicator, principiul de funcţionare a aparatului de măsurat este prin deviaţie, iar dacă starea de echilibru se produce fără devierea părţii mobile a dispozitivului indicator, principiul de funcţionare a aparatului de măsurat este prin comparaţie. La aparatele de măsurare prin deviaţie, valoarea semnalului produs de etalon este stabilită la construcţia aparatului printr-o operaţie numită calibrare sau etalonare, şi este prezentată sub forma unei scări gradate. Mărimea măsurată este citită de pe scara gradată în dreptul diviziunii unde s-a oprit acul indicator. La aparatele de măsurare prin comparaţie, valoarea semnalului produs de etalon se poate varia din exteriorul aparatului până la anularea efectului produs de semnalul elementului sensibil. Varierea semnalului produs de etalon se poate face în mod manual sau automat. Valoarea mărimii măsurate este dată de valoarea semnalului produs de etalon atunci când mărimea acestuia anulează efectul produs de captor (deviaţia acului de la dispozitivul indicator este nulă).
În funcţie de modul de determinare a valorii măsurate, aparatele de măsură se clasifică în: aparate cu determinare directă, şi aparate cu determinare indirectă.
Aparatele cu determinare directă sunt prevăzute cu un singur senzor, iar valoarea mărimii măsurate este indicată direct de dispozitivul indicator.
Aparatele cu determinare indirectă se folosesc la măsurarea mărimilor fizice care nu se pot determina direct sau măsurarea se poate face prin procedee neavantajoase. În acest caz, prin măsurare directă se determină mărimile de care depinde mărimea de măsurat consecinţă a unei legi fizice, iar prin aplicarea relaţiei de legătură rezultă valoarea mărimii. De exemplu, pentru determinarea puterii mecanice dată de relaţia MnkP ⋅⋅= , se determină prin măsurare directă turaţia n şi momentul M ( k este coeficient de proporţionalitate ). Prin aplicarea acestei relaţii se obţine valoarea puterii. Pentru determinarea în mod direct a acestor mărimi, aparatele de măsurare sunt formate din două sau mai multe elemente sensibile şi un bloc de calcul.
În funcţie de tipul elementului sensibil, aparatele de măsurare se clasifică în: aparate de măsurare cu captor, şi aparate de măsurare cu traductor.
3.2. Aparate de măsurare cu captor
Aparatul de măsurare cu captor, este format în general din element sensibil (captorul), etalonul, mecanism de transmitere şi amplificare a semnalului (sub formă de mişcare mecanică), şi dispozitivul indicator. În general mecanismul de transmitere şi amplificare este

26
cu bare articulate sau cu angrenaje. Dispozitivul indicator poate fi, cu scară gradată şi ac indicator, înregistrator sub formă de valori numerice, şi înregistrator sub formă grafică, care reprezintă grafic funcţia dintre două mărimi măsurate.
În figura 3.1 a este prezentată schema de funcţionare a aparatului de măsurat cu scară gradată şi ac indicator. Semnalul metrologic S sub formă de mişcare de translaţie este transmis prin mecanismul amplificator la acul indicator 2a. Mecanismul amplificator este format din barele articulate 1a şi 1b, şi angrenajul cu roţi dinţate 1c şi 1d. Acul indicator este deviat până în punctul unde acţiunea semnalului produs de captor este echilibrată de acţiunea arcului 3. Arcului 3 reprezintă etalonul aparatului de măsură. Valoarea mărimii măsurată este dată de diviziunea din dreptul acului indicator. Pentru a evitata eroarea de paralaxă (apare atunci când raza vizuală nu este perpendiculară pe panul scării gradate) la citirea rezultatului măsurării, cadranul 2b este prevăzut cu oglinda 2c. Citirea valorii măsurate este corectă atunci când acul indicator se suprapune peste imaginea lui din oglindă.
a) c)
b)
cadran
01
2 3 4 56
S
1a
1b
1d
2a
1c
2c 2b
2a
1
2
3
0
3
2
1
0
3
2
1
0
0
0
0
2
4
13
56
p
hw
d t
6
2
5 4
13
3
Figura 3.1. Aparate de măsură cu captor
Înregistratorul mecanic sub formă de valori numerice este format dintr-un sistem cinematic care transformă mişcarea de rotaţie, într-o mişcare intermitentă (semnal discret). Sistemul cinematic cuprinde mai multe perechi de elemente cu raportul de transmitere egal cu 10. Din punct de vedere constructiv sistemul poate fi: cu roţii dinţate, cu discuri şi bolţuri, cu mecanism cruce de Malta, etc. În figura 3.1 b este prezentată schema înregistratorului mecanic cu mecanisme cruce de Malta. Înregistratorul este format din două axe fixe, pe care se montează mai multe perechi de elemente cinematice (egale cu numărul de cifre a valorii mărimii măsurate). O pereche de elemente cinematice este formată din, roţile dinţate 1 şi 2 cu

27
angrenare permanentă, elementul conducător (braţul cu ştift) 3 şi elementul condus (rotiţa cu 10 crestături) 4 ale mecanismului cruce de Malta, şi rola 5 pe care sunt imprimate cifre de la 0 la 9. Semnalul de măsurare sub formă de mişcare de rotaţie este preluat de roata 6. De la roata 6 mişcarea de rotaţie se transmite la prima pereche de elemente cinematice. Rola acestei perechi indică unităţile sau ultima cifră a zecimalelor de la valoarea numerică a mărimii măsurate. În continuare, mişcare se transmite intermitent la următoarea pereche de elemente cinematice, care execută 0,1 rotaţii la o rotaţie a perechii anterioare.
În figura 3.1 c este prezentată schema de funcţionare a aparatului de măsurat cu înregistrator sub formă grafică, numit indicator de presiune mecanic, folosit la trasarea diagramei indicate de la motoarele sau compresoarele cu piston, cu turaţia maximă (300 ÷ 400) rot/min.
Captorul aparatului este format din pistonul 1, care este racordat la cilindrul motor. Presiunea gazului din cilindru pune în mişcare pistonul, care este transmisă la pârghia cu peniţă 4 prin intermediul unui mecanism amplificator cu bare articulate 3 şi 4. Forţa de presiune a gazelor asupra pistonului este echilibrată de forţa elastică a arcului (etalonul) 2. Dacă caracteristica arcului este liniară, atunci valoarea presiunii p a gazului din cilindrul motor este direct proporţională cu deplasarea peniţei. Pentru a obţine diagrama de variaţie a presiunii în funcţie de volumul V al camerei motoare, hârtia fixată pe transportorul cu bandă, prevăzut cu tamburul de antrenare 5 şi tamburul de întindere 6, primeşte o mişcare de translaţie cu viteză constantă Vknidw mtmth ⋅=⋅⋅⋅= π , unde: dt este diametrul tamburului de antrenare, în m; i tm
este raportul de transmisie dintre tambur şi arborele motor, mttm nni = ; nt este turaţia
tamburului, în rot/min; nm este turaţia arborelui cotit al motorului, în rot/min; k este factor de proporţionalitate; V este volumul camerei motoare, în m3.
Se observă, în cazul aparatului cu înregistrare sub formă de diagramă se măsoară două mărimi (presiunea şi volumul), iar rezultatul măsurării este graficul funcţiei dintre aceste mărimi.
3.2. Aparate de măsurare cu traductor
Aparatul de măsurare cu traductor, este format din următoarele elemente: senzor (traductorul); modul cu circuite electronice; şi dispozitiv indicator. Elementele aparatului sunt conectate într-un circuit electric, numit circuit de măsurare. Circuitul de măsurare poate fi: circuit simplu; circuit cu divizor de tensiune; sau circuit în punte.
Modul cu circuite electronice. Modul cu circuite electronice are rolul de a prelucra şi transmite semnalului metrologic, care în general este format din următoarele elemente: amplificator electronic; filtre electronice; convertoare electronice; sursă de curent; etc.
Amplificatorul electronic este un element al circuitului de măsurare care amplifică şi prelucrează semnalul de măsurare. Sunt de mai multe tipuri: amplificatoare de curent alternativ pentru amplificarea semnalelor rapid variabile; amplificatoare de curent continuu pentru amplificarea semnalelor statice sau lent variabile; şi amplificatoare operaţionale pentru efectuarea pe cale electrică a unor operaţii matematice pentru prelucrarea semnalului.
Filtrele electronice proprietatea de a lăsa să treacă prin ele numai anumite porţiuni ale spectrului de frecvenţă al semnalului metrologic. Ele sunt de mai multe tipuri: filtru trece jos; filtru trece sus; filtru de bandă; şi filtru rejecţie de bandă.
Convertoare electronice realizează conversia semnalului de măsurare sub formă electrică. Convertorul analog - digital (CAD) transformă semnalul electric cu variaţie continuă în semnal electric cu variaţie discontinuă (trenuri de impulsuri electrice), pentru a obţine un

28
semnal de măsurare sub formă digitală, iar convertorul digital - analog (CDA) transformă semnalul electric cu variaţie discontinuă în semnal electric cu variaţie continuă, pentru a obţine un semnal de măsurare sub formă analogică.
Transmiterea semnalului de măsurare se face prin conductori electrici numiţi cabluri de conexiune. Pentru a evita distorsionarea lui de către câmpurile exterioare de natură electrostatică sau electromagnetică, cablurile se blindează. Cablul blindat, numit cablu coaxial (fig. 3.2 a), este format dintr-un conductor central izolat electric 1 încunjurat de un blindaj 2 confecţionat din plasă de cupru sau aluminiu. Partea exterioară reprezintă învelişul protector 3. Datorită acestei construcţii, cablul coaxial din punct de vedere electric reprezintă un condensator cilindric, a cărei capacitate creşte cu lungimea lui.
Dispozitivul indicator. Dispozitivul indicator poate fi, cu sistem de afişare sau cu sistem de înregistrare, a datelor măsurate. La dispozitivul indicator cu afişare valoarea mărimii măsurate este vizualizată numai în timpul când traductorul emite semnal, iar la dispozitivul indicator cu înregistrare, datele de măsurare sunt accesibile şi după dispariţia semnalului.
Dispozitivului indicator cu sistem de afişare realizează afişarea valorii mărimii măsurate prin două metode: cu deviaţie; sau cu afişare cu ecran.
Dispozitivul de afişare cu deviaţie se compune din: cadran; indicator; şi sistem de deviere. Pe cadran este marcată scara gradată, denumirea, sau iniţiala unităţii de măsură a mărimii măsurate, un număr care reprezintă clasa de precizie, etc. Indicatorul poate fi, cu ac, sau cu spot luminos. Acul indicator se execută din aliaj metalic (duraluminiu), şi este fixat pe axul sistemului de deviere. Indicatorul cu spot luminos este format dintr-o oglindă foarte mică fixată pe axul sistemului de deviere, şi o sursă de lumină. Raza de lumină de lumină este reflectată de oglindă pe scara gradată (transparentă) sub forma unui spot luminos.
Sistemul de deviere a acului, sau a spotului luminos, este format din: motor; dispozitiv de producere a cuplului rezistent (etalonul); dispozitiv de amortizare şi echilibrare; şi dispozitiv de corecţie. Motorul transformă semnalul electric emis de traductor, în mişcare de rotaţie (moment activ) la axul sistemului. Axul împreună cu acul sau oglinda, este rotit cu un anumit unghi, până când momentul activ produs de motor este echilibrat de momentul rezistent. Valoarea mărimii măsurate este dată de numărul de diviziuni peste care a fost deviat acul sau spotul luminos.
La majoritatea sistemelor de deviere, dispozitivul de producere a cuplului rezistent este format din unul sau două arcuri spirale, fixate pe ax. Axul este prevăzut la capete cu pivoţi din oţel cu duritate foarte mare, care se sprijină în lagăre din pietre dure (agat, rubin, corund), cu suprafaţa activă bine şlefuită pentru a reduce la minimul frecările. Dispozitivul de amortizare are rolul de a amortiza oscilaţiile produse de forţele de inerţie. Se folosesc dispozitive de amortizare de tip pneumatic sau magnetic. Echilibrarea forţelor centrifugale şi de inerţie a părţilor mobile se face prin contragreutăţi, plasate de obicei în partea opusă a acului indicator.
Dispozitivul de afişare cu deviaţie folosit la aparatele de măsură cu traductor, se numeşte voltmetru analogic, deoarece are o construcţie identică cu aparatul de măsurat tensiuni de curent continuu (fig. 3.2 b). Motorul sistemului de deviere este format dintr-un magnet permanent, prevăzut cu piesele polare 1a, între care se poate roti bobina 1b. Pentru creşterea şi uniformizarea câmpului magnetic din întrefier, între piesele polare este fixat miezul cilindric 1c, confecţionat din material feromagnetic. Bobina mobilă 1b este confecţionată din sârmă subţire de cupru sau aluminiu. Sârma bobinei se înfăşoară pe un cadru dreptunghiular din aluminiu. La confecţionarea unor bobine se renunţă la cadru, rigiditatea este asigurată de lacul (vopseaua) cu care se impregnează bobina. Cadrul bobinei se sprijină în lagărele 2b din

29
pietre dure, prin intermediul semiaxelor 2a. Pe una din semiaxe este fixat acul indicator 3a, prin intermediul căruia se poate citi valoarea măsurată. Pentru a evitata eroarea de paralaxă (apare atunci când raza vizuală nu este perpendiculară pe panul scării gradate) la citirea rezultatului măsurării, cadranul 3b este prevăzut cu oglinda 3c. Citirea valorii mărimii măsurate este corectă atunci când acul indicator se suprapune peste imaginea lui din oglindă. Partea mobilă a voltmetrului este echilibrată de contragreutăţile 3d, amplasate în partea opusă a acului indicator.
U0
3a
1a
1b
1c
2a
2b
N S
3d
4a
4b
3c
i
a) b)
cadran
01
2 3 4 56
3b
3a
1
2
3
Figura 3.2. Dispozitiv de afişare cu deviaţie
Arcul spiral (etalonul) 3d dezvoltă momentul rezistent, α⋅= rr kM , unde: kr este rigiditatea
arcului; α este unghiul de rotire a axului. Un capăt al arcului se fixează prin dispozitivul de corecţie 4b, format dintr-o furcă şi un ax cu excentric. Dispozitivul are rolul de a aduce acul indicator la diviziunea zero, atunci când, la semnal nul acesta nu este în dreptul acestei diviziuni.
Pentru a creşte sensibilitatea aparatului, semiaxele, lagărele şi arcurile, pot fi înlocuite cu o bandă elastică. Se elimină frecările în lagăre, iar prin torsionarea benzii se dezvoltă momentul rezistent.

30
Funcţionarea voltmetrului se bazează pe interacţiunea dintre câmpul magnetic produs de magnetul permanent şi cel produs de bobină. Bobina este străbătută de semnalul de măsurare de intensitate i. Datorită interacţiunii câmpurilor magnetice, asupra bobinei acţionează momentul activ, ikM aa ⋅= , unde: ka este constantă, care depinde de intensitatea câmpului
magnetic şi parametri constructivi ai bobinei. Acul indicator este rotit cu unghiul α, până când momentul activ este echilibrat de momentul rezistent:
ik
kMM
r
ara ⋅=⇒= α (3.1)
Unghiul de deviere α este direct proporţional cu intensitatea semnalului de măsurare, care trece prin bobina aparatului.
Dacă semnalul electric emis de traductor variază în timp, şi este trecut printr-o punte redresoare, atunci aparatul indică valoarea medie a mărimii măsurate, iar dacă semnalul este trecut printr-o punte redresoare legată în paralel cu un condensator, atunci aparatul indică valoarea maximă.
Dispozitivul de afişare cu ecran realizează afişarea mărimii măsurate sub formă numerică sau sub formă de grafic. Cele mai răspândite dispozitive de afişare cu ecran sunt voltmetrul numeric şi osciloscopul. Ecranul voltmetrului numeric este prevăzut cu mai multe căsuţe de afişaj cu cristale lichide sau cu diode luminiscente. Mărimea măsurată este afişată prin scrierea în fiecare căsuţă a unei cifre. Ecranul osciloscopului conţine un strat de material care devine fluorescent la impactul cu un fascicol de electroni. În felul acesta, se realizează vizualizarea pe ecran a variaţiei mărimii măsurate în funcţie de timp.
Voltmetru numeric este prevăzut cu un circuit electronic de conversie a semnalului analogic în semnal digital (convertor analog - digital (CAD)). Circuitul converteşte semnalul de tensiune în semnal de frecvenţă variabilă, proporţional cu tensiunea aplicată. Impulsurile produse sunt totalizate pe o durată de timp riguros constantă, şi afişează rezultatul sub formă numerică.
În fiecare căsuţă de afişaj a ecranului sunt prevăzute şapte elemente sub formă de segmente 1, ordonate sub formă de opt stilizat (fig. 3. a). Elementele căsuţei, numite celule se pot realiza cu cristale lichide sau cu diode luminiscente alimentate prin conductorii 2. Afişajul cu cristale lichide se numeşte LCD (Liguid Crystal Display), iar cel cu diode luminiscente se numeşte LED (Light Emittind Diodes).
Cristale lichide sunt grupări de molecule transparente sub formă de bară sau plate cu axele longitudinale paralele. Sub acţiunea unui câmp electric cristale se rotesc până când axele longitudinale devin paralele cu direcţia câmpului, iar lumina care trece prin celulă este absorbită în totalitate de polarizator (celula se înnegreşte). Celula se compune din două plăcuţe din sticlă 3, dispuse paralel la o distanţă de aproximativ 10 µm (fig. 3.3 b). Pe suprafeţele interioare ale plăcuţelor de sticlă sunt lipiţi electrozi 2 sub formă de plăci subţire, realizaţi din material transparent (dioxid de staniu, etc.). Cristale lichide 1 sunt dispuse între electrozi. Pe suprafeţele exterioare ale plăcuţelor de sticlă sunt dispuse filtrele de polarizare 4. În partea inferioară a celulei este prevăzută oglinda 5. Dacă între electrozi apare o diferenţă de potenţial, cristale se rotesc pe direcţia câmpului electric, iar lumina este absorbită de filtre, celula se înnegreşte. De exemplu, dacă celulele verticale din partea dreaptă sunt sub acţiunea câmpul electric produs de semnalul de măsurare, în căsuţă se afişează cifra 1. Afişajul colorat se obţine cu ajutorul filtrelor de culoare.

31
Dioda luminiscentă este un semiconductor, care emite fotoni (lumină) la parcurgerea curentului electric pe direcţia de conducţie. Acesta transformare de energie, se numeşte electroluminiscenţă. Când semiconductorul 1 este conectat la un circuit electric prin contactele 2, acesta emite lumină. Culoarea luminii emise depinde de materialul din care este confecţionat semiconductorul (de ex. fosforarseniu de galiu GaAsP, emite lumină portocaliu spre roşu. Pentru a mări contrastul faţă de mediu, peste semiconductor se toarnă răşina 3 de culoarea luminii emise de LED , iar forma diodei luminiscentă este dată de forma celulei din căsuţa de afişaj (fig. 3.3 c).
1 2
5
2
3
4
1
3
c)a) b)
1
2
Figura 3.3. Dispozitiv de afişare numerică
Osciloscopul numit şi tub catodic, vizualizează variaţia mărimii măsurate printr-un spot luminos produs de un fascicol de electroni. Aparatul este format dintru-un tub de sticlă cu interiorul vidat, mai mulţi electrozi şi un ecran fluorescent (fig. 3.4 a). Electrozii osciloscopului sunt, catodul C, grila de control Gc, anodul de focalizare Af , şi anodul de accelerare Aa. Ei formează tunul electronic, iar ansamblul alcătuit din plăcile de deflexie, pe orizontală Pdx şi pe verticală Pdy, formează sistemul de deflexie a fascicolul de electroni. Ecranul E este acoperit în interior cu un strat de substanţă fluorescentă (sulfură de zinc, anumiţi oxizi metalici, etc.), care în contactul cu fascicolul de electroni produce un spot luminos. Partea interioară a pereţilor laterali ai ecranului, sunt acoperiţi cu un înveliş metalic sau cu un strat de grafit Si, pentru scurgerea electronilor (descărcare electrostatică). Pe ecran sunt marcate două scări cu diviziuni, pe verticală şi pe orizontală, pe care se poate vizualiza variaţia unei mărimi în funcţie de altă mărime.
Tunul electronic produce un fascicol foarte subţire de electroni acceleraţi. Catodul C de forma unui disc, este acoperit cu o substanţă, care la încălzire produce o puternică emisie de electroni (bariu, etc.). El este încălzit (la o temperatură ridicată) de filamentul de încălzire Fi. Filamentul şi catodul sunt montaţi în tubul de protecţie Tp. Reglarea fluxului de electroni se face cu grila de control Gc. Ea este prevăzută cu o fantă centrală f, prin care trece fluxul de electroni. La un flux mai mare, creşte luminozitatea spotului. Valoarea fluxului depinde de diferenţa de potenţial din grilă, care se reglează cu un potenţiometru, numit potenţiometru de luminozitate. Electroni emişi de catod sunt focalizaţi şi acceleraţi de anozii Af şi Aa, sub

32
forma unui fascicol foarte subţire. Anodul de focalizare Af este de formă cilindrică prevăzut cu fanta f1. Liniile câmpului electric produs de anod formează o lentilă de focalizare, care concentrează electroni într-un fascicol foarte subţire. Gradul de concentrare depinde de diferenţa de potenţial, care se reglează cu un potenţiometru, numit potenţiometru de focalizare. Accelerarea electronilor din fascicol este realizată de anodul de accelerare Aa. Acceleraţia depinde de diferenţa de potenţial, care în general nu se poate regla.
a)
Spot luminos
Tun electronic Sis. de deflectie Ecran
Tp Gc C Af Pdx Pdy Si EAa
b)
Udx
T 2 T 3 T τ
f f1
Fi
Fascicol de electroni
,
Figura 3.4. Osciloscopul
Energia de impact a fasciculului de electroni cu ecranul se transformă în lumină numai într-o mică parte (10 %), restul se transformă în căldură, care poate degrada ecranul dacă durata de impact (viteză mică de deplasare a spotului) sau luminozitatea sunt mari. Pentru a preveni acest fenomen, la viteze mici de deplasare a spotului se reduce luminozitatea.
Deplasarea spotului luminos pe ecran se face prin devierea fluxului de electroni de câmpurile electrice produse de plăcile de deflexie. Dacă se vizualizează variaţia unei mărimi în funcţie de alta mărime, atunci plăcile de deflexie sunt alimentate de semnalele celor două mărimi. Fiecare semnal este trecut printr-un atenuator şi un amplificator. Prin intermediul atenuatorului se selectează scara de reprezentare pe verticală y sau pe orizontală x, în mV/diviziune.
Semnalele trebuie amplificate, deoarece pentru o deflexie normală este necesar să se aplice plăcilor o tensiune de ordinul sutelor de volţi. Dacă se vizualizează variaţia în funcţie de timp a mărimi măsurate, atunci plăcile de deflexie pe verticală se alimentează cu semnalul mărimii

33
măsurate, iar plăcile de deflexie pe orizontală se alimentează de un semnal dinte de ferăstrău, produs de un dispozitiv numit generator de baleiaj (fig. 3.4 b). Tensiunea Udx a plăcilor de deflexie pe orizontală, variază liniar cu timpul (spotul are viteză constantă). Variaţia este periodică cu perioada T, şi reprezintă timpul în care spotul luminos parcurge ecranul de stânga la dreapta. Perioada se reglează încât pe ecran să se obţină o imagine clară şi staţionară. Viteza spotului luminos pe orizontală trebuie să fie suficient de mare încât să poată urmări variaţia semnalului măsurat. Reglarea spotului luminos pe orizontală se numeşte sincronizare.
Imaginea de pe ecran se poate înregistra prin fotografiere. Fotografierea se poate realiza cu un aparat obişnuit sau cu ajutorul unui aparat special, care permite deplasarea filmului fotografic cu viteză constantă prin faţa ecranului. În acest caz, spotul luminos este deplasat numai pe verticală.
O construcţie specială de osciloscop este osciloscopul cu remanenţă. Acesta aparat permite reţinerea imaginii pe ecran pe o perioadă limitată de timp.
Dispozitivului indicator cu sistem înregistrator, numite şi aparat înregistrator, sunt destinate pentru înregistrarea mărimilor măsurate variabile. După modul cum se realizează înregistrarea, aparate înregistratoare sunt de două feluri: înregistratoare grafice; şi înregistratoare magnetice.
Înregistratoare grafice, realizează înregistrarea mărimilor variabile sub formă de diagrame în funcţie de timp sau în funcţie de altă mărime măsurată. Înregistrarea se poate face pe hârtie sau pe suport fotosensibil.
Înregistratoarele grafice pe hârtie trasează diagrama de variaţie printr-o linie continuă sau printr-o linie punctată. Trasarea diagramei cu linie continuă se poate face cu peniţă sau prin metode speciale. Peniţa este sub forma unui tub capilar confecţionat din sticlă sau din metal dur, alimentată cu cerneală de la un rezervor. Grosimea liniei variază între (0,1 ÷ 0,6) mm. Hârtia trebuie să fie cât mai netedă, pentru a se reduce coeficientul de frecare, dar trebuie să asigure şi absorbirea cât mai repede a cerneli. Cerneala trebuie să se usuce rapid pe hârtie şi să-şi păstreze fluiditatea în rezervor.
Datorită frecării peniţei cu hârtia performanţele dinamice ale aparatelor sunt limitate. Pentru a îmbunătăţi aceste performanţe se folosesc metode speciale fără contact cu hârtia, de exemplu prin efect termic sau arc electric. Trasarea prin efect termic se face pe hârtie termosensibilă, obţinută prin acoperirea ei cu un preparat chimic special. Peniţa este înlocuită cu un ac metalic încălzit electric. Prin deplasare fără contact pe suprafaţa hârtiei în dreptul acului se produce schimbarea culorii, imprimând pe hârtie o urmă sub formă de linie. Trasarea prin arc electric se face pe hârtie metalizată, obţinută prin acoperirea ei cu un strat subţire de cadmiu-zinc. Peniţa este înlocuită cu un electrod din wolfram. Electrodul şi hârtia sunt conectate la o sursă de curent continuu (electrodul la borna pozitivă) de (30 ÷ 50) V. Prin deplasare fără contact a electrodului pe suprafaţa hârtiei, arcul electric evaporează pelicula de metal din dreptul lui imprimând pe hârtie o urmă sub formă de linie.
Trasarea diagramei printr-o linie punctată se face cu ajutorul unui ac, cu mişcare oscilatorie. Între ac şi hârtie este interpusă o panglică impregnată cu tuş. Acul apasă panglica pe hârtie cu o anumită frecvenţă. La fiecare apăsare pe hârtie se imprimă un punct poziţionat în funcţie de valoarea mărimii măsurate. Acest procedeu are următorul avantaj, acul se află în contact cu hârtia numai în momentul apăsării panglici. Pentru a contura cât mai bine curba de variaţie, frecvenţa apăsărilor trebuie să fie suficient de mare.
În figura 3.5 a este prezentat un înregistrator pe hârtie cu peniţă. Semnalul mărimii măsurate este amplificat şi transmis la servomotorul 1, care prin intermediul transmisiei 2 acţionează

34
dispozitivul port peniţă 3. Dispozitivul port peniţă are o mişcare rectilinie-alternativă pe direcţia f y, iar hârtia are o mişcare rectilinie cu viteză constantă pe direcţia x. Mişcarea hârtia este asigurată de dispozitivul 4. Acţionarea dispozitivului se face cu motoare sincrone sau pas cu pas. Pentru modificarea vitezei de avans a hârtiei între motor şi tamburul de antrenare se interpune un variator de turaţie. La aparatele moderne, variaţia vitezei se face electronic prin modificarea frecvenţei curentului electric de alimentare. În funcţie de viteza de variaţie a mărimii măsurate se adoptă o anumită viteză de antrenare a hârtiei, încât să se obţină un grafic uşor de interpretat şi o utilizare raţională a hârtiei.
a)
n=ct.
4
1
n=ct.
x
y
x
y
4
3 2 1
b)
5 6
2
2a 3
Figura 3.5. Înregistratoare grafice
Înregistratoarele grafice pe hârtie pot înregistra mărimi variabile sub formă de diagramă, cu o bandă de frecvenţă de până la 150 Hz, în funcţie de particularităţile constructive şi caracteristicile dinamice ale aparatului.
Înregistratoarele grafice pe suport fotosensibil, numite şi oscilografe magnetice înregistrează diagrama de variaţie a mărimii măsurate în funcţie de timp sau de altă mărime, pe peliculă fotografică sau pe hârtie fotosensibilă.
Oscilograful magnetic este format dintr-un milivoltmetru electronic cu spot luminos, care printr-un sistem optic spotul este proiectat pe pelicula fotografică sau pe hârtia fotosensibilă (fig. 2.5b). Cadrul bobinat 2 al milivoltmetrului este suspendat prin intermediul a două benzi elastice 2a, care realizează momentul rezistent prin torsionarea lor. În felul acesta, se elimină frecările din lagăre şi arcurile pentru producerea momentului rezistent. Pe una din benzile elastice se fixează oglinda 4, care reflectă lumina produsă de sursa 3, prin intermediul sistemului optic 5 pe suportul fotosensibil 6. Sub acţiunea semnalului de intrare cadrul

35
bobinat are o mişcare de rotaţie oscilatorie, iar spotul luminos de pe suportul fotosensibil, are o mişcare oscilatorie pe direcţie transversală (la unghiuri mici de oscilaţie se poate considera mişcare rectilinie-alternativă). Prin combinarea acestei mişcări, cu mişcare rectilinie a suportul fotosensibil, se obţine diagrama de variaţie în funcţie de timp. Antrenarea dispozitivului de mişcare a suportului fotosensibil se face tot cu motoare sincrone, de curent continuu, sau pas cu pas. Cu ajutorul unui dispozitiv special, care funcţionează pe principiul blitz-ului din tehnica fotografică, se poate trasa pe suportul fotosensibil linii transversale, care marchează timpul.
La oscilografele magnetice moderne, suportul sensibil este o hârtie specială (hârtie fotosensibilă), care sub acţiunea unui spot de raze ultraviolete (produse de lămpi cu mercur) se impresionează fără developare. Diagrama apare imediat, în aproximativ (10 ÷ 20) s după impresionare.
Oscilografele magnetice pot înregistra variaţia mărimilor măsurate sub formă de diagrame, cu o bandă de frecvenţă de până la 5000 Hz.
Înregistratoare magnetice, realizează înregistrarea mărimii măsurate pe un mediu magnetic aplicat pe un suport sub formă de bandă sau disc. Ele se clasifică după forma suportului pe care este aplicat mediul magnetic în înregistratoare cu bandă şi în înregistratoare cu disc.
Înregistratorul cu bandă, numit şi magnetograf sau magnetofon de măsurare este format din, banda magnetică (BM) , capului de înregistrare (CÎ) , capul de redare (CR), şi capul de ştergere (C'S) (fig. 3.6 a). În timpul funcţionării banda (BM) se deplasează cu viteză constantă prin faţa capului (CÎ) , a capul (CR), şi a capul (C'S). mişcarea este asigurată de rolele de acţionare (RA), numite cabestan. Rolele sunt acţionată de motoare asincrone reglate electronic sau de un motoare sincrone cu înfăşurare de pornire.
i
BM
ue
i
u i
2c
1a
1b
2b
2a
c)
wb
D Ar CSC
w
n
u
A
R1
RG
b)
M
Gf
D
Ai
R2
CS CI CR RP RA
a)
Figura 3.6. Înregistratoare magnetice
Banda este apăsată pe cabestan de rola de presare (RP), şi este rulată-derulată pe rolele (R1) şi (R2) numite platan, prin intermediul a mai multor role de ghidare (RG). Turaţia rolelor (R1) şi (R2) este continuu variabilă. Acţionarea lor este asigurată de motoare de curent

36
continuu, sau de motoare de curent alternativ şi variatoare de turaţie. În timpul rulării, prin intermediul capului de înregistrare, semnalul de măsurare este memorat de banda magnetică. Redarea semnalului se face de capul de redare prin derularea benzii magnetice. Variaţia lui poate fi vizualizat cu ajutorul unui osciloscop sau tipărită cu un înregistrator grafic.
Banda magnetică este formată din suportul (1a) confecţionat din material plastic (poliester sau PVC), cu grosimea de 12 ÷ 40 µm, peste care se aplică mediul magnetic (1b) (cu remanenţă mare) format din oxid de fier şi liant sub forma unui strat de grosime 5 ÷ 10 µm (fig. 3.6 b). Pelicula feromagnetică este constituită din particule sub formă de ac, de lungime 0,6 µm şi diametru 0,1 µm, cu axele longitudinale paralele cu direcţia de deplasare a benzii. Lăţimea benzii este de 12,7 mm (1/2’), sau 25,4 mm (1’) la magnetografe cu role, şi 3,81 mm la magnetografe cu casete, iar grosimea de 0,0254 mm.
Capul de înregistrare este format dintr-o armătură circulară (2a) confecţionată din material feromagnetic, prevăzută cu un întrefier nemagnetic (2b), de aproximativ 3 µm (aproximativ de două ori grosimea stratului feromagnetic de pe bandă) cu permeabilitate mică (fig. 3.6 b). Contactul dintre bandă şi capul de înregistrare se face în dreptul întreferului. Pe armătura capului de înregistrare este înfăşurată bobina (2c) conectată la semnalul de intrare de tensiune
iu . Acesta produce un câmpul magnetic, numit câmpului de magnetizare care se închide prin
stratul feromagnetic de pe bandă, deoarece permeabilitatea magnetică a întrefierului este foarte mică. Prin deplasarea benzii cu viteza bω constantă se produce magnetizarea
permanentă a stratului feromagnetic. Câmpul magnetic permanent al benzii are o variaţie identică cu a câmpului de magnetizare, semnalul de măsurare a fost memorat.
Redarea semnalului memorat se face cu ajutorul capului de redare. Capul de redare are o construcţie identică cu a capului de înregistrare. Pentru redare, banda magnetică se deplasează cu viteza bω prin dreptul întrefierului. Deoarece permeabilitatea magnetică a întrefierului este
foarte mică fluxul magnetic al benzii se închide prin armătura capului de redare. În bobină se induce un curent electric, care variază proporţional cu semnalul de intrare. Dacă fluxul magnetic al benzii magnetice are o variaţie sinusoidală ωτsin⋅=Φ A , atunci tensiunea electromagnetică indusă în bobina, este:
ωτωτ
cos⋅⋅⋅=Φ⋅= ANd
dNue (3.1)
unde: N este numărul de spire a bobinei de pe armătură.
Din relaţia (3.1) rezultă, semnalul redat reprezintă derivata semnalului înregistrat. Pentru acest motiv, semnalul de măsurare redat este trecut printr-un amplificator operaţional echipat cu dispozitiv de integrare.
Magnetografele se pot fi cu înregistrare directă sau cu modulaţie de frecvenţă. Magnetografele cu înregistrare directă au o construcţie asemănătoare cu a magnetofonului obişnuit (folosit la înregistrare-redare audio), dar erorile de înregistrare sunt mari, depăşesc 5 %. Magnetografele cu modulaţie de frecvenţă au erorile de înregistrare sunt sub 1 %, dar banda de frecvenţă a semnalului este mai redusă decât a magnetografele cu înregistrare directă. La acestea magnetografe, semnalul de intrare este trecut prin modulatorul (M) şi amplificatorul (A), înainte de înregistrare. Modulatorul (M) are rolul de a transforma semnalul analogic în semnal digital. Semnalul de redare este trecut prin amplificatorul integrator (AI) şi demodulatorul (D) (fig. 3.6 a).Capul de ştergere (C'S) are o construcţie

37
identică cu a capului de înregistrare, dar întrefierul are valoare mai mare (0,1 ÷ 0,3) mm. La ştergere bobina capului este alimentată cu curent sinusoidal de înaltă frecvenţă şi amplitudine constantă, produs de generatorul de frecvenţă (Gf) (fig. 3.6 a). Banda magnetică este prevăzută cu mai multe piste de înregistrare-redare (maxim 14). Pistele sunt separate prin zone neutre, pentru a se evita influenţa pistelor alăturate (efectul de diafonie). Viteza benzii magnetice se poate regla în trepte, ea depinde de frecvenţa maximă a semnalului care poate fi înregistrat. Accesul la informaţiile înregistrate este secvenţial, prin mişcare continuă (derularea) a benzii magnetice. Pentru a realiza o înregistrare bună viteza, grosimea stratului feromagnetic, şi suportul benzii magnetice, trebuie realizate în limite de toleranţe foarte strânse, iar contactul cu capul de înregistrare trebuie să fie bun. De asemenea, pentru un anumit domeniu de frecvenţă trebuie folosită tipul de bandă magnetică recomandat.
Înregistratoarele cu disc sunt întâlnite la calculatoarele electronice, numite şi hard-disc. Hard-discul este format dintr-un arbore vertical (Ar) , pe care se dispun mai multe discuri (D) (fig. 3.6 c). Discurile sunt acoperite cu un strat magnetic din aliaj cobalt-nichel. În timpul funcţionării arborele discurilor primeşte o mişcare de rotaţie, iar capetele de scriere-citire (CSC) o mişcare radială. Informaţiile sunt memorate pe piste concentrice, iar accesul la date este aleator, prin deplasarea capetelor de scriere-citire în zona de memorare. Semnalul de măsurare este trecut printr-un modulator şi memorat sub formă digitală. Datele înregistrate se pot prelucra cu ajutorul unor programe speciale, afişa pe monitor, sau imprima pe hârtie, sub formă de grafic sau tabel.
Înregistratoarele magnetice se pot folosi la înregistrarea mărimilor măsurate variabile, cu banda de frecvenţă cuprinsă între (25 ÷ 10 000) Hz.

38
C4. Parametri generali ai aparatelor de măsurare
Aparatul de măsură reprezintă un sistem automat care stabileşte o legătură bine determinată între semnalul de intrare ix şi semnalul de ieşire ex . Semnalul de intrare reprezintă mărimea
măsurată şi este produsă de interacţiunea dintre captor şi mediul supus măsurării, iar semnalul de ieşire reprezintă mărimea perceptibilă produsă de dispozitivul indicator (fig. 4.1. a). Funcţia de legătură dintre mărimile de intrare-ieşire )( ie xfx = , se numeşte caracteristica
ideală a aparatului de măsură. În condiţii reale aparatul de măsură se află şi sub influenţa unor mărimi perturbatorii. Aceste mărimi produc un semnal perturbator px , care influenţează
valoarea semnalului de ieşire. Funcţia de legătură ),( pie xxfx = , se numeşte caracteristica
reală a aparatului de măsură (fig. 4.1. b). Mărimile perturbatorii sunt de natură internă (frecări în lagăre, curenţii paraziţi, etc.) şi de natură externă (factorii de mediu presiune, temperatură, umiditate, câmpuri electrice sau magnetice externe, etc.).
Datorită semnalului perturbator la care este supus aparatul în timpul măsurării, valoarea reală a mărimii măsurate se poate determina numai în limitele unei erori de măsurare. Eroarea de măsurare reprezintă diferenţa între valoarea determinată la măsurare numită valoare măsurată mx şi valoarea reală 0x , 0xxx ma −=∆ , numită şi eroare absolută.
Deoarece valoarea reală a mărimii măsurate nu se poate determina (din cauza factorilor perturbatorii), rezultă că şi eroarea absolută rămâne nedeterminată. Domeniul erorilor de măsurare se poate estima cu o anumită probabilitate prin metode statistice.
a)
x i x e
b)
x p
ix
x e
x e x i= f ( )A1
B1
A 2
B2
A
B
xemin
x imin x imax
xemax
∆x
emax
x e
c)
x i
∆x
e
Figura 4.1. Caracteristica aparatelor de măsură
Aparatele se concep în aşa fel încât mărimile perturbatoare să producă abateri minime, în limitele unei erori tolerate de la caracteristica ideală. Principale metode pentru reducerea sau anularea semnalelor perturbatoare sunt: metoda insensibilizării captorului faţă de semnalele perturbatoare; metoda semnalelor opuse, constă în introducerea de semnale cu semn opus şi de aceiaşi natură faţă de semnalele perturbatoare cu scopul anulării lor; metoda filtrării selective care constă în introducere în construcţia captorului a unor elemente numite filtre, care reţin sau blochează semnalele perturbatoare.

39
Caracteristica aparatului de măsurare se determină în regim de funcţionare static şi dinamic. Aparatul de măsură este în regim static atunci când mărimea de ieşire nu variază în funcţie de timp. Regimul static reprezintă o stare de echilibru a funcţionării aparatului. Trecerea la o nouă stare de echilibru se face printr-un regim de funcţionare dinamic, numit şi regim de funcţionare tranzitoriu. La acest regim mărime de ieşire variază şi în funcţie de timp.
4.1 Caracteristica statică
Caracteristica statică se stabileşte în cazurile când mărimea măsurată variază suficient de lent faţă de viteza de răspuns a aparatului. Ea se determină prin aplicarea legii fizice care stă la baza funcţionării captorului sau prin metode experimentale. Stabilirea finală a caracteristicii se face experimental printr-o operaţie numită etalonare. La etalonare se obţine legătura între mărimea de intrare şi ieşire sub forma unei curbe, numită curbă de etalonare.
Domeniul de măsurare trebuie să cuprindă variaţia mărimii măsurate, iar erorile de măsurare să nu depăşească limitele admise. Măsurarea unor mărimii cu valori peste limitele domeniului de măsurare se face în general cu erori peste limita admisă, iar peste o anumite limită se distruge aparatul. Pentru extinderea domeniului de măsurare, acesta se împarte în mai multe game sau subdomenii în aşa fel încât variaţia mărimii măsurate să se încadreze în limitele subdomeniului iar erorile de măsurare să nu depăşească limitele admise.
În general se preferă aparate de măsură cu caracteristică statică liniară. Rezultă o scară gradată cu diviziuni echidistante, există posibilitatea de analiză şi optimizare a semnalului de ieşire prin metode simple şi precise (aparate cu elemente liniare). Principalele metode de liniarizare a caracteristici statice sunt: alegerea domeniului de măsurare în zona unde neliniaritatea caracteristici este redusă; folosirea de dispozitive speciale pentru liniarizarea caracteristici. Diferenţa dintre caracteristica reală şi caracteristica liniară se numeşte abatere de la liniaritate sau eroare de neliniaritate. Abaterea de la liniaritate este dată de diferenţa maximă maxex∆ dintre abcisa caracteristici liniarizate AB şi abcisa uneia dintre dreptele A1B1
sau A2B2 (fig. 4.1. b). Dreptele A1B1 şi A2B2 sunt parale cu AB şi încadrează caracteristica reală. Eroarea relativă de la liniaritatea se apreciază prin raportul (în procente) dintre abaterea de la liniaritate şi domeniul de măsurare, [%]100)/( minmax ⋅−∆= eeel xxxε .
Eroarea de histerezis este diferenţa dintre curbele de etalonare ex∆ , care se produce prin
parcurgerea domeniului de măsurare în sens crescător şi în sens descrescător (fig. 4.1. c). Ea intervine datorită ireversibilităţii fenomenelor care intervin în funcţionare, frecările din elementele mecanice, etc.
La etalonarea aparatului de măsurare se determină şi alţi parametri: sensibilitatea, rezoluţia, pragul de mobilitate, fidelitatea, justeţea, şi precizia.
Sensibilitatea reprezintă variaţia mărimii de ieşire ex∆ în funcţie de variaţia mărimii de
intrare ix∆ . Ea este dată de derivata caracteristici statice:
ixxi
e
i
e
x
x
xd
xdS
=∆∆≅= (4.1)
Sensibilitatea este cu atât mai bună cu cât S este mai mică. Sensibilitatea este constantă la aparatele cu caracteristică liniară şi variază la aparatele cu caracteristică neliniară. Sensibilitate la aparatele cu caracteristică liniară se numeşte factor de amplificare dacă S > 1, sau factor de atenuare, dacă S < 1. Inversa sensibilităţii C = 1 / S se numeşte constanta

40
aparatului. La aparatele de măsură cu ac indicator, constanta aparatului reprezintă valoarea mărimii măsurate care produce devierea acului cu o diviziune.
Rezoluţia reprezintă variaţia minimă a valorii măsurate care poate fi sesizată de dispozitiv. În general, ea este dată de valoarea unei diviziuni la dispozitivele cu cadran, şi de cifra unu a ultimei zecimale la dispozitivele cu afişaj numeric. Valoarea cea mai mică pe care o poate măsura aparatul se numeşte prag de mobilitate sau prag de sensibilitate. Valoarea rezoluţiei şi a pragului de mobilitate depinde de perturbaţiile interne şi externe din circuitele electronice (numite zgomote), frecări şi jocuri din dispozitivele mecanice, etc.
Fidelitatea sau repetabilitatea reprezintă gradul de menţinere a valorii măsurate prin măsurări repetate la intervale mici sau mai mari de timp şi în condiţii neschimbate de măsurare. Cu cât dispersia valorilor de măsurate este mai mică cu atât fidelitatea aparatului este mai înaltă. Justeţea măsurării reprezintă gradul de apropiere a valorii măsurate, faţă de valoarea reală.
Parametrul general care caracterizează calitatea aparatelor de măsurare este precizia. Precizia reprezintă calitatea aparatului de a determina valoarea mărimii măsurate în limitele unei erori tolerate faţă de valoarea reală. Ea se evaluează printr-o mărime numită clasă de precizie. Clasa de precizie reprezintă raportul dintre eroarea ax∆ şi valoarea domeniul de măsurare, în
procente 100/ ⋅∆= na xxc . Valorile clasei de precizie sunt standardizate: 0,001; 0,002; 0,005;
0,01; 0,02; 0,05; 0,1; 0,2; 0,5; 1; 2; 5, şi este inscripţionată pe cadranul dispozitivul indicator al aparatului. De exemplu, un manometru cu domeniul de măsurare barxn 500= şi clasa de
precizie 01,0=c , realizează măsurarea cu eroarea maximă de barxa 550001,0 =⋅=∆ .
4.2 Caracteristica dinamică
Caracteristica dinamică reprezintă răspunsul aparatului la măsurarea unei mărimi variabilă în funcţie de timp. Pentru determinarea corectă a variaţiei mărimii măsurate, trebuie să se cunoască modul cum se comportă aparatul de măsurare în regim de funcţionare dinamic. Caracteristica dinamică se poate determina prin modelare matematică sau prin metode experimentale.
Modelarea matematică constă în determinarea ecuaţiei care exprimă dependenţa în timp a mărimii de ieşire ex faţă de mărimea de intrare ix . Ecuaţia rezultă prin prelucrarea sistemului
de ecuaţii format din relaţiile caracteristice (legile fizice care stau la baza funcţionării) şi de legătură (bilanţ de energie, bilanţ de masă), ale elementelor din care este format aparatul. În general, rezultă o ecuaţie diferenţială neliniară (coeficienţii sunt funcţie de timp). Prin metode analitice se pot soluţiona numai ecuaţii diferenţiale liniare (coeficienţi constanţi). Caracteristica poate fi determinată de o ecuaţie diferenţială liniară, dacă elementele aparatului se aproximează cu elemente ideale cu caracteristică liniară. Din punct de vedere energetic, aceste elemente sunt de două categorii: acumulatoare şi disipatoare de energie. Elementele acumulatoare pot fi, acumulatoare de energie cinetică numite elemente inerţiale (elemente mecanice cu masă sau elemente electrice cu bobină), sau acumulatoare de energie potenţială (elemente mecanice elastice sau elemente electrice cu condensator). Elementele disipatoare de energie pot fi, de natură mecanică (cu frecare mecanică sau vâscoasă, rezistenţe hidraulice sau pneumatice) sau de natură electrică (rezistenţe electrice). Soluţia generală a ecuaţiei diferenţială liniară este sub forma unei sume algebrice de doi termeni:
( ) ( ) ( )τττ esete xxx += (4.2)

41
Componenta ( )τetx defineşte răspunsul tranzitoriu iar componenta ( )τesx defineşte
răspunsul staţionar, al aparatului de măsurare. Răspunsul aparatului devine staţionar când componenta tranzitorie tinde către zero, ( ) 0→τetx .
Caracteristicile dinamice ale aparatelor de măsură se determină experimental prin aplicarea la intrare: a unui semnal cu variaţie în treaptă ( ) ii Ax =τ , .ctAi = ; sau a unui semnal cu variaţie
sinusoidală ( ) τωτ ⋅⋅= fii Ax sin , unde iA este amplitudinea; fω este pulsaţia; τ este timpul.
Caracteristica dinamică cu intrare în treaptă unitară ( ) 1=τix , se numeşte funcţie indicială
sau răspuns indicial. Componenta staţionară a caracteristicii dinamice de la aparatele cu elemente liniare are valoarea ( ) ies Akx ⋅=τ , unde k este factor de proporţionalitate. Răspunsul
dinamic a acestor aparate poate avea o evoluţie periodic-amortizat sau o evoluţie aperiodică (fig. 4.2. a, b).
σ
T x esxe
τc
τî ττr τm τ1 τs
0,95·xes
0,05·xes
xex es
ττsτî
x i
τ
x i
τ
A i A i
a) b)
Figura 4.2. Caracteristica dinamică cu intrare treaptă
Răspunsul periodic-amortizat este caracteristic aparatelor cu elemente de întârziere (cu inerţie) de ordinul II (caracteristica dinamică este dată de o ecuaţie diferenţială liniară de ordinul II) (fig. 4.2. a). Datorită inerţiei (de natură mecanică, termică sau electromagnetică), răspunsul apare cu întârzierea îτ , iar în continuare răspunsul creşte rapid. Durata de creştere
rapidă numită timp de creştere, reprezintă timpul necesar pentru creşterea răspunsului de la valoarea esx⋅0,05 la esx⋅0,95 , se notează cu cτ . Valoarea maximă cu care se depăşeşte
componenta staţionară esx se numeşte suprareglaj, se notează cu σ . În continuare răspunsul
oscilează în jurul valorii esx cu pulsaţia pω , numită pulsaţie proprie. Amplitudinea
oscilaţiilor se reduce progresiv, teoretic pentru ∞→τ , componenta tranzitorie se anulează

42
( ) 0=∞etx . Viteza de reducere progresivă în funcţie de timp a oscilaţiilor se evaluează prin
coeficientul de amortizareξ . După valoarea coeficientului de amortizare aparatele de măsurare se clasifică în: aparate subamortizate 1≤ξ (dacă 1=ξ se obţine aparat cu amortizare critică) şi aparate supraamortizate 1>ξ . Evoluţia răspunsului la aparatele de măsurare supraamortizate este aperiodică (fig. 4.2. b). şi aparatele de măsurare cu elemente de întârziere de ordinul I (caracteristica dinamică este dată de o ecuaţie liniară de gradul I) au tot o caracteristică aperiodică. Un alt parametru al aparatelor de măsurare subamortizate este pulsaţia naturală nω . Pulsaţia naturală reprezintă, pulsaţia caracteristicii în condiţiile în care
aparatul ar fi fără amortizare, 0=ξ .
Eroarea sau abaterea dinamică Dε , este definită de diferenţa între valoarea răspunsului şi
valoarea componentei statice, ( ) ( ) eseD xx −= ττε . Eroarea dinamică scade progresiv cu
timpul, pentru ∞→τ eroarea se anulează ( ) 0=∞Dε . Durata de scădere a erorii dinamice în
valoare absolută, sub o anumită valoare admisă adD x∆≤ε , se numeşte timp de stabilizare
sau timp de staţionare, se notează cu sτ . Eroarea dinamică admisă se alege,
esx0,05) ÷ (0,02= ⋅∆ adx pentru aparatele de măsurare pentru uz general şi esx0,0001= ⋅∆ adx
pentru aparatele de măsurare folosite în laborator.
Timpul de stabilizare sτ reprezintă măsura vitezei de răspuns a aparatului de măsurare; cu cât
sτ este mai mic cu atât aparatul este mai rapid. Valoarea timpului de stabilizare la aparatele
subamortizate depinde de coeficientul de amortizareξ şi pulsaţia naturală nω . Pentru
măsurări dinamice se aleg aparate cu coeficientul de amortizare 0,70 ÷ 0,60=ξ şi pulsaţia
proprie pω cât mai mare. Aparate de măsurare supraamortizate nu se folosesc la măsurări
dinamice, deoarece timpul de stabilizare este prea mare.
La aparatele de măsurare subamortizate se mai poate defini, timpul de răspuns rτ şi timpul
primului maxim mτ . Timpul de răspuns reprezintă durata necesară pentru creşterea
răspunsului dinamic până la valoarea componentei staţionare, iar timpul primului maxim reprezintă durata necesară pentru creşterea răspunsului dinamic până la valoarea maximă.
Cu ajutorul caracteristici dinamice obţinută experimental prin aplicarea unui semnal de intrare în treaptă, se pot determină următorii parametri dinamici (fig. 4.2. a); coeficientul de amortizare se determină cu relaţia:
22 πθθξ+
= (4.3)
unde: |))(||)(|(ln 11 τετεθ DD= este decrementul logaritmic al amortizării; ( )1τε D şi
( )mD τε sunt erorile dinamice de la două amplitudini succesive; pulsaţia proprie se determină
cu relaţia:
Tp
πω ⋅= 2 (4.4)
unde: T este perioada pulsaţiilor; pulsaţia naturală se determină cu relaţia:
21 ξ
ωω
−= p
n (4.5)

43
Caracteristica dinamică la intrare sinusoidală se numeşte răspuns frecvenţial şi este formată numai din componenta staţionară. Dacă asupra aparatului se aplică o mărime sinusoidală cu pulsaţia fω , după o durată de adaptare (trecerea în regim de funcţionare staţionar), răspunsul
este tot o mărime sinusoidală cu aceiaşi pulsaţie, cu amplitudine diferită, şi defazat faţă de semnalul de intrare. Aparatele de măsurare formate numai din elemente liniare, au răspunsul de forma: ( ) ( ) ( )ϕτωττ +⋅⋅== feese Axx sin , unde ϕ este unghiul de fază, numit şi întârziere
de fază, deoarece răspunsul rămâne pentru toate cazurile în urma semnalului metrologic 0<ϕ (fig. 4.3. a).
x i
Ae
A( )
0
dB
ωc
rϕϕc
−ϕ( )ϕϕ
−ϕ( )
r
c
0Α 0
ω f βr βc β
A ( )
b) c)A
r
6
-6
ωf ωf
ωfωf
0
T xes
xe
τî τ ω r
x i
Ai
a)
Figura 4.3. Caracteristica dinamică cu intrare sinusoidală
La aparatele de măsurare subamortizate, cu coeficientul 0,707<ξ , amplitudinea eA a
semnalului de ieşire trece printr-un maxim (răspunsul prezintă fenomenul de rezonanţă). Pulsaţia semnalului metrologic la care amplitudinea semnalul de ieşire este maximă (amplitudine de rezonanţă, se notează cu rA , se numeşte pulsaţie de rezonanţă, se notează cu
rω . Pentru pulsaţii mai mari decât pulsaţia de rezonanţă, amplitudinea semnalului de ieşire
scade. Pulsaţia la care amplitudinea eA scade sub o valoare admisă, se numeşte pulsaţie
critică, se notează cu cω . La aparatele cu coeficientul de amortizare 0,707≥ξ şi la aparatele
formate din elemente de ordinul I, amplitudinea semnalului de ieşire scade în mod continuu la creşterea pulsaţiei fω . Datorită întârzierii răspunsului cu timpul îτ , acesta se defazează faţă
de semnalul de măsurare cu unghiul de fază fîf ωτωϕ ⋅−=)( . La pulsaţia de rezonanţă
întârzierea de fază trece prin cvadratură, 2/πϕ −= Variaţia amplitudinii şi a întârzierii de
fază în funcţie de pulsaţia fω se numeşte caracteristică de frecvenţă. Caracteristica de frecvenţă reprezentată grafic se numeşte diagrama Bode. Diagrama Bode se poate reprezenta în coordonate liniare (fig. 4.3. b) sau în coordonate logaritmice (fig. 4.3. c). Coordonata de pe ordonata curbei de variaţie a amplitudinii din diagrama Bode în coordonate liniare este,
ifef AAA /)()( ωω = numit factorul de amplificare-atenuare sau raportul amplitudinilor.
Coordonatele curbei de variaţie a amplitudinii din diagrama Bode în coordonate logaritmice sunt: mărimea )(log20)( ffdB AA ωω ⋅= cu unitatea de măsură numită decibel, reprezentată
ordonata; şi mărimea )/log( pf ωωβ = (raportul pf ωω / scalat logaritmic), reprezentată

44
abscisa. Dacă raportul 2/ =pf ωω scalat logaritmic se dublează, pulsaţia a crescut cu o
octavă, iar dacă raportul 10/ =pf ωω scalat logaritmic se înzeceşte, pulsaţia a crescut cu o
decadă.
Un semnal metrologic cu o variaţie de formă oarecare poate fi descompus într-o serie Fourier de funcţii trigonometrice numite armonici. La măsurarea mărimilor variabile aparatele se comportă ca un filtru "trece-jos", lasă să treacă şi eventual amplifică armonicile cu pulsaţii joase, şi atenuează armonicile cu pulsaţii înalte, semnalul metrologic este distorsionat. Pentru a realiza o măsurare cât mai precisă, aparatul de măsurare trebuie să aibă o bandă de trecere cât mai largă, pentru a filtra un număr cât mai redus de armonici. Banda de trecere reprezintă domeniul admis al pulsaţiilor de la semnalul metrologic, care poate fi măsurat în limitele unei erori admise (distorsionarea se încadrează în limitele admise). Domeniul admis de pulsaţii al semnalului de intrare se defineşte prin pulsaţia maximă Bω . Pulsaţia semnalului metrologic
fω trebuie să varieze în banda de trecere a aparatului:
],0[ Bf ωω ∈ (4.6)
Parametri aparatele pentru măsurări dinamice au următoarele valori: coeficientul de amortizare 0,7 ÷ 0,6=ξ , şi banda de trecere p1,2) ÷ (1= ωω ⋅B . La aparatele cu pulsaţia
proprie foarte mare, se poate adopta un coeficient de amortizare mic 0,1)=(ξ Dacă eroarea relativă a răspunsului se limitează la % 2) ÷ (1 , atunci banda de trecere se limitează la trei
sau patru octave sub valoarea pulsaţiei proprii, 8/÷16/2/÷2/ 34B pppp ωωωωω =≤ .
Parametri dinamici ai aparatelor de măsurare digitale se definesc în funcţie de principiile de funcţionare a acestora. De exemplu, timpul de repetiţie rpτ al aparatele cu traductor
analogic, este dat de suma dintre timpul de stabilizare sτ a părţii analogice, şi timpul Nτ de
convertire a semnalului analogic şi de generare a codului de către CAN (convertizor analog numeric). Durată de convertire şi de generare a codului depinde de metoda aplicată şi de viteza de operare a circuitelor electronice. Timpul de repetiţie rpτ al aparatele cu traductor
numeric este dat numai de durata de generare a codului.
4.3 Parametri energetici
Transmiterea semnalului metrologic de la captor la dispozitivul indicator implică un consum de energie. În cazul mărimilor active, energia este preluată total sau parţial de la sistemul supus măsurării, iar în cazul mărimilor pasive de la sursa auxiliară. Influenţa de natură energetică a aparatului de măsură asupra mărimii (active) măsurate se numeşte efect de sarcină. Prin extragerea de energie din punctul de măsurare se produce modificarea mărimii măsurate în mod defavorabil, valoarea ei este determinată cu eroare numită eroare de interacţiune. Transferul de energie între sistemul supus măsurării şi aparatul de măsură poate fi caracterizat prin variabila măsurată şi o variabilă asociată. Una dintre variabile este de tip intensiv iar cealaltă este de tip extensiv. Se notează cu X valoarea adevărată şi cu Xm valoarea măsurată a variabilei de tip intensiv şi cu Y valoarea adevărată şi cu Ym valoarea măsurată a variabilei de tip extensiv. Produsul lor reprezintă putere în cazul sistemelor dinamice, sau lucrul mecanic în cazul sistemelor statice. Dacă energia este de tip electric raportul X / Y = Z se numeşte impedanţă generalizată, iar dacă energia este de tip mecanic raportul X / Y = Z se

45
numeşte rigiditate generalizată. Se notează cu Zs impedanţa (rigiditatea) sistemului supus măsurării şi cu Zm impedanţa (rigiditatea) aparatului de măsură. Dacă aparatul de măsură nu este conectat la sistem, impedanţa (rigiditatea) sistemului este dată de raportul Zs = X / Y (fig. 4.4. a), iar dacă aparatul de măsură este conectat la sistem, impedanţa (rigiditatea) sistemului este dată de raportul Zs = Xs / Ym (fig. 4.4. b).
a) b)
X s X X m
Z s
X
Z s Z mY Y Y m Y m Y m
Figura 4.4. Parametri energetici
Valoarea adevărată a mărimii de tip intensiv se determină cu următoarea relaţie: X = Xs + Xm = (Zs + Zm) · Ym, iar valoarea măsurată este dată de relaţia: Xm = Zm · Ym. Eroarea de măsurare (eroarea de interacţiune) este dată de relaţia: ∆X = Xm – X = –Zs / (Zs + Zm) · X.
Valoarea adevărată a mărimii de tip extensiv se determină cu următoarea relaţie: Y = X / Zs, iar valoarea măsurată este: Ym = x / (Zs + Zm). Eroarea de măsurare este dată de relaţia: ∆Y = Xm – X = – Zm / (Zs + Zm) · Y.
În concluzie, eroarea de interacţiune la măsurarea mărimilor intensive este mică dacă impedanţa (rigiditatea) aparatului de măsură este mult mai mare decât impedanţa (rigiditatea) sistemului supus măsurării, Zm >> Zs. La măsurarea mărimilor extensive impedanţa (rigiditatea) aparatului de măsură trebuie să fie mult mai mică decât impedanţa (rigiditatea) sistemului supus măsurării, Zm << Zs, pentru a obţine măsurări cu erori mici.
Puterea (lucrul mecanic) dezvoltat de aparatul de măsură se determină cu relaţia: P = X · Ym = X2 / (Zs + Zm), dacă Zm → ∞, P = 0, puterea aparatului de măsură este mică dacă impedanţa (rigiditatea) este mare.
Impedanţa (rigiditatea) reprezintă un parametru important al aparatelor de măsură. În funcţie valoarea şi de tipul mărimii măsurate (intensiv sau extensiv), aparatul trebuie să aibă o impedanţă (rigiditate) corespunzătore, pentru obţine măsurări cu erori în limitele admise şi consumuri mici de energie. Dacă valoarea mărimii măsurate este prea mare în raport impedanţa (rigiditatea) aparatului, între sistemul supus măsurării şi aparatul de măsură se intercalează un dispozitiv de reducere, numit adaptor de amplitudine sau adaptor de nivel. Adaptoarele de amplitudine sunt dispozitive pasive, care funcţionează fără consum de energie, produc reducerea erorii de măsurare şi a consumul de energie. Dacă valoarea mărimii măsurate este prea mică, între sistemul supus măsurării şi aparatul de măsură se intercalează un dispozitiv de amplificare, numit adaptor de putere. Adaptorul de putere de putere amplifică valoarea mărimii măsurate preluând energia necesară de la sursa auxiliară.
Pentru măsurare mărimilor pasive, aparatele de măsură sunt prevăzute cu sursă de energie. Pentru a realiza măsurări în limitele erorii admise şi cu consumuri reduse de energie, puterea aparatului de măsură se optimizează.

46
4.3 Parametri constructivi şi de exploatare
Principali parametri constructivi ai aparatelor de măsură sunt, robusteţea şi capacitatea de supraîncărcare. Robusteţea reprezintă calitatea aparatului de păstrare a preciziei de măsurare, în condiţiile în care parametri mediului înconjurător, a sursei de alimentare, etc., variază. Capacitatea de supraîncărcare reprezintă calitatea aparatului de a măsura mărimi peste limita superioară a domeniului de măsurare, cu erori în limitele admise, şi fără defectarea lui. Valoarea maximă a mărimii pe care o poate măsura aparatul cu eroarea în limitele admise, şi fără să se defecteze, se numeşte valoare maximă nedestructivă. Valoarea maximă pe care o poate măsura aparatul pe timp scurt, se numeşte valoare maximă nedestructivă la şoc, iar valoarea maximă pe timp mai lung se numeşte valoare maximă nedestructivă la suprasarcină.
Pentru a mări robusteţea şi capacitatea de supraîncărcare a aparatelor de măsurare se prevăd următoarele măsuri constructive: protecţie împotriva acţiunii mediului (climatică şi aticorosivă); carcase etanşe; suspensii elastice (protecţie împotriva vibraţiilor); ecranări electromagnetice; elemente de siguranţă (electrice şi termice, relee de decuplare, supape de suprapresiune), etc.
Principali parametri de exploatare ai aparatelor de măsură sunt, durata de funcţionare, fiabilitatea, şi reparabilitatea. Durata de funcţionare reprezintă timpul în care aparat îşi păstrează parametri în limitele admise. Fiabilitatea reprezintă timpul în care aparatul funcţionează fără defecţiuni, si erorile se încadrează în limitele admise. Reparabilitatea reprezintă calitatea aparatului de măsură de ai putea depista, preveni, şi înlătura defecţiunile.

47
C5. Aparate şi metode de măsurare. Metode de măsurare a parametrilor de stare
Metodele de măsurare reprezintă un ansamblu de principii şi mijloace folosite la măsurarea unei mărimi. După modul cum se obţine valoarea mărimii măsurate, măsurarea se poate fi: directă sau indirectă. Prin măsurarea directă, valoarea mărimii măsurate se obţine direct de la dispozitivul indicator, iar prin măsurarea indirectă, valoarea mărimii măsurate se determină prin calcul cu ajutorul unei relaţii funcţie de alte mărimi măsurate direct. De exemplu, masa unui gaz dintr-un recipient se poate determina prin aplicarea ecuaţiei de stare, dacă prin măsurare directă se determină volumul, presiunea şi temperatura, şi se cunoaşte constanta gazului. Metoda de măsurat trebuie să fie sigură, uşor de aplicat, şi să se obţină o precizie cât mai ridicată. 5.1. Metode de măsurare a parametrilor de stare
Parametri de stare a agentului motor sunt densitatea, presiunea şi temperatura. Presiunea şi temperatura se determină prin măsurare directă, iar densitatea se poate determina prin măsurare indirectă sau directă. Densitatea este o mărime pasivă, ea reprezintă proprietate de material. În general, valoarea densităţii de la diferite materiale sunt indicate în tabele (v. tab. tab101). Uneori în tabele se indică densitatea relativă. Densitatea relativă reprezintă raportul dintre densitatea fluidului considerat şi densitatea unui fluid de referinţă. Fluidul de referinţă pentru lichide este apa distilată iar pentru gaze este aerul, în condiţii normale (pentru apă:
PapCt NN 101325,4 =°= ; pentru aer: PapCt NN 101325,0 =°= ). Măsurarea directă a
densităţii se face cu aparate numite densimetre. Cele mai cunoscute sunt: densimetre cu tub flexibil, densimetre cu balanţă, densimetre cu sondă aerometrică, etc. Funcţionarea lor se bazează pe faptul că, densitatea este direct proporţională cu masa fluidului. Coeficientul de proporţionalitate depinde de volumul fluidului supus măsurării şi parametri mediului ambiant din incinta în care se face măsurarea.
5.1.1. Măsurarea presiunii
Măsurarea presiunii se face cu ajutorul unor aparate numite manometre. Manometrele care măsoară presiunea absolută se numesc barometre, iar cele care măsoară presiunea relativă faţă de presiunea atmosferică, se numesc manometre, pentru suprapresiune (presiunea măsurată este mai mare decât presiunea atmosferică), şi vaccummetre pentru depresiuni (presiunea măsurată este mai mică decât presiunea atmosferică). Aparatele care măsoară atât suprapresiuni cât şi depresiuni se numesc mano-vaccummetre, iar cele care măsoară diferenţe de presiuni se numesc manometre diferenţiale.
în funcţie de natura elementului sensibil, manometrele pot fi: cu lichid, cu element elastic, cu traductor, şi combinate (element elastic şi traductor).
Manometrele cu lichid, se pot utiliza la măsurarea suprapresiunilor, sau a diferenţelor mici de presiune. Cele mai răspândite sunt mano-vacuummetrele cu tub în formă de U, confecţionate din sticlă obişnuită, pentru presiuni mici, barp 0,5≤ , sau confecţionate din sticlă specială (Piacryl), pentru presiuni mari, barp 100≤ (fig. 5.1. a, b). În tub se introduce un lichid (apă, mercur, etc.).

48
Funcţionarea manometrului se bazează pe legea distribuţiei presiunii la lichidele în repaus:
hgpp l ⋅⋅=− ρ0 (5.1)
unde: p unde presiunea absolută; p0 este presiunea atmosferică; g este acceleraţia gravitaţională; ρl este densitatea lichidului; h este diferenţa de nivel.
Suprapresiunea ps rezultă din egalitatea:
)( 1001 hhgppphgphgp lsl ⋅−⋅⋅=−=⇒⋅⋅+=⋅⋅+ ρρρρ (5.2)
în mod analog, depresiunea pd rezultă din egalitatea :
)( 1001 hhgppphgphgp lsl ⋅−⋅⋅=−=⇒⋅⋅+=⋅⋅+ ρρρρ (5.3)
Dacă densitatea ρ a fluidului, este mult mai mică decât densitatea lichidului din mano-vacuummetru lρρ << , atunci se poate considera că presiunea relativă ρs,d (suprapresiunea
sau depresiunea) depinde numai de diferenţa de nivel h şi densitatea ρl a lichidului din manometru:
][322,133][, PahHgmmhp ds ⋅== sau ][10][ 2, PahOHmmhp ds ⋅== (5.4)
Diferenţa de presiune ∆p, rezultă din egalitatea :
)(121122 ρρρρρ −⋅=−=∆⇒⋅⋅+⋅⋅+=⋅⋅+ ll hgppphghgphgp (5.5)
Dacă densitatea lρρ << , diferenţa de presiune depinde numai de diferenţa de nivel h şi
densitatea ρl a lichidului din manometru:
][322,133][ PahHgmmhp ⋅==∆ sau ][10][ 2 PahOHmmhp ⋅==∆ (5.6)
b) c)
?
h
pp
r
f
a
G
a)
0
2 ?p p
1
p0
p2
1
F 2h1
l? ?
l
h2 h1
h
l b
F 1
Figura 5.1. Manometre cu lichid
Un alt tip de manometru diferenţial cu lichid, este manometrul cu balanţă inelară (fig. 5.1.c). Este format dintr-un tub inelar, confecţionat din oţel dacă presiunile din tub depăşesc 100 bar.

49
Datorită diferenţei de presiune din cele două camere ale tubului, acesta se roteşte cu un anumit unghi α. Diferenţa de presiune ∆p, rezultă din egalitatea:
αα sinsin)( 12 ⋅⋅=∆⇒⋅⋅=⋅−⋅t
bbt A
G
r
lplGrppA (5.7)
unde: r este raza medie a tubului inelar; At este aria secţiunii interioare a tubului inelar; G este greutatea sistemului mobil; lb este distanţa între axa de rotaţie şi centrul de greutate a sistemului mobil.
Dacă 01 = pp (racordul 1 este pus în legătură cu atmosfera), atunci manometrul cu balanţă
inelară poate măsura suprapresiuni sau depresiuni.
Manometrele cu element elastic, numite şi manometre mecanice, măsoară presiuni într-un domeniu foarte mare, de ordinul sutelor de bar.
Manometrele mecanice sunt formate din, element elastic (captorul), mecanism de transmitere şi amplificare a mişcării (deformaţia elementului elastic), şi dispozitiv indicator (în mod obişnuit, cu scară gradată şi ac indicator).
Elementul elastic poate fi sub formă de membrană, burduf, sau tub. Presiunea fluidului acţionează asupra elementului elastic, iar deformaţia acestuia este transmisă şi amplificată de către mecanism, la acul indicator.
Membranele sunt plăci elastice, de grosime mică, de formă circulară, încastrate pe tot conturul exterior. Membranele se clasifică după forma suprafeţei: în membrane plane şi în membrane ondulate.
Membranele plane au forma unui disc prevăzute în partea centrală cu o flanşă de legătură cu mecanismul de transmitere şi amplificare (fig. 5.2. a).
Membranele ondulate numite şi membrane gofrate, sunt prevăzute cu cute concentrice (gofreuri), cu secţiunea de formă sinusoidală, circulară, trapezoidală, etc. Datorită acestor cute, creşte domeniul de liniaritate, la aceiaşi grosime, faţă de membranele plate (fig. 5.2. b). Dacă două membrane ondulate se încastrează pe contur, se obţine elementul elastic numit capsulă manometrică. Fluidul acţionează în interiorul capsulei (fig. 5.2. c).
Figura 5.2. Membrane manometrice
Membranele plate se confecţionează din bronz cu beriliu sau oţel inoxidabil, iar membranele ondulate se confecţionează numai din bronz cu beriliu.
f
R
r 0
p p
R
r 0
f p
a) Membrană plană b) Membrană gofrată c) Membrană manometru

50
Burduful numit şi tub ondulat sau sifon, are forma unui tub cilindric, prevăzut cu gafroze transversale pe suprafaţa laterală (fig. 5.3. a). Are avantajul că se obţin deformaţii mari la presiuni moderate. Se confecţionează din bronz cu beriliu, iar domeniul de măsurare este limitat la bar 30) ÷(20 .
Tuburile numite şi arcuri manometrice, deoarece au lungimea mult mai mare decât dimensiunile secţiunii. După formă, arcurile manometrice sunt de mai multe feluri: Burdon, elicoidal, spiral, răsucit, în formă de S, etc.
Tuburile Burdon sunt cele mai răspândite, au o construcţie simplă, se folosesc pentru un domeniu mare de măsurare, până la 400 bar (fig. 5.3. b).
Re
L
p p
p
a) tub ondulat c) tub elicoidal
b) tub Bourdon d) tub spiral
e) tub rasucit f) tub S
p
p
f
R i
r
Figura 5.3. Tuburi manometrice
Tuburile elicoidale (fig. 5.3. c), spirale (fig. 5.3. d) şi cele în formă de S (fig. 5.3. f), realizează o cursă relativ mare a capătului liber, se pot folosi fără mecanism amplificator, dar au o construcţie relativ complicată.
Tuburile răsucite se folosesc pentru presiuni mari, de ordinul sutelor de bari, fără mecanism amplificator (fig. 5.3. e).
Secţiunile tuburilor folosite la manometre pot avea diferite forme: eliptică (fig. 5.4. a), ovală (fig. 5.4. b), semieliptică (fig. 5.4. c), sau de formă specială (fig. 5.4. d). Sub acţiune presiunii din interior, secţiune îşi măreşte raza de curbură. Tuburile cu secţiunea în formă semieliptică are o sensibilitate mai mare, iar secţiunea de formă specială are arie minimă. Materialul din care se confecţionează tuburile manometrice este bronzul aliat cu beriliu.
Manometrele cu membrană sunt formate din capsula (1), mecanismul de transmitere şi amplificare (2) şi dispozitivul indicator (3) (fig. 5.5. a). Capsula este formată din membrana (ondulată) (1a) fixată între două flanşe. Flanşa din partea inferioară este prevăzută cu racordul (1b), prin care fluidul a cărui presiune se măsoară întră în contact cu membrana elastică. Flanşa superioară este prevăzută cu ghidajul (1c), prin care culisează tija de legătură

51
cu mecanismul de transmitere şi amplificare. Mecanismul este format din sectorul dinţat (2a) şi pinionul (2b). Pinionul este montat pe axul acului indicator (3b), care prin intermediul scării gradate (3a), indică valoare presiunii măsurate.
a) eliptica b) ovala c) semieliptica d) forma speciala
Figura 5.4. Forme de secţiuni la tuburile manometrice
Manometrele cu tub manometric sunt formate din tubul elastic (1) încastrat în racordul (4) (fig. 5.5. b). Capătul liber al tubului este în legătură cu mecanismul de transmitere şi amplificare (2). Tubul elastic se deformează în funcţie de valoarea presiunii fluidului, care este indicată de acul indicator (3).
a) manometru cu membrana b) manometru cu tub elastic
0
2
4
6
20
0
40
60
1b
1a1c
2a
2b
3b
3a
4
3
2
1
Figura 5.5. Manometre cu element elastic
Manometrele combinate, numite şi manometre cu traductor au captorul format dintr-un element elastic şi un traductor. Sub acţiunea fluidului elementul elastic se deformează, care este sesizată de traductor. Se folosesc traductoare rezistive, inductive, capacitive şi piezoelectrice.
Traductorul rezistiv sau marcă tensometrică, se lipeşte pe elementul elastic al captorului cu adeziv (solvenţi cu întărire prin reacţie chimică, termoplastici, ceramici). Alungirea specifică
lll /∆=ε a conductorului sau semiconductorului este direct proporţională cu variaţia
rezistenţei electrice specifice RR/∆ a traductorului tensometric. În general, traductorul tensometric se conectează la o punte Wheatstone alimentată cu curent continuu. Puntea transformă variaţia de rezistenţă R∆ într-o variaţie proporţională de tensiune sau curent.

52
Pentru a elimina erorile de măsurare produse de variaţia temperaturii se folosesc una sau două perechi de traductoare identice. Un traductor al perechii denumit traductor activ se montează paralel iar celălalt denumit traductor pasiv se montează transversal, faţă de axa de deformaţie. Datorită modului de montaj, numai traductorul activ este supus deformaţiei. Rezistenţa traductorului activ variază atât datorită deformaţiei cât şi datorită temperaturii, iar rezistenţa traductorului pasiv variază numai datorită temperaturii. Dacă cele două traductoare se leagă în semipunte, atunci variaţia rezistenţei traductorului activ datorită temperaturii este anulată de variaţia rezistenţei traductorului pasiv, deoarece ele sunt supuse la aceiaşi variaţie de temperatură.
Captorul cu membrană elastică (fig. 5.6. a) este format din membrana (1) pe care este fixată marca tensometrică activă (T1a). Pentru compensarea influenţei temperaturii, pe corpul (2) se montează marca tensometrică pasivă (T1p) cu parametri identici cu a mărcii (T1a). Legătura cu fluidul cărui presiune se măsoară, se face prin racordul (3).
Figura 5.6. Captoare tensometrice pentru manometre combinate
Captorul cu tub elastică este format din tubul (1) pe care sunt fixate mărcile tensometrice active (T1a) şi (T2a) şi mărcile tensometrice pasive (T1p) şi (T2p). Elementul elastic (1) se fixează în corpul (2) prin piuliţa (3). Legătura cu fluidul se face printr-un racord prevăzut în corpul (2) (fig. 5.6. b). Mărcile tensometrice se conectează în punte Wheatstone (fig. 5.6. c).
Captorul inductiv este format din membrana elastică (1) pe care se fixează miezul magnetic (2). Prin deformarea membranei de către presiunea fluidului se produce modificarea inductanţelor (L1), (L2) de la bobine. Legătura captorului cu fluidul se face prin racordul (3) (fig. 5.7. a).
Captorul piezoelectric este format din membrana elastică (1) pe care se fixează tija de presare (1a). Presiunea fluidului produce deformarea membranei, care prin intermediul tijei comprimă pachetul de plăcuţe piezoelectrice (2). Pachetul de plăcuţe este pretensionat între paharul (2a) şi piuli ţa (2b). Captorul face legătura cu fluidul prin racordul (3) (fig. 5.8. b). Prin racordul (3) captorul face legătura cu fluidul printr-un orificiu prevăzut în peretele solid al recipientului sau a conductei de curgere, numit priză de presiune (fig. 5.7. c). Orificiul de racordare produce eroare de măsurare deoarece valoarea presiunii pm cu care acţionează fluidul asupra membranei elastice este diferită (mai mică) decât valoarea presiunii pi din punctul de măsurare. Diferenţa de presiune se produce datorită pierderilor prin frecare şi impuls din
U e
U o
T1a
T2p
1pT
2a T
2p T
T2a
1
23
1aT
T1p1p T 1aT
1
2
3
p
p
a) b) c)

53
orificiul de legătură. Valoarea acestor pierderi depinde de dimensiunile orificiului diametrul dc, şi a lungimii l. Dimensiunile au următoarele valori: la lichide, dc = (1 ÷ 1,5) mm, iar la gaze dc = (3 ÷ 12) mm şi l = (0,5 ÷ 5) · dc.
L2
L1
1
2
4
3
p
2b
3
2
2b
1a
1
dc
captor
pm
ip
la) captor inductiv b) captor piezoelectric c) priza de presiune
p
Figura 5.7. Captoare pentru manometre combinate
Manometrele combinate se pot folosi şi la măsurarea presiunilor variabile. Manometrele cu traductor tensometric au domeniul de măsurare (0 ÷ 1200) bar şi pulsaţia proprie ωp = (1,5 ÷ 70) kHz, iar manometrele piezoelectrice au domeniul de măsurare (0 ÷ 1000) bar şi pulsaţia proprie ωp = (10 ÷ 180) kHz.
5.1.2. Măsurarea temperaturii
Măsurarea temperaturii se face cu ajutorul unor aparate numite termometre. Elementul sensibil a acestor aparate poate fi: bimetal, fluid, rezistenţă electrică, conexiune între două metale diferite (efect termoelectric), etc. Prin contactul direct dintre elementul sensibil şi mediul supus măsurării, după egalizarea temperaturilor (echilibru termic) se produce semnalul metrologic.
Termometrele se clasifică în funcţie de elementul sensibil în: termometre cu bimetal, termometre de sticlă cu lichid, termometre manometrice cu fluid (lichid sau gaz), termometre cu traductor. O categorie specială de aparate pentru măsurarea temperaturii sunt pirometrele. Pirometru sunt aparate care măsoară temperatura fără contact cu mediul supus măsurării.
Termometrul cu bimetal este format dintr-o bandă bimetalică (1) de formă cilindrică. Banda bimetalică se obţine prin placarea (lipirea) a două fâşii metalice cu coeficienţii de dilatare diferiţii. La o variaţie de temperatură se produce modificarea razei de curbură a benzii bimetalice. Deplasarea capătului liber al benzii se transmite prin mecanismul (sector dinţat-roată dinţată) (2), la acul dispozitivului indicator (3) (fig. 5.8. a).

54
Termometrul de sticlă cu lichid, este format dintr-un rezervor (1) sub forma unui bulb, şi un tub capilar (2). La o variaţie a temperaturii, datorită dilatării lungimea coloanei de lichid din tubul capilar se modifică. Valoarea temperaturii se stabileşte cu ajutorul scării gradate (3) din spatele tubului capilar (fig. 5.9. b). Lichidul din rezervorul termometrului se alege în funcţie de domeniul de măsurare (mercur -35 ÷ 300 °C; toluen -80 ÷ 100 °C; alcool etilic -110 ÷ 70 °C; pentan tehnic -200 ÷ 20 °C; etc.).
20
0
40
60
c) termometru manometrica) termometru bimetalic
1 0
2 0
4 0
3 0
7 0
6 0
5 0
b) termometru cu lichid
1
1
22
3
2
3
1 3
Figura 5.8. Termometre cu dilatare
Termometrul manometric cu fluid este format din rezervorul (1) plasat în mediul a cărei temperatură se măsoară. Rezervorul prin tubul capilar (2) este pus în legătură cu manometrul (3), cu scara gradată în unităţi de temperatură (fig. 5.8. c). La o variaţie de temperatură, presiunea lichidul sau gazul din rezervor se modifică, care este sesizată de dispozitivul indicator al manometrului. Fluidul din rezervorul termometrului se alege în funcţie de domeniul de măsurare (mercur -35 ÷ 300 °C; clorură de metil 0 ÷ 120 °C; clorură de etil 30 ÷ 120 °C; alcool etilic 100 ÷ 220 °C; toluen 150 ÷ 250 °C; etc.).
Termometrele cu traductor poate fi cu traductor rezistiv sau cu traductor termoelectric. Semnalul electric emis de traductor este transmis şi preluat de dispozitivul indicator al aparatului de măsurare.
Termometrul cu rezistenţă este format rezistenţa (elementul sensibil) (1) înfăşurată pe un suport izolant (2). Elementul sensibil se protejează de mediul supus măsurării prin tubul (teaca) (3). Legătura traductorului la circuitul electric se face prin conexiunile (4) (fig. 5.9. a).
Elementul sensibil se confecţionează din conductor metalic sau semiconductor. Rezistenţa din conductor metalic este sub formă de sârmă, cu valoarea rezistenţei electrice cuprinsă între 10 Ω ÷30 kΩ. Materialul conductorului se alege în funcţie de valoarea domeniului de măsurare, cupru -30 ÷ 150 °C; nichel -50 ÷ 300 °C; wolfram -50 ÷ 600 °C; platină -200 ÷ 800 °C. Elementul sensibil realizat din material semiconductor numit şi termistor, are formă de perlă sau baghetă de dimensiuni miniaturale cu valoarea rezistenţei electrice cuprinsă între 500Ω ÷ 5 MΩ. Se confecţionează prin sinterizare din pulberi de oxizi metalici (de nichel, mangan, cobalt, etc.) sau din pulberi ceramice.

55
Termometrele cu termistor din pulberi metalice au domeniul de măsurare cuprins între 100 ÷ 400 °C, iar termometrele cu termistor din pulberi ceramice au domeniul de măsurare cuprins între 100 ÷ 1200 °C. Avantajele termometrelor cu termistor este constanta de timp mică (măsurări variabile), au rezistenţă electrică şi coeficient de temperatură mare. Variaţia relativă a conductibilităţii în funcţie de temperatură scade exponenţial.
Materialul şi forma suportului depinde de domeniul de măsurare şi modul de fixare. Pentru măsurări până la 650 °C suportul se confecţionează din sticlă specială, porţelan sau mică, iar pentru temperaturi mai mari suportul se confecţionează din alumină sinterizată. Materialul pentru izolarea electrică a rezistenţei este identic cu cel al suportul. La măsurarea temperaturilor superficiale ale pereţilor suportul este plat şi se fixează prin sudare sau lipire.
Teaca de protecţie se confecţionează din cupru, oţel inoxidabil, nichel, sau crom, în funcţie de domeniul de măsurare şi agresivitatea mediul cu care vine în contact traductorul. Teaca se umple cu ulei mineral, glicerină, mercur, sau pilitură de fier, pentru a îmbunătăţi contactul termic dintre teacă şi elementul sensibil. Datorită tecii constanta de timp a traductorului este mare (de ordinul zecilor de secunde). Micşorarea constantei de timp se poate face prin reducerea dimensiunilor traductorului la valori cât mai mici şi renunţarea la teacă.
FeNi
a) b) c)
1
2
3
4
1
3
2
1 2
5
Ø3
Figura 5.9. Termometre cu traductoare
Circuitul electric al termometrului poate fi simplu sau cu punte tip Wheatstone. Dispozitivul indicator al aparatului de măsurare poate fi cu afişare prin deviaţie (logometru), numerică, grafică sau magnetică.
Termometrul cu termocuplu este format dintr-un traductor termoelectric. Elementul sensibil al traductorului este jocţiunea de măsurare . Jocţiunea poate fi protejată de acţiunea mediului supus măsurării printr-o teacă, la fel ca la traductoarele cu rezistenţă. Pentru a mării viteza de răspuns, termocuplu se execută din sârmă subţire şi fără teacă de protecţie. Pentru măsurare temperaturii pereţilor, elementul sensibil se montează într-un dop. Dopul se confecţionează din materialul peretelui cu dimensiuni cât mai mici posibil, pentru reduce perturbaţiile produse de prezenţa traductorului şi pentru mării precizia de măsurare. De exemplu, pentru măsurarea temperaturii pereţilor din fontă sau oţel se poate folosi jocţiune de tipul fier-nichel sau fier-constantan (fig. 5.9. b). Jocţiunea este formată din pelicula (1) confecţionată din nichel sau constantan şi dopul din fier (2). Se fixează pe perete prin racordul (3). În general, dopul se mai poate fixa pe perete prin sudare sau lipire, iar jocţiunea şi firele de legătură se izolează electric (fig. 5.9. c).

56
Termometrele cu termocuplu sunt prevăzute cu un circuit electric simplu la care se conectează dispozitivul indicator şi eventual o rezistenţă de reglaj.
Pirometrele sunt termometre destinate măsurării temperaturilor înalte (peste 1000 °C). Metoda de măsurare se bazează pe legătura între temperatură şi energia sau intensitatea radiaţiei termice emise de corpuri solide sau gazoase. Energia totală emisă prin radiaţie termică de un corp (cenuşiu), este determinată de legea Stefan-Boltzmann :
4TkE ⋅⋅= σ (5.8)
unde: k este coeficientul total de emisie al radiaţiei termice; σ este constanta Stefan-Boltzmann; T este temperatura corpului. Coeficientul total de emisie k, mai este denumit şi coeficient de înnegrire a corpului cenuşiu.
Intensitatea radiaţiei termice monocromatice (lungimea de undă λ) emisă de un corp (cenuşiu), este dată de legea lui Kirchhoff :
00 λλλλλ α IIkI ⋅=⋅= (5.9)
unde: kλ este coeficientul monocromatic de emisie al radiaţiei; αλ este coeficientul monocromatic de absorbţie; T),f(
0λλ =I este intensitatea radiaţiei termice monocromatice a
corpului negru.
Radiaţia termică este de natură electromagnetică şi este emisă de corpuri cu temperatura T > 0 K. La creşterea temperaturii, lungimea de undă λ a radiaţiei termice scade. La temperaturi de peste 800 K radiaţia termică este în domeniul vizibil, culoarea corpurilor se modifică, de la roşu trece prin galben, şi devine albastru deschis la temperaturi foarte mari. La corpurile solide, coeficientul total de emisie k, coeficientul monocromatic de emisie kλ sau de absorbţie αλ, depind de natura materialului, temperatură, formă, dimensiuni, rugozitatea suprafeţei, unghiul de incidenţă, etc. La gaze coeficienţii k, kλ, αλ, depind şi de lungimea de undă a radiaţiei, compoziţia, şi presiunea gazului.
Datorită caracterului selectiv de emisie şi absorbţie a gazelor în funcţie de lungimea de undă a radiaţiei, legea lui Kirchhoff se aplică numai pe benzi de lungimi de undă foarte înguste. Pentru acest fapt, pirometrele pentru gaze mai sunt prevăzute şi cu un sistem optic cu prismă (spectoscop), care transformă radiaţia termică într-un spectru de radiaţii monocromatice.
Pirometrele care măsoară temperatura pe baza energiei totale emisă de corpul (C) se numesc pirometre de radiaţie (fig. 5.10. a). Pirometrul este format din diafragma (1), oglinda concavă (2), elementul sensibil (3), şi dispozitivul indicator (4). Radiaţia termică emisă de corpul (C) trece prin fanta diafragmei (1) şi este concentrată pe elementul sensibil (3) de către oglinda (2). Elementul sensibil (termocuplu) transformă energia termică a radiaţiei în energie termică. Curentul electric din generat de termocuplu este proporţional cu temperatura corpului studiat. Scara dispozitivului indicator a aparatului de măsură (4) este gradată direct în unităţi de temperatură.
Deoarece energia radiată de corp depinde de natura materialului, starea suprafeţei, etc., şi este afectată de absorbţia gazelor şi dispersia provocată de particulele în suspensie din atmosferă, iar etalonarea se face în raport de radiaţia emisă de corpul negru, valorile indicate trebuie corectate folosind tabele sau diagrame care însoţesc aparat de măsură.
În general, pirometrele pentru gaze mai cuprind o sursă de radiaţie (de referinţă) şi un spectroscop. Radiaţia termică produsă de sursa de referinţă amplifică radiaţia produsă de gaz, care este divizat într-un spectru de radiaţii monocromatice de către spectroscop. Asupra elementului sensibil este dirijat numai un spectru cu o bandă îngustă de lungime de undă, care radiază la intensitatea cea mai mare. Dacă gazul nu radiază pe nici o lungime de undă la o intensitate convenabilă, atunci se aditivează cu anumite substanţe (sodiu sau compuşi ai

57
sodiului). Temperatura substanţei este aceiaşi cu temperatură gazului şi emite radiaţie termică la intensitate convenabilă.
Pirometrele care măsoară temperatura pe baza intensităţii (luminoase) a radiaţiei termice emise de corpul (solid) (C), se numesc pirometre fotometrice (fig. 5.10. b). Pirometrul compară intensitatea radiaţiei monocromatice emisă de corp cu intensitatea radiaţiei emisă de o sursă de referinţă.
2 4 6
8
7
a) b)
C 1 3 2
4
T T
C 31 5
Figura 5.10. Pirometre
Pirometrul fotometric cu "dispariţie de filament" este format din lentila obiectivului (1), diafragma (2), becul electric (3), lentile ocularului (4) şi (6), filtru ocularului (din sticlă roşie) (5), reostatul (7), şi dispozitivul indicator (8). În ocularul aparatului imaginea filamentului de la becul electric se suprapune peste fondul de culoare a corpului incandescent (C). Filtrul (5) permite trecerea radiaţiei cuprinsă într-o bandă îngustă, aproape monocromatică, cu lungimea de undă aproximativ mµλ 65,0= (radiaţie roşie a spectrului vizibil). Observatorul reglează intensitatea sursei de referinţă cu ajutorul reostatului (7) până când imaginea filamentului de la becul electric dispare pe fondul de culoare a corpului. În acest moment, intensitatea radiaţiei emisă de sursa de referinţă este egală cu intensitatea radiaţiei emisă de corpul studiat. Intensitatea radiaţiei termice emisă de sursa de referinţă este în funcţie intensitatea curentului electric care trece prin filament. Dispozitivul indicator (8) are scara gradată direct în unităţi de temperatură.
Pirometrele fotometrice pot fi prevăzute cu un element fotosensibil, care compară intensitatea radiaţiei termice emisă de corp, cu intensitatea radiaţiei termice emisă de sursa de referinţă. În acest mod se evită erorile subiective pe care le poate produce utilizatorul aparatului de măsură.

58
C6. Aparate şi metode de măsurare a parametrilor cinematici
Parametri cinematici ai corpurilor solide sunt deplasarea, viteza şi acceleraţia. Deplasare se determină în general prin măsurare directă, iar viteza şi acceleraţia se determină prin măsurare directă sau indirectă. Măsurarea acceleraţiei se face în general numai la studiul experimental al vibraţiilor mecanice.
Parametri cinematici al fluidelor sunt viteza, şi debitul curentului de fluid. Curgerea fluidului se consideră unidirecţională. Ea se caracterizează prin direcţie invariabilă (fixă) a vitezelor dintr-o secţiune, şi prin suprapunerea traiectoriilor particulelor de fluid, cu liniile de curent.
6.1. Măsurarea deplasărilor
Deplasarea reprezintă modificarea poziţiei unui corp faţă de un reper de referinţă. Curba descrisă de un punct ce aparţine unui corp în mişcare se numeşte traiectorie. În funcţie forma traiectoriilor, deplasarea corpului poate fi: deplasare liniară, când corpul efectuează o mişcare de translaţie; deplasare circulară sau unghiulară când corpul efectuează o mişcare de rotaţie; şi deplasare complexă când corpul efectuează o mişcare complexă. Mişcarea complexa se poate descompune în mişcări simple, de translaţii, şi de rotaţii.
Deplasarea liniară mică (sub 1 mm) se măsoară cu aparate prevăzute cu traductoare parametrice: rezistive, inductive sau capacitive.
Deplasarea liniară medie (de ordinul sutelor de milimetrii) se măsoară cu aparate cu traductor inductiv cu miez mobil.
Deplasarea liniară mare (de ordinul zecilor de metrii) se măsoară cu aparate prevăzute cu traductor inductiv numit inductosin liniar, cu traductoare optice sau cu interferometru cu laser.
Inductorul liniar din punct de vedere electric este un transformator fără miez de fier. Partea fixă reprezintă primarul sau inductorul transformatorului, numită riglă. Pe riglă este fixată o bobină, realizată sub forma unui circuit imprimat cu pasul p constant (de obicei 4 mm) (fig. 6.1. a).
Inductorul este alimentat cu un curent electric de frecvenţă mare (circa 20 kHz) şi cu o variaţie sinusoidală )sin(max11 tUU ω⋅= . Partea mobilă reprezintă secundarul sau indusul
transformatorului, numită cursor. Cursorul se aseamănă constructiv cu partea fixă, dar este mult mai scurt. Se montează paralel cu rigla, cu un joc de (0,05 - 0,15) mm. În bobină cursorului se induce un curent cu valoarea tensiunii )/2cos()sin(max22 ptUU πδω ⋅⋅= , care
este în funcţie de decalajul δ între spire. Poziţia cursorului faţă de riglă este direct proporţională cu numărul de maxime ale tensiunii curentului indus. Printr-un sistem electronic se realizează numărarea punctelor de tensiune maximă, şi determinarea poziţiei.
Traductorul optic se compune din partea mobilă, numită riglă (Rg) pe care se succed alternativ diviziuni egale, transparente, şi opace, (fig. 6.1. b). Rigla este plasată între sursa de lumină (Sl) şi sistemul electro-optic cu fotodioda (Fd). Pentru a mări intensitatea fluxului luminos ce cade pe fotodiodă, se foloseşte o contrareţea (Cr) , care are diviziunile cu acelaşi pas cu a riglei. Fluxul luminos ce trece prin diafragma (Df), rigla (Rg), şi contrareţeua (Cr) , este focalizat de lentila (Lf) pe fotodioda (Fd), care produce un impuls electric de tensiunea U. Numărul impulsurilor electrice este direct proporţional cu distanţa parcursă de partea mobilă (rigla) a traductorului. Traductorul optic face parte din categoria traductoarelor numerice.

59
Alte tipuri de traductoare numerice sunt: traductorul cu contact şi traductorul magnetic. Aceste traductoare ca şi traductorul optic se compun dintr-o parte fixă şi una mobila. În partea mobila sau fixa se produc semnale electrice discrete. Informaţia este prelucrată şi înregistrată într-un cod oarecare. În acest, caz se folosesc rigle codificate. De exemplu, rigla codificată în cod binar este prevăzută cu un număr de piste egal cu rangul numărul binare care exprimă valoarea maximă a deplasării printr-un număr zecimal (fig. 6.2.). În dreptul fiecărei piste este prevăzut un element sensibil (fotodiode), care produc trenuri de impulsuri. Elementul sensibil din dreptul primei piste (02 ) (de referinţa) produce impulsuri de lăţime l∆⋅02 , a doua pistă ( 12 ) produce impulsuri de lăţime l∆⋅12 , a treia pistă ( 22 ) produce impulsuri de lăţime
l∆⋅22 , a n-a pistă ( 12 −n ) produce impulsuri de lăţime ln ∆⋅−12 (fig. 6.2. b).
Fix
Mobil
d
SI
DfRg
Cr
FdLf
U2
x
UU2
U1
U
p
δ
a) b)
Figura 6.1. Traductoare pentru măsurarea deplasărilor
De exemplu deplasarea 12=l are codul binar 00110202121202012 43210 =⋅+⋅+⋅+⋅+⋅= .
Interferometru cu laser este un instrument de măsurat distanţe bazat pe fenomenul interferenţei a două sau mai multe unde luminoase. Interferenţa undelor luminoase este materializată printr-un sistem franje.
Aparatul este format din sursa de laser He-Ne (L) , sistemul optic (SO), divizorul de fascicol (DF), oglinda mobila (OM) , oglinda fixa (OF) şi sistemul fotoelectric (SFE). Sursa de lumină de tip laser (L) produce o undă luminoasă monocromatică cu lungimea de unda
Fascicolul luminos produs de laser trece prin sistemul optic (SO), care îi reduce divergenta. Divizorul de fascicol (DF) este o oglindă semitransparentă care divide fascicolul laser în două direcţii spre oglinda mobila (OM) şi oglinda fixă (OF). Oglinzile reflectă cele două fascicole luminoase, care prin suprapunere produc sistemul de franje proiectat pe elementul sensibil al sistemului fotoelectric (SFE). Distanţa x cu care se deplasează oglinda mobilă este dată de numărul de franje m înregistrat de sistemul fotoelectric:
2λ⋅= mx (6.1)

60
Interferometrul cu laser are următoarele avantaje: erori de măsurare mici ( mm/5,0 µ< ); sensibilitate mare ( mm/1,0 µ ); fiabilitate metrologica mare.
a)
0 1 2 3 4 5 6 7 8 9 10 1211 13 14 15 16
20
21
22
23
42
- 0 binar - 1 binar
110 1 2 3 4 65 7 8 9 10 1412 13 1615
b)
16x∆l
8x∆l
4x∆l
2x∆l
∆l
fotodiode
l
Figura 6.2. Riglă cu cod binar
Deplasarea unghiulară se măsoară cu aparate prevăzute cu traductoare parametrice (rezistive, inductive, capacitive), inductive şi optice. Se aseamănă cu traductoare liniare, elementele sunt adaptate pentru deplasări unghiulare.
În unele cazuri, aparatele de măsură pentru deplasări liniare mari sunt prevăzute cu traductoare pentru deplasări unghiulare, mişcarea liniară este transformată într-o mişcare de rotaţie (mecanism roată dinţată-cremalieră, şurub-piuliţă, etc.), rigla este înlocuită cu un disc.
x
L SO OF
OM
DF
SFE
Figura 6.3. Interferometru cu laser
6.2. Măsurarea vitezelor
Viteza reprezintă variaţia deplasării în unitate de timp. Variaţia deplasării liniare în unitate de timp reprezintă viteza liniară, se notează cu w şi se măsoară în m/s, iar variaţia unghiului de poziţie a unui punct material în mişcare circulară reprezintă viteza unghiulară, se notează cu 30/nw ⋅= π şi se măsoară în rad/s, n reprezintă turaţia în rot/min.
Viteza liniară se măsoară cu aparate care determină în mod continuu valoarea instantanee şi aparate care determină valoarea medie a vitezei.
Viteza instantanee w se măsoară cu aparate de măsură prevăzute cu traductoare inductive. Traductorul este format din bobina (1) (de lungimea l cu N spire) şi miezul mobil (2)

61
confecţionat din magnet permanent cu inductanţa B (constant) (fig. 6.4. a). Dacă miezul se deplasează cu viteza w, atunci în bobină se induce t.e.m de valoare u:
wkd
dxlBN
d
dNu ⋅=⋅⋅⋅−=Φ⋅−=
ττ (6.2)
în concluzie, viteza părţii mobile (2) a traductorului este direct proporţională cu tensiunea electromotoare indusă în bobină (fig. 6.4. b).
Viteza medie wm se poate determina indirect, prin măsurarea timpului τ necesar pentru parcurgerea distantei l, τ/lwm = ; sau direct, prin măsurarea distantei xil ∆⋅= pe care o
parcurge elementul mobil într-un interval de timp stabilit τ0: ikxilwm ⋅=∆⋅== 00 // ττ .
în general, aparate pentru măsurarea vitezei medii sunt prevăzute cu traductoare tip numeric, care produc impulsuri electrice: prin contact; prin inducţie electromagnetică; sau prin efect fotoelectric.
a)
u
w
b)
12
u
w
S
N
Figura 6.4. Traductor inductiv de viteză
Traductorul inductiv numit traductor cu reluctanţă variabilă este format din bobina (1) înfăşurată pe un miez de fier. De miezul de fier este fixat magnetul permanent (1a). Partea mobila (2) este prevăzută cu două proeminenţe feromagnetice dispuse la distanta l (fig. 6.5.a).
În momentul când o proeminenţă de pe partea mobilă este în dreptul bobinei se induce un impuls electric, deoarece reluctanţa circuitului magnetic format din magnetul permanent şi miezul de fier se modifică (devine minimă). Daca se măsoară timpul τ de la primul până la al doilea impuls, se poate calcula viteza medie wm a parţii mobile, τ/lwm = .
Traductorul fotoelectric este format din sistemul fotoelectric (1) (sursa de lumină, elementul fotosensibil, sistemul optic) şi rigla (2). Rigla mobilă (2) este prevăzută cu fante (sau fâşii reflectorizante) dispuse la distanta ∆x. În momentul cât fanta (sau fâşia reflectorizantă) ajunge în dreptul elementului fotosensibil al traductorului, acesta produce un impuls electric

62
(fig. 6.5. b). Viteza medie wm este direct proporţională cu numărul de impulsuri i produse în intervalul de timp τ0: ikxiwm ⋅=∆⋅= 0/τ .
a) b)
1 2w
e
S
N1a
1 2w
l
τ
ττ
u 0eu
eu
eu
∆x
Figura 6.5. Traductoare de impulsuri pentru viteze liniare
Tura ţia se măsoară cu aparate numite tahometre sau turometre. Se clasifică în funcţie de tipul elementului sensibil în: turometre mecanice prevăzute cu captor mecanic, turometre cu curenţi turbionari prevăzute cu captor inductiv, turometre stroboscopice prevăzute cu captor optic şi turometre cu traductor, prevăzute cu traductoare inductive sau de impulsuri.
Turometrele mecanice au un captor prevăzut cu corpuri în mişcare de rotaţie numite contragreutăţi. Asupra contragreutăţilor acţionează forţe centrifuge proporţionale cu pătratul turaţiei 2nkFc ⋅= . Tahometrul se montează la capătul arborelui (1) a cărui turaţie se măsoară.
Sub acţiunea forţelor centrifugale, contragreutăţile (2) produc rotirea acul de la dispozitivul indicator (4). Mişcarea acului este amortizată de amortizorul (5). Pentru a exista o dependenţă liniară între turaţia n şi unghiul de rotire a acului indicativ, caracteristica acului (3) (etalonul) trebuie să fie o parabola (fig. 6.6. a).
a) b)
1
n
0
N
S
semnal de comanda
+
-
100 200 3
4
5
2
cF
cF
c)
0
100200
n
θ
1
4
2
3 1
1a
2
2b
2c2c
nR
U C
Figura 6.6. Turometre cu captor

63
Turometrele cu curenţi turbionari sunt formate din magnetul (1), care se roteşte în carcasa feromagnetica sub forma de clopot (2), (fig. 6.6. b). Câmpul magnetic al părţii rotitoare induce în carcasa curenţi turbionari, care interacţionează cu câmpul magnetic al rotorului, producând un cuplu asupra carcasei. Cuplul este echilibrat de arcul spiral (3) (etalonul). Caracteristica arcului se alege în aşa fel încât să rezulte o dependenţă liniară între unghiul de rotire θ şi turaţia n a rotorului. În felul acesta, gradaţiile scării dispozitivului indicator (4) sunt echidistante. Domeniul de măsurare a acestor turometre este cuprins între (20 - 10000) rot/min.
Turometrele stroboscopice sunt prevăzute cu o lampă de iluminare, numită lampa stroboscopică sau lampă cu fulger electronic. Lampa emite un flux luminos foarte puternic (107 ÷ 3 · 109 lm) într-un timp foarte scurt (10 ÷ 1000 µs). Este formată dintr-un tub de cuarţ (2), prevăzut la capete cu anodul (2a) şi catodul (2b) şi un electrod de comandă (2c) (fig. 6.6. c). În interiorul tubului se găseşte gaz rarefiat (xenon), care prin ionizare devine luminos. Tensiunea între anod şi catod este suficient de mică încât să nu producă ionizarea gazului din tub. Ionizarea se produce atunci când asupra electrodului de comanda (2c) se aplică un semnal de înalta tensiune. Gazul din tub se ionizează, emite o lumină puternică pe o durată foarte scurtă şi produce descărcarea condensatorului C. După stingerea lămpii se produce încărcarea condensatorului prin rezistenţa electrică R. În timpul măsurării lumina intermitentă produsă de lampa stroboscopică este orientată pe semnul (1a) de pe arborele (1). Se reglează frecvenţa semnalului de comandă până când semnalul de pe arbore rămâne aparent imobilizat (datorita persistenţei imaginii pe retina ochiului).
Între două iluminări arborele se roteşte de N ori. Relaţia între turaţia n şi frecvenţa f1 a iluminărilor este: 160 fNn ⋅⋅= . Prin micşorarea frecvenţei de iluminare se obţine o noua imobilizare aparentă a semnalului, în acest caz arborele se roteşte de N+1 ori între două iluminări succesive. Relaţia între turaţia n şi frecvenţa f2 a iluminărilor este:
2)1(60 fNn ⋅+⋅= . Micşorarea frecvenţei de iluminare se repetă de j ori, până când diferenţa dintre frecvenţa iniţială f1 şi frecvenţa finală f j este suficient de mare. Pentru frecvenţa f j, turaţia este jfjNn ⋅−+⋅= )]1([60 . Prin eliminarea lui N se obţine relaţia de calcul a turaţiei
:
min]/[)1(601
1 rotjff
ffn
j
j −⋅−⋅
⋅= (6.3)
În timpul măsurării, turaţia n a arborelui trebuie să fie constantă.
Turometre cu traductor, au în circuitul electric de măsurare un traductor de tip inductiv sau un traductor cu impulsuri. Turometrele cu traductor inductiv pot fi cu dispozitiv de afişaj analogic sau numeric, iar Turometrele cu traductor de impulsuri au dispozitiv de afişaj numeric.
Traductoarele inductive sunt în general microgeneratoare de curent continuu sau alternativ, numite tahometre. Tahometrele de curent alternativ sunt microgeneratoare sincrone sau asincrone.
Tahometrul de curent continuu produce un curent (semnalul de măsurare) cu tensiunea U0
proporţională cu turaţia n: nkU ⋅=0 , unde k este o constantă care depinde de parametrii
constructivi (numărul perechilor de poli, numărul de spire, fluxul magnetic produs de excitaţie) (fig. 6.7. a). Pe stator (St) este prevăzută excitaţia, în general cu magneţi permanenţi (MP). Rotorul (R) poate fi cilindric, sub formă de disc, sau formă de pahar, pe care este prevăzută înfăşurarea indusă. Semnalul electric este preluat de la colectorul cu perii (Pr). Turaţia minimă care se poate măsura este limitată sensibilitatea traductorului, iar turaţia

64
maximă este limitată de saturaţia miezului magnetic. Domeniul de măsurare este cuprins între (50 ÷ 5000) rot/min.
Tahometrul sincron produce un semnal de măsurare sub forma unui curent alternativ monofazat cu valoarea efectivă a tensiunii U0 şi frecvenţa f proporţională cu turaţia n:
nkU ⋅=0 şi ][60/ Hznf = (fig. 6.7. b). Inductorul este format din magneţi permanenţi (MP) montaţi pe rotor R. Indusul este format dintr-o înfăşurare monofazată (IM) montată în crestăturile statorului (St), confecţionat din tole de oţel electrotehnic. Domeniul de măsurare a tahometrul sincron este cuprins între (100 ÷ 5000) rot/min.
a) b)
0
MP
N
S
N S
N
SN
S
N
S
U0U
St
R
Pr
StIM
R
MP
Figura 6.7. Tahometre
Tahometrul asincron, este un microgenerator polifazat, în general bifazat, format dintr-un rotor în scurtcircuit şi două înfăşurări, una inductoare şi cealaltă indusă montate în crestăturile statorului (confecţionat din tole din otel electrotehnic). Înfăşurarea inductoare este alimentata cu curent sinusoidal, iar în înfăşurarea indusă se induce un curent de aceiaşi frecvenţă cu a curentului de alimentare, dar amplitudinea variază proporţional cu turaţia rotorului. Prin modulaţia amplitudinii se obţine semnalul de măsurare.
Traductoarele de impulsuri produc semnale electrice sub forma de impulsuri, frecvenţa impulsurilor este proporţională cu turaţia. În funcţie de modul de producere a impulsurilor traductoarele cu impulsuri pentru turometre pot fi: cu contact, fotoelectrice, inductive, magnetice, etc.
Traductorul cu contact este format din inele metalice (bronz, cupru) (I1), (I2) montate pe o bucşă (B) din material izolator electric (fig. 6.8. a). Pe circumferinţa inelului I1 sunt fixate echidistant plăcuţe din material izolator (PI). Pe inele sunt prevăzute periile (Pe1) şi (Pe2) din cupru grafitizat, conectate la o sursă de curent continuu. Inelele prin intermediul bucşei (B) se fixează pe arborele (A) a cărei turaţie se măsoară. Turaţia n a arborelui este direct proporţională cu frecvenţa impulsurilor din circuitul electric.
Traductoarele fotoelectrice pot fi cu întreruperea sau cu reflectarea fluxului luminos produs de o sursă de lumină. În momentul activării fotodiodei sau a fototranzistor cu un flux luminos, se produce un impuls electric.
Traductoarele fotoelectrice cu întreruperea fluxului luminos funcţionează pe acelaşi principiu cu traductoarele pentru măsurarea vitezei liniare (fig. 6.5. b). Partea mobilă a traductorului de

65
turaţie este formată dintr-un disc pe care sunt dispuse radial şi echidistant orificii. Discul se montează pe arborele motorului. Atunci când un orificiu al discului trece prin dreptului sursei de lumină elementul fotoelectric produce un impuls electric.
Traductorul cu reflectare este format dintr-o sursă de lumină (SL) şi elementul fotoelectric (EF) (fig. 6.8. b). Pe circumferinţa axului sau arborelui a cărui turaţie se măsoară (disc special în cazul când axul este de dimensiuni mici) se dispun echidistant suprafeţe reflectorizante (în general de forma dreptunghiulară). Suprafeţele (BR) se execută, prin vopsite cu vopsea reflectorizantă sau prin lipire de banda reflectorizanta direct pe arbore sau pe disc în cazul arborilor de dimensiuni mici. Sursa de lumină (SL) şi elementul fotoelectric (EF) sunt dispuse în aşa fel încât, lumina reflectată de suprafaţa (BR) să cadă pe elementul fotoelectric, care produce un impuls electric.
a) b)
τ
eu
eu
n
BR
EF
SL
n
n
Pe1
E
R
I1
I2
Pe2
B PI
n
Figura 6.8. Traductoare de impulsuri cu contact şi fotoelectrice
Domeniul turaţiilor măsurate de turometrele cu traductor fotoelectrice este foarte mare: (1 ÷ 107) rot/min. Se pot măsura turaţii foarte mici, iar afişarea valorilor măsurate se face cu un dispozitiv de afişare numeric.
Traductoarele inductive pentru măsurarea turaţiei pot fi cu reluctanţa variabilă sau cu circuit oscilant. În circuitul electric de măsurare se induc impulsuri cu o frecvenţă proporţională cu valoarea turaţiei.
Traductorul cu reluctanţă variabilă este asemănător cu traductoarele de impulsuri pentru măsurarea vitezei liniare (v. fig. 6.5. a). La traductoarele de turaţie elementul mobil este sub forma unui disc (2) (fig. 6.9. a). Pe circumferinţa discului sunt prevăzute echidistant proeminenţe feromagnetice. În momentul când proeminenţa este în dreptul bobinei (1) (la un capăt al miezului este fixat magnetul (1a)) în aceasta se induce un impuls electric.
Traductorul cu circuit oscilant este format din discul cu fantă (DF), confecţionat din material feromagnetic, care se montează pe axul a cărui turaţie se măsoară (fig. 6.9. b). El se roteşte între bobinele L1 şi L2, care fac parte din oscilatorul de înaltă frecvenţa (1 ÷ 5 MHz) (CO). Dacă partea plină a discului (DF) se găseşte între cele două bobine, atunci se întrerupe cuplajul magnetic dintre ele, oscilatorul se blochează, semnalul la ieşire este de nivel jos. Dacă fanta discului este între cele două bobine semnalul de ieşire este de nivel înalt. Frecvenţa semnalului de ieşire este direct proporţională cu turaţia n a arborelui care se măsoară. Tahometru mai este prevăzut cu un circuit de măsurare (CM) şi un dispozitiv indicator (DI) . Circuitul de măsurare conţine filtru, adaptor, etc. , iar dispozitivul indicator este în general cu afişaj numeric.

66
Traductoare magnetice funcţionează pe baza efectului Hall. Efectul Hall constă în apariţia unei diferenţe de potenţial pe direcţie transversală a unui conductor sau semiconductor prin care circulă curent electric, şi este plasat într-un câmp magnetic normal pe direcţia curentului. Considerăm o banda (B) din material conductiv prin care circulă un curent electric de intensitatea I (fig. 6.10. a). Dacă banda (B) este plasată într-un câmp magnetic cu inducţia B normal pe direcţia curentului, atunci pe direcţie perpendiculară pe planul format de direcţiile curentului şi câmpului magnetic apare o diferenţa de potenţial gBIku /⋅⋅= , unde k constanta Hall; g grosimea benzii. Banda din material conductor sau semiconductor reprezintă elementul sensibil, iar câmpul magnetic se produce de un magnet permanent.
a) b)
eu
nCO
N
2 DF
L2
nS
1 1aL1
CM DI
Figura 6.9. Traductoare de impulsuri inductive
Traductoarele Hall produc semnale electrice de (1 ÷ 10) mV în prezenţa unui câmp magnetic de intensitate redusă ( mT50≈ ). Producerea impulsului se poate realiza în mai multe moduri: prin deplasarea magnetului; prin ecranarea câmpului magnetic şi prin concentrarea câmpului magnetic. Traductorul cu deplasarea magnetului este format dintr-un disc nemagnetic prevăzut pe circumferinţa cu magneţi permanenţi (MP) dispuşi echidistant (fig. 6.10. b). Prin rotirea discului cu turaţia n, magneţii trec succesiv prin dreptul elementului sensibil (ES), care produce un impuls electric.
a)
u NS
B n n n
b) c) d)
NS
+
-+
-+
-+
-+
-
I DF
ES
MP DF ES DF ES
MP MP
Figura 6.10. Traductoare de impulsuri magnetice
Traductorul cu ecranarea câmpului magnetic este format dintr-un disc feromagnetic (DF), elementul sensibil (EF) şi magnetul (MP) (fig. 6.10. c). Discul este prevăzut cu un decupaj

67
mai mare decât suprafaţa activă a elementului sensibil. Elementul sensibil şi magnetul permanent sunt dispuşi de o parte şi de alta a discului (DF). În timpul rotirii discului atunci când decupajul se află în dreptul elementului sensibil, acesta produce un impuls electric; iar atunci când în dreptul elementului sensibil este partea plină a discului, valoarea semnalului este nulă, deoarece câmpul magnetic este ecranat de disc. Semnalul de măsurare este sub forma unui şir de impulsuri electrice.
Traductorul cu concentrarea câmpului magnetic este format tot dintr-un disc feromagnetic (DF) prevăzut cu un decupaj (fig. 6.10. d). Grosimea discului şi lăţimea decupajului trebuie să fie mai mare decât suprafaţa activă a elementului sensibil (EF). Prin rotirea discului atunci când partea plină a discului se află în dreptul elementului sensibil, produce concentrarea fluxului magnetic pe suprafaţa activă a elementului sensibil, acesta produce un semnal de intensitate mare; iar atunci când decupajul discului se află în faţa senzorului semnalul are intensitatea foarte mică, nesesizabil.
Alegea turometrului pentru o anumită aplicaţie depinde de mai multe condiţii: gama de turaţii , timpul de răspuns, eroarea maximă, încărcarea arborelui, etc. Tahogeneratoarele nu se pot folosi la turaţii foarte mici sau la turaţii foarte mari. Dispozitivul indicator poate fi cu vizualizarea sau înregistrarea curbei de variaţie a turaţiei. Turometrele cu traductoare de impulsuri au o gamă de turaţii foarte mare (inclusiv turaţii foarte mici) şi precizie bună. În general, la aceste turometre dispozitivul indicator este cu afişaj numeric, conversia analog-numerică a semnalului de măsurare nu este necesară.
6.3. Măsurarea parametrilor cinematici ai fluidelor
Măsurarea parametrilor cinematici se referă la un curent de fluid unidirecţional, care curge prin conductă sub presiune. Direcţia şi valoarea vitezelor în secţiunea de măsurare la un moment dat se consideră constante.
Viteza curentului de fluid se poate măsura prin metoda presiunii de impact, prin metode electrice sau optice. Alegerea metodei de măsurare a vitezelor depinde de natura fluidului (gaz, lichid), starea termică, etc.
Măsurarea vitezei prin metoda presiunii de impact se face cu ajutorul unui captor numit tub Pitôt-Prandtl. Captorul este un tub dublu îndoit (montat concentric) în forma de L . Partea centrală a tubului comunică cu fluidul printr-un orificiu de capăt (PT) numit priză de presiune totală, iar partea exterioară comunică cu fluidul prin orificii laterale (PS) numite priză de presiune statică (fig. 6.11. a). În punctul (PT) numit şi punct de impact viteza fluidului este nulă 0=PTw , iar presiunea este pt numită presiune totală. De asemenea, în orificiile (PS) fluidul are viteza nulă şi presiunea ps numită presiune statică. Diferenţa
std ppp −= se numeşte presiune dinamica sau presiune de impact. Viteza w a curentului de
fluid în punctul de măsurare, este direct proporţională cu radicalul presiunii dinamice
dpkw ⋅= . Constanta k depinde de densitatea fluidului şi numărul Mach M (regim
subsonic). La fluidele incompresibile constanta k depinde numai de densitatea fluidului. Aparatul de măsură este format din tubul Pitôt-Prandtl, şi un manometru diferenţial (cu tub U sau combinat). Se montează pe conducta în secţiunea de măsurare. Aparatul măsoară viteza într-un punct al secţiunea de măsurare.
Anemometria este cea mai cunoscută metodă electrică pentru măsurarea vitezei (în special la gaze). Metoda se bazează pe dependenţa vitezei de curgere faţă de schimbul convectiv de căldură între fluid şi un corp cald. Schimbul de căldură creşte direct proporţional cu creşterea vitezei de curgere.

68
Traductorul numit anemometru este format din doi suporţi (Sp) din oţel inoxidabil, la capătul cărora se fixează firul cald (Fc). Firul cald este confecţionat din material metalic (tungsten, platină, aliaj Pt-Ir) de lungime (1 ÷ 2) mm, diametru (5 ÷ 25) µm (fig. 6.11. b). Firul (Fc) se poate înlocui cu o peliculă de platină depus pe un suport de sticlă sau cuarţ. Semnalul de măsurare are valoarea maximă dacă firul cald este perpendicular pe direcţia curentului de fluid ( °= 90α ). În felul acesta, se poate determina şi direcţia curentului de fluid. Traductoarele cu două sau trei fire perpendiculare între ele, se pot folosi la măsurarea turbulenţei după două sau trei direcţii (fig. 6.11. c).
În timpul măsurării prin firul (Fc) trece un curent de intensitate I f. Rezistenţa Rf variază în funcţie de temperatură, iar acesta este în funcţie de intensitatea schimbului convectiv de căldură între fir şi fluid. Cu cât viteza w a curentului de fluid este mai mare cu atât intensitatea schimbului de căldură este mai mare. La echilibru termic, căldura cedată de rezistentă în unitate de timp este ff RI ⋅2 , care este funcţie de viteza w a curentului de fluid. Daca se
menţine constantă intensitatea I f, atunci viteza curentului este funcţie de rezistenţa firului )( fRfw = , iar daca se menţine rezistenţa constanta, atunci viteza curentului este funcţie de
intensitatea curentului )( fIfw = .
a)
0
b) c) d)
FcSp
PSPT
p
w
tp
90°
α
w d
Fc
Sp
w w
E2
E1E3
Figura 6.11. Captoare şi traductoare pentru măsurarea vitezei
Circuitul electric al aparatului de măsurare este cu punte Wheatstone, traductorul constituie unul din braţele punţii. Semnalul de măsurare este sub formă de variaţie de tensiune, cules pe diagonala punţii.
Anemometrul cu scânteie electrică este format din trei electrozi (E1), (E2) şi (E3) (fig. 6.11. d). Electrozii (E1) şi (E2) sunt conectaţi cu o anumita frecvenţă la o tensiune mare de curent electric (intensitate mică). Arcul electric dintre electrozi produce ionizarea fluidului din jurul electrozilor, iar în electrodul (E3) apare un salt de tensiune electrică. Viteza w a fluidului este în funcţie de timpul τ scurs între momentul declanşării arcului electric şi apariţia saltului de tensiune electrică în electrodul (E3). Metodele optice cele mai folosite pentru măsurarea vitezei fluidului sunt, metodele de vizualizare cu trasori. Trasorii sunt particule foarte fine (nu se dizolvă şi au aceiaşi densitate cu a fluidului) aflate în suspensie în fluid. Viteza fluidului este egală cu viteza particulelor, care se determină prin fotografiere succesivă la intervale egale de timp, de durată foarte mică.

69
Măsurarea debitului se face cu aparate numite debitmetre. Debitul reprezintă cantitatea de fluid care trece prin secţiunea unei conducte în unitate de timp. În funcţie cum se exprimă cantitatea de fluid, avem debit de volum, ]/[/ 3 smwAddVQ mv ⋅== τ şi debit de masă,
]/[/ skgQddmQ vm ⋅== ρτ unde: A este secţiunea conductei în [m2]; wm este viteza
medie, în [m/s]; ρ este densitatea fluidului, în [ kg/m3] în secţiunea conductei.
în concluzie, măsurarea debitului de volum se reduce la măsurarea vitezei medii wm, iar a debitului de masa se reduce la măsurarea vitezei medii wm şi a densităţii ρ. Principalele metode de măsurare a debitului sunt: cu restricţie de curgere; cu mişcarea unui element mobil; volumetrică, etc.
Metoda de măsurare cu restricţie de curgere se bazează pe dependenţa debitului faţă de căderea de presiune în restrictor. Elementul sensibil a acestor aparate poate fi: diafragmă (fig. 6.12. a), ajutaj (fig. 6.12. b) şi tub Venturi (fig. 6.12. c). Debitul măsurat este funcţie de căderea de presiune 21 ppp −=∆ produsă de restrictor, ]/[/2 3 smpAcQ dv ρ∆⋅⋅⋅= ,
unde: cd este coeficientul de curgere, A este secţiunea conductei în [m2]; ρ este densitatea fluidului, în [kg/m3].
a)
1
b) c)
p 2p
A
diafragma
1p 2p
diafragma
A
1p2p
Figura 6.12. Restrictori pentru măsurarea debitului
Aparatul de măsurat este format din elementul sensibil şi un manometru diferenţial. Dispozitivul indicator a manometrului indică direct valoarea debitului măsurat şi poate fi şi cu afişaj numeric.
Metoda de măsurare cu mişcarea unui element mobil se bazează pe dependenţa debitului faţă de forţa hidrodinamică sau aerodinamică ce acţionează asupra elementului mobil al senzorului, numit rotametru. Rotametrele se clasifică în funcţie de tipul părţi mobile în: rotametru cu plutitor, rotametru cu piston, rotametru cu paletă, rotametru cu turbina, etc.
Rotametru cu plutitor este format din tubul tronconic (TT) , confecţionat din material transparent şi plutitorul (PT) (fig. 6.13. a). Secţiunea tubului tronconic se alege în aşa fel încât, debitul să varieze liniar în funcţie de poziţia plutitorului h. Pe tub este imprimată scara gradată în unităţi de debit.
Rotametru cu piston este format din pistonul (P), care este menţinut în dreptul secţiunii minime de arcul (Ar) (fig. 6.13. b). Sub acţiunea forţei hidrodinamice a fluidului, pistonul se deplasează într-un sens sau altul în funcţie de sensul de curgere a fluidului. Debitul este în funcţie de poziţia h a pistonului. Aparatul de măsura mai este prevăzut cu un traductor de deplasare, circuitul electric de măsurare şi dispozitivul indicator.

70
Rotametru cu paletă este format din paleta articulată (Pa), care sub acţiunea curentului de fluid se roteşte cu unghiul θ (fig. 6.13. c). Debitul este în funcţie de unghiul de înclinare a paletei θ. Deplasarea paletei poate fi transformată printr-un traductor în semnal electric de măsurare.
e)
n
Td TR Td TA
h
PPT
θa) b) c) d)
Ar PaTT
Figura 6.13. Rotametre pentru măsurarea debitului
Rotametru cu turbină poate fi cu turbină radială (fig. 6.13. d) sau cu turbină axială (fig. 6.13. e). Debitul de fluid este funcţie de turaţia rotorului turbinei (TR) sau (TA) . Semnalul de măsurare este sub forma unor impulsuri electrice produse de traductorul (Td). Valoarea debitului măsurat este direct proporţională cu frecvenţa impulsurilor electrice produse de traductor.
Metoda de măsurare volumetrică se bazează pe dependenţa debitului faţă de turaţia unui motor hidraulic. Elementul sensibil al aparatului de măsurat poate fi un motor hidraulic cu roţi dinţate, cu lobi, cu roţi ovale, cu palete glisante, etc. Mărimea de ieşire a elementului sensibil (turaţia) poate fi transformată printr-un traductor de turaţie în semnal electric de măsurare.

71
C7. Aparate şi metode de măsurare a forţei şi momentului
Metodele de măsurare a forţei sau a momentului se bazează pe efectele care se produc în timpul interacţiunii corpurilor. Principale efecte de interacţiune între captor şi corp folosite la măsurarea forţei sau a momentului sunt: deformaţia corpului, presiune, efect electric, efect magnetic.
Legătura între forţa de interacţiune ( ]/[ 2mNσ - efort unitar) şi deformaţia corpului ( ]/[ mmµε - deformaţie specifică) pe care o produce asupra unui corp solid (bară) solicitat la întindere sau compresiune este dată de legea lui Hooke: εσ ⋅= E , unde: E este modulul de elasticitate al barei, în ]/[ 2mN . Legătura între momentul M şi deformaţia unghiulară θ între două secţiuni situate la distanţa l, pe care îl produce asupra unui corp solid (arbore) solicitat la răsucire (torsiune), este dată următoarea relaţie: lIGM p θ⋅⋅= , unde: G este modul de
elasticitate transversal al arborelui, în ]/[ 2mN ; I p este momentul de inerţie polar, în [m4] (fig. 7.1. a).
a) b) c)
0
M
R1 uM
l
θ
M
45°
45°
R2R4R3
R1R2
R4R3
Meu
R1
R4
R2
R3
Figura 7.1. Metode de măsurarea a momentului
Măsurarea forţei sau a momentului se poate face prin aplicarea mărcilor tensometrice direct pe piesele maşinii, numită metodă de măsurare directă (v. fig. 5.6.), sau prin intermediul unui aparat de măsurare. Aparatul pentru măsurarea forţei se numeşte dinamometru, iar aparatul pentru măsurarea momentului se numeşte torsiometru. Momentul de torsiune sau de răsucire a unui arbore se poate măsura şi prin metoda suspendării elastice.
7.1. Metoda de măsurarea directă
Pentru măsurarea momentul de torsiune prin metoda directă, mărcile tensometrice se dispun înclinate la 45° faţă de axa de rotaţie a arborelui, deoarece pe aceasta direcţie se produc tensiuni de întindere sau comprimare egale cu cele de răsucire (fig. 7.1. b). Conectarea mărcilor se face într-un circuit electric de măsurare cu punte Wheatstone (fig. 7.1. c). Puntea este alimentată de la o sursa de curent continuu la tensiunea U0, iar semnul de măsurare are tensiunea Ue. Legătura electrică între mărcile aplicate pe arborele în mişcare de rotaţie şi instalaţia de alimentare şi circuitul de măsurare se realizează cu un conector cu contacte alunecătoare (format din inelele din alamă şi perii din cupru sau argint grafitat), prin cuplaj magnetic, sau prin teletransmisie.

72
7.1.1. Dinamometre
Dinamometrele sunt aparate pentru măsurarea a forţei. Se clasifică după tipul captorului în: dinamometre mecanice, dinamometre hidraulice, dinamometre piezoelectrice, dinamometre inductive, etc.
Dinamometrul mecanic este prevăzut cu un captor elastic. Deformaţia captorului reprezintă semnalul de măsurare. Transmiterea semnalului de măsurare la dispozitivul indicator se poate face printr-un sistem mecanic (dispozitiv de afişare cu scară gradată şi ac indicator) sau prin intermediul unui traductor (mărci tensometrice, inductiv, capacitiv, etc.), care transformă deformarea într-un semnal electric de măsurare. Forma captorului depinde de mărimea şi sensul forţei. Captorul pentru forţe mici este în general sub formă de lamelă încastrată la un capăt, pentru forţe mijlocii este sub forma de inel, iar pentru forţe mari este sub forma de bară.
Dinamometrul cu lamelă poate fi prevăzut cu patru mărci tensometrice identice R1=R2=R3=R4. Mărcile R1, R3 sunt supuse la întindere iar mărcile R2, R4 sunt supuse la compresiune (fig. 7.2. a). Cele patru mărci se montează în punte realizând un semnal amplificat şi compensat termică (fig. 7.2. f).
euR1
R4
R2
R3
e)d)c)b)a)
F
F F F
F
F
F
R3
R2 R4
R1 R3
R2 R4
R3 R1 R3R2,R4
R3
f)
0R1
u
R2R4
R1R1
R2,R4
Figura 7.2. Dinamometre mecanice cu mărci tensometrice
Dinamometrul cu inel pentru forţe de întindere (fig. 7.2. b) sau de compresiune (fig. 7.2. c), este prevăzut cu patru mărci tensometrice identice montate pe partea interioară şi exterioară. Mărcile se conectează în punte (fig. 7.2. f), se obţine un semnal electric amplificat şi compensat termic.
Dinamometrele cu bară sunt prevăzute două mărci tensometrice active R1, R3 şi două mărci pasive tensometrice R2, R4 pentru compensare termica (fig. 7.2. d, e). Conectarea mărcilor se face în punte Wheatstone (fig. 7.2. f).
Dinamometrul hidraulic este format din cilindrul (C) şi pistonul (P) (fig. 7.3. a). În camera închisă de piston se găseşte lichid hidraulic. Sub acţiunea forţei presiunea lichidului hidraulic creşte proporţional cu forţa F. Ea se măsoară cu manometru (M) , care are scara gradată în unităţi de forţă.
Dinamometrul piezoelectric este format din traductorul piezoelectric (TP), montat în carcasa (C) (fig. 7.3. b). Sub acţiunea forţei traductorul generează un curent electric de tensiune ue proporţional cu forţa F. Curentul electric generat de traductor reprezintă semnalul de măsurare.
Dinamometrele piezoelectrice sunt folosite în general la măsurarea forţelor dinamice, care pot varia cu frecvente foarte mari, până la 109 Hz. Au o liniaritate bună şi nu sunt influenţate de temperatură.

73
Dinamometrul inductiv este un traductor inductiv bazat pe efectul magnetostrictiv invers, format din circuitul magnetic (CM) şi bobina (B) (fig. 7.3. c). Sub acţiunea forţei asupra corpurilor feromagnetice, circuitul magnetic îşi modifică permeabilitatea magnetică (efect magnetostrictiv) şi în mod corespunzător inductanţa bobinei L. Cu aceste dinamometre se pot măsura forţe dinamice, sensibilitatea şi stabilitatea lor este mare.
ue
a) dinamometru hidraulic b) dinamometru piezoelectric c) dinamometru inductiv
+ + + + + + + + C
P
M
F
F
F
C
TP+ + + + + + + +
- - - - - - - - - - - - - - - - B
CM
L
Figura 7.3. Dinamometre
7.1.2. Torsiometre Torsiometrele sunt aparate pentru măsurarea momentului transmis între doi arbori. Sunt formate dintr-un captor sub forma unui arbore şi un traductorul care transformă deformaţia arborelui în semnal electric de măsurare. Pentru momente de valori mici, elementul sensibil este sub formă de bandă solicitată la încovoiere.
Torsiometrele se clasifică în funcţie de tipul traductorului, în: torsiometre cu mărci tensometrice, torsiometre cu traductor inductiv, torsiometre cu traductor cu impulsuri, etc.
Torsiometrul cu mărci tensometrice este format din arborele (A) montat în carcasa (C) (fig. 7.4. a). Pe arbore se montează mărcile tensometrice în punte completă. (v. fig. 2.45. c). Semnalul de măsurare este teletransmis printr-un sistem electronic format din bateria (B), oscilatorul (O), emiţătorul (E), antena de emisie (AE), antena de recepţie (AR), receptorul (R) şi dispozitivul indicator (DI) . Bateria, oscilatorul, emiţătorul şi antena de emisie sunt fixate pe arbore. Prin teletransmisia semnalului de măsurare se evita influenţele negative ale contactelor alunecătoare.
Torsiometrul inductiv este prevăzut cu două traductoare inductive cu miez mobil. Bobinele traductoarelor se montează pe discul (D1) diametral opus, conectate în punte completă (fig. 7.4. b). În felul acesta, se compensează efectele variaţiei de temperatură. Pe discul D2 se montează tijele de legătură cu miezurile magnetice (M) . Discurile sunt dispuse la distanţa l. Sub acţiunea momentului M arborele dintre discuri se deformează cu unghiul θ. Alimentarea punţii şi transmiterea semnalului de măsurare se face prin cuplaj magnetic. Transformatorul de alimentare (TA) şi transformatorul de recepţie are una din bobine asamblate pe arbore (bobina rotitoare) iar cealaltă este fixată de carcasa (C). Schema de conectare a bobinelor de la traductoare cu bobinele transformatoarelor este redată în figura 7.4. c.

74
Torsiometru cu impulsuri este format din discurile (D1) şi (D2) montate fix pe arborele (A) (fig. 7.4. d). Discurile sunt prevăzute cu proeminenţe din material feromagnetic. În timpul rotirii arborelui, în bobinele (B1) şi (B2) se induce un tren de impulsuri electrice. Bobinele sunt astfel amplasate încât la momentul iniţial, cele două trenuri de impulsuri electrice sunt defazate cu o jumătate de perioadă (proeminenţele feromagnetice ale discurilor sunt dispuse diametral opus). La creşterea momentului, creşte şi defazarea celor două trenuri de impulsuri electrice. Valoarea momentului este direct proporţională cu defazarea şirului de impulsuri electrice generat de traductor.
0u
euL4
d)c)b)a)
TR
L3
L1
L2
TAM
M
u1B1
u2B2
D1
D2
l
C A
lACTAD2L4L1TR
L3ML2D1
O EB
E
n
AR
AECPTA
DI
Figura 7.4. Torsiometre
7.2. Metoda de măsurarea prin suspendare elastică
Metoda măsurării prin suspendare elastică constă în determinarea momentului reactiv produs de maşina de lucru (ML) asupra maşinii motoare (MM) (fig. 7.5.). Momentul motor determină o încărcare inegală în punctele de sprijin a celor două maşini. Din condiţia de echilibru aFM ⋅= , rezultă că, momentul se poate determina prin măsurarea forţei F dacă se cunoaşte distanţa a. Măsurarea forţei F din reazeme se poate face, cu mărci tensometrice (MT) (fig. 7.5. a), cu traductor inductiv diferenţial (fig. 7.5. b), etc.
a) b)
F
L1
u
u
MM
ML
F/2
F/2
MTM
e
0
L3
L2
L4
F
a
Figura 7.5. Metoda de măsurarea prin suspendare
Avantajul principal al metodei de măsurare prin suspendare elastica este faptul că, măsurătorile se aplică pe părţile fixe, nu sunt necesare măsuri speciale pentru transmiterea semnalului de măsurare.

75
C8. Aparate şi metode de măsurare a vibraţiilor şi zgomotului
Prin intensificarea regimului de lucru a maşinilor se amplifică şi fenomenele dinamice cum sunt vibraţiile şi zgomotele. În cuplele cinematice de la mecanisme se produc procese dinamice de tipul frecărilor, ciocnirilor şi şocurilor, care provoacă vibraţii într-un domeniu larg de frecvenţe. Vibraţiile se transmit de la organele maşinii la mediul înconjurător sub formă de unde acustice, creând în jurul maşinii un câmp acustic complex, numit zgomot.
8.1. Măsurarea vibraţiilor Vibraţiile sunt oscilaţii mecanice (energia cinetică se transformă în energie potenţială şi invers cu o anumită frecvenţă), care se produc datorită unor perturbaţii mecanice, şi se propagă în medii elastice sau cvasielastice, sub formă de unde elastice. În mediu solid undele elastice se pot propaga atât sub formă de unde longitudinale (oscilează pe direcţia de propagare) cât şi sub formă de unde transversale (oscilează perpendiculară faţă de direcţia de propagare), iar în mediu fluid se propagă numai sub formă de unde longitudinale.
După metoda de măsurare, aparatele pentru măsurarea vibraţiilor se clasifică în două categorii: a) aparate cu punct fix; b) aparate seismice. Aparatele cu punct fix măsoară mişcarea de vibraţie a corpului faţă de un reper fix, iar aparate seismice măsoară mişcarea relativă faţă de un sistem oscilant cu masă, legat de corpul care vibrează. În majoritatea cazurilor, pentru măsurarea vibraţiilor de la maşini se folosesc aparate de măsură de tip seismic.
Captorul de tip seismic este un sistem oscilant cu masă de ordinul II, cu un singur grad de libertate, montat într-o carcasă solidară cu corpul supus măsurării. Captorul pentru măsurarea vibraţiilor de translaţie este format din masa m suspendată de carcasă (Cr) printr-un arc cu constanta k. Mişcarea ye este amortizată printr-un amortizor cu constanta c (fig. 8.1. a).
Sub acţiunea forţelor de inerţie şi a altor perturbaţii mecanice în corpul (C) se produc vibraţii, caracterizate prin deplasarea )(τy . Vibraţiile din corpul (C) se transmit prin
carcasă (Cr) la masa m a captorului. Vibraţia masei m pe direcţia )(τey este dată de ecuaţia:
2
2
2
2
τττ d
ydmyk
d
dyc
d
ydm e
ee ⋅−=⋅+⋅+⋅ (8.1)
Valoarea ye a semnalului de ieşire a captorului depinde de parametrii aparatului de măsură, masa m, şi constantele c şi k. În funcţie de raportul acestor parametrii se disting trei tipuri de captori:
a) Vibrometru seismic, este caracterizat prin valori mari a rapoartele m/c şi m/k (amortizare şi resort slab). Termenii c şi k din ecuaţia (8.1) se pot neglija, rezultă:
yysaud
yd
d
yde
e −≅−≅2
2
2
2
ττ (8.2)
Masa m rămâne fixă faţă de carcasa (Cr) iar semnalul de ieşire ye a captorului reprezintă deplasarea y a corpului (C). b) Velocimetrul, este caracterizat prin amortizare foarte puternica, constanta c are valoare mare, valorile m şi k se pot neglija. Ecuaţia (8.1) devine:
τττ d
dy
c
myesau
d
ydm
d
dyc e ⋅−≅⋅−≅⋅
2
2
(8.3)

76
Semnalul de ieşire ye a captorului numit velocimetru este proporţional cu viteza (dy/dz) a corpului supus măsurării (C). c) Acceleratorul seismic este caracterizat prin constanta arcului k mare, iar valorile m şi
c se pot neglija. Din ecuaţia (8.1), rezulta:
2
2
2
2
ττ d
yd
k
mysau
d
ydmyk ee ⋅−≅⋅−≅⋅ (8.4)
Semnalul de ieşire ye a acceleratorului seismic este direct proporţional cu acceleraţia ( 22 / τdyd ) a corpului supus măsurării (C).
a) b)
em
ak
C
y
y
Mk m
I
ϕ
r
Cr C
Figura 8.1. Captori pentru aparate de tip seismic
Captorul pentru măsurarea vibraţiilor de torsiune este format din masa m cu momentul de inerţie I , legata de corpul (C) prin arcul (arc bara de torsiune) cu constanta k (fig. 8.1. b). Mişcarea unghiulara φ este amortizată printr-un amortizor cu constanta c. Sub acţiunea momentului variabil M şi a altor perturbaţii mecanice în corpul (C) se produc vibraţii, care se transmit la captor. Vibraţia φ(τ) a masei captorului m este dată de ecuaţia:
2
2
2
2
τϕϕ
τϕ
τϕ
d
dIk
d
da
d
dI ⋅−=⋅+⋅+⋅ (8.5)
În funcţie de raportul parametrilor I , a, k, semnalul de ieşire a captorului este direct proporţional cu deplasarea unghiulara φ, cu viteza unghiulara ( τϕ dd / ), sau cu acceleraţia
unghiulara ( 22 / τϕ dd ) a corpului (C).
În general aparatele pentru măsurarea vibraţiilor sunt cu traductor, care transformă semnalul de ieşire a captorului în semnal electric de măsurare.
Vibrometrul seismic este prevăzut în general cu traductoare de tip parametric (rezistive, inductive, sau capacitive). Semnalul de măsurare este proporţional cu deplasarea corpului care vibrează.
Vibrometrul cu marcă tensometrică este format din lamelă elastică L, la capătul căreia este fixată masa m (fig. 8.2. a). Pe lamela este fixată marca tensometrică (MT) . Ansamblul lamelă-masă vibrează într-o baie de ulei siliconic, care realizează amortizarea mişcării.

77
Vibrometrul inductiv cu reactanţă variabilă este format dintr-un circuit magnetic prevăzut cu bobina B (fig. 8.2. b). Inductanţa bobinei variază proporţional cu deplasarea ye a masei m.
Vibrometrul capacitiv este prevăzut cu traductor capacitiv C (fig. 8.2. c). Capacitatea condensatorului este în funcţie de distanta δ dintre armături.
C
MT
L
m
a
yem
k a
B
k a
m
Cd
ye ye
a) b) c)
Figura 8.2. Vibrometre cu traductor
Velocimetrul cu traductor electromagnetic este format din magnetul permanent (MP) şi bobina (B) (fig. 8.3. a). Mişcarea magnetului determină inducerea în bobina B a tensiunii ue, proporţională cu viteza de vibraţie.
k a
SS Nu
y
B MP
y
a
mEPE m y
EPE EPE
m
a) b) c) d)
e
e
e e
Figura 8.3. Velocimetre şi accelerometre cu traductor
Accelerometrul seismic este prevăzut în general cu traductor piezoelectric. Traductorul piezoelectric generează semnalul de măsurare. Schema de funcţionare este prezentată în figura 8.3. b. Elementul piezoelectric (EPE) este comprimat între corpul care vibrează şi masa m, acesta generează sarcini electrice proporţionale cu acceleraţia de vibraţie. În figura 8.3. c este prezentată schema constructivă a accelerometrului pentru măsurarea vibraţiilor de compresiune. Elementul piezoelectric (EPE) este fixat între corpul accelerometrului şi masa vibratoare m. Plăcuţele piezoelectrice au şi rolul de element elastic, şi de amortizare. În figura 8.3. d este prezentată schema constructivă a accelerometrul pentru măsurarea vibraţiilor de torsiune. Elementul piezoelectric (EPE) are şi rolul de element elastic şi de amortizare.

78
8.2. Măsurarea nivelului de zgomot
Zgomotul este produs de vibraţiile acustice care provoacă senzaţii sonore neplăcute omului. Nivelul zgomotului se poate evalua prin următoarele mărimi: a) intensitatea acustică Ia; b) nivelul de presiune acustică Rp; c) nivelul de putere acustic Rw; d) nivelul de tărie.
Intensitatea acustică reprezintă fluxul de energie acustică care străbate unitatea de suprafaţă, perpendiculară pe direcţia de propagare a zgomotului. Valoarea intensităţii I a se determină cu relaţia:
]/[1
lim 2
2
0mW
c
pdwpI sa ⋅
=⋅⋅⋅= ∫∞→ ρτ
ττ
τ (8.6)
unde: p este presiunea acustică a undelor sonore, în N/m2; ws este viteza de propagare a undei
sonore, în m/s; p este valoarea medie a presiunii acustice pe intervalul de timp τ, în N/m2; ρ este densitatea mediului de propagare, în kg/m3; c este viteza sunetului în mediul de propagare, în m/s.
Valoarea intensităţii acustice a undelor sonore pe scara logaritmica RI se exprimă în decibeli (dB) şi este dată de următoarea relaţia:
][lg100
dBI
IRI ⋅= (8.7)
unde: I este intensitatea acustică a undelor sonore, în W/m2; I 0 este intensitatea acustică de referinţă a undelor sonore ( 212
0 /10 mWI −= ).
Nivelul de presiune acustică RP se determină cu relaţia:
][lg20lg20lg1000
20
2
dBp
p
p
p
p
pRp ⋅≅⋅=⋅= (8.8)
unde: p este presiunea acustică a undelor sonore, în N/m2; p0 este presiunea acustică de referinţă a undelor sonore ( 25
0 /102 mNp −⋅= ).
Nivelul de putere acustică RW se determină cu relaţia:
][lg100
dBP
PRW ⋅= (8.9)
unde: P este puterea acustică a undelor sonore, în W; P0 este puterea acustică de referinţă a undelor sonore ( WP 12
0 10−= ).
Nivelul de tărie este dat de senzaţia auditivă produsă de zgomot. Tăria zgomotului variază de la "slab" la "puternic", şi este în funcţie de nivelul presiunii acustice şi frecvenţă. Organul auditiv este mai puţin sensibil la zgomote de frecvenţe joase. De exemplu, două zgomote cu aceeaşi presiune sonoră sunt percepute diferit dacă frecvenţa lor diferă. Zgomotul de frecvenţă mai mare are nivelul de tărie mai mare decât zgomotul de frecvenţă mai mică.
Unitatea de măsură a nivelului de tărie a zgomotului este fonul (f). Un fon reprezintă un sunet pur cu frecvenţa de 1000 Hz, şi produce un nivel de presiune acustica de 1 dB. Nivelul de

79
tărie se poate exprima şi în soni (S). Un son reprezintă un sunet pur cu frecvenţa de 1000 Hz şi cu nivelul de tărie a zgomotului de 40 f. Relaţia dintre scara sonilor S şi a fonilor f este:
10
40
2−
=f
S (8.10)
unde: f este nivelul de tărie exprimat în foni.
Măsurarea nivelului de zgomot se face cu un aparat numit fonometru. Fonometrul măsoară nivelul intensităţii zgomotului. Elementul sensibil al fonometrului este un microfon în general cu condensator electric. Condensatorul transformă sunetele într-un semnalul de măsurare. Aparatul de măsură mai cuprinde un circuit electric de măsurare, şi un dispozitiv cu ac indicator şi cadran gradat în decibeli, sau un dispozitiv înregistrator. Circuit electric de măsurare cuprinde un amplificator, şi un set de filtre ponderatoare.
Microfonul este un traductor electroacustic, care transforma sunetul într-un semnal electric. Traductorul este tip capacitiv format din membrana elastica (Me) şi armătura fixa (Af) (fig. 8.4. a). Membrana reprezintă armatura mobilă a condensatorului, confecţionată din folie metalică foarte subţire (0,0025 ÷ 0,05) mm. Sub influenţa presiunii produsă de undele sonore, membrana se deformează, distanţa dintre cele două armături se modifică. Tensiunea ub a sursei asigură polarizarea traductorului, iar semnalul de ieşire ue este proporţional cu nivelul intensităţii zgomotului. Semnalul de ieşire a microfonului ue are valoare redusă, el este amplificat de către un amplificator de curent alternativ. Filtrele ponderatoare filtrează semnalul de măsurare la un anumit nivel izofonic, deoarece perceperea zgomotului este în funcţie de frecvenţa oscilaţiei şi de presiunea undelor sonore.
în figura 8.4. b este prezentată schema constructivă a microfonului pentru aparatul de măsurare a nivelului de zgomot. Membrana elastică (Me) este fixată tensionat de carcasa (C) a microfonului. Armatura fixă (Af) este fixată pe placa de cuarţ (PC), care o izolează electric. Ea este prevăzută cu orificii pentru amortizarea mişcării membranei. Pentru egalizarea presiunii interioare cu cea exterioară în carcasa microfonului este prevăzut orificiul capilar (Oc).
ueR
Af Me
R
PC
Me
Af
Oc C
a) b)
us
ue
us
Figura 8.4. Schema microfonului
Aparatul de măsură este prevăzut cu patru circuite de filtrare distincte, cu caracteristici normalizate pe plan mondial, notate cu A, B, C şi D. Caracteristica A este utilizată pentru măsurarea zgomotelor cu nivelul de tărie sub 55 foni, caracteristica B pentru nivele cuprinse între 55 şi 85 foni, caracteristica C pentru nivele cuprinse între 85 şi 100 foni, iar caracteristica D pentru nivele de tărie care depăşesc 100 foni. Valorile măsurate de aparat trebuie însoţite şi de filtru folosit: dB(A), dB(B), dB(C) sau dB(D). De exemplu, decibelul

80
A dB(A) este folosit la măsurarea zgomotelor cu nivel sonor normal, decibelul D dB(D) este folosit la măsurarea zgomotelor produse de motoarele de avion.
Măsurarea zgomotului produs de maşini se face în camere special construite (cameră anechoică). Pereţii camerei anechoică se execută din materiale speciale şi de formă adecvată pentru a absorbi total energia undelor de presiune incidente, care ar putea produce erori de măsurare. De asemenea, nivelul zgomotului emis de mediul ambiant trebuie să fie mai mic de 10 dB, în caz contrar valorile măsurate trebuie corectate în mod corespunzător.
Pentru determinarea surselor de zgomot din maşină se folosesc aparate speciale de măsurare a zgomotului, numite analizatoare de zgomot. Analizatorul de zgomot este un fonometru special prevăzut cu o serie de filtre care nu lasă să treacă decât zgomote care au o anumită bandă de frecvenţă.
Identificarea surselor de zgomot produse de maşini este o operaţie foarte complexă şi laborioasă. Se fac măsurări privind nivelul de zgomot, şi măsurări privind vibraţiile, produse de diverse elemente ale maşinii. Analiza mişcării de vibraţie corelate cu înregistrările sonore, permite stabilirea contribuţiei fiecărui element la zgomotul total produs de maşină.

81
C9. Standuri de încercare şi experimentare
Încercarea sau cercetarea experimentară a motoarelor se face pe o instalaţie specială denumită stand sau banc de încercare. Pe cadrul standului se fixează motorul, frâna şi aparatele de măsură şi control. Frâna este un dispozitiv care produce un moment rezistent egal cu momentul efectiv dezvoltat de motor. Lucrul mecanic dezvoltat de motor este disipat de frână sub forma de energie termică. Aparatele de măsură şi control măsoară valoarea unor parametrii ai motorului.
Rezultatele măsurătorilor sunt prezentate sub forma unor curbe reprezentate grafic, numite caracteristici. Caracteristica reprezintă curba de variaţie a unei mărimi de performanţă a motorului (putere, moment motor, consum de combustibil, etc.) în funcţie de un parametru de regim (turaţie, sarcina) sau de un parametru de reglaj. Caracteristicele motoarelor se determină experimental pe standuri de încercare prin metodici standardizate, şi se împart în mai multe clase: a) caracteristici de reglaj; b) caracteristici de pierderi; c) caracteristici de sarcină; d) caracteristici de turaţie; e) caracteristici diverse.
9.1. Frâne pentru standuri de încercare
Frânele se clasifică după modul de realizare a momentului rezistent: a) frâne cu frecare, şi b) frâne electrice. Frânele cu frecare sunt de tip mecanic (cu bandă, cu saboţi sau cu discuri), aerodinamice, şi hidraulice. Frânele electrice sunt: de curent continuu, de curent alternativ, şi electromagnetice. Pentru standurile de încercare se folosesc în general frâne de tip hidraulic sau de tip electric. Caracteristica acestor frâne )(nfM r = unde: Mr este
momentul de frânare; n este turaţia, este o parabolă 2nkM r ⋅= .
9.1.1. Frânele hidraulice
Frânele hidraulice sunt cele mai folosite la încercarea motoarelor termice. Ele dezvoltă momentul rezistent şi realizează disiparea energiei mecanice prin frecarea produsă între elementele active şi apa care curge prin carcasa frânei. Elementele active se fixează pe două componente de bază: pe partea mobilă numită rotor, şi pe partea fixă numită stator sau carcasă. Prin frecarea lor cu apa se dezvoltă momentul rezistent. Se clasifică în funcţie de forma elementelor active, în: a) frâne cu discuri; b) frâne cu buloane; c) frâne cu cupe.
Frâna cu discuri este formată din rotorul (1), carcasa (2), care este suspendată pe suporţi (3) (fig. 9.1. a). Pe rotor se fixează discurile (1a) iar pe stator discurile (2a). Apa (rece) intră în carcasă prin pâlnia (2b) şi iese (apă caldă) prin conducta (2c), prevăzută cu robinetul (2d). În timpul mişcării rotorului, apa din interiorul carcasei este antrenată într-o mişcare de rotaţie. Prin frecarea apei cu discurile şi pereţii carcasei se produce un moment rezistent, care tinde să rotească carcasa în acelaşi sens cu a rotorului. Valoarea momentului rezistent creşte proporţional cu pătratul turaţiei rotorului. Caracteristica de variaţie a momentului rezistent depinde şi de nivelul apei din carcasă, care se reglează cu robinetul (2d). Valoarea maximă a momentului rezistent este limitată de temperatura de fierbere a apei. În momentul când apa începe să se vaporizeze, frâna funcţionează instabil.
Frâna cu buloane se aseamănă constructiv cu frâna cu discuri, elementele active sunt buloanele fixate pe rotor şi carcasă. Momentul rezistent este produs de frecarea apei cu

82
buloanele şi pereţii carcasei, iar valoarea lui se reglează cu un robinet montat pe conducta de ieşire a apei calde din carcasă.
Frâna cu cupe este formată din rotorul (1) şi statorul (2) (fig. 9.1. c). Pe stator este fixată pâlnia (2b) pentru alimentarea frânei cu apă rece şi conducta (2c) pentru evacuarea apei calde. Pe rotor şi stator sunt montate palete sub formă de cupe. Forma cupelor este astfel aleasă încât să producă o mişcare turbionară a apa din interiorul carcasei. Momentul rezistent creşte proporţional cu pătratul turaţiei rotorului, iar valoarea lui se reglează cu robinetul (2d), montat pe conducta (2c) de ieşire a apei calde din carcasă.
Măsurarea momentului din arborele rotorului se face prin metoda suspendării . La frâne se utilizează următoarele tipuri de aparate pentru măsurarea a momentului: aparate cu pendul sau aparate cu dinamometru.
Gα M
MrMr
d
Mr FMr
a) b) c) d)
D31
1a
2
2c
2a2b 2 2b
3 2c
1
2d2d
α
Figura 9.1. Frâne hidraulice
Aparatul de măsurare a momentului cu pendul este format dintr-un sistem de pârghii şi pendul de greutate G (fig. 9.1. b). Momentului rezistent Mr produs de forţele de frecare roteşte carcasa (2) în jurul suportului (3) cu unghiul α. Pentru valori mici a unghiului α valoarea momentul rezistent este direct proporţională cu unghiul de rotire, α⋅= kM r .
Aparatul de măsurare a momentului cu dinamometru este format dintru-un dinamometru dispus la distanţa d faţă de axa frânei (v. fig. 247). În figura fig9.1. d dinamometrul (D) este de tip hidraulic, valoarea momentul rezistent este direct proporţională cu presiunea p din cilindrul dinamometrului, pkM r ⋅= . Scara manometrului (M) este gradată în unităţi de moment.
9.1.1. Frânele electrice Frânele electrice sunt maşini electrice care funcţionează în regim de frânare. În regimul de frânare al maşinilor electrice se produce procesul de frânare electromagnetică, care cuprinde două transformări de energii: energia mecanică transmisă de motor la arborele frânei este transformată în energie electrică, care prin efectul Joule este transformată în energie termică. Energia termică este disipată sub formă de căldură. Carcasa frânei poate oscila pe doi suporţi, pentru măsurarea momentului prin metoda suspendării .
Frâna de curent continuu este o maşină electrică de curent continuu, care funcţionează în regim de frânare dinamică. Frâna poate funcţiona şi în regim de motor, la pornirea motorului termic. În regim de frânare, curentul indus în înfăşurarea din rotor (deconectată de la sursă) este închis printr-o rezistenţă electrică, care disipează energia electrică generată sub formă de

83
căldură. Momentul de frânare se poate regla prin varierea intensităţii curentului electric din înfăşurarea din stator (înfăşurarea de excitaţie) cu un reostat, şi prin modificarea valorii rezistenţei electrice din circuitul rotorului.
Frâna de curent alternativ este o maşină asincronă trifazată cu rotor bobinat, care funcţionează în regim de frânare. Pentru pornirea motorului termic şi efectuarea rodajului la rece, frâna de curent alternativ poate funcţiona în regim de motor. Se pot folosi două metode de frânare: frânarea contracurent denumită şi frânarea prin legături inverse, şi frânarea dinamică.
Metode de frânare contracurent constă în conectarea frânei la reţeaua de alimentare în aşa fel încât câmpul magnetic inductor (din înfăşurarea statorului) să dezvolte un cuplu electromagnetic care să se opună mişcării de rotaţie a rotorului (legătură inversă). În timpul funcţionării în regim de frânare, curentul indus în înfăşurarea din rotor este închis printr-o rezistenţă electrică, care transformă energia electrică indusă în energie termică. Momentul de frânare se poate regla prin modificarea valorii rezistenţei electrice din circuitul rotorului.
Metode de frânare dinamică constă în conectarea înfăşurărilor de fază ale statorului la o sursă de curent continuu. Energia electrică indusă în înfăşurarea din rotor este disipată sub formă de căldură printr-o rezistenţă electrică conectată în circuitul rotorului. Momentul de frânare se poate regla prin varierea intensităţii curentului electric din înfăşurarea din stator, şi prin modificarea valorii rezistenţei electrice din circuitul rotorului.
Mr
d
Mr F
a) b)
D3
1
2c
2a2b
2d
2
ue
Figura 9.2. Frâne electrice
Frâna electromagnetică numită şi frână cu curenţi turbionari este o maşină electrică specială, construită să funcţioneze în regim de frânare. Este formată din rotorul (1), statorul (2), şi suportul (3) (fig. 9.2.). Rotorul este nebobinat cu suprafaţa exterioară canelată. Înfăşurarea statorului este formată din bobina circulară (2a) conectată la sursă de curent continuu. Fluxul magnetic produs de bobină creează momentul de frânare. Curenţi turbionari care se induc, încălzesc carcasa (statorul) şi rotorul frânei. Pentru menţinerea temperaturii la valori acceptabile, în carcasă este prevăzut un circuit de răcire cu apă, iar pe rotor un sistem de răcire cu aer. Apa rece întră în carcasă prin conducta (2b), iar prin conducta (2c) iese apa caldă. Reglarea debitului de apă se face cu robinetul (2d) (fig. 9.2. a).

84
Valoarea momentului de frânare se reglează prin variaţia intensităţii curentului electric. Măsurarea momentului rezistent Mr se face prin metoda suspendării. Dinamometrul (D) este de tip mecanic cu mărci tensometrice (v. fig. 7.2.). Valoarea momentului rezistent este direct proporţională cu tensiune ue a semnalului de măsurare (fig. 9.2. b).
9.2. Cercetarea experimentală
Cercetarea experimentală constă în determinarea pe standul de încercare a parametrilor şi a siguranţei de funcţionare a motorului. Încercările au în general un caracter normativ, metodologia de încercare este standardizată.
Parametrii motorului se determină în cadrul încercărilor de performanţă. Încercările de performanţă se fac în condiţii normale şi în condiţii speciale. Încercările în condiţii normale se desfăşoară într-un mediu ambiant cu parametri la valori normalizate, iar încercările în condiţii speciale se desfăşoară într-un mediu ambiant cu parametri la valori extreme.
Siguranţa de funcţionare numită şi fiabilitate, reprezintă capacitatea maşini de a funcţiona fără defecţiuni la valori normale a parametrilor, într-o anumită perioadă de timp şi în anumite condiţii. Defectarea sau ieşirea din funcţiune reprezintă pierderea totală sau parţială a capacităţii de funcţionare a maşinii, în mod accidental sau prin modificarea în timp a proprietăţilor . Defecţiunile accidentale sunt datorate unei proiectări sau execuţii necorespunzătoare, iar defectarea datorită modificării în timp a proprietăţilor (a materialelor din care este confecţionată maşina, etc.) sunt datorate exploatării. Maşina poate fi reparabilă sau nereparabilă. După defectare maşina reparabilă poate fi restabilită prin înlocuirea pieselor defecte. Maşina nereparabilă nu poate fi restabilită, după defectare se casează. Determinarea siguranţei de funcţionare se face în cadrul încercărilor de anduranţă, distructive, etc. încercările de anduranţă pot fi: încercările de anduranţă în timp real, şi încercările de anduranţă accelerate. încercarea de anduranţă în timp real se face la regimuri de funcţionare apropiate de cele de exploatare. Durata acestor încercări este mare. încercarea de anduranţă accelerată se desfăşoară în regim de funcţionare intens până la defectare maşinii.
Încercarea distructivă constă în mărirea progresivă a regimului de funcţionare până când maşina se defectează. Scopul acestei încercări este, depistarea subansamblurilor şi organelor "slabe" ale maşinii.
În funcţie de perioada în care se efectuează, încercările pot fi: încercări de omologare şi încercări de fabricaţie. Încercările de omologare se fac la omologarea maşinii, iar încercările de fabricaţie se fac în timpul fabricaţiei.
Încercările de omologare cuprind încercări de performanţă şi anduranţă, şi se fac cu scopul de a verifica dacă maşina realizează parametri proiectaţi. Încercările se fac în condiţii cât mai apropiate de cele de exploatare.
Încercările de fabricaţie cuprind încercări de performanţă şi anduranţă, şi se executa la terminarea montajului. Încercările se pot efectua la singur produs, sau la un lot de produse, permanent sau periodic.
Alte încercări de fabricaţie sunt: încercări de recepţie, se efectuează de producător în prezenţa beneficiarului; încercări de expertiză, se efectuează pentru depistarea cauzelor unor defecţiuni apărute în timpul exploatării. Dacă defectarea maşinii are urmări grave (produce accidente de muncă), atunci expertiza este stabilită şi supravegheată de un organism oficial.

85
C10. Prelucrarea datelor experimentale
Datele experimentale sunt valori a unor mărimi fizice, care în general variază în funcţie de timp sau de un parametru al maşinii investigate. După modul cum variază în funcţie de timp, mărimile fizice se clasifică: în mărimi fizice constante, şi în mărimi fizice variabile.
Mărimile fizice constante nu variază sau rămân cvasiconstante în intervalul de timp în care se efectuează măsurarea. Valorile mărimii fizice se determină prin măsurări statice cu aparate corespunzătoare.
Mărimile fizice variabile au o variaţie rapidă în funcţie de timp. Variaţia mărimii poate fi: periodică, aperiodică, şi aleatoare. Variaţia periodică este caracterizată prin repetarea valorilor, la intervale de timp egale (perioada T este constantă). Mărimile aperiodice, numite şi mărimi tranzitoriu variabile, au o variaţie oarecare în funcţie de timp şi nu au un caracter repetitiv. Pentru studierea acestor mărimi este necesar determinarea valorilor pe întregul interval de timp pe care evoluează. Mărimile cu variaţie aleatoare au variaţii imprevizibile în funcţie de timp, valorile mărimii fizice au un caracter întâmplător. Studierea acestor mărimi se poate face numai prin metode statistice.
Valorile mărimilor fizice variabile se obţin prin măsurări dinamice. Măsurările se fac cu aparate de măsură cu performanţe dinamice (banda de trecere, pulsaţia proprie, coeficientul de amortizare, timpul de repetiţie) şi dispozitive de afişare (înregistratoare grafice sau magnetice) corespunzătoare vitezei de variaţie a mărimii măsurate.
9.1. Erori de măsurare
Eroarea de măsurare reprezintă diferenţa între rezultatul măsurării şi valoarea reală. În toate cazurile operaţia de măsurare este afectată de erori, care nu pot fi controlate decât într-o anumită măsură. Datorită erorilor valoarea reală nu poate fi determinată. Prin prelucrarea datelor se poate preciza un interval în care valoarea reală poate fi localizată cu o anumită probabilitate.
Principalele cauze care duc la apariţia erorilor de măsurare sunt: imperfecţiunea principiului sau a metodei de măsurare; imperfecţiunea mijloacelor de măsurat; interacţiunea mediului ambiant, cu aparatul de măsurat şi cu obiectului supus măsurării; erori datorate operatorului uman.
Dacă principiul sau metoda de măsurare nu este riguros valabilă se produc "erori de model". În general, principiul sau metoda de măsurare este elaborată în condiţii idealizate, simplificate. Eroarea de model este cu atât mai mare cu cât condiţiile reale diferă de condiţiile ideale. Aparatele de măsură sunt imperfecte, caracteristicile metrologice (fidelitatea, justeţea, sensibilitatea) sunt limitate. Erorile produse datorită imperfecţiunii aparatelor de măsură se numesc erori instrumentale.
Interacţiunea mediului ambiant (variaţii de temperatură, de umiditate, de presiune, etc.) asupra aparatului de măsurat şi asupra obiectului supus măsurării, produc erori de interacţiune. Erorile de interacţiune sunt şi cele produse de acţiunea perturbatoare a aparatul de măsură şi a operatorul uman, asupra obiectului supus măsurării.
Operatorul uman poate comite erori numite greşeli de măsurare, datorită imperfecţiunii simţurilor (văzul), neatenţiei, neglijenţei, etc.

86
în funcţie de natura lor, erorile de măsurare se clasifică în: erori grosolane; erori sistematice; şi erori aleatoare.
Erorile grosolane depăşesc în mod semnificativ erorile probabile. Sunt greşeli de măsurare datorate, unei funcţionări defectuoase a aparatului de măsurare, aplicarea greşită a metodei de măsurare, citirea sau înregistrarea greşită a valorii măsurate, etc. La repetarea măsurării, datele greşite au o probabilitate foarte mică de a se reproduce, care permite depistare şi eliminarea lor din şirul datelor de măsurare. Sunt cazuri când datele afectate de erori grosolane sunt greu de depistat. În aceste cazuri, pentru depistarea şi eliminarea lor se aplică teste statistice speciale (Irwin, Grubbs, Romanovschi, etc.).
Erorile sistematice se caracterizează prin valori constante sau variază după o lege determinată. La repetarea măsurării, erorile sistematice nu pot fi depistate, deoarece generează o eroare aproximativ constantă. Depistarea acestor erori se poate face: prin măsurarea mărimii cu metode diferite; sau prin măsurarea cu acelaşi aparat a mai multor mărimi cunoscute. După cunoaşterea valorii, eroarea sistematică poate fi eliminată prin: reglarea aparatului de măsură; sau prin corectarea în mod corespunzător a mărimilor măsurate.
Cauzele care duc la producerea erorilor sistematice sunt: reglarea sau etalonarea incorectă a aparatului de măsură; de operator (erori de apreciere, erori de paralaxă, etc.); de condiţiile în care se desfăşoară măsurarea (temperatură diferită faţă de temperatura la care s-a executat etalonarea); etc.
Erorile aleatoare numite şi erori întâmplătoare, variază imprevizibil atât ca valoare şi semn la repetarea unei măsurări în codiţii neschimbate. Rezultatele măsurării diferă între ele datorită variabilităţii naturale a mărimilor fizice, şi a interacţiunilor multiple între aparatul de măsură şi obiectul supus măsurării. Erorile aleatoare nu pot fi anulate. Pe baza teoriei probabilităţilor se poate preciza intervalul în care se înscrie valoarea reală a mărimii măsurate.
9.2. Şiruri de date experimentale
Şirul de date experimentale reprezintă valorile aceleiaşi mărimi obţinute prin măsurări repetate în condiţii neschimbate. şirul de date reprezentă valorile unui parametru obţinute prin: măsurări pe n obiecte identice; sau prin măsurări repetate (de n ori) pe acelaşi obiect. Datorită erorilor aleatoare valorile şirului sunt variabile. Prin prelucrarea statistică a şirului de date se poate estima valoarea reală şi precizia cu care s-a realizat măsurarea.
Prelucrarea statistică a şirului de date se face prin metoda selecţiei. Selecţia numită şi sondaj, reprezintă un şir cu un număr restrâns de date, alese în mod reprezentativ dintr-un şir cu un număr forte mare de date, numit populaţie. Se consideră selecţia formată din şirul de date nxxx ,,, 21 K obţinut prin n măsurări, ordonat în ordine crescătoare min1 xx = ; maxxxn = .
Domeniul de variaţie minmax xx − a valorilor măsurate numit amplitudinea selecţiei, se împart
într-un număr m de intervale de lungimi egale. Lungimea intervalelor ∆ se poate stabili cu formula lui Sturges:
n
xx
lg22,31minmax
⋅+−=∆ (10.1)
Numărul n a valorilor măsurate, se numeşte volumul selecţiei, iar numărul valorilor fai cuprins în intervalul mixx ii ,,2,1],[ 1 K=+ se numeşte frecvenţă absolută. Raportul
nff airi /= , se numeşte frecvenţă relativă. Histograma de repartiţie a frecvenţelor relative
este prezentată în figura fig10.1. a.

87
Dacă numărul valorilor ∞→n şi lungimea intervalelor 0→∆ , histograma de repartiţie se transformă într-o curbă continuă denumită repartiţia probabilităţii , iar funcţia p(x) care defineşte repartiţia se numeşte densitate de probabilitate, sau funcţie de repartiţie a probabilităţii (fig. 10.1. b). Probabilitatea mărimii x de a lua valori în intervalul ),( 1+ii xx este
dată de integrala:
∫+=<< +1
)()( 1
i
i
x
xii dxxpxxxP (10.2)
Funcţia de repartiţie a probabilităţii are în general un maxim în centrul curbei de abscisă xp, numită valoarea cu probabilitate maximă. Împrăştierea valorilor şirului de date faţă de valoarea cea mai probabilă xp, este evaluată de dispersia σ2 sau de rădăcina pătrată a
dispersiei 2σσ = , numită abatere medie pătratică. Pentru o selecţie, împrăştierea valorilor
faţă de valoarea cea mai probabilă se caracterizează prin dispersia de sondaj 2σ , dată de relaţia:
∑=
−⋅=n
ipi xx
n 1
22 )(1σ (10.3)
Probabilitatea )( ban xaxP << cu care valoarea adevărată a parametrului măsurat a se găseşte
în intervalul ],[ ba xx se numeşte nivel de încredere, care se determină cu următoarea relaţie:
∫=<< b
a
x
xban dxxpxaxP )()( (10.4)
Intervalul ],[ ba xx în care se găseşte valoarea adevărată a cu probabilitatea )( ban xaxP << , se
numeşte interval de încredere, iar limitele intervalului de încredere xa şi xb se numesc limite de încredere.
a)
fr
b)
fr
x xx i x i+1 x i x i+1x a x bx p
P( xi < x < xi+1 ) p(x)
Figura 10.1. Histograma de repartiţie a frecvenţelor
Teoria probabilităţii şi statistica matematică defineşte o serie de funcţii de repartiţie a probabilităţii, pentru variabile aleatoare continue sau discrete. Pentru variabile aleatoare continue repartiţia probabilităţii este dată sub forma unei funcţii , iar pentru variabile aleatoare

88
discrete, repartiţia probabilităţii este dată sub formă de tabel. Funcţia de repartiţie care stă la baza metodelor de prelucrare a şirurilor de date experimentale, este funcţia de repartiţie normală numită şi repartiţia Laplace-Gauss (fig. 10.2. a).
La unele şiruri de date experimentale care nu au o repartiţie normală, se utilizează alte funcţii de repartiţie a probabilităţii: repartiţia Student, utilă pentru şiruri cu număr mic de măsurări; repartiţia Werbull, se utilizează la prelucrarea datelor privind studiul durabilităţii elementelor dintr-un sistem tehnic; repartiţia Rayleigh, se utilizează la prelucrarea datelor privind modelarea fenomenelor de uzură. Pentru a stabili funcţia de repartiţie care se poate aplica unui şir de date trebuie să se efectueze teste de concordanţă, cum ar fi: testul Kolmogorov, testul
2χ , testul Smirnov, testul Wilcoxon, etc.
Şirurile de date cu repartiţie normală sunt cele mai întâlnite în practică. Funcţia de repartiţie normală a probabilităţii este definită de relaţia:
22
)(
2
1)( σ
πσ⋅−
−⋅
⋅⋅=
ai mx
exp (10.5)
Parametrii repartiţiei normale, valoarea medie ma şi abaterea medie pătratică (dispersia) σ se calculează cu relaţiile:
n
mx
n
xm
a
n
ii
n
ii
a
)(lim;lim 1
1
1
1
−==
∑∑=
∞→=
∞→σ (10.6)
În aplicaţiile practice numărul datelor experimentale dintr-un şir este limitat la aproximativ 30 de valori n < 30, valoarea medie ma se aproximează cu media aritmetică x , iar abaterea medie pătratică (dispersia) σ, se aproximează cu dispersia de sondaj 2σ . Parametri unei selecţii de date (n < 30) cu repartiţie normală se determină cu relaţiile:
)(1
1ˆ;
1
11a
n
ii
n
ii mx
nx
nx −⋅
−=⋅= ∑∑
==
σ (10.7)
În funcţie de valoarea dispersiei σ curba de repartiţie normală poate fi mai aplatizată sau mai ascuţită. Dacă dispersia este scăzută (precizii mai bune de măsurare) curba devine mai ascuţită 21 σσ < (fig. 10.2. b). Dacă valorile şirului de date experimentale au fost obţinute prin măsurători cu aceiaşi precizie, atunci media aritmetică x a măsurătorilor este cea mai bună estimare a valorii adevărate a:
∑=
⋅=≅n
iix
nxa
1
1 (10.8)
Valoarea adevărată a şirului de date experimentale se estimează cu o eroare mai mică decât abaterea limită lε : lxa ε<−
La un şir de date experimentale cu repartiţie normală eroarea limită lε se poate estima cu
ajutorul relaţiei (regula trei sigma):
nl
σε ˆ3⋅= (10.9)

89
În acest caz, valoarea adevărată este estimată între limitele lxa ε±= , cu nivelul de încredere
0,9973=)( lln xaxP εε +<<− .
a) b)
p(x)
0
1
2
3
4
ma m + 3σa xm - 3σa
σ < σ1 2
σ2
p(x)
0
1
2
3
4
ma m + 3σa xm - 3σa
Figura 10.2. Funcţia normală de repartiţie a probabilităţii
Precizia de estimare a valorii adevărate se poate ridica, prin mărirea numărului de măsurători n şi prin mărirea preciziei de măsurare (reducerea dispersiei de sondaj σ ). Din analiza relaţiei 10.9 rezultă, eroarea limită scade direct proporţional cu mărirea preciziei de măsurare ( σ/1 )
şi rădăcina pătrată a numărului de măsurători ( n/1 ). În concluzie, din considerente practice numărul măsurătorilor se limitează n < 30. Pentru reducerea intervalului de încredere
],[ ll xx εε +− se măreşte precizia de măsurare.
9.3. Prezentarea datelor experimentale
Datele experimentale sub forma unei variabile y dependentă de altă variabilă x, pot fi prezentate sub formă tabelară, grafic, sau analitic.
Prezentarea tabelară constă în întocmirea unui tabel. În coloana de intrare sunt trecute valorile variabilei independente x, care variază în mod obişnuit cu pas constant. În coloanele următoare sunt trecute variabile dependente de forma: )(,),(),( 2211 nn xfyxfyxfy === K .
În capul fiecărei coloane se trece denumirea variabilei şi unitatea de măsură.
Pentru a determina o valoare lui y pentru o valoare intermediară a lui x, 1+<< ii xxx , se aplică
o operaţie de calcul numită interpolare. Interpolarea constă în găsirea unei funcţii F(x) definită de valorile numerice din tabel:
niyxF i ,,2,1,)( K== (10.10)
Forma cea mai convenabilă a funcţiei F(x), numită funcţie de interpolare sau interpolat, este un polinom. În funcţie de forma polinomului se cunosc mai multe forme de realizare a interpolării: interpolarea liniară, interpolarea cu polinom Lagrange, interpolarea cu funcţii spline, etc.

90
Interpolarea liniară este realizată de un polinom de interpolare de gradul I (dreaptă). Determinarea valorii lui y pentru o anumită valoare x cuprinsă în intervalul $[x_i,\;x_i+1]$, se face cu relaţia:
)(1
1i
ii
iii xx
xx
yyyy −⋅
−−+=
+
+ (10.11)
Dacă valoarea lui x se găseşte în afara intervalului ],[ 1 nxx , valoarea lui y se determină prin
extrapolare, aplicată funcţiei de interpolare a tabelului.
Prezentarea grafică a datelor experimentale constă în trasarea graficului de variaţie a variabilei y în funcţie de variabila independentă x. Pentru trasare: se alege scara, multiplu de 1, 2, 5, sau 10; se marchează diviziunile pe axele de coordonate; se marchează punctele de coordonate ),( ii yx ; se trasează curba de variaţie. Graficul funcţiei se trasează sub forma unei
curbe continuă, fără puncte de inflexiune. Curba poate trece printre punctele ce reprezintă valorile măsurate. Prin încercări se caută o funcţie liniară, parabolică, exponenţială, etc. care să treacă cât mai aproape, printre punctele ce reprezintă valorile datelor experimentale. Acest mod de trasare a graficului este justificat prin faptul că, valorile măsurate sunt determinate în limitele unor erori aleatoare.
Prezentarea datelor experimentale sub formă de variaţie grafică are avantajul unei interpretări mai uşoare a rezultatelor experimentale, prin evidenţierea punctelor de maxim sau de minim, a punctelor de inflexiune, etc.
Prezentarea analitică a datelor experimentale are avantaje evidente; asupra funcţiei analitice se pot aplica operaţii matematice de derivare, integrare, etc., este posibilă modelarea matematică a proceselor fizice. Pentru determinarea funcţiei analitice se parcurg următoarele etape: alegerea formei; determinarea constantelor; şi verificarea concordanţei.
Pentru alegere expresiei funcţiei analitice nu există reguli generale. Dependenţa funcţională este definită de fenomenele fizice evaluate prin datele experimentale. Expresia funcţie trebuie să fie simplă, cu un număr minim de constante arbitrare. Pentru a intui forma funcţiei datele se pot reprezenta sub forma unui grafic. Prin analizarea graficului se poate alege forma cea mai adecvată a funcţiei. Dacă este nevoie se pot alege două sau mai multe funcţii, fiecare funcţie defineşte variaţia fenomenului fizic pe un subinterval.
Principale forme de funcţii folosite la prelucrarea datelor sunt:
• Funcţie polinomială:
;0
2210∑
=
++++==n
i
nn
ii xaxaxaaxay K
• Funcţie omografică:
;0, ≠−++= bcad
dcx
baxy
• Funcţie exponenţială:
;ceay bx +⋅=
• Funcţie putere:
;axby ⋅=

91
• Funcţie trigonometrică:
;)sincos(2 1
0 ∑=
⋅+⋅+=n
kkk kxbkxa
ay
Metoda cea mai utilizată pentru determinarea constantelor funcţiei este, metoda celor mai mici pătrate. Este cea mai precisă metodă, şi se poate aplica oricărui tip de funcţie. Fie funcţia analitică ),,,,( 10 naaaxfy K= care descrie şirul de date experimentale
nixfyi ,,2,1),( K== , obţinut prin măsurări cu aceiaşi precizie. Metoda constă în
determinarea constantelor naaa ,,, 10 K pe baza condiţiei, dispersia erorilor dintre valorile
şirului de date experimentale şi ale funcţiei să fie minimă:
∑=
−=n
inii aaaxfy
1
210
2min )],,,,([ Kσ (10.12)
Condiţia de minim (ec218) se reduce la următorul sistem de ecuaţii:
−
∂∂
−
∂∂
−
∂∂
∑
∑
∑
=
=
=
n
inii
n
n
inii
n
inii
aaaxfya
aaaxfya
aaaxfya
1
210
1
210
1
1
210
0
)],,,,([
)],,,,([
)],,,,([
K
M
K
K
(10.13)
Prin rezolvarea sistemului de ecuaţii (10.13) rezultă constantele funcţiei naaa ,,, 10 K . Dacă
sistemul este cu ecuaţii neliniare, se recomandă liniarizarea acestora pentru a simplifica procedeul de rezolvarea.
Verificarea concordanţei constă în alegerea acelei funcţii care descrie cel mai bine şirul de date experimentale. Pentru fiecare funcţie se aplică criteriul de concordanţă a lui Gauss:
∑=
−⋅−
=Ωn
iiei yy
kn 1
2)(1
(10.14)
unde: n este numărul perechilor de valori ),( eii yx determinate prin măsurare; k este numărul
constantelor; )( ii xfy = este valorile funcţiei pentru ixx = .
Se alege funcţia analitică care are Ω cel mai mic. Dacă pentru prezentarea analitică a şirului de date experimentale se folosesc două sau mai multe funcţii, atunci pentru fiecare interval se aplică textul lui Gauss.

92
9.4. Prelucrarea mărimilor variabile
Mărimile fizice cu variaţie periodică sunt reprezentate sub forma unei serii trigonometrice cu număr infinit de termeni:
∑∞
=
⋅+⋅⋅=1
0 )sincos(2
)(i
kk kbkaa
x θθθ (10.15)
unde: τωθ ⋅= este argumentul funcţiei; ω este pulsaţia; τ este timpul. Perioada funcţiei este: fT /1/2 == ωπ , unde f este frecvenţa perioadelor. Coeficienţii seriei a0, ak şi bk se
determină cu relaţiile:
;sin)(1
;cos)(1
;)(21 2
0
2
0
2
00 θθθπ
θθθπ
θθπ
πππ
∫∫∫ === dkxbdkxadxa kk (10.16)
n termen al seriei trigonometrice se numeşte armonică. Primul termen al seriei trigonometrice se numeşte armonică fundamentală.
Reprezentarea unei mărimi periodice se face cu o serie trigonometrică cu un număr finit de termenii. În general variaţia mărimii este dată sub forma unui grafic trasat de dispozitivul de înregistrare a aparatului de măsură. Pentru coeficienţilor se aplică metode de integrare grafică.
Valoarea medie Xm şi valoarea eficace sau valoarea efectivă Xef a funcţiei periodice se calculează cu relaţiile:
τθτθ dxT
XdxT
XT
ef
T
m ∫∫ ==0
2
0)(
1;)(
1 (10.17)
Mărimile fizice cu variaţie aperiodică evoluează în funcţie de timp după legi bine determinate, dar valorile lor nu au un caracter periodic. Mărimile aperiodice reprezintă variaţia în funcţie de timp între două stari de echilibru. Funcţia analitică care reprezintă o mărime aperiodică este sub forma unei sume algebrice formată din doi termeni. Primul termen al funcţiei analitice defineşte evoluţia tranzitorie, iar al doilea termen al funcţiei defineşte evoluţia staţionară a mărimi fizice aperiodice. Un exemplu de mărime fizică aperiodică este semnalul ieşire a aparatelor de măsură (v. par. 2.1.3).
în general mărimea aperiodică este dată sub forma unui grafic trasat de dispozitivul de înregistrare a aparatului de măsură. Prelucrarea constă în determinarea structurii spectrale a mărimii. Pentru studierea spectrului de frecvenţe a mărimii se determină transformata Fourier directă. Transformata Fourier se poate determina analitic (la mărimi reprezentate analitic) sau grafic.
Mărimile fizice cu variaţie aleatoare variază imprevizibil, valorile pe care le iau la momente diferite de timp sunt întâmplătoare. Variabila aleatoare funcţie de timp se numeşte funcţie aleatoare, proces aleatoriu sau proces stohastic. Funcţia care descrie variaţia mărimii aleatoare în funcţie de timp se numeşte realizarea (traiectoria) procesului stohastic. La repetarea procesului se obţine o nouă realizare care diferă în mod aleatoriu de realizarea precedentă. Valorile descrise de o realizare sunt semnificative numai dacă sunt însoţite de

93
probabilitatea de apariţie. Datorită acestor caracteristici mărimile cu variaţie aleatoare în funcţie de timp se pot prelucra numai prin metode statistice. Studiul acestui tip de variaţie este important deoarece descrie mai realist procesele fizice.
Mărimi fizice cu variaţie aleatoare în funcţie de timp se întâlnesc: la procesul de ardere de la motoarele cu aprindere prin scânteie (fenomenul de dispersie ciclică); la procesele de frecare; la procese însoţite de vibraţii, zgomote, etc.
La analiza funcţiilor aleatoare se determină următori parametri principali: valoarea medie statistică, dispersia şi funcţia de autocorelaţie.
Valoarea medie statistică reprezintă variaţia în jurul căreia se grupează diferite realizări a mărimii aleatoare la un moment dat.
Dispersia reprezintă abaterile mărimii aleatoare faţă de valoarea medie statistică.
Funcţia de autocorelaţie reprezintă media realizărilor mărimii aleatoare la două momente diferite de timp.
Procesul aleator este staţionar dacă parametri statistici rămân invariabili la schimbarea arbitrală a originii timpului, în caz contrar procesul aleatoriu este nestaţionar. Procesul aleator staţionar cu valoarea medie statistică egală cu valorile medii temporale, se numeşte proces aleator ergodic.

94
BIBLIOGRAFIE
1. Abătăncei D. ş.a. Motoare pentru automobile şi tractoare. Vol. I şi Vol. II. Bucureşti, Editura Tehnică, 1978, 1980.
2. Apostolescu N., Taraza D. Bazele cercetării experimentale a maşinilor termice. Bucureşti, Editura Didactică şi Pedagogică, 1979.
3. Aramă C., Grünwald B. Motoare cu ardere internă. Procese şi caracteristici. Bucureşti, Editura Tehnică, 1966.
4. Băţaga N.,ş.a. Motoare cu ardere internă. Bucureşti, Editura Didactică şi Pedagogică, 1995.
5. Băţaga N., Căzilă A., Cordoş N. Rodarea, uzarea, testarea şi reglarea motoarelor termice. Bucureşti, Editura Tehnică, 1995.
6. Chioreanu N. Motoare termice monoregim. Oradea, Editura Universităţii din Oradea, 2006.
7. Constantinescu I., Golumbovici D., Militaru C. Prelucrarea datelor experimentale cu calculatoare numerice. Bucureşti, Editura Tehnică, 1980.
8. Grünwald B. Teoria, calculul şi construcţia motoarelor pentru autovehicule rutiere. Bucureşti, Editura Didactică şi Pedagogică, 1980.
9. Ionescu G. Măsurători şi traductoare, Vol. I. Bucureşti, Editura Didactică şi Pedagogică, 1985.
10. Negrea V.D. Bazele cercetării experimentale a motoarelor cu ardere internă şi a autovehiculelor rutiere, Vol. I şi II. Oradea, Editura Universităţii din Oradea, 2006.
11. Popa B., Băţaga N., Căzilă A. Motoare pentru autovehicule. Funcţionare, caracteristici, rodaj, uzare, testare şi reglare. Cluj-Napoca, Editura Dacia, 1982.
12. Stratulat M., Şoiman M., Văiteanu D. Diagnosticarea automobilelor. Bucureşti, Editura Tehnică, 1977.
13. Tiron M. Teoria erorilor de măsurare şi metoda celor mai mici pătrate. Bucureşti, Editura Tehnică, 1972.
14. Tiron M. Prelucrarea statistică şi informaţională a datelor de măsurare. Bucureşti, Editura Tehnică, 1976.