Curs 4 - Sistemul de Mas MMCO
15
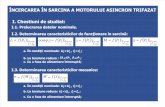
Capitolul 2 - Sistemul de măsurare al MMCO Cursul 4 – Sisteme de palpare folosite la MMCO (continuare) Fig. 4.1 Mecanismul de acţionare a sistemului de palpare: 1 – mecanism de acţionare; 2 – element de adaptare a palpatorului; 3 – palpatorul; 4 – extensie; 5 – vârf de palpare - un sistem de palpare este alcătuit, în general, din următoarele părţi componente (figura 4.1): • mecanismul de acţionare a sistemului de palpare; • palpatorul; • extensia (extensiile); • vârful de palpare; - palpatorul = elementul prin care se face măsurarea suprafeţei reperului supus inspecţiei dimensionale; - acesta poate funcţiona pe două principii: • prin contact cu măsurandul; • fără contact cu suprafaţa măsurată
-
Upload
anda-alexandra -
Category
Documents
-
view
49 -
download
1
description
fghbsf
Transcript of Curs 4 - Sistemul de Mas MMCO
Slide 1
Capitolul 2 - Sistemul de msurare al MMCO
Cursul 4 Sisteme de palpare folosite la MMCO (continuare)
Fig. 4.1 Mecanismul de acionare a sistemului de palpare: 1 mecanism de acionare; 2 element de adaptare a palpatorului; 3 palpatorul; 4 extensie; 5 vrf de palpare- un sistem de palpare este alctuit, n general, din urmtoarele pri componente (figura 4.1): mecanismul de acionare a sistemului de palpare; palpatorul; extensia (extensiile); vrful de palpare; - palpatorul = elementul prin care se face msurarea suprafeei reperului supus inspeciei dimensionale;- acesta poate funciona pe dou principii: prin contact cu msurandul; fr contact cu suprafaa msurat- palpatoarele pe principiul contactului cu reperul msurat
Fig. 4.2 Palpatoare avnd ca principiul msurarea prin contact cu suprafaa n general palpatoarele cu funcionare prin contact sunt cu declanare; principiul de funcionare declanarea unui semnal electric la atingerea obiectului; acest semnal = comanda pentru sistemul de acionare (oprirea deplasrii) i pentru sistemul de msurare (oprirea contorizrii impulsurilor)
Fig. 4.3 Construcia unui palpator cu declanare contacte electrice: 1 corpul fixat pe pinola coloanei mainii (fix); 2 subansamblul mobil al sistemului de palpare; 3 cilindri de centrare a sistemului de palpare; 4 role de contact; 5 arc spriral elicoidal pentru asigurarea forei de msurare; 6 vrf de palpare; 7 contacte electrice2Erori de palpare
Fig. 4.4 Msurarea prin metoda de zero1 msurand; 2 sistem de palpare; 3 - suport; 4 traductor de deplasare- iniial, n momentul contactului dintre suprafaa msurat i vrful de palpare, dimensiunea msurat este , fiind afectat de eroarea
pentru compensarea erorii se aduce n contact msurandul pn la declanarea semnalului de comutare, moment n care se face etalonarea traductorului de deplasare: prin aceasta deplasarea se regleaz la valoarea A.
o alt surs de - neuniformitatea forei de palpare; fora necesar pentru deschidere este dependent de direcia de acionare braele de prghii care se formeaz n mecanism au lungimi diferiteErori de palpare
Fig. 4.6 Variaia forei de msurare n funcie de sensul de palpare: a) palpare spre stnga; b) palpare spre dreapta n cazul palprii spre stnga, (4.1) n cazul palprii spre dreapta, (4.2) cazul cel mai defavorabil: (4.3)
- deformaia de ncovoiere a tijei palpatorului = surs de erori sistematiceErori de palpare
Fig. 4.7 Erori de introduse de palpator la msurarea unui calibru inelar: 1 geometria nominal; 2 geometria indicat de MMC, afectat de erori pentru reducerea drastic a acestor erori se folosesc palpatoare cu comutare electronic, ce au ncorporate traductoare piezoelectrice montate n capul de palpare; ele asigur aceai sensibilitate pentru orice direcie de palpare i micoreaz deformaiilor tijei palpatorului prin reducerea substanial a forei de msurare; indiferent de direcia de palpare, sistemele bazate pe principiul piezoelectric pot furniza impulsuri de msurare la fore de palpare sub 0,01 N Construcia palpatorului TP 20 folosit n prezent la scar larg deoarece ofer o serie de avantaje: poate fi instalat uor i rapid pe diferite variante de MMCO manuale i CNC-uri; poate fi adaptat cu uurin att la capetele de msurare manuale, ct i la cele automate.
Fig. 4.8 Palpatoarele TP20- palpatorul TP20 se compune din dou pri: corpul palpatorului; un modul pentru prinderea vrfului de palpare
Fig. 4.9 Structura palpatorului TP20: 1 corpul palpatorului; 2 alezaje de prindere a cheii de montaj a corpului; 3 modulul de palpare; 4 repere de aliniere; 5 - nervur de asamblare pentru magazia de alimentare automat, 6 cuplaj magnetic / cinematic; 7 vrf de palpare; 8 carcasa modulului de palpare; 9 inel de protecie cu cod de culoare
Clasificarea palpatoarelor TP 20 n funcie de fora de msurare
- culoarea verde palpator pentru fore de contact mici;- culoarea neagr palpator pentru fore de contact standard;- culoarea gri palpator pentru fore de contact medii;- culoarea maro palpator pentru fore de contact mari;- culoarea albastr - palpator pentru msurarea dup 6 direciiConstrucia palpatorului TP 20
Fig. 4.10 Montajul palpatorului TP20: 1 contrapiuli filetat, M8 (solidar cu capul de msurare); 2 cheie special de fixare a corpului palpatorului; 3 corpul palpatorului; 4 modului de fixare a vrfului de palpare; 5 vrful de palpare; 6 cheie special de fixare a vrfului de palpareConstrucia palpatorului TP 20 din punctul de vedere al lungimii vrfurilor de palpare, palpatoarele din seria TP 20 pot fi prevzute cu urmtoarele tipuri de module: modulul pentru fore de contact mici (LF) asigur un nivel ridicat de precizie, fiind prevzut cu vrfuri de palpare scurte, din materiale uoare; modulul pentru fore standard (SF) este adaptabil pentru majoritatea aplicaiilor; modulul pentru fore medii (MF) confer o bun rezisten la vibraii, acestea fiind prevzute cu vrfuri de palpare mai lungi; modulul pentru fore mari (EF) este potrivit pentru montajele ce necesit vrfuri de palpare foartge lungi; modulul pe 6 direcii (6W) pentru msurarea ntriturilor i a nervurilor ofer performane metrologice net superioare modulului pe 6 direcii aferent palpatorului TP2; dou module cu sisteme de prelungire (EM1 i EM2) se substituie vrfurilor de palpare avnd aceeai lungime, n vederea asigurrii unor mai bune performane metrologice:
Clasificarea palpatoarelor TP 20 n funcie lungimea vrfului de palpareFig. 4.11 Gama de module de fixare a vrfurilor de palpare, folosite la palpatoarele TP 20Variante constructive ale sistemelor de palpare
Fig. 4.12 Palpator activ, cu msurare dup trei direcii : 1 sfer palpatoare; 2 tij palpatoare; 3 membrana cu decupri; 4 carcas; 5, 8, 10 miezuri ale bobinelor; 6, 9, 11; 12 buc de reglaj pentru asigurarea poziiei corecte a bobinei 11 fiecare bobin n parte apariia unui semnal numai la deplasarea sa longitudinal, nu i la cea transversal decuplarea semnalelor i posibilitatea msurarii tridimensionale; Caracteristici tehnico funcionale: domeniul de msurare = 100 m; eroarea de msurare = 0,4 m pe ntregul domeniuAvantaje: - simplitate constructiv; - posibilitatea msurrii pe cele 3 direcii; - pre de cost relativ sczutDezavantaj: - anizoelasticitatea membranei pe cele 3 direcii de msurareVariante constructive ale sistemelor de palpare soluia unei sprijiniri duble, pe dou membrane cu h = 0,15 mm, la o distan de 5 mm o mbunataire a izoelasticitatii: kx = 2,78 0,006 mN/m; ky = 2,91 0,006 mN/m; kz = 2,37 0,006 mN/m;- sprijinirea palpatorului prin intermediul unor paralelograme cu elemente elastice o soluie tehnic i mai bun, datorit decuplrii deplasrilor dpdv cinematic
Fig. 4.13 Sistem de paralelograme cu elemente elastice pentru asigurarea mobilitaii tridimensionale- prin dimensionarea corespunzatoare a lamelelor i o pretensionare la montaj a acestora se obine caracteristica for-deplasare dorit i fora de palpare necesar
Fig. 4.14 Caracteristica elastic a palpatorului avnd drept soluie consructiv sistemul de paralelograme cu elemente elasticeVariante constructive ale sistemelor de palpare- dpdv al sistemului de msurare, traductoarele inductive = soluia cea mai des utilizat;- amplasarea traductoarelor de deplasare se poate face dup una sau dou direcii principale
Fig. 4.15 Amplasarea traductoarelor inductive pentru palpatorul activ: a msurare dup o direcie; b msurarea dup dou direcii- soluia brevetat de compania Opton o construcie mai complex; fora de msurare poate fi obinut i modificat prin efectul curentului ce strabate o bobin plasat ntr-un cmp magnetic inelar;- celor trei sisteme paraleograme cu elemente elastice le revine funcia de susinere i ghidare a palpatorului
Fig. 4.16 Palpatorul activ, cu posibilitati de msurare, al firmei Opton: 1 mecanism paralelogram cu elemente elastice; 2 traductoare inductive; 3 limitator de curs; 4 generatorul electromagnetic al forei de msurare; 5 orificii pentru tija palpatorului; 6 circuit electronic de prelucrare a semnalelor de la traductoarele inductive; 7 dispozitiv de fixare a mecanismului de palpareFig. 4.17 Caracteristica fortei de msurare Variante constructive ale sistemelor de palpare- elementele elastice sunt cuplate la un amortizor hidraulic cu frecare vscoas mbuntirea considerabil a caracteristicii forei de palpare
Fig. 4.16 Palpatorul activ, cu posibilitati de msurare, al firmei Opton: 1 mecanism paralelogram cu elemente elastice; 2 traductoare inductive; 3 limitator de curs; 4 generatorul electromagnetic al forei de msurare; 5 orificii pentru tija palpatorului; 6 circuit electronic de prelucrare a semnalelor de la traductoarele inductive; 7 dispozitiv de fixare a mecanismului de palpare
Caracteristici tehnico funcionale: - rezoluia = 0,1 m / domeniul de msurare = 200 m = 0,4 m / domeniu de msurare = 800 m- palpatoarele pe principiul msurrii fr contact cu suprafaa reperul ui dezvoltarea lor a cpatat un impuls deosebit odat cu creterea cererilor de msurri din domeniul micro-electronicii, al Biomecanicii etc.; se utilizeaz n urmtoarele situaii: cnd reperul este confecionat dintr-un material deformabil; cnd suprafaa acestuia este foarte lucioas; cnd parametrii geometrici ce trebuie msurai sunt greu accesibili ca urmare a dimensiunilor reduse ale obiectului
Fig. 4.20 Microscop de vizare, ataabil la pinola MMC- acesta are posibilitatea de proieciei pe ecran a imaginii reperului scanat sau msurat- palpatoarele pe principiul msurrii fr contact cu suprafaa reperul ui
Fig. 4.21 Principiul de funcionare al unui sistem de msurare prevzut cu surs laser- coordonatele 3D ale punctului luminos pe obiect se pot calcula conform relaiei:
(4.3)- eroarea absolut z a distanei:
(4.4)p i = erorile de msurare corespunztoare parametrilor p i - palpatoarele pe principiul msurrii fr contact cu suprafaa reperul ui
Fig. 4.22 Palpatorul cu surs laser Metris XC 50-LS montat pe pinola unei MMCO