Curs 13 Strategia de multiplexare SDH/SONETusers.utcluj.ro/~dtl/TF/Cursuri/Curs_13_14_slide.pdf ·...
25
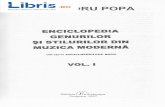
Curs 13 Strategia de multiplexare SDH/SONET Elementele multiplexului SDH/SONET o Containerul C – reprezintă o structură bloc cu dimensiuni impuse ce conţine numai date recepţionate de la un afluent, adică nu conţine informaţie de management sau control. o Există containere de diferite dimensiuni adaptate debitelor furnizate de diferiţi afluenţi PDH. Capacitatea de transport a containerelor se alege mai mare decât debitul afluenţilor PDH corespunzători → printr-o dopare pozitivă corespunzătoare se pot gestiona abaterile de la debitele nominale ale semnalelor PDH. o Containerele caracteristice sistemului SDH sunt: • C4 – debit de 149,76Mbps ; • C3 – debit de 48,384Mbps ; • C2 – debit de 6,784Mbps ; • C12 – debit de 2,176Mbps ; • C11 – debit de 1,6Mbps ; o Containerul virtual VC – reprezintă containerul completat cu un „Path Overhead” (POH) • POH se utilizează pentru a monitoriza şi controla transmisia informaţiei din container pe toată calea între sursă şi destinaţie şi pentru a identifica conţinutul containerului ; POH nu este modificat pe durata transmisie. • Containerelor de ordin superior (C3 şi C4) au POH format dintr-o coloană de 9 octeţi. • Containerele de ordin inferior (C11, C12 şi C2) au POH format din 4 octeţi distribuiţi pe 4 containere succesive, un container dat conţinând un singur octet POH. C4 C3 POH POH 1 261 1 85 VC4 VC3 C2 POH 1 12 VC2 C12 POH 1 4 VC12 C11 POH 1 3 VC11 Fig. 1 Structura containerelor şi a containerelor virtuale utilizate în sistemul de transmisie – multiplexare SDH
Transcript of Curs 13 Strategia de multiplexare SDH/SONETusers.utcluj.ro/~dtl/TF/Cursuri/Curs_13_14_slide.pdf ·...

Curs 13 Strategia de multiplexare SDH/SONET
Elementele multiplexului SDH/SONET
o Containerul C – reprezintă o structură bloc cu dimensiuni impuse ce conţine numai date recepţionate de la un afluent, adică nu conţine informaţie de management sau control.
o Există containere de diferite dimensiuni adaptate debitelor furnizate de diferiţi afluenţi PDH. Capacitatea de transport a containerelor se alege mai mare decât debitul afluenţilor PDH corespunzători → printr-o dopare pozitivă corespunzătoare se pot gestiona abaterile de la debitele nominale ale semnalelor PDH.
o Containerele caracteristice sistemului SDH sunt:
• C4 – debit de 149,76Mbps ;
• C3 – debit de 48,384Mbps ;
• C2 – debit de 6,784Mbps ;
• C12 – debit de 2,176Mbps ;
• C11 – debit de 1,6Mbps ;
o Containerul virtual VC – reprezintă containerul completat cu un „Path Overhead” (POH)
• POH se utilizează pentru a monitoriza şi controla transmisia informaţiei din container pe toată calea între sursă şi destinaţie şi pentru a identifica conţinutul containerului ; POH nu este modificat pe durata transmisie.
• Containerelor de ordin superior (C3 şi C4) au POH format dintr-o coloană de 9 octeţi.
• Containerele de ordin inferior (C11, C12 şi C2) au POH format din 4 octeţi distribuiţi pe 4 containere succesive, un container dat conţinând un singur octet POH.
C4
C3
POH POH
1 261 1 85
VC4 VC3
C2 POH
1 12
VC2
C12 POH
1 4
VC12
C11 POH
1 3
VC11 Fig. 1 Structura containerelor şi a containerelor virtuale utilizate în sistemul de transmisie – multiplexare SDH

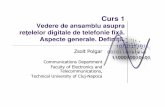
o Unităţi administrative AU (Administrative Units) – aceste unităţi se obţin din containerele virtuale VC-3 şi VC-4 prin adăugarea la aceste structuri a unor poantori care stabilesc relaţia dintre punctul de referinţă STM-1 şi începutul containerelor virtuale VC-3 respectiv VC-4.
• Poantorul AU3 este format din trei octeţi, iar poantorul AU4 este format din 9 octeţi, din care practic se utilizează numai 5 octeţi (2 octeţi poantori + 3 octeţi pentru dopare negativă).
• Încărcarea unui cadru STM-1 constă dintr-o unitate AU4 sau trei unităţi AU3.
o Unităţi de afluent TU (Tributary Unit) – aceste unităţi se formează din containerele virtuale VC11, VC12, VC2 şi VC3 prin adăugarea unor poantori.
• În unităţile TU11, TU12 şi TU2 este loc doar pentru un singur octet poantor, dar sunt necesari 4 octeţi poantor pentru operaţiile efectuate cu poantori → soluţia este distribuirea octeţilor poantor pe 4 unităţi TU.
• În unitatea TU3 obţinută dint-un container VC3 se utilizează un poantor pe 3 octeţi.
Tip TU Structură Debit total TU11 9 linii, 3
coloane 1,728Mbps
TU12 9 linii, 4 coloane
2,304Mbps
TU2 9 linii, 12 coloane
6,912Mbps
TU3 9 linii, 86 coloane
49,535Mbps
Tab. 1 Parametrii unităţilor de afluent din sistemul de transmisie - multiplexare SDH
VC4
TU3
10 270
1 86
TU2
1 12
TU12
1 4
TU11
1 3 TU3 pointer
completare
VC3
4 90 pointer AU4 pointer AU3
AU4 AU3
9 octeţi
3 octeţi
Fig. 2 Structura unităţilor administrative şi a unităţilor de afluent utilizate în sistemul de transmisie – multiplexare SDH

o Grupe de unităţi administrative TUG (Tributary Unit Group) – unităţile de afluent sunt multiplexate în grupe de unităţi de afluent.
• Aceste unităţi reprezintă un aranjament al semnalelor structurate în blocuri cu o lungime de cadru de 125µs şi (poziţie) fază identică.
• Generarea unităţilor TUG se realizează prin simpla multiplexare coloană cu coloană a unităţilor TU, fără nici o ajustare de fază, adică de poziţie.
• Există două astfel de tipuri unităţi TUG:
� TUG2 - cuprinde o unitate de afluent TU2 sau 3 unităţi de afluent TU12 sau 4 unităţi de afluent TU11.
� TUG3 care cuprinde o unitate de afluent TU3.
o Grupuri de unităţi administrative AUG (Administrative Unit Group) – se formează dintr-un AU4 sau prin multiplexarea a trei AU3. Reprezintă o structură formată din 261 coloane, 9 rânduri plus 9 octeţi poantori în rândul 4
Observaţie: structurile matriciale descrise se alcătuiesc doar în multiplexoare, transmisia pe linie fiind una serială.
Structuri bloc utilizate în cazul sistemului SONET
o SPE - SONET Payload Envelope - format din “payload”, o structură matricială cu dimensiunile 9 linii × 86 coloane şi POH format dintr-o coloană cu 9 linii - este o structură echivalentă cu containerul virtual VC3 din cazul SDH.
• Capacitatea părţii “payload” este de 49,536 Mbps, iar a întregului container SPE este de 50,112 Mbps.
o Unităţi de afluent VT - Virtual Tributary. Aceste unităţi sunt similare unităţilor de afluent TU din cazul sistemului SDH. Există 4 astfel de unităţi:
o Unităţile VT au (la fel ca şi unităţile TU din sistemul SDH) un POH pe 4 octeţi, şi un
poantor format tot din 4 octeţi.
o POH şi poantorul sunt distribuiţi pe patru unităţi VT succesive.
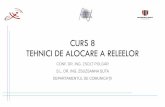
o Grup de unităţi de afluent VTG -Virtual Tributary Group – structură matricială formată din 9 linii şi 12 coloane care poate 4 unităţi VT1.5, 3 unităţi VT2, două unităţi VT3 şi o unitate VT6.
Tip VT Structură Debit VT1.5 9 linii, 3
coloane 1,728Mbps
VT2 9 linii, 4 coloane
2,304Mbps
VT3 9 linii, 6 coloane
3,456Mbps
VT6 9 linii, 12 coloane
6,912Mbps
Tab. 2 Parametrii unităţilor de afluent din sistemul de transmisie - multiplexare SONET

Fig. 3 Structura unităţilor de afluent utilizate în sistemul de transmisie – multiplexare SONET
1 2 3
4
27
1 2 3 4
36
1 2 3
4
54
1 2 3 4
108
1
4
25
2
5
26
3
6
27
1
7
49
2
8
50
3
9
51
4
10
52
5
11
53
6
12
54
1
13
97
2
14
98
3
15
99
4
16
100
5
17
101
6
18
102
7
19
103
8
20
104
9
21
105
10
22
106
11
23
107
12
24
108
1
5
33
2
6
34
3
7
35
4
8
36
27 octeţi 36 octeţi
54 octeţi
9 rânduri 9 rânduri
125µs
9 rânduri
125µs
125µs 125µs
⇒⇒⇒⇒
9 rânduri
⇒⇒⇒⇒
⇒⇒⇒⇒ ⇒⇒⇒⇒
VT3 VT6
VT1.5 VT2
108 octeţi
Schema de multiplexare sincronă SDH/SONET
o Multiplexarea sincronă implică în general următoarele operaţii:
• asamblarea fluxurilor de date plesiocrone sau generate de alte surse în containere corespunzătoare;
• alcătuirea containerelor virtuale prin ataşarea „overhead-ului” de cale (POH);
• alcătuirea unităţilor de afluent prin utilizarea unor poantori şi inserarea containerelor la poziţia potrivită în aceste unităţi;
• alcătuirea unităţilor administrative în mod asemănător cu unităţile de afluent;
• alcătuirea cadrului de transport de bază şi în final multiplexarea mai multor cadre de bază într-un cadru de transport de ordin superior;

Multiplexarea în sistemul SDH
o schema de multiplexare SDH pentru fluxuri de date plesiocrone. o Multiplexarea containerului C4 în cadrul STM-N.
• Operaţiile care se execută în acest caz sunt următoarele: semnalul afluent plesiocron cu debitul de 139,264Mbps este asamblat într-un container C-4 → se generează VC-4 prin adăugarea POH → se adaugă poantorul AU la VC-4 şi se obţine AU-4 → unitatea administrativă AU-4 este convertită într-o structură AUG, structură ce cuprinde blocul de 9 rânduri, 261 coloane şi în rândul 4 un număr de 9 octeţi adiţionali pentru poantorul AU → AUG se inserează într-un STM-1.
AUG
STM-N
AU-4
VC-4
C-4 139,264 Mbps
N=1, 4, 16
xN x1
Fig. 5 Multiplexarea containerului C4 în cadrul STM-N
Fig. 4 Schema completă de multiplexare SDH
AUG
TUG3
TUG2
STM-N
AU-4
AU-3
VC-4
VC-3
C-4
C-2
C-12
C-11
VC-2
VC-12
VC-11
VC-3
TU-2
TU-12
TU-12
TU-3
C-3
139,264 Mbps
44,736 Mbps
34,368 Mbps
6,312 Mbps
2,048 Mbps
1,544 Mbps
Debite non-ierarhice
N=1, 4, 16
xN
x7
x3
x3
x7
x3
x4
x1
x1
x1
procesare poantor

J 1
B 3
C 2
G 1
F 2
H 4
Z 3
K 3
Z 5
C 4 V C 4 P O H
H 3 H 3 H 3 1 1 H 2 Y Y H 1
n u ex is tă re la ţie d e fază f ix ă
1 2 6 1
re la ţie d e fază fix ă
A U 4
A U G
Fig. 6 Multiplexarea unui container C4 într-o unitate AUG. Ajustările de fază legate de această operaţie şi alcătuirea poantorului AUG
RSOH
MSOH
1 9
1 9
1 9
AUG 1 AUG 2 AUG N
N × 9 N × 261 ; STM-N
Fig. 7 Multiplexarea unităţilor AUG într-un cadru de transport STM-N

o Multiplexarea directă a containerului C3 în cadrul STM-N.
• Containerele VC3 se transformă în unităţi AU3 prin adăugarea poantorului AU3 format din trei octeţi, poantor care stabileşte poziţia (faza) fiecărui VC3 în cadrul STM-1.
• Unităţile AU3 au aceeaşi fază fixă faţă de începutul cadrului STM-1.
• Structura AUG se obţine prin multiplexarea a trei AU3 octet cu octet.
• Unitatea AUG generată se poate mapa direct într-un cadru STM-1, sau se pot multiplexa N unităţi AUG octet cu octet într-un cadru STM-N, neavând nici o importanţă dacă AUG conţine AU3 sau AU4.
J1
B3
C2
G1
F2
H4
Z3
K3
Z5
VC3 POH
H1 H2 H1
nu există relaţie de fază fixă
1 30 59 87
relaţie de fază fixă
AU3
A
AUG
H3 H3 H3 H2 H2
H2 H1 H1
H1
VC3 J1
B3
C2
G1
F2
H4
Z3
K3
Z5
VC3 POH
H1 H2 H1
nu există relaţie de fază fixă
relaţie de fază fixă
AU3
B
VC3 1 30 59 87
J1
B3
C2
G1
F2
H4
Z3
K3
Z5
VC3 POH
H1 H2 H1
nu există relaţie de fază fixă
1 30 59 87
relaţie de fază fixă
AU3
C
VC3
A
B
C
A
B
C
A
B
C
Fig. 9 Detalii legate de multiplexarea containerelor C3 în unităţile AUG
AUG
STM-N
AU-3
VC-3
C-3
44,736 Mbps
34,368 Mbps N = 1, 4, 16
xN x3
Fig. 8 Multiplexarea containerului C3 în cadrul STM-N

o Multiplexarea indirectă a containerului C3 în cadrul STM-N. Schema de multiplexare pentru această situaţie este dată în figura 8.28.
• Semnalul 34,368Mbps (sau 44.736Mbps) este asamblat în containerul C3 → apoi se generează containerul virtual VC3 (format din 9 linii şi 85 de coloane) prin adăugarea POH → asociind lui VC3 un poantor se generează unitatea de afluent TU3 (86 de coloane şi 9 rânduri) → unitatea de afluent TU3 generează o unitate TUG3 (TUG3 este practic identic cu TU3) şi 3 unităţi TUG3 se pot multiplexa într-un container C4 → se formează containerul virtual VC4 prin adăugarea POH → se inserează VC-4 într-un cadru STM-1 sau STM-N.
• Cele trei unităţi TUG3 se multiplexează în containerul C4 octet cu octet, TUG3 având o poziţie fixă faţă de VC4.
• Poziţia containerului VC3 în unitatea TUG3 este stabilită de poantorul TU3 ce include 3 octeţi.
H1
H2
H3
S T U F F I N G
Payload C3
J1
B3
C2
G1
F2
H4
Z3
K3
Z5
TUG3 86 coloane
VC3 85 coloane
pointer TU3
POH VC3 Fig. 11 Structura unităţii
TUG şi inserarea unui container C3 în această unitate
T U G 3
A
T U G 3
B
T U G 3
C
1 86 1 86 1 86
V C 4
P OH
A
B
C
A
B
C
A
B
C
A
B
C
A
B
C
in fo rm a ţie d e co m p le tare
1 2 3 4 5 6 7 8 2 6 1
Fig. 12 Multiplexarea unităţilor TUG3 într-un container VC-4
AUG
TUG3
STM-N
AU-4
VC-4
VC-3
TU-3
C-3
44,736 Mbps
34,368 Mbps
N = 1, 4, 16
xN
x3
x1
x1
Fig. 10 Multiplexarea indirectă a containerului C3 în cadrul de transport STM-N

o Multiplexarea containerelor C11, C12 şi C2 în unitatea TUG2. • În funcţie de debit, semnalele sunt asamblate în containere C de dimensiunile corespunzătoare → containerele virtuale sunt generate adăugând POH → se generează unităţile TU11, TU12 şi TU2 prin adăugarea poantorilor (atât POH cât şi poantorul se întind pe patru unităţi TU, fiecare unitate având doar câte un singur octet pentru POH şi poantor) → unităţile TU11, TU12 sau TU2 se multiplexează într-un grup de unităţi de afluent TUG2 coloană cu coloană - există o relaţie de fază fixă între TUG2 şi unităţile TU multiplexate în aceasta.
o Multiplexarea grupelor de unităţi de afluent TUG2 în grupe de unităţi de afluent TUG3 (fig. 14).
• O unitate TUG3 se poate forma prin multiplexarea a şapte unităţi TUG2 octet cu octet.
• În prima coloană a unităţii TUG3 sunt rezervate poziţii pentru poantorul TU3 - deoarece este o relaţie de fază fixă între TUG2 şi TUG3 nu mai este necesar acest poantor şi această poziţie este ocupată de un indicator de poantor zero (NPI – Null Pointer Indicator).
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
1
2
3
1
2
3
1
2
3
TU11 TU12 TU2
TUG2
1 2 3 7
1
2
3
4
5
6
7
NPI
completare
1
2
3
4
5
6
7
1
2
3
4
5
6
7
1
2
3
4
5
6
7
TUG3
1 2 3 4 5 6 7 8 9 10 86
Fig. 14 Multiplexarea unităţilor de afluent TU în unităţile de grupuri de afluent TUG2 şi apoi în unitatea TUG3
Fig. 13 Multiplexarea containerelor C11, C12 şi C2 în unitatea TUG2
TUG3
TUG2
VC-3
C-2
C-12
C-11
VC-2
VC-12
VC-11
TU-2
TU-12
TU-12
6,312 Mbps
2,048 Mbps
1,544 Mbps
Debite non-ierarhice
x7
x7 x3
x4
x1

o Multiplexarea grupelor de unităţi de afluent TUG2 în containere VC3 (fig. 15)
• Un container virtual VC3 se poate genera prin multiplexarea a 7 unităţi TUG2 octet cu octet; multiplexarea unităţilor TUG2 se realizează în coloanele 2 – 85, în coloana 1 fiind ocupat de POH al containerului VC3.
EXEMPLE 1. multiplexarea unui flux de 140Mbps într-un cadru STM-1.
2. multiplexarea unor fluxuri de 2,048Mbps într-un cadru STM-1.
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
1
2
3
1
2
3
1
2
3
TU11 TU12 TU2
TUG2
1 2 3 7
1
2
3
4
5
6
7
VC3 POH
1
2
3
4
5
6
7
1
2
3
4
5
6
7
1
2
3
4
5
6
7
VC3
1 2 3 4 5 6 7 8 9 10 85
Fig. 15 Multiplexarea unităţilor de afluent TU în unităţile de grupuri de afluent TUG2 şi apoi într-un container C3
Fig. 16 Multiplexarea unui afluent plesiocron de 140Mbps într-un cadru de transport STM-1

Fig. 17 Multiplexarea unor afluenţi plesiocroni de 2Mbps într-un cadru de transport STM-1
C2
C2
C2
C2
1 12 1 12 1 12 1 12
125µs 125µs 125µs 1 25µs
VC2
VC2
VC2
VC2
1 12 1 12 1 12 1 12
K4
V5
J2
Z6
multicadru TU2
TU2
TU2
TU2
TU2 V1 V3 V4
K4
1 12 1 12 1 12 1 12
V1 V2 V5
pointer
TUG2
TUG2
TUG2
TUG2 V1 V3 V4
1 12 1 12 1 12 1 12
V1 V2 V5
TUG2
1 87 1 87 1 87 1 87
V1 V2 V3 V4 V1
POH 125µs POH 125µs POH 125µs POH 125µs H4=xxxxxx01 H4=xxxxxx10 H4=xxxxxx11 H4=xxxxxx00
VC3
VC3
VC3
VC3
Fig. 18 Alcătuirea unui multicadru TU2, generarea unităţilor TUG2 în această situaţie şi multiplexarea unităţilor TUG2 în containere VC3.

Multiplexarea în sistemul SONET o schema de multiplexare SONET, pentru fluxuri de date plesiocrone o Fluxurile plesiocrone cu debite de 1,5Mbps (cadru PCM primar DS1), 2Mpbs (cadru PCM primar E1) şi 6Mbps (cadru PDH secundar DS2) se inserează în unităţile VT1.5, VT2 şi VT6 → unităţile VT formează un grup VTG → unităţile VTG se multiplexează coloană cu coloană în SPE („Synchronous Payload Envelope”) → cadrul de transport STS-1 se formează din unitatea SPE prin adăugarea unui poantor şi a unui „Section Overhead” – SOH.
o Inserarea unui flux de 45Mbps ce cuprinde nivelului trei PDH (European + American) se poate insera direct în unitatea SPE, iar un flux de 140Mbps ce cuprinde nivelul patru PDH (European + American) se poate insera în trei unităţi SPE concatenate.
o Diferenţa dintre unităţile OC-x şi STS-x constă doar în tipul de purtător, unităţile OC fiind transmise pe purtătoare optică, iar unităţile STS pe unitate electrică.
OC-192
OC-48
OC-12
STS-12
OC-3
OC-1
STS-3
STS-1
SPE-3c
SPE-1
VT group
VT-6
VT-2
VT-1.5
140
Mbps
45 Mbps
6 Mbps
2 Mbps
1.5
Mbps
10 Gbps
2.5 Gbps
622 Mbps
155 Mbps
52 Mbps
x4 x16 x64
x4
x4
x3
x7
x4
x3
Fig. 19 Strategia de multiplexare SONET

Fig. 20 Alcătuirea grupurilor de unităţi de afluent VTG în cazul ierarhiei SONET
1
4
25
2
5
26
3
6
27
9 rânduri
1
5
33
2
6
34
3
7
35
4
8
36
9 rânduri
1
7
49
2
8
50
3
9
51
4
10
52
5
11
53
6
12
54
9 rânduri
1
2
3
4
5
6
7
8
9
O O A
B
C
D
A
B
C
D
A
B
C
D
9 rânduri
X
Y
Z
X
Y
Z
X
Y
Z
X
Y
Z
O O O O O O O O O O M
N
M
N
M
N
M
N
M
N
M
N
A
X
M
O
B
Y
N
O
C
Z
M
O
D
X
N
O
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 80 81 82 83 84 85 86 87
A
Z
M
O
B
X
N
O
C
Y
M
O
D
Z
N
O
VTG12=4××××VT1.5 (A, B, C, D) VTG12=3××××VT2 (X, Y, Z) VTG12=2××××VT3 (M, N) VTG12=1××××VT6 (O)
VT 1.5 VT 1.5 VT 2 VT 3 VT 6

Curs 14 Informaţia de „overhead” utilizată pentru controlul transmiterii informaţiei în reţelele sincrone SDH/SONET
Secţiunile SDH/SONET. Monitorizarea erorilor
o Sunt două secţiuni care caracterizează transmisia cadrelor de transport SDH/SONET, şi anume: secţiunea regenerator – localizată între două regeneratoare consecutive – şi secţiunea multiplexor – localizată între două multiplexoare consecutives.
o Informaţiile de management şi de control necesare pentru transmisia pe aceste secţiuni sunt incluse în „section overhead”, SOH, asociat cadrului de transport.
• SOH este divizat în două grupe şi anume: RSOH – „Regenerator Section Overhead” – şi MSOH – „Multiplex Section Overhead”.
o Spre deosebire de sistemele PDH, regeneratoarele sistemelor sincrone controlează calitatea transmisiei şi defectele de pe linie, informaţia necesară pentru aceste operaţii fiind inclusă în RSOH – este procesat în fiecare regenerator.
• Informaţia inclusă în MSOH este procesată numai în multiplexoare, această informaţie fiind transmisă nealterată prin regeneratoare.
o Secţiunile prezentate sunt componente ale căilor de transmisie ale containerelor, căi delimitate de punctele de generare şi de destinaţie ale containerelor.
o Informaţia necesară pentru managementul şi controlul transmisiei pe aceste căi este inclus în structura „path overhead”, POH, a containerelor.
Fig. 1 Secţiuni asociate transmisiei / multiplexării SDH
C3
asamblare VC3
asamblare
VC4
asamblare VC11 VC12 VC2
asamblare VC3 VC4
C11 C12 C2
C3 C4
multiplexor
STM1
C3
asamblare VC3
asamblare
VC4
asamblare VC11 VC12 VC2
asamblare VC3 VC4
C11 C12 C2
C3 C4
multiplexor
STM1
regeneratoare
VC11, VC12, VC2 POH
VC3, VC4 POH
STM-N MSOH
STM-N RSOH
secţiune regenerator
secţiune multiplex
căi de ordin inferior căi de ordin superior

• Există căi de ordin inferior şi superior, diferenţele dintre aceste căi fiind debitele asociate acestor structuri şi modul de inserare a acestor unităţi în cadrele de transport – vezi fig. 1
• În cazul sistemului SONET căile de ordin inferior sunt asociate unităţilor VT1.5, VT2, VT3 şi VT6, iar căile de ordin superior sunt asociate unităţii SPE.
o Controlul calităţii transmisiei pe secţiunile SDH/SONET este realizată prin monitorizarea erorii de bit utilizând metoda BIP-X („Bit Interleaved Parity-X”).
• Metoda constă în adunarea biţilor dintr-un cadru de transport de la un anumit nivel ierarhic sau container din X în X poziţii (vezi figura 2), adunare în urma căruia rezultă o structură de detecţie a erorilor transmisiei;
• Este vorba practic de o metodă de tip paritate (pară), iar valoarea lui X poate fi 2, 8 sau 24; rezultatul obţinut este transmis în „overhead-ul” următorului cadru sau container la receptor unde BIP-X este recalculat.
• Este posibil să se identifice un număr maxim de X erori; X este 2 pentru containerele de ordin inferior, este 8 pentru containerele de ordin superior şi pentru RSOH şi este 24 pentru MSOH; înainte de transmisie biţii sunt aleatorizaţi cu ajutorul unui scrambler, BIP-X este calculat înainte de scrambler şi este inserat în cadrul următor tot înainte de scrambler.
Informaţia de „Overhead” asociată cadrelor de transport SDH/SONET
o „Section Overhead” (SOH) împreună cu datele utile („payload”) formează cadrul STM-N al sistemului SDH; structura include informaţii necesare pentru sincronizare de cadru, operaţii de întreţinere, monitorizarea erorilor şi pentru alte funcţii.
• Este compus dintr-un bloc format format din 9 rânduri şi N*9 coloane (N=1,4,16); SOH este compus din „Regenerator Section Overhead” (RSOH) – format din rândurile 1 - 3 şi procesat în regeneratoare – şi „Multiplex Section Overhead” (MSOH) – format din rândurile 5 - 9 şi procesat în multiplexoare; între aceste structuri, în rândul 4 este plasat pointerul AU.
1
1
0
1
0
0
1
1
1 1 1 1 0 1 1 1 0 1 1 0 1 1 0 1 1 0 1 1 0 0 0 1 1
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
1
valoare B IP-8
sem nal ST M 1
Fig. 2 Algoritm de calcul BIP-8

o Structura octeţilor din „Regenerator Section Overhead” (RSOH):
• A1, A2 – semnal de aliniere cadru A1=1 1 1 1 0 1 1 0 ; A2=0 0 1 0 1 0 0 0.
• C1 – identificare STM-N – se poate utiliza pentru a verifica o conexiune STM-N între două multiplexoare.
• B1 - monitorizare BIP-8 – definit numai în STM-1. Este utilizat pentru monitorizarea erorii în regeneratoare, se calculează pe toţi biţii din cadrul STM-N asigurându-se o paritate pară şi este inserat în cadrul următor.
• E1 - canal de serviciu regenerator – definit numai în STM-1. Se utilizează pentru crearea unui canal vocal de serviciu cu debitul de 64kbps, accesibil în toate regeneratoarele şi în multiplexoarele asociate.
• F1 – canal utilizator – definit numai în STM-1. Este rezervat pentru operare reţea, fiind accesibil în toate regeneratoarele şi în multiplexoarele asociate.
• D1 , D2 , D3 – canal de comunicaţie de date - definit numai în STM-1. Formează un canal de date comun DCCR cu un debit de 192kbps, canal destinat secţiunii de regenerare şi utilizat pentru schimbul informaţiilor de management.
o Structura octeţilor din „Multiplex Section Overhead” (MSOH):
• B2 – monitorizare BIP-N*24 – N*3 octeţi pentru monitorizarea erorii în secţiunea de multiplexare. Este calculat astfel încât să se obţină o paritate pară pe toţi biţii cadrului STM-N curent, cu excepţia RSOH şi se inserează în cadrul următor.
• K1 , K2 – comutare de protecţie automată – definit numai în STM-1. Se utilizează pentru controlul procesului de comutare de protecţie automată, structura acestor octeţi este definită pentru diferite configuraţii de protecţie (1+1 , 1:n). Biţii 3, 7 şi 8 ai lui K2 nu sunt rezervaţi pentru aplicaţii ulterioare.
• D4...D12 – canal de comunicaţii de date DCC. Aceşti 8 octeţi formează un canal de date comun DCCM pentru secţiunea de multiplexare cu un debit de 576kbps.
• S1 – stare sincronizare – definit numai în STM-1. Informează operatorul despre performanţele tactului utilizate în unitate.
• Z1 , Z2 – N*4 octeţi rezervaţi pentru aplicaţii ulterioare.
• M1 – indicare eroare distantă pentru secţiunea de multiplexare.
• E2 – canal de serviciu multiplexor – definit numai în STM-1. Formează un canal vocal de serviciu accesibil numai în multiplexoare.
A 1 A 1 A 1 A 2 A 2 A 2 C 1
B 1 E 1 F 1
D 1 D 2 D 3
H 1 H 1 H 1 H 2 H 2 H 2 H 3 H 3 H 3
B 2 B 2 B 2 K 1 K 2
D 4 D 5 D 6
D 7 D 8 D 9
D 10 D 11 D 12
S 1 Z 1 Z 1 Z 2 Z 2 M 1 E 2
A U 4 261 b y ţi
R SO H
M S O H
pointer
J 1
B 3
C 2
G 1
F 2
H 4
Z 3
K 3
Z 5
Payload C 4
V C 4
P O H V C 4
Fig. 3 Structura SOH a cadrului de transport STM-1 a sistemului SDH şi structura POH a containerului C4.

o „Transport Overhead” (SOH) împreună cu datele utile (SPE) formează un cadru STS-1 al sistemului SONET.
• Dimensiunea „overhead-ului” este de trei ori mai mică decât dimensiunea SOH a sistemului SDH.
• Diferenţele esenţiale constau în faptul că pointerul are numai 3 byţi, monitorizarea erorilor în MSOH (numit „Line Overhead”) este realizat cu ajutorul unui singur byte, semnalul de sincronizarea de cadru este compus numai din 2 byţi şi lipsesc câţiva din octeţii rezervaţi din SOH STM-1.
o „Path Overhead” (POH) împreună cu containerul C formează containerul virtual VC;
pentru containerele de ordin superior sunt disponibili 9 octeţi (o coloană) per container, iar pentru containerele de ordin inferior este disponibil numai un octet per container.
o POH este compus în momentul generării containerului şi rămâne neschimbat până când containerul este dezasamblat; POH este acelaşi pentru containerele SDH şi SONET atât pentru containerele de ordin inferior cât şi cele de ordin superior.
o Octeţii din structura containerelor de ordin superior sunt definiţi astfel:
• J1 – verificare cale – este punctul de acces al containerului virtual şi se poate utiliza pentru transmiterea unei telegrame repetitive de 64 octeţi sau a uneia de 16 octeţi, telegrame cu care se poate verifica legătura pe întreg parcursul său.
• B3 – monitorizare BIP-8 – monitorizare eroare pe toată legătura. Se calculează pe toţi biţii VC3 sau VC4 şi este inserat în POH container trimis în cadrul următor.
• C2 – identificator al conţinutului VC – vezi tabelul 1.
Fig. 4 Structura SOH a cadrelor de transport STS-1 din sistemul SONET şi a POH asociat containerului SPE.
Transport overhead Path overhead
Section overhead
Line overhead
A1 A2 J0/Z0 J1
B1 E1 F1 B3
D1 D2 D3 C2
H1 H2 H3 G1
B2 K1 K2 F2
D4 D5 D6 H4
D7 D8 D9 Z3
D10 D11 D12 Z4
S1/Z1 M0 or M1/Z2 D12 Z5
1
2
3
4
5
6
7
8
9

Man – Metropolitan Area Network DQDB – Dual Queue Dual Bus FDDI – Fiber Distributed Data Interface
• G1 – stare cale – prin acest octet se trimit de la sursă către destinaţie date legate de calitatea transmisiei, fiind posibilă monitorizarea căii între cele două capete; structura acestui octet este dată în figura 5. � Biţii 1-4 (REI) - indicare eroare distantă – valoarea binară corespunde numărului de
violări de paritate detectate în BIP-8 B3. Numerele mai mari de 8 se consideră zero. � Bitul 5 – indicare defect distant – se returnează dacă la recepţie nu se recepţionează un
semnal valid. � Biţii 6-8 nu sunt definiţi.
• F2 – canal utilizator – canal de 64kbps disponibil pentru comunicaţie între capetele căii.
• H4 – indicator multicadru – utilizat pentru sincronizare multicadrelor de ordin inferior.
• Z3 – canal utilizator - canal de 64kbps disponibil pentru comunicaţie între capetele căii
• K3 – comutare de protecţie automată – biţii 1-4 asigură controlul procesului de comutare de protecţie automată la nivelele de ordin superior ; biţii 5-8 sunt rezervaţi.
• Z5 – byte operator reţea – este asigura pentru scopuri de management
o POH asociat containerelor de ordin redus (VC-1/VC-2) – este compus din octeţii V5, J2, Z6, K4.
• V5 este primul octet din containerele de ordin inferior, fiind punctul de referinţă pentru aceste containere. Cu acest octet se pot transmite următoarele informaţii:
MSB 1 2 3 4
LSB 1 2 3 4
Cod hexa Explicaţii
0 0 0 0 0 0 0 0 0 0 Neechipat 0 0 0 0 0 0 0 1 0 1 Echipat-nespecific 0 0 0 0 0 0 1 0 0 2 Structură TUG 0 0 0 0 0 0 1 1 0 3 TUG blocat 0 0 0 0 0 1 0 0 0 4 Mapare asincronă a debitului de 34,368kbps
sau de 44,736kbps în container C3 0 0 0 1 0 0 1 0 1 2 Mapare asincronă a debitului de 136,264kbps
în container C4 0 0 0 1 0 0 1 1 1 3 Mapare ATM 0 0 0 1 0 1 0 0 1 4 Mapare MAN (DQDB) 0 0 0 1 0 1 0 1 1 5 Mapare FDDI
R E I R D I
1 2
3 4 N eutilizat
1 2
3
Tab. 1 Structura octetului C2 din POH a containerelor SDH corespunzătoare căilor superioare
Fig. 5 Structura octetului G1 din POH containere SDH corespunzătoare căilor superioare
B IP-2 REI
3 1 2
Etichetă
5 6
7 RFI
4
RD I
8
Fig. 6 Structura octetului V5 din POH containere SDH corespunzătoare căilor inferioare

� Bit 1, 2 – monitorizare BIP-2 – se utilizează pentru monitorizare erorilor de-a
lungul căilor de ordin inferior. Se lucrează cu o paritate pară, se includ şi octeţii POH fără octeţii V1 – V4 ai poantorului TU. Dacă se transmite informaţie în octetul V3, în procesul de dopare negativă, acest octet este luat în calcul.
� Bit 3 – indicare de eroare distantă (REI – „Remote Error Indication”) – indică apariţia unor violări ale lui BIP-2.
� Bit 4 – indicare defect distant (RFI – „Remote Failure Indication”).
� Biţii 5,6,7 – identificator conţinutul containerului – corespund octetului C2 din POH containere de ordin superior, semnificaţia acestor biţi fiind dat în tabelul 2
� Bit 8 – indicare defect cale distant (RDI).
• J2 – urmărire cale – identic cu J1 din POH de ordin superior. Se transmite o telegramă pe 16 octeţi utilizată pentru verificarea legăturii pe toată calea de comunicaţie.
• K4 – biţii 1-4 asigură controlul comutaţiei de protecţie automată la nivel inferior. Biţii 5-8 nu sunt utilizaţi.
• Z6 – neutilizat
bit 5 bit 6 bit 7 Explicaţii 0 0 0 Neechipat 0 0 1 Echipat-nespecific 0 1 0 Asincron 0 1 1 Sincron la nivel de bit 1 0 0 Sincron la nivel de octet 1 0 1 1 1 0 1 1 1
Echipat - neutilizat
Tab. 2 Structura octetului V5 din POH a containerelor SDH corespunzătoare căilor inferioare

Poantori şi operaţii cu poantori în sistemele de transmisie-multiplexare sincrone SDH/SONET
o Poantorii utilizaţi în unităţile administrative şi în unităţile de afluent ale sistemelor sincrone SDH/SONET au două roluri principale şi anume:
• stabilirea relaţiei de fază (adică poziţia relativă) dintre containerele cu date utile şi unităţile administrative şi de afluent, stabilindu-se astfel relaţia de fază (adică poziţia relativă) dintre containerele cu date utile şi cadrul de transport;
• adaptarea de viteză dintre fluxurile de date recepţionate de un multiplexor şi fluxul transmis de acesta în situaţia întreruperii legăturii de sincronizare;
� stabilirea dinamică a poziţiei containerelor cu date utile în diferite unităţi şi implicit în cadrul de transport asigură o inserare / extragere uşoară a diferitelor fluxuri elementare în / din cadrul de transport, fără a fi necesară demultiplexare şi remultiplexarea întregului flux multiplex, situaţie întâlnită în cazul sistemelor de transmisie-multiplexare PDH;
� se asigură o utilizare flexibilă şi eficientă a capacităţii de transmisie şi se asigură capacităţi de transmisie pentru o multitudine de servicii cu diferite caracteristici;
� containerul inserat în cadrul de transport poate începe oriunde (practic pot fi unele restricţii), poziţia de început fiind dată de valoarea poantorului şi containerul se poate întinde peste două cadre de transport sau peste două unităţi (administrative sau de afluent după caz).
o Poantorul conţine trei sau patru octeţi, trei octeţi în cazul unităţilor administrative SDH şi patru octeţi în cazul unităţilor de afluent SDH; doar primii doi octeţi, H1 şi H2 în cazul considerat, dau poziţia de început a containerului, octetul al treilea fiind rezervat pentru operaţiile de dopare negativă (octetul H3 în exemplul considerat), iar al patrulea octet, dacă există, nu are un rol definit.
• în SOH STM-1 sunt 9 octeţi rezervaţi pentru poantor; dacă în STM-1 se încarcă un container VC4 avem un singur poantor pe doi octeţi plus trei poziţii de dopare (restul octeţilor nu se utilizează) – poziţiile din AU4 sunt formate din trei octeţi în acest caz,
Cadru n
Cadru n+1
Poantor
Poantor
cadru STM-1 1 9 270
125 µµµµs
250 µµµµs Fig. 7 Stabilirea poziţiei unui container VC4 faţă de începutul cadrului de transport STM-1 prin utilizarea poantorului AU4
H1 H2 H3
H1 H2 H3
Început containerVC4

iar dacă se încarcă trei containere VC3 se utilizează trei poantori – poziţiile din AU3 sunt formate dintr-un singur octet.
o Introducerea poantorilor în sistemele SDH/SONET creează posibilitatea menţinerii caracterului sincron al legăturii în situaţia în care se întrerupe legătura de tact;
• Se utilizează doparea pozitivă sau negativă în funcţie de diferenţa dintre valoarea tactului local şi cel al fluxul de intrare (octetul H3 din poantor facilitează doparea negativă) şi modificarea poziţiei de început a containerului în cadrul de transport (sau în alte unităţi SDH/SONET, adică unităţi administrative sau de afluent);
• Modul de realizare a procesul de dopare pozitivă şi negativă se exemplifică în figurile 10 şi 11, considerându-se cazul unui cadru de transport STM-1 în care se inserează un container VC4;
� figura 10 prezintă situaţia în care frecvenţa tactului local al multiplexorului este mai mare decât frecvenţa tactului fluxului recepţionat; corecţia de frecvenţă se realizează prin
Fig. 9 Structura poantorului AU4 şi poziţia acestora în cadrul de transport STM-1. Numerotarea poziţiilor din cadrul de transport STM-1 în cazul inserării unei unităţi AU4 în acest cadru
522 - - 523 - - 524 - - ….. 607 - - 608 - -
609 - - 610 - - 611 - - ….. 694 - - 695 - -
696 - - 697 - -
698 - - ….. 781 - - 782 - -
H1 H1 H1 H2 H2 H2 H3 H3 H3 0 - - 1 - - 2 - - ….. 85 - - 86 - -
87 - - 88 - - 89 - - ….. 172 - - 173 - -
174 - - 175 - - 176 - - ….. 259 - - 260 - -
261 - - 262 - - 263 - - ….. 346 - - 347 - -
348 - - 349 - - 350 - - ….. 433 - - 434 - -
435 - - 436 - - 437 - - ….. 520 - - 521 - -
522 - - 523 - - 524 - - ….. 607 - - 608 - -
609 - - 610 - - 611 - - ….. 694 - - 695 - -
696 - - 697 - - 698 - - ….. 781 - - 782 - -
H1 H1 H1 H2 H2 H2 H3 H3 H3 0 - - 1 - - 2 - - ….. 85 - - 86 - -
87 - - 88 - - 89 - - ….. 172 - - 173 - -
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 265 266 267 268 269 270
1
2
3
4
5
6
7
8
9
1
2
3
4
5
Fig. 8 Structura poantorilor AU3 şi poziţia acestora în cadrul de transport STM-1. Numerotarea poziţiilor din cadrul de transport STM-1 în cazul inserării a trei unităţi AU3 în acest cadru.
522 522 522 523 523 523 524 524 524 ….. 607 607 607 608 608 608
609 609 609 610 610 610 611 611 611 ….. 694 694 694 695 695 695
696 696 696 697 697 697 698 698 698 ….. 781 781 781 782 782 782
H1 H1 H1 H2 H2 H2 H3 H3 H3 0 0 0 1 1 1 2 2 2 ….. 85 85 85 86 86 86
87 87 87 88 88 88 89 89 89 ….. 172 172 172 173 173 173
174 174 174 175 175 175 176 176 176 ….. 259 259 259 260 260 260
261 261 261 262 262 262 263 263 263 ….. 346 346 346 347 347 347
348 348 348 349 349 349 350 350 350 ….. 433 433 433 434 434 434
435 435 435 436 436 436 437 437 437 ….. 520 520 520 521 521 521
522 522 522 523 523 523 524 524 524 ….. 607 607 607 608 608 608
609 609 609 610 610 610 611 611 611 ….. 694 694 694 695 695 695
696 696 696 697 697 697 698 698 698 ….. 781 781 781 782 782 782
H1 H1 H1 H2 H2 H2 H3 H3 H3 0 0 0 1 1 1 2 2 2 ….. 85 85 85 86 86 86
87 87 87 88 88 88 89 89 89 ….. 172 172 172 173 173 173
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 265 266 267 268 269 270
1
2
3
4
5
6
7
8
9
1
2
3
4
5

utilizarea dopării pozitive şi creşterea valorii poantorului cu o unitate; Doparea se realizează la nivel de octet, poziţia de dopare fiind prima poziţie după octetul H3, iar poziţia de început a containerului după momentul dopării se măreşte cu o unitate.
� figura 11 prezintă situaţia în care frecvenţa tactului local al multiplexorului este mai mică decât frecvenţa tactului fluxului recepţionat; Corecţia de frecvenţă se realizează prin utilizarea dopării negative şi reducerii valorii poantorului cu o unitate; Doparea se realizează la nivel de octet, poziţia de dopare fiind cea ocupată de octetul H3, iar poziţia de început a containerului după momentul dopării scade cu o unitate.
Fig. 10 Ajustarea de debit dintre cadrul de transport STM-1 al unui multiplexor şi un container VC4 recepţionat de multiplexor cu o frecvenţă de tact mai redusă decât tactul local
Cadru n
Cadru n+1
Cadru n+2
Cadru n+3
Poantor valoare P
Poantor valoare P
Poantor nou valoare P+1
Poantor valoare P+1
byte dopare pozitivă
125 µµµµs
250 µµµµs
375 µµµµs
500 µµµµs
cadru STM-1 1 9 270
H1 H2 H3
H1 H2 H3
H1 H2 H3
H1 H2 H3
început VC4
octet de dopare pozitivă
Cadru n
Cadru n+1
Cadru n+2
Cadru n+3
Poantor valoare P
Poantor valoare P
Poantor nou valoare P-1
Poantor valoare P-1
byte dopare pozitivă
125 µµµµs
250 µµµµs
375 µµµµs
500 µµµµs
cadru STM-1 1 9 270
H1 H2 H3
H1 H2 H3
H1 H2 H3
H1 H2 H3
început VC4
octet de dopare negativă
Fig. 11 Ajustarea de debit dintre cadrul de transport STM-1 al unui multiplexor şi un container VC4 recepţionat de multiplexor cu o frecvenţă de tact mai mare decât tactul local

Structura poantorului SDH
o Semnificaţia biţilor cuvântului pe 16 biţi format din octeţii H1 şi H2 este următoarea:
• biţii 1 – 4 formează aşa numitul NDF (New Data Flag) care indică modificarea valorii poantorului. Sunt definite două valori şi nume NDF=0110 (dezactivat) – se menţine valoarea poantorului- şi NDF=1001 (activ) – se setează o nouă valoare a poantorului;
• biţii 5 şi 6 numiţi S S sunt setaţi la 1 0 – identifică tipul de poantor;
• biţii 7 – 16 reprezintă valoarea poantorului;
� dacă se atribuie o nouă valoare pentru poantor atunci biţii 7 – 16 conţin efectiv valoarea poantorului;
� dacă este vorba de adaptare de frecvenţă şi valoarea poantorului trebuie incrementată sau decrementată, atunci biţii 7 – 16 se împart în două grupe, de incrementare (I) respectiv de decrementare (D). Există 5 biţi în fiecare grupă şi dacă poantorul trebuie incrementat se inversează biţii I, iar dacă poantorul trebuie decrementat se inversează biţii D. Identificarea operaţiei de incrementare sau decrementare a poantorului se ia recepţie pe baza unei logici majoritare care urmăreşte modificarea biţilor I şi D. Această metodă de semnalizare a modificării poantorului asigură o anumită protecţie la erori în cazul unui canal cu probabilitate redusă de eroare pe bit, protecţie la erori necesară datorită modificării frecvente a valorii poantorului dacă se realizează adaptare de viteză. Există şi o anumită protecţie la erori a grupului de biţi NDF, distanţa Hamming dintre codurile asociate stării de activ şi inactiv fiind 4.
� modificarea valorii poantorului prin setarea unei valori sau prin incrementare / decrementare se poate realiza cel mult o dată la patru unităţi. Dacă avem o ajustare de poantor într-o unitate sau cadru de transport atunci în următoarele trei unităţi sau cadre de transport nu se permit operaţii cu poantori regulate sau alinieri ale cadrelor printr-un proces de dopare pozitivă sau negativă;
o În cazul concatenării mai multor unităţi AU4 primul AU4 are un poantor normal, iar următoarele AU4 includ indicarea de concatenare CI - aceste unităţi trebuie tratate la fel ca şi cel anterior; biţii H1 şi H2 sunt definiţi astfel: H1 : 1 0 0 1 S S 1 1 (S –nedefinit), H2 : 1.
o Poantorul TU3 permite o adaptare dinamică a fazei containerului VC3 la cadrul TU3. Poantorul TU3 este localizat în prima coloană a unităţii şi este compus tot din octeţii H1, H2 şi H3. Structura acestui poantor şi modul de acţiune sunt identice cu cele ale poantorilor AU prezentaţi anterior.
o Unitatea TU3 este identică ca şi dimensiuni cu unitatea TUG3; dacă în unitatea TUG3 se multiplexează unităţi TUG2, care au o fază fixă faţă de cadrul TUG3, poziţiile corespunzătoare octeţilor H1 şi H2 ai poantorului se înlocuiesc cu NPI („Null Pointer Indicator”) având structura: 1 0 0 1 S S 1 1 1 1 1 0 0 0 0 0 (S – nedefinit).
biţii 1 – 4 biţii 7 – 16
Fig. 12 Structura octeţilor H1 şi H2 din poantorul unităţilor administrative SDH
N N N N S S I D I D I D I D I D

o Poantorul TU2 permite o adaptare dinamică a fazei containerului VC2 la cadrul TU2. Acest poantor este compus din 4 octeţi: V1, V2, V3 şi V4; aceşti 4 octeţi sunt localizaţi în patru cadre TU2 consecutive, cadre care alcătuiesc un multicadru (vezi figura 14). • Octeţii V1 şi V2 sunt echivalenţi cu octeţii H1 şi H2 şi dau efectiv valoarea poantorului
vezi - figura 12; diferenţierea faţă de poanterii AU este dată de biţii S S (vezi fig. 12), care au în cazul de faţă valoarea 0 0.
• Octetul V3 se utilizează pentru operaţii de dopare negativă, asemenea octetului H3 din poantorii AU, iar structura octetului V4 nu este definită.
• Definiţia octetului poantor disponibil în cadrul TU2 curent este dat de octetul H4 – indicator de multicadru – din POH VC3 şi VC4.
o Poantorul TU11 permite o adaptare dinamică a fazei containerului VC11 la unitatea de afluent TU11. Structura acestui poantor este identică cu cea a poantorului TU2. Inserarea şi extragerea datelor dintr-un multicadru TU11 şi multiplexarea în unităţile superioare se realizează la fel ca şi în cazul unităţii TU2. Biţii S S din octetul V1 au valorile 1 1;
o Poantorul TU12 permite o adaptare dinamică a fazei containerului VC12 la cadrul TU12. Structura poantorului este identică cu ceea a poantorului TU2, iar inserarea şi extragerea datelor din multicadrul TU12, respectiv multiplexarea în unităţile superioare se realizează după cum a fost descris în cazul multicdrului TU2. Biţii S S din octetul V1 au valorile 1 0.
H1 595 596 597 598 599 600 601 602 603 ….. 674 675 676 677 678 679
H2 680 681 682 683 684 685 686 687 688 ….. 759 760 761 762 763 764
H3 0 1 2 3 4 5 6 7 8 ….. 79 80 81 82 83 84
S T U F F I N G
85 86 87 88 89 90 91 92 93 ….. 164 165 166 167 168 169
170 171 172 173 174 175 176 177 178 ….. 249 250 251 252 253 254
255 256 257 258 259 260 261 262 263 ….. 334 335 336 337 338 339
340 341 342 343 344 345 346 347 348 ….. 419 420 421 422 423 424
425 426 427 428 429 430 431 432 433 ….. 504 505 506 507 508 509
510 511 512 513 514 515 516 517 518 ….. 589 590 591 592 593 594
H1 595 596 597 598 599 600 601 602 603 ….. 674 675 676 677 678 679
H2 680 681 682 683 684 685 686 687 688 ….. 759 760 761 762 763 764
H3 0 1 2 3 4 5 6 7 8 ….. 79 80 81 82 83 84
S T
85 86 87 88 89 90 91 92 93 ….. 164 165 166 167 168 169
170 171 172 173 174 175 176 177 178 ….. 249 250 251 252 253 254
1 2 3 4 5 6 7 8 9 10 81 82 83 84 85 86
1
2
3
4
5
6
7
8
9
1
2
3
4
5
Fig. 13 Structura poantorului TU3 şi poziţia lui în această unitate. Numerotarea poziţiilor din unitatea TU3
Fig. 14 Structura poantorului TU2 şi poziţia lui în această unitate. Numerotarea poziţiilor din unitatea TU2
V1
V2
V3
V4
321
322
426
427
0
1
105
106
107
108
212
213
214
215
319
320 .... .... .... ....
Fig. 15 Structura poantorului TU11 şi poziţia lui în această unitate. Numerotarea poziţiilor din unitatea TU11
V1
V2
V3
V4
78
79
102
103
0
1
24
25
26
27
50
51
52
53
76
77 .... .... .... ....
Fig. 16 Structura poantorului TU12 şi poziţia lui în această unitate. Numerotarea poziţiilor din unitatea TU12
V1
V2
V3
V4
105
106
138
139
0
1
33
34
35
36
68
69
70
71
103
104 .... .... .... ....

o În cazul unităţilor de afluent de ordin redus inserarea şi extragerea datelor se realizează pe un multicadru format din 4 unităţi şi structura acestui multicadru este una de tip vector, aşa cum se poate vedea în figura 14. Poziţia zero în acest multicadru este prima poziţie după octetul V2 şi valoarea poantorului specifică poziţia efectivă unde se inserează grupul de patru containere C2 consecutive.
• După inserarea informaţiei utile structura de tip vector se transformă într-o structură formată din 4 matrici de dimensiune 9×12=108, fiecare matrice având pe poziţia din colţul stânga sus un octet poantor (vezi figura cu structura containerelor);
• Multiplexarea unităţilor TU2 în unităţile superioare se realizează octet cu octet şi coloană cu coloană.
• La recepţie se refac matricile TU2 din unităţile de ordin superior prin demultiplexare coloană şi coloană, se transformă grupul de 4 matrici consecutive din multicadru în structura vector din figura 14 şi se extrage informaţia începând de la poziţia indicată de pointer.
• Pentru transportul unor debite nonierahice PDH, mai multe multicadre TU2 pot fi concatenate, fiind astfel posibil transportul informaţiei utilizând debite multiplii ai debitului VC2 în containere concatenate VC2-mc;
o În cazul sistemului SONET cadrul de transport STS-1 are un poantor pe trei octeţi, asemănător cu cel al unităţilor SDH AU3. Structura acestui poantor este tot H1, H2 şi H3, cu H1 şi H2 conţinând valoarea poantorului, iar H3 destinat dopării negative. Operaţiile ce se pot efectua cu acest poantor sunt identice cu operaţiile poantorilor AU din sistemul SDH. • În cazul unităţilor de afluent VT poantorul este asemănător cu cel al unităţilor TU din
sistemul SDH. Operaţiile cu poantori VT sunt identice cu operaţiile cu poantorii TU din SDH, iar structura multicadrelor VT utilizată pentru inserarea şi extragerea datelor (structura de tip vector) este de asemenea asemănătoare cu structura multicadrelor TU.