Curs 11 Tolerante
4
Curs Toleranţe – Conf.univ.dr.ing. Liliana Popa 1 Curs 11 7.3.4 Metoda compensării (metoda reglării) Rezolvarea problemei inverse a lanțurilor de dimensiuni prin metoda compensării (reglării) are la bază introducerea la montaj, în ansamblul al cărui lanț de dimensiuni se discută, a unei piese suplimentare – compensator – care are rolul de a asigura precizia elementului de închidere, în condițiile executării în toleranţe largi, convenabile economic, ale dimensiunilor componente. Elementul compensator poate să fie fix (inele, șaibe, garnituri, bucșe) sau mobil. Compensatorii mobili pot fi cu reglare periodică (bucșe, piulițe) sau cu reglare continuă (arcuri). Fig. 7.19 Tipuri de compensatori In fig.7.19 sunt prezentate diferitele tipuri de compensatori (C) şi anume: a – compensator mobil (bucșe) cu reglare periodică, b – compensator fix, c – compensator mobil (piuliță) cu reglare periodică, d – compensator mobil (arc elicoidal) cu reglare continuă. Precizia dimensiunii de închidere R A – fig. 7.19 a şi b depind de valoarea compensatorului A C , creându-se astfel posibilitatea de obținere a dimensiunilor componente A 1 + A 4 cu toleranţe largi. Ca dezavantaj al metodei este acela ca în unele cazuri, mărirea numărului de repere în subansamblu (deci existenţa compensatorului) poate avea influenţă negativă asupra rigidității ansamblului.
-
Upload
dinu-andrei -
Category
Documents
-
view
8 -
download
3
Transcript of Curs 11 Tolerante

Curs Toleranţe – Conf.univ.dr.ing. Liliana Popa
1
Curs 11
7.3.4 Metoda compensării (metoda reglării)
Rezolvarea problemei inverse a lanțurilor de dimensiuni prin metoda
compensării (reglării) are la bază introducerea la montaj, în ansamblul al cărui lanț
de dimensiuni se discută, a unei piese suplimentare – compensator – care are rolul
de a asigura precizia elementului de închidere, în condițiile executării în toleranţe
largi, convenabile economic, ale dimensiunilor componente.
Elementul compensator poate să fie fix (inele, șaibe, garnituri, bucșe) sau
mobil.
Compensatorii mobili pot fi cu reglare periodică (bucșe, piulițe) sau cu reglare
continuă (arcuri).
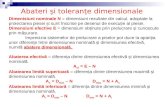
Fig. 7.19 Tipuri de compensatori
In fig.7.19 sunt prezentate diferitele tipuri de compensatori (C) şi
anume: a – compensator mobil (bucșe) cu reglare periodică, b – compensator fix, c –
compensator mobil (piuliță) cu reglare periodică, d – compensator mobil (arc
elicoidal) cu reglare continuă.
Precizia dimensiunii de închidere RA – fig. 7.19 a şi b depind de valoarea
compensatorului AC, creându-se astfel posibilitatea de obținere a dimensiunilor
componente A1 + A4 cu toleranţe largi.
Ca dezavantaj al metodei este acela ca în unele cazuri, mărirea numărului de
repere în subansamblu (deci existenţa compensatorului) poate avea influenţă
negativă asupra rigidității ansamblului.

Curs Toleranţe – Conf.univ.dr.ing. Liliana Popa
2
Metoda compensării (reglării) se poate utiliza în producția de serie mare şi
masă, având avantajul că poate fi folosită şi în cazul lucrărilor pe bandă (timpul de
montare-demontare fiind aproximativ constant) şi asigurând, în același timp,
menținerea preciziei inițiale (prin compensarea uzurii) pe durata funcționarii
subansamblului (în cazul compensatoarelor mobile).
Alte exemple de utilizare a compensatorilor pentru rezolvarea lanțurilor de
dimensiuni sunt prezentate în fig. 7.20.
Fig.7.20 Utilizarea compensatorilor
Fig. 7.20 a prezintă introducerea compensatorului fix de dimensiuni AC pentru
a obține dimensiunea de închidere RA cu precizie ridicată.
Compensatorul se execută cu diferite valori; numărul grupelor de dimensiuni
ale compensatorului se stabilește din relația:
n TC
TR (7.43)
în care: - n este numărul grupelor de dimensiuni;
-TC – mărimea maximă de compensare;
-TR – toleranţa prescrisa elementului de închidere.
În cazul unui arbore sprijinit pe trei lagăre (fig. 7.20 b), proiectantul
trebuie să prevadă posibilitatea de deplasare pe verticala a lagărelor I şi III pentru a
reduce în limitele admise necoaxialitatea RA şi respective RB ale axelor acestora cu
axa lagărului central II. Cotele de reglare sunt, în acest caz, Ac pentru lagărul I şi
respective Bc pentru lagărul III.
Fig. 7.20 c pune în evidenta rolul principal al proiectantului în adoptarea
metodei de rezolvare a lanțului de dimensiuni:
- în cazul din fig. 7.20 c1 suportul axului conducător la strung este fixat pe
batiu în faţă, permițând deplasări în condițiile x şi z;

Curs Toleranţe – Conf.univ.dr.ing. Liliana Popa
3
- în cazul din fig. 7.20 c2 suportul este așezat lateral, permițând deplasările in
direcțiile z şi y, situație mai avantajoasa, deoarece asigura închiderea lanțului de
dimensiuni din planul transversal al strungului.
7.3.5 Metoda ajustării
Metoda ajustării este o metodă de rezolvare a problemei inverse a lanțurilor
de dimensiuni in condițiile în care dimensiunile componente sunt obținute cu
tolerante convenabile din punct de vedere economic. Obținerea dimensiunii de
închidere între limitele prescrise se face prin schimbarea valorii efective a unui din
dimensiunile componente ale lanțului, prin prelucrarea suplimentara (ajustare) la
montaj a unuia din suprafețele de contact.
Metoda ajustării se aplica lanțurilor de dimensiuni de asamblare.
Pentru obținerea unor rezultate corespunzătoare la montaj este necesar să se
respecte următoarele reguli în cazul utilizării acestei metode:
- stabilirea la proiectare a piesei care urmează a fi ajustată;
- determinarea dimensiunii şi toleranţei pentru această piesă astfel încât să fie
asigurată existenţa unui strat de material minim pentru ajustare;
- piesa stabilită nu trebuie să facă parte din mai multe lanțuri de dimensiuni
legate în paralel pentru a nu introduce erori în celelalte lanțuri;
- pe desenele de execuție se va menționa indicația “ajustat la montaj”.
Fig.7.21 Lanţ de dimensiuni realizat prin ajustare
Valorile prezentate în fig 7.21 a, ceea ce conduce la realizarea unor piese cu
costuri ridicate.
Problema se poate rezolva ca în figura 7.21 b, în care dimensiunile
componente au tolerante convenabil economic, dimensiunea de închidere
obținându-se la valoarea impusă prin ajustarea piesei menționate.
Un alt exemplu este prezentat in figura 7.22. Pentru o bună funcționare este
necesar ca dimensiunea de închidere RA să rezulte între limitele RAmin - RAmax, care
conduce la toleranţe mici pentru dimensiunile componente.
Executând piesele componente cu dimensiunile A1 - A4, Având toleranţe
convenabile (deci mai mari), la montaj pot apărea trei situații:

Curs Toleranţe – Conf.univ.dr.ing. Liliana Popa
4
1. dimensiunea RA rezultă între limitele prescrise, deci RAmin ≤ RA ≤ RAmax, caz in care nu se mai intervine, subansamblul fiind corespunzător;
2. dimensiunea RA > RAmax , caz în care, de pe suprafața Y a bridei se va ajusta până se realizează RA ≤ RAmax;
3. dimensiunea RA< RAmin, situație în care se va ajusta de pe suprafaţa X a bridei până se obţine RA RAmin.
Fig.7.22 Lanţ de dimensiuni rezolvat prin ajustare
Ca dezavantaje, pe care le prezintă metoda, pot fi amintite: - ajustarea este o operație care, de regulă, se face manual, la un cost ridicat; - calitatea asamblării depinde de calificarea şi experiența lucrătorului; - cantitatea de material înlăturat diferind de la un subansamblu la altul, nu se
poate folosi în cazul montajului pe bandă. Metoda se folosește in cazul producției de serie mică şi prototip, în cazul
lanțurilor de dimensiuni formate din multe elemente (exemplul în fabricarea mașinilor
unelte).
Un asemenea exemplu este prezentat în figura 7.23 elementul de inchdere RA
reprezintă abaterea de la coaxialitate între axa arborelui principal şi axa alezajelor
pentru scule (din suportul port- cuțitului) la un strung revolver.
Fig.7.23 Lanţ de dimensiuni rezolvat prin ajustare
Elementele componente A1 + A4 nu se justifica a fi executate cu precizie
foarte ridicată, astfel încât să asigure obținerea coaxialității în limite foarte restrânse;
rezolvarea adoptată de proiectant este prescrierea unor tolerante economice pentru
dimensiunile A1 + A4 şi indicarea suprafeței X ca suprafaţă ce urmează a fi ajustată
la montaj, în funcție de mărimea obținută pentru RA.