
CONTRIBUŢII PRIVIND REZOLVAREA PROBLEMEI CONTACTULUI ... · corespunzătoare acestei clase de...
69
MINISTERUL EDUCAŢIEI, CERCETĂRII ȘI INOVĂRII UNIVERSITATEA „ŞTEFAN CEL MARE” SUCEAVA Inginer SERGIU SPÎNU CONTRIBUŢII PRIVIND REZOLVAREA PROBLEMEI CONTACTULUI NORMAL ÎN DOMENIUL ELASTO-PLASTIC REZUMATUL TEZEI DE DOCTORAT Conducător ştiinţific Prof. dr. ing. EMANUEL DIACONESCU Membru corespondent al Academiei Române SUCEAVA, 2009
Transcript of CONTRIBUŢII PRIVIND REZOLVAREA PROBLEMEI CONTACTULUI ... · corespunzătoare acestei clase de...
MINISTERUL EDUCAŢIEI, CERCETĂRII ȘI INOVĂRII
UNIVERSITATEA „ŞTEFAN CEL MARE” SUCEAVA
Inginer SERGIU SPÎNU
CONTRIBUŢII PRIVIND REZOLVAREA
PROBLEMEI CONTACTULUI NORMAL ÎN
DOMENIUL ELASTO-PLASTIC
REZUMATUL TEZEI DE DOCTORAT
Conducător ştiinţific
Prof. dr. ing. EMANUEL DIACONESCU Membru corespondent al Academiei Române
SUCEAVA, 2009
i
CUPRINS
Cuprins......................................................................................................................................................i Introducere............................................................................................................................................... v I. STADIUL ACTUAL ȘI METODE DE REZOLVARE A PROBLEMELOR
DE CONTACT ELASTIC ȘI ELASTO-PLASTIC ..................................................... 1 I.1 ELEMENTE DE TEORIA ELASTICITĂȚII.......................................................... 1
I.1.1 Ipotezele elasticităţii....................................................................................................1 I.1.2 Ecuaţia fundamentală a elastostaticii ..........................................................................1 I.1.3 Relațiile integrale de echilibru ....................................................................................2 I.1.4 Metodica generală de rezolvare a problemelor de elastostatică ..................................3
I.2 ELEMENTE DE TEORIA PLASTICITĂȚII .......................................................... 3 I.2.1 Comportarea elasto-plastică ........................................................................................3 I.2.2 Criterii de plasticitate ..................................................................................................4 I.2.3 Validarea experimentală a criteriilor de plasticitate ....................................................8 I.2.4 Comparație între criteriile de curgere..........................................................................9 I.2.5 Legi de ecruisare .......................................................................................................10 I.2.6 Legi de curgere..........................................................................................................11 I.2.7 Modele de plasticitate................................................................................................13
I.3 REZOLVAREA PROBLEMEI CONTACTULUI ÎN DOMENIUL ELASTIC .................................................................................... 16 I.3.1 Clasificarea contactelor .............................................................................................16 I.3.2 Condiţia de deformaţie la un contact elastic oarecare ...............................................18 I.3.3 Contacte echivalente..................................................................................................20 I.3.4 Condiții limită pe frontiera semispaţiului elastic.......................................................21 I.3.5 Clasificarea metodelor de rezolvare a problemei contactului elastic normal ............22 I.3.6 Metode directe de rezolvare a problemei contactului elastic normal ........................22 I.3.7 Metode inverse de rezolvare a problemei contactului elastic normal .......................26 I.3.8 Metode semi-inverse de rezolvare a problemei contactului elastic normal...............28
I.4 METODE DE REZOLVARE A PROBLEMEI CONTACTULUI ÎN DOMENIUL ELASTO-PLASTIC.................................................................... 33 I.4.1 Metode clasice în mecanica contactului elasto-plastic ..............................................33 I.4.2 Metode moderne în mecanica contactului elasto-plastic...........................................37 I.4.3 Rezolvarea problemei periodice a contactului în domeniul elasto-plastic ................43
I.5 CONCLUZII........................................................................................................... 46 II. CONTRIBUȚII PRIVIND FORMULAREA PROBLEMEI CONTACTULUI
NORMAL ÎN DOMENIUL ELASTO-PLASTIC ...................................................... 49 II.1 IPOTEZE................................................................................................................ 49 II.2 PRINCIPIUL RECIPROCITĂȚII (BETTI) ÎN PREZENȚA
DEFORMAȚIILOR NEELASTICE ...................................................................... 49 II.3 APLICAREA PRINCIPIULUI RECIPROCITĂȚII LA CONTACTUL
ÎN DOMENIUL ELASTO-PLASTIC.................................................................... 51 II.3.1 Calculul deplasărilor frontierei semispațiului ..........................................................52 II.3.2 Calculul tensiunilor din semispațiu..........................................................................53
II.4 FORMULAREA SUBPROBLEMEI ELASTICE ................................................. 55 II.5 FORMULAREA SUBPROBLEMEI REZIDUALE.............................................. 56
II.5.1 Evoluția zonei deformate plastic..............................................................................56 II.5.2 Formularea continuă a subproblemei reziduale .......................................................58
II.6 CONCLUZII........................................................................................................... 59
ii
III. REZOLVAREA SUBPROBLEMEI ELASTICE .......................................................61 III.1 FORMULAREA DISCRETĂ A PROBLEMEI CONTACTULUI
ELASTIC NORMAL.............................................................................................. 61 III.2 METODE NUMERICE NECONVENȚIONALE ÎN
MECANICA CONTACTULUI.............................................................................. 64 III.2.1 Metode de tip gradient ........................................................................................... 64 III.2.2 Metoda Multi Level Multi Summation (MLMS)................................................... 67 III.2.3 Metode spectrale .................................................................................................... 70 III.2.4 Metodele CCFT și DCFFT .................................................................................... 74 III.2.5 Metoda DCRFFT ................................................................................................... 78
III.3 ALGORITMI DE REZOLVARE A PROBLEMEI DISCRETE A CONTACTULUI ELASTIC NORMAL ................................................................79 III.3.1 Algoritm CG-DCFFT de rezolvare a problemei contactului elastic normal .......... 81 III.3.2 Algoritm de minimizare variațională ..................................................................... 83
III.4 VALIDAREA PROGRAMULUI PRIN REZULTATE ANALITICE .................. 86 III.4.1 Validarea pe contacte concentrate.......................................................................... 87 III.4.2 Validarea pe contacte conforme............................................................................. 90
III.5 VALIDAREA PROGRAMULUI PRIN MĂSURĂTORI EXPERIMENTALE................................................................................................91 III.5.1 Metode experimentale în mecanica contactului elastic.......................................... 91 III.5.2 Profilometria cu laser ............................................................................................. 92 III.5.3 Validarea programului numeric prin date experimentale....................................... 95
III.6 CONCLUZII ........................................................................................................... 95 IV. CONTRIBUȚII LA REZOLVAREA SUBPROBLEMEI ELASTICE ....................99
IV.1 CONTRIBUȚII LA AMELIORAREA DISTRIBUȚIEI DE PRESIUNE LA CONTACTUL ELASTIC ÎNCĂRCAT NORMAL ............................................... 99 IV.1.1 Analiza soluțiilor existente pentru ameliorarea distribuției
de presiune pe aria de contact................................................................................ 99 IV.1.2 Formularea și rezolvarea problemei inverse
a contactului elastic încărcat normal ................................................................... 102 IV.1.3 Uniformizarea presiunii la contactele între corpuri mărginite de
suprafețe exprimate prin polinoame de grad superior ......................................... 105 IV.2 CONTRIBUȚII LA DETERMINAREA DISTRIBUȚIEI DE PRESIUNE
CARE INDUCE UN CÂMP DE DEPLASĂRI CUNOSCUT............................. 111 IV.2.1 Calculul distribuției de presiune prin deconvoluție ............................................. 111 IV.2.2 Rezolvarea problemei contactului elastic normal
pentru o apropiere normală impusă ..................................................................... 114 IV.3 CONTRIBUȚII LA REZOLVAREA PROBLEMEI CONTACTULUI
ELASTIC ÎNCĂRCAT EXCENTRIC ................................................................. 115 IV.3.1 Rezolvarea problemei contactului elastic încărcat excentric prin
adăugarea unui nivel iterativ suplimentar............................................................ 115 IV.3.2 Validarea algoritmului ......................................................................................... 118 IV.3.3 Rezolvarea problemei contactului elastic încărcat
excentric printr-un algoritm pe un singur nivel iterativ....................................... 120 IV.3.4 Validarea algoritmului ......................................................................................... 125 IV.3.5 Eficiența computațională a algoritmilor .............................................................. 126 IV.3.6 Efectul excentricității asupra distribuției de presiune.......................................... 127
IV.4 CALCULUL STĂRII DE TENSIUNI LA CONTACTUL ELASTIC ÎNCĂRCAT NORMAL ȘI TANGENȚIAL......................................................... 132 IV.4.1 Metoda potențialelor ............................................................................................ 132 IV.4.2 Metoda DCFFT.................................................................................................... 133 IV.4.3 Efectul excentricității asupra stării de tensiuni .................................................... 136
iii
IV.5 CONTRIBUȚII LA REZOLVAREA PROBLEMEI STRATULUI ELASTIC ÎNCĂRCAT SIMETRIC......................................................................138 IV.5.1 Formularea și rezolvarea problemei lui Boussinesq pentru stratul elastic............138 IV.5.2 Formularea continuă a problemei stratului elastic încărcat simetric ....................140 IV.5.3 Formulare discretă și rezolvare numerică.............................................................141 IV.5.4 Validarea algoritmului..........................................................................................142 IV.5.5 Simulări numerice ................................................................................................142 IV.5.6 Starea de tensiuni indusă în stratul elastic ............................................................145
IV.6 CONCLUZII..........................................................................................................151 V. REZOLVAREA SUBPROBLEMEI REZIDUALE. CONTRIBUȚII .....................154
V.1 FORMULAREA DISCRETĂ A SUBPROBLEMEI REZIDUALE ....................154 V.1.1 Model de plasticitate în formulare discretă............................................................154 V.1.2 Discretizarea zonei deformată plastic ....................................................................155
V.2 CALCULUL COMPONENTEI REZIDUALE A DEPLASĂRII.........................156 V.3 CONTRIBUȚII LA CALCULUL TENSIUNILOR REZIDUALE ......................158
V.3.1 Introducere .............................................................................................................158 V.3.2 Descompunerea subproblemei tensiunilor reziduale .............................................159 V.3.3 Contribuții la calculul tensiunilor reziduale induse în spațiul elastic
de o distribuție arbitrară de deformații plastice .....................................................160 V.3.4 Contribuții la calculul corecției aferente limitei semispațiului elastic ...................168 V.3.5 Validarea algoritmului ...........................................................................................172
V.4 ALGORITM UNIVERSAL DE INTEGRARE A ECUAȚIILOR PLASTICITĂȚII ..........................................................................180
V.5 CONCLUZII..........................................................................................................183 VI. REZOLVAREA PROBLEMEI CONTACTULUI ÎN DOMENIUL
ELASTO-PLASTIC. CONTRIBUȚII .......................................................................186 VI.1 CONTRIBUȚII LA DEZVOLTAREA UNUI MODEL SIMPLIFICAT
DE CALCUL AL DISTRIBUȚIEI DE PRESIUNE PENTRU CONTACTELE ÎN DOMENIUL ELASTIC – PERFECT PLASTIC..................186
VI.2 REZOLVAREA PROBLEMEI CONTACTULUI ÎN DOMENIUL ELASTO-PLASTIC........................................................................189
VI.3 CONTRIBUȚII LA REZOLVAREA PROBLEMEI CONTACTULUI ÎN DOMENIUL ELASTO-PLASTIC...................................................................195 VI.3.1 Algoritm îmbunătățit de rezolvare a problemei contactului în
domeniul elasto-plastic.........................................................................................195 VI.3.2 Simulări numerice proprii. Validarea algoritmului .............................................197 VI.3.3 Validarea algoritmului prin rezultate experimentale ............................................207
VI.4 CONCLUZII..........................................................................................................210 VII. CONCLUZII FINALE, CONTRIBUȚII ȘI DIRECȚII
DE CERCETARE ULTERIOARĂ ............................................................................212 VII.1 CONCLUZII FINALE .........................................................................................212 VII.2 CONTRIBUȚII.....................................................................................................220 VII.3 DIRECȚII DE CERCETARE ULTERIOARĂ ....................................................224
BIBLIOGRAFIE ...................................................................................................................225
iv
ANEXE................................................................................................................................... 238 ANEXA 1. Evoluția deformației plastice cumulate ..................................................... 238 ANEXA 2. Evoluția tensiunii reziduale echivalente .................................................... 239 ANEXA 3. Evoluția tensiunii echivalente induse de presiunea de contact .................. 240 ANEXA 4. Evoluția tensiunii echivalente totale ......................................................... 241 ANEXA 5. Componentele tensorului tensiune reziduală ............................................. 242
v
INTRODUCERE
Fiind o disciplină profund teoretică în esență, Mecanica Contactului s-a dezvoltat prin modelări analitice de mare complexitate matematică. Lipsa soluțiilor analitice ale ecuațiilor care se stabilesc a dus la dezvoltarea abordărilor de tip numeric. Modelul problemei contactului în domeniul elasto-plastic a fost formulat integrând ipoteze și rezultate din teoria elasticității liniare și din cea a plasticității, rezolvarea acestuia fiind primordială în evaluarea capacității portante a contactelor inginerești. Lucrarea de față își propune să evidențieze stadiul actual al dezvoltării metodelor de rezolvare corespunzătoare acestei clase de probleme și să aducă contribuții noi, în sensul ameliorării eficienței și preciziei algoritmilor existenți. Teza este structurată pe șapte capitole, cinci anexe și bibliografie. Primul capitol prezintă sinteze ample privind ipotezele și ecuațiile teoriei elasticității liniare, conceptele și modelările din teoria plasticității, criteriile de plasticitate, clasificarea contactelor, metodele de rezolvare a problemei contactului în domeniul elastic, precum și metodele numerice clasice și moderne utilizate în mecanica contactului elastic și elasto-plastic. Structurarea algoritmilor pe trei niveluri iterative și utilizarea unor metode spectrale bidimensionale în rezolvarea unei probleme intrinsec tridimensionale limitează considerabil rezoluția sau numărul de incremenți de sarcină care pot fi impuse, degajându-se necesitatea și oportunitatea implementării unor modele de calcul îmbunătățite, mai bine adaptate abordării numerice. Capitolul al doilea prezintă contribuțiile autorului tezei la formularea completă a problemei contactului normal în domeniul elasto-plastic. Principiul reciprocității al lui Betti, ce exprimă o proprietate intrinsecă a ecuațiilor elasticității liniare, este utilizat în exprimarea deplasărilor normale ale frontierei, respectiv a stării de tensiuni din semispațiu, în prezența deformațiilor plastice. Ecuațiile obținute sugerează partiția problemei contactului elasto-plastic într-o subproblemă elastică și una reziduală, care nu pot fi însă rezolvate independent. Formularea și rezolvarea problemei discrete a contactului elastic normal, care se suprapune peste subproblema elastică din formularea problemei contactului în domeniul elasto-plastic, fac obiectul capitolului al treilea. Sunt prezentate sinteze proprii privind metodele de rezolvare a problemei contactului elastic normal bazate pe abordarea prin coeficienți de influență, precum și metodele numerice neconvenționale utilizate în teoria contactului. Un program numeric dezvoltat prin implementarea algoritmului CG-DCFFT este validat prin comparație cu soluțiile analitice existente pentru câteva tipuri de contacte concentrate sau conforme, cât și cu rezultate experimentale obținute prin profilometrie cu laser. Capitolul al patrulea prezintă contribuțiile autorului tezei la generalizarea modelului problemei contactului normal în domeniul elastic. Formularea problemei inverse a contactului elastic normal urmărește determinarea geometriei poansonului care induce o distribuție de presiune ameliorată, reprezentativă pentru tipul de contact considerat. Problema contactului elastic normal cu condiții limită în deplasări este rezolvată prin deconvoluție, respectiv prin modificarea algoritmului problemei cu condiții limită în tracțiuni. Problema contactului conform încărcat excentric este soluționată prin două metode: prin impunerea unui nivel iterativ suplimentar de ajustare a unghiurilor de
vi
rotație ale planului comun de contact, respectiv printr-un algoritm pe un singur nivel iterativ. Problema stratului elastic încărcat simetric cu poansoane identice, asimilabile unor semispații elastice, este rezolvată, în conformitate cu principiul suprapunerii efectelor, pornind de la soluția analitică a problemei lui Boussinesq pentru stratul elastic încărcat simetric, avansată de Diaconescu și Glovnea, [Dia08]. Rezolvarea numerică a ecuațiilor ce compun modelul subproblemei reziduale constituie obiectul capitolului al cincilea. Exprimarea contribuției zonei deformate plastic la câmpul de deplasări normale ale frontierei se face aplicând un algoritm DCFFT bidimensional în straturi de cotă constantă. Problema stării de tensiuni induse în semispațiu de un paralelipiped dreptunghic de deformații neelastice uniforme este descompusă, după metoda indicată de Chiu, [Chi78], în două subprobleme, ale căror soluții individuale sunt mai ușor de obținut. Tensiunile induse în spațiul infinit de un paralelipiped dreptunghic de deformații plastice uniforme se exprimă sub forma unui produs de convoluție tridimensională, respectiv a unuia de convoluție bidimensională și corelație unidimensională, pentru calculul cărora autorul tezei implementează algoritmi spectrali tridimensionali. Efortul de calcul este redus astfel de la
23 1 2 1 2( log )O N N N N N , în cazul clasic, la 1 2 3 1 2 3( log )O N N N N N N . Pentru calculul
corecției aferente frontierei semispațiului, se propune o metodă simplificată, adaptată abordării numerice, prin care efortul de calcul este redus de la 2
3 1 2 1 2( log )O N N N N N la
3 1 2 1 2( log )O N N N N N . Un avantaj suplimentar decurge din faptul că metoda nou propusă nu necesită calculul unor coeficienți de influență adiționali pentru evaluarea acestei corecții. Capitolul al șaselea prezintă algoritmul de rezolvare a problemei discrete a contactului normal în domeniul elasto-plastic. Metoda este formulată pornind de la algoritmul pe trei niveluri iterative avansat de Jacq, [Jac01]. Un nivel extern este necesar pentru aplicarea incrementală a sarcinii. Nivelul intermediar ajustează, în cadrul subproblemei elastice, perechea presiune – deplasare reziduală. Nivelul interior corespunde subproblemei reziduale, exprimând deplasările și tensiunile reziduale induse de zona deformată plastic. Metoda clasică, bazată pe legea Prandtl-Reuss, presupune ajustarea incrementului deformațiilor plastice prin modelul de plasticitate. Autorul tezei determină acest increment cu algoritmul propus de Fotiu și Nemat-Nasser, [Fot96]. Prin noua abordare, calculul tensiunilor reziduale induse de zona deformată plastic, consumator de resurse de calcul importante, este mutat pe un nivel iterativ superior. Predicțiile programului numeric avansat concordă bine cu rezultatele obținute de alți autori, fie numeric, prin programe alternative sau prin metoda elementului finit, fie experimental. Simulările numerice sugerează că deplasările reziduale acționează în sensul creșterii conformității contactului, iar tensiunile reziduale reduc intensitățile tensiunilor induse de presiunea de contact, uniformizând câmpul tensiunilor totale. Ultimul capitol, al șaptelea, prezintă concluziile finale ale tezei, subliniază contribuțiile aduse în lucrare și prefigurează noi direcții de cercetare în domeniu. Anexele prezintă distribuțiile într-un plan radial ale unor mărimi scalare sau tensoriale specifice problemei contactului în domeniul elasto-plastic. Bibliografia cuprinde un număr mare de referințe clasice și moderne, acoperind întreaga problematică a tezei.
Contribuții privind rezolvarea problemei contactului normal în domeniul elasto-plastic 1
I. STADIUL ACTUAL ȘI METODE DE REZOLVARE A PROBLEMELOR DE CONTACT ELASTIC ȘI ELASTO-PLASTIC
Primul capitol prezintă câteva elemente de teoria elasticității liniare și de teoria plasticității, teoria clasică a contactului elastic și metodologia de abordare a problemelor de contact în domeniul elastic și elasto-plastic. Subcapitol unu debutează cu prezentarea ipotezelor teoriei elasticității liniare și a ecuațiilor fundamentale ale elasticității liniare (ecuațiile de echilibru la rotație și la translație ale volumului elementar, relaţiile diferenţiale între deplasări şi deformaţii specifice și legea generalizată a lui Hooke), care se sintetizează în ecuația fundamentală a elastostaticii (Lamé). Subcapitolul al doilea este centrat pe prezentarea conceptelor și a tehnicilor utilizate curent în teoria plasticității. Plasticitatea este privită ca un model particular de reprezentare a comportării neliniare a materialelor, iar caracterul ireversibil al deformațiilor plastice implică necesitatea adoptării unei descrieri incrementale a legilor de curgere. Inițierea curgerii plastice este prezisă de criteriile de plasticitate, care exprimă o relație matematică între o combinație de tensiuni multiaxiale și o valoare limită dependentă de material. Un alt concept important al plasticității îl reprezintă legea de ecruisare (izotropă sau cinematică), care exprimă evoluția în spațiul tensiunilor a domeniului elastic inițial. Pentru descrierea comportării elasto-plastice a materialelor, este necesară, de asemenea, o lege de curgere, care exprimă evoluția componentelor tensorului deformațiilor plastice în funcție de tensorul tensiunilor. Subcapitolul se încheie prin prezentarea celor mai utilizate modele de plasticitate: legea Prandtl-Reuss, legea Prager, modelul Lemaître-Chaboche sau cel al plasticității perfecte. Rezolvarea problemei contactului în domeniul elastic constituie obiectul subcapitolului al treilea. Mai întâi, se realizează o sinteză a diverselor clasificări ale contactelor întâlnite în literatura de specialitate. Sunt evidențiate, în continuare, condiția de deformație la un contact oarecare, care descrie condițiile geometrice ce conduc la scrierea ecuației de interferență, și teoria contactelor echivalente, care sugerează tratarea oricărui contact elastic printr-unul echivalent de tipul poanson rigid – semispațiu elastic. După prezentarea tipurilor de condiții limită pe frontiera semispațiului elastic, se realizează clasificarea metodelor de rezolvare a problemei contactului elastic normal. Subcapitolul al patrulea prezintă stadiul actual al rezolvării problemei contactului în domeniul elasto-plastic. Deoarece dependența tensiune-deformație în domeniul elasto-plastic are un caracter neliniar, soluționarea analitică a modelului este imposibilă la momentul analizei, fiind preferate metodele numerice. Dintre acestea, cele mai utilizate sunt metoda elementelor finite și metodele semi-analitice. Subcapitolul trece în revistă cele mai importante contribuții în domeniu, evidențiind, în același timp, dezavantajele și ipotezele simplificatoare utilizate în fiecare caz. Analiza prin elemente finite nu prezintă dificultăți conceptuale, dar necesitatea discretizării întregului corp supus analizei o face impracticabilă pe calculatoare personale. Pe de altă parte, metodele semi-analitice, care presupun doar digitizarea unei regiuni restrânse incluzând aria de contact și zona deformată plastic, se prezintă ca o alternativă viabilă. Primul model complet de calcul al problemei tridimensionale a contactului elasto-plastic, care
2 Contribuții privind rezolvarea problemei contactului normal în domeniul elasto-plastic presupune determinarea explicită a zonei deformate plastic și a tensiunilor reziduale, fără a impune a anumită lege de variație a presiunii de contact, aparține lui Jacq, [Jac01]. Implementarea metodelor moderne în rezolvarea contactului elastic normal și a metodelor spectrale bidimensionale în calculul convoluțiilor care apar constituie atuuri importante. Structurarea algoritmului pe trei niveluri iterative și poziționarea calculelor intens consumatoare de resurse pe nivelul interior limitează considerabil rezoluția care poate fi impusă sau numărul de incremenți de sarcină. În plus, viteza de convergență a buclelor interioare este condiționată de mărimea acestor incremenți. Metoda este ulterior rafinată de Wang și Keer, [Wan05], prin accelerarea convergenței buclelor interioare, de Liu și Wang, [Liu05], prin implementarea unui nou model de calcul al tensiunilor reziduale, respectiv de Nélias, Boucly și Brunet, [Nél06], prin utilizarea unui algoritm îmbunătățit de calcul al incrementului deformațiilor plastice. Chiar cu aceste contribuții, utilizarea unor algoritmi spectrali bidimensionali reduce considerabil eficiența metodei, degajându-se necesitatea și oportunitatea implementării unor modele de calcul noi, adaptate naturii intrinsec tridimensionale a problemei investigate.
II. CONTRIBUȚII PRIVIND FORMULAREA PROBLEMEI CONTACTULUI NORMAL ÎN DOMENIUL ELASTO-PLASTIC
II.1 IPOTEZE
Formularea problemei contactului elasto-plastic normal corespunde unei probleme elastice cu deformații inițiale. Ipotezele modelului vizează partea elastică a comportării materialului. Dacă se consideră un solid care ocupă un volum Ω mărginit de o suprafață Γ , în care există deformațiile inițiale 0ε , trebuie îndeplinite simultan următoarele relații:
a. ecuațiile lui Cauchy în prezența forțelor masice if :
, 0ij j ifσ + = , în Ω ; (II.1)
b. relațiile lui Cauchy pentru deformații:
( ), ,
1
2ij i j j iu uε = + , în Ω ; (II.2)
c. legea lui Hooke în prezența deformațiilor inițiale:
( )0ij ijk k kMσ ε ε= − , în Ω ; (II.3)
d. condițiile la limită:
i iu u= , pe uΓ ; i ij j ip n pσ= = , pe pΓ , cu u pΓ + Γ = Γ . (II.4)
Contribuții privind rezolvarea problemei contactului normal în domeniul elasto-plastic 3
II.3 APLICAREA PRINCIPIULUI RECIPROCITĂȚII LA CONTACTUL ÎN DOMENIUL ELASTO-PLASTIC
II.3.1 Calculul deplasărilor frontierei semispațiului
Aplicând principiul reciprocității al lui Betti rezultă expresia deplasărilor frontierei semispațiului după direcția 3x
în funcție de presiunea de contact și de deformațiile
plastice din semispațiu. Ea se exprimă ca suma a doi termeni distincți. Primul este o integrală de suprafață, care exprimă contribuția forțelor superficiale (presiuni). Ea corespunde expresiei deplasărilor induse în cazul unui material pur elastic ( 0p =ε ) și este echivalentă formulării din problema contactului elastic normal. Acest termen va fi numit în continuare partea elastică a soluției. Rezultă deci următoarea partiție a câmpului de deplasări ale frontierei semispațiului încărcat superficial și în care există deformații plastice:
3 3 3 3( ) ( )pr r p= +u u p u ε . (II.5)
II.3.2 Calculul tensiunilor din semispațiu
Expresia tensiunilor dintr-un corp încărcat pe frontieră și având deformații plastice în volum, se exprimă prin contribuția a doi termeni: primul este o integrală de suprafață care cuantifică efectul distribuției de presiune aplicată pe un subdomeniu al suprafeței limitrofe, iar al doilea este o integrală de volum care exprimă contribuția deformațiilor plastice:
3( ) ( )pr r p= +σ σ p σ ε . (II.6)
Ansamblul relațiilor (II.5) și (II.6) sugerează diviziunea problemei contactului elasto-plastic într-o parte elastică și una reziduală. Cele două subprobleme nu sunt independente. Rezolvarea părții elastice necesită cunoaşterea deplasărilor reziduale ale frontierei, ru , în timp ce rezolvarea părții reziduale cere determinarea tensiunilor, prσ , induse în semispațiu de distribuția de presiune de pe aria de contact.
II.4 FORMULAREA SUBPROBLEMEI ELASTICE Modelul continuu al unei probleme de contact elastic normal este alcătuit din egalitățile și inegalitățile descrise în continuare. a. Condiția de echilibru static. Integrala presiunii pe aria de contact CΓ trebuie să compenseze sarcina aplicată normal W :
1 2 1 2( , )C
W p x x dx dxΓ
= . (II.7)
b. Relația interstițiului (separației) dintre corpurile în contact, h , după deformare:
4 Contribuții privind rezolvarea problemei contactului normal în domeniul elasto-plastic
1 2 1 2 3 1 2( , ) ( , ) ( , ) (0,0)h x x hi x x u x x ω= + − . (II.8)
c. Condiția de nepenetrare. Pornind de la relația condiției generale de deformație, rezultă că expresia interstițiului 1 2( , )h x x trebuie să satisfacă relațiile:
1 2 1 2
1 2 1 2
( , ) 0, ( , ) ;
( , ) 0, ( , ) .C
C
h x x x x
h x x x x
= ∈Γ > ∉Γ
(II.9)
d. Condiția de neadeziune. Aceasta stipulează că între suprafețele limitrofe ale corpurilor în contact nu există adeziune, prin urmare tracțiunile de suprafață nu pot fi decât de compresiune (presiuni de contact). Cazul forțelor superficiale de contact de tracțiune este exclus:
1 2 1 2
1 2 1 2
( , ) 0, ( , ) ;
( , ) 0, ( , ) .C
C
p x x x x
p x x x x
> ∈Γ = ∉Γ
(II.10)
Modelul este valabil atât pentru cazul pur elastic, când câmpul deplasărilor 3u din relația (II.8) include numai contribuția deplasările induse de presiunea de contact,
3 3 ( )pr=u u p , cât și pentru cazul elasto-plastic, când trebuie adăugată și contribuția
deformațiilor plastice: 3 3 3( ) ( )pr r p= +u u p u ε . Determinarea câmpului deplasărilor reziduale necesită cunoașterea zonei deformate plastic, fapt care cade în sarcina problemei reziduale.
II.5 FORMULAREA SUBPROBLEMEI REZIDUALE II.5.2 Formularea continuă a subproblemei reziduale
Formularea problemei reziduale se sprijină pe relațiile următoare: a. modelul de plasticitate ales, care permite calculul incrementului deformației plastice:
( , , )p p pr r pr rd d d d starea de ecruisare= + +ε ε σ σ σ σ ; (II.11)
b. formula de calcul a deplasărilor reziduale ale frontierei, în funcție de distribuția de deformații plastice; punând în evidență coordonatele, aceasta se scrie:
3 1 2 1 2 3 3 1 1 2 2 3( , ) 2 ( , , ) ( , , )p
r pij iju x x x x x x x x x x dμ ε ε ∗
Ω
′ ′ ′ ′ ′ ′= − − Ω ; (II.12)
unde 3 1 1 2 2 3( , , )ij x x x x xε ∗ ′ ′ ′− − reprezintă deformația elastică din semispațiu indusă în
punctul 1 2 3( , , )x x x′ ′ ′ de o forță concentrată unitară acționând după direcția 3x
în punctul
1 2( , ,0)x x ; c. formula de calcul a tensiunilor reziduale, în funcție de distribuția de deformații plastice:
Contribuții privind rezolvarea problemei contactului normal în domeniul elasto-plastic 5
1 2 3 1 2 3 1 1 2 2 3 3( , , ) 2 ( , , ) ( , , )p
r pk ij kiju x x x x x x x x x x x x dμ ε ε ∗∗
Ω
′ ′ ′ ′ ′ ′= − − − Ω ; (II.13)
, ,
1( )
2r r r pij ijk k k kM u uσ ε = + −
, (II.14)
unde 1 1 2 2 3 3( , , )kij x x x x x xε ∗∗ ′ ′ ′− − − reprezintă componenta ij a tensorului deformație indusă
în punctul 1 2 3( , , )x x x′ ′ ′ de o forță volumică unitară aplicată după direcția kx
în punctul
1 2 3( , , )x x x . După cum se observă, atât calculul componentei reziduale a deplasării normale a frontierei, cât și cel al tensiunilor reziduale, necesită cunoașterea distribuției de deformații plastice. Incrementul acestora poate fi exprimat din modelul de plasticitate (II.11), în ipoteza cunoașterii stării de tensiuni totale. Prin urmare, rezolvarea subproblemei reziduale necesită cunoașterea tensiunilor induse de presiune, prσ , al căror calcul este efectuat în cadrul subproblemei elastice.
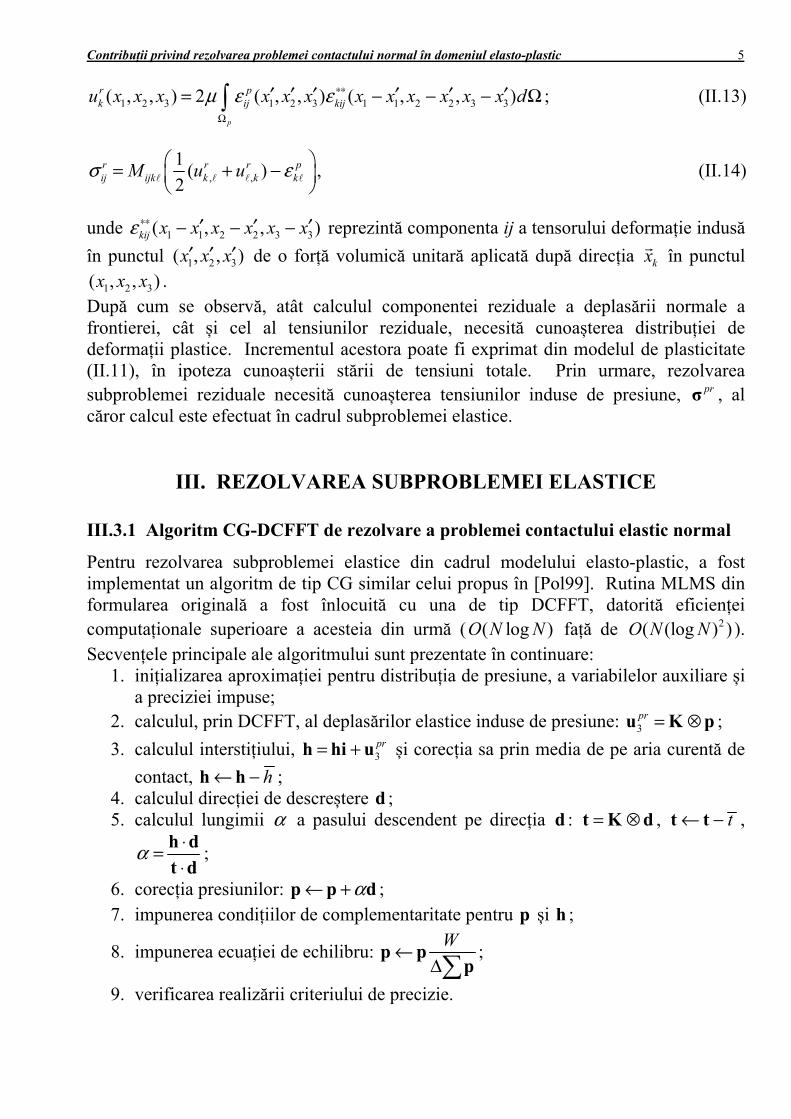
III. REZOLVAREA SUBPROBLEMEI ELASTICE III.3.1 Algoritm CG-DCFFT de rezolvare a problemei contactului elastic normal
Pentru rezolvarea subproblemei elastice din cadrul modelului elasto-plastic, a fost implementat un algoritm de tip CG similar celui propus în [Pol99]. Rutina MLMS din formularea originală a fost înlocuită cu una de tip DCFFT, datorită eficienței computaționale superioare a acesteia din urmă ( ( log )O N N față de 2( (log ) )O N N ). Secvențele principale ale algoritmului sunt prezentate în continuare:
1. inițializarea aproximației pentru distribuția de presiune, a variabilelor auxiliare și a preciziei impuse;
2. calculul, prin DCFFT, al deplasărilor elastice induse de presiune: 3pr = ⊗u K p ;
3. calculul interstițiului, 3pr= +h hi u și corecția sa prin media de pe aria curentă de
contact, h← −h h ; 4. calculul direcției de descreștere d ; 5. calculul lungimii α a pasului descendent pe direcția d : = ⊗t K d , t← −t t ,
α ⋅=⋅
h d
t d;
6. corecția presiunilor: α← +p p d ; 7. impunerea condițiilor de complementaritate pentru p și h ;
8. impunerea ecuației de echilibru: W←
Δp p
p;
9. verificarea realizării criteriului de precizie.
6 Contribuții privind rezolvarea problemei contactului normal în domeniul elasto-plastic
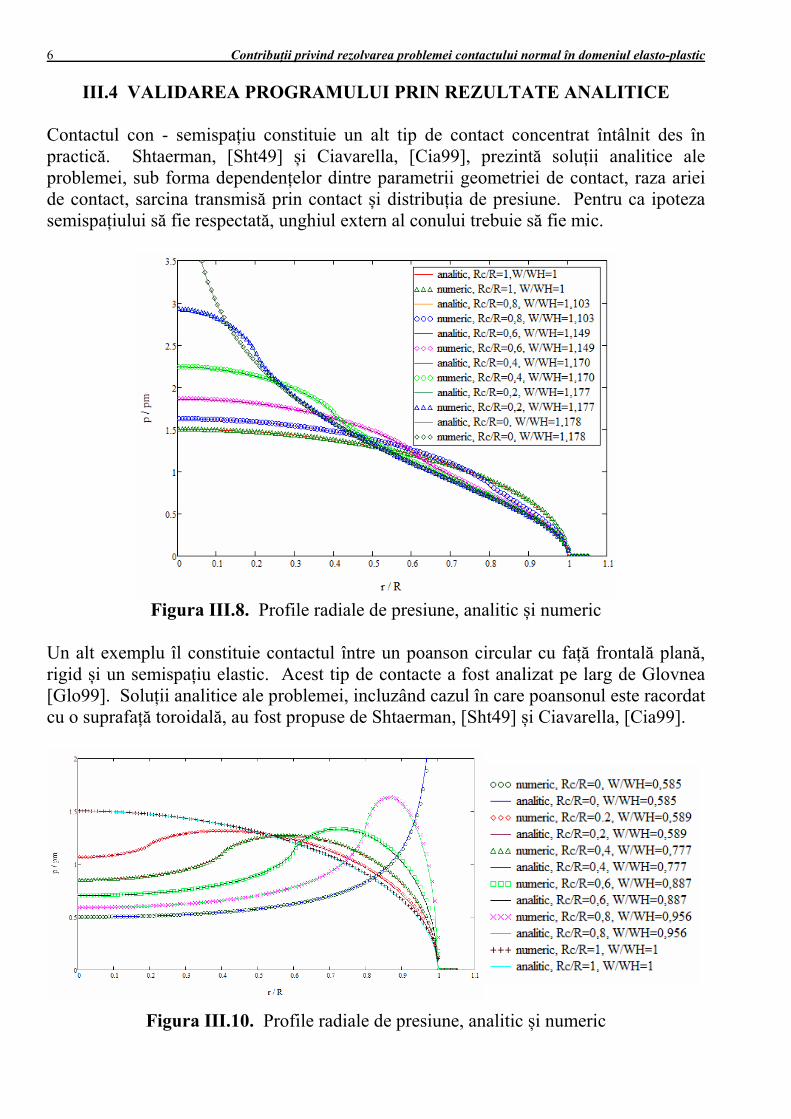
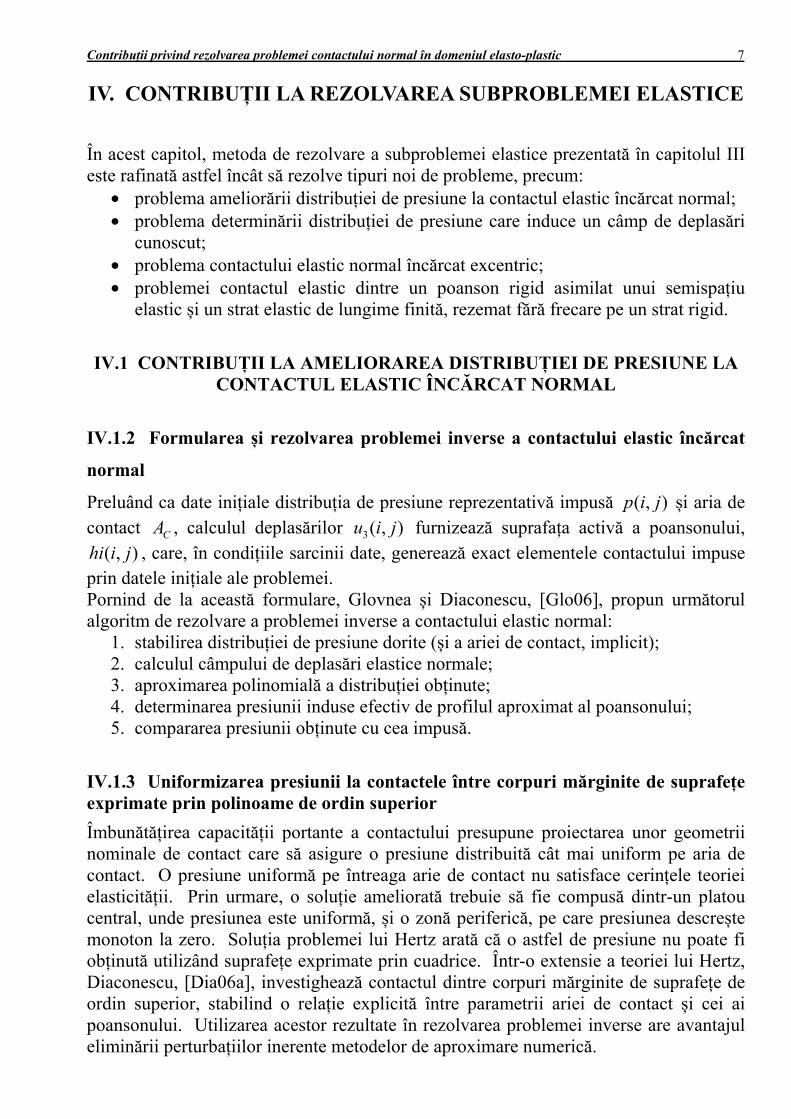
III.4 VALIDAREA PROGRAMULUI PRIN REZULTATE ANALITICE
Contactul con - semispațiu constituie un alt tip de contact concentrat întâlnit des în practică. Shtaerman, [Sht49] și Ciavarella, [Cia99], prezintă soluții analitice ale problemei, sub forma dependențelor dintre parametrii geometriei de contact, raza ariei de contact, sarcina transmisă prin contact și distribuția de presiune. Pentru ca ipoteza semispațiului să fie respectată, unghiul extern al conului trebuie să fie mic.
Figura III.8. Profile radiale de presiune, analitic și numeric
Un alt exemplu îl constituie contactul între un poanson circular cu față frontală plană, rigid și un semispațiu elastic. Acest tip de contacte a fost analizat pe larg de Glovnea [Glo99]. Soluții analitice ale problemei, incluzând cazul în care poansonul este racordat cu o suprafață toroidală, au fost propuse de Shtaerman, [Sht49] și Ciavarella, [Cia99].
Figura III.10. Profile radiale de presiune, analitic și numeric
Contribuții privind rezolvarea problemei contactului normal în domeniul elasto-plastic 7 IV. CONTRIBUȚII LA REZOLVAREA SUBPROBLEMEI ELASTICE
În acest capitol, metoda de rezolvare a subproblemei elastice prezentată în capitolul III este rafinată astfel încât să rezolve tipuri noi de probleme, precum:
• problema ameliorării distribuției de presiune la contactul elastic încărcat normal; • problema determinării distribuției de presiune care induce un câmp de deplasări
cunoscut; • problema contactului elastic normal încărcat excentric; • problemei contactul elastic dintre un poanson rigid asimilat unui semispațiu
elastic și un strat elastic de lungime finită, rezemat fără frecare pe un strat rigid.
IV.1 CONTRIBUȚII LA AMELIORAREA DISTRIBUȚIEI DE PRESIUNE LA CONTACTUL ELASTIC ÎNCĂRCAT NORMAL
IV.1.2 Formularea și rezolvarea problemei inverse a contactului elastic încărcat
normal
Preluând ca date inițiale distribuția de presiune reprezentativă impusă ( , )p i j și aria de contact CA , calculul deplasărilor 3( , )u i j furnizează suprafața activă a poansonului,
( , )hi i j , care, în condițiile sarcinii date, generează exact elementele contactului impuse prin datele inițiale ale problemei. Pornind de la această formulare, Glovnea și Diaconescu, [Glo06], propun următorul algoritm de rezolvare a problemei inverse a contactului elastic normal:
1. stabilirea distribuției de presiune dorite (și a ariei de contact, implicit); 2. calculul câmpului de deplasări elastice normale; 3. aproximarea polinomială a distribuției obținute; 4. determinarea presiunii induse efectiv de profilul aproximat al poansonului; 5. compararea presiunii obținute cu cea impusă.
IV.1.3 Uniformizarea presiunii la contactele între corpuri mărginite de suprafețe exprimate prin polinoame de ordin superior
Îmbunătățirea capacității portante a contactului presupune proiectarea unor geometrii nominale de contact care să asigure o presiune distribuită cât mai uniform pe aria de contact. O presiune uniformă pe întreaga arie de contact nu satisface cerințele teoriei elasticității. Prin urmare, o soluție ameliorată trebuie să fie compusă dintr-un platou central, unde presiunea este uniformă, și o zonă periferică, pe care presiunea descrește monoton la zero. Soluția problemei lui Hertz arată că o astfel de presiune nu poate fi obținută utilizând suprafețe exprimate prin cuadrice. Într-o extensie a teoriei lui Hertz, Diaconescu, [Dia06a], investighează contactul dintre corpuri mărginite de suprafețe de ordin superior, stabilind o relație explicită între parametrii ariei de contact și cei ai poansonului. Utilizarea acestor rezultate în rezolvarea problemei inverse are avantajul eliminării perturbațiilor inerente metodelor de aproximare numerică.
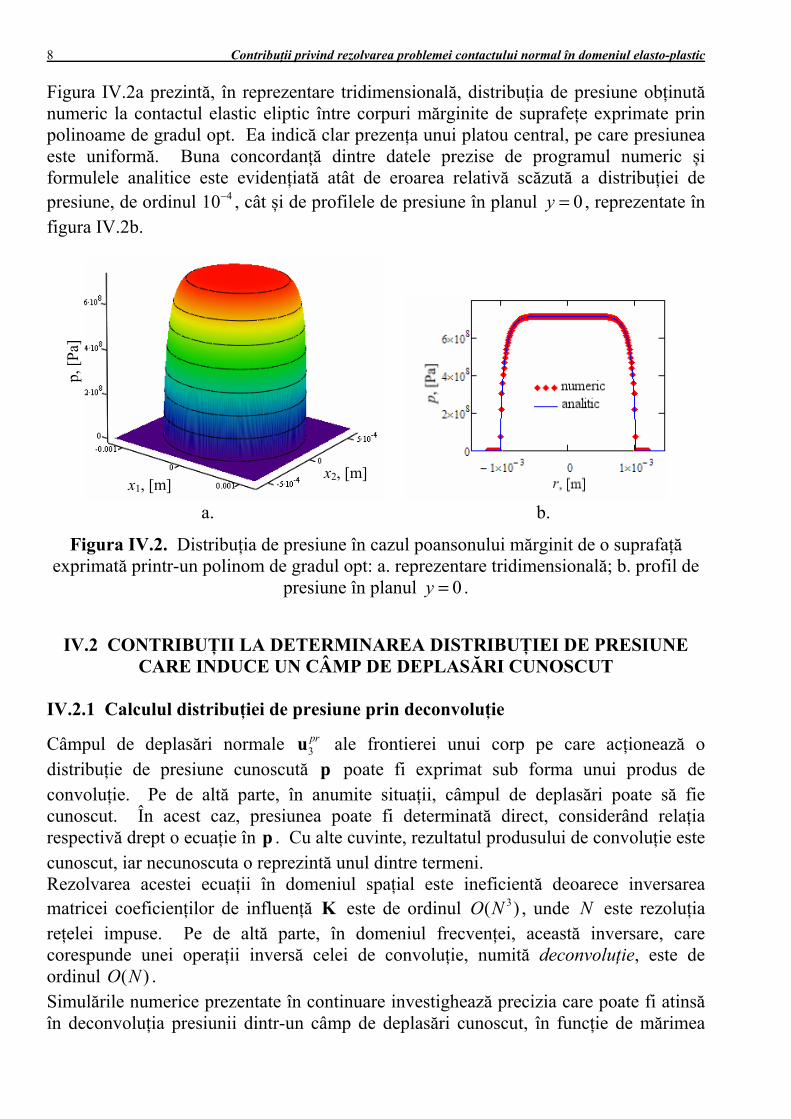
8 Contribuții privind rezolvarea problemei contactului normal în domeniul elasto-plastic Figura IV.2a prezintă, în reprezentare tridimensională, distribuția de presiune obținută numeric la contactul elastic eliptic între corpuri mărginite de suprafețe exprimate prin polinoame de gradul opt. Ea indică clar prezența unui platou central, pe care presiunea este uniformă. Buna concordanță dintre datele prezise de programul numeric și formulele analitice este evidențiată atât de eroarea relativă scăzută a distribuției de presiune, de ordinul 410− , cât și de profilele de presiune în planul 0y = , reprezentate în figura IV.2b.
a. b.
Figura IV.2. Distribuția de presiune în cazul poansonului mărginit de o suprafață exprimată printr-un polinom de gradul opt: a. reprezentare tridimensională; b. profil de
presiune în planul 0y = .
IV.2 CONTRIBUȚII LA DETERMINAREA DISTRIBUȚIEI DE PRESIUNE CARE INDUCE UN CÂMP DE DEPLASĂRI CUNOSCUT
IV.2.1 Calculul distribuției de presiune prin deconvoluție
Câmpul de deplasări normale 3pru ale frontierei unui corp pe care acționează o
distribuție de presiune cunoscută p poate fi exprimat sub forma unui produs de convoluție. Pe de altă parte, în anumite situații, câmpul de deplasări poate să fie cunoscut. În acest caz, presiunea poate fi determinată direct, considerând relația respectivă drept o ecuație în p . Cu alte cuvinte, rezultatul produsului de convoluție este cunoscut, iar necunoscuta o reprezintă unul dintre termeni. Rezolvarea acestei ecuații în domeniul spațial este ineficientă deoarece inversarea matricei coeficienților de influență K este de ordinul 3( )O N , unde N este rezoluția rețelei impuse. Pe de altă parte, în domeniul frecvenței, această inversare, care corespunde unei operații inversă celei de convoluție, numită deconvoluție, este de ordinul ( )O N . Simulările numerice prezentate în continuare investighează precizia care poate fi atinsă în deconvoluția presiunii dintr-un câmp de deplasări cunoscut, în funcție de mărimea
p, [
Pa]
x1, [m] x2, [m]
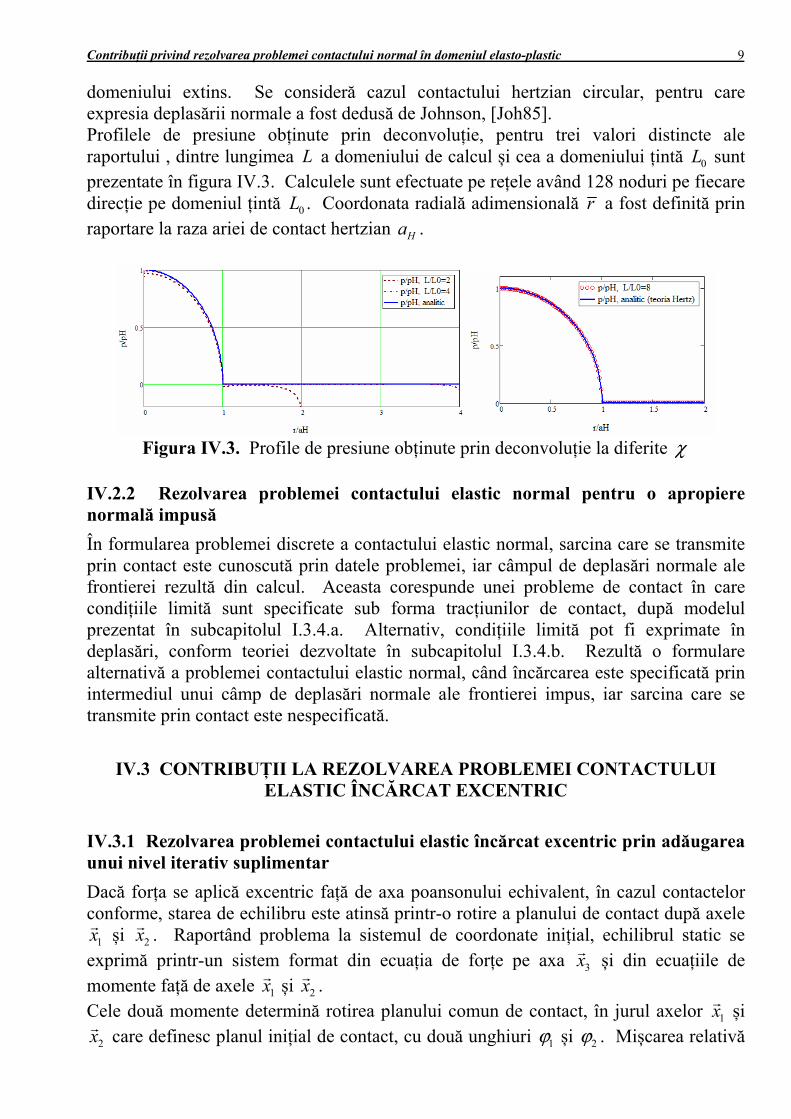
Contribuții privind rezolvarea problemei contactului normal în domeniul elasto-plastic 9 domeniului extins. Se consideră cazul contactului hertzian circular, pentru care expresia deplasării normale a fost dedusă de Johnson, [Joh85]. Profilele de presiune obținute prin deconvoluție, pentru trei valori distincte ale raportului , dintre lungimea L a domeniului de calcul și cea a domeniului țintă 0L sunt prezentate în figura IV.3. Calculele sunt efectuate pe rețele având 128 noduri pe fiecare direcție pe domeniul țintă 0L . Coordonata radială adimensională r a fost definită prin raportare la raza ariei de contact hertzian Ha .
Figura IV.3. Profile de presiune obținute prin deconvoluție la diferite χ
IV.2.2 Rezolvarea problemei contactului elastic normal pentru o apropiere normală impusă
În formularea problemei discrete a contactului elastic normal, sarcina care se transmite prin contact este cunoscută prin datele problemei, iar câmpul de deplasări normale ale frontierei rezultă din calcul. Aceasta corespunde unei probleme de contact în care condițiile limită sunt specificate sub forma tracțiunilor de contact, după modelul prezentat în subcapitolul I.3.4.a. Alternativ, condițiile limită pot fi exprimate în deplasări, conform teoriei dezvoltate în subcapitolul I.3.4.b. Rezultă o formulare alternativă a problemei contactului elastic normal, când încărcarea este specificată prin intermediul unui câmp de deplasări normale ale frontierei impus, iar sarcina care se transmite prin contact este nespecificată.
IV.3 CONTRIBUȚII LA REZOLVAREA PROBLEMEI CONTACTULUI ELASTIC ÎNCĂRCAT EXCENTRIC
IV.3.1 Rezolvarea problemei contactului elastic încărcat excentric prin adăugarea unui nivel iterativ suplimentar
Dacă forța se aplică excentric față de axa poansonului echivalent, în cazul contactelor conforme, starea de echilibru este atinsă printr-o rotire a planului de contact după axele
1x
și 2x
. Raportând problema la sistemul de coordonate inițial, echilibrul static se exprimă printr-un sistem format din ecuația de forțe pe axa 3x
și din ecuațiile de
momente față de axele 1x
și 2x
. Cele două momente determină rotirea planului comun de contact, în jurul axelor 1x
și
2x
care definesc planul inițial de contact, cu două unghiuri 1ϕ și 2ϕ . Mișcarea relativă

10 Contribuții privind rezolvarea problemei contactului normal în domeniul elasto-plastic de corp rigid dintre corpurile în contact este compusă din rotație și translație, spre deosebire de cazul încărcării centrice, când apare numai translația descrisă de apropierea normală ω . În consecință, ecuația suprafeței de separație se exprimă, în sistemul de coordonate utilizat inițial, după cum urmează:
3 1 1 2 2( , ) ( , ) ( , ) ( , ) tan( ) ( , ) tan( ), ( , ) Ph i j hi i j u i j x i j x i j i j Aω ϕ ϕ= + − + + ∈ . (IV.1)
Problema contactului elastic normal încărcat excentric se poate reduce la problema contactului normal încărcat centric cu o geometrie de contact modificată, funcție de unghiurile de înclinare ale planului comun de contact. Distribuția de presiune calculată cu aceste unghiuri trebuie să verifice ecuațiile de echilibru static referitoare la momentele axiale:
2 2( , )
1 1( , )
( , ) ( );
( , ) ( ).C
C
i j A
i j A
Wx p i j x i
Wx p i j x j
∈
∈
′ = Δ ′ = Δ
(IV.2)
Prin urmare, trebuie rezolvat în 1ϕ și 2ϕ sistemul (IV.2), în care dependența
1 2( ) ( , )ϕ ϕ=p φ p este dată de modelul problemei contactului normal încărcat centric cu o geometrie de contact modificată. Cum la momentul analizei funcția ( )p φ nu poate fi exprimată explicit, este necesară implementarea unui algoritm de tip Newton-Raphson.
IV.3.2 Validarea algoritmului
Pentru validarea modelului, predicțiile programului numeric au fost comparate cu formulările analitice avansate de Lurie, [Lur64]. Considerând cazul unui poanson cilindric, de rază 5R mm= , apăsat frontal excentric pe un semispațiu elastic, cu o forță
2W kN= , distribuțiile de presiune într-un plan radial, care conține dreapta suport a forței, pentru două valori ale excentricității adimensionale e e R= , sunt reprezentate în figura IV.5.
Figura IV.5. Validarea algoritmului în
cazul încărcării excentrice Figura IV.11. Deschiderea contactului în
zonele limitrofe
1,[m]x 2 ,[m]x
p, [
Pa]
Contribuții privind rezolvarea problemei contactului normal în domeniul elasto-plastic 11 IV.3.3 Rezolvarea problemei contactului elastic încărcat excentric printr-un algoritm pe un singur nivel iterativ
Algoritmul Polonsky a fost modificat de autorul tezei astfel încât nu doar ecuația de forțe, ci și ecuațiile de momente (de înclinare), pe aria de contact, să fie impuse pe parcursul iterațiilor pentru ajustarea presiunilor nodale. Spre deosebire de metoda propusă anterior, unghiurile de înclinare ale planului comun de contact sunt ele însele iterate pe parcursul buclei pentru calculul presiunilor nodale, eliminându-se necesitatea unui nivel iterativ suplimentar.
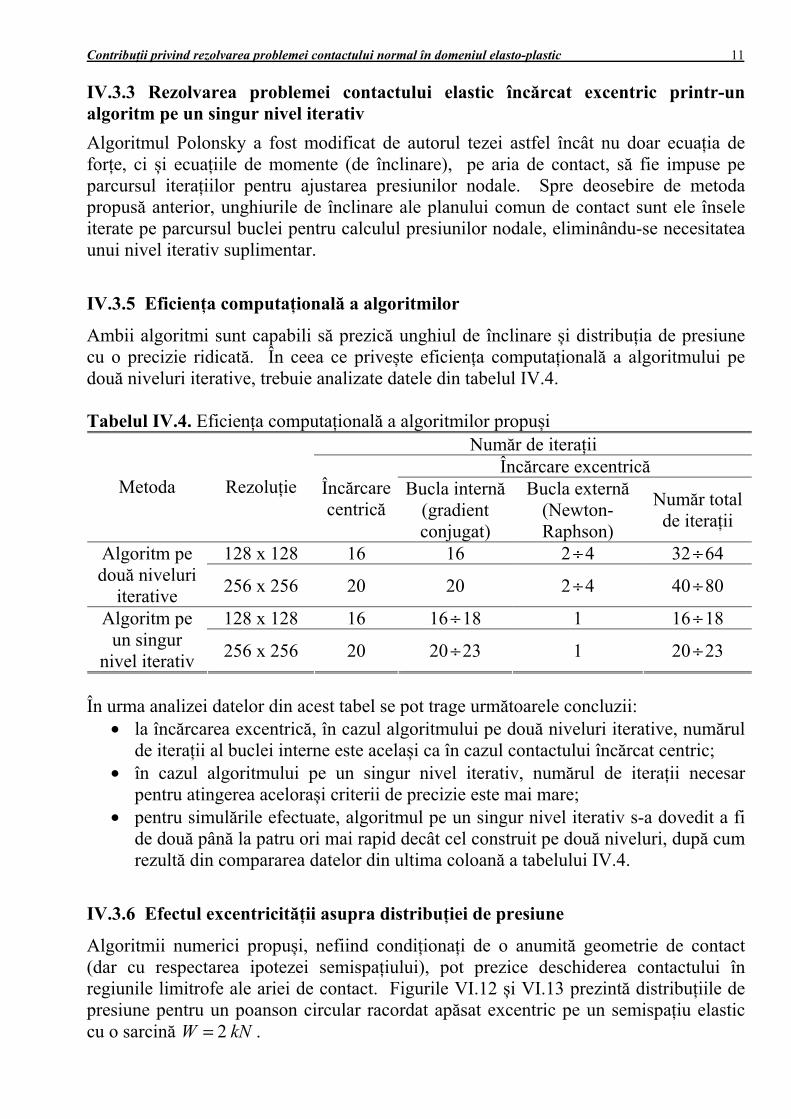
IV.3.5 Eficiența computațională a algoritmilor
Ambii algoritmi sunt capabili să prezică unghiul de înclinare și distribuția de presiune cu o precizie ridicată. În ceea ce privește eficiența computațională a algoritmului pe două niveluri iterative, trebuie analizate datele din tabelul IV.4. Tabelul IV.4. Eficiența computațională a algoritmilor propuși
Număr de iterații Încărcare excentrică
Metoda Rezoluție Încărcare centrică
Bucla internă (gradient conjugat)
Bucla externă (Newton-Raphson)
Număr total de iterații
128 x 128 16 16 2 ÷4 32 ÷64 Algoritm pe două niveluri
iterative 256 x 256 20 20 2 ÷4 40 ÷80
128 x 128 16 16 ÷18 1 16 ÷18 Algoritm pe un singur
nivel iterativ 256 x 256 20 20 ÷23 1 20 ÷23
În urma analizei datelor din acest tabel se pot trage următoarele concluzii:
• la încărcarea excentrică, în cazul algoritmului pe două niveluri iterative, numărul de iterații al buclei interne este același ca în cazul contactului încărcat centric;
• în cazul algoritmului pe un singur nivel iterativ, numărul de iterații necesar pentru atingerea acelorași criterii de precizie este mai mare;
• pentru simulările efectuate, algoritmul pe un singur nivel iterativ s-a dovedit a fi de două până la patru ori mai rapid decât cel construit pe două niveluri, după cum rezultă din compararea datelor din ultima coloană a tabelului IV.4.
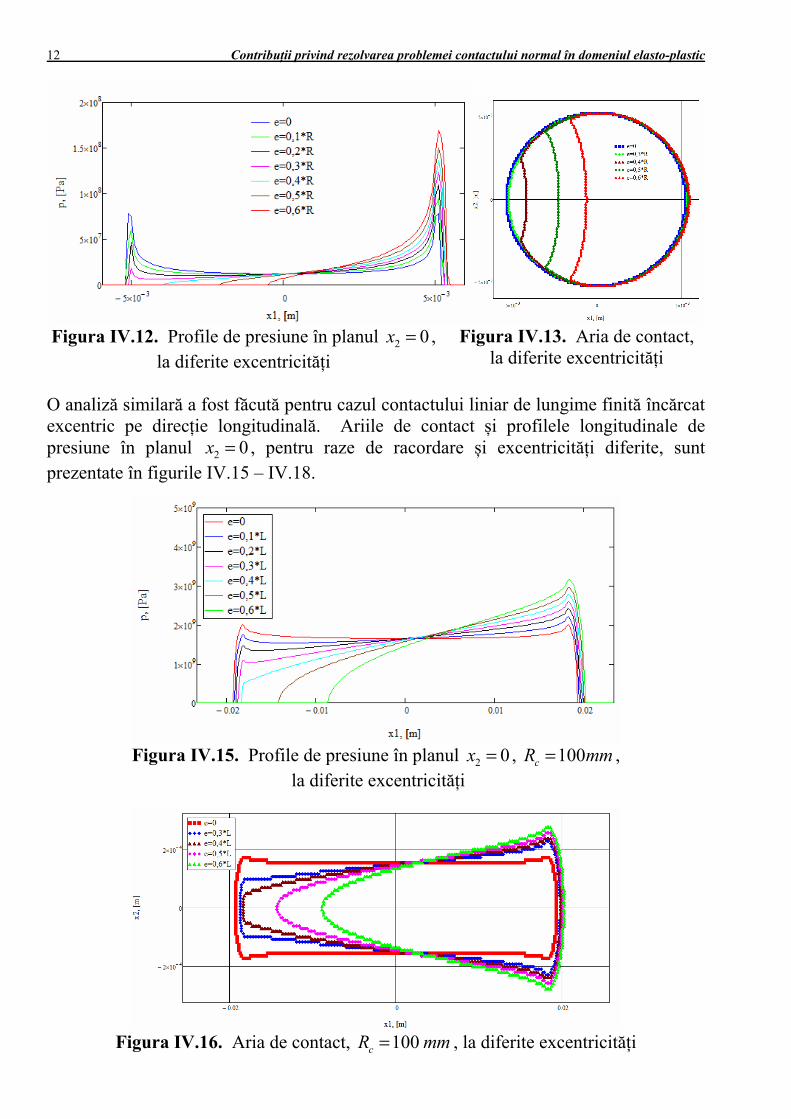
IV.3.6 Efectul excentricității asupra distribuției de presiune
Algoritmii numerici propuși, nefiind condiționați de o anumită geometrie de contact (dar cu respectarea ipotezei semispațiului), pot prezice deschiderea contactului în regiunile limitrofe ale ariei de contact. Figurile VI.12 și VI.13 prezintă distribuțiile de presiune pentru un poanson circular racordat apăsat excentric pe un semispațiu elastic cu o sarcină 2W kN= .
12 Contribuții privind rezolvarea problemei contactului normal în domeniul elasto-plastic
Figura IV.12. Profile de presiune în planul 2 0x = ,
la diferite excentricități Figura IV.13. Aria de contact,
la diferite excentricități
O analiză similară a fost făcută pentru cazul contactului liniar de lungime finită încărcat excentric pe direcție longitudinală. Ariile de contact și profilele longitudinale de presiune în planul 2 0x = , pentru raze de racordare și excentricități diferite, sunt prezentate în figurile IV.15 – IV.18.
Figura IV.15. Profile de presiune în planul 2 0x = , 100cR mm= ,
la diferite excentricități
Figura IV.16. Aria de contact, 100cR mm= , la diferite excentricități
Contribuții privind rezolvarea problemei contactului normal în domeniul elasto-plastic 13
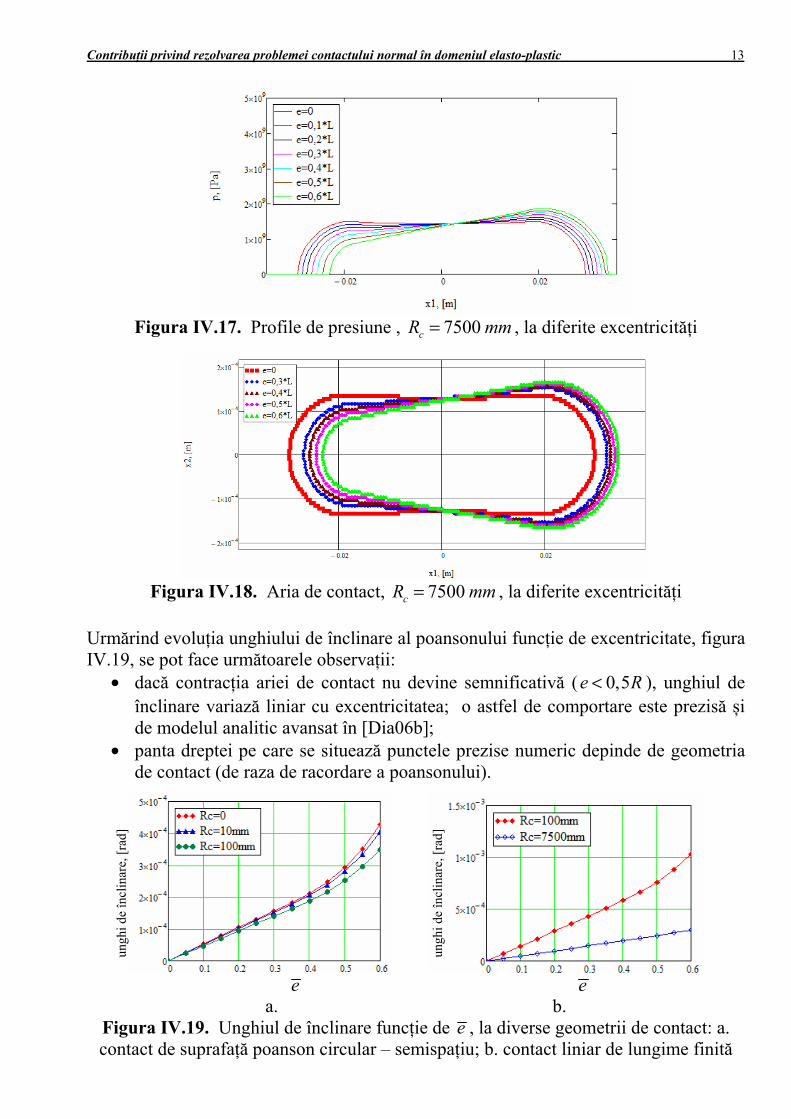
Figura IV.17. Profile de presiune , 7500cR mm= , la diferite excentricități
Figura IV.18. Aria de contact, 7500cR mm= , la diferite excentricități
Urmărind evoluția unghiului de înclinare al poansonului funcție de excentricitate, figura IV.19, se pot face următoarele observații:
• dacă contracția ariei de contact nu devine semnificativă ( 0,5e R< ), unghiul de înclinare variază liniar cu excentricitatea; o astfel de comportare este prezisă și de modelul analitic avansat în [Dia06b];
• panta dreptei pe care se situează punctele prezise numeric depinde de geometria de contact (de raza de racordare a poansonului).
e e
a. b. Figura IV.19. Unghiul de înclinare funcție de e , la diverse geometrii de contact: a. contact de suprafață poanson circular – semispațiu; b. contact liniar de lungime finită
ungh
i de
încl
inar
e, [
rad]
ungh
i de
încl
inar
e, [
rad]
14 Contribuții privind rezolvarea problemei contactului normal în domeniul elasto-plastic
IV.4 CALCULUL STĂRII DE TENSIUNI LA CONTACTUL ELASTIC ÎNCĂRCAT NORMAL ȘI TANGENȚIAL
IV.4.2 Metoda DCFFT
Odată cu implementarea metodelor spectrale în teoria contactului, metoda coeficienților de influență constituie o soluție viabilă în calculul tensiunilor induse de tracțiunile de contact. Componentele tensorului tensiune se pot scrie ca o convoluție bidimensională după direcțiile lui 1x
și 2x
. Implementarea algoritmului DCFFT tridimensional necesită ca pasul rețelei să fie constant și după direcția 3x
.
Pentru fiecare produs de convoluție dintre presiune și o componentă a tensorului tensiune într-un plan 3x = constant, trebuie calculate două transformate Fourier rapide directe și una inversă. Rezultă că, pentru a calcula starea de tensiuni la adâncimea
3x = constant, trebuie evaluate în total șapte transformate Fourier rapide directe (șase pentru componentele tensorului tensiune și una pentru presiune) și șase transformate Fourier rapide inverse. Numărul de transformate poate fi redus dacă se utilizează coeficienți de influență complecși de forma:
1ij ij i ji += +Q Q Q . (IV.3)
Calculul convoluției ij ⊗Q p necesită doar trei transformate Fourier rapide (două directe
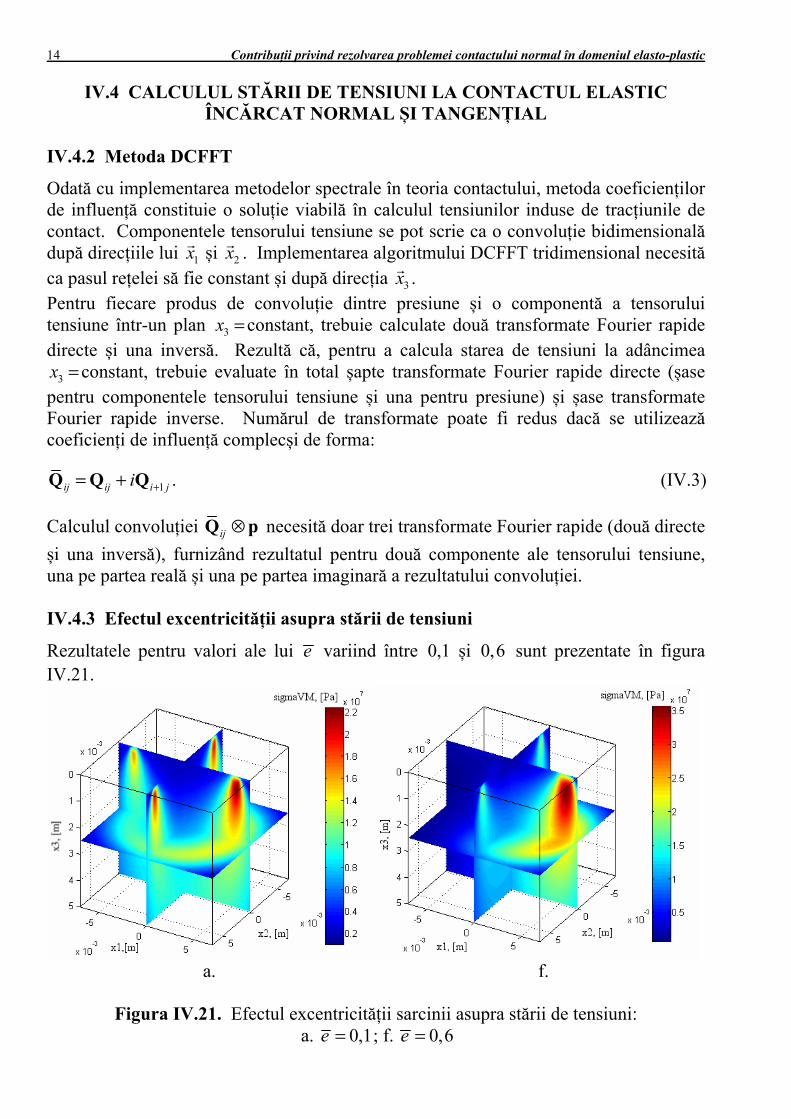
și una inversă), furnizând rezultatul pentru două componente ale tensorului tensiune, una pe partea reală și una pe partea imaginară a rezultatului convoluției. IV.4.3 Efectul excentricității asupra stării de tensiuni
Rezultatele pentru valori ale lui e variind între 0,1 și 0,6 sunt prezentate în figura IV.21.
a. f.
Figura IV.21. Efectul excentricității sarcinii asupra stării de tensiuni:
a. 0,1e = ; f. 0,6e =
Contribuții privind rezolvarea problemei contactului normal în domeniul elasto-plastic 15 IV.5 CONTRIBUȚII LA REZOLVAREA PROBLEMEI STRATULUI ELASTIC
ÎNCĂRCAT SIMETRIC
IV.5.1 Formularea și rezolvarea problemei lui Boussinesq pentru stratul elastic
Dacă ipoteza semispațiului nu se poate aplica (când dimensiunile pe adâncime ale corpurilor în contact sunt comparabile cu cele ale ariei de contact), o nouă teorie, dezvoltată în [Dia08], este necesară pentru rezolvarea modelului matematic al problemei. Punctul de plecare în dezvoltarea acestei noi abordări este, prin analogie cu problema lui Boussinesq, calculul efectului unei forțe punctuale normale acționând pe frontiera unui corp (strat) de grosime finită, numită în continuare problema lui Boussinesq pentru stratul elastic. Modelul a fost rezolvat analitic de Diaconescu și Glovnea, [Dia08a], prin similitudine cu soluția pentru problema lui Boussinesq dezvoltată de Timoshenko și Goodier, [Tim51]. Ei au adăugat soluției problemei lui Boussinesq pentru semispațiu un câmp suplimentar de deplasări, astfel încât suma acestora (conform principiului suprapunerii efectelor) să satisfacă condițiile limită ale problemei nou formulate. Într-o primă etapă, se va urmări determinarea coeficienților de influență pentru răspunsul stratului elastic (deplasări și tensiuni). În final, aplicând principiul suprapunerii efectelor, se va rezolva numeric problema unui strat elastic încărcat bilateral și simetric de poansoane (identice) de formă arbitrară. IV.5.4 Validarea algoritmului
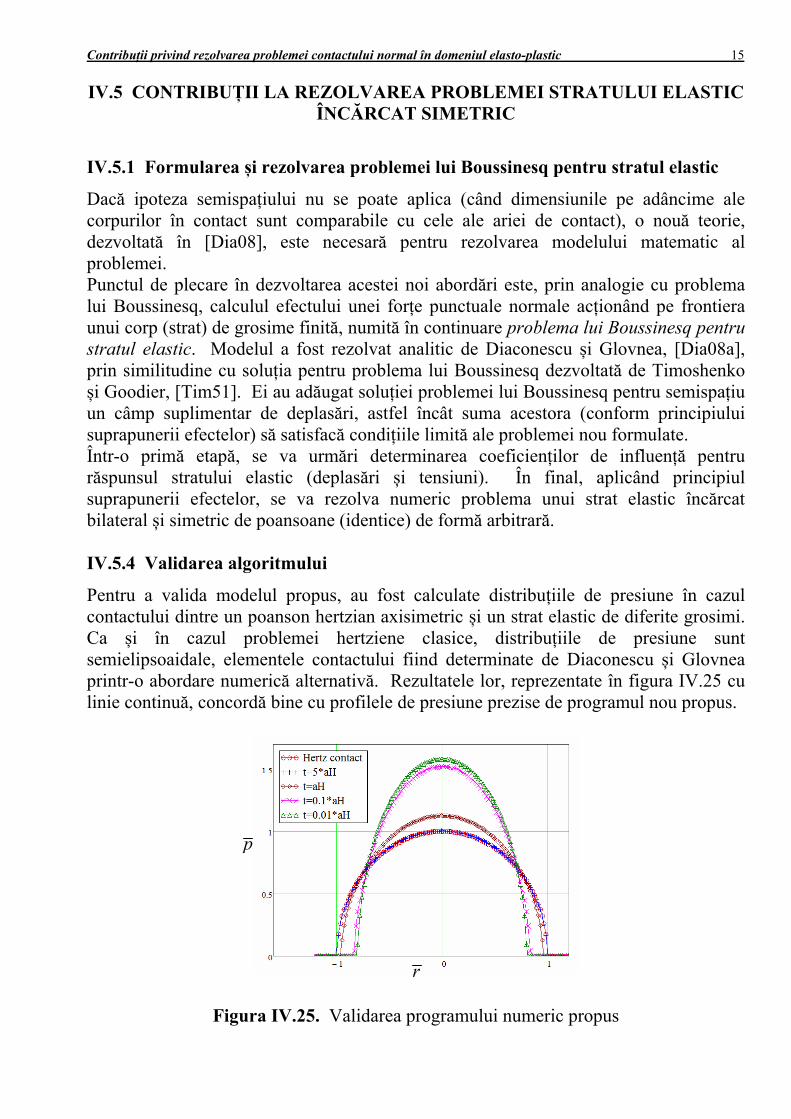
Pentru a valida modelul propus, au fost calculate distribuțiile de presiune în cazul contactului dintre un poanson hertzian axisimetric și un strat elastic de diferite grosimi. Ca și în cazul problemei hertziene clasice, distribuțiile de presiune sunt semielipsoaidale, elementele contactului fiind determinate de Diaconescu și Glovnea printr-o abordare numerică alternativă. Rezultatele lor, reprezentate în figura IV.25 cu linie continuă, concordă bine cu profilele de presiune prezise de programul nou propus.
Figura IV.25. Validarea programului numeric propus
p
r
16 Contribuții privind rezolvarea problemei contactului normal în domeniul elasto-plastic IV.5.5 Simulări numerice
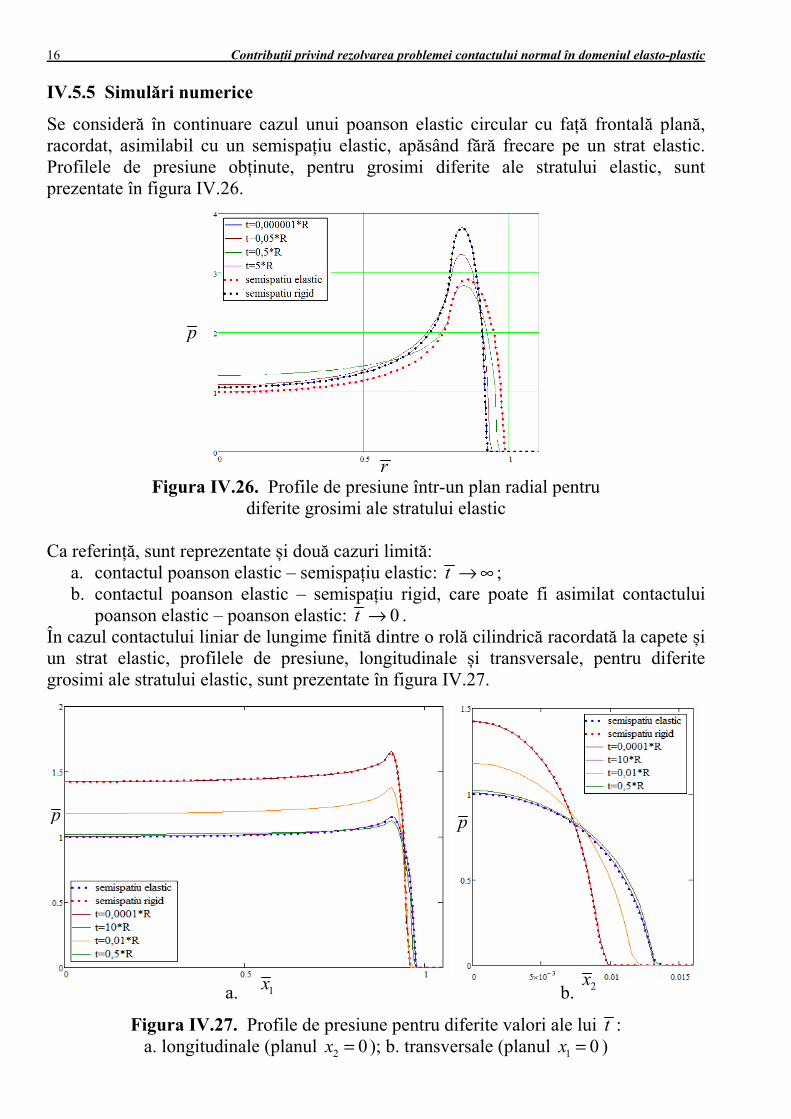
Se consideră în continuare cazul unui poanson elastic circular cu față frontală plană, racordat, asimilabil cu un semispațiu elastic, apăsând fără frecare pe un strat elastic. Profilele de presiune obținute, pentru grosimi diferite ale stratului elastic, sunt prezentate în figura IV.26.
Figura IV.26. Profile de presiune într-un plan radial pentru diferite grosimi ale stratului elastic
Ca referință, sunt reprezentate și două cazuri limită:
a. contactul poanson elastic – semispațiu elastic: t → ∞ ; b. contactul poanson elastic – semispațiu rigid, care poate fi asimilat contactului
poanson elastic – poanson elastic: 0t → . În cazul contactului liniar de lungime finită dintre o rolă cilindrică racordată la capete și un strat elastic, profilele de presiune, longitudinale și transversale, pentru diferite grosimi ale stratului elastic, sunt prezentate în figura IV.27.
a. b.
Figura IV.27. Profile de presiune pentru diferite valori ale lui t : a. longitudinale (planul 2 0x = ); b. transversale (planul 1 0x = )
p p
p
r
1x 2x
Contribuții privind rezolvarea problemei contactului normal în domeniul elasto-plastic 17 IV.5.6 Starea de tensiuni indusă în stratul elastic
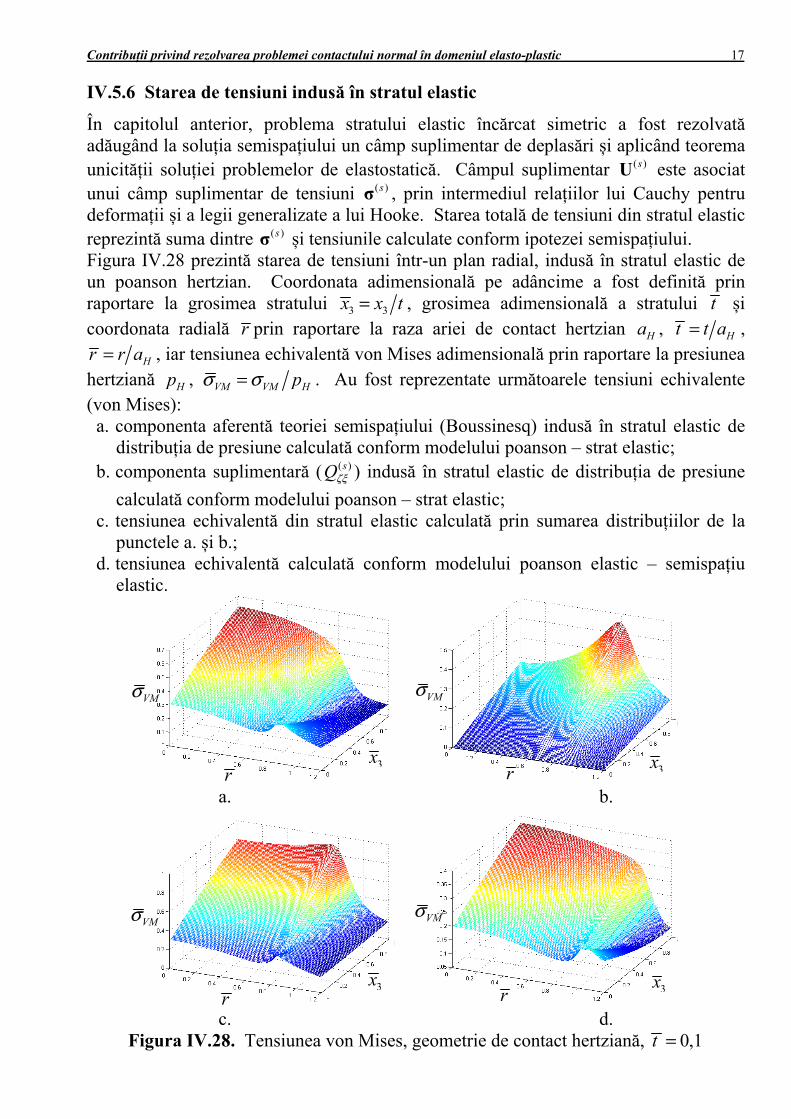
În capitolul anterior, problema stratului elastic încărcat simetric a fost rezolvată adăugând la soluția semispațiului un câmp suplimentar de deplasări și aplicând teorema unicității soluției problemelor de elastostatică. Câmpul suplimentar ( )sU este asociat unui câmp suplimentar de tensiuni ( )sσ , prin intermediul relațiilor lui Cauchy pentru deformații și a legii generalizate a lui Hooke. Starea totală de tensiuni din stratul elastic reprezintă suma dintre ( )sσ și tensiunile calculate conform ipotezei semispațiului. Figura IV.28 prezintă starea de tensiuni într-un plan radial, indusă în stratul elastic de un poanson hertzian. Coordonata adimensională pe adâncime a fost definită prin raportare la grosimea stratului 3 3x x t= , grosimea adimensională a stratului t și coordonata radială r prin raportare la raza ariei de contact hertzian Ha , Ht t a= ,
Hr r a= , iar tensiunea echivalentă von Mises adimensională prin raportare la presiunea hertziană Hp , VM VM Hpσ σ= . Au fost reprezentate următoarele tensiuni echivalente (von Mises):
a. componenta aferentă teoriei semispațiului (Boussinesq) indusă în stratul elastic de distribuția de presiune calculată conform modelului poanson – strat elastic;
b. componenta suplimentară ( ( )sQζξ ) indusă în stratul elastic de distribuția de presiune
calculată conform modelului poanson – strat elastic; c. tensiunea echivalentă din stratul elastic calculată prin sumarea distribuțiilor de la
punctele a. și b.; d. tensiunea echivalentă calculată conform modelului poanson elastic – semispațiu
elastic.
a. b.
c. d.
Figura IV.28. Tensiunea von Mises, geometrie de contact hertziană, 0,1t =
r3x
VMσ
r 3x
VMσ
r
VMσ
3x r 3x
VMσ

18 Contribuții privind rezolvarea problemei contactului normal în domeniul elasto-plastic
V. REZOLVAREA SUBPROBLEMEI REZIDUALE. CONTRIBUȚII
V.1 FORMULAREA DISCRETĂ A SUBPROBLEMEI REZIDUALE
V.1.2 Discretizarea zonei deformată plastic
Deplasările reziduale în orice punct de pe limita semispațiului, respectiv tensiunile reziduale induse în orice punct din semispațiu, se exprimă , conform principiului suprapunerii efectelor, ca suma contribuțiilor individuale ale tuturor paralelipipedelor de deformații plastice uniforme. Contribuția individuală a unui paralelipiped dreptunghic de deformații plastice unitare distribuite uniform 1p p
k kε ε= = , la deplasările normale reziduale ale frontierei 3ru ,
reprezintă coeficientul de influență kD . Deplasările normale reziduale ale frontierei ru
induse de o distribuție pε arbitrară, dar cunoscută, se calculează cu relația:
3( , , )
( , ) ( , , ) ( , , )pn
r p
m n
u i j m n D i j m nζξ ζξε∈Ω
= − −
. (V.1)
În mod similar, contribuția individuală a unui paralelipiped dreptunghic de deformații plastice unitare distribuite uniform 1p p
k kε ε= = la tensiunile reziduale rijσ induse în
semispațiul neîncărcat pe planul limitrof, reprezintă coeficientul de influență aferent, notat în continuare cu ijklA . Starea de tensiuni reziduale rσ induse în semispațiu de o
distribuție pε arbitrară, dar cunoscută, se calculează cu relația:
( , , )
( , , ) ( , , ) ( , , )pn
r p
m n
i j k A i j m k n m nξζ ξζςγ ςγσ ε∈Ω
= − − −
, (V.2)
unde A este un tensor de ordinul patru, a cărui determinare va fi detaliată în continuare.
V.2 CALCULUL COMPONENTEI REZIDUALE A DEPLASĂRII Efectul benefic al discretizării distribuției deformațiilor plastice îl constituie scoaterea termenului 1 2 3( , , )p
ij x x xε ′ ′ ′ în afara integralei. Punând în evidență indicii celulelor de
deformații plastice uniforme, rezultă varianta digitizată a relației (II.12):
(
( )3 3 2 2 1 1
3
3 3 2 2 1 1
3( , , )
( ) 2 ( ) 2 ( ) 2
1 2 1 2 3
( ) 2 ( ) 2 ( ) 2
( , ,0) 2 ( , , )
( ), ( ), ,
pn
r p
m n
x n x m xu
x n x m x
u i j m n
G x i m x j n dx dx dx
ζξ
ζξ
μ ε
∗
∈Ω
+Δ +Δ +Δ
−Δ −Δ −Δ
= ×
′ ′ ′× − −
(V.3)
Contribuții privind rezolvarea problemei contactului normal în domeniul elasto-plastic 19 cu 3uG
∗
funcțiile Green aferente. În cazul de față, este vorba despre deplasările
3 , 1,3iu i∗ = , generate într-un punct al semispațiului de o forță unitară orientată după direcția lui 3x
, aplicată pe frontiera semispațiului în origine; acestea sunt date de
relațiile lui Boussinesq.
V.3 CONTRIBUȚII LA CALCULUL TENSIUNILOR REZIDUALE V.3.2 Descompunerea subproblemei tensiunilor reziduale
Problema tensiunilor reziduale induse în semispațiul elastic și izotrop, neîncărcat pe frontieră, de o regiune de deformații plastice uniforme de forma unui paralelipiped dreptunghic, a fost rezolvată în premieră de Chiu, [Chi78]. Pentru construcția soluției, el consideră soluțiile individuale a două probleme și le aplică principiul suprapunerii, obținând o problemă de elastostatică cu condiții limită similare celei puse inițial. Utilizând apoi teorema de unicitate a soluției unei probleme de elastostatică, rezultă că soluția obținută este de fapt soluția problemei. Cele două subprobleme utilizate sunt (figura V.1):
1. problema tensiunilor reziduale induse într-un semispațiu infinit de un paralelipiped dreptunghic de deformații plastice unitare distribuite uniform, rezolvată de Chiu, [Chi77];
2. problema tensiunilor induse în semispațiu de o distribuția cunoscută de tracțiuni normale aplicate pe frontiera semispațiului.
= + _
Figura V.1. Descompunerea problemei tensiunilor elastice reziduale induse în semispațiu de un paralelipiped dreptunghic de deformații plastice unitare distribuite
uniform
V.3.3 Contribuții la calculul tensiunilor reziduale induse în spațiul elastic de o distribuție arbitrară de deformații plastice
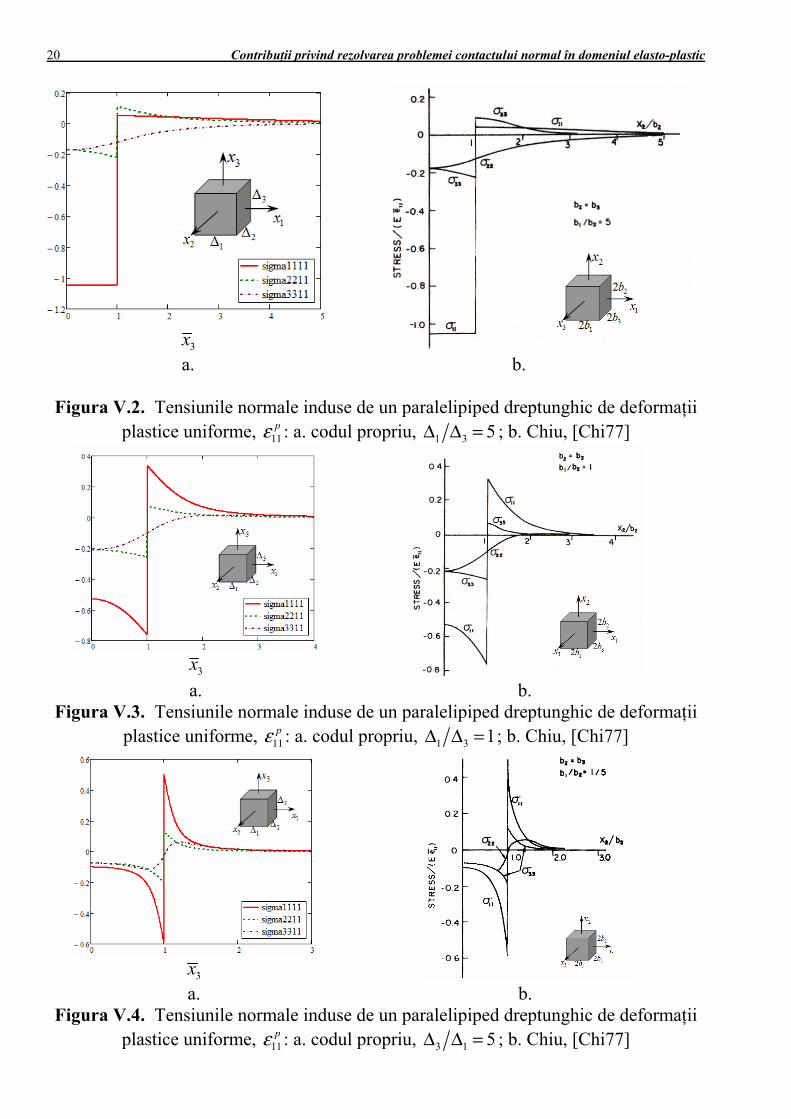
Pentru validarea formulelor pentru coeficienții de influență ce exprimă tensiunile reziduale induse în spațiul infinit de un paralelipiped de deformații plastice uniforme p
ijkA , predicțiile programului numeric propriu au fost comparate cu rezultate
publicate de Chiu, [Chi77] sau Liu și Wang, [Liu05]. În figurile V.2 – V.5, sunt reprezentate distribuțiile pe direcția 3x′ ale unor tensiuni adimensionale induse de un paralelipiped dreptunghic de diferite configurații, centrat în origine, în care deformațiile plastice sunt nule, cu excepția 11
pε .
pε pε
pmε (0)33p pmσ +
20 Contribuții privind rezolvarea problemei contactului normal în domeniul elasto-plastic
3x a. b.
Figura V.2. Tensiunile normale induse de un paralelipiped dreptunghic de deformații
plastice uniforme, 11pε : a. codul propriu, 1 3 5Δ Δ = ; b. Chiu, [Chi77]
3x
a. b. Figura V.3. Tensiunile normale induse de un paralelipiped dreptunghic de deformații
plastice uniforme, 11pε : a. codul propriu, 1 3 1Δ Δ = ; b. Chiu, [Chi77]
3x
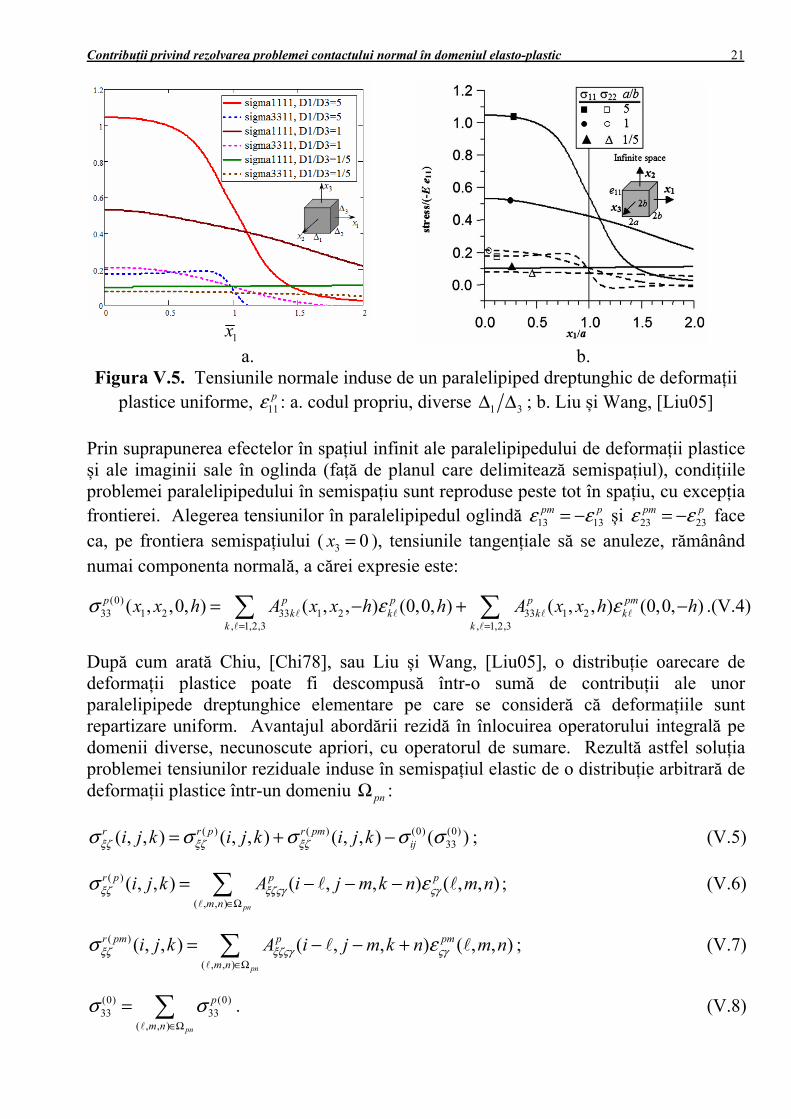
a. b. Figura V.4. Tensiunile normale induse de un paralelipiped dreptunghic de deformații
plastice uniforme, 11pε : a. codul propriu, 3 1 5Δ Δ = ; b. Chiu, [Chi77]
Contribuții privind rezolvarea problemei contactului normal în domeniul elasto-plastic 21
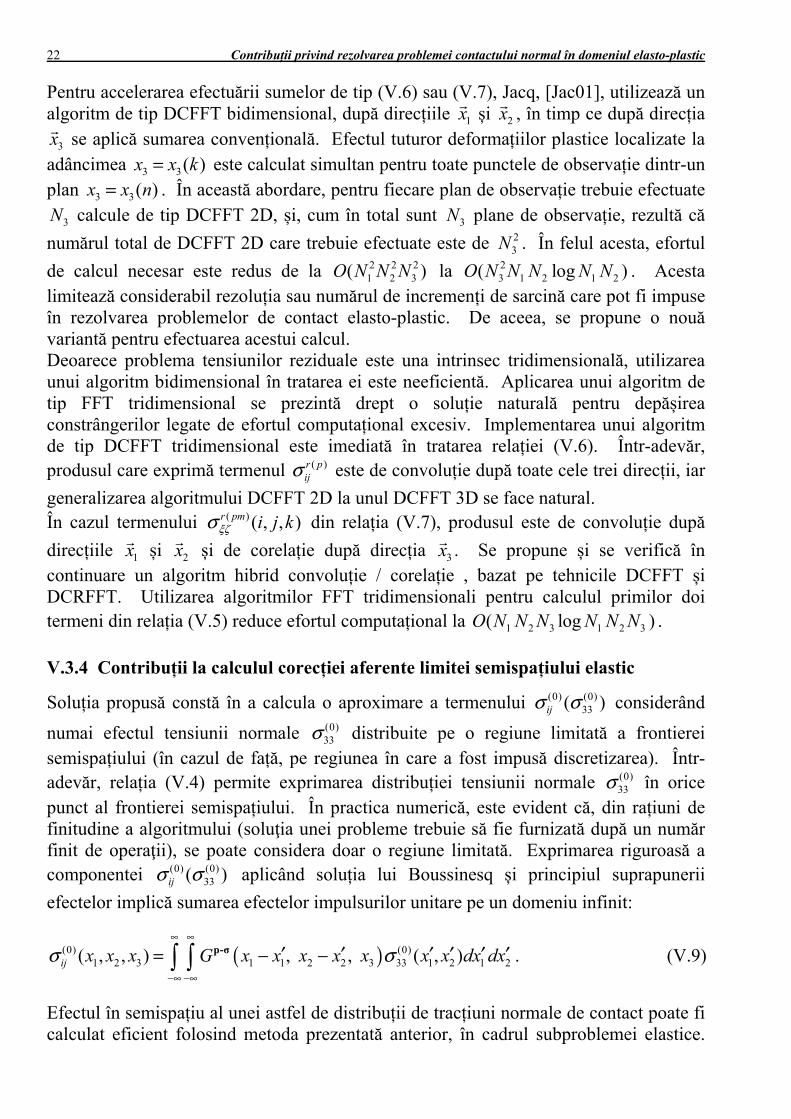
1x a. b.
Figura V.5. Tensiunile normale induse de un paralelipiped dreptunghic de deformații plastice uniforme, 11
pε : a. codul propriu, diverse 1 3Δ Δ ; b. Liu și Wang, [Liu05] Prin suprapunerea efectelor în spațiul infinit ale paralelipipedului de deformații plastice și ale imaginii sale în oglinda (față de planul care delimitează semispațiul), condițiile problemei paralelipipedului în semispațiu sunt reproduse peste tot în spațiu, cu excepția frontierei. Alegerea tensiunilor în paralelipipedul oglindă 13 13
pm pε ε= − și 23 23pm pε ε= − face
ca, pe frontiera semispațiului ( 3 0x = ), tensiunile tangențiale să se anuleze, rămânând numai componenta normală, a cărei expresie este:
(0)33 1 2 33 1 2 33 1 2
, 1,2,3 , 1,2,3
( , ,0, ) ( , , ) (0,0, ) ( , , ) (0,0, )p p p p pmk k k k
k k
x x h A x x h h A x x h hσ ε ε= =
= − + −
.(V.4)
După cum arată Chiu, [Chi78], sau Liu și Wang, [Liu05], o distribuție oarecare de deformații plastice poate fi descompusă într-o sumă de contribuții ale unor paralelipipede dreptunghice elementare pe care se consideră că deformațiile sunt repartizare uniform. Avantajul abordării rezidă în înlocuirea operatorului integrală pe domenii diverse, necunoscute apriori, cu operatorul de sumare. Rezultă astfel soluția problemei tensiunilor reziduale induse în semispațiul elastic de o distribuție arbitrară de deformații plastice într-un domeniu pnΩ :
( ) ( ) (0) (0)33( , , ) ( , , ) ( , , ) ( )r r p r pm
iji j k i j k i j kξζ ξζ ξζσ σ σ σ σ= + − ; (V.5)
( )
( , , )
( , , ) ( , , ) ( , , )pn
r p p p
m n
i j k A i j m k n m nξζ ξζςγ ςγσ ε∈Ω
= − − −
; (V.6)
( )
( , , )
( , , ) ( , , ) ( , , )pn
r pm p pm
m n
i j k A i j m k n m nξζ ξζςγ ςγσ ε∈Ω
= − − +
; (V.7)
(0) (0)33 33
( , , ) pn
p
m n
σ σ∈Ω
=
. (V.8)
22 Contribuții privind rezolvarea problemei contactului normal în domeniul elasto-plastic Pentru accelerarea efectuării sumelor de tip (V.6) sau (V.7), Jacq, [Jac01], utilizează un algoritm de tip DCFFT bidimensional, după direcțiile 1x
și 2x
, în timp ce după direcția
3x
se aplică sumarea convențională. Efectul tuturor deformațiilor plastice localizate la adâncimea 3 3( )x x k= este calculat simultan pentru toate punctele de observație dintr-un plan 3 3( )x x n= . În această abordare, pentru fiecare plan de observație trebuie efectuate
3N calcule de tip DCFFT 2D, și, cum în total sunt 3N plane de observație, rezultă că
numărul total de DCFFT 2D care trebuie efectuate este de 23N . În felul acesta, efortul
de calcul necesar este redus de la 2 2 21 2 3( )O N N N la 2
3 1 2 1 2( log )O N N N N N . Acesta limitează considerabil rezoluția sau numărul de incremenți de sarcină care pot fi impuse în rezolvarea problemelor de contact elasto-plastic. De aceea, se propune o nouă variantă pentru efectuarea acestui calcul. Deoarece problema tensiunilor reziduale este una intrinsec tridimensională, utilizarea unui algoritm bidimensional în tratarea ei este neeficientă. Aplicarea unui algoritm de tip FFT tridimensional se prezintă drept o soluție naturală pentru depășirea constrângerilor legate de efortul computațional excesiv. Implementarea unui algoritm de tip DCFFT tridimensional este imediată în tratarea relației (V.6). Într-adevăr, produsul care exprimă termenul ( )r p
ijσ este de convoluție după toate cele trei direcții, iar
generalizarea algoritmului DCFFT 2D la unul DCFFT 3D se face natural. În cazul termenului ( ) ( , , )r pm i j kξζσ din relația (V.7), produsul este de convoluție după
direcțiile 1x
și 2x
și de corelație după direcția 3x
. Se propune și se verifică în continuare un algoritm hibrid convoluție / corelație , bazat pe tehnicile DCFFT și DCRFFT. Utilizarea algoritmilor FFT tridimensionali pentru calculul primilor doi termeni din relația (V.5) reduce efortul computațional la 1 2 3 1 2 3( log )O N N N N N N . V.3.4 Contribuții la calculul corecției aferente limitei semispațiului elastic
Soluția propusă constă în a calcula o aproximare a termenului (0) (0)33( )ijσ σ considerând
numai efectul tensiunii normale (0)33σ distribuite pe o regiune limitată a frontierei
semispațiului (în cazul de față, pe regiunea în care a fost impusă discretizarea). Într-adevăr, relația (V.4) permite exprimarea distribuției tensiunii normale (0)
33σ în orice punct al frontierei semispațiului. În practica numerică, este evident că, din rațiuni de finitudine a algoritmului (soluţia unei probleme trebuie să fie furnizată după un număr finit de operaţii), se poate considera doar o regiune limitată. Exprimarea riguroasă a componentei (0) (0)
33( )ijσ σ aplicând soluția lui Boussinesq și principiul suprapunerii
efectelor implică sumarea efectelor impulsurilor unitare pe un domeniu infinit:
( )(0) (0)1 2 3 1 1 2 2 3 33 1 2 1 2( , , ) , , ( , )ij x x x G x x x x x x x dx dxσ σ
∞ ∞
−∞ −∞
′ ′ ′ ′ ′ ′= − − p-σ . (V.9)
Efectul în semispațiu al unei astfel de distribuții de tracțiuni normale de contact poate fi calculat eficient folosind metoda prezentată anterior, în cadrul subproblemei elastice.
Contribuții privind rezolvarea problemei contactului normal în domeniul elasto-plastic 23 Diferența față de termenul din (V.9) constă în aceea că nu este cuantificată contribuția tuturor tracțiunilor induse pe limita semispațiului, ci numai a celor repartizate pe regiunea discretizată. Cu alte cuvinte, integrala pe un domeniu infinit din (V.9) se exprimă printr-o sumă pe un număr finit de subdomenii elementare:
1 2(0) (0)
331 1
( , , ) ( , , ) ( , ,0)N N
k
i j m Q i k j m kζξ ζξσ σ= =
= − − ⋅
. (V.10)
Termenul din (V.10) poate fi calculat în doar 1 2 3 1 2( log )O N N N N N , adică în 3N
convoluții 2D, câte una pentru fiecare strat 3 3( )x x m= , 31,m N= . Prin comparație,
algoritmul inițial era de ordinul 21 2 3 1 2( log )O N N N N N , deoarece necesita 2
3N algoritmi DCFFT 2D. Renunțarea la exprimarea explicită a contribuției tensiunilor de pe frontieră în funcție de distribuția de deformații plastice comportă avantajele următoare:
• coeficienții de influență care leagă starea de tensiuni din semispațiu de tracțiunile de contact au fost deja calculați în cadrul subproblemei elastice;
• în cazul exprimării explicite a tensiunilor funcție de pε , sursa (mărimea care generează efectul, cu alte cuvinte, deformația plastică) are o distribuție tridimensională; în varianta nou propusă, noua sursă (distribuția de tracțiuni normale pe frontieră), are o distribuție bidimensională.
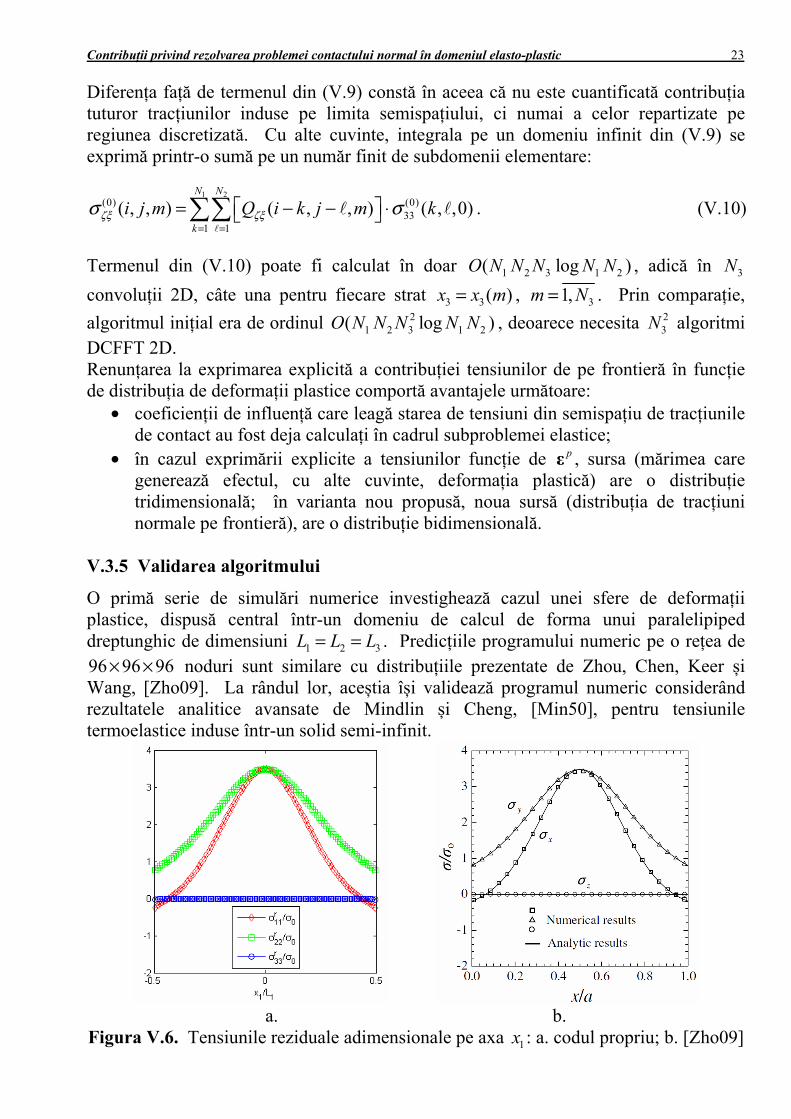
V.3.5 Validarea algoritmului
O primă serie de simulări numerice investighează cazul unei sfere de deformații plastice, dispusă central într-un domeniu de calcul de forma unui paralelipiped dreptunghic de dimensiuni 1 2 3L L L= = . Predicțiile programului numeric pe o rețea de 96 96 96× × noduri sunt similare cu distribuțiile prezentate de Zhou, Chen, Keer și Wang, [Zho09]. La rândul lor, aceștia își validează programul numeric considerând rezultatele analitice avansate de Mindlin și Cheng, [Min50], pentru tensiunile termoelastice induse într-un solid semi-infinit.
a. b.
Figura V.6. Tensiunile reziduale adimensionale pe axa 1x : a. codul propriu; b. [Zho09]
24 Contribuții privind rezolvarea problemei contactului normal în domeniul elasto-plastic
a. b.
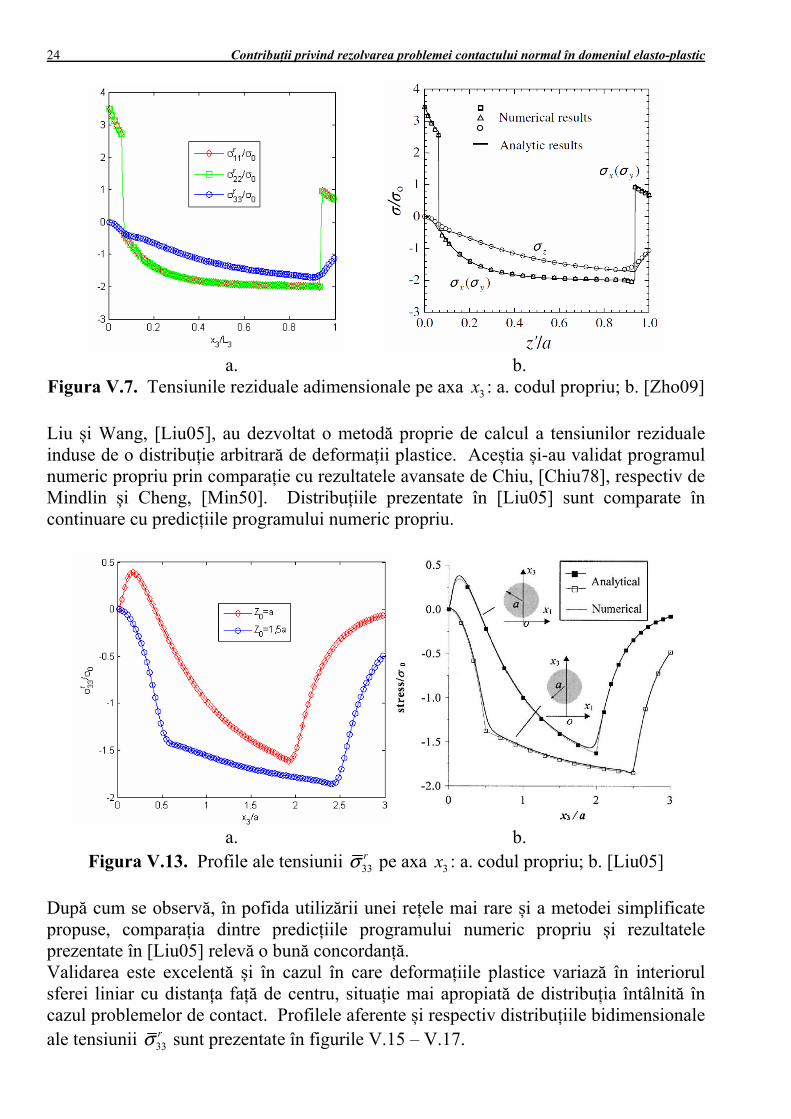
Figura V.7. Tensiunile reziduale adimensionale pe axa 3x : a. codul propriu; b. [Zho09] Liu și Wang, [Liu05], au dezvoltat o metodă proprie de calcul a tensiunilor reziduale induse de o distribuție arbitrară de deformații plastice. Aceștia și-au validat programul numeric propriu prin comparație cu rezultatele avansate de Chiu, [Chiu78], respectiv de Mindlin și Cheng, [Min50]. Distribuțiile prezentate în [Liu05] sunt comparate în continuare cu predicțiile programului numeric propriu.
a. b.
Figura V.13. Profile ale tensiunii 33rσ pe axa 3x : a. codul propriu; b. [Liu05]
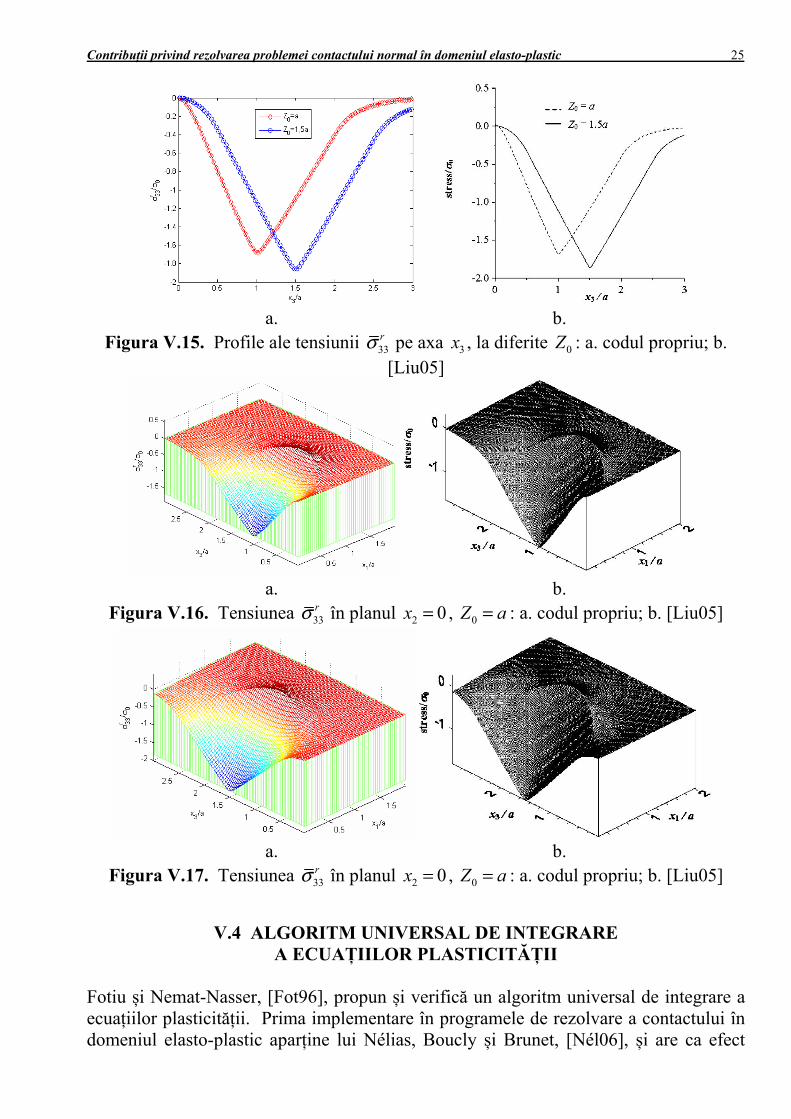
După cum se observă, în pofida utilizării unei rețele mai rare și a metodei simplificate propuse, comparația dintre predicțiile programului numeric propriu și rezultatele prezentate în [Liu05] relevă o bună concordanță. Validarea este excelentă și în cazul în care deformațiile plastice variază în interiorul sferei liniar cu distanța față de centru, situație mai apropiată de distribuția întâlnită în cazul problemelor de contact. Profilele aferente și respectiv distribuțiile bidimensionale ale tensiunii 33
rσ sunt prezentate în figurile V.15 – V.17.
Contribuții privind rezolvarea problemei contactului normal în domeniul elasto-plastic 25
a. b.
Figura V.15. Profile ale tensiunii 33rσ pe axa 3x , la diferite 0Z : a. codul propriu; b. [Liu05]
a. b.
Figura V.16. Tensiunea 33rσ în planul 2 0x = , 0Z a= : a. codul propriu; b. [Liu05]
a. b.
Figura V.17. Tensiunea 33rσ în planul 2 0x = , 0Z a= : a. codul propriu; b. [Liu05]
V.4 ALGORITM UNIVERSAL DE INTEGRARE A ECUAȚIILOR PLASTICITĂȚII
Fotiu și Nemat-Nasser, [Fot96], propun și verifică un algoritm universal de integrare a ecuațiilor plasticității. Prima implementare în programele de rezolvare a contactului în domeniul elasto-plastic aparține lui Nélias, Boucly și Brunet, [Nél06], și are ca efect
26 Contribuții privind rezolvarea problemei contactului normal în domeniul elasto-plastic reducerea cu un ordin de mărime a timpilor de calcul, prin renunțarea la bucla reziduală bazată pe legea Prandtl-Reuss. Simulările numerice sunt efectuate în ipoteza unei legi izotrope de comportare a materialului elasto-plastic. Ulterior, Chen, Wang, Wang, Keer și Cao, [Che08b], utilizează același algoritm, dar consideră o lege de ecruisare cinematică, modelată de legea lui Armstrong și Frederick. Conform teoriei generale a plasticității, curgerea se produce când funcția de curgere îndeplinește inegalitatea:
( ) ( ) 0p pVMf e k eσ= − > , (V.11)
unde k este funcția tensiunii de curgere. Prin curgerea plastică a materialului, suprafața de curgere se modifică, iar incrementul deformației plastice cumulate peδ trebuie să satisfacă ecuația noii suprafețe de curgere:
( ) 0p pf e eδ+ = . (V.12)
Relația (V.12) poate fi privită ca o ecuație în peδ , care poate fi rezolvată prin metoda Newton-Raphson. Prin liniarizare după direcția corectorului plastic peδ , se poate scrie:
( )( ) ( ) 0
pp p p p
p
f ef e e f e e
eδ δ ∂+ = + =
∂. (V.13)
Din această relație rezultă următoarea expresie a corectorului plastic:
( ) ( )( ) ( )
p pp p p VM
p p p
f e k ee f e f e
e e eσδ ∂ ∂ ∂= − = − ∂ ∂ ∂
. (V.14)
Metoda descrisă oferă o cale eficientă de calcul a deviatorului tensiunilor în punctele în care se produce curgerea plastică, dar nu permite actualizarea tensiunilor în regiunea nedeformată plastic, în funcție de evoluția zonei deformate plastic.
VI. REZOLVAREA PROBLEMEI CONTACTULUI ÎN
DOMENIUL ELASTO-PLASTIC. CONTRIBUȚII
VI.1 CONTRIBUȚII LA DEZVOLTAREA UNUI MODEL SIMPLIFICAT DE CALCUL A DISTRIBUȚIEI DE PRESIUNE PENTRU CONTACTELE ÎN
DOMENIUL ELASTIC – PERFECT PLASTIC
După cum arată Spînu, [Spi06a], metoda propusă de Polonsky și Keer, [Pol99], pentru contactul elastic poate fi modificată pentru a prezice aria de contact și distribuția de presiune în ipoteza unei comportări elastic - perfect plastice a materialului corpurilor în contact. Într-o abordare simplificată a problemei contactului în domeniul elastic – perfect plastic, o serie de autori, printre care Crețu și Hatmanu, [Cre85], Popescu, [Pop98],
Contribuții privind rezolvarea problemei contactului normal în domeniul elasto-plastic 27 Popescu și Crețu, [Pop98a], Prodan și Diaconescu, [Pro03] sau Prodan, [Pro05], calculează presiunea și aria de contact după modelul elastic (considerând în ecuația de interferență doar contribuția presiunii la deplasarea normală). Contribuția deformațiilor plastice (modificarea permanentă a geometriei de contact) este considerată indirect, prin impunerea unei limite superioare a presiunii pe aria de contact. Printr-o asemenea abordare, predicțiile privind distribuția de presiune și aria de contact pot avea o precizie satisfăcătoare, dar starea de tensiuni și de deformații plastice din interiorul corpurilor nu sunt deduse explicit.
VI.2 REZOLVAREA PROBLEMEI CONTACTULUI ÎN DOMENIUL ELASTO-PLASTIC
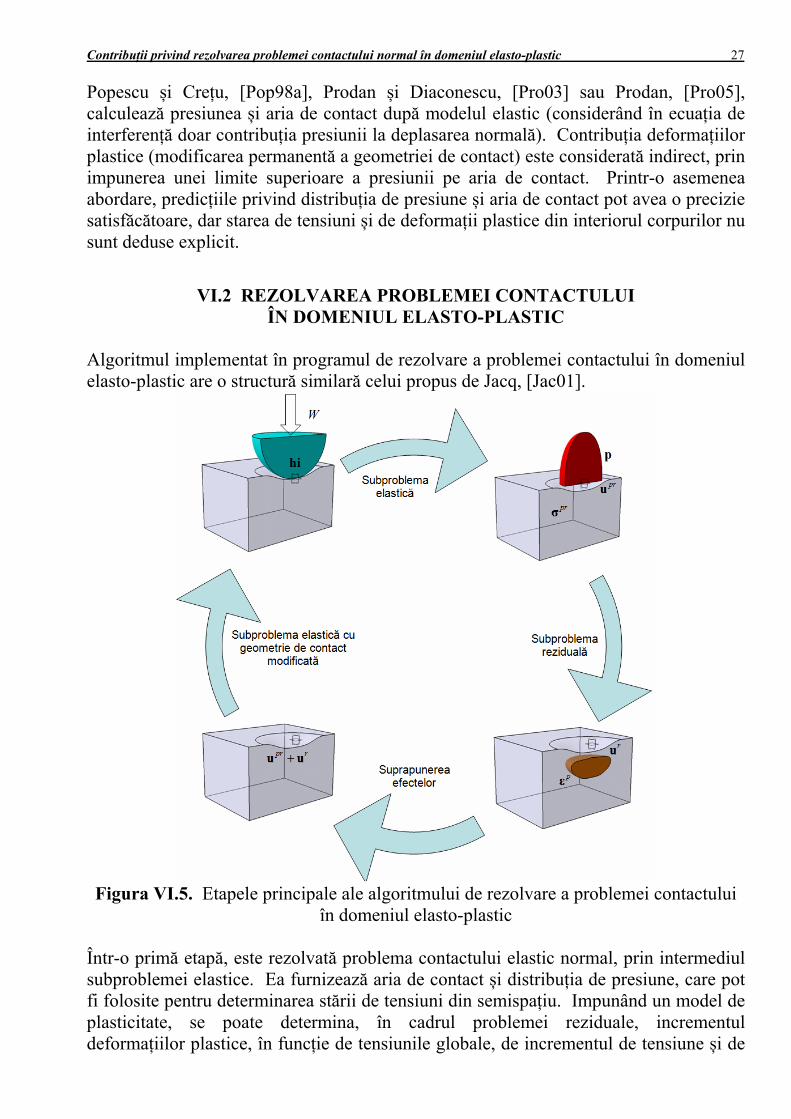
Algoritmul implementat în programul de rezolvare a problemei contactului în domeniul elasto-plastic are o structură similară celui propus de Jacq, [Jac01].
Figura VI.5. Etapele principale ale algoritmului de rezolvare a problemei contactului
în domeniul elasto-plastic Într-o primă etapă, este rezolvată problema contactului elastic normal, prin intermediul subproblemei elastice. Ea furnizează aria de contact și distribuția de presiune, care pot fi folosite pentru determinarea stării de tensiuni din semispațiu. Impunând un model de plasticitate, se poate determina, în cadrul problemei reziduale, incrementul deformațiilor plastice, în funcție de tensiunile globale, de incrementul de tensiune și de
28 Contribuții privind rezolvarea problemei contactului normal în domeniul elasto-plastic starea de ecruisare. Cunoașterea zonei deformate plastic permite evaluarea modificărilor geometriei de contact determinate de curgerea plastică. Contribuția componentei reziduale a deplasării este inclusă în ecuația de interferență a problemei elastice normale inițiale, rezultând o problemă de contact elastic normal cu geometrie modificată. Aceasta este rezolvată, rezultând o nouă distribuție de presiune. Ciclul prezentat este reluat apoi până la atingerea convergenței. Algoritmul lui Jacq, [Jac01], este structurat pe trei niveluri iterative, care vor fi descrise în continuare, în ordinea indicată:
1. bucla de încărcare, prin care se realizează incrementarea nivelului sarcinii; 2. bucla elastică de rezolvare a problemei contactului elastic normal cu geometrie
de contact modificată, internă buclei de încărcare; 3. bucla reziduală pentru determinarea incrementului pδε al deformațiilor plastice,
internă buclei elastice. Din analiza algoritmului prezentat și a simulărilor numerice efectuate pe baza acestuia se pot evidenția concluziile enumerate în continuare.
1. Efortul de calcul necesar pentru rezolvarea pe această cale a problemei contactului în domeniul elasto-plastic este însemnat, în special datorită structurării algoritmului pe trei niveluri iterative. Într-adevăr, dacă se notează cu
WN numărul de iterații al buclei de încărcare, iar cu EN și RN numărul mediu de iterații necesar pentru atingerea convergenței buclelor elastică, respectiv reziduală, atunci numărul total de iterații al buclei reziduale, care trebuie efectuat pentru rezolvarea problemei contactului, este dat de relația:
W E RN N N N= . (VI.1)
2. La fiecare iterație a buclei reziduale, trebuie calculat incrementul tensiunilor reziduale induse de nivelul curent al incrementului deformațiilor plastice. Acest calcul necesită, în varianta îmbunătățită propusă în capitolul cinci, efectuarea a două produse de convoluție/corelație tridimensională pe serii de 1 2 3N N N× × termeni și a 3N convoluții bidimensionale pe serii de 1 2N N× termeni. Deși avansul față de varianta clasică, propusă de Jacq, [Jac01], este considerabil, necesarul de memorie și de timp procesor rămâne însemnat și reduce considerabil rezoluția care poate fi impusă.
3. Bucla reziduală converge relativ lent. Din simulările numerice efectuate utilizând acest algoritm, a rezultat că până la 100 iterații au fost necesare pentru atingerea unui criteriu de precizie 1 0,1%eps = . Acest rezultat este consistent cu valoarea maximală 80RN = indicată de Wang și Keer, [Wan05].
4. Viteza de convergență a buclei reziduale poate fi crescută prin utilizarea unei aproximații inițiale conform metodei FCM propuse de Wang și Keer, [Wan05]. Aceasta are la bază observația că, dacă incrementul deplasărilor reziduale este suficient de mic, incrementul nou calculat al deformațiilor plastice nu diferă semnificativ de la o iterația la alta a buclei elastice. În practica numerică, aproximațiile inițiale pentru mărimile care urmează a fi iterate sunt de obicei inițializate cu o valoare nulă. Această abordare este consistentă pentru prima iterație a buclei elastice; pentru iterațiile următoare însă, reinițializarea cu o
Contribuții privind rezolvarea problemei contactului normal în domeniul elasto-plastic 29
valoare nulă a incrementului deformațiilor plastice nu este rentabilă din punctul de vedere al efortului de calcul. Adoptând, conform FCM, o aproximație inițială egală cu valoarea de convergență a buclei reziduale precedente, viteza de convergență a buclei reziduale crește considerabil. În simulările numerice efectuate, a fost observată o reducere a RN cu un factor 10
RNf < .
5. Viteza de convergență a buclei elastice, alături de cea a buclei reziduale, influențează considerabil efortul de calcul global, deoarece, la fiecare iterație a buclei elastice, se execută RN iterații ale buclei reziduale. Principiul FCM enunțat pentru aproximația inițială a buclei reziduale se aplică și în cazul celei pentru bucla elastică. Într-adevăr, dacă incremenții de sarcină sunt suficient de mici, incremenții deplasărilor reziduale calculați în două iterații consecutive ale buclei de încărcare nu diferă semnificativ. De aceea, preluarea valorii de convergență a unei iterații (a buclei de încărcare) ca aproximație inițială pentru iterația următoare crește viteza de convergență a buclei elastice, fapt confirmat și de simulările numerice efectuate.
VI.3 CONTRIBUȚII LA REZOLVAREA PROBLEMEI CONTACTULUI ÎN DOMENIUL ELASTO-PLASTIC
VI.3.1 Algoritm îmbunătățit de rezolvare a problemei contactului în domeniul elasto-plastic Algoritmul propus de Jacq, [Jac01], este rafinat în această lucrare pe două direcții.
1. Subrutina de calcul al tensiunilor reziduale este modificată prin implementarea metodei simplificate propuse în capitolul cinci. Din simulările numerice efectuate, a rezultat că metoda produce rezultate de precizie ridicată pentru distribuțiile de deformații plastice specifice problemelor de contact elasto-plastic. Implementarea metodei reduce considerabil necesarul de memorie și efortul de calcul aferent estimării tensiunilor reziduale, permițând impunerea unor rețele mai dense și / sau a unor incremenți de sarcină mai mici.
2. Subrutina de calcul al incrementului deformațiilor plastice a fost înlocuită cu una bazată pe algoritmul universal de integrare a ecuațiilor plasticității propus de Fotiu și Nemat-Nasser, [Fot96], în varianta return-mapping cu predictor elastic și corector plastic.
În esență, bucla reziduală de iterare a incrementului deformațiilor plastice este înlocuită cu iterația Newton-Raphson a deformației plastice cumulate. Odată determinate deformațiile plastice, poate fi exprimată contribuția acestora la deplasările normale ale frontierei, respectiv la starea de tensiuni din semispațiu. Aceste calcule, intens consumatoare de resurse, trebuie efectuate, în varianta nou propusă, o singură dată la finalul buclei reziduale, cu alte cuvinte, o singură dată la fiecare iterație a buclei elastice. Aceasta se traduce printr-o reducere considerabilă a efortului de calcul. Implementarea algoritmului de return-mapping cu predictor elastic și corector plastic aduce următoarele îmbunătățiri:
30 Contribuții privind rezolvarea problemei contactului normal în domeniul elasto-plastic
• după cum indică Fotiu și Nemat-Nasser, [Fot96], algoritmul de calcul al incrementului deformațiilor plastice este stabil și precis atât pentru legi de ecruisare izotropă, cât și cinematică;
• deoarece algoritmul nu se bazează pe liniarizarea la începutul incrementului, ci consideră natura non-liniară a ecuațiilor constitutive ale plasticității pe tot parcursul incrementului, el poate fi utilizat și în ipoteza unor incremenți de sarcină mai mari;
• algoritmul este unul iterativ de tip Newton-Raphson, iar viteza de convergență a metodelor de acest tip este superliniară; în simulările numerice efectuate, patru iterații au fost suficiente pentru atingerea criteriilor de convergență, spre deosebire de o sută de iterații, în cazul metodei lui Jacq;
• în metoda clasică, mărimea iterată (incrementul deformațiilor plastice) este tensorială; în algoritmul nou-propus, mărimea iterată (deformația plastică cumulată) este scalară;
• în metoda clasică, dependența incrementului tensiunilor reziduale de incrementul deformațiilor plastice trebuie exprimată la fiecare iterație; în metoda nou propusă, acest calcul, intens consumator de resurse, nu este necesar pentru determinarea lui pδε ;
• contribuția deformațiile plastice prin intermediul tensiunilor reziduale la câmpul total de tensiuni trebuie calculată o singură dată în finalul buclei reziduale.
VI.3.2 Simulări numerice proprii. Validarea algoritmului
Un prim set de simulări vizează cazul unei sfere elastice apăsate centric pe un semispațiu elasto-plastic. Parametrii geometriei de contact și caracteristicile mecanice ale materialelor sunt prezentate în tabelul VI.1. Pentru corpul cu comportare elasto-plastică a fost ales un oțel specific aplicațiilor aeronautice, utilizat și de Boucly, Nélias și Green, [Bou07] în simulările numerice proprii. Tabelul VI.1. Datele de intrare ale problemei
Geometria de contact
Tip de comportare
Parametri elastici
Lege de ecruisare
corp 1
sferă 6105 10R m−= ⋅
rigid - -
corp 2
semispațiu elasto-plastic
2 210E GPa=
2 0,3ν =
Legea lui Swift: 1240B MPa= ,
30C = , 0,085n = Contactul a fost încărcat incremental până la un nivel al sarcinii 0,650W N= , pentru care modelul elastic hertzian prezice o rază de contact 6,053Ha mμ= și o presiune hertziană 8470Hp MPa= . Coordonatele adimensionale 1x , 2x și 3x au fost definite
prin raportare la Ha , iar tensiunile au fost adimensionalizate prin Hp . Astfel, rVMσ
reprezintă tensiunea reziduală echivalentă (în sens Von Mises) adimensională, prVMσ
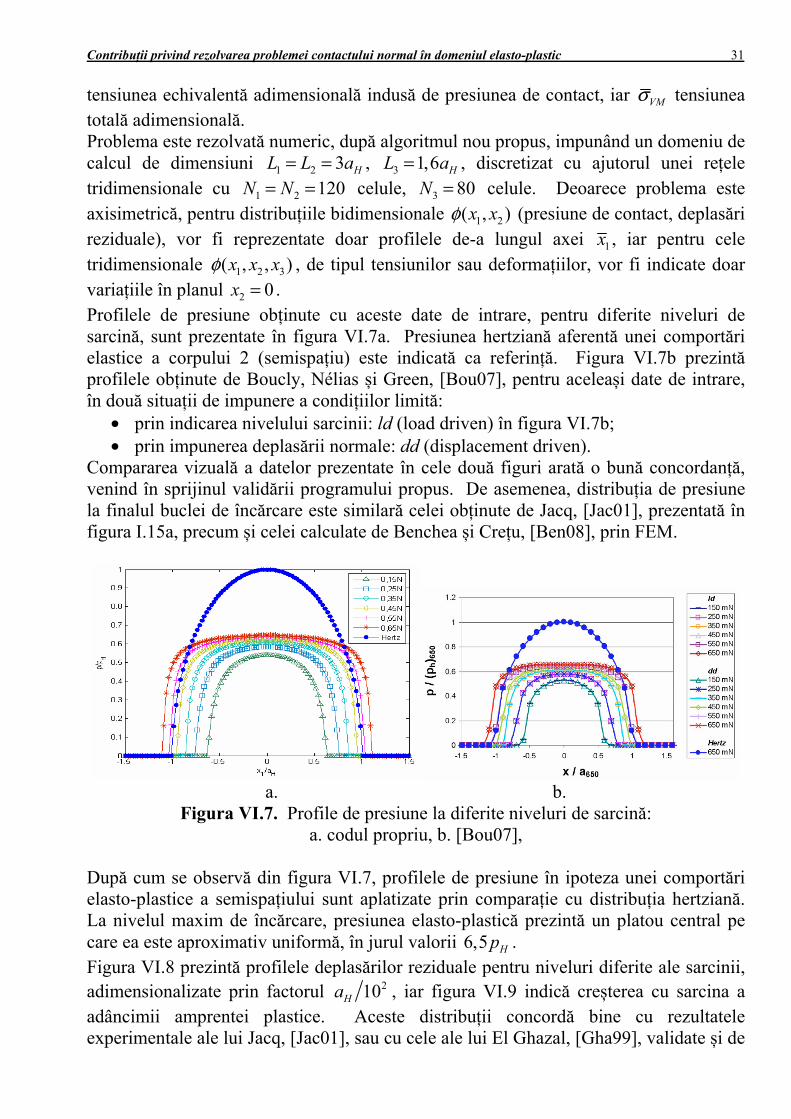
Contribuții privind rezolvarea problemei contactului normal în domeniul elasto-plastic 31 tensiunea echivalentă adimensională indusă de presiunea de contact, iar VMσ tensiunea totală adimensională. Problema este rezolvată numeric, după algoritmul nou propus, impunând un domeniu de calcul de dimensiuni 1 2 3 HL L a= = , 3 1,6 HL a= , discretizat cu ajutorul unei rețele tridimensionale cu 1 2 120N N= = celule, 3 80N = celule. Deoarece problema este axisimetrică, pentru distribuțiile bidimensionale 1 2( , )x xφ (presiune de contact, deplasări reziduale), vor fi reprezentate doar profilele de-a lungul axei 1x , iar pentru cele tridimensionale 1 2 3( , , )x x xφ , de tipul tensiunilor sau deformațiilor, vor fi indicate doar variațiile în planul 2 0x = . Profilele de presiune obținute cu aceste date de intrare, pentru diferite niveluri de sarcină, sunt prezentate în figura VI.7a. Presiunea hertziană aferentă unei comportări elastice a corpului 2 (semispațiu) este indicată ca referință. Figura VI.7b prezintă profilele obținute de Boucly, Nélias și Green, [Bou07], pentru aceleași date de intrare, în două situații de impunere a condițiilor limită:
• prin indicarea nivelului sarcinii: ld (load driven) în figura VI.7b; • prin impunerea deplasării normale: dd (displacement driven).
Compararea vizuală a datelor prezentate în cele două figuri arată o bună concordanță, venind în sprijinul validării programului propus. De asemenea, distribuția de presiune la finalul buclei de încărcare este similară celei obținute de Jacq, [Jac01], prezentată în figura I.15a, precum și celei calculate de Benchea și Crețu, [Ben08], prin FEM.
a. b.
Figura VI.7. Profile de presiune la diferite niveluri de sarcină: a. codul propriu, b. [Bou07],
După cum se observă din figura VI.7, profilele de presiune în ipoteza unei comportări elasto-plastice a semispațiului sunt aplatizate prin comparație cu distribuția hertziană. La nivelul maxim de încărcare, presiunea elasto-plastică prezintă un platou central pe care ea este aproximativ uniformă, în jurul valorii 6,5 Hp . Figura VI.8 prezintă profilele deplasărilor reziduale pentru niveluri diferite ale sarcinii, adimensionalizate prin factorul 210Ha , iar figura VI.9 indică creșterea cu sarcina a adâncimii amprentei plastice. Aceste distribuții concordă bine cu rezultatele experimentale ale lui Jacq, [Jac01], sau cu cele ale lui El Ghazal, [Gha99], validate și de
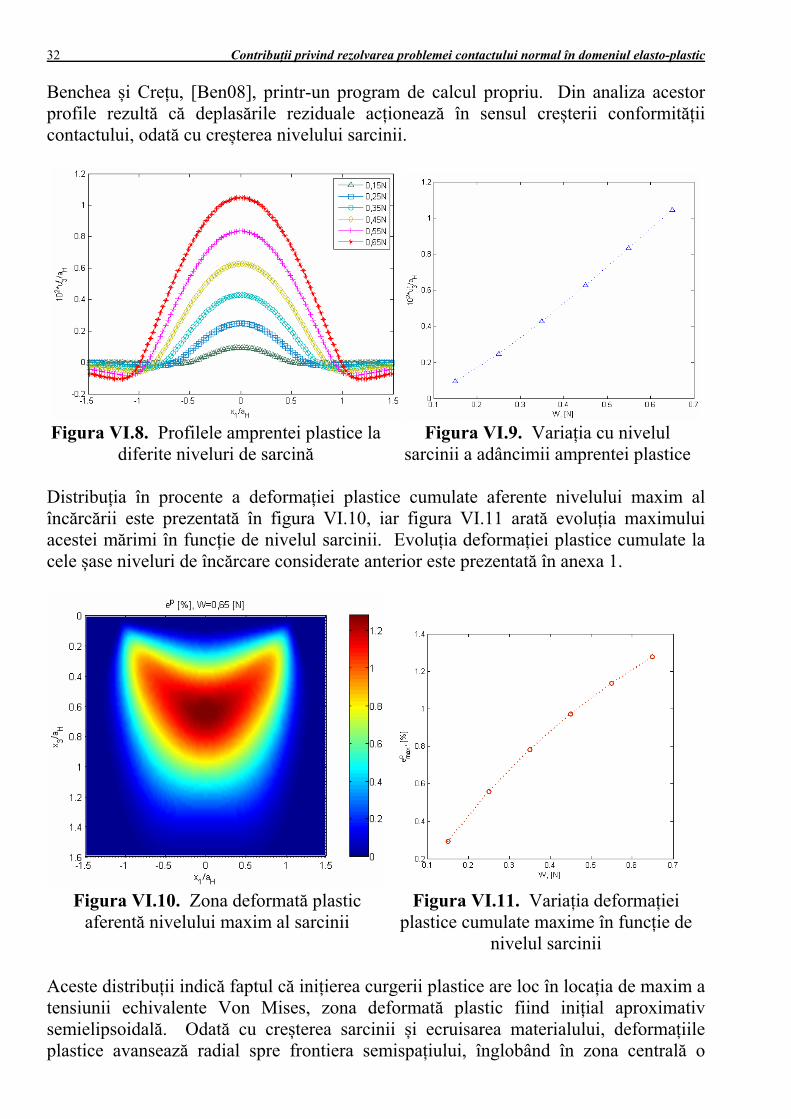
32 Contribuții privind rezolvarea problemei contactului normal în domeniul elasto-plastic Benchea și Crețu, [Ben08], printr-un program de calcul propriu. Din analiza acestor profile rezultă că deplasările reziduale acționează în sensul creșterii conformității contactului, odată cu creșterea nivelului sarcinii.
Figura VI.8. Profilele amprentei plastice la
diferite niveluri de sarcină Figura VI.9. Variația cu nivelul
sarcinii a adâncimii amprentei plastice Distribuția în procente a deformației plastice cumulate aferente nivelului maxim al încărcării este prezentată în figura VI.10, iar figura VI.11 arată evoluția maximului acestei mărimi în funcție de nivelul sarcinii. Evoluția deformației plastice cumulate la cele șase niveluri de încărcare considerate anterior este prezentată în anexa 1.
Figura VI.10. Zona deformată plastic
aferentă nivelului maxim al sarcinii Figura VI.11. Variația deformației
plastice cumulate maxime în funcție de nivelul sarcinii
Aceste distribuții indică faptul că inițierea curgerii plastice are loc în locația de maxim a tensiunii echivalente Von Mises, zona deformată plastic fiind inițial aproximativ semielipsoidală. Odată cu creșterea sarcinii și ecruisarea materialului, deformațiile plastice avansează radial spre frontiera semispațiului, înglobând în zona centrală o
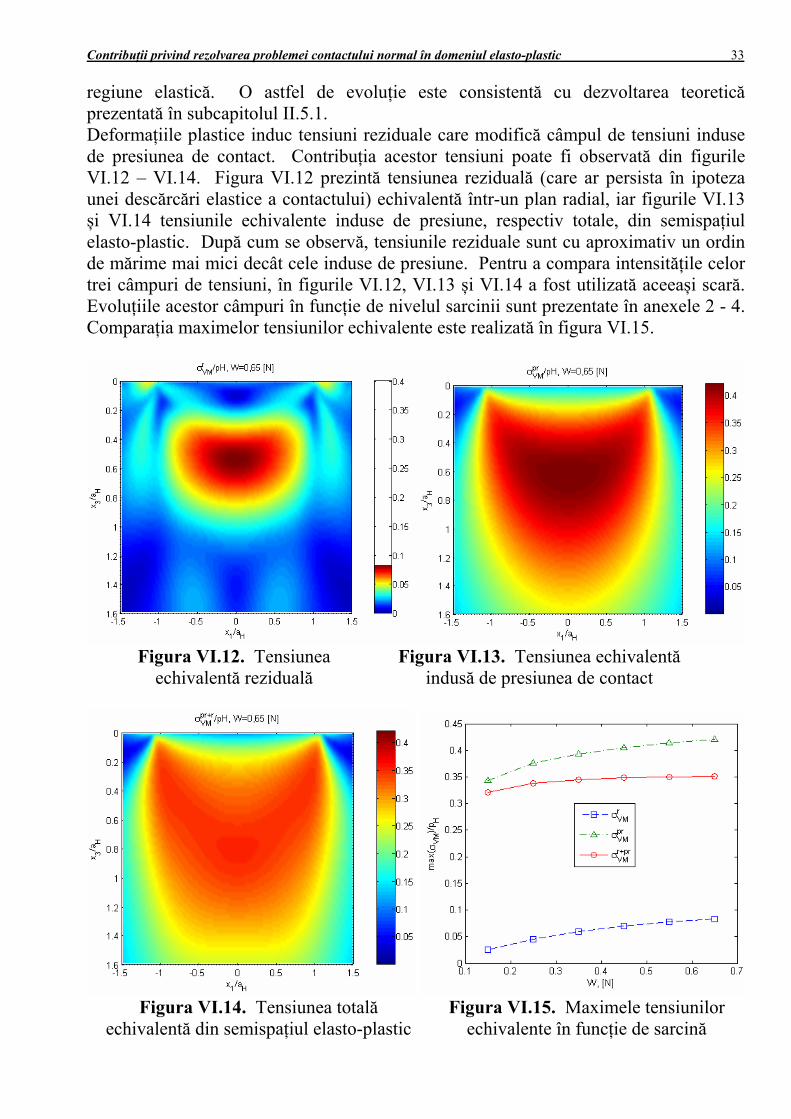
Contribuții privind rezolvarea problemei contactului normal în domeniul elasto-plastic 33 regiune elastică. O astfel de evoluție este consistentă cu dezvoltarea teoretică prezentată în subcapitolul II.5.1. Deformațiile plastice induc tensiuni reziduale care modifică câmpul de tensiuni induse de presiunea de contact. Contribuția acestor tensiuni poate fi observată din figurile VI.12 – VI.14. Figura VI.12 prezintă tensiunea reziduală (care ar persista în ipoteza unei descărcări elastice a contactului) echivalentă într-un plan radial, iar figurile VI.13 și VI.14 tensiunile echivalente induse de presiune, respectiv totale, din semispațiul elasto-plastic. După cum se observă, tensiunile reziduale sunt cu aproximativ un ordin de mărime mai mici decât cele induse de presiune. Pentru a compara intensitățile celor trei câmpuri de tensiuni, în figurile VI.12, VI.13 și VI.14 a fost utilizată aceeași scară. Evoluțiile acestor câmpuri în funcție de nivelul sarcinii sunt prezentate în anexele 2 - 4. Comparația maximelor tensiunilor echivalente este realizată în figura VI.15.
Figura VI.12. Tensiunea
echivalentă reziduală Figura VI.13. Tensiunea echivalentă
indusă de presiunea de contact
Figura VI.14. Tensiunea totală
echivalentă din semispațiul elasto-plastic Figura VI.15. Maximele tensiunilor
echivalente în funcție de sarcină
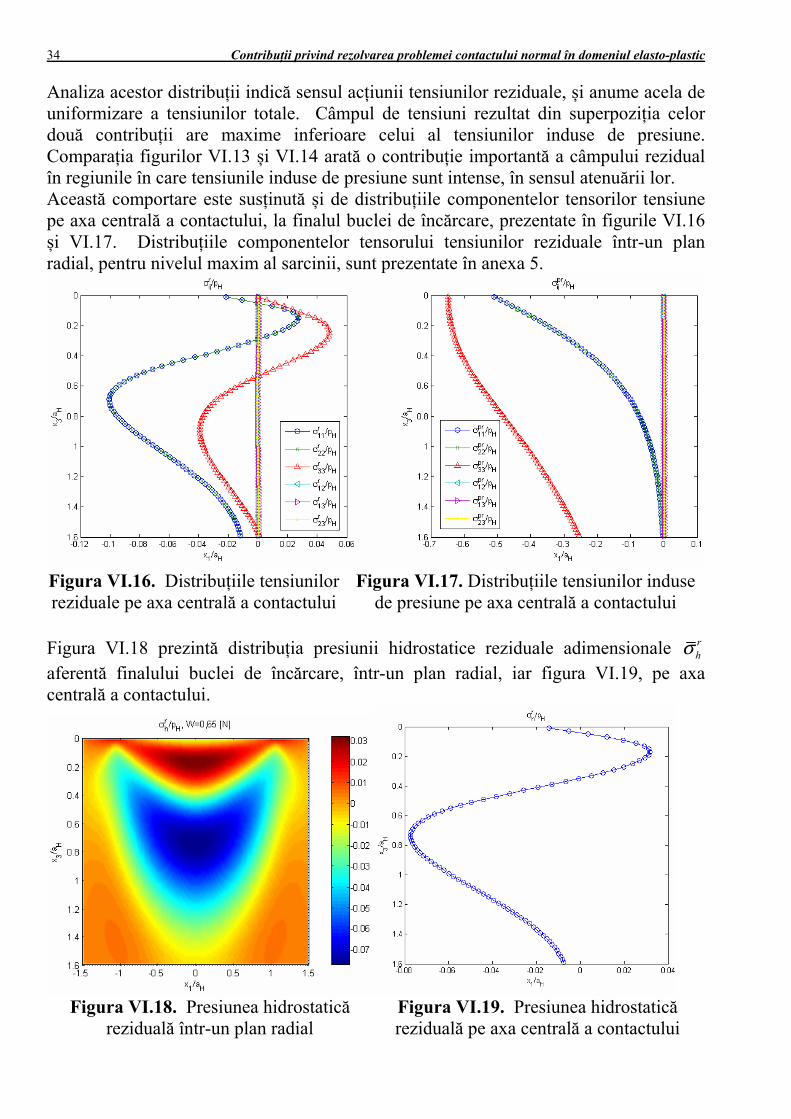
34 Contribuții privind rezolvarea problemei contactului normal în domeniul elasto-plastic Analiza acestor distribuții indică sensul acțiunii tensiunilor reziduale, și anume acela de uniformizare a tensiunilor totale. Câmpul de tensiuni rezultat din superpoziția celor două contribuții are maxime inferioare celui al tensiunilor induse de presiune. Comparația figurilor VI.13 și VI.14 arată o contribuție importantă a câmpului rezidual în regiunile în care tensiunile induse de presiune sunt intense, în sensul atenuării lor. Această comportare este susținută și de distribuțiile componentelor tensorilor tensiune pe axa centrală a contactului, la finalul buclei de încărcare, prezentate în figurile VI.16 și VI.17. Distribuțiile componentelor tensorului tensiunilor reziduale într-un plan radial, pentru nivelul maxim al sarcinii, sunt prezentate în anexa 5.
Figura VI.16. Distribuțiile tensiunilor reziduale pe axa centrală a contactului
Figura VI.17. Distribuțiile tensiunilor indusede presiune pe axa centrală a contactului
Figura VI.18 prezintă distribuția presiunii hidrostatice reziduale adimensionale r
hσ aferentă finalului buclei de încărcare, într-un plan radial, iar figura VI.19, pe axa centrală a contactului.
Figura VI.18. Presiunea hidrostatică
reziduală într-un plan radial Figura VI.19. Presiunea hidrostatică reziduală pe axa centrală a contactului
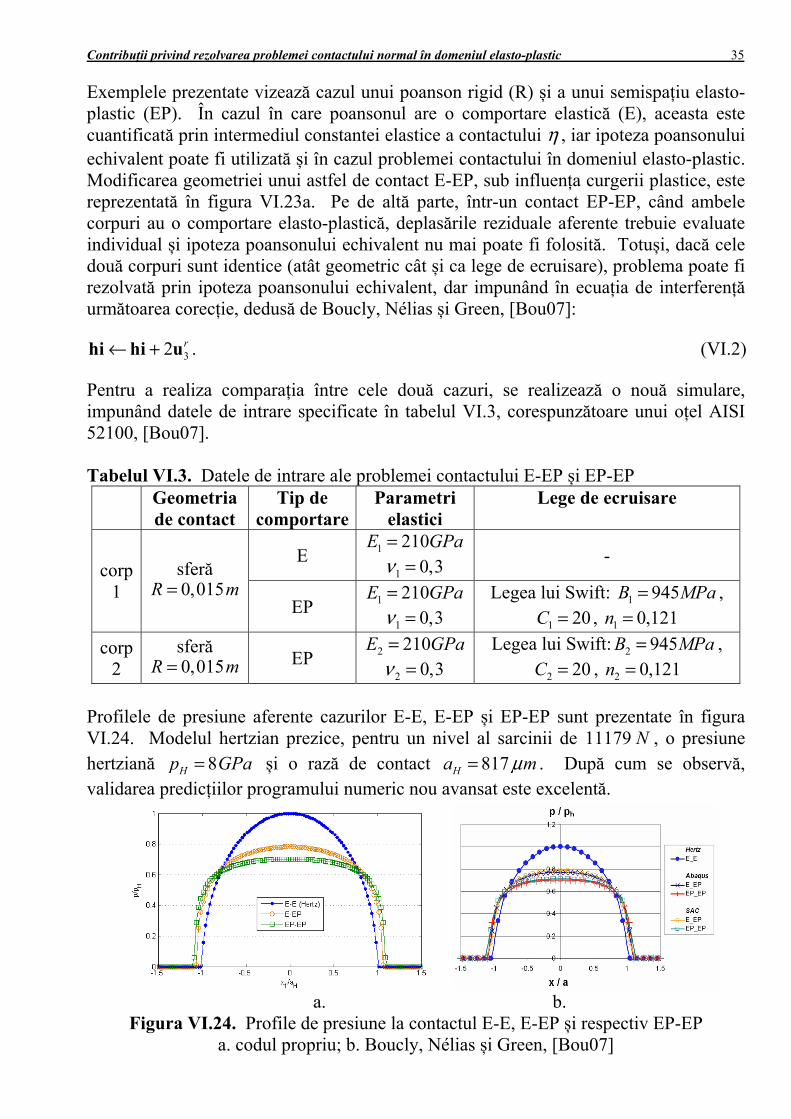
Contribuții privind rezolvarea problemei contactului normal în domeniul elasto-plastic 35 Exemplele prezentate vizează cazul unui poanson rigid (R) și a unui semispațiu elasto-plastic (EP). În cazul în care poansonul are o comportare elastică (E), aceasta este cuantificată prin intermediul constantei elastice a contactului η , iar ipoteza poansonului echivalent poate fi utilizată și în cazul problemei contactului în domeniul elasto-plastic. Modificarea geometriei unui astfel de contact E-EP, sub influența curgerii plastice, este reprezentată în figura VI.23a. Pe de altă parte, într-un contact EP-EP, când ambele corpuri au o comportare elasto-plastică, deplasările reziduale aferente trebuie evaluate individual și ipoteza poansonului echivalent nu mai poate fi folosită. Totuși, dacă cele două corpuri sunt identice (atât geometric cât și ca lege de ecruisare), problema poate fi rezolvată prin ipoteza poansonului echivalent, dar impunând în ecuația de interferență următoarea corecție, dedusă de Boucly, Nélias și Green, [Bou07]:
32 r← +hi hi u . (VI.2)
Pentru a realiza comparația între cele două cazuri, se realizează o nouă simulare, impunând datele de intrare specificate în tabelul VI.3, corespunzătoare unui oțel AISI 52100, [Bou07]. Tabelul VI.3. Datele de intrare ale problemei contactului E-EP și EP-EP
Geometria de contact
Tip de comportare
Parametri elastici
Lege de ecruisare
E 1 210E GPa=1 0,3ν =
- corp
1 sferă 0,015R m=
EP 1 210E GPa=1 0,3ν =
Legea lui Swift: 1 945B MPa= ,
1 20C = , 1 0,121n =
corp 2
sferă 0,015R m= EP 2 210E GPa=
2 0,3ν = Legea lui Swift: 2 945B MPa= ,
2 20C = , 2 0,121n =
Profilele de presiune aferente cazurilor E-E, E-EP și EP-EP sunt prezentate în figura VI.24. Modelul hertzian prezice, pentru un nivel al sarcinii de 11179 N , o presiune hertziană 8Hp GPa= și o rază de contact 817Ha mμ= . După cum se observă, validarea predicțiilor programului numeric nou avansat este excelentă.
a. b.
Figura VI.24. Profile de presiune la contactul E-E, E-EP și respectiv EP-EP a. codul propriu; b. Boucly, Nélias și Green, [Bou07]
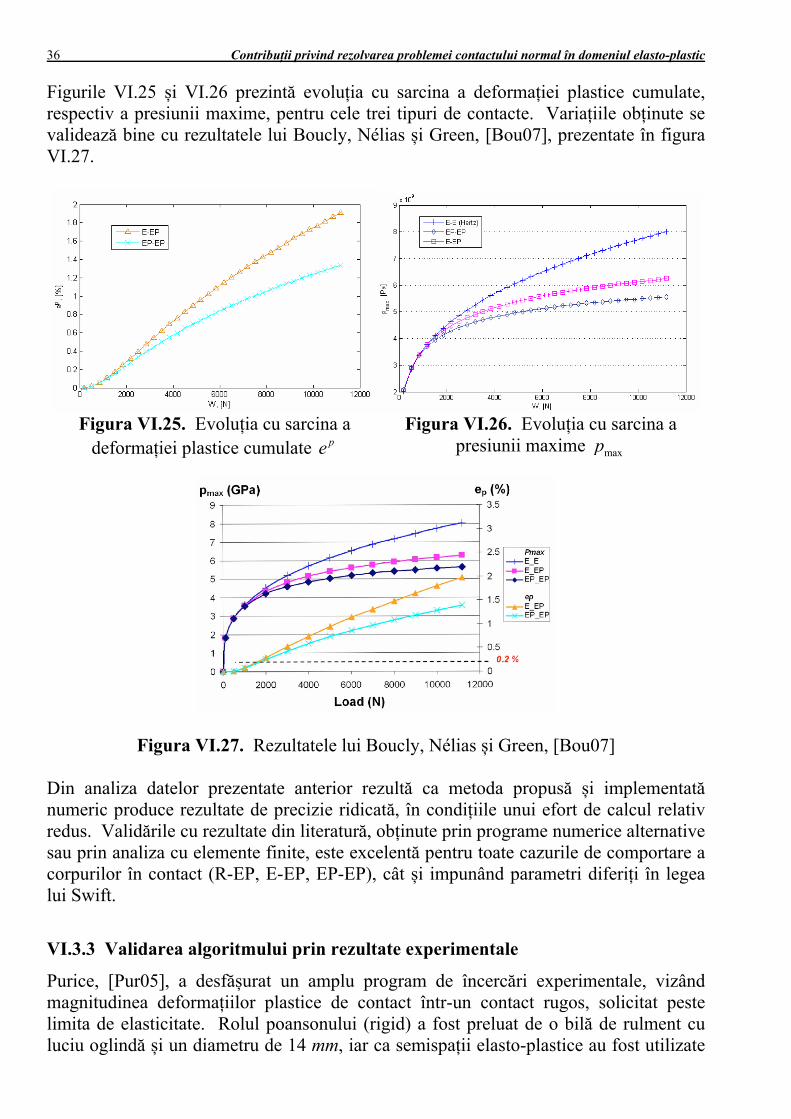
36 Contribuții privind rezolvarea problemei contactului normal în domeniul elasto-plastic Figurile VI.25 și VI.26 prezintă evoluția cu sarcina a deformației plastice cumulate, respectiv a presiunii maxime, pentru cele trei tipuri de contacte. Variațiile obținute se validează bine cu rezultatele lui Boucly, Nélias și Green, [Bou07], prezentate în figura VI.27.
Figura VI.25. Evoluția cu sarcina a
deformației plastice cumulate pe Figura VI.26. Evoluția cu sarcina a
presiunii maxime maxp
Figura VI.27. Rezultatele lui Boucly, Nélias și Green, [Bou07]
Din analiza datelor prezentate anterior rezultă ca metoda propusă și implementată numeric produce rezultate de precizie ridicată, în condițiile unui efort de calcul relativ redus. Validările cu rezultate din literatură, obținute prin programe numerice alternative sau prin analiza cu elemente finite, este excelentă pentru toate cazurile de comportare a corpurilor în contact (R-EP, E-EP, EP-EP), cât și impunând parametri diferiți în legea lui Swift.
VI.3.3 Validarea algoritmului prin rezultate experimentale
Purice, [Pur05], a desfășurat un amplu program de încercări experimentale, vizând magnitudinea deformațiilor plastice de contact într-un contact rugos, solicitat peste limita de elasticitate. Rolul poansonului (rigid) a fost preluat de o bilă de rulment cu luciu oglindă și un diametru de 14 mm, iar ca semispații elasto-plastice au fost utilizate
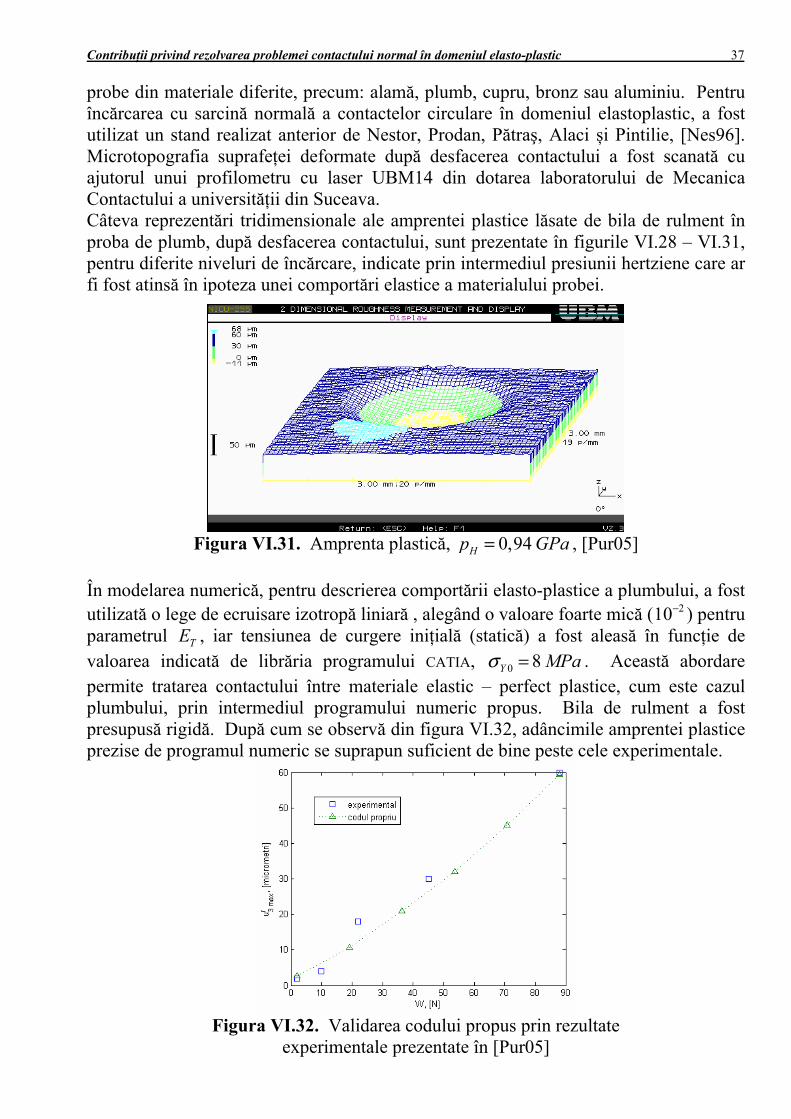
Contribuții privind rezolvarea problemei contactului normal în domeniul elasto-plastic 37 probe din materiale diferite, precum: alamă, plumb, cupru, bronz sau aluminiu. Pentru încărcarea cu sarcină normală a contactelor circulare în domeniul elastoplastic, a fost utilizat un stand realizat anterior de Nestor, Prodan, Pătraş, Alaci și Pintilie, [Nes96]. Microtopografia suprafeței deformate după desfacerea contactului a fost scanată cu ajutorul unui profilometru cu laser UBM14 din dotarea laboratorului de Mecanica Contactului a universității din Suceava. Câteva reprezentări tridimensionale ale amprentei plastice lăsate de bila de rulment în proba de plumb, după desfacerea contactului, sunt prezentate în figurile VI.28 – VI.31, pentru diferite niveluri de încărcare, indicate prin intermediul presiunii hertziene care ar fi fost atinsă în ipoteza unei comportări elastice a materialului probei.
Figura VI.31. Amprenta plastică, 0,94Hp GPa= , [Pur05]
În modelarea numerică, pentru descrierea comportării elasto-plastice a plumbului, a fost utilizată o lege de ecruisare izotropă liniară , alegând o valoare foarte mică ( 210− ) pentru parametrul TE , iar tensiunea de curgere inițială (statică) a fost aleasă în funcție de valoarea indicată de librăria programului CATIA, 0 8Y MPaσ = . Această abordare permite tratarea contactului între materiale elastic – perfect plastice, cum este cazul plumbului, prin intermediul programului numeric propus. Bila de rulment a fost presupusă rigidă. După cum se observă din figura VI.32, adâncimile amprentei plastice prezise de programul numeric se suprapun suficient de bine peste cele experimentale.
Figura VI.32. Validarea codului propus prin rezultate
experimentale prezentate în [Pur05]
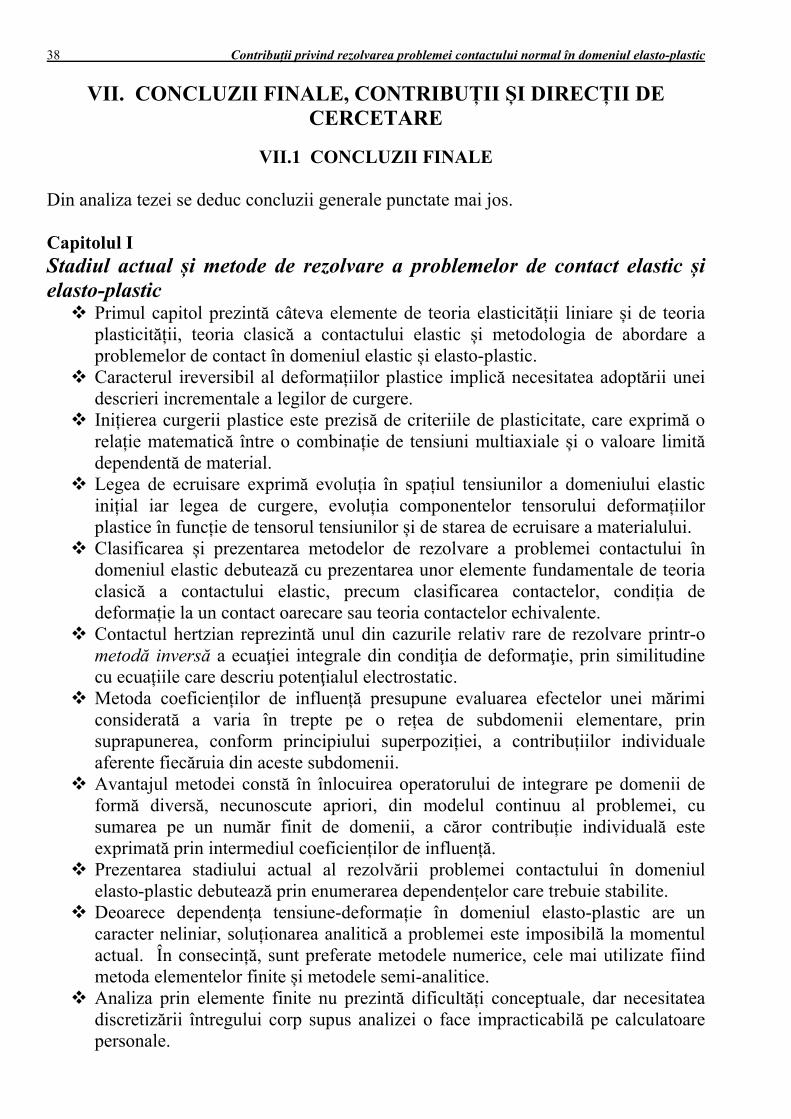
38 Contribuții privind rezolvarea problemei contactului normal în domeniul elasto-plastic
VII. CONCLUZII FINALE, CONTRIBUȚII ȘI DIRECȚII DE CERCETARE
VII.1 CONCLUZII FINALE
Din analiza tezei se deduc concluzii generale punctate mai jos. Capitolul I Stadiul actual și metode de rezolvare a problemelor de contact elastic și elasto-plastic Primul capitol prezintă câteva elemente de teoria elasticității liniare și de teoria
plasticității, teoria clasică a contactului elastic și metodologia de abordare a problemelor de contact în domeniul elastic și elasto-plastic.
Caracterul ireversibil al deformațiilor plastice implică necesitatea adoptării unei descrieri incrementale a legilor de curgere.
Inițierea curgerii plastice este prezisă de criteriile de plasticitate, care exprimă o relație matematică între o combinație de tensiuni multiaxiale și o valoare limită dependentă de material.
Legea de ecruisare exprimă evoluția în spațiul tensiunilor a domeniului elastic inițial iar legea de curgere, evoluția componentelor tensorului deformațiilor plastice în funcție de tensorul tensiunilor și de starea de ecruisare a materialului.
Clasificarea și prezentarea metodelor de rezolvare a problemei contactului în domeniul elastic debutează cu prezentarea unor elemente fundamentale de teoria clasică a contactului elastic, precum clasificarea contactelor, condiția de deformație la un contact oarecare sau teoria contactelor echivalente.
Contactul hertzian reprezintă unul din cazurile relativ rare de rezolvare printr-o metodă inversă a ecuaţiei integrale din condiţia de deformaţie, prin similitudine cu ecuațiile care descriu potenţialul electrostatic.
Metoda coeficienților de influență presupune evaluarea efectelor unei mărimi considerată a varia în trepte pe o rețea de subdomenii elementare, prin suprapunerea, conform principiului superpoziției, a contribuțiilor individuale aferente fiecăruia din aceste subdomenii.
Avantajul metodei constă în înlocuirea operatorului de integrare pe domenii de formă diversă, necunoscute apriori, din modelul continuu al problemei, cu sumarea pe un număr finit de domenii, a căror contribuție individuală este exprimată prin intermediul coeficienților de influență.
Prezentarea stadiului actual al rezolvării problemei contactului în domeniul elasto-plastic debutează prin enumerarea dependențelor care trebuie stabilite.
Deoarece dependența tensiune-deformație în domeniul elasto-plastic are un caracter neliniar, soluționarea analitică a problemei este imposibilă la momentul actual. În consecință, sunt preferate metodele numerice, cele mai utilizate fiind metoda elementelor finite și metodele semi-analitice.
Analiza prin elemente finite nu prezintă dificultăți conceptuale, dar necesitatea discretizării întregului corp supus analizei o face impracticabilă pe calculatoare personale.
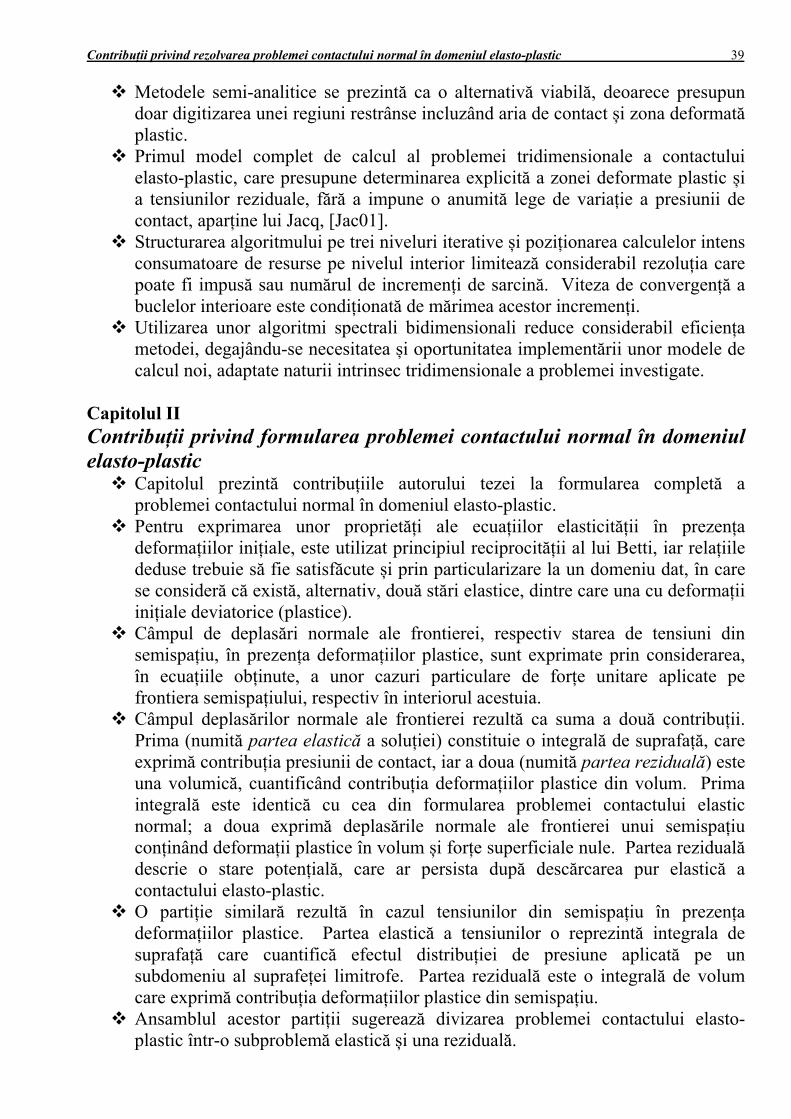
Contribuții privind rezolvarea problemei contactului normal în domeniul elasto-plastic 39 Metodele semi-analitice se prezintă ca o alternativă viabilă, deoarece presupun
doar digitizarea unei regiuni restrânse incluzând aria de contact și zona deformată plastic.
Primul model complet de calcul al problemei tridimensionale a contactului elasto-plastic, care presupune determinarea explicită a zonei deformate plastic și a tensiunilor reziduale, fără a impune o anumită lege de variație a presiunii de contact, aparține lui Jacq, [Jac01].
Structurarea algoritmului pe trei niveluri iterative și poziționarea calculelor intens consumatoare de resurse pe nivelul interior limitează considerabil rezoluția care poate fi impusă sau numărul de incremenți de sarcină. Viteza de convergență a buclelor interioare este condiționată de mărimea acestor incremenți.
Utilizarea unor algoritmi spectrali bidimensionali reduce considerabil eficiența metodei, degajându-se necesitatea și oportunitatea implementării unor modele de calcul noi, adaptate naturii intrinsec tridimensionale a problemei investigate.
Capitolul II Contribuții privind formularea problemei contactului normal în domeniul elasto-plastic Capitolul prezintă contribuțiile autorului tezei la formularea completă a
problemei contactului normal în domeniul elasto-plastic. Pentru exprimarea unor proprietăți ale ecuațiilor elasticității în prezența
deformațiilor inițiale, este utilizat principiul reciprocității al lui Betti, iar relațiile deduse trebuie să fie satisfăcute și prin particularizare la un domeniu dat, în care se consideră că există, alternativ, două stări elastice, dintre care una cu deformații inițiale deviatorice (plastice).
Câmpul de deplasări normale ale frontierei, respectiv starea de tensiuni din semispațiu, în prezența deformațiilor plastice, sunt exprimate prin considerarea, în ecuațiile obținute, a unor cazuri particulare de forțe unitare aplicate pe frontiera semispațiului, respectiv în interiorul acestuia.
Câmpul deplasărilor normale ale frontierei rezultă ca suma a două contribuții. Prima (numită partea elastică a soluției) constituie o integrală de suprafață, care exprimă contribuția presiunii de contact, iar a doua (numită partea reziduală) este una volumică, cuantificând contribuția deformațiilor plastice din volum. Prima integrală este identică cu cea din formularea problemei contactului elastic normal; a doua exprimă deplasările normale ale frontierei unui semispațiu conținând deformații plastice în volum și forțe superficiale nule. Partea reziduală descrie o stare potențială, care ar persista după descărcarea pur elastică a contactului elasto-plastic.
O partiție similară rezultă în cazul tensiunilor din semispațiu în prezența deformațiilor plastice. Partea elastică a tensiunilor o reprezintă integrala de suprafață care cuantifică efectul distribuției de presiune aplicată pe un subdomeniu al suprafeței limitrofe. Partea reziduală este o integrală de volum care exprimă contribuția deformațiilor plastice din semispațiu.
Ansamblul acestor partiții sugerează divizarea problemei contactului elasto-plastic într-o subproblemă elastică și una reziduală.
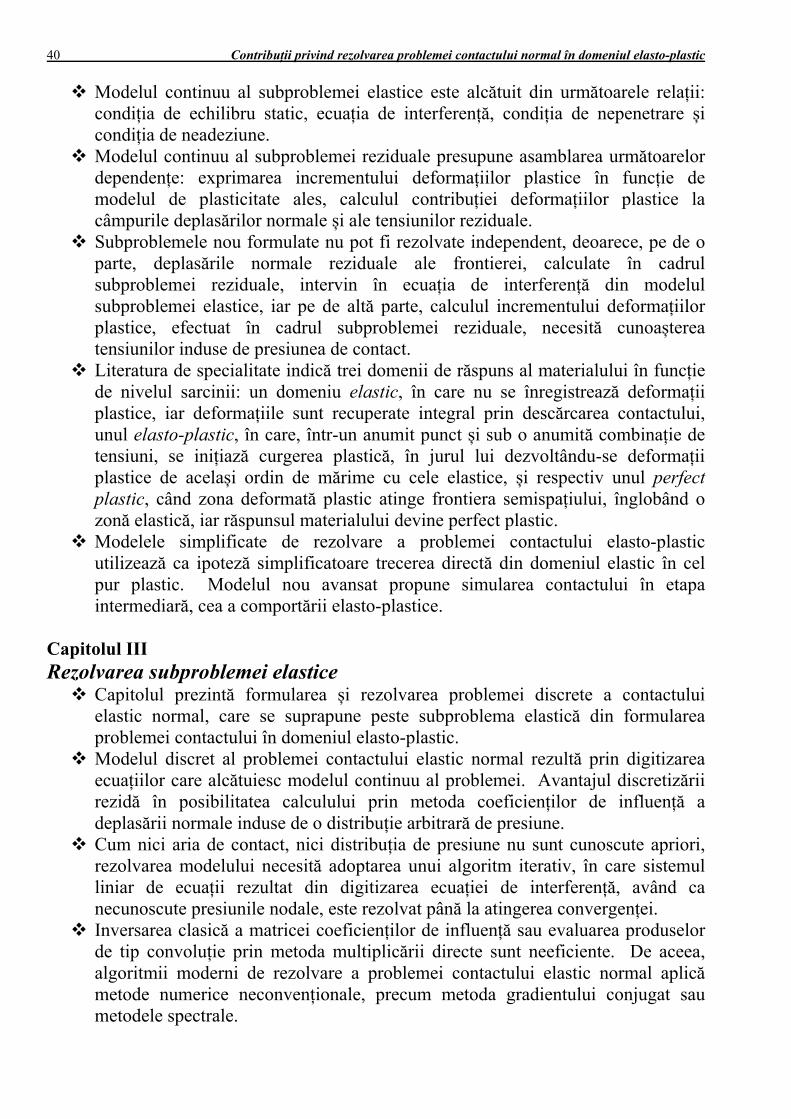
40 Contribuții privind rezolvarea problemei contactului normal în domeniul elasto-plastic Modelul continuu al subproblemei elastice este alcătuit din următoarele relații:
condiția de echilibru static, ecuația de interferență, condiția de nepenetrare și condiția de neadeziune.
Modelul continuu al subproblemei reziduale presupune asamblarea următoarelor dependențe: exprimarea incrementului deformațiilor plastice în funcție de modelul de plasticitate ales, calculul contribuției deformațiilor plastice la câmpurile deplasărilor normale și ale tensiunilor reziduale.
Subproblemele nou formulate nu pot fi rezolvate independent, deoarece, pe de o parte, deplasările normale reziduale ale frontierei, calculate în cadrul subproblemei reziduale, intervin în ecuația de interferență din modelul subproblemei elastice, iar pe de altă parte, calculul incrementului deformațiilor plastice, efectuat în cadrul subproblemei reziduale, necesită cunoașterea tensiunilor induse de presiunea de contact.
Literatura de specialitate indică trei domenii de răspuns al materialului în funcție de nivelul sarcinii: un domeniu elastic, în care nu se înregistrează deformații plastice, iar deformațiile sunt recuperate integral prin descărcarea contactului, unul elasto-plastic, în care, într-un anumit punct și sub o anumită combinație de tensiuni, se inițiază curgerea plastică, în jurul lui dezvoltându-se deformații plastice de același ordin de mărime cu cele elastice, și respectiv unul perfect plastic, când zona deformată plastic atinge frontiera semispațiului, înglobând o zonă elastică, iar răspunsul materialului devine perfect plastic.
Modelele simplificate de rezolvare a problemei contactului elasto-plastic utilizează ca ipoteză simplificatoare trecerea directă din domeniul elastic în cel pur plastic. Modelul nou avansat propune simularea contactului în etapa intermediară, cea a comportării elasto-plastice.
Capitolul III Rezolvarea subproblemei elastice Capitolul prezintă formularea și rezolvarea problemei discrete a contactului
elastic normal, care se suprapune peste subproblema elastică din formularea problemei contactului în domeniul elasto-plastic.
Modelul discret al problemei contactului elastic normal rezultă prin digitizarea ecuațiilor care alcătuiesc modelul continuu al problemei. Avantajul discretizării rezidă în posibilitatea calculului prin metoda coeficienților de influență a deplasării normale induse de o distribuție arbitrară de presiune.
Cum nici aria de contact, nici distribuția de presiune nu sunt cunoscute apriori, rezolvarea modelului necesită adoptarea unui algoritm iterativ, în care sistemul liniar de ecuații rezultat din digitizarea ecuației de interferență, având ca necunoscute presiunile nodale, este rezolvat până la atingerea convergenței.
Inversarea clasică a matricei coeficienților de influență sau evaluarea produselor de tip convoluție prin metoda multiplicării directe sunt neeficiente. De aceea, algoritmii moderni de rezolvare a problemei contactului elastic normal aplică metode numerice neconvenționale, precum metoda gradientului conjugat sau metodele spectrale.
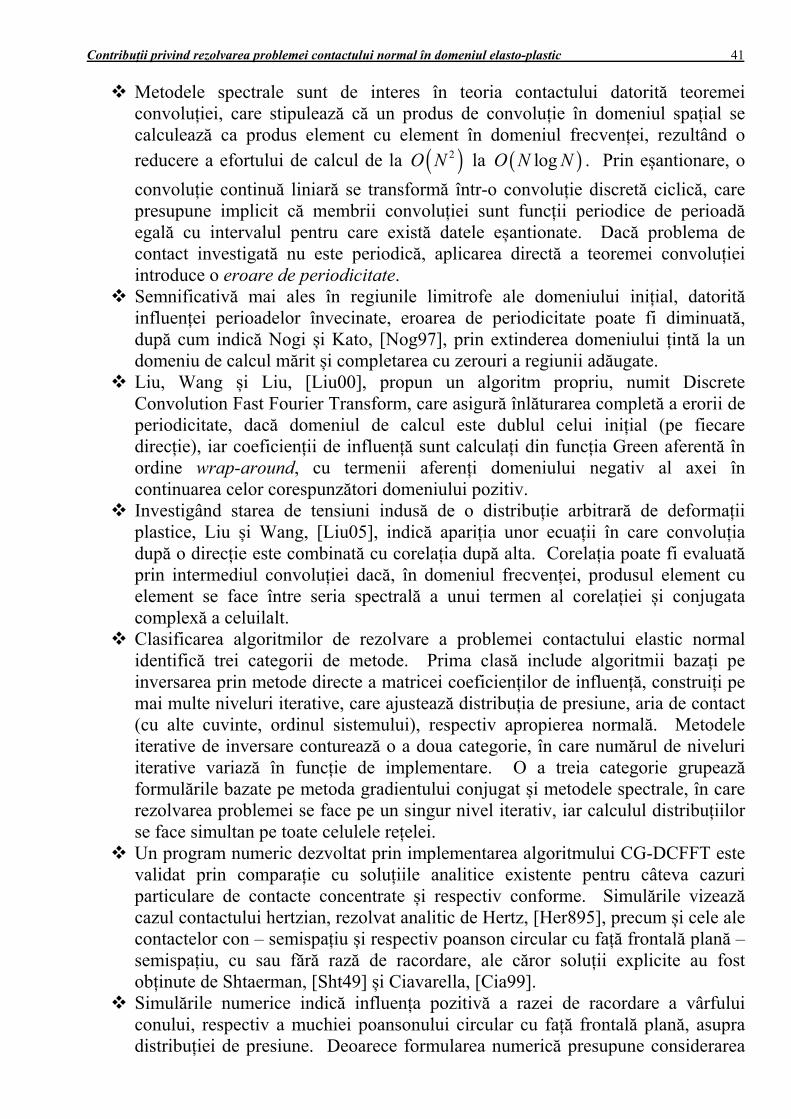
Contribuții privind rezolvarea problemei contactului normal în domeniul elasto-plastic 41 Metodele spectrale sunt de interes în teoria contactului datorită teoremei
convoluției, care stipulează că un produs de convoluție în domeniul spațial se calculează ca produs element cu element în domeniul frecvenței, rezultând o reducere a efortului de calcul de la ( )2O N la ( )logO N N . Prin eșantionare, o
convoluție continuă liniară se transformă într-o convoluție discretă ciclică, care presupune implicit că membrii convoluției sunt funcții periodice de perioadă egală cu intervalul pentru care există datele eșantionate. Dacă problema de contact investigată nu este periodică, aplicarea directă a teoremei convoluției introduce o eroare de periodicitate.
Semnificativă mai ales în regiunile limitrofe ale domeniului inițial, datorită influenței perioadelor învecinate, eroarea de periodicitate poate fi diminuată, după cum indică Nogi și Kato, [Nog97], prin extinderea domeniului țintă la un domeniu de calcul mărit și completarea cu zerouri a regiunii adăugate.
Liu, Wang și Liu, [Liu00], propun un algoritm propriu, numit Discrete Convolution Fast Fourier Transform, care asigură înlăturarea completă a erorii de periodicitate, dacă domeniul de calcul este dublul celui inițial (pe fiecare direcție), iar coeficienții de influență sunt calculați din funcția Green aferentă în ordine wrap-around, cu termenii aferenți domeniului negativ al axei în continuarea celor corespunzători domeniului pozitiv.
Investigând starea de tensiuni indusă de o distribuție arbitrară de deformații plastice, Liu și Wang, [Liu05], indică apariția unor ecuații în care convoluția după o direcție este combinată cu corelația după alta. Corelația poate fi evaluată prin intermediul convoluției dacă, în domeniul frecvenței, produsul element cu element se face între seria spectrală a unui termen al corelației și conjugata complexă a celuilalt.
Clasificarea algoritmilor de rezolvare a problemei contactului elastic normal identifică trei categorii de metode. Prima clasă include algoritmii bazați pe inversarea prin metode directe a matricei coeficienților de influență, construiți pe mai multe niveluri iterative, care ajustează distribuția de presiune, aria de contact (cu alte cuvinte, ordinul sistemului), respectiv apropierea normală. Metodele iterative de inversare conturează o a doua categorie, în care numărul de niveluri iterative variază în funcție de implementare. O a treia categorie grupează formulările bazate pe metoda gradientului conjugat și metodele spectrale, în care rezolvarea problemei se face pe un singur nivel iterativ, iar calculul distribuțiilor se face simultan pe toate celulele rețelei.
Un program numeric dezvoltat prin implementarea algoritmului CG-DCFFT este validat prin comparație cu soluțiile analitice existente pentru câteva cazuri particulare de contacte concentrate și respectiv conforme. Simulările vizează cazul contactului hertzian, rezolvat analitic de Hertz, [Her895], precum și cele ale contactelor con – semispațiu și respectiv poanson circular cu față frontală plană – semispațiu, cu sau fără rază de racordare, ale căror soluții explicite au fost obținute de Shtaerman, [Sht49] și Ciavarella, [Cia99].
Simulările numerice indică influența pozitivă a razei de racordare a vârfului conului, respectiv a muchiei poansonului circular cu față frontală plană, asupra distribuției de presiune. Deoarece formularea numerică presupune considerarea
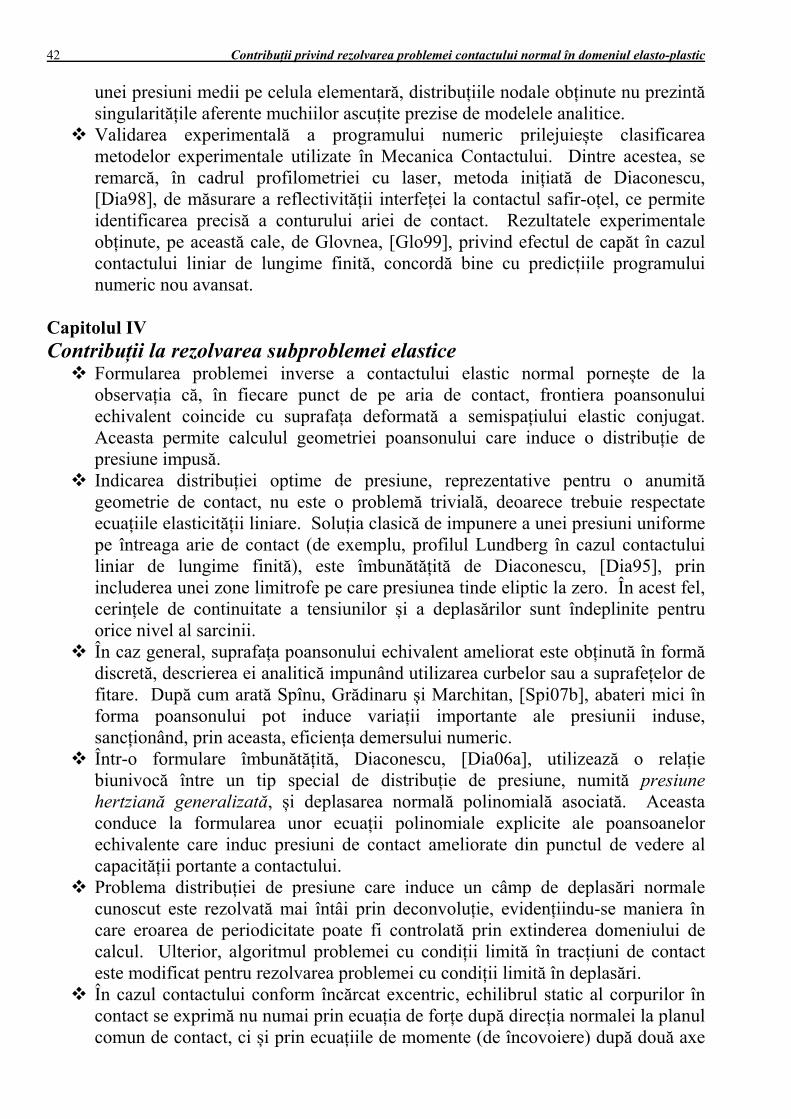
42 Contribuții privind rezolvarea problemei contactului normal în domeniul elasto-plastic
unei presiuni medii pe celula elementară, distribuțiile nodale obținute nu prezintă singularitățile aferente muchiilor ascuțite prezise de modelele analitice.
Validarea experimentală a programului numeric prilejuiește clasificarea metodelor experimentale utilizate în Mecanica Contactului. Dintre acestea, se remarcă, în cadrul profilometriei cu laser, metoda inițiată de Diaconescu, [Dia98], de măsurare a reflectivității interfeței la contactul safir-oțel, ce permite identificarea precisă a conturului ariei de contact. Rezultatele experimentale obținute, pe această cale, de Glovnea, [Glo99], privind efectul de capăt în cazul contactului liniar de lungime finită, concordă bine cu predicțiile programului numeric nou avansat.
Capitolul IV Contribuții la rezolvarea subproblemei elastice Formularea problemei inverse a contactului elastic normal pornește de la
observația că, în fiecare punct de pe aria de contact, frontiera poansonului echivalent coincide cu suprafața deformată a semispațiului elastic conjugat. Aceasta permite calculul geometriei poansonului care induce o distribuție de presiune impusă.
Indicarea distribuției optime de presiune, reprezentative pentru o anumită geometrie de contact, nu este o problemă trivială, deoarece trebuie respectate ecuațiile elasticității liniare. Soluția clasică de impunere a unei presiuni uniforme pe întreaga arie de contact (de exemplu, profilul Lundberg în cazul contactului liniar de lungime finită), este îmbunătățită de Diaconescu, [Dia95], prin includerea unei zone limitrofe pe care presiunea tinde eliptic la zero. În acest fel, cerințele de continuitate a tensiunilor și a deplasărilor sunt îndeplinite pentru orice nivel al sarcinii.
În caz general, suprafața poansonului echivalent ameliorat este obținută în formă discretă, descrierea ei analitică impunând utilizarea curbelor sau a suprafețelor de fitare. După cum arată Spînu, Grădinaru și Marchitan, [Spi07b], abateri mici în forma poansonului pot induce variații importante ale presiunii induse, sancționând, prin aceasta, eficiența demersului numeric.
Într-o formulare îmbunătățită, Diaconescu, [Dia06a], utilizează o relație biunivocă între un tip special de distribuție de presiune, numită presiune hertziană generalizată, și deplasarea normală polinomială asociată. Aceasta conduce la formularea unor ecuații polinomiale explicite ale poansoanelor echivalente care induc presiuni de contact ameliorate din punctul de vedere al capacității portante a contactului.
Problema distribuției de presiune care induce un câmp de deplasări normale cunoscut este rezolvată mai întâi prin deconvoluție, evidențiindu-se maniera în care eroarea de periodicitate poate fi controlată prin extinderea domeniului de calcul. Ulterior, algoritmul problemei cu condiții limită în tracțiuni de contact este modificat pentru rezolvarea problemei cu condiții limită în deplasări.
În cazul contactului conform încărcat excentric, echilibrul static al corpurilor în contact se exprimă nu numai prin ecuația de forțe după direcția normalei la planul comun de contact, ci și prin ecuațiile de momente (de încovoiere) după două axe
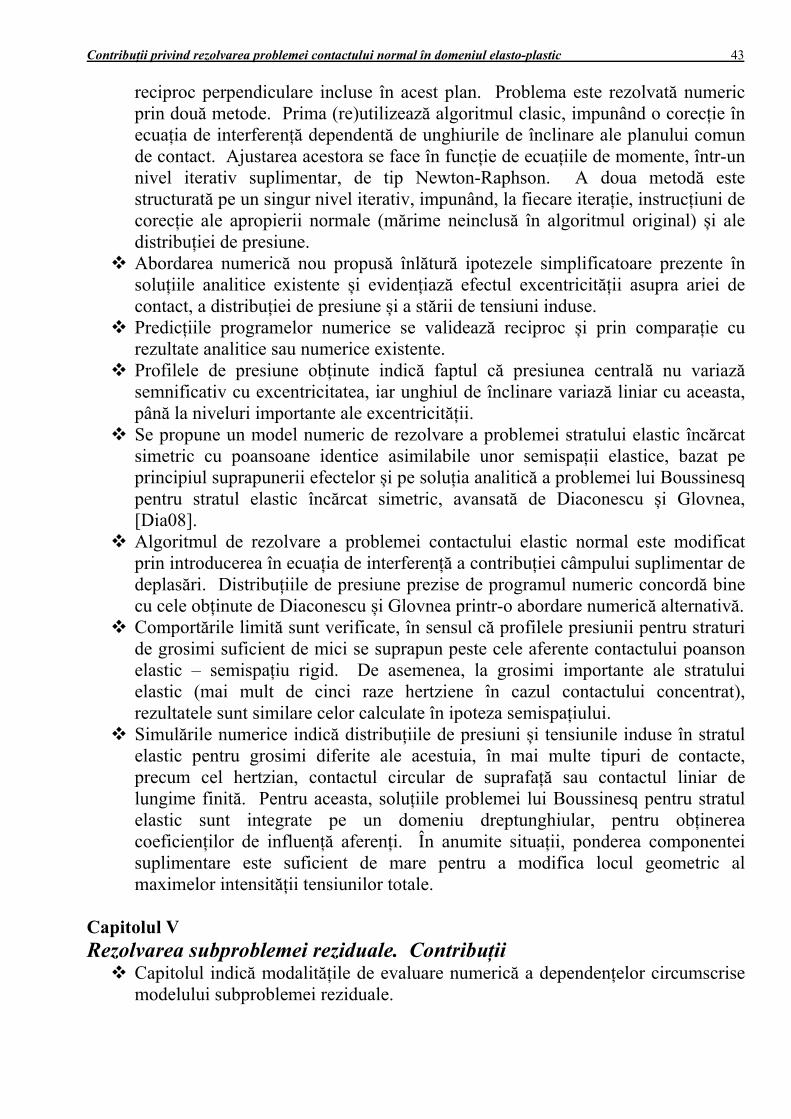
Contribuții privind rezolvarea problemei contactului normal în domeniul elasto-plastic 43
reciproc perpendiculare incluse în acest plan. Problema este rezolvată numeric prin două metode. Prima (re)utilizează algoritmul clasic, impunând o corecție în ecuația de interferență dependentă de unghiurile de înclinare ale planului comun de contact. Ajustarea acestora se face în funcție de ecuațiile de momente, într-un nivel iterativ suplimentar, de tip Newton-Raphson. A doua metodă este structurată pe un singur nivel iterativ, impunând, la fiecare iterație, instrucțiuni de corecție ale apropierii normale (mărime neinclusă în algoritmul original) și ale distribuției de presiune.
Abordarea numerică nou propusă înlătură ipotezele simplificatoare prezente în soluțiile analitice existente și evidențiază efectul excentricității asupra ariei de contact, a distribuției de presiune și a stării de tensiuni induse.
Predicțiile programelor numerice se validează reciproc și prin comparație cu rezultate analitice sau numerice existente.
Profilele de presiune obținute indică faptul că presiunea centrală nu variază semnificativ cu excentricitatea, iar unghiul de înclinare variază liniar cu aceasta, până la niveluri importante ale excentricității.
Se propune un model numeric de rezolvare a problemei stratului elastic încărcat simetric cu poansoane identice asimilabile unor semispații elastice, bazat pe principiul suprapunerii efectelor și pe soluția analitică a problemei lui Boussinesq pentru stratul elastic încărcat simetric, avansată de Diaconescu și Glovnea, [Dia08].
Algoritmul de rezolvare a problemei contactului elastic normal este modificat prin introducerea în ecuația de interferență a contribuției câmpului suplimentar de deplasări. Distribuțiile de presiune prezise de programul numeric concordă bine cu cele obținute de Diaconescu și Glovnea printr-o abordare numerică alternativă.
Comportările limită sunt verificate, în sensul că profilele presiunii pentru straturi de grosimi suficient de mici se suprapun peste cele aferente contactului poanson elastic – semispațiu rigid. De asemenea, la grosimi importante ale stratului elastic (mai mult de cinci raze hertziene în cazul contactului concentrat), rezultatele sunt similare celor calculate în ipoteza semispațiului.
Simulările numerice indică distribuțiile de presiuni și tensiunile induse în stratul elastic pentru grosimi diferite ale acestuia, în mai multe tipuri de contacte, precum cel hertzian, contactul circular de suprafață sau contactul liniar de lungime finită. Pentru aceasta, soluțiile problemei lui Boussinesq pentru stratul elastic sunt integrate pe un domeniu dreptunghiular, pentru obținerea coeficienților de influență aferenți. În anumite situații, ponderea componentei suplimentare este suficient de mare pentru a modifica locul geometric al maximelor intensității tensiunilor totale.
Capitolul V Rezolvarea subproblemei reziduale. Contribuții Capitolul indică modalitățile de evaluare numerică a dependențelor circumscrise
modelului subproblemei reziduale.
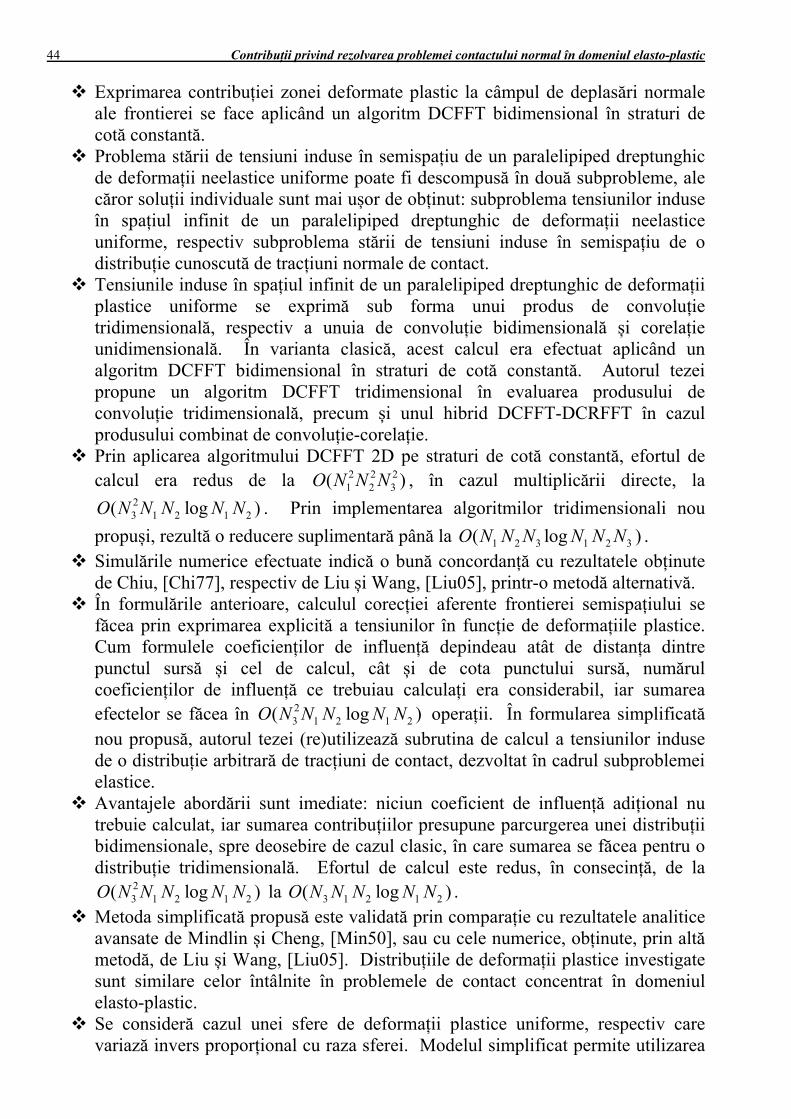
44 Contribuții privind rezolvarea problemei contactului normal în domeniul elasto-plastic Exprimarea contribuției zonei deformate plastic la câmpul de deplasări normale
ale frontierei se face aplicând un algoritm DCFFT bidimensional în straturi de cotă constantă.
Problema stării de tensiuni induse în semispațiu de un paralelipiped dreptunghic de deformații neelastice uniforme poate fi descompusă în două subprobleme, ale căror soluții individuale sunt mai ușor de obținut: subproblema tensiunilor induse în spațiul infinit de un paralelipiped dreptunghic de deformații neelastice uniforme, respectiv subproblema stării de tensiuni induse în semispațiu de o distribuție cunoscută de tracțiuni normale de contact.
Tensiunile induse în spațiul infinit de un paralelipiped dreptunghic de deformații plastice uniforme se exprimă sub forma unui produs de convoluție tridimensională, respectiv a unuia de convoluție bidimensională și corelație unidimensională. În varianta clasică, acest calcul era efectuat aplicând un algoritm DCFFT bidimensional în straturi de cotă constantă. Autorul tezei propune un algoritm DCFFT tridimensional în evaluarea produsului de convoluție tridimensională, precum și unul hibrid DCFFT-DCRFFT în cazul produsului combinat de convoluție-corelație.
Prin aplicarea algoritmului DCFFT 2D pe straturi de cotă constantă, efortul de calcul era redus de la 2 2 2
1 2 3( )O N N N , în cazul multiplicării directe, la 23 1 2 1 2( log )O N N N N N . Prin implementarea algoritmilor tridimensionali nou
propuși, rezultă o reducere suplimentară până la 1 2 3 1 2 3( log )O N N N N N N . Simulările numerice efectuate indică o bună concordanță cu rezultatele obținute
de Chiu, [Chi77], respectiv de Liu și Wang, [Liu05], printr-o metodă alternativă. În formulările anterioare, calculul corecției aferente frontierei semispațiului se
făcea prin exprimarea explicită a tensiunilor în funcție de deformațiile plastice. Cum formulele coeficienților de influență depindeau atât de distanța dintre punctul sursă și cel de calcul, cât și de cota punctului sursă, numărul coeficienților de influență ce trebuiau calculați era considerabil, iar sumarea efectelor se făcea în 2
3 1 2 1 2( log )O N N N N N operații. În formularea simplificată nou propusă, autorul tezei (re)utilizează subrutina de calcul a tensiunilor induse de o distribuție arbitrară de tracțiuni de contact, dezvoltat în cadrul subproblemei elastice.
Avantajele abordării sunt imediate: niciun coeficient de influență adițional nu trebuie calculat, iar sumarea contribuțiilor presupune parcurgerea unei distribuții bidimensionale, spre deosebire de cazul clasic, în care sumarea se făcea pentru o distribuție tridimensională. Efortul de calcul este redus, în consecință, de la
23 1 2 1 2( log )O N N N N N la 3 1 2 1 2( log )O N N N N N .
Metoda simplificată propusă este validată prin comparație cu rezultatele analitice avansate de Mindlin și Cheng, [Min50], sau cu cele numerice, obținute, prin altă metodă, de Liu și Wang, [Liu05]. Distribuțiile de deformații plastice investigate sunt similare celor întâlnite în problemele de contact concentrat în domeniul elasto-plastic.
Se consideră cazul unei sfere de deformații plastice uniforme, respectiv care variază invers proporțional cu raza sferei. Modelul simplificat permite utilizarea
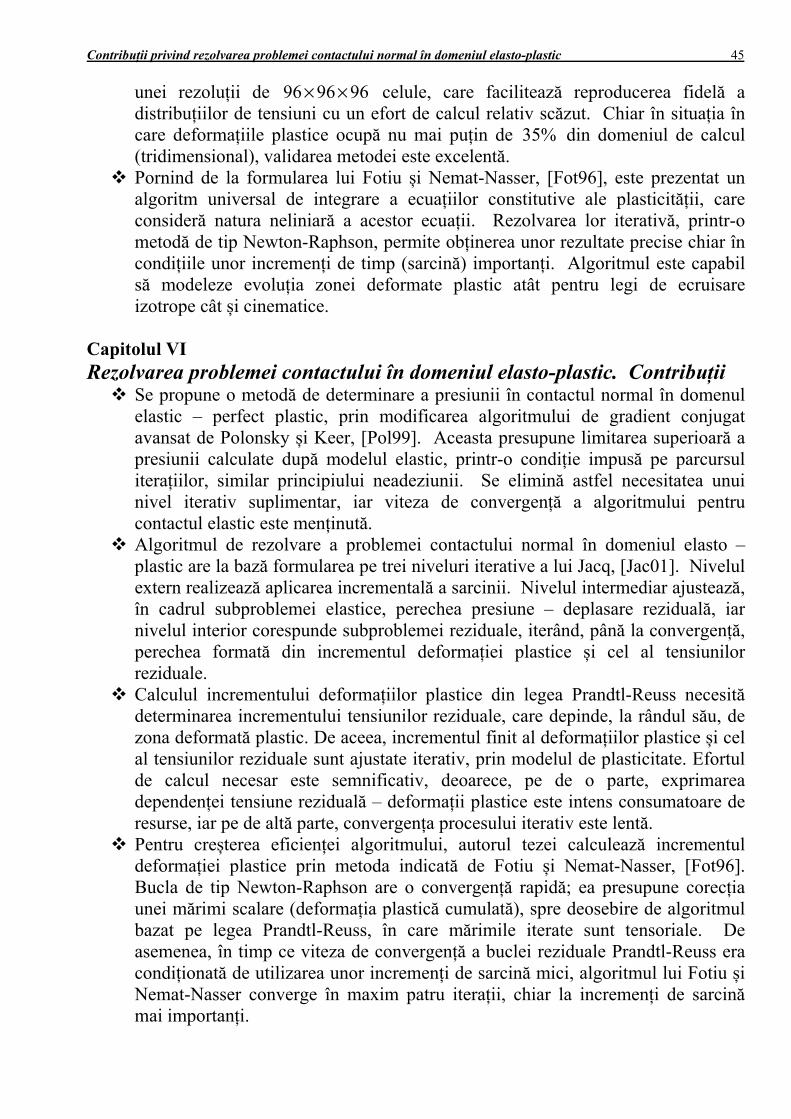
Contribuții privind rezolvarea problemei contactului normal în domeniul elasto-plastic 45
unei rezoluții de 96 96 96× × celule, care facilitează reproducerea fidelă a distribuțiilor de tensiuni cu un efort de calcul relativ scăzut. Chiar în situația în care deformațiile plastice ocupă nu mai puțin de 35% din domeniul de calcul (tridimensional), validarea metodei este excelentă.
Pornind de la formularea lui Fotiu și Nemat-Nasser, [Fot96], este prezentat un algoritm universal de integrare a ecuațiilor constitutive ale plasticității, care consideră natura neliniară a acestor ecuații. Rezolvarea lor iterativă, printr-o metodă de tip Newton-Raphson, permite obținerea unor rezultate precise chiar în condițiile unor incremenți de timp (sarcină) importanți. Algoritmul este capabil să modeleze evoluția zonei deformate plastic atât pentru legi de ecruisare izotrope cât și cinematice.
Capitolul VI Rezolvarea problemei contactului în domeniul elasto-plastic. Contribuții Se propune o metodă de determinare a presiunii în contactul normal în domenul
elastic – perfect plastic, prin modificarea algoritmului de gradient conjugat avansat de Polonsky și Keer, [Pol99]. Aceasta presupune limitarea superioară a presiunii calculate după modelul elastic, printr-o condiție impusă pe parcursul iterațiilor, similar principiului neadeziunii. Se elimină astfel necesitatea unui nivel iterativ suplimentar, iar viteza de convergență a algoritmului pentru contactul elastic este menținută.
Algoritmul de rezolvare a problemei contactului normal în domeniul elasto – plastic are la bază formularea pe trei niveluri iterative a lui Jacq, [Jac01]. Nivelul extern realizează aplicarea incrementală a sarcinii. Nivelul intermediar ajustează, în cadrul subproblemei elastice, perechea presiune – deplasare reziduală, iar nivelul interior corespunde subproblemei reziduale, iterând, până la convergență, perechea formată din incrementul deformației plastice și cel al tensiunilor reziduale.
Calculul incrementului deformațiilor plastice din legea Prandtl-Reuss necesită determinarea incrementului tensiunilor reziduale, care depinde, la rândul său, de zona deformată plastic. De aceea, incrementul finit al deformațiilor plastice și cel al tensiunilor reziduale sunt ajustate iterativ, prin modelul de plasticitate. Efortul de calcul necesar este semnificativ, deoarece, pe de o parte, exprimarea dependenței tensiune reziduală – deformații plastice este intens consumatoare de resurse, iar pe de altă parte, convergența procesului iterativ este lentă.
Pentru creșterea eficienței algoritmului, autorul tezei calculează incrementul deformației plastice prin metoda indicată de Fotiu și Nemat-Nasser, [Fot96]. Bucla de tip Newton-Raphson are o convergență rapidă; ea presupune corecția unei mărimi scalare (deformația plastică cumulată), spre deosebire de algoritmul bazat pe legea Prandtl-Reuss, în care mărimile iterate sunt tensoriale. De asemenea, în timp ce viteza de convergență a buclei reziduale Prandtl-Reuss era condiționată de utilizarea unor incremenți de sarcină mici, algoritmul lui Fotiu și Nemat-Nasser converge în maxim patru iterații, chiar la incremenți de sarcină mai importanți.
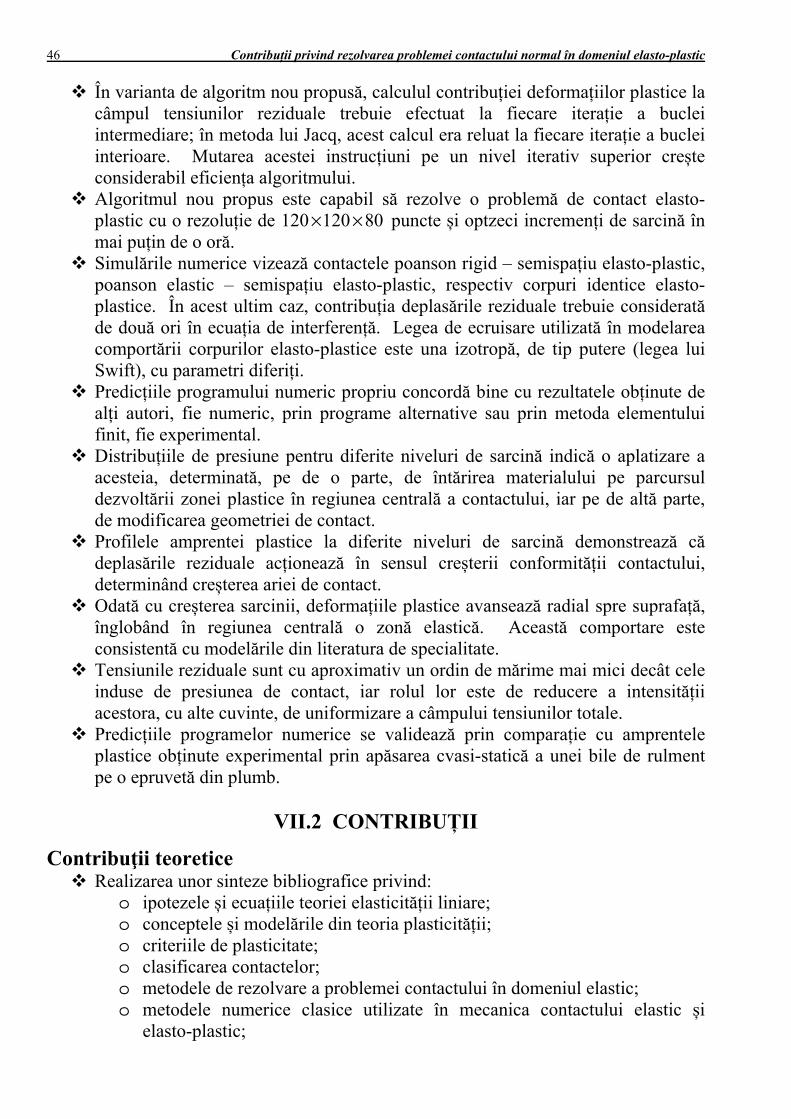
46 Contribuții privind rezolvarea problemei contactului normal în domeniul elasto-plastic În varianta de algoritm nou propusă, calculul contribuției deformațiilor plastice la
câmpul tensiunilor reziduale trebuie efectuat la fiecare iterație a buclei intermediare; în metoda lui Jacq, acest calcul era reluat la fiecare iterație a buclei interioare. Mutarea acestei instrucțiuni pe un nivel iterativ superior crește considerabil eficiența algoritmului.
Algoritmul nou propus este capabil să rezolve o problemă de contact elasto-plastic cu o rezoluție de 120 120 80× × puncte și optzeci incremenți de sarcină în mai puțin de o oră.
Simulările numerice vizează contactele poanson rigid – semispațiu elasto-plastic, poanson elastic – semispațiu elasto-plastic, respectiv corpuri identice elasto-plastice. În acest ultim caz, contribuția deplasările reziduale trebuie considerată de două ori în ecuația de interferență. Legea de ecruisare utilizată în modelarea comportării corpurilor elasto-plastice este una izotropă, de tip putere (legea lui Swift), cu parametri diferiți.
Predicțiile programului numeric propriu concordă bine cu rezultatele obținute de alți autori, fie numeric, prin programe alternative sau prin metoda elementului finit, fie experimental.
Distribuțiile de presiune pentru diferite niveluri de sarcină indică o aplatizare a acesteia, determinată, pe de o parte, de întărirea materialului pe parcursul dezvoltării zonei plastice în regiunea centrală a contactului, iar pe de altă parte, de modificarea geometriei de contact.
Profilele amprentei plastice la diferite niveluri de sarcină demonstrează că deplasările reziduale acționează în sensul creșterii conformității contactului, determinând creșterea ariei de contact.
Odată cu creșterea sarcinii, deformațiile plastice avansează radial spre suprafață, înglobând în regiunea centrală o zonă elastică. Această comportare este consistentă cu modelările din literatura de specialitate.
Tensiunile reziduale sunt cu aproximativ un ordin de mărime mai mici decât cele induse de presiunea de contact, iar rolul lor este de reducere a intensității acestora, cu alte cuvinte, de uniformizare a câmpului tensiunilor totale.
Predicțiile programelor numerice se validează prin comparație cu amprentele plastice obținute experimental prin apăsarea cvasi-statică a unei bile de rulment pe o epruvetă din plumb.
VII.2 CONTRIBUȚII
Contribuţii teoretice Realizarea unor sinteze bibliografice privind:
o ipotezele și ecuațiile teoriei elasticității liniare; o conceptele și modelările din teoria plasticității; o criteriile de plasticitate; o clasificarea contactelor; o metodele de rezolvare a problemei contactului în domeniul elastic; o metodele numerice clasice utilizate în mecanica contactului elastic și
elasto-plastic;
Contribuții privind rezolvarea problemei contactului normal în domeniul elasto-plastic 47
o metodele experimentale utilizate în mecanica contactului; o metodele de tip gradient de rezolvare a sistemelor liniare de mari
dimensiuni; o metodele spectrale utilizate în accelerarea calculelor din modelele discrete
ale problemelor de contact; o metodele de ameliorare a suprafeței active a poansoanelor echivalente în
contactele în domeniul elastic; o metodele de determinare a stării de tensiuni reziduale induse de o
distribuție arbitrară de deformații neelastice și respectiv plastice. Formularea unui model continuu al problemei contactului în domeniul elasto-
plastic. Divizarea acestui model în două subprobleme mai simple, dintre care una
coincide cu problema contactului elastic normal cu o geometrie inițială modificată.
Formularea modelelor continue ale celor două subprobleme. Formularea și rezolvarea modelelor discrete (numerice) asociate. Formularea și rezolvarea modelului discret al problemei contactului elastic
normal încărcat excentric. Formularea și rezolvarea modelului discret al problemei stratului elastic încărcat
simetric. Formularea și rezolvarea modelului discret al problemei contactului normal cu
condiții limită exprimate în deplasări. Indicarea formulelor coeficienților de influență care permit integrarea numerică a
ecuațiilor care apar. În multe cazuri, acești coeficienți sunt calculați în premieră, iar în altele, sunt propuse formule alternative celor existente în literatură.
Formularea unei metode de evaluare a corelației prin intermediul teoremei convoluției.
Formularea unui algoritm hibrid convoluție - corelație, bazat pe tehnica DCFFT. Formularea unui model simplificat, adaptat abordării numerice, de calcul al
tensiunilor reziduale induse de o stare arbitrară de deformații plastice. Formularea unui algoritm simplificat de rezolvare a problemei contactului în
domeniul elastic – perfect plastic. Implementarea algoritmului universal de integrare a ecuațiilor plasticității propus
de Fotiu și Nemat-Nasser în modelul problemei contactului în domeniul elasto-plastic.
Dezvoltarea unui algoritm de rezolvare numerică a problemei contactului în domeniul elasto - plastic.
Contribuţii la modelarea numerică Realizarea unui program de rezolvare a problemei contactului elastic normal cu
condiții limită în tracțiuni, prin implementarea algoritmului propus de Polonsky și Keer, [Pol99]. Acest algoritm presupune că sarcina transmisă prin contact este aplicată centric și că ambele corpuri pot fi asimilate prin semispații, putându-se aplica, în consecință, principiul suprapunerii efectelor la soluția problemei lui Boussinesq.
48 Contribuții privind rezolvarea problemei contactului normal în domeniul elasto-plastic Implementarea unui algoritm de tip DCFFT pentru calculul rapid al produselor de
tip convoluție, care îl înlocuiește pe cel sugerat de Polonsky și Keer, [Pol99], de tip MLMS. Aceasta se traduce într-o viteză de calcul sporită și într-o precizie ridicată, datorită înlăturării complete a erorii de periodicitate specifice metodelor spectrale.
Evidențierea unei metode de calcul a apropierii normale între corpurile în contact, mărime neinclusă în modelul original.
Indicarea, prin simulări numerice, a relației dintre eroarea de discretizare, inerentă modelelor numerice, și precizia impusă subrutinelor iterative. Prin aceasta se asigură atingerea celei mai bune precizii a soluției numerice sub restricția unei rezoluții impuse.
Evidențierea efectului razei de racordare asupra presiunii induse în contactul concentrat conic, respectiv în cel conform circular.
Realizarea unui nou program de calcul bazat pe algoritmul descris în [Pol99], care rezolvă problema contactului elastic normal cu condiții limită în deplasări.
Realizarea unui program de calcul prin deconvoluție a distribuției de presiune care induce un câmp de deplasări normale cunoscut.
Realizarea a două programe de calcul, bazate pe două metode distincte, de rezolvare a problemei contactului elastic normal încărcat excentric și verificarea preciziei și a eficienței lor computaționale.
Realizarea unui program de calcul prin care este obținută numeric aproximanta suprafeței ameliorate a unui poanson echivalent care induce o distribuție de presiune impusă. Alegerea presiunii reprezentative se face în funcție de starea de tensiuni din semispațiu, urmărindu-se optimizarea capacității portante a contactului.
Verificarea numerică a unui model explicit existent privind ameliorarea distribuției de presiune în contactele eliptice dintre corpuri mărginite de suprafețe de grad superior.
Realizarea unui program de calcul prin DCFFT 2D al tensiunilor induse în semispațiul elastic de o distribuție arbitrară de tracțiuni de suprafață normale și tangențiale.
Realizarea unui program de calcul al distribuției de presiune și al stării de tensiuni din stratul elastic încărcat simetric cu poansoane asimilabile unor semispații elastice.
Realizarea unui program de calcul prin DCFFT 2D al deplasărilor normale ale frontierei induse de o distribuție arbitrară de deformații plastice.
Realizarea unui program de calcul numeric al tensiunilor induse în spațiul elastic infinit de un paralelipiped dreptunghic de deformații plastice uniforme. Acest calcul se exprimă fie sub forma unui produs de convoluție tridimensională, fie sub forma unui produs de convoluție după două direcții și corelație după a treia.
Realizarea unui program de calcul numeric al tensiunilor induse în semispațiu de o distribuție arbitrară de deformații plastice, printr-o formulare originală, care combină soluția aferentă paralelipipedului în spațiul infinit cu soluția stării de tensiuni induse în semispațiu de o distribuție arbitrară de tracțiuni normale.
Contribuții privind rezolvarea problemei contactului normal în domeniul elasto-plastic 49 Realizarea unui program de calcul al incrementului deformațiilor plastice prin
implementarea algoritmului universal de integrare a ecuațiilor plasticității propus de Fotiu și Nemat-Nasser.
Realizarea unui program de calcul al distribuției de presiune și al ariei de contact în contactul în domeniul elastic – perfect plastic, prin limitarea presiunii calculate după modelul pur elastic în funcție de constante dependente de material.
Realizarea, prin asamblarea subprogramelor enumerate anterior, a unui program de rezolvare a problemei contactului în domeniul elasto-plastic, având la bază corecția iterativă reciprocă dintre distribuția de presiune și deplasarea normală reziduală.
Validarea predicțiilor numerice ale programelor numerice proprii prin comparație cu formulări analitice existente în literatură, cu modelări numerice obținute prin algoritmi alternativi sau prin metoda elementului finit, precum și cu rezultate experimentale:
o programul de rezolvare a problemei contactului elastic normal cu condiții limită specificate prin tracțiuni, încărcat centric, este validat prin comparație cu: teoria contactului hertzian, [Her895]; formulele explicite avansate de Shtaerman, [Sht49], și Ciavarella,
[Cia99], pentru contactul concentrat conic, respectiv pentru cel conform circular, cu sau fără rază de racordare;
formulele explicite obținute pe baza dezvoltării teoretice a lui Diaconescu, [Dia06a], pentru contactul eliptic între corpuri mărginite de suprafețe de grad superior;
rezultatele experimentale raportate de Glovnea, [Glo99], privind lățirea ariei de contact sub efectul de capăt, pentru contactul liniar de lungime finită;
o programul de rezolvare a problemei contactului elastic normal cu condiții limită în deplasări este validat prin comparație cu teoria contactului hertzian;
o cele două variante de rezolvare a problemei contactului elastic normal încărcat excentric se validează reciproc, respectiv cu: formulele explicite avansate de Lurie, [Lur64]; predicțiile numerice obținute de Hartnett, [Har79], printr-o metodă
alternativă; o programul de rezolvare a problemei stratului elastic încărcat simetric se
validează prin comparație cu rezultatele obținute de Diaconescu și Glovnea, [Dia08a], printr-o metodă numerică alternativă;
o programul de rezolvare a problemei contactului normal în domeniul elasto-plastic este validat prin comparație cu: predicțiile programelor numerice avansate de Jacq, [Jac01],
Antaluca, [Ant05] sau Boucly, Nélias și Green, [Bou07]; simulările efectuate prin metoda elementului finit, respectiv printr-
un program incremental propriu, prezentate de Benchea și Crețu, [Ben08];
50 Contribuții privind rezolvarea problemei contactului normal în domeniul elasto-plastic
rezultatele experimentale privind adâncimea amprentei plastice la contactul în domeniul elasto-plastic prezentate de Jacq, [Jac01];
rezultate experimentale obținute pe Purice, [Pur05], privind deformațiile plastice de contact.
Contribuţii cu caracter aplicativ Elaborarea unor programe de calcul originale pentru rezolvarea următoarelor
probleme de contact elastic: o problema contactului elastic normal cu condiții limită specificate prin
tracțiuni de contact de rezultantă aplicată centric, respectiv excentric; o problema contactului elastic normal cu condiții limită specificate prin
deplasări; o problema suprafeței ameliorate a poansonului echivalent, considerând
drept criteriu capacitatea portantă a contactului; o problema stratului elastic încărcat simetric.
Elaborarea unor programe de calcul originale pentru rezolvarea următoarelor probleme de contact elasto-plastic:
o problema contactului normal în domeniul elastic – perfect plastic; o problema contactului normal în domeniul elasto-plastic, în condițiile unei
legi de ecruisare izotrope. Simularea, prin intermediul acestor programe, a comportării mai multor tipuri de
contacte întâlnite frecvent în aplicațiile inginerești.
VII.3 DIRECȚII DE CERCETARE ULTERIOARĂ Din analiza celor prezentate pe parcursul acestei lucrări, se conturează următoarele direcţii de cercetare: dezvoltarea programului de rezolvare a contactului elastic normal dintre corpuri
cu proprietăți elastice diferite prin includerea efectului încărcării tangențiale asupra ariei de contact;
analiza posibilităților de exprimare a suprafețelor sau profilelor poansoanelor ameliorate prin curbe sau suprafețe de formă liberă generate prin puncte de control;
dezvoltarea programului de rezolvare a problemei contactului normal în domeniul elasto-plastic, prin considerarea unei încărcări ciclice și a unei legi de ecruisare cinematică a materialului;
rezolvarea problemei contactului normal cu rostogolire în domeniul elasto-plastic;
dezvoltarea programului de rezolvare a problemei contactului normal prin cuplarea efectului curgerii plastice cu efectul termic, într-un model de contact termo-elasto-plastic;
rezolvarea problemei contactului în domeniul elasto-plastic încărcat normal și tangențial;
evidențierea efectului defectelor de suprafață asupra distribuției de presiune și asupra stării de tensiuni în contactul elasto-plastic;
rezolvarea numerică a problemei stratului elasto-plastic încărcat simetric.
Contribuții la rezolvarea problemei contactului normal în domeniul elasto-plastic 51
BIBLIOGRAFIE (selectiv) [All05] Allwood, J. M., 2005, “Survey and Performance Assessment of Solution
Methods for Elastic Rough Contact Problems”, ASME J. Tribol., vol. 127, pp. 10-23.
[Ant04] Antaluca, E., Nelias, D., Cretu, S., 2004, “A Three-Dimensional Friction Model for Elastic Plastic Contact with Tangential Loading – Application to Dented Surfaces”, ASME/STLE IJTC, Long Beach, paper 64331.
[Ant05] Antaluca, E., 2005, Contribution a l'étude des contacts élasto-plastiques - effet d'un chargement normal et tangentiel, Ph.D. Thesis, INSA Lyon, France.
[Arm66] Armstrong, P. J., and Frederick, C. O., 1966, “A Mathematical Representation of the Multiaxial Bauschinger Effect”, Central Electricity Generating Board, Report No. RD/B/N 731.
[Ben07] Benchea, M, and Crețu, S., 2007, “A Three-Dimensional Elastic-Plastic Analysis of Rolling Contacts”, 10th International Conference on Tribology, November 8-10, ISBN 978-973-78-38-49-0.
[Ben08] Benchea, M, and Crețu, S., 2008, “An Improved Incremental Model to Analyse Elastic - Plastic Concentrated Contacts – The Finite Element Analysis and Validation”, Acta Tribologica, Vol. 16, ISSN 1220-8434.
[Bou05] Boucly, V., Nélias, D., Liu, S., Wang, Q J., and Keer, L. M., 2005, “Contact Analyses for Bodies With Frictional Heating and Plastic Behavior”, ASME J. Tribol., 127, pp. 355 - 364.
[Bou07] Boucly, V., Nélias, D., and Green, I., 2007, “Modeling of the Rolling and Sliding Contact Between Two Asperities”, ASME J. Tribol., 129, pp. 235 - 245.
[Bou69] Boussinesq, J., 1969, Application des potentiels á l'etude de l'equilibre et du mouvement des solides élastiques, Reed. A. Blanchard, Paris.
[Che08] Chen, W. W., Liu, S., Wang, Q. J., 2008, “Fast Fourier Transform Based Numerical Methods for Elasto-Plastic Contacts of Nominally Flat Surfaces”, ASME J. Tribol., 75.
[Che08a] Chen, W. W., and Wang, Q. J., 2008, “Thermomechanical Analysis of Elastoplastic Bodies in a Sliding Spherical Contact and the Effects of Sliding Speed, Heat Partition, and Thermal Softening”, ASME J. Tribol., 130, pp. 041402-1 - 041402-10.
[Che08b] Chen, W. W., Wang, Q. J., Wang, F., Keer, L. M., and Cao, J., 2008, “Three-Dimensional Repeated Elasto-Plastic Point Contacts, Rolling, and Sliding”, ASME J. Tribol., 75, pp. 021021-1 - 021021-12.
[Che09] Chen, W. W., Wang, Q. J., 2009, “A Numerical Static Friction Model for Spherical Contacts of Rough Surfaces, Influence of Load, Material, and Roughness”, ASME J. Tribol., 131, pp. 021402-1 – 021402-8.
[Che09a] Chen, W. W., Wang, Q. J., and Kim, W., 2009, “Transient Thermomechanical Analysis of Sliding Electrical Contacts of Elastoplastic Bodies, Thermal Softening, and Melting Inception”, ASME J. Tribol., 131, pp. 021406-1 – 021406-10.
52 Contribuții la rezolvarea problemei contactului normal în domeniul elasto-plastic
[Chi77] Chiu, Y. P., 1977, “On the Stress Field Due to Initial Strains in a Cuboid Surrounded by an Infinite Elastic Space”, ASME J. Appl. Mech., 44, pp. 587–590.
[Chi78] Chiu, Y. P., 1978, “On the Stress Field and Surface Deformation in a Half Space with Cuboidal Zone in Which Initial Strains Are Uniform”, ASME J. Appl. Mech., 45, pp. 302–306.
[Cia99] Ciavarella, M., 1999, “Indentation by Nominally Flat or Conical Indenters with Rounded Corners”, Int. J. Solids Struct., 36, pp. 4149-4181.
[Cre02] Creţu, S., 2002, Mecanica Contactului (in Romanian), Vol. 1, Gheorghe Asachi Press, Iaşi.
[Cre02a] Creţu, S., Antaluca, E., 2002, “A Comparative Study on Numerical Methods Used to Obtain Pressure Distribution in Non-Hertzian Concentrated Contacts”, Prasic’02, November 7-8, Brasov, Romania, pp. 421-426.
[Cre03] Creţu, S., Antaluca, E., Creţu, O., 2003, “The Study of Non-Hertzian Concentrated Contacts by a GC-DCFFT Technique”, Rotrib’03 National Tribology Conference, Galaţi, Romania.
[Cre06] Crețu, S., “The Stress State of Normally Loaded Concentrated Contacts and the Autocorrelation Length of the Surface Roughness”, Proc. of VarEHD13, Suceava, October 6-7.
[Cre07] Crețu, S., and Benchea, M, 2007, “Residual Stresses Effect on Fatigue Life of Rolling Contacts”, 10th International Conference on Tribology, November 8-10, ISBN 978-973-78-38-49-0.
[Cre08] Crețu, S., and Benchea, M., 2008, “Residual Stresses Effect on Fatigue Life of Rolling Contacts”, The Annals of University “Dunărea de Jos” of Galați, Fascicle VIII, 2008 (XIV), Tribology. ISSN 1221-4590.
[Dia00] Diaconescu, E.N., Glovnea, M.L., and Floristean, L. 2000, “A New Experimental Technique to Assess the Contact Pressure”, VAREHD 10, Suceava, pp. 477 - 482
[Dia03] Diaconescu, E. N., 2003, “A Correlation between Pressure Distribution and Bounding Surfaces in Elastic Contacts”, Proceedings of 2003 STLE/ASME Joint International Tribology Conference, Ponte Vedra Beach, 8 pp. on CD.
[Dia03a] Diaconescu, E. N., 2003, “Hertz Theory Revisited”, private communication, Opening Plenary Session of 10th Romanian Tribology Conference, Galati.
[Dia03b] Diaconescu, E., Glovnea, M., Petrosel, O., 2003, “A New Experimental Technique to Measure Contact Pressure”, Proc. of 2003 STLE/ASME Joint International Tribology Conference, Ponte Vedra Beach, Florida, USA.
[Dia04] Diaconescu, E., Glovnea, M., 2004, “Visualization and Measurement of Contact Area by Reflectivity”, Proceedings of IJTC 2004: ASME/STLE International Joint Tribology Conference, Long Beach, California, USA.
[Dia06] Diaconescu, E., Glovnea, M., “Visualization and Measurement of Contact Area by Reflectivity”, ASME Journal of Tribology, Vol. 128, pp. 915-917.
[Dia06a] Diaconescu, E. N., “Elliptic Elastic Contact between High Order Symmetrical Surfaces”, ASME Journal of Tribology, Vol. 128, pp. 908-914.
[Dia06b] Diaconescu, E., Glovnea, M., 2006, “Pressure Distribution in Eccentrically Loaded Elastic Circular Contacts”, Proceedings of IJTC2006, STLE/ASME
Contribuții la rezolvarea problemei contactului normal în domeniul elasto-plastic 53
International Joint Tribology Conference October 22-25, San Antonio, TX, USA.
[Dia08] Diaconescu, E. N., and Glovnea, M. L., 2008, “A Semi-analytical Solution for Normal Contacts Involving a Thin Elastic Layer”, Paper ESDA2008-59402, Proc. of 9th Biennial Conference on Engineering Systems Design and Analysis, July 7-9, 2008, Haifa, Israel, 8pp. on CD.
[Dia08a] Diaconescu, E. N., and Glovnea, M. L., 2008, “A Boussinesq Type Problem for the Elastic Layer,” Proc. of STLE/ASME Int. Joint Tribology Conference, Miami, Florida, USA.
[Fot96] Fotiu, P. A., and Nemat-Nasser, S., 1996, “A Universal Integration Algorithm for Rate-Dependant Elastoplasticity”, Comput. Struct., 59, pp. 1173–1184.
[Gal07] Gallego, L., 2005, Fretting et Usure des Contacts Mécaniques: Modélisation Numérique, Ph.D. Thesis, INSA Lyon, France.
[Gal53] Galin, L. A., 1953, Contact Problems in the Theory of Elasticity (in Russian), Gostehizdat, Moscow, pp. 206–211.
[Gao06] Gao, Y. F., Bower, A. F., Kim, K.-S., Lev, L., and Cheng, Y. T., 2006, “The Behavior of an Elastic-Perfectly Plastic Sinusoidal Surface Under Contact Loading,” Wear, 261(2), pp. 145–154.
[Glo02] Glovnea, M. L., and Diaconescu, E. N., 2002, “New Optimization Criterion for Circular, Conformal Contacts”, Proceedings of the Third AITC Tribology Conference, Salerno, Italia, 8 pp. on CD.
[Glo04] Glovnea, M., Diaconescu, E.N., 2004, “New Investigations of Finite Length Line Contact”, Proceedings of TRIB 2004 ASME/STLE International Joint Tribology Conference Long Beach, California USA.
[Glo06] Glovnea, M. L., and Diaconescu, E. N., 2006, “Improvement of Punch Profiles for Elastic Circular Contacts”, ASME Journal of Tribology, 128, pp. 486-492.
[Gră05] Grădinaru, D., Spinu, S., Marchitan, M., 2005, “Numerical Resolution of Elastic Contact Problem by Influence Coefficients Matrix Inversion”, Acta Tribologica, Volume 13, ISSN 1220-8434.
[Gră06] Grădinaru, D., 2006, Numerical Modeling in Elastic Contact Theory, (in Romanian), PhD. Thesis, University of Suceava.
[Gră06a] Grădinaru, D., Diaconescu, E., Spinu, S., 2006, “On the Elastic Contact Problem Resolution by Iterative Increase of Contact Area”, Acta Tribologica, Vol. 14, ISSN 1220-8434.
[Gră06b] Grădinaru, D., Glovnea, M., Spinu, S., 2006, “Numerical and Experimental Research of Finite Length Line Contacts”, Acta Tribologica, Vol. 14, ISSN 1220-8434.
[Gră09] Grădinaru, D., Spinu, S., Marchitan, M., 2009, “Methods for Influence Coefficients Matrix Inversion in Elastic Contact Problems”, Annals of the University of Oradea, Fascicle of Management and Technological Engineering, ISSN 1583-0691.
[Her895] Hertz, H., 1895, “Uber die Beruhrung fester elasticher Korper”, Gesammelte Werke, Bd. 1, Leipzig, 155-173.
[Hil50] Hill, R., 1950, Theory of Plasticity, Oxford: University Press.
54 Contribuții la rezolvarea problemei contactului normal în domeniul elasto-plastic
[Hil93] Hills, D. A., Nowell, D., Sackfield, A., 1993, Mechanics of Elastic Contacts, Oxford, Butterworth Heinemann Ltd.
[Jac01] Jacq, C., 2001, Limite d'endurance et durée de vie en fatigue de roulement du 32CrMoV13 nitruré en présence d'indentations, Ph.D. Thesis, INSA Lyon, France.
[Jac02] Jacq, C., Nelias, D., Lormand, G., and Girodin, D., 2002, “Development of a Three-Dimensional Semi-Analytical Elastic-Plastic Contact Code”, ASME J. Tribol., 124, pp. 653–667.
[Joh85] Johnson, K. L., 1985, Contact Mechanics, Cambridge University Press. [Ju96] Ju, Y., and Farris, T. N., 1996, “Spectral Analysis of Two-Dimensional Contact
Problems”, ASME J. Tribol., 118, pp. 320–328. [Ju97] Ju, Y., Farris, T. N., 1997, “FFT Thermoelastic Solution for Moving Heat
Sources”, ASME Transaction, ASME J. Tribol., Vol. 119, pp. 156-162. [Kal90] Kalker, J.J., 1990, Three-Dimensional Elastic Bodies in Rolling Contact,
Kluwer Acad. Publ. [Lem88] Lemaître, J., Chaboche, J.L., 1988, Mécanique de materiaux solides, Paris:
Dunod, 544 p. [Liu00] Liu, S. B., Wang, Q., and Liu, G., 2000, “A Versatile Method of Discrete
Convolution and FFT (DC-FFT) for Contact Analyses”, Wear, 243 (1–2), pp. 101–111.
[Liu02] Liu, S. B., and Wang, Q., 2002, “Studying Contact Stress Fields Caused by Surface Tractions With a Discrete Convolution and Fast Fourier Transform Algorithm,” ASME J. Tribol., 124, pp. 36–45.
[Liu05] Liu, S. Wang, Q., 2005, “Elastic Fields due to Eigenstrains in a Half-Space”, ASME J. Appl. Mech. 72, pp. 871–878.
[Lov44] Love, A. E. H., 1944, A Treatise on the Mathematical Theory of Elasticity, Fourth Edition., Dover Publ.Inc.
[May95] Mayeur, C., 1995, Modélisation du contact rugueux élastoplastique, Ph.D. Thesis, INSA Lyon, France.
[Min50] Mindlin, R. D., and Cheng, D. H., 1950, “Thermoelastic Stress in the Semi-Infinite Solid”, Journal of Applied Physics, Vol. 21, pp. 931-933.
[Min50a] Mindlin, R. D., and Cheng, D. H., 1950, “Nuclei of Strain in the Semi-Infinite Solid”, J. Appl. Phys., 21, pp. 926–930.
[Min53] Mindlin, R. D, 1953, “Force at a Point in the Interior of a Semi-Infinite Solid”, Proceedings of First Midwestern Conference on Solid Mechanics, pp. 55-59.
[Moc76] Mocanu, D. R., și alții, 1976, Analiza experimentală a tensiunilor, (in Romanian) Vol. I, Editura Tehnică, București.
[Nél05] Nélias, D., Jacq, C., Lormand, G., Dudragne, G., and Vincent, A., 2005, “New Methodology to Evaluate the Rolling Contact Fatigue Performance of Bearing Steels With Surface Dents: Application to 32CrMoV13 (Nitrided) and M50 Steels”, ASME J. Tribol., 127, pp. 611 - 622.
[Nél06] Nélias, D., Boucly, V., and Brunet, M., 2006, “Elastic-Plastic Contact Between Rough Surfaces: Proposal for a Wear or Running-in Model”, ASME J. Tribol., 128, pp. 236 - 244.
Contribuții la rezolvarea problemei contactului normal în domeniul elasto-plastic 55
[Nél07] Nélias, D., Antaluca, E., Boucly, V., and Crețu, S., 2007, “A Three-Dimensional Semianalytical Model for Elastic-Plastic Sliding Contacts”, ASME J. Tribol., 129, pp. 761 - 771.
[Nél07a] Nélias, D., Antaluca, E., and Boucly, V., 2007, “Rolling of an Elastic Ellipsoid Upon an Elastic-Plastic Flat”, ASME J. Tribol., 129, pp. 791 - 800.
[Nog97] Nogi, T., and Kato, T., 1997, “Influence of a Hard Surface Layer on the Limit of Elastic Contact; Part I - Analysis Using a Real Surface Model”, ASME J. Tribol., 119, pp. 493–500.
[Pol00] Polonsky, I. A., and Keer, L. M., 2000, “A Fast and Accurate Method for Numerical Analysis of Elastic Layered Contacts”, ASME J. Tribol., 122, pp. 30–35.
[Pol00a] Polonsky, I. A., and Keer, L. M., 2000, “Fast Methods for Solving Rough Contact Problems: A Comparative Study”, ASME J. Tribol., 122, pp. 36–41.
[Pol99] Polonsky, I. A., and Keer, L. M., 1999, “A Numerical Method for Solving Rough Contact Problems Based on the Multi-Level Multi-Summation and Conjugate Gradient Techniques”, Wear, 231(2), pp. 206–219.
[Sht49] Shtaerman, I., 1949, Contact Problems in the Theory of Elasticity, (in Russian), Gostehizdat, Moscow.
[Spi06] Spinu, S., Grădinaru, D., and Marchitan, M., 2006, “FFT Analysis of Elastic Non-Hertzian Contacts – Effect of Rounding Radius upon Pressure Distribution and Stress State”, Proc. of VAREHD13 - 13th Conference on EHD Lubrication and Traction, Suceava.
[Spi06a] Spinu, S., Marchitan, M., 2006, “FFT Investigations of Pressure Distribution in an Elastoplastic Contact Problem”, Proc. of VAREHD13 - 13th Conference on EHD Lubrication and Traction, Suceava.
[Spi07] Spinu, S., Grădinaru, D., and Marchitan, M., 2007, “Improvement of Pressure Distribution in Elastic Non-Hertzian Contacts – Numerical Simulations”, Acta Tribologica, Vol. 15, ISSN 1220-8434.
[Spi07a] Spinu, S., Cerlinca, D., 2007, “Analiza FEM a stării de tensiuni la contactul elastic nehertzian”, (in Romanian), Tehnomus XIV – The 14th International Conference Tehnomus, Suceava, ISSN-1224-029X.
[Spi07b] Spinu, S., Grădinaru, D., and Marchitan, M., 2007, “Numerical Analysis of Optimum Front Surface of a Squared Section Punch”, Proc. of ROTRIB’07 - 10th International Conference on Tribology, Bucharest.
[Spi08] Spinu, S., Diaconescu, E., 2008, “Numerical Simulation of Elastic Conforming Contacts under Eccentric Loading”, Proceedings of the STLE/ASME International Joint Tribology Conference IJTC2008, Miami, Florida, USA.
[Spi08a] Spinu, S., Suciu, C., 2008, “Numerical Simulation of Elastic Finite Length Line Contact under Eccentric Loading”, Acta Tribologica, Vol. 16, ISSN 1220-8434.
[Spi08b] Spinu, S., 2008, “A Refined Numerical Method for Elastic Contact Problem with a Tilting Torque on the Contact Area”, Acta Tribologica, Vol. 16, ISSN 1220-8434.
56 Contribuții la rezolvarea problemei contactului normal în domeniul elasto-plastic
[Spi09] Spinu, S., Diaconescu, E., 2009, “Contact Stress State in Elastic Layers”, Proceedings of ASME/STLE International Joint Tribology Conference, IJTC2009, October 19-21, Memphis, Tennessee, USA.
[Suc08a] Suciu, C., Diaconescu, E., Spinu, S, 2008, “Experimental Set-Up and Preliminary Results upon a New Technique to Measure Contact Pressure”, Proc. of 14th Conference on EHD Lubrication and Traction, VAREHD14, Suceava.
[Tim70] Timoshenko, S., and Goodier, J. N., 1970, Theory of Elasticity, McGraw-Hill, 3rd ed., p. 466.
[Wan05] Wang, F., and Keer, L. M., 2005, “Numerical Simulation for Three Dimensional Elastic-Plastic Contact With Hardening Behavior”, ASME J. Tribol., 127, pp. 494–502.
[Wan09] Wang, F. S., Block, J. M., Chen, W. W., Martini, A., Zhou, K., Keer, L. M., and Wang, Q. J., “A Multilevel Model for Elastic-Plastic Contact Between a Sphere and a Flat Rough Surface”, ASME J. Tribol., 131, pp. 021409-1 – 021409-6.
[Yam81] Yamamoto, T., Eguchi, M., Murayama, K., 1981, “Stress Concentration in the Vecinity of a Hole Defect under Conditions of Hertzian Contact”, ASLE Trans., Vol. 24, pp. 511-518.
[Zho09] Zhou, K., Chen, W. W., Keer, L. M., and Wang, Q. J., 2009, “A Fast Method for Solving Three-Dimensional Arbitrarily Shaped Inclusions in a Half-Space”, Comput. Methods Appl. Mech. Engrg, 198, pp. 885 - 892.
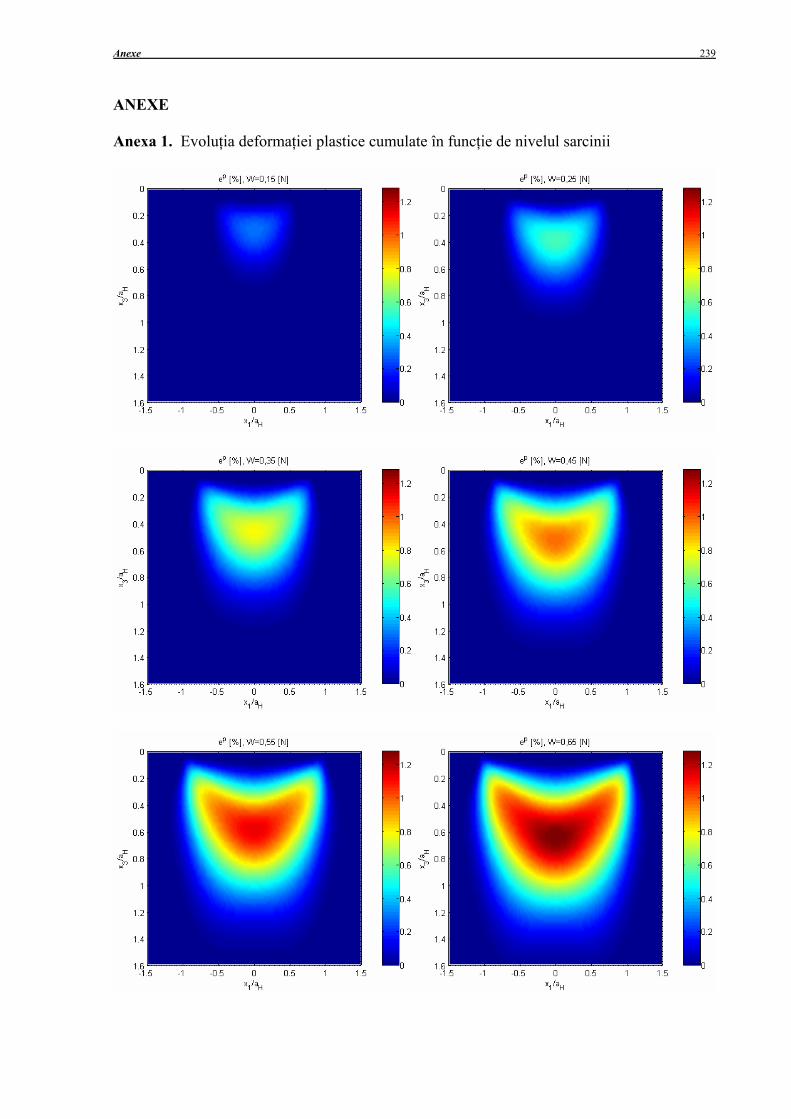
Anexe 239
ANEXE Anexa 1. Evoluția deformației plastice cumulate în funcție de nivelul sarcinii
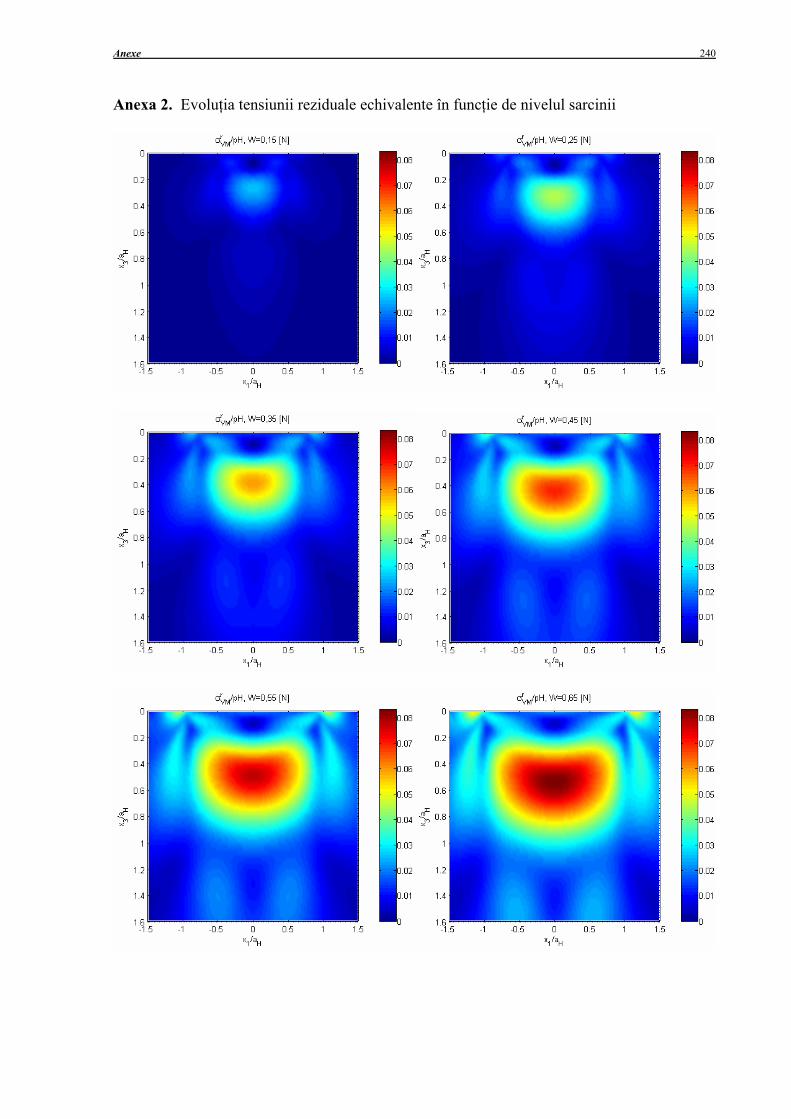
Anexe 240
Anexa 2. Evoluția tensiunii reziduale echivalente în funcție de nivelul sarcinii
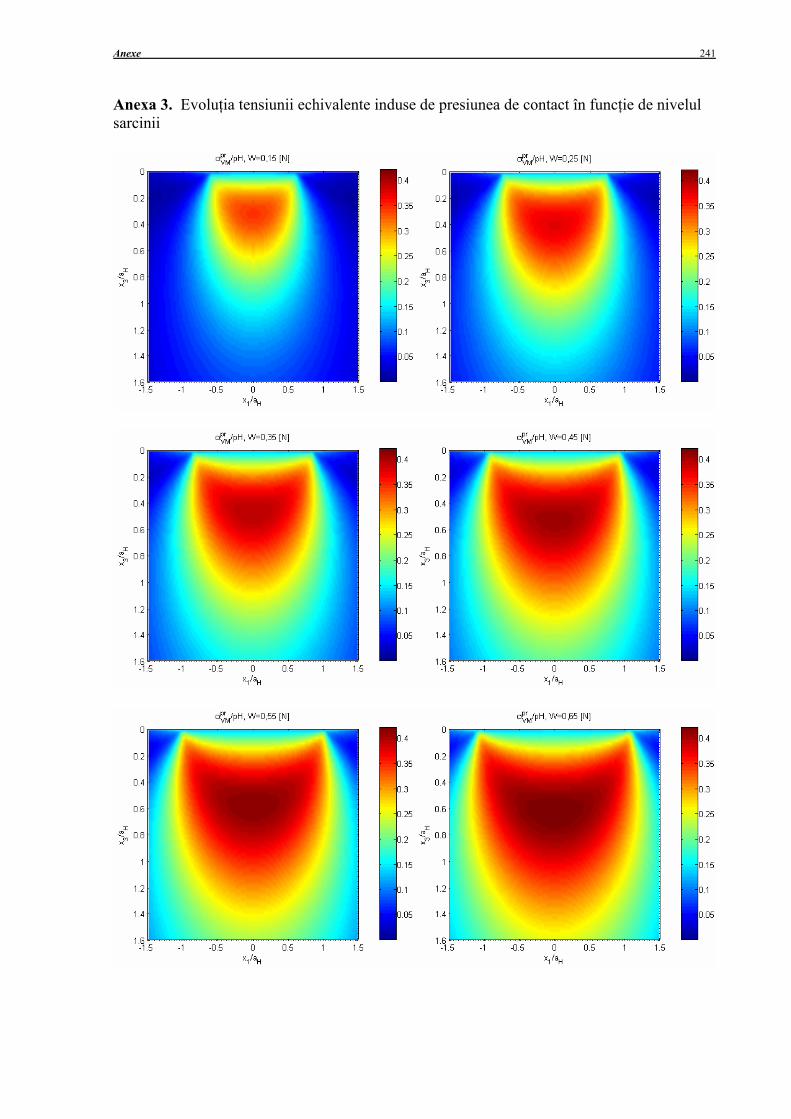
Anexe 241
Anexa 3. Evoluția tensiunii echivalente induse de presiunea de contact în funcție de nivelul sarcinii
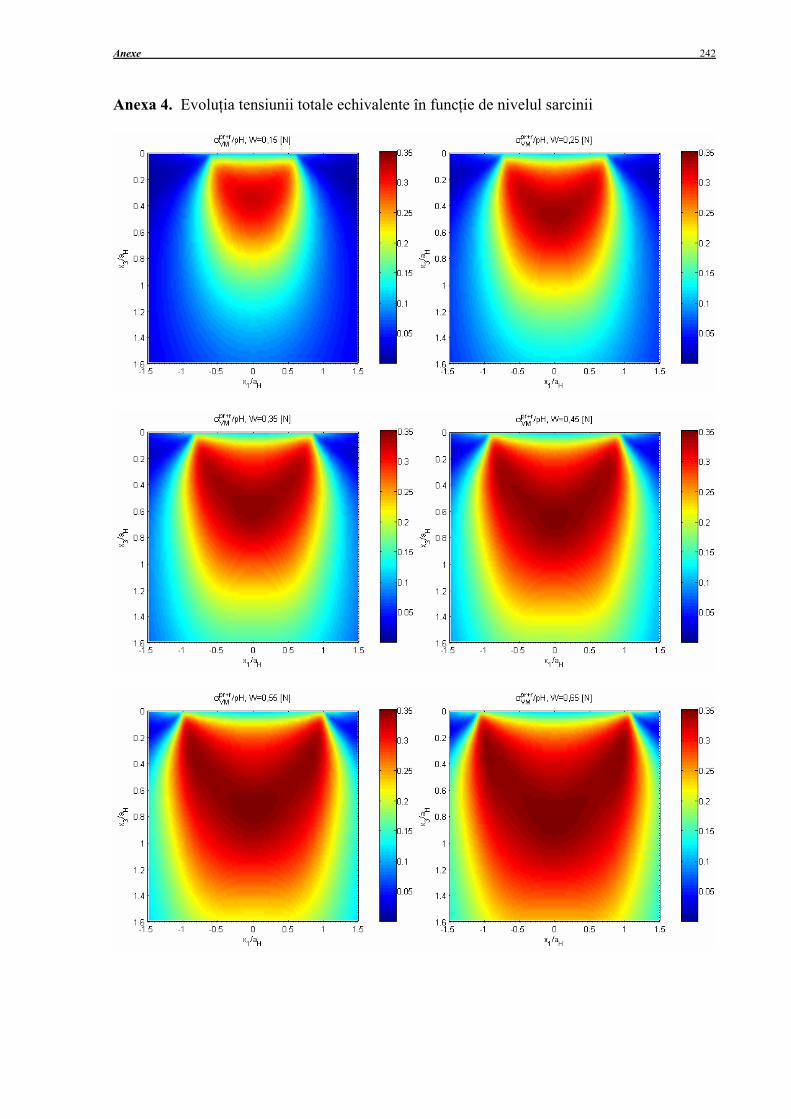
Anexe 242
Anexa 4. Evoluția tensiunii totale echivalente în funcție de nivelul sarcinii
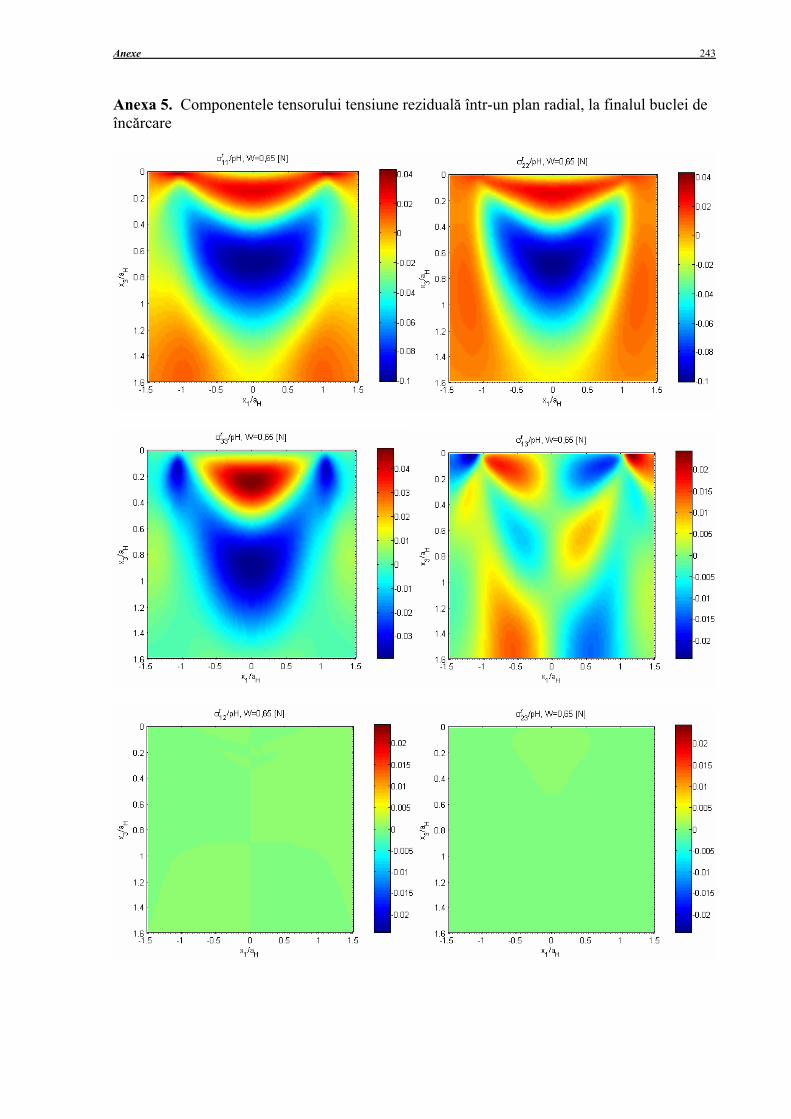
Anexe 243
Anexa 5. Componentele tensorului tensiune reziduală într-un plan radial, la finalul buclei de încărcare


















