
Cinematica
29
1
-
Upload
mariana-stan -
Category
Education
-
view
100 -
download
4
Transcript of Cinematica

1
2
NONOŢIUNI GENERALEŢIUNI GENERALE
FIZICAFIZICA- parte a ştiinţei care studiază legile ce - parte a ştiinţei care studiază legile ce guvernează comportamentul extern şi intern a guvernează comportamentul extern şi intern a corpurilor din Univers şi interavţiunea acestora.corpurilor din Univers şi interavţiunea acestora.
După obiectul de studiu, fizica are următorele După obiectul de studiu, fizica are următorele ramuri:ramuri:
Mecanică, electricitate, magnetism, optică, fizica Mecanică, electricitate, magnetism, optică, fizica nucleului, termodinamică, hidrostatică, etc.nucleului, termodinamică, hidrostatică, etc.
MecanicaMecanica – parte a fizicii care studiază fenomene – parte a fizicii care studiază fenomene legate de mişcarea mecanică.legate de mişcarea mecanică.
Mişcarea mecanicăMişcarea mecanică – modificarea poziţiei unui corp în – modificarea poziţiei unui corp în raport cu altul considerat fix.raport cu altul considerat fix.
3
NONOŢIUNI GENERALEŢIUNI GENERALE
Mărime fizicăMărime fizică – orice proprietate măsurabilă a unui – orice proprietate măsurabilă a unui corp.Mărimea fizică este descrisă prin :corp.Mărimea fizică este descrisă prin :
DefiniţiaDefiniţia – arată proprietatea pe care o măsoară, – arată proprietatea pe care o măsoară,
SimbolulSimbolul – litera cu care este notată, recunoscută, – litera cu care este notată, recunoscută,
Formula Formula – relaţia matematică,– relaţia matematică,
Unitatea de măsurăUnitatea de măsură – permite descrierea cantitativă, – permite descrierea cantitativă,
MăsurareaMăsurarea – instrumentul de determinare a valorii. – instrumentul de determinare a valorii.
4
CLASIFICAREA CLASIFICAREA MĂRIMILOR FIZICEMĂRIMILOR FIZICE
Mărimi fizice scalareMărimi fizice scalare – mărimile caracterizate – mărimile caracterizate integral printr-o valoare algebrică.integral printr-o valoare algebrică.Mărimi vectorialeMărimi vectoriale – mărimi caracterizate prin – mărimi caracterizate prin valoare şi orientare (valoare şi orientare (origine, direcţie şi sensorigine, direcţie şi sens). ).
VectorulVectorul – simbolul matematic al unei mărimi – simbolul matematic al unei mărimi vectoriale. Caracteristicile unui vector:vectoriale. Caracteristicile unui vector:
Direcţie Direcţie – dreapta suport– dreapta suportOrigineOrigine – punct de aplicaţie – punct de aplicaţieModul Modul – valoare algebrică (lungimea)– valoare algebrică (lungimea)ExtremitateExtremitate – sensul acţiunii. – sensul acţiunii.

5
OPERAŢII CU VECTORIOPERAŢII CU VECTORI
b
b
Compunerea vectorilorCompunerea vectorilor – include însumarea şi – include însumarea şi diferenţa a doi vectori .diferenţa a doi vectori .
Metode de compunereMetode de compunere – grafică, analitică. – grafică, analitică.
ba
ba
ConcluConcluzzieie – – vectorulvectorul sumăsumă este este diagonala marediagonala mare, iar , iar vectorul diferenţăvectorul diferenţă este este diagonala mică, diagonala mică, a a paralelogramului format de cei doi vectori.paralelogramului format de cei doi vectori.
a

6
OPERAŢII CU VECTORIOPERAŢII CU VECTORI
Regula paralelogramuluiRegula paralelogramului – costă în compunerea – costă în compunerea vectorilor prin poziţionarea acestora cu originea vectorilor prin poziţionarea acestora cu originea comună.comună.
DiferenţaDiferenţa = suma vectorului cu opusul celui de-al = suma vectorului cu opusul celui de-al doilea.doilea.
Vector opusVector opus – vector cu aceeaşi direcţie, acelaşi modul, – vector cu aceeaşi direcţie, acelaşi modul, dar sens opus.Se simbolizează cu semnul minus înaintea dar sens opus.Se simbolizează cu semnul minus înaintea simbolului vectorului dat.simbolului vectorului dat.
Modulul vectorului rezultantModulul vectorului rezultant: : baunde
babaR
,
cos2222
7
OPERAŢII CU VECTORIOPERAŢII CU VECTORI
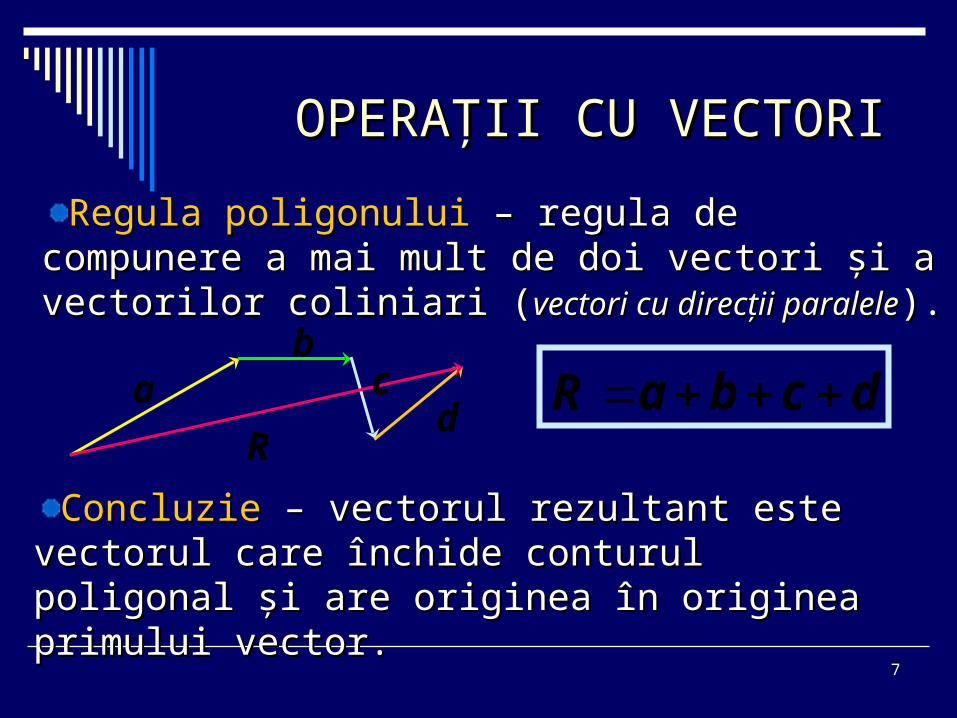
Regula poligonuluiRegula poligonului – regula de compunere a – regula de compunere a mai mult de doi vectori şi a vectorilor coliniari mai mult de doi vectori şi a vectorilor coliniari ((vectori cu direcţii paralelevectori cu direcţii paralele).).
b
c
d dcbaR
R
ConcluzieConcluzie – vectorul rezultant este vectorul – vectorul rezultant este vectorul care închide conturul poligonal şi are originea care închide conturul poligonal şi are originea în originea primului vector.în originea primului vector.
a
8
OPERAŢII CU VECTORIOPERAŢII CU VECTORI
aaa
aaa
2
2
a
a a
a
2
a
2
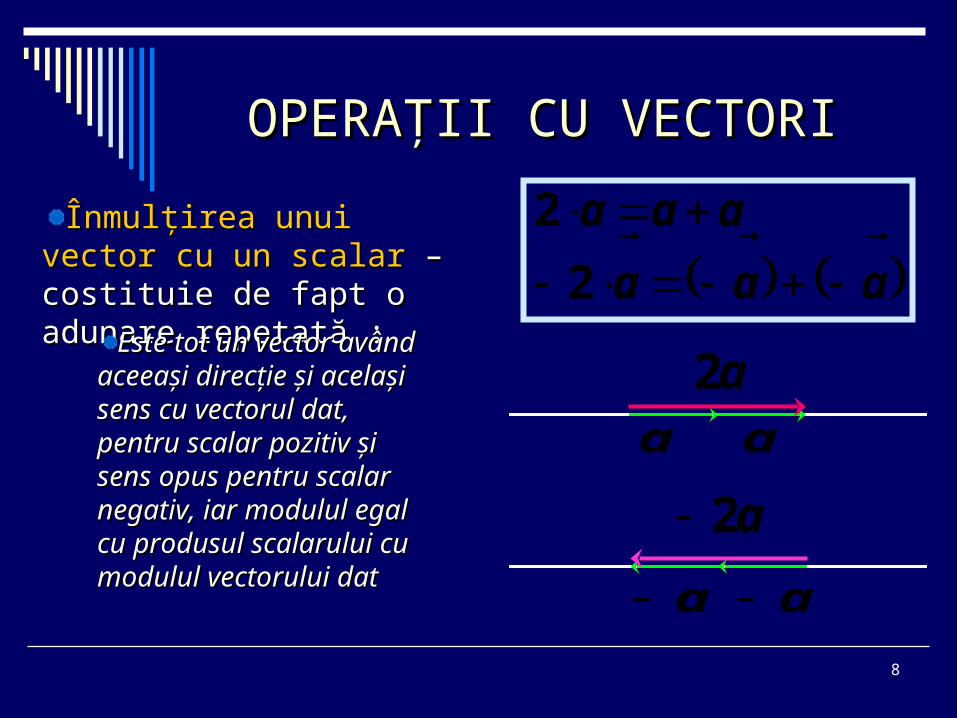
Înmulţirea unui vector Înmulţirea unui vector cu un scalarcu un scalar – costituie – costituie de fapt o adunare de fapt o adunare repetată :repetată :Este tot un vector Este tot un vector
având aceeaşi direcţie având aceeaşi direcţie şi acelaşi sens cu şi acelaşi sens cu vectorul dat, pentru vectorul dat, pentru scalar pozitiv şi sens scalar pozitiv şi sens opus pentru scalar opus pentru scalar negativ, iar modulul negativ, iar modulul egal cu produsul egal cu produsul scalarului cu modulul scalarului cu modulul vectorului datvectorului dat
a
9
VERSORIVERSORI
Vectorul reprezentat prin versori uşurează calculul Vectorul reprezentat prin versori uşurează calculul componentelor unui vector.componentelor unui vector.
Prin descompunerea unui vector pe două direcţii date Prin descompunerea unui vector pe două direcţii date se obţin doi vectori a căror rezultantă este vectorul dat.se obţin doi vectori a căror rezultantă este vectorul dat.
VersoriiVersorii – sunt vectori unitari ai căror orientare – sunt vectori unitari ai căror orientare coincide cu orientarea axei aleasă ca direcţie de coincide cu orientarea axei aleasă ca direcţie de proiectare a vectorului.proiectare a vectorului.
Pentru axa OX – versorulPentru axa OX – versorul
Pentru axa OY – versorul Pentru axa OY – versorul
Pentru axa OZ – versorul Pentru axa OZ – versorul
i
j
k
10
COMPONENTELE UNUI COMPONENTELE UNUI VECTORVECTOR
a
i
j
xa
ya
Ax
Ay A
y
x
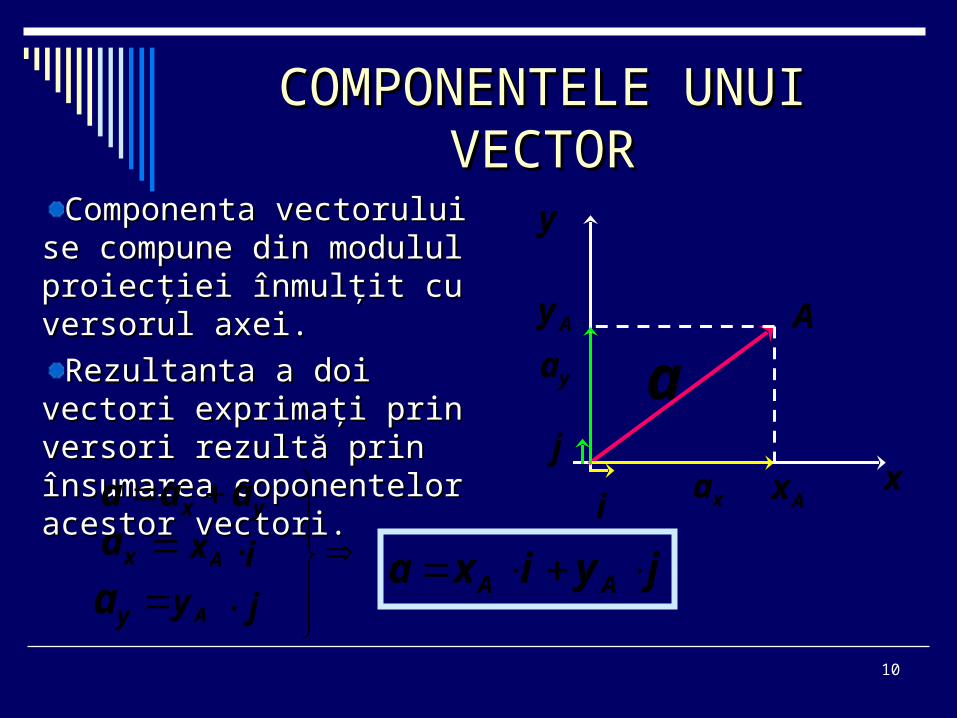
jyixa AA
xa
Ax i
ya Ay j
Componenta vectorului se Componenta vectorului se compune din modulul compune din modulul proiecţiei înmulţit cu proiecţiei înmulţit cu versorul axei.versorul axei.
ReRezultanta a doi vectori zultanta a doi vectori exprimaţi prin versori exprimaţi prin versori rezultă prin însumarea rezultă prin însumarea coponentelor acestor vectori.coponentelor acestor vectori.
yx aaa

11
MMĂRIMI FIZICEĂRIMI FIZICE
Mărimi scalareMărimi scalare
Masa Masa
DensitateaDensitatea
DinstanţaDinstanţa
EnergiaEnergia
Lucru mecanicLucru mecanic
Mărimi vectorialeMărimi vectorialeDeplasareaDeplasarea
VitezaViteza
AcceleraţiaAcceleraţia
ForţaForţa
Momentul forţeiMomentul forţei
Momentul cineticMomentul cineticVor fi studiate în Vor fi studiate în cadrul cinematicii.cadrul cinematicii.
kgm 1
31
mkg
ρ
md 1
JW 1
JL 1
12
STUDIUL MIŞCĂRII STUDIUL MIŞCĂRII MECANICEMECANICE
CINEMATICA CINEMATICA – studiază mişcarea mecanică – studiază mişcarea mecanică fără a analiza cauzele mişcării. fără a analiza cauzele mişcării. Foloseşte noţiunea Foloseşte noţiunea de sistem de referinţă, punct material şi traiectorie.de sistem de referinţă, punct material şi traiectorie.
DINAMICADINAMICA – studiază mişcarea micanică – studiază mişcarea micanică pornind de la cauzele mişcării. pornind de la cauzele mişcării. Se studiază pe baza Se studiază pe baza legilor de conservare a energiei.legilor de conservare a energiei.
STATICASTATICA – studiază oun caz particular al – studiază oun caz particular al mişcarii mecanice, repausul, mai exact starea mişcarii mecanice, repausul, mai exact starea de echilibru a corpurilor. de echilibru a corpurilor. Echilibrul de rotaţie şi de Echilibrul de rotaţie şi de translaţie.translaţie.

13
14
CINEMATICACINEMATICA
DEFINIREDEFINIRE
DEPLASAREADEPLASAREA
VITEZAVITEZA
ACCELERAACCELERAŢŢIAIA
TIPURI DE MITIPURI DE MIŞŞCCĂĂRI ALE PUNCTULUI RI ALE PUNCTULUI MATERIALMATERIAL
15
CINEMATICACINEMATICA
Parte a fizicii care se ocupParte a fizicii care se ocupă cu studiul mişcării ă cu studiul mişcării corpurilor fără a considera cauzele mişcării.corpurilor fără a considera cauzele mişcării.
Important în studiul cinematic al mişcării este Important în studiul cinematic al mişcării este alegerea sistemului de referinţă cel mai favorabilalegerea sistemului de referinţă cel mai favorabil. . Sistemul de referinţă, bine ales, implică o uşurare Sistemul de referinţă, bine ales, implică o uşurare a studiului mişcării.a studiului mişcării.
Sistemul de referinţăSistemul de referinţă – ansamblul format din – ansamblul format din observator, riglă şi ceas şi este reprezentat grafic observator, riglă şi ceas şi este reprezentat grafic printr-un sistem de axe rectangulare având printr-un sistem de axe rectangulare având originea în poziţia ocupată de observator.originea în poziţia ocupată de observator.
16
CINEMATICACINEMATICA
Pentru acest tip de studiu foloseşte noţiunile Pentru acest tip de studiu foloseşte noţiunile de : de :
Punct material-Punct material- punct geometric cu masă. punct geometric cu masă.
CoordonateCoordonate – mărimile fizice care definesc poziţia – mărimile fizice care definesc poziţia mobilului în timp (mobilului în timp (coordonate temporalecoordonate temporale) şi spaţiu ) şi spaţiu ((coordonate spaţialecoordonate spaţiale) .) .
TraiectorieTraiectorie – mulţimea punctelor atinse de mobil – mulţimea punctelor atinse de mobil în mişcare (urma lăsată de mobil în mişcare).în mişcare (urma lăsată de mobil în mişcare).
Traiectoriile pot fi :Traiectoriile pot fi :RectiliniiRectilinii
CurbiliniiCurbilinii

17
COORDONATECOORDONATE
Problema generalProblema generalăă a cinematecii este aceea de a a cinematecii este aceea de a determina traiectoria, determina traiectoria, viteza, acceleraviteza, acceleraţţiaia,, dac dacăă se cunoa se cunoaşşte legea de mite legea de mişşccăăre a mobilului.re a mobilului.
Fie dat un sistem de referinFie dat un sistem de referinţăţă cartezian Oxyz, legile de mi cartezian Oxyz, legile de mişşcare pe cele care pe cele trei directrei direcţţii se pot scrie:ii se pot scrie:
1 2 3x f (t), y f (t), z f (t)
sau r f t
unde r xi yj zk
i, j,k, sunt
versorii celor trei axe .
z
M
y
x
k r
i
j
xr yr
zr
18
DEPLASAREADEPLASAREA
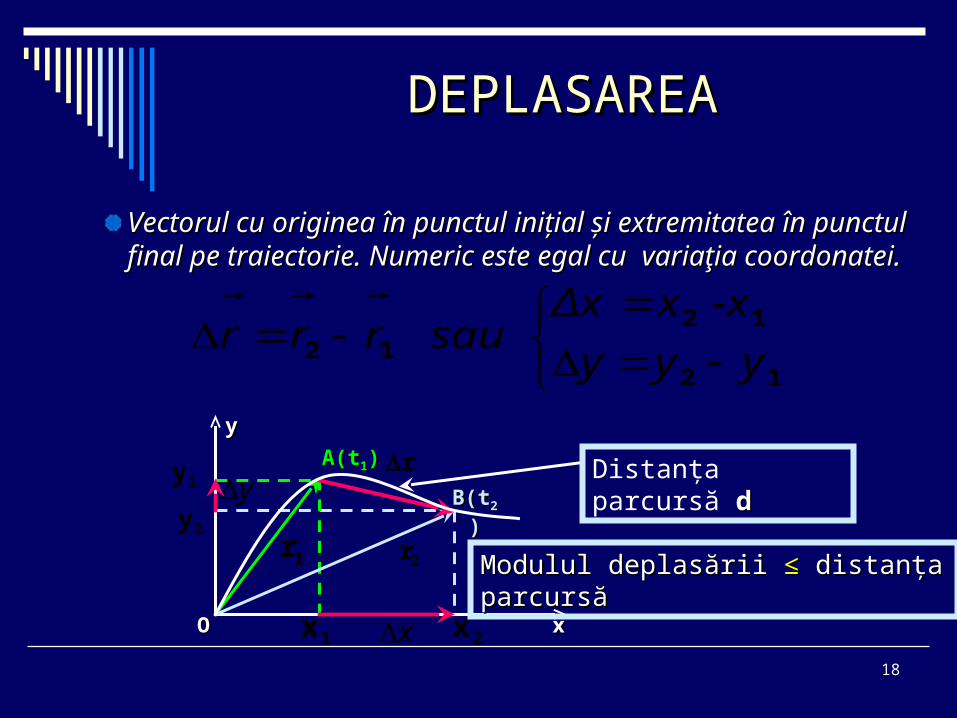
Vectorul cu originea în punctul iniţial şi extremitatea în Vectorul cu originea în punctul iniţial şi extremitatea în punctul final pe traiectorie. Numeric este egal cu punctul final pe traiectorie. Numeric este egal cu variavariaţţia coordonateia coordonateii..
12
1212
yyy
-xxΔxsaurrr
OO
A(tA(t11))
B(tB(t22))
xx
yy
2y
1r
2r
r
x
1x 2x
1y Distanţa parcursă dd
Modulul deplasării Modulul deplasării ≤≤ distanţa distanţa parcursăparcursă
y

19
VITEZAVITEZA MEDIE MEDIE
11
rΔΔt
vtr
v mm
Mărimea vectorială care caracterizează mişcarea şi este Mărimea vectorială care caracterizează mişcarea şi este numeric egală cu numeric egală cu raportul dintre deplasare raportul dintre deplasare şşi durati durata efectuării a efectuării acesteia,acesteia, iar vectorul viteză are aceeaşi orientare cu vectorul iar vectorul viteză are aceeaşi orientare cu vectorul deplasare.deplasare.
Mărimea introdusă pentru studiul mişcării corpurilor, raportând Mărimea introdusă pentru studiul mişcării corpurilor, raportând deplasarea efectuată la durată, caz în care se obţine o valoare deplasarea efectuată la durată, caz în care se obţine o valoare medie .medie .
sm
v SI 1
Din relaţia (1) rezultă că viteza medie are acelaţi sens cu vectorul deplasare (înmulţirea unui vector cu un scalar)
OO
A(tA(t11))
B(tB(t22))
xx
yy
2y
1r
2r
r
1x 2x
1y mv
20
VITEZA MOMENTANĂVITEZA MOMENTANĂ
rdr
dttrt
00
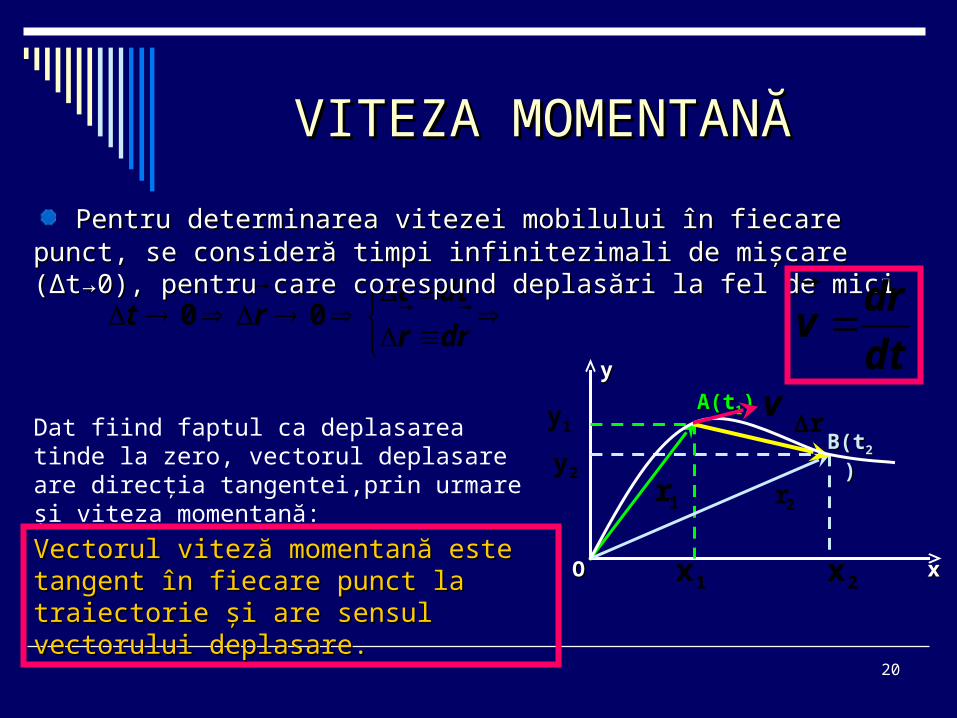
Pentru determinarea vitePentru determinarea vitezzei mobilului ei mobilului îîn fiecare punctn fiecare punct, se , se consideră timpi infinitezimali de mişcare (consideră timpi infinitezimali de mişcare (ΔΔt→0), pentru care t→0), pentru care corespund deplasări la fel de mici :corespund deplasări la fel de mici :
dtrd
v
Dat fiind faptul ca deplasarea tinde la zero, vectorul deplasare are direcţia tangentei,prin urmare şi viteza momentană:
OO
A(tA(t11))
B(tB(t22))
xx
yy
2y
1r
2r
r
1x 2x
1y v
Vectorul viteză momentană este Vectorul viteză momentană este tangent în fiecare punct la traiectorie tangent în fiecare punct la traiectorie şi are sensul vectorului deplasare.şi are sensul vectorului deplasare.

21
CAZUL MIŞCĂRII CAZUL MIŞCĂRII RECTILINII UNIFORMERECTILINII UNIFORME
Mişcare mobilului pe o Mişcare mobilului pe o traiectorie rectilinietraiectorie rectilinie cu cu viteza viteza constantăconstantă..
x0 0x x
0tA
dx
tB0r
r
r
v
Pentru viteză constantă, viteza medie devine identică cu viteza Pentru viteză constantă, viteza medie devine identică cu viteza momentană.momentană.
0
0
0
0 ttxx
vttt
xxxdar
tx
vsautr
v
00 ttvxx Pentru tPentru t00=0, x-x=0, x-x00=d, rezultă relaţia =d, rezultă relaţia uzuală :uzuală :
tvd
22
LEGEA MIŞCĂRIILEGEA MIŞCĂRII
În relaţia dedusă anterior În relaţia dedusă anterior observăm că timpul observăm că timpul t t este variabila este variabila independentă, care se independentă, care se află la puterea întâi şi află la puterea întâi şi xx este variabila este variabila dependentă de timp prin dependentă de timp prin relaţia ce include relaţia ce include constantele precizând constantele precizând poziţia şi momentul poziţia şi momentul iniţial, fapt care este iniţial, fapt care este echivalent cu o funcţie de echivalent cu o funcţie de gradul I- funcţie liniară.gradul I- funcţie liniară.
Pentru tPentru t00=0, rezultă :=0, rezultă :
Relaţie care poate fi Relaţie care poate fi scrisă sub forma : scrisă sub forma :
Relaţie ce corespunde Relaţie ce corespunde unei legi de mişcare, unei legi de mişcare, deoarece arată deoarece arată modificarea modificarea coordonatei spaţiale în coordonatei spaţiale în timp.timp.
tvxx 0
tfx

23
LEGEA MIŞCĂRII LEGEA MIŞCĂRII RECTILINII UNIFORMERECTILINII UNIFORME
00 :
00 :0
xxtoxfGv
xtxotfG
tvxx
0;0
v
xA
0;0 xB
DeterminăDeterminăm punctele m punctele de de intersecţie intersecţie cu cu graficul:graficul:Viteza este Viteza este pozitivă pozitivă când are când are sensul axei, sensul axei, arbitrar arbitrar aleasă şi aleasă şi negativă în negativă în sens sens contrar.contrar.
x
0x
0,0 00 xv
vx 0,0 0
0 xvvx
0,0 00 xv
vx 0,0 0
0 xvvx
0x
y
0
24
ACCELERAACCELERAŢŢIAIA
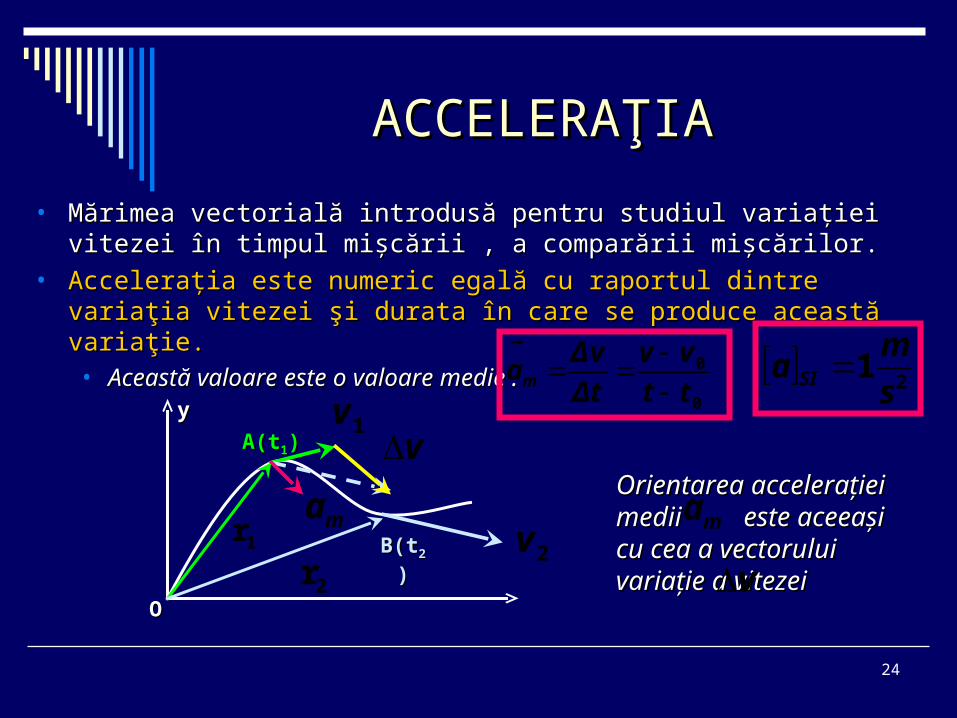
• Mărimea vectorială introdusă pentru studiul variaţiei vitezei Mărimea vectorială introdusă pentru studiul variaţiei vitezei în timpul mişcării , a comparării mişcărilor.în timpul mişcării , a comparării mişcărilor.
• Acceleraţia este numeric egală cuAcceleraţia este numeric egală cu raportul dintre varia raportul dintre variaţţia ia vitezei vitezei şşi durata i durata îîn care se produce aceastn care se produce aceastăă varia variaţţie.ie. • Această valoare este o valoare medie .Această valoare este o valoare medie .
ttvv
ΔtvΔ
am0
0
21sm
a SI
OO
A(tA(t11))
B(tB(t22))
yy
1r
2r
1v
2v
v
ma Orientarea Orientarea
acceleraţiei medii acceleraţiei medii este aceeaşi cu cea este aceeaşi cu cea a vectorului variaţie a a vectorului variaţie a vitezei vitezei
v
ma
25
MIŞCAREA RECTILINIE MIŞCAREA RECTILINIE UNIFORM VARIATĂUNIFORM VARIATĂ
Mişcare mobilului pe o traiectorie rectilinie cu Mişcare mobilului pe o traiectorie rectilinie cu acceleraţia constantă.acceleraţia constantă.
Legea Legea mişcării rezultă din legea mişcării rectilinii uniforme mişcării rezultă din legea mişcării rectilinii uniforme la care se înlocuieşte viteza cu valoarea medie a acesteia.la care se înlocuieşte viteza cu valoarea medie a acesteia.
Pentru calculul valorii medii a vitezei trebuie determinată Pentru calculul valorii medii a vitezei trebuie determinată funcţia de variaţie în timp a vitezei, deoarece :funcţia de variaţie în timp a vitezei, deoarece :
Pentru o funcPentru o funcţie de gradul Iţie de gradul I – valoarea medie= media – valoarea medie= media aritmeticăaritmetică
Pentro o funcţie de gradul IIPentro o funcţie de gradul II – valoarea medie=media – valoarea medie=media geometricăgeometrică
m0 0x x v t t
26
LEGEA VITEZEILEGEA VITEZEI
Acceleraţia fiind constantă, valoarea medie Acceleraţia fiind constantă, valoarea medie devine identică cu valoarea momentană :devine identică cu valoarea momentană :
Adică , realţie care indică o Adică , realţie care indică o dependenţă liniară de timp a vitezei .dependenţă liniară de timp a vitezei .
Prin urmare, valoarea medie a vitezei va fi :Prin urmare, valoarea medie a vitezei va fi :
În aceste condiţii viteza medie este :În aceste condiţii viteza medie este :
0
0
ttvv
atv
a
00 ttavv
20vv
vm
tfv
2000 vttav
vm 00 2tt
avvm
27
LEGEA MIŞCĂRII LEGEA MIŞCĂRII RECTILINII UNIFORM RECTILINII UNIFORM
VARIATEVARIATEÎnlocuind valoare medie a vitezei în relaţia legii Înlocuind valoare medie a vitezei în relaţia legii mişcării pentru o deplasare rectilinie, rezultă legea mişcării pentru o deplasare rectilinie, rezultă legea mişcării rectilinii uniform variate:mişcării rectilinii uniform variate:
Din legea mişcării rezultă o dependenţă pătratică a Din legea mişcării rezultă o dependenţă pătratică a
coordonatei de timp , ceea ce se coordonatei de timp , ceea ce se
trenscrie grafic printr-o parabolă.trenscrie grafic printr-o parabolă.
0 0
20 0 0 0
0 0x x t ta
ax x v t t t t
2
v t t2
2x f t
28
x, v
O
t
x, v
t
a>0 a<0
0xmx
mt0v
mx
0x
0v
mt
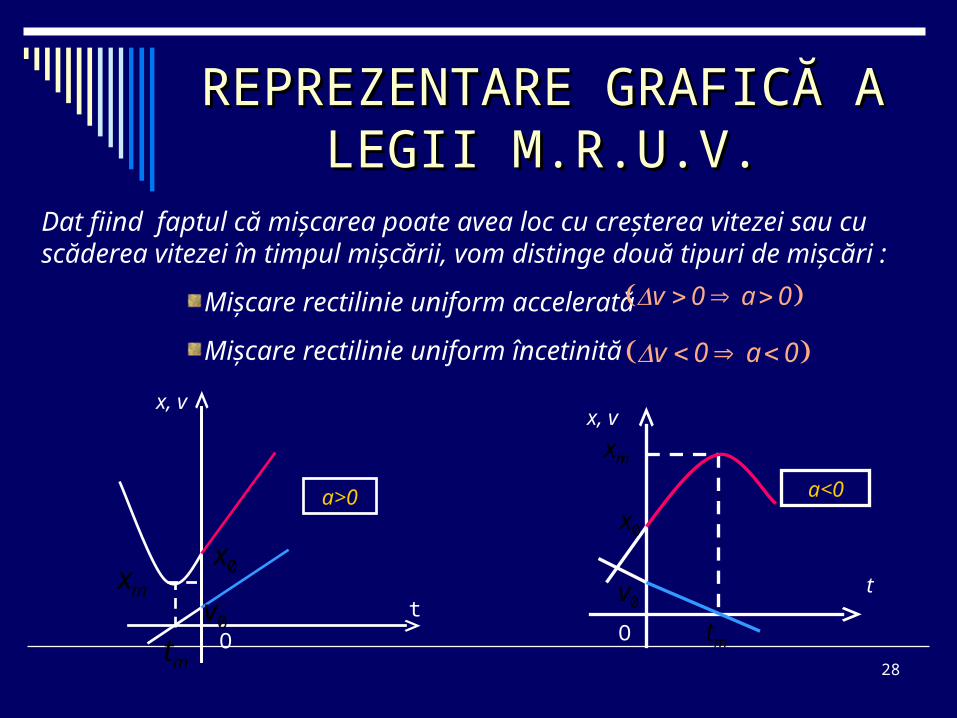
REPREZENTARE REPREZENTARE GRAFICĂ A LEGII GRAFICĂ A LEGII
M.R.U.V.M.R.U.V.Dat fiind faptul că mişcarea poate avea loc cu creşterea vitezei sau cu scăderea vitezei în timpul mişcării, vom distinge două tipuri de mişcări :
Mişcare rectilinie uniform accelerată
Mişcare rectilinie uniform încetinită v 0 a 0
v 0 a 0
O
29
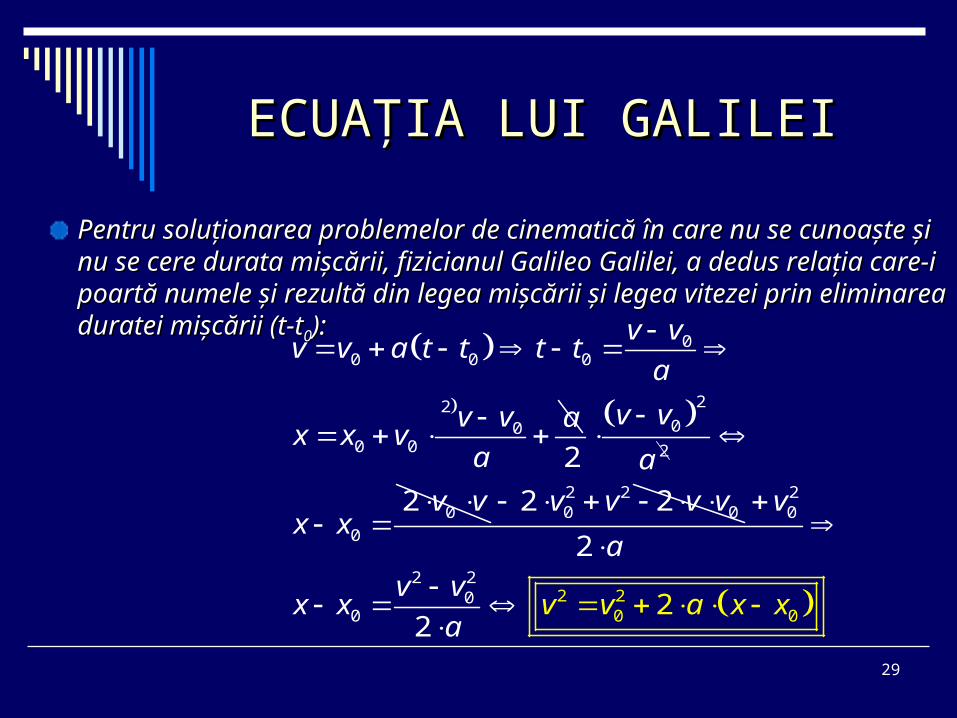
ECUAECUAŢIA LUI GALILEIŢIA LUI GALILEI
Pentru soluţionarea problemelor de cinematică în care nu se Pentru soluţionarea problemelor de cinematică în care nu se cunoaşte şi nu se cere durata mişcării, fizicianul Galileo Galilei, cunoaşte şi nu se cere durata mişcării, fizicianul Galileo Galilei, a dedus relaţia care-i poartă numele şi rezultă din legea a dedus relaţia care-i poartă numele şi rezultă din legea mişcării şi legea vitezei prin eliminarea duratei mişcării (t-tmişcării şi legea vitezei prin eliminarea duratei mişcării (t-t00):):
00 0 0
20
0 0
v vv v a t t t t
a
v v ax x v
a
20
22
v v
a
0
0
2 v vx x
2 20 02 2v v v v
2 20
20
2
0 0
20
2
22
v
a
v vx v a x
av xx


















