
Capitolul 2 Caracteristici fundamentale ale reţelelor neurale...
24
Capitolul 2 Caracteristici fundamentale ale reţelelor neurale artificiale 2.1 Modele pentru neuronul elementar 2.2 Arhitecturi specifice 2.3 Algoritmi de învăţare
Transcript of Capitolul 2 Caracteristici fundamentale ale reţelelor neurale...
Capitolul 2 Caracteristici fundamentale ale reţelelor neurale artificiale
2.1 Modele pentru neuronul elementar2.2 Arhitecturi specifice
2.3 Algoritmi de învăţare
22 CAPITOLUL 2: CARACTERISTICI FUNDAMENTALE
Reţelele neurale artificiale sunt caracterizate de 3 elemente: modelul adoptat pentru elementul de procesare individual (neuronul), structura particulară de interconexiuni (arhitectura) şi mecanismul de ajustare a legăturilor dintre neuroni (algoritmul de învăţare). În cele ce urmează vom trece în revistă pe rând aceste elemente, prezentând exemple semnificative şi introducând terminologia corespunzătoare. 2.1 Modele pentru neuronul elementar
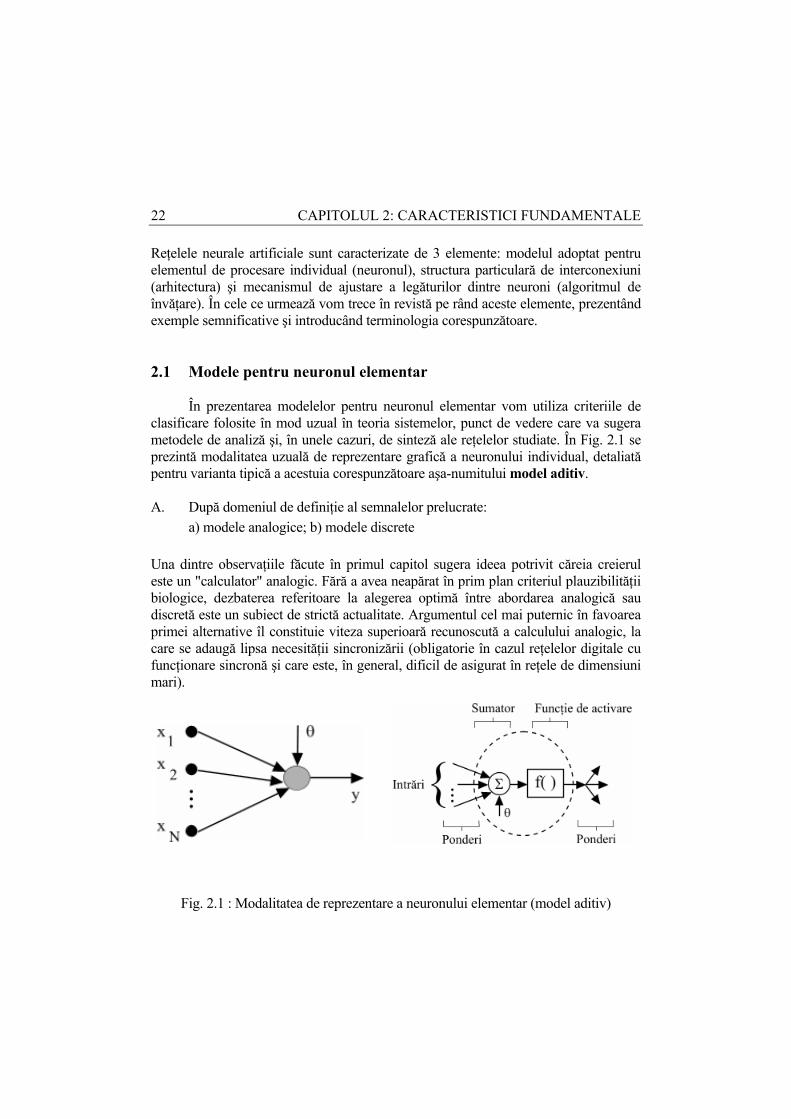
În prezentarea modelelor pentru neuronul elementar vom utiliza criteriile de clasificare folosite în mod uzual în teoria sistemelor, punct de vedere care va sugera metodele de analiză şi, în unele cazuri, de sinteză ale reţelelor studiate. În Fig. 2.1 se prezintă modalitatea uzuală de reprezentare grafică a neuronului individual, detaliată pentru varianta tipică a acestuia corespunzătoare aşa-numitului model aditiv. A. După domeniul de definiţie al semnalelor prelucrate:
a) modele analogice; b) modele discrete Una dintre observaţiile făcute în primul capitol sugera ideea potrivit căreia creierul este un "calculator" analogic. Fără a avea neapărat în prim plan criteriul plauzibilităţii biologice, dezbaterea referitoare la alegerea optimă între abordarea analogică sau discretă este un subiect de strictă actualitate. Argumentul cel mai puternic în favoarea primei alternative îl constituie viteza superioară recunoscută a calculului analogic, la care se adaugă lipsa necesităţii sincronizării (obligatorie în cazul reţelelor digitale cu funcţionare sincronă şi care este, în general, dificil de asigurat în reţele de dimensiuni mari).
Fig. 2.1 : Modalitatea de reprezentare a neuronului elementar (model aditiv)
2.1 Modele pentru neuronul elementar 23
Avantajele abordării discrete rezidă în principal în precizia calculelor, importantă mai ales în cazurile în care parametrii reţelei sunt supuşi unor restricţii severe, de exemplu referitoare la condiţii de simetrie. Posibilitatea stocării pe durate mari de timp în formă nealterată a unor valori numerice utile reprezintă de asemenea un avantaj. Un aspect fundamental legat de implementarea reţelelor digitale îl constituie determinarea rezoluţiei necesare (a numărului de biţi pe care se reprezintă valorile numerice) într-o aplicaţie dată. O distincţie suplimentară se poate face în raport cu gradul de cuantizare a semnalelor prelucrate. Se folosesc atât semnale necuantizate cât şi semnale cuantizate, de obicei binare1. Este important de subliniat că modelul discret nu presupune neapărat implementare digitală, ci poate fi folosită şi varianta care utilizează mărimi discrete necuantizate, folosind circuite cu capacităţi comutate. B. După natura datelor prelucrate:
a) modele reale; b) modele complexe În marea majoritate a cazurilor mărimile prelucrate sunt reale, dar în ultimul timp se utilizează şi reţele care lucrează cu variabile complexe sau, mai general, hipercomplexe2. Această alegere este justificată cu precădere în aplicaţii în care datele de intrare au o natură complexă intrinsecă (de exemplu, semnale radar sau unele semnale folosite în transmisiuni de date), precum şi de numărul mai redus de parametri necesari faţă de varianta reală. Algoritmii de învăţare sunt, de regulă, extensii naturale ale variantelor formulate pentru semnale reale, însă atenţie specială trebuie acordată în acest caz alegerii funcţiei de activare, în particular caracterului analitic al acesteia. 1 Există exemple de reţele neurale care prelucrează semnale având mai multe nivele de cuantizare, care pot proveni din utilizarea unor funcţii de activare multinivel [92] sau pot avea intrinsec un asemenea caracter, ca în cazul utilizării unor coduri multinivel (de exemplu, ternare) în transmisiuni de date.
2 Numerele hipercomplexe generalizează noţiunea uzuală de număr complex. Un exemplu îl constituie quaternionii [71], care se pot scrie sub forma: z = z0+z1i+z2j+z3k, unde i, j, k reprezintă cei trei vectori spaţiali ortogonali, iar z0-z3 sunt parametri reali.
24 CAPITOLUL 2: CARACTERISTICI FUNDAMENTALE
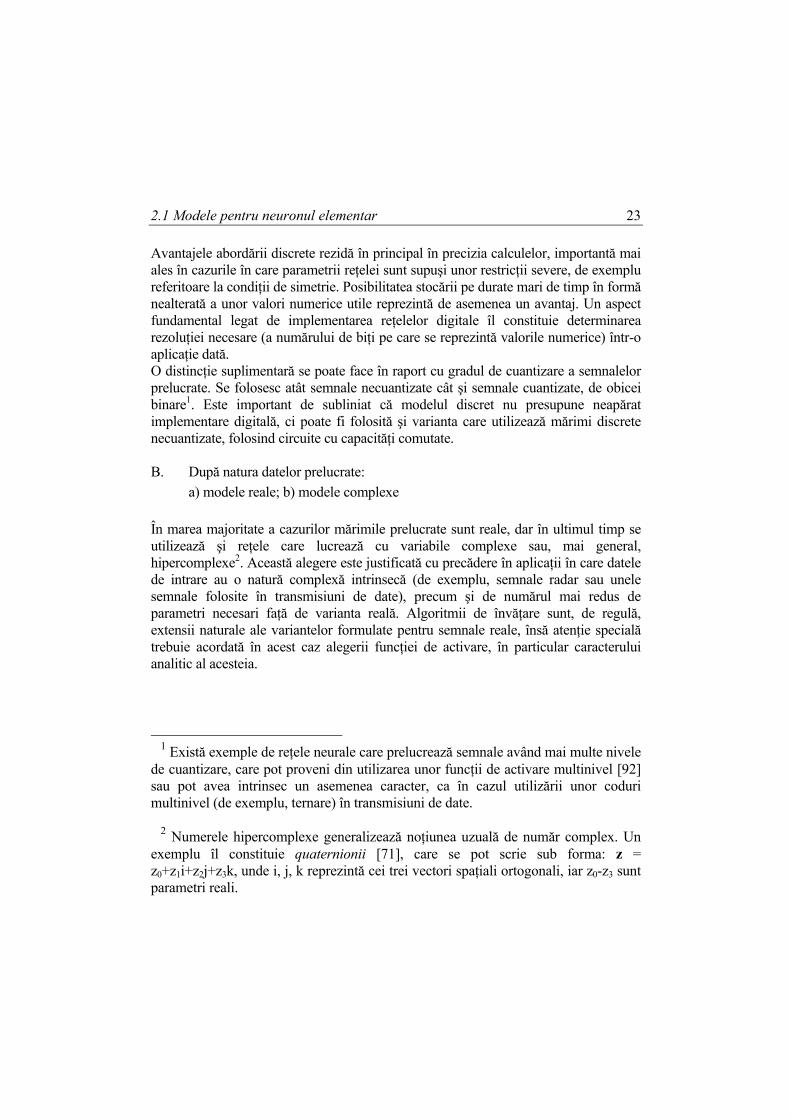
Fig. 2.2: Funcţii de activare pentru neuronul elementar:
a) comparator bipolar; b) comparator unipolar; c) comparator bipolar cu prag; d) liniar cu saturaţie; e) sigmoidală bipolară; f) sigmoidală unipolară
C. După tipul funcţiei de activare:
a) modele liniare; b) modele neliniare Funcţia de activare reprezintă funcţia de transfer intrare-ieşire a neuronului elementar. De departe, majoritatea reţelelor neurale artificiale întâlnite în literatură utilizează modele neliniare. Excepţia notabilă o constituie reţeaua de tip Adaline (prescurtare de la ADAptive LInear NEuron) şi varianta sa multidimensională Madaline, propuse de către profesorul american Bernard Widrow de la Universitatea Stanford [177]. Avantajul acestora îl constituie gama largă de algoritmi de învăţare performanţi existenţi, dar aria de aplicabilitate a reţelelor neurale care utilizează modele liniare este relativ restrânsă (egalizarea liniară a canalelor de transmisiuni de date, clasificatoare liniare). În Fig. 2.2 se prezintă câteva dintre funcţiile de activare des utilizate. Se pot face o serie de observaţii interesante: • modelul de tip comparator (Fig. 2.2 a,b) poate fi întâlnit atât în reţele analogice cât şi în cele discrete • modelul de tip comparator cu prag (Fig. 2.2 c) poate fi înlocuit cu un model fără prag dacă valoarea de prag θ se tratează ca o intrare distinctă de valoare constantă egală cu (-1) conectată printr-o legătură (pondere) care se va modifica în timp sub acţiunea algoritmului de învăţare
2.1 Modele pentru neuronul elementar 25
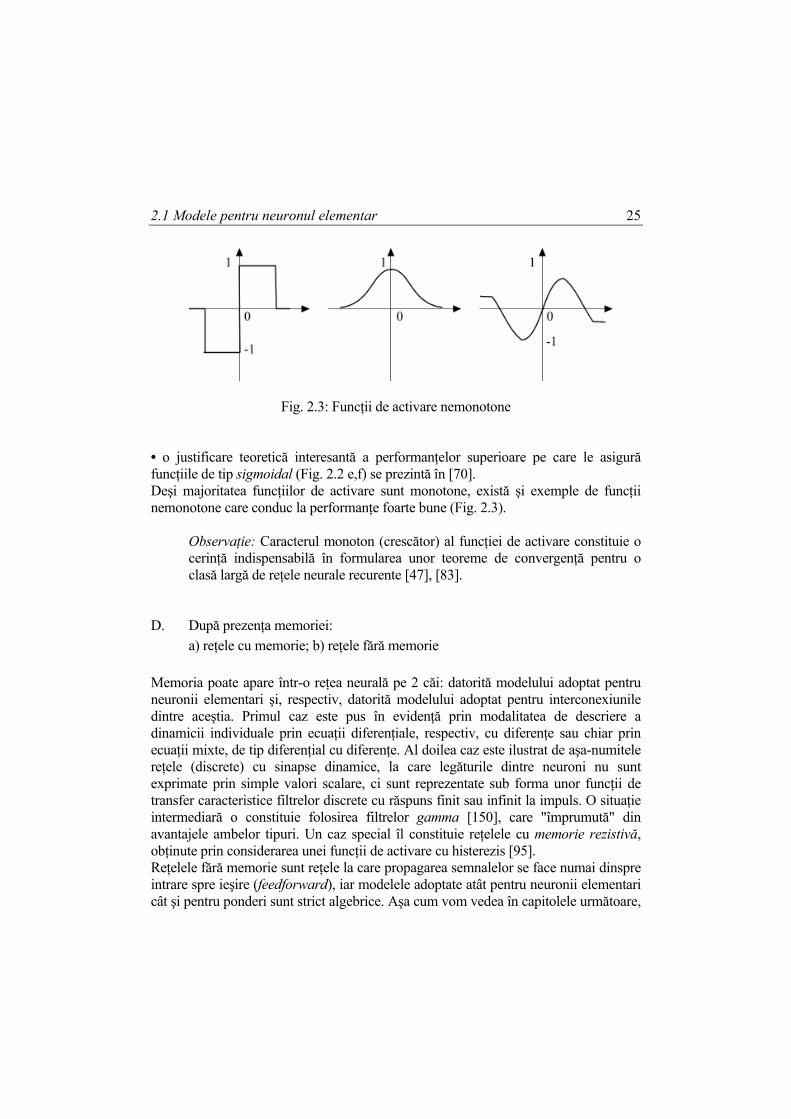
Fig. 2.3: Funcţii de activare nemonotone
• o justificare teoretică interesantă a performanţelor superioare pe care le asigură funcţiile de tip sigmoidal (Fig. 2.2 e,f) se prezintă în [70]. Deşi majoritatea funcţiilor de activare sunt monotone, există şi exemple de funcţii nemonotone care conduc la performanţe foarte bune (Fig. 2.3).
Observaţie: Caracterul monoton (crescător) al funcţiei de activare constituie o cerinţă indispensabilă în formularea unor teoreme de convergenţă pentru o clasă largă de reţele neurale recurente [47], [83].
D. După prezenţa memoriei:
a) reţele cu memorie; b) reţele fără memorie Memoria poate apare într-o reţea neurală pe 2 căi: datorită modelului adoptat pentru neuronii elementari şi, respectiv, datorită modelului adoptat pentru interconexiunile dintre aceştia. Primul caz este pus în evidenţă prin modalitatea de descriere a dinamicii individuale prin ecuaţii diferenţiale, respectiv, cu diferenţe sau chiar prin ecuaţii mixte, de tip diferenţial cu diferenţe. Al doilea caz este ilustrat de aşa-numitele reţele (discrete) cu sinapse dinamice, la care legăturile dintre neuroni nu sunt exprimate prin simple valori scalare, ci sunt reprezentate sub forma unor funcţii de transfer caracteristice filtrelor discrete cu răspuns finit sau infinit la impuls. O situaţie intermediară o constituie folosirea filtrelor gamma [150], care "împrumută" din avantajele ambelor tipuri. Un caz special îl constituie reţelele cu memorie rezistivă, obţinute prin considerarea unei funcţii de activare cu histerezis [95]. Reţelele fără memorie sunt reţele la care propagarea semnalelor se face numai dinspre intrare spre ieşire (feedforward), iar modelele adoptate atât pentru neuronii elementari cât şi pentru ponderi sunt strict algebrice. Aşa cum vom vedea în capitolele următoare,

26 CAPITOLUL 2: CARACTERISTICI FUNDAMENTALE
pentru astfel de reţele există algoritmi de antrenare foarte puternici, de exemplu cei din categoria backpropagation (cu propagare inversă a erorii). Este important să subliniem că există exemple de reţele de tip feedforward cu reacţie locală, utilizate mai ales în aplicaţii de prelucrare de semnale vocale. Unii autori identifică o aşa-numită memorie pe termen scurt (short-time memory), reprezentată de valorile variabilelor de stare ale sistemului şi o memorie pe termen lung (long time memory), dată de valorile interconexiunilor. Din punctul de vedere al implementării, reţelele recurente ridică probleme speciale legate de necesitatea stocării unui volum mare de informaţii pe perioade însemnate de timp şi de elaborarea unor algoritmi de învăţare suficient de rapizi pentru aplicaţii în timp real. E. După dimensiunea spaţiului stărilor pentru neuronul individual:
a) modele de ordinul I; b) modele de ordin superior În cazul reţelelor feedforward, modelele considerate pentru neuronul elementar sunt de obicei de ordinul I şi se încadrează în aşa-numitul tip aditiv, potrivit căruia acesta efectuează o prelucrare în general neliniară asupra sumei ponderate a semnalelor aplicate la intrare (mărime care defineşte activarea neuronului):
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛∑ xw f = y(x) iiN
1=i
(2. 1)
Au fost propuse şi modele de ordin superior, capabile să confere reţelelor formate din astfel de neuroni capacitatea de a surprinde corelaţii mai complexe ale datelor prelucrate, în particular posibilitatea de a asigura invarianţa răspunsului reţelei la semnale de intrare obţinute prin transformări elementare (translaţie, rotaţie) ale bazei de date originale. Exemplele cele mai cunoscute din acestă categorie sunt modelul sigma-pi [157] şi cel propus de către Giles şi Maxwell, bazat pe relaţia [66]:
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛∑∑∑ ... +xxw+xw f = y(x) jiij
jiii
i
(2. 2)
În ceea ce priveşte reţelele neurale recurente, analogice sau discrete, acestea sunt descrise de una din ecuaţiile:

2.1 Modele pentru neuronul elementar 27
[0] , [k],( F = 1]+[k (0)) , (t),( F = (t)
W
WXuXX
XuXX
(2. 3)
unde matricea de interconexiuni W este determinată de aplicaţia concretă, vectorul X reuneşte variabilele de stare ale sistemului, u semnifică semnalul de intrare, iar X(0), X[0] desemnează condiţiile iniţiale. În cele mai multe modele prezentate în literatură neuronul individual este descris de o ecuaţie diferenţială sau cu diferenţe de ordinul I, exemplul tipic fiind oferit de reţeaua Hopfield [83]:
⎟⎠⎞
⎜⎝⎛∑
∑
[n]x w f =1] +[nx
)xf( w+x- = x
jij
N
j=1i
jij
N
j=1ii
(2. 4)
unde N este numărul total de neuroni din sistem. Recent au fost propuse şi modele de ordin superior pentru neuronii individuali, care utilizează în general oscilatoare pe post de elemente de procesare elementare. Un exemplu în acest sens îl reprezintă modelul de ordinul II introdus în [75]:
( )xK f+y- = y
au+yK-xw f+x- = x
iiii
iiijijN
1=jii
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛∑
(2. 5)
unde f(x) = (2/π)tan-1 (x/a), iar a, Ki sunt constante reale. Mai mult, în [2] şi [5] se introduc modele de ordinul III, care prezintă particularitatea de a prezenta evoluţie haotică chiar la nivelul unui neuron individual, cu efect favorabil în unele aplicaţii. Deşi sunt mai bine motivate din punct de vedere biologic, modelele de ordin superior sunt mai dificil de analizat şi sintetizat la nivel de sistem, iar în unele aplicaţii rezultatele nu sunt mult mai bune faţă de varianta de ordinul I.
28 CAPITOLUL 2: CARACTERISTICI FUNDAMENTALE
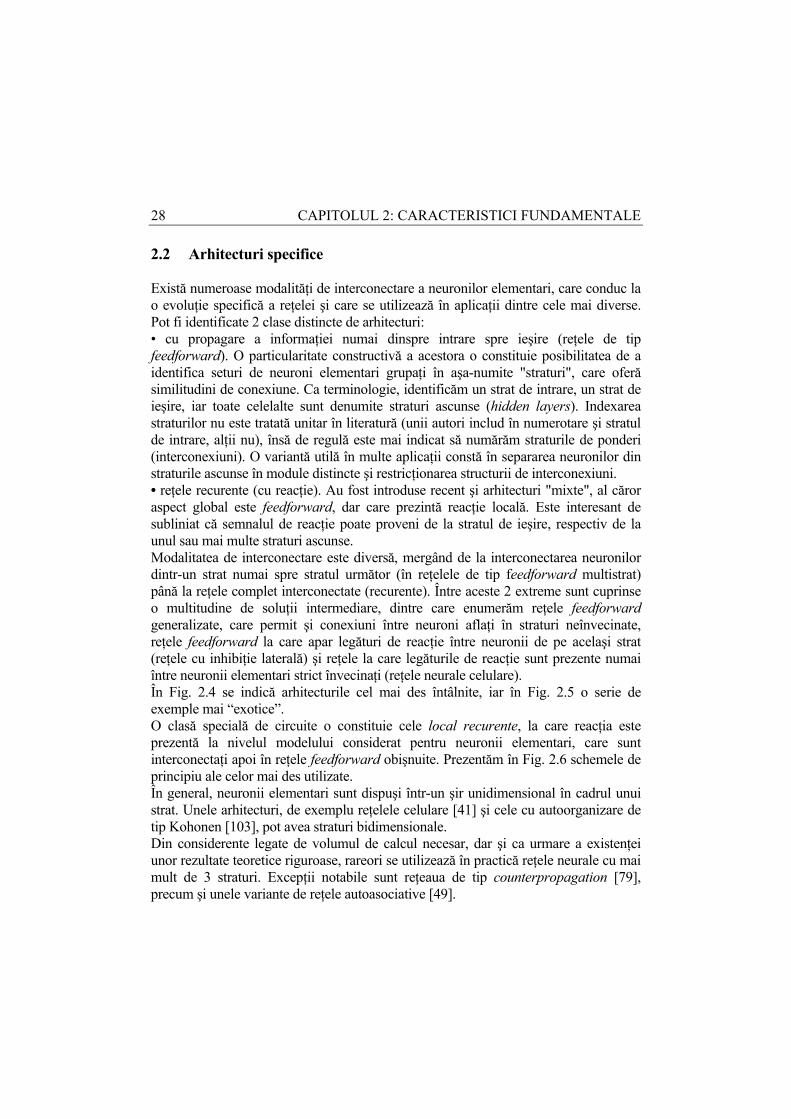
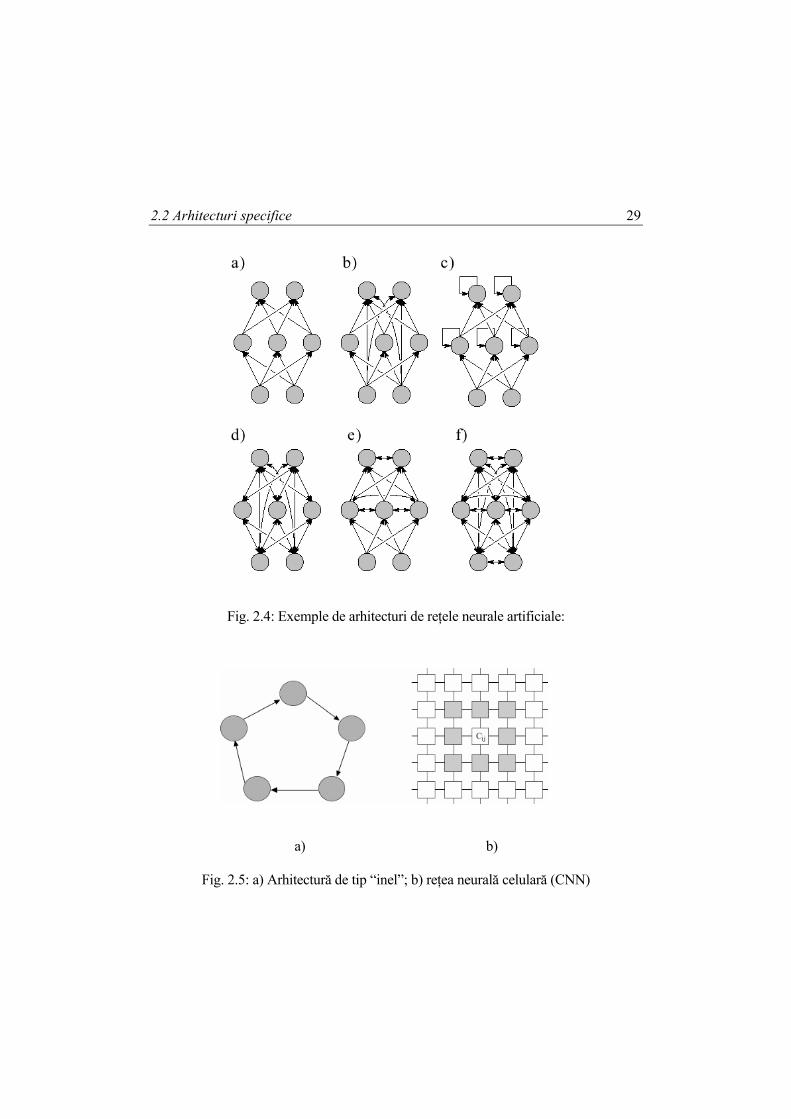
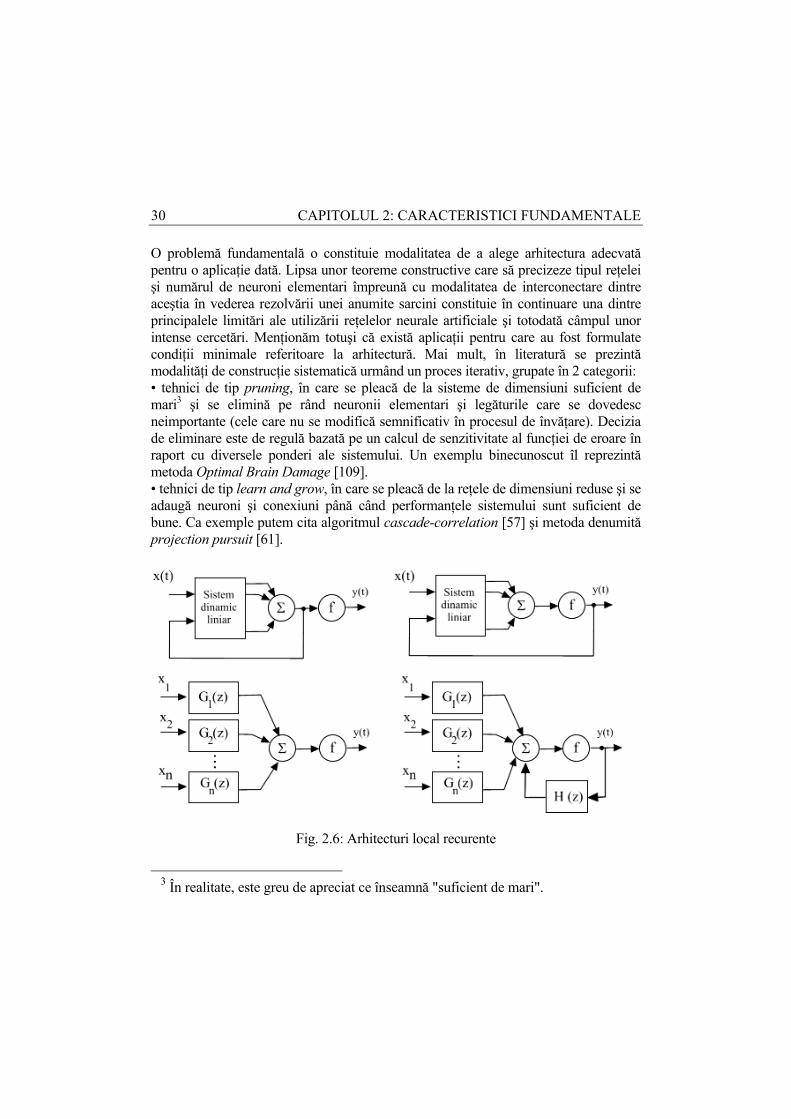
2.2 Arhitecturi specifice Există numeroase modalităţi de interconectare a neuronilor elementari, care conduc la o evoluţie specifică a reţelei şi care se utilizează în aplicaţii dintre cele mai diverse. Pot fi identificate 2 clase distincte de arhitecturi: • cu propagare a informaţiei numai dinspre intrare spre ieşire (reţele de tip feedforward). O particularitate constructivă a acestora o constituie posibilitatea de a identifica seturi de neuroni elementari grupaţi în aşa-numite "straturi", care oferă similitudini de conexiune. Ca terminologie, identificăm un strat de intrare, un strat de ieşire, iar toate celelalte sunt denumite straturi ascunse (hidden layers). Indexarea straturilor nu este tratată unitar în literatură (unii autori includ în numerotare şi stratul de intrare, alţii nu), însă de regulă este mai indicat să numărăm straturile de ponderi (interconexiuni). O variantă utilă în multe aplicaţii constă în separarea neuronilor din straturile ascunse în module distincte şi restricţionarea structurii de interconexiuni. • reţele recurente (cu reacţie). Au fost introduse recent şi arhitecturi "mixte", al căror aspect global este feedforward, dar care prezintă reacţie locală. Este interesant de subliniat că semnalul de reacţie poate proveni de la stratul de ieşire, respectiv de la unul sau mai multe straturi ascunse. Modalitatea de interconectare este diversă, mergând de la interconectarea neuronilor dintr-un strat numai spre stratul următor (în reţelele de tip feedforward multistrat) până la reţele complet interconectate (recurente). Între aceste 2 extreme sunt cuprinse o multitudine de soluţii intermediare, dintre care enumerăm reţele feedforward generalizate, care permit şi conexiuni între neuroni aflaţi în straturi neînvecinate, reţele feedforward la care apar legături de reacţie între neuronii de pe acelaşi strat (reţele cu inhibiţie laterală) şi reţele la care legăturile de reacţie sunt prezente numai între neuronii elementari strict învecinaţi (reţele neurale celulare). În Fig. 2.4 se indică arhitecturile cel mai des întâlnite, iar în Fig. 2.5 o serie de exemple mai “exotice”. O clasă specială de circuite o constituie cele local recurente, la care reacţia este prezentă la nivelul modelului considerat pentru neuronii elementari, care sunt interconectaţi apoi în reţele feedforward obişnuite. Prezentăm în Fig. 2.6 schemele de principiu ale celor mai des utilizate. În general, neuronii elementari sunt dispuşi într-un şir unidimensional în cadrul unui strat. Unele arhitecturi, de exemplu reţelele celulare [41] şi cele cu autoorganizare de tip Kohonen [103], pot avea straturi bidimensionale. Din considerente legate de volumul de calcul necesar, dar şi ca urmare a existenţei unor rezultate teoretice riguroase, rareori se utilizează în practică reţele neurale cu mai mult de 3 straturi. Excepţii notabile sunt reţeaua de tip counterpropagation [79], precum şi unele variante de reţele autoasociative [49].
2.2 Arhitecturi specifice 29
Fig. 2.4: Exemple de arhitecturi de reţele neurale artificiale:
a) b)
Fig. 2.5: a) Arhitectură de tip “inel”; b) reţea neurală celulară (CNN)
30 CAPITOLUL 2: CARACTERISTICI FUNDAMENTALE
O problemă fundamentală o constituie modalitatea de a alege arhitectura adecvată pentru o aplicaţie dată. Lipsa unor teoreme constructive care să precizeze tipul reţelei şi numărul de neuroni elementari împreună cu modalitatea de interconectare dintre aceştia în vederea rezolvării unei anumite sarcini constituie în continuare una dintre principalele limitări ale utilizării reţelelor neurale artificiale şi totodată câmpul unor intense cercetări. Menţionăm totuşi că există aplicaţii pentru care au fost formulate condiţii minimale referitoare la arhitectură. Mai mult, în literatură se prezintă modalităţi de construcţie sistematică urmând un proces iterativ, grupate în 2 categorii: • tehnici de tip pruning, în care se pleacă de la sisteme de dimensiuni suficient de mari3 şi se elimină pe rând neuronii elementari şi legăturile care se dovedesc neimportante (cele care nu se modifică semnificativ în procesul de învăţare). Decizia de eliminare este de regulă bazată pe un calcul de senzitivitate al funcţiei de eroare în raport cu diversele ponderi ale sistemului. Un exemplu binecunoscut îl reprezintă metoda Optimal Brain Damage [109]. • tehnici de tip learn and grow, în care se pleacă de la reţele de dimensiuni reduse şi se adaugă neuroni şi conexiuni până când performanţele sistemului sunt suficient de bune. Ca exemple putem cita algoritmul cascade-correlation [57] şi metoda denumită projection pursuit [61].
Fig. 2.6: Arhitecturi local recurente
3 În realitate, este greu de apreciat ce înseamnă "suficient de mari".

2.3 Algoritmi de învăţare 31
2.3 Algoritmi de învăţare Unul dintre aspectele care diferenţiază reţelele neurale faţă de alte sisteme de prelucrare a informaţiei îl constituie capacitatea acestora de a învăţa în urma interacţiunii cu mediul înconjurător şi, ca urmare, de a-şi îmbunătăţi în timp performanţele (conform unui criteriu precizat). Deşi nu există o definiţie general acceptată a procesului de învăţare, prezentăm mai jos pe cea din [76]:
Învăţarea este un proces prin care parametrii unei reţele neurale se adaptează în urma interacţiunii continue cu mediul de lucru. Tipul mecanismului de învăţare este determinat de modalitatea concretă prin care se produce ajustarea valorilor parametrilor sistemului.
Un aspect fundamental îl constituie modul de reprezentare internă a informaţiilor care să permită interpretarea, predicţia şi răspunsul corect la un stimul provenit din mediul înconjurător. O reprezentare corectă îi va permite sistemului, în particular reţelei neurale, să construiască un model al procesului analizat în stare să se comporte satisfăcător în condiţiile în care la intrare i se vor aplica stimuli care nu au fost utilizaţi în procesul prealabil de învăţare. Informaţiile utilizate în etapa de învăţare (şi deci de sinteză a reţelei) sunt de 2 tipuri: • informaţii disponibile a priori referitoare la particularităţile şi, eventual, restricţiile cărora le este supusă aplicaţia considerată. Astfel de considerente conduc, în general, la sisteme specializate de dimensiuni reduse, mai uşor de antrenat şi mai ieftine. • informaţii sub forma unor perechi intrare-ieşire care surprind o relaţie de tip cauză-efect. Setul de date disponibil se împarte în două părţi, una fiind folosită în procesul de modificare a ponderilor, deci de învăţare propriu-zisă, iar cealaltă pentru a testa performanţele sistemului rezultat, oferind o imagine a aşa-numitei capacităţi de generalizare a reţelei. Procesul de reprezentare internă respectă câteva reguli de bază, care sunt enumerate în continuare [8]: Regula 1: Date de intrare similare trebuie să capete reprezentări interne asemănătoare. Există mai multe moduri de a măsura "asemănarea" dintre 2 intrări distincte. Cea mai des folosită este cea bazată pe distanţa Euclidiană dintre intrări (văzute ca vectori reali multidimensionali). Uneori se utilizează produsul scalar sau funcţia de intercorelaţie dintre cele 2 mărimi.
32 CAPITOLUL 2: CARACTERISTICI FUNDAMENTALE
Regula 2: Intrări aparţinând unor categorii distincte trebuie să aibă reprezentări interne cât mai diferite. Regula 3: În reprezentarea internă a unei caracteristici importante a datelor de intrare trebuie să fie implicaţi un număr mare de neuroni elementari. Această regulă asigură un grad mare de încredere în luarea unei decizii şi toleranţă sporită în cazul funcţionării incorecte a unora dintre neuronii implicaţi în reprezentare. Regula 4: Orice informaţie disponibilă a priori, precum şi eventuale invarianţe trebuie folosite în etapa de configurare (stabilirea arhitecturii şi a modului de interconectare) a reţelei. Această indicaţie favorizează funcţionarea corectă a reţelei deoarece aceasta nu trebuie să mai înveţe particularităţile specifice aplicaţiei considerate. Sistemele rezultate sunt în general specializate, având dimensiuni reduse, sunt mai uşor de implementat şi mai ieftine. Modalităţile de reprezentare a invarianţelor în raport cu diverse transformări elementare în reţele neurale se prezintă în [16]. 2.3.1 Criterii de clasificare a algoritmilor de învăţare Există mai multe criterii în funcţie de care se pot clasifica algoritmii de învăţare, dintre care amintim: A. În funcţie de disponibilitatea răspunsului dorit la ieşirea reţelei neurale:
a) învăţare supravegheată; b) învăţare nesupravegheată; c) învăţare folosind un “critic”
• învăţarea supravegheată (supervised learning) presupune existenţa în orice moment a unei valori dorite (target) a fiecărui neuron din stratul de ieşire al reţelei. Sistemului i se furnizează seturi de perechi intrare-ieşire dorită cu ajutorul cărora se calculează mărimi de eroare în funcţie de diferenţa dintre valoarea reală a ieşirii şi cea dorită, pe baza cărora se ajustează valorile parametrilor reţelei (interconexiuni şi, eventual, valori de prag ale funcţiilor de activare). Exemple tipice: a) pentru reţele feedforward: algoritmul LMS (Least Mean Square) [176], clasa de algoritmi back-propagation (cu propagare inversă a erorii) [77], cuantizarea vectorială cu învăţare

2.3 Algoritmi de învăţare 33
(LVQ) [103]; b) pentru reţele recurente: backpropagation-through-time [174], real-time recurrent learning [179]. • în învăţarea nesupravegheată (unsupervised learning) reţeaua extrage singură anumite caracteristici importante ale datelor de intrare formând reprezentări interne distincte ale acestora. Reţeaua nu beneficiază de seturi de ieşiri dorite, în schimb se utilizează un gen de "competiţie" între neuronii elementari care are ca efect modificarea conexiunilor aferente numai neuronului care "câştigă" întrecerea, restul legăturilor rămânând neafectate. Exemple din această categorie sunt: a) pentru reţele feedforward: counterpropagation [79]; b) pentru reţele recurente: algoritmul propus de Kohonen pentru hărţile cu autoorganizare (SOM) [103], algoritmul Hebb [78], Teoria Rezonanţei Adaptive (ART) elaborate de Grossberg [70]. În unele modele apare un parametru denumit intuitiv "conştiinţă" care intră în funcţiune atunci când unul dintre neuroni câştigă prea des competiţia. • învăţarea folosind un "critic" (reinforcement learning) este denumită uneori şi cu recompensă/pedeapsă (reward/punishment). În această situaţie, reţeaua nu beneficiază de un semnal dorit, ca în cazul învăţării supravegheate, ci de un semnal care oferă o informaţie calitativă ilustrând cât de bine funcţionează sistemul (informaţia este binară, de tipul “răspunsul este bun/greşit”, însă nu se indică şi cât de bun/greşit). Algoritmii aparţinând acestei categorii sunt inspiraţi într-o mai mare măsură de observaţii experimentale făcute pe animale şi, în esenţă, funcţionează după următorul principiu [76]: dacă urmarea unei anumite acţiuni întreprinse de un sistem capabil să înveţe are un efect favorabil, tendinţa de a produce acţiunea respectivă este încurajată, în caz contrar este inhibată. În general algoritmii de învăţare respectă următoarea regulă [76]: vectorul multidimensional al ponderilor (interconexiunilor) aferente unui neuron elementar Wi se modifică proporţional cu produsul scalar dintre vectorul mărimilor de intrare x şi un aşa-numit "vector de învăţare" r, reprezentat în general de o funcţie dependentă de Wi, x şi, eventual, de vectorul ieşirilor dorite d: ) , ,( = dxWrr (2. 6)
Valoarea ponderilor se modifică după o relaţie de forma: xrW η = ∆ (2. 7)
unde η este o constantă reală, de obicei subunitară, denumită constantă de învăţare.
34 CAPITOLUL 2: CARACTERISTICI FUNDAMENTALE
B. În funcţie de existenţa unui model analitic: a) algoritmi parametrici; b) algoritmi neparametrici Algoritmii parametrici presupun că procesul analizat poate fi modelat sub forma unei expresii matematice având o formă cunoscută, dependente de un număr (în general, restrâns) de parametri. Scopul urmărit în acest caz constă în estimarea cât mai exactă a valorilor acestor parametri pe baza datelor intrare-ieşire disponibile. În cazul în care modelul considerat nu este adecvat, calitatea aproximării poate fi nesatisfăcătoare. În această situaţie sunt de preferat algoritmii neparametrici, care nu impun constrângeri de modelare. Astfel de algoritmi sunt capabili să aproximeze orice dependenţă intrare-ieşire, oricât de complicată, în virtutea unei aşa-numite capacităţi de aproximare universală pe care o posedă unii dintre aceştia. C. În funcţie de tipul aplicaţiei pentru care sunt utilizaţi: a) regresie; b) clasificare Categoria cea mai răspândită de aplicaţii în care sunt utilizate reţelele neurale este cea de aproximare funcţională, în care se modelează dependenţe dintre un set de variabile de intrare şi una sau mai multe variabile de ieşire. Setul de parametri care “traduc” această dependenţă este constituit din valorile interconexiunilor dintre neuroni, denumite de regulă ponderi sau sinapse. În modul cel mai general, o reţea neurală poate fi privită ca un mod particular de a stabili forma acestei dependenţe, împreună cu modalitatea concretă de a fixa valorile parametrilor corespunzători folosind baza de date disponibilă. Se pot distinge 2 categorii majore de aplicaţii: a) în clasificare se urmăreşte alocarea datelor aplicate la intrarea reţelei a uneia dintre “etichetele” corespunzătoare unui set discret de categorii avute la dispoziţie (de exemplu, unei imagini reprezentând un caracter scris de mână i se asociază una dintre cele 26 de litere ale alfabetului). Din punct de vedere statistic, se urmăreşte de fapt aproximarea cât mai exactă a probabilităţii de apartenenţă a datelor de intrare la una dintre categoriile existente; b) în cazul în care ieşirea reţelei poate avea valori continue avem de-a face cu o problemă de regresie, al cărei scop este aproximarea unei aşa-numite funcţii de regresie (definită printr-o operaţie de mediere aritmetică a unei mărimi statistice specifice, ce va fi prezentată pe larg într-unul dintre paragrafele următoare). Regresia liniară este binecunoscută în analiza statistică, însă există aplicaţii practice importante (de exemplu, aplicaţiile financiare) în care rezultatele obţinute sunt nesatisfăcătoare, fiind necesară introducerea unui model neliniar.

2.3 Algoritmi de învăţare 35
În alegerea unui algoritm de învăţare trebuie avute în vedere şi unele considerente de ordin practic, precum necesarul de memorie, viteza de convergenţă, complexitatea calculelor, comportarea în faza de testare. În Tabelul 2.1 se prezintă caracteristicile principalilor algoritmi de învăţare, care vor fi trataţi pe larg în capitolele următoare. Tabelul 2.1: Principalele tipuri de algoritmi de învăţare
Caracteristici Denumire Param. (P)/ Neparam. (N)
Clasificare (C)/ Regresie (R) Necesar de
memorie Viteză
Regresie liniară P R Foarte scăzut Rapid Backpropagation N R Scăzut Lent Filtru Kalman P R Ridicat Rapid LM N R Mediu Rapid K-means N C Mediu Mediu Projection pursuit
N R Scăzut Mediu
SOM N C Scăzut Mediu LVQ N C Medu Lent Bayesian N C Scăzut Rapid
Legenda: LM – Levenberg-Marquardt; SOM – Self-Organizing Map; LVQ – Learning Vector Quantization Să notăm în final cele 2 puncte de vedere distincte asupra procesului de învăţare care se pot identifica analizând arhitecturile întâlnite în literatură, care explică în acelaşi timp şi capacitatea de generalizare a acestora: • reţelele de tip feedforward tratează învăţarea ca pe o problemă de aproximare a unei funcţii de mai multe variabile (reale sau complexe) care exprimă legătura (necunoscută) dintre intrarea şi ieşirea sistemului pe baza unui set finit de exemple de tip intrare-ieşire dorită. O importanţă deosebită o are dimensiunea bazei de date folosite în antrenare, aflată în strânsă dependenţă de numărul total de parametri ai reţelei (ponderi şi, eventual, valori de prag ale funcţiei de activare) şi care are un efect semnificativ asupra erorii de aproximare [19]. Necesitatea de a beneficia de o bază de date extrem de mare în cazul unor reţele cu mulţi neuroni şi/sau straturi a fost denumită intuitiv "blestem al dimensionalităţii" (curse of dimensionality). De asemenea, este recunoscut pericolul de supraantrenare (overfitting), care constă în posibilitatea ca reţeaua să memoreze înseşi datele folosite în etapa de antrenare (în
36 CAPITOLUL 2: CARACTERISTICI FUNDAMENTALE
general, însoţite de zgomot) şi nu să construiască un model al sistemului care le-a generat. În privinţa capacităţii reţelelor feedforward de a aproxima funcţii neliniare oarecare au fost elaborate analize teoretice extrem de riguroase, care pun în evidenţă proprietatea de aproximare universală a unor reţele cu funcţii de activare monotone de tip sigmoidal [52], [85] sau nemonotone de tip gaussian [139]. Au fost studiate şi condiţiile în care astfel de sisteme permit aproximarea simultană atât a funcţiei cât şi a derivatelor acesteia [86] şi au fost formulate estimări ale erorilor de aproximare. Reţelele de tip feedforward au fost utilizate cu succes în aplicaţii de clasificare, identificare de sistem, analiză a seriilor de timp. • reţelele recurente codează informaţia sub forma mulţimilor limită ale unor sisteme dinamice neliniare multidimensionale [81]. Mulţimile limită (care, în mod intuitiv, reprezintă generalizarea noţiunii de regim permanent din cazul sistemelor liniare) conduc la unul dintre următoarele 4 tipuri de reprezentări în spaţiul stărilor: stări de echilibru stabil, cicluri limită corespunzătoare unor regimuri dinamice periodice, atractori specifici unor regimuri cvasiperiodice (de exemplu, cu aspect toroidal) şi atractori stranii, care pun în evidenţă prezenţa regimului de funcţionare haotic. În cele mai multe situaţii se utilizează sisteme a căror dinamică evoluează spre puncte de echilibru stabil (sistemele sunt denumite cu dinamică convergentă), ale căror poziţii în spaţiul stărilor sunt fixate prin valorile interconexiunilor. În acest context, au fost raportate rezultate remarcabile în rezolvarea unor probleme de optimizare, de conversie analog-numerică şi de clasificare [84]. Analiza stabilităţii unor asemenea reţele se bazează de obicei pe metoda Liapunov [81], care prezintă avantajul de a nu necesita rezolvarea ecuaţiilor care descriu sistemul. Recent se acordă un interes crescând şi reţelelor cu comportare periodică, în special în privinţa sincronizării ansamblurilor de oscilatoare elementare şi a stocării informaţiei sub forma ciclurilor limită. Mai mult, studiul reţelelor neurale cu comportare haotică este de asemenea avută în vedere, în special datorită raportării unor rezultate care confirmă existenţa unor astfel de regimuri în anumite zone ale creierului uman [62]. 2.3.2 Funcţia de cost Un aspect fundamental legat de procesul de învăţare al reţelelor neurale este cel referitor la scopul pentru care acestea sunt utilizate. Astfel, în cazul aplicaţiilor de regresie, se poate arăta că ţinta urmărită o constituie modelarea densităţii de probabilitate a valorilor de ieşire (target) condiţionată de distribuţia datelor de intrare. Pe de altă parte, în cazul problemelor de clasificare se urmăreşte estimarea probabilităţilor ca variabilele de intrare să aparţină uneia dintre categoriile disponibile. Atingerea acestor obiective devine posibilă prin optimizarea unor funcţii de cost

2.3 Algoritmi de învăţare 37
convenabil definite în funcţie de parametrii reţelei neurale, cu observaţia că cele 2 tipuri de aplicaţii necesită de regulă folosirea unor funcţii de cost specifice. În cele ce urmează trecem în revistă o serie de aspecte teoretice fundamentale care vor permite înţelegerea mai exactă a modului de operare al reţelelor neurale. A. Estimarea densităţii de probabilitate În Anexa A sunt prezentate o serie de definiţii ale unor noţiuni de bază din teoria probabilităţilor. Ne vom ocupa în cele ce urmează de posibilitatea de a modela o funcţie de densitate de probabilitate p(X) folosind un număr finit de exemple X[n], cu n = 1,…N. Pornind de aici, vom ilustra în paragraful următor posibilitatea de a estima densităţi de probabilitate condiţionate, care vor justifica în final scopul în care sunt folosite reţelele neurale. Există 2 categorii de metode de estimare a densităţilor de probabilitate, anume metode parametrice, respectiv neparametrice. Cele dintâi impun o formă predefinită a funcţiei de densitate, dependentă de un număr de parametri specifici, ale căror valori urmează să fie estimate folosind baza de date disponibilă. Dezavantajul unei asemenea abordări constă în faptul că forma funcţională particulară impusă pur şi simplu se poate dovedi inadecvată modelării procesului fizic real care a generat datele. Metodele neparametrice nu particularizează forma funcţiei modelate, ci realizează estimarea pornind exclusiv de la datele disponibile, cu dezavantajul că numărul parametrilor necesari creşte pe măsură ce baza de date se lărgeşte. În cele ce urmează ne vom referi la o metodă parametrică de estimare bazată pe principiul denumit maximum likelihood [24]. Astfel, să considerăm o funcţie densitate de probabilitate p(X) dependentă de un set de parametri θ = [θ1 θ2 … θM]T şi un număr de N vectori {X[1], X[2], …X[N]} care vor servi la estimarea acestor parametri. Densitatea de probabilitate a ansamblului acestor vectori (joint probability density) va fi:
∏=
=N
nnpL
1])[()( Xθ θ
(2. 8)
care reprezintă o funcţie ce depinde de variabilele θ pentru un set fixat de vectori X[n]. Principiul denumit maximum likelihood urmăreşte determinarea valorilor vectorului de parametri θ care asigură maximizarea funcţiei L(θ) (justificarea logică fiind legată de maximizarea probabilităţii ca datele disponibile să fi fost generate de către un model având parametrii optimi θ). Pentru ca procesul de optimizare să fie asociat cu noţiunea mai familiară a unei funcţii de eroare – care ar trebui minimizată – se preferă înlocuirea funcţiei L(θ) prin versiunea sa procesată sub forma:
38 CAPITOLUL 2: CARACTERISTICI FUNDAMENTALE
∑=
−=−=N
nnpLJ
1]))[(ln())(ln( Xθ θ
(2. 9)
Soluţia acestei probleme de optimizare va depinde de forma particulară a funcţiei pθ(X) considerate şi, de regulă, va necesita utilizarea unui metode numerice adecvate. În cazul particular în care densitatea de probabilitate pθ(X) se presupune de formă normală (gaussiană) vom avea: )()(
21
2/12/
1
||)2(
1)(µXΣµX
ΣX
−−− −
=T
ep dπ
(2. 10)
în care µ reprezintă media aritmetică a vectorilor X (presupuşi de dimensiune d), iar Σ este matricea de covarianţă, de dimensiune (dxd). Se poate arăta că procesul de minimizare a funcţiei J conduce în această situaţie la următoarele valori estimate ale parametrilor modelului (parametrii θ se particularizează la valorile µ şi Σ):
∑
∑
=
=
−−=
=
N
n
T
N
n
nnN
nN
1
1
)][)(][(1ˆ
][1ˆ
µXµXΣ
Xµ
(2. 11)
Intuitiv, rezultatele obţinute se justifică, ţinând cont că înlocuind în relaţiile anterioare operaţiunea de mediere aritmetică pe un set finit de realizări individuale cu operatorul standard E{.} (expectation) ajungem la definiţiile standard ale celor două mărimi valabile în cazul variabilelor cu distribuţie normală. B. Estimarea densităţii de probabilitate condiţionată Reamintim că scopul principal al unei reţele neurale este de a oferi un model cât mai exact al procesului fizic responsabil de generarea perechilor de date intrare-ieşire disponibile şi nu memorarea acestor valori particulare. Dacă scopul este atins, sistemul va furniza răspunsuri adecvate şi pentru date de intrare noi, care nu au fost utilizate efectiv în procesul de estimare a valorilor parametrilor specifici modelului. Instrumentul care permite descrierea procesului prin care sunt generate perechi de

2.3 Algoritmi de învăţare 39
vectori intrare-ieşire dorită este densitatea de probabilitate p(X,t), care se poate exprima în mod echivalent sub forma: )()|(),( XXttX ppp = (2. 12)
unde p(t|X) desemnează densitatea de probabilitate condiţionată a ieşirii în raport cu intrarea (adică densitatea de probabilitate a variabilei t dacă intrarea X are o valoare particulară dată), iar p(X) este densitatea (necondiţionată) de probabilitate a intrării. Ţinând cont de definiţia funcţiei L(θ) din paragraful anterior, se poate scrie în mod asemănător relaţia: ∏∏ ==
nnnpnnpnnpL ])[(])[|][(])[],[( XXttX (2. 13)
Mai mult, trecând la varianta prelucrată sub forma unei funcţii de eroare, se poate scrie: ∑ ∑−−=−=
n nnpnnpLJ ]))[(ln(]))[|][(ln()ln( XXt (2. 14)
Vom justifica imediat că scopul principal al unei reţele neurale va fi de a estima cât mai exact primul termen al relaţiei anterioare. Deoarece cel de al doilea termen nu depinde de parametrii reţelei neurale putem renunţa la acesta, funcţia de eroare căpătând forma mai simplă: ∑−=
nnnpJ ]))[|][(ln( Xt (2. 15)
Alegând diverse forme particulare ale densităţii de probabilitate condiţionate p(t|X) se ajunge la definirea mai multor tipuri de funcţii de eroare. Pentru simplitate, să considerăm în cele ce urmează că variabila aleatoare care defineşte semnalul dorit este unidimensională şi este obţinută pe baza relaţiei: Nnnenhnt …1,][])[(][ =+= X (2. 16)
în care h(.) desemnează o funcţie deterministă, iar e[n] reprezintă zgomot cu distribuţie normală (gaussiană) cu valoare medie nulă şi dispersie σ independentă de semnalul de intrare, de forma:

40 CAPITOLUL 2: CARACTERISTICI FUNDAMENTALE
2
2
221)( σσπ
e
eep−
=
(2. 17)
Să presupunem că avem la dispoziţie o reţea neurală capabilă să ofere o aproximaţie a funcţiei h(.) sub forma yW(X), în care vectorul W reuneşte totalitatea parametrilor reţelei. În aceste condiţii relaţia (2. 3) se poate rescrie sub forma:
2
2
2))((
21)|( σσπ
XW
X
yt
etp
−−
=
(2. 18)
astfel încât funcţia de eroare (2. 15) capătă forma:
{ } )2ln(2
ln])[(][2
12
12 πσ
σ
NNnyntJN
n++−= ∑
=XW
(2. 19)
Lăsând deoparte valorile constante (independente de valorile parametrilor W) ajungem în final la expresia binecunoscutei erori pătratice:
{ }2
1])[(][
21 ∑
=−=
N
nnyntJ XW
(2. 20)
Observaţii: a) analiza anterioară poate fi extinsă comod la cazul variabilelor target multidimensionale b) pentru precizarea completă a expresiei (2.18) este necesară şi obţinerea valorii parametrului σ. Având la dispoziţie valorile optime W* rezultate în urma minimizării funcţiei de eroare se poate demonstra că valoarea căutată este:
{ }∑=
−=N
nnynt
N 1
2*
2 ])[(][1 XWσ (2. 21)

2.3 Algoritmi de învăţare 41
c) nu este obligatoriu ca densitatea de probabilitate p(t|X) să aibă o distribuţie normală, însă se poate arăta că în cazul utilizării funcţiei de eroare pătratice valorile optime ale parametrilor reţelei neurale nu vor putea face posibilă distincţia între o distribuţie normală şi oricare alt tip de distribuţie având aceeaşi valoare medie şi aceeaşi dispersie. d) în aplicaţiile practice se folosesc deseori unele variante ale erorii pătratice (2. 20), anume:
Eroare pătratică medie (MSE): { }
2
1])[(][
21 ∑
=−=
N
nnynt
NJ XW
(2. 22)
Eroare pătratică medie normalizată (NMSE): { }
{ }∑
∑
=
=
−
−
= N
nt
N
n
nt
nynt
J
1
2
1
2
)][
])[(][
µ
XW
(2. 23)
Varianta din relaţia (2. 22) prezintă avantajul independenţei valorii erorii de numărul de exemplare care formează baza de date, iar cea din relaţia (2. 3) al unei imagini relative a valorii erorii în raport cu energia semnalului target (µt desemnează valoarea medie a datelor target).
C. Interpretarea ieşirilor unei reţele neurale Având la dispoziţie rezultatele foarte importante prezentate în paragrafele anterioare, vom ilustra în finalul acestui capitol modalitatea de interpretare a răspunsurilor oferite de ieşirile unei reţele neurale. Pentru simplitate, vom considera din nou cazul unei reţele cu o singură ieşire. Astfel, în cazul unei baze de date de dimensiune infinită (cu N → ∞) expresia erorii pătratice (2. 20) devine [24]:
42 CAPITOLUL 2: CARACTERISTICI FUNDAMENTALE
{ }
{ }∫
∑
−=
=−==∞→
XXX
X
W
W
dtdtpnynt
nyntN
JN
nN
),(])[(][21
])[(][21lim
2
2
1
(2. 24)
Folosind relaţia (2. 12) putem scrie în continuare: { }∫ −= XXXXW dtdptpnyntJ )()|(])[(][
21 2
(2. 25)
Introducem următoarele definiţii ale unor medii aritmetice condiţionate:
∫∫=
=
dttptXt
dtttpXt
)|(
)|(
22 X
X
(2. 26)
În urma unui calcul simplu se ajunge la următoarea expresie echivalentă cu relaţia (2. 25):
{ } { }∫∫ −+−= XXXXXXXX W dpttdpytJ )(21)()(
21 222
(2. 27)
Se observă uşor că cel de al doilea termen din relaţia precedentă nu depinde de parametrii reţelei neurale, astfel încât minimizarea funcţiei de eroare va presupune anularea primului termen. Ajungem astfel la concluzia importantă că atunci când se utilizează o funcţie de eroare pătratică ieşirea unei reţele neurale poate fi interpretată ca valoarea medie a informaţiei target condiţionată de datele de intrare X: XXW ty =)( (2. 28)
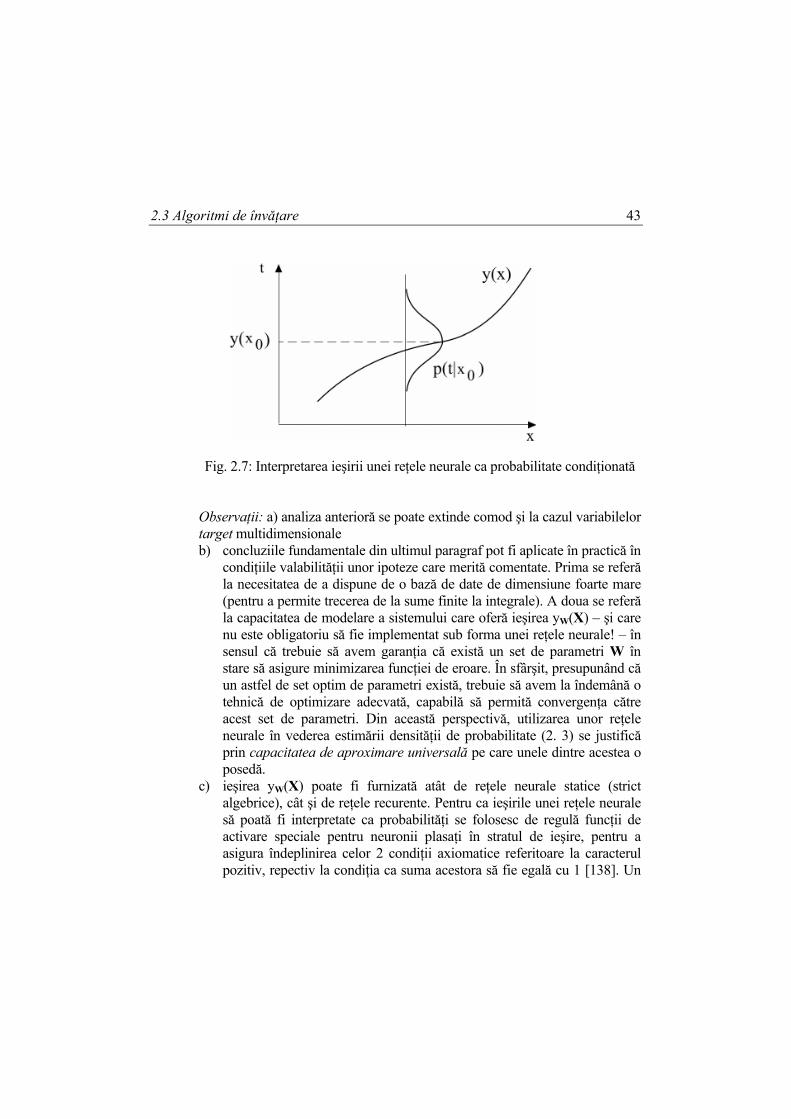
Interpretarea geometrică a acestei relaţii se indică în Fig. 2.7.
2.3 Algoritmi de învăţare 43
Fig. 2.7: Interpretarea ieşirii unei reţele neurale ca probabilitate condiţionată
Observaţii: a) analiza anterioră se poate extinde comod şi la cazul variabilelor target multidimensionale b) concluziile fundamentale din ultimul paragraf pot fi aplicate în practică în
condiţiile valabilităţii unor ipoteze care merită comentate. Prima se referă la necesitatea de a dispune de o bază de date de dimensiune foarte mare (pentru a permite trecerea de la sume finite la integrale). A doua se referă la capacitatea de modelare a sistemului care oferă ieşirea yW(X) – şi care nu este obligatoriu să fie implementat sub forma unei reţele neurale! – în sensul că trebuie să avem garanţia că există un set de parametri W în stare să asigure minimizarea funcţiei de eroare. În sfârşit, presupunând că un astfel de set optim de parametri există, trebuie să avem la îndemână o tehnică de optimizare adecvată, capabilă să permită convergenţa către acest set de parametri. Din această perspectivă, utilizarea unor reţele neurale în vederea estimării densităţii de probabilitate (2. 3) se justifică prin capacitatea de aproximare universală pe care unele dintre acestea o posedă.
c) ieşirea yW(X) poate fi furnizată atât de reţele neurale statice (strict algebrice), cât şi de reţele recurente. Pentru ca ieşirile unei reţele neurale să poată fi interpretate ca probabilităţi se folosesc de regulă funcţii de activare speciale pentru neuronii plasaţi în stratul de ieşire, pentru a asigura îndeplinirea celor 2 condiţii axiomatice referitoare la caracterul pozitiv, repectiv la condiţia ca suma acestora să fie egală cu 1 [138]. Un
44 CAPITOLUL 2: CARACTERISTICI FUNDAMENTALE
exemplu în acest sens este oferit de funcţia denumită softmax:
∑=
= N
j
x
xi
j
i
e
exf
1
)( , unde N este numărul total de ieşiri ale reţelei.
d) o utilizare extrem de utilă a noţiunilor prezentate în acest paragraf se întâlneşte în cazul aplicaţiilor financiare de predicţie, în care se preferă obţinerea nu a unei valori punctuale ci estimarea întregii densităţi de probabilitate, cu efectul benefic al obţinerii în acest mod a unei aprecieri a gradului de încredere în valoarea prezisă [134].


















