Bazele ingineriei
108
i CUPRINS 1. BAZELE PROIECTĂRII ÎN INGINERIA MECANICĂ ……………… .5 1.1 Obiectul şi importanţa disciplinei de Inginerie mecanică………………...5 1.2 Condiţii de bază pentru proiectarea organelor de maşini………………….5 1.2.1 Introducere ………………………………………………………….5 1.2.2 Condiţii termice …………………………………………………….6 1.2.3 Condiţii tehnologice ………………………………………………...7 1.2.4 Elemente privind precizia sistemelor mecanice……………………..7 1.2.5 Precizia dimensională………………………………………………..8 1.2.6 Sisteme de ajustaje şi toleranţe …………………………………….10 1.2.7 Calitatea suprafeţelor……………………………………………….12 1.2.8 Materiale utilizate în construcţia de maşini şi aparate electrice……13 1.3 Calculul de rezistenţă al organelor de maşini……………………………..15 1.3.1 Relaţii de bază pentru calculul de rezistenţă la solicitări statice……15 1.3.2 Relaţii de calcul la solicitări variabile………………………………16 1.3.3 Principii generale de calcul ale organelor de maşini ………………20 1.4 Fiabilitatea organelor de maşini şi a sistemelor ………………………….21 2. MECANISME………………………………………………………………..24 2.1 Structura mecanismelor …………………………………………………..24 2.2 Mecanisme cu pârghii…………………………………………………….29 2.2.1 Analiza cinematica a mecanismelor cu pârghii ……………………29 2.2.2 Metoda grafoanalitică………………………………………………30 2.2.3 Metoda analitică pentru analiza cinematică a mecanismelor (metoda contururilor independente)………………………………..32 2.2.4 Sinteza mecanismelor cu pârghii…………………………………...33 2.2.5 Determinarea forţelor la mecanismele cu pârghii…………………..36 2.2.6 Noţiuni de precizia mecanismelor………………………………….41 2.2.7 Exemple de mecanisme cu pârghii utilizate în construcţia de aparate………………………………………………………………43 2.3 Mecanisme cu camă ……………………………………………………...45 2.3.1 Analiza mecanismelor cu camă ……………………………………46 2.3.2 Sinteza mecanismelor cu camă …………………………………….47 2.3.3 Transmiterea forţelor la mecanismul cu camă……………………...51 2.3.4 Trasarea profilului camei de rotaţie la mecanismul cu tachet axial...52 2.4 Mecanisme cu mişcare intermitentă ……………………………………...53 2.4.1 Mecanismul cu cruce de Malta……………………………………..53 2.4.2 Mecanismul cu clichet……………………………………………...54 2.5 Mecanisme de blocare ……………………………………………………55 2.5.1 Mecanisme de blocare comandate …………………………………56 2.5.2 Mecanisme de blocare semiautomate ……………………………...58 2.5.3 Mecanisme de blocare automată …………………………………59 2.6 Mecanisme logice ………………………………………………………. 60
-
Upload
bignatural -
Category
Documents
-
view
57 -
download
5
description
Inginerie mecanica
Transcript of Bazele ingineriei
i
CUPRINS
1. BAZELE PROIECTĂRII ÎN INGINERIA MECANICĂ ……………… .5 1.1 Obiectul şi importanţa disciplinei de Inginerie mecanică………………...5 1.2 Condiţii de bază pentru proiectarea organelor de maşini………………….5
1.2.1 Introducere ………………………………………………………….5 1.2.2 Condiţii termice …………………………………………………….6 1.2.3 Condiţii tehnologice ………………………………………………...7 1.2.4 Elemente privind precizia sistemelor mecanice……………………..7 1.2.5 Precizia dimensională………………………………………………..8 1.2.6 Sisteme de ajustaje şi toleranţe …………………………………….10 1.2.7 Calitatea suprafeţelor……………………………………………….12 1.2.8 Materiale utilizate în construcţia de maşini şi aparate electrice……13
1.3 Calculul de rezistenţă al organelor de maşini……………………………..15 1.3.1 Relaţii de bază pentru calculul de rezistenţă la solicitări statice……15 1.3.2 Relaţii de calcul la solicitări variabile………………………………16 1.3.3 Principii generale de calcul ale organelor de maşini ………………20
1.4 Fiabilitatea organelor de maşini şi a sistemelor ………………………….21 2. MECANISME………………………………………………………………..24
2.1 Structura mecanismelor …………………………………………………..24 2.2 Mecanisme cu pârghii…………………………………………………….29
2.2.1 Analiza cinematica a mecanismelor cu pârghii ……………………29 2.2.2 Metoda grafoanalitică………………………………………………30 2.2.3 Metoda analitică pentru analiza cinematică a mecanismelor
(metoda contururilor independente)………………………………..32 2.2.4 Sinteza mecanismelor cu pârghii…………………………………...33 2.2.5 Determinarea forţelor la mecanismele cu pârghii…………………..36 2.2.6 Noţiuni de precizia mecanismelor………………………………….41 2.2.7 Exemple de mecanisme cu pârghii utilizate în construcţia de
aparate………………………………………………………………43 2.3 Mecanisme cu camă ……………………………………………………...45
2.3.1 Analiza mecanismelor cu camă ……………………………………46 2.3.2 Sinteza mecanismelor cu camă …………………………………….47 2.3.3 Transmiterea forţelor la mecanismul cu camă……………………...51 2.3.4 Trasarea profilului camei de rotaţie la mecanismul cu tachet axial...52
2.4 Mecanisme cu mişcare intermitentă ……………………………………...53 2.4.1 Mecanismul cu cruce de Malta……………………………………..53 2.4.2 Mecanismul cu clichet……………………………………………...54
2.5 Mecanisme de blocare ……………………………………………………55 2.5.1 Mecanisme de blocare comandate …………………………………56 2.5.2 Mecanisme de blocare semiautomate ……………………………...58 2.5.3 Mecanisme de blocare automată …………………………………59
2.6 Mecanisme logice ………………………………………………………. 60
ii
2.7 Mecanisme pentru roboţi industriali şi manipulatoare …………………. 61 2.7.1 Studiul parametrilor cinematici şi geometrici ai braţului ………… 62 2.7.2 Mecanismul de orientare………………………………………….. 66 2.7.3 Mecanismul de apucare …………………………………………... 66 2.7.4 Calculul forţei de antrenare a mecanismului de apucare ………… 67
3. TRANSMISII PRIN ROŢI DE FRICŢIUNE …………………………… 68 3.1 Generalităţi……………………………………………………………… 68 3.2 Transmisia prin roţi de fricţiune cilindrice cu suprafaţa de contact netedă 68 3.3 Transmisia prin roţi de fricţiune cilindrice cu suprafaţa canelată ………. 70 3.4 Transmisia prin roţi de fricţiune conice ………………………………... 70 3.5 Variatori de turaţie cu roţi de fricţiune ………………………………… 71 3.6 Variatori cu roţi de fricţiune şi elemente intermediare ………………… 72 3.7 Materiale ………………………………………………………………. 72
4. TRANSMISII PRIN ROŢI DINŢATE………………………………… 73 4.1 Generalităţi …………………………………………………………….. 73 4.2 Legea fundamentală a angrenării ………………………………………. 74 4.3 Curbe folosite pentru profilul dinţilor…………………………………... 76 4.4 Ecuaţiile evolventei şi proprietăţile ei ………………………………….. 77 4.5 Geometria danturii cu profil evolventic………………………………… 77 4.6 Cremaliera de referinţă…………………………………………………. 79 4.7 Roţi dinţate cu profil deplasat ………………………………………….. 80 4.8 Calculul angrenajelor cilindrice cu dinţi drepţi…………………………. 82
4.8.1 Forţele la angrenajele cilindrice cu dinţi drepţi ………………….. 82 4.8.2 Calculul de rezistenţă la solicitarea
de încovoiere……………………………… …………………….. 83 4.8.3 Calculul la uzură …………………………………………………. 84
4.9 Roţi dinţate cu dinţi înclinaţi …………………………………………… 86 4.9.1 Particularităţi geometrice şi cinematice ………………………….. 86 4.9.2 Forţele şi calculul de rezistenţă al angrenajelor cilindrice cu dinţi
înclinaţi……………………………………………………………. 89 4.10 Roţi dinţate cu profil cicloidal ……………………………………….. 90 4.11 Angrenaje cu roţi dinţate conice ……………………………………... 91
4.11.1 Forţele si calculul de rezistenţă al roţilor dinţate conice………….. 93 4.12 Angrenaje melcate……………………………………………………. 94
4.12.1 Elemente geometrice şi cinematice……………………………….. 94 4.12.2 Sistemul de forţe şi randamentul angrenajului melcat …………… 96 4.12.3 Calculul de rezistenţă al angrenajului melcat…………………….. 97
4.13 Angrenaje speciale …………………………………………………... 98 4.13.1 Angrenaje minimale………………………………………………. 98 4.13.2 Angrenaje cilindro-conice ………………………………………... 99 4.13.3 Angrenaje toroidale ………………………………………………. 99 4.13.4 Angrenaje cu profil în arc de cerc (Novicov) …………………….100 4.13.5 Angrenaje armonice ……………………………………………... 101

iii
4.14 Mecanisme cu roţi dinţate…………………………………………… 103 4.15 Construcţia reductoarelor cu roţi dinţate ……………………………. 105 4.16 Materiale pentru roţi dinţate…………………………………………. 107
5. TRANSMISII PRIN CURELE…………………………………………... 108 5.1 Generalităţi …………………………………………………………….. 108 5.2 Calculul transmisiei prin curea lată ……………………………………. 109 5.3 Transmisii prin curele trapezoidale şi rotunde ………………………… 112 5.4 Materiale ……………………………………………………………….. 113 5.5 Transmisia prin curea dinţată……………………………………………114
6. TRANSMISII PRIN LANŢ………………………………………………. 115 6.1 Consideraţii generale…………………………………………………… 115 6.2 Calculul geometric al transmisiei prin lanţ……………………………...116 6.3 Cinematica transmisiilor prin lanţ ………………………………………118
7. OSII ŞI ARBORI DREPŢI……………………………………………….. 119 7.1 Calculul osiilor…………………………………………………………. 119 7.2 Calculul arborilor drepţi………………………………………………... 120 7.3 Verificarea arborilor şi osiilor………………………………………….. 121 7.4 Turaţia critică a arborilor……………………………………………….. 124
8. ELEMENTE DE TRIBOLOGIE………………………………………… 125 8.1 Noţiuni privind fenomenul de frecare ………………………………… 125 8.2 Uzura…………………………………………………………………… 127
9. LAGĂRE …………………………………………………………………. 129 9.1 Introducere ……………………………………………………………. 129 9.2 Lagăre radiale cu alunecare…………………………………………… 129 9.3 Lagăre axiale cu alunecare ……………………………………………. 13 1 9.4 Forme constructive de lagăre cilindrice ………………………………. 132 9.5 Lagăre cu suprafeţe conice…………………………………………….. 13 2 9.6 Lagăre cu suprafeţe sferice ……………………………………………. 133 9.7 Lagăre sinterizate……………………………………………………… 134 9.8 Lagăre cu frecare fluidă……………………………………………….. 135
9.8.1 Consideraţii generale……………………………………………. 135 9.8.2 Lagăre hidrodinamice …………………………………………... 135 9.8.3 Lagăre hidrostatice ……………………………………………… 135
9.9 Căi pentru micşorarea frecării şi reducerea uzurii…………………….. 140 9.10 Lagăre cu rostogolire……………………………………………….. 140
9.10.1 Consideraţi generale…………………………………………….. 140 9.10.2 Calculul de alegere a rulmenţilor standardizaţi…………………. 142 9.10.3 Montarea rulmenţilor …………………………………………… 143 9.10.4 Etanşarea rulmenţilor……………………………………………. 144
9.11 Lagăre speciale……………………………………………………… 145 10. CUPLAJE…………………………………………………………………. 146
10.1 Consideraţii generale…………………………………………………146 10.2 Cuplaje fixe………………………………………………………….. 146 10.3 Cuplaje mobile………………………………………………………. 147
iv
10.4 Cuplaje intermitente …………………………………………………149 10.4.1 Ambreiaje comandate prin contact rigid………………………….149 10.4.2 Ambreiaje prin fricţiune…………………………………………..150 10.4.3 Ambreiaje automate prin fricţiune………………………………..152
10.5 Cuplaje de siguranţă………………………………………………….152 10.6 Cuplaje de sens unic………………………………………………….153
11. ARCURI…………………………………………………………………….154 11.1 Consideraţii generale…………………………………………………156 11.2 Arcuri lamelare……………………………………………………….156 11.3 Arcul spiral plan………………………………………………………157 11.4 Arcul elicoidal………………………………………………………...158 11.5 Arcul bară de torsiune………………………………………………...160 11.6 Arcuri bimetalice……………………………………………………..160 11.7 Arcuri speciale………………………………………………………..160 11.8 Sisteme de arcuri ……………………………………………………..161
12. ASAMBLĂRI DEMONTABILE………………………………………….162 12.1 Introducere……………………………………………………………162 12.2 Asamblări prin strângere pe suprafeţe cilindrice……………………..162 12.3 Asamblări prin strângere pe suprafeţe conice………………………...164 12.4 Asamblări prin strângere pe suprafeţe striate…………………………165 12.5 Asamblări prin efect elastic…………………………………………...165 12.6 Asamblări prin pene…………………………………………………..165 12.7 Asamblări prin ştifturi………………………………………………...167 12.8 Asamblări prin caneluri……………………………………………….168 12.9 Asamblări filetate……………………………………………………..169
12.9.1 Consideraţii generale……………………………………………...169 12.9.2 Elemente geometrice ale filetului metric………………………….170 12.9.3 Sistemul de forţe la asamblarea filetată …………………………..171 12.9.4 Calculul de rezistenţă al filetului………………………………….172 12.9.5 Determinarea înălţimii piuliţei…………………………………….173 12.9.6 Asigurarea asamblărilor filetate …………………………………..174 12.9.7 Şuruburi de mişcare……………………………………………….175
13. ASAMBLĂRI NEDEMONTABILE……………………………………...176 13.1 Generalităţi …………………………………………………………...176 13.2 Asamblări prin deformaţii ……………………………………………176
13.2.1 Asamblări prin nituire ……………………………………………176 13.2.2 Asamblări prin răsfrângere……………………………………….177 13.2.3 Asamblări prin urechi ……………………………………………178 13.2.4 Asamblări prin nervurare…………………………………………178
13.3 Asamblări sudate……………………………………………………...178 13.4 Asamblări prin lipire………………………………………………….181
14. DINAMICA MECANISMELOR ŞI APARATELOR…………………...182 14.1 Noţiuni de dinamica mecanismelor …………………………………..182
v
14.2 Ecuaţia diferenţială a mişcării mecanismului ………………………..183 14.2.1 Integrarea ecuaţiei de mişcare……………………………………..184 14.2.2 Aplicaţie…………………………………………………………...185
14.3 Bilanţul energetic……………………………………………………..186 14.4 Neuniformitatea mişcării mecanismelor……………………………...187
14.4.1 Uniformizarea variaţiilor periodice de viteză cu ajutorul volantului…………………………………………………… 188 14.4.2 Uniformizarea variaţiilor aperiodice de viteză cu ajutorul
moderatoarelor……………………………………………………189 14.4.3 Uniformizarea variaţiilor aperiodice de viteză cu ajutorul
regulatoarelor……………………………………………………...189 14.4.4 Uniformizarea variaţiilor aperiodice de viteză cu ajutorul
regulatoarelor electrice şi electronice……………………………..190 14.5 Echilibrarea maşinilor şi aparatelor…………………………………..190
14.5.1 Consideraţii generale ……………………………………………..190 14.5.2 Echilibrarea statică a discurilor……………………………………190 14.5.3 Echilibrarea dinamică a rotoarelor………………………………...191 14.5.4 Echilibrarea statică a mecanismelor plane ………………………..191 14.5.5 Metoda punctelor principale pentru echilibrarea statică a
mecanismelor ……………………………………………………..192 14.5.6 Aplicaţie…………………………………………………………..193
14.6 Vibraţii în aparate…………………………………………………….194 14.6.1 Consideraţii generale……………………………………………...194 14.6.2 Amortizarea vibraţiilor libere în aparate…………………………..194 14.6.3 Amortizoare cu lichid……………………………………………..197 14.6.4 Amortizoare cu aer………………………………………………..198 14.6.5 Amortizoare cu frecare uscată ……………………………………198 14.6.6 Amortizoare magnetoinductive……………………………………198 14.6.7 Izolarea antivibratorie a maşinilor şi aparatelor …………………..199
5
Capitolul 1
BAZELE PROIECTĂRII ÎN INGINERIA MECANICĂ
1.1.Obiectul şi importanţa disciplinei de Inginerie mecanică Maşinile sunt sisteme tehnice utilizate la transformarea unei energii în lucru
mecanic util sau într-o altă formă de eneregie . Aparatele au rolul de a transmite şi prelucra semnalele , care sunt purtătoare de informaţii .
Mecanismele sunt , de regulă , părţi componente ale maşinilor şi aparatelor şi servesc la transmiterea şi transformarea mişcării.
Maşinile , aparatele şi mecanismele sunt realizate din părţi mecanice , cu funcţii distincte , care pot fi studiate şi proiectate separat şi care sunt numite organe de maşini . Cursul de Inginerie mecanică , predat studenţilor de la Facultatea de Electrotehnică , este o disciplină de culturaă tehnică generală , cu caracter tehnic şi aplicativ , care are ca scop studierea elementelor mecanice componente ale maşinilor, mecanismelor şi aparatelor din domeniul electric , cu luarea în consideraţie a legăturilor de interdependenţă dintre ele , a satisfacerii rolului funcţional ,al siguranţei în exploatare şi al cerinţelor de execuţie , montaj şi întreţinere etc.
Dsiciplina contribuie la formarea orizontului tehnic şi inerdisciplinar al viitorilor specialişti din domeniul electric , la însuşirea unor metode inginereşti ştiinţifice de abordare şi soluţionare a problemelor de concepţie , proiectare şi execuţie a părţilor mecanice din construcţia maşinilor , aparatelor şi instalaţiilor electrice , stimulând în acelaşi timp interesul pentru studiul disciplinelor de bază cum ar fi : matematica , fizica , rezistenţa materialelor , tehnologia etc.
1.2.Condiţii de bază pentru proiectarea organelor de maşini
1.2.1.Introducere Organele de maşini pot fi clasificate după : a) criteriul constructiv:
• simple – cele executate dintr-o singură piesă cum sunt : niturile , penele , şuruburile , arborii , roţile simple ;
• compuse – alcătuite din mai multe piese , care au în ansamblu acelaşi rol funcţional cum sunt : rulmenţii , cuplajele , lagărele etc.
b) criteriul funcţional : • elemente de asamblare ; • elemente pentru transmiterea şi transformarea mişcării ; • elemenete de legătură şi antrenare etc .
c) criteriul calitativ.
6
Criteriul calitativ hotărâtor al construcţiei de mecanică fină este fidelitatea şi precizia transmiterii fluxului de semnale , cu respectarea legii de transmitere a semnalului într-un anumit timp .
În construcţia de maşini din mecanica grea , criteriul calitativ decisiv îl reprezintă randamentul , care dă indicaţii asupra transmiterii fluxului de energie sau de masă . Unul din parametrii cei mai importanţi ai calităţiiî il constituie fiabilitatea , prin care se înţelege capacitatea produsului de a funcţiona potrivit destinaţiei pentru care a fost realizat şi în condiţiile de utilizare specifice o perioadă de timp bine determinată. Fiabilitatea este strâns legată de noţiunea de mentenabilitate ( reparabilitate), care constă în capacitatea produsului de a fi pus în stare de funcţionare într-un timp cât mai scurt. Condiţiile pe care trebuie să le îndeplinească elementele constructive sunt variate şi depind de :
• funcţie şi destinaţie ; • putere , viteză, precizie şi sensibilitate ; • tehnologia de execuţie şi exploatare etc. Principalele condiţii cerute elementelor constructive sunt: • condiţii tehnice ; • condiţii tehnologice ; • condiţii estetice ; • condiţii economice. În aceste condiţii se cuprind cu o deosebită importanţă materialele cu
propietăţile lor şi toleranţele cu preciziă de execuţie şi de montaj. Îmbinarea judiciosă a condiţiilor enunţate reprezintă esenţa oricărei construcţii inginereşti .
1.2.2.Condiţii tehnice Condiţiile tehnice se cuprind , în esenţă , în calculul organelor de maşini , care , în ansamblul operaţiei de proiectare are drept scop determinarea dimensiunilor şi formei . Calculul organelor de maşini poate fi :
• de rezistenţă ; • de rigiditate ; • la vibraţii ; • la uzură ; • termic . Metodele de calcul , indiferent de natura acestuia , operează cu concepte
simplificate în ceea ce priveşte : distribuţia încărcării , sistemul de rezemare , forma piesei , condiţiile de exploatare etc. Adaptarea la condiţiile reale se face prin introducerea unor coeficienţi determinaţi teoretic sau experimental .
7
1.2.3.Condiţii tehnologice Condiţiile tehnologice cer ca elementele constructive să fie simple ca formă ,
să se adopte procedeul de fabricaţie cel mai adecvat , să se asigure precizia functională necesară .
Forma pieselor , precizia de execuţie necesară şi mărimea seriei de fabricaţie, determină alegerea procedeului de prelucrare .
Cele mai utilizate procedee tehnologice specifice mecanicii fine sunt : turnarea sub presiune , ştanţarea la rece , injecţia sau presarea pieselor din material plastic , imprimarea etc.
a) Turnarea sub presiune are următoarele avantaje : • asigură rezistentă mecanica bună ; • calitatea suprafeţei obţinute prin turnare corespunde unei rugozităţi Ra ≅ 6,3 µm ; • precizia de execuţie este 0,02÷0,03 mm ; • se pot executa piese complicate dintr-o singură turnare ; • productivitate ridicată. b) Ştanţarea la rece prezintă următoarele avantaje : • asigură o productivitate foarte mare ; • se pot obţine piese complicate dintr-o singură operaţie ; • asigură o economie importantă de material ; • calitatea suprafeţei prelucrate prin ştanţare este Ra ≅ 6,3 µm. c) Injecţia sau presarea din materiale plastice are următoarele avantaje : • piesele nu mai necesită prelucrări ulterioare şi pot avea forma suficient de
complexă ; • se pot realiza piese cu găuri sau filete ; • piesele pot fi metalizate pentru îmbunătăţirea aspectului exterior etc. Pentru eliminarea tensiunilor interne şi evitarea deformaţiilor ulterioare se recomandă un tratament de îmbătrânire la temperatura de 80 ÷ 100o , timp de câteva ore. d) Imprimarea circuitelor electrice şi electronice se utilizează în domeniul
aparatelor radio şi televiziune , aparatelor electrice de măsurat etc. Imprimarea prezintă urmatoarele avantaje : • posibilitatea mecanizării şi automatizării procesului de execuţie şi montaj ; • asigurarea unei rezistenţe mecanice mari ,a îmbinărilor efectuate la montaj ; • micşorarea gabaritului aparatului ; • asigurarea unei rigidităţi bune . 1.2.4.Elemente privind precizia sistemelor mecanice Precizia funcţională a aparatelor , fidelitatea cu care acestea transmit semnalele
impuse , depinde de abaterile pe care le introduc în fabricaţie diferitele procedee tehnologice .
8
Abaterile introduse de procedeele tehnologice pot fi : • dimensionale (abateri de la dimensiunea prescrisă) ; • macrogeometrice (abateri de la forma geometrică prescrisă) ; • microgeometrice (abateri de la calitatea suprafeţei) . Fabricarea elementelor constructive la gradul de precizie necesar , face posibilă
interschimbabilitatea lor . Se numeşte interschimbabilitate ansamblul principiilor constructive şi tehnologice după care se execută piesa astfel încât să poată fi montată fără prelucrări suplimentare .
Interschimbabilitatea poate fi : • completă , atunci când aceasta este extinsă şi asupra pieselor de rezervă ,
furnizate de către fabrică , şi este recomandată în cazul producţiei de serie mare şi de masă ;
• limitată sau incompletă , care se referă la grupe de piese care formează un ansamblu sau subansamblu şi este valabilă numai în interiorul fabricii respective . Această interschimbabilitate se realizează şi prin compensatori constructivi , adică prin elemente a căror poziţie se poate regla . Deci , la proiectarea unei maşini sau aparat , trebuie rezolvate şi
următoarele probleme : - alegerea raţională a toleranţelor ; - alegerea calităţii suprafeţelor ; - determinarea erorilor ; - eliminarea sau micşorarea jocurilor ; - introducerea unor elemente de reglare şi compensare .
1.2.5.Precizia dimensională Din cauza imperfecţiunilor de execuţie şi de montaj , dimensiunile stabilite
prin calcul nu coincid perfect cu dimensiunile rezultate dupa prelucrare . De aceea , la proiectare , trebuie să fie prescrise limitele în care urmează să se încadreze dimensiunile, în funcţie de gradul de precizie cu care trebuie să fie executată piesa .
Dimensiunile rezultate din calcul şi trecute pe desen se numesc dimensiuni nominale . Dimensiunile care se obţin prin măsurarea piesei prelucrate se numesc efective . Diferenţa , A , dintre dimensiunea nominală N şi dimensiunea efectivă E , reprezintă abaterea efectivă :
A = N – E . Gradul de precizie cu care trebuie să fie executată o piesă depinde de :
• poziţia ei în ansamblu ; • condiţiile de exploatare ; • condiţiile de interschimbabilitate . şi se prescrie pentru orice dimensiune , prin două valori limită care însoţesc
cota pe desene , valori între care trebuie să fie cuprinsă dimensiunea efectivă realizată prin prelucrare .
9
Dacă dimensiunea de pe desen este diametrul unui alezaj (suprafaţa cuprinzătoare) va exista un Dmax , şi un Dmin , iar dacă este un arbore va exista un dmax, şi un dmin , trebuind să existe inegalitaţile :
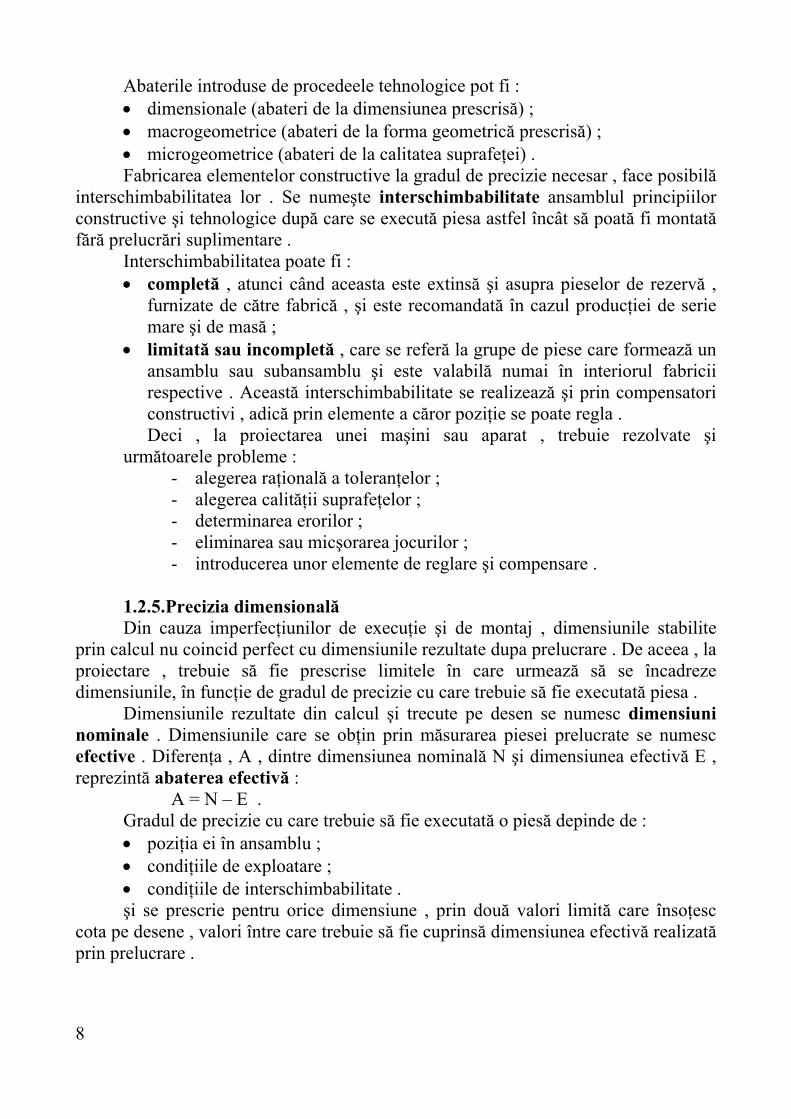
Dmax ≥ ED ≥ Dmin şi dmax ≥ Ed ≥ dmin Dacă dimensiunea este o lungime , L , trebuie să existe inegalitatea : Lmax ≥ E ≥ Lmin Se numeşte toleranţă şi se notează prin T diferenţa : TD = Dmax − Dmin sau Td = dmax − dmin
Fig.1.1
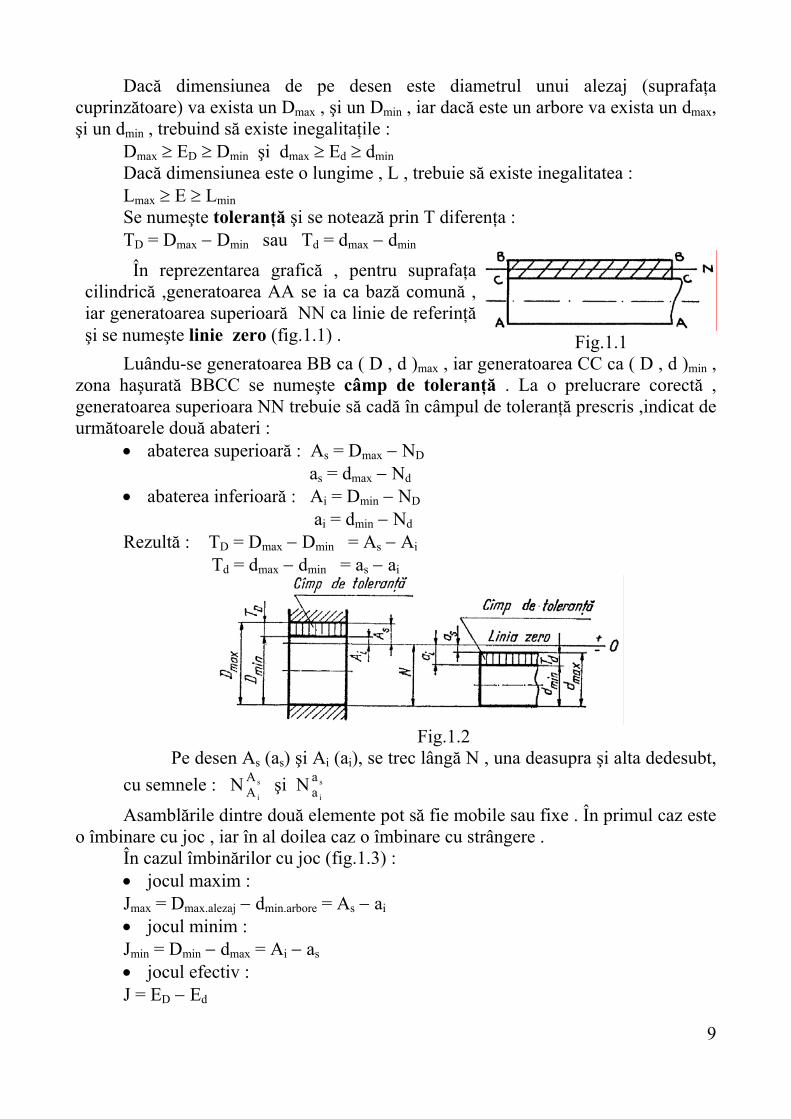
Luându-se generatoarea BB ca ( D , d )max , iar generatoarea CC ca ( D , d )min , zona haşurată BBCC se numeşte câmp de toleranţă . La o prelucrare corectă , generatoarea superioara NN trebuie să cadă în câmpul de toleranţă prescris ,indicat de următoarele două abateri :
• abaterea superioară : As = Dmax − ND as = dmax − Nd • abaterea inferioară : Ai = Dmin − ND ai = dmin − Nd Rezultă : TD = Dmax − Dmin = As − Ai
Td = dmax − dmin = as − ai
Fig.1.2
Pe desen As (as) şi Ai (ai), se trec lângă N , una deasupra şi alta dedesubt, cu semnele : N s
i
AA şi N s
i
aa
Asamblările dintre două elemente pot să fie mobile sau fixe . În primul caz este o îmbinare cu joc , iar în al doilea caz o îmbinare cu strângere .
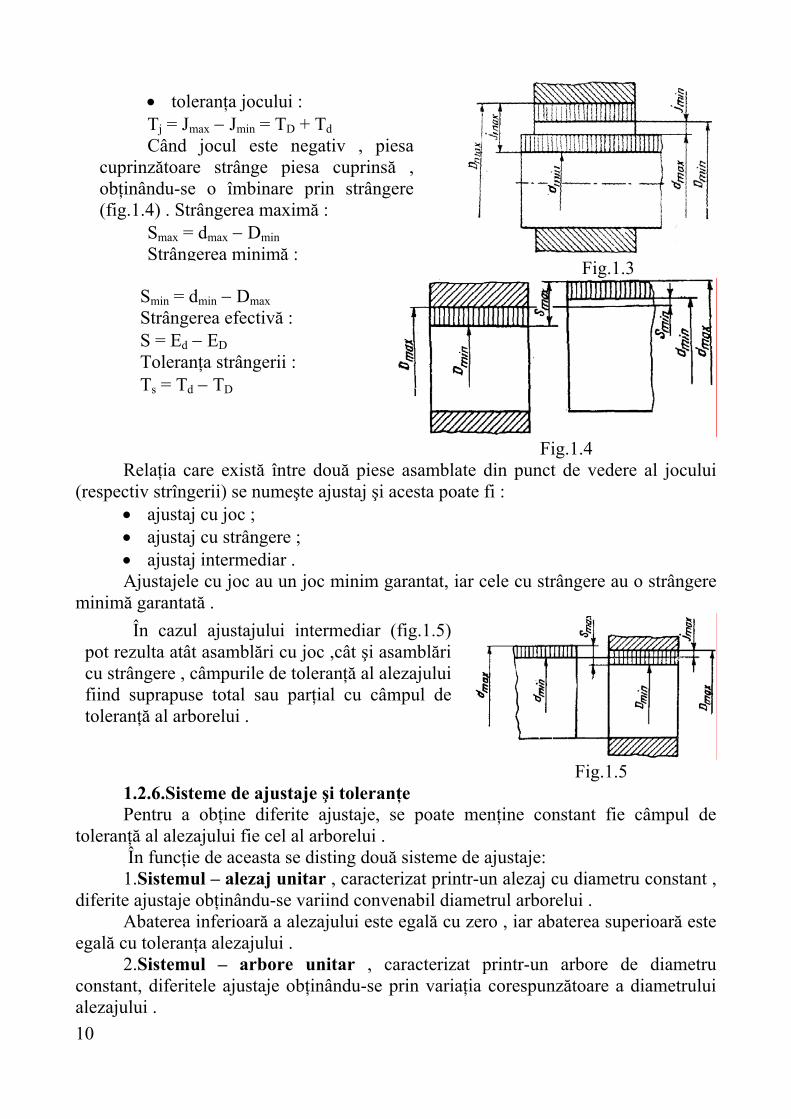
În cazul îmbinărilor cu joc (fig.1.3) : • jocul maxim : Jmax = Dmax.alezaj − dmin.arbore = As − ai
• jocul minim : Jmin = Dmin − dmax = Ai − as • jocul efectiv : J = ED − Ed
În reprezentarea grafică , pentru suprafaţa cilindrică ,generatoarea AA se ia ca bază comună , iar generatoarea superioară NN ca linie de referinţă şi se numeşte linie zero (fig.1.1) .
10
Fig.1.3
Fig.1.4
Relaţia care există între două piese asamblate din punct de vedere al jocului (respectiv strîngerii) se numeşte ajustaj şi acesta poate fi :
• ajustaj cu joc ; • ajustaj cu strângere ; • ajustaj intermediar . Ajustajele cu joc au un joc minim garantat, iar cele cu strângere au o strângere
minimă garantată .
Fig.1.5
1.2.6.Sisteme de ajustaje şi toleranţe Pentru a obţine diferite ajustaje, se poate menţine constant fie câmpul de
toleranţă al alezajului fie cel al arborelui . În funcţie de aceasta se disting două sisteme de ajustaje: 1.Sistemul – alezaj unitar , caracterizat printr-un alezaj cu diametru constant ,
diferite ajustaje obţinându-se variind convenabil diametrul arborelui . Abaterea inferioară a alezajului este egală cu zero , iar abaterea superioară este
egală cu toleranţa alezajului . 2.Sistemul – arbore unitar , caracterizat printr-un arbore de diametru
constant, diferitele ajustaje obţinându-se prin variaţia corespunzătoare a diametrului alezajului .
Smin = dmin − Dmax Strângerea efectivă : S = Ed − ED Toleranţa strângerii : Ts = Td − TD
• toleranţa jocului : Tj = Jmax − Jmin = TD + Td Când jocul este negativ , piesa
cuprinzătoare strânge piesa cuprinsă , obţinându-se o îmbinare prin strângere (fig.1.4) . Strângerea maximă :
Smax = dmax − Dmin Strângerea minimă :
În cazul ajustajului intermediar (fig.1.5) pot rezulta atât asamblări cu joc ,cât şi asamblări cu strângere , câmpurile de toleranţă al alezajului fiind suprapuse total sau parţial cu câmpul de toleranţă al arborelui .
11
Abaterea superioară a arborelui este egală cu zero iar abaterea inferioară este egală cu toleranţa arborelui . Sistemul de toleranţe şi ajustaje STAS este elaborat pe baza normelor ISO şi cuprinde dimensiunile de la 1 la 500 precum şi dimensiuni mai mici decât 1 şi mai mari de 500 .
Clasa de precizie a prelucrării suprafeţei este dată prin unitatea de toleranţă , care este dată de formula :
i = 0,45 . )d(D.001,0)d(D3 + Mărimea toleranţei pentru o prelucrare oarecare va fi : TD,d = a . i unde a reprezintă numărul unităţilor de toleranţă . Precizia de prelucrare a diferitelor elemente constructive este dată de clasa de
precizie (calităţi), fiecare din acestea fiind caracterizată de un număr de unităţi de tolerantă a .
Pentru simplificare , pentru dimensiunile cuprinse între 1 si 500 mm s-au considerat 13 intervale de dimensiuni pentru care s-au calculat 13 unităţi de toleranţă ( D s-a considerat media geometrică a intervalului ) .
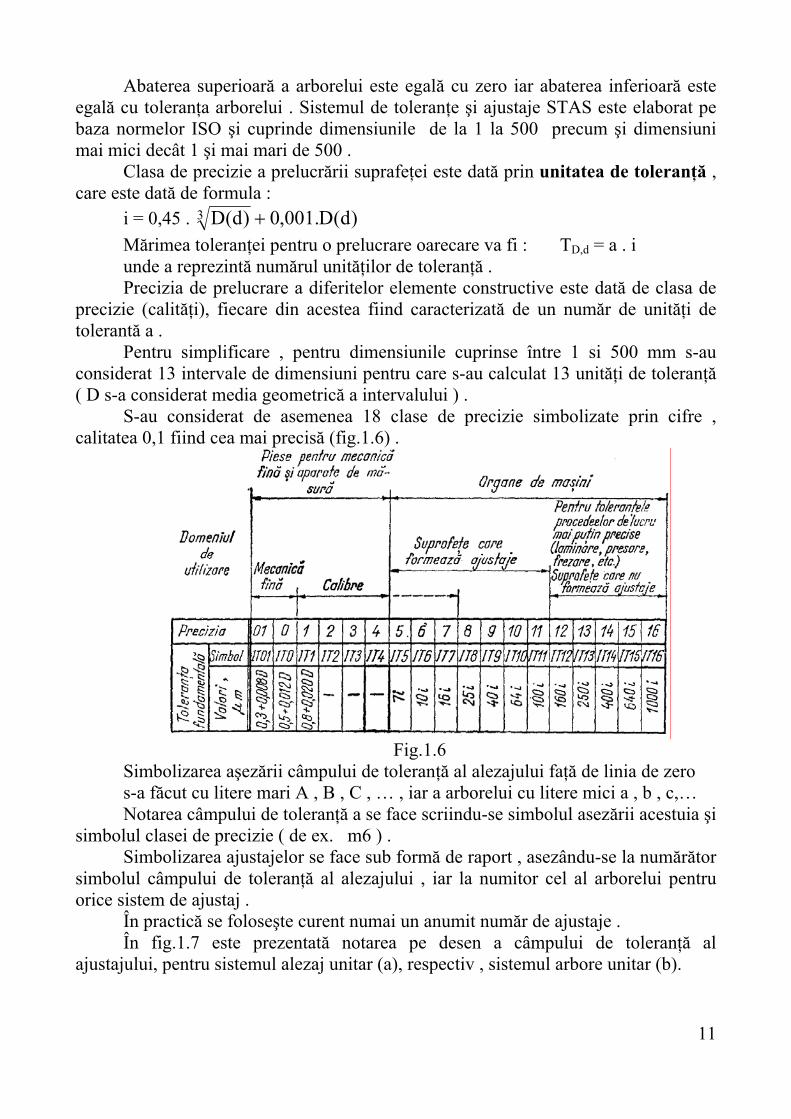
S-au considerat de asemenea 18 clase de precizie simbolizate prin cifre , calitatea 0,1 fiind cea mai precisă (fig.1.6) .
Fig.1.6
Simbolizarea aşezării câmpului de toleranţă al alezajului faţă de linia de zero s-a făcut cu litere mari A , B , C , … , iar a arborelui cu litere mici a , b , c,… Notarea câmpului de toleranţă a se face scriindu-se simbolul asezării acestuia şi
simbolul clasei de precizie ( de ex. m6 ) . Simbolizarea ajustajelor se face sub formă de raport , asezându-se la numărător
simbolul câmpului de toleranţă al alezajului , iar la numitor cel al arborelui pentru orice sistem de ajustaj .
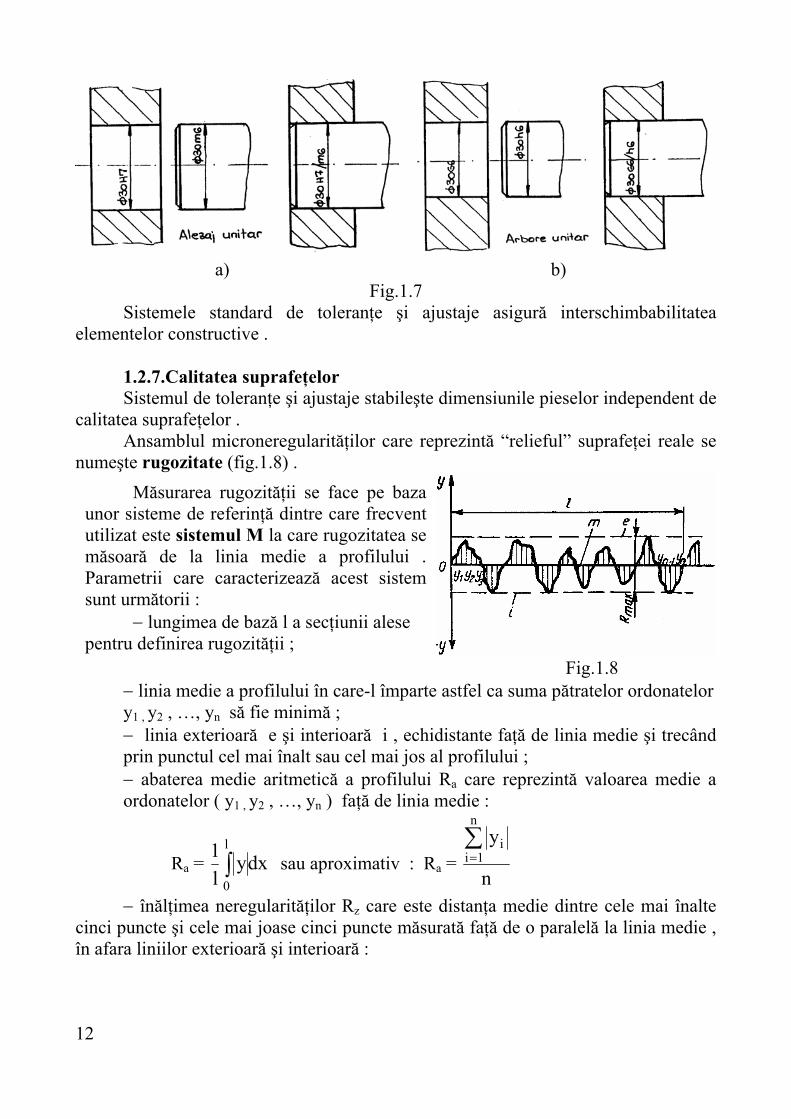
În practică se foloseşte curent numai un anumit număr de ajustaje . În fig.1.7 este prezentată notarea pe desen a câmpului de toleranţă al
ajustajului, pentru sistemul alezaj unitar (a), respectiv , sistemul arbore unitar (b).
12
a) b)
Fig.1.7 Sistemele standard de toleranţe şi ajustaje asigură interschimbabilitatea
elementelor constructive .
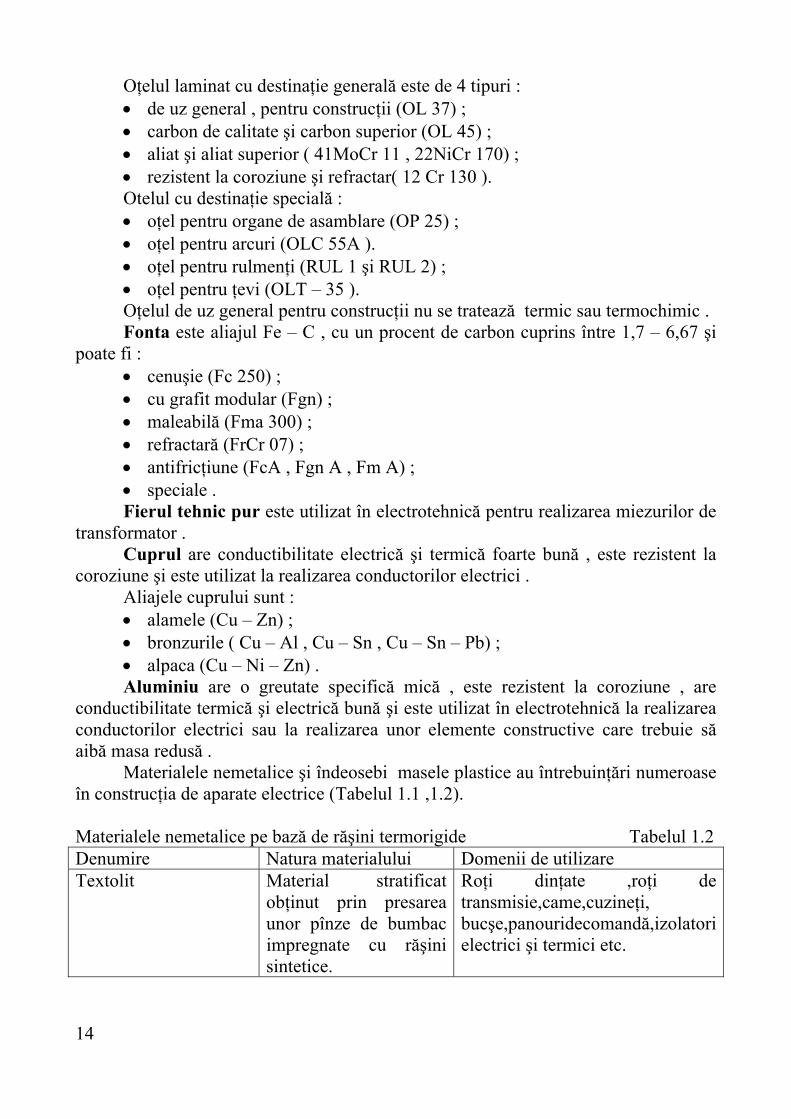
1.2.7.Calitatea suprafeţelor Sistemul de toleranţe şi ajustaje stabileşte dimensiunile pieselor independent de
calitatea suprafeţelor . Ansamblul microneregularităţilor care reprezintă “relieful” suprafeţei reale se
numeşte rugozitate (fig.1.8) .
Fig.1.8
− linia medie a profilului în care-l împarte astfel ca suma pătratelor ordonatelor y1 , y2 , …, yn să fie minimă ; − linia exterioară e şi interioară i , echidistante faţă de linia medie şi trecând prin punctul cel mai înalt sau cel mai jos al profilului ; − abaterea medie aritmetică a profilului Ra care reprezintă valoarea medie a ordonatelor ( y1 , y2 , …, yn ) faţă de linia medie :
Ra = dxyl1 l
0∫ sau aproximativ : Ra =
n
yn
1ii∑
=
− înălţimea neregularităţilor Rz care este distanţa medie dintre cele mai înalte cinci puncte şi cele mai joase cinci puncte măsurată faţă de o paralelă la linia medie , în afara liniilor exterioară şi interioară :
Măsurarea rugozităţii se face pe baza unor sisteme de referinţă dintre care frecvent utilizat este sistemul M la care rugozitatea se măsoară de la linia medie a profilului . Parametrii care caracterizează acest sistem sunt următorii :
− lungimea de bază l a secţiunii alese pentru definirea rugozităţii ;

13
Fig.1.9
1.2.8.Materiale utilizate în construcţia de maşini şi aparate Alegerea materialului pentru organele de maşini constituie o fază dificilă şi
importantă în procesul de proiectare al acestora , întrucăt trebuie respectate o serie de criterii legate de utilizarea şi fabricarea acestora .
Din punct de vedere funcţional , pentru o comportare bună în exploatare , este necesar ca materialul să posede rezistenţe admisibile mari , la o greutate specifică redusă.
Din punct de vedere tehnologic trebuie considerate posibilităţile de prelucrare a materialelor (turnare , presare , laminare , stanţare , aşchiere etc.) , de protecţie anticorozivă prin acoperiri chimice sau galvanice etc.
Din punct de vedere economic , trebuie utilizate materiale care au preţul de cost cel mai scăzut şi nu sunt deficitare . Materialele cele mai folosite în construcţia maşinilor şi aparatelor electrice sunt :
• oţelurile carbon şi aliajele acestora cu : crom , nichel , mangan , vanadiu , molibden, siliciu etc. ;
• materiale neferoase (cupru , aluminiu etc.) , aliajele pe bază de cupru (alama, bronzul , compoziţiile pentru lagăre etc.) şi aliajele pe bază de aluminiu ;
• materialele nemetalice dintre care se remarcă : materialele termoplastice , cauciucul , azbestul , sticla , textolitul , bachelita etc.
Oţelul , materialul cel mai întrebuinţat în construcţia de maşini şi aparate , este un aliaj , Fe – C , cu procentul de carbon până la 1,7 şi poate fi :
a) Oţel turnat în piese : - nealiat : - de uz general (OT 40 – 1) ;
- de calitate (OT 40 – 2) ; - superior ( OT 40 – 3) ; - aliat : - pentru construcţia de maşini (T 20 Mr 14) ; - refractar şi anticoroziv (T 20 MoCr); - inoxidabil (T 15 Cr 200) ; b) Oţel laminat :
- cu destinaţie generală ; - cu destinaţie specială ; - pentru scule .
Rz = 5
)RRRRR()RRRRR( 10864297531 ++++−++++
− înălţimea maximă a neregularităţilor Rmax , care este distanţa dintre liniile exterioară şi interioară . Practic , rugozitatea se defineşte fie prin Ra , fie prin Rz . Notarea rugozităţii pe desene se face prin înscrierea valorii Ra fără simbol sau a valorii Rz cu simbol (fig.1.9) .
14
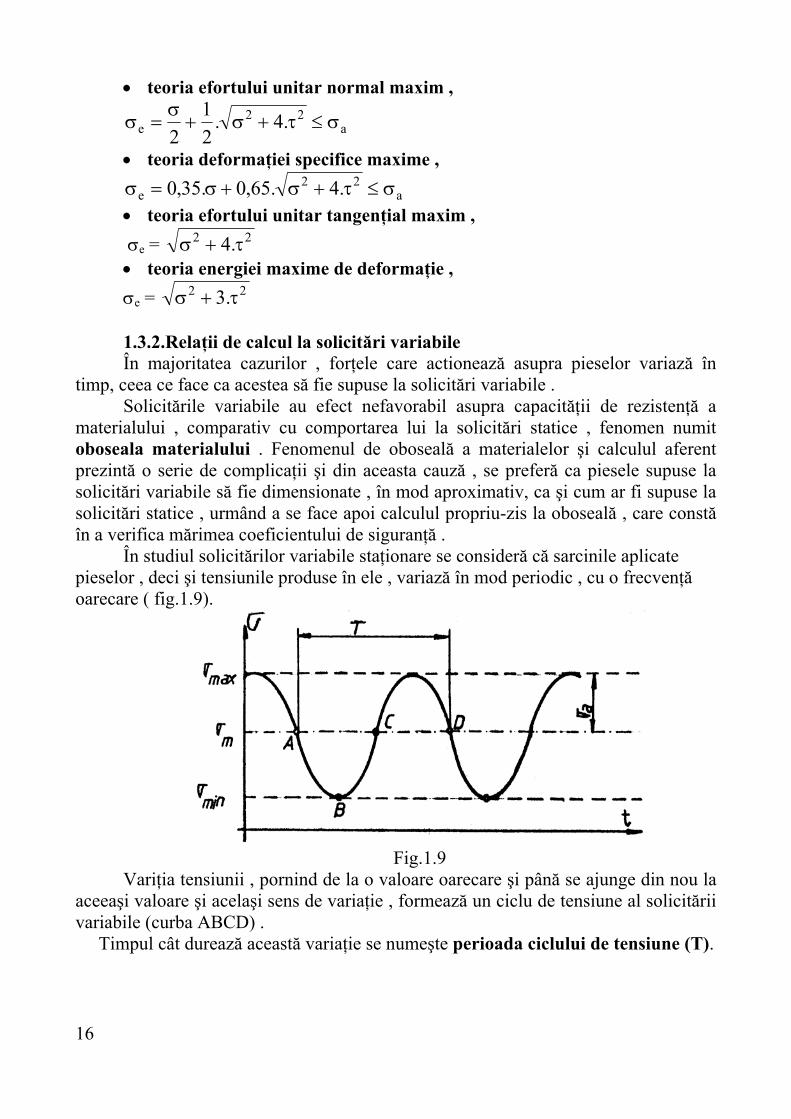
Oţelul laminat cu destinaţie generală este de 4 tipuri : • de uz general , pentru construcţii (OL 37) ; • carbon de calitate şi carbon superior (OL 45) ; • aliat şi aliat superior ( 41MoCr 11 , 22NiCr 170) ; • rezistent la coroziune şi refractar( 12 Cr 130 ). Otelul cu destinaţie specială : • oţel pentru organe de asamblare (OP 25) ; • oţel pentru arcuri (OLC 55A ). • oţel pentru rulmenţi (RUL 1 şi RUL 2) ; • oţel pentru ţevi (OLT – 35 ). Oţelul de uz general pentru construcţii nu se tratează termic sau termochimic . Fonta este aliajul Fe – C , cu un procent de carbon cuprins între 1,7 – 6,67 şi
poate fi : • cenuşie (Fc 250) ; • cu grafit modular (Fgn) ; • maleabilă (Fma 300) ; • refractară (FrCr 07) ; • antifricţiune (FcA , Fgn A , Fm A) ; • speciale . Fierul tehnic pur este utilizat în electrotehnică pentru realizarea miezurilor de
transformator . Cuprul are conductibilitate electrică şi termică foarte bună , este rezistent la
coroziune şi este utilizat la realizarea conductorilor electrici . Aliajele cuprului sunt : • alamele (Cu – Zn) ; • bronzurile ( Cu – Al , Cu – Sn , Cu – Sn – Pb) ; • alpaca (Cu – Ni – Zn) . Aluminiu are o greutate specifică mică , este rezistent la coroziune , are
conductibilitate termică şi electrică bună şi este utilizat în electrotehnică la realizarea conductorilor electrici sau la realizarea unor elemente constructive care trebuie să aibă masa redusă .
Materialele nemetalice şi îndeosebi masele plastice au întrebuinţări numeroase în construcţia de aparate electrice (Tabelul 1.1 ,1.2).
Materialele nemetalice pe bază de răşini termorigide Tabelul 1.2 Denumire Natura materialului Domenii de utilizare Textolit Material stratificat
obţinut prin presarea unor pînze de bumbac impregnate cu răşini sintetice.
Roţi dinţate ,roţi de transmisie,came,cuzineţi, bucşe,panouridecomandă,izolatori electrici şi termici etc.
15
Pertinax Material stratificat obţinut prin presarea unor foi de hârtie, impregnate cu răşini sintetice.
Bachelită Masă plastică realizată dintr-o răşină sintetică tare.
Accesorii şi elemente izolatoare în industria electrotehnică.
Materiale plastice pe bază de polimeri termoplastici Tabelul 1.3 Denumire Domenii de utilizare Policlorura de vinil , polietilena Ţevi,rezervoare,carcase etc. Polipropilena Carcase,piese ştanţate,protecţie prin placare
etc. Policarbonaţi,polistiren,fluoroplaste (teflon)
Impregnanţi,lacuri,fire,foi,plăci,bare,garnituri de etanşare,organe diverse.
Poliamide (relon,kapron,nylon) Roţi dinţate,material antifricţiune pentru lagăre,bucşe,ţevi etc.
1.3.Calculul de rezistenţă al organelor de maşini 1.3.1.Relaţii de bază pentru calculul de rezistenţă la solicitări statice
Solicitările din organele de maşini pot fi simple sau compuse . În cazul solicitărilor simple , relaţiile de calcul sunt cunoscute din “Rezistenţa materialelor” şi sunt prezentate în tabelul 1.1. Relaţii de calcul pentru cele mai frecvente solicitări simple Tabelul 1.1. Felul solicitării Efortul unitar Deformaţia Energia de deformaţie Întindere compresiune A
Ft =σ l.
El.
A.El.Pl ε=
σ==∆ L =
E.2V.2σ
Forfecare simplă AF
t =τ − L =
G.2V.2
fτ
Răsucire
p
tr W
M=τ
p
t
I.Gl.M
=θ θ= .M.21L t
Încovoiere WMi
i =σ I.E
Mdx
yd i2
2−= f.F.
21L =
În cazul solicitărilor compuse, dimensiunile preliminare se stabilesc pe baza
uneia din solicitările simple , prezentă cel mai mult în element şi apoi se face verificarea la eforturi compuse (echivalente) în secţiunea periculoasă , calculând efortul unitar maxim echivalent pe baza uneia din cele patru teorii de rupere :
16
• teoria efortului unitar normal maxim ,
a22
e .4.21
2σ≤τ+σ+
σ=σ
• teoria deformaţiei specifice maxime ,
a22
e .4.65,0.35,0 σ≤τ+σ+σ=σ • teoria efortului unitar tangenţial maxim , σe = 22 .4 τ+σ • teoria energiei maxime de deformaţie , σe = 22 .3 τ+σ 1.3.2.Relaţii de calcul la solicitări variabile În majoritatea cazurilor , forţele care actionează asupra pieselor variază în
timp, ceea ce face ca acestea să fie supuse la solicitări variabile . Solicitările variabile au efect nefavorabil asupra capacităţii de rezistenţă a
materialului , comparativ cu comportarea lui la solicitări statice , fenomen numit oboseala materialului . Fenomenul de oboseală a materialelor şi calculul aferent prezintă o serie de complicaţii şi din aceasta cauză , se preferă ca piesele supuse la solicitări variabile să fie dimensionate , în mod aproximativ, ca şi cum ar fi supuse la solicitări statice , urmând a se face apoi calculul propriu-zis la oboseală , care constă în a verifica mărimea coeficientului de siguranţă .
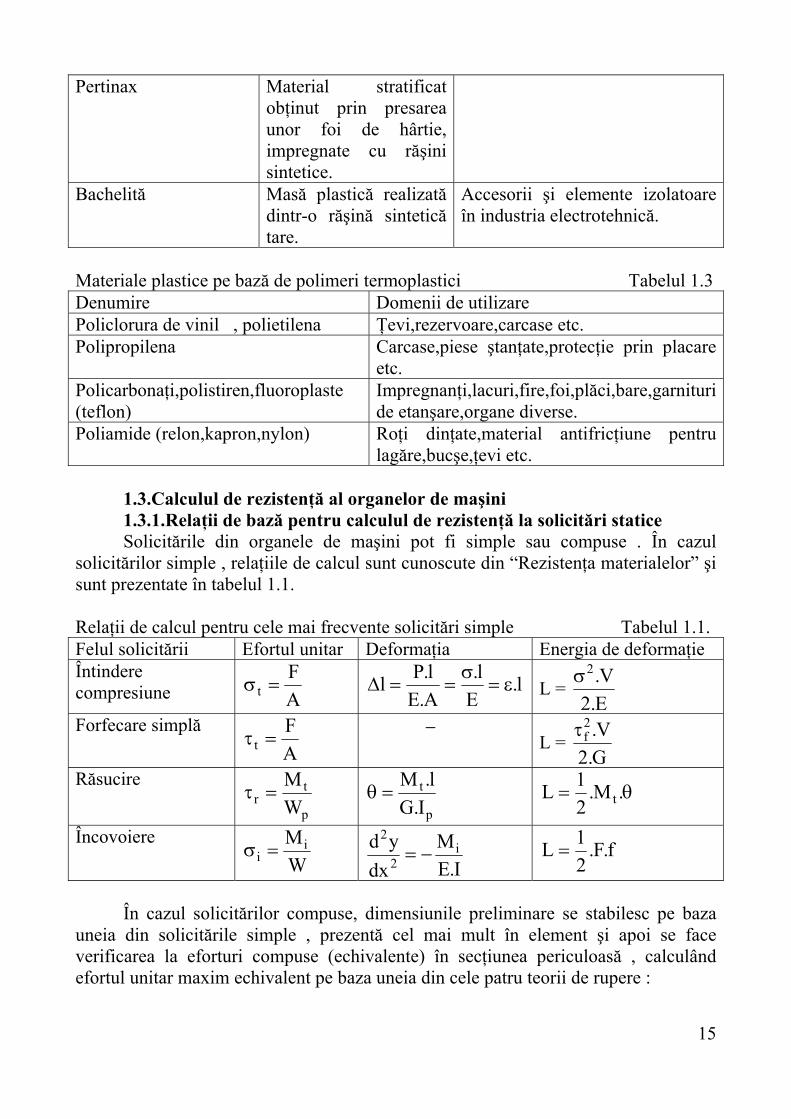
În studiul solicitărilor variabile staţionare se consideră că sarcinile aplicate pieselor , deci şi tensiunile produse în ele , variază în mod periodic , cu o frecvenţă oarecare ( fig.1.9).
Fig.1.9
Variţia tensiunii , pornind de la o valoare oarecare şi până se ajunge din nou la aceeaşi valoare şi acelaşi sens de variaţie , formează un ciclu de tensiune al solicitării variabile (curba ABCD) . Timpul cât durează această variaţie se numeşte perioada ciclului de tensiune (T).
17
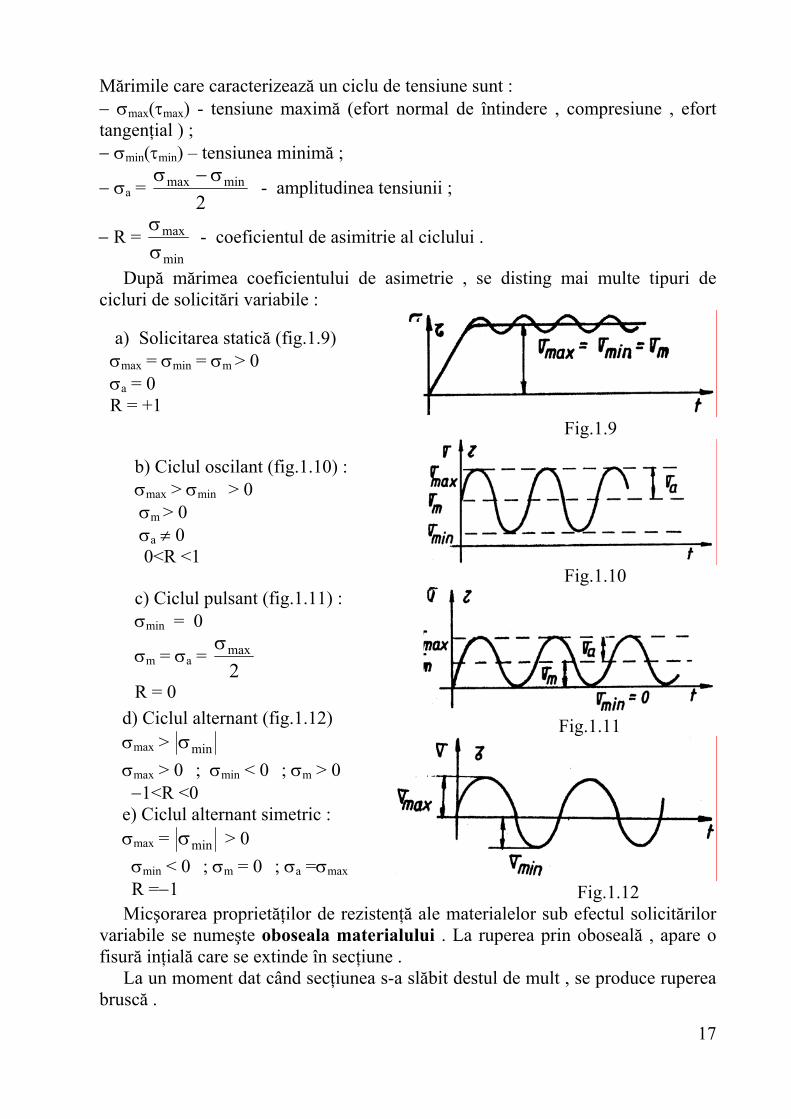
Mărimile care caracterizează un ciclu de tensiune sunt : − σmax(τmax) - tensiune maximă (efort normal de întindere , compresiune , efort tangenţial ) ; − σmin(τmin) – tensiunea minimă ;
− σa = 2
minmax σ−σ - amplitudinea tensiunii ;
− R = min
max
σσ
- coeficientul de asimitrie al ciclului .
După mărimea coeficientului de asimetrie , se disting mai multe tipuri de cicluri de solicitări variabile :
Fig.1.9
Fig.1.10
Fig.1.11
Fig.1.12
Micşorarea proprietăţilor de rezistenţă ale materialelor sub efectul solicitărilor variabile se numeşte oboseala materialului . La ruperea prin oboseală , apare o fisură inţială care se extinde în secţiune .
La un moment dat când secţiunea s-a slăbit destul de mult , se produce ruperea bruscă .
a) Solicitarea statică (fig.1.9) σmax = σmin = σm > 0 σa = 0 R = +1
b) Ciclul oscilant (fig.1.10) : σmax > σmin > 0 σm > 0 σa ≠ 0 0<R <1
c) Ciclul pulsant (fig.1.11) : σmin = 0
σm = σa = 2maxσ
R = 0 d) Ciclul alternant (fig.1.12) σmax > minσ σmax > 0 ; σmin < 0 ; σm > 0 −1<R <0 e) Ciclul alternant simetric : σmax = minσ > 0 σmin < 0 ; σm = 0 ; σa =σmax R =−1
18
Fenomenul de oboseală se explică prin existenţa microfisurilor la suprafaţa piesei, acolo unde eforturile unitare de încovoiere şi răsucire sunt maxime , prin existenţa zonelor de concentrare a eforturilor unitare , prin prezenţa incluziunilor nemetalice în metal etc .
Tensiunea maximă pe care un punct al unei secţiuni date , supuse unui ciclu de tensiuni variabilă de caracteristică R , în conditii ideale de încercare , o poate suporta fără apariţia fenomenului de deteriorare prin oboseală , depinde de numărul de cicluri de solicitare N şi se nueşte rezistenţă la oboseală σR.
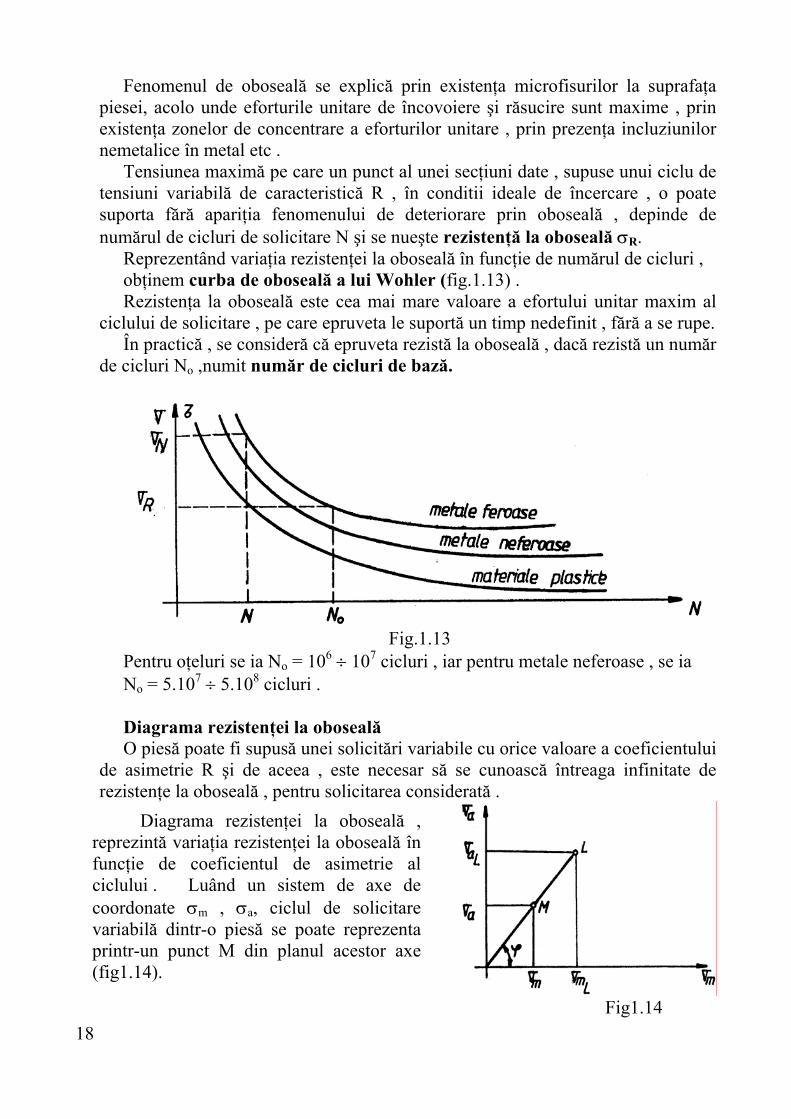
Reprezentând variaţia rezistenţei la oboseală în funcţie de numărul de cicluri , obţinem curba de oboseală a lui Wohler (fig.1.13) . Rezistenţa la oboseală este cea mai mare valoare a efortului unitar maxim al
ciclului de solicitare , pe care epruveta le suportă un timp nedefinit , fără a se rupe. În practică , se consideră că epruveta rezistă la oboseală , dacă rezistă un număr
de cicluri No ,numit număr de cicluri de bază.
Fig.1.13
Pentru oţeluri se ia No = 106 ÷ 107 cicluri , iar pentru metale neferoase , se ia No = 5.107 ÷ 5.108 cicluri .
Diagrama rezistenţei la oboseală O piesă poate fi supusă unei solicitări variabile cu orice valoare a coeficientului
de asimetrie R şi de aceea , este necesar să se cunoască întreaga infinitate de rezistenţe la oboseală , pentru solicitarea considerată .
Fig1.14
Diagrama rezistenţei la oboseală , reprezintă variaţia rezistenţei la oboseală în funcţie de coeficientul de asimetrie al ciclului . Luând un sistem de axe de coordonate σm , σa, ciclul de solicitare variabilă dintr-o piesă se poate reprezenta printr-un punct M din planul acestor axe (fig1.14).

19
Ducând linia OM , se poate scrie relaţia dintre înclinarea ei şi coeficientul de
asimetrie :
tg ϕ = R1R1
minmax
minmax
m
a
+−
=σ+σσ−σ
=σσ
Prelungind dreapta OM , se poate găsi un punct L , corespunzător unui ciclu
limită , la care tensiunea maximă este egală cu rezistenţa la oboseală a materialului , corespunzătoare coeficientului de asimetrie dat .
Locul geometric al punctelor L reprezintă diagrama rezistenţelor la oboseală, sau curba ciclurilor limită .
Un punct oarecare M din interiorul diagramei , reprezintă un ciclu nepericulos , pe când un punct N din afara ei , reprezintă un ciclu de solicitări care conduce la ruperea prin oboseală (fig.1.15) .
Fig.1.15 Fig.1.16 Punctul A reprezintă ciclul alternant simetric, punctul B – ciclul pulsant , iar
punctul C – solicitarea statică . Pentru simplificarea calculelor , diagrama ciclurilor limită , pentru o secţiune
dată, poate fi schematizată prin (fig.1.16): a) o linie frântă , când se cunosc caracteristicile mecanice σ−1, σo , σ+1 ; b) o linie dreaptă când se cunosc σ−1 şi σ+1. Schematizarea prin două drepte are avantajul utilizării mai raţionale a
capacităţii portante a materialului cu maxim 50 % . Rezistenţa la oboseală este o mărime complexă care depinde de o multitudine
de factori care se pot împărţi în : • constructivi : − concentratori de tensiuni ;
− dimensiunile piesei ; • tehnologici : − structura materialului ;
− tehnologia semifabricatului ; − tensiunile remanente ; − calitatea suprafeţei .

20
• condiţii de lucru : − felul solicitării ; − asimetria ciclului ; − frecvenţa solicitării ; − suprasolicitările ; − acţiunile mediilor corozive ; − temperatura .
Unii dintre aceşti factori pot fi luaţi în considerare , cantitativ , în calculele de rezistenţă; de alţii se poate ţine seama la alegerea materialului , a formei piesei şi a tehnologiei de fabricaţie .
1.3.3.Principii generale de calcul al organelor de maşini La dimensionarea sau verificarea organelor de maşini , acestea trebuie să
îndeplinească condiţii : a) de rezistenţă ; b) de rigiditate ; c) de stabilitate . O piesă îndeplineşte condiţiile de rezistenţă, atunci când tensiunile care se
produc în ea , datorită sarcinilor , nu depăşesc anumite limite , stabilite convenţional , dar corelate cu caracteristicile mecanice ale materialelor .
Se numeşte rezistenţă admisibilă valoarea aleasă în calcul , pe baza practicii , pentru tensiunea maximă care se poate produce într-o piesă , în condiţii date de material şi solicitare .
După cum este cunoscut , materialele se împart în două grupe : • ductile sau tenace , care se deformează mult înainte de rupere (oţeluri de
rezistenţă mică şi mijlocie ) ; • fragile , care se deformează puţin , fără zone de gâtuire , înainte de rupere
(fonta , ceramica etc.) . Rezistenţa admisibilă poate fi definită în comparaţie cu o stare limită priculoasă.La materialele tenace, care au , de obicei, o limită de curgere , rezistenţă admisibilă se defineşte prin relaţia :
σa =c
c
cσ
unde cc este coeficientul de siguranţă faţă de limita de curgere .
La materialele fragile , rezistenţa admisibilă se raportează la rezistenţa de
rupere : σa =r
r
cσ
La alegerea rezistenţei admisibile , deci a coeficienţilor de siguranţă , trebuie să se ţină seama de următorii factori :
• natura materialului ; • tratamentul termic ; • durata de folosire a pisei ; • modul de acţionare a sarcinilor în timp ; • modul de evaluare a sarcinilor şi de realizare a ipotezelor de calcul ; • felul solicitării (tracţiune , compresiune , încovoiere , răsucire ) ;
21
• temperatură . În calculul de rezistenţa materialelor , la dimensionare , proiectantul consideră
rezistenţa admisibilă ca o constantă , în baza căreia dimensionează piesa . În calculul de verificare , tensiunea efectivă produsă în piesă trebuie să fie
inferioară rezistenţei admisibile sau cel mult egală cu ea . 1.4.Fiabilitatea organelor de maşini şi a sistemelor
Fiabilitatea este proprietatea unui produs , exprimată prin probabilitatea ca acesta să îndeplinească fără întreruperi în funcţionare o funcţie impusă , în condiţii prescrise, în cursul unei perioade de timp date .
Măsura fiabilităţii unui produs înseamnă determinarea frecvenţei cu care se produc defectările .Dacă nu se produc defectări , fiabilitatea este 100% .
Dacă frecvenţa defectărilor este ridicată , produsul nu este fiabil . Prin defectare se înţelege pierderea aptitudinii unui produs de a-şi îndeplini
funcţionarea cerută , în condiţii date . Uneori , în loc de defectare ,se poate utiliza termenul de “deteriorare” . Defectările se pot clasifica :
a) după posibilitatea prevederii apariţiei defectului , defectarea poate fi : • bruscă (imprevizibilă ) , care nu poate fi prevăzută în urma verificării
anterioare a caracteristicilor , deoarece modificările acestora decurg foarte rapid ;
• progresivă , care poate fi prevăzută , deoarece modificările caracteristicilor decurg lent , fiind legate de uzura pieselor , îmbătrânirea materialelor , dereglări etc.
b) după gradul în care dispare funcţia impusă sistemului sau elementului mecanic,defectarea poate fi :
• parţială , atunci când are loc o modificare a valorii reale a unuia sau mai multor parametri , dincolo de limitele impuse de criteriile de defectare , fără dispariţia totală a funcţiei cerute ;
• totală , atunci când are loc o dispariţie totală a funcţiei cerute . c) după interdependenţa cu alte dispozitive , defectarea poate fi :
• independentă , atunci când nu este cauzată de defectarea altor elemente, cu care interacţionează ;
• dependentă , atunci când este cauzată de defectarea altui element ; Se mai definesc următorii termeni : Rata de defectare , pentru o perioadă dată din viaţa unui sistem mecanic ,
reprezintă raportul dintre numărul total de defectări din eşantion şi durata cumulată pe eşantion .
Timpul mediu pănă la defectare , reprezintă raportul dintre durata cumulată observată pe un eşantion şi numărul total de defectări din eşantion , într-o perioadă dată, şi în conditii specificate .
Timpul mediu între defectări , reprezintă valoarea medie a timpilor dintre două defectări consecutive , calculate ca raportul dintre durata cumulată şi numărul de defectări din eşantion în condiţii date şi pentru o perioadă dată .
22
Durata medie de viaţă , reprezintă valoarea medie a duratelor până la defectare , pentru toate produsele unui eşantion , în condiţii date . Redundanţă . Existenţa într-un sistem a mai multor mijloace pentru realizarea unei funcţii specifice . Pentru a aprecia fiabilitatea unui produs , exprimată cantitativ printr-un număr în intervalul închis [ 0,1 ] , este necesar să se stabilească criteriile de fiabilitate ale acestuia.
În termenii cei mai simpli , criteriile de fiabilitate sunt : • performanţele satisfăcătoare , fără defectări în timpul utilizării ; • capacitatea de a realiza aceste performanţe la momentul dorit .
Fiabilitatea unui ansamblu depinde de fiabilitatea elementelor sale componente. Să considerăm un număr de produse ( maşini , elemente ) , care funcţionează după un anumit ciclu şi în anumite condiţii de mediu . Dupa t ore de funcţionare se analizează fiecare produs în raport cu un criteriu de funcţionare şi se stabileşte că numai n produse mai pot lucra în continuare corect , restul fiind apreciate ca defecte .
Rezultă fiabilitatea : F = bn
n
Daca funcţionarea continuă , se vor defecta mai multe produse , şi deci fiabilitatea va scădea , fiind funcţie de timp .
Dacă se notează cu λ rata de defectare (număr de defectări , în procente sau relativ, pe unitatea de timp sau de distanţă ) şi dacă după t ore de lucru mai funcţionează corect şi precis încă n produse , iar în intervalul dt se mai defectează încă dn produse , atunci rata de defectare :
n1.
dtdn)t(f −==λ şi − ∫∫ =λ
n
n
t
0 bn
dndt.
În cazul unei rate constante a defectărilor , distribuţia timpului de bună funcţionare este exponenţială . Relaţia exponenţială a fiabilităţii F este :
F = ∫ λ−t
0
dte
Cunoaşterea evoluţiei în timp a defectărilor , necesară pentru calculul fiabilităţii , implică cunoaşterea unor aspecte elementare cu privire la repartiţiile evenimentelor cu caracter aleatoriu . În literatura de specialitate sunt menţionate numeroase tipuri de repartiţii : binomială , Poisson , uniformă , normală , Weibull etc.
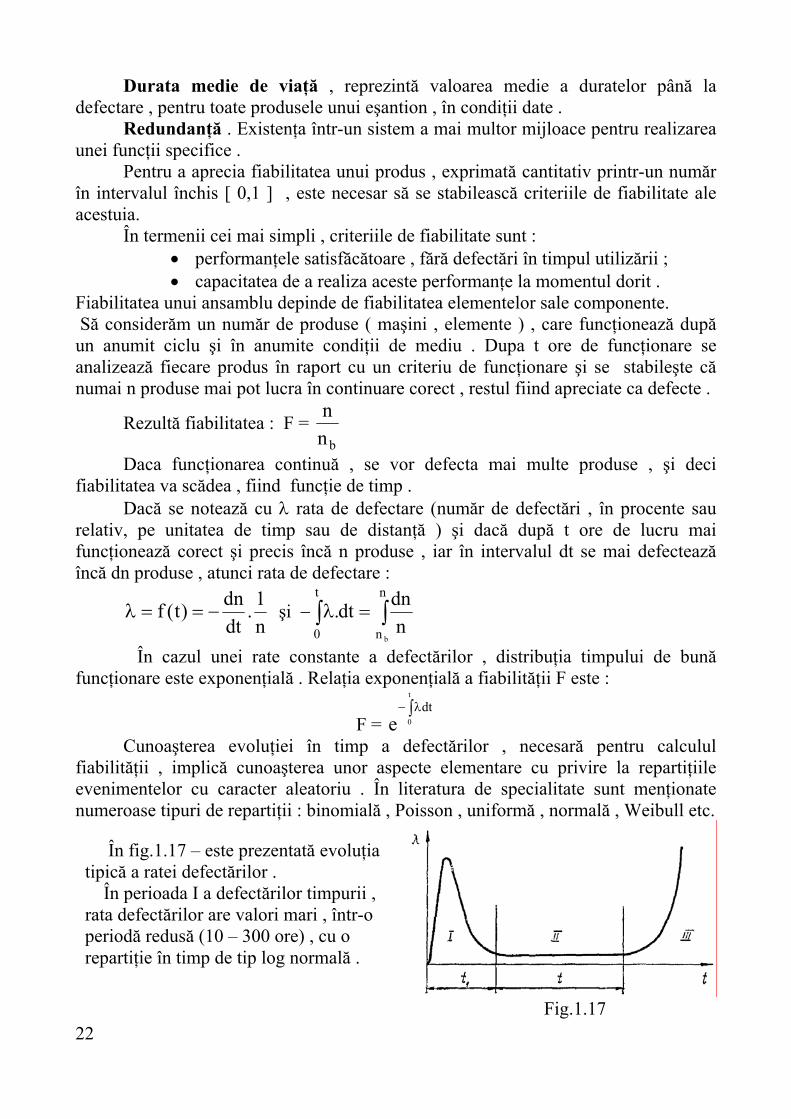
Fig.1.17
În fig.1.17 – este prezentată evoluţia tipică a ratei defectărilor . În perioada I a defectărilor timpurii , rata defectărilor are valori mari , într-o periodă redusă (10 – 300 ore) , cu o repartiţie în timp de tip log normală .
23
În perioada II de exploatare , rata defectărilor este constantă şi are valori reduse datorită unor accidente ; defectările producându-se brusc . În perioada a III-a a defectărilor târzii , apar defectări datorită uzurii si fenomenului de oboseală , care evoluează cu o repartiţie asimilată cu distribuţia Weibull, deci cu o rată a defectărilor în creştere rapidă şi continuă .
Dacă în perioada de exploatare rata defectărilor este constantă , .const)t( =λ ,rezultă :
F = te λ− şi pentru λ.t << 1 ⇒ F = 1 − λ . t Fiabilitatea unui sistem complex se exprimă în funcţie de fiabilitatea
elementelor componente ţinând seama de modul de legare a elementelor sistemului , din punct de vedere al fiabilităţii . În cazul montajului în serie , defectarea unui element are drept consecinţă defectarea sistemului . Dacă fiabiltăţile elementelor sunt independente între ele , atunci fiabilitatea sistemului este :
F = F1. F2… Fn unde Fi este fiabilitatea sistemului . În cazul montajului în paralel , toate elemetele componente trebuie să se
defecteze pentru a determina defectarea sistemului . În acest caz : F =1 −(1− F1). (1−F2)…(1−Fn) Rezultă că fiabilitatea sistemului este mai mare decât cea a elementelui cu
fiabilitatea cea mai mare .
24
Capitolul 2
MECANISME 2.1. Structura mecanismelor
Mecanismul este o combinaţie de corpuri materiale , numite elemente , care posedă mişcări determinate şi au rolul de a transmite şi transforma mişcarea . Mecanismele sunt realizate din corpuri materiale care pot fi legate rigid între ele sau se pot mişca relativ . Elementul cinematic reprezintă un corp sau mai multe corpuri materiale, care formează un rigid mobil şi care intră în componenţa unui mecanism . Cupla cinematică reprezintă legătura mobilă şi directă dintre două elemente cinmatice , deci , între elementele cinematice trebuie să existe o mişcare relativă ( legătură mobilă ) , iar suprafeţele lor trebuie să se găsească în contact direct (legătură directă ) . Cuplele cinematice se clasifică după următoarele criterii :
a) După numărul gradelor de libertate pe care le interzic legăturile cuplelor , acestea se împart în 5 clase , clasa n = 6 – 1 , în care 1 reprezintă numărul gradelor de libertate permise de cuplă .
Obs. Prin numărul gradelor de libertate se înţelege numărul de parametri geometrici independenţi , care permit determinarea poziţiei relative a unui element. Un element liber are 6 grade de libertate . b) După natura contactului dintre elemente , cuplele pot fi :
- superioare – atunci când contactul se face într-un punct sau după o linie ; - inferioare – când contactul se realizează după o suprafaţă . Mecanismele care au cuple superioare , au un număr mic de elemente , dar au o capacitate portantă mai mică .
c) Cuplele po fi : - închise – dacă contactul dintre elementele cuplei este garantat prin forma
constructivă a elementelor ; - deschise – când acest contact este garantat prin acţiunea unei forţe ( forţa elastică , forţa gravitaţională ) ;
d) După caracterul mişcării relative dintre elemente , cuplele pot fi : - plane – când traictoriile tuturor punctelor sunt în acelaşi plan sau în plane paralele ;
- spaţiale – când traictoriile sunt în plane diferite. Lanţul cinematic reprezintă o reuniune de elemente cinematice legate între
ele prin cuple cinematice . Lanţurile cinematice pot fi deschise sau închise , simple sau complexe , plane sau spaţiale (fig. 2.1)

25
Exemple de cuple cinematice uzuale Tabelul 2.1 Reprezentare schematică Denumirea cuplei Clasificare
Contact sferă plan - clasa 1-a - superioară - spatială - deschisă
Contact cilindru plan - clasa 2-a - superioară - spatială - deschisă
Cupla sferică - clasa 3-a - inferioară - spatială - închisă
Cupla plan-plan - clasa 3-a - inferioară - plană - deschisă
Cupla cilindrică - clasa 4-a - inferioară - spaţială - închisă
Cupla de rotaţie - clasa 5-a - inferioară - plană - închisă

26
Tabelul 2.1 (continuare)
Cupla de translaţie - clasa 5-a - inferioară - plană - închisă
Cupla superioară plană - clasa a 4-a - superioară - plană - deschisă
Cupla elicoidală (şurub piuliţă)
- clasa a 4-a - inferioară - spaţială - închisă
închis deschis complex
Fig. 2.1 În reprezentarea simbolică , elementele cinematice sunt nişte segmente de
dreaptă sau figuri geometrice ( triunghiuri haşurate ) . Mecanismul este un lanţ cinematic care îndeplineşte următoarele condiţii:
• este închis ; • are un element de referinţă , considerat fix , numit bază sau batiu, în
raport cu care se studiază mişcarea celorlalte elemente ; • are stabilit un număr de elemente conducătoare , în aşa fel încât mişcarea
celorlalte elemente să fie determinată .
a) Mecanismul patrulater b) Mecanismul cu cilindru oscilant
Fig. 2.2
27
Lanţul cinematic închis cu 4 elemente (fig.2.2.a) , devine mecanismul patrulater dacă se alege elementul 1 ca element conducător şi se ia elementul 4 ca batiu.În acest caz , cunoscănd unghiul ϕ1, care defineşte poziţia elementului conducător, atunci poziţia elementului 2 şi 3 este determinată şi se poate găsi grafic . La mecanismul din figura 2.2.b cupla de translaţie B este cuplă conducătoare , acţionarea mecanismului făcîndu-se pneumatic sau hidraulic.
Gradul de mobilitate M al mecanismului reprezintă numărul de parametri geometrici independenţi care determină poziţia tuturor elementelor mobile, faţă de elementul fix . În construcţia mecanismelor , de multe ori , tuturor elementelor cinematice componente li se impun condiţii de legătură comune .
De exemplu, la mecanismele plane , nici un element cinematic nu poate executa mişcări de translaţie de-a lungul axei Ox , perpendiculară pe planul mecanismului şi nici mişcări de rotaţie în jurul axei Oz şi Oy , conţinute în planul lui. Deci , în cazul acestor mecanisme , toate elementele au trei condiţii comune de legătură . După numărul condiţiilor comune de legătură impuse tuturor elementelor , mecanismele se clasifică în 5 familii , numărul familiei f fiind egal cu numărul condiţiilor de legătură impuse tuturor elementelor .
Deci , mecanismele plane sunt din familia 3 . Mecanismele din familiile 0 ,1 şi 2 sunt spaţiale , iar cele din familia 4 sunt plane . Pentru calculul gradului de mobilitate al unui mecanism de o familie oarecare f , se face ipoteza ca elementelor li s-au suprimat f grade de libertate (legăturile comune ) . În această ipoteză , un element liber are 6 – f grade de libertate . Notând cu ci numărul cuplelor de clasa i , şi având în vedere că fiecare dintre ele reduce i grade de libertate , rezultă că toate cuplele din clasa i reduc i.ci grade de libertate .
Având în vedere cele f legături comune , rezultă : − cuplele de clasa i vor reduce (i – f ).ci grade de libertate . Valoarea gradului de mobilitate al unui mecanism se obţine făcând diferenţa
dintre numărul gradelor de libertate ale elementelor considerate libere şi suma gradelor de libertate reduse de cuplele cinematice :
M = (6 – f) . n − ∑+=
−5
1fiic).fi(
Deci pentru mecanismele plane,din familia a 3 –a , avem f = 3 şi rezultă : M=3n – 2.c5 – c4
Gradul de mobilitate ne dă numărul de elemente conducătoare ale mecanismului . Pentru calculul corect al gradului de mobilitate , trebuie să nu se ia în consideraţie elementele şi cuplele cinematice pasive , care nu sunt necesare din punct de vedere cinematic , dar sunt introduse în construcţia mecanismului din considerente constructive sau de altă natură .

28
Îndepărtarea din mecanism a elementelor pasive sau a cuplelor pasive , nu influenţează mişcarea mecanismului .
Aplicaţie 1. Să se determine gradul de mobilitate pentru mecanismul din figura 2.3.
Fig. 2.3
. Întroducerea elementului 4 se justifică totuşi , el având rolul de a consolida mecanismul şi de a înlătura nedeterminarea care se creează în poziţiile critice . Notă : Dacă M ≥ 1 sistemul este mobil , iar dacă M < 1, sistemul este rigid .
2. – Să se determine gradul de mobilitate al mecanismului elipsograf la care AB = BF = BC (Fig. 2.4) . n = 4 c5 = 6 ⇒ M = 3.4 – 2.6 = 0 c4 = 0 Mecanismul este rigid , deci nu functionează.
Fig . 2.4
2.2. Mecanisme cu pârghii
AE = DF AB = CD BC =AD = EF n = 4 M=3n–2.c5–c4 =12–12=0 c5 = 6 c4 = 0 Rezultă că sistemul este rigid , ceea ce nu corespunde cu realitatea . Eroarea de calcul a apărut din considerarea elementului pasiv EF împreună cu cuplele E şi F . Corect este să considerăm: n = 3 si c5 = 4 ⇒ M = 9 – 8 = 1 Deci mecanismul are un element conducător
Totuşi , mecanismul functionează cu particularitatea constructivă impusă, punctul B având o traictorie circulară chiar dacă există sau nu cupla cinematică . Rezultă deci că elementul l este un element pasiv , având rolul de a consolida mecanismul , din punct de vedere constructiv . Dacă se elimină condiţiile de legătură pasive rezultă : N = 3 , c5 = 4 , M = 3.3 – 2.4 = 1 Dacă se adoptă elementul l drept element conducător şi se consideră elementul 4 ca element pasiv , atunci punctul E descrie o dreaptă , chiar dacă se elimină patina .

29
Mecanismele cu pârghii sunt formate din bare considerate rigide , legate între ele prin cuple cinematice inferioare sau superioare .
Mecanismele cu pârghii sunt utilizate în construcţia de aparate ca amplificatoare mecanice , mecanisme de ghidare şi înregistrare, mecanisme de comanda şi putere , mecanisme pentru relizarea unor funcţii matematice . Cele mai uzuale mecanisme simple cu părghii , utilizate în mecanică fină sunt : mecanismul patrulater , bielă manivelă , cu culisă oscilantă , mecanisme de sinus , de tangentă . Studiul mecanismelor cu pârghii , legat de probleme de analiză , sinteză şi precizie , se realizează prin metode : analitice , grafoanalitice , grafice .
2.2.1. Analiza cinematică a mecanismelor cu pârghii Analiza cinematică a unui mecanism urmăreşte determinarea :
• poziţiei elementelor conduse ale mecanismului , şi a traictoriilor diverselor puncte de pe elementele conduse ;
• vitezele şi acceleraţiile unghiulare şi liniare ale elementelor conduse , atunci când sunt date legile de mişcare ale elementelor conducătoare .
Există numeroase metode de analiză cinematică , fundamentate pe diverse domenii ale matematicii : geometrie analitică , calcul vectorial , calcul matriceal , algebra numerelor complexe , etc.
În continuare , vom prezenta metoda ecuaţiilor vectoriale , care serveşte la determinarea vitezelor şi acceleraţiilor , în special , în cazul mecanismelor plane.
Metoda presupune folosirea unor ecuaţii vectoriale care exprimă relaţia dintre două viteze sau acceleraţii ce aparţin unor puncte ale mecanismului .
Aceste ecuaţii , grupate în sisteme , se pot rezolva grafic sau analitic . Ecuaţiile utilizate sunt de două tipuri , funcţie de relaţiă dintre cele 2 puncte : Ecuaţiile de tipul I exprimă legătura dintre vitezele sau acceleraţiile unor puncte
care aparţin aceluiaş element (fig.2.5) :
Fig. 2.5
Ecuaţia de viteze : BAAB vvv += , in care :
ABv 1BA ×ω=
ABv
l.v
BA
AB1BA
⊥ω=
Se roteşte AB cu 90o în sensul ω Ecuaţia de acceleraţii:
tBA
nBAAB aaaa ++=

30
în care : ABa 21
nBA ω−=
ABAB//a
l.anBA
AB21
nBA
→
ω=
şi: ABa 1tBA ×ε=
ABa
l.atBA
AB1tBA
⊥
ε=
Ecuaţiile de tipul II exprimă legătura dintre vitezele sau acceleraţiile unor puncte care coincid ca poziţie , dar aparţin unor elemente diferite , legate prin cuplă de translaţie (fig.2.6) :
a) Ecuaţia de viteze:
Fig. 2.6
Vectorul rBAa reprezintă acceleraţia relativă în mişcare de translaţie a elementului
2 în raport cu 1 şi deci rBAa // xx
Datorită cuplei de translaţie avem: ε1 = ε2 2.2.2. Metoda grafo – analitică. În cazul acestei metode , poziţia elementelor conduse , atunci cănd se cunoaşte
poziţia elementului conducător, se poate afla prin construcţii grafice. În scopul determinării vitezelor şi acceleraţiilor , se scriu ecuaţiile vectoriale
corespunzătoare , care se rezolvă prin construcţii grafice la scară , denumite poligoane de viteze , respectiv poligoane de acceleraţii .
Aplicaţie . a). Utilizând metoda grafoanalitică , să se determine parametrii cinematici (viteze
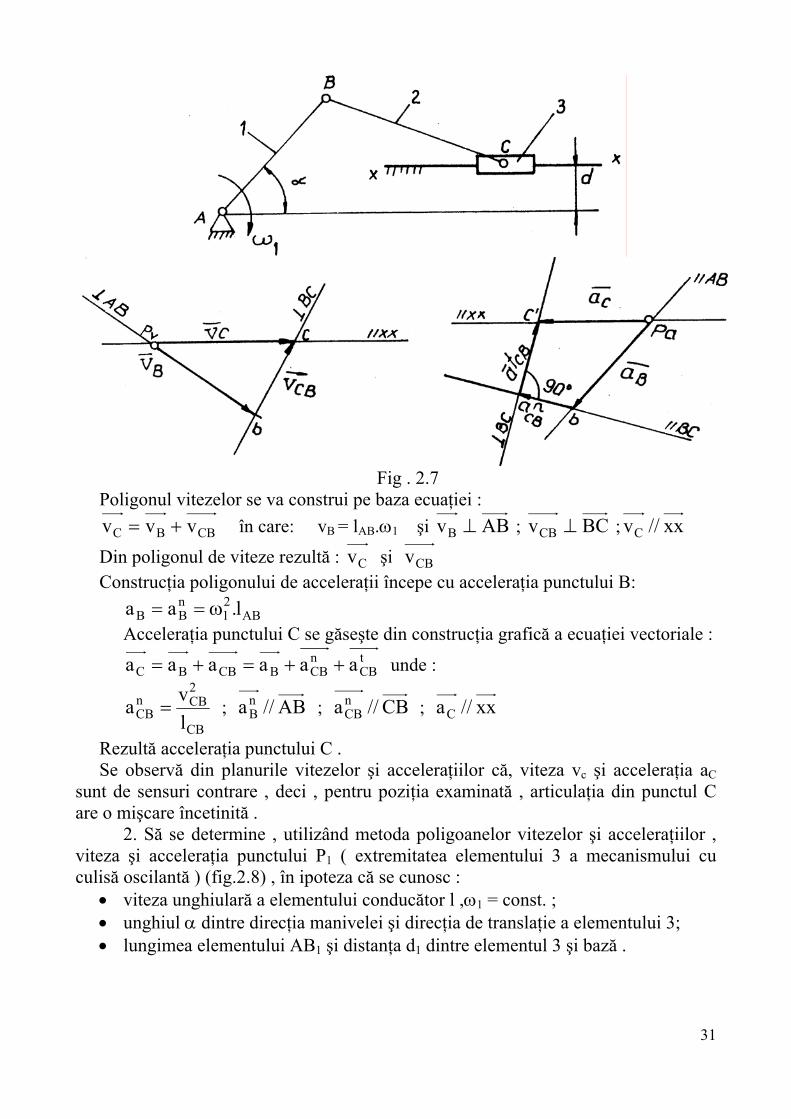
şi acceleraţii) pentru mecanismul bielă manivelă (fig.2.7) . Se cunoaşte : lAB ; lBC ;distanţa d ; ω1 = const. ; ε=0 . Se cere , să se determine viteza şi acceleratia cuplei cinematice C , pentru o
anumită poziţie a mecanismului (de exemplu ,pentru α=45o ).
BABB vvv += ; vectorul BAv reprezintă viteza relativă în mişcare de translaţie a elementului 2 în raport cu elementul 1 , deci
Bv // XX . Existenţa cuplei de translaţie impune : ω1 = ω2 Ecuaţia de acceleraţie este :
rBA
cBAAB aaaa ++= în care:
cBAa = BA1 v×ω ; unde: c
BAa = 2 .ω1.vBA ; cBAa xx⊥
o i l
31
Fig . 2.7
Poligonul vitezelor se va construi pe baza ecuaţiei :
CBBC vvv += în care: vB = lAB.ω1 şi ABvB ⊥ ; BCvCB ⊥ ; xx//vC
Din poligonul de viteze rezultă : Cv şi CBv Construcţia poligonului de acceleraţii începe cu acceleraţia punctului B:
AB21
nBB l.aa ω==
Acceleraţia punctului C se găseşte din construcţia grafică a ecuaţiei vectoriale : tCB
nCBBCBBC aaaaaa ++=+= unde :
CB
2CBn
CB lva = ; AB//an
B ; CB//anCB ; xx//aC
Rezultă acceleraţia punctului C . Se observă din planurile vitezelor şi acceleraţiilor că, viteza vc şi acceleraţia aC
sunt de sensuri contrare , deci , pentru poziţia examinată , articulaţia din punctul C are o mişcare încetinită .
2. Să se determine , utilizând metoda poligoanelor vitezelor şi acceleraţiilor , viteza şi acceleraţia punctului P1 ( extremitatea elementului 3 a mecanismului cu culisă oscilantă ) (fig.2.8) , în ipoteza că se cunosc :
• viteza unghiulară a elementului conducător l ,ω1 = const. ; • unghiul α dintre direcţia manivelei şi direcţia de translaţie a elementului 3; • lungimea elementului AB1 şi distanţa d1 dintre elementul 3 şi bază .

32
Fig .2.8
Fig.2.9
2.2.3. Metoda analitică pentru analiza cinematică a mecanismelor ( metoda
contururilor independente ) Să considerăm mecanismul patrulater la care se cunosc dimensiunile : l1 , l2 ,l3 , l4 ,
ale elementelor şi parametrii cinematici ai elementului conducător ( ϕ1 , ω1 , ε1 ) (fig.2.10).
Fig. 2.10
Alegându-se ca sistem de referinţă solidar cu batiul , triedrul xoyz cu axa Oz perpendiculară pe planul mişcării mecanismului , se notează unghiurile de poziţie cu ϕi şi acestea se măsoară toate în acelaş sens faţă de axa Ox (în sens antiorar , considerat sens pozitiv ) .
1B3B1c
1B3B
1B3B1c
1B3B
n1B3B
c1B3B1B3B
1B
211AB1B
1B3B
3B
1B3B1B3B
11B
11AB1B
v2a
v2a
aaaa
A1AB
1AB//a
.la
1AB//v
1P3B//v
vvv
ABv
.lv
×ω=
×ω=
++=
→
ω=
+=
⊥
ω=

33
Se alege un sens de parcugere a conturului poligonal format cu elementele mecanismului şi se scrie ecuaţia vectorială :
0llll 4321 =+++ Proiectând ecuaţia de contur , pe axele triedului fix , se obţine sistemul de ecuaţii
scalare : l1 cos ϕ1+ l2 cos ϕ2+ l3 cos ϕ3+ l4 cos ϕ4 = 0
l1 sin ϕ1+ l2 sin ϕ2+ l3 sin ϕ3 = 0 Sistemul de ecuaţii trigonometrice , poate fi transformat într-un sistem algebric
neliniar utilizând substituţia :
ui = tg 2
iϕ ; cos 2i
2i
i u1u1
+−
=ϕ şi sin 2i
ii u1
u2+
=ϕ
Prin rezolvarea acestui sistem se obţine ϕ2 şi ϕ3 Vitezele se obţin , derivând în raport cu timpul ecuaţiile care determină
poziţiile elementelor şi anume : ω1l1 sin ϕ1+ω2 l2 sin ϕ2+ω3 l3 sin ϕ3 = 0
ω1l1 cos ϕ1+ω2 l2 cos ϕ2+ω3 l3 cos ϕ3 = 0 în care am notat :
11
dtd
ω=ϕ
; 22
dtd
ω=ϕ
; 33
dtd
ω=ϕ
Rezolvând sistemul în raport cu ω2 şi ω3 se obţine :
)322
3112 sin(.l
)sin(4.ϕ−ϕϕ−ϕ
ω−=ω ; )323
2113 sin(.l
)sin(4.ϕ−ϕϕ−ϕ
ω=ω
În mod similar , derivând în raport cu timpul ecuaţiile vitezelor , obţinem acceleraţiile ε2 şi ε3 : l1.ε1.sin ϕ1+ l1.ω 2
1 .cos ϕ1+ l2.ε2.sin ϕ2+ l2.ω 22 .cos ϕ2 + l3.ε3.sin ϕ3+ l3.ω 2
3 .cos ϕ3= 0
l1.ε1.cos ϕ1 - l1.ω 21 .sin ϕ1+ l2.ε2.cos ϕ2- l2.ω 2
2 .sin ϕ2 + l3.ε3.cos ϕ3 - l3.ω 23 .sin ϕ3= 0
În care : dt
d 11
ω=ε ;
dtd 2
2ω
=ε ; dt
d 33
ω=ε 2ε⇒ şi 3ε .
2.2.4. Sinteza mecanismelor cu pârghii Sinteza mecanismelor se ocupă de asigurarea unor anumite condiţii geometrice
şi cinematice pentru elementele conduse ale mecanismului , atunci când este dată legea de mişcare a elementului conducător .Legile de mişcare , impuse prin temele de proiectare , pot fi teoretic realizate de mecanisme cu cuple inferioare căt şi cuple superioare . În construcţia de aparate se preferă mecanismele cu cuple superioare , întrucât , au un număr mai mic de elemente , asigură o precizie funcţională mai mare şi un flux de putere mai redus . Cele mai utilizate metode analitice de sinteză sunt :
• metode bazate pe apropierea funcţiilor ;
34
• metoda sistemelor de ecuaţii neliniare ; • metoda funcţiilor trigonometrice ; • metoda numerelor complexe etc . În continuare vom trata numai metodele bazate pe apropierea funcţiilor .
Fig. 2.11
Fig. 2.12
F(x,li) = p1(li,).β1(x) + p2(li,).β2(x) + ...+ pn(li,).βn(x)
unde βn(x) sunt funcţii continui de x , care nu cuprind parametrii li ai mecanismului , iar pi (l1 , l2 ,...,ln ) sunt coeficienţi care depind de parametrii li ai mecanismului . Numărul termenilor din polinomul generalizat este egal cu numărul parametrilor li necunoscuţi .
Să notăm : p1(li) = A1 ; p2(li) = A2 ;...; pn(li) = An Deci : F(x,li) = A1 β1(x) + A2 β2(x) + ... + An βn(x) şi Φ(x,li) = f(x) – [ ])x(A...)x(A)x(A nn2211 β++β+β Pentru determinarea coeficienţilor A1, A2,..., An, se propun n condiţii funcţiei
Φ(x,li). În cazul metodei interporlării , se egalează cu zero funcţia în n puncte xi din
intervalul considerat . Aceasta înseamnă că , graficele celor două funcţii F(x,li) şi f(x) se vor intersecta în cele n puncte , xi, numite noduri de interpolare .
Dacă se notează cu x1 , x2 ,... , xn abscisele corespunzătoare nodurilor de interpolare se obţine un sistem de ecuaţii liniar de forma :
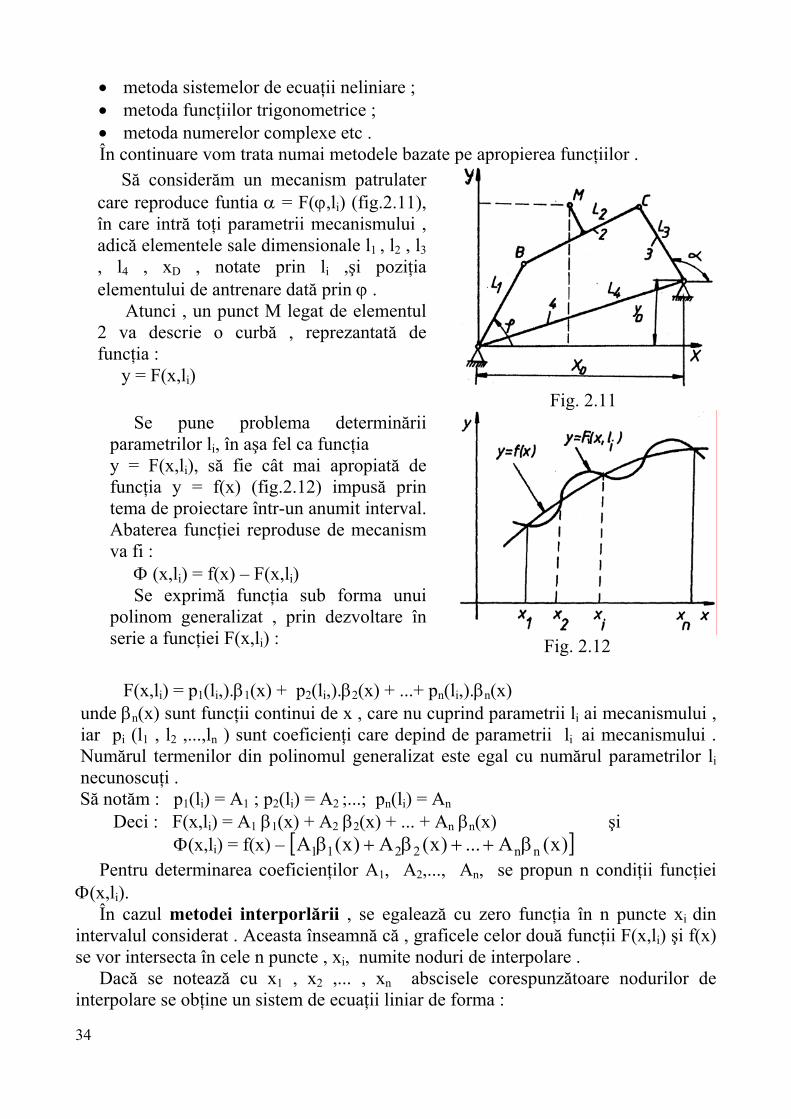
Să considerăm un mecanism patrulater care reproduce funtia α = F(ϕ,li) (fig.2.11), în care intră toţi parametrii mecanismului , adică elementele sale dimensionale l1 , l2 , l3 , l4 , xD , notate prin li ,şi poziţia elementului de antrenare dată prin ϕ .
Atunci , un punct M legat de elementul 2 va descrie o curbă , reprezantată de funcţia :
y = F(x,li)
Se pune problema determinării parametrilor li, în aşa fel ca funcţia y = F(x,li), să fie cât mai apropiată de funcţia y = f(x) (fig.2.12) impusă prin tema de proiectare într-un anumit interval. Abaterea funcţiei reproduse de mecanism va fi :
Φ (x,li) = f(x) – F(x,li) Se exprimă funcţia sub forma unui
polinom generalizat , prin dezvoltare în serie a funcţiei F(x,li) :
35
A1 β1(x) + A2 β2(x) + ... + An βn(x) = f(x1) ....................................................... A1 β1(x) + A2 β2(x) + ... + An βn(x) = f(xn) Rezolvând sistemul , obţinem parametrii A1, A2,..., An, iar din sistemul : p1(li) = A1 ; p2(li) = A2 ;...; pn(li) = An obţinem cele n dimensiuni necunoscute ale mecanismului . Această metodă are dezavantajul că abaterea Φ(x,li) dintre cele două funcţii f(x)
şi F(x,li) este necunoscută , în intervalele dintre punctele , xi ,considerate . Metoda se recomandă la soluţionarea unor probleme de sinteză de poziţie , atunci
când în funcţionarea mecanismului nu interesează traictoria propriu-zisă a punctului M, ci poziţia acestuia pe traictoria sa în anumite momente funcţionale corespunzătoare poziţiilor xi .
Metoda interpolării se recomandă , deci , la soluţionarea problemelor din tehnica transmiterii impulsurilor , când un punct de pe mecanismul de comandă trebuie să ocupe la un moment dat o anumită poziţie pentru facilitarea transmiterii unui semnal .
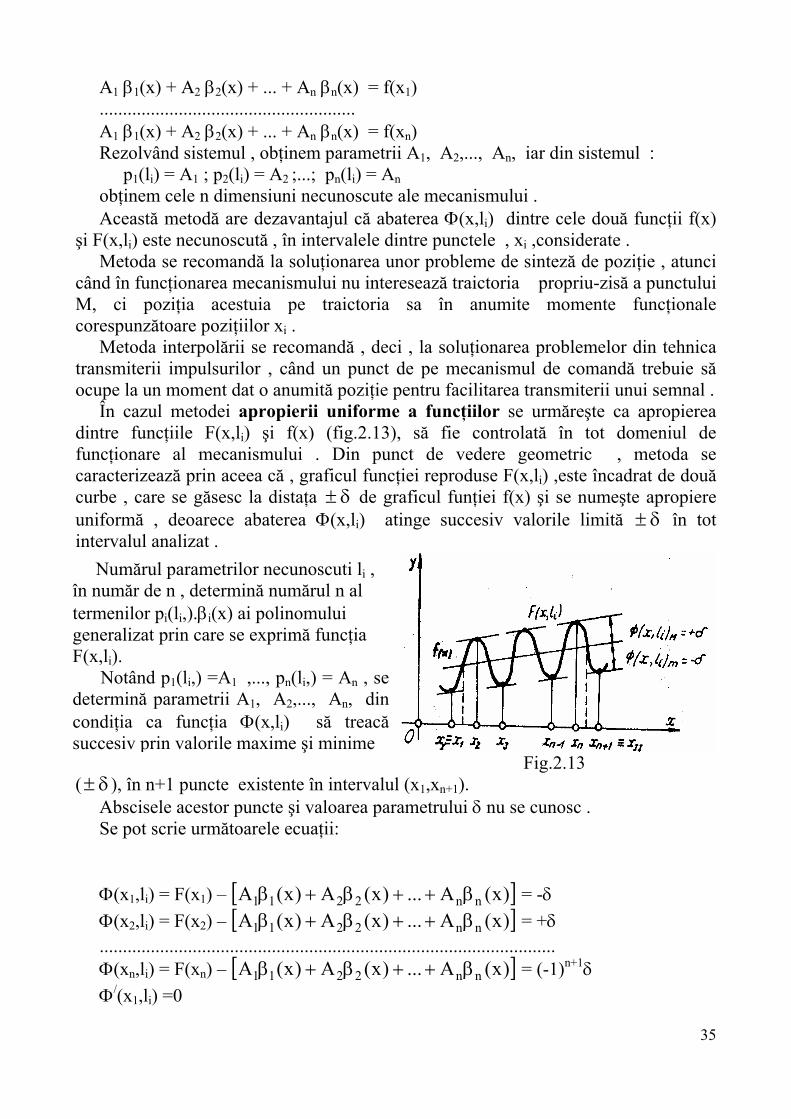
În cazul metodei apropierii uniforme a funcţiilor se urmăreşte ca apropierea dintre funcţiile F(x,li) şi f(x) (fig.2.13), să fie controlată în tot domeniul de funcţionare al mecanismului . Din punct de vedere geometric , metoda se caracterizează prin aceea că , graficul funcţiei reproduse F(x,li) ,este încadrat de două curbe , care se găsesc la distaţa δ± de graficul funţiei f(x) şi se numeşte apropiere uniformă , deoarece abaterea Φ(x,li) atinge succesiv valorile limită δ± în tot intervalul analizat .
Fig.2.13
( δ± ), în n+1 puncte existente în intervalul (x1,xn+1). Abscisele acestor puncte şi valoarea parametrului δ nu se cunosc . Se pot scrie următoarele ecuaţii: Φ(x1,li) = F(x1) – [ ])x(A...)x(A)x(A nn2211 β++β+β = -δ Φ(x2,li) = F(x2) – [ ])x(A...)x(A)x(A nn2211 β++β+β = +δ .................................................................................................. Φ(xn,li) = F(xn) – [ ])x(A...)x(A)x(A nn2211 β++β+β = (-1)n+1δ Φ/(x1,li) =0
Numărul parametrilor necunoscuti li , în număr de n , determină numărul n al termenilor pi(li,).βi(x) ai polinomului generalizat prin care se exprimă funcţia F(x,li).
Notând p1(li,) =A1 ,..., pn(li,) = An , se determină parametrii A1, A2,..., An, din condiţia ca funcţia Φ(x,li) să treacă succesiv prin valorile maxime şi minime
36
Φ/(x2,li) =0 ................. Φ/(xn,li) =0 Am obtinut 2n + 2 ecuaţii , egal cu numărul de necunoscute : abscisele x1 , x2 ,...
, xn , coeficienţii A1, A2,..., An şi abaterea δ . Metoda apropierii uniforme a funcţiilor este recomandabilă pentru sinteza mecanismelor de urmărire , de reglaj , de copiere sau pentru realizarea unor anumite funcţii ale semnalului de iesire .
2.2.5. Determinarea forţelor la mecanismele cu părghii Determinarea forţelor care acţionează în mecanisme este necesară pentru : calculul de rezistenţă al elementelor care compun mecanismul , calculul de uzură al cuplelor cinematice , pentru stabilirea dimensiunilor şi formei elementelor . Forţele care acţionează în mecanisme sunt :
a) reacţiunile în cuplele cinematice ; b) forţele de inerţie ; c) forţele de frecare . Pentru determinarea acestora trebuiesc cunoscute forţele exterioare şi legea de
mişcare a mecanismului . a.– Calculul reacţiunilor în cuplele cinematice Determinarea forţelor care acţionează în mecanisme trebuie începută cu
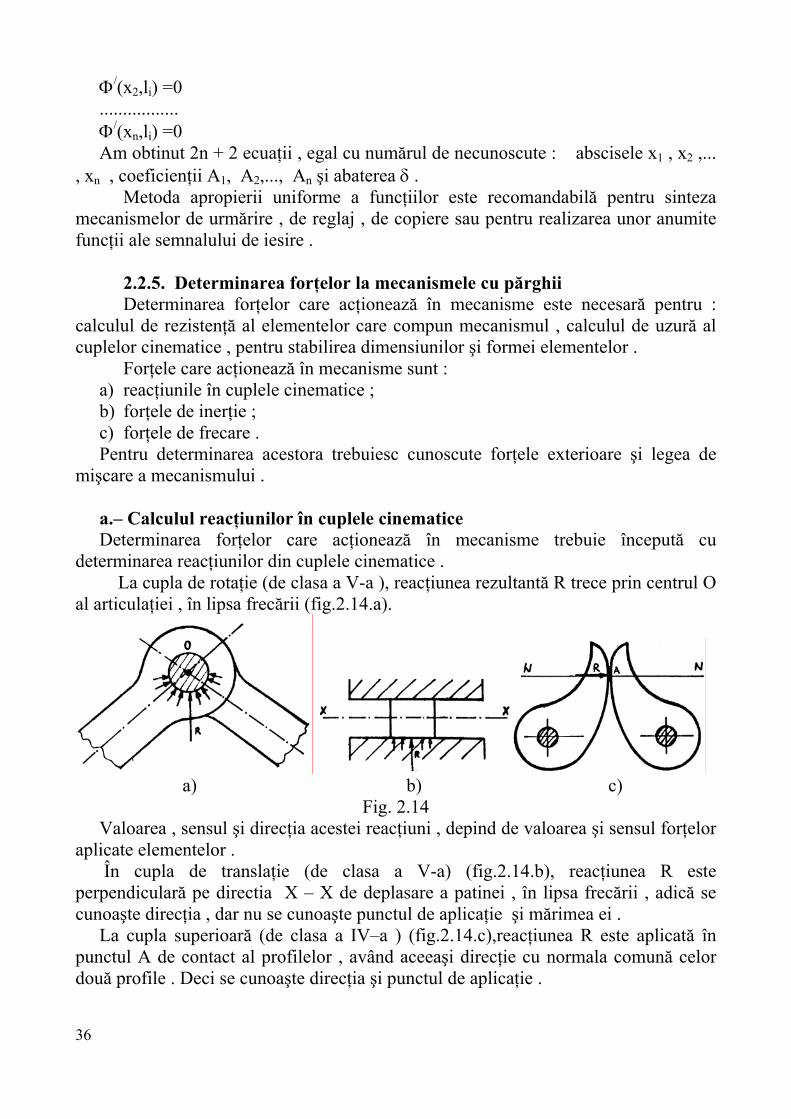
determinarea reacţiunilor din cuplele cinematice . La cupla de rotaţie (de clasa a V-a ), reacţiunea rezultantă R trece prin centrul O
al articulaţiei , în lipsa frecării (fig.2.14.a).
a) b) c)
Fig. 2.14 Valoarea , sensul şi direcţia acestei reacţiuni , depind de valoarea şi sensul forţelor
aplicate elementelor . În cupla de translaţie (de clasa a V-a) (fig.2.14.b), reacţiunea R este
perpendiculară pe directia X – X de deplasare a patinei , în lipsa frecării , adică se cunoaşte direcţia , dar nu se cunoaşte punctul de aplicaţie şi mărimea ei .
La cupla superioară (de clasa a IV–a ) (fig.2.14.c),reacţiunea R este aplicată în punctul A de contact al profilelor , având aceeaşi direcţie cu normala comună celor două profile . Deci se cunoaşte direcţia şi punctul de aplicaţie .

37
Să considerăm o grupă structurală din componenţa unui mecanism cu pârghii ,
asupra căreia actionează forţele exterioare 32 P,P şi momentele 32 M,M .
Să notăm cu 4312 PsiP reacţiunile necunoscute din cuplele B şi D care se determină din ecuaţia de echilibru a grupei :
0PPPP 433212 =+++
Fig. 2.15
Reacţiunile 4312 PsiP se descompun în două componente : una de-a lungul elementului , notată prin indicele n , şi alta perpendiculară pe el , notată cu indicele t.
0PPP t12
n1212 =++ si 0PPP t
43n4343 =++
Ecuaţia de echilibru a momentelor tuturor forţelor care acţionează asupra elementului 2 în raport cu punctul C , este :
0M)P(M)P(M 2t
12C2C =++ întrucăt : 0)P(M n12C = şi 0)P(M n
32C =
Dar : BCt
12t
12C l.P)P(M = ⇒ BC
22Ct12 l
M)P(MP +−=
În mod similar , pentru elementul 3 , se vor lua momentele în raport cu punctul C ,obţinându-se :
0M)P(M)P(M 3t43C3C =++ întrucât : 0)P(M n
43C = si 0)P(M n23C =
DCt43
t43C l.P)P(M = ⇒
DC
33Ct43 l
M)P(MP +−=
Ecuatia forţelor , scrisă anterior , capătă următoarea formă :
0PPPPPP t43
n4332
t12
n12 =+++++
în care necunoscute sunt mărimile lui 4312 PsiP , care se pot determina construind poligonul forţelor , ce trebuie să se închidă , fiind vorba de o grupă cinematică static determinată . Dintr-un punct arbitrar , a , se construiesc vectorii cunoscuţi
38
32t
12n
12 P,P,P,P , iar perpendiculari pe ei se duc direcţiile lui n43
n12 PsiP care se
intersectează în f . Unind f cu a şi c , se determină n43
n12 PsiP .Reacţiunile din cupla
C (P23) se determină din ecuaţia de echilibru a forţelor care lucrează asupra elementului 3 :
0PPP 23343 =++ (se uneşte f cu b în poligonul forţelor ) . b. – Calculul forţelor de inerţie Forţele de inerţie se adaugă forţelor cunoscute , provocănd solicitări variabile ale
elementelor . La mecanismele utilizate în automatizări , forţele de inerţie au valori de acelaş ordin de mărime cu forţele exterioare , sau pot fi chiar mai mari , şi de aceea , trebuie luate în considerare .
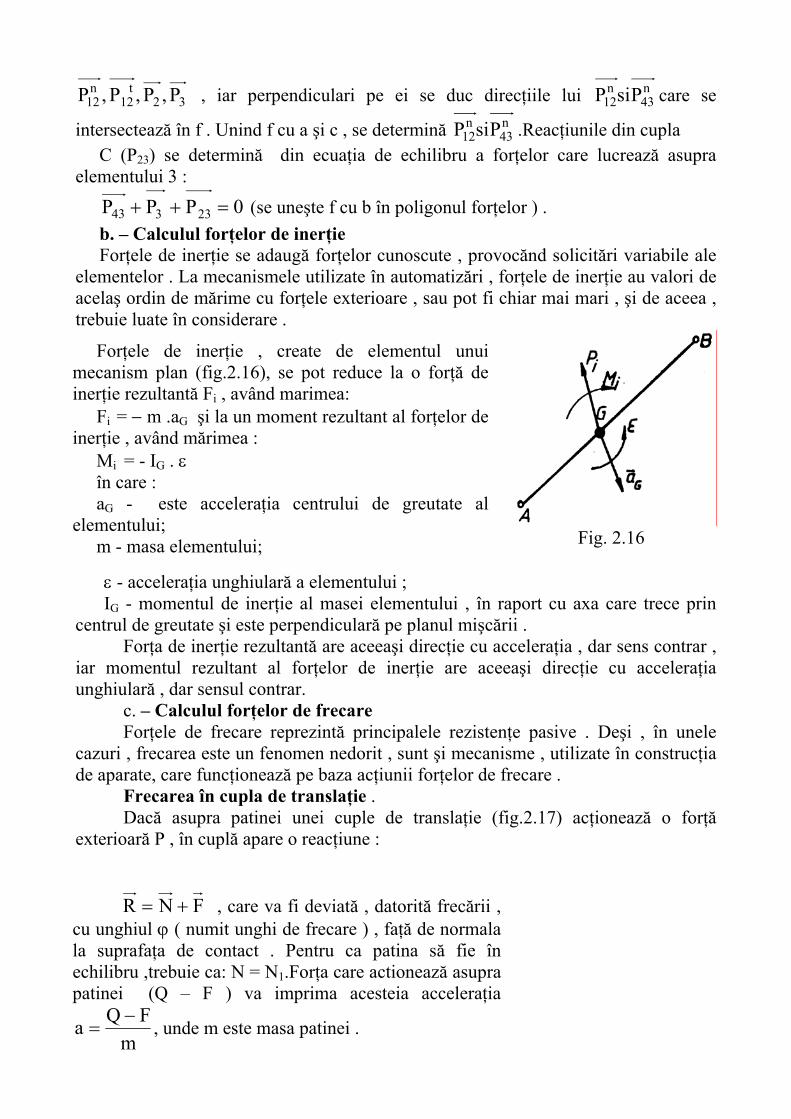
Fig. 2.16
ε - acceleraţia unghiulară a elementului ; IG - momentul de inerţie al masei elementului , în raport cu axa care trece prin
centrul de greutate şi este perpendiculară pe planul mişcării . Forţa de inerţie rezultantă are aceeaşi direcţie cu acceleraţia , dar sens contrar ,
iar momentul rezultant al forţelor de inerţie are aceeaşi direcţie cu acceleraţia unghiulară , dar sensul contrar.
c. – Calculul forţelor de frecare Forţele de frecare reprezintă principalele rezistenţe pasive . Deşi , în unele
cazuri , frecarea este un fenomen nedorit , sunt şi mecanisme , utilizate în construcţia de aparate, care funcţionează pe baza acţiunii forţelor de frecare .
Frecarea în cupla de translaţie . Dacă asupra patinei unei cuple de translaţie (fig.2.17) acţionează o forţă
exterioară P , în cuplă apare o reacţiune :
Forţele de inerţie , create de elementul unui mecanism plan (fig.2.16), se pot reduce la o forţă de inerţie rezultantă Fi , având marimea:
Fi = − m .aG şi la un moment rezultant al forţelor de inerţie , având mărimea :
Mi = - IG . ε în care : aG - este acceleraţia centrului de greutate al
elementului; m - masa elementului;
FNR += , care va fi deviată , datorită frecării , cu unghiul ϕ ( numit unghi de frecare ) , faţă de normala la suprafaţa de contact . Pentru ca patina să fie în echilibru ,trebuie ca: N = N1.Forţa care actionează asupra patinei (Q – F ) va imprima acesteia acceleraţia
mFQa −
= , unde m este masa patinei .
39
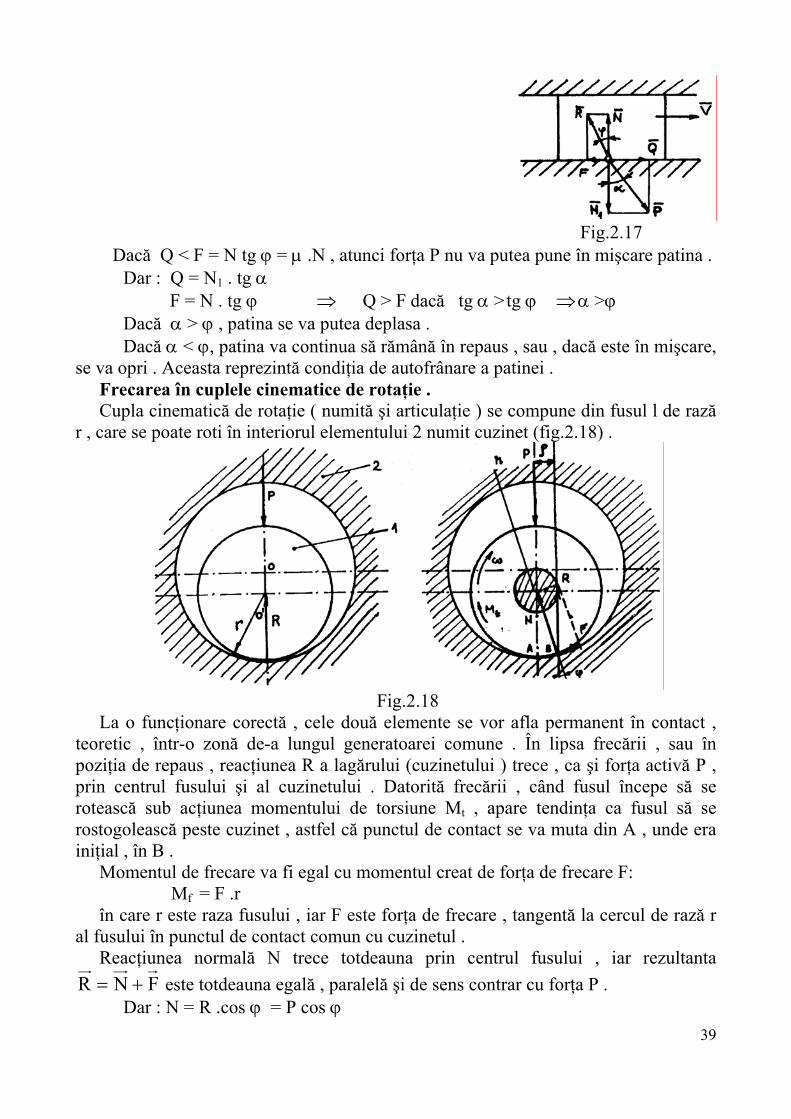
Fig.2.17
Dacă Q < F = N tg ϕ = µ .N , atunci forţa P nu va putea pune în mişcare patina . Dar : Q = N1 . tg α F = N . tg ϕ ⇒ Q > F dacă tg α > tg ϕ ⇒α >ϕ Dacă α > ϕ , patina se va putea deplasa . Dacă α < ϕ, patina va continua să rămână în repaus , sau , dacă este în mişcare,
se va opri . Aceasta reprezintă condiţia de autofrânare a patinei . Frecarea în cuplele cinematice de rotaţie . Cupla cinematică de rotaţie ( numită şi articulaţie ) se compune din fusul l de rază
r , care se poate roti în interiorul elementului 2 numit cuzinet (fig.2.18) .
Fig.2.18
La o funcţionare corectă , cele două elemente se vor afla permanent în contact , teoretic , într-o zonă de-a lungul generatoarei comune . În lipsa frecării , sau în poziţia de repaus , reacţiunea R a lagărului (cuzinetului ) trece , ca şi forţa activă P , prin centrul fusului şi al cuzinetului . Datorită frecării , când fusul începe să se rotească sub acţiunea momentului de torsiune Mt , apare tendinţa ca fusul să se rostogolească peste cuzinet , astfel că punctul de contact se va muta din A , unde era iniţial , în B .
Momentul de frecare va fi egal cu momentul creat de forţa de frecare F: Mf = F .r în care r este raza fusului , iar F este forţa de frecare , tangentă la cercul de rază r
al fusului în punctul de contact comun cu cuzinetul . Reacţiunea normală N trece totdeauna prin centrul fusului , iar rezultanta
FNR += este totdeauna egală , paralelă şi de sens contrar cu forţa P . Dar : N = R .cos ϕ = P cos ϕ
40
F = µ . N = µ P cos ϕ , unde µ = tg ρ Rezultă : F = P sin ϕ şi Mf = P .r . sin ϕ Întrucât unghiul de frecare este mic , se poate considera cu suficientă
aproximaţie, sin ϕ = tg ϕ = µ ⇒ ρ = r . sin ϕ = µ . r în care ρ este raza cercului la care reacţiunea R va fi permanent tangentă şi se
numeşte cerc de frecare. Deci Mf = ρ . µ .R Când forţa F = µ . N dă un moment mai mare decât Mt , fusul nu se poate roti ( sau
se frânează , dacă se află în mişcare ) şi apare fenomenul de autofrânare , rezultanta R trecând prin interiorul cercului de frecare .
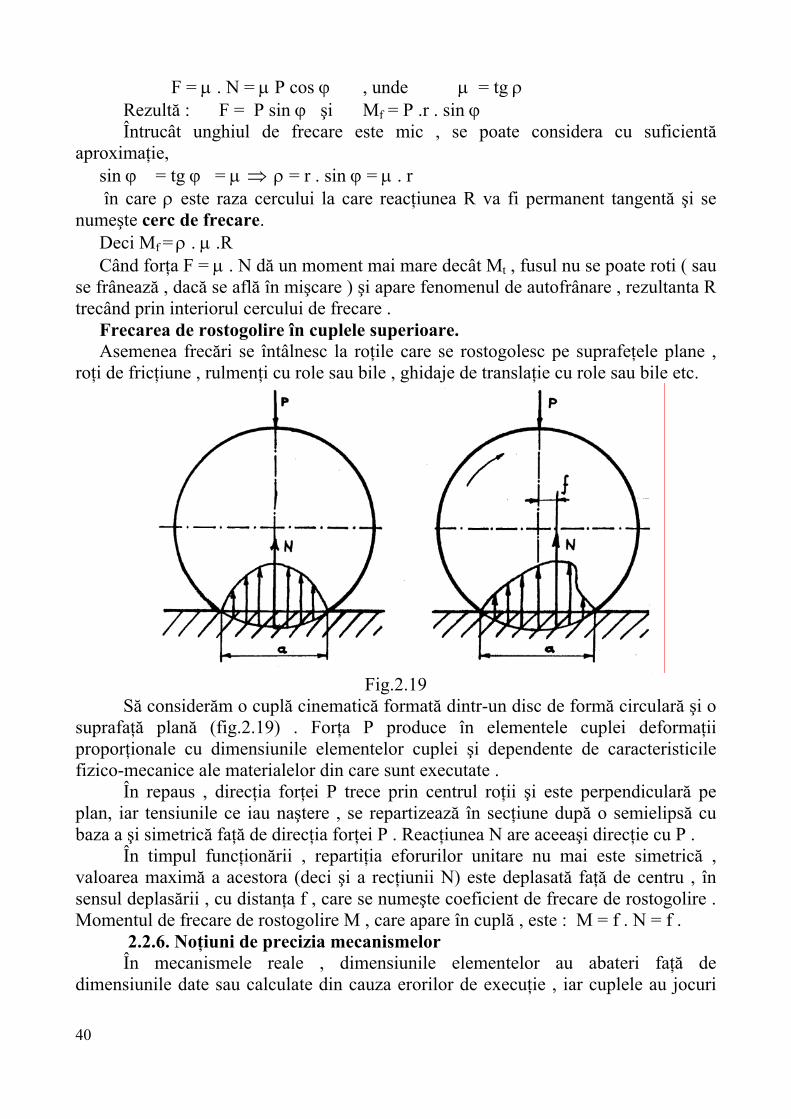
Frecarea de rostogolire în cuplele superioare. Asemenea frecări se întâlnesc la roţile care se rostogolesc pe suprafeţele plane ,
roţi de fricţiune , rulmenţi cu role sau bile , ghidaje de translaţie cu role sau bile etc.
Fig.2.19
Să considerăm o cuplă cinematică formată dintr-un disc de formă circulară şi o suprafaţă plană (fig.2.19) . Forţa P produce în elementele cuplei deformaţii proporţionale cu dimensiunile elementelor cuplei şi dependente de caracteristicile fizico-mecanice ale materialelor din care sunt executate . În repaus , direcţia forţei P trece prin centrul roţii şi este perpendiculară pe plan, iar tensiunile ce iau naştere , se repartizează în secţiune după o semielipsă cu baza a şi simetrică faţă de direcţia forţei P . Reacţiunea N are aceeaşi direcţie cu P .
În timpul funcţionării , repartiţia eforurilor unitare nu mai este simetrică , valoarea maximă a acestora (deci şi a recţiunii N) este deplasată faţă de centru , în sensul deplasării , cu distanţa f , care se numeşte coeficient de frecare de rostogolire . Momentul de frecare de rostogolire M , care apare în cuplă , este : M = f . N = f .
2.2.6. Noţiuni de precizia mecanismelor În mecanismele reale , dimensiunile elementelor au abateri faţă de dimensiunile date sau calculate din cauza erorilor de execuţie , iar cuplele au jocuri
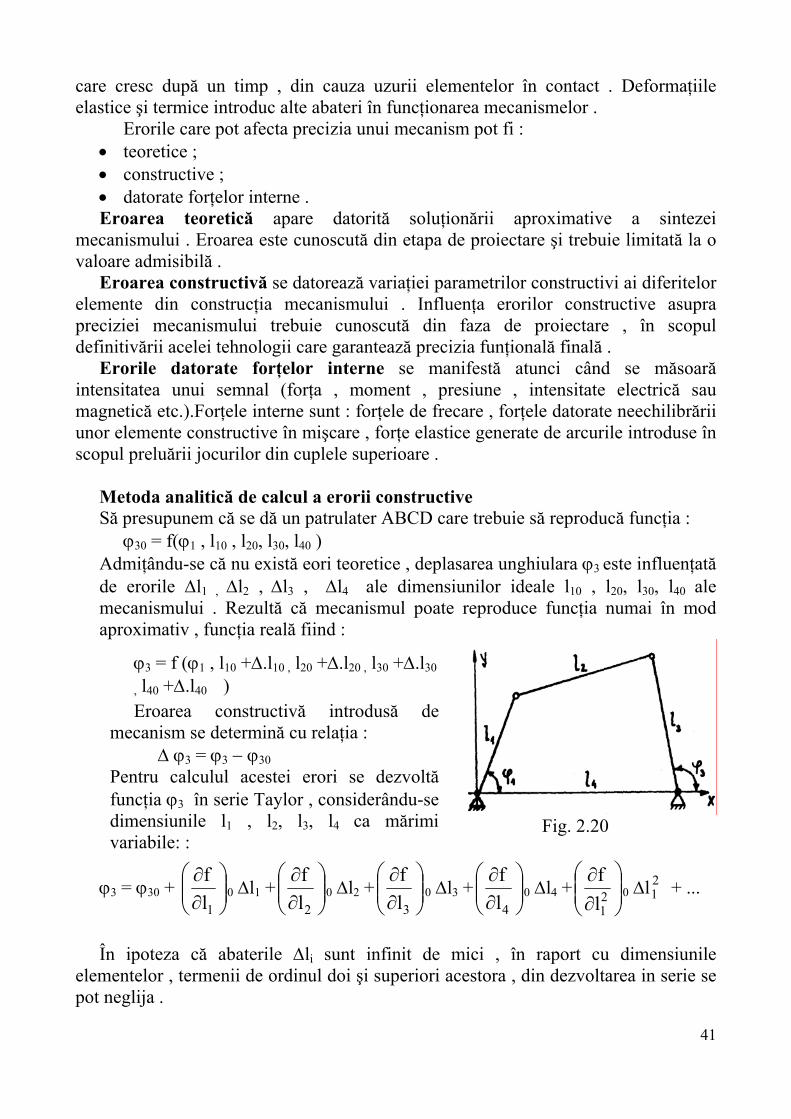
41
care cresc după un timp , din cauza uzurii elementelor în contact . Deformaţiile elastice şi termice introduc alte abateri în funcţionarea mecanismelor . Erorile care pot afecta precizia unui mecanism pot fi :
• teoretice ; • constructive ; • datorate forţelor interne . Eroarea teoretică apare datorită soluţionării aproximative a sintezei
mecanismului . Eroarea este cunoscută din etapa de proiectare şi trebuie limitată la o valoare admisibilă .
Eroarea constructivă se datorează variaţiei parametrilor constructivi ai diferitelor elemente din construcţia mecanismului . Influenţa erorilor constructive asupra preciziei mecanismului trebuie cunoscută din faza de proiectare , în scopul definitivării acelei tehnologii care garantează precizia funţională finală .
Erorile datorate forţelor interne se manifestă atunci când se măsoară intensitatea unui semnal (forţa , moment , presiune , intensitate electrică sau magnetică etc.).Forţele interne sunt : forţele de frecare , forţele datorate neechilibrării unor elemente constructive în mişcare , forţe elastice generate de arcurile introduse în scopul preluării jocurilor din cuplele superioare .
Metoda analitică de calcul a erorii constructive Să presupunem că se dă un patrulater ABCD care trebuie să reproducă funcţia :
ϕ30 = f(ϕ1 , l10 , l20, l30, l40 ) Admiţându-se că nu există eori teoretice , deplasarea unghiulara ϕ3 este influenţată de erorile ∆l1 , ∆l2 , ∆l3 , ∆l4 ale dimensiunilor ideale l10 , l20, l30, l40 ale mecanismului . Rezultă că mecanismul poate reproduce funcţia numai în mod aproximativ , funcţia reală fiind :
Fig. 2.20
ϕ3 = ϕ30 + ⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
1lf
0 ∆l1 + ⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
2lf
0 ∆l2 + ⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
3lf
0 ∆l3 + ⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
4lf
0 ∆l4 + ⎟⎟⎠
⎞⎜⎜⎝
⎛
∂∂
21lf
0 ∆l 21 + ...
În ipoteza că abaterile ∆li sunt infinit de mici , în raport cu dimensiunile
elementelor , termenii de ordinul doi şi superiori acestora , din dezvoltarea in serie se pot neglija .
ϕ3 = f (ϕ1 , l10 +∆.l10 , l20 +∆.l20 , l30 +∆.l30
, l40 +∆.l40 ) Eroarea constructivă introdusă de
mecanism se determină cu relaţia : ∆ ϕ3 = ϕ3 − ϕ30
Pentru calculul acestei erori se dezvoltă funcţia ϕ3 în serie Taylor , considerându-se dimensiunile l1 , l2, l3, l4 ca mărimi variabile: :
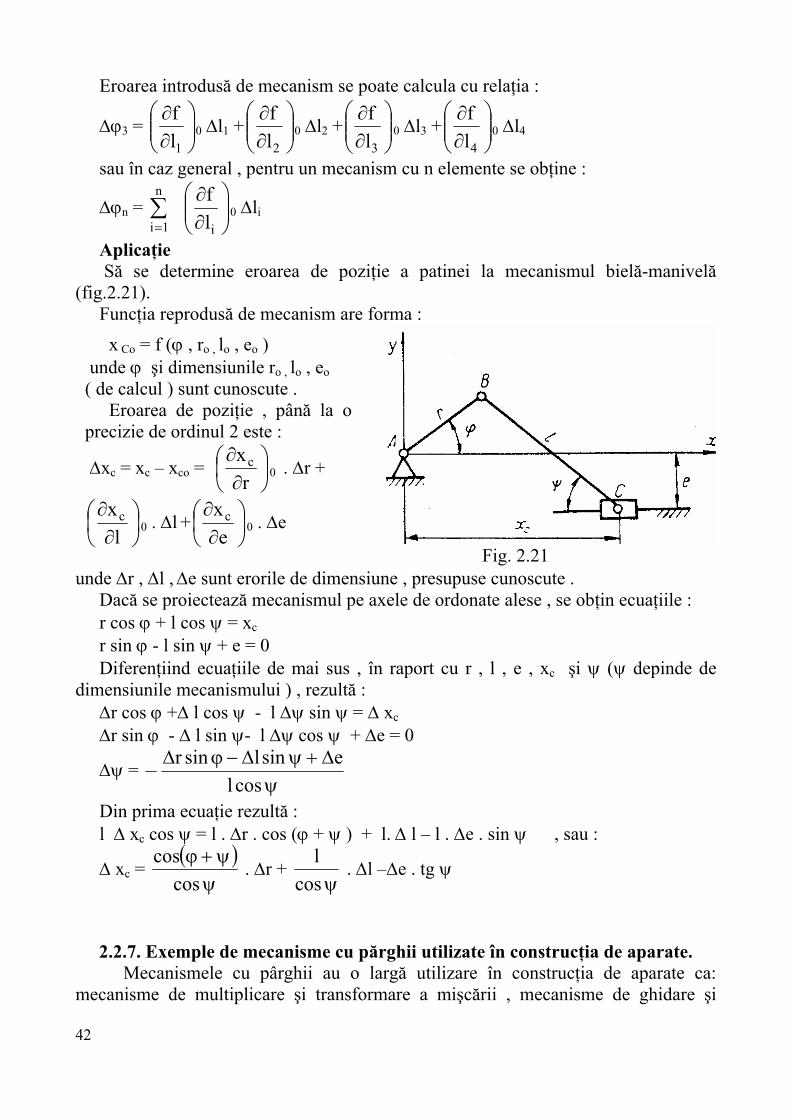
42
Eroarea introdusă de mecanism se poate calcula cu relaţia :
∆ϕ3 = ⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
1lf
0 ∆l1 + ⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
2lf
0 ∆l2 + ⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
3lf
0 ∆l3 + ⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
4lf
0 ∆l4
sau în caz general , pentru un mecanism cu n elemente se obţine :
∆ϕn = ∑=
n
1i⎟⎟⎠
⎞⎜⎜⎝
⎛∂∂
ilf
0 ∆li
Aplicaţie Să se determine eroarea de poziţie a patinei la mecanismul bielă-manivelă
(fig.2.21). Funcţia reprodusă de mecanism are forma :
Fig. 2.21
unde ∆r , ∆l , ∆e sunt erorile de dimensiune , presupuse cunoscute . Dacă se proiectează mecanismul pe axele de ordonate alese , se obţin ecuaţiile : r cos ϕ + l cos ψ = xc
r sin ϕ - l sin ψ + e = 0
Diferenţiind ecuaţiile de mai sus , în raport cu r , l , e , xc şi ψ (ψ depinde de dimensiunile mecanismului ) , rezultă :
∆r cos ϕ +∆ l cos ψ - l ∆ψ sin ψ = ∆ xc
∆r sin ϕ - ∆ l sin ψ- l ∆ψ cos ψ + ∆e = 0
∆ψ = ψ
∆+ψ∆−ϕ∆cosl
esinlsinr
Din prima ecuaţie rezultă : l ∆ xc cos ψ = l . ∆r . cos (ϕ + ψ ) + l. ∆ l – l . ∆e . sin ψ , sau :
∆ xc = ( )ψψ+ϕ
coscos
. ∆r + ψcos
l . ∆l –∆e . tg ψ
2.2.7. Exemple de mecanisme cu părghii utilizate în construcţia de aparate. Mecanismele cu pârghii au o largă utilizare în construcţia de aparate ca:
mecanisme de multiplicare şi transformare a mişcării , mecanisme de ghidare şi
x Co = f (ϕ , ro , lo , eo ) unde ϕ şi dimensiunile ro , lo , eo ( de calcul ) sunt cunoscute .
Eroarea de poziţie , până la o precizie de ordinul 2 este :
∆xc = xc – xco = ⎟⎠⎞
⎜⎝⎛∂∂
rxc
0 . ∆r +
⎟⎠⎞
⎜⎝⎛∂∂
lxc
0 . ∆l + ⎟⎠⎞
⎜⎝⎛∂∂
exc
0 . ∆e
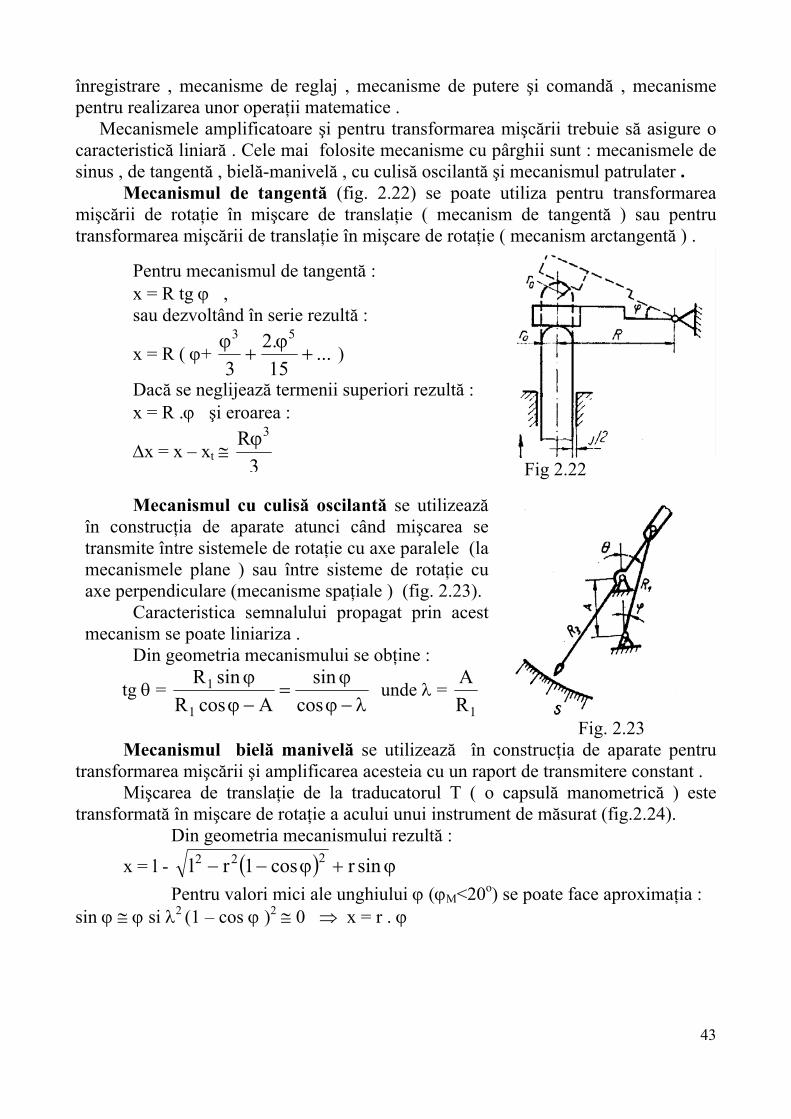
43
înregistrare , mecanisme de reglaj , mecanisme de putere şi comandă , mecanisme pentru realizarea unor operaţii matematice .
Mecanismele amplificatoare şi pentru transformarea mişcării trebuie să asigure o caracteristică liniară . Cele mai folosite mecanisme cu pârghii sunt : mecanismele de sinus , de tangentă , bielă-manivelă , cu culisă oscilantă şi mecanismul patrulater . Mecanismul de tangentă (fig. 2.22) se poate utiliza pentru transformarea mişcării de rotaţie în mişcare de translaţie ( mecanism de tangentă ) sau pentru transformarea mişcării de translaţie în mişcare de rotaţie ( mecanism arctangentă ) .
Fig 2.22
Fig. 2.23 Mecanismul bielă manivelă se utilizează în construcţia de aparate pentru transformarea mişcării şi amplificarea acesteia cu un raport de transmitere constant .
Mişcarea de translaţie de la traducatorul T ( o capsulă manometrică ) este transformată în mişcare de rotaţie a acului unui instrument de măsurat (fig.2.24).
Din geometria mecanismului rezultă :
x = l - ( ) ϕ+ϕ−− sinrcos1rl 222 Pentru valori mici ale unghiului ϕ (ϕM<20o) se poate face aproximaţia :
sin ϕ ≅ ϕ si λ2 (1 – cos ϕ )2 ≅ 0 ⇒ x = r . ϕ
Pentru mecanismul de tangentă : x = R tg ϕ ,
sau dezvoltând în serie rezultă :
x = R ( ϕ+ ...15.2
3
53+
ϕ+
ϕ )
Dacă se neglijează termenii superiori rezultă : x = R .ϕ şi eroarea :
∆x = x – xt ≅ 3
R 3ϕ
Mecanismul cu culisă oscilantă se utilizează în construcţia de aparate atunci când mişcarea se transmite între sistemele de rotaţie cu axe paralele (la mecanismele plane ) sau între sisteme de rotaţie cu axe perpendiculare (mecanisme spaţiale ) (fig. 2.23).
Caracteristica semnalului propagat prin acest mecanism se poate liniariza . Din geometria mecanismului se obţine :
tg θ = λ−ϕ
ϕ=
−ϕϕ
cossin
AcosRsinR
1
1 unde λ = 1R
A
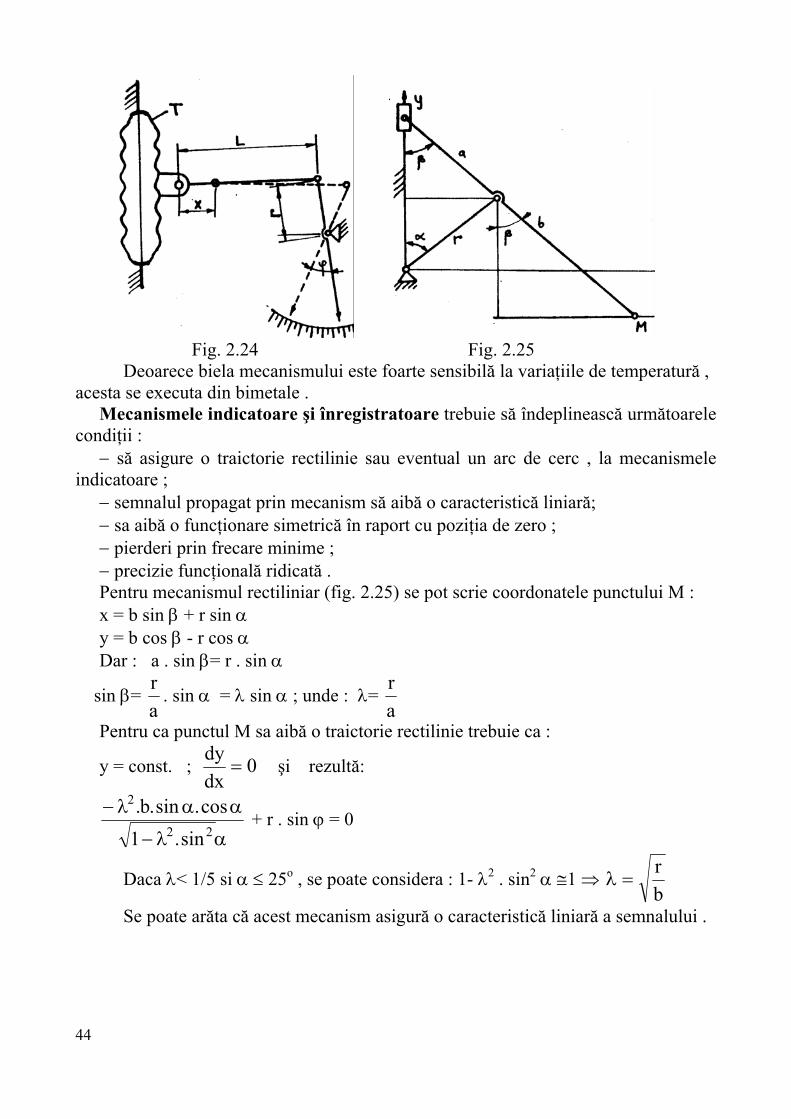
44
Fig. 2.24 Fig. 2.25
Deoarece biela mecanismului este foarte sensibilă la variaţiile de temperatură , acesta se executa din bimetale .
Mecanismele indicatoare şi înregistratoare trebuie să îndeplinească următoarele condiţii :
− să asigure o traictorie rectilinie sau eventual un arc de cerc , la mecanismele indicatoare ;
− semnalul propagat prin mecanism să aibă o caracteristică liniară; − sa aibă o funcţionare simetrică în raport cu poziţia de zero ; − pierderi prin frecare minime ; − precizie funcţională ridicată . Pentru mecanismul rectiliniar (fig. 2.25) se pot scrie coordonatele punctului M : x = b sin β + r sin α y = b cos β - r cos α Dar : a . sin β= r . sin α
sin β= ar
. sin α = λ sin α ; unde : λ= ar
Pentru ca punctul M sa aibă o traictorie rectilinie trebuie ca :
y = const. ; 0dxdy
= şi rezultă:
αλ−
ααλ−22
2
sin.1cos.sin.b.
+ r . sin ϕ = 0
Daca λ< 1/5 si α ≤ 25o , se poate considera : 1- λ2 . sin2 α ≅1 ⇒ br
=λ
Se poate arăta că acest mecanism asigură o caracteristică liniară a semnalului .
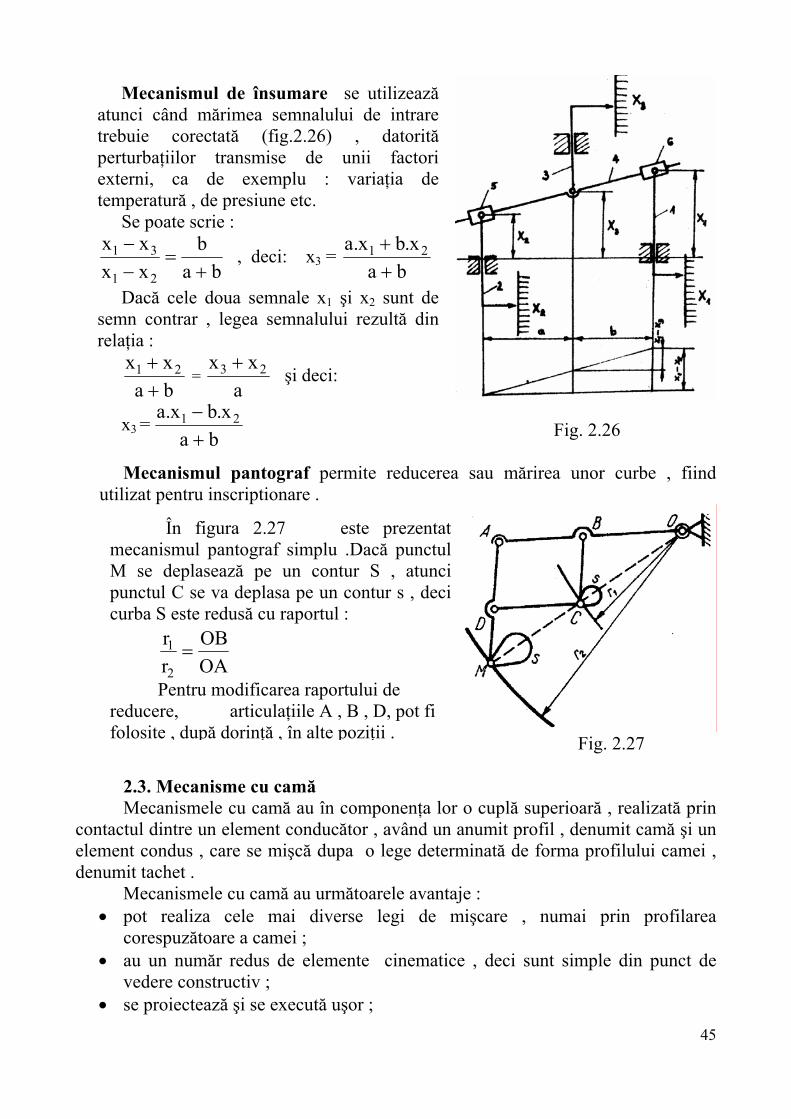
45
Fig. 2.26 Mecanismul pantograf permite reducerea sau mărirea unor curbe , fiind utilizat pentru inscriptionare .
Fig. 2.27
2.3. Mecanisme cu camă
Mecanismele cu camă au în componenţa lor o cuplă superioară , realizată prin contactul dintre un element conducător , având un anumit profil , denumit camă şi un element condus , care se mişcă dupa o lege determinată de forma profilului camei , denumit tachet . Mecanismele cu camă au următoarele avantaje :
• pot realiza cele mai diverse legi de mişcare , numai prin profilarea corespuzătoare a camei ;
• au un număr redus de elemente cinematice , deci sunt simple din punct de vedere constructiv ;
• se proiectează şi se execută uşor ;
Mecanismul de însumare se utilizează atunci când mărimea semnalului de intrare trebuie corectată (fig.2.26) , datorită perturbaţiilor transmise de unii factori externi, ca de exemplu : variaţia de temperatură , de presiune etc.
Se poate scrie :
bab
xxxx
21
31
+=
−−
, deci: x3 = ba
x.bx.a 21
++
Dacă cele doua semnale x1 şi x2 sunt de semn contrar , legea semnalului rezultă din relaţia :
baxx 21
++
= a
xx 23 + şi deci:
x3 = bax.bx.a 21
+−
În figura 2.27 este prezentat mecanismul pantograf simplu .Dacă punctul M se deplasează pe un contur S , atunci punctul C se va deplasa pe un contur s , deci curba S este redusă cu raportul :
OAOB
rr
2
1 =
Pentru modificarea raportului de reducere, articulaţiile A , B , D, pot fi folosite , după dorinţă , în alte poziţii .
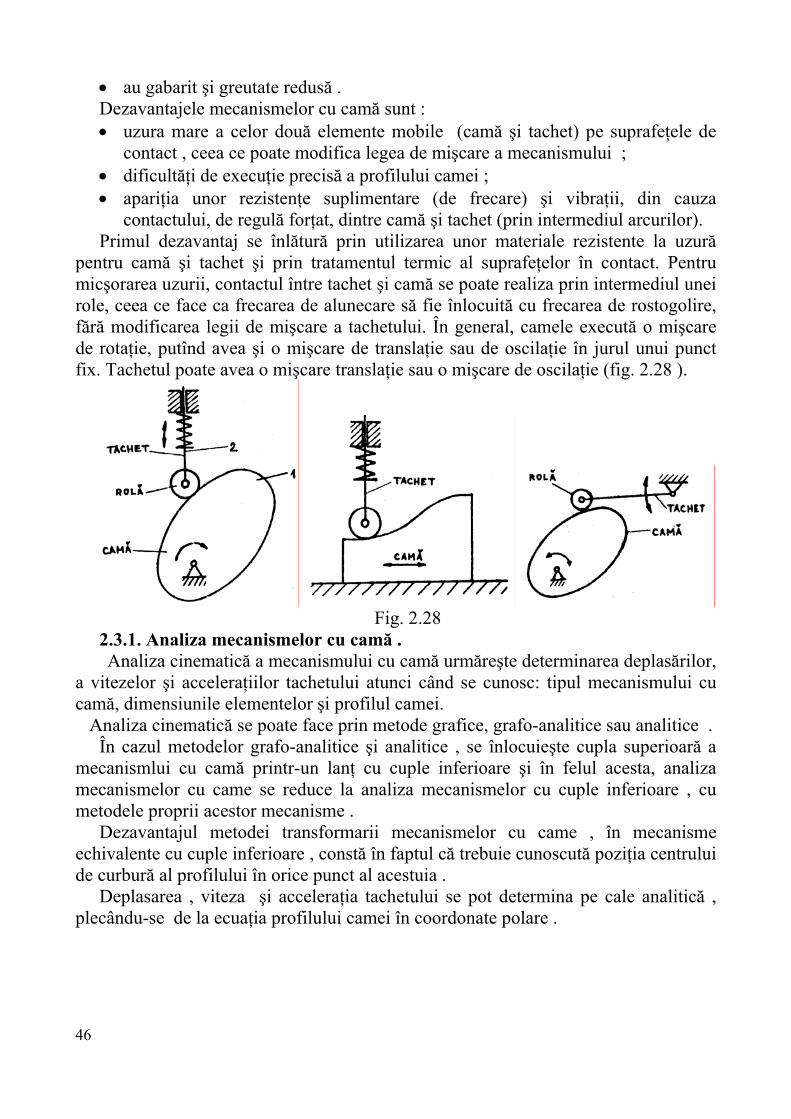
46
• au gabarit şi greutate redusă . Dezavantajele mecanismelor cu camă sunt : • uzura mare a celor două elemente mobile (camă şi tachet) pe suprafeţele de
contact , ceea ce poate modifica legea de mişcare a mecanismului ; • dificultăţi de execuţie precisă a profilului camei ; • apariţia unor rezistenţe suplimentare (de frecare) şi vibraţii, din cauza
contactului, de regulă forţat, dintre camă şi tachet (prin intermediul arcurilor). Primul dezavantaj se înlătură prin utilizarea unor materiale rezistente la uzură
pentru camă şi tachet şi prin tratamentul termic al suprafeţelor în contact. Pentru micşorarea uzurii, contactul între tachet şi camă se poate realiza prin intermediul unei role, ceea ce face ca frecarea de alunecare să fie înlocuită cu frecarea de rostogolire, fără modificarea legii de mişcare a tachetului. În general, camele execută o mişcare de rotaţie, putînd avea şi o mişcare de translaţie sau de oscilaţie în jurul unui punct fix. Tachetul poate avea o mişcare translaţie sau o mişcare de oscilaţie (fig. 2.28 ).
Fig. 2.28
2.3.1. Analiza mecanismelor cu camă . Analiza cinematică a mecanismului cu camă urmăreşte determinarea deplasărilor,
a vitezelor şi acceleraţiilor tachetului atunci când se cunosc: tipul mecanismului cu camă, dimensiunile elementelor şi profilul camei. Analiza cinematică se poate face prin metode grafice, grafo-analitice sau analitice .
În cazul metodelor grafo-analitice şi analitice , se înlocuieşte cupla superioară a mecanismlui cu camă printr-un lanţ cu cuple inferioare şi în felul acesta, analiza mecanismelor cu came se reduce la analiza mecanismelor cu cuple inferioare , cu metodele proprii acestor mecanisme .
Dezavantajul metodei transformarii mecanismelor cu came , în mecanisme echivalente cu cuple inferioare , constă în faptul că trebuie cunoscută poziţia centrului de curbură al profilului în orice punct al acestuia .
Deplasarea , viteza şi acceleraţia tachetului se pot determina pe cale analitică , plecându-se de la ecuaţia profilului camei în coordonate polare .

47
2.3.2. Sinteza mecanismului cu camă Fig.2.29 Sinteza mecanismului cu camă urmăreşte : • determinarea profilului camei ; • determinarea parametrilor geometrici de bază ai mecanismului , atunci când se
dă legea de mişcare a tachetului . Funcţionarea unui mecanism cu camă se caracterizează în general , prin 4 faze de
mişcare a tachetului . Unghiul cu care se roteşte cama în timpul unei faze se numeşte unghi de fază . Fazele de funcţionare ale mecanismului cu camă sunt (fig. 2.30) :
Fig. 2.30
− faza de staţionare inferioară ( unghi de fază ϕ4 ) în care tachetul stationează în
poziţia extremă inferioară . Fazele de staţionare pot lipsi . Deplasarea maximă a tachetului , în faza de ridicare sau de coborâre , se numeşte
cursa tachetului h , în cazul tachetului de translaţie şi amplitudine în cazul tachetului oscilant .
Un parametru de bază a mecanismului cu camă , de care depinde funcţionarea acestuia , precum şi dimensiunile de gabarit ale acestuia , este unghiul de presiune, care reprezintă unghiul format de normala NN , după care se transmite forţa de la camă la tachet , când se neglijează frecarea , cu direcţia vitezei tachetului , ambele fiind considerate în punctul de contact B dintre camă şi tachet .
În punctul B de contact dintre camă şi tachet sunt suprapuse punctele B1 , de pe camă şi B2 de pe tachet .
Dacă se consideră mecanismul cu camă şi tachet cu rolă în mişcare de translaţie , se poate realiza analiza acestui mecanism utilizând mecanismul înlocuitor , cu cuple inferioare , care este mecanismul biela manivela OEDC (fig.2.29) .
Deplasarea s a tachetului este : s = ( r –r . cos ϕ ) – ( l – l . cos β)
l . sin β = r . sin α ⇒ sin β = ϕsinlr
Prin derivare se obţine v şi a .
- faza de ridicare ( unghi de fază ϕ1 ) în care tachetul se îndepărtează de centrul camei; - faza de stationare superioară ( unghi de fază ϕ2 ) în care tachetul stationează în poziţia extremă superioară ; - faza de coborâre ( unghi de fază ϕ3 ) , în care tachetul se apropie de centrul camei;

48
Rezultă : Fig. 2.31
tg α = ( ) oo1
1
1B
2B
rsdds
rsdds
vv
+ϕ=
+ωϕ
ω=
Din punct de vedere geometric este necesar ca raza minimă să fie cât mai mică, pentru ca să rezulte un gabarit mic .
Adoptarea legii de mişcare , pentru fazele de ridicare şi de coborâre , este determinată de 2 criterii :
• mişcarea tachetului trebuie să satisfacă cerinţele impuse de procesul tehnologic, executat de maşina din care face parte mecanismul ;
• mecanismul trebuie să aibă o comportare dinamică bună , care constă în evitarea şocurilor şi vibraţiilor , precum şi în obţinerea unor valori reduse pentru forţele de inerţie . Şocurile pot fi : dure , atunci cand viteza prezintă discontinuitaţi infinite ; şi moi , atunci cand acceleraţia are discontinuităţi finite.
Forţele de inerţie sunt proporţionale cu acceleraţia şi deci rezultă că valorile maxime ale acceleraţiilor trebuie sa fie cât mai reduse .
Cele mai uzuale legi de mişcare ale tachetului sunt : legea liniară a deplasării tachetului , legea sinusoidală , uniformă , trapezoidală de variaţie a acceleraţiei tachetului. Legea liniară de deplasare a tachetului va fi o funcţie liniară de unghiul de rotaţie ϕ al camei şi satisface cerinţele unor procese tehnologice , cum sunt : bobinarea , strunjirea etc. Să considerăm cazul unui mecanism cu camă axial , având profilul camei simplu format din curbe care dau tachetului o lege de mişcare liniară (la o rotaţie completă a camei, tachetul execută o cursă de ridicare şi o cursă de coborîre) (fig. 2.32). Viteza de translaţie a tachetului va fi :
v = ϕ
ω=ϕ
ϕ=
dds
dtd
dds
dtds
1 Dar: ϕ
=ω d
dsv
1
vB2 = vB1 . tg α vB1 = ω1 . ρ = ω1 . ( s+ ro )
vB2 = ϕ
ω=ϕ
ϕ=
dds
dtd
dds
dtds
1 in care :
- ϕ1este unghiul de rotaţie la centrul camei ; - ω1 este viteza unghiulară a camei ; - ρ =s + ro , este raza vectoare a punctului B ; - ro este raza de curbură minimă a camei ; - s deplasarea tachetului .

49
Fig. 2.32
2
2
21 d
sdaϕ
=ω
= 0 ⇒ ϕ
=ω d
dsv
1 = C1 ⇒ s = C1 ϕ + C2
Constantele de integrare se determină din condiţiile iniţiale şi finale .
Pentru : ϕ = 0 ⇒ v = vo ⇒ C1 = 1
ovω
s = 0 ⇒ C2 = 0
Pentru ϕ = ϕ1 ⇒ S = h ⇒ h = 1
ovω
. ϕ1
Parametrii cinematici pentru faza de ridicare vor fi :
a = 0 ; v = vo = 1
1.hϕω
; s = 1
.hϕϕ
Dacă se reprezintă aceste ecuaţii în coordonate rectangulare rezultă ,că deplasarea tachetului variază liniar , viteza este constantă şi pozitivă în faza de ridicare şi constantă şi negativă în faza de coborăre . Pentru faza de staţionare superioară şi inferioară , viteza este 0 . Rezultă că viteza are variaţii bruşte pentru trecerea de la o fază la alta , deci acceleraţiile au teoretic valori infinite şi deci rezultă solicitări dinamice mari , din cauza forţelor de inerţie . Datorită deformaţiilor elastice ale elementelor aflate în contact, rezultă solicitări dinamice cu valori mari ,dar finite .
Ecuatia s = 1
.hϕϕ
= K.ϕ reprezintă spirala lui Arhimede .
Legea de variaţie sinusoidală a acceleraţiei tachetului Dacă se alege legea de variaţie sinusoidală a acceleraţiei tachetului , în distribuţia de acceleraţii vor dispare salturile , finite sau infinite , generatoare de şocuri . Să considerăm această lege sub forma generală :
2
2
2 dsdaϕ
=ω
= C1 . sin C2 ϕ
Integrându-se de două ori se obţine:
a = 2
22
1 dsd
ddv
dtd
ddv
dtdv
ϕω=
ϕω=
ϕϕ
=
2
2
21 d
sdaϕ
=ω
În cazul unei mişcări uniforme a tachetului , tachetul efectuează cursa de ridicare h cu acceleratia zero şi deci :

50
ϕ
=ω d
dsv = −
2
1
CC
cos C2 ϕ + C3 , şi
s = − 22
1
CC
sin C2 ϕ +C3 . ϕ + C4
Dacă se admite o sinusoidă simetrică la unghiul ϕ = ϕ1 / 2, acceleraţia a = 0 , astfel că rezultă :
0 =C1 sin C2 21ϕ ⇒ C2 =
1
.2ϕπ
Dar condiţiile la limită iniţiale şi finale , sunt : Pentru ϕ = 0 , avem s = 0 ⇒ C4 = 0 ;
v = 0 ⇒ C1 = 21
h.2ϕπ
iar pentru ϕ = ϕ1 avem: s = h ⇒ C3 = 1
hϕ
Relaţiile care exprimă cinematica mişcării tachetului devin :
2
2
2 dsdaϕ
=ω
= 21
h.2ϕπ
sin ϕϕπ
1
h.2 ;
ϕ
=ω d
dsv =
1
hϕ
(1 − cos ϕϕπ
1
2) ;
s = h . (1ϕϕ
− ϕϕπ
π 1
2sin21
)
Fig. 2.33
Diagramele de variaţie ale spaţiului , vitezei şi acceleraţiei pentru legea de variaţie sinusoidală a acceleraţiei , sunt prezentate în figura 2.33. Acceleraţia maximă redusă are valoarea :
21max
2h2a
ϕπ
=⎟⎠⎞
⎜⎝⎛ω
, pentru : ϕ = ϕ1/4

51
Alegerea legii de mişcare a tachetului La alegerea legii de mişcare a tachetului este necesar să se ţină seama şi de
următoarele consideraţii : • mecanismele trebuie să funcţioneze fără şocuri puternice (dure) , acestea fiind
admise numai la mecanismele la care cama are mişcare lentă de rotaţie şi tachetul are masă mică ;
• şocurile moi (elastice) nu sunt dorite în mecanism ; de aceea , valoarea acceleraţiilor trebuie limitată la minimum (chiar la zero);
• valoarea maximă a acceleraţiei elementului condus trebuie să fie , după posibilităţi , cât mai mică .
În majoritatea cazurilor , în rezolvarea problemelor de sinteză a mecanismelor cu camă , legea de variaţie a acceleraţiei tachetului este criteriul dinamic esenţial .
Forţele de inerţie cele mai mici sunt date de cama cu variaţie trapezoidală (cu racordări sinusoidale ale acceleraţiei ) şi cama cosinusoidală .
2.3.3. Transmiterea forţelor la mecanismul cu camă Pe lângă realizarea unor legi de mişcare impuse ale tachetului ,mecanismul cu
camă trebuie să asigure transmiterea mişcării sub acţiunea unor forţe fără să existe pericolul de blocare a mecanismului .
Să considerăm un mecanism cu camă şi tachet de translaţie , asupra căruia acţionează o forţă rezistentă Q (fig. 2.34) .
Fig. 2.34
Pentru : tg αcr = ⎟⎠⎞
⎜⎝⎛ +µ
ba21
1 ⇒ P → ∞ , iar αcr se numeste unghi de presiune
critic . Pentru α = αcr , mecanismul se autoblochează, întrucât pentru învingerea unei
rezistenţe Q oricât de mici , este necesară din partea camei o forţă P infinit de mare . La proiectarea mecanismului cu camă , trebuie urmărit ca : α ≤ αadm. < αcr
Ecuaţiile de echilibru ale forţelor care acţionează asupra tachetului sunt :
N2 − N1 + P . sin α = 0 P . cos α − Q − µ . N1 − µ . N2 = 0 N2 . b − a P sin α = 0 , rezulta :
N2 = ba.P
. sin α , N1 = P (1 + ba
) . sin α , şi :
P = α⎟
⎠⎞
⎜⎝⎛ +µ−α sin.
ba21cos
Q
Dacă α = 0 ⇒ N1 = N2 = 0 ⇒ P = Q
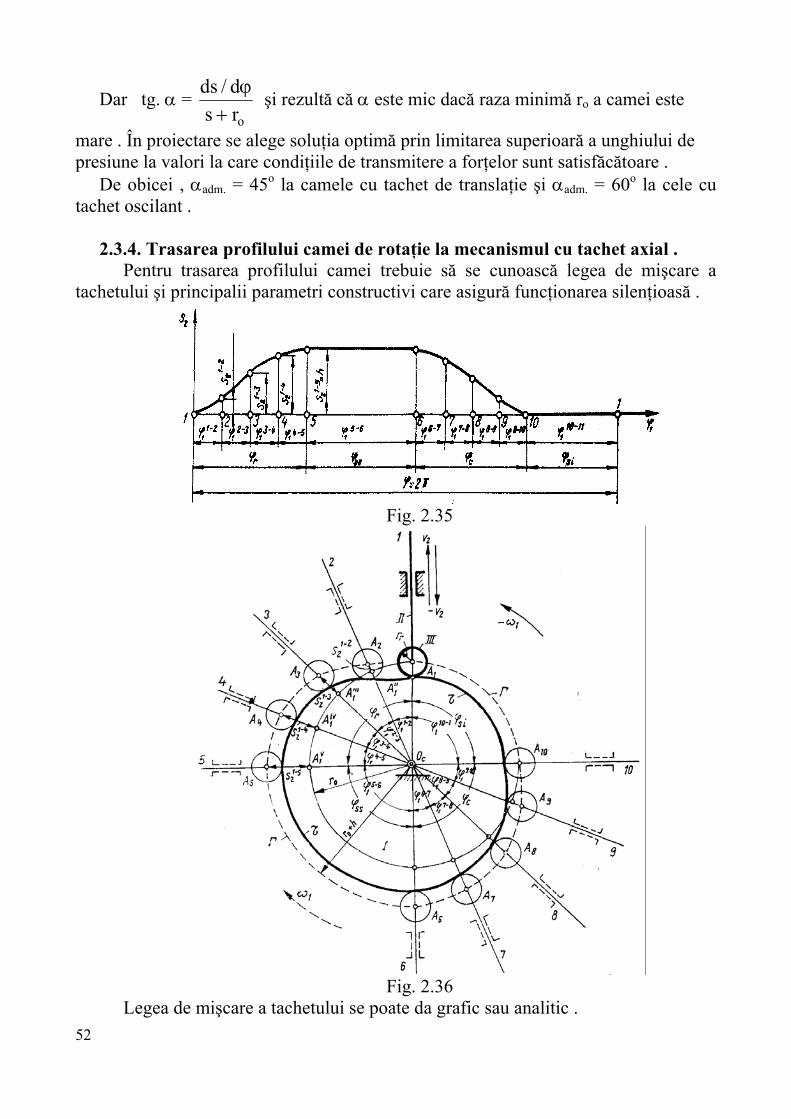
52
Dar tg. α = ors
d/ds+
ϕ şi rezultă că α este mic dacă raza minimă ro a camei este
mare . În proiectare se alege soluţia optimă prin limitarea superioară a unghiului de presiune la valori la care condiţiile de transmitere a forţelor sunt satisfăcătoare .
De obicei , αadm. = 45o la camele cu tachet de translaţie şi αadm. = 60o la cele cu tachet oscilant .
2.3.4. Trasarea profilului camei de rotaţie la mecanismul cu tachet axial .
Pentru trasarea profilului camei trebuie să se cunoască legea de mişcare a tachetului şi principalii parametri constructivi care asigură funcţionarea silenţioasă .
Fig. 2.35
Fig. 2.36
Legea de mişcare a tachetului se poate da grafic sau analitic .
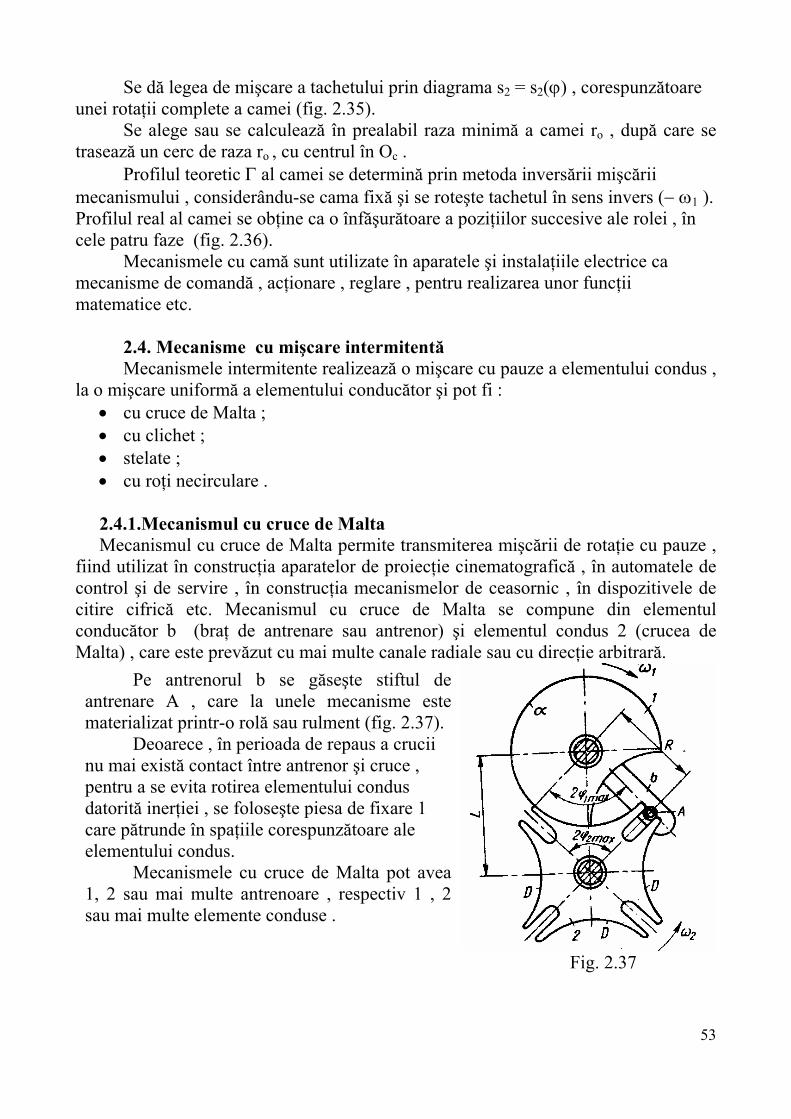
53
Se dă legea de mişcare a tachetului prin diagrama s2 = s2(ϕ) , corespunzătoare unei rotaţii complete a camei (fig. 2.35).
Se alege sau se calculează în prealabil raza minimă a camei ro , după care se trasează un cerc de raza ro , cu centrul în Oc .
Profilul teoretic Γ al camei se determină prin metoda inversării mişcării mecanismului , considerându-se cama fixă şi se roteşte tachetul în sens invers (− ω1 ). Profilul real al camei se obţine ca o înfăşurătoare a poziţiilor succesive ale rolei , în cele patru faze (fig. 2.36).
Mecanismele cu camă sunt utilizate în aparatele şi instalaţiile electrice ca mecanisme de comandă , acţionare , reglare , pentru realizarea unor funcţii matematice etc.
2.4. Mecanisme cu mişcare intermitentă Mecanismele intermitente realizează o mişcare cu pauze a elementului condus , la o mişcare uniformă a elementului conducător şi pot fi :
• cu cruce de Malta ; • cu clichet ; • stelate ; • cu roţi necirculare . 2.4.1.Mecanismul cu cruce de Malta Mecanismul cu cruce de Malta permite transmiterea mişcării de rotaţie cu pauze ,
fiind utilizat în construcţia aparatelor de proiecţie cinematografică , în automatele de control şi de servire , în construcţia mecanismelor de ceasornic , în dispozitivele de citire cifrică etc. Mecanismul cu cruce de Malta se compune din elementul conducător b (braţ de antrenare sau antrenor) şi elementul condus 2 (crucea de Malta) , care este prevăzut cu mai multe canale radiale sau cu direcţie arbitrară.
Fig. 2.37
Pe antrenorul b se găseşte stiftul de antrenare A , care la unele mecanisme este materializat printr-o rolă sau rulment (fig. 2.37).
Deoarece , în perioada de repaus a crucii nu mai există contact între antrenor şi cruce , pentru a se evita rotirea elementului condus datorită inerţiei , se foloseşte piesa de fixare 1 care pătrunde în spaţiile corespunzătoare ale elementului condus.
Mecanismele cu cruce de Malta pot avea 1, 2 sau mai multe antrenoare , respectiv 1 , 2 sau mai multe elemente conduse .

54
Dacă se notează cu z , numărul de canale ale crucii şi cu 2ϕ2 unghiul dintre 2 canale alăturate , pentru o rotaţie completă a elementului conducător, valoarea acestui
unghi este : 2ϕ2 = Z2π
⇒ ϕ2 = Zπ
Unghiul de rotaţie a elementului coducător în timpul cât se roteşte crucea ,este :
2ϕ1 = 2.( )2 2ϕ−π
= π (1 − )Z2
Unghiul corespunzător perioadei de oprire a elementului condus va fi :
2π − 2ϕ1 = π. (1 + )Z2
Timpul de mişcare al crucii este :
tm = 11
1
n302π
=ωϕ
π (1 − )Z2
= 1n
30(1 − )
Z2
Timpul de repaus al crucii este :
tr = 11
1
n3022
=ω
ϕ−π (1 + )
Z2
Timpul de rotaţie completă a elementului 1 va fi :
T = tm + tr = 1
2ωπ
Se notează cu Km = z1
21
Ttm −= şi se numeşte coeficient de mişcare .
Se notează cu Kr = z1
21
Ttr += coeficientul de repaus .
Mecanismul funcţionează dacă : Km > 0 ⇒ Z ≥ 3
Raportul K = 2Z2Z
KK
r
m
+−
= se numeşte coeficientul timpului de lucru al
mecanismului şi are valori impuse la mecanismele utilizate în automatizări . 2.4.2.Mecanismul cu clichet
Mecanismul cu clichet este format dintr-un element dinţat 1 , care are o dantură specifică şi se numeşte roată de clichet şi un element condus 2 , numit clichet , care poate fi utilizat pentru antrenarea roţii , sau blocarea ei ( fig. 2.38). Determinarea condiţiilor de funcţionare ale mecanismului cu clichet are la bază poziţia axei de oscilaţie a clichetului faţă de normala dusă la jumătatea înălţimii flancului activ al dintelui .
În poziţia I , centrul de oscilatie O2 al clichetului se găseşte deasupra normalei nn . Condiţia de funcţionare în acest caz este ca clichetul să poată fi introdus în angrenare :

55
F . l . tg α + Q . a ≥ µ . F . l ⇒ Q ≥ a
)tg.(l.F α−µ
Dacă Q = 0 ⇒ tg α > µ = tg ϕ ⇒ α>ϕ II. Centrul O2 se află pe normala nn :
Rezultă: Q . a > µ . F . l III. Centrul O2 se găseşte sub normala nn . În acest caz funcţionarea este
deficitară întrucât apare tendinţa de expulzare a clichetului din angrenare . Pentru a se evita acest lucru trebuie ca :
µ . F. l + Q . a ≥ F . l . tgα ⇒ Q ≥ a
)tg.(l.F µ−α
Fig. 2.38
Pentru a se evita acest lucru trebuie ca :
µ . F. l + Q . a ≥ F . l . tgα ⇒ Q ≥ a
)tg.(l.F µ−α
Mecanismele cu clichet se folosesc în general la turaţii mici , întrucăt , la turaţii mari produc zgomot şi şocuri . Mecanismele cu clichet sunt utilizate în construcţia mecanismelor de
ceasornic,relee de timp , mecanisme de avans , numărătoare de impulsuri , mecanisme de acţionare (motoare pas cu pas ) , mecanisme de armare a dispozitivelor de activare a contactelor electrice etc.
2.5. Mecanisme de blocare
Mecanismele de blocare servesc la introducerea sau eliminarea unor semnale program , la oprirea temporară a elementului mobil , într-un sens de mişcare sau în ambele , într-o anumită poziţie a lui . Mecanismele de blocare pot fi :

56
• cu elemente dinţate şi profilate (fig.2.39) ; • cu elemente lise (fig.2.40)
Fig. 2. 39 Mecanismele de blocare pot bloca mişcarea de translaţie sau rotaţie . Funcţional , mecanismele de blocare pot fi : • comandate ; • semiautomate ; • automate . La mecanismele comandate , blocarea sau deblocarea se realizează prin comanda
exterioară care poate fi : - mecanică ; - electrică ; - pneumatică .
La mecanismele automate , blocarea sau deblocarea se realizează de la sine , la atingerea valorii limită , a unui parametru funcţional (forţă sau moment ) .
Mecanismele de blocare semiautomate funcţionează ca mecanisme comandate într-un sens de mişcare şi automate în celălalt sens .
2.5.1. Mecanisme de blocare comandate Aceste mecanisme pot fi cu elemente dinţate sau de fricţiune . La mecanismele de blocare cu elemente dinţate , unghiul de înclinare al
elementului de blocare α = (10 − 20)o . Un unghi de pană foarte mic ar necesita o putere foarte mare pentru realizarea blocării , în timp ce la un unghi foarte mare , blocarea ar deveni nesigură (fig.2.39).
Mecanismele prin fricţiune permit blocarea în orice poziţie a elementului mobil, forţa necesară pentru crearea frecării putându-se realiza printr-un şurub (fig.2.43) sau prin efect de pană .
Fig.2.40
Fig.2.41

57
Fig.2.42
Fig.2.43 Fig.2.44
Pentru fixarea suportului aparatelor se utilizează soluţia prezentată în fig.2.44 . Aparatul se fixează pe suportul 1, fixat pe bila 2 .
Tija 3 este exentrică faţă de axa butonului 4 . Datorită excentrităţii e , între arborele 3 şi piesa mobilă 5 apare efectul de pană,
bila fiind blocată în suportul 6. Pentru ca bila să fie blocată , trebuie ca pe conturul de lucru al excentricului să se respecte condiţia α < ρ , α fiind unghiul de pantă al excentricului , iar ρ este unghiul de frecare dintre excentric şi piesa 5 .
În mecanismele de blocare comandate pot fi utilizate ca elemente intermediare de blocare , bilele .
Fig.2.45 Fig.2.46 Pentru interblocarea tastelor se pot utiliza soluţiile din fig.2.45. La soluţia din fig.2.46 , grosimea t a pârghiei tastei de acţionare este egală cu
jocul total s dintre două bile , în situaţia în care toate celelalte bile sunt tangente . La apăsarea unei alte taste , aceasta nu-si poate realiza cursa h , deoarece între
bile nu mai este spaţiu liber .
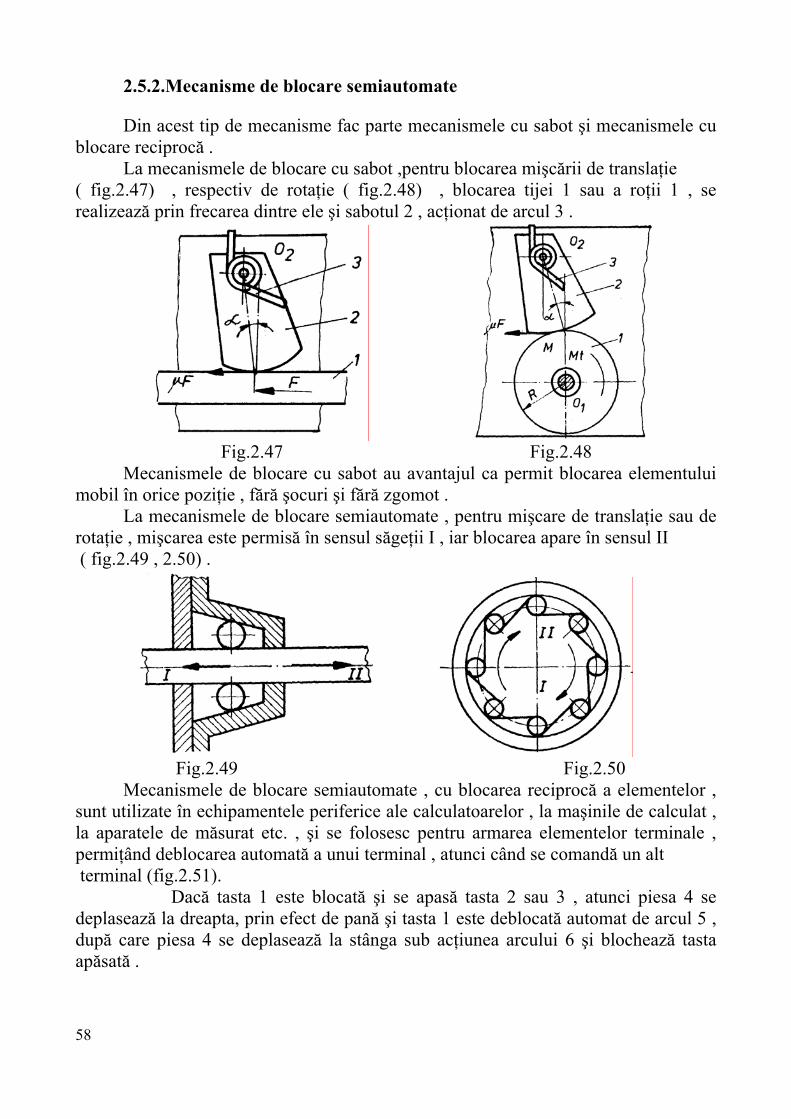
58
2.5.2.Mecanisme de blocare semiautomate
Din acest tip de mecanisme fac parte mecanismele cu sabot şi mecanismele cu blocare reciprocă .
La mecanismele de blocare cu sabot ,pentru blocarea mişcării de translaţie ( fig.2.47) , respectiv de rotaţie ( fig.2.48) , blocarea tijei 1 sau a roţii 1 , se realizează prin frecarea dintre ele şi sabotul 2 , acţionat de arcul 3 .
Fig.2.47 Fig.2.48 Mecanismele de blocare cu sabot au avantajul ca permit blocarea elementului
mobil în orice poziţie , fără şocuri şi fără zgomot . La mecanismele de blocare semiautomate , pentru mişcare de translaţie sau de
rotaţie , mişcarea este permisă în sensul săgeţii I , iar blocarea apare în sensul II ( fig.2.49 , 2.50) .
Fig.2.49 Fig.2.50
Mecanismele de blocare semiautomate , cu blocarea reciprocă a elementelor , sunt utilizate în echipamentele periferice ale calculatoarelor , la maşinile de calculat , la aparatele de măsurat etc. , şi se folosesc pentru armarea elementelor terminale , permiţând deblocarea automată a unui terminal , atunci când se comandă un alt terminal (fig.2.51).
Dacă tasta 1 este blocată şi se apasă tasta 2 sau 3 , atunci piesa 4 se deplasează la dreapta, prin efect de pană şi tasta 1 este deblocată automat de arcul 5 , după care piesa 4 se deplasează la stânga sub acţiunea arcului 6 şi blochează tasta apăsată .
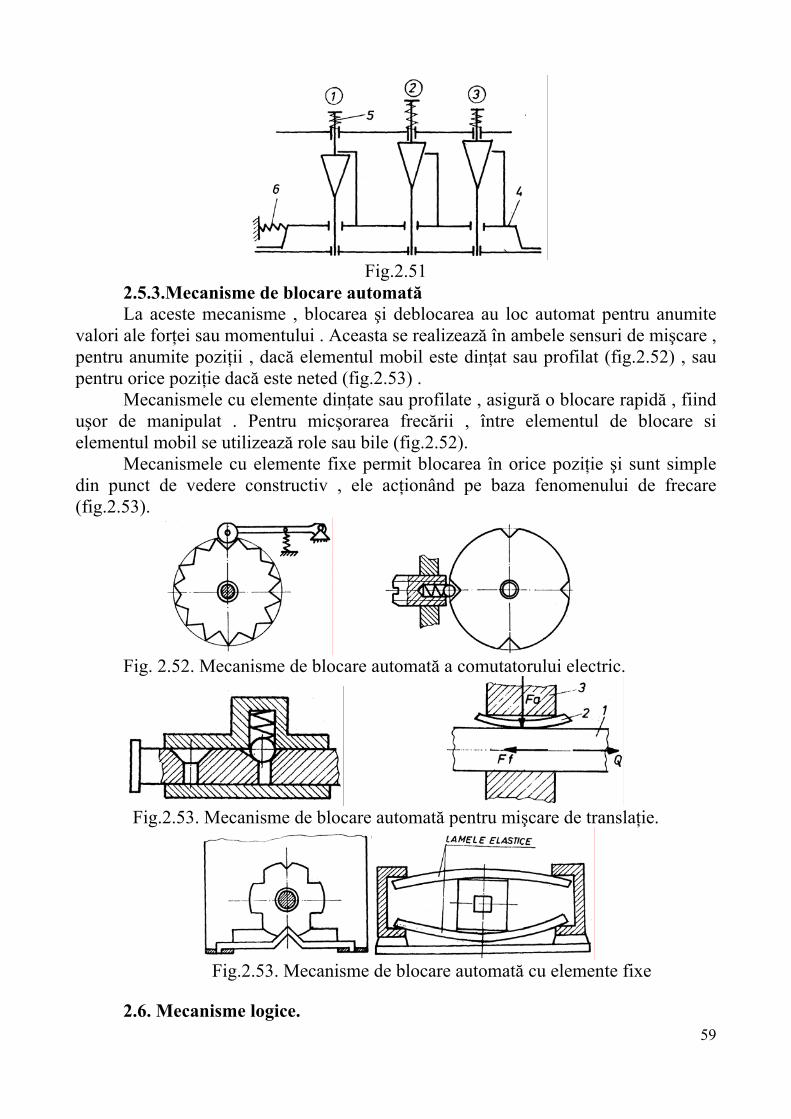
59
Fig.2.51
2.5.3.Mecanisme de blocare automată La aceste mecanisme , blocarea şi deblocarea au loc automat pentru anumite
valori ale forţei sau momentului . Aceasta se realizează în ambele sensuri de mişcare , pentru anumite poziţii , dacă elementul mobil este dinţat sau profilat (fig.2.52) , sau pentru orice poziţie dacă este neted (fig.2.53) .
Mecanismele cu elemente dinţate sau profilate , asigură o blocare rapidă , fiind uşor de manipulat . Pentru micşorarea frecării , între elementul de blocare si elementul mobil se utilizează role sau bile (fig.2.52).
Mecanismele cu elemente fixe permit blocarea în orice poziţie şi sunt simple din punct de vedere constructiv , ele acţionând pe baza fenomenului de frecare (fig.2.53).
Fig. 2.52. Mecanisme de blocare automată a comutatorului electric.
Fig.2.53. Mecanisme de blocare automată pentru mişcare de translaţie.
Fig.2.53. Mecanisme de blocare automată cu elemente fixe
2.6. Mecanisme logice.
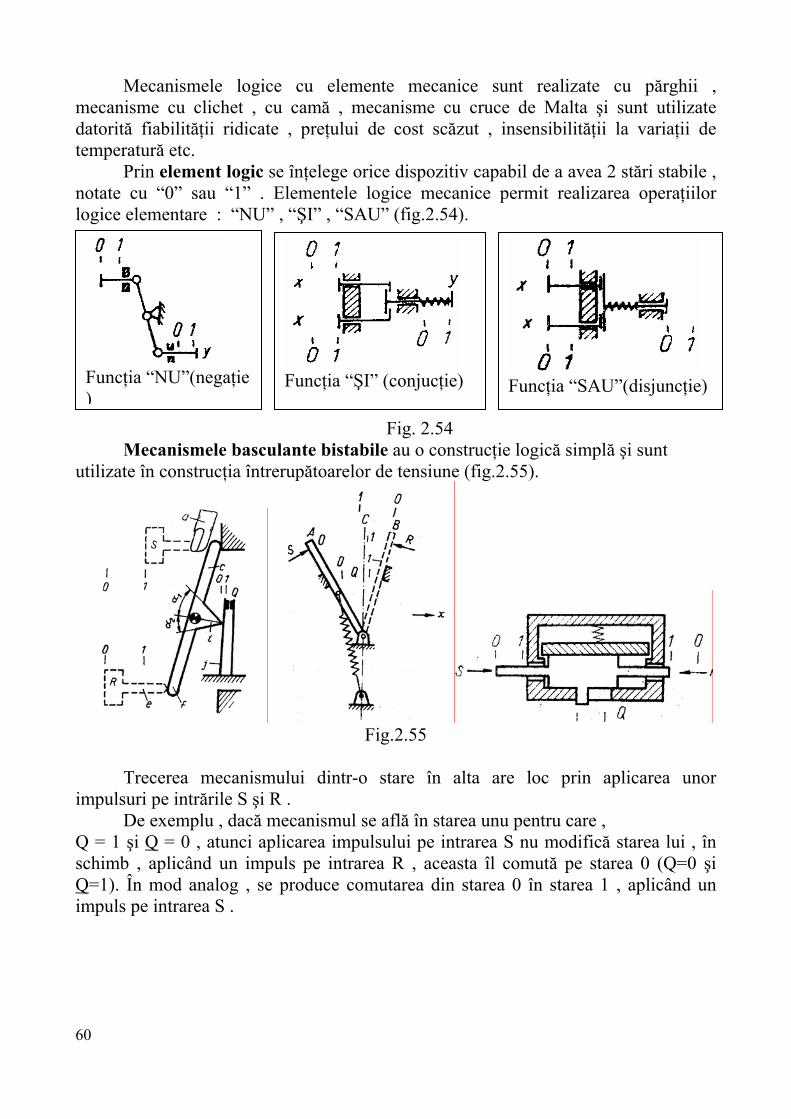
60
Mecanismele logice cu elemente mecanice sunt realizate cu părghii , mecanisme cu clichet , cu camă , mecanisme cu cruce de Malta şi sunt utilizate datorită fiabilităţii ridicate , preţului de cost scăzut , insensibilităţii la variaţii de temperatură etc.
Prin element logic se înţelege orice dispozitiv capabil de a avea 2 stări stabile , notate cu “0” sau “1” . Elementele logice mecanice permit realizarea operaţiilor logice elementare : “NU” , “ŞI” , “SAU” (fig.2.54).
Fig. 2.54 Mecanismele basculante bistabile au o construcţie logică simplă şi sunt
utilizate în construcţia întrerupătoarelor de tensiune (fig.2.55).
Fig.2.55
Trecerea mecanismului dintr-o stare în alta are loc prin aplicarea unor
impulsuri pe intrările S şi R . De exemplu , dacă mecanismul se află în starea unu pentru care ,
Q = 1 şi Q = 0 , atunci aplicarea impulsului pe intrarea S nu modifică starea lui , în schimb , aplicând un impuls pe intrarea R , aceasta îl comută pe starea 0 (Q=0 şi Q=1). În mod analog , se produce comutarea din starea 0 în starea 1 , aplicând un impuls pe intrarea S .
Funcţia “NU”(negaţie )
Funcţia “ŞI” (conjucţie)
Funcţia “SAU”(disjuncţie)
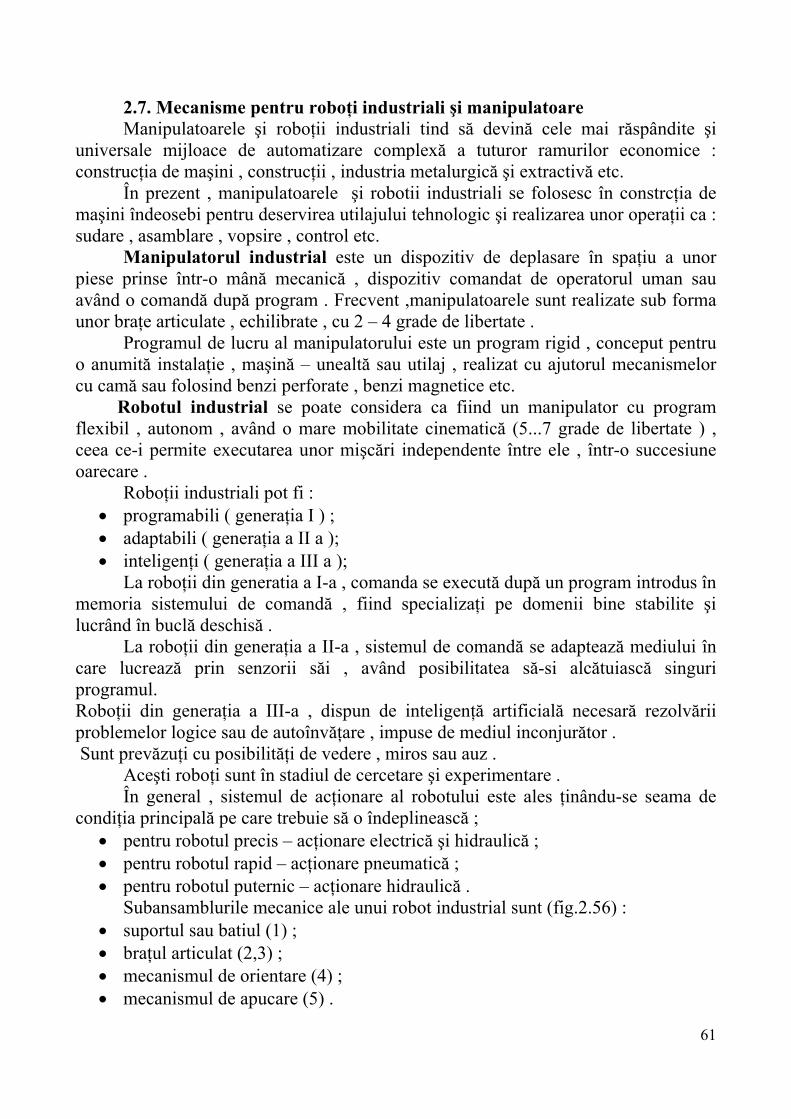
61
2.7. Mecanisme pentru roboţi industriali şi manipulatoare Manipulatoarele şi roboţii industriali tind să devină cele mai răspândite şi
universale mijloace de automatizare complexă a tuturor ramurilor economice : construcţia de maşini , construcţii , industria metalurgică şi extractivă etc.
În prezent , manipulatoarele şi robotii industriali se folosesc în constrcţia de maşini îndeosebi pentru deservirea utilajului tehnologic şi realizarea unor operaţii ca : sudare , asamblare , vopsire , control etc.
Manipulatorul industrial este un dispozitiv de deplasare în spaţiu a unor piese prinse într-o mână mecanică , dispozitiv comandat de operatorul uman sau având o comandă după program . Frecvent ,manipulatoarele sunt realizate sub forma unor braţe articulate , echilibrate , cu 2 – 4 grade de libertate .
Programul de lucru al manipulatorului este un program rigid , conceput pentru o anumită instalaţie , maşină – unealtă sau utilaj , realizat cu ajutorul mecanismelor cu camă sau folosind benzi perforate , benzi magnetice etc. Robotul industrial se poate considera ca fiind un manipulator cu program flexibil , autonom , având o mare mobilitate cinematică (5...7 grade de libertate ) , ceea ce-i permite executarea unor mişcări independente între ele , într-o succesiune oarecare .
Roboţii industriali pot fi : • programabili ( generaţia I ) ; • adaptabili ( generaţia a II a ); • inteligenţi ( generaţia a III a );
La roboţii din generatia a I-a , comanda se execută după un program introdus în memoria sistemului de comandă , fiind specializaţi pe domenii bine stabilite şi lucrând în buclă deschisă .
La roboţii din generaţia a II-a , sistemul de comandă se adaptează mediului în care lucrează prin senzorii săi , având posibilitatea să-si alcătuiască singuri programul. Roboţii din generaţia a III-a , dispun de inteligenţă artificială necesară rezolvării problemelor logice sau de autoînvăţare , impuse de mediul inconjurător . Sunt prevăzuţi cu posibilităţi de vedere , miros sau auz .
Aceşti roboţi sunt în stadiul de cercetare şi experimentare . În general , sistemul de acţionare al robotului este ales ţinându-se seama de
condiţia principală pe care trebuie să o îndeplinească ; • pentru robotul precis – acţionare electrică şi hidraulică ; • pentru robotul rapid – acţionare pneumatică ; • pentru robotul puternic – acţionare hidraulică .
Subansamblurile mecanice ale unui robot industrial sunt (fig.2.56) : • suportul sau batiul (1) ; • braţul articulat (2,3) ; • mecanismul de orientare (4) ; • mecanismul de apucare (5) .
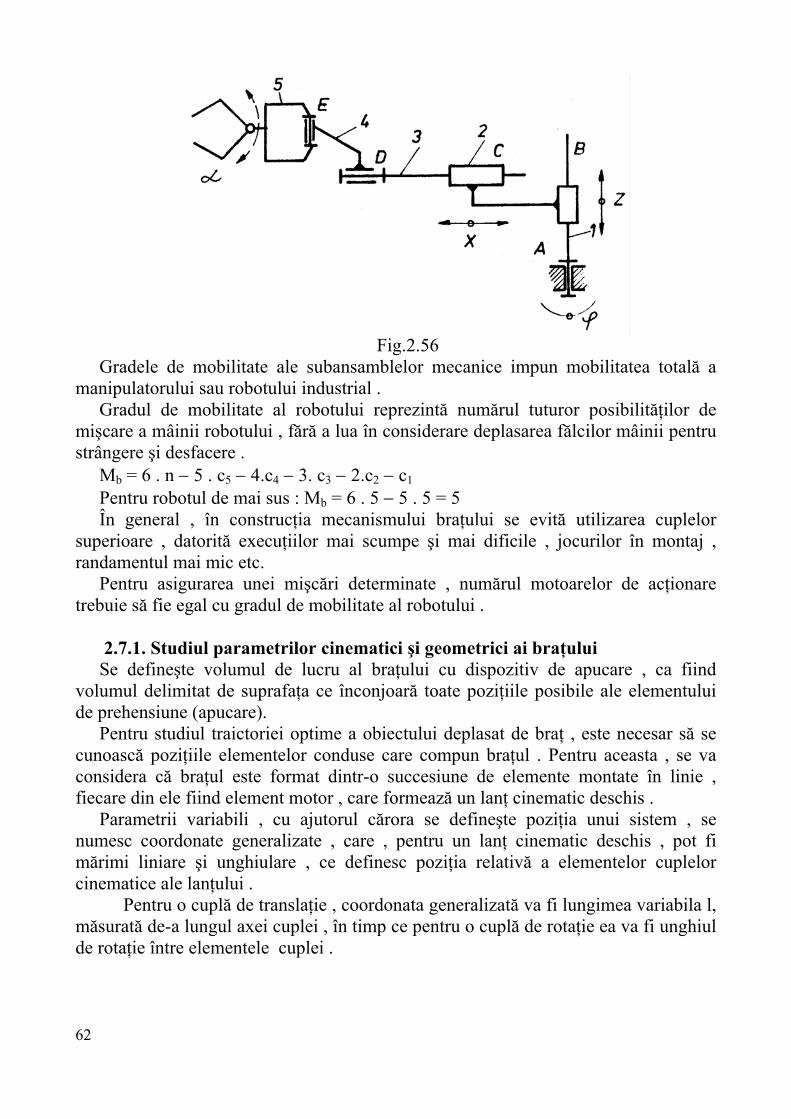
62
Fig.2.56
Gradele de mobilitate ale subansamblelor mecanice impun mobilitatea totală a manipulatorului sau robotului industrial .
Gradul de mobilitate al robotului reprezintă numărul tuturor posibilităţilor de mişcare a mâinii robotului , fără a lua în considerare deplasarea fălcilor mâinii pentru strângere şi desfacere .
Mb = 6 . n − 5 . c5 − 4.c4 − 3. c3 − 2.c2 − c1 Pentru robotul de mai sus : Mb = 6 . 5 − 5 . 5 = 5 În general , în construcţia mecanismului braţului se evită utilizarea cuplelor
superioare , datorită execuţiilor mai scumpe şi mai dificile , jocurilor în montaj , randamentul mai mic etc.
Pentru asigurarea unei mişcări determinate , numărul motoarelor de acţionare trebuie să fie egal cu gradul de mobilitate al robotului .
2.7.1. Studiul parametrilor cinematici şi geometrici ai braţului Se defineşte volumul de lucru al braţului cu dispozitiv de apucare , ca fiind
volumul delimitat de suprafaţa ce înconjoară toate poziţiile posibile ale elementului de prehensiune (apucare).
Pentru studiul traictoriei optime a obiectului deplasat de braţ , este necesar să se cunoască poziţiile elementelor conduse care compun braţul . Pentru aceasta , se va considera că braţul este format dintr-o succesiune de elemente montate în linie , fiecare din ele fiind element motor , care formează un lanţ cinematic deschis .
Parametrii variabili , cu ajutorul cărora se defineşte poziţia unui sistem , se numesc coordonate generalizate , care , pentru un lanţ cinematic deschis , pot fi mărimi liniare şi unghiulare , ce definesc poziţia relativă a elementelor cuplelor cinematice ale lanţului . Pentru o cuplă de translaţie , coordonata generalizată va fi lungimea variabila l, măsurată de-a lungul axei cuplei , în timp ce pentru o cuplă de rotaţie ea va fi unghiul de rotaţie între elementele cuplei .
63
Fig.2.57
Pentru studiul mişcării , se poate utiliza metoda matriceală sau vectorială (analitică) . Utilizarea metodei matriceale prezintă avantajul prezentării sub o formă concisă şi uşor programabilă pe calculator . Matricele mişcărilor de translaţie sau rotaţie permit determinarea coordonatelor poziţiei unui corp , dacă se cunosc în prealabil coordonatele poziţiei anterioare deplasării aceluiaşi corp .
Trecerea de la sistemul de coordonate Oj,Xj,Yj,Zj la sistemul Oi,Xi,Yi,Zi se face cu ecuaţia matriceala :
Si = Rij . Sj + To în care :

64
Si = ⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
i
i
i
ZYX
; Sj = ⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
j
j
j
Z
Y
X
în care X , Y , Z sunt coordonatele vectorului de poziţie r în sistemul de coordonate i şi j ;
To = ⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
o
o
o
ZYX
-matricea de translaţie , la trecerea de la sistemul j la i ;
Rij =
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
)ZZcos()YZcos()XZcos()ZYcos()YYcos()XYcos()ZXcos()YXcos()XXcos(
jijiji
jijiji
jijiji
− matricea cosinusurilor
unghiurilor directoare formate de noile axe de coordonate cu axele iniţiale . Să considerăm un mecanism utilizat în construcţia unui robot industrial , format
dintr-un lanţ cinematic deschis , care conţine numai cuple de clasa a V-a (fig .2.57). Ultimul element 5 are rolul de a executa o operaţie tehnologică şi se numeşte
apucător . Între numărul de elemente mobile n , şi numărul de cuple cinematice C5 , există
evident relaţia : n = c5
Dar gradul de mobilitate : M = 6 . n − 5 . c5 ⇒ M = c5 Aceasta înseamnă că , pentru a obţine o mişcare determinată toate cuplele trebuie
să fie conducătoare . În cazul unui astfel de meacnism , intervine problema de a stabili poziţia unui punct care aparţine apucătorului , în raport cu un sistem legat de elementul fix .
Pentru abordarea problemei se ataşează fiecărui element câte un sistem de coordonate:
a) – Sistemul AXoYoZo solidar cu elementul fix , cu axa AZo orientată după axa cuplei de rotaţie B şi a cuplei de translaţie A .
b) – Sistemul BX1Y1Z1 solidar cu elementul 1,cu axa BZ1 suprapusă peste AZo şi axa BX1 paralelă cu axa AXo.Punctul B este deplasat faţă de A , pe direcţia Zo , cu distanţa Z10 care constituie parametrul cuplei conducătoare A.
c) – Sistemul CX2Y2Z2 solidar cu elementul 2 , cu axa CZ2 suprapusă peste BZ1 şi axa CX2 paralelă cu axa cuplei de translaţie C . Punctul C este deplasat faţă de B , pe direcţia Z1 , cu distanţa Z21 .
Sistemul CX2Y2Z2 este rotit faţă de BX1X1Z1 în jurul axei Z1 , cu unghiul ϕ21 care este parametrul cuplei conducătoare B .
d) – Sstemul DX3Y3Z3 solidar cu elementul 3 , cu axa DX3 suprapusă peste CX2 şi axa DZ3 paralelă cu CZ2 . Punctul D este deplasat faţă de C , pe
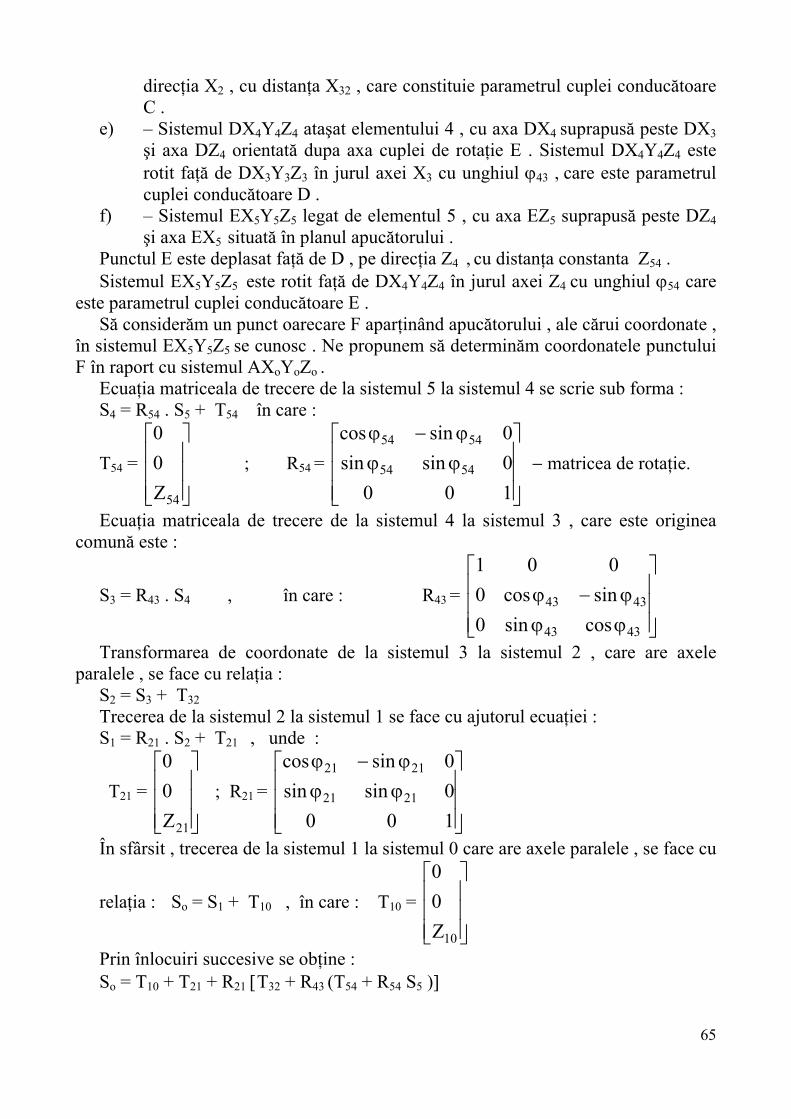
65
direcţia X2 , cu distanţa X32 , care constituie parametrul cuplei conducătoare C .
e) – Sistemul DX4Y4Z4 ataşat elementului 4 , cu axa DX4 suprapusă peste DX3 şi axa DZ4 orientată dupa axa cuplei de rotaţie E . Sistemul DX4Y4Z4 este rotit faţă de DX3Y3Z3 în jurul axei X3 cu unghiul ϕ43 , care este parametrul cuplei conducătoare D .
f) – Sistemul EX5Y5Z5 legat de elementul 5 , cu axa EZ5 suprapusă peste DZ4 şi axa EX5 situată în planul apucătorului .
Punctul E este deplasat faţă de D , pe direcţia Z4 , cu distanţa constanta Z54 . Sistemul EX5Y5Z5 este rotit faţă de DX4Y4Z4 în jurul axei Z4 cu unghiul ϕ54 care
este parametrul cuplei conducătoare E . Să considerăm un punct oarecare F aparţinând apucătorului , ale cărui coordonate ,
în sistemul EX5Y5Z5 se cunosc . Ne propunem să determinăm coordonatele punctului F în raport cu sistemul AXoYoZo .
Ecuaţia matriceala de trecere de la sistemul 5 la sistemul 4 se scrie sub forma : S4 = R54 . S5 + T54 în care :
T54 = ⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
54Z00
; R54 = ⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡ϕϕϕ−ϕ
1000sinsin0sincos
5454
5454
− matricea de rotaţie.
Ecuaţia matriceala de trecere de la sistemul 4 la sistemul 3 , care este originea comună este :
S3 = R43 . S4 , în care : R43 = ⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
ϕϕϕ−ϕ
4343
4343
cossin0sincos0
001
Transformarea de coordonate de la sistemul 3 la sistemul 2 , care are axele paralele , se face cu relaţia :
S2 = S3 + T32 Trecerea de la sistemul 2 la sistemul 1 se face cu ajutorul ecuaţiei : S1 = R21 . S2 + T21 , unde :
T21 = ⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
21Z00
; R21 = ⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡ϕϕϕ−ϕ
1000sinsin0sincos
2121
2121
În sfârsit , trecerea de la sistemul 1 la sistemul 0 care are axele paralele , se face cu
relaţia : So = S1 + T10 , în care : T10 = ⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
10Z00
Prin înlocuiri succesive se obţine : So = T10 + T21 + R21 [T32 + R43 (T54 + R54 S5 )]
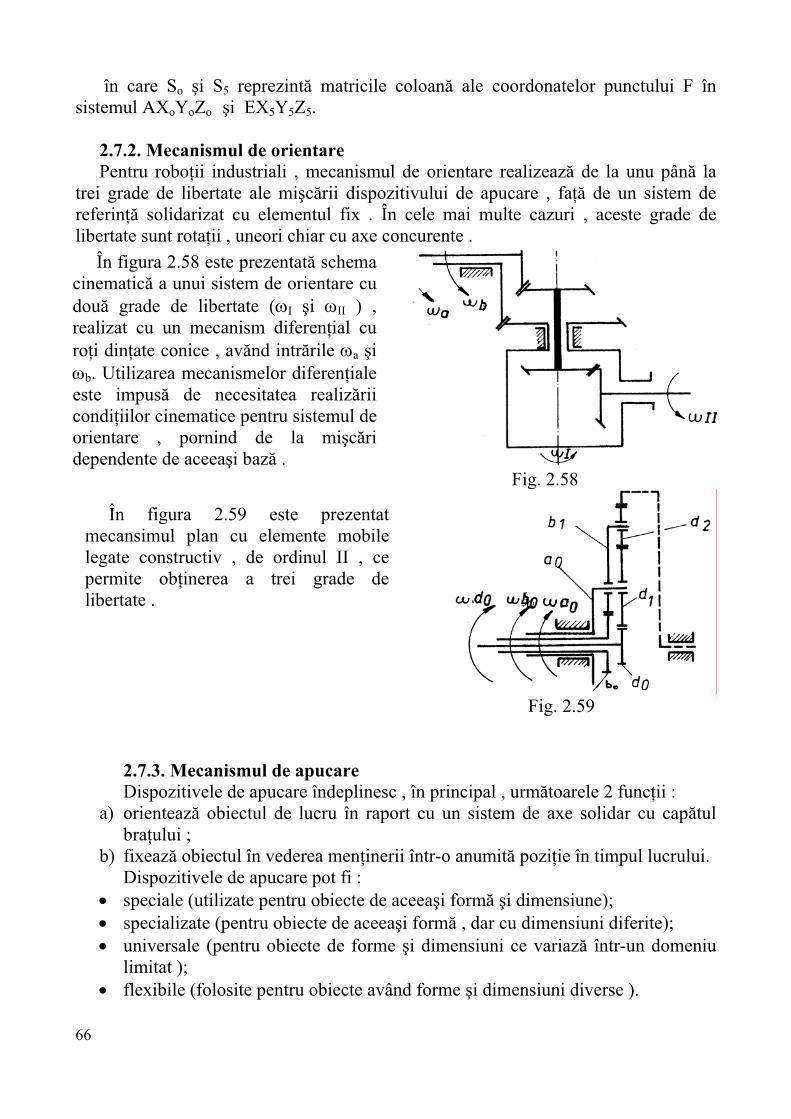
66
în care So şi S5 reprezintă matricile coloană ale coordonatelor punctului F în sistemul AXoYoZo şi EX5Y5Z5.
2.7.2. Mecanismul de orientare Pentru roboţii industriali , mecanismul de orientare realizează de la unu până la
trei grade de libertate ale mişcării dispozitivului de apucare , faţă de un sistem de referinţă solidarizat cu elementul fix . În cele mai multe cazuri , aceste grade de libertate sunt rotaţii , uneori chiar cu axe concurente .
Fig. 2.58
Fig. 2.59
2.7.3. Mecanismul de apucare Dispozitivele de apucare îndeplinesc , în principal , următoarele 2 funcţii :
a) orientează obiectul de lucru în raport cu un sistem de axe solidar cu capătul braţului ;
b) fixează obiectul în vederea menţinerii într-o anumită poziţie în timpul lucrului. Dispozitivele de apucare pot fi :
• speciale (utilizate pentru obiecte de aceeaşi formă şi dimensiune); • specializate (pentru obiecte de aceeaşi formă , dar cu dimensiuni diferite); • universale (pentru obiecte de forme şi dimensiuni ce variază într-un domeniu
limitat ); • flexibile (folosite pentru obiecte având forme şi dimensiuni diverse ).
În figura 2.58 este prezentată schema cinematică a unui sistem de orientare cu două grade de libertate (ωI şi ωII ) , realizat cu un mecanism diferenţial cu roţi dinţate conice , avănd intrările ωa şi ωb. Utilizarea mecanismelor diferenţiale este impusă de necesitatea realizării condiţiilor cinematice pentru sistemul de orientare , pornind de la mişcări dependente de aceeaşi bază .
În figura 2.59 este prezentat mecansimul plan cu elemente mobile legate constructiv , de ordinul II , ce permite obţinerea a trei grade de libertate .

67
După modul în care acţionează asupra obiectului ,dispozitivele de apucare pot fi mecanice , cu vid şi electromagnetice .În fig 2.60 sunt reprezentate scheme cinematice ale mecanismelor de apucare cu cleşti .
a) b)
c) d)
Fig. 2.60. 2.7.4.Calculul forţei de antrenare a mecanismului de apucare
Pentru strângerea piesei este necesar ca cilindrul pneumatic , hidraulic sau motorul
electric să asigure o forţă sau un moment minim de antrenare . Pentru mecanismul de apucare din fig 2.61 , sunt cunoscute mărimile a,b,c,e,α,β,ϕ .
Fig. 2.61
Forţa de apucare se obţine din ecuaţia de momente faţă de cupla de rotaţie din C (se neglijează frecarea din cuplele cinematice):
FA = F3 . =αsin.c
b Fa .
βα sin.sin.cb
unde Fa este forţa de antrenare a elementului 1 . Dar , din geometria mecanismul rezultă :
b = )sin(
aecos
aeβ−ϕ
−=
α−
rezultă :
Fa = FA . ββ−ϕ−
cos.c).(sinae
c 2

68
Capitolul 3
TRANSMISII PRIN ROŢI DE FRICŢIUNE 3.1.Generalităţi
Transmiterea şi transformarea mişcării de rotaţie se poate face prin : • roţi de fricţiune ; • roţi dinţate ; • transmisii prin curele , banda , lanţ , fir ,cablu .
Dacă se notează cu ω1 si n1 viteza unghiulară şi turaţia elementului conducător şi cu ω2 şi n2 viteza unghiulară şi turaţia elementului condus ,atunci se numeşte raport de transmitere :
i12 = ± 2
1
2
1
nn
±=ωω
Semnul ( + ) este convenţional adoptat pentru mişcări în acelaşi sens , iar semnul ( − ) în sensuri contrare . Dacă se notează cu Mt1 momentul transmis de elementul conducător , atunci momentul la elementul condus va fi :
Mt2 = i12 . η . Mt1 , în care η este randamentul transmisiei. La transmisia prin roţi de fricţiune mişcarea de roaţie de la arborele conducător
la arborele condus se transmite ca urmare a frecării între suprafeţele în contact ale roţilor de fricţiune. Roţile de fricţiune pot avea supafaţa de lucru netedă sau canelată, cilindrică, conică sau sferică. Transmisiile prin fricţiune au următoarele avantaje : construcţie şi executie simplă, funcţionare fără şocuri, cu zgomot redus, patinarea la supraşocuri etc. Dejavantaje: necesitatea unei forţe de apăsare între roţi, solicitarea suplimentară a arborilor şi lagărelor, uzură pronunţată, randament scăzut ( η = 0,8 ÷ 0,9 ).
3.2.Transmisia prin roţi de fricţiune cilindrice cu suprafaţă de contact
netedă La transmisia cu roţi de fricţiune cilindrice netede ( fig. 3.1) mişcarea de la
roata 1, care se roteşte cu viteza unghiulară ω1 şi este apăsată cu forţa Q, se transmite la roata 2, datorită forţei de frecare tangenţiale . Dacă nu există alunecare între suprafeţele de contact, vitezele periferice ale celor două roţi sunt egale:
v = v1 = v2 = 1000.60
nD1000.60
nD 2211 π=
π ⇒ D1 . n1 = D2 . n2
Rezultă că raportul de transmitere : i12 = 1
2
2
1
2
1
DD
nn
==ωω
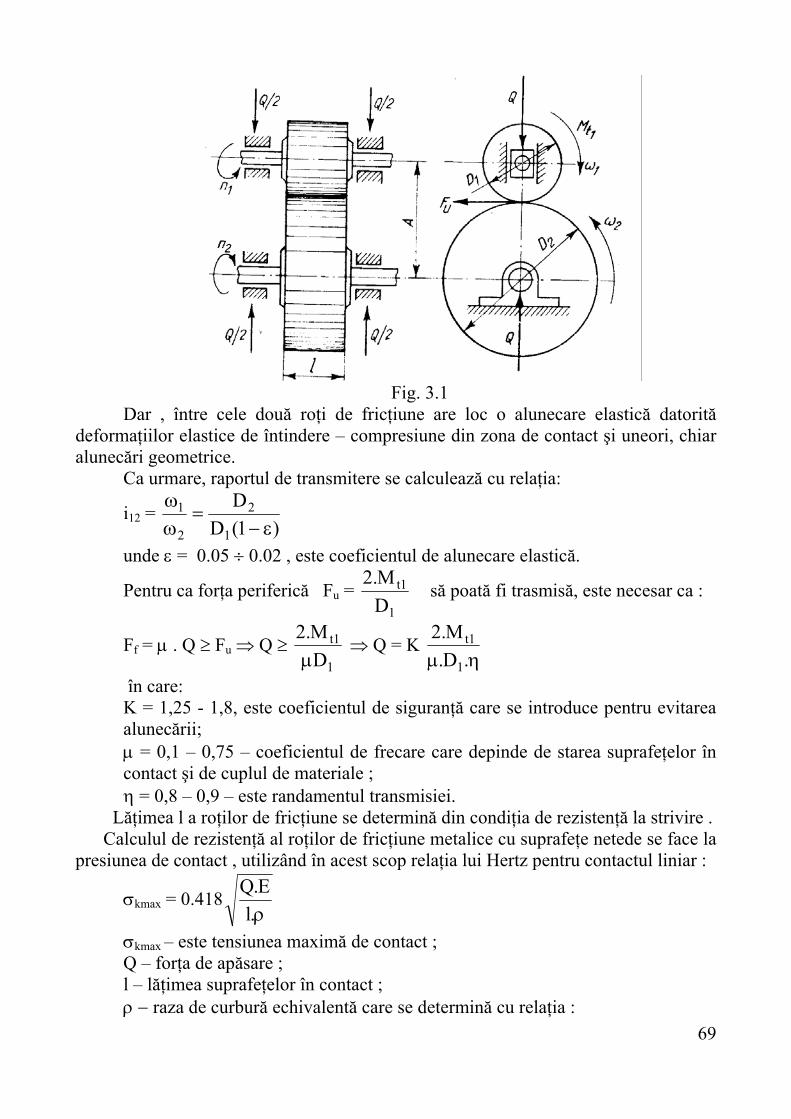
69
Fig. 3.1
Dar , între cele două roţi de fricţiune are loc o alunecare elastică datorită deformaţiilor elastice de întindere – compresiune din zona de contact şi uneori, chiar alunecări geometrice.
Ca urmare, raportul de transmitere se calculează cu relaţia:
i12 = )1(D
D
1
2
2
1
ε−=
ωω
unde ε = 0.05 ÷ 0.02 , este coeficientul de alunecare elastică.
Pentru ca forţa periferică Fu = 1
1t
DM.2
să poată fi trasmisă, este necesar ca :
Ff = µ . Q ≥ Fu ⇒ Q ≥ 1
1t
DM.2µ
⇒ Q = K ηµ .D.
M.2
1
1t
în care: K = 1,25 - 1,8, este coeficientul de siguranţă care se introduce pentru evitarea alunecării; µ = 0,1 – 0,75 – coeficientul de frecare care depinde de starea suprafeţelor în contact şi de cuplul de materiale ; η = 0,8 – 0,9 – este randamentul transmisiei.
Lăţimea l a roţilor de fricţiune se determină din condiţia de rezistenţă la strivire . Calculul de rezistenţă al roţilor de fricţiune metalice cu suprafeţe netede se face la presiunea de contact , utilizând în acest scop relaţia lui Hertz pentru contactul liniar :
σkmax = 0.418ρ.lE.Q
σkmax – este tensiunea maximă de contact ; Q – forţa de apăsare ; l – lăţimea suprafeţelor în contact ; ρ − raza de curbură echivalentă care se determină cu relaţia :

70
21 D2
D21+=
ρ ;
E = 21
21
EEE.E.2
+ , este modulul de elasticitate echivalent .
Dacă se pune condiţia ca σkmax = σa , rezultă l . Pentru roţile nemetalice , la care deformaţiile nu mai sunt proporţionale cu
forţa (ca la cele metalice) , lăţimea l se poate calcula cu relaţia simplificată : l ≥ ap
Q
unde pa este presiunea admisibilă pe unitatea de lungime .
3.3.Transmisia prin roţi de fricţiune cilindrice cu suprafaţa canelată Prin utilizarea roţilor de fricţiune cilindrice canelate , cu profilul trapezoidal al canelurilor şi cu un număr i de caneluri (i = 2÷6) , datorită efectului de pană , forţa de apăsare necesară este mai mică de câteva ori faţă de roţile cilindrice netede (fig.3.2).
Fig . 3.2
Din condiţia de rezistenţă la solicitarea de strivire rezultă :
N = b . pa = αcos
p.h a , b = αcos
h
3.4.Transmisia prin roţi de fricţiune conice
Roţile de fricţiune conice sunt utilizate pentru transmiterea mişcarii de rotaţie între arbori concurenţi . În mod obisnuit , unghiul dintre axele celor două roţi δ =δ1 + δ2 , unde δ1 şi δ2 sunt semiunghiurile la vârf ale conurilor celor două roţi (fig . 3.3). Dacă vârfurile conurilor coincid , raportul de transmisie este :
Forţa periferică ce se poate transmite :
Fu=1
1t
DM.2
≤Ff = 2 . µ . N = αµ+α
µcos.sin
Q.
Rezultă forţa de apăsare necesară transmiterii momentului de torsiune Mt1 :
Q = K ηµ .D.
M.2
1
1t (sin α + µ . cos α ) iar :
i12 = )1(D
D
1
2
2
1
ε−=
ωω
Pentru a evita blocarea roţilor (autofrânarea ) , unghiul α nu poate să scadă sub valoarea unghiului de frecare .
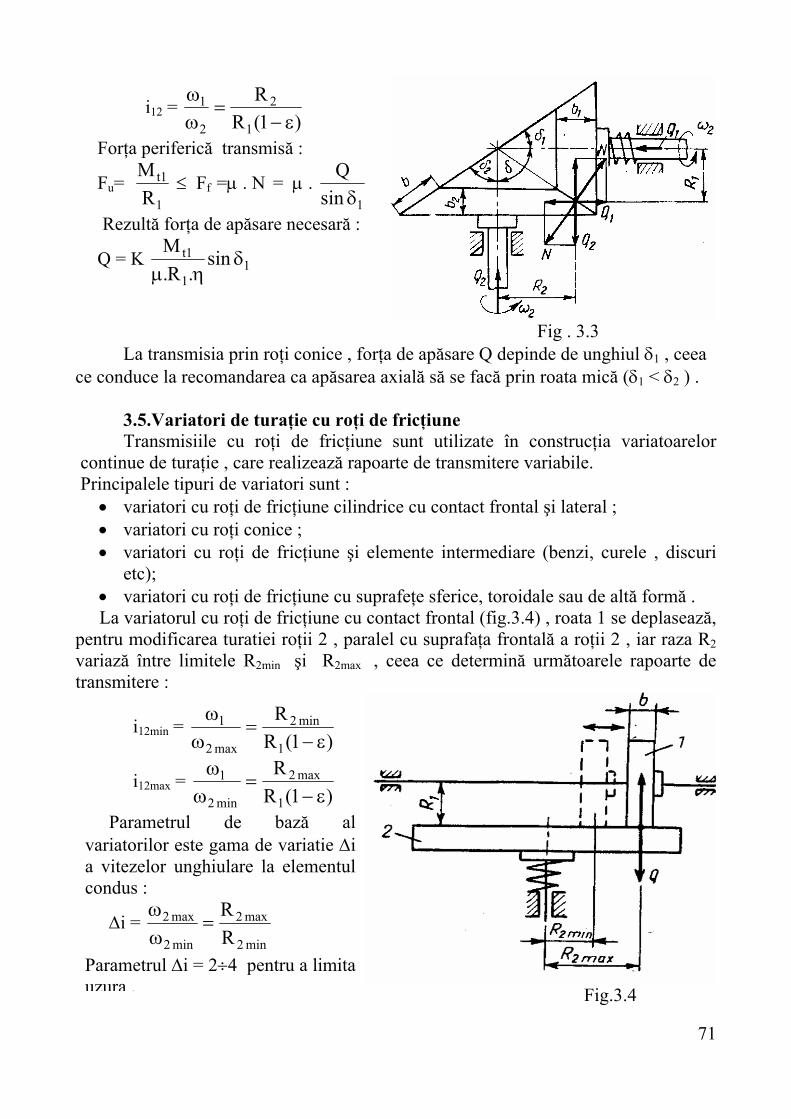
71
Fig . 3.3
La transmisia prin roţi conice , forţa de apăsare Q depinde de unghiul δ1 , ceea ce conduce la recomandarea ca apăsarea axială să se facă prin roata mică (δ1 < δ2 ) .
3.5.Variatori de turaţie cu roţi de fricţiune
Transmisiile cu roţi de fricţiune sunt utilizate în construcţia variatoarelor continue de turaţie , care realizează rapoarte de transmitere variabile. Principalele tipuri de variatori sunt : • variatori cu roţi de fricţiune cilindrice cu contact frontal şi lateral ; • variatori cu roţi conice ; • variatori cu roţi de fricţiune şi elemente intermediare (benzi, curele , discuri
etc); • variatori cu roţi de fricţiune cu suprafeţe sferice, toroidale sau de altă formă . La variatorul cu roţi de fricţiune cu contact frontal (fig.3.4) , roata 1 se deplasează,
pentru modificarea turatiei roţii 2 , paralel cu suprafaţa frontală a roţii 2 , iar raza R2 variază între limitele R2min şi R2max , ceea ce determină următoarele rapoarte de transmitere :
Fig.3.4
i12 = )1(R
R
1
2
2
1
ε−=
ωω
Forţa periferică transmisă :
Fu= 1
1t
RM
≤ Ff =µ . N = µ . 1sin
Qδ
Rezultă forţa de apăsare necesară :
Q = K 11
1t sin.R.
Mδ
ηµ
i12min = )1(R
R
1
min2
max2
1
ε−=
ωω
i12max = )1(R
R
1
max2
min2
1
ε−=
ωω
Parametrul de bază al variatorilor este gama de variatie ∆i a vitezelor unghiulare la elementul condus :
∆i = min2
max2
min2
max2
RR
=ωω
Parametrul ∆i = 2÷4 pentru a limita uzura .
72
Pentru a limita alunecarea geometrică , roata mobilă se realizează cu periferia sferică.
Fig.3.5
3.6.Variatori cu roţi de fricţiune şi elemente intermediare
Fig.3.6
3.7.Materiale Pentru transmisiile portante , roţile de fricţiune se pot realiza din oţel călit . Se realizează transmisii prin friciţiune bune , atunci când se folosesc roţi din oţel ,
cu roţi din mase plastice , textolit , cauciuc etc.Materialul nemetalic (cauciuc , fibră , azbest presat etc.)se poate realiza sub formă unui bandaj , care se montează pe roata metalică .
Variatorul cu roţi conice (fig.3.5) are avantajul unei forme constructive simple , însă are randament scăzut şi necesită dispozitive speciale pentru reglarea vitezei unghiulare .
Variatorul este format din 4 roţi conice , care se pot deplasa axial , mişcarea de la o pereche la alta transmiţându-se printr-o bandă de oţel sau curea .
Variaţia de turaţie se obţine aşezând banda , prin deplasarea roţilor , pe diferite raze .
Gama de viteze :
∆i = 2min2
2max2
min2
max2
RR
=ωω
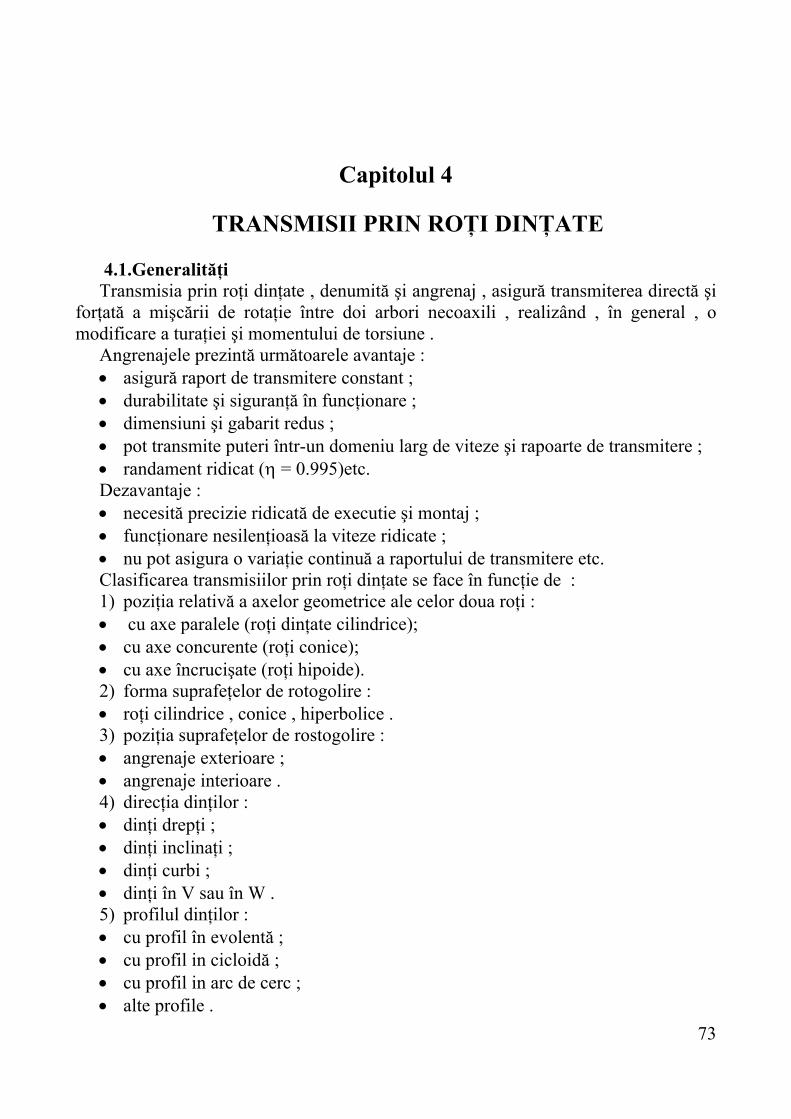
73
Capitolul 4
TRANSMISII PRIN ROŢI DINŢATE
4.1.Generalităţi Transmisia prin roţi dinţate , denumită şi angrenaj , asigură transmiterea directă şi
forţată a mişcării de rotaţie între doi arbori necoaxili , realizând , în general , o modificare a turaţiei şi momentului de torsiune .
Angrenajele prezintă următoarele avantaje : • asigură raport de transmitere constant ; • durabilitate şi siguranţă în funcţionare ; • dimensiuni şi gabarit redus ; • pot transmite puteri într-un domeniu larg de viteze şi rapoarte de transmitere ; • randament ridicat (η = 0.995)etc. Dezavantaje : • necesită precizie ridicată de executie şi montaj ; • funcţionare nesilenţioasă la viteze ridicate ; • nu pot asigura o variaţie continuă a raportului de transmitere etc. Clasificarea transmisiilor prin roţi dinţate se face în funcţie de : 1) poziţia relativă a axelor geometrice ale celor doua roţi : • cu axe paralele (roţi dinţate cilindrice); • cu axe concurente (roţi conice); • cu axe încrucişate (roţi hipoide). 2) forma suprafeţelor de rotogolire : • roţi cilindrice , conice , hiperbolice . 3) poziţia suprafeţelor de rostogolire : • angrenaje exterioare ; • angrenaje interioare . 4) direcţia dinţilor : • dinţi drepţi ; • dinţi inclinaţi ; • dinţi curbi ; • dinţi în V sau în W . 5) profilul dinţilor : • cu profil în evolentă ; • cu profil in cicloidă ; • cu profil in arc de cerc ; • alte profile .
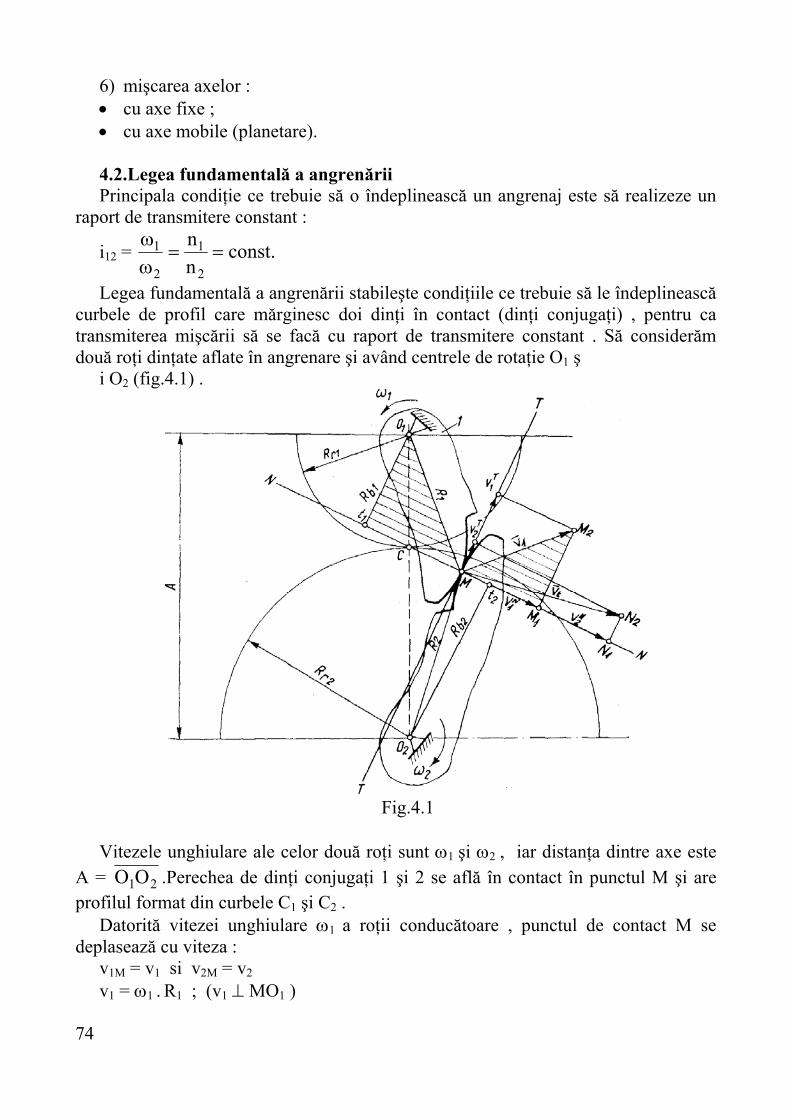
74
6) mişcarea axelor : • cu axe fixe ; • cu axe mobile (planetare). 4.2.Legea fundamentală a angrenării Principala condiţie ce trebuie să o îndeplinească un angrenaj este să realizeze un
raport de transmitere constant :
i12 = .constnn
2
1
2
1 ==ωω
Legea fundamentală a angrenării stabileşte condiţiile ce trebuie să le îndeplinească curbele de profil care mărginesc doi dinţi în contact (dinţi conjugaţi) , pentru ca transmiterea mişcării să se facă cu raport de transmitere constant . Să considerăm două roţi dinţate aflate în angrenare şi având centrele de rotaţie O1 ş
i O2 (fig.4.1) .
Fig.4.1
Vitezele unghiulare ale celor două roţi sunt ω1 şi ω2 , iar distanţa dintre axe este
A = 21OO .Perechea de dinţi conjugaţi 1 şi 2 se află în contact în punctul M şi are profilul format din curbele C1 şi C2 .
Datorită vitezei unghiulare ω1 a roţii conducătoare , punctul de contact M se deplasează cu viteza :
v1M = v1 si v2M = v2 v1 = ω1 . R1 ; (v1 ⊥ MO1 )
75
v2 = ω2 . R2 ; (v2 ⊥ MO2 ) În punctul de contact , curbele C1 şi C2 ale profilurilor au normala NN şi tangenta
TT. Descompunând v1 şi v2 după cele doua direcţii obţinem :
T2
N22
T1
N11
vvv
vvv
+=
+=
Elementele 1 şi 2 fiind rigide , transmiterea mişcării devine posibilă , numai dacă proiecţiile vitezelor 1v si 2v pe direcţia normalei comune sunt egale : N
1v = N2v
Dar : ∆O1E1M ∼ ∆MC1O1 şi ∆O2E2M ∼ ∆MC2O2
Rezultă : 1
1b
1
N1
RR
vv
= şi 2
2b
2
N2
RR
vv
=
Deci : 11b11
1bN1 .Rv.
RRv ω==
22b22
2bN2 .Rv.
RRv ω==
Rezultă : 11b .R ω = 22b .R ω ⇒ 1b
2b
2
112 R
Ri =ωω
=
Rezultă că i12 = const. Dacă: 1b
2b
RR
= const.
⇒ 1i1
POA
POPOPO
RRR
1222
21
1b
2b1b +==+
=+
Centrele de rotaţie O1 şi O2 fiind fixe , rezultă că : A = POPO 21 + = 21OO = const . Deci , pentru ca i12 să fie constant trebuie ca P să fie fix . Punctul P se numeşte
polul angrenării şi este definit ca punctul invariabil prin care trece permanent normala comună NN la profilurile conjugate ale celor doi dinţi în contact .
Polul angrenării împarte distanţa dintre axe A într-un raport constant numit raport de angrenare sau raport de transmitere al angrenajului .
Legea fundamentală a angrenării se enunţă astfel : pentru ca angrenarea să se realizeze cu un raport de transmitere constant este necesar ca profilurile conjugate ale dinţilor să fie astfel construite încât , în timpul angrenării , normala lor comună , în punctele succesive de contact să treacă printr-un punct fix P de pe linia centrelor, numit polul angrenării .
Concluzii : a) deoarece v1 ≠ v2 şi T
2T1
N2
N1 vvvv ≠⇒= deci profilurile dinţilor în
contact se rostogolesc cu alunecare ;
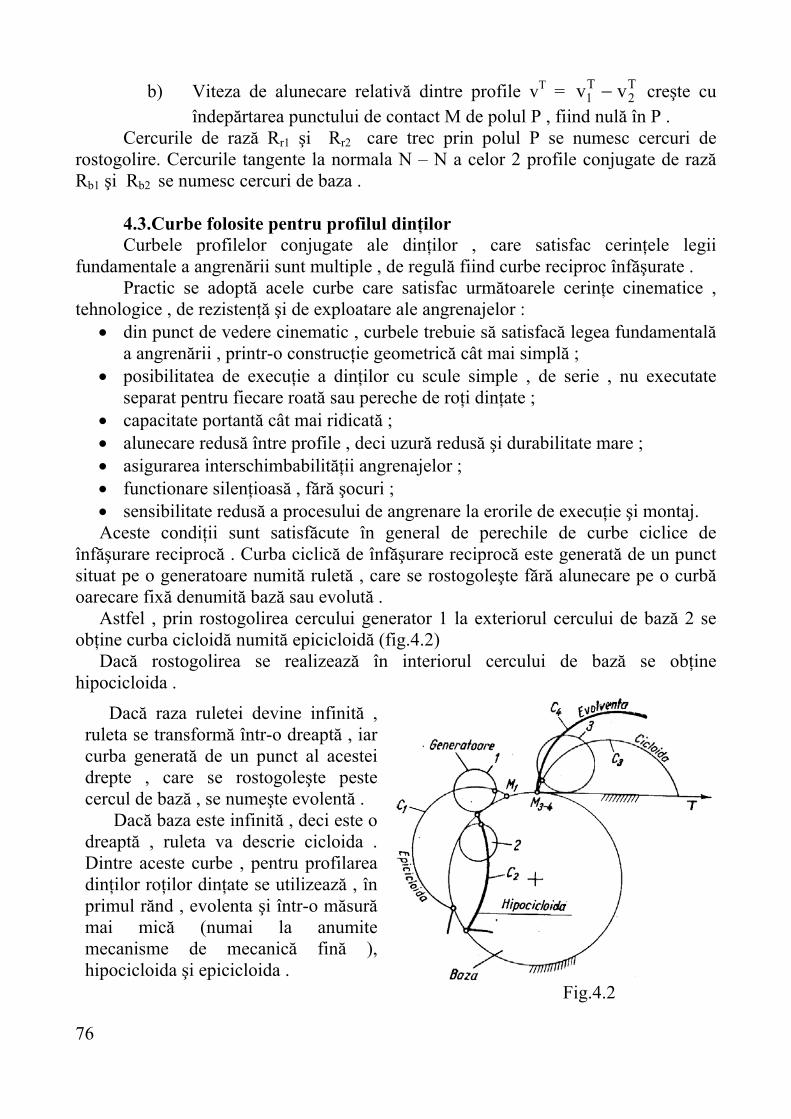
76
b) Viteza de alunecare relativă dintre profile vT = T2
T1 vv − creşte cu
îndepărtarea punctului de contact M de polul P , fiind nulă în P . Cercurile de rază Rr1 şi Rr2 care trec prin polul P se numesc cercuri de
rostogolire. Cercurile tangente la normala N – N a celor 2 profile conjugate de rază Rb1 şi Rb2 se numesc cercuri de baza .
4.3.Curbe folosite pentru profilul dinţilor Curbele profilelor conjugate ale dinţilor , care satisfac cerinţele legii
fundamentale a angrenării sunt multiple , de regulă fiind curbe reciproc înfăşurate . Practic se adoptă acele curbe care satisfac următoarele cerinţe cinematice ,
tehnologice , de rezistenţă şi de exploatare ale angrenajelor : • din punct de vedere cinematic , curbele trebuie să satisfacă legea fundamentală
a angrenării , printr-o construcţie geometrică cât mai simplă ; • posibilitatea de execuţie a dinţilor cu scule simple , de serie , nu executate
separat pentru fiecare roată sau pereche de roţi dinţate ; • capacitate portantă cât mai ridicată ; • alunecare redusă între profile , deci uzură redusă şi durabilitate mare ; • asigurarea interschimbabilităţii angrenajelor ; • functionare silenţioasă , fără şocuri ; • sensibilitate redusă a procesului de angrenare la erorile de execuţie şi montaj. Aceste condiţii sunt satisfăcute în general de perechile de curbe ciclice de
înfăşurare reciprocă . Curba ciclică de înfăşurare reciprocă este generată de un punct situat pe o generatoare numită ruletă , care se rostogoleşte fără alunecare pe o curbă oarecare fixă denumită bază sau evolută .
Astfel , prin rostogolirea cercului generator 1 la exteriorul cercului de bază 2 se obţine curba cicloidă numită epicicloidă (fig.4.2)
Dacă rostogolirea se realizează în interiorul cercului de bază se obţine hipocicloida .
Fig.4.2
Dacă raza ruletei devine infinită , ruleta se transformă într-o dreaptă , iar curba generată de un punct al acestei drepte , care se rostogoleşte peste cercul de bază , se numeşte evolentă .
Dacă baza este infinită , deci este o dreaptă , ruleta va descrie cicloida . Dintre aceste curbe , pentru profilarea dinţilor roţilor dinţate se utilizează , în primul rănd , evolenta şi într-o măsură mai mică (numai la anumite mecanisme de mecanică fină ), hipocicloida şi epicicloida .
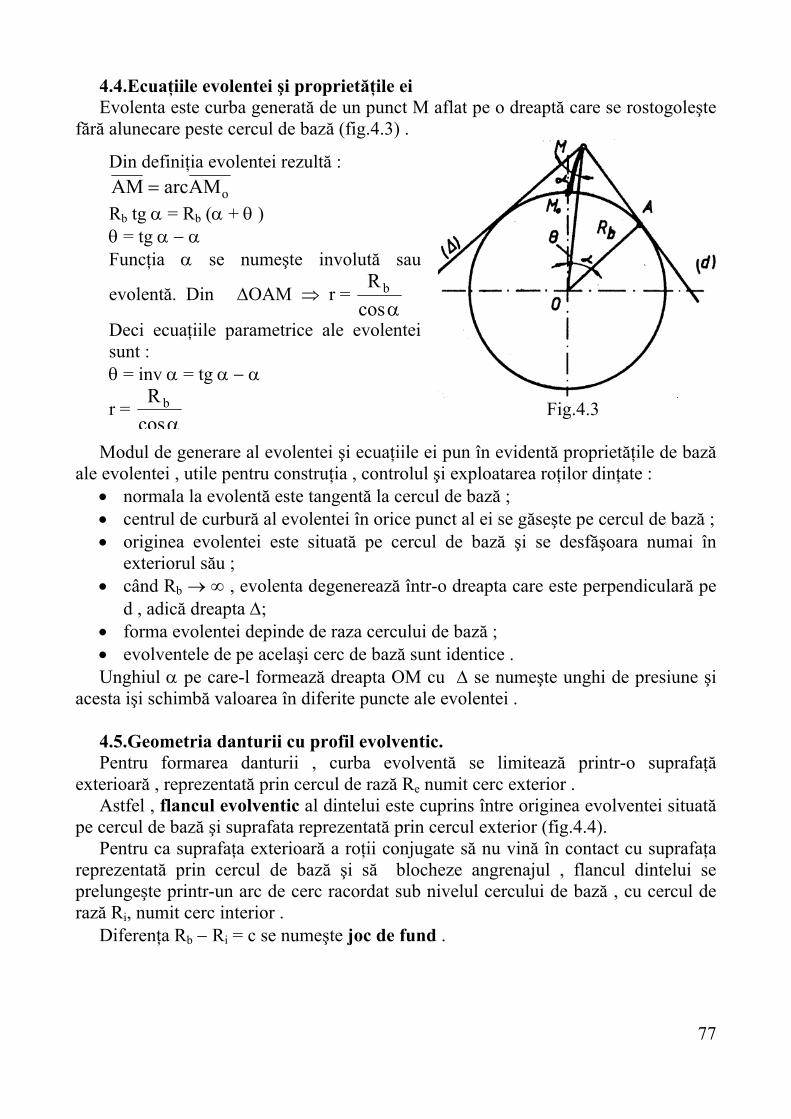
77
4.4.Ecuaţiile evolentei şi proprietăţile ei Evolenta este curba generată de un punct M aflat pe o dreaptă care se rostogoleşte
fără alunecare peste cercul de bază (fig.4.3) .
Fig.4.3
Modul de generare al evolentei şi ecuaţiile ei pun în evidentă proprietăţile de bază
ale evolentei , utile pentru construţia , controlul şi exploatarea roţilor dinţate : • normala la evolentă este tangentă la cercul de bază ; • centrul de curbură al evolentei în orice punct al ei se găseşte pe cercul de bază ; • originea evolentei este situată pe cercul de bază şi se desfăşoara numai în
exteriorul său ; • când Rb → ∞ , evolenta degenerează într-o dreapta care este perpendiculară pe
d , adică dreapta ∆; • forma evolentei depinde de raza cercului de bază ; • evolventele de pe acelaşi cerc de bază sunt identice . Unghiul α pe care-l formează dreapta OM cu ∆ se numeşte unghi de presiune şi
acesta işi schimbă valoarea în diferite puncte ale evolentei . 4.5.Geometria danturii cu profil evolventic. Pentru formarea danturii , curba evolventă se limitează printr-o suprafaţă
exterioară , reprezentată prin cercul de rază Re numit cerc exterior . Astfel , flancul evolventic al dintelui este cuprins între originea evolventei situată
pe cercul de bază şi suprafata reprezentată prin cercul exterior (fig.4.4). Pentru ca suprafaţa exterioară a roţii conjugate să nu vină în contact cu suprafaţa
reprezentată prin cercul de bază şi să blocheze angrenajul , flancul dintelui se prelungeşte printr-un arc de cerc racordat sub nivelul cercului de bază , cu cercul de rază Ri, numit cerc interior .
Diferenţa Rb − Ri = c se numeşte joc de fund .
Din definiţia evolentei rezultă : oAMarcAM =
Rb tg α = Rb (α + θ ) θ = tg α − α Funcţia α se numeşte involută sau
evolentă. Din ∆OAM ⇒ r = αcos
R b
Deci ecuaţiile parametrice ale evolentei sunt : θ = inv α = tg α − α
r = αcos
R b

78
Fig.4.4 Porţiunea din dinte cuprinsă între cercul exterior şi cercul de rostogolire se
numeşte capul dintelui , iar porţiunea cuprinsă între cercul interior şi cercul de rostogolire se numeşte piciorul dintelui . Distanţa dintre cercul exterior şi cercul interior , măsurată radial , se numeşte înălţimea dintelui :
h = a + b unde a este înălţimea capului , iar b este înălţimea piciorului dintelui . Pasul dintelui p reprezintă distanţa dintre doua flancuri omoloage , consecutive ,
măsurată pe arcul suprafeţei de rostogolire . Dacă se notează cu z numărul de dinţi al roţii şi cu Dr diametrul cercului de
rostogolire , atunci lungimea cercului de rostogolire :
π . Dr = z . p ⇒ p = zD. rπ
Lăţimea dintelui se notează prin sd , iar lungimea golului dintre dinţi prin sg şi deci : p = sd + sg Modulul m este un parametru de bază al angrenajului şi este definit prin raportul
m = πp
, valorile lui fiind standardizate .
Două roţi dinţate conjugate pot angrena dacă au acelaşi pas , deci acelaşi modul m, realizând raportul de angrenare .
Jocul de flanc j reprezintă distanţa dintre flancurile a doi dinţi care transmit un efort (fig.4.5).
Jocul la fund c reprezintă distanţa dintre vărful dintelui unei roţi şi cercul interior. Raportul de transmitere numit şi raport de angrenare este:

79
Fig.4.5 Distanţa dintre axele de rotaţie ale celor două roţi :
Ao = 2
)i1(z.m2
)zz(m2
DD 121211r2r +=
+=
+
În procesul de angrenare , punctul de contact al flancurilor conjugate ale roţilor dinţate descrie o traictorie în planul fix , care se numeşte linie de angrenare .
Această linie este o dreaptă , în cazul angrenajului evolventic , fiind suprapusă dreptei generatoare (deci normalei comune NN).
Segmentul 21SS reprezintă lungimea efectivă a liniei de angrenare . Raportul între segmentul de angrenare şi pasul de bază reprezintă gradul de
acoperire : ε = b
21
pSS
unde bp este pasul danturii măsurat pe cercul de bază .
Gradul de acoperire ε reprezintă sub aspect fizic numărul mediu de perechi de dinţi aflaţi în angrenare . Pentru ca angrenarea să fie continuă , mişcarea uniformă şi raportul de transmitere constant , este necesar ca gradul de acoperire ε > 1,1 .
Capacitatea portantă a angrenajului precum şi zgomotul acestuia depind de gradul de acoperire . Dacă ε < 1 se produc şocuri dinamice suplimentare , deoarece, în momentul ieşirii din angrenarea normală a unei perechi de dinti conjugaţi , încă nu a intrat în angrenare perechea următoare .
4.5.Cremaliera de referinţă
Fig.4.6
i12 = 1
2
11
22
11
22
1r
2r
2
1
zz
m.zm.z
p.z
p.z
DD
==
π
π==ωω
întrucât : m1 = m2 Pentru construcţia mecanismelor cu angrenaje
cilindrice se recomandă o gamă de valori ale raportului de transmitere : i12 = 1 ÷ 9,5
Dacă una dintre roţile dinţate ale angrenajului au raza cercului de bază infinit de mare, cercul de rostogolire şi cel de bază se transformă în linii drepte , iar roata se transformă într-un segment dinţat numit cremalieră (fig.4.6).
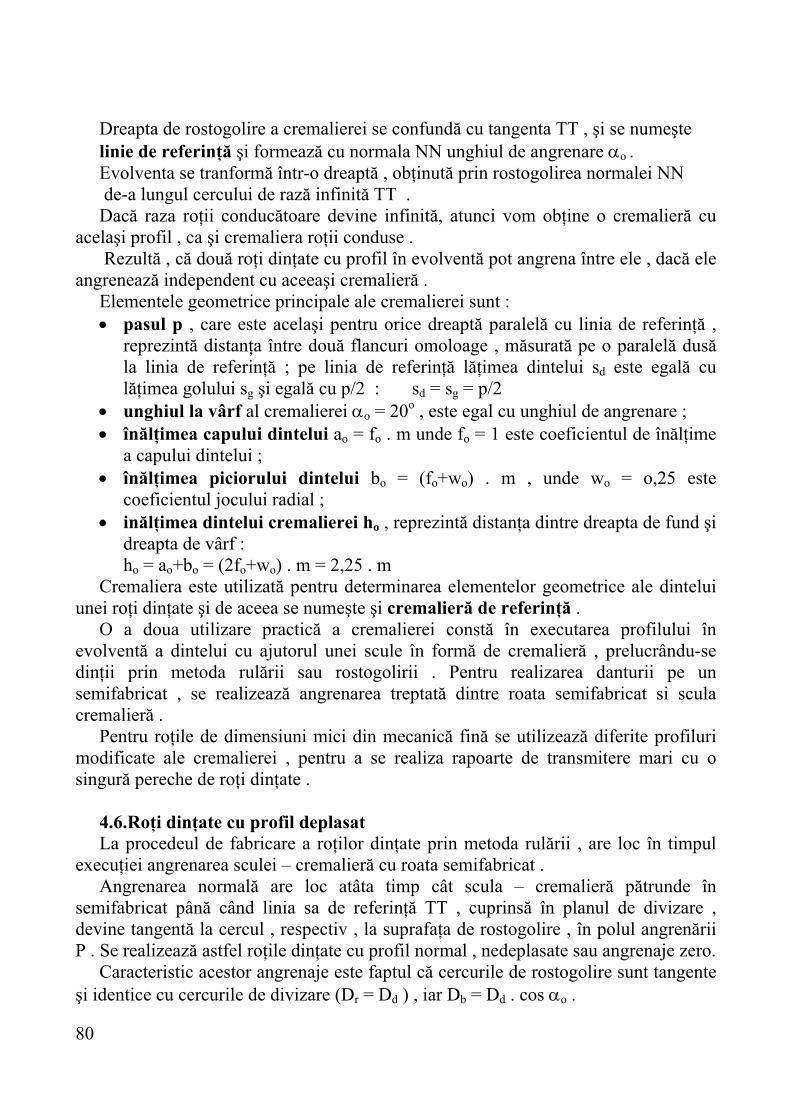
80
Dreapta de rostogolire a cremalierei se confundă cu tangenta TT , şi se numeşte linie de referinţă şi formează cu normala NN unghiul de angrenare αo . Evolventa se tranformă într-o dreaptă , obţinută prin rostogolirea normalei NN de-a lungul cercului de rază infinită TT . Dacă raza roţii conducătoare devine infinită, atunci vom obţine o cremalieră cu
acelaşi profil , ca şi cremaliera roţii conduse . Rezultă , că două roţi dinţate cu profil în evolventă pot angrena între ele , dacă ele
angrenează independent cu aceeaşi cremalieră . Elementele geometrice principale ale cremalierei sunt : • pasul p , care este acelaşi pentru orice dreaptă paralelă cu linia de referinţă ,
reprezintă distanţa între două flancuri omoloage , măsurată pe o paralelă dusă la linia de referinţă ; pe linia de referinţă lăţimea dintelui sd este egală cu lăţimea golului sg şi egală cu p/2 : sd = sg = p/2
• unghiul la vârf al cremalierei αo = 20o , este egal cu unghiul de angrenare ; • înălţimea capului dintelui ao = fo . m unde fo = 1 este coeficientul de înălţime
a capului dintelui ; • înălţimea piciorului dintelui bo = (fo+wo) . m , unde wo = o,25 este
coeficientul jocului radial ; • inălţimea dintelui cremalierei ho , reprezintă distanţa dintre dreapta de fund şi
dreapta de vârf : ho = ao+bo = (2fo+wo) . m = 2,25 . m
Cremaliera este utilizată pentru determinarea elementelor geometrice ale dintelui unei roţi dinţate şi de aceea se numeşte şi cremalieră de referinţă .
O a doua utilizare practică a cremalierei constă în executarea profilului în evolventă a dintelui cu ajutorul unei scule în formă de cremalieră , prelucrându-se dinţii prin metoda rulării sau rostogolirii . Pentru realizarea danturii pe un semifabricat , se realizează angrenarea treptată dintre roata semifabricat si scula cremalieră .
Pentru roţile de dimensiuni mici din mecanică fină se utilizează diferite profiluri modificate ale cremalierei , pentru a se realiza rapoarte de transmitere mari cu o singură pereche de roţi dinţate .
4.6.Roţi dinţate cu profil deplasat La procedeul de fabricare a roţilor dinţate prin metoda rulării , are loc în timpul
execuţiei angrenarea sculei – cremalieră cu roata semifabricat . Angrenarea normală are loc atâta timp cât scula – cremalieră pătrunde în
semifabricat până când linia sa de referinţă TT , cuprinsă în planul de divizare , devine tangentă la cercul , respectiv , la suprafaţa de rostogolire , în polul angrenării P . Se realizează astfel roţile dinţate cu profil normal , nedeplasate sau angrenaje zero.
Caracteristic acestor angrenaje este faptul că cercurile de rostogolire sunt tangente şi identice cu cercurile de divizare (Dr = Dd ) , iar Db = Dd . cos αo .
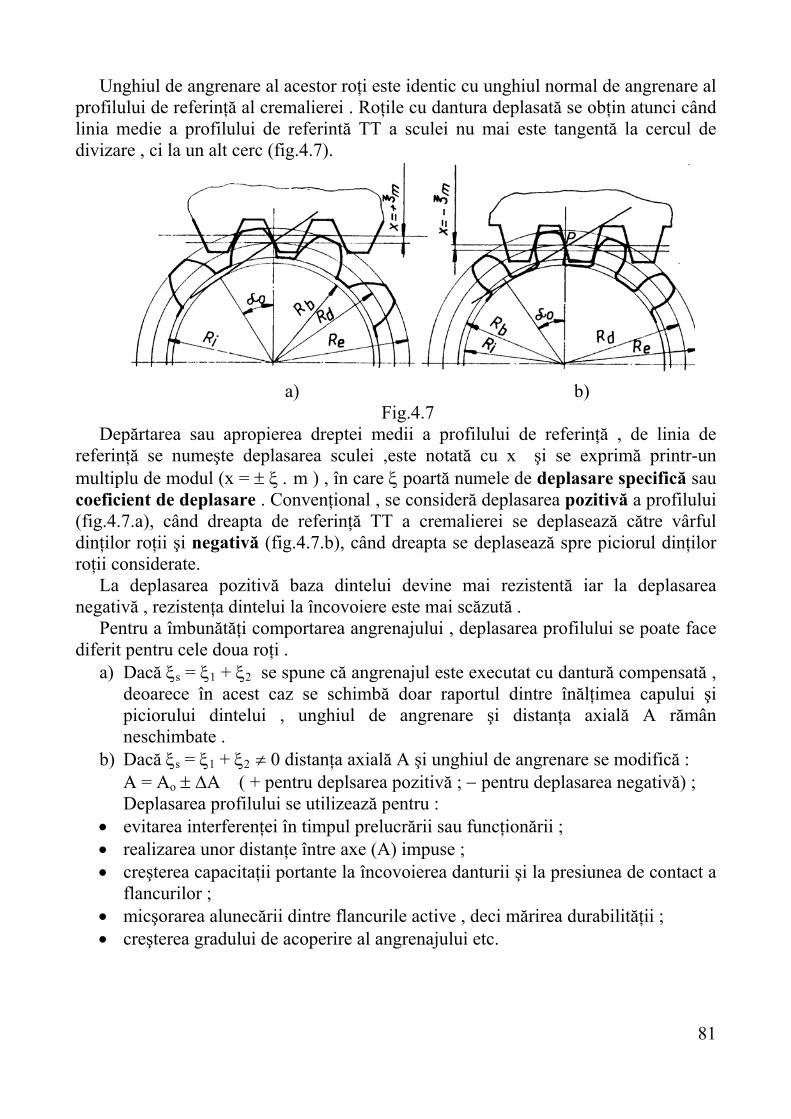
81
Unghiul de angrenare al acestor roţi este identic cu unghiul normal de angrenare al profilului de referinţă al cremalierei . Roţile cu dantura deplasată se obţin atunci când linia medie a profilului de referintă TT a sculei nu mai este tangentă la cercul de divizare , ci la un alt cerc (fig.4.7).
a) b)
Fig.4.7 Depărtarea sau apropierea dreptei medii a profilului de referinţă , de linia de
referinţă se numeşte deplasarea sculei ,este notată cu x şi se exprimă printr-un multiplu de modul (x = ± ξ . m ) , în care ξ poartă numele de deplasare specifică sau coeficient de deplasare . Convenţional , se consideră deplasarea pozitivă a profilului (fig.4.7.a), când dreapta de referinţă TT a cremalierei se deplasează către vârful dinţilor roţii şi negativă (fig.4.7.b), când dreapta se deplasează spre piciorul dinţilor roţii considerate.
La deplasarea pozitivă baza dintelui devine mai rezistentă iar la deplasarea negativă , rezistenţa dintelui la încovoiere este mai scăzută .
Pentru a îmbunătăţi comportarea angrenajului , deplasarea profilului se poate face diferit pentru cele doua roţi .
a) Dacă ξs = ξ1 + ξ2 se spune că angrenajul este executat cu dantură compensată , deoarece în acest caz se schimbă doar raportul dintre înălţimea capului şi piciorului dintelui , unghiul de angrenare şi distanţa axială A rămân neschimbate .
b) Dacă ξs = ξ1 + ξ2 ≠ 0 distanţa axială A şi unghiul de angrenare se modifică : A = Ao ± ∆A ( + pentru deplsarea pozitivă ; − pentru deplasarea negativă) ;
Deplasarea profilului se utilizează pentru : • evitarea interferenţei în timpul prelucrării sau funcţionării ; • realizarea unor distanţe între axe (A) impuse ; • creşterea capacitaţii portante la încovoierea danturii şi la presiunea de contact a
flancurilor ; • micşorarea alunecării dintre flancurile active , deci mărirea durabilităţii ; • creşterea gradului de acoperire al angrenajului etc.
82
4.8.Calculul angrenajelor cilindrice cu dinţi drepţi Cauzele care pot provoca scoaterea angrenajelor din funcţionare pot fi grupate în două grupe :
a. - cauze care duc la distrugerea flancurilor dinţilor ; - ciupire (pitting) : - limitată ;
- progresivă ; - gripare ; - uzura abrazivă şi adezivă ;
- strivirea flancului ; - coroziunea de contact ; - fisuri pe flanc ;
- exfoliere . b. - cauze care duc la ruperea dinţilor :
- ruperea prin oboseală ; - ruperea prin suprasarcini ; - desprinderea de aşchii . Calculul de rezistenţă al angrenajelor constă în determinarea dimensiunilor
minime şi a condiţiilor de ungere ale angrenajului , la care nu are loc nici unul dintre fenomenele de deteriorare .
Principalele cauze care duc la distrugerea angrenajelor sunt : ciupirea (pittingul) , care este rezultatul unei stări hertziene de tensiune şi ruperea prin încovoiere a dintelui , considerând secţ
iunea periculoasă la baza dintelui . Verificarea la gripaj se aplică mai rar , numai angrenajelor puternic solicitate ,
la turaţii mari , cu alunecare relativă între flancuri foarte intensă . Dimensionarea angrenajelor comportă două etape distincte de calcul : a) Dimensionarea geometrică şi cinematică , urmată de verificarea în limitele angrenării corecte . b) Calculul de rezistenţă şi verificarea durabilitaţii . 4.8.1.Forţele la angrenajele cilindrice cu dinţi drepţi Forţa normală la flancul dintelui roţii dinţate cilindrice este orientată după
direcţia normalei comune NN şi aceasta se distribuie pe fâşia de contact dintre dinţii conjugaţi , producând presiuni specifice de contact pe suprafaţa flancurilor active şi o stare de eforturi unitare în secţiunea dintelui (fig.4.8).
Punctul de aplicaţie al forţei Fn se deplasează pe flancul activ . Forţa de frecare care apare datorită alunecării dintre flancuri , se neglijează . Forţa normală Fn se determină în funcţie de puterea sau momentul de torsiune Mt1 transmis prin pinion :
Fn = α
=cos.DM.2
RM
1r
1t
1b
1t
Forţa normală Fn se descompune în componentele : tangenţială Ft şi radială Fr :
Ft = Fn . cos α = 1r
1t
DM.2
, iar Fr = Fn . sin α = Ft .tg α
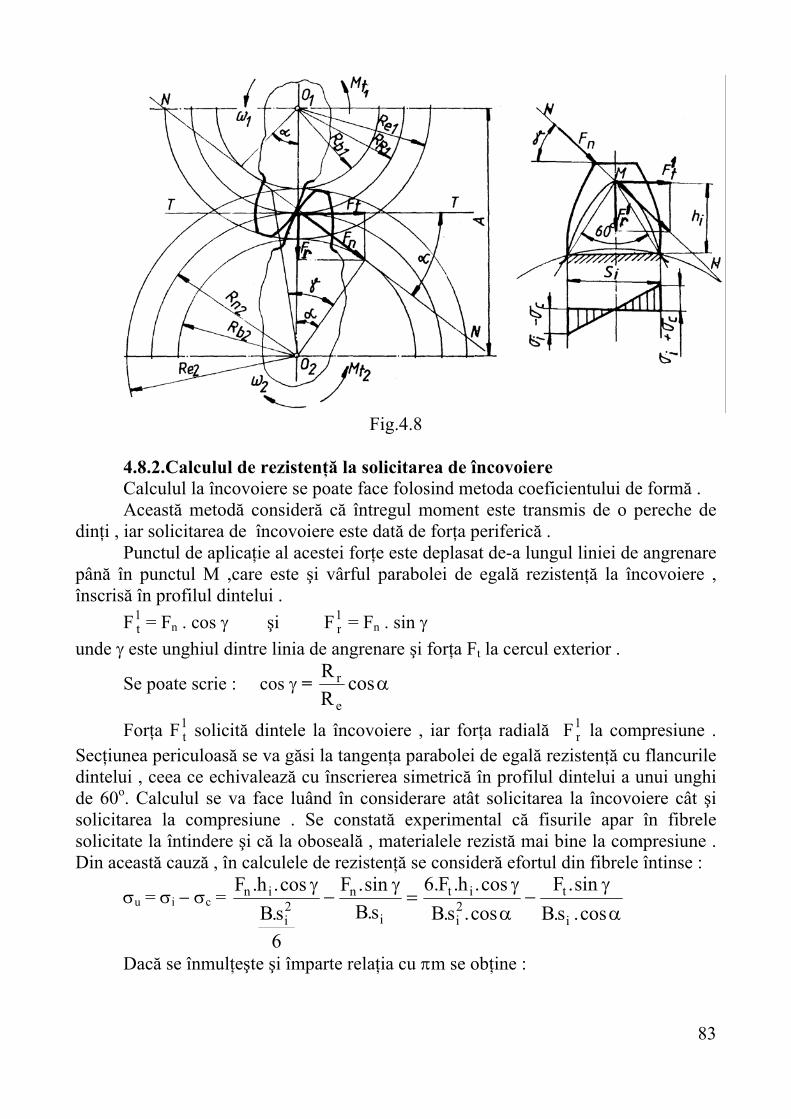
83
Fig.4.8
4.8.2.Calculul de rezistenţă la solicitarea de încovoiere Calculul la încovoiere se poate face folosind metoda coeficientului de formă . Această metodă consideră că întregul moment este transmis de o pereche de
dinţi , iar solicitarea de încovoiere este dată de forţa periferică . Punctul de aplicaţie al acestei forţe este deplasat de-a lungul liniei de angrenare
până în punctul M ,care este şi vârful parabolei de egală rezistenţă la încovoiere , înscrisă în profilul dintelui .
F1t = Fn . cos γ şi F1
r = Fn . sin γ unde γ este unghiul dintre linia de angrenare şi forţa Ft la cercul exterior .
Se poate scrie : cos γ = αcosRR
e
r
Forţa F1t solicită dintele la încovoiere , iar forţa radială F1
r la compresiune . Secţiunea periculoasă se va găsi la tangenţa parabolei de egală rezistenţă cu flancurile dintelui , ceea ce echivalează cu înscrierea simetrică în profilul dintelui a unui unghi de 60o. Calculul se va face luând în considerare atât solicitarea la încovoiere cât şi solicitarea la compresiune . Se constată experimental că fisurile apar în fibrele solicitate la întindere şi că la oboseală , materialele rezistă mai bine la compresiune . Din această cauză , în calculele de rezistenţă se consideră efortul din fibrele întinse :
σu = σi − σc = αγ
−αγ
=γ
−γ
cos.s.Bsin.F
cos.s.Bcos.h.F.6
s.Bsin.F
6s.Bcos.h.F
i
t2i
it
i
n2i
in
Dacă se înmulţeşte şi împarte relaţia cu πm se obţine :

84
σu = απ
=⎟⎟⎠
⎞⎜⎜⎝
⎛ γπ−
γπγπ cos.y.B.m.
Fssin.m.
scos.h.m..6
cos.B.m.F t
i2i
it
unde : y =
i2i
i
ssin.m.
scos.h.m..6
1γπ
−γπ
şi se numeşte coeficient de
formă .Valorile lui y se dau în literatura de specialitate în funcţie de numărul de dinţi z şi coeficientul de deplasare ξ. Datorită erorilor de execuţie a angrenajelor ( abateri ale pasului de bază , abateri ale profilului , excentritatea danturii ) , a erorilor de montare şi vitezei de rotaţie , în timpul angrenării apar forţe dinamice , care se iau în
consideraţie prin coeficientul dinamic : Kd = 1+ vc
unde : c = 3 ÷ 12 este un coeficient dependent de calitatea prelucrării ; v – viteza roţii . Datorită faptului că gradul de acoperire ε > 1,1 , în condiţii normale de funcţionare ,forţa de transmis se repartizează pe doi dinţi . Pentru a lua în consideraţie acest lucru se introduce coeficientul gradului de acoperire :
Kε = ε÷ )9,065,0(
1
Relaţia forţei periferice de calcul devine :
Ftc = kd.kε. Ft = .z.m
M.2 t kd.kε = π.m.y.B.σu.cos α
Luând B = Ψ.m, în care Ψ = 10 ÷80 este coeficientul de lăţime a roţii sau de lungime a dintelui şi cos α = cos 20o = 0,94 rezultă valoarea lui m :
m = 3u
tdt
z...yk.k.M.68,0
σψ
Pentru m dat rezultă σu , care se compară cu tensiunea admisibilă .
4.8.3.Calculul la uzură Calculul la uzură al flancurilor dinţilor se face plecând de la constatarea experimentală că o creştere a eforturilor unitare pe suprafaţa de contact , peste limita admisă , provoacă uzura rapidă a acestor suprafeţe . Uzura de tip pitting (ciupirea) este principala cauză care determină ieşirea din funcţionare a angrenajelor cu duritaţi mici şi mijlocii (HB<350). Calculul la uzură se va reduce la satisfacerea condiţiei , ca eforturile unitare în zona cercurilor de rostogolire , unde începe de obicei uzura prin ciupituri , să nu depăşească tensiunea admisibila de contact . În calculul la uzură se porneşte de la relaţia lui Hertz , care dă tensiunea maximă de contact de-a lungul generatoarei a doi cilindri în contact .
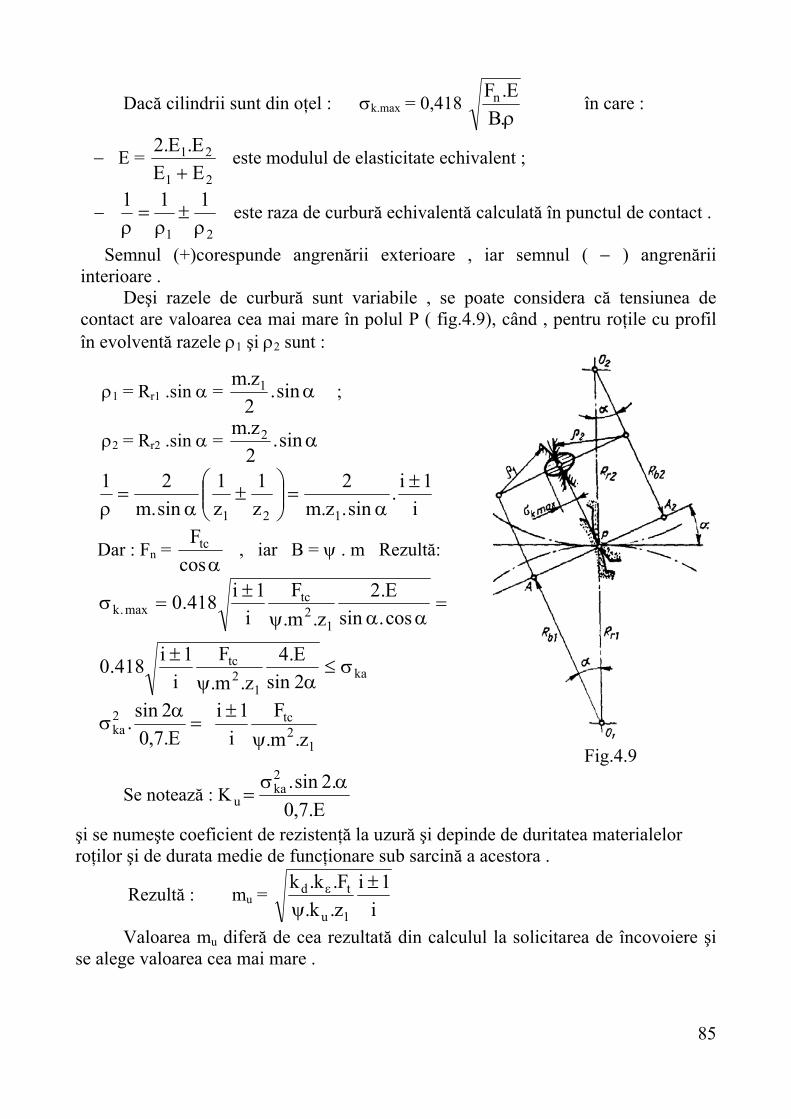
85
Dacă cilindrii sunt din oţel : σk.max = 0,418 ρ.BE.Fn în care :
− E = 21
21
EEE.E.2
+ este modulul de elasticitate echivalent ;
− 21
111ρ
±ρ
=ρ
este raza de curbură echivalentă calculată în punctul de contact .
Semnul (+)corespunde angrenării exterioare , iar semnul ( − ) angrenării interioare . Deşi razele de curbură sunt variabile , se poate considera că tensiunea de contact are valoarea cea mai mare în polul P ( fig.4.9), când , pentru roţile cu profil în evolventă razele ρ1 şi ρ2 sunt :
Fig.4.9
Se notează : KE.7,0
.2sin.2ka
uασ
=
şi se numeşte coeficient de rezistenţă la uzură şi depinde de duritatea materialelor roţilor şi de durata medie de funcţionare sub sarcină a acestora .
Rezultă : mu = i
1iz.k.F.k.k
1u
td ±ψ
ε
Valoarea mu diferă de cea rezultată din calculul la solicitarea de încovoiere şi se alege valoarea cea mai mare .
ρ1 = Rr1 .sin α = αsin.2z.m 1 ;
ρ2 = Rr2 .sin α = αsin.2z.m 2
i1i.
sin.z.m2
z1
z1
sin.m21
121
±α
=⎟⎟⎠
⎞⎜⎜⎝
⎛±
α=
ρ
Dar : Fn = αcos
Ftc , iar B = ψ . m Rezultă:
ka1
2tc
12
tcmax.k
2sinE.4
z.m.F
i1i418.0
cos.sinE.2
z.m.F
i1i418.0
σ≤αψ
±
=ααψ
±=σ
=α
σE.7,0
2sin.2ka
12
tc
z.m.F
i1iψ
±
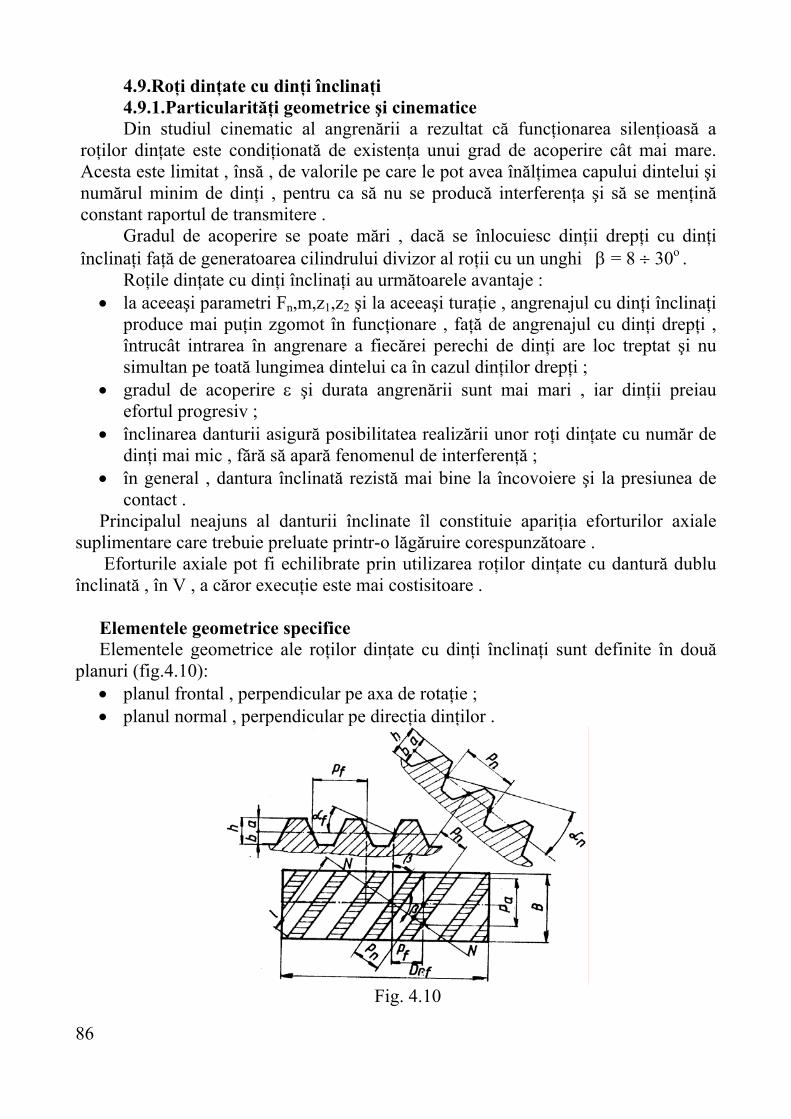
86
4.9.Roţi dinţate cu dinţi înclinaţi 4.9.1.Particularităţi geometrice şi cinematice
Din studiul cinematic al angrenării a rezultat că funcţionarea silenţioasă a roţilor dinţate este condiţionată de existenţa unui grad de acoperire cât mai mare. Acesta este limitat , însă , de valorile pe care le pot avea înălţimea capului dintelui şi numărul minim de dinţi , pentru ca să nu se producă interferenţa şi să se menţină constant raportul de transmitere .
Gradul de acoperire se poate mări , dacă se înlocuiesc dinţii drepţi cu dinţi înclinaţi faţă de generatoarea cilindrului divizor al roţii cu un unghi β = 8 ÷ 30o . Roţile dinţate cu dinţi înclinaţi au următoarele avantaje : • la aceeaşi parametri Fn,m,z1,z2 şi la aceeaşi turaţie , angrenajul cu dinţi înclinaţi
produce mai puţin zgomot în funcţionare , faţă de angrenajul cu dinţi drepţi , întrucât intrarea în angrenare a fiecărei perechi de dinţi are loc treptat şi nu simultan pe toată lungimea dintelui ca în cazul dinţilor drepţi ;
• gradul de acoperire ε şi durata angrenării sunt mai mari , iar dinţii preiau efortul progresiv ;
• înclinarea danturii asigură posibilitatea realizării unor roţi dinţate cu număr de dinţi mai mic , fără să apară fenomenul de interferenţă ;
• în general , dantura înclinată rezistă mai bine la încovoiere şi la presiunea de contact .
Principalul neajuns al danturii înclinate îl constituie apariţia eforturilor axiale suplimentare care trebuie preluate printr-o lăgăruire corespunzătoare .
Eforturile axiale pot fi echilibrate prin utilizarea roţilor dinţate cu dantură dublu înclinată , în V , a căror execuţie este mai costisitoare .
Elementele geometrice specifice Elementele geometrice ale roţilor dinţate cu dinţi înclinaţi sunt definite în două
planuri (fig.4.10): • planul frontal , perpendicular pe axa de rotaţie ; • planul normal , perpendicular pe direcţia dinţilor .
Fig. 4.10

87
În planul frontal se stabilesc dimensiunile geometrice reale ale roţii dinţate , iar în planul normal se stabilesc elementele gometrice standardizate , aceleaşi ca la roţile dinţate cu dinţi drepţi .
Pasul danturii înclinate se defineşte în trei plane : • pasul frontal sau aparent pn se obţine prin intersectarea roţii cu un plan
perpendicular pe axa cilindrului de divizare şi deci paralel cu planul frontal al roţii ;
• pasul normal pn se obţine prin intersectarea roţii cu un plan normal pe direcţia dinţilor ;
• pasul axial pa se obţine prin intersectarea roţii cu un plan care conţine axa roţii. Între cei trei paşi ai danturii se pot scrie relaţiile : pn = p = pf cos β = pn sin β Corespunzător celor trei paşi , se definesc trei module : mn = m = mf cos β = mn sin β Profilul standardizat al cremalierei apare în secţiunea normală pe direcţia
dinţilor , unde se va reproduce pasul normal pn şi unghiul de angrenare αn . Modulul danturii în plan normal este standardizat . Înălţimea dintelui h rămâne aceeaşi în ambele plane ca la dantura dreaptă . hon = hof = ho = ao + bo = 2,25.m
Lungimea efectivă a dintelui : l = βcos
B
Unghiul de angrenare în plan frontal se calculează cu relaţia : tg αf = β
αcostg n
Distanţa dintre axele de rotaţie ale roţilor va fi :
A = Rr1 + Rr2 = β+
=+
cos.2)zz(m
2)zz(m 21n21f
Fig. 4.11
Gradul de acoperire ε este mai mare decât gradul de acoperire de la dantura dreaptă εo , datorită creşterii lungimii arcului de angrenare cu mărimea (fig. 4.11):
β= tg.Bee1 ⇒ ε = εo + εf = εo + fp
tg.B β
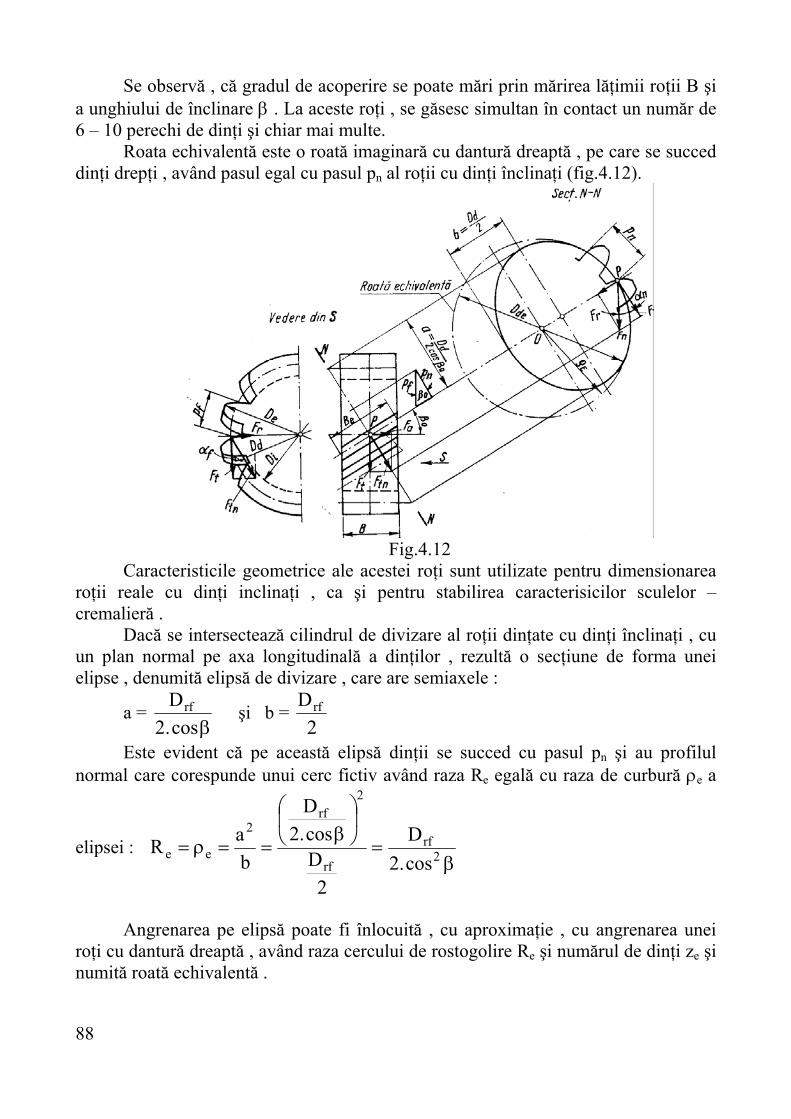
88
Se observă , că gradul de acoperire se poate mări prin mărirea lăţimii roţii B şi a unghiului de înclinare β . La aceste roţi , se găsesc simultan în contact un număr de 6 – 10 perechi de dinţi şi chiar mai multe.
Roata echivalentă este o roată imaginară cu dantură dreaptă , pe care se succed dinţi drepţi , având pasul egal cu pasul pn al roţii cu dinţi înclinaţi (fig.4.12).
Fig.4.12
Caracteristicile geometrice ale acestei roţi sunt utilizate pentru dimensionarea roţii reale cu dinţi inclinaţi , ca şi pentru stabilirea caracterisicilor sculelor – cremalieră .
Dacă se intersectează cilindrul de divizare al roţii dinţate cu dinţi înclinaţi , cu un plan normal pe axa longitudinală a dinţilor , rezultă o secţiune de forma unei elipse , denumită elipsă de divizare , care are semiaxele :
a = βcos.2
Drf şi b = 2
Drf
Este evident că pe această elipsă dinţii se succed cu pasul pn şi au profilul normal care corespunde unui cerc fictiv având raza Re egală cu raza de curbură ρe a
elipsei : β
=⎟⎠
⎞⎜⎝
⎛β
==ρ= 2rf
rf
2rf
2
ee cos.2D
2Dcos.2D
baR
Angrenarea pe elipsă poate fi înlocuită , cu aproximaţie , cu angrenarea unei
roţi cu dantură dreaptă , având raza cercului de rostogolire Re şi numărul de dinţi ze şi numită roată echivalentă .

89
Dar : Re = 2m.z ne şi Drf =
βcosz.mn ⇒ ze =
β3cosz
Deplasarea danturii înclinate . Elementele referitoare la deplasarea danturii înclinate sunt valabile şi pentru
dantura dreaptă . Numai că la dantura înclinată , deplasarea sculei se desfăşoară în planul normal pe axa dinţilor , cu menţiunea că mărimea deplasării x faţă de linia de referinţă a cremalierei TT , în raport cu polul angrenării , este multiplu al modului normal :
x = ± mn.ξn = ± mf . ξf ⇒ ξf = ξn .f
n
mm
= ξn .cos β
unde ξn şi ξf sunt deplasările specifice în plan normal şi în plan frontal . Elementele geometrice şi cinematice ale angrenajului cilindric cu dantură
înclinată se calculează cu relaţiile de la angrenajul cilindric cu dinţi drepţi . 4.9.2.Forţele şi calculul de rezistenţă al angrenajelor cilindrice cu dinţi înclinaţi
Forţa normală pe flancul dintelui Fn se descompune în două componente : Ftn normală pe direcţia dinţilor şi Fr după direcţia radială . Pe de altă parte , forţa Ftn într-un plan orizontal se descompune tot în două componente :
Ft care este forţa periferică şi componenta axială Fa .
Dar : Ft = n
t
rf
t
mM.cos.2
DM.2 β
= unde: Drf = mf . z = βcosz.mn
Fa = Ft . tg β
Fn = βα
=α cos.cos
Fcos
F
n
t
n
tn
Fr = Ftn . tg αn = Ft . β
αcostg n
Calculul la încovoiere şi la uzură al roţilor cu dinţi înclinaţi se face , utilizând relaţiile de la roţile cu dinţi drepţi , adaptate la dantura înclinată .
Întrucât repartizarea sarcinii pe dinţi nu este cunoscută , se poate admite cu suficientă aproximaţie că lungimea de contact a liniiilor de contact dintre dinţii aflaţi în angrenare este egală cu lungimea Be a unui dinte :
Be = βcos
B
Forţa care solicită dintele la încovoiere este :
Ftn = βcos
Ft = mn . yn . Be . σa . cos αn
yn este coeficientul de formă al dintelui corespunzător numărului de dinţi al
roţii echivalente cu dinţi drepţi :
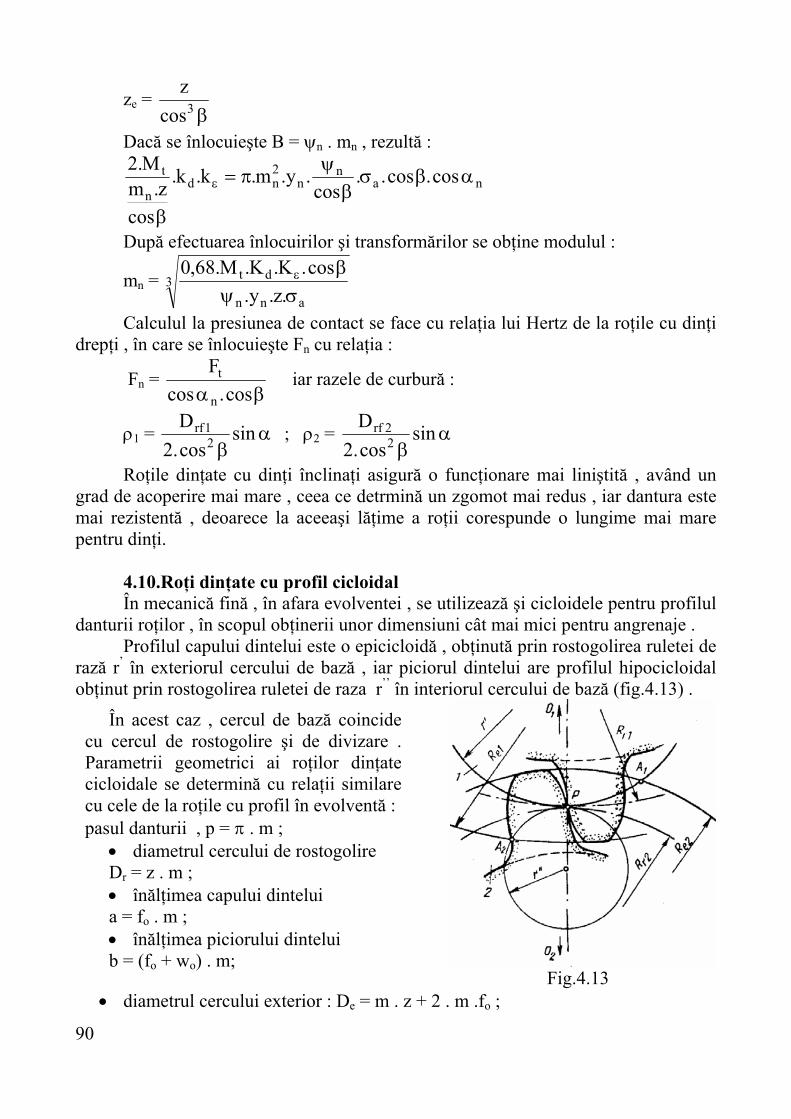
90
ze = β3cos
z
Dacă se înlocuieşte B = ψn . mn , rezultă :
nan
n2nd
n
t cos.cos..cos
.y.m.k.k.
cosz.m
M.2αβσ
βψ
π=
β
ε
După efectuarea înlocuirilor şi transformărilor se obţine modulul :
mn = 3ann
dt
.z.y.cos.K.K.M.68,0
σψβε
Calculul la presiunea de contact se face cu relaţia lui Hertz de la roţile cu dinţi drepţi , în care se înlocuieşte Fn cu relaţia :
Fn = βα cos.cos
F
n
t iar razele de curbură :
ρ1 = αβ
sincos.2D
21rf ; ρ2 = α
βsin
cos.2D
22rf
Roţile dinţate cu dinţi înclinaţi asigură o funcţionare mai liniştită , având un grad de acoperire mai mare , ceea ce detrmină un zgomot mai redus , iar dantura este mai rezistentă , deoarece la aceeaşi lăţime a roţii corespunde o lungime mai mare pentru dinţi.
4.10.Roţi dinţate cu profil cicloidal În mecanică fină , în afara evolventei , se utilizează şi cicloidele pentru profilul
danturii roţilor , în scopul obţinerii unor dimensiuni cât mai mici pentru angrenaje . Profilul capului dintelui este o epicicloidă , obţinută prin rostogolirea ruletei de
rază r’ în exteriorul cercului de bază , iar piciorul dintelui are profilul hipocicloidal obţinut prin rostogolirea ruletei de raza r’’ în interiorul cercului de bază (fig.4.13) .
Fig.4.13
• diametrul cercului exterior : De = m . z + 2 . m .fo ;
În acest caz , cercul de bază coincide cu cercul de rostogolire şi de divizare . Parametrii geometrici ai roţilor dinţate cicloidale se determină cu relaţii similare cu cele de la roţile cu profil în evolventă : pasul danturii , p = π . m ;
• diametrul cercului de rostogolire Dr = z . m ; • înălţimea capului dintelui a = fo . m ; • înălţimea piciorului dintelui b = (fo + wo) . m;
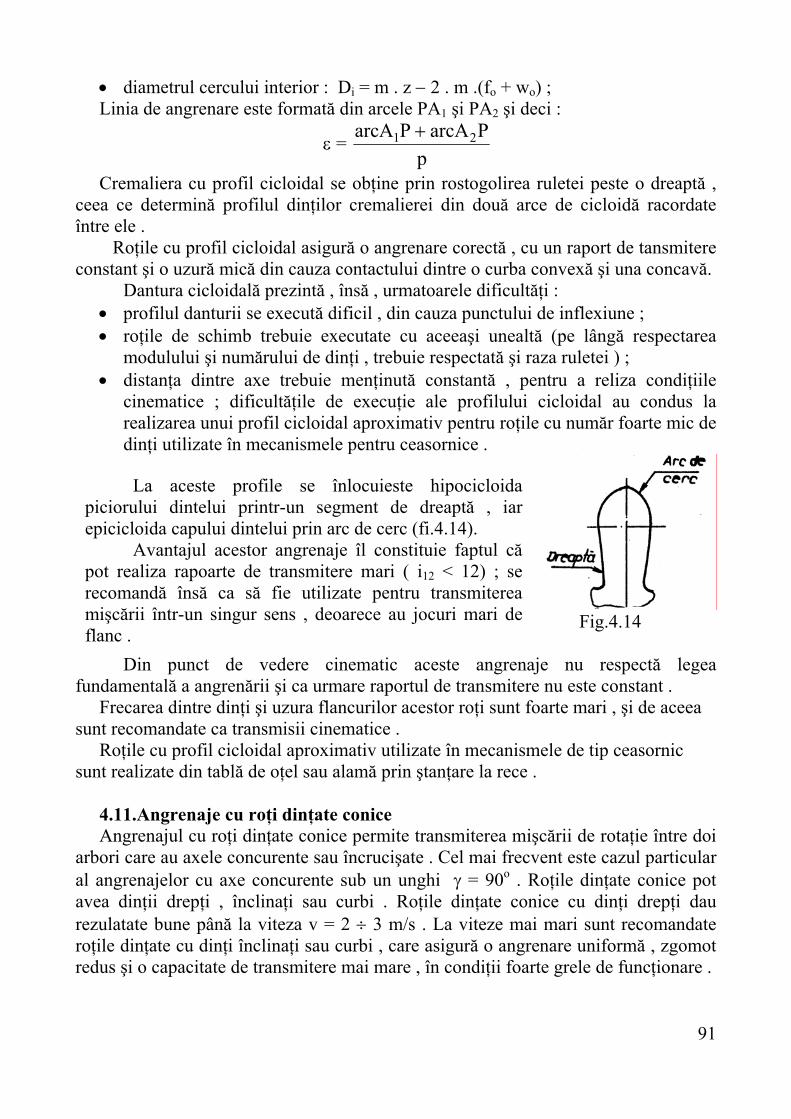
91
• diametrul cercului interior : Di = m . z − 2 . m .(fo + wo) ; Linia de angrenare este formată din arcele PA1 şi PA2 şi deci :
ε = p
ParcAParcA 21 +
Cremaliera cu profil cicloidal se obţine prin rostogolirea ruletei peste o dreaptă , ceea ce determină profilul dinţilor cremalierei din două arce de cicloidă racordate între ele . Roţile cu profil cicloidal asigură o angrenare corectă , cu un raport de tansmitere constant şi o uzură mică din cauza contactului dintre o curba convexă şi una concavă.
Dantura cicloidală prezintă , însă , urmatoarele dificultăţi : • profilul danturii se execută dificil , din cauza punctului de inflexiune ; • roţile de schimb trebuie executate cu aceeaşi unealtă (pe lângă respectarea
modulului şi numărului de dinţi , trebuie respectată şi raza ruletei ) ; • distanţa dintre axe trebuie menţinută constantă , pentru a reliza condiţiile
cinematice ; dificultăţile de execuţie ale profilului cicloidal au condus la realizarea unui profil cicloidal aproximativ pentru roţile cu număr foarte mic de dinţi utilizate în mecanismele pentru ceasornice .
Fig.4.14
Din punct de vedere cinematic aceste angrenaje nu respectă legea
fundamentală a angrenării şi ca urmare raportul de transmitere nu este constant . Frecarea dintre dinţi şi uzura flancurilor acestor roţi sunt foarte mari , şi de aceea
sunt recomandate ca transmisii cinematice . Roţile cu profil cicloidal aproximativ utilizate în mecanismele de tip ceasornic
sunt realizate din tablă de oţel sau alamă prin ştanţare la rece . 4.11.Angrenaje cu roţi dinţate conice Angrenajul cu roţi dinţate conice permite transmiterea mişcării de rotaţie între doi
arbori care au axele concurente sau încrucişate . Cel mai frecvent este cazul particular al angrenajelor cu axe concurente sub un unghi γ = 90o . Roţile dinţate conice pot avea dinţii drepţi , înclinaţi sau curbi . Roţile dinţate conice cu dinţi drepţi dau rezulatate bune până la viteza v = 2 ÷ 3 m/s . La viteze mai mari sunt recomandate roţile dinţate cu dinţi înclinaţi sau curbi , care asigură o angrenare uniformă , zgomot redus şi o capacitate de transmitere mai mare , în condiţii foarte grele de funcţionare .
La aceste profile se înlocuieste hipocicloida piciorului dintelui printr-un segment de dreaptă , iar epicicloida capului dintelui prin arc de cerc (fi.4.14).
Avantajul acestor angrenaje îl constituie faptul că pot realiza rapoarte de transmitere mari ( i12 < 12) ; se recomandă însă ca să fie utilizate pentru transmiterea mişcării într-un singur sens , deoarece au jocuri mari de flanc .
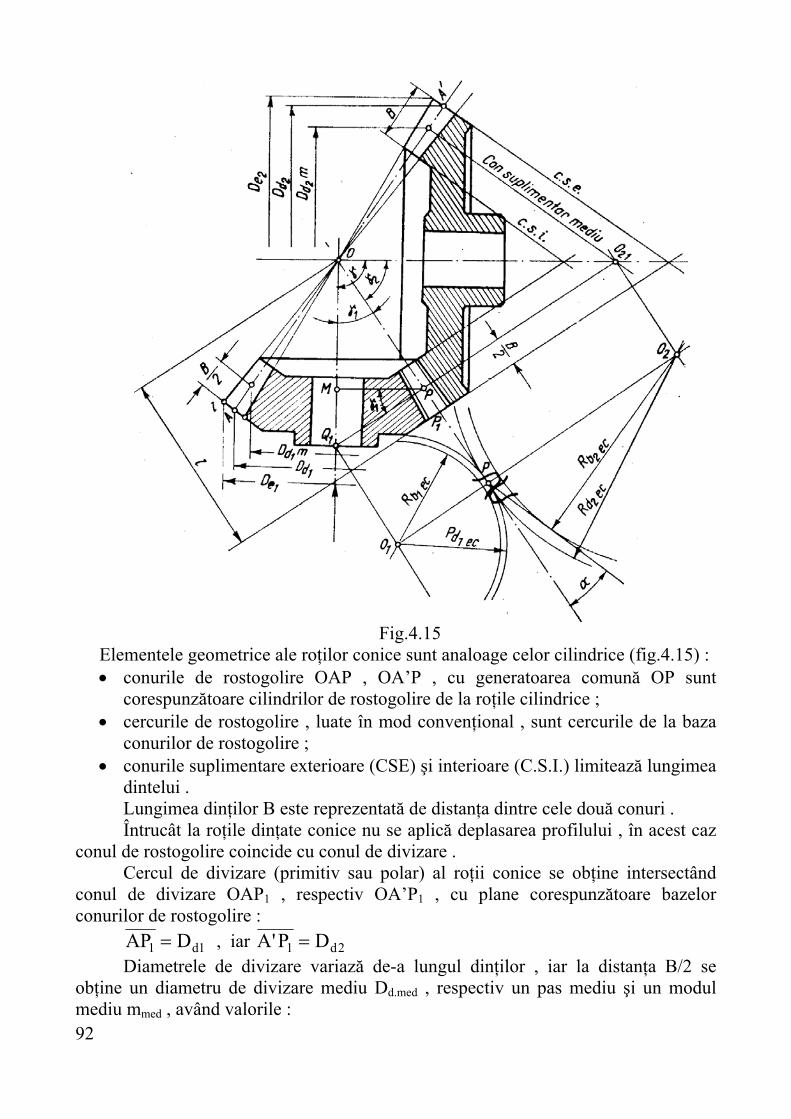
92
Fig.4.15
Elementele geometrice ale roţilor conice sunt analoage celor cilindrice (fig.4.15) : • conurile de rostogolire OAP , OA’P , cu generatoarea comună OP sunt
corespunzătoare cilindrilor de rostogolire de la roţile cilindrice ; • cercurile de rostogolire , luate în mod convenţional , sunt cercurile de la baza
conurilor de rostogolire ; • conurile suplimentare exterioare (CSE) şi interioare (C.S.I.) limitează lungimea
dintelui . Lungimea dinţilor B este reprezentată de distanţa dintre cele două conuri . Întrucât la roţile dinţate conice nu se aplică deplasarea profilului , în acest caz
conul de rostogolire coincide cu conul de divizare . Cercul de divizare (primitiv sau polar) al roţii conice se obţine intersectând
conul de divizare OAP1 , respectiv OA’P1 , cu plane corespunzătoare bazelor conurilor de rostogolire :
1d1 DAP = , iar 2d1 DP'A = Diametrele de divizare variază de-a lungul dinţilor , iar la distanţa B/2 se
obţine un diametru de divizare mediu Dd.med , respectiv un pas mediu şi un modul mediu mmed , având valorile :

93
Dd.med = 2(1−0,5.B).sin γ1 ; mmed = z
Ddmed
Roata echivalentă Determinarea profilului dinţilor , în cazul când γ = 90o , se face pe baza
numărului de dinţi ze al roţii echivalente care se obţine prin desfăşurarea conului suplimentar mediu pe un plan şi este caracterizată prin diametrul de divizare echivalent :
D1e = 2.1
med.1d
11 cos
R.2cosMP.2PO
γ=
γ= ⇒ Dd1.e =
1
med.1d
cosD
γ sau :
z1e mmed = 1
med1
cosm.zγ
⇒ z1e = 1
1
coszγ
z2e = 2
2
coszγ
4.10.1.Forţele şi calculul de rezistenţă al roţilor dinţate conice La angrenajele conice se poate admite că forţa tangenţială este aplicată la
cercul de rostogolire , de rază medie , în P (fig.4.16) :
Fig.4.16
Ft = rm
t
DM.2
; 'rF = Ft . tg αn ;
Fra1 = 'rF sin γ1 = Ft . tg αn . sin γ1
Frr1 = 'rF cos γ1 = Ft . tg αn . cos γ1
Componenta axială produce eforturi axiale în arbori şi trebuie preluată de lagăre axiale . A doua componentă solicită dintele la compresiune şi arborele la încovoiere.
αn

94
Deoarece pasul şi modulul variază de-a lungul dintelui , calculul de rezistenţă se poate face , considerând că efortul se repartizează uniform pe lungimea dintelui , iar forţa periferică este aplicată la mijlocul lungimii dintelui . Roata conică poate fi asimilată cu o roată cilindrică cu dinţi drepţi , având urmatoarele caracteristici :
• diametrul cercului de rostogolire egal cu diametrul cercului de rostogolire al roţii conice în secţiunea medie a dintelui ;
• modulul corespunzător modulului roţii conice în aceeaşi secţiune ; • profilul dinţilor corespunzător profilului dinţilor roţii echivalente .
Pe baza acestor caracteristici , prin analogie cu relaţiile de rezistenţă stabilite pentru roţile cilindrice , se poate efectua calculul de rezistenţă la încovoiere şi la presiunea de contact .
La încovoiere : mm = 3amm
dmt
.z.y.K.K.M.68,0
σψε
4.12.Angrenaje melcate Angrenajele melcate sunt angrenaje elicoidale , care servesc la transmiterea
mişcării de rotaţie între doi arbori ale căror axe nu se intersectează în spaţiu . De regulă , unghiul dintre axe ,δ ,este egal cu 90o. Ele se compun dintr-un şurub cu filet trapezoidal numit melc , care angrenează
cu roata dinţată melcată , având dinţii înclinaţi sub acelaşi unghi ca spira filetului (fig.4.17).
Fig.4.17 Fig.4.18 La exterior dinţii roţii melcate nu au formă cilindrică , ci forma unui arc de
cerc ce se înfăşoară parţial pe melc . Dacă şi şurubul melc înfăşoară parţial roata melcată , angrenajul se numeşte globoidal (fig.4.18).
4.12.1.Elemente geometrice şi cinematice Într-o secţiune axială a şurubului cu un plan perpendicular pe axa roţii , şurubul
se prezintă ca o cremalieră cu dinţi drepţi , de obicei trapezoidali (fig.4.19), iar roata are dinţii elicoidali cu profil în evolventă .
Elementele geometrice se determină pe baza elementelor geometrice ale melcului de referinţă standardizat . Pasul elicei şurubului melcat se determină în funcţie de pasul axial pa şi numărul de începuturi ale melcului zs :
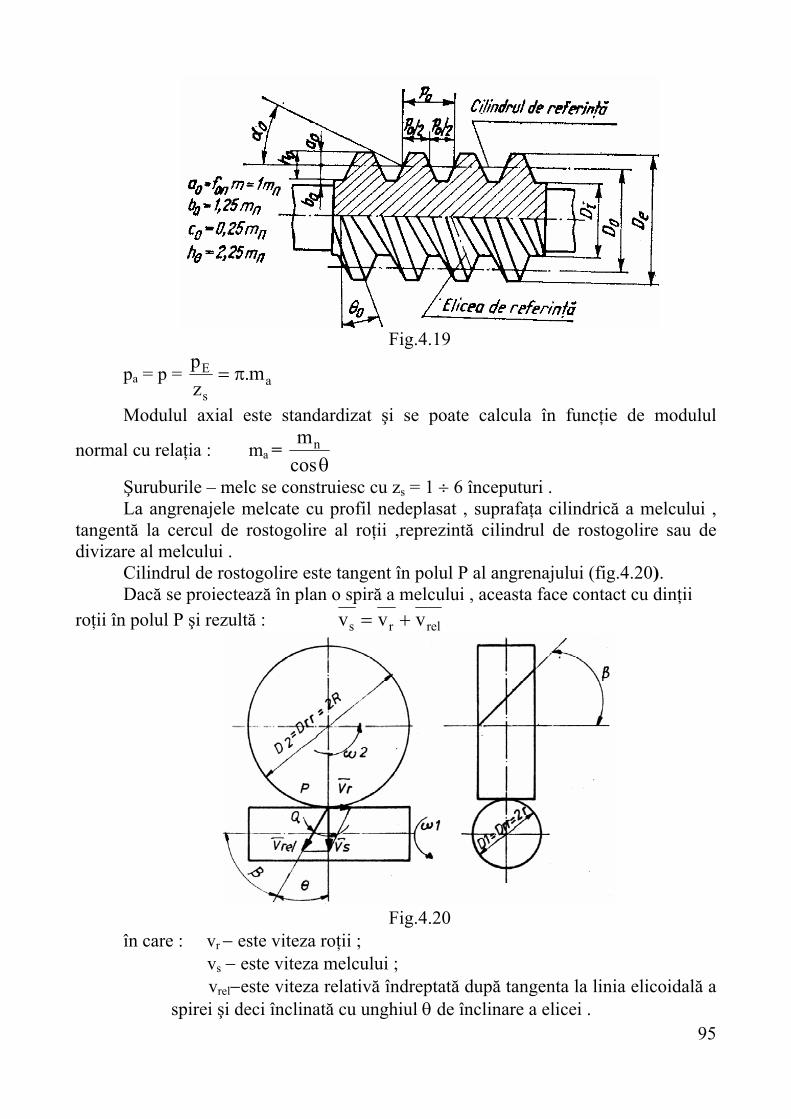
95
Fig.4.19
pa = p = as
E m.zp
π=
Modulul axial este standardizat şi se poate calcula în funcţie de modulul
normal cu relaţia : ma = θcos
mn
Şuruburile – melc se construiesc cu zs = 1 ÷ 6 începuturi . La angrenajele melcate cu profil nedeplasat , suprafaţa cilindrică a melcului ,
tangentă la cercul de rostogolire al roţii ,reprezintă cilindrul de rostogolire sau de divizare al melcului .
Cilindrul de rostogolire este tangent în polul P al angrenajului (fig.4.20). Dacă se proiectează în plan o spiră a melcului , aceasta face contact cu dinţii
roţii în polul P şi rezultă : relrs vvv +=
Fig.4.20
în care : vr − este viteza roţii ; vs − este viteza melcului ;
vrel−este viteza relativă îndreptată după tangenta la linia elicoidală a spirei şi deci înclinată cu unghiul θ de înclinare a elicei .
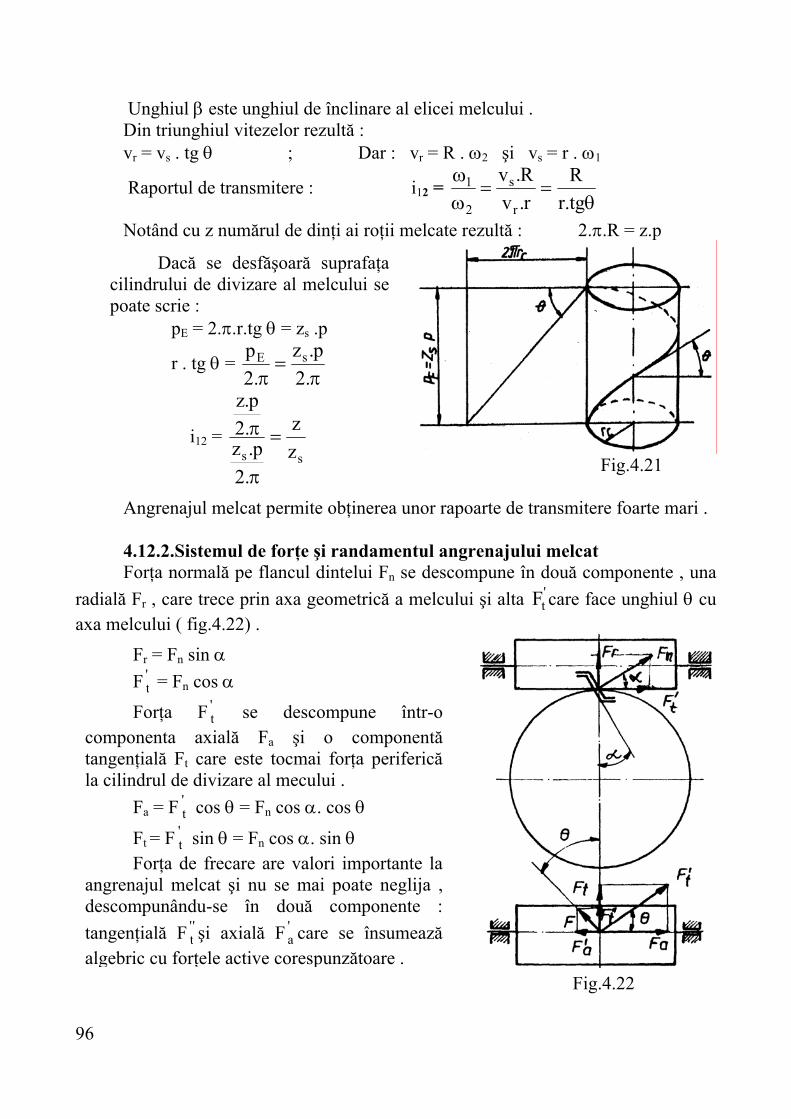
96
Unghiul β este unghiul de înclinare al elicei melcului . Din triunghiul vitezelor rezultă : vr = vs . tg θ ; Dar : vr = R . ω2 şi vs = r . ω1
Raportul de transmitere : i12 = θ
==ωω
tg.rR
r.vR.v
r
s
2
1
Notând cu z numărul de dinţi ai roţii melcate rezultă : 2.π.R = z.p
Fig.4.21
Angrenajul melcat permite obţinerea unor rapoarte de transmitere foarte mari . 4.12.2.Sistemul de forţe şi randamentul angrenajului melcat
Forţa normală pe flancul dintelui Fn se descompune în două componente , una radială Fr , care trece prin axa geometrică a melcului şi alta '
tF care face unghiul θ cu axa melcului ( fig.4.22) .
Fig.4.22
Dacă se desfăşoară suprafaţa cilindrului de divizare al melcului se poate scrie :
pE = 2.π.r.tg θ = zs .p
r . tg θ = π
=π .2
p.z.2
p sE
i12 = ss z
z
.2p.z
.2p.z
=
π
π
Fr = Fn sin α F '
t = Fn cos α
Forţa F 't se descompune într-o
componenta axială Fa şi o componentă tangenţială Ft care este tocmai forţa periferică la cilindrul de divizare al mecului .
Fa = F 't cos θ = Fn cos α. cos θ
Ft = F 't sin θ = Fn cos α. sin θ
Forţa de frecare are valori importante la angrenajul melcat şi nu se mai poate neglija , descompunându-se în două componente : tangenţială F ''
t şi axială F 'a care se însumează
algebric cu forţele active corespunzătoare .
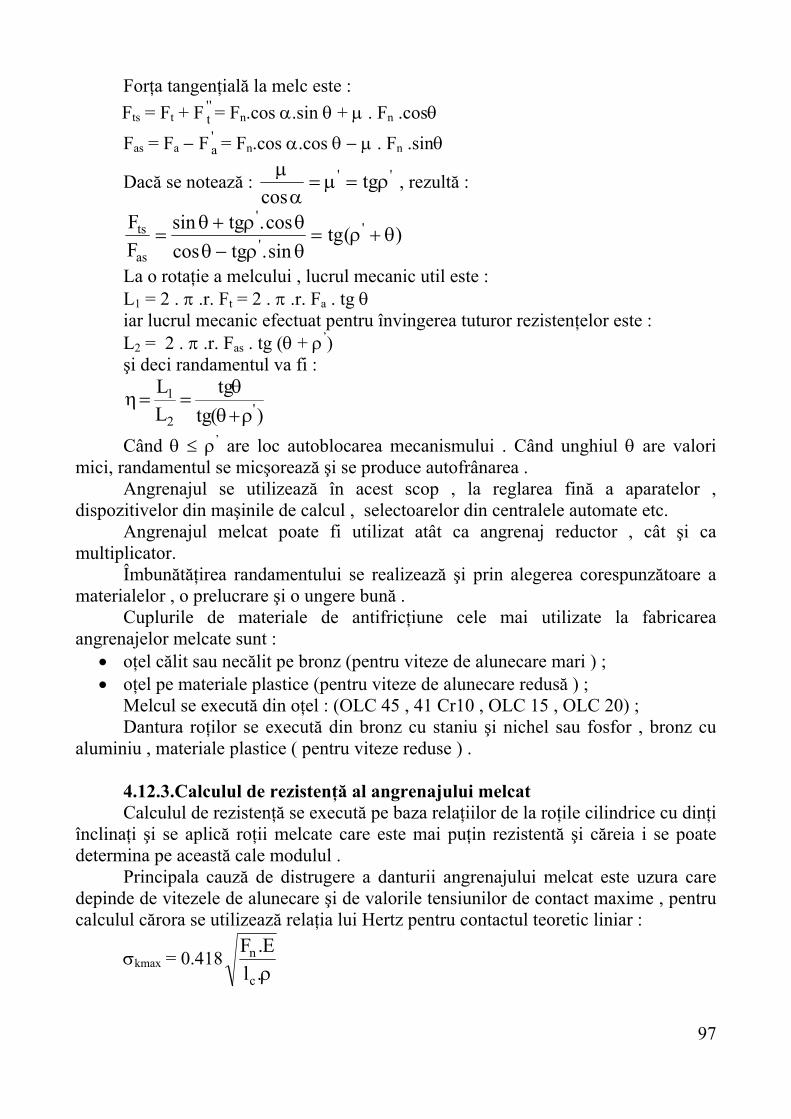
97
Forţa tangenţială la melc este : Fts = Ft + F ''
t = Fn.cos α.sin θ + µ . Fn .cosθ
Fas = Fa − F 'a = Fn.cos α.cos θ − µ . Fn .sinθ
Dacă se notează : '' tgcos
ρ=µ=α
µ , rezultă :
)(tgsin.tgcoscos.tgsin
FF '
'
'
as
ts θ+ρ=θρ−θθρ+θ
=
La o rotaţie a melcului , lucrul mecanic util este : L1 = 2 . π .r. Ft = 2 . π .r. Fa . tg θ iar lucrul mecanic efectuat pentru învingerea tuturor rezistenţelor este : L2 = 2 . π .r. Fas . tg (θ + ρ’)
şi deci randamentul va fi :
)(tgtg
LL
'2
1
ρ+θθ
==η
Când θ ≤ ρ’ are loc autoblocarea mecanismului . Când unghiul θ are valori mici, randamentul se micşorează şi se produce autofrânarea .
Angrenajul se utilizează în acest scop , la reglarea fină a aparatelor , dispozitivelor din maşinile de calcul , selectoarelor din centralele automate etc. Angrenajul melcat poate fi utilizat atât ca angrenaj reductor , cât şi ca multiplicator. Îmbunătăţirea randamentului se realizează şi prin alegerea corespunzătoare a materialelor , o prelucrare şi o ungere bună . Cuplurile de materiale de antifricţiune cele mai utilizate la fabricarea angrenajelor melcate sunt :
• oţel călit sau necălit pe bronz (pentru viteze de alunecare mari ) ; • oţel pe materiale plastice (pentru viteze de alunecare redusă ) ;
Melcul se execută din oţel : (OLC 45 , 41 Cr10 , OLC 15 , OLC 20) ; Dantura roţilor se execută din bronz cu staniu şi nichel sau fosfor , bronz cu
aluminiu , materiale plastice ( pentru viteze reduse ) . 4.12.3.Calculul de rezistenţă al angrenajului melcat Calculul de rezistenţă se execută pe baza relaţiilor de la roţile cilindrice cu dinţi
înclinaţi şi se aplică roţii melcate care este mai puţin rezistentă şi căreia i se poate determina pe această cale modulul .
Principala cauză de distrugere a danturii angrenajului melcat este uzura care depinde de vitezele de alunecare şi de valorile tensiunilor de contact maxime , pentru calculul cărora se utilizează relaţia lui Hertz pentru contactul teoretic liniar :
σkmax = 0.418ρ.lE.F
c
n

98
Forţa normală Fn pe flancul dintelui se va determina în raport cu forţa tangenţială care este forţa axială în melc :
Fig.4.23
4.13.1.Angrenaje speciale Concomitent cu perfecţionarea continuă a tipurilor clasice de angrenaje , în special a celor cu profil evolventic au fost realizate cercetări pentru găsirea unor noi variante sau tipuri noi de angrenaje , care să prezinte unele avantaje cinematice , tehnologice , respectiv o portanţă ridicată . Din categoria angrenajelor speciale fac parte :
• angrenajele minimale ; • angrenajele cilindro – conice ; • angrenajele toroidale ; • angrenajele cu profil în arc de cerc ( angrenaje de tip Novicov ) ; • angrenajele armonice . 4.13.1.Angrenaje minimale Angrenajele minimale sunt angrenaje evolventice cilindrice cu dinţi drepţi sau
înclinaţi la care piciorul are un număr foarte mic de dinţi (z1 = 1÷4 dinţi) , dar faţă de melc unghiul β are valori foarte mici ( fig.4.24)
Fig.4.24
Calculul geometric şi de rezistenţă se realizează în acelaşi mod ca la angrenajele cilindrice cu z1 ≥ 10÷12 dinţi .
Ftr = Fas = Fn . cos α . cos θ = rn
t
DM.2
; E = rs
rs
EEE.E.2
+
Lungimea de contact se calculează ţinând seama de particularităţile geometrice ale angrenajului
melcat şi rezultă : lc = 1,5 . θcos
Dsr
Raza de curbură echivalentă pentru profile se va lua egală cu raza profilului dintelui roţii , deoarece flancul dintelui melcului este drept şi are : ρs = ∞
Cu aceste angrenaje se pot obţine rapoarte de transmitere mari (i = 5÷100) , respectiv gabarite mici şi se utilizează în special în mecanică fină . Pentru a se asigura un grad de acoperire supraunitar se folosesc cremaliere de referinţă speciale , iar pentru a evita subtăierea , ascuţirea dintelui şi interferenţa , se recomandă deplasări pozitive mari , concomitent cu scurtarea capului dintelui pinionului .
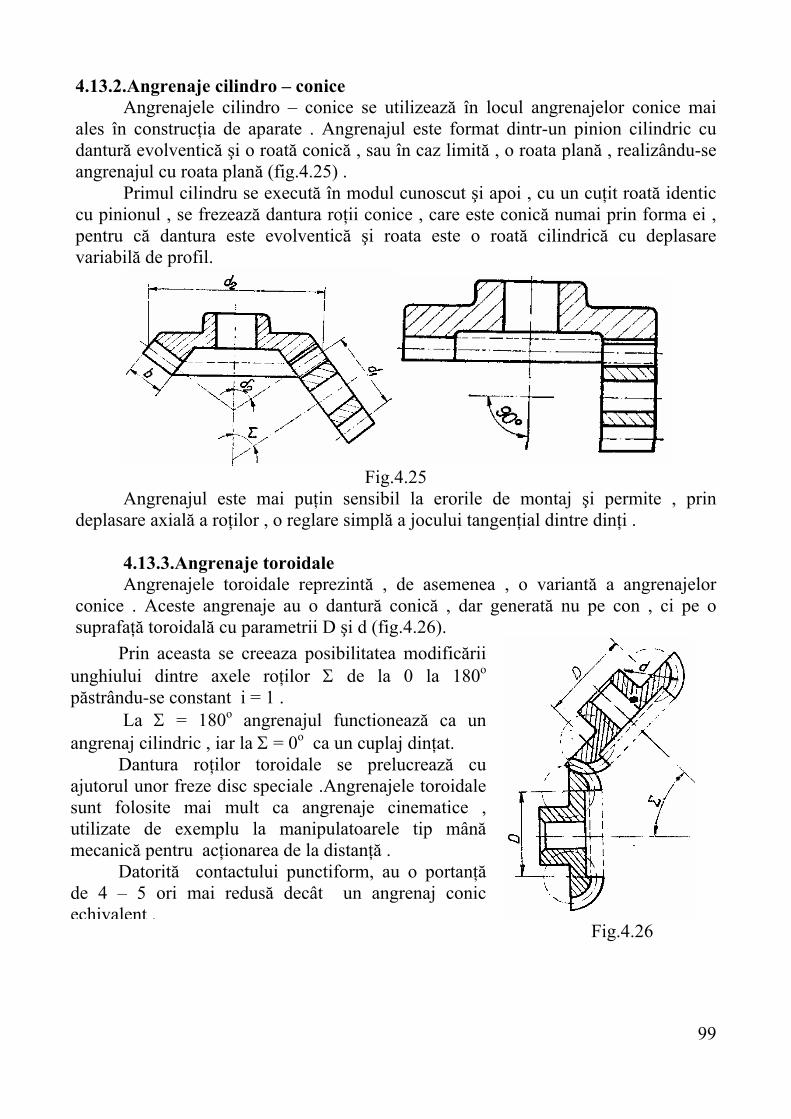
99
4.13.2.Angrenaje cilindro – conice Angrenajele cilindro – conice se utilizează în locul angrenajelor conice mai
ales în construcţia de aparate . Angrenajul este format dintr-un pinion cilindric cu dantură evolventică şi o roată conică , sau în caz limită , o roata plană , realizându-se angrenajul cu roata plană (fig.4.25) .
Primul cilindru se execută în modul cunoscut şi apoi , cu un cuţit roată identic cu pinionul , se frezează dantura roţii conice , care este conică numai prin forma ei , pentru că dantura este evolventică şi roata este o roată cilindrică cu deplasare variabilă de profil.
Fig.4.25
Angrenajul este mai puţin sensibil la erorile de montaj şi permite , prin deplasare axială a roţilor , o reglare simplă a jocului tangenţial dintre dinţi .
4.13.3.Angrenaje toroidale Angrenajele toroidale reprezintă , de asemenea , o variantă a angrenajelor
conice . Aceste angrenaje au o dantură conică , dar generată nu pe con , ci pe o suprafaţă toroidală cu parametrii D şi d (fig.4.26).
Fig.4.26
Prin aceasta se creeaza posibilitatea modificării unghiului dintre axele roţilor Σ de la 0 la 180o păstrându-se constant i = 1 .
La Σ = 180o angrenajul functionează ca un angrenaj cilindric , iar la Σ = 0o ca un cuplaj dinţat.
Dantura roţilor toroidale se prelucrează cu ajutorul unor freze disc speciale .Angrenajele toroidale sunt folosite mai mult ca angrenaje cinematice , utilizate de exemplu la manipulatoarele tip mână mecanică pentru acţionarea de la distanţă .
Datorită contactului punctiform, au o portanţă de 4 – 5 ori mai redusă decât un angrenaj conic echivalent .
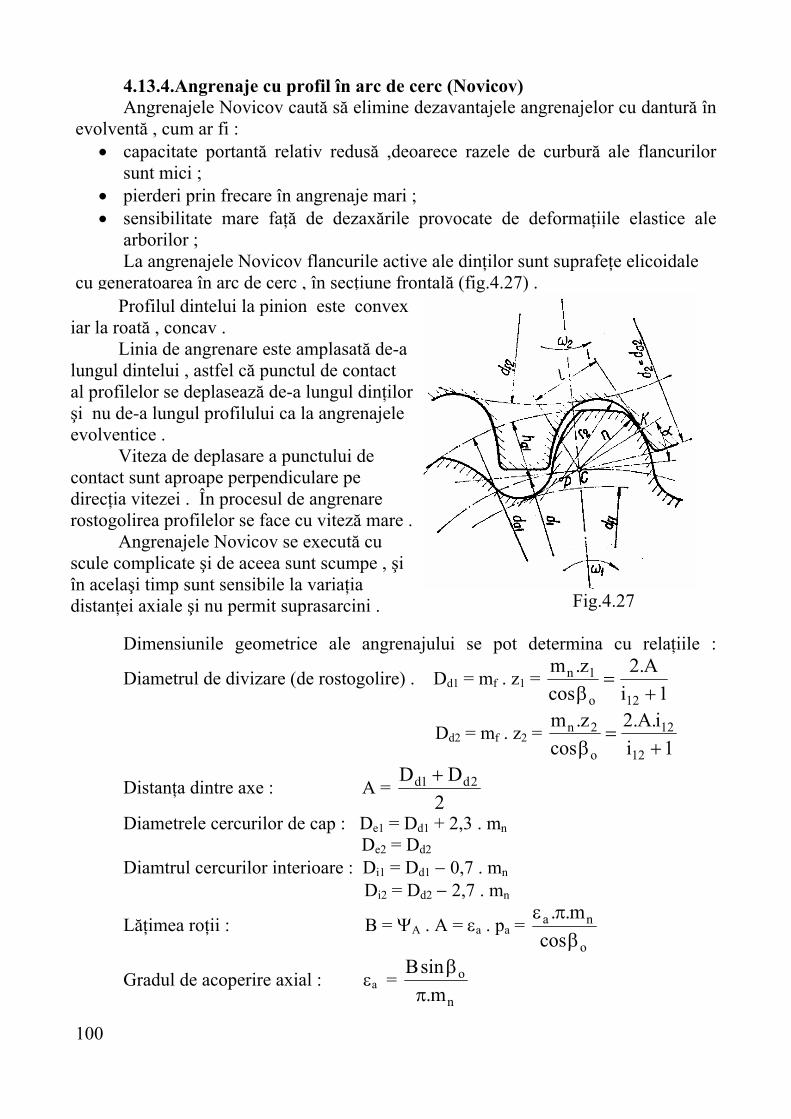
100
4.13.4.Angrenaje cu profil în arc de cerc (Novicov) Angrenajele Novicov caută să elimine dezavantajele angrenajelor cu dantură în
evolventă , cum ar fi : • capacitate portantă relativ redusă ,deoarece razele de curbură ale flancurilor
sunt mici ; • pierderi prin frecare în angrenaje mari ; • sensibilitate mare faţă de dezaxările provocate de deformaţiile elastice ale
arborilor ; La angrenajele Novicov flancurile active ale dinţilor sunt suprafeţe elicoidale
cu generatoarea în arc de cerc , în secţiune frontală (fig.4.27) .
Fig.4.27
Dimensiunile geometrice ale angrenajului se pot determina cu relaţiile :
Diametrul de divizare (de rostogolire) . Dd1 = mf . z1 = 1i
A.2cos
z.m
12o
1n
+=
β
Dd2 = mf . z2 = 1i
i.A.2cos
z.m
12
12
o
2n
+=
β
Distanţa dintre axe : A = 2
DD 2d1d +
Diametrele cercurilor de cap : De1 = Dd1 + 2,3 . mn
De2 = Dd2 Diamtrul cercurilor interioare : Di1 = Dd1 − 0,7 . mn
Di2 = Dd2 − 2,7 . mn
Lăţimea roţii : B = ΨA . A = εa . pa = o
na
cosm..β
πε
Gradul de acoperire axial : εa = n
o
m.sinBπ
β
Profilul dintelui la pinion este convex iar la roată , concav .
Linia de angrenare este amplasată de-a lungul dintelui , astfel că punctul de contact al profilelor se deplasează de-a lungul dinţilor şi nu de-a lungul profilului ca la angrenajele evolventice .
Viteza de deplasare a punctului de contact sunt aproape perpendiculare pe direcţia vitezei . În procesul de angrenare rostogolirea profilelor se face cu viteză mare .
Angrenajele Novicov se execută cu scule complicate şi de aceea sunt scumpe , şi în acelaşi timp sunt sensibile la variaţia distanţei axiale şi nu permit suprasarcini .
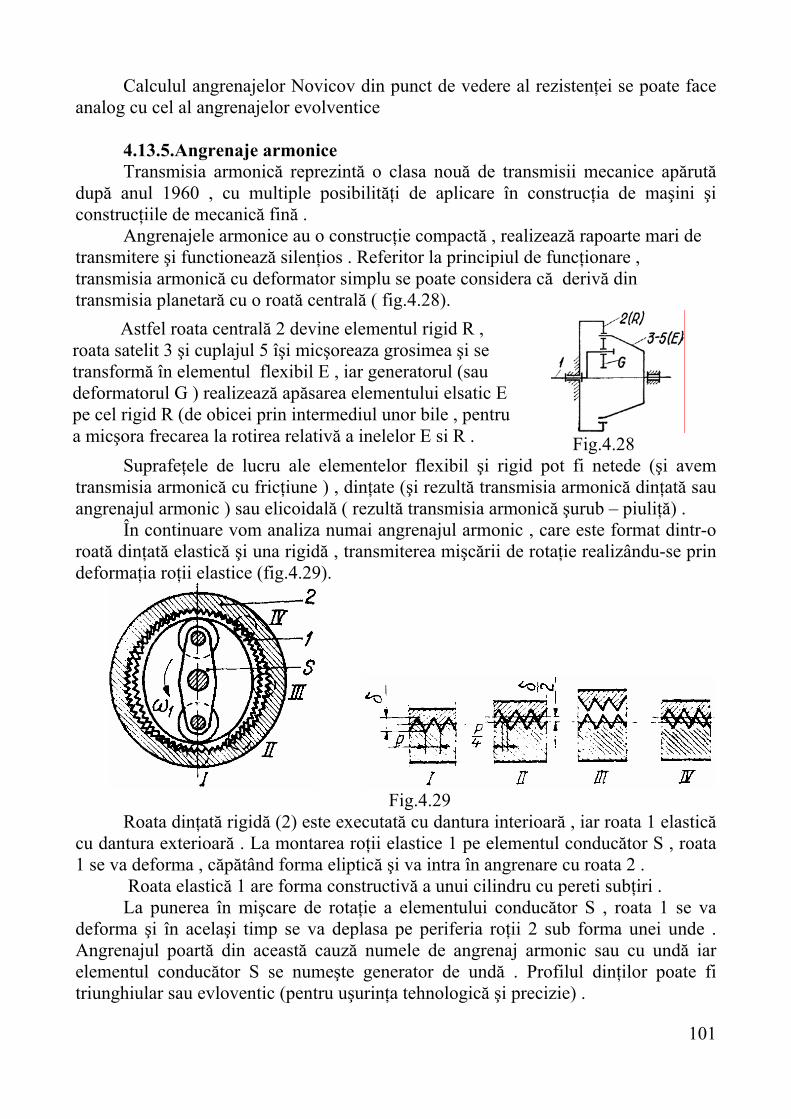
101
Calculul angrenajelor Novicov din punct de vedere al rezistenţei se poate face analog cu cel al angrenajelor evolventice
4.13.5.Angrenaje armonice Transmisia armonică reprezintă o clasa nouă de transmisii mecanice apărută
după anul 1960 , cu multiple posibilităţi de aplicare în construcţia de maşini şi construcţiile de mecanică fină .
Angrenajele armonice au o construcţie compactă , realizează rapoarte mari de transmitere şi functionează silenţios . Referitor la principiul de funcţionare , transmisia armonică cu deformator simplu se poate considera că derivă din transmisia planetară cu o roată centrală ( fig.4.28).
Fig.4.28
Suprafeţele de lucru ale elementelor flexibil şi rigid pot fi netede (şi avem transmisia armonică cu fricţiune ) , dinţate (şi rezultă transmisia armonică dinţată sau angrenajul armonic ) sau elicoidală ( rezultă transmisia armonică şurub – piuliţă) .
În continuare vom analiza numai angrenajul armonic , care este format dintr-o roată dinţată elastică şi una rigidă , transmiterea mişcării de rotaţie realizându-se prin deformaţia roţii elastice (fig.4.29).
Fig.4.29
Roata dinţată rigidă (2) este executată cu dantura interioară , iar roata 1 elastică cu dantura exterioară . La montarea roţii elastice 1 pe elementul conducător S , roata 1 se va deforma , căpătând forma eliptică şi va intra în angrenare cu roata 2 .
Roata elastică 1 are forma constructivă a unui cilindru cu pereti subţiri . La punerea în mişcare de rotaţie a elementului conducător S , roata 1 se va
deforma şi în acelaşi timp se va deplasa pe periferia roţii 2 sub forma unei unde . Angrenajul poartă din această cauză numele de angrenaj armonic sau cu undă iar elementul conducător S se numeşte generator de undă . Profilul dinţilor poate fi triunghiular sau evloventic (pentru uşurinţa tehnologică şi precizie) .
Astfel roata centrală 2 devine elementul rigid R , roata satelit 3 şi cuplajul 5 îşi micşoreaza grosimea şi se transformă în elementul flexibil E , iar generatorul (sau deformatorul G ) realizează apăsarea elementului elsatic E pe cel rigid R (de obicei prin intermediul unor bile , pentru a micşora frecarea la rotirea relativă a inelelor E si R .
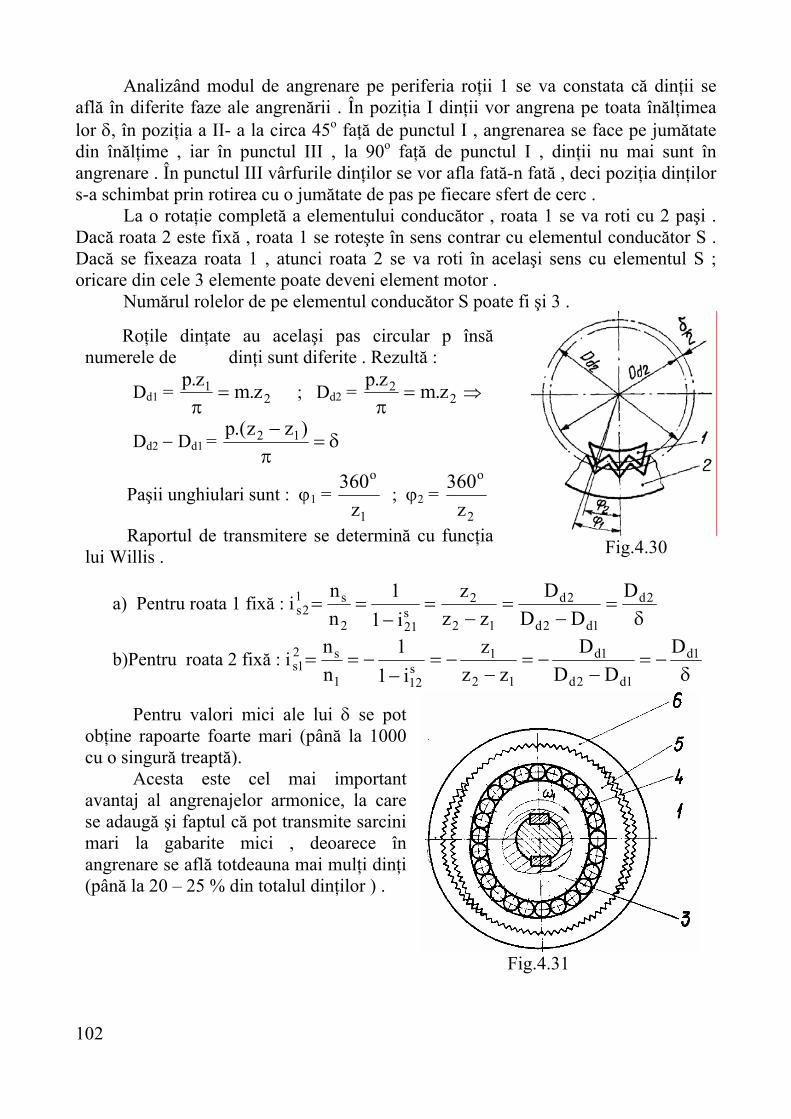
102
Analizând modul de angrenare pe periferia roţii 1 se va constata că dinţii se află în diferite faze ale angrenării . În poziţia I dinţii vor angrena pe toata înălţimea lor δ, în poziţia a II- a la circa 45o faţă de punctul I , angrenarea se face pe jumătate din înălţime , iar în punctul III , la 90o faţă de punctul I , dinţii nu mai sunt în angrenare . În punctul III vârfurile dinţilor se vor afla fată-n fată , deci poziţia dinţilor s-a schimbat prin rotirea cu o jumătate de pas pe fiecare sfert de cerc .
La o rotaţie completă a elementului conducător , roata 1 se va roti cu 2 paşi . Dacă roata 2 este fixă , roata 1 se roteşte în sens contrar cu elementul conducător S . Dacă se fixeaza roata 1 , atunci roata 2 se va roti în acelaşi sens cu elementul S ; oricare din cele 3 elemente poate deveni element motor .
Numărul rolelor de pe elementul conducător S poate fi şi 3 .
Fig.4.30
a) Pentru roata 1 fixă : iδ
=−
=−
=−
== 2d
1d2d
2d
12
2s212
s12s
DDD
Dzz
zi1
1nn
b)Pentru roata 2 fixă : iδ
−=−
−=−
−=−
−== 1d
1d2d
1d
12
1s121
s21s
DDD
Dzz
zi1
1nn
Fig.4.31
Roţile dinţate au acelaşi pas circular p însă numerele de dinţi sunt diferite . Rezultă :
Dd1 = 21 z.mz.p=
π ; Dd2 = 2
2 z.mz.p=
π ⇒
Dd2 − Dd1 = δ=π− )zz.(p 12
Paşii unghiulari sunt : ϕ1 = 1
o
z360
; ϕ2 = 2
o
z360
Raportul de transmitere se determină cu funcţia lui Willis .
Pentru valori mici ale lui δ se pot obţine rapoarte foarte mari (până la 1000 cu o singură treaptă).
Acesta este cel mai important avantaj al angrenajelor armonice, la care se adaugă şi faptul că pot transmite sarcini mari la gabarite mici , deoarece în angrenare se află totdeauna mai mulţi dinţi (până la 20 – 25 % din totalul dinţilor ) .

103
În figura 4.31 este prezentat un deformator (generator) tip camă (3) , care deformează elementul elastic dinţat prin intermediul rolelor cilindrice (4) .
Elementele dinţate se execută din oţeluri aliate de îmbunătăţire . Pentru solicitări mici elementul elastic se poate realiza din materiale
termoplastice , iar elementul rigid din aliaje de aluminiu , zinc etc. Modurile de deteriorare a unui angrenaj armonic dinţat sunt : uzarea
flancurilor, forfecarea dinţilor la bază , încălzirea , ruperea prin oboseală a elementului elastic .
Verificarea şi dimensionarea danturii se face din condiţia de rezistenţă la uzură a flancurilor dinţilor , limitându-se presiunea de contact dintre dinţii în contact .
4.14.Mecanisme cu roţi dinţate Transmisiile simple formate din două roţi dinţate , nu pot realiza rapoarte de
transmitere mari, din motive de gabarit . Practic , raportul de transmitere i12 < 6 , în mod excepţional putând avea valoarea maximă 10 .
Pentru mărirea raportului de transmitere se pot cupla mai multe angrenaje simple între ele formând trenuri de angrenaje . Dacă vom considera un tren de n angrenaje , atunci , raportul de transmitere de la axul 1 la axul n este , prin definiţie ,
raportul dintre viteza unghiulară a axului 1 şi cea a axului n , deci : i1n = n
1
ωω
Mecanismele cu roţi dinţate pot fi : în cascadă (fig.4.32) sau în serie (fig.4.33) .
Fig.4.32
La mecanismele cu roţi dinţate în cascadă se pot scrie rapoartele :
i12 = 1
2
2
1
zz
−=ωω
;
i23 = '2
3
3
2
zz
−=ωω
;
………………….
in-1,n = '1n
n
n
1n
zz
−
− −=ωω
Semnul minus arată că la angrenajele cilindrice exterioare , cele două roţi dinţate se rotesc în sensuri opuse .
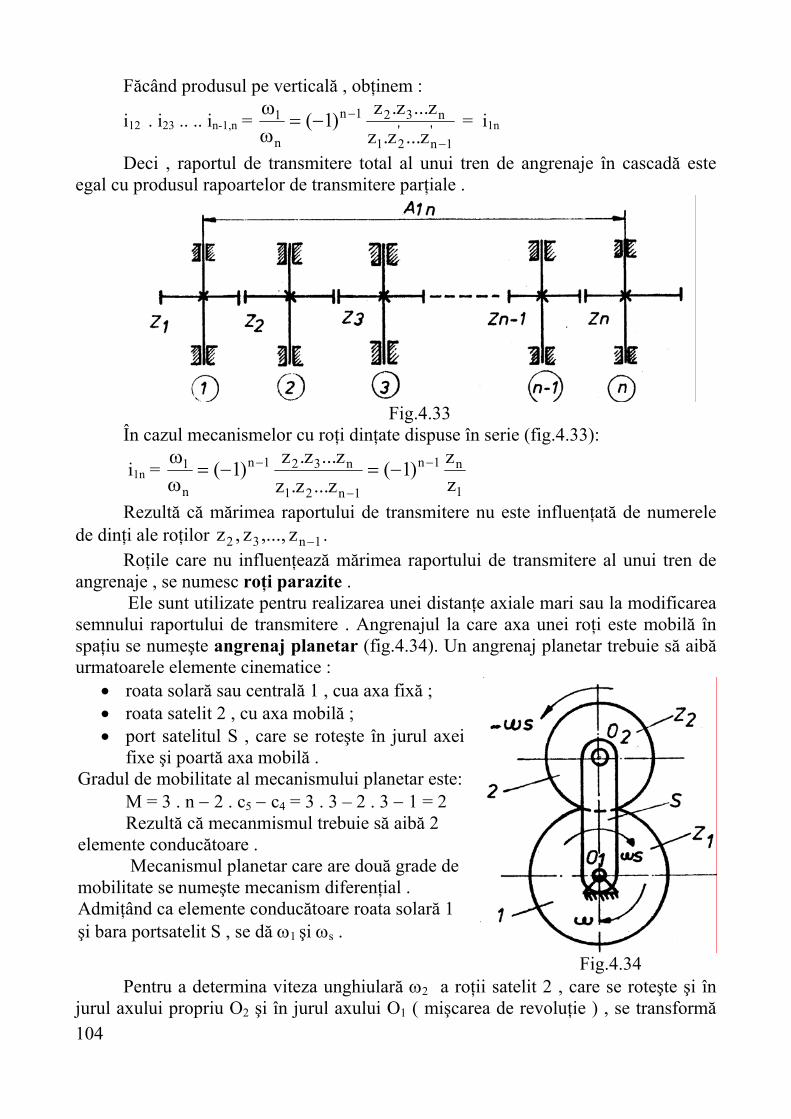
104
Făcând produsul pe verticală , obţinem :
i12 . i23 .. .. in-1,n = '1n
'21
n321n
n
1
z...z.zz...z.z)1(−
−−=ωω
= i1n
Deci , raportul de transmitere total al unui tren de angrenaje în cascadă este egal cu produsul rapoartelor de transmitere parţiale .
Fig.4.33
În cazul mecanismelor cu roţi dinţate dispuse în serie (fig.4.33):
i1n = 1
n1n
1n21
n321n
n
1
zz)1(
z...z.zz...z.z)1( −
−
− −=−=ωω
Rezultă că mărimea raportului de transmitere nu este influenţată de numerele de dinţi ale roţilor 1n32 z,...,z,z − .
Roţile care nu influenţează mărimea raportului de transmitere al unui tren de angrenaje , se numesc roţi parazite .
Ele sunt utilizate pentru realizarea unei distanţe axiale mari sau la modificarea semnului raportului de transmitere . Angrenajul la care axa unei roţi este mobilă în spaţiu se numeşte angrenaj planetar (fig.4.34). Un angrenaj planetar trebuie să aibă urmatoarele elemente cinematice :
Fig.4.34
Pentru a determina viteza unghiulară ω2 a roţii satelit 2 , care se roteşte şi în jurul axului propriu O2 şi în jurul axului O1 ( mişcarea de revoluţie ) , se transformă
• roata solară sau centrală 1 , cua axa fixă ; • roata satelit 2 , cu axa mobilă ; • port satelitul S , care se roteşte în jurul axei
fixe şi poartă axa mobilă . Gradul de mobilitate al mecanismului planetar este:
M = 3 . n − 2 . c5 − c4 = 3 . 3 – 2 . 3 − 1 = 2 Rezultă că mecanmismul trebuie să aibă 2
elemente conducătoare . Mecanismul planetar care are două grade de
mobilitate se numeşte mecanism diferenţial . Admiţând ca elemente conducătoare roata solară 1 şi bara portsatelit S , se dă ω1 şi ωs .

105
mecanismul planetar într-un mecanism ordinar , dându-se întregului mecanism planetar aflat în funcţiune , o mişcare de rotaţie suplimentară în jurul axului fix O1, cu viteza unghiulară −ωs . Astfel , bara S va ramâne fixă iar roata 1 va avea viteza unghiulară :
)( s1s1 ω−+ω=ω , iar roata 2 va avea viteza:
)( s2s2 ω−+ω=ω
În ipoteza că S este fix , mecanismul planetar s-a transformat într-un mecanism ordinar căruia îi putem calcula raportul de transmitere :
i azz
1
2
s21
s1s2
s1s
12 =−=ω−ωω−ω
=ωω
= formula lui Willis .
Dacă roata dinţată 1 este fixă (ω1 = 0 ) , mecanismul nu mai este diferenţial
(M = 1) , iar ω2 = ωs a
1a − .
Mecanismul planetar permite realizarea unor rapoarte de transmitere foarte mari sau foarte mici cu un număr redus de roţi .
Mecanismele cu roţi dinţate au o largă utilizare în construcţia de aparate ca mecanisme de reglare , de putere , de comandă , de urmărire , pentru realizarea unor operaţii matematice .
Mecanismele de reglaj sunt utilizate pentru reglajul unei deplasări liniare sau unghiulare , pentru reglajul fin al turaţiei , reglajul automat al forţei etc.
4.15.Construcţia reductoarelor cu roţi dinţate Reductoarele de turaţie cu roţi dinţate sunt formate din roţi dinţate montate pe
arbori şi închise într-o carcasă etanşă şi care servesc la mărirea sau micşorarea turaţiei (mai ales se utilizează la multiplicarea turaţiei ) şi la mărirea momentelor de torsiune .
Reductoare
După felul angrenajelor
După poziţia arborilor
După numărul de trepte
-cilindrice -conice -elicoidale -melcate -hipoide -combinate -planetare
-orizontale -verticale -înclinate
-cu o treapta -cu două trepte -cu mai multe trepte
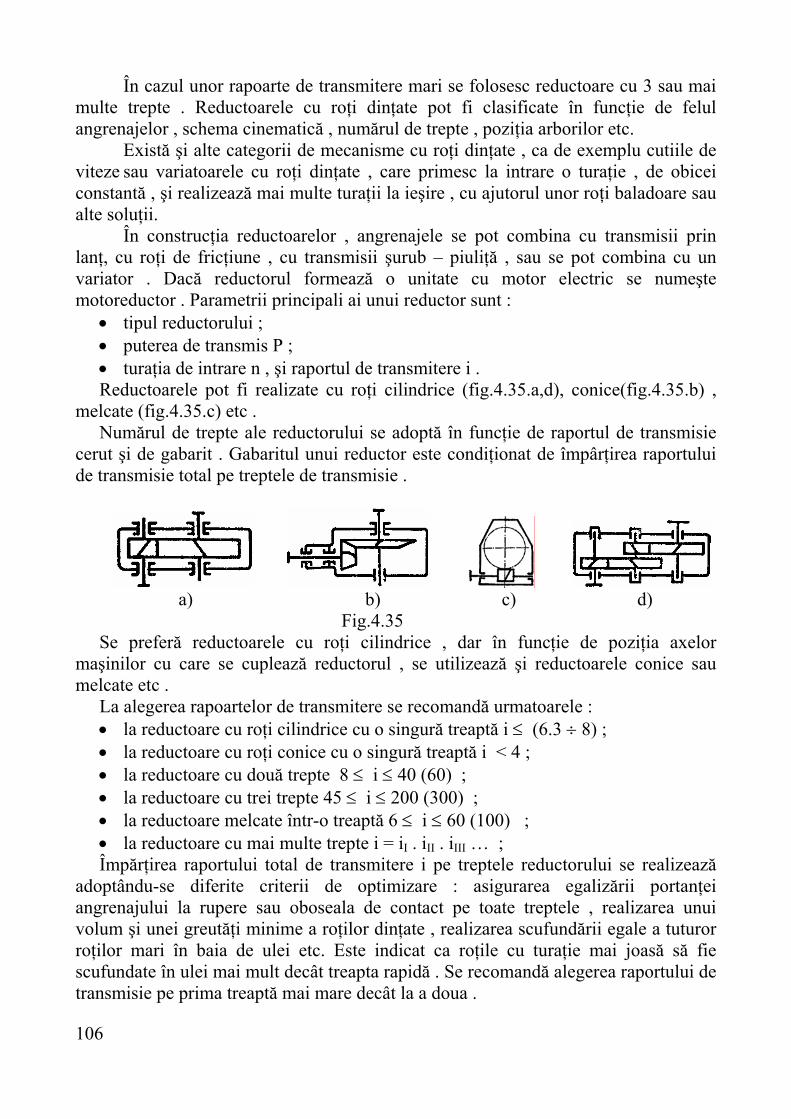
106
În cazul unor rapoarte de transmitere mari se folosesc reductoare cu 3 sau mai multe trepte . Reductoarele cu roţi dinţate pot fi clasificate în funcţie de felul angrenajelor , schema cinematică , numărul de trepte , poziţia arborilor etc.
Există şi alte categorii de mecanisme cu roţi dinţate , ca de exemplu cutiile de viteze sau variatoarele cu roţi dinţate , care primesc la intrare o turaţie , de obicei constantă , şi realizează mai multe turaţii la ieşire , cu ajutorul unor roţi baladoare sau alte soluţii.
În construcţia reductoarelor , angrenajele se pot combina cu transmisii prin lanţ, cu roţi de fricţiune , cu transmisii şurub – piuliţă , sau se pot combina cu un variator . Dacă reductorul formează o unitate cu motor electric se numeşte motoreductor . Parametrii principali ai unui reductor sunt :
• tipul reductorului ; • puterea de transmis P ; • turaţia de intrare n , şi raportul de transmitere i . Reductoarele pot fi realizate cu roţi cilindrice (fig.4.35.a,d), conice(fig.4.35.b) ,
melcate (fig.4.35.c) etc . Numărul de trepte ale reductorului se adoptă în funcţie de raportul de transmisie
cerut şi de gabarit . Gabaritul unui reductor este condiţionat de împârţirea raportului de transmisie total pe treptele de transmisie .
a) b) c) d) Fig.4.35 Se preferă reductoarele cu roţi cilindrice , dar în funcţie de poziţia axelor
maşinilor cu care se cuplează reductorul , se utilizează şi reductoarele conice sau melcate etc .
La alegerea rapoartelor de transmitere se recomandă urmatoarele : • la reductoare cu roţi cilindrice cu o singură treaptă i ≤ (6.3 ÷ 8) ; • la reductoare cu roţi conice cu o singură treaptă i < 4 ; • la reductoare cu două trepte 8 ≤ i ≤ 40 (60) ; • la reductoare cu trei trepte 45 ≤ i ≤ 200 (300) ; • la reductoare melcate într-o treaptă 6 ≤ i ≤ 60 (100) ; • la reductoare cu mai multe trepte i = iI . iII . iIII … ; Împărţirea raportului total de transmitere i pe treptele reductorului se realizează
adoptându-se diferite criterii de optimizare : asigurarea egalizării portanţei angrenajului la rupere sau oboseala de contact pe toate treptele , realizarea unui volum şi unei greutăţi minime a roţilor dinţate , realizarea scufundării egale a tuturor roţilor mari în baia de ulei etc. Este indicat ca roţile cu turaţie mai joasă să fie scufundate în ulei mai mult decât treapta rapidă . Se recomandă alegerea raportului de transmisie pe prima treaptă mai mare decât la a doua .

107
Carcasele reductoarelor se execută obişnuit prin turnare din fontă cenuşie , iar pentru solicitări mari din oţel , din aliaje de aluminiu (carcasa cutiei de viteze de la automobile), iar pentru serii mici se realizează în construcţie sudată .
Arborii se realizează foarte rigizi , de obicei arborele cu pinionul dintr-o bucată , iar arborii roţilor mari din OL 60 , OL 70 sau oţeluri carbon de calitate , respectiv oţeluri aliate de îmbunătăţire . Lagărele reductoarelor se realizează de obicei , cu rulmenţi şi numai în cazuri speciale ( încărcări foarte mari , turaţii mari , funcţionare silenţioasă) se utilizează lagărele cu alunecare .
Ungerea reductoarelor cu roţi dinţate se realizează de obicei cu uleiuri şi numai la viteze foarte mici cu unsori . Metoda de ungere se alege în funcţie de viteza periferică a roţilor dinţate , şi anume ;
• până la 12 – 15 m/s se utilizează ungerea prin barbotare ; • peste 15 m/s se foloseşte ungerea prin stropire (în circuit) ; Roata mare trebuie să pătrundă în baia de ulei minim 1 modul şi maxim 6 module.
4.16.Materiale pentru roţi dinţate
Principalele materiale folosite în construcţia roţilor dinţate sunt : oţelurile , fontele , metale neferoase , materiale plastice .Oţelurile sunt utilizate , în general , pentru angrenajele de lucru , de rezistenţă sau pentru angrenaje precise, la care uzura trebuie să fie mică . Se folosesc atât oţelurile carbon, cât şi oţelurile aliate .
La mecanismele de mai mică importanţă se pot utiliza oţelurile obişnuite sau oţelurile de calitate . Pentru roţile dinţate supuse unor solicitări importante trebuie utilizate oţeluri aliate ( oţel crom – nichel , crom – magnan) , dantura roţilor fiind tratată termic sau termochimic în vederea durificării superficiale a suprafeţelor de lucru . Fontele se utilizează pentru angrenaje de dimensiuni mari , dar care au viteze periferice realtiv scăzute . Roţile dinţate din fontă rezistă bine la uzură , dar mai puţin la solicitarea de încovoiere .
Bronzurile asigură o uzură relativ mică a dinţilor şi sunt utilizate îndeosebi pentru roţile dinţate care lucrează în medii corozive . Alama este utilizată în domeniul construcţiei de aparate de măsurat , asigurând o prelucrare precisă şi fiind antimagnetică .
Este folosită la angrenajele cu viteze şi sarcini mici . Materialele plastice realizează amortizarea vibraţiilor şi atenuarea zgomotului produse în timpul angrenării , asigurând şi o compensare a erorilor de danturare datorită modulului de elasticitate relativ scăzut . Materilalele plastice nu pot fi folosite însă în medii umede şi la temperaturi mai mari de 100oC . În vederea reducerii uzurii se recomandă utilizarea unor materiale diferite pentru cele două roţi .