Augustin Constantinescu
78
UNIVERSITATEA „TRANSILVANIA” DIN BRAŞOV FACULTATEA DE ALIMENTAŢIE ŞI TURISM Ing. Augustin CONSTANTINESCU OPTIMIZAREA AGREGATELOR FORMATE DIN TRACTOARE DE PUTERE MARE CU MAŞINI AGRICOLE PENTRU PREGĂTIREA TERENULUI ÎN VEDEREA ÎNSĂMÂNŢĂRII OPTIMISATION OF GREAT CAPACITY TRACTOR- AGRICULTURAL MACHINE AGGREGATE FOR PREPARATION OF SOIL FOR SOWING Rezumatul tezei de doctorat Summary of PhD Thesis CONDUCĂTOR ŞTIINŢIFIC Prof. Univ. Dr. Ing. Simion POPESCU Braşov 2010
Transcript of Augustin Constantinescu

UNIVERSITATEA „TRANSILVANIA” DIN BRAŞOV
FACULTATEA DE ALIMENTAŢIE ŞI TURISM
Ing. Augustin CONSTANTINESCU
OPTIMIZAREA AGREGATELOR FORMATE DIN TRACTOARE DE
PUTERE MARE CU MAŞINI AGRICOLE PENTRU PREGĂTIREA
TERENULUI ÎN VEDEREA ÎNSĂMÂNŢĂRII
OPTIMISATION OF GREAT CAPACITY TRACTOR- AGRICULTURAL
MACHINE AGGREGATE FOR PREPARATION
OF SOIL FOR SOWING
Rezumatul tezei de doctorat
Summary of PhD Thesis
CONDUCĂTOR ŞTIINŢIFIC
Prof. Univ. Dr. Ing. Simion POPESCU
Braşov 2010

MINISTERUL EDUCAŢIEI CERCETĂRII ŞI INOVĂRII UNIVERSITATEA „TRANSILVANIA” DIN BRAŞOV
BRAŞOV, B-DUL EROILOR NR.29, 500036, TEL. 0040-0268-413000 FAX. 0040-268-410525
RECTORAT
Către ………………………………………………………………. Vă aducem la cunoştinţă că în ziua de vineri, 26.02.2010, ora 11, în sala RP 6 (Amfiteatru), Corpul R, de la Facultatea de Alimentaţie şi Turism, va avea loc susţinerea publică a tezei de doctorat intitulată „Optimizarea agregatelor formate din tractoare de putere mare cu maşini agricole pentru pregătirea terenului în vederea însămânţării” elaborată de ing. Constantinescu T. Augustin, în vederea obţinerii titlului ştiinţific de Doctor, în domeniul fundamental ŞTIINŢE INGINEREŞTI, domeniul INGINERIE MECANICĂ. Comisia de evaluare şi susţinere a tezei de doctorat, numită prin ordinul Rectorului Universităţii „Transilvania” din Braşov, Nr. 3979/01.02.2010 are următoarea componenţă:
PREŞEDINTE: 1. Prof. univ. dr. ing. Romulus GRUIA Decan - Facultatea de Alimentaţie şi Turism Universitatea „Transilvania” din Braşov COND. ŞTIINŢIFIC: 2. Prof. univ. dr. ing. Simion POPESCU Universitatea „Transilvania” din Braşov REFERENŢI 3. Conf. univ. dr. ing. Ilie DUMITRU Universitatea din Craiova 4. Cerc. şt. pr. I dr. ing. Emil VOICU Institutul Naţional de Cercetare-Dezvoltare pentru Maşini şi Instalaţii Destinate Agriculturii
şi Industriei Alimentare-Bucureşti 5. Prof. univ. dr. ing. Gheorghe BRĂTUCU Universitatea „Transilvania” din Braşov
În cazul în care doriţi să faceţi aprecieri sau observaţii asupra conţinutului lucrării, vă rugăm să le transmiteţi pe adresa Departamentului de Doctorat al Universităţii sau prin e-mail: [email protected] şi [email protected]

UNIVERSITATEA „TRANSILVANIA” DIN BRAŞOV
FACULTATEA DE ALIMENTAŢIE ŞI TURISM
Ing. Augustin CONSTANTINESCU
OPTIMIZAREA AGREGATELOR FORMATE DIN TRACTOARE DE
PUTERE MARE CU MAŞINI AGRICOLE PENTRU PREGĂTIREA
TERENULUI ÎN VEDEREA ÎNSĂMÂNŢĂRII
OPTIMISATION OF GREAT CAPACITY TRACTOR- AGRICULTURAL
MACHINE AGGREGATE FOR PREPARATION
OF SOIL FOR SOWING
Rezumatul tezei de doctorat
Summary of PhD Thesis
CONDUCĂTOR ŞTIINŢIFIC
Prof. Univ. Dr. Ing. Simion POPESCU
Membru titular al Academiei de Ştiinţe Agricole şi Silvice „Gheorghe Ionescu Siseşti”
Braşov 2010

CUPRINS
PREFAŢĂ .................................................................................................. 1. CONSIDERAŢII GENERALE PRIVIND PREGĂTIREA TERENULUI
ÎN VEDEREA ÎNSĂMÂNŢĂRII .............................................................. 1.1 Aspecte generale privind pregătirea terenului în vederea
însămânţării .................................................................................. 1.2 Cerinţe impuse lucrărilor de pregătire a patului germinativ pentru
diferite culturi …………………………………………………………. 1.3 Indici calitativi de lucru ai agregatelor pentru pregătirea patului
germinativ ..................................................................................... 1.4 Verificarea şi aprecierea lucrărilor de pregătire a patului
germinativ ...................................................................................... 1.5 Influenţa calităţii pregătirii patului germinativ asupra procesului
de răsărire a plantelor semănate ..................................................
2. STADIUL ACTUAL PRIVIND REALIZĂRILE DE MAŞINI ŞI ECHIPAMENTE AGRICOLE UTILIZATE LA PREGĂTIREA TERENULUI ÎN VEDEREA ÎNSĂMÂNŢĂRII …………………………….
2.1 Maşini şi echipamente pentru pregătirea terenului în vederea însămânţării realizate în România ………………………………….. 2.1.1 Grape cu discuri ……………………………………………...... 2.1.2 Grape cu colţi ………………………………………………….. 2.1.3 Grape elicoidale şi oscilante ………………………………..... 2.1.4 Tăvălugi ……………………………………………………….... 2.1.5 Freze agricole ………………………………………………..... 2.1.6 Cultivatoare pentru prelucrare totală .................................... 2.1.7 Combinatoare şi agregate multiple ...................................... 2.1.8 Agregate complexe pentru pregătirea patului germinativ ....
2.2 Maşini şi echipamente pentru pregătirea terenului în vederea însămânţării realizate pe plan internaţional ………………………..
3. STADIUL ACTUAL AL CERCETĂRILOR TEORETICE ŞI
EXPERIMENTALE PRIVIND DINAMICA ŞI ENERGETICA SISTEMELOR TRACTOR – MAŞINĂ AGRICOLĂ UTILIZATE LA PREGĂTIREA TERENULUI ÎN VEDEREA ÎNSĂMÂNŢĂRII ………….
3.1 Stadiul actual al cercetărilor teoretice privind dinamica şi energetica sistemelor tractor - maşină agricolă utilizate la pregătirea terenului în vederea însămânţării ……………………… 3.1.1 Cercetări teoretice privind procesele de lucru şi dinamica
maşinilor agricole utilizate la pregătirea terenului în vederea însămânţării ………………………………………….. 3.1.1.1 Cercetări teoretice privind procesul de lucru şi
dinamica frezelor agricole ……………………………. 3.1.1.2 Cercetări teoretice privind procesul de lucru şi
dinamica maşinilor pentru afânarea adâncă a solului …………………………………………………...
3.1.1.3 Cercetări teoretice privind procesul de lucru şi dinamica tăvălugilor …………………………………...
5
7
7
7
7
8
8
9
99
10101010101011
11
15
15
15
15
16
17

3.1.2 Cercetări teoretice privind dinamica sistemelor tractor-maşină agricolă utilizată la pregătirea terenului în vederea însămânţării ……………………………………………………. 3.1.2.1 Dinamica sistemului tractor – maşină purtată în
spate …………………………………………………… 3.1.2.2 Dinamica sistemului tractor–maşină tractată ……… 3.1.2.3 Dinamica sistemului tractor-maşină semipurtată…... 3.1.2.4 Stabilitatea transversală a sistemului tractor –
maşină de lucru …………………………................... 3.1.3 Bilanţul de putere al tractorului……...................................... 3.1.4 Bilanţul energetic al sistemului tractor-maşină agricolă ……
3.2 Stadiul actual al cercetărilor experimentale a dinamicii şi energeticii sistemelor tractor-maşină agricolă …………………….. 3.2.1 Aspecte generale ……………………………………………… 3.2.2 Aparatura pentru măsurarea vitezelor unghiulare …………. 3.2.3 Aparatura pentru măsurarea vitezelor de deplasare a
maşinilor ……………………………………………………… 3.2.5 Aparatura pentru măsurarea forţelor şi momentelor de
torsiune …………………………………………………………. 3.2.6 Metode şi aparatură pentru determinarea forţelor de
rezistenţă la tracţiune ale maşinilor agricole ………………..
4. NECESITATEA ŞI OBIECTIVELE LUCRĂRII ...................................... 4.1 Necesitatea abordării temei .......................................................... 4.2 Obiectivele lucrării ........................................................................ 4.3 Metodica de cercetare ..................................................................
5. CERCETAREA TEORETICĂ ŞI MODELAREA DINAMICĂ ŞI ENERGETICĂ A SISTEMELOR TRACTOR-MASINĂ DE PREGĂTIT TERENUL ÎN VEDEREA ÎNSĂMÂNŢĂRII ……………………………....
5.1 Obiectivele cercetării teoretice privind dinamica sistemelor tractor-maşină agricolă utilizate la pregătirea terenului în vederea însămânţării …………………………………………………
5.2 Cercetări teoretice privind dinamica organelor de lucru ale maşinii utilizate la pregătirea terenului în vederea însămânţării … 5.2.1 Cercetări teoretice privind dinamica cuţitele pentru afânarea
şi decompactarea solului ………………………….. 5.2.2 Cercetări teoretice privind dinamica rotorului orizontal cu
cuţite pentru mărunţirea şi afânarea solului ………………… 5.2.3 Cercetări teoretice privind dinamica tăvălugului cu pinteni ..
5.3 Cercetări teoretice privind dinamica agregatului pentru pregătit patul germinativ ACPG-3 ………………………………………….....
5.4 Dinamica generală a sistemului tractor-agregat combinat pentru pregătit patul germinativ …………………………………................. 5.4.1 Stabilitatea longitudinală a tractorului cu maşina în poziţie
de lucru pe teren orizontal …………………………………… 5.4.2 Stabilitatea longitudinală a tractorului la coborârea pe pantă
cu maşina în poziţie de lucru …………………………. 5.4.3 Stabilitatea longitudinală a tractorului la urcarea pe pantă
cu maşina în poziţie de lucru ………………………………… 5.4.4 Stabilitatea longitudinală a tractorului cu maşina în poziţie
de transport ……………………………………………………..
18
182021
2222
232323
23
23
25
27272727
29
29 30
30
3133
34
36
36
37
38

5.5 Simularea pe calculator a dinamicii sistemului tractor- maşină agricolă pentru pregătirea terenului pentru semănat……………… 5.5.1 Aspecte generale ……………………………………………… 5.5.2 Simularea dinamicii sistemului tractor maşină de pregătit
patul germinativ ……………………………………………… 5.5.3 Interpretarea grafică a rezultatelor obţinute în urma simulării
dinamicii sistemului ………………………………… 5.6 Analiza energetică a sistemului tractor- agregat combinat pentru
pregătit patul germinativ ………………………............................... 6. CERCETĂRI EXPERIMENTALE PRIVIND DINAMICA ŞI ENERGETICA SISTEMELOR TRACTOR - MAŞINĂ AGRICOLĂ UTILIZATE LA PREGĂTIREA TERENULUI ÎN VEDEREA ÎNSĂMÂNŢĂRII .....................................................................................
6.1 Sistemul supus cercetării experimentale ...................................... 6.1.1 Tractorul utilizat la cercetările experimentale ....................... 6.1.2 Maşina agricolă utilizată la cercetările experimentale...........
6.2 Obiectivele şi programul încercărilor experimentale …………… 6.3 Aparatura şi metodica de investigare utilizată ..............................
6.3.1 Amplasarea în sistem a echipamentelor pentru investigaţia experimentală ................................................... 6.3.2 Metodica şi aparatura pentru măsurarea forţelor din cuplele
de legătură dintre tractor şi maşina agricolă purtată ……… 6.3.3 Măsurarea momentelor de torsiune la arborii cardanici de la
puntea faţă şi spate a tractorului şi a turaţiei acestora …. 6.3.4 Măsurarea momentului de torsiune şi a turaţiei arborelui
prizei de putere ………………………………………………… 6.3.5 Măsurarea turaţiei de la roata a 5-a ………………………….
6.4. Prelucrarea, analiza şi interpretarea rezultatelor experimentale.. 6.4.1 Prelucrarea datelor experimentale …………………………... 6.4.2 Analiza şi interpretarea rezultatelor cercetării experimentale
referitoare la dinamica sistemului ………….. 6.4.3 Analiza şi interpretarea energeticii sistemului utilizat la
pregătirea terenului pentru semănat …………………………
7. CONCLUZII ŞI CONTRIBUŢII PERSONALE …………………………… 7.1 Concluzii generale...................................... ………………………. 7.2 Concluzii rezultate din cercetările teoretice ………………………. 7.3 Concluzii rezultate din cercetările experimentale ………………… 7.4 Contribuţii personale ale autorului ………………………………….
BIBLIOGRAFIE ......................................................................................... Notă: Subcapitolele scrise înclinat se regăsesc în teza de doctorat.
4040
40
43
454545454647
47
50
51
53545555
57
59
6565656769
70

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
5
PREFAŢĂ
În sistema maşinilor pentru lucrările de pregătire a terenului în vederea
însămânţării, pe lângă maşinile simple formate din organe de lucru acţionate prin tractare (grape, cultivatoare, combinatoare) sau din organe acţionate prin priza de putere ( freze, maşini cu rotoare antrenate) au fost introduse în producţie din ce în ce mai mult agregatele multiple formate din combinaţii de maşini cu organe active antrenate (rotoare cu cuţite) şi maşini cu organe de lucru neantrenate (pasive). Dintre acestea, o largă dezvoltare şi utilitate o au agregatele pentru pregătit patul germinativ formate din organe de afânare adâncă, rotor cu cuţite pentru mărunţirea şi afânarea solului şi tăvălugi pentru mărunţirea suplimentară şi nivelarea solului. Prezenta teză se încadrează în preocupările care urmăresc găsirea de soluţii optime în construcţia agregatelor multiple de pregătit patul germinativ, cu scopul de a reduce necesarul de energie, a creşte productivitatea şi de a executa lucrări cu indici calitativi superiori. În acest sens, prezintă interes agregatul combinat pentru pregătit patul germinativ (ACPG-3), studiat sub aspect teoretic şi experimental. Pornind de la aceste considerente, lucrarea de doctorat abordează studiul dinamic şi energetic pentru fiecare tip de organ de lucru al maşinii, pentru agregat şi pentru sistemul tractor-maşină în ansamblul, în vederea stabilirii regimurilor optime de lucru, prin elaborarea de modele dinamice şi energetice şi simularea computaţională a comportării dinamice a acestuia. Teza de doctorat elaborată este structurată pe 7 capitole, conţine 214 pagini şi o listă bibliografică cu 156 titluri de lucrări reprezentative publicate în domeniu (inclusiv cele publicate de autor). În capitolul 1, intitulat „Consideraţii generale privind pregătirea terenului în vederea însămânţării”, se prezintă cerinţele agrotehnice impuse lucrărilor de pregătire a patului germinativ pentru diferite culturi, indicii calitativi ai agregatelor utilizate în acest scop, se descriu tehnologiile de pregătire a patului germinativ şi se analizează influenţa calităţii pregătirii acestuia asupra procesului de răsărire a plantelor semănate. În capitolul 2, intitulat „Stadiul actual privind realizările de maşini şi echipamente agricole utilizate la pregătirea terenului în vederea însămânţării”, se prezintă principalele tipuri de maşini şi echipamente utilizate la pregătirea terenului în vederea însămânţării realizate în România. De asemenea sunt prezentate realizări de maşini utilizate la pregătirea terenului în vederea însămânţării pe plan mondial, cu precădere agregate multiple (combinate) utilizate în acest scop. În capitolul 3, intitulat „Stadiul actual al cercetărilor teoretice şi experimentale privind dinamica şi energetica sistemelor tractor–maşină agricolă utilizate la pregătirea terenului în vederea însămânţării”, se face analiza procesului de lucru şi dinamicii unor maşini utilizate la pregătirea terenului în vederea însămânţării, a dinamicii pentru diferite sisteme tractor-maşină de lucru şi energeticii acestora. În partea a doua a capitolului se prezintă aparatura şi metodica de cercetare experimentală a dinamicii şi energeticii sistemelor tehnice tractor-maşină de lucru. În capitolul 4, intitulat „Necesitatea şi obiectivele lucrării”, se prezintă argumentele care au stat la baza realizării lucrării, obiectivele tezei de doctorat precum şi metodica de cercetare teoretică şi experimentală utilizată în scopul atingerii obiectivelor propuse. În capitolul 5, intitulat „Cercetarea teoretică şi modelarea dinamică şi energetică a sistemelor tractor-maşină de pregătit terenul în vederea însămânţării”, se face analiza dinamică a organelor de lucru şi se stabileşte modelul dinamic echivalent al agregatului pentru pregătit patul germinativ ACPG-3, se analizează dinamica generală a sistemului tractor-maşină considerat, în diverse situaţii de lucru, se

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
6
realizează simularea dinamicii sistemului pe calculator cu ajutorul soft-ului MAPLE12. Capitolul este completat în încheiere cu analiza energetică a sistemului tractor-agregat combinat pentru pregătit patul germinativ. În capitolul 6, intitulat „Cercetări experimentale privind dinamica şi energetica sistemelor tractor-maşină agricolă utilizate la pregătirea terenului în vederea însămânţării”, sunt prezentate obiectivele cercetărilor experimentale, obiectul supus cercetării experimentale (tractorul A1800-AM în agregat cu ACPG-3), metodologia şi aparatura de investigare experimentală utilizată la încercarea agregatului (rama tensometrică pentru măsurarea forţelor de rezistenţă la tracţiune a maşinilor agricole purtate cu dispozitive de cuplare categoria a III şi a IV-a, a fost concepută, proiectată şi realizată de autor). Se prezintă metodologia de prelucrare a datelor experimentale, se analizează şi se interpretează rezultatele cercetării experimentale referitoare la dinamica şi energetica sistemului. În capitolul 7, intitulat “Concluzii şi contribuţii personale”, se prezintă concluziile generale ale lucrării referitoare la realizările actuale de maşini agricole utilizate la pregătirea terenului în vederea însămânţării şi la stadiul actual al cercetărilor teoretice şi experimentale al acestor sisteme. De asemenea, se prezintă concluziile rezultate din cercetarea teoretică şi experimentală a sistemului analizat, contribuţiile personale ale autorului, precum şi direcţiile viitoare de cercetare în vederea aprofundării cercetărilor privind optimizarea dinamică şi energetică a sistemelor utilizate la pregătirea terenului în vederea însămânţării.
Încredinţat că rigoarea, spiritul academic şi claritatea ştiinţifică permanentă a conducătorului ştiinţific Prof. univ. dr. ing. Simion POPESCU, membru titular al Academiei de Ştiinţe Agricole şi Silvice, au făcut posibilă conceperea şi elaborarea prezentei lucrări de doctorat, autorul îşi exprimă sentimentele de gratitudine şi adâncă consideraţie faţă de Domnia Sa, fiindu-i recunoscător pentru valoroasa îndrumare ştiinţifică.
Mulţumesc stimaţilor referenţi pentru onoarea care mi-au făcut-o recenzându-mi lucrarea.
Mediul intelectual al prestigiosului lăcaş de cultură şi ştiinţă care este Universitatea Transilvania din Braşov a conferit o notă particulară acestui demers ştiinţific. Pe această cale mulţumesc cadrelor didactice de la Catedra de Maşini pentru Agricultură şi Industria Alimentară din cadrul Facultăţii de Alimentaţie şi Turism.
Cu profundă consideraţie autorul mulţumeşte, de asemenea, colectivelor de specialişti ai Institutului Naţional pentru Maşini Agricole (INMA) din Bucureşti şi SC MAT SA din Craiova, pentru sprijinul, disponibilitatea şi profesionalismul manifestate pe perioada desfăşurării încercărilor experimentale.
Colegilor de la Departamentul Autovehicule Rutiere, Maşini şi Instalaţii Agricole din cadrul Universităţii din Craiova, care mi-au fost alături pe parcursul elaborării tezei, le adresez acum recunoscătoare gânduri şi sentimente de consideraţie.
Mulţumesc tuturor prietenilor mei, cei care în toţi aceşti ani au crezut în mine şi mi-au fost alături atunci când am avut mai mare nevoie.
Mulţumesc familiei mele, fără de care nu puteam ajunge aici. Mulţumesc lui Dumnezeu!
Craiova, 2010 Ing. Augustin CONSTANTINESCU

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
7
CAPITOLUL 1
CONSIDERAŢII GENERALE PRIVIND PREGĂTIREA TERENULUI ÎN VEDEREA ÎNSĂMÂNŢĂRII
1.1 ASPECTE GENERALE PRIVIND PREGĂTIREA TERENULUI ÎN VEDEREA ÎNSĂMÂNŢĂRII Dată fiind marea varietate a proprietăţilor fizice ale solurilor existente, a
condiţiilor climatice şi a cerinţelor diverselor specii de plante cultivate este firesc a exista mai multe tehnologii de lucrare a solului, cuprinse în diferite sisteme tehnologice de cultură (sau sisteme agricole) şi folosind maşini diferite [30, 31, 81, 92, 102, 127, 133]:
Sistemul clasic (cu arătură). Sistemul de conservare a solului (fără arătură) Sistemul fără prelucrarea solului (semănat direct)
Este necesar ca lucrarea de pregătire a terenului în vederea semănatului să fie de bună calitatea, întrucât este ultima lucrare ce se execută înaintea semănatului şi eventualele abateri de la calitate nu mai pot fi corectate prin alte lucrări. Cerinţe agrotehnice specifice [24, 30, 31, 81, 127]: Cerinţa faţă de gradul de mărunţire şi dimensiunea maximă a fragmentelor depinde de mărimea seminţei şi este, în general, invers proporţională cu mărimea seminţei.
Gradul de afânare al stratului de sol lucrat trebuie să fie de 10-15% pentru a permite plantei să răsară, iar la plantele cu răsărire epigeică (cu scoaterea cotiledoanelor în afara solului), cum ar fi fasolea, soia, năutul etc. de 15-25%. Adâncimea de lucru trebuie să fie egală cu adâncimea de semănat, în general, între 2 şi 10 cm. Uniformitatea adâncimii trebuie să fie de peste 90% pentru a avea simultaneitate a răsăririi culturii. Denivelările maxime admise sunt în general de circa 20% din adâncimea de semănat. Gradul de distrugere al vegetaţiei nedorite trebuie să fie de cel puţin 90%. Amestecarea stratului de sol lucrat este o cerinţă importantă în anumite situaţii cum ar fi tratamentele cu pesticide sau erbicide.
1.2 CERINŢE IMPUSE LUCRĂRILOR DE PREGĂTIRE A PATULUI GERMINATIV PENTRU DIFERITE CULTURI 1.2.1 Pregătirea patului germinativ pentru culturile de toamnă [ 30, 127, 133]:
1.2.2 Pregătirea patului germinativ pentru culturile de primăvară [ 30, 81, 133]:
1.3 INDICI CALITATIVI DE LUCRU AI AGREGATELOR PENTRU PREGĂTIREA PATULUI GERMINATIV
La agregatele pentru pregătirea patului germinativ, indicii de lucru calitativi sunt cei prezentaţi în literatura de specialitate [ 30, 81, 127, 133]:
- adâncimea medie a mobilizării solului, a patului germinativ, am - abaterea standard faţă de adâncimea medie de mobilizare a solului, sa, - abaterea accidentală maximă, ∆a;
- coeficientul de variaţie, Ca - gradul de mărunţire a solului Gms, la pregătirea patului germinativ

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
8
- gradul de afânare a solului, Gas, - gradul de nivelare a solului, Gns - gradul de distrugere a buruienilor, Gdb,
1.4 VERIFICAREA SI APRECIEREA LUCRĂRILOR DE PREGĂTIRE A PATULUI GERMINATIV Aprecierea lucrărilor de pregătire a patului germinativ se referă la alegerea
perioadei optime de efectuare a lucrării şi la respectarea indicii calitativi specifici: - respectarea momentului şi perioadei optime de execuţie; - realizarea adâncimii şi respectarea acesteia; - gradul de nivelare şi prezenţa bulgărilor; - gradul de mărunţire a solului; - gradul de distrugere a buruienilor; - prezenţa greşurilor.
1.5 INFLUENŢA CALITĂŢII PREGĂTIRII PATULUI GERMINATIV ASUPRA PROCESULUI DE RĂSĂRIRE A PLANTELOR SEMĂNATE
Prin tehnologiile de lucrare a solului se încearcă să se asigure condiţiile optime de germinare, răsărire şi dezvoltare a plantelor cultivate.
Există numeroase variante tehnologice de aplicare a lucrărilor solului pentru înfiinţarea unei culturi.
Practica agricolă actuală a consfinţit existenţa a trei tehnologii fundamentale de lucrare a solului :
- tehnologia convenţională (cu plug) care include aratul şi grăpatul în vederea pregătirii patului germinativ;
- tehnologia conservativă a solului (fără plug); - semănatul direct în sol nelucrat. Tehnologiile convenţionale şi cele conservative, care în prezent sunt
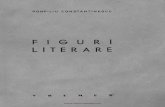
dominante, ele reprezentând împreună cca. 80% din totalul tehnologiilor de lucrare a solului aplicare pe plan mondial, impun ca un pat germinativ bine pregătit (fig. 1.2) să răspundă la următoarele cerinţe agrotehnice:
- seminţele trebuie să fie aşezate într-un strat de sol fin şi tasat pentru a permite apei din apropiere să vină în jurul seminţelor;
- stratul de sol pe care se aşează seminţele trebuie să fie mai tare pentru a favoriza creşterea imediată a plăntuţei pe verticală;
- suprafaţa solului trebuie să fie destul de grosieră pentru a se evita formarea crustei care împiedică buna răsărire a plantelor şi favorizează pierderea apei din sol.
Fig.1.2 Structura unui pat germinativ ideal [81]:
1-strat de sol bulgăros; 2-strat de sol mărunţit fin (la nivelul seminţelor); 3-strat de sol tasat formând baza patului germinativ; 4-start de sol arat; 5-baza arăturii (mult tasată)

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
9
CAPITOLUL 2
STADIUL ACTUAL PRIVIND REALIZĂRILE DE MAŞINI ŞI ECHIPAMENTE AGRICOLE UTILIZATE LA PREGĂTIREA TERENULUI
ÎN VEDEREA ÎNSĂMÂNŢĂRII
2.1 MAŞINI ŞI ECHIPAMENTE PENTRU PREGĂTIREA TERENULUI ÎN VEDEREA ÎNSĂMÂNŢĂRII REALIZATE ÎN ROMÂNIA
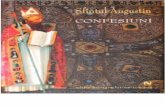
2.1.1 Grape cu discuri În tabelul 2.1 sunt prezentate principalele tipuri constructive de grape cu
discuri folosite la pregătirea terenului pentru semănat fabricate în România.
Tabelul 2.1 Nr. crt.
Grapa
Tipul
Destinaţia
Tractorul cu care lucrează
Capacitatea de lucru (ha/sch)
0 1 2 3 4 5 1 Grapa cu
discuri grea GDG-6,4
Tractată, cu rabaterea în transport a bateriilor laterale şi acţionare hidraulică
Grăpatul arăturii şi discuitul miriştii sau porumbiştii pe soluri uşoare, mijlocii şi grele
A 1800 A T 195 - 1U
25
2 Grapa cu discuri GD-6,4
Tractată, cu cărucior de transport şi acţionare hidraulică
Grăpatul arăturii şi discuitul miriştii pe soluri uşoare, mijlocii
A 1800 A T 195 - 1U
25 3 Grapa cu
discuri grea GDG-4,2
Tractată, cu cărucior de transport şi acţionare hidraulică
Grăpatul arăturii şi discuitul miriştii pe soluri grele
A 1800 A T 195 - 1U
20 4 Grapa cu
discuri GDU-3,4 şi GDU-4,4
Tractată, cu acţionare hidraulică
Grăpatul arăturii pe toate tipurile de sol
U 650M (651M) SM 851 (853) U 1010 (1010DT)
15 20
5 Grapa cu discuri GD-4 (GD-3,2)
Tractată, cu acţionare hidraulică
Grăpatul arăturii şi discuitul miriştii pe soluri uşoare, mijlocii
U 650 M (651M) U 800 (801)
16 (12)
6 Grapa cu discuri GDP-2,5
Purtată Grăpatul arăturii pe sol uşor, mijlociu
U 650 M U 800
10
7 Grapa cu discuri GDPR-1,8
Purtată Grăpatul arăturii pe terenuri în pantă
SM 445 U 445 DT
8
8 Grapa cu discuri GDU-2,2
Purtată Grăpatul arăturii pe sol uşor, mijlociu
U 445 T 045-1U
8
Fig. 2.1 Grapa cu discuri grea – Superdisc-6,4 – SC MAT Craiova

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
10
2.1.2 Grape cu colţi
Grapele cu colţi se pot folosi la pregătirea terenului în vederea însămânţării singure doar pe arături care se realizează în condiţii foarte bune, dar de cele mai multe ori ele se folosesc în combinaţii cu alte organe de lucru.
.2.1.3 Grape elicoidale şi oscilante Grapele elicoidale se folosesc în combinaţie cu alte utilaje cum ar fi grape cu discuri, grape cu colţi, cultivatoare pentru cultivaţie totală etc., efectuând operaţia de finisare a lucrării de pregătire a terenului în vederea semănatului. 2.1.4 Tăvălugi Tăvălugii sunt destinaţi, în principal, pentru tasarea stratului superior al solului, micşorând astfel gradul de afânare realizat prin lucrările anterioare, mărunţirea bulgărilor şi spargerea crustei. Tăvălugii se pot realiza cu suprafaţă netedă denumiţi „tăvălugi netezi” sau cu suprafaţă denivelată denumiţi „tăvălugi inelari”. 2.1.5 Freze agricole Frezele utilizate la prelucrarea totală a solului în vederea însămânţării execută această lucrare la o singură trecere, la adâncimi ce pot alunge până la 20 – 25 cm.
În figura 2.10 este prezentată freza fabricată la Mecanica „Ceahlăul” Piatra Neamţ care se realizează în mai multe variante de lăţimi de lucru şi care are caracteristicile tehnice prezentate în tabelul 2.7. Freza este de tip purtat.
Tabelul 2.7
Nr. crt.
Tipul frezei
Tractor necesar
(CP)
Lăţimea de lucru
(m)
Adâncimea de lucru
(cm)
Nr. de flanşe
portcuţit
Nr. total de cuţite
Masa netă (kg)
1 B-1300 45 1,3 12 7 28 215 2 B-1400 45 1,4 12 7 28 225 3 B-1500 65 1,5 12 8 32 250 4 B-1600 65 1,6 12 8 32 265 5 B-1800 65 - 80 1,8 12 10 40 330
Fig. 2.10 Freză fabricată la Mecanica „Ceahlăul” Piatra Neamţ [145]
2.1.6 Cultivatoare pentru prelucrare totală Sunt destinate pentru prelucrarea totală a solului în vederea semănatului. Cultivatorul pentru prelucrarea totală este format din cultivatorul propriu-zis echipat cu organe de lucru cu suport elastic, iar de partea posterioară a cadrului se montează mai multe câmpuri de grape elicoidale. 2.1.7 Combinatoare şi agregate combinate
În figura 2.16 se prezintă combinatorul COMBIMAX C4,6 (C6), realizat la SC MAT Craiova, care este destinat pentru pregătirea solului în vederea însămânţării. Adâncimea maximă de lucru este de 18 cm. Lucrează în agregat cu tractoare de peste 140 CP, pe terenuri plane sau cu panta de max. 100. Se pot echipa cu organe de afânare adâncă şi organe de cultivaţie totală.

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
11
Fig. 2.16 Combinatorul COMBIMAX C4 (6), produs de SC MAT Craiova [154]
În fig. 2.17 este prezentat un combinator ACPG-3 fabricat în prezent la SC
Mat Craiova, care este un agregat combinat pentru pregătit patul germinativ cu lăţimea de lucru de 3m si este destinat executării lucrărilor de pregătit patul germinativ la o singură trecere pe teren arat sau pe mirişte.
Agregatul ACPG-3 lucrează cu tractoare pe roţi de 180-240 CP, asigurând o încărcare raţională a acestora, pe teren şes sau cu panta de max. 60, pe toate tipurile de sol. Viteza de deplasare a agregatului în lucru este de 3-8 km/h.
Cu agregatul combinat ACPG-3, se poate pregăti patul germinativ la o singură trecere pe mirişte sau pe teren arat bolovănos, în condiţii superioare de calitate.
Agregatul este prevăzut cu posibilitatea de ataşare a unui echipament de semănat cereale păioase concomitent cu pregătirea patului germinativ.
Fig. 2.17 Combinatorul ACPG-3 (Agregatul combinat pentru pregătit patul germinativ) (produs de SC MAT Craiova)
2.1.8. Agregate complexe pentru pregătirea patului germinativ
În vederea reducerii consumului de carburanţi şi a numărului de treceri, în condiţiile respectării indicilor calitativi de lucru, în concordanţă cu cerinţele agrotehnice, se folosesc agregatele complexe formate dintr-un tractor şi mai multe maşini agricole [126].
2.2 MAŞINI ŞI ECHIPAMENTE PENTRU PREGĂTIREA TERENULUI ÎN VEDEREA ÎNSĂMÂNŢĂRII REALIZATE PE PLAN INTERNAŢIONAL Marile firme constructoare de maşini agricole şi-au diversificat gama utilajelor
destinate pregătirii terenului pentru semănat. O parte dintre acestea se pot constitui în agregate complexe care la o singură trecere realizează administrarea îngrăşămintelor, erbicidarea, prelucrarea terenului pentru semănat şi semănatul.

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
12
În figura 2.21 este prezentată grapa cu discuri DXH produsă de firma Kverneland din Norvegia, în poziţie de transport şi în lucru. Este o grapă cu discuri grea, cu dispunerea bateriilor în “X” la care funcţionarea instalaţiei hidraulice este asistată de sistemul electronic de comandă şi control din cabină.
Fig. 2.21 Grapă cu discuri DXH - firma Kverneland [152]
În figura 2.22 este prezentată o grapă oscilantă cu colţi în combinaţie cu un tăvălug fabricată de firma Kuhn. Grapele firmei Kuhn se construiesc cu lăţimi de lucru de 3m, respectiv 4 m.
Fig. 2.22 Grapă oscilantă cu colţi - firma KUHN [145]
În figura 2.23 este prezentată freza cu rotoare verticale în combinaţie cu un tăvălug cu pinteni fabricată de firma Eberhardt din Germania, în poziţie de lucru şi în transport. Freza se realizează cu lăţimi de lucru de 3 până la 6m. Freza se foloseşte pentru pregătirea terenului în vederea însămânţării după arătură sau pe teren nearat când în faţa acesteia se cuplează la tractor organe de lucru pentru afânare adâncă (fig. 2.23, a).Adâncimea de lucru a frezei este de 5 – 25 (28 la unele modele) cm, iar viteza de lucru este de 5 ...7 km/h.
a b
Fig. 2.23 Freză cu rotoare verticale şi tăvălug cu pinteni - firma
Eberhardt din Germania [145]
În figura 2.25 este prezentată construcţia frezei cu rotor orizontal şi tăvălug cu pinteni realizată de firma KUHN. Reglarea adâncimii se face ridicarea sau coborârea tăvălugului cu pinteni. Se construiesc cu lăţimi de lucru de 2,5 ; 3 şi 4 m, puterea necesară pentru acţionare fiind de 120 – 200 CP. Transmisia reductorului este prevăzută cu o cutie de viteze pentru modificarea turaţiei rotorului cu cuţite.

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
13
Fig. 2.25 Freză cu rotor orizontal şi tăvălug cu pinteni - firma KUHN [145]
În figura 2.26 este prezentat agregatul combinat format din organe pentru
afânare adâncă, freza cu rotor orizontal cu cuţite şi un tăvălug cu pinteni, fabricat de firma Kuhn. Se construieşte cu lăţimi de 3 şi 4 m. Agregatul permite realizarea simultană a afânării solului, în teren nearat, până la adâncimea de 30 cm, amestecul omogen al resturilor vegetale şi pregătirea terenului pentru semănat.
Fig. 2.26 Agregat combinat: organe de afânare, rotor cu cuţite,
tăvălug cu pinteni - firma KUHN [145]
În figura 2.27 este prezentat un combinator format din organe pentru cultivaţie totală montate pe suport elastic, discuri pe suport rigid şi grapă elicoidală fixată pe suport elastic, fabricat de firma Vogel & Noot. Organele pentru cultivaţie totală (1) sunt formate din cuţit săgeată şi cuţit daltă reversibil montat în vârful acesteia.
Fig. 2.27 Combinator – firma Vogel & Noot [145]
În figura 2.28 este prezentat un combinator realizat de firma Gregoire Besson. Combinatorul este format dintr-un cadru pe care sunt montate: grapa cu discuri crenelate pe un rând în faţă, cuţite pentru afânare adâncă dispuse pe două rânduri, încă un rând de grapă cu discuri alternante cu tăiş neted şi crenelate şi în spate tăvălugul inelar profilat.

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
14
Fig. 2.28 Combinator – firma Gregoire Besson [145]
În figura 2.29 este prezentat combinatorul „Rubin” realizat de firma Lemken, în lucru, în agregat cu un tractor pe roţi, care realizează pregătirea terenului pentru semănat în teren nearat. Acest combinator se fabrică în mai multe variante: cu lăţimi de lucru de la 3 la 12 m, cu cadru rigid sau rabatabil hidraulic pentru cele cu lăţimi mai mari de 4 m, putând fi purtat sau semipurtat. Puterea necesară pentru acţionare este 100 – 360 CP, în funcţie de lăţimea de lucru.
Fig. 2.29 Combinator „Rubin”– firma Lemken [153]
În figura 2.30 este prezentat combinatorul „Kompactor” realizat de firma Lemken, în lucru, în agregat cu un tractor pe roţi, care realizează pregătirea terenului pentru semănat. Puterea necesară pentru acţionare este 100 – 280 CP, în funcţie de lăţimea de lucru [145, 153].
Fig. 2.30 Combinator „Kompactor”– firma Lemken [145]
În figura 2.31 este prezentat un combinator, în lucru, realizat de firma Kuhn. Combinatorul are cadrul rabatabil hidraulic şi posibilitatea cuplării cu o semănătoare.
Fig. 2.31 Combinator „Performer”– firma Kuhn [145]
Pe cadru se pot monta, în ordinea aleasă de utilizator, diferite combinaţii de cuţite săgeţi, grape şi tăvălugi. Combinatorul are cadrul rabatabil hidraulic şi posibilitatea cuplării cu o semănătoare.

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
15
CAPITOLUL 3
STADIUL ACTUAL AL CERCETĂRILOR TEORETICE ŞI EXPERIMENTALE PRIVIND DINAMICA ŞI ENERGETICA SISTEMELOR TRACTOR – MAŞINĂ
AGRICOLĂ UTILIZATE LA PREGĂTIREA TERENULUI ÎN VEDEREA ÎNSĂMÂNŢĂRII
3.1 STADIUL ACTUAL AL CERCETĂRILOR TEORETICE PRIVIND DINAMICA ŞI ENERGETICA SISTEMELOR TRACTOR - MAŞINĂ AGRICOLĂ UTILIZATE LA PREGĂTIREA TERENULUI ÎN VEDEREA ÎNSĂMÂNŢĂRII
3.1.1 Cercetări teoretice privind procesele de lucru şi dinamica maşinilor agricole utilizate la pregătirea terenului în vederea însămânţării
3.1.1.1 Cercetări teoretice privind procesul de lucru şi dinamica frezelor agricole
În procesul de lucru, asupra cuţitelor frezei acţionează forţe de tăiere. Sub acţiunea forţei de tăiere, apare, în acelaşi timp, o forţă rezistentă R din partea solului, egală cu forţa de tăiere Fp şi de sens opus. Forţa de rezistenţă R se poate descompune în componentele sale Rx şi Ry, ale căror valori se schimbă odată cu schimbarea forţei R [24, 102, 107].
Fig. 3.5 Forţele care acţionează, în lucru, asupra cuţitului de freză
Fig. 3.6 Variaţia forţei de rezistenţă a cuţitului, R, în funcţie de unghiul de
rotaţie al rotorului
În cazul valorilor cunoscute ale forţei circulare care se determină în funcţie de momentul de rotaţie M al frezei, cu relaţia:
R
MFp , (3.9)
iar forţa R se calculează cu relaţia:
coscos
0 pFRR , (3.10)
unde este unghiul dintre forţa R şi tangenta la cercul exterior al rotorului frezei. În procesul de lucru al frezei, în cazul frezării de sus în jos (fig. 3.5), asupra
acesteia acţionează forţe şi momente conform figurii 3.7 [24, 102].

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
16
Fig. 3.7 Forţele şi momentele care acţionează asupra frezei, în lucru
Considerând că direcţia rezultantei Rr este determinată de unghiurile şi ,
momentul M0 este dat de expresia: cos0 RRbRM rr (3.15)
3.1.1.2 Cercetări teoretice privind procesul de lucru şi dinamica maşinilor pentru afânarea adâncă a solului Având în vedere modul de acţiune a organelor active, maşinile pentru
afânarea adâncă a solului pot fi prevăzute cu: organe de lucru simple, neantrenate (fig. 3.8, a); organe active complexe, având părţi acţionate prin diverse mecanisme de la priza de putere a tractorului (fig. 3.8, b, c) [24, 81, 132].
Fig. 3.8 Principalele tipuri de maşini de afânat adânc [132]:
a - cu organe de lucru neantrenate; b, c - cu organe de lucru mobile (antrenate) 1 - organ activ; 2 – suport; 3 - cadru (bară suport)
Experimentările au demonstrat că forma şi poziţia (unghiul de atac) organelor
de lucru (fig. 3.12) exercită o puternică influenţă atât asupra gradului de prelucrare a solului [81].)
Fig. 3.12 Principalele tipuri constructive de organe active neantrenate pentru
afânarea adâncă a solului [81]

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
17
La deplasarea săgeţii în sol se opun rezistenţele elementare ale solului la tăiere şi deformare, a căror rezultantă în plan vertical este zxxz RRR (fig. 3.15),
dispusă sub un unghi faţă de orizontală ( = 15 - 28). Componenta orizontală Rxcuţit este forţa de rezistenţă la tracţiune , dată de relaţia:
Rxcuţit = b ks (3.18) unde: b este lăţimea de lucru a săgeţii, în cm; Ks – rezistenţa specifică a solului pe unitatea de lăţime de lucru;
Fig. 3.15 Schema forţelor care acţionează asupra cuţitului săgeată
de afânare, în timpul lucrului [107]
3.1.1.3 Cercetări teoretice privind procesul de lucru şi dinamica tăvălugilor Tăvălugii acţionează asupra solului, în timpul rulării, datorită greutăţii lor. Sub
acţiunea forţei de tracţiune Ft şi a greutăţii acestuia Gt, tăvălugul rulează pe suprafaţa solului şi comprimă stratul superior al solului, pe o adâncime h (fig. 3.17).
Fig. 3.17 Schema procesului de lucru, forţele şi momentele
care acţionează asupra tăvălugului [24, 81] Experimental s-a constatat că dimensiunile ridicăturii au valori minime pentru
unghiul de contact = 15 – 20. Din figura 3.17 se observă că [24, 107]:
cos22tt DD
h (3.22)
unde: h este adâncimea de lucru a tăvălugului şi Dt – diametrul tăvălugului Din relaţia de mai sus rezultă valoarea minimă a diametrului tăvălugului:
cos1
2
hDt (3.23)
În decursul procesului de lucru, asupra tăvălugului acţionează următoarele forţe şi momente (fig. 3.17): Gt – greutatea tăvălugului; Rs – reacţiunea solului (rezultanta forţelor ce se opun la comprimarea solului); Mf – momentul de frecare ce apare în lagărele axului tăvălugului; Ft – forţa de tracţiune.
br
MlGF ft
t
(3.25)
Dacă se consideră b = 0 şi se neglijează momentul de frecare Mf ,din ecuaţia de momente faţă de punctul B rezultă valoarea forţei de tracţiune:
fGr
lGF ttt (3.26)

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
18
3.1.2 Cercetări teoretice privind dinamica sistemelor tractor-maşină agricolă utilizată la pregătirea terenului în vederea însămânţării 3.1.2.1 Dinamica sistemului tractor – maşină purtată în spate 3.1.2.1.1 Dinamica sistemului tractor–maşină purtată în spate cu roţi de sprijin Considerând că agregatul tractor-maşină de pregătit terenul pentru semănat
se deplasează în lucru urcând o pantă longitudinală înclinată sub un unghi , într-o mişcare accelerată (vct.), forţele exterioare care acţionează în plan longitudinal asupra sistemului tractor - maşină, sunt prezentate în figura 3.21.
Forţele care acţionează asupra tractorului în procesul deplasării în lucru, sunt următoarele [83, 86, 131]: greutatea tractorului Gt; forţa de rezistenţă datorată pantei Rp = Gtsin; forţa rezultantă datorită inerţiei Rit; forţa de rezistenţă la rulare Rrt; momentele de rezistenţă la rulare la roţile punţilor din faţă Mr1 si spate Mr2; forţa motoare (forţa tangenţială de tracţiune) la roţile motoare ale tractorului Fm; reacţiunile normale ale solului Z1 şi Z2 la roţile punţilor din faţă şi, respectiv, spate.
Fig. 3.21 Schema forţelor exterioare care acţionează asupra sistemului tractor-maşină purtată (CCT-4), cu roţi de sprijin (de copiere), pentru pregătirea patului germinativ, la
deplasarea în lucru pe pantă longitudinală Forţa rezultantă datorată inerţiei Rit este:
21
1222
22
111
r
JJiJiJ
rmdt
dvmR mxxxtrtrM
ttit (3.36)
Forţa de rezistenţă la rulare a tractorului Rrt se determină cu relaţia : Rrt = f(Z1+Z2) = f Zt = fGtcos (3.40)
Momentul de rezistenţă global la rulare al roţilor punţilor tractorului Mr, este:
Mr = f r1Z1+ f r2 Z2 f r2(Z1+Z2) = f r2 Zt = r2 Rrt (3.43) Forţa motoare a tractorului Fm este dată de relaţia:
r
iMF trtre
m
(3.44)

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
19
Forţele care acţionează asupra maşinii agricole sunt: greutatea maşinii Gm; forţa de inerţie a maşinii Rim; forţa de rezistentă la rulare a roţii de sprijin a maşinii Rrm; momentul de rezistenţă la rulare a roţii de sprijin a maşinii Mrm; forţa rezultantă R creată de organele de lucru ale maşinii; reacţiunea normală a solului asupra rotii de sprijin Z3. (3.46)
Forţa de rezistenţă la rulare a maşinii Rrm acţionează asupra roţii de sprijin a maşinii şi se determină cu relaţia [83, 86, 131]:
Rrm = fsZ3, (3.47) Momentul de rezistentă la rulare a roţilor de sprijin ale maşinii Mr3 este dat de
relaţia: Mr3 = fs Zs r3 = Rrm r3 (3.48)
Din ecuaţiile de echilibru al sistemului rezultă recţiunile normale ale solului la punţile tractorului Z1 şi Z2 şi la roţile de sprijin ale maşinii Z3.
Din ecuaţia proiecţiilor forţelor după o direcţie paralelă cu suprafaţa terenului se determină expresia forţei motoare:
xmimrmtitrtm RGRRGRRF sinsin
(3.53) care reprezintă bilanţul de tracţiune pentru tractor în agregat cu maşina de lucru la urcare pe panta longitudinală.
3.1.2.1.2 Dinamica sistemului tractor – maşină purtată în spate fără roţi de sprijin
Fig. 3.22 Schema forţelor exterioare care acţionează asupra sistemului tractor-maşină purtată (GDV-2,2), fără roţi de sprijin, pentru pregătirea patului germinativ,
la deplasarea în lucru pe pantă longitudinală
Din ecuaţiile de echilibru al sistemului rezultă recţiunile normale ale solului la punţile tractorului Z1 şi Z2.
Din ecuaţia proiecţiilor forţelor după o direcţie paralelă cu suprafaţa terenului se determină expresia forţei motoare, Fm:
xsxfmimrmtitrtm RRGRRGRRF sinsin (3.71)
Stabilitatea longitudinală în mişcare (maniabilitatea) este asigurată dacă pe rotile de direcţie (rotile punţii din fată) apasă o sarcină de cel puţin 20% din greutatea statică a tractorului, adică dacă Z1 0,2Gt [83].
Stabilitatea longitudinală la răsturnare reprezintă capacitatea sistemului de a nu se răsturna în plan longitudinal şi este asigurată dacă pe rotile de direcţie (rotile punţii din fată) apasă o sarcină, adică dacă Z1 0 [83].

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
20
Stabilitatea longitudinală a tractorului trebuie verificată la urcarea pe pantă cu viteză constantă cu maşini purtate în spate, aflate în poziţie de transport (fig. 3.23 ). Din ecuaţiile de echilibru al sistemului rezultă recţiunile normale ale solului la punţile tractorului Z1 şi Z2.
Fig. 3.23 Schema forţele exterioare care acţionează asupra sistemului tractor-maşină
purtată în spate, în poziţie de transport, la urcare pe panta longitudinală
Stabilitatea longitudinală în mişcare (maniabilitatea) se determină din condiţia Z1 0,2Gt [83].
Stabilitatea dinamică la răsturnare longitudinală se determină punând condiţia Z1 = 0, în baza căreia se obţine expresia de calcul a unghiului critic al stabilităţii cr :
mmt
mtmmctcr hGhG
rGGflGaGtg
2 (3.81)
3.1.2.2 Dinamica sistemului tractor - maşină tractată
Schema forţelor exterioare care acţionează asupra sistemului tractor - maşina tractată la urcare, în lucru pe panta longitudinală este dată in figura 3.24.
Fig. 3.24 Schema forţelor exterioare care acţionează asupra sistemului tractor - maşina tractată pentru pregătirea patului germinativ (GDU-3,3),
la urcare, în lucru pe panta longitudinală

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
21
Din ecuaţiile de echilibru al sistemului rezultă recţiunile normale ale solului la punţile tractorului Z1 şi Z2.
Rezistenţa la rulare a tractorului are expresia Rrm = fsZ3. Rezistenţa la tracţiune a maşinii Rm, egală cu forţa de tracţiune a tractorului Ft,
se obţine din ecuaţia proiecţiilor forţelor pe direcţia de deplasare a maşinii, din care se obţine:
dt
dv
g
GZfRRGRRRRGRF m
sxsxfmimrmxsxfmmt 3sinsin (3.87)
care reprezintă ecuaţia bilanţului de tracţiune a maşinii. Stabilitatea longitudinală în mişcare (maniabilitatea) se determină din condiţia
Z1 0,2Gt [83] iar stabilitatea dinamică la răsturnare longitudinală se determină punând condiţia Z1 = 0, în baza căreia se obţine expresia de calcul a unghiului critic al stabilităţii cr .
3.1.2.3 Dinamica sistemului tractor-maşină semipurtată Schema forţelor care acţionează asupra tractorului în agregat cu o grapă cu
discuri semipurtată, în poziţie de transport pe un teren înclinat rezultă din figura 3.28. Din ecuaţiile de echilibru al sistemului rezultă recţiunile normale ale solului la
punţile tractorului Z1 şi Z2. Forţa de tracţiune Ft şi forţa de apăsare Fz se determină cu relaţiile:
3sinsin ZfGRGF smrmmt (3.103)
în care Z3 este reacţiunea normală a solului asupra roţilor maşinii şi se determină din ecuaţia de momente faţă de punctul de cuplare C (fig. 3.28).
m
rtrmtmimtmmmmm
l
MhRhhRhhGalGZ
33
sincos (3.105)
Fig. 3.28 Schema forţelor exterioare care acţionează asupra sistemului tractor – maşină de pregătit terenul pentru semănat (GDU-3,3), semipurtată,
în poziţie de transport, la urcare pe panta longitudinală Stabilitatea longitudinală în mişcare (maniabilitatea) se determină din condiţia
Z1 0,2Gt [83] iar stabilitatea dinamică la răsturnare longitudinală se determină punând condiţia Z1 = 0, în baza căreia se obţine expresia de calcul a unghiului critic al stabilităţii cr .

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
22
3.1.3. Bilanţul de putere al tractorului Ecuaţia bilanţului de putere al tractorului are forma [83, 86]:
aiPrtrppte PPPPPPPPP [W], (3.131)
vFP tt [W], (3.132)
30/'pppppp nMMP [W], (3.133)
Această putere redusă la arborele cotit al motorului va fi:
ppppp PP /' [W], (3.134)
etrtr PP )1( [W], (3.135)
Randamentul transmisiei se defineşte ca raport între puterea Pm transmisă roţilor motoare, şi puterea efectivă Pe , a motorului:
)/()/(/ tremeemmemtr iMMMMPP
cosfGvvRP rr [W], (3.136)
etrm PPP )1( [W], (3.137)
sinGvPp [W], (3.139)
dtmvdvP roti / [W], (3.140)
vRP aa [W], (3.141)
3.1.4 Bilanţul energetic al sistemului tractor-maşină agricolă
Structurarea agregatului mobil format din tractor şi maşină agricolă pentru pregătirea terenului în vederea însămânţării, având ca organ activ rotorul cu cuţite, iar ca organe pasive neantrenate, cuţite de afânare, grape sau tăvălugi cu pinteni, poate fi realizată pe două modele şi anume: În funcţie de ceea ce se urmăreşte, se pot elabora patru modele de calcul al bilanţului energetic (după locul în care se urmăreşte consumul de energie) şi anume (fig. 3.36) [109]: la roţile motoare ale tractorului, 1; în punctele de cuplare ale maşinii din agregat, 2; la arborele cotit al motorului, 3; la intrarea în motor, 4.
Bilanţul energetic al agregatului, prin prisma modelului energetic prezentat, este dat de relaţia:
Ec = Em + Et + Ema (3.145) care exprimă egalitatea între energia cedată prin arderea combustibilului în motor Ec şi suma energiilor consumate de motor Em, de tractor Et şi de maşina agricolă Ema.
MOTOR TRANSM. SIST. DE PROPULSIE MAŞ. AGR.
PRIZA DE PUTERE
A DC Q
Fig. 3.36 Schema pentru calculul bilanţului energetic A-ambreiaj; DC- dispozitiv cuplare

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
23
Bilanţul energetic al agregatului tractor-maşină agricolă pentru pregătirea
terenului în vederea însămânţării, având ca organ activ rotorul orizontal cu cuţite conform modelului energetic propus, se determină pe baza valorilor măsurate şi înregistrate în condiţii reale de lucru la încercările experimentale.
3.2 STADIUL ACTUAL AL CERCETĂRILOR EXPERIMENTALE A DINAMICII ŞI ENERGETICII SISTEMELOR TRACTOR-MAŞINĂ AGRICOLĂ
3.2.1 Aspecte generale Cercetarea experimentală a sistemului tractor-maşină de lucru are ca scop
investigarea experimentală a sistemului, determinând prin măsurători parametrii şi mărimile care caracterizează comportarea dinamică şi energetică a sistemului tractor-maşină în diferite condiţii de lucru ale maşinii.
3.2.2 Aparatura pentru măsurarea vitezelor unghiulare Traductoarelor pentru măsurarea vitezelor unghiulare (de turaţie) folosesc
tehnica generării impulsurilor prin contact şi fără contact . Acestea pot fi:
a) Traductoare de turaţii cu senzori de impulsuri cu contact b) Traductoare de turaţii cu senzori de impulsuri cu reluctanţă variabilă c) Traductoare de turaţii cu senzori de impulsuri prin proximitate d) Traductoare de turaţii prin impulsuri electrice
3.2.3 Aparatura pentru măsurarea vitezelor de deplasare a maşinilor Măsurarea vitezelor reale de deplasare a maşinilor mobile (mijloace de
transport şi maşini de lucru) se poate realiza prin convertirea vitezei unghiulare ω a unei roţi de direcţie, de sprijin sau auxiliare, care rulează fără alunecare cu viteza liniară v .Schema de principiu [ 4, 10, 20, 63, 76,109] privind măsurarea vitezei liniare cu ajutorul unei roţi auxiliare este prezentată în figura 3.42.
Fig. 3.42 Schema de principiu a unui traductor cu impulsuri pentru
măsurarea vitezelor de deplasare a maşinilor mobile: 1- corpul maşinii; 2- suport; 3- roată; 4- disc; 5- traductor de turaţie; 6- bară; 7- arc de apăsare.
3.2.5 Aparatura pentru măsurarea forţelor şi momentelor de torsiune 3.2.5.1 Aparatura pentru măsurarea forţelor [4, 5, 20, 28, 46, 50, 60, 63, 118]. Măsurarea forţelor de întindere sau compresiune se realizează în general cu tensorezistivi (denumiţi mărci tensometrice) se utilizează prin lipirea lor cu adezivi speciali pe piesa supusă la întindere sau compresiune. Deformaţia piesei se va transmite senzorului tensorezistiv a cărui rezistenţă se va modifica. Măsurând prin

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
24
mijloace electrice variaţia rezistenţei electrice a senzorului se poate determina, pe baza unei etalonări, mărimea tensiunii şi, respectiv, forţa care acţionează asupra piesei respective. Senzorii ataşaţi piesei se leagă în configuraţia unei punţi Wheatstone motiv pentru care instalaţia în ansamblu mai poartă denumirea şi de punte tensometrică.
Variaţiile relativ mici ale rezistenţei senzorilor tensorezitivi atunci când sunt supuşi la deformaţii impun utilizarea unor instalaţii speciale (fig. 3.45), unde există mai multe blocuri distincte. Senzorii ataşaţi piesei a cărei deformaţie se măsoară, printr-un dispozitiv de conectare se leagă în configuraţia unei punţi Wheatstone motiv pentru care instalaţia în ansamblu mai poartă denumirea şi de punte tensometrice. Ieşirea punţii Wheatstone se conectează la un circuit de prelucrare (amplificare, modulare şi filtrare), semnalul obţinut fiind afişat cu un dispozitiv analogic sau digital şi eventual înregistrat.
Fig. 3.45 Schema bloc a instalaţiei de măsură cu traductoare tensometrice.
Măsurarea forţelor de tracţiune [5, 20, 28, 46, 50, 60, 63, 118] se realizează folosind în general traductoare cu elemente elastice cu senzori tensorezistivi, construite din bare de tracţiune (fig.3.47), inele elastice (fig.3.48) sau bare supuse la încovoiere (fig. 3.49).
Fig. 3.47 Traductor tensometric pentru măsurarea forţelor de tracţiune:
a - schema de amplasare a mărcilor ; b - montarea mărcilor în punte de măsurare.
Fig. 3.48 Traductoare de forţă tensometrice cu inele elastice:
a - pentru tracţiune, b şi c - pentru compresiune, d - schema de montare a mărcilor în puntea de măsurare.

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
25
3.2.5.2 Aparatura pentru măsurarea momentelor de torsiune
Pentru măsurarea momentului de torsiune se utilizează metoda bazată pe tensometria electrică rezistivă (TER). În vederea realizării dispozitivului [5, 20, 28, 46, 50, 60, 63, 98] de măsurare bazat pe această metodă, pe arborele de măsurare (fig. 3.60) se aplică patru traductoare tensometrice TER (denumite mărci tensometrice), R1, R2, R3 şi R4: două traductoare sunt înclinate la 45° într-un sens (R1, R3), şi celelalte două (R2, R4), înclinate la 45° în celălalt sens (perpendicular pe primele), (fig. 3.51, a).
Fig. 3.51 Schema de măsurare a momentelor de torsiune prin metoda tensometriei
electrorezistive: a - amplasarea traductoarelor tensometrice (mărcilor) pe arbore; b - legarea mărcilor
tensometrice la aparatura de alimentare şi măsurare.
Legătura electrică între mărcile aplicate pe arborele în rotaţie şi instalaţiile de alimentare şi de măsurare se realizează cu ajutorul unui colector cu contacte alunecătoare format din periile a, b, c, d şi inelele colectoare A, B, C, D.
3.2.6 Metode şi aparatură pentru determinarea forţelor de rezistenţă la tracţiune ale maşinilor agricole
3.2.6.1 Determinarea experimentală a forţelor de rezistentă la tracţiune ale
maşinilor agricole remorcate şi semipurtate În cazul maşinilor remorcate şi semipurtate (fig. 3.53), forţa de rezistenţă la
tracţiune Ft se determină cu ajutorul unul dinamometru D montat între tractor şi maşina agricolă [28, 46, 50, 60, 63, 98, 118].
Fig. 3.53 Determinarea forţei de rezistenţă la tracţiune a maşinilor agricole semipurtate

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
26
Forţa de rezistenţă la tracţiune Ft care acţionează la corpul tractorului este dată de relaţia:
,RRF fmxt (3.168)
în care: Rx este componenta paralelă cu suprafaţa terenului a forţei de interacţiune dintre organele de lucru ale maşinii şi mediul supus prelucrării; Rfm – rezistenţa la rulare a roţilor de sprijin ale maşinii.
3.2.6.2 Determinarea experimentală a forţelor de rezistentă la tracţiune ale maşinilor agricole purtate
Determinarea forţei de rezistenţă la tracţiune a maşinilor agricole purtate prezintă unele dificultăţi. Metoda cea mai precisă pentru determinarea forţei de rezistenţă la tracţiune [10, 29, 60, 64, 75, 97] constă în măsurarea directă a forţelor care apar în bolţurile de cuplare. În acest scop, în punctele de articulaţie a tiranţilor la maşină se montează bolţurile tensometrice 1, 2 şi 3 (fig. 3.57, a), care măsoară componentele Fx, paralele cu direcţia de deplasare a maşinii şi Fz, perpendiculare la această direcţie (fig. 3.57, b).
Fig. 3.57 Schema pentru determinarea forţelor de rezistenţă la tracţiune
a maşinilor agricole purtate, prin măsurarea forţelor de legătură din bolţurile de cuplare la tiranţii mecanismului de suspendare:
a - schema de amplasare a traductoarelor de forţă; b - schema forţelor care acţionează în bolţuri 1, 2, 3- bolţuri tensometrice
Forţa Ft de rezistenţă la tracţiune a maşinii reprezintă suma algebrică a
componentelor Fx paralele cu direcţia de deplasare:
Ft= Rx= F1x+ F2x – F3x. (3.169)
Bolţurile sunt solicitate la încovoiere, putând fi fixate în consolă sau pe două reazeme. Pentru măsurarea forţelor pe cele două direcţii se montează corespunzător mărci tensometrice.

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
27
CAPITOLUL 4
NECESITATEA ABORDĂRII TEMEI. OBIECTIVELE LUCRĂRII
4.1 Necesitatea abordării temei
Cercetările teoretice şi experimentale referitoare la dinamica şi energetica sistemelor tractor-maşină pentru pregătirea terenului în vederea însămânţării au fost abordate sporadic şi sumar pe plan naţional şi internaţional [10, 11, 50, 61, 75, 76, 84, 98, 104, 109]. De aceea, a apărut ca o necesitate abordarea şi aprofundarea cercetărilor teoretice şi experimentale privind dinamica şi energetica acestor sisteme tehnice, care să conducă, în final, la optimizarea constructivă şi funcţională a maşinilor pentru pregătirea terenului în vederea însămânţării, precum şi la corelarea corectă a parametrilor tractorului, ca sursă de energie, cu cei ai maşinii de lucru, în vederea folosirii raţionale a puterii motoarelor şi a calităţilor de tracţiune ale tractoarelor şi realizarea unor lucrări cu productivitatea maximă şi indici calitativi corespunzători. 4.2 Obiectivele lucrării de doctorat Lucrarea îşi propune realizarea următoarelor obiective:
analiza sistemelor actuale de maşini folosite pentru pregătirea terenului în vederea însămânţării pe plan naţional şi internaţional;
analiza organelor de lucru şi proceselor de lucru ale maşinilor utilizate la pregătirea terenului în vederea însămânţării;
studiul teoretic al dinamicii şi energeticii sistemului tractor maşină pentru pregătirea terenului în vederea însămânţării;
cercetarea experimentală a dinamicii şi energeticii sistemului tractor – maşină de pregătirea terenului pentru semănat în vederea analizei influenţei parametrilor constructivi şi funcţionali ai maşinii asupra dinamicii şi energeticii tractorului;
compararea rezultatelor cercetărilor experimentale cu cele teoretice în vederea definitivării modelelor dinamice şi energetice;
elaborarea de concluzii referitoare la metodele de optimizare constructivă şi funcţională a maşinii în vederea optimizării parametrilor dinamici şi energetici ai sistemului.
Obiectivul final al cercetărilor îl reprezintă elaborarea unor modele dinamice şi matematice finale, pe baza completării sau corelării modelelor dinamice iniţiale şi, implicit a modelelor matematice care descriu comportarea dinamică a sistemelor. Ca urmare, modelele matematice finale vor permite simularea pe calculator a comportării dinamice a sistemelor reale tractor-maşină, pentru diferite variante de alcătuire, de deplasare şi de lucru. În acest fel, cercetarea teoretică realizată prin simulare pe calculator completează sau înlocuieşte, în mare parte, cercetarea experimentală complicată şi costisitoare.. 4.3 Metodica de cercetare În cadrul lucrării vor fi abordate atât latura teoretică (modelare şi simulare computaţională), cât şi cea experimentală, conform schemei dedicate [figura 4.1]. Cercetarea teoretică a sistemului tractor-maşină are la bază modelarea dinamică a sistemului fizic real, pe baza căreia se stabilesc modelele dinamice

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
28
echivalente şi se elaborează modelele matematice, care reprezintă ansamblul ecuaţiilor ce exprimă legăturile dintre parametrii dinamici ai componentelor sistemului tractor maşină. Modelele matematice elaborate permit studierea teoretică a comportării dinamice şi energetice a sistemului tractor-maşină pentru pregătirea terenului în vederea însămânţării, în diferite condiţii de lucru, prin cercetarea (simularea) pe calculator. Cercetarea experimentală a sistemului tractor-maşină pentru pregătirea terenului în vederea însămânţării are ca scop investigarea experimentală a sistemului prin determinarea, prin măsurători, direct sau indirect a parametrilor şi a mărimilor care caracterizează comportarea dinamică şi energetică a sistemului în diferite condiţii de lucru.
SISTEM TRACTOR-
MAŞINĂ DE LUCRU
Fig. 4.1 Schema metodei de cercetare pentru sistemul tractor-maşină pentru pregătirea terenului în vederea însămânţării
CERCETĂRI EXPERIMENTALE
MODEL DINAMIC INIŢIAL
SIMULARE PE CALCULATOR
MODELE MATEMATICE
COMPARARELTA
REZU TE
NU
DA
ELABORARE MODEL DINAMIC FINAL

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
29
CAPITOLUL 5
CERCETAREA TEORETICĂ ŞI MODELAREA DINAMICĂ ŞI ENERGETICĂ A SISTEMELOR TRACTOR-MASINĂ DE PREGĂTIT TERENUL
ÎN VEDEREA ÎNSĂMÂNŢĂRII
5.1 OBIECTIVELE CERCETĂRII TEORETICE PRIVIND DINAMICA SISTEMELOR TRACTOR-MASINĂ AGRICOLĂ UTILIZATE LA PREGĂTIREA TERENULUI ÎN VEDEREA ÎNSĂMÂNŢĂRII
Pentru cercetările teoretice privind dinamica sistemelor tractor-maşină agricolă
utilizate la pregătirea terenului în vederea însămânţării s-au propus realizarea următoarelor obiective de bază:
1. Analiza proceselor de lucru şi a forţelor exterioare (modelare dinamică) care acţionează din partea solului asupra organelor de bază ale maşinii de pregătit patul germinativ ACPG-3: cuţitele pentru afânarea şi decompactarea solului nearat, rotorul orizontal cu cuţite pentru tăierea şi mărunţirea solului şi tăvălugul cu pinteni folosit pentru mărunţirea suplimentară şi tasarea solului;
2. Elaborarea modelului dinamic echivalent al ansamblului maşinii de pregătit
patul germinativ ACPG3, formată din 4 cuţite pentru afânarea solului (tip săgeată mare) sau 4 cuţite pentru decompactarea solului (tip săgeată mică) montate rigid pe acelaşi suport de cadrul maşinii), rotorul orizontal cu cuţite care este antrenat de la priza de putere a tractorului şi tăvălugul cu pinteni fixate prin lagăre cu rostogolire de cadrul maşinii şi bolţurile de cuplare (prindere) a maşinii la mecanismul de suspendare în 3 puncte al tractorului;
3. Elaborarea modelului matematic pentru determinarea reacţiunilor în
articulaţiile (boţurile) de cuplare (prindere) a maşinii la mecanismul de suspendare în 3 puncte al tractorului, a reacţiunii rezultate pe patinele de sprijin ale rotorului cu cuţite şi stabilirea rezistenţei la tracţiune a maşinii de pregătit patul germinativ (bilanţul de tracţiune al maşinii) şi a momentului de torsiune necesar pentru antrenarea rotorului cu cuţite prin simulare computaţională;
4. Elaborarea modelului dinamic echivalent al sistemului tractor-maşină de pregătit patul germinativ, la deplasarea în lucru cu viteză constantă, pe teren orizontal şi pe teren înclinat (urcare), determinarea reacţiunilor pe roţile tractorului (elaborarea modelului matematic al sistemului tractor-maşină de pregătit patul germinativ) şi stabilirea bilanţului de tracţiune al tractorului.
5. Studiul stabilităţii longitudinale a sistemului tractor-maşină de pregătit patul
germinativ pe teren înclinat (la urcare) la deplasarea cu maşina în poziţie de lucru şi transport, prin elaborarea modelelor dinamice şi matematice corespunzătoare;
6. Analiza energetică a sistemului tractor agregat combinat pentru pregătit patul
germinativ, ACPG-3, pe baza modelelor energetice echivalente, care iau în considerare atât parametrii cinematici şi dinamici cât şi condiţiile concrete de lucru (cerinţe tehnologice, regimul de lucru, parametrii componentelor sistemului) şi stabilirea bilanţului energetic al sistemului.

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
30
5.2 CERCETĂRI TEORETICE PRIVIND DINAMICA ORGANELOR DE LUCRU ALE MAŞINII UTILIZATE LA PREGĂTIREA TERENULUI ÎN VEDEREA ÎNSĂMÂNŢĂRII
5.2.1 Cercetări teoretice privind dinamica cuţitele pentru afânarea şi decompactarea solului Cuţitele pentru afânarea solului (poz.1, fig. 5.1, a) utilizate sunt de tip săgeată
mare, iar cuţitele pentru decompactare sunt de tip săgeată mică. Agregatul combinat pentru pregătit patul germinativ ACPG3 are patru astfel de
organe de afânare, dispuse pe toată lăţimea de lucru şi se pot fixa fiecare cu câte un bolţ în mai multe poziţii pe verticală pentru reglarea adâncimii de lucru.
Fig.5.1. Dinamica interacţiunii dintre cuţitul de afânare şi sol: a – schema cuţitului cu suport şi forţele care acţionează asupra cuţitului şi suportului său;
b – schema forţelor după direcţiile orizontală şi verticală. În procesul interacţiunii cuţitului de afânare cu solul asupra suprafeţei acestuia
acţionează forţele prezentate în figura 5.1 care au următoarea semnificaţie [9, 24, 33, 35, 95,107, 132] : Rcs – forţa de rezistenţă a solului (se descompune după cele două axe în componentele orizontală Rxcs şi verticală Rzcs); Fncs – forţa normală pe suprafaţa cuţitului care acţionează din partea solului în procesul de lucru;Ffcs – forţa de frecare dintre suprafaţa cuţitului şi sol, definită prin relaţia: ncsfcs FF (unde μ
este coeficientul de frecare dintre sol şi suprafaţa cuţitului). Rxsc- forţa de rezistenţă a solului asupra suportului cuţitului la tăierea şi despicarea solului în plan vertical;
Rezultanta analitică a acţiunii solului asupra suprafeţei cuţitului Rcs este dată de relaţia:
2222zcsxcsfcsncscs RRFFR (5.2)
Pentru studiul dinamicii cuţitului săgeată se înlocuieşte acţiunea forţelor care acţionează asupra cuţitului Rcs şi asupra suportului acestuia Rxsc cu rezultanta RC a cuţitului (fig. 5.2) care se descompune în componentele orizontală Rxc şi verticală RzC. Schema echivalentă a forţelor din figura 5.2 reprezintă modelul dinamic echivalent al cuţitului de afânare.

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
31
Fig.5.2. Schema dinamică echivalentă a cuţitul de afânare
Din ecuaţiile de echilibru al ansamblului cuţitului din modelul dinamic
echivalent prezentat în schema din figura 5.2 se obţin relaţiile: xctc RF (5.3)
în care Ftc este forţa de tracţiune exercitată de tractor asupra cuţitului aplicată în punctul de cuplare al suportului cuţitului la cadrul maşinii (punctul A). Reacţiunea verticală Fzc a cuţitului asupra cadrului maşinii:
zczc RF (5.4)
5.2.2 Cercetări teoretice privind dinamica frezei cu rotor orizontal cu cuţite pentru mărunţirea şi afânarea solului În procesul de lucru, datorită forţei de tracţiune exercitate de tractor, a
momentului de torsiune transmis prin priza de putere şi a greutăţii ce revine pe rotor, asupra rotorului cu cuţite acţionează forţe şi momente [9, 23, 24, 33, 36, 95,107, 132] evidenţiate conform schemei din figura 5.4
Fig.5.4 Dinamica interacţiunii dintre rotorul cu cuţite, patină, oblon şi sol
în procesul de lucru: a – schema sarcinilor care acţionează asupra rotorului cu cuţite, patinei,
oblonului de nivelare şi în punctele de cuplare a maşinii la tractor b – schema forţelor după direcţiile orizontală şi verticală
În figura 5.4 s-au făcut următoarele notaţii: Gr – forţa de greutate ce
acţionează pe rotor; Rr – rezultanta rezistenţelor opuse la tăierea şi desprinderea feliilor de sol (cu cele două componente ale sale Rxr şi Rzr); Mr – momentul la rotorul frezei transmis prin priza de putere a tractorului; Mo – momentul rezistent datorită

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
32
rezistenţelor opuse la tăierea şi azvârlirea feliilor de sol desprinse de cuţite; F1xr, F1zr, F23xr, F23zr – sunt reacţiunile orizontale, respectiv verticale ale rotorului asupra tractorului în punctele de cuplare superior şi inferioare; r – raza exterioară a rotorului cu cuţite; a, ar – adâncimea de lucru a rotorului cu cuţite înainte şi după trecerea acestuia; ω – viteza unghiulară a rotorului cu cuţite.
Momentul la rotorul frezei transmis prin priza de putere a tractorului, Mr, se calculează cu relaţia [24, 107, 132]: cos rRrRM rpr (5.6)
Asupra patinelor, în procesul de lucru, acţionează forţele: Zp – reacţiunea rezultantă în punctele de contact ale patinelor cu solul, Zp=Zs+Zd, unde Zs, Zd sunt reacţiunile solului pe patina stânga şi dreapta; Xp – forţa de frecare dintre suprafaţa patinelor şi sol, definită prin relaţia: ppp ZX (unde p este coeficientul de frecare
dintre sol şi suprafaţa patinei) În procesul de lucru asupra oblonului de nivelare acţionează forţele: Fno – forţa
normală pe suprafaţa oblonului care acţionează din partea solului în procesul de lucru; Ffo – forţa de frecare dintre suprafaţa oblonului şi sol, definită prin relaţia: noofo FF (unde o este coeficientul de frecare dintre sol şi suprafaţa
oblonului. Rezultanta Ro a celor două forţe Fno şi Ffo este (fig. 5.4, a) se descompune in două componente Rxo, resp. Rzo (fig. 5.4, b).
Fig. 5.5 Schema dinamică echivalentă a frezei cu rotor orizontal
Schema echivalentă a forţelor din figura 5.4,b este dată în modelul dinamic
echivalent din figura 5.5 în care forţa de rezistenţă, Ro, opusă de sol oblonului de nivelare este redusă în raport cu punctul C de contact al patinei cu solul, iar Rr – rezultanta rezistenţelor opuse la tăierea şi desprinderea feliilor de sol este redusă în raport cu centrul rotorului cu cuţite. Prin reducerea forţei de rezistenţă, Ro, în raport cu punctul C de contact al patinei cu solul, se creează în jurul acestui punct momentul Mo, iar reacţiunile totale ale rotorului în acest punct vor fi: zopr RZZ şi
Momentul Mo este dat de relaţia: xopr RXX
ozooxoro sRhRM (5.9)
Prin reducerea forţei de rezistenţă Rr în raport cu centrul rotorului cu cuţite se creează în jurul acestui punct momentul MRr care este egal cu momentul Mr dar de sens contrar, cele două momente anulându-se reciproc. Practic în centrul rotorului cu cuţite va acţiona forţa Rr, prin cele două componente ale sale: Rxr care va avea un

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
33
efect de împingere a tractorului şi Rzr care va micşora reacţiunea solului asupra patinei, Zr.
Din ecuaţiile de echilibru dinamic ale rotorului cu cuţite şi cadru, în baza figurii 5.5 rezultă relaţiile:
xrrxrxrtr RXFFF 123 (5.10)
zrrzrzrzr RZrGFFF 231 (5.11)
în care: Ftr este forţa de tracţiune exercitată de tractor asupra rotorului iar Fzr – reacţiunea verticală a rotorului asupra tractorului.
5.2.3 Cercetări teoretice privind dinamica tăvălugului cu pinteni În procesul deplasării în lucru sub acţiunea greutăţii (sarcinii) Gtv care apasă
asupra tăvălugului (fig. 5.6) şi datorită mişcării de translaţie a maşinii tăvălugul rulează pe sol, pintenii intră în sol la o adâncime ap, iar mantaua tasează solul până la adâncimea am [ 24, 33, 35, 95, 107, 132].
Fig.5.6 Dinamica interacţiunii dintre tăvălugul cu pinteni şi sol în procesul de lucru:
a – schema forţelor care acţionează asupra tăvălugului; b –schema concentrată a forţelor care acţionează asupra tăvălugului;
În figura 5.6 s-au făcut următoarele notaţii: Ftt – forţa de tracţiune la axul tăvălugului; Gtv – sarcina care apasă asupra tăvălugului; Rtm – rezistenţa la mărunţire şi apăsare opusă de sol mantalei tăvălugului, care se descompune în componentele orizontală Rxtm şi verticală Rztm; Rtp – rezultanta rezistenţelor la apăsare opusă de sol pintenilor, care se descompune în componentele orizontală Rxtp şi verticală Rztp; Mf – momentul de frecare din lagărele tăvălugului (pentru lagăre cu rostogolire are valori mici şi în calculele ulterioare se neglijează); rm – raza mantalei tăvălugului; rr – raza exterioară de dispunere a pintenilor;
Pentru studiul dinamicii tăvălugului cu pinteni se înlocuieşte acţiunea forţelor care acţionează asupra mantalei Rtm şi asupra pintenilor Rtp cu rezultanta Rtv a tăvălugului (fig. 5.6, b) care se descompune în componentele orizontală Rxt (plasată la distanţa htv faţă de suprafaţa solului) şi verticală Rzt (plasată la distanţa stv faţă de axa verticală a tăvălugului).
În figura 5.7 se prezintă modelul dinamic echivalent al tăvălugului cu pinteni, în care este momentul rezistent rezultant dintre momentul rezistent la
rostogolirea mantalei (tvztrtv sRM
mztmrm sRM ) şi a pintenilor ( ), adică
. pztprp sRM
rprm MM rtvM

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
34
Fig.5.7 Schema dinamică echivalentă a tăvălugului cu pinteni
Conform figurii 5.6 b şi neglijând momentul de frecare din lagăre se poate
scrie relaţia:
mxttvmmxttvzt rRharRsR )( (5.15)
Valoarea forţei de rezistenţă totală la rularea tăvălugului pentru mărunţirea şi
tasarea solului este dată de relaţia [24, 132]:
zttvm
tvxt Rf
r
sR (5.16)
Forţa de tracţiune aplicată la axul tăvălugului cu pinteni este dată de relaţia:
zttvxttt RfRF (5.17)
5.3 CERCETĂRI TEORETICE PRIVIND DINAMICA AGREGATULUI PENTRU PREGĂTIT PATUL GERMINATIV ACPG-3 Schema de principiu a forţelor exterioare care acţionează asupra agregatului
pentru pregătit patul germinativ ACPG-3 în procesul de lucru, la deplasarea pe teren orizontal cu viteză constantă, este reprezentată în figura 5.8, unde sunt figurate şi reacţiunile din legăturile (cuplele) cilindrice ale barelor (tiranţilor) mecanismului de suspendare al tractorului.
În figura 5.8 s-au făcut următoarele notaţii: Gm – forţa de greutate a maşinii în ansamblu; Rxce şi Rzce – forţele echivalente a interacţiunii cu solul a celor 4 cuţite de afânare sau decompactare, aplicate în punctul A de coordonate lc faţă de linia de referinţă şi hc faţă de nivelul solului.(Rxce = 4Rxc şi Rzce = 4Rzc); Rxr şi Rzr – forţele rezultante de rezistenţă opuse la tăierea şi desprinderea părţilor de sol, creată datorită celor za cuţite de pe rotor ce acţionează la un moment dat în sol (aplicate în punctul B de coordonate lr faţă de linia de referinţă şi hr faţă de nivelul solului); Xr şi Zr – reacţiunile echivalente a interacţiunii cu solul a patinelor de limitare a adâncimii rotorului şi a oblonului de nivelare; Mr – momentul de torsiune transmis de priza de putere a tractorului rotorului cu cuţite, care prin echivalare este anulat de momentul rezistent al rotorului MRr;
Asupra rotorului cu cuţite, în punctul C de contact dintre patină şi sol acţionează şi momentul Mro creat de rezistenţa opusă de oblon la nivelarea solului. Asupra tăvălugului acţionează şi momentul de rezistenţă la rulare Mrtv
Rxt şi Rzt sunt forţele echivalente a interacţiunii cu solul a tăvălugului cu pinteni, aplicate în punctul D de coordonate lt faţă de linia de referinţă şi ht faţă de nivelul solului.; F1x şi F1z - forţele din cupla de legătura (cupla cilindrică) a barei superioare (tirantului central) al mecanismului de suspendare al tractorului;F23x şi

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
35
F23z- reacţiunile însumate din legăturile (cuplele) cilindrice ale barelor inferioare ale mecanismului de suspendare al tractorului.
Fig.5.8 Modelul dinamic echivalent al agregatului pentru pregătit patul germinativ,
ACPG-3 la deplasarea în lucru, pe teren orizontal, cu viteză constantă Din ecuaţiile de echilibru ale maşinii de pregătit terenul în vederea
însămânţării în baza modelului dinamic din figura 5.8 se determină următoarele forţe: sarcina verticală transmisă prin articulaţiile barelor mecanismului de suspendare al tractorului: ; forţa de tracţiune (de rezistenţă) la deplasarea în lucru a zzz FFF 231 maşinii, adică se determină bilanţul de tracţiune al maşinii, adică: . xxt FFF 123
Forţele de tracţiune din punctele de cuplare a maşinii la tractor F1x, respectiv F23x, se determină din ecuaţii de momente scrise în raport cu punctul inferior, respectiv superior, de cuplare, rezultând relaţiile:
hMMlGlRhhR
hXlZRhhRlRhhRF
rotvmmtzttixt
irrrzrrixrczceicxcex
/])(
)()()([1
(5.20)
hMMlGlRhhhRhhX
lZRhhhRlRhhhRF
rotvmmtzttixtir
rrzrrixrczceicxcex
/])()(
)()()([23
(5.21)
Forţa de apăsare, Fz, exercitată de agregat asupra tractorului este:
ztzrzcemzzz RZrRRGFFF 231 (5.22)
Bilanţul de tracţiune al agregatului la deplasarea în lucru pe teren orizontal cu
viteză constantă, este:
xtrxrxcexxt RXRRFFF 123 (5.23)
Relaţiile analitice de mai sus reprezintă modelele matematice ale dinamicii şi
tracţiunii agregatului de pregătit patul germinativ la deplasarea în lucru, cu viteză constantă, pe teren orizontal. Cu aceste modele matematice se poate simula pe calculator comportarea dinamică şi la tracţiune a maşinii.

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
36
5.4 DINAMICA GENERALĂ A SISTEMULUI TRACTOR-AGREGAT COMBINAT PENTRU PREGĂTIT PATUL GERMINATIV 5.4.1 Stabilitatea longitudinală a tractorului cu maşina în poziţie de lucru pe teren orizontal Schema forţelor exterioare care acţionează asupra sistemului tractor - maşină
agricolă pentru pregătirea terenului în vederea însămânţării (ACPG-3), purtată în spate, în poziţie de lucru, pe teren orizontal, este reprezentată în figura 5.9.
Semnificaţia forţelor care acţionează asupra maşinii şi a distanţelor menţionate în schemă (v. subcap. 5.3 şi fig. 5.8) este următoarea: Gm - forţa de greutate a maşinii în ansamblu; Rxce şi Rzce – forţele echivalente a interacţiunii cu solul a celor 4 cuţite de afânare sau decompactare; Rxr şi Rzr – forţele rezultante de rezistenţă opuse la tăierea şi desprinderea părţilor de sol; Xr şi Zr – reacţiunile echivalente a interacţiunii cu solul a patinelor de limitare a adâncimii rotorului şi a oblonului de nivelare; Mr – momentul de torsiune transmis de priza de putere a tractorului rotorului cu cuţite¸Rxt şi Rzt - forţele echivalente a interacţiunii cu solul a tăvălugului cu pinteni,. Asupra tăvălugului cu pinteni acţionează şi momentul de rezistenţă la rulare Mrtv;
Fig.5.9 Schema dinamicii sistemului tractor (4x4)- agregat combinat pentru
pregătit patul germinativ (ACPG-3), în lucru pe teren orizontal
Semnificaţia forţelor exterioare care acţionează asupra tractorului este următoarea [83, 86, 95, 99,131]: Gt - greutatea tractorului; Fm1 şi Fm2 - forţele tangenţiale de tracţiune dezvoltate de tractor prin aderenţa roţilor cu solul ; Z1 şi Z2 - sarcinile normale pe puntea din faţă şi spate; Rr1 şi Rr2 - rezistenţele la rulare pe sol ale roţilor punţilor tractorului; Mr1 şi Mr2 – momentele de rezistenţă la rulare ale roţilor Valorile sarcinii normale pe punţile din faţă şi spate ale tractorului, Z1 şi Z2 :
L
MMhRL
LRhRLRZhRLRLGaGZ
rtvrotxt
tztrxrrzrrcaxceczcemmct
)(
1 (5.24)

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
37
L
MMhRLLRhRL
LLRZhRLLRLLGaLGZ
rtvrotxttztrxr
rzrrcaxceczcemmct
)(
)()()()()(2
(5.25)
Reacţiunea normală totală Zt:
ztzrrzcemtt RRZRGGZZZ 21 (5.26)
Din ecuaţiile de echilibru ale forţelor care acţionează asupra tractorului şi maşinii pe direcţia de deplasare se obţine bilanţul de tracţiune al tractorului, exprimat prin relaţia:
xrrxtxcerrmmm RXRRRRFFF 2121 (5.32)
La deplasarea în lucru pe teren orizontal nu apar probleme privind stabilitatea longitudinală, deoarece chiar dacă roţile din faţă ale tractorului se desprind de sol, tractorul se va sprijini mai departe pe roţile punţii din spate şi pe organele de lucru ale maşinii de pregătit patul germinativ.
5.4.3 Stabilitatea longitudinală a tractorului la urcarea pe pantă cu maşina în poziţie de lucru
Fig.5.11 Schema forţelor exterioare care acţionează asupra sistemului tractor-maşină, în
poziţie de lucru, la urcare cu viteză constantă pe panta longitudinală
Ecuaţia bilanţului de tracţiune a agregatului la urcare, cu viteză constantă, pe panta longitudinală, care are următoarea formă generală:
sin)(2121 mtxrrxtxcerrmmm GGRXRRRRFFF (5.37)
Cunoscând că:
111 ZfRr ; ; 222 ZfRr )( 2121 ZZfRRR trrrt ;
zttvxt RfR ; rpr ZX (5.38)
Reacţiunea totală asupra punţilor tractorului, Zt , este:
ztzrrzcemtt RRZRGGZZZ cos)(21 (5.39)

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
38
Relaţia (5.32) devine:
sin)(
]cos)[(21
mtxrrpzttvxce
ztzrrzcemttmmm
GGRZRfR
RRZRGGfFFF (5.40)
care reprezintă ecuaţia bilanţului de tracţiune al tractorului în agregat cu maşina de pregătit patul germinativ ACPG-3, la urcarea pe panta longitudinală, cu viteză constantă, în lucru .
Având în vedere că momentele de rezistenţă la rularea tractorului şi 1rM 2rMse neglijează, reacţiunile normale Z1 şi Z2 la punţile tractorului sunt date de relaţiile:
L
MMhRLRhRLRZL
hRLRhGLGhGaGZ
rtvrotxttztrxrrzrr
caxceczcemmmmctct
)(
sincossincos1
(5.41)
L
MMhRLLRhRLLRZhRLLRL
hGLLGhGaLGZ
rtvrotxttztrxrrzrrcaxceczce
mmmmctct
)()()()(
sin)(cossin)(cos2
(5.42)
Din analiza expresiilor celor două reacţiuni, Z1 şi Z2, se observă că o parte din componentele rezistenţelor opuse de sol organelor de lucru ale maşinii şi greutăţii acesteia contribuie la scăderea sarcinii pe puntea faţă şi la creşterea corespunzătoare a sarcinii pe puntea spate, existând şi componente care încarcă puntea faţă şi descarcă puntea spate. Reacţiunea normală totală Zt asupra punţilor tractorului se determină cu relaţia:
ztzrrzcemtt RRZRGGZZZ coscos21 (5.43)
Variaţia sarcinii dinamice totale tZ pe punţile tractorului se determină cu
relaţia: ztzrrzcemttt RRZRGGZZ coscos (5.44)
Rezultă, astfel, că în timpul deplasării forţele exterioare ce acţionează asupra maşinii purtate contribuie la creşterea sarcinii aderente a tractorului, cu tracţiune pe ambele punţi, cu valoarea Zt.
Stabilitatea longitudinală în mişcare (maniabilitatea) este asigurată dacă pe rotile de direcţie (rotile punţii din fată) apasă o sarcină de cel puţin 20% din greutatea statică a tractorului, adică dacă Z1 0,2Gt [83].
Stabilitatea longitudinală la răsturnare reprezintă capacitatea sistemului de a nu se răsturna în plan longitudinal şi este asigurată dacă pe rotile de direcţie (rotile punţii din fată) apasă o sarcină, adică dacă Z1 0 [83]. Trebuie menţionat că la deplasarea în lucru în urcare pe panta longitudinală, nu apar probleme privind stabilitatea longitudinală la răsturnare, deoarece chiar dacă roţile din faţă ale tractorului se desprind de sol, tractorul se va sprijini mai departe pe roţile punţii din spate şi pe organele de lucru ale maşinii de pregătit patul germinativ [83, 86, 131].
5.4.4 Stabilitatea longitudinală a tractorului cu maşina în poziţie de transport 5.4.4.2 Stabilitatea longitudinală a tractorului la urcarea pe pantă cu maşina în poziţie de transport Stabilitatea longitudinală a tractorului trebuie verificată la urcarea pe pantă cu
maşini purtate în spate, aflate în poziţie de transport.

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
39
Fig. 5.13 Schema forţelor exterioare care acţionează asupra sistemului tractor maşină
purtată în spate, în poziţie de transport, la urcare pe panta longitudinală
Reacţiunile Z1 şi Z2 pe punţile faţă respectiv spate ale tractorului exprimate prin relaţiile:
L
MMhGLGhGaGZ rrmmmmctct 21
1sincossincos
(5.48)
L
MMhGLLGhGaLGZ rrmmmmctct 21
2sin)(cossin)(cos
(5.49)
Stabilitatea longitudinală la răsturnare reprezintă capacitatea sistemului de a
nu se răsturna în plan longitudinal şi este asigurată dacă pe rotile de direcţie (rotile punţii din fată) apasă o sarcină, adică dacă Z1 0 [83]. Înlocuind expresia momentului total de rezistenţă la rulare la urcarea pantei
rGGfMMM mttrtrr cos)(21 , în care r este raza roţilor motoare egale ale
celor două punţi rezultă unghiul critic cr , la urcarea pantei:
'
)(
mmct
mttmmctcr
hGhG
rGGfLGaGtg
(5.52)
Stabilitatea longitudinală în mişcare (maniabilitatea) este asigurată dacă pe rotile de direcţie (rotile punţii din fată) apasă o sarcină de cel puţin 20% din greutatea statică a tractorului, adică dacă Z1 0,2Gt [83].
Ecuaţia bilanţului de tracţiune al tractorului în transport, cu maşina purtată în spate, la urcare cu viteză constantă, are următoarea formă:
sin)(2121 mtrrmmm GGRRFFF (5.54)
Cunoscând că: cos)()( 2121 mtttrrrt GGfZZfRRR , rezultă:
sin)(cos)(21 mtmttmmm GGGGfFFF (5.55)

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
40
5.5 SIMULAREA PE CALCULATOR A DINAMICII SISTEMULUI TRACTOR- MAŞINĂ PENTRU PREGĂTIREA TERENULUI PENTRU SEMĂNAT
5.5.1 Aspecte generale Comportarea dinamică a diferitelor tipuri de sisteme tractor-maşină agricolă pentru pregătirea terenului pentru semănat este descrisă de modele matematice, rezultate din ecuaţiile de mişcare şi de echilibru ale sistemelor. Simularea dinamicii sistemului s-a realizat pentru varianta deplasării sistemului pe teren orizontal, cu viteză constantă. În lucrare se simulează pe calculator variaţia forţele de tracţiune (F1x, F2x, F3x) şi apăsare (F2z, F3z) care apar în tiranţii mecanismului de suspendare al tractorului, a forţei totale de rezistentă la tracţiune (Ft) opusă de maşina agricolă, a reacţiunilor normale ale solului (Zr) asupra sistemelor de limitare a pătrunderii în sol a maşinii, toate în funcţie de variaţia adâncimii de lucru.
5.5.2 Simularea dinamicii sistemului tractor maşină de pregătit patul germinativ În cele ce urmează se prezintă modelul dinamic pentru sistemul format din
tractorul de mare putere A1800-AM şi maşina de pregătit patul germinativ, ACPG-3. Schema solicitărilor care apar în procesul de lucru al sistemului, necesară pentru realizarea modelului dinamic, este prezentată în figura 5.14.
Pentru asigurarea similitudinii modelului dinamic cu modelul folosit la investigarea experimentală între tractor şi maşina de lucru se reprezintă rama tensometrică (RT) folosită la încercări pentru măsurarea forţelor de rezistenţă la tracţiune opuse de maşină în lucru. Deoarece maşina ACPG-3 este construită simetric faţă de axa longitudinală, pentru simplificarea modelului s-a considerat că solicitările care apar în lucru asupra maşinii sunt distribuite simetric faţă de axă.
Deoarece variaţia adâncimii de lucru pentru rotorul cu cuţite este de doar 80 mm, iar poziţia tiranţilor tractorului este definită de această adâncime, se poate consideră ca invariabilă poziţia tiranţilor în timpul lucrului, cu suficientă precizie.
Fig. 5.14 Schema solicitărilor maşinii ACGP-3 în timpul procesului de lucru (model dinamic) Forţele de tracţiune (F1x, F2x, F3x) şi apăsare (F2z, F3z), forţa totală de rezistentă
la tracţiune (Ft) opusă de maşina agricolă, reacţiunea normală a solului (Zr) asupra patinei maşini, se determină prin rezolvarea sistemului de ecuaţii:

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
41
0231 xxxrrxcxt FFRXRR
0231 zzzrrztzcm FFRZRRG
rtztrtxt
gmmxrrrrxrzrrzrrczcrcxcx
xRzR
xGzXzRxZRxRzRhF
)(1
111 tgFF xz (5.58)
xxx FFF 3223
zzz FFF 3223
22323 tgFF xz
rpsr ZX
Valorile parametrilor constanţi (date de intrare) ai sistemului de deplasare pe un teren orizontal şi cu viteză constantă sunt prezentate în tabelul 5.1:
Tabelul 5.1 Nr. crt.
Parametrul Valoare
1 Gm – greutatea maşinii, inclusiv a ramei tensometrice Gm=26500 N 2 xgm – coordonata orizontală a Gm faţă de punctul inferior de cuplare xgm=1181 mm 3 zgm – coordonata verticală a Gm faţă de punctul inferior de cuplare zgm=224 mm 4 xrc – coordonata orizontală a Rc faţă de punctul inferior de cuplare xrc=148 mm
5 zrc – coordonata verticală a Rc faţă de punctul inferior de cuplare (ac – adâncimea de lucru a cuţitelor de afânare)
zrc=520 mm + ac
6 xrt – coordonata orizontală a Rtv faţă de punctul inferior de cuplare xrt=1731 mm
7 zrt – coordonata verticală a Rtv faţă de punctul inferior de cuplare (ac – adâncimea de lucru a cuţitelor de afânare)
zrt=466 mm
8 xzr – coordonata orizontală a Zr şi Rr faţă de punctul inferior de cuplare xzr=780 mm 9 zxr – coordonata verticală a Xr faţă de punctul inferior de cuplare zxr=502 mm 10 zrr – coordonata verticală a Zr faţă de punctul inferior de cuplare zrr=325 mm 11 h – distanţa pe verticala între punctele inferior şi superior de cuplare h = 685 mm
12 ps - coeficientul de frecare dintre patină şi sol ps =0,2
13 1 - unghiul tirantului central cu orizontala 1 =4,860
14 2 - unghiul tiranţilor laterali cu orizontala 2 =3,540
S-au considerat ca variabili următorii parametri: - forţa rezultantă Rc creată de cuţitele pentru afânare în lucru , prin cele
două componente Rxc şi Rzc; - zrc – coordonata verticală a Rc faţă de punctul inferior de cuplare
(ac – adâncimea de lucru a cuţitelor de afânare), zrc=520 mm + ac; Considerând dependenţa liniară componentelor forţei de rezistenţă opusă de
cuţite faţă de adâncimea de lucru a cuţitelor, ac se poate scrie relaţia:
ccacxc aakR 96000 , [N] (5.61)
unde kac=Rzcmax/acmax=96000 N/m Componenta Rzc va fi dată de relaţia:
ccaczc atgakR 34944 , [N] (5.62)
în care ac=0,1…0,25 m. - forţa rezultantă Rr creată de rezistenţele opuse la mărunţirea şi afânarea solului de către rotorul cu cuţite, prin componentele Rxr şi Rzr. Pentru a putea exprima dependenţa dintre forţa rezultantă Rr datorată rezistenţelor opuse la mărunţirea şi afânarea solului de către rotorul cu cuţite şi adâncimea de lucru a cuţitelor, ac, se porneşte de la puterea maximă consumată pentru mărunţire şi afânare corespunzătoare adâncimii maxime.

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
42
Se poate considera ca o valoare maximă a puterii consumate prin frezare pentru o adâncime de 12 cm , valoarea de 30 kW/m lăţime de lucru [24, 94]. Pentru agregatul analizat la care lăţimea de lucru este de 3 m rezultă puterea maximă pentru frezare, Pfrmax, este: Pfrmax= 90 kW
Asupra rotorului cu cuţite acţionează forţele şi momentele prezentate în fig.5.5
Rr = Rxr + Rzr (5.63)
în care Rxr = 0,67 Fp şi Rzr = 0,45 Fp la frezarea în soluri tari şi Rxr = 0,88 Fp şi Rzr = 0,60 Fp la frezarea în soluri uşoare. Fp este forţa periferică dată de relaţia:
Fp=Mr/r, [N] (5.66) unde r este raza exterioară a rotorului cu cuţite, r=0,25m.
Valoarea maximă a forţei periferice Fp este cea corespunzătoare momentului maxim dat de relaţia:
min
maxmax
30
rr n
PM
(5.67)
unde nr este turaţia rotorului cu cuţite (nrmin=355 rot/min, pentru efectuarea lucrului pe terenuri nearate).
Considerând dependenţa liniară a forţei periferice Fp de adâncimea de lucru a rotorului cu cuţite, ar, pornind de la valoarea maximă a celor două, se poate scrie relaţia:
rrarp aakF 95500 , [N] (5.68)
unde kar=Fpmax/armax=80698,3 N/m, ar =0,04…0,12 m Pentru determinarea forţelor Rrxmax şi Rrzmax se folosesc relaţiile de la frezarea
în soluri uşoare deoarece în cazul nostru în faţa rotorului cu cuţite avem cuţitele de afânare.
rrpxr aaFR 5,710143,8069388,088,0 (5.69)
rrpzr aaFR 484186,06,0 (5.70)
- forţa rezultantă Rtv datorată rezistenţelor opuse de sol la deplasarea tăvălugului, prin componentele Rxt şi Rzt; Forţa de rezistenţă opusă în lucru de tăvălug va fi invers proporţională cu adâncimea ac a rotorului cu cuţite. De aici rezultă că componenta verticală Rzt va avea valoarea maximă când adâncimea ac este minimă, deci se poate scrie relaţia:
rr
atvzt aa
kR
920 , [N] (5.71)
unde 92004,023000minmax aRk ztatv Nm.
S-a considerat valoarea maximă Rzmax=Gma=23000 N cea corespunzătoare preluării întregii greutăţi a agregatului( fără rama tensometrică) de către tăvălug. Pentru determinarea componentei orizontale Rxt se foloseşte schema din figura 5.7 şi relaţia:
fRfGr
lGFR zttttxt (5.72)
care reprezintă formula simplificată a rezistenţei la rulare. Pentru modelul considerat coeficientul f=0,6 cu variaţii mici cu adâncimea ar. Rezultă dependenţa dintre Rxt şi adâncimea ar se exprimă prin relaţia:
rrr
atvxt aa
fa
kR
5526,0
920 , [N] (5.73)
- adâncimea de lucru a cuţitelor de afânare, ac = 10…25 cm;

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
43
- adâncimea de lucru a rotorului orizontal cu cuţite, ar = 4…12 cm;
Simularea dinamicii pentru modelul considerat s-a efectuat cu ajutorul programului Maple 12.
5.5.3 Interpretarea grafică a rezultatelor obţinute în urma simulării dinamicii sistemului (fig. 5.15...5.21)
.
Fig. 5.15 Variaţia forţei din tirantul central al tractorului în funcţie de adâncimea de lucru ac a cuţitelor de afânare şi de adâncimea de lucru
ar [m] a rotorului cu cuţite
Fig. 5.16 Variaţia forţei rezultante din tiranţii laterali ai tractorului în funcţie de adâncimea
de lucru ac a cuţitelor de afânare şi de adâncimea de lucru ar a rotorului cu cuţite
Fig. 5.17 Variaţia forţei rezultante din tiranţii laterali ai tractorului în funcţie de adâncimea
de lucru a cuţitelor de afânare şi de adâncimea de lucru a rotorului cu cuţite
Fig. 5.18 Variaţia forţei rezultante de apăsare Fz în punctele de cuplare ale maşinii la tractor în funcţie de adâncimea de lucru a cuţitelor de
afânare şi a rotorului cu cuţite
Din analiza graficelor din fig. 5.15, 5.16, 5.17 se constată că forţa de compresiune din tirantul central, forţele de tracţiune din tiranţii laterali, precum şi forţa de tracţiune rezultantă, existente datorită rezistenţelor opuse în lucru de maşină, cresc cu creşterea adâncimii de lucru a cuţitelor de afânare şi cu scăderea adâncimii de lucru a rotorului cu cuţite.

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
44
Din analiza graficului din fig. 5.18 se constată că forţa rezultantă de apăsare Fz exercitată de maşină asupra tractorului în timpul lucrului, creşte cu creşterea adâncimii de lucru a cuţitelor de afânare şi cu scăderea adâncimii de lucru a rotorului cu cuţite.
Fig. 5.19 Variaţia forţei de rezistenţă Zr opusă
de sol asupra patinelor de limitare a pătrunderii în sol a rotorului cu cuţite în funcţie de
adâncimea de lucru a cuţitelor de afânare şi a rotorului cu cuţite
Fig. 5.20 Variaţia forţei de rezistenţă la
alunecare Xr opusă de sol asupra patinei, în funcţie de adâncimea de lucru a cuţitelor de
afânare şi a rotorului cu cuţite
Din analiza graficului din fig. 5.19 se constată că forţa de reacţiune Zr a solului
asupra patinei de limitare a pătrunderii în sol a rotorului cu cuţite creşte cu creşterea adâncimii de lucru a rotorului cu cuţite. De asemenea, se poate observa şi o creştere sensibilă a aceleiaşi forţe cu creşterea adâncimii de lucru a cuţitelor de afânare.
Fig. 5.21 Variaţia momentul de torsiune la rotorul cu cuţite, Mr, în funcţie de adâncimea de lucru a rotorului cu cuţite şi de adâncimea de lucru a cuţitelor de afânare
Din grafic ( fig. 5.21) se observă creşterea liniară a momentului Mr la rotorul cu
cuţite cu creşterea adâncimii de lucru a rotorului. Variaţia momentului de torsiune de la rotorul cu cuţite este nesemnificativă în
raport cu adâncimea de lucru a cuţitelor de afânare.

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
45
CAPITOLUL 6
CERCETĂRI EXPERIMENTALE PRIVIND DINAMICA ŞI ENERGETICA SISTEMELOR TRACTOR MAŞINĂ AGRICOLĂ UTILIZATE LA PREGĂTIREA
TERENULUI ÎN VEDEREA ÎNSĂMÂNŢĂRII
6.1 SISTEMUL SUPUS CERCETĂRII EXPERIMENTALE 6.1.1 Tractorul utilizat la cercetările experimentale
Pentru executarea încercărilor s-a folosit tractorul de mare putere din clasa de putere A1800 AM (fig.6.1), fabricat la S.C. MAT S.A. Craiova, existent în dotarea INMA Bucureşti. Principalele caracteristici tehnice ale tractorului sunt [140, 145, 154]: dimensiuni de gabarit (lungime x lăţime x înălţime): 6340x2500x3800 mm; masa tractorului: constructivă: 8860 kg; de exploatarea max.: 10675 kg;
alimentat, în stare de exploatare, nelestat: 9715 kg (pe puntea din faţă: 5440 kg;pe puntea din spate: 4275 kg ) ampatamentul: 3000 mm;
ecartamentul: la puntea faţă şi spate: 1900 mm; puterea motorului: 132,4 kW.
Fig. 6.1 Tractorul A1800 AM folosit la încercări,
6.1.2 Maşina agricolă utilizată la cercetările experimentale Maşina agricolă care face obiectul cercetării este agregatul combinat pentru
pregătit patul germinativ ACPG-3 cu lăţimea de lucru de 3 m. (fig. 6.2). [139, 145, 154].
Fig. 6.2 Agregatul combinat pentru pregătit patul germinativ ACPG-3,

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
46
folosit pentru încercările experimentale
Agregatul combinat ACPG-3 este destinat pentru executarea lucrărilor de pregătire a patului germinativ la o singură trecere pe teren arat bolovănos sau pe mirişte. Agregatul lucrează cu tractoare pe roţi de 180-240 CP, prevăzute cu ridicătoare hidraulice din categoria a III-a STAS 11022 şi este prevăzut cu posibilitatea de ataşare a unui echipament de semănat cereale păioase concomitent cu pregătirea patului germinativ.
Încercările au fost efectuate în condiţii de umiditate scăzută în sol (mirişte), pe terenurile Institutului Naţional pentru Maşini Agricole (INMA) Bucureşti în perioada octombrie-noiembrie 2008, pe agregatul prezentat anterior. Solurile pe care s-au făcut încercările prezintă caracteristicile solurilor din partea de sud a României. 6.2 OBIECTIVELE ŞI PROGRAMUL ÎNCERCĂRILOR EXPERIMENTALE
Cercetările experimentale referitoare la dinamica şi energetica sistemului tractor-maşină de pregătit patul germinativ (A1800-AM+ACPG3) s-au desfăşurat conform programului din figura 6.5 şi au ca obiective principale următoarele: determinarea forţelor care acţionează în punctele de cuplare a maşinii la
tractor (forţe de tracţiune şi forţe de apăsare); determinarea momentului de torsiune transmis la maşină prin arborele prizei
de putere a tractorului; determinarea momentelor la roţile motoare prin măsurarea momentelor de
torsiune la arborii cardanici de antrenare a punţilor tractorului; determinarea vitezelor unghiulare ale roţilor motoare şi arborelui prizei de
putere prin măsurarea turaţiilor la arborii cardanici de antrenare a punţilor tractorului şi la arborele prizei de putere; determinarea vitezei reale de deplasare a sistemului folosind roata a 5-a analiza factorilor constructivi, funcţionali şi de lucru ai maşinii asupra
parametrilor dinamici şi energetici ai sistemului tractor-maşină; verificarea modelelor dinamice şi matematice elaborate în cercetarea teoretică
(la simularea pe calculator) în vederea validării şi completării acestora. Pentru realizarea obiectivelor principale menţionate este necesară
parcurgerea următoarelor etape: elaborarea unei metode şi a unui sistem de investigare experimentală, care să
permită determinarea, prelucrarea şi analiza parametrilor şi mărimilor care caracterizează comportarea dinamică şi energetică a sistemului studiat;
alegerea aparaturii şi echipamentelor de investigaţie experimentală în concordanţă cu obiectivele stabilite prin programul de investigare experimentală;
achiziţionarea, prelucrarea şi interpretarea rezultatelor experimentale şi elaborarea de concluzii referitoare la comportarea dinamică şi energetică a sistemului tractor-maşină de lucru analizat.
Pentru realizarea obiectivelor cercetărilor experimentale este necesară determinarea, directă sau indirectă a următorilor parametri: forţele din cuplele de legătură (de apăsare şi de tracţiune) dintre tractor şi
maşină; momentul de torsiune transmis maşinii prin arborele prizei de putere; momentele de torsiune la roţile punţilor motoare; vitezelor unghiulare ale roţilor punţilor tractorului şi ale arborelui prizei de
putere;

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
47
viteza reală de deplasare a sistemului folosind roata a 5-a
VARIANTE DE ÎNCERCARE
În transport În lucru pe teren şes, nearat, la trei turaţii ale rotorului cu cuţite
TRACTOR A1800-AM+ACPG3
Fig. 6.5 Programul încercărilor experimentale
6.3 APARATURA ŞI METODICA DE INVESTIGARE UTILIZATĂ
6.3.1 Amplasarea în sistem a echipamentelor pentru investigaţia experimentală Alegerea aparaturii de măsurare şi a metodelor de măsurare trebuie să se
facă în concordanţă cu scopul şi importanţa măsurătorilor, în funcţie de locul de amplasare a aparaturii, de variaţia mărimilor măsurate, de precizia de măsurare impusă sau dorită de experimentare.
În procesul de măsurare, principalele etape care se parcurg sunt: obţinerea informaţiei primare despre mărimea de măsurat, de forma unui
semnal electric; prelucrarea informaţiei obţinute; valorificarea informaţiilor (rezultatelor) obţinute sub forma unor înregistrări şi
utilizarea lor în calcule complexe. Pentru măsurarea parametrilor menţionaţi s-a utilizat un echipament modern
de tensometrie cu sistem de achiziţie tip DAP 1200 MICROSTAR LABORATORIES, cu 10 intrări analogice, 10 ieşiri digitale şi frecvenţa de eşantionare120 kHz şi pentru înregistrarea datelor direct pe un computer Laptop 486. Modulul de amplificare este de tip Analog Device 3B18/ 3B20 (fig. 6.6). Sursa de alimentare a fost o baterie de acumulatori cu plumb, cu tensiunea de 12 V.
MtacPF, MtacPS , nac , Mpg , npg ,nr5
Ft c ,Ftd , Fts , Fzd ,Fzs ,MtacPF, MtacPS , nac , Mp , np ,nr5
Pe drum de beton
Pe teren nearat n1t=355
rot/min n2t=390 rot/min
n3t=450 rot/min
v1=4,1 km/h
v2=4,85 km/h
v3=6,41 km/h

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
48
Software-ul existent pe placa de achiziţie permite filtrarea semnalelor primite de la traductoare şi determinarea valorilor minime, maxime şi medii ale acestora.
AMPLIFICATOR
SISTEM DE
ACHIZIŢIE DE
DATE (LAPTOP)
COMPUTER
SENZOR
(TRADUCTOR)
Mărci tensometrice
3B18/3B20 Analog Devices
DAP 1200 (Microstar Laboratories)
486 (Intel)
Fig. 6.6 Schema lanţului de măsurare
În figura 6.7 este prezentată schema de amplasare a traductoarelor şi a circuitelor de măsurare pentru efectuarea determinărilor experimentale pentru sistemul format dintr-un tractor 4x4, cu roti egale, şi maşina de lucru purtată acţionată prin priza de putere, iar în figura 6.8 schema bloc pentru sistemul de preluare, achiziţie şi prelucrarea datelor.
raig ita le
P laca de ch iz it ie
D AP1200Lap top86DX
12V(+ )(- )
8 9
6 ,7
11
10
M A S IN AD E L U C R U
R A M A T E N S O M E T R IC A-tra d u c to r p e n tru m a s u ra re a fo rte i d e tra c tiu n e in tira n tu l ce n tra l- tra d u c to r p e n tru m a s u ra re a fo rte i d e tra c tiu n e in tira n tu l la te ra l s tg .- tra d u c to r p e n tru m a s u ra re a fo rte i d e tra c tiu n e in tira n tu l la te ra l d r.-tra d u c to r p e n tru m a s u ra re a fo rte i d e a p a sa re in tira n tu l la te ra l s tg .- tra d u c to r p e n tru m a s u ra re a fo rte i d e a p a sa re in tira n tu l la te ra l d r.-tra d u c to r p e n tru m a su ra re a m o m e n tu lu i a rb o re lu i p rize i d e p u te re6
78
- tra d u c to r p e n tru m a s u ra re a tu ra tie i a rb o re lu i p rize i d e p u te re-tra d u c to r p e n tru m a s u ra re a m o m e n tu lu i a rb o re lu i ca rd a n ic p u n te fa ta
9 -tra d u c to r p e n tru m a su ra re a m o m e n tu lu i a rb o re lu i ca rd a n ic p u n te sp a te10 -tra d u c to r p e n tru m a s u ra re a tu ra tie i a rb o rilo r ca rd a n ic i p u n te fa ta s i sp a te
-tra d u c to r p e n tru m a s u ra re a tu ra tie i ro tii a 5 -a11
Fig. 6.7 Schema de amplasare a traductoarelor şi a circuitelor de măsurare pentru efectuarea determinărilor experimentale

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
49
Fig. 6.8 Schema bloc pentru sistemul de prelucrare, achiziţie şi prelucrarea datelor
Fig. 6.9 Amplasarea pe tractor a aparaturii de achiziţie şi prelucrare
a datelor măsurate experimental
Instalaţia de achiziţie şi prelucrare a datelor experimentale a fost montată grupat pe o platformă (placă) amplasată pe aripa din stânga a tractorului (fig. 6.9).
Aparatura de măsurare şi modul de amplasare a acesteia pe tractorul laborator se prezintă schematizat în figura 6.10.
Fig. 6.10 Schema de amplasare a aparaturii de măsurare pe agregatul tractor-maşină:
1, 2, 3 – traductoare pentru măsurarea forţelor tracţiune în punctele de cuplare a maşinii la tractor; 4, 5 - traductoare pentru măsurarea forţelor de apăsare în punctele de cuplare a maşinii la tractor; 6, 7 – traductoare pentru măsurarea momentului de torsiune şi turaţiei la arborele prizei de putere;
8, 9 – traductoare pentru măsurarea momentului de torsiune la arborele cardanic de antrenare a punţii motoare faţă, respectiv spate; 10 – traductor pentru măsurarea turaţiei arborilor cardanici de antrenare
a celor două punţi motoare; 11 – traductor pentru măsurarea turaţiei roţii a 5-a; 12 – sistemul de achiziţie şi prelucrare a datelor RT – Ramă Tensometrică pentru măsurarea forţelor de tracţiune şi de
apăsare în punctele de cuplare a maşinii la tractor;
Rama tensometrică RM (fig. 6.10) a fost echipată cu traductoare electrotensometrice pentru măsurarea forţelor de tracţiune (1, 2, 3) şi apăsare (4, 5) în punctele de cuplare a maşinii la tractor. Pentru determinarea momentelor de torsiune a u fost utilizate traductoare electrotensometrice pentru măsurarea momentului de torsiune la arborele prizei de putere (6), a momentului de torsiune la arborele cardanic de antrenare a punţii motoare faţă (8), respectiv spate (9). Pentru

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
50
determinarea turaţiilor arborilor s-au utilizat traductoare electrice cu impulsuri pentru arborele prizei de putere (7), arborii cardanici de antrenare a celor două punţi motoare (10) şi axul roţii a 5-a (11):.
În cadrul cercetărilor experimentale s-au măsurat următorii parametri: forţele de tracţiune şi apăsare în fiecare din cele trei puncte de cuplare ale maşinii agricole la tractor (Ftc, Fts, Ftd, resp. Fzs,Fzd); momentul rezistent la priza de putere a tractorului (Mp); momentul rezistent la arborii cardanici de antrenare a punţilor motoare faţă şi spate ale tractorului (MtacPF,MtacPS); turaţia arborelui prizei de putere (np); turaţia arborilor cardanici de antrenare a punţilor motoare (nacPF=nacPS=nac); turaţia roţii a 5-a (nr5).
6.3.2 Metodica şi aparatura pentru măsurarea forţelor din cuplele de legătură dintre tractor şi maşina agricolă purtată 6.3.2.2 Măsurarea forţelor din cuplele de legătură dintre tractor şi maşina agricolă purtată cu rama tensometrică Pentru a se putea măsura cu precizie şi cu uşurinţă forţele de rezistenţă la
tracţiune pentru orice tip de maşină agricolă purtată cu dispozitiv de cuplare categoria a III-a sau a IV-a spate, s-a realizat rama tensometrică modulată, de legătură, plasată între mecanismul de suspendare al tractorului şi maşina agricolă purtată (fig. 6.11) [39].
Folosind programul de proiectare şi modelare 3D, SOLIDWORKS s-a construit modelul 3D pentru rama tensometrică prezentat în figura 6.11, a) şi b).
Fig. 6.11 Modelul 3D al ramei intermediare pentru măsurarea forţei de rezistenţă la tracţiune a maşinilor agricole purtate
Rama tensometrică [39] este constituită din trei cadre (central 1 şi două
laterale 2, 3) şi cinci suporturi tensometrice care se pot asambla prin organe de asamblare în trei poziţii, făcând astfel posibilă cuplarea acesteia atât la mecanismele de suspendare categoria a III-a şi a IV-a (IV-L şi IV-H) a tractoarelor cât şi la dispozitivele de cuplare ale maşinilor agricole din categoriile respective.
Prototipul ramei tensometrice s-a realizat la întreprinderea de maşini agricole şi tractoare SC MAT SA din CRAIOVA.

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
51
În figura 6.13 este prezentată rama intermediară cu inele tensometrice cuplată la tractor ( A1800-AM) şi la maşina agricolă (ACPG-3) echipată pentru efectuarea încercărilor experimentale.
Fig. 6.13 Rama cu inele tensometrice cuplată la tractor şi la maşina
agricolă echipată pentru efectuarea încercărilor experimentale.
Fig. 6.14
a- Amplasarea mărcilor tensometrice pe inelele elastice b- schema de montare a mărcilor în puntea de măsurare
Rama tensometrică (fig. 6.13) pentru înregistrarea eforturilor orizontale şi verticale din punctele de cuplare cuprinde cinci inele tensometrice care măsoară eforturile. Deoarece suporturile tensometrice laterale precum şi cel central se reglează paralel cu terenul putem să măsurăm, prin mărcile tensometrice montate pe inele elastice ale acestor suporţi, chiar forţele de rezistenţă la tracţiune ale maşinii agricole paralele cu direcţia de deplasare a agregatului, respectiv F2x, F3x la suporturile laterale şi F1x la suportul central. Suporturile tensometrice verticale se fixează perpendiculari pe suporturile tensometrice laterale, iar cu mărcile tensometrice montate pe inele elastice ale acestor suporţi, se vor măsura forţele perpendiculare pe direcţia de deplasare, F2z şi F3z, care reprezintă forţele de apăsare exercitate de maşina agricolă asupra tractorului.
Modul de amplasare a mărcilor tensometrice pe inelele elastice ale suporturilor tensometrice laterale, central şi verticali, precum şi schema de montare a mărcilor în puntea de măsurare sunt prezentate în fig. 6.14 [39].
După montarea mărcilor tensometrice pe inelele elastice s-a efectuat etalonarea pentru fiecare din cele 5 suporturi tensometrice folosind maşina de încercat la tracţiune, iar mărimile rezultate în urma etalonării au fost înregistrate.
6.3.3 Măsurarea momentelor de torsiune la arborii cardanici de la puntea faţă şi spate a tractorului şi a turaţiei acestora 6.3.3.1 Măsurarea momentului de torsiune la arborele cardanic de antrenare a punţii motoare faţă Măsurarea momentelor de torsiune s-a realizat folosind mărci tensometrice,
utilizând ca element elastic de deformare arbori cardanici pe care s-au montat mărcile tensometrice şi colectorul cu contacte alunecătoare. Modul de amplasare a traductoarelor şi a colectorului cu contacte alunecătoare pe arborele cardanic de antrenare a punţii motoare faţă este prezentat schematic în figura 6.22.

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
52
Fig. 6.18 Schema de amplasare a traductoarelor şi a colectorului
cu contacte alunecătoare pe arborele cardanic Legătura electrică între mărcile aplicate pe arborele cardanic în rotaţie şi
instalaţiile de alimentare şi de măsurare se realizează cu ajutorul unui colector cu contacte alunecătoare (fig. 6.18), format din periile a, b, c, d şi inelele colectoare A, B, C, D. În figura 6.20 se prezintă arborele cardanic, echipat cu traductoarele de moment, montat în transmisia punţii motoare faţă a tractorului.
Fig. 6.20 Arborele cardanic cu traductoare de moment montat în
transmisia punţii motoare faţă a tractorului
6.3.3.2 Măsurarea momentului de torsiune la arborele cardanic de antrenare a punţii motoare spate Pentru măsurarea momentului de torsiune la arborele cardanic de antrenare a
punţii din spate s-a realizat o bucşă cu două flanşe la capete, pe care s-au montat mărcile tensometrice şi colectorul cu contacte (figura 6. 21).
Fig. 6.21 Bucşă cu flanşe cu traductoare de moment pentru transmisia punţii motoare spate

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
53
Pentru montarea bucşei respective în transmisia punţii spate s-a folosit un arbore cardanic mai scurt. Modul de montare a bucşei tensometrice cu arborele cardanic în transmisia punţii spate a tractorului este prezentată în figura 6.22.
Fig. 6.22 Modul de asamblare a bucşei cu traductoarele de moment în transmisia punţii motoare spate
6.3.3.3 Măsurarea turaţiei arborilor cardanici de la punţile tractorului
Arborii cardanici de antrenare a celor două punţi motoare primesc mişcarea de acelaşi arbore de ieşire din cutia de viteze, ca urmare vor avea aceeaşi turaţie.
Pentru măsurarea turaţiei celor doi arbori cardanici se va folosi un singur traductor de turaţie cu impulsuri montat pe un arbore cardanic intermediar dintre arborele de ieşire din cutia de viteze şi arborele punţii spate, montajul făcându-se ca în figura 6. 23.
1
2
Fig. 6.23 Montajul traductorului de turaţie în zona arborelui de ieşire din cutia de viteze
1- traductor de turaţie cu impulsuri electrice 2- arbore cardanic intermediar
6.3.4 Măsurarea momentului de torsiune şi a turaţiei arborelui prizei de putere Pentru măsurarea momentului de torsiune la arborele prizei de putere s-a
folosit un traductor tip T4A produs de firma HBM (Hottinger Baldwin Messtechnik) aflat în dotarea INMA Bucureşti. Traductorul are domeniul de măsurare de la 0 la 1 KNm şi este prevăzut la capete cu profil pătrat interior şi exterior de 1”,momentul de torsiune se poate măsura în ambele sensuri, iar transmiterea semnalului se face cu inele colectoare. Traductorul s-a montat între arborele prizei de putere şi arborele cardanic de antrenare a maşinii agricole prin intermediul unor piese intermediare (fig. 6. 24) [150].

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
54
2
3
1
4
Fig. 6.24 Montajul traductorului de moment şi a traductorului de turaţie pe arborele prizei de putere a tractorului
1- traductorul de moment tip T4A produs HBM 2- traductorul de turaţie pentru arborele prizei de putere
3, 4- piese intermediare de legătură
6.3.5 Măsurarea vitezei reale v de deplasare a tractorului Măsurarea vitezei reale v de deplasare a tractorului s-a realizat cu dispozitiv
cu traductor cu impulsuri inductive, de tip „roata a cincia” (fig. 6.25). Schema de principiu a traductorului pentru măsurarea vitezei liniare cu ajutorul unei roţi auxiliare este prezentată în figura 3.42 (v. Cap. 3).
Fig. 6.25 Dispozitivul tip „roata a cincia” şi modul de amplasare la tractor 1 – cadru suport roata 5; 2 - traductor de viteză de deplasare (roata a 5-a).
1
2

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
55
6.4. PRELUCRAREA, ANALIZA ŞI INTERPRETAREA REZULTATELOR EXPERIMENTALE 6.4.1 Prelucrarea datelor experimentale
Cercetările experimentale în diverse condiţii (în lucru şi transport) s-au făcut în conformitate cu programul prezentat în figura 6.5, efectuându-se un număr de 24 probe, câte două probe pentru fiecare din cele 9 variante de lucru şi câte trei probe pentru cele 2 variante în transport.
În cazul agregatului studiat, mărimile care au fost urmărite în timpul cercetărilor experimentale au fost: forţele de tracţiune şi apăsare în fiecare din cele trei puncte de cuplare ale
maşinii agricole la tractor (Ftc, Fts, Ftd, resp. Fzs,Fzs); momentul rezistent la arborele prizei de putere a tractorului (Mp); momentul rezistent la arborii cardanici de antrenare a punţilor motoare faţă şi
spate ale tractorului (MtacPF,MtacPS); turaţia arborelui prizei de putere (np); turaţia arborilor cardanici de antrenare a punţilor motoare (nacPF=nacPS=nac); turaţia roţii a 5-a (nr5).
Toate aceste mărimi au fost determinate pentru adâncimi maxime de lucru ale cuţitelor de afânare de 25 cm, adâncimea de lucru maximă a rotorului cu cuţite de 12cm, trei turaţii diferite ale rotorului cu cuţite şi trei viteze de deplasare diferite.
Semnalele înregistrate şi salvate în memoria calculatorului, în fişiere tip ASCII, au fost prelucrate şi redate de sistemul de achiziţie de date sub forma unor grafice în funcţie de timp (oscilograme). Aceste oscilograme au fost prelucrate, eliminându-se regimurile tranzitorii de lucru (la începerea si terminarea probelor) şi separându-se variaţia fiecărei mărimi măsurate.
În graficele următoare sunt date, pentru exemplificare, înregistrări obţinute pentru variaţia în timp a următorilor parametrii măsuraţi direct: forţa de tracţiune în articulaţiile din dreapta (fig. 6.26), respectiv stânga (fig. 6.26), forţa de tracţiune din tirantul central (fig. 6.26), forţa totală de tracţiune (fig. 6.27) obţinută prin însumarea componentelor de mai sus; forţa de apăsare în articulaţiile din dreapta (fig. 6.28), respectiv stânga (fig. 6.28) şi forţa de apăsare totală (fig. 6.29) obţinută prin însumarea componentelor dinainte; momentul rezistent la arborii cardanici de antrenare a punţilor motoare faţă (fig. 6.30), respectiv spate (fig. 6.31) ale tractorului; momentul la arborele prizei de putere (fig. 6.32),
Forţele de rezistenţă la tracţiune din punctele de cuplare ale maşinii la tractor măsurate cu rama tensometrică
-80000
-60000
-40000
-20000
0
20000
40000
60000
0 2 4 6 8 10 12 14 16 18
Timp [s]
Forţe
le d
e tr
acţiu
ne [N
]
Forţa totală de rezistenţă la tracţiune a maşinii agricole, în lucru
-10000
0
10000
20000
30000
40000
50000
0 2 4 6 8 10 12 14 16 18
Timp [s]
Forţ
a d
e tr
acţ
iune
[N
]
Ft
Ftc Ftd Fts
Fig. 6.27 Variaţia forţei totală de rezistenţă la tracţiune, Ft, a maşinii, în timp
Fig. 6.26 Variaţia forţele de tracţiune din tirantul central Ftc, tirantul lateral dreapta Ftd
şi tirantul stânga Fts, în timp

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
56
Forţele de apăsare exercitate de maşina agricolă asupra tractorului, măsurate în punctele de cuplare
-12000
-10000
-8000
-6000
-4000
-2000
0
2000
4000
6000
0 2 4 6 8 10 12 14 16 18
Timp [s]
Fo
rţe
de
apă
sare
[N
]
Fzd Fzs
Fig. 6.28 Variaţia forţele de apăsare din tirantul
lateral dreapta Fzd, respectiv stânga Fzs
Forţa de apăsare totală exercitată de maşina agricolă asupra tractorului, în timpul lucrului
-12000
-10000
-8000
-6000
-4000
-2000
0
2000
4000
0 2 4 6 8 10 12 14 16 18
Timp [s]
Fo
rţa
de
apăs
are
[N
]
Fz
Fig. 6.29 Variaţia forţei totale de apăsare, Fz, exercitată de maşina agricolă asupra tractorului, în
timpul lucrului
Momentul de torsiune la arborele cardanic de antrenare a punţii motoare faţă
0
200
400
600
800
1000
1200
1400
1600
0 2 4 6 8 10 12 14 16 18
Timp [s]
Mom
ent
tors
iune
[N
m]
Macpf
Fig. 6.30 Variaţia momentului de torsiune la arborele cardanic de antrenare a punţii
motoare faţă, în funcţie de timp
Momentul de torsiune la arborele cardanic de antrenare a punţii motoare spate
-600
-400
-200
0
200
400
600
800
1000
1200
1400
0 2 4 6 8 10 12 14 16 18
Timp [s]
Mom
ent
tor
siune
[N
m]
Macps Fig. 6.31 Variaţia momentului de torsiune la arborele
cardanic de antrenare a punţii motoare spate, în funcţie de timp
Momentul de torsiune la arborele prizei de putere
-200
-100
0
100
200
300
400
500
0 2 4 6 8 10 12 14 16 18
Timp [s]
Mom
ent to
rsiu
ne [N
m]
Mapp Fig. 6.32 Variaţia momentului de torsiune la arborele prizei de putere, în timp

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
57
6.4.2 Analiza şi interpretarea rezultatelor cercetării experimentale referitoare la dinamica sistemului În baza rezultatelor obţinute experimental, prezentate sintetizat în tabelul 6.4
prin valorile medii ale mărimilor înregistrate la încercările sistemului format din tractorul A1800-AM şi ACPG-3 utilizat la pregătirea terenului nearat în vederea însămânţării, se pot analiza influenţele diferiţilor parametri constructivi, funcţionali şi de lucru asupra dinamicii sistemului.
Rezultatul prelucrării pentru sistemul de pregătit patul germinativ A1800-AM + ACPG-3
Tabelul 6.4 Viteza teoretică de deplasare
Vt1=4,1 km/h =1,139 m/s Vt2=4,85 km/h =1,347 m/s Vt3=5,41 km/h =1,503 m/s
Turaţia rotorului cu cuţite [rot/min] Parametrul măsurat
n1t=355 n2t=390 n3t=450 n1t=355 n2t=390 n3t=450 n1t=355 n2t=390 n3t=450
Forţa medie de tracţiune Ft [N]
29578 29598 29625 29190 29214 29245 28900 28926 28962
Forţa medie de apăsare Fz [N]
10622 10636 10654 10358 10374 10395 10160 10178 10202
Momentul mediu la priza Mp [Nm]
214 233 265 253 275 314 282 307 350
Momentul mediu la puntea faţă MtacPF [Nm]
651 651 651 647 648 648 645 645 646
Momentul mediu la puntea spate MtacPS [Nm]
796 797 798 784 785 786 776 776 778
Turaţia arborelui prizei de putere np [rot/min]
960 950 997 937 979 989 990 990 950
Turaţia arborilor cardanici ai punţilor
nacp [rot/min] 333 331 328 394 391 387 440 436 432
Viteza reală deplasare, V [m/s]
1,04 1,045 1,044 1,24 1,245 1,247 1,4 1,39 1,4
Influenţa vitezei de lucru (reală de deplasare) v asupra forţei de tracţiune Ft
pentru trei turaţii diferite ale rotorului cu cuţite este prezentată în figura 6.33.
27600
2780028000
28200
28400
2860028800
29000
29200
2940029600
29800
1 1,2 1,4 1,6 1,8 2
Viteza de lucru, v[m/s]
Forţ
a d
e tra
cţiune, F
t [N
]
nr=450 rot/min
nr=390 rot/min
nr=355 rot/min
Fig. 6.33 Variaţia forţei de tracţiune Ft funcţie de viteza de deplasare a sistemului
pentru trei turaţii ale rotorului cu cuţite
Din analiza graficului se observă că forţa de tracţiune Ft scade cu creşterea vitezei de lucru pentru toate cele trei turaţii ale rotorului cu cuţite. Creşterea forţei de împingere conduce, în final, la scăderea forţei de tracţiune Ft, cu creşterea vitezei.
Influenţa vitezei de lucru, v asupra forţei de apăsare Fz pentru trei turaţii diferite ale rotorului cu cuţite este prezentată prin graficele din figura 6.34.

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
58
940096009800
1000010200104001060010800
1 1,2 1,4 1,6 1,8 2
Viteza de lucru, v [m/s]
Fo
rţa
de
apă
sa
re, F
z [m
/s]
nr=450 rot/min
nr=390 rot/min
nr=355 rot/min
940096009800
1000010200104001060010800
1 1,2 1,4 1,6 1,8 2
Viteza de lucru, v [m/s]
Fo
rţa
de
apă
sa
re, F
z [m
/s]
nr=450 rot/min
nr=390 rot/min
nr=355 rot/min
Fig. 6.34 Variaţia forţei de apăsare Fz funcţie de viteza de deplasare a sistemului
pentru trei turaţii ale rotorului cu cuţite
Din analiza graficului se observă că forţa de apăsare Fz scade cu creşterea vitezei de lucru pentru toate cele trei turaţii ale rotorului cu cuţite.
Variaţia momentului la arborele prizei de putere, Mp, pentru trei turaţii diferite ale rotorului cu cuţite în funcţie de vitezei de lucru, v, a sistemului este prezentată prin graficele din figura 6.35.
0
100
200
300
400
500
600
1 1,2 1,4 1,6 1,8 2
Viteza de lucru, v [m/s]
Mom
entu
l la
priza
de
pute
re, M
p [Nm
]
nr=450 rot/min
nr=390 rot/min
nr=355 rot/min
Fig. 6.35 Variaţia momentului la priză Mp funcţie de viteza de deplasare a sistemului
pentru trei turaţii ale rotorului cu cuţite
Din analiza graficului se observă că momentul la arborele prizei de putere, Mp, creşte cu creşterea vitezei de lucru pentru toate cele trei turaţii ale rotorului cu cuţite.
De exemplu la o creştere a turaţiei rotorului de la 355 la 450 rot/min (creştere de 26,7%) pentru viteza de lucru de 1,04 m/s se produce o creştere a momentului de la 214 la 265 Nm, de aprox. 23,8%.
În figura 6.36 se prezintă variaţia momentului de la arborii cardanici de antrenare a punţilor motoare faţă şi spate MacPF, MacPS funcţie de viteza de deplasare a sistemului, la turaţia rotorului cu cuţite de 450 rot/min.
0
100
200
300
400
500
600
700
800
900
1 1,1 1,2 1,3 1,4 1,5 1,6 1,7 1,8 1,9 2
Viteza de deplasare, v [m/s]
Mo
men
te d
e to
rsiu
ne
arb
ori
car
dan
ici
pu
nţi
[N
m]
Macps[Nm]
Macpf[Nm]
Fig. 6.36 Variaţia momentului de la arborii cardanici de antrenare a punţilor motoare faţă şi
spate MacPF, MacPS funcţie de viteza de deplasare a sistemului

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
59
Din tabelul 6.4 se observă că variaţiile celor două momente de la arborii cardanici ai punţilor motoare faţă şi spate, în funcţie de turaţia rotorului cu cuţite sunt nesemnificative.
În figura 6.37 se prezintă variaţia reacţiunilor verticale la punţile faţă şi spate ale tractorului, ZPF şi ZPS în funcţie de viteza de deplasare a sistemului, la turaţia rotorului cu cuţite de 450 rot/min.
4000042000440004600048000500005200054000560005800060000
1 1,1 1,2 1,3 1,4 1,5 1,6 1,7 1,8 1,9 2
Viteza de deplasare [m/s]
Rea
ţiu
nile
pu
nţi
lor
trac
toru
lui
[N] Zps[N]
Zpf[N]
Fig. 6.37 Variaţia reacţiunilor verticale la punţile faţă şi spate ale tractorului,
ZPF şi ZPS, în funcţie de viteza de deplasare a sistemului
Din analiza graficului se observă o scădere uşoară a reacţiunii verticale, la puntea spate a tractorului, ZPS, şi o creştere a reacţiunii la puntea faţă, ZPF, odată cu creşterea vitezei de deplasare a sistemului.
6.4.3 Analiza şi interpretarea energeticii sistemului utilizat la pregătirea terenului pentru semănat Analiza experimentală a bilanţului de tracţiune al sistemului A1800-AM +
ACPG-3 utilizat la pregătirea terenului pentru semănat presupune determinarea puterii transmisă de tractor pentru tractarea maşinii (puterea de tracţiune Pt) şi a puterii transmisă pentru antrenarea maşinii prin arborele prizei de putere a tractorului (puterea la priză Pp).
Puterea de tracţiune Pt transmisă de tractor pentru tractarea maşinii se determină cu ajutorul relaţiei [83, 86, 131]:
310 vFP tt [kW], (6.4)
în care: Ft este forţa de rezistenţă la tracţiune a maşinii, în N; v – viteza reală a sistemului tractor-maşină de lucru, în m/s (determinată cu ajutorul roţii a cincia din fig.6.25). Puterea Pp transmisă de tractor pentru antrenarea maşinii prin arborele prizei de putere se determină cu relaţia [83, 86, 131]:
310 ppp MP [kW], (6.5)
în care: Mp este momentul de torsiune transmis de arborele prizei de putere, în Nm; 30/pp n - viteza unghiulară a arborelui prizei de putere, în rad/s; np–
turaţia arborelui prizei de putere, în rot/min. Momentul de torsiune la arborele prizei de putere Mp şi turaţia acestuia np s-au determinat experimental cu ajutorul dispozitivului prezentat în fig. 6.24.
Puterea totală Pc (puterea utilă) consumată de maşină în procesul de lucru este dată de suma celor două puteri Pt şi Pp şi se determină cu relaţia:
310)( pptptc MvFPPP [kW], (6.6)

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
60
Puterea efectivă transmisă de motorul tractorului pentru tracţiune Pet se determină cu relaţia:
310
t
t
t
tet
vFPP
[kW], (6.7)
În care: Pt este puterea consumată la tracţiunea maşinii, t - este randamentul
la tracţiune al tractorului, cuprins între limitele 65,055,0 t .
Dacă se cunosc, din măsurători, valoarea momentului de torsiune şi turaţia pentru arborii cardanici de antrenare a celor două punţi motoare, puterea efectivă transmisă de motorul tractorului pentru tracţiune Pet se determină cu relaţia [83, 86]:
31030
ac
cv
tacPStacPF
cv
acPSacPF
cv
acet
nMMPPPP
[kW], (6.8)
Puterea efectivă Pep transmisă de motorul tractorului pentru antrenarea maşinii prin arborele prizei de putere se determină cu relaţia [83, 86, 131]:
310
p
pp
p
pep
MPP
[kW], (6.9)
În care Pp este puterea transmisă de tractor pentru antrenarea maşinii prin arborele prizei de putere; p - este randamentul mecanic al transmisiei prizei de
putere, cuprins între limitele 95,092,0 p .
Puterea efectivă totală Pem transmisă de motorul tractorului pentru tractarea şi acţionarea prin priza de putere a agregatului de pregătit patul germinativ:
310)(
p
pp
t
tepetem
MvFPPP
[kW], (6.10)
sau
310)30
(
p
ppac
cv
tacPStacPFepetem
MnMMPPP
[kW], (6.11)
care reprezintă ecuaţia bilanţului de putere al sistemului la deplasarea în lucru pe teren orizontal cu viteză constantă.
Pe baza datelor rezultate din tabelul 6.4 şi în concordanţă cu relaţiile stabilite mai sus, s-au determinat, prin calcul, componentele bilanţului de putere al sistemului experimental format din tractorul A1800-AM şi maşina ACPG3, redate în tabelul 6.5.
În figura 6.39 este prezentat graficul din care rezultă modul de variaţie a puterii medii necesare pentru tractarea maşinii în funcţie de viteza de lucru. Din grafic se observă creşterea puterii consumate de maşină pentru tractare în procesul de lucru odată cu creşterea vitezei de deplasare.
0
10
20
30
40
50
60
1 1,1 1,2 1,3 1,4 1,5 1,6 1,7 1,8 1,9 2
Viteza de lucru [m/s]
Pu
tere
a co
sum
ată
de
maş
ină
pen
tru
tr
acţi
un
e [k
W]
Fig. 6.39 Variaţia puterii consumate pentru tracţiune Pt funcţie de viteza
de deplasare a sistemului

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
61
Bilanţul energetic al tractorului A1800-AM în agregat cu ACPG-3 (Agregat combinat de
pregătit patul germinativ) Tabelul 6.5
Puteri consumate de maşina de lucru [kW]
Repartizarea puterilor [%]
Puteri efective medii dezvoltate de motor
[kW]
Repartizarea puterilor
efective pe fluxuri [%]
Starea sistemului
Turaţie rotor cu cuţite
[rot/min]
Treapta de
viteză
Viteza reală,
v [m/s]
Pp Pt Pc Pp Pt Pep Pet Pem Pep Pet
I 1,04 27,70 30,81 58,51 47,34 52,66 29,62 52,30 81,92 36,16 63,84
II 1,24 32,50 36,26 68,76 47,26 52,74 34,75 61,24 96,00 36,20 63,80 n3t=450
III 1,40 34,82 40,55 75,37 46,20 53,80 37,24 67,80 105,04 35,46 64,54
I 1,05 23,17 30,93 54,10 42,83 57,17 24,78 52,77 77,55 31,95 68,05
II 1,25 28,24 36,37 64,61 43,71 56,29 30,20 61,79 91,99 32,83 67,17 n2t=390
III 1,39 31,84 40,21 72,05 44,19 55,81 34,06 68,39 102,45 33,24 66,76
I 1,04 21,51 30,88 52,39 41,06 58,94 23,01 53,13 76,13 30,22 69,78
II 1,25 24,85 36,40 61,25 40,57 59,43 26,58 62,20 88,77 29,94 70,06
Deplasarea în lucru
n1t=355
III 1,40 29,26 40,46 69,72 41,97 58,03 31,29 68,84 100,13 31,25 68,75
Pentru a avea o imagine mai clară asupra modului de repartizare a puterii utile
Pc pe cele două fluxuri distincte de putere în tabelul 6.5 s-a calculat şi ponderea procentuală a acestor puteri în cazul sistemului considerat.
Din tabelul 6.5 se observă că puterea consumată de maşină pentru tractare în procesul de lucru are variaţii nesemnificative cu modificarea turaţiei rotorului cu cuţite.
0
10
20
30
40
50
60
1 1,1 1,2 1,3 1,4 1,5 1,6 1,7 1,8 1,9 2
Viteza de lucru [m/s]
Pu
tere
a co
sum
ată
de
maş
ină
pen
tru
tr
acţi
un
e [k
W]
Fig. 6.39 Variaţia puterii consumate pentru tracţiune Pt funcţie de viteza
de deplasare a sistemului
În figura 6.40 este prezentat graficul din care rezultă modul de variaţie a puterii medii necesare pentru acţionarea maşinii prin priza de putere în funcţie de viteza de lucru, la trei turaţii diferite ale rotorului cu cuţite. Din grafic se observă creşterea puterii consumate de maşină pentru acţionarea de la priză, în procesul de lucru, odată cu creşterea vitezei de deplasare si cu creşterea turaţiei rotorului cu cuţite

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
62
0
5
10
15
20
25
30
35
40
45
50
1 1,1 1,2 1,3 1,4 1,5 1,6 1,7 1,8 1,9 2
Viteza de lucru [m/s]
Pu
tere
a co
nsu
mată
de
maş
ină
la p
riza
d
e p
ute
re [
Nm
]nr=450 rot/min
nr=390 rot/min
nr=355 rot/min
Fig. 6.40 Variaţia puterii consumate de maşină pentru acţionarea prin priza
de putere, Pp în funcţie de viteza de deplasare a sistemului, pentru trei rotaţii ale rotorului cu cuţite
Influenţa vitezei de lucru asupra ponderii puterilor de tracţiune Pt şi la
acţionarea prin priză Pp pentru sistemul tractor maşină ACPG3 este prezentată în figura 6.41. În figurile 6.42 şi 6.43 sunt prezentate variaţiile ponderii puterilor consumate la tracţiune, Pt şi la acţionarea prin priză, Pp, în funcţie de viteza de lucru a sistemului, la turaţia rotorului cu cuţite de 390 rot/min, respectiv 355 rot/min.
52,66 52,7453,80
52,2053,36
47,2646,20
47,8046,64
47,34
42
44
46
48
50
52
54
56
1,04 1,24 1,4 1,67 1,93 Viteza de lucru [m/s]
Po
nd
ere
pu
teri
[%
]
Puterea consumată pentru tracţiunea maşiniiPuterea consumată la antrenare prin priza de putere
Fig. 6.41 Variaţia ponderii puterilor consumate la tracţiune, Pt şi la acţionarea prin priză, Pp,
în funcţie de viteza de lucru a sistemului, la turaţia rotorului cu cuţite de 450 rot/min
57,17 56,29 55,81 56,60 56,85
43,71 44,19 43,40 43,1542,83
0
10
20
30
40
50
60
70
1,04 1,24 1,4 1,67 1,93 Viteza de lucru [m/s]
Po
nd
ere
pu
teri
[%
]
Puterea consumată pentru tracţiunea maşiniiPuterea consumată la antrenare prin priza de putere
Fig. 6.42 Variaţia ponderii puterilor consumate la tracţiune, Pt şi la acţionarea prin priză, Pp, în funcţie de viteza de lucru a sistemului, la turaţia rotorului cu cuţite de 390 rot/min

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
63
58,94 59,43 58,03 58,82 58,37
40,57 41,97 41,18 41,6341,06
0
10
20
30
40
50
60
70
1,04 1,24 1,4 1,67 1,93 Viteza de lucru [m/s]P
onde
re p
uter
i [%
]
Puterea consumată pentru tracţiunea maşiniiPuterea consumată la antrenare prin priza de putere
Fig. 6.43 Variaţia ponderii puterilor consumate la tracţiune, Pt şi la acţionarea prin priză, Pp,
în funcţie de viteza de lucru a sistemului, la turaţia rotorului cu cuţite de 355 rot/min
Din analiza celor trei grafice se observă că variaţia ponderilor puterilor consumate de maşină în timpul lucrului este nesemnificativă cu modificarea vitezei de lucru a sistemului. Se observă o creştere a ponderii puterii consumate pentru tracţiune şi o scădere corespunzătoare a puterii consumate prin priză cu scăderea turaţiei rotorului cu cuţite, mai pronunţate la vitezele inferioare de lucru. Puterea medie efectivă globală Pem dezvoltată de motor pentru a fi transmisă la tracţiune (Pet) şi antrenare prin priza de putere (Pep) calculate cu relaţiile 6.8, 6.9 şi 6.11 pentru randamente medii ale transmisiilor prizelor de putere p şi randamente medii ale cutiei de viteze
cv , depinde, de viteza de lucru, aşa cum rezultă din graficele din figura 6.44.
0
20
40
60
80
100
120
140
160
1 1,2 1,4 1,6 1,8 2
Viteza de lucru [m/s]
Put
eri t
rans
mis
e de
mot
or [
kW]
Pep[kW]
Pet[kW]
Pem[kW]
Fig. 6.44 Variaţia puterilor efective transmise de motor în funcţie de viteza de lucru a
sistemului, la turaţia rotorului cu cuţite de 450 rot/min
Din analiza graficului din fig. 6.44 se observă că puterea efectivă globală precum şi puterile transmisă pentru tracţiune şi pentru antrenarea prizei de putere, cresc odată cu creşterea vitezei de lucru a sistemului. De asemenea, se observă că motorul tractorului A1800-AM (puterea nominală 132,2 kW) are o încărcare de aproape 79,7% (Pem=105,4 kW) la deplasarea cu o viteză de lucru de 1,4 m/s (5,04 km/h) în agregat cu ACPG3 la care turaţia rotorului cu cuţite şi adâncimea de lucru sunt maxime, 450 rot/min, resp., 12 cm, iar adâncimea de lucru a cuţitelor de afânare este tot maximă, adică 25 cm.
Variaţia puterilor efective transmise de motor în funcţie de viteza de lucru a sistemului, la turaţia rotorului cu cuţite de 390, respectiv 355 rot/min, este prezentată prin graficele din fig. 6.45 şi 6.46.

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
64
0
20
40
60
80
100
120
140
160
1 1,2 1,4 1,6 1,8 2
Viteza de lucru [m/s]
Put
eri t
rans
mis
e de
mot
or [
kW]
Pep[kW]
Pet[kW]
Pem[kW]
Fig. 6.45 Variaţia puterilor efective transmise de motor în funcţie de viteza de lucru a
sistemului, la turaţia rotorului cu cuţite de 390 rot/min
0
20
40
60
80
100
120
140
1 1,2 1,4 1,6 1,8 2
Viteza de lucru [m/s]
Put
eri t
rans
mis
e de
mot
or [k
W]
Pep[kW]
Pet[kW]
Pem[kW]
Fig. 6.46 Variaţia puterilor efective transmise de motor în funcţie de viteza de lucru a
sistemului, la turaţia rotorului cu cuţite de 355 rot/min
Din analiza ultimelor trei grafice se observă că puterea efectivă globală precum şi puterile transmisă pentru tracţiune şi pentru antrenarea prizei de putere, descresc odată cu scăderea turaţiei rotorului cu cuţite. Astfel, încărcarea motorului de 79,7% corespunzătoare turaţiei rotorului de 450 rot/min şi vitezei de lucru de 1,4 m/s (5,04 km/h) scade la 75,7 % (Pem=100,13 kW) pentru turaţia rotorului de 355 rot/min la aceeaşi viteză de lucru de 1,4 m/s.

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
65
CAPITOLUL 7 CONCLUZII ŞI CONTRIBUŢII PERSONALE
7.1 CONCLUZII GENERALE
Tehnologiile actuale de pregătire a terenului în vederea însămânţării presupun realizarea lucrării atât pe terenuri prelucrate ulterior (arate) cât şi pe terenuri neprelucrate (fără arătură), cu o mare diversitate de maşini, majoritatea având în componenţă grape de diferite tipuri, tăvălugi, cultivatoare, freze, sau maşini combinate: combinatoare şi agregate multiple.
Agregatele multiple pentru pregătirea patului germinativ s-au extins în ultimii ani datorită avantajelor economice (capacitate mare de lucru şi consum mai redus de combustibil la hectar) cât şi datorită realizării unei lucrări de bună calitate la o singură trecere, evitându-se astfel tasarea excesivă a solului.
În ultimul timp în România s-a extins construcţia de maşini combinate de pregătit patul germinativ formate din organe de lucru active (antrenate de la priza de putere) şi organe pasive, un exemplu constituindu-l agregatul combinat pentru pregătit patul germinativ ACPG-3, fabricat la SC MAT Craiova. Agregatului ACPG-3 i se poate ataşa o semănătoare de cereale păioase, realizându-se, astfel, pregătirea patului germinativ concomitent cu semănatul.
Pe plan mondial se constată tendinţa pregătirii terenului pentru semănat atât în sistem clasic (cu arătură) cât şi în sistemul de conservare a solului (prelucrare sol fără răsturnarea brazdei) folosind agregate formate din tractoare de mare putere şi maşini agricole combinate de mare capacitate, care la o singură trecere realizează pregătirea în condiţii foarte bune a terenului în vederea însămânţării şi chiar semănatul.
În vederea corelării parametrilor dinamici şi energetici ai tractorului (sursa energetică) cu cei ai maşinii de pregătit patul germinativ (consumator de energie) este necesară aprofundarea cercetărilor teoretice şi experimentale privind dinamica şi energetica acestor agregate, în vederea optimizării dinamice şi energetice a acestor sisteme complexe, pentru realizarea unor lucrări cu capacitate de lucru cât mai ridicată, cu indici calitativi corespunzători şi cu consum redus de energie.
Cercetările teoretice şi experimentale realizate pe plan mondial referitoare la dinamica şi energetica sistemelor tractor-maşină pentru pregătirea terenului în vederea însămânţării au fost abordate sporadic şi sumar pe plan naţional şi internaţional şi s-au concentrat mai ales asupra studiului şi analizei proceselor executate de organele de lucru ale acestor maşini, în vederea stabilirii parametrilor optimi constructivi şi funcţionali.
7.2 CONCLUZII REZULTATE DIN CERCETĂRILE TEORETICE
Metodologia de cercetare teoretică abordată în lucrare are la bază metoda modelării dinamice şi matematice pentru fiecare componentă (organe de lucru – cuţite de afânare sau decompactare, rotor cu cuţite, tăvălug cu pinteni) a maşinii, dar şi pentru maşina agricolă în ansamblu, stabilindu-se pentru acestea modele dinamice echivalente modelelor fizice reale.
Din analiza modelului dinamic echivalent al sistemelor tractor-maşină pentru pregătirea terenului în vederea însămânţării, cu aplicare la agregatul combinat pentru pregătit patul germinativ ACPG-3, a modelului matematic aferent şi a bilanţului de tracţiune al sistemului la deplasarea în lucru, cu viteză constantă, pe teren orizontal, se constată că forţa totală de rezistenţă opusă de organele de lucru ale maşinii, combinate este diminuată cu valoarea forţei de împingere creată de rotorul cu cuţite al frezei.

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
66
Din analiza dinamicii longitudinale a sistemului la deplasarea în lucru, pe teren orizontal sau pe pantă, se constată că maşina de lucru cuplată la mecanismul de suspendare al tractorului încarcă suplimentar puntea spate a tractorului, descărcând corespunzător puntea faţă. Pentru a nu se pierde maniabilitatea tractorului se impune ca pe puntea din faţă (de direcţie) trebuie să se menţină o sarcină egală cu cel puţin 20% din greutatea tractorului. Problema stabilităţii la răsturnare a tractorului nu u se pune în mod efectiv, deoarece chiar dacă roţile din faţă ale tractorului se desprind de sol, tractorul se va sprijini mai departe pe roţile punţii din spate şi pe organele de lucru ale maşinii cuplate la tractor.
Stabilitatea longitudinală a tractorului la deplasare în urcare pe pantă cu maşina în poziţie de transport este condiţionată atât din punct de vedere al maniabilităţii cât şi al răsturnării, fiind influenţate de unghiul pantei, greutatea maşinii şi poziţia centrului de greutate al acesteia în raport cu axa punţii spate a tractorului,
Din analiza rezultatelor obţinute în urma simulării pe calculator a comportării dinamice a agregatului de pregătit patul germinativ ACPG-3 se constată următoarele:
forţa de tracţiunea a maşinii pentru efectuarea procesului de lucru, transmisă tractorului prin mecanismul de suspendare, creşte cu creşterea adâncimii de lucru a cuţitelor de afânare şi cu scăderea adâncimii de lucru a rotorului cu cuţite;
- la adâncimea minimă a rotorului cu cuţite (ar= 0,04m), forţa de tracţiune totală creşte de la valoarea de 19900N, corespunzătoare adâncimii minime de lucru a cuţitelor de afânare (ac= 0,10m), la valoarea de cca. 34600 N pentru adâncimea maximă a cuţitelor de afânare (ac= 0,25 m).
- la adâncimea maximă a rotorului cu cuţite (ar= 0,12 m) forţa de tracţiune totală creşte de la valoarea de 6900N, corespunzătoare adâncimii minime de lucru a cuţitelor de afânare, la valoarea de aprox. 21700N pentru adâncimea maximă a cuţitelor de afânare. forţa de apăsare exercitată de maşină în procesul de lucru în punctele de
cuplare la mecanismul de suspendare al tractorului, creşte cu mărirea adâncimii de lucru a cuţitelor de afânare şi cu scăderea adâncimii de lucru a rotorului cu cuţite al frezei;
- la adâncimea minimă a rotorului cu cuţite (ar= 0,04m), forţa rezultantă de apăsare creşte de la valoarea de 5550N, corespunzătoare adâncimii minime de lucru a cuţitelor de afânare (ac= 0,10m), la valoarea de cca. 9250N pentru adâncimea maximă a cuţitelor de afânare (ac= 0,25m).
- la adâncimea maximă a rotorului cu cuţite (ar= 0,12 m), forţa rezultantă de apăsare creşte de la valoarea de 1300N, corespunzătoare adâncimii minime de lucru a cuţitelor de afânare, la valoarea de aprox. 5000N pentru adâncimea maximă a cuţitelor de afânare. forţele de reacţiune a solului asupra patinei de sprijin a frezei cresc cu
creşterea adâncimii de lucru a rotorului cu cuţite. De asemenea, se poate observa şi o creştere sensibilă a acestor forţe cu creşterea adâncimii de lucru a cuţitelor de afânare;
- la adâncimea maximă a cuţitelor de afânare (ac=0,25m), forţa de apăsare a patinelor pe sol creşte de la valoarea de cca. 690N corespunzătoare adâncimii minime a rotorului cu cuţite (ar= 0,04m) până la valoarea de cca. 15700N, pentru adâncimea maximă a rotorului (ar= 0,12m).
- la adâncimea maximă a cuţitelor de afânare (ac=0,25m), forţa de rezistenţă la alunecare a patinei creşte de la valoarea de cca. 138N corespunzătoare adâncimii minime a rotorului cu cuţite până la valoarea de cca. 3130N, pentru adâncimea maximă a rotorului. momentul de torsiune la rotorul cu cuţite al frezei creşte cu creşterea
adâncimii de lucru a rotorului, de la valoarea de aprox. 807Nm corespunzătoare adâncimii minime (ar= 0,04m) la valoarea de cca. 2420Nm, pentru adâncimea maximă (ar= 0,12m). Variaţia momentului de torsiune este nesemnificativă în raport cu adâncimea de lucru a cuţitelor de afânare.

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
67
Analiza energetică a sistemelor tractor maşină agricolă de pregătire a terenului în vederea însămânţării se poate face pe baza modelelor energetice echivalente, care iau în considerare atât parametrii cinematici şi dinamici cât şi condiţiile concrete de lucru (cerinţe tehnologice, condiţii de mediu, regimul de lucru, parametrii componentelor sistemului).
7.3 CONCLUZII REZULTATE DIN CERCETĂRILE EXPERIMENTALE
Cercetarea experimentală a dinamicii şi energeticii sistemului tractor-maşină de pregătit terenul în vederea însămânţării a fost efectuată pe sistemul format din tractorul pe roţi articulat A 1800-AM (fabricat la SC MAT SA Craiova) şi agregatul combinat pentru pregătit patul germinativ ACPG-3 (realizat la INMA Bucureşti) la lucru pe mirişte, pe terenurile Institutului Naţional pentru Maşini Agricole (INMA) Bucureşti.
Pentru cercetarea experimentală a comportării dinamice a sistemului a fost necesară măsurarea şi înregistrarea simultană a următorilor parametri dinamici: forţele de tracţiune şi apăsare care acţionează în punctele de cuplare a maşinii la tractor; momentul de torsiune transmis la maşină prin arborele prizei de putere a tractorului, pentru antrenarea rotorului cu cuţite; momentele de torsiune la arborii cardanici de antrenare a punţilor tractorului; Pentru măsurarea forţelor (de tracţiune şi de apăsare) din punctele de cuplare a maşinii la tractor s-a proiectat şi realizat de către autor un dispozitiv cu inele tensometrice (ramă tensometrică).
Pentru cercetarea experimentală a comportării energetice a sistemului a fost necesară măsurarea şi înregistrarea simultană a următorilor parametri cinematici: turaţia arborelui prizei de putere a tractorului; turaţia arborilor cardanici de antrenare a punţilor tractorului; viteza reală de deplasare a sistemului;
Pentru măsurarea, înregistrarea şi achiziţionarea parametrilor dinamici şi cinematici menţionaţi a fost utilizat un sistem de traductoare de măsurare a forţelor, momentelor, vitezelor şi turaţiilor, care au fost amplasate pe tractor şi maşină în punctele corespunzătoare de măsură, utilizând un sistem de achiziţie şi prelucrare a datelor tip DAP 1200 MICROSTAR LABORATORIES aflat în dotarea Laboratorului de Încercări al INMA-Bucureşti.
În urma prelucrării datelor şi analizării rezultatelor obţinute prin cercetarea experimentală rezultă următoarele concluzii:
forţa de tracţiunea a maşinii transmisă tractorului prin mecanismul de suspendare scade cu creşterea vitezei de lucru pentru toate cele trei turaţii ale rotorului cu cuţite. Astfel de la valoarea maximă de aproximativ 29600 N, corespunzătoarea vitezei de lucru de aprox. 1,04 m/s, forţa de tracţiune Ft scade la valoarea de 28900 N la o viteză de lucru de 1,503 m/s, pentru turaţia rotorului cu cuţite de 355 rot/min. Se observă că pentru o creştere a vitezei de lucru de la 1,04 la 1,503 m/s (aprox. 45%) forţa de rezistenţă la tracţiune opusă de maşină scade de la 29600 la 28900 N, reprezentând o scădere de aprox. 2,4%. Forţa de tracţiune a maşinii are o scădere sensibilă cu scăderea turaţiei rotorului cu cuţite. forţa de apăsare a maşinii transmisă tractorului prin mecanismul de
suspendare scade cu creşterea vitezei de lucru pentru toate cele trei turaţii ale rotorului cu cuţite. Astfel de la valoarea maximă de aproximativ 10600 N, corespunzătoarea vitezei de lucru de aprox. 1,04 m/s, forţa apăsare Fz scade la valoarea de 10200 N la o viteză de lucru de 1,503 m/s, pentru turaţia rotorului cu cuţite de 355 rot/min. Se observă că pentru o creştere a vitezei de lucru de la 1,04 la 1,503 m/s (aprox. 45%) forţa de apăsare exercitată de maşină asupra tractorului scade de la 10600 la 10200 N, reprezentând o scădere de aprox. 3,8%. De asemenea, din grafice se poate observa o scădere sensibilă a forţei de apăsare cu scăderea turaţiei rotorului cu cuţite. momentul de torsiune transmis la arborele prizei de putere creşte cu creşterea
vitezei de lucru pentru toate cele trei turaţii ale rotorului cu cuţite. Astfel de la valoarea minimă de aproximativ 214 Nm, corespunzătoarea vitezei de lucru de aprox. 1,04 m/s,

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
68
momentul la priză creşte la valoarea de 282 Nm la o viteză de lucru de 1,503 m/s, pentru turaţia rotorului cu cuţite de 355 rot/min. Se observă că pentru o creştere a vitezei de lucru de la 1,04 la 1,503 m/s (aprox. 45%) momentul la priză creşte de la 214 la 282 Nm, reprezentând o creştere de aprox. 31,7%. momentul de torsiune transmis la arborele prizei de putere creşte cu creşterea
turaţiei rotorului cu cuţite. La o creştere a turaţiei rotorului de la 355 la 450 rot/min (creştere de 26,7%) pentru viteza de lucru de 1,04 m/s se produce o creştere a momentului la priză de la 214 la 265 Nm, de aprox. 23,8%. momentele de torsiune transmise la cei doi arbori cardanici de antrenare a
punţilor motoare au o scădere uşoară cu creşterea vitezei de deplasare, scăderea fiind mai mare pentru momentul de la arborele cardanic al punţii spate, de la 796 la 776 Nm, corespunzătoarea unei creşteri de viteză de deplasare de la 1,04 m/s la 1,503 m/s. Variaţiile celor două momente de la arborii cardanici ai punţilor motoare faţă şi spate, în funcţie de turaţia rotorului cu cuţite sunt nesemnificative. patinarea tractorului se încadrează în limite normale cu valori de la aprox. 6 la
9 % având o scădere uşoară cu creşterea vitezei de deplasare a sistemului şi cu scăderea turaţiei rotorului cu cuţite. puterea consumată de maşină pentru tracţiune în procesul de lucru creşte
odată cu creşterea vitezei de deplasare. Astfel prin creşterea vitezei de la 1,04 la 1,4 m/s (creştere de 1,35 ori) puterea medie consumată la tracţiune creşte de 1,31 ori de la 30,8 la 40,5 kW. Puterea consumată de maşină pentru tractare în procesul de lucru are variaţii nesemnificative cu modificarea turaţiei rotorului cu cuţite. puterea consumată de maşină în procesul de lucru pentru acţionarea de la
priza de putere a tractorului, creşte odată cu creşterea vitezei de depalsare. Astfel prin creşterea vitezei de lucru de la 1,04 la 1,4 m/s (creştere de 1,35 ori) puterea medie consumată la priză creşte de 1,25 ori de la 27,7 la 34,8 kW, pentru turaţia rotorului cu cuţite de 450 rot/min, iar la rotaţia de 355 rot/min pentru aceeaşi viteză de lucru, puterea consumată la priză creşte de 1,36 ori de la 21,5 la 29,2 kW. Rezultă, deci, că la aceeaşi creştere a vitezei de lucru, puterea consumată de maşină pentru acţionarea prin priză creşte mai repede la turaţia mai mică a rotorului cu cuţite faţă de turaţia superioară a rotorului. Puterea consumată de maşină prin priza de putere creşte cu creşterea turaţiei rotorului cu cuţite. ponderea puterii consumate de maşină pentru tracţiune creşte faţă de
ponderea puterii consumate prin priză cu scăderea turaţiei rotorului cu cuţite, mai pronunţate la vitezele inferioare de lucru. Astfel la turaţia rotorului cu cuţite de 450 rot/min ponderea puterii consumate la tracţiune este 52...53%, iar la turaţia de 355 rot/min valorile ponderilor cresc la 58…59%. În acelaşi timp ponderea puterii consumate la priză scade de la 47...48%, pentru o turaţie a rotorului cu cuţite de 450 rot/min, la 41…42% la turaţia de 355 rot/min a rotorului. Variaţia ponderilor puterilor consumate de maşină pentru tracţiune şi la priză în timpul lucrului este nesemnificativă cu modificarea vitezei de lucru a sistemului. motorul tractorului A1800-AM (cu puterea nominală 132,2 kW) are o încărcare
de aproape 79,7% la deplasarea cu o viteză de lucru de 1,4 m/s (5,04 km/h) cu agregatul combinat pentru pregătit patul germinativ ACPG-3 la care turaţia rotorului cu cuţite al frezei şi adâncimea de lucru sunt maxime (450 rot/min şi, respectiv, 12 cm) în situaţia în care adâncimea de lucru a cuţitelor de afânare este maximă (25 cm). puterea efectivă globală a motorului tractorului precum şi puterile efective
transmise pentru tracţiune şi pentru antrenarea prizei de putere, scad odată cu scăderea turaţiei rotorului cu cuţite al frezei. Astfel, încărcarea motorului de 79,7% corespunzătoare turaţiei rotorului de 450 rot/min şi vitezei de lucru de 1,4 m/s (5,04 km/h) scade la 75,7 % pentru turaţia rotorului de 355 rot/min la aceeaşi viteză de 1,4 m/s şi în aceleaşi condiţii de lucru.

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
69
7.4 CONTRIBUŢII PERSONALE ALE AUTORULUI
La elaborarea lucrării de doctorat autorul a adus o serie de contribuţii personale la cercetarea teoretică şi experimentală, cele mai importante fiind următoarele:
Analiza teoretică a proceselor de lucru şi a dinamicii unor maşini echipate cu organe de lucru (cuţite de afânare, freze cu rotor orizontal, tăvălugi) care se folosesc frecvent la maşinile combinate de pregătit patul germinativ.
Analiza teoretică a dinamicii generale şi energeticii sistemelor tractor-maşină utilizată la pregătirea terenului în vederea însămânţării pentru diverse situaţii de cuplare (purtate, tractate, semipurtate) şi diferite situaţii de lucru şi deplasare.
Elaborare unor modele dinamice şi matematice ale sistemului tractor–agregat combinat pentru pregătit patul germinativ, care a permis studiul teoretic, prin simularea pe calculator, a comportării dinamice a sistemului în procesul de lucru, în diferite condiţii de lucru şi de deplasare (pe teren în pantă transversală şi pe teren orizontal).
Conceperea, proiectarea, realizarea şi testarea de către autor a unui dispozitiv cu inele tensometrice (ramă tensometrică) pentru măsurarea forţelor din punctele de cuplare a maşinilor purtate la tractor. Rama tensometrică a fost modelată cu ajutorul calculatorului (programul SOLID WORKS) şi s-a realizat în construcţie modulată putându-se cupla la tractoare de mare putere echipate cu mecanisme de suspendare spate din categoria a III-a şi a IV (L sau H).
Rama tensometrică realizată echipată cu traductoare şi etalonată permite determinarea, prin măsurători, a forţelor de rezistenţă la tracţiune atât pentru maşini de lucru purtate cât pentru maşini tractate sau semipurtate (cuplate la o bară transversală de tracţiune montată în punctele inferioare ale ramei).
Elaborarea şi utilizarea unei instalaţii şi metodologii moderne de investigare experimentală, care a permis achiziţia, stocarea şi prelucrarea datelor prelevate pentru parametrii urmăriţi în cadrul cercetărilor experimentale.
Prelucrarea şi analiza datelor obţinute experimental, prin măsurători, şi elaborarea de concluzii referitoare la parametri dinamici şi a necesarului de energie la pregătirea terenului în vederea însămânţării cu sistemul format din tractorul A1800–AM şi agregatul de pregătit patul germinativ ACPG-3, pentru diverse condiţii de lucru.

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
70
BIBLIOGRAFIE SELECTIVĂ
1 Al-Janobi, A., A data-acquisition system to monitor performance of a fully mounted implement. J. Agric. Engn. Res., pp.167-175, 2000;
3 Areny, R.P., Webser, J. G.,
Sensors and Signal Conditioning, John Wilez and Sons Inc., New York, 1991;
4 Asch, G., Les capteurs en instrumentation industrielle, Dunod Paris, 1999; 5 Avernhammer, H., Elektronik in Traktoren und Maschinen, Einsatzgebiete Funktion,
Entwicklungstendenzen, BLV verlagsesellschaft mbH, München,1998;
10 Băţagă, N., Încercarea şi experimentarea tractoarelor şi maşinilor agricole, Institutul Politehnic Cluj-Napoca, 1982;
13 Bejan, M., Unităţi de măsură, Editura Cărţii de Ştiinţă, Cluj-Napoca, 1997; 14 Bernacki, H. , Investigation of energy requirement for tilage by active and by
combined active passive machines, Report USDFA, 1972; 15 Bernacki, H. , Rotary tillage machines combined with passive tools, Report USDA,
1969; 18 Bernacki, H., Agricultural machines theory and construction (vol I), Warsaw,
Published for US Department of Agriculture and the National Science Foundation, Washington DC, 1981;
21 Bernstein, H., Sensoren und Messelektomik. Pflaum-Verlag, Műnchen, 1998; 23 Boruz, S.P., „Cercetări privind dinamica şi energetica agregatelor cu freze cu ax
vertical utilizate la prelucrarea solului pe rânduri de pomi”, Teza de doctorat, Universitatea Transilvania din Braşov , Braşov, 2005;
24 Căproiu, Şt. ş.a.
Maşini agricole de lucrat solul, semănat şi întreţinerea culturilor, E.D.P., Bucureşti, 1982;
26 Ciascai, I., Sisteme de achiziţie de date pentru calculatoare personale, Editura Albatros, Cluj-Napoca, 1998;
28 Ciolacu, F. Traductoare şi aparate de măsură, Reprografia Universităţii din Craiova, 1999;
29 Ciolacu, F. şi colaboratorii,
Principii şi metode de măsurare, Editura Universitaria, Craiova, 2002;
30 Ciulu, Gh. „Optimizarea exploatării agregatelor agricole” – partea I, Reprografia Universităţii din Craiova, 2000;
31 Ciulu, Gh., Bârcă, Gh.
„Optimizarea exploatării agregatelor agricole” – partea a II-a, Tipografia Universităţii din Craiova, 2002;
32 Cojocaru, I., şi col
Cercetări privind tehnologia de lucrare a solului fără răsturnarea brazdei cu cizelul, la înfiinţarea culturilor de cereale păioase, SMAT2001, Craiova, 2001 ;
33 Constantinescu Augustin
“The dynamic study of some tractor system-agriculture machines hold in back, without wheels, used to the preparation of the land for sowing” Simpozionul cu Participare Internaţională „Agricultura Durabilă - Agricultura Viitorului”, Ediţia I, Universitatea din Craiova, 9 – 10 dec. 2005.
35 Constantinescu Augustin, Popescu Simion
“Studiul dinamic al unor sisteme tractor-maşină agricolă tractată utilizate la pregătirea terenului pentru semănat” INMATEH-2006-II Lucrări ştiinţifice cu tema: „Cercetarea de excelenţă în agricultură şi industria alimentară din România”, INMA Bucureşti, iunie 2006.
36 Constantinescu Augustin, Popescu Simion
“Same aspect regarding the dynamics of the tractor-disk harrow system used for the seedbed preparation”, 47th International conference of departments of design of machine elements and mechanisms, Prague, Czech Republic, 13.09-15.09.2006,
37 Constantinescu Augustin, Popa Gheorghe, Dumitru Ilie
“The energetic analyse of the system tractor-agriculture machine used for the preparation of the soil for sowing”, The 1st International Conference on Motor Vehicle and Transportation MVT 2006, november 15-17th, Timisoara, Romania, 2006;

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
71
38 Constantinescu Augustin, Popescu Simion
“Theoretic determination of the necessary power for the driven of the combined seedbed preparation devices ACPG-3” The scientific conference with international participation „Durable Agriculture-agriculture of the future”, Ediţia a III-a, Universitatea din Craiova, Facultatea de Agricultură, Craiova, 22-23 noiembrie 2007.
39 Constantinescu Augustin, Popescu Simion
“The measure equipment of the resistance forces to the traction of the carried agriculture machine on tractor rear mounted three point linkage by the 3rd and the 4th category” International Congress Automotive, Safety and Environment - Second edition, SMAT 2008, Universitatea din Craiova, 23-25 octombrie, 2008.
40 Constantinescu Augustin, Popescu Simion
Equipment and methodology for experimental research of the dynamic and energetic of the high power agricultural tractors of in aggregate with tillage machine systems, The 3rd International Conference “Computational Mechanics And Virtual Engineering And Applications In Automotive Engineering”, COMEC 2009, Universitatea Transilvania din Braşov, 2009
43 Dobrescu, C., Consumul energetic la lucrările cu agregate mobile, mecanizarea agriculturii, Nr. 4, Bucuresti, 1981;
44 Dobrescu, C., „Studiul sistemic al agregatelor agricole” Editura de Propagandă Tehnică Agricolă, Bucureşti, 1985;
45 Drocaş, I., Naghiu, A.
„Baza energetică pentru agricultură”, Editura Risoprint, Cluj Napoca, 1999;
47 Dumitru I., Pisoschi Al.-Gr., Popa Gh., Vînătoru A. C,
Consideraţii privind operaţiile de măsurare întâlnite la cercetarea sistemelor tehnice de tipul tractor-maşină de lucru, Analele Universităţii din Craiova, vol XXXI, pp. 355-360, Editura Universitaria, Craiova, 2001;
50 Fichtel, H., Ismail, S.M.,
Untersuchung zur Messung der Arbeitsgeschwindigkeit von Landmaschenen. Grundl. Landtechnik, Nr.4, pp.136–140, 1982;
52 Gaultney, L., Harlow, S. Ooms, W.,
An expert system for troubleshooting tractor hydraulic systems, Computer and electronics in agriculture, vol. 3, No.3, pp. 177-187;
53 Gevatter, H.-I. Automatisierungstechnik. Mess-und Sensorentechnik. Springer Verlag, Berlin, 2000;
58 Havelec, S. , Influenţa formei organului activ al frezelor asupra consumului de energie, Zemedelska Technika, 12 – 1966;
59 Hoffman, J., Taschenbuch der Messtechnik. Fachbuchverlag-Leipzig, 1998; 60 Hoffman, K., Eine Einfűhrung in die Technik des Messens mit
Dehnungsmessstreifen. HBM-Messtechnik, Darmstadt, 1987; 63 Ionescu, G.
şi col., Traductoare pentru automatizări industriale, Editura Tehnică, Bucureşti, 1985;
64 Ionescu, G., Măsurări şi traductoare, vol. I, Editura Didactică şi Pedagogică, Bucureşti, 1985;
65 Juk, I. M. , Determinarea forţelor care acţionează asupra organului de lucru al rotorului frezei, Mehanizaţia i electificaţia s. – h., 4 – 1969;
68 Krasnicenko, V. A. „Manualul constructorului de maşini agricole” (traducere din limba rusă), vol. I şi II, Editura Tehnică, Bucureşti, 1963 şi 1964;
71 Letoşnev, M. N., Maşini agricole, Editura Agrosilvică, Bucureşti, 1969; 72 Lisunov, E. A. , Capacitatea energetică a frezării solului, Mehanizaţia i electificaţia s.
– h., 10 – 1968; 75 Mertins, K. H., Theoretische und apparative Veraussetzung zur
Traktoreinsalzoptimierung mit Hilfe von Fahrerinformationssystemen, Fortschr-Ber., VDI – Reibe 14, nr. 25, VDI-Verlag, Düsseldorf, 1984;
76 Mertins, K. H., Gerhards, A.,
Betraschtungen zur Elektronik-Anwendung bei Traktoren, Grundl. Landtechnik Bd. 36, Nr. 5,1986;
77 Micu, C. şi colab. Aparate şi sisteme de măsurare în construcţii de maşini, Ed. Tehnică, Bucureşti, 1980.
80 Naghiu, Al., Naghiu, L.,
Baza energetică pentru horticultură, Editura Risoprint, Cluj-Napoca, 2000;

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
72
81 Naghiu, A., ş.a. „Maşini şi instalaţii agricole”, vol.I, Editura Risoprint, Cluj Napoca, 2004;
83 Năstăsoiu, S., Popesu, S. ş.a.,
Tractoare, Editura Didactică şi Pedagogică, Bucureşti, 1983;
84 Negruş, E. şi colab.
Încercarea autovehiculelor, Ed. Didactică şi Pedagogică, Bucureşti, 1982.
86 Niţescu, Gh., Năstăsoiu, Şt., Popescu‚ S.,
Tractoare, Editura Didactică şi Pedagogică, Bucureşti, 1974;
87 Oppenheim A., Schafer, R.,
Discrete – time Signal Processing, Ed. Prentice-Hall, Englewood Cliffs, N.J., 1989;
89 Pisoschi, Al.-Gr., s.a
Calculul şi construcţia maşinilor agricole pentru lucrările solului, semănat şi întreţinerea culturilor. Lucrări de laborator. Îndrumar, Reprografia Universitaţii din Craiova, Craiova, 2000;
92 Popescu, S., Tehnologia exploatării tractoarelor şi maşinilor agricole, Universitatea din Braşov, 1974;
93 Popescu, S., şi col.
Automatizarea maşinilor şi instalaţiilor agricole. Îndrumar de lucrări practice, Universitatea din Braşov, 1984;
94 Popescu, S., şi col.
Exploatarea utilajelor agricole, Îndrumar de lucrări practice, Universitatea din Braşov, 1985;
95 Popescu, S., şi col.,
„Studiul teoretic şi experimental al dinamicii agregatului tractor-maşină agricolă cu considerarea caracteristicilor aleatoare ale solului “, Braşov, 1991;
96 Popescu, S., Bădescu, M.,
Diagnosticarea şi întreţinerea tehnică a tractoarelor, Editura Ceres, Bucureşti, 1992;
97 Popescu, S., Ghinea, T.,
Automatizarea maşinilor şi instalaţiilor folosite în agricultură, Editura Scrisul Românesc, Craiova, 1986;
98 Popescu, S., Ormenişan, N., Popescu, O.
Sisteme informaţionale de bord pentru controlul şi supravegherea funcţionării tractoarelor, Mecanizarea agriculturii, nr.2, p.11-14, 1993;
99 Popescu S., Ene T. A., Constantinescu A.
“Cercetări teoretice şi experimentale privind influenţa parametrilor pneurilor maşinilor asupra proceselor de tasare şi compactare a solului”, INMATEH-2006-II, Lucrări ştiinţifice cu tema: „Cercetarea de excelenţă în agricultură şi industria alimentară din România”, INMA Bucureşti, iunie 2006;
102 Roş, V., Maşini agricole pentru lucrările solului, I.P. Cluj – Napoca, 1974; 103 Roş, V.,
ş.a Model matematic pentru analiza energetică a procesului de prelucrare a solului, TRANSAGRATECH, Cluj –Napoca, 1998;
104 Rus, F., Popescu, S.
Aparat pentru măsurarea directă a patinării tractoarelor, Comunicări ştiinţifice “Realizări şi perspective în domeniul maşinilor şi instalaţiilor agricole”, I.P. Cluj-Napoca, p. 210-213, 1977;
106 Schilling, G. , Landmachinen, vol. II, Ed. II, Koln, 1962; 107 Scripnic, V.,
Babiciu, P., Maşini agricole, Editura Ceres, Bucureşti, 1979;
108 Scripnic, V., Cristea, I.
Cercetări privind energetica agregatelor mobile, Lucrări ştiinţifice din domeniul mecanizării agriculturii, 1991-1994, ASAS, Bucureşti, 1995.
109 Scripnic, V., Cristea, I., Begheş, H.,
Metoda şi aparatura pentru determinarea indicilor energetici ai maşinilor agricole, Conferinţa cu participare internaţională „Prezent şi viitor în domeniul maşinilor şi instalaţiilor destinate agriculturii şi industriei alimentare”, vol. II, Bucureşti, 1997;
112 Sohne, W., Thiel, R. ,
Technical problems with rotary cultivators, Grundlagen der landtechnik, 9 – 1969;
114 Sohne, W., Eggenmuler, A. ,
Fast running rotary cultivators and slow running diggers, Grundlagen der landtechnik, 11 – 1959;
115 Stanomir, D., Semnale analogice şi transformatele lor, Editura Athena, 1992; 117 Starodinschi, D. Z.
, Căile de reducere a consumului de energie la lucrul frezelor de sol, Traktorî i selhozmaşin, 5 – 1967
118 Stetten, H., Messtechnik an Meschinen und Anlagen. B.G.Teubner-Stuttgart, 1992.Sttugart,1990;

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
73
119 Stoicescu, Gh. ş. a. ,
Studiul interdependenţei dintre parametrii constructivi şi cinematici ai cuţitelor frezelor, Studii şi cercetări de mecanică agricolă, 3 – 1970;
122 Stoicescu, Gh. , Studiul regimului de lucru al frezelor agricole, Studii şi cercetări pentru mecanizarea agriculturii, 1971;
124 Suchia, M. , Studies on power tiller în Japan, Yamagata University, 1965; 125 Szekely, I., Szabo,
W., Munteanu, R. Sisteme pentru achiziţie şi prelucrarea datelor, Ed. Mediamira, Cluj-Napoca, 1997.
126 Şandru, A., şi col.,
Reducerea consumului de energie prin folosirea raţională a agregatelor agricole, Editura Scrisul Românesc, Craiova, 1982;
127 Şandru, A., Popescu, S., ş.a.
Exploatarea utilajelor agricole, Editura Didactică şi Pedagogică, Bucureşti, 1983;
129 Tămăşanu, D-tru , Maşini cu organe rotative pentru prelucrarea solului, Ed. Ceres, Bucureşti, 1971;
131 Tecuşan, N., şi. Col.
Tractoare, Editura Didactică şi Pedagogică, Bucureşti, 1982;
132 Toma, D., Tractoare şi maşini agricole, partea a II-a „Maşini agricole” EDP, Bucureşti, 1981;
133 Toma, D., Sin, Gh. „Calitatea lucrărilor agricole executate mecanizat pentru culturile de câmp”, Editura Ceres, Bucureşti, 1987.
135 Vînătoru, M., Iancu, E.,
Fault tolerant control for actuator failures, 10th International Conference un Control System and Computer Science, Bucharest, vol. III, pp 244-249, 1995;
137 ***** ANSYS. Manual de utilizare; 138 ***** AUTOCAD 2000. Manual de utilizare; 139 ***** Carte tehnică agregat ACPG-3, 2003, S.C. MAT Craiova 140 ***** Carte tehnică tractor A1800-AM, 1998, S.C. MAT Craiova 142 ***** MAPLE. Manual de utilizare; 143 ***** MATHCAD 6.0 PLUS. Manual de utilizare; 145 ***** Prospecte ale firmelor SC MAT SA Craiova, Tractorul UTB Braşov,
Mecanica Ceahlăul Piatra Neamţ, SUMA Băileşti, Kverneland, Lemken, Kuhn, Nardi, Amazone, Vogel &Noot, Eberhardt; Case, Deutz Fahr, Fendt, FiatAgri, Ford, John Deere, Massez Ferguson, New Holland, Renault, Same.
146 ***** SR ISO 730-1+C1:2000; SR ISO 789-1:1998; SR ISO 2332:1997.
147 ***** www.amazone.de 148 ***** www.deere.com/agriculture 149 ***** www.grupponardi.it 150 ***** www.hbm.com/en/menu/products/ 151 ***** www.kuhn.com 152 ***** www.kvernelandgroup.com 153 ***** www.lemken.com 154 ***** www.matcraiova.ro 155 ***** www.mecanicaceahlau.ro 156 ***** www.vogel-noot.info

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
74
LUCRĂRI PUBLICATE DE AUTOR
în domeniul tezei de doctorat
Nr. crt.
Autor(i) Denumire articol Manifestarea / organizator
1 Pisoschi Al.-Gr., Ilincioiu Dan, Popa Gh.,Constantinescu Augustin
Verificarea statică de rezistenţă a cadrului cultivatorului CPP-6 în plan orizontal,
INMATEH-2004 Lucrări ştiinţifice cu tema: „Tehnologii de mecanizare şi echipamente tehnice pentru agricultura ecologică”, INMA Bucureşti, ISSN 1583-1019, pag. 141-148;
2 Pisoschi Al.-Gr., Popa Gh., Constantinescu Augustin
Analiza încărcărilor şi tensiunilor din suportul bârsei plugului PP-4(3-30)
INMATEH-2004 Lucrări ştiinţifice cu tema: „Tehnologii de mecanizare şi echipamente tehnice pentru agricultura ecologică”, INMA Bucureşti, ISSN 1583-1019, pag. 157-164;
3 Ilincioiu Dan, Pisoschi Al.-Gr., Popa Gh., Constantinescu Augustin
Calculul dinamic al rezistenţei cadrului cultivatorului CPP-4
INMATEH- 2004-IV Lucrări ştiinţifice cu tema: „Soluţii şi oportunităţi în transferul tehnologic al rezultatelor cercetării ştiinţifice în domeniul tehnologiilor de mecanizare şi al echipamentelor tehnice pentru agricultură şi industria alimentară”, INMA Bucureşti, 2004, ISSN 1583-1019, pag. 47 – 54;
4 Ungureanu C.-A., Dumitru Ilie, Popa Gh., Constantinescu Augustin
Considerations regarding analysis and the prognosis with statistical methods of the environment pollution level due to the urbane vehicles traffic
CONAT 2004 The 10th International Congress, Braşov, 20-22 octombrie, ISBN 973-635-394-X;
5 Popa Gh., Dumitru I., Constantinescu Augustin
Theoretical studies regarding the tractive efforts for vehicles using the hydrostatic transmission
International Multidisciplinary Conference, Ediţia a 6-a,Volumul 2, Baia Mare, ISSN-1224-3264, ISBN 973-87237-1-x, pag. 593 - 598;
6 Constantinescu Augustin
The dynamic study of some tractor system-agriculture machines hold in back, without wheels, used to the preparation of the land for sowing
Simpozionul cu Participare Internaţională „Agricultura Durabilă - Agricultura Viitorului”, Ediţia I, Universitatea din Craiova, Facultatea de Agricultură, Craiova, 9 – 10 dec. 2005, ISSN – 1582 – 9391;
12 Pisoschi Al.-Gr., Popa Gh., Constantinescu Augustin,
The Dynamic Study of Self-Propelled Agricultural Combines as Technical System
Simpozionul cu Participare Internaţională „Agricultura Durabilă - Agricultura Viitorului”, Ediţia I, Universitatea din Craiova, Facultatea de Agricultură, Craiova, 9 – 10 dec. 2005, ISSN – 1582 – 9391;
7 Constantinescu Augustin, Pisoschi Al.-Gr., Popa Gh
The General Dynamics of Self-Propelled Combines Equipped with Bunkers
Simpozionul cu Participare Internaţională „Agricultura Durabilă - Agricultura Viitorului”, Ediţia I, Universitatea din Craiova, Facultatea de Agricultură, Craiova, 9 – 10 dec. 2005, ISSN – 1582 – 9391;
9 Constantinescu Augustin, Popescu Simion
Studiul dinamic al unor sisteme tractor-maşină agricolă tractată utilizate la pregătirea terenului pentru semănat
INMATEH-2006-II Lucrări ştiinţifice cu tema: „Cercetarea de excelenţă în agricultură şi industria alimentară din România”, INMA Bucureşti, iunie 2006, ISSN 1583-1019, pag. 177-184
10 Popescu Simion, Ene Tudor Adrian, Constantinescu Augustin,
Cercetări teoretice şi experimentale privind influenţa parametrilor pneurilor maşinilor asupra proceselor de tasare şi compactare a solului
INMATEH-2006-II Lucrări ştiinţifice cu tema: „Cercetarea de excelenţă în agricultură şi industria alimentară din România”, INMA Bucureşti, iunie 2006, ISSN 1583-1019, pag. 133-140;
11 Constantinescu Augustin, Popescu Simion
Same aspect regarding the dynamics of the tractor-disk harrow system used for the seedbed preparation
47th International conference of departments of design of machine elements and mechanisms, Prague, Czech Republic, 13.09-15.09.2006, ISBN 80-213-1523-7;
12 Constantinescu Augustin, Popa Gheorghe, Dumitru Ilie
The energetic analyse of the system tractor-agriculture machine used for the preparation of the soil for sowing,
The 1st International Conference on Motor Vehicle and Transportation MVT 2006, ISBN-10: 973 – 638 –284-0, november 15-17th, pp. 45-49, Timisoara, Romania, 2006;
13 Constantinescu Augustin, Popescu Simion
Theoretic determination of the necessary power for the driven of the combined seedbed preparation devices acpg-3
The scientific conference with international participation „Durable Agriculture-agriculture of the future”, Ediţia a III-a, Universitatea din Craiova, Facultatea de Agricultură, Craiova, 22-23 nov.2007,ISSN –1841-8317;
14 Constantinescu Augustin, Popescu Simion
The measure equipment of the resistance forces to the traction of the carried agriculture machine on tractor rear mounted three point linkage by the 3rd and the 4th category
International Congress Automotive, Safety and Environment - Second edition, SMAT 2008, ISBN 978-606-510-253-8, 978-606-510-245-3, vol. I, pag. 379-382, Universitatea din Craiova, 23-25 octombrie, 2008
15 Constantinescu Augustin, Popescu Simion
Equipment and methodology for experimental research of the dynamic and energetic of the high power agricultural tractors of in aggregate with tillage machine systems
The 3rd International Conference “Computational Mechanics And Virtual Engineering And Applications In Automotive Engineering”, COMEC 2009, Universitatea Transilvania din Braşov, 2009

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
CURRICULUM VITAE DATE PERSONALE: Numele şi prenumele: CONSTANTINESCU Augustin Data şi locul naşterii : 27.08.1972, Jud. GORJ, Loc. Tg. Logreşti Starea civilă: căsătorit Domiciliu: Str. Amaradia, nr. 30, bl. 57, sc. 1, ap. 16, Craiova Telefon: 0746018406 E-mail: [email protected] STUDII:
sept. 1986 – iun. 1990 Liceul Industrial Nr. 5, Tg. Jiu. oct. 1990 – iun. 1995 Universitatea din Craiova – Facultatea de Mecanică,
specializarea Maşini şi Instalaţii Agricole oct. 2003 – prezent - doctorand - Universitatea Transilvania din Braşov,
Facultatea de Alimentaţie şi Turism ACTIVITATEA PROFESIONALĂ:
1996-2003 – inginer, S.C. MAT S.A. Craiova 2003-2006 – asistent universitar, Facultatea de Mecanică din Craiova 2006-prezent – şef lucrări universitar, Facultatea de Mecanică din Craiova
ACTIVITATEA ŞTIINŢIFICĂ:
Cercetare-proiectare, S.C. MAT S.A. Craiova 2 cărţi coautor Articole publicate: 23 Contracte de cercetare: 5 - membru în colectiv.
LIMBI STRĂINE:
engleză – mediu; franceză – mediu; rusă - începător

REZUMATUL TEZEI DE DOCTORAT
Autor: Ing. Augustin CONSTANTINESCU Conducător ştiinţific: Prof. Univ. Dr. Ing. Simion POPESCU
CURRICULUM VITAE PERSONAL INFORMATION: Name and surname: CONSTANTINESCU Augustin Date and place of birth: 27.08.1972, GORJ district, Tg. Logreşti Marital status: married Address: Amaradia Street, no. 30, bl. 57, sc. 1, ap. 16, Craiova Phone: 074618406 E-mail: [email protected] STUDIES:
Sept. 1986 – Jun. 1990 Industrial High-School No. 5, Tg. Jiu. Oct. 1990 – Jun. 1995 University of Craiova – Faculty of Mechanics,
specialization Farming Machine and Installations. oct. 2003 – present – Ph D student - Transilvania University, Braşov – Faculty
of Food and Tourism PROFESSIONAL ACTIVITY:
1996-2003 – engineer, S.C. MAT S.A. Craiova 2003-2006 – assistant , Faculty of Mechanics of Craiova 2006-prezent – lecturer, Faculty of Mechanics of Craiova
SCIENTIFIC ACTIVITY:
Researches and design, S.C. MAT S.A. Craiova 2 published volumes Articles published: 23 Research contracts: 5 - member team
FOREIGN LANGUAGES:
English – medium French – medium Russian -beginner