
5. CAPITOLUL 6 Sisteme convenționale de reglare automată · 6.1. Sisteme de reglare automată...
12
6.1. Sisteme de reglare automată după efect 5. CAPITOLUL 6 Sisteme convenționale de reglare automată Un Sistem de Reglare Automată (SRA) este un sistem tehnic cu ajutorul căruia se urmărește aducerea sau menținerea valorii mărimii de ieșire dintr-un proces la o valoare de referință în mod automat, fără intervenția omului, pe baza unei legi de reglare. Un SRA este format din două elemente: o dispozitivul de automatizare - cu rolul de a primi informație referitoare la starea curentă a procesului reglat, și de a genera comenzi convenabile, în vederea menținerii sau aducerii ieșirii acestuia la o anumită valoare dorită (de referință); o procesul de automatizat (de reglat). Dispozitivul de automatizare cuprinde în structura sa traductorul - ce furnizează informația cu privire la valoarea curentă a ieșirii procesului, regulatorul - ce generează comenzile astfel încât să se îndeplinească obiectivul reglării (menținerea sau aducerea stării curente a unui proces într-o anumită stare de referință) și elementul de execuție - ce are rolul de a aplica comanda regulatorului, în proces. Un SRA poate funcționa pe baza principiului reglării după efect și principiului reglării după cauză. În funcție de principiul reglării care stă la baza legii de reglare, un SRA poate fi după efect sau după cauză. În continuare sunt prezentate câteva aspecte de principiu referitoare la aceste două tipuri de sisteme de reglare automată, precum și câteva exemple de sisteme folosite pentru reglarea unor parametrii tehnologici. 1.30 6.1. Sisteme de reglare automată după efect Sistemele de reglare automată după efect funcționează pe baza principiului reglării după efect care presupune intervenția asupra procesului reglat, pe baza informației obținute prin măsurarea mărimii reglate, în vederea menținerii acestei mărimi la o valoare cât mai apropiată de valoarea referinței. [Mihalache, 2008] Schema bloc a unui astfel de SRA este prezentată în figura 6.1. Fig.6.1. Schema bloc a unui SRA după efect: R - Regulator, EE -Element de Execuție, T - Traductor, P -Proces, r - referință, c - comandă, u - mărime de execuție, m-măsură, y - ieșire, v 1 , v 2 - perturbații. Avantaj: acțiunea de reducere a erorii (diferența dintre valoarea referinței și valoarea ieșirii) începe din momentul producerii celei mai mici erori sesizabile, indiferent de cauza care a provocat eroarea. 49
Transcript of 5. CAPITOLUL 6 Sisteme convenționale de reglare automată · 6.1. Sisteme de reglare automată...
6.1. Sisteme de reglare automată după efect
5. CAPITOLUL 6 Sisteme convenționale de reglare automată
Un Sistem de Reglare Automată (SRA) este un sistem tehnic cu ajutorul căruia se urmărește aducerea sau menținerea valorii mărimii de ieșire dintr-un proces la o valoare de referință în mod automat, fără intervenția omului, pe baza unei legi de reglare. Un SRA este format din două elemente: o dispozitivul de automatizare - cu rolul de a primi informație referitoare la starea curentă a
procesului reglat, și de a genera comenzi convenabile, în vederea menținerii sau aducerii ieșirii acestuia la o anumită valoare dorită (de referință);
o procesul de automatizat (de reglat). Dispozitivul de automatizare cuprinde în structura sa traductorul - ce furnizează informația cu privire la valoarea curentă a ieșirii procesului, regulatorul - ce generează comenzile astfel încât să se îndeplinească obiectivul reglării (menținerea sau aducerea stării curente a unui proces într-o anumită stare de referință) și elementul de execuție - ce are rolul de a aplica comanda regulatorului, în proces. Un SRA poate funcționa pe baza principiului reglării după efect și principiului reglării după cauză. În funcție de principiul reglării care stă la baza legii de reglare, un SRA poate fi după efect sau după cauză. În continuare sunt prezentate câteva aspecte de principiu referitoare la aceste două tipuri de sisteme de reglare automată, precum și câteva exemple de sisteme folosite pentru reglarea unor parametrii tehnologici.
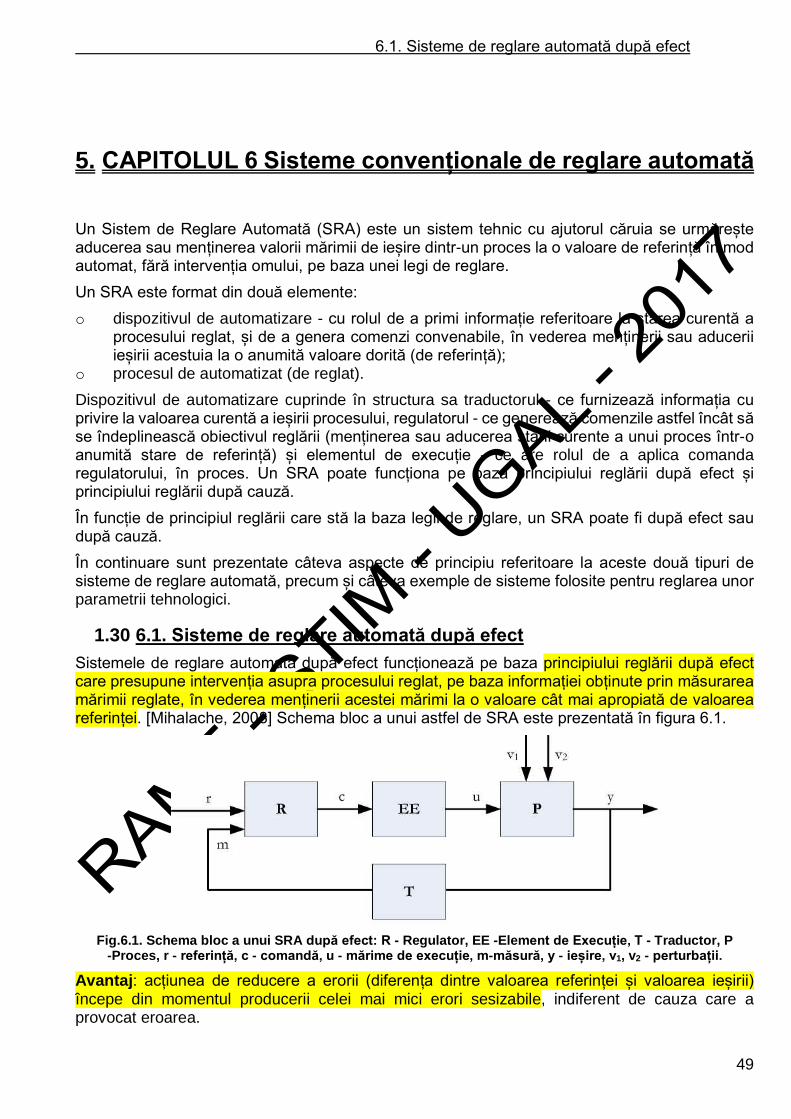
1.30 6.1. Sisteme de reglare automată după efect Sistemele de reglare automată după efect funcționează pe baza principiului reglării după efect care presupune intervenția asupra procesului reglat, pe baza informației obținute prin măsurarea mărimii reglate, în vederea menținerii acestei mărimi la o valoare cât mai apropiată de valoarea referinței. [Mihalache, 2008] Schema bloc a unui astfel de SRA este prezentată în figura 6.1.
Fig.6.1. Schema bloc a unui SRA după efect: R - Regulator, EE -Element de Execuție, T - Traductor, P
-Proces, r - referință, c - comandă, u - mărime de execuție, m-măsură, y - ieșire, v1, v2 - perturbații.
Avantaj: acțiunea de reducere a erorii (diferența dintre valoarea referinței și valoarea ieșirii) începe din momentul producerii celei mai mici erori sesizabile, indiferent de cauza care a provocat eroarea.
49
CAPITOLUL 6 Sisteme convenționale de reglare automată
Dezavantaj: apariția erorii nu poate fi prevenită.
Regulatorul după efect are implementat, de obicei, algoritmul PID, comanda (c) fiind generată prin prelucrarea erorii curente (e = r - m), astfel:
(6.1) în care: kp - este factorul de proporționalitate; Ti - constanta de timp integrală; Td - constanta de timp derivativă; c0 - comanda în lipsa abaterii. Parametrii de acordare ai regulatorului (factorul de proporționalitate, constanta de timp integrală, constanta de timp derivativă) se aleg în funcție de tipul și caracteristicile procesului ce trebuie reglat. Un exemplu de sistem de reglare după efect este prezentat în figura 6.2.
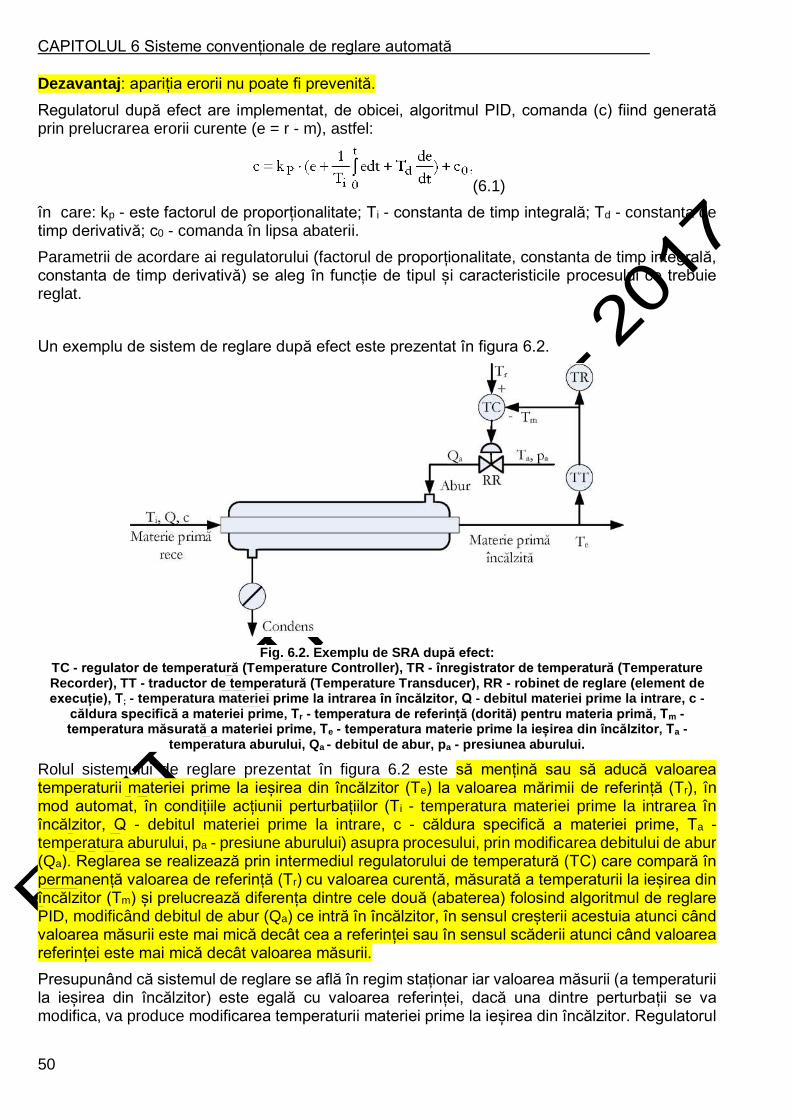
Fig. 6.2. Exemplu de SRA după efect:
TC - regulator de temperatură (Temperature Controller), TR - înregistrator de temperatură (Temperature Recorder), TT - traductor de temperatură (Temperature Transducer), RR - robinet de reglare (element de execuție), T; - temperatura materiei prime la intrarea în încălzitor, Q - debitul materiei prime la intrare, c -
căldura specifică a materiei prime, Tr - temperatura de referință (dorită) pentru materia primă, Tm - temperatura măsurată a materiei prime, Te - temperatura materie prime la ieșirea din încălzitor, Ta -
temperatura aburului, Qa - debitul de abur, pa - presiunea aburului.
Rolul sistemului de reglare prezentat în figura 6.2 este să mențină sau să aducă valoarea temperaturii materiei prime la ieșirea din încălzitor (Te) la valoarea mărimii de referință (Tr), în mod automat, în condițiile acțiunii perturbațiilor (Ti - temperatura materiei prime la intrarea în încălzitor, Q - debitul materiei prime la intrare, c - căldura specifică a materiei prime, Ta - temperatura aburului, pa - presiune aburului) asupra procesului, prin modificarea debitului de abur (Qa). Reglarea se realizează prin intermediul regulatorului de temperatură (TC) care compară în permanență valoarea de referință (Tr) cu valoarea curentă, măsurată a temperaturii la ieșirea din încălzitor (Tm) și prelucrează diferența dintre cele două (abaterea) folosind algoritmul de reglare PID, modificând debitul de abur (Qa) ce intră în încălzitor, în sensul creșterii acestuia atunci când valoarea măsurii este mai mică decât cea a referinței sau în sensul scăderii atunci când valoarea referinței este mai mică decât valoarea măsurii. Presupunând că sistemul de reglare se află în regim staționar iar valoarea măsurii (a temperaturii la ieșirea din încălzitor) este egală cu valoarea referinței, dacă una dintre perturbații se va modifica, va produce modificarea temperaturii materiei prime la ieșirea din încălzitor. Regulatorul
50
6.2. Sisteme de reglare automată după cauză
va sesiza acest lucru datorită comparării permanente a celor două mărimi și va încerca aducerea valorii temperaturii la valoarea de referință. De exemplu, atunci când temperatura materiei prime la intrarea în încălzitor sau temperatura aburului scad, temperatura materiei prime la ieșire va scădea, inevitabil. Dezavantajul acestui tip de sistem de reglare este că nu poate preveni aceste modificări ale ieșirii procesului din cauza perturbațiilor, dar imediat ce apare cea mai mică modificare la ieșire sistemul începe să acționeze în sensul anulării acestei modificări.
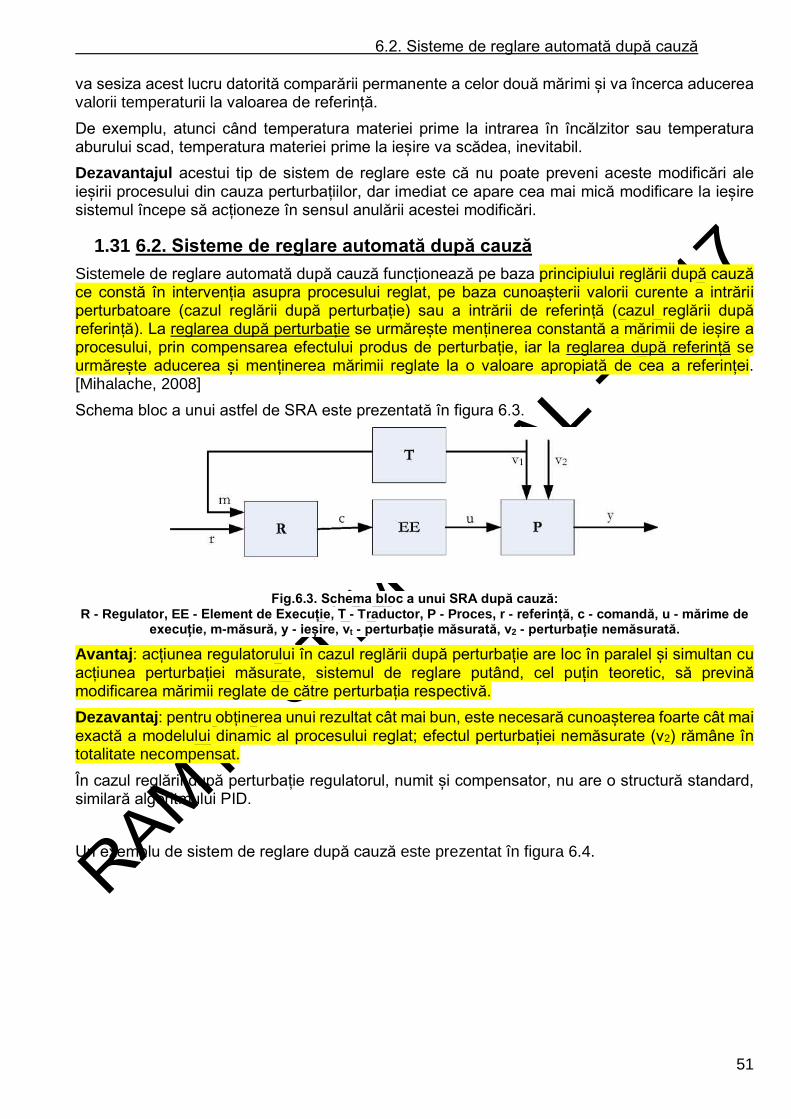
1.31 6.2. Sisteme de reglare automată după cauză Sistemele de reglare automată după cauză funcționează pe baza principiului reglării după cauză ce constă în intervenția asupra procesului reglat, pe baza cunoașterii valorii curente a intrării perturbatoare (cazul reglării după perturbație) sau a intrării de referință (cazul reglării după referință). La reglarea după perturbație se urmărește menținerea constantă a mărimii de ieșire a procesului, prin compensarea efectului produs de perturbație, iar la reglarea după referință se urmărește aducerea și menținerea mărimii reglate la o valoare apropiată de cea a referinței. [Mihalache, 2008] Schema bloc a unui astfel de SRA este prezentată în figura 6.3.
Fig.6.3. Schema bloc a unui SRA după cauză:
R - Regulator, EE - Element de Execuție, T - Traductor, P - Proces, r - referință, c - comandă, u - mărime de execuție, m-măsură, y - ieșire, vt - perturbație măsurată, v2 - perturbație nemăsurată.
Avantaj: acțiunea regulatorului în cazul reglării după perturbație are loc în paralel și simultan cu acțiunea perturbației măsurate, sistemul de reglare putând, cel puțin teoretic, să prevină modificarea mărimii reglate de către perturbația respectivă. Dezavantaj: pentru obținerea unui rezultat cât mai bun, este necesară cunoașterea foarte cât mai exactă a modelului dinamic al procesului reglat; efectul perturbației nemăsurate (v2) rămâne în totalitate necompensat. În cazul reglării după perturbație regulatorul, numit și compensator, nu are o structură standard, similară algoritmului PID. Un exemplu de sistem de reglare după cauză este prezentat în figura 6.4.
51
CAPITOLUL 6 Sisteme convenționale de reglare automată
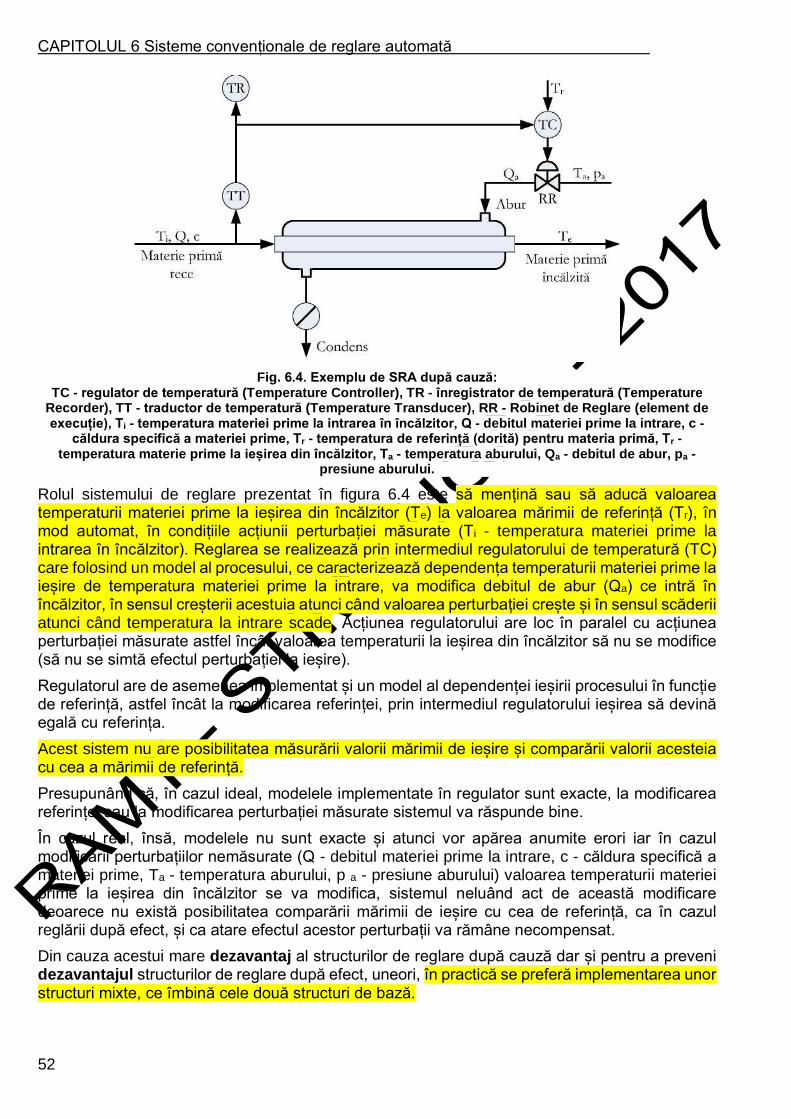
Fig. 6.4. Exemplu de SRA după cauză:
TC - regulator de temperatură (Temperature Controller), TR - înregistrator de temperatură (Temperature Recorder), TT - traductor de temperatură (Temperature Transducer), RR - Robinet de Reglare (element de execuție), Ti - temperatura materiei prime la intrarea în încălzitor, Q - debitul materiei prime la intrare, c -
căldura specifică a materiei prime, Tr - temperatura de referință (dorită) pentru materia primă, Tr - temperatura materie prime la ieșirea din încălzitor, Ta - temperatura aburului, Qa - debitul de abur, pa -
presiune aburului.
Rolul sistemului de reglare prezentat în figura 6.4 este să mențină sau să aducă valoarea temperaturii materiei prime la ieșirea din încălzitor (Te) la valoarea mărimii de referință (Tr), în mod automat, în condițiile acțiunii perturbației măsurate (Ti - temperatura materiei prime la intrarea în încălzitor). Reglarea se realizează prin intermediul regulatorului de temperatură (TC) care folosind un model al procesului, ce caracterizează dependența temperaturii materiei prime la ieșire de temperatura materiei prime la intrare, va modifica debitul de abur (Qa) ce intră în încălzitor, în sensul creșterii acestuia atunci când valoarea perturbației crește și în sensul scăderii atunci când temperatura la intrare scade. Acțiunea regulatorului are loc în paralel cu acțiunea perturbației măsurate astfel încât valoarea temperaturii la ieșirea din încălzitor să nu se modifice (să nu se simtă efectul perturbației la ieșire). Regulatorul are de asemenea implementat și un model al dependenței ieșirii procesului în funcție de referință, astfel încât la modificarea referinței, prin intermediul regulatorului ieșirea să devină egală cu referința. Acest sistem nu are posibilitatea măsurării valorii mărimii de ieșire și comparării valorii acesteia cu cea a mărimii de referință. Presupunând că, în cazul ideal, modelele implementate în regulator sunt exacte, la modificarea referinței sau la modificarea perturbației măsurate sistemul va răspunde bine. În cazul real, însă, modelele nu sunt exacte și atunci vor apărea anumite erori iar în cazul modificării perturbațiilor nemăsurate (Q - debitul materiei prime la intrare, c - căldura specifică a materiei prime, Ta - temperatura aburului, p a - presiune aburului) valoarea temperaturii materiei prime la ieșirea din încălzitor se va modifica, sistemul neluând act de această modificare deoarece nu există posibilitatea comparării mărimii de ieșire cu cea de referință, ca în cazul reglării după efect, și ca atare efectul acestor perturbații va rămâne necompensat. Din cauza acestui mare dezavantaj al structurilor de reglare după cauză dar și pentru a preveni dezavantajul structurilor de reglare după efect, uneori, în practică se preferă implementarea unor structuri mixte, ce îmbină cele două structuri de bază.
52
6.3. Sisteme de reglare automată din industrie
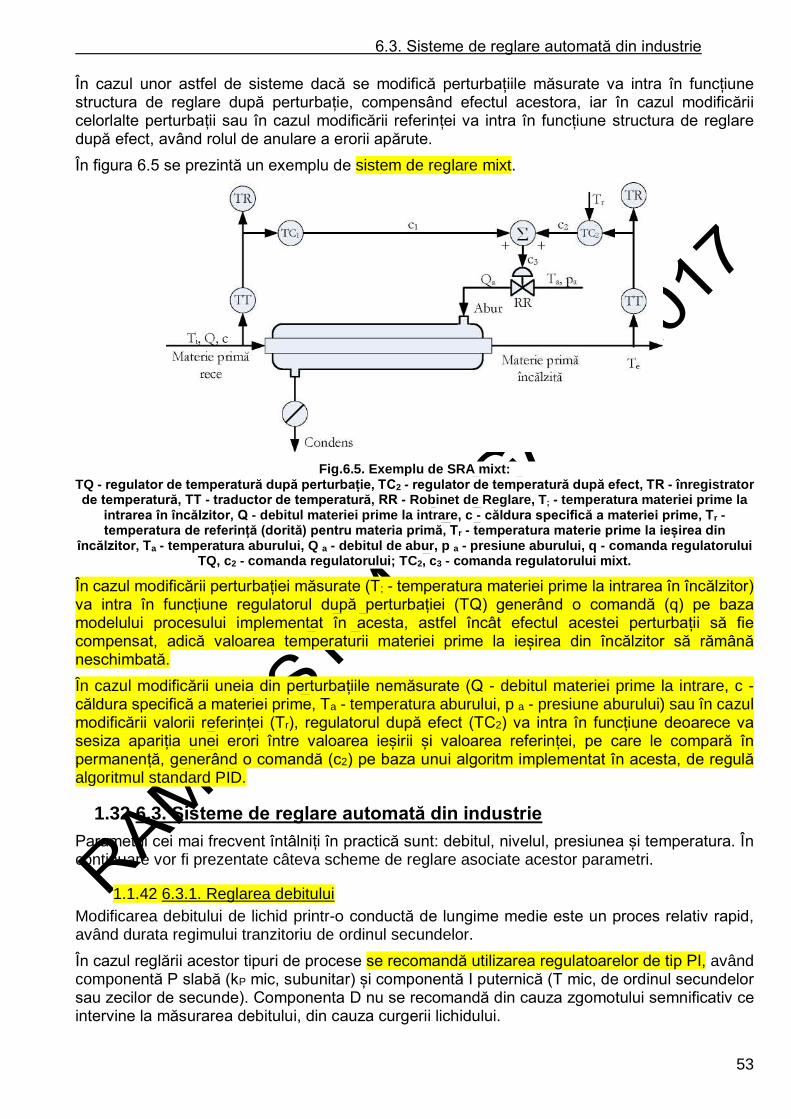
În cazul unor astfel de sisteme dacă se modifică perturbațiile măsurate va intra în funcțiune structura de reglare după perturbație, compensând efectul acestora, iar în cazul modificării celorlalte perturbații sau în cazul modificării referinței va intra în funcțiune structura de reglare după efect, având rolul de anulare a erorii apărute. În figura 6.5 se prezintă un exemplu de sistem de reglare mixt.
Fig.6.5. Exemplu de SRA mixt:
TQ - regulator de temperatură după perturbație, TC2 - regulator de temperatură după efect, TR - înregistrator de temperatură, TT - traductor de temperatură, RR - Robinet de Reglare, T; - temperatura materiei prime la
intrarea în încălzitor, Q - debitul materiei prime la intrare, c - căldura specifică a materiei prime, Tr - temperatura de referință (dorită) pentru materia primă, Tr - temperatura materie prime la ieșirea din
încălzitor, Ta - temperatura aburului, Q a - debitul de abur, p a - presiune aburului, q - comanda regulatorului TQ, c2 - comanda regulatorului; TC2, c3 - comanda regulatorului mixt.
În cazul modificării perturbației măsurate (T; - temperatura materiei prime la intrarea în încălzitor) va intra în funcțiune regulatorul după perturbației (TQ) generând o comandă (q) pe baza modelului procesului implementat în acesta, astfel încât efectul acestei perturbații să fie compensat, adică valoarea temperaturii materiei prime la ieșirea din încălzitor să rămână neschimbată. În cazul modificării uneia din perturbațiile nemăsurate (Q - debitul materiei prime la intrare, c - căldura specifică a materiei prime, Ta - temperatura aburului, p a - presiune aburului) sau în cazul modificării valorii referinței (Tr), regulatorul după efect (TC2) va intra în funcțiune deoarece va sesiza apariția unei erori între valoarea ieșirii și valoarea referinței, pe care le compară în permanență, generând o comandă (c2) pe baza unui algoritm implementat în acesta, de regulă algoritmul standard PID.
1.32 6.3. Sisteme de reglare automată din industrie Parametrii cei mai frecvent întâlniți în practică sunt: debitul, nivelul, presiunea și temperatura. În continuare vor fi prezentate câteva scheme de reglare asociate acestor parametri.
1.1.42 6.3.1. Reglarea debitului Modificarea debitului de lichid printr-o conductă de lungime medie este un proces relativ rapid, având durata regimului tranzitoriu de ordinul secundelor. În cazul reglării acestor tipuri de procese se recomandă utilizarea regulatoarelor de tip PI, având componentă P slabă (kP mic, subunitar) și componentă I puternică (T mic, de ordinul secundelor sau zecilor de secunde). Componenta D nu se recomandă din cauza zgomotului semnificativ ce intervine la măsurarea debitului, din cauza curgerii lichidului.
53
CAPITOLUL 6 Sisteme convenționale de reglare automată
1.1.42.1 Reglarea debitului pompelor centrifuge
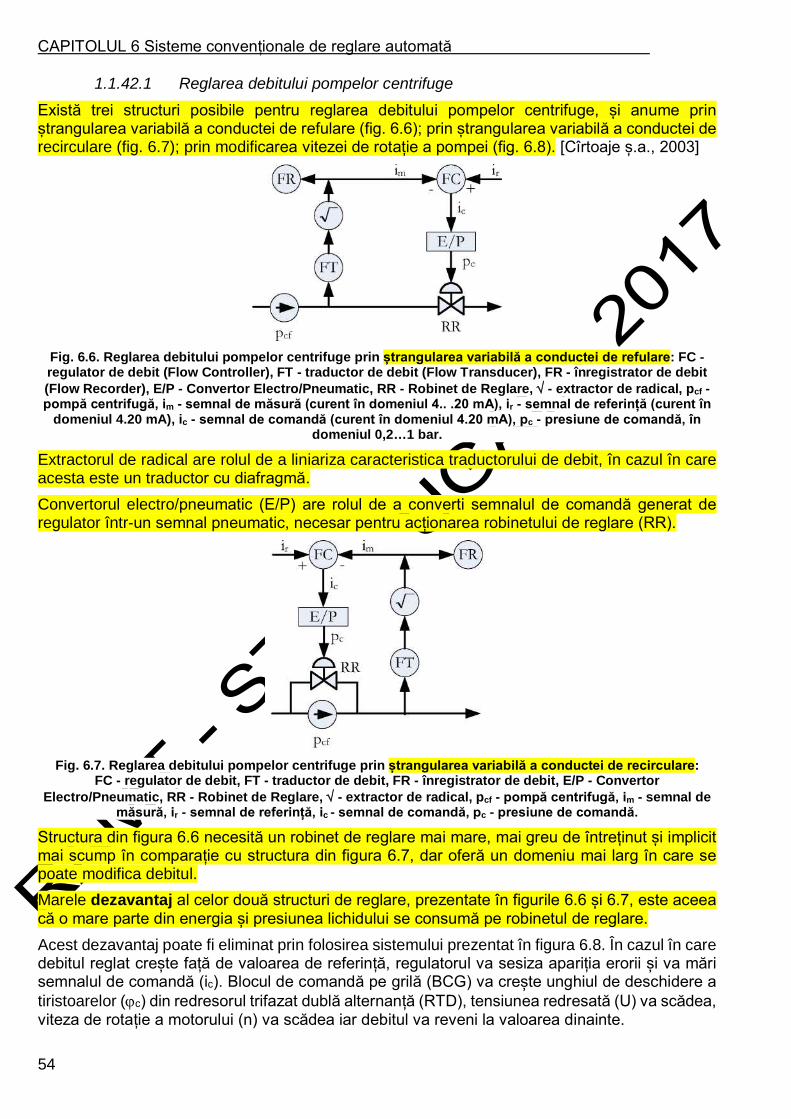
Există trei structuri posibile pentru reglarea debitului pompelor centrifuge, și anume prin ștrangularea variabilă a conductei de refulare (fig. 6.6); prin ștrangularea variabilă a conductei de recirculare (fig. 6.7); prin modificarea vitezei de rotație a pompei (fig. 6.8). [Cîrtoaje ș.a., 2003]
Fig. 6.6. Reglarea debitului pompelor centrifuge prin ștrangularea variabilă a conductei de refulare: FC - regulator de debit (Flow Controller), FT - traductor de debit (Flow Transducer), FR - înregistrator de debit (Flow Recorder), E/P - Convertor Electro/Pneumatic, RR - Robinet de Reglare, √ - extractor de radical, pcf - pompă centrifugă, im - semnal de măsură (curent în domeniul 4.. .20 mA), ir - semnal de referință (curent în
domeniul 4.20 mA), ic - semnal de comandă (curent în domeniul 4.20 mA), pc - presiune de comandă, în domeniul 0,2…1 bar.
Extractorul de radical are rolul de a liniariza caracteristica traductorului de debit, în cazul în care acesta este un traductor cu diafragmă. Convertorul electro/pneumatic (E/P) are rolul de a converti semnalul de comandă generat de regulator într-un semnal pneumatic, necesar pentru acționarea robinetului de reglare (RR).
Fig. 6.7. Reglarea debitului pompelor centrifuge prin ștrangularea variabilă a conductei de recirculare:
FC - regulator de debit, FT - traductor de debit, FR - înregistrator de debit, E/P - Convertor Electro/Pneumatic, RR - Robinet de Reglare, √ - extractor de radical, pcf - pompă centrifugă, im - semnal de
măsură, ir - semnal de referință, ic - semnal de comandă, pc - presiune de comandă.
Structura din figura 6.6 necesită un robinet de reglare mai mare, mai greu de întreținut și implicit mai scump în comparație cu structura din figura 6.7, dar oferă un domeniu mai larg în care se poate modifica debitul. Marele dezavantaj al celor două structuri de reglare, prezentate în figurile 6.6 și 6.7, este aceea că o mare parte din energia și presiunea lichidului se consumă pe robinetul de reglare. Acest dezavantaj poate fi eliminat prin folosirea sistemului prezentat în figura 6.8. În cazul în care debitul reglat crește față de valoarea de referință, regulatorul va sesiza apariția erorii și va mări semnalul de comandă (ic). Blocul de comandă pe grilă (BCG) va crește unghiul de deschidere a tiristoarelor (ϕc) din redresorul trifazat dublă alternanță (RTD), tensiunea redresată (U) va scădea, viteza de rotație a motorului (n) va scădea iar debitul va reveni la valoarea dinainte.
54
6.3. Sisteme de reglare automată din industrie
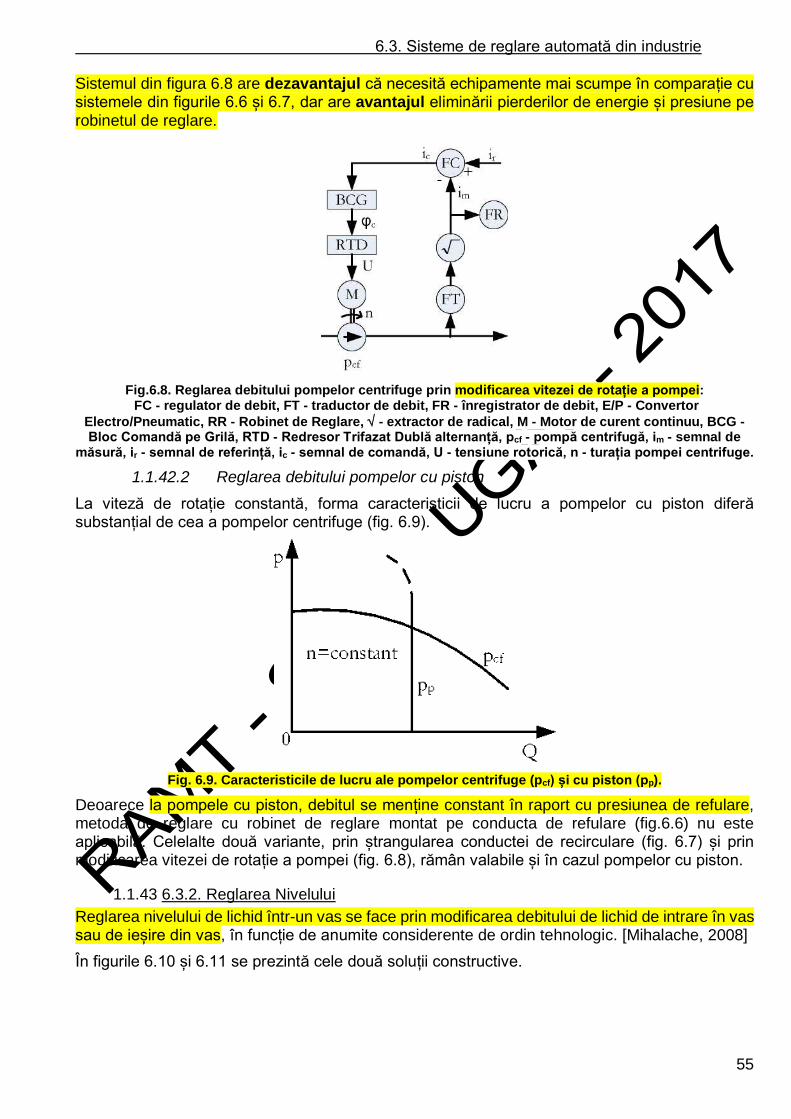
Sistemul din figura 6.8 are dezavantajul că necesită echipamente mai scumpe în comparație cu sistemele din figurile 6.6 și 6.7, dar are avantajul eliminării pierderilor de energie și presiune pe robinetul de reglare.
Fig.6.8. Reglarea debitului pompelor centrifuge prin modificarea vitezei de rotație a pompei: FC - regulator de debit, FT - traductor de debit, FR - înregistrator de debit, E/P - Convertor
Electro/Pneumatic, RR - Robinet de Reglare, √ - extractor de radical, M - Motor de curent continuu, BCG - Bloc Comandă pe Grilă, RTD - Redresor Trifazat Dublă alternanță, pcf - pompă centrifugă, im - semnal de
măsură, ir - semnal de referință, ic - semnal de comandă, U - tensiune rotorică, n - turația pompei centrifuge.
1.1.42.2 Reglarea debitului pompelor cu piston
La viteză de rotație constantă, forma caracteristicii de lucru a pompelor cu piston diferă substanțial de cea a pompelor centrifuge (fig. 6.9).
Fig. 6.9. Caracteristicile de lucru ale pompelor centrifuge (pcf) și cu piston (pp).
Deoarece la pompele cu piston, debitul se menține constant în raport cu presiunea de refulare, metoda de reglare cu robinet de reglare montat pe conducta de refulare (fig.6.6) nu este aplicabilă. Celelalte două variante, prin ștrangularea conductei de recirculare (fig. 6.7) și prin modificarea vitezei de rotație a pompei (fig. 6.8), rămân valabile și în cazul pompelor cu piston.
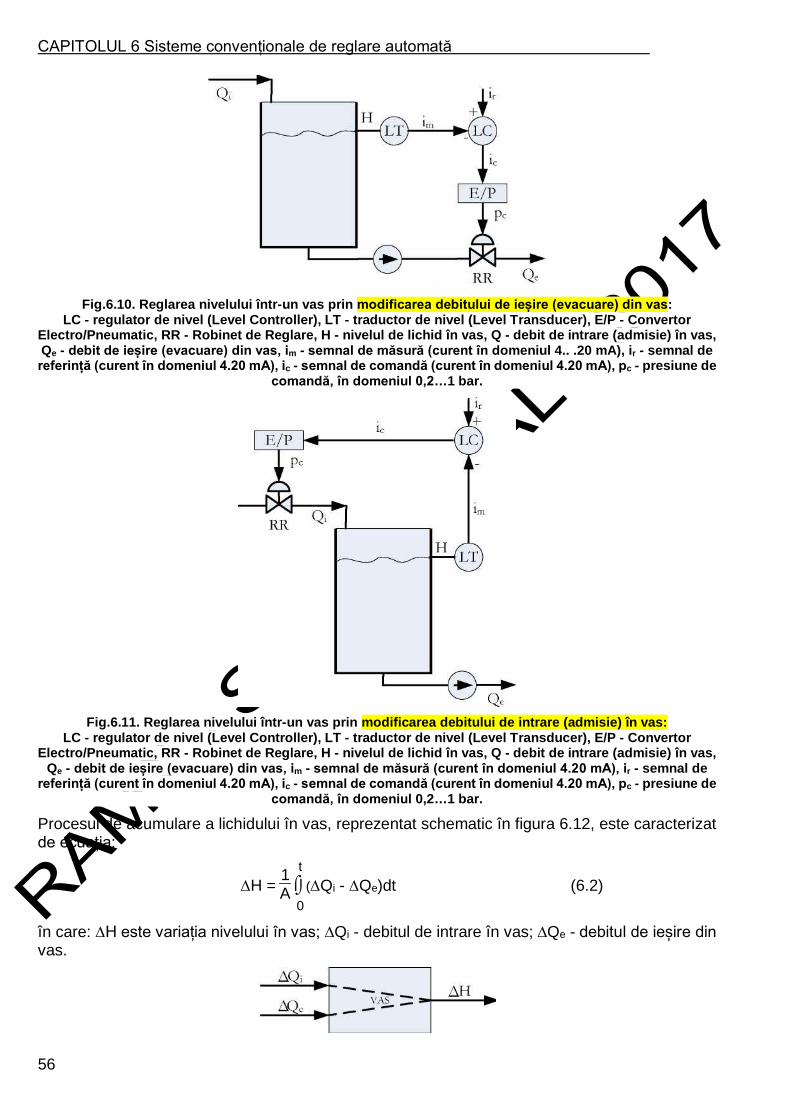
1.1.43 6.3.2. Reglarea Nivelului Reglarea nivelului de lichid într-un vas se face prin modificarea debitului de lichid de intrare în vas sau de ieșire din vas, în funcție de anumite considerente de ordin tehnologic. [Mihalache, 2008] În figurile 6.10 și 6.11 se prezintă cele două soluții constructive.
55
CAPITOLUL 6 Sisteme convenționale de reglare automată
Fig.6.10. Reglarea nivelului într-un vas prin modificarea debitului de ieșire (evacuare) din vas:
LC - regulator de nivel (Level Controller), LT - traductor de nivel (Level Transducer), E/P - Convertor Electro/Pneumatic, RR - Robinet de Reglare, H - nivelul de lichid în vas, Q - debit de intrare (admisie) în vas, Qe - debit de ieșire (evacuare) din vas, im - semnal de măsură (curent în domeniul 4.. .20 mA), ir - semnal de referință (curent în domeniul 4.20 mA), ic - semnal de comandă (curent în domeniul 4.20 mA), pc - presiune de
comandă, în domeniul 0,2…1 bar.
Fig.6.11. Reglarea nivelului într-un vas prin modificarea debitului de intrare (admisie) în vas:
LC - regulator de nivel (Level Controller), LT - traductor de nivel (Level Transducer), E/P - Convertor Electro/Pneumatic, RR - Robinet de Reglare, H - nivelul de lichid în vas, Q - debit de intrare (admisie) în vas,
Qe - debit de ieșire (evacuare) din vas, im - semnal de măsură (curent în domeniul 4.20 mA), ir - semnal de referință (curent în domeniul 4.20 mA), ic - semnal de comandă (curent în domeniul 4.20 mA), pc - presiune de
comandă, în domeniul 0,2…1 bar.
Procesul de acumulare a lichidului în vas, reprezentat schematic în figura 6.12, este caracterizat de ecuația:
∆H = 1A ⌡⌠
0
t(∆Qi - ∆Qe)dt (6.2)
în care: ∆H este variația nivelului în vas; ∆Qi - debitul de intrare în vas; ∆Qe - debitul de ieșire din vas.
56
6.3. Sisteme de reglare automată din industrie
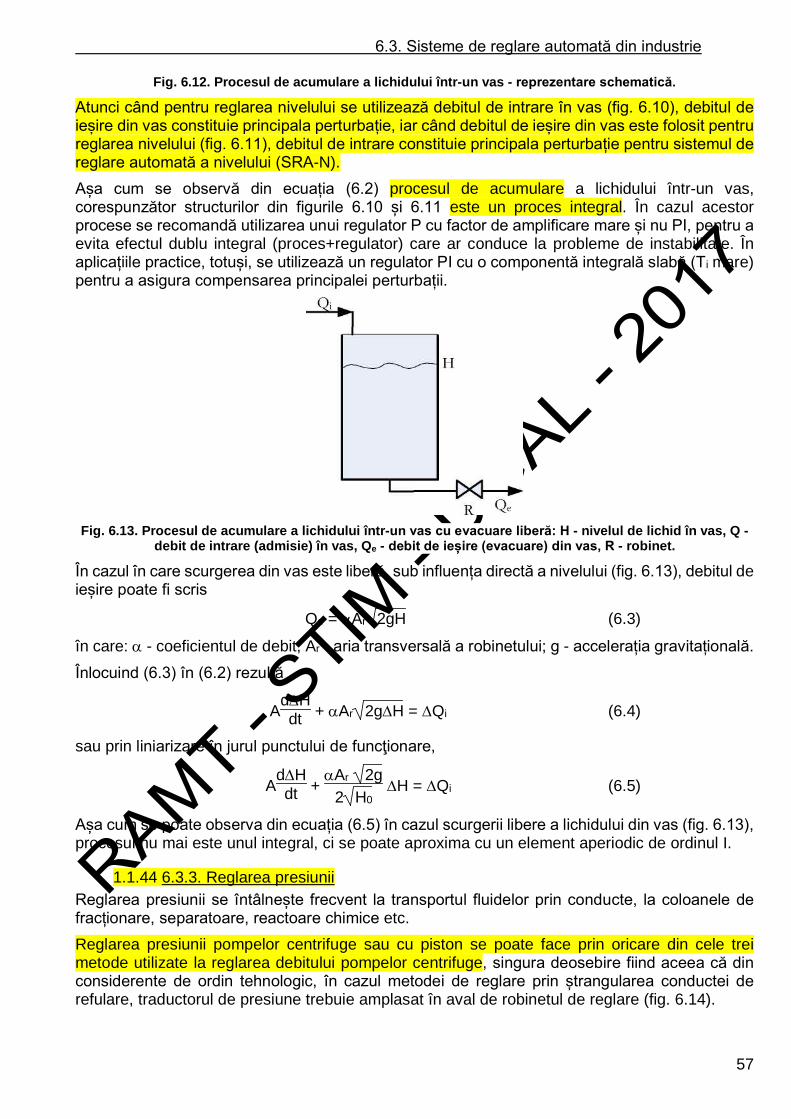
Fig. 6.12. Procesul de acumulare a lichidului într-un vas - reprezentare schematică.
Atunci când pentru reglarea nivelului se utilizează debitul de intrare în vas (fig. 6.10), debitul de ieșire din vas constituie principala perturbație, iar când debitul de ieșire din vas este folosit pentru reglarea nivelului (fig. 6.11), debitul de intrare constituie principala perturbație pentru sistemul de reglare automată a nivelului (SRA-N). Așa cum se observă din ecuația (6.2) procesul de acumulare a lichidului într-un vas, corespunzător structurilor din figurile 6.10 și 6.11 este un proces integral. În cazul acestor procese se recomandă utilizarea unui regulator P cu factor de amplificare mare și nu PI, pentru a evita efectul dublu integral (proces+regulator) care ar conduce la probleme de instabilitate. În aplicațiile practice, totuși, se utilizează un regulator PI cu o componentă integrală slabă (Ti mare) pentru a asigura compensarea principalei perturbații.
Fig. 6.13. Procesul de acumulare a lichidului într-un vas cu evacuare liberă: H - nivelul de lichid în vas, Q -
debit de intrare (admisie) în vas, Qe - debit de ieșire (evacuare) din vas, R - robinet.
În cazul în care scurgerea din vas este liberă, sub influența directă a nivelului (fig. 6.13), debitul de ieșire poate fi scris
Qe = αAr 2gH (6.3)
în care: α - coeficientul de debit; Ar - aria transversală a robinetului; g - accelerația gravitațională.
Înlocuind (6.3) în (6.2) rezultă
Ad∆Hdt + αAr 2g∆H = ∆Qi (6.4)
sau prin liniarizare în jurul punctului de funcţionare,
Ad∆Hdt +
αAr 2g2 H0
∆H = ∆Qi (6.5)
Așa cum se poate observa din ecuația (6.5) în cazul scurgerii libere a lichidului din vas (fig. 6.13), procesul nu mai este unul integral, ci se poate aproxima cu un element aperiodic de ordinul I.
1.1.44 6.3.3. Reglarea presiunii Reglarea presiunii se întâlnește frecvent la transportul fluidelor prin conducte, la coloanele de fracționare, separatoare, reactoare chimice etc. Reglarea presiunii pompelor centrifuge sau cu piston se poate face prin oricare din cele trei metode utilizate la reglarea debitului pompelor centrifuge, singura deosebire fiind aceea că din considerente de ordin tehnologic, în cazul metodei de reglare prin ștrangularea conductei de refulare, traductorul de presiune trebuie amplasat în aval de robinetul de reglare (fig. 6.14).
57
CAPITOLUL 6 Sisteme convenționale de reglare automată
În cazul transportului lichidelor, dinamica sistemelor de reglare a presiunii este comparabilă cu cea a sistemelor de reglare a debitului, regulatoarele utilizate fiind de tip P sau PI, iar în cazul fluidelor compresibile, dinamica procesului fiind mai lentă regulatoarele pot fi de tip P, PI, PID.
Fig.6.14. Reglarea presiunii prin ștrangularea variabilă a conductei de refulare:
PC - regulator de presiune (Pressure Controller), PT - traductor de presiune (Pressure Transducer), PR - înregistrator de presiune (Pressure Recorder), E/P - Convertor Electro/Pneumatic, RR - Robinet de Reglare, im - semnal de măsură (curent în domeniul 4.. .20 mA), ir - semnal de referință (curent în domeniul 4.. .20 mA),
ic - semnal de comandă (curent în domeniul 4.20 mA), pc - presiune de comandă, în domeniul 0,2…1 bar.
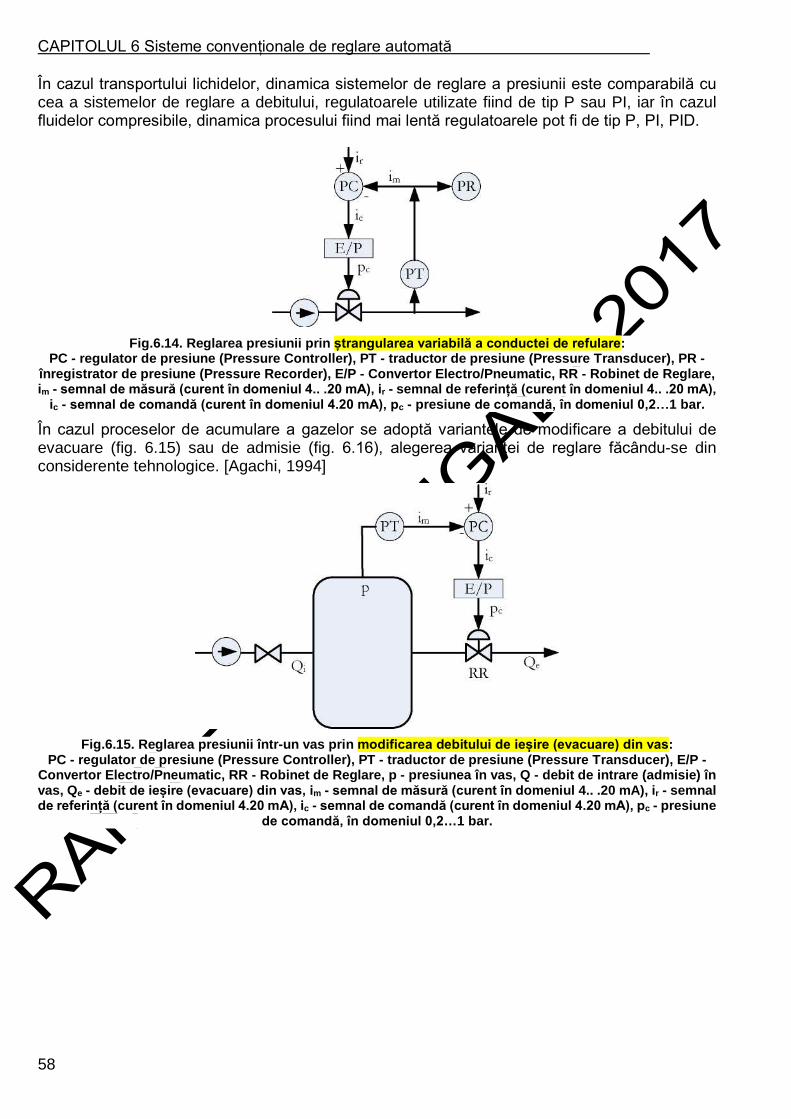
În cazul proceselor de acumulare a gazelor se adoptă variantele de modificare a debitului de evacuare (fig. 6.15) sau de admisie (fig. 6.16), alegerea variantei de reglare făcându-se din considerente tehnologice. [Agachi, 1994]
Fig.6.15. Reglarea presiunii într-un vas prin modificarea debitului de ieșire (evacuare) din vas:
PC - regulator de presiune (Pressure Controller), PT - traductor de presiune (Pressure Transducer), E/P - Convertor Electro/Pneumatic, RR - Robinet de Reglare, p - presiunea în vas, Q - debit de intrare (admisie) în vas, Qe - debit de ieșire (evacuare) din vas, im - semnal de măsură (curent în domeniul 4.. .20 mA), ir - semnal de referință (curent în domeniul 4.20 mA), ic - semnal de comandă (curent în domeniul 4.20 mA), pc - presiune
de comandă, în domeniul 0,2…1 bar.
58
6.3. Sisteme de reglare automată din industrie
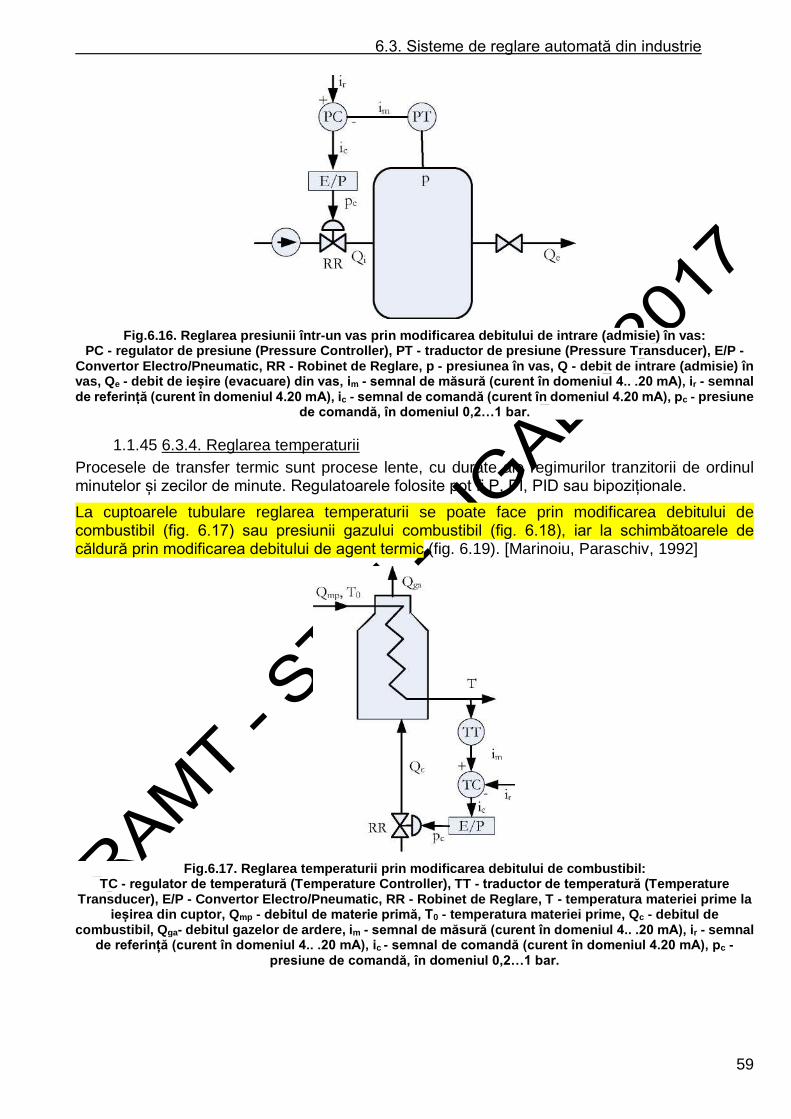
Fig.6.16. Reglarea presiunii într-un vas prin modificarea debitului de intrare (admisie) în vas:
PC - regulator de presiune (Pressure Controller), PT - traductor de presiune (Pressure Transducer), E/P - Convertor Electro/Pneumatic, RR - Robinet de Reglare, p - presiunea în vas, Q - debit de intrare (admisie) în vas, Qe - debit de ieșire (evacuare) din vas, im - semnal de măsură (curent în domeniul 4.. .20 mA), ir - semnal de referință (curent în domeniul 4.20 mA), ic - semnal de comandă (curent în domeniul 4.20 mA), pc - presiune
de comandă, în domeniul 0,2…1 bar.
1.1.45 6.3.4. Reglarea temperaturii Procesele de transfer termic sunt procese lente, cu durate ale regimurilor tranzitorii de ordinul minutelor și zecilor de minute. Regulatoarele folosite pot fi P, PI, PID sau bipoziționale. La cuptoarele tubulare reglarea temperaturii se poate face prin modificarea debitului de combustibil (fig. 6.17) sau presiunii gazului combustibil (fig. 6.18), iar la schimbătoarele de căldură prin modificarea debitului de agent termic (fig. 6.19). [Marinoiu, Paraschiv, 1992]
Fig.6.17. Reglarea temperaturii prin modificarea debitului de combustibil:
TC - regulator de temperatură (Temperature Controller), TT - traductor de temperatură (Temperature Transducer), E/P - Convertor Electro/Pneumatic, RR - Robinet de Reglare, T - temperatura materiei prime la
ieșirea din cuptor, Qmp - debitul de materie primă, T0 - temperatura materiei prime, Qc - debitul de combustibil, Qga- debitul gazelor de ardere, im - semnal de măsură (curent în domeniul 4.. .20 mA), ir - semnal
de referință (curent în domeniul 4.. .20 mA), ic - semnal de comandă (curent în domeniul 4.20 mA), pc - presiune de comandă, în domeniul 0,2…1 bar.
59
CAPITOLUL 6 Sisteme convenționale de reglare automată
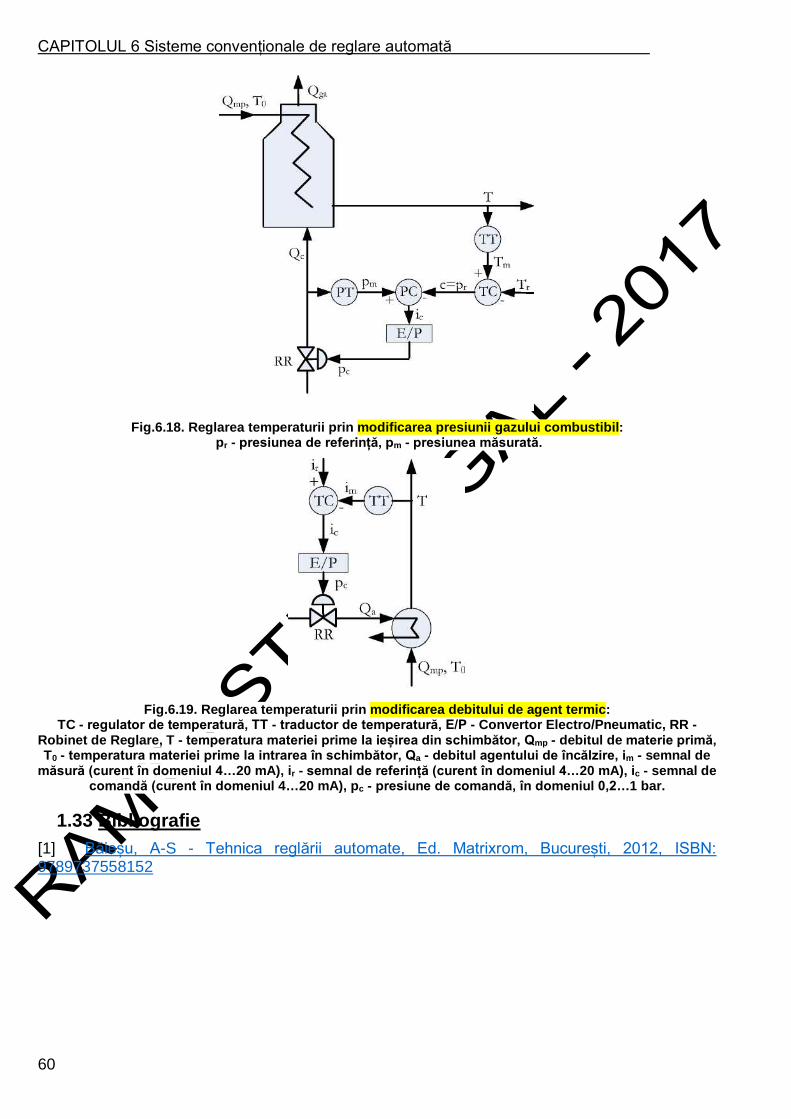
Fig.6.18. Reglarea temperaturii prin modificarea presiunii gazului combustibil:
pr - presiunea de referință, pm - presiunea măsurată.
Fig.6.19. Reglarea temperaturii prin modificarea debitului de agent termic:
TC - regulator de temperatură, TT - traductor de temperatură, E/P - Convertor Electro/Pneumatic, RR - Robinet de Reglare, T - temperatura materiei prime la ieșirea din schimbător, Qmp - debitul de materie primă, T0 - temperatura materiei prime la intrarea în schimbător, Qa - debitul agentului de încălzire, im - semnal de
măsură (curent în domeniul 4…20 mA), ir - semnal de referință (curent în domeniul 4…20 mA), ic - semnal de comandă (curent în domeniul 4…20 mA), pc - presiune de comandă, în domeniul 0,2…1 bar.
1.33 Bibliografie [1] Băieșu, A-S - Tehnica reglării automate, Ed. Matrixrom, București, 2012, ISBN: 9789737558152
60


















