Didactic 1 1 1 .Ro Ghidulinvatatoruluisicaietulelevuluipentruclaseleiii IV
description

Mecanisme ANALIZA CINEMATICA A MECANISMELOR PLANE – Lucrare de laborator 2
Tema. Analiza cinematica a mecanismelor plane prin utilizarea unui algoritm grafic.1.Generalitati.Analiza cinematica a mecanismelor succede sintezei cinematice a acestora, respectiv etapei in
care s-au stabilit ori s-au convenit care si citi parametri cinematici sint necesari a fi determinati pentru a cunoaste si a satisface necesitatile constructiv – functionale ale mecanismelor pe care se structureaza un anumit sistem mecanic mobil conceput si realizat pentru un anumit scop ( scop definit prin documentatia tehnica a sistemului ) .
Parametri cinematici sint : pozitii, viteze , acceleratii pentru anumite puncte ce apartin unor anumite elemente cinematice, sau unor cuple cinematice , sau a unor anumite elemente respectiv lanturi cinematice din structura acelor sisteme.
Parametri cinematic cunoscuti, identificati ca date intrare (parametri cunoscuti in faza initiala, faza de inceput a analizei) sunt urmatorii:
a) schema cinematica (reprezentare la scara , prin semen conventionale ) a meca- nismului; prin aceasta schema se dau absolut toate dimensiunile esentiale ale elementelor, amplasarea absoluta si cea relativa – doar pentru o singura pozitie , pozitie determinate de elementul / elementele conducatoare – a cuplelor în raport cu elementele si cu sistemul de referinta ales ;s
b) pozitia si starea de miscare a elementelor conducatoare identificate prin : - spatii parcurse de puncte situate pe elementul/elementele conducatoare sau motoare; pot fi
si spatii parcurse de aceste elemente in anumite conditii de constringeri impuse de familia mecanismului sau de cuplele cinematice ce apartin acestor elemente;
- spatii orientate parcurse de puncte situate pe elementul/elementele conducatoare sau motoare; pot fi si spatii orientate parcurse de aceste elemente in anumite conditii de constringeri impuse de familia mecanismului sau de cuplele cinematice ce apartin acestor elemente;
- vitezele unor puncte de pe elementul/elementele conducatoare cind acestea executa miscari pe traiectorii liniare; pot fi si viteze ale acestor elemente in anumite conditii de constringeri impuse de familia mecanismului sau de cuplele cinematice ce apartin acestor elemente;
- acceleratiile unor puncte de pe elementul/elementele conducatoare cind acestea executa miscari pe traiectorii liniare; pot fi si acceleratii ale acestor elemente in anumite conditii de constringeri impuse de familia mecanismului sau de cuplele cinematice ce apartin acestor elemente;
- unghiuri parcurse de elemntul/elementele conducatoare atunci cind acestea executa miscari de rotatie;
- vitezele unghiulare ale elementului/elementelor conducatoare atunci cind acestea executa miscari de rotatie;
- acceleratiile unghiulare ale elementului/elementelor conducatoare atunci cind acestea executa miscari de rotatie;
Parametri cinematici necunoscuti, identificati ca date de iesire dintr-un algoritm de analiza cinematic a mecanismului dat, parametri ce urmeaza a fi determinate sunt urmatorii:
- spatii parcurse de puncte situate pe elementul/elementele conduse sau „de interes’’; pot fi si
spatii parcurse de aceste elemente in anumite conditii de constringeri impuse de familia mecanismului sau de cuplele cinematice ce apartin acestor elemente;
- spatii orientate parcurse de puncte situate pe elementul/elementele conduse sau „de
interes’’; pot fi si spatii orientate parcurse de aceste elemente in anumite conditii de constringeri impuse de familia mecanismului sau de cuplele cinematice ce apartin acestor elemente;
- vitezele unor puncte de pe elementul/elementele conduse sau „de interes’’ cind
acestea executa miscari pe traiectorii liniare; pot fi si viteze ale acestor elemente in anumite conditii de constringeri impuse de familia mecanismului sau de cuplele cinematice ce apartin acestor elemente;
- acceleratiile unor puncte de pe elementul/elementele conduse sau „de interes’’ cind acestea
executa miscari pe traiectorii liniare; pot fi si acceleratii ale acestor elemente in anumite conditii de constringeri impuse de familia mecanismului sau de cuplele cinematice ce apartin acestor elemente;
29

Mecanisme ANALIZA CINEMATICA A MECANISMELOR PLANE – Lucrare de laborator 2
- unghiuri parcurse de elemntul/elementele conduse sau „de interes’’ atunci cind acestea
executa miscari de rotatie;
- vitezele unghiulare ale elementului/elementelor conduse sau „de interes’’ atunci cind
acestea executa miscari de rotatie;
- acceleratiile unghiulare ale elementului/elementelor conduse sau „de interes’’ atunci cind
acestea executa miscari de rotatie;
1.1.Pozitii si/sau stari pozitionale.Starea pozitionala a elementelor cinematice din structura sistemelor mecanice mobile sau altfel
spus a mecanismelor se defineste prin parametri pozitionali ce tin seama in general de miscarea pe care urmeaza sa o efectueze elementul sau punctul respectiv.
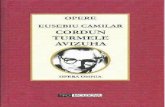
Astfel, daca elementul executa o miscare de rotatie in jurul unui punct de pe cupla de rotatie A, figura 1,a, starea pozitionala a cestui element este determinate de coordonatele carteziene (xA,yA) a punctului A si de unghiul variabil φ masurat in general de la axa Ox; daca pe acest element este necesar sa stabilim starea pozitionala a oricarui alt punct este necesar sa se cunoasca o lungimea l orientata sau nu ca distatnta de la punctual A definit ca mai sus si punctul orecare M.
Daca elementul executa o miscare plan-paralela, figura 1,b, starea pozitionala a ele- mentului este determinate de coordonatele (xA,yA) , (xB,yB) a doua puncte A , B situate pe cuplele cinematice cu aceleasi notatii. Desi pare a fi o supra-determinare de obicei se indica ca parametru cinematic si lungimea l a elementului, nefiind o lungime de segment mate- matic.
Fig.1. Definirea starii pozitionale a unui element in miscare de rotatie (a) siin miscare plan - paralela (b).
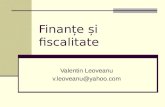
Daca elementul executa o miscare de translatie , starea sa pozitionala este determi- nata prin parametri specifici acestui tip de miscare. Consideram ca elementul 1 este in mis- care de translatie, miscare permisa de cupla – culisa a acestui element, figura 2.
Considerind ca un punct “de interes” de pe acest element este B, pozitia sa strict legata de elemental 1 este determinate prin coodonatele (xAp,yAp) a unui punct AP situat intr-un plan P solidar cu ghidajul x-x orientat sub unghiul α fata de axa Ox a sistemului de referinta xOy fix si un
vector avind extremitatile in A respectiv B, cu orientare spre B. Alegerea unui astfel de vector este
posibila si este o modalitate de a simplifica correct din punct de vedere mathematic algoritmul de analiza cinematic a elementului 1, ghidajul ocupind o orientare constanta.
Punctul B poate fi considerat ca fiind “de interes” deoarece prin cupla situata aici se leaga urmatorul element cinematic (2) din mecanism.
Daca punctul “de interes” este situat chiar pe ghidajul x-x, punctul fiind notat cu Bx, starea sa pozitionala va fi determinata de coordonatele (xAx,yAx) a unui punct Ax situat chiar pe ghidaj si un vector
orientat chiar pe directia ghidajului cu sensul spre Bx, vectorul fiind .
Nota. Parametri analizei cinematice aferenti starii pozitionale, detaliati in maniera de mai sus, atit cei care se identifica ca date de intrare cit si cei care se identifica ca date de iesire, determina pozitii univoce/(univoc determinate) pentru orice punct de pe oricare din elementele sistemului mecanic mobil. In acest fel este garantata si determinabilitatea sistemului respectiv desmodromia acestuia.
30

Mecanisme ANALIZA CINEMATICA A MECANISMELOR PLANE – Lucrare de laborator 2
Fig.2. Definirea starii pozitionale a unui element in miscare de translatie.
1.2. Viteze si starile de viteze. Starea cinematica a unui sistem mecanic mobil este cunoscuta daca se cunosc starile cinematice
din punct de vedere a vitezelor a fiecarei grupe din acest sistem; starea cinematica a unei grupe cinematice este cunoscuta daca se cunoste starea cinematica din punct de vedere a vitezelor a fiecarui element din grupa; in sfirsit, starea cinematica a unui element din punct de vedere a vitezelor este cunoscuta daca se cunosc fie vitezele liniare a doua puncte de pe acel element fie viteza liniara a unui punct de pe element si viteza unghiulara de rotatie a elementului in jurul acelui punct.
Când punctul are viteza liniara egala cu zero, acel punct ecte CIR (Centrul Instantaneu de Rotatie) al elementului. Când , elementul efectueaza o translatie pura, având CIR punct de la determinat de directia perpendiculara pe cea a ghidajului.
Intr-o speculatie matematica se poate spune ca translatia pura este o rotatie in jurul unui punct situat la ; dupa cum, similar, dreapta este un cerc degenerat care are centrul situat la .
1.3. Acceleratii si distributii de acceleratii. Starea cinematica a unui sistem mecanic mobil este cunoscuta daca se cunosc starile cinematice
din punct de vedere a acceleratiilor a fiecarei grupe din acest sistem; starea cinematica a unei grupe cinematice este cunoscuta daca se cunoste starea cinematica din punct de vedere a acceleratiilor a fiecarui element din grupa; in sfirsit, starea cinematica a unui element din punct de vedere a acceleratiilor este cunoscuta daca se cunosc fie acceleratiile liniare a doua puncte de pe acel element fie acceleratia liniara a unui punct de pe element si viteza si acceleratia unghiulara de rotatie a elementului in jurul acelui punct.
Daca elementul executa miscare de translatie, starea cinematica din punct de vedere a acceleratiilor este cunoscuta daca se cunoaste acceleratia liniara a unui punct de pe ghidaj, viteza unghiulara a ghidajului si viteza de translatie relativa ( o pseudo viteza de transport ) a elementului fata de un punct de pe ghidaj. Aceste viteze sint definitorii in determinarea componentelor Coriolis respectiv de „transport’’ a acceleratiei unui punct situat pe elementul aflat in miscare de translatie.
2.Notiuni de mecanica teoretica aplicate în Stiinta Masinilor si Mecanismelor.Algoritmul de analiza cinematica a sistemelor mecanice mobile, simplu mecanisme, are diferite
structuri.Un tip de structura este data de analiza cinematica a mecanismelor prin metode grafo-analitice Alt tip este determinat de veritabile metode analitice, metode care isi au insa geneza in metode-
le grafo – analitice reconsiderate in urma posibilitatilor oferite de tehnicile computerizate de rezolvare a sistemelor complexe, cu mai multe ecuatii, cu ecuatii matematice compuse, cu ecuatii diferentiale etc.
31

Mecanisme ANALIZA CINEMATICA A MECANISMELOR PLANE – Lucrare de laborator 2
Apoi trebuie mentionati algoritmii structurati pe tehnici matematice matriciale. Pentru fiecare din acesti algoritmi s-au dezvoltat programe si soft–uri din ce in ce mai performante, mai complete si mai operative.
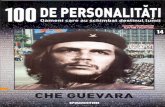
2.1.Notiuni legate de viteze si acceleratii. Daca luam in considerare cazul in care un element 2 executa o miscare de rotatie fie in jurul
unui punct A mobil - elementul 1 mobil , figura 3,a, fie in jurul unui punct A fix – elementul 1 fix, figura 3,b, daca viteza punctului A este cunoscuta (ea putind fi zero ca in cazul figurii 3,b,) si se cunoaste si
viteza unghiulara ecuatiile de viteze si
Fig.3.Element in miscare de rotatie.
acceleratii pentru 2 puncte distincte (A si B) aflate pe un acelasi element (2) sint in succesiune urmatoarele:
; unde : ; ;
; unde :
;
Daca consideram ca un element 3 executa o miscare de translatie fata de elementul 2 ecuatiile de viteze si acceleratii pentru 2 puncte situate fiecare pe elementul corespunzator, B2 (2), B3 (3) se structureaza cu urmatoarele detalieri. Se considera cele doua puncte suprapuse asa cum se vede in
Fig.4. Elementul executa o miscare de translatie.
figura 4,a; intre cele doua elemente exista numai miscare de translatie, ele executind o eventuala
miscare de rotatie in jurul unui punct de pe ghidajul x-x cu aceeasi viteza unghiulara ; ecuatiile
se sacriu in conformitate cu detaliul din figura 4,b, unde se poate constata ca , pentru ca punctele B2
(2), B3 (3) sa ajunga in starea din figura 4,a, elemntul 3 cu punctual B3 poate efectua numai translatie fata de B2 (2), nefiind nici necesara o alta miscare. De mentionat ca punctele B sint suprapuse geometric dar distincte mecanic, ele apartinând la 2 elemente diferite (B2 2, B3 3) au si miscari diferite, intre ele existind doar o miscare relativa de translatie.
Ecuatiile de tip Euler pentru viteze si acceleratii , in succesiune sint urmatoarele :
; unde : ;
; unde : ;
32

Mecanisme ANALIZA CINEMATICA A MECANISMELOR PLANE – Lucrare de laborator 2
Pentru a stabili directia si sensul acceleratiei se aplica metoda memotehnica care asa cum
se stie consta in a rabate cu 900 viteza relative ce poarta aceeasi indici in sensul vitezei unghiulare a ghidajului, adica in sensul vitezei unghiulare , figura 4,c; component relative a cceleratiei este
2.2.Figuri direct asemenea si figuri invers asemenea.Datorita faptului ca prin reprezentarea vectoriala a ecuatiilor Euler aferente vitezelor si
acceleratiilor diferitelor puncte de pe elementele cinematice ale mecanismelor plane se obtin figuri geometrice poligonale la o anumita scara de conversie a unitatilor de masura a parametrilor cinematici (viteze, acceleratii) aceste figuri vor rezulta fie direct asemenea fie invers asemenea. Adica, daca spre exemplu virfurile A,B,C ale triunghiului se vor regasi ca notatii ale unor cuple cinematice pe schema cinematica a mecanismului, atunci vitezele sau acceleratiile acestor puncte se vor regasi in poligonul vectorilor viteze sau acceleratii in aceeasi succesiune la parcurgerea in acelasi sens a figurii geometrice ce rezulta in acel poligon. Daca sensul de parcurgere a figurii geometrice ce rezulta in poligonul vectorilor viteze sau acceleratii este in sens contrar celui de citire a figurii din planul mecanismului se spune ca avem figuri invers asemenea. Astef, in figura 5,a, se observa ca notatiile A,B,C sint in aceeasi succesiune cu a,b,c. Deci ABC este direct asemenea cu abc. In acelasi rationament se deduce ca triunghiurile din figura 5,b, sint invers asemenea.
Fig. 5.a – figuri direct asemenea; b – figuri invers asemenea.
Rapoartele de asemanare directa sint :
Teorema asemanarii. Ca o corespondenta intre doua figuri direct asemenea se poate emite urmatoarea teorema : figura formata de punctele apartinând unui element este direct asemenea cu figura formata de vârfurile vectorilor respectiv, liniare, atât atunci când vectorii sunt legati de puncte, cât si atunci când vectorii absoluti au originile concentrate într-un pol p.
33

Mecanisme ANALIZA CINEMATICA A MECANISMELOR PLANE – Lucrare de laborator 2
Fig.6. Figuri direct asemeneaABC abc (asemanare directa). Triunghiurile hasurate in acelasi sens sunt direct asemenea!
Directa asemanare este produsul unei rotatii, cu o translatie si cu o omotetie. Produsul este comutativ.
2.3. Analiza cinematica cu metoda grafo-analitica a ecuatiilor vectoriale. Rezolvarea cinematica este instantanee si corespunde deci doar unei anumite pozitii a
mecanismului, pozitie data de elementul sau elementele motoare. Aplicarea acestei metode presupune parcurgerea urmatorilor pasi:
1. Metoda consta în determinarea unor ecuatii sau sisteme de ecuatii vectoriale (care sunt valabile pentru orice pozitie a mecanismului) si apoi în rezolvarea lor grafica (care este diferita de la pozitie la pozitie).
2. Vectorii viteze si acceleratii liniare sunt în mecanism, vectori legati, iar si sunt marimi conventional considerate vectori, nelegati, perpendiculari pe planul miscarii si aparinând elementului.
3. O ecuatie vectoriala este rezolvabila când contine doua necunoscute de tip scalar.4. Un sistem de doua ecuatii vectoriale este rezolvabil când contine patru necunoscute de
tip scalar.5. Necunoscutele de tip scalar, ce caracterizeaza vectorii din ecuatiile vectoriale sunt:
modulul si directia (cosinusul director).6. Sensul vectorilor este dat de semnele dintre ei (+ si =) din ecuatiile vectoriale.7. Pentru rezolvarea grafica se adopta concentrarea originilor tuturor vectorilor absoluti
într-un pol notat cu pv sau pa (pentru rezolvarea de viteze, respectiv acceleratii).8. Un vector sau liniara nenul finit absolut va avea deci originea situata în pol sivârful
în planul din jurul polului. Acest plan se numeste planul vitezelor, respectiv acceleratiilor.9. Toate punctele permanent fixe, fiind de si nule, au în planul vitezelor si
acceleratiilor, atât originea cât si vârful concentrate în pol.10. Vectorii ,respectiv relative nenule, au originea si vârful neconfundate situate în
planul din jurul polului.11. Grafic, se practica insumarea vectorilor dupa regula poligonului.12. În ecuatiile vectoriale, vectorii cunoscuti complet se subliniaza cu doua linii, iar cei
având o singura necunoscuta de tip scalar se subliniaza cu o linie (sub ea indicându-se cunoscuta, iar cei complet necunoscuti nu se subliniaza.
In toate constructiile vectoriale se adopta : o scara a lungimilor , o
scara
34

Mecanisme ANALIZA CINEMATICA A MECANISMELOR PLANE – Lucrare de laborator 2
a vitezelor si o scara a acceleratiilor :
unde R are semnificatia marimii din realitate iar D semnificatia marimii de pe desen.
3. Scopul lucrarii. Lucrarea are ca scop sa puna la dispozitia studentilor iar acestia la rindul lor sa-si insuseasca
cunostiinte in analiza cinematica a mecanismelor plane utilizind metode grafo – analitice. Aceste metode prezinta si avantaje si dezavantaje in acest demers. In partea de final a lucrarii studentii vor face referiri justificate fata de aceste aspecte.
4. Desfasurarea lucrarii.Lucrarea are un caracter de seminar, ceea ce presupune rezolvarea efectiva a starii cinematice a
unor mecanisme cu una si doua grupe cinematice. In continuare se prezinta spre exemplificare analiza cinematica a unor mecanisme ce contin succesiv cite una din cele 5 aspecte ale diadelor.
4.1. Analiza cinematica a unui mecanism ce contine o diada RRR.Se considera mecanismul din figura 7 in care distingem diada de aspect RRR formata din cuplele
A,B,C,D si elementele 1,2,3; elementul conducator sau motor este 1, pentru care se cunoaste viteza unghiulara 1=const. iar cuplele sint localizate astfel : A 0 si 1; B 1 si 2; C 2 si 3; D 3 si 0; E 2.
a) b)Fig. 7. Mecanism ce are in structura diada RRR si planul de distributie a vitezelor
Se mai cunosc : lungimile elementelor, pozitiile cuplelor cinematice fixe A,D; pozitia punctului E in planul bielei 2 si scara de reprezentare a mecanismului.
Se cere sa se structureze un algoritm de analiza cinematica a mecanismului pentru a determina viteza si acceleratia punctului E. Pentru aceasta trebuie determinate starile cinematice a elementelor 2,3 iar apoi prin asemanare viteza si acceleratia punctului E. Algoritmul vizeaza succesiunea de cuple : B – C – D - E. In succesiune relatiile Euler sint urmatoarele :
35

Mecanisme ANALIZA CINEMATICA A MECANISMELOR PLANE – Lucrare de laborator 2
-pentru viteze: cu detalii cunoscute :
Aplicind relatiile de asemanare directa intre triunghiurile BCE in aceasta succesiune si bce in aceeasi succesiune ca BCE , figura 7 a,b, putem scrie :
; ; Din prima egalitate be. Din a doua egalitate ce.
In poligonul vitezelor se reprezinta intii viteza unui punct pozitionat in cupla B. In acest scop se duce o perpendiculara pe AB pe care se reprezinta la scara un segment corespunzator valorii vitezei rezultate din prima relatie Euler. Perpendiculara se duce prin polul vitezelor pv deoarece viteza lui A este zero. Pentru a determina viteza unui punct pozitional in cupla C prin virful vectorului viteza vB
se duce o perpendiculara la BC care se va intersecta cu o alta perpendiculara dusa prin pol la DC. Din pol pina in acest punct rezulta viteza absoluta a punctului din C. Pentru viteza punctului E se aplica asa cum s-a precizat mai sus teorema asemanarii directe intre triunghiurile precizate.
Fig. 8. Distributia acceleratiilor si sensul de parcurgere a triunghiurilor direct asemenea.
Pentru acceleratii, in aceeasi succesiune ca si in cazul vitezelor, relatiile Euler sint urmatoarele:
cu detaliile:
TA – Teorema Asemanarii conform careea din rapoartele: rezulta
In poligonul acceleratiilor din figura 8 se reprezinta intii acceleratia punctului B printr-un vector ce trece prin polul acceleratiilor pa. Ea are directia elementului 1 , fiind acceleratie normala si este indreptata spre A , centrul de rotatie ( absolut ) a elementului 1. In poligon se reprezinta un segment de lungime corespunzatoare marimii acceleratiei rezultate din prima relatie. Conform relatiei vectoriale a acceleratiei unui punct din cupla C reprezentarea sa vectoriala presupune : construirea prin
extremitatea vectorului a unei paralele n2 la elementul 2 pe care se reprezinta la scara vectorul
iar apoi prin extremitatea acestuia se construieste o dreapta ; pe de alta parte, prin polul
36

Mecanisme ANALIZA CINEMATICA A MECANISMELOR PLANE – Lucrare de laborator 2
acceleratiilor se construieste o paralele n3 la elementul 3 pe care se reprezinta la scara vectorul
iar apoi prin extremitatea acestuia se construieste o dreapta . La intersectia celor doua
perpendiculare, respectiv rezulta , din polul pina in punctul de intersectie
vectorul acceleratie a unui punct legat de cupla C, vectorul .
4.2. Analiza cinematica a unui mecanism ce contine o diada TRR (RRT).Se considera mecanismul din figura 9 in care distingem diada de aspect TRR formata din cuplele
B,C si translatia dintre elementele 2 si 1 si elementele 1,2,3; elementul conducator sau motor este 1, pentru care se cunoaste viteza unghiulara 1=const. iar cuplele sint localizate astfel : A 0 si 1; B 2 si 3; C 3 si 0 B1 1; D 2.
Fig. 9. Mecanism ce are in structura diada RRTsi planul de distributie a vitezelor
Se mai cunosc : lungimile elementelor, pozitiile cuplelor cinematice fixe A, C; pozitia punctului D in planul bielei 2 si scara de reprezentare a mecanismului.
Se cere sa se structureze un algoritm de analiza cinematica a mecanismului pentru a determina viteza si acceleratia punctului D. Pentru aceasta trebuie determinate starile cinematice ale elementelor 2,3 iar apoi prin constructie vectoriala viteza si acceleratia punctului D. Algoritmul vizeaza succesiunea
de cuple : B1 – B - C – D. B si B1 ( sau )– puncte suprapuse geometric dar distincte mecanic. In
succesiune relatiile Euler sint urmatoarele :
Pentru viteze : iar pentru acceleratii:
In final se obtin parametri cinematici pentru punctul D, respectiv :
37

Mecanisme ANALIZA CINEMATICA A MECANISMELOR PLANE – Lucrare de laborator 2
In poligonul vitezelor se reprezinta intii viteza unui punct pozitionat in cupla B1. In acest scop se duce o perpendiculara pe AB1 pe care se reprezinta la scara un segment corespunzator valorii
vitezei rezultate din prima relatie Euler. Perpendiculara se duce prin polul vitezelor deoarece viteza
lui A este zero, vectorul viteza fiind . Pentru a determina viteza unui punct
pozitionat in cupla B prin virful vectorului viteza adica prin virful a vectorului se duce o
paralela la ghidajul . Apoi prin polul se construieste o perpendiculara la BC care se va intersecta
cu paralela la ghidajul in punctul . Din pol pina in acest punct rezulta viteza absoluta a punctului din B. Pentru viteza punctului D se utilizeaza ecuatia vectoriala data mai sus in care se cunosc toate datele necesare : marime, directie, sens deoarece asa cum se indica se cunosc toate vitezele unghiulare necesare in determinarea vitezei absolute a punctului D.
Fig.10. Distributia acceleratiilor in mecanismul ce contine in structura RRT.
In poligonul acceleratiilor din figura 10 se reprezinta intii acceleratia punctului B1 printr-un vector ce trece prin polul acceleratiilor pa. Ea are directia AB1 , fiind acceleratie normala si este indreptata spre A , centrul de rotatie ( absolut ) a elementului 1 dar si a elementului 2. Aceasta deoarece
cupla de translatie de pe ghidajul conserva viteza unghiulara .
In poligon se reprezinta apoi vectorul accelaratie Coriolis pe directie perpendiculara pe
ghidajul ; sensul acestei acceleratii se obtine prin rabaterea cu 900 a vitezei in sensul vitezei
unghiulare asa cum se poate observa in figura 10. In poligonul acceleratiilor vectorul
acceleratie Coriolis este ; prin virful acestui vector se duce apoi paralela la ghidajul . Prin polul
acceleratiilor se construieste pe o paralela la elementul 3 ; modulul acestui vector este cunoscut
deoarece se cunoaste viteza unghiulara din viteza corespunzatoare; prin se construieste apoi
o perpendiculara pe elementul 3; aceasta perpendiculara se intersecteaza cu paralela la in punctul
38

Mecanisme ANALIZA CINEMATICA A MECANISMELOR PLANE – Lucrare de laborator 2
; vectorul este , la scara de reprezentare a acceleratiilor, acceleratia unui punct pozitionat in cupla
B. Pentru a determina acceleratia punctului D se construieste conturul vectorial corespunzator
ecuatiei Euler scrisa pentru acest parametru cinematic. Se pot construi atit componenta normala cit si cea tangentiala a acceleratiei punctului D considerind ca acesta executa o miscare de rotatie in jurul cuplei B. Directiile ca si modulele acestor componente sint cunoscute. Acceleratia punctului D este
vectorul la scara acceleratiilor.
4.3. Analiza cinematica a unui mecanism ce contine o diada RTR. Se considera mecanismul din figura 7 in care distingem diada de aspect RTR formata din cuplele
A,B,C si elementele 1,2,3; elementul conducator sau motor este 1, pentru care se cunoaste viteza unghiulara 1=const. iar cuplele sint localizate astfel : A 0 si 1; B 1 si 2; C 3 si 0; C2 2; D 2. Se mai cunosc : lungimile elementelor, pozitiile cuplelor cinematice fixe A, C si a cuplei mobile B; pozitia punctului D in planul bielei 2 si scara de reprezentare a mecanismului.
Fig.11. Mecanism ce are in structura diada RTR si planul de distributie a vitezelor
Se cere sa se structureze un algoritm de analiza cinematica a mecanismului pentru a determina viteza si acceleratia punctului D. Pentru aceasta trebuie determinate starile cinematice ale elementelor 2,3 iar apoi prin asemanare viteza si acceleratia punctului D. Algoritmul vizeaza succesiunea de cuple : B – C2 – D. C si C2 – puncte suprapuse geometric dar distincte mecanic. In succesiune relatiile Euler sint urmatoarele :
Pentru viteze ; ;
unde TA – Teorema Asemanarii;In poligonul vitezelor se reprezinta intii viteza unui punct pozitionat in cupla B. In acest
scop se duce o perpendiculara pe AB pe care se reprezinta la scara un segment corespunzator valorii
vitezei rezultate din prima relatie Euler. Perpendiculara se duce prin polul vitezelor deoarece viteza
lui A este zero, vectorul viteza pentru B fiind . Pentru a determina viteza unui punct C2 pozitionat
in cupla C prin virful vectorului viteza adica prin virful a vectorului se duce o perpendiculara
la BC2 . Apoi prin polul se construieste o paralela la ghidajul care se va intersecta cu
perpendiculara la BC2 in punctul . Din pol pina in acest punct rezulta viteza absoluta a punctului din
C2. Din prima egalitate de rapoarte de asemanare bd iar din a doua egalitate de rapoarte de
39

Mecanisme ANALIZA CINEMATICA A MECANISMELOR PLANE – Lucrare de laborator 2
asemanare c2d. Pentru stabilirea corecta a pozitiei punctului d se construiesc unghiurile α si de βacea parte a segmentului cunoscut de acum c2b incit sensul de citire a triunghiului sa fie acelasi
cu snsul de citire a triunghiului . Vectorul viteza a punctului d este ; in valoare reala
aceasta viteza este ms-1 . Pentru acceleratii relatiile sint :
;
Fig. 12. Distributia acceleratiilor.
; :
In poligonul acceleratiilor din figura 12 se reprezinta intii acceleratia punctului B printr-un vector ce trece prin polul acceleratiilor pa. Ea are directia AB , fiind acceleratie normala si este
indreptata spre A , centrul de rotatie ( absolut ) a elementului 1. In poligon acest vector este . Se
reprezinta apoi vectorul accelaratie normala pe directie paralela cu C2B prin vectorul . Prin n2
se duce apoi o perpendiculara pe C2B. Cum acceleratia unui punct pozitionat in cupla C este zero,
acceleratia Coriolis se reprezinta prin vectorul ; sensul acestei acceleratii se obtine prin
rabaterea cu 900 a vitezei in sensul vitezei unghiulare asa cum se poate observa in figura 12.
Prin virful acestui vector se duce apoi paralela la ghidajul . La intersectia acestei paralele cu
perpendiculara la C2B se obtine punctul iar din polul acceleratiilor pa pina in rezulta acceleratia
punctului C2 pozitionat in cupla C adica . Pentru stabilirea corecta a pozitiei punctului d’ se
construiesc unghiurile α si de acea parte a segmentului cunoscut de acum β incit sensul de citire a
triunghiului sa fie acelasi cu snsul de citire a triunghiului . Vectorul acceleratie a
punctului d este ; in valoare reala aceasta viteza este ms-2 .
4.4. Analiza cinematica a unui mecanism ce contine o diada TRT.Se considera mecanismul din figura 13 in care distingem diada de aspect TRT formata din
cuplele A,B, cuplele de translatie ce au ghidaje fixe si elementele 1,2,3; elementul conducator sau motor este 1, pentru care se cunoaste viteza unghiulara 1=const. iar cuplele sint localizate astfel : A 0 si 1;B 2 si 3; C 2; Bzz 1; B si Bzz sunt puncte suprapuse geometric dar distincte mecanic.
Se mai cunosc : lungimile elementelor, pozitiile cuplelor cinematice fixa A si mobila B, pozitia punctului C in planul culisei 2; pozitiile ghidajelor si scara de reprezentare a mecanismului.
40

Mecanisme ANALIZA CINEMATICA A MECANISMELOR PLANE – Lucrare de laborator 2
Se cere sa se structureze un algoritm de analiza cinematica a mecanismului pentru a determina viteza si acceleratia punctului C. Pentru aceasta trebuie determinate starile cinematice ale elementelor 2,3 iar apoi viteza si acceleratia punctului C. Algoritmul vizeaza succesiunea de cuple : Bzz; – B – C. In succesiune, relatiile Euler sint urmatoarele :
-pentru viteze : ;
Fig. 13. Mecanism ce contine grupa TRT si distributia vitezelor
- pentru acceleratii :
;
Fig. 14. Distributia acceleratiilor
In poligonul vitezelor se reprezinta intii viteza unui punct pozitionat in cupla Bz. In acest
41

Mecanisme ANALIZA CINEMATICA A MECANISMELOR PLANE – Lucrare de laborator 2
scop se duce o perpendiculara pe ABz pe care se reprezinta la scara un segment corespunzator valorii
vitezei rezultate din prima relatie Euler. Perpendiculara se duce prin polul vitezelor deoarece viteza
lui A este zero, vectorul viteza fiind . Pentru a determina viteza unui punct
pozitionat in cupla B prin virful vectorului viteza adica prin virful a vectorului se duce o
paralela la ghidajul . Apoi prin polul se construieste o perpendiculara la BC care se va intersecta
cu paralela la ghidajul in punctul . Din pol pina in acest punct rezulta viteza absoluta a punctului din B. Pentru viteza punctului C se utilizeaza ecuatia vectoriala data mai sus in care se cunosc toate datele necesare : marime, directie, sens deoarece asa cum se indica se cunosc toate vitezele unghiulare necesare in determinarea vitezei absolute a punctului C.
In poligonul acceleratiilor din figura 14 se reprezinta intii acceleratia punctului Bz printr-un vector ce trece prin polul acceleratiilor pa. Ea are directia ABz , fiind acceleratie normala si este indreptata spre A , centrul de rotatie ( absolut ) a elementului 1 dar si a elementului 2. Aceasta deoarece
cupla de translatie de pe ghidajul conserva viteza unghiulara ; acceleratia punctului Bz este
vectorul . In poligon , in se reprezinta apoi vectorul accelaratie Coriolis pe directie
perpendiculara pe ghidajul ; sensul acestei acceleratii se obtine prin rabaterea cu 900 a vitezei in
sensul vitezei unghiulare asa cum se poate observa in figura 14. In poligonul acceleratiilor
vectorul acceleratie Coriolis este ; prin virful k a acestui vector se duce apoi paralela la ghidajul .
Prin polul acceleratiilor se construieste paralela la ghidajul . Cele doua paralele se intersecteaza in
punctul . Acceleratia unui punct ce apartine cuplei B va fi , la scara, vectorul .
Pentru a determina acceleratia punctului C se construieste conturul vectorial corespunzator ecuatiei Euler scrisa pentru acest parametru cinematic, respectiv :
Se pot construi atit componenta normala cit si cea tangentiala a acceleratiei punctului C fata de B considerind ca acesta executa o miscare de rotatie in jurul cuplei B. Directiile ca si modulele acestor
componente sint cunoscute. Acceleratia punctului C este vectorul la scara acceleratiilor.
4.5. Analiza cinematica a unui mecanism ce contine o diada RTT(TTR).Se considera mecanismul din figura 15 in care distingem diada de aspect RTT formata din
cuplele de rotatie A,B, cupla de translatie intre elementele 2 si 3 , cuplele de translatie a elementului 3 si elementele 1,2,3; elementul conducator sau motor este 1, pentru care se cunoaste viteza unghiulara 1=const. iar cuplele sint localizate astfel : A 0 si 1; B 1 si 2; B3 ≡ By 3; B ≡ Bx xx; C 2. Punctele B , By ,B3 si Bx sunt puncte suprapuse geometric dar distincte mecanic.
42

Mecanisme ANALIZA CINEMATICA A MECANISMELOR PLANE – Lucrare de laborator 2
Fig.15. MecanismuL ce are instructura grupa RTT sau TTR si distributia vitezelor.
Se mai cunosc : lungimile elementelor, pozitiile cuplelor cinematice fixa A si mobila B, pozitia punctului C in planul culisei 2; pozitiile ghidajelor si scara de reprezentare a mecanismului.
Se cere sa se structureze un algoritm de analiza cinematica a mecanismului pentru a determina viteza si acceleratia punctului C. Pentru aceasta trebuie determinate starile cinematice ale elementelor 2,3 iar apoi viteza si acceleratia punctului C. Algoritmul vizeaza succesiunea de cuple : B - By –C.
In succesiune, relatiile Euler pentru viteze sint urmatoarele :
-pentru viteze : ;
;
In poligonul vitezelor se reprezinta intii viteza unui punct pozitionat in cupla B. In acest scop se
duce o perpendiculara la AB prin polul pe care se reprezinta la scara un segment corespunzator
valorii vitezei rezultate din prima relatie Euler. Perpendiculara se duce prin polul vitezelor deoarece
viteza lui A este zero, vectorul viteza a punctului b fiind . Pentru a determina viteza unui punct
pozitionat in cupla B dar apartinind elementului 3, prin virful vectorului viteza adica prin virful a
vectorului se duce o paralela la ghidajul . Apoi prin polul se construieste o paralela la ghidajul
.Cele doua paralele se intersecateaza in punctul . Din pol pina in acest punct s-a obtinut, la
scara de reprezentare a vitezelor, vectorul viteza a puntului B - By, respectiv vectorul
.Conform relatiei Euler pentru viteze, relatie scrisa mai sus in caseta rezulta ca viteza punctului C este identica cu viteza unui punct legat de cupla B ce apartine elementului 2.
In succesiune, relatiile Euler pentru acceleratii sint urmatoarele :
;
43

Mecanisme ANALIZA CINEMATICA A MECANISMELOR PLANE – Lucrare de laborator 2
Fig.16. Distributia acceleratiilor pentru mecanismul ce contine grupa RTT
In poligonul acceleratiilor din figura 16 se reprezinta intii acceleratia punctului B printr-un
vector ce trece prin polul acceleratiilor dar deoarece acceleratia unui punct pozitionat pe
cupla fixa A este zero. Ea are directia AB , fiind acceleratie normala si este indreptata spre A , centrul de
rotatie ( absolut ) a elementului 1; acceleratia punctului legat de cupla B este vectorul ; acceleratia
punctului B3 suprapus cu cupla B este vectorul . In poligon se obtine astfel : conform primei
relatii Euler din caseta prin virful a vectorului ar urma sa se construiasca vectorul accelaratie
Coriolis pe directie perpendiculara pe ghidajul ; dar pentru ca viteza unghiulara
acceleratia astfel ca prin virful a vectorului se construieste o paralela la ghidajul ;
apoi se constata usor ca acceleratia absoluta a punctului B3 este paralela cu ghidajele fixe paralela ce
se construieste prin polul . La intersectia celor doua paralele se obtine, la scara de reprezentare a
acceleratiilor vectorul acceleratie . Acceleratia punctului C este identica cu accelaratia unui punct
legat de cupla B ce apartine elementului 2.
Probleme propuse pentru rezolvare.P1. Se considera mecanismul din figura alaturata reprezentat la o scara cunoscuta kl.
Cunoscindu-se parametri pozitionali ai cuplelor cinematice atit ai celor de translatie cit si ai celor de rotatie, lungimile elementelor si viteza unghiulara se cer :
- nominalizarea corecta a cuplelor cinematice ,- gradul de mobilitate al mecanismului si descompunerea in grupe,- starea cinematica (viteze si acceleratii) a elementelor din structura mecanismului.
P2. Se considera mecanismul din figura alaturata reprezentat la o scara cunoscuta kl.Cunoscindu-se parametri pozitionali ai cuplelor cinematice atit ai celor de translatie cit si ai celor de rotatie si lungimile elementelor si viteza unghiulara se cer :
- gradul de mobilitate al mecanismului,- descompunerea in grupe cinematice si caracterizarea acestor grupe;- starea cinematica (viteze si acceleratii) a elementelor din structura mecanismului.
44

Mecanisme ANALIZA CINEMATICA A MECANISMELOR PLANE – Lucrare de laborator 2
P3. Se considera mecanismul din figura alaturata reprezentat la o scara cunoscuta kl.Cunoscindu-se parametri pozitionali ai cuplelor cinematice atit ai celor de translatie cit si ai celor de rotatie si lungimile elementelor. Se cer :
- exprimati-va, cu justificare, optiunea pentru elementul motor optim din structura mecanismului,
- considerati ca pentru acel element motor se da , ,- nominalizarea corecta a cuplelor cinematice si notarea elementelor din mecanism ,- gradul de mobilitate al mecanismului,- descompunerea in grupe cinematice si caracterizarea acestor grupe;- starea cinematica (viteze si acceleratii) a elementelor din structura mecanismului.
P4. Se considera mecanismul din figura alaturata reprezentat la o scara cunoscuta kl.Cunoscindu-se parametri pozitionali ai cuplelor cinematice atit ai celor de translatie cit si ai celor de rotatie si lungimile elementelor. Se cer :
- exprimati-va, cu justificare, optiunea pentru elementul motor optim din structura mecanismului,
- considerati ca pentru acel element motor se da , ,- nominalizarea corecta a cuplelor cinematice si notarea elementelor din mecanism ,- gradul de mobilitate al mecanismului,- descompunerea in grupe cinematice si caracterizarea acestor grupe;- starea cinematica (viteze si acceleratii) a elementelor din structura mecanismului.
45

Mecanisme ANALIZA CINEMATICA A MECANISMELOR PLANE – Lucrare de laborator 2
P5. Se considera mecanismul din figura alaturata reprezentat la o scara cunoscuta kl.Cunoscindu-se parametri pozitionali ai cuplelor cinematice atit ai celor de translatie cit si ai celor de rotatie si lungimile elementelor. Se cer :
- exprimati-va, cu justificare, optiunea pentru elementul motor optim din structura mecanismului,
- considerati ca pentru acel element motor se da , ,- nominalizarea corecta a cuplelor cinematice si notarea elementelor din mecanism ,- gradul de mobilitate al mecanismului,- descompunerea in grupe cinematice si caracterizarea acestor grupe;- starea cinematica (viteze si acceleratii) a elementelor din structura mecanismului.
P6. Se considera mecanismul din figura alaturata reprezentat la o scara cunoscuta kl.Cunoscindu-se parametri pozitionali ai cuplelor cinematice atit ai celor de translatie cit si ai celor de rotatie si lungimile elementelor. Se cer :
- exprimati-va, cu justificare, optiunea pentru elementul motor optim din structura mecanismului,
- considerati ca pentru acel element motor se da , ,- nominalizarea corecta a cuplelor cinematice si notarea elementelor din mecanism ,
46

Mecanisme ANALIZA CINEMATICA A MECANISMELOR PLANE – Lucrare de laborator 2
- gradul de mobilitate al mecanismului,- descompunerea in grupe cinematice si caracterizarea acestor grupe;- starea cinematica (viteze si acceleratii) a elementelor din structura mecanismului.
47