





Limbile
Pagini
Legal

—-- _
r Cr"ta;—
—
A•si
Ay
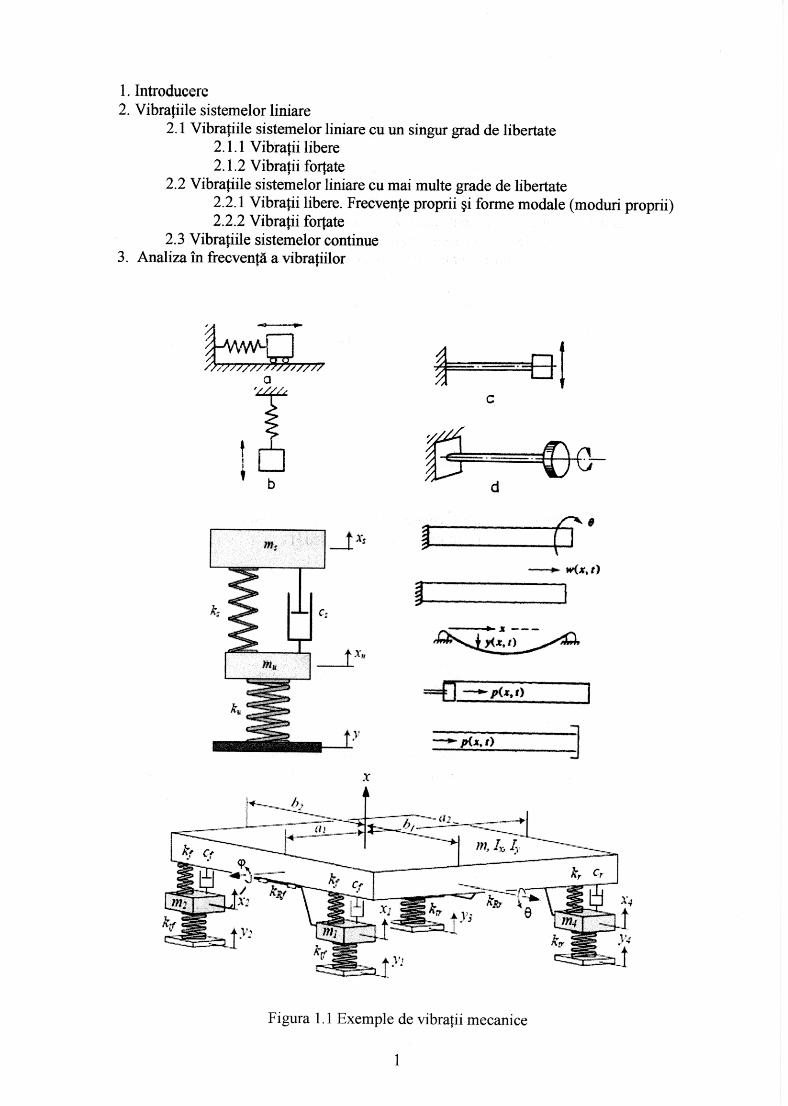
IntroduccreVibratiile sistemelor liniare
2.1 Vibratiile sistemelor liniare cu un singur grad de libertate2.1.1 Vibratii libere2.1.2 Vibratii fortate
2.2 Vibratiile sistemelor liniare cu mai multe grade de libertate2.2.1 Vibratii libere. Frecvente proprii forme modale (moduri proprii)2.2.2 Vibratii fortate
2.3 Vibratiile sistemelor continue3. Analiza in frecventa a vibratiilor
° w(x, t)
,g4\4:_y(x, r)
ptx,
h:(r 1-Y2
hkr C?
C
-.1g7±...1111111 y, h, /lbA yi
Figura 1.1 Exemple de vibratii mecanice
1
a--
—ro
T
V t
.111nn•n
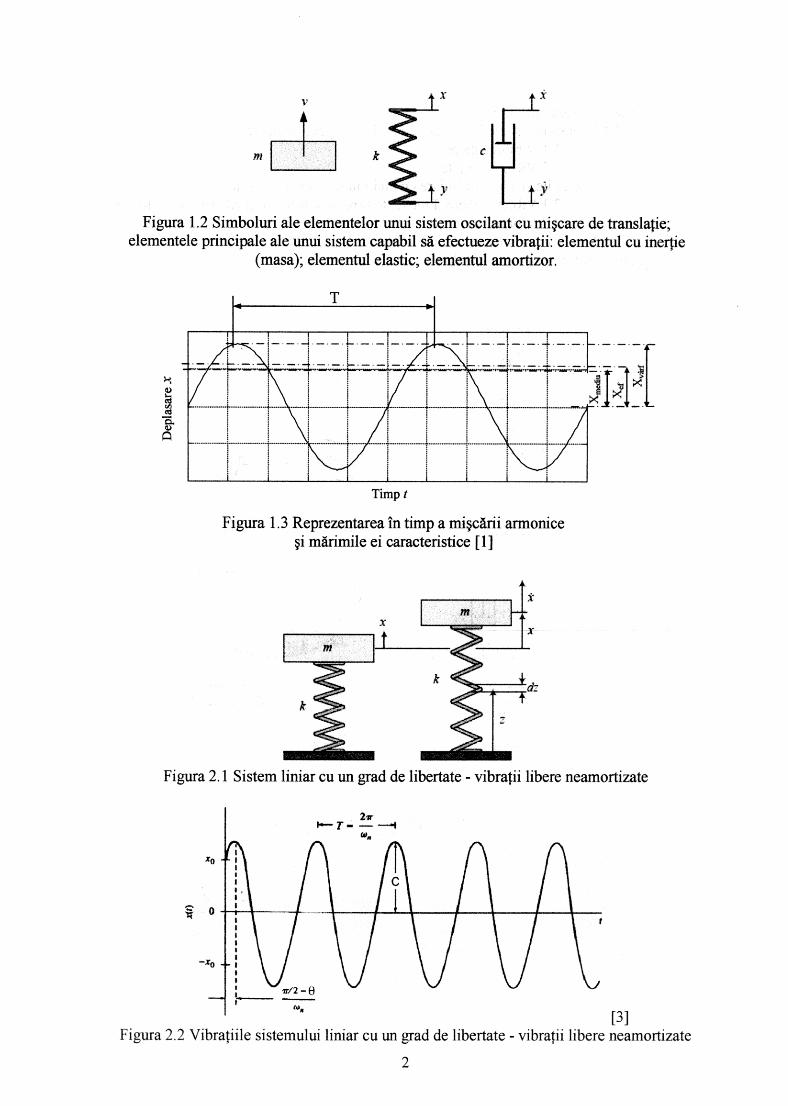
t Figura 1.2 Simboluri ale elementelor unui sistem oscilant cu miscare de translatie;
elementele principale ale unui sistem capabil sa efectueze vibratii: elementul cu inertie(masa); elementul elastic; elementul amortizor.
e)
CdCdcd
R.n 11.)
Timp t
Figura 1.3 Reprezentarea in timp a miscarii armonicesi mdrimile ei caracteristice [1]
x
Figura 2.1 Sistem liniar cu un grad de libertate - vibratii libere neamortizate
2/rT =
[31Figura 2.2 Vibratiile sistemului liniar cu un grad de libertate - vibratii libere neamortizate
2
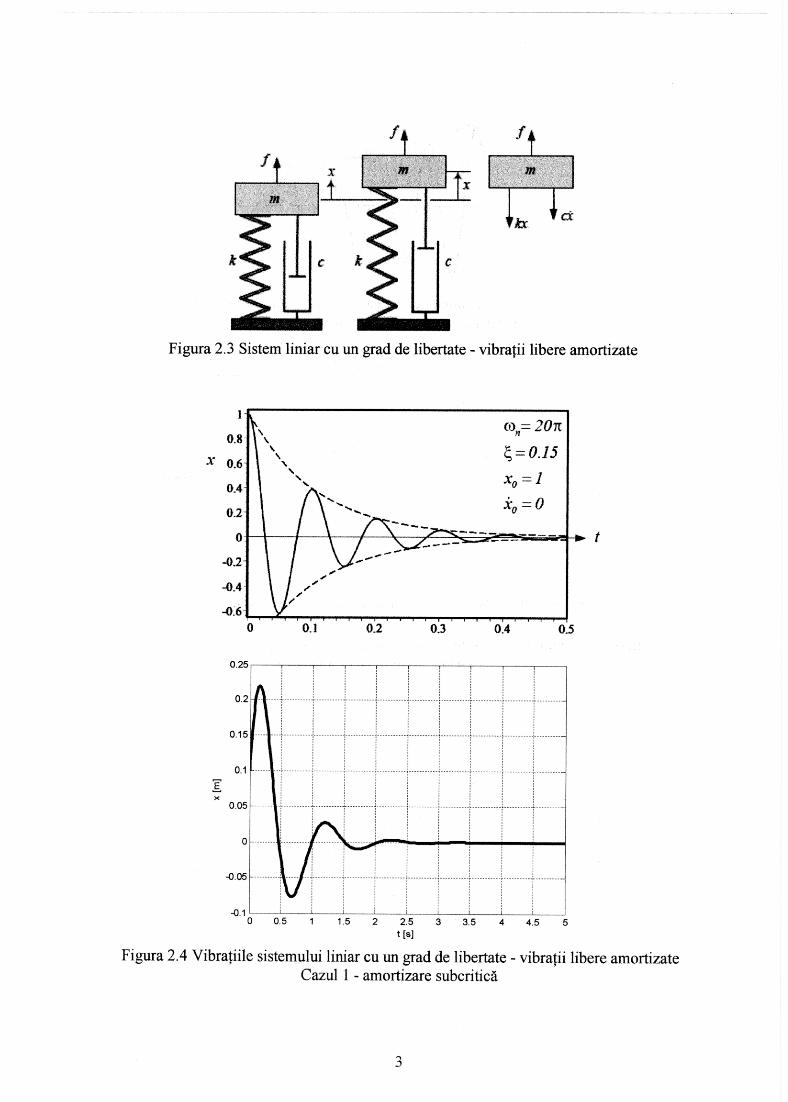
Figura 2.3 Sistem liniar cu un grad de libertate - vibratii libere amortizate
X
0 0 5 1.5
2.5
3.5
4
4.5
5t [s]
Figura 2.4 Vibratiile sistemului liniar cu un grad de libertate - vibratii libere amortizateCazul 1 - amortizare subcriticd
3
—----------0.5 1.0 1.5 --- --- 2.0----
- ------------ t (s)
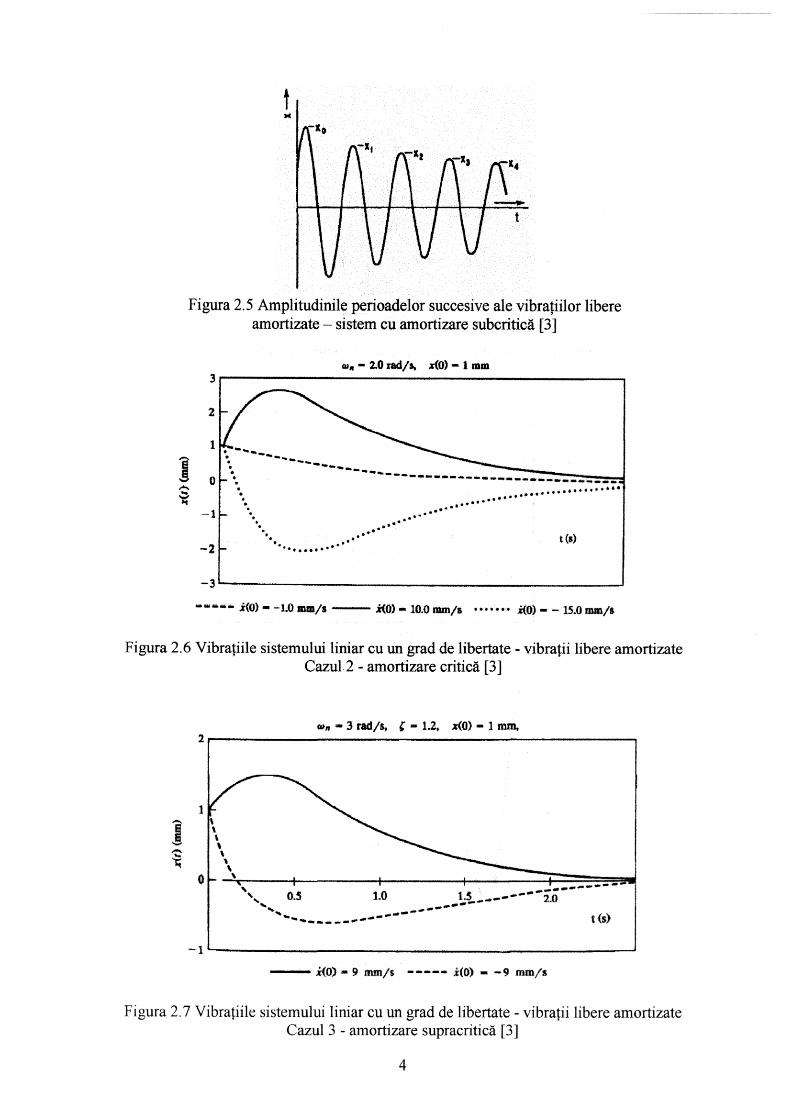
Figura 2.5 Amplitudinile perioadelor succesive ale vibratiilor libereamortizate — sistem cu amortizare subcriticd [3]
aim — 2.0 rad/s, s(0) — 1 mm3
2
1
—2
3
1(0) —3.0 mm/s *(0) 10.0 mm/s 1(0) — 15.0 mm/s
Figura 2.6 Vibratiile sistemului liniar cu un grad de libertate - vibratii libere amortizateCazul.2 - amortizare critic. [3]
— 3 radis, — 1.2, x(0) — 1 mm,
i(0) 9 mm/s i(0) —9 mm/s
Figura 2.7 Vibratiile sistemului liniar cu un grad de libertate - vibratii libere amortizateCazul 3 - amortizare supracriticd [3]
4
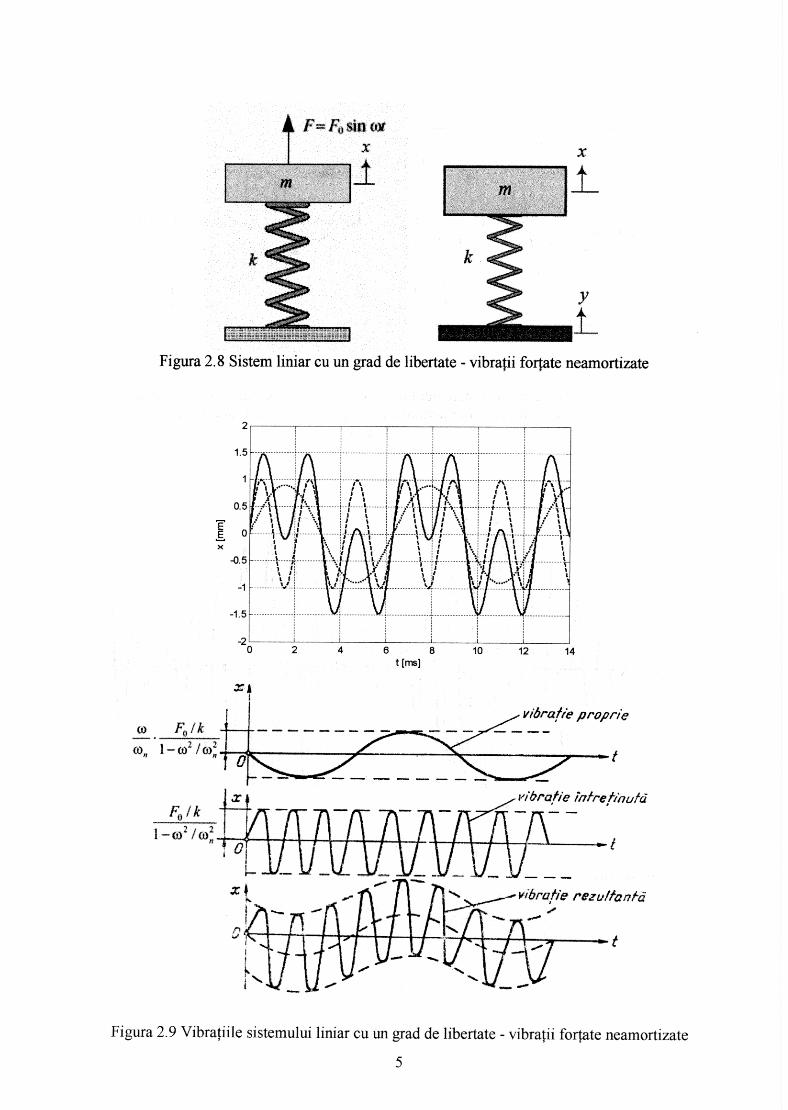
vrarcz,/te proprie0) F4,1 k
u.)„ 1- / ey,-;
r -t vi&rafie ifilrefinufd
Fo/k
1 --(0 2 10)2
--vibratie reztfilaril-a
X
Figura 2.8 Sistem liniar cu un grad de libertate - vibratii fortate neamortizate
2
1.5
0.5
-0.5
-1
-1.5
-20 2 4 6 8
10 12
14t [ms]
Figura 2.9 Vibratiile sistemului liniar cu un grad de libertate - vibratii fortate neamortizate
5
X
o
= (On
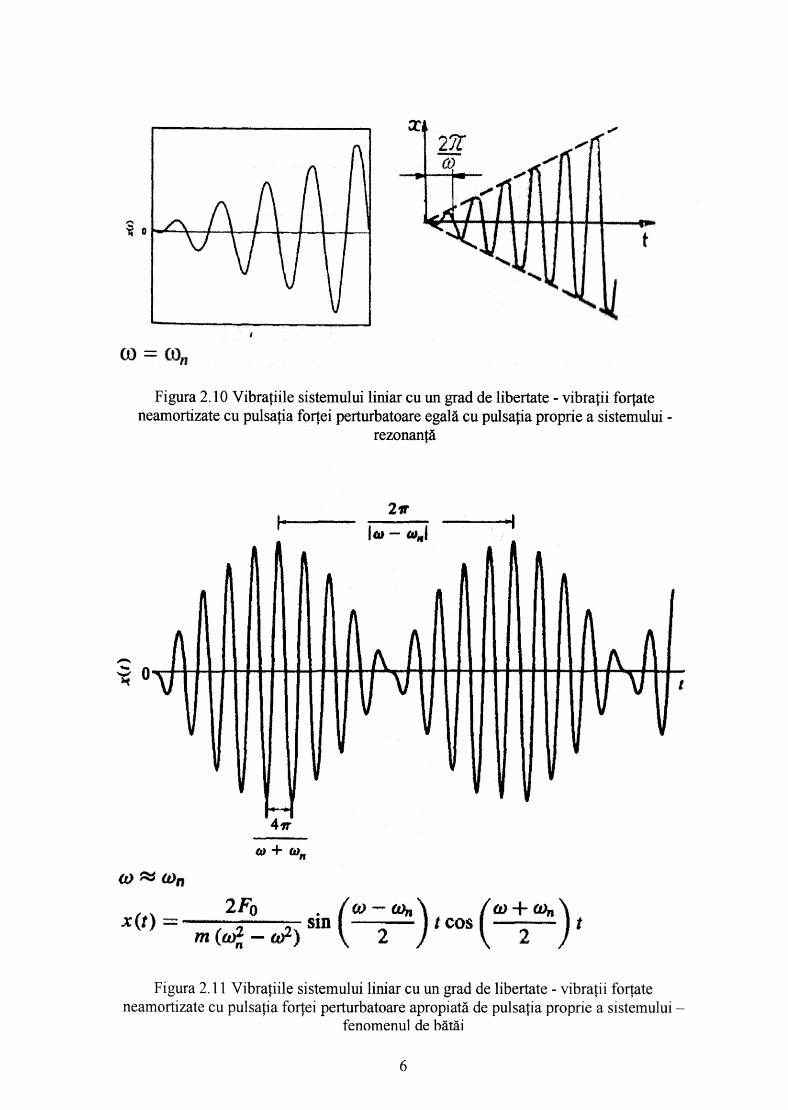
Figura 2.10 Vibratiile sistemului liniar cu un grad de libertate - vibratii fortateneamortizate cu pulsatia fortei perturbatoare egald cu pulsatia proprie a sistemului -
rezonanta
2 ir
+
(On
x(t) 2F0co.n cOs
-- con ) (to + ton sim (to! — 012 ) 2 2
Figura 2.11 Vibratiile sistemului liniar cu un grad de libertate vibratii fortateneamortizate cu pulsatia fortei perturbatoare apropiatà de pulsatia proprie a sistemului —
fenomenul de hätAi
6

A= X °X,
Figura 2.12 Rdspunsul in frecventä al sistemului liniar cu un grad de libertate -factorul de amplificare in cazul vibratiilor fortate neamortizate
7
E
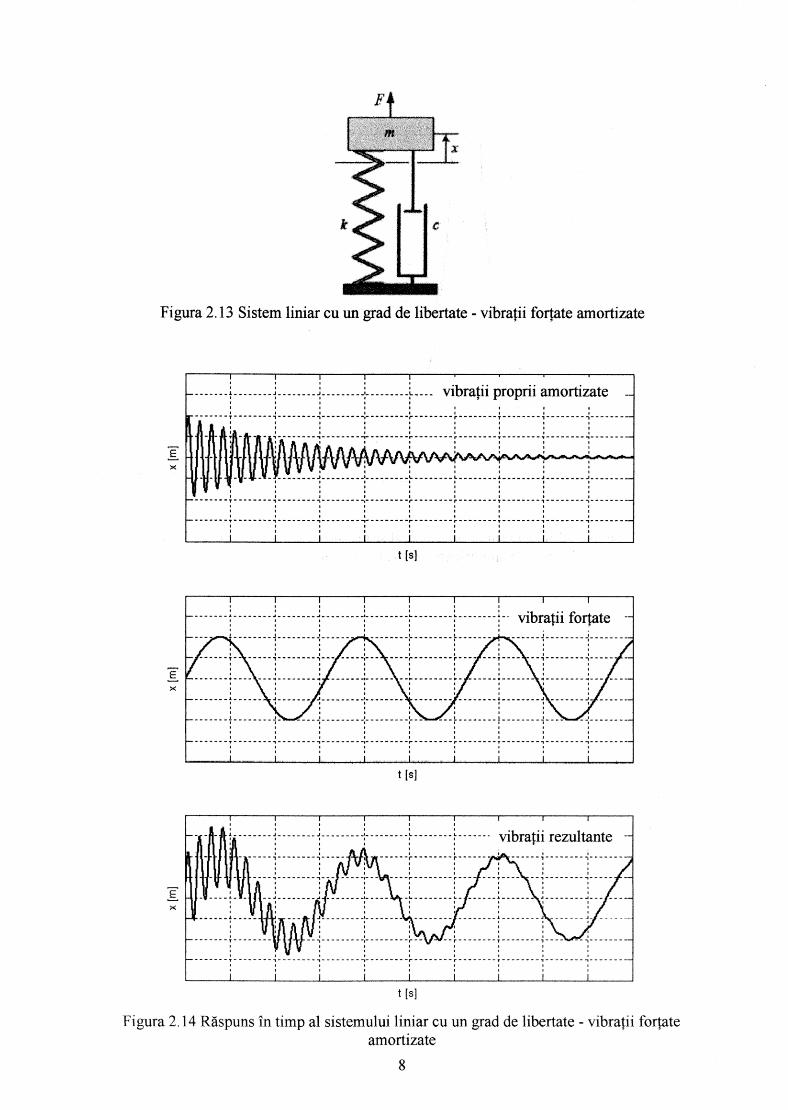
vibratii proprii amortizate
vibratii rezultante
Figura 2.13 Sistem liniar cu un grad de libertate - vibratii fortate amortizate
t [s]
Figura 2.14 Waspuns in timp al sistemului liniar cu un grad de libertate - vibratii fortateamortizate
8
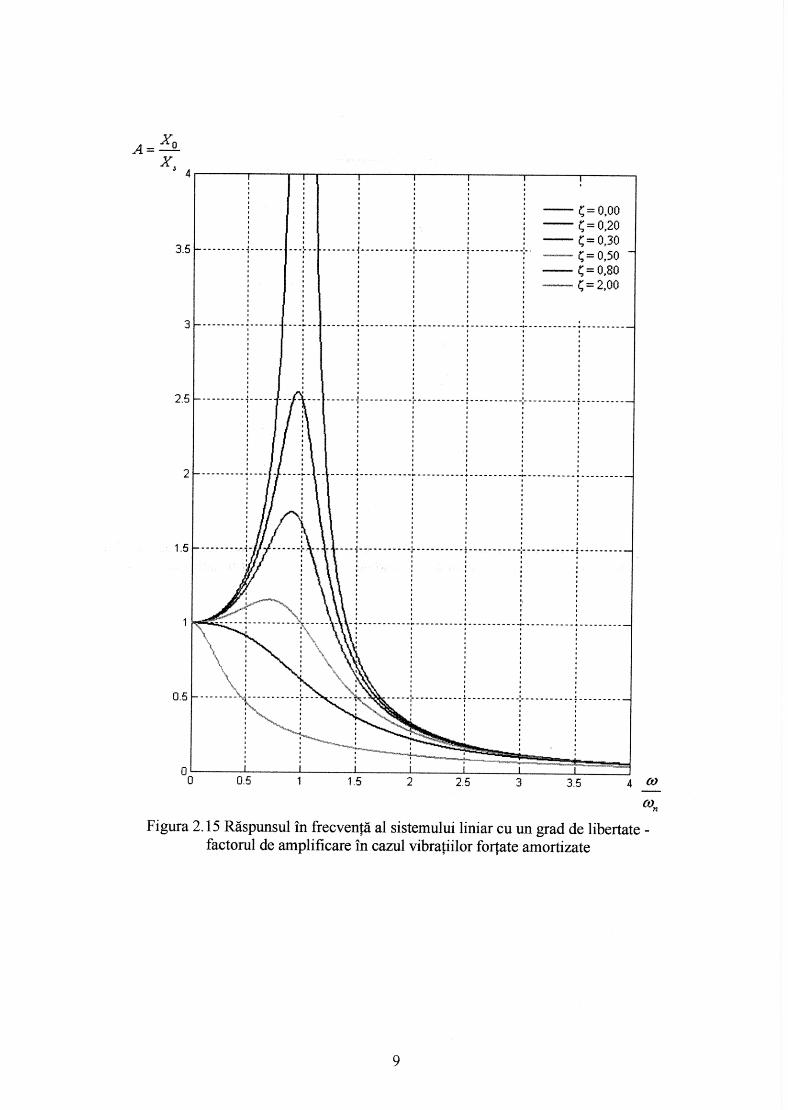
XA= °
4
3 5
- 0,00
- 0,20
-0,30
=0,50 -
- 0,80
- 2,00
2.5
1.5
0.5 1.5 2 2.5 3 3.5 4 ()
on
Figura 2.15 Rdspunsul in frecventd al sistemului liniar cu un grad de libertate -factorul de amplificare in cazul vibratiilor foiate amortizate
9
- 0,00- C= 0 20
0.304 = 0,50
- C= 0,802,00
....------= -
/
= 0.00- C= 0,20-= 0 30• . _-= 0,50-- C=0,80-5= 2.00- 5
05
1.5
2.5
35
CO
wy
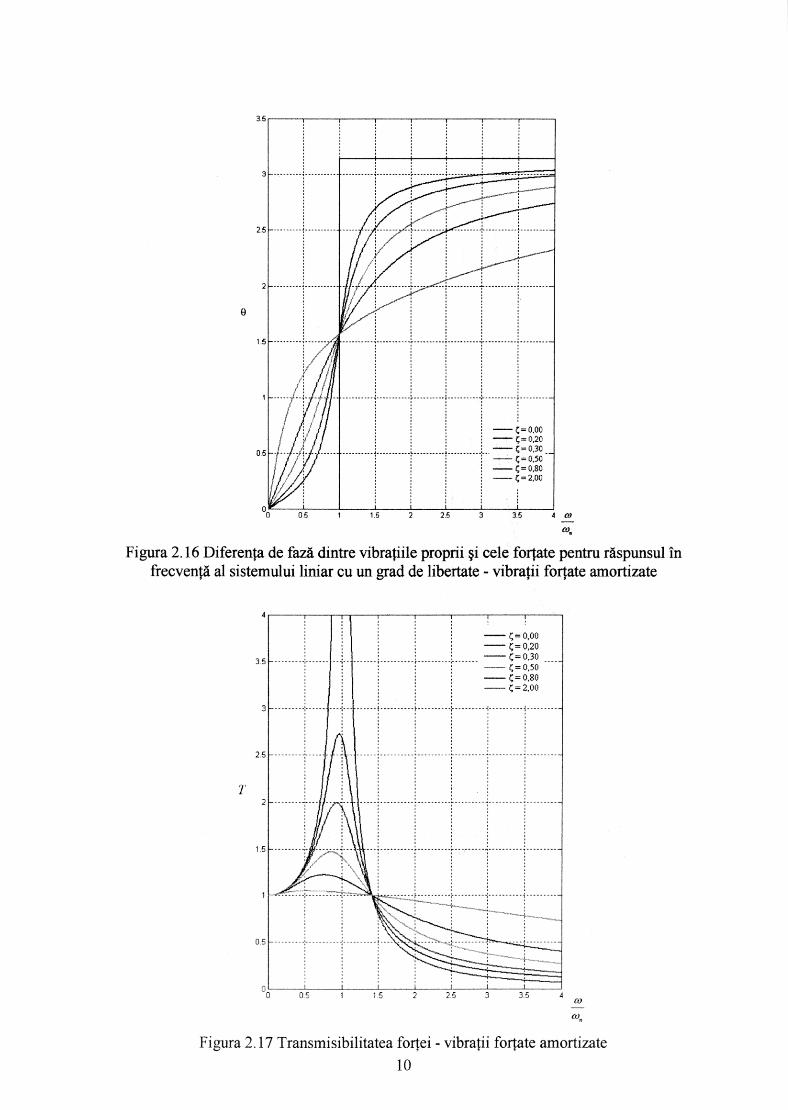
Figura 2.16 Diferenta de fazd dintre vibratiile proprii cele fortate pentru raspunsul infrecventd al sistemului liniar cu un grad de libertate - vibratii fortate amortizate
05
15
25
3.5CO
CO.
Figura 2.17 Transmisibilitatea fortei - vibratii fortate amortizate
10
3.5
3
2.5
2
1.5
as
0
3.5
2.5
2'
15
0
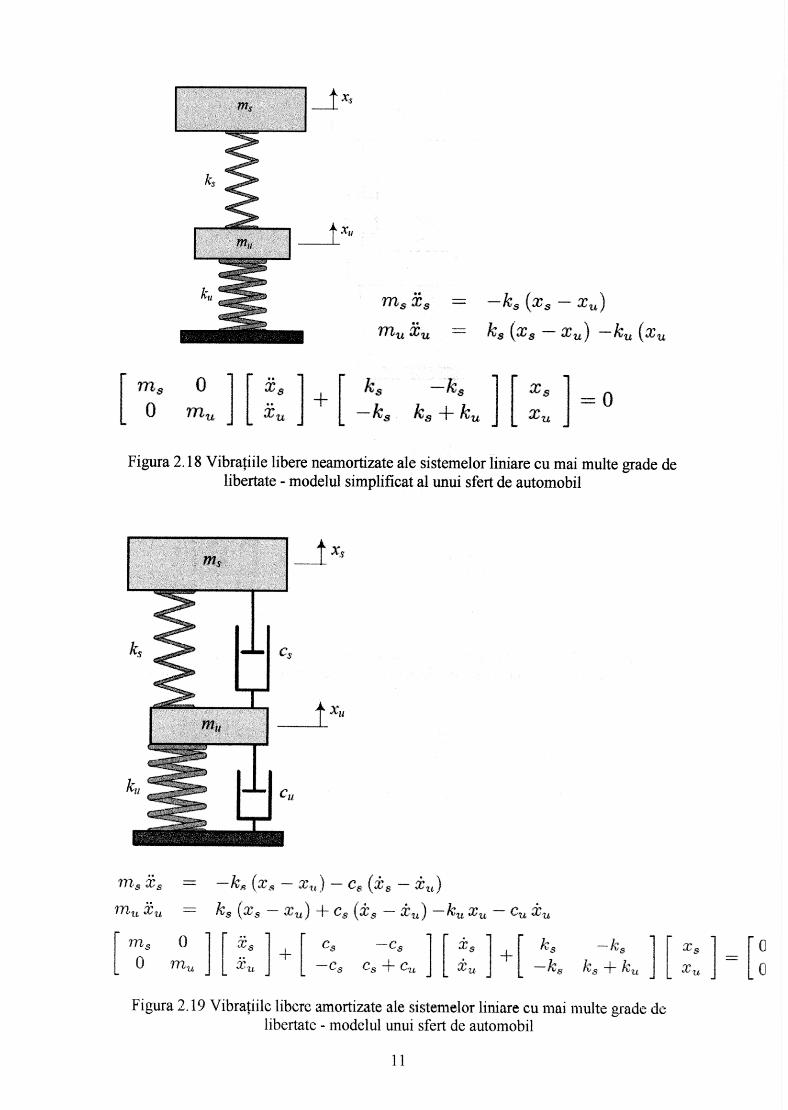
in 8 = —k5 (x — xu)
mu xu = k, (xs — xu ) —k-u (xu
771 s 0 -
0 in„X$
X tt
ks —ks—ksks + ku
Xs
XU= 0
Figura 2.18 Vibratiile libere neamortizate ale sistemelor liniare cu mai multe grade delibertate - modelul simplificat al unui sfert de automobil
= —k,(x,— x„) —
= ks — xu ) Cs — ±„) — ku xu — Cu
ins 0 .. -xs Cs —Cs xs k, —ks x s
0 u —Cs CS ± Cu „i+ —k, k5 -F k„ xu.
Figura 2.19 Vibratiile libcrc amortizate ale sistemelor liniare cu mai multe grade delibertatc - modelul unui sfert de automobil
11
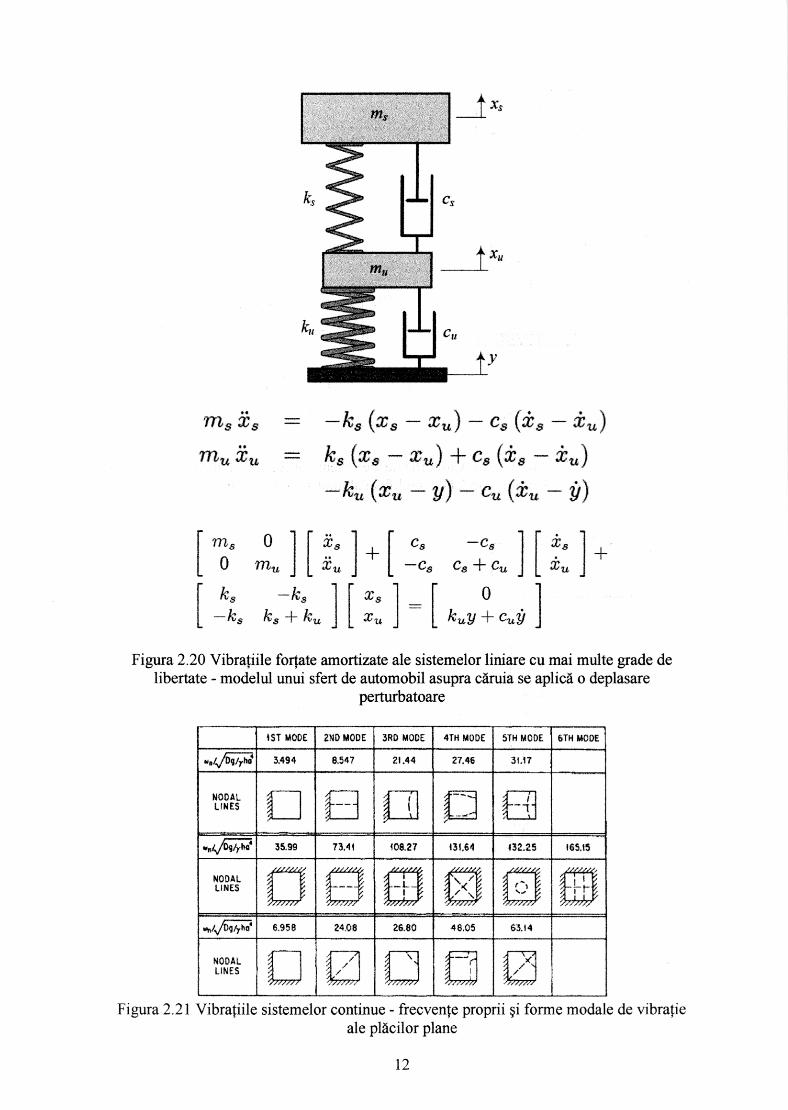
••m s x,
•
7/1u 1u
= —k(x, — xu) — c.s(ths 1,t)
A.7 .5 ( X 8 X tt ) CS ( th •ti )
—k„(x.„ — y) - -
7T1 tt
0s
tt
[
Cs—c,
—c,c, xu
F ks
—k3
[ ks +k
x, 0xt, Icuy + co)
Figura 2.20 Vibratiile fortate amortizate ale sistemelor liniare cu mai multe grade delibertate - modelul unui sfert de automobil asupra cdruia se aplicd o deplasare
perturbatoare
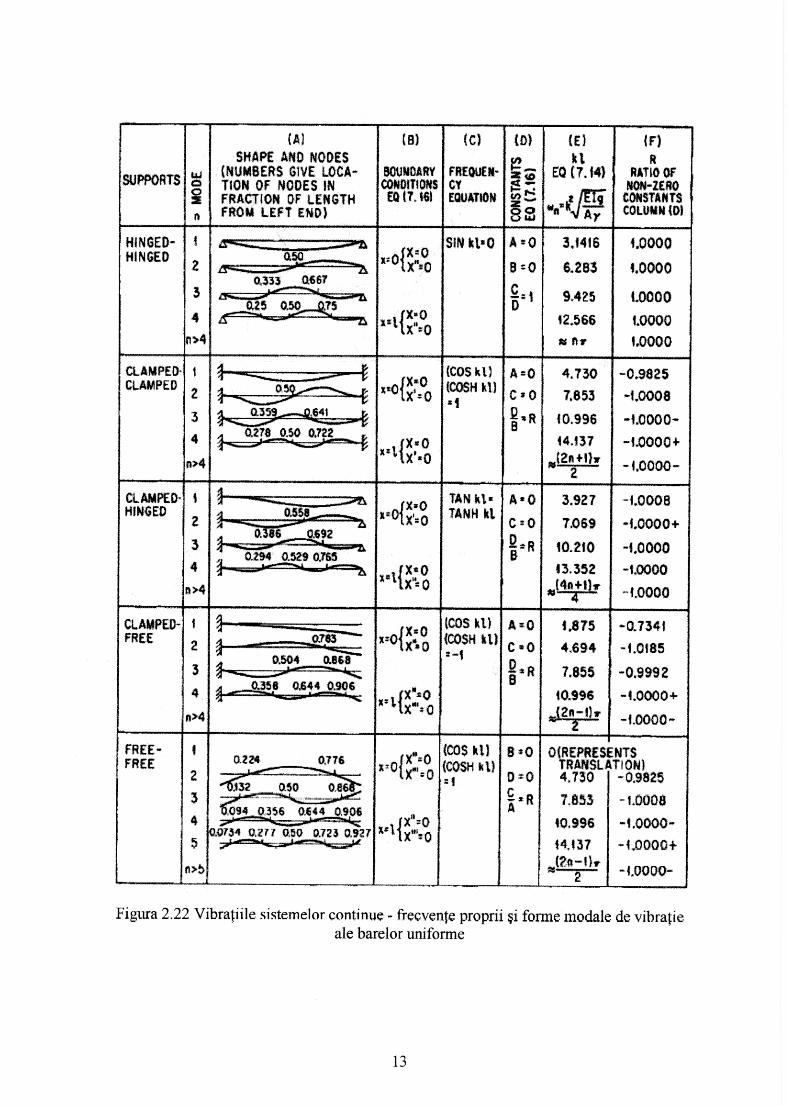
1ST MODE 2ND MODE 3RD MODE 4TH MODE 5TH MODE 6TH MODE
../3Dg/rho 3.494 8.547 21.44 27.46 31.17
NODALLINES
al
wid/D9/yha4 35.99 73.41 108.27 131.64 132.25 165.15
NODALLINES II
,...(y/ ./.....,
1111MI %..5./././////> (7, 1 I
r ?-
w„,/,,,AVylle 6.958 24.08 26.80 48.05 63.14
NODALLINES
/ \ 1
II
Figura 2.21 Vibratiile sistemelor continue - frecvente proprii forme modale de vibratieale placilor plane
ms0
12
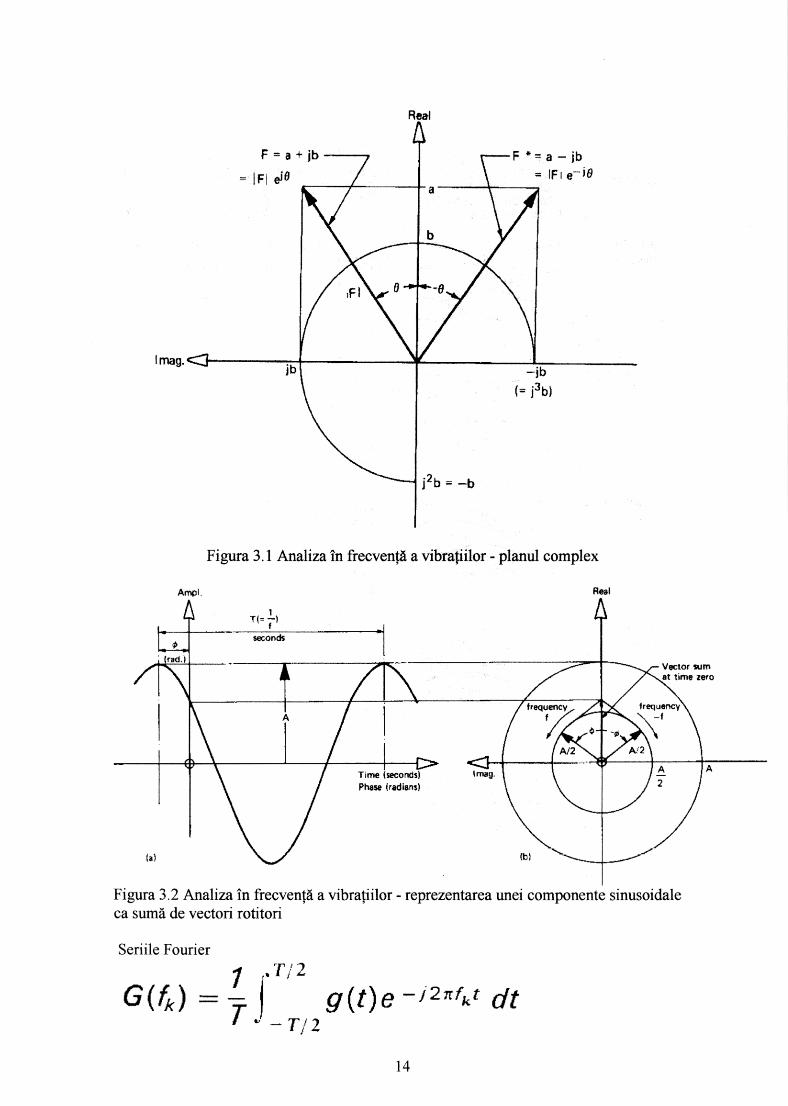
SUPPORTS on-'
(111
SHAPE AND NODES(NUMBERS GIVE LOCA-TION OF NODES INFRACTION OF LENGTHFROM LEFT END)
(8)
BOUNDARYCONDITIONS
EQ (7.161
(C)
FREQUEN-CYEQUATION
(0)Lnle G< --- ....,a :-.;
o0c..) tu
(E)kl.
E0 (7.14)
z
(F)R
RATIO OFNON-ZERO
CONSTANTSCOLUMN (0)li‘ r
HINGED- i SIN 10..0 A = 0 3.1416 4.0000tr.-----.11HINGED 0,50 IX= 0
2 fi= 0t X 8 = 0 6.283 4.0000.f.t-----me---------0.333 0667
3 5c z 1 9.425 1.0000-----",..nzi
4-rs2
.........5....a' 4 .,.......n/1
X=4 0=0
1 X12.566 1.0000
n >4 AG n7 1.0000
CLAMPED . 1 f-------------4 (COS kl) A=0 4.730 -0.9825CLAMPED
2 1--..22,2----f X {X1. °=0
(COSH Itl)x 41
C = 0 7.853 -1.0008
3 1,..332.„,........A4 P.R 40.996 -4.0000-4
n>4
1..........„1...,.....rn,,...40.278 0.50 0,722 1 rx
e
.0
b .°14.137(2n+1) 7►
-1.0000+
-1.000°-2
CLAMPED 1 /--------:_=. n TAN kl= A = 0 3.927 -1.0008HINGED
20.558 . ,{ X ''X.0 TANH ki.
C . 0 7.069 -1.0000+3 1............z2, 4 wt. D- : Re 10.210 -4.0000
0.254 0.529 0,7654 f X e 0 43.352 -1.0000------osnai-- - „
n>4 lX ". 0 #11Tstat4a4 -(.0000
CLAMPED- 1 1----------_____ , (COS 10.) A=0 1,875 -0.7341FREE 2 1--------P2L... = {":°
X = 0 (COSH kt)._1 C : 0 4.694 -1.0185
3 1....,......_,,,,,....5o4 am D-*R 7.855 -0.99924
4.....=g1L221 0X =0 10.996 -1.0000+
n>4
x = { X .0 = 0r.---f-(2"---1)T 40000-
FREE-FREE
20224 0376
' IXDml
0X 0
(COS la)(COSH kl,)z
8 = 0
0 = 0TRANS
=
0(REPRESENTS
4,730 LATION)
-0.9825I3..24...,______,0,..L .4e0.60--
3 -R 7.853 -1.0008ir al 4 0 3 5 6 ITT1 r0 . 9 06
'15
{Xx:C°040.996
#4.437
-1.0000--4.0000+
0.0734 0.277 050 0723 0.927,I.,...A.,,,,,,„1..emm.t,„,
n>b ,...tP"or - 4.0000-
Figura 2.22 Vibratiile sistemelor continue - frecvente proprii i forme modale de vibratieale barelor uniforme
13
RealArnpl.
1T(=
seconds
Vector sumat time zero
Time seconds) Inlay
Phase (radians)
(a) (bl
Figura 3.2 Analiza in frecventd a vibratiilor - reprezentarea unei componente sinusoidaleca sumd de vectori rotitori
frequency frequency—f
A: 2
Figura 3.1 Analiza in frecventa a vibratiilor - planul complex
Senile Fourier
G(6,)1 i :17 2
T Ig(t)e—i2nfkt dtT/ 2
14
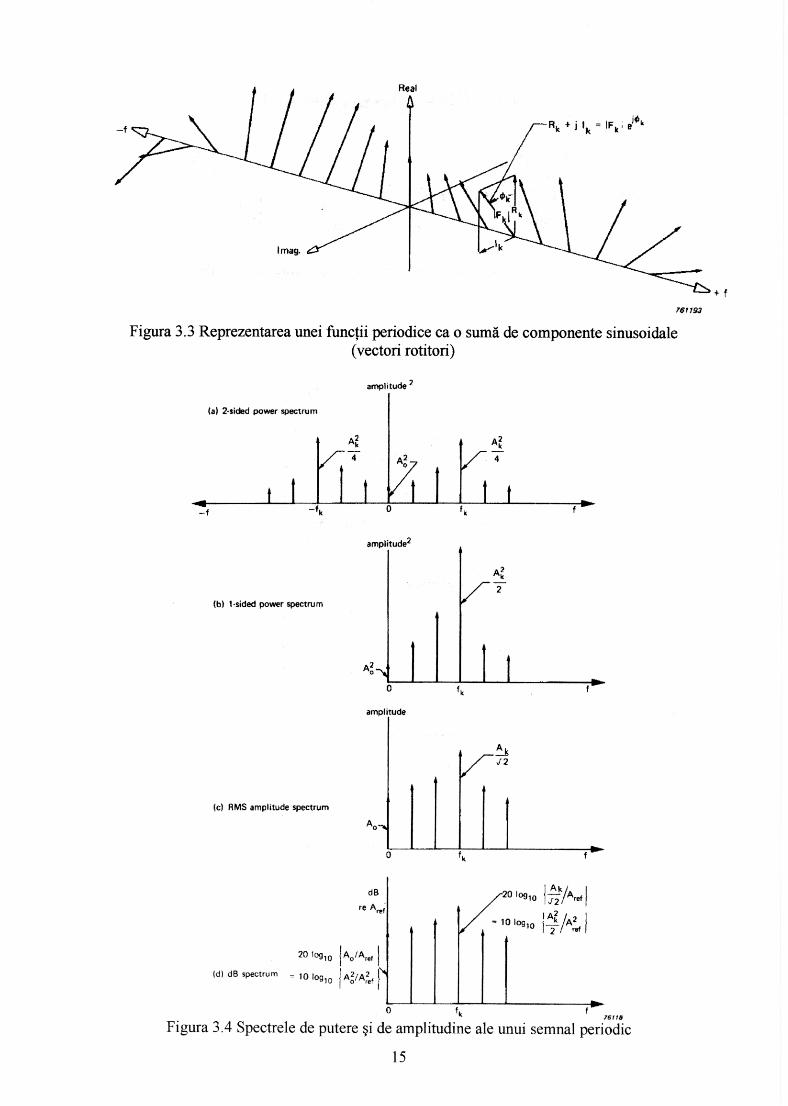
765193
Figura 3.3 Reprezentarea unei functii periodice ca o sums de componente sinusoidale(vectori rotitori)
amplitude 2
(a) 2-sided power spectrum
f
I t-f k 0
ampli ude2
(sided power spectrum /7-2-
f k
A2oThk0
amplitude
f
A kJ 2
RMS amplitude spectrum
720 log10 1----iA2I7A rei I
= 10 logto 1 A2 /A2ref
A0-.4
0
dBre Are
A2
(d) dB spectrum
20 log io Ao/Arei
= 10 log10 A.2/Ar2et
k
0 f k f76718
Figura 3.4 Spectrele de putere de amplitudine ale unui semnal periodic
15
20(y(t) = sin t + —
1 sin 3t + I
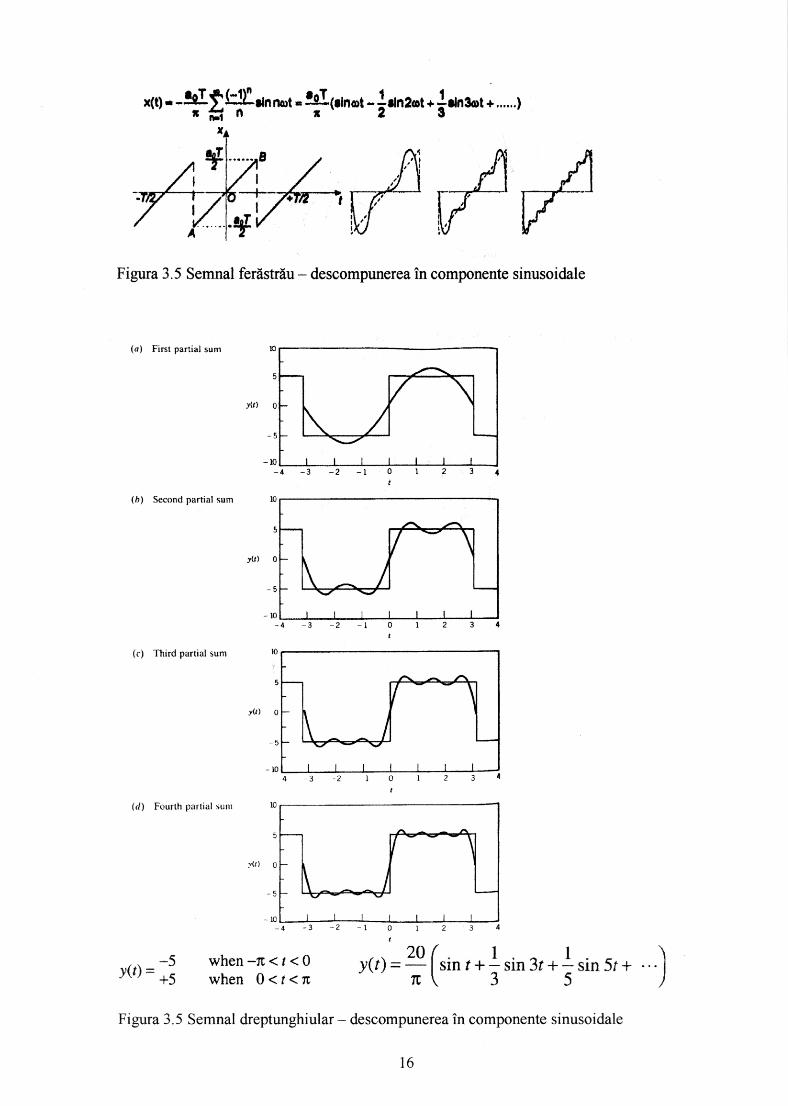
5 sin 5t +—5 when —n < t <
y(t) = +5 when 0 < t < n It
x(t) -1193—tr sin mut N-I (*Incot 4 iin2cot + i ttin3cot + x n., n x 2 3
Figura 3.5 Semnal ferdstrdu — descompunerea in componente sinusoidale
(a) First partial sum
5
At) 0
5
10
4 - 3
-2 -1
0
2
3
4
(h) Second partial sum 10
5
y(t) 0
-5
10
-4
3
2 -t
0
2
3
4
Third partial sum
Fourth partial sum
10
5
y(t) 0
-5
10
10
y(t I a
5
104
3
0
2
4
)
Figura 3.5 Semnal dreptunghiular — descompunerea in componente sinusoidale
16