






Limbile
Pagini
Legal

ALGAD 2 - Geometrie analitica si diferentiala
asist.dr. Ana Nistor
Facultatea de Hidrotehnica, Geodezie si Ingineria MediuluiUniversitatea Tehnica ”Gh. Asachi” din Iasi
Cursurile 1 - 6
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 1 / 88
Introducere
Introducere
Bibliografie:• V. Balan, C. Frigioiu, M. Roman, Geometrie Analitica, Geometrie Diferentiala siElemente de Algebra Tensoriala.• C. Deliu, Analiza matematica, algebra liniara, geometrie analitica si diferentiala- pentru studenti in invatamantul superior tehnic, 2014• P. Georgescu, G. Popa, Geometrie vectoriala, analitica si diferentiala - Problemepropuse 2009.• A.I. Lazu, Algebra si geometrie - Culegere de probleme• http://math.etc.tuiasi.ro/apletea/seminarii.htmlCuprins:
- Vectori liberi - recapitulare
I Planul si dreapta in spatiu
II Conice
III Cuadrice
IV Curbe
V Suprafete ainistor||at||tuiasi||punct||roA.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 2 / 88
Vectori liberi - recapitulare
Vectori liberi - produsul scalar
Definitie
S.n. produs scalar pe spatiul vectorilor liberi aplicatia
〈 , 〉 : V3 × V3 → R, 〈u, v〉 =
{‖u‖‖v‖ cos∠(u, v), daca u, v 6= 0,
0, daca u = 0 sau v = 0
Fie u = (u1, u2, u3)︸ ︷︷ ︸coord. eucl.
=
expr .analitica︷ ︸︸ ︷u1 i + u2 j + u3k si v = (v1, v2, v3) = v1 i + v2 j + v3k.
Atunci, expr. analitica a p.s. este 〈u, v〉 = u1v1 + u2v2 + u3v3.• ‖u‖ =
√〈u, u〉
• u ⊥ v d.n.d 〈u, v〉 = 0
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 3 / 88
Vectori liberi - recapitulare
Vectori liberi - produsul vectorial
Definitie
S.n. produs vectorial pe spatiul vectorilor liberi aplicatia
× : V3 × V3 → V3, u × v = ‖u‖‖v‖ sin∠(u, v)e
unde e este versorul(lungimea=1) perpendicular pe pl. det. de cei doi vectori siorientat dupa regula burghiului(sensul de inaintare a unui burghiu cand u se rotestecatre v formand un unghi minim.
Fie u = (u1, u2, u3)︸ ︷︷ ︸coord. eucl.
=
expr .analitica︷ ︸︸ ︷u1 i + u2 j + u3k si v = (v1, v2, v3) = v1 i + v2 j + v3k .
Atunci, expr. analitica a p.v. este u × v =
∣∣∣∣∣∣i j ku1 u2 u3
v1 v2 v3
∣∣∣∣∣∣.• u × v = 0 daca u = 0, v = 0 sau u si v sunt coliniari. ( 0 este vectorul nul!)• aria paralelogramului constr. pe u si v este ‖u × v‖.• aria triunghiului constr. pe u si v este 1
2‖u × v‖.A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 4 / 88
Vectori liberi - recapitulare
Vectori liberi - produsul mixt
Definitie
S.n. produsul mixt al vectorilor u, v , w aplicatia
(·, ·, ·) : V3 × V3 × V3 → R, (u, v , w) = 〈u, v × w〉
Fie u = (u1, u2, u3)︸ ︷︷ ︸coord. eucl.
=
expr .analitica︷ ︸︸ ︷u1 i + u2 j + u3k , v = (v1, v2, v3) = v1 i + v2 j + v3k si
w = (w1,w2,w3) = w1 i + w2 j + w3k .
Atunci, expr. analitica a produsului mixt este (u, v , w) =
∣∣∣∣∣∣u1 u2 u3
v1 v2 v3
w1 w2 w3
∣∣∣∣∣∣.• (u, v , w) = 0 daca cel putin unul dintre vectori este zero sau daca vectorii suntcoplanari.• volumul paralelipipedului det. de u, v , w este: |(u, v , w)|• volumul tetraedrului det. de u, v , w este: 1
6 |(u, v , w)|A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 5 / 88
Vectori liberi - recapitulare
Distanta dintre doua puncte
Fie reperul ortonormat R(O; i , j , k) si punctele A(x1, y1, z1), B(x2, y2, z2)si C (x3, y3, z3).Distanta dintre A si B este:
dist(A,B) =√
(x2 − x1)2 + (y2 − y1)2 + (z2 − z1)2.
Coordonatele unui punct M care imparte segmentul AB intr-un raportk ∈ R \ {−1}, AM = kMB,sunt:
xM =x1 + kx2
1 + k, yM =
y1 + ky2
1 + k, zM =
z1 + kz2
1 + k.
Mijlocul segmentului AB este M
(x1 + x2
2,y1 + y2
2,z1 + z2
2
).
Centrul de greutate al triunghiului 4ABC este:
G
(x1 + x2 + x3
3,y1 + y2 + y3
3,z1 + z2 + z3
3
).
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 6 / 88
CAP. I Planul si dreapta in spatiu Sect.1 Planul
Cap.I Planul si dreapta in spatiuSect.1 Planul
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 7 / 88
CAP. I Planul si dreapta in spatiu Sect.1 Planul
1.1 Ecuatiile planului
Fie reperul ortonormat R(O; i , j , k) si notam (P) un plan in spatiultridimensional.
Definitie
S.n. vector normal la planul (P) un vector nenul N a carui dreapta suporteste perpendiculara pe planul (P).
Definitie
S.n. vectori directori ai planului (P) doi vectori necoliniari u si v ale carordrepte suport sunt paralele cu planul (P).
Geometric, un plan poate fi unic determinat astfel:
i) un punct al planului si un vector normal la plan
ii) un punct al planului si doi vectori necoliniari din plan
iii) trei puncte necoliniare
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 8 / 88
CAP. I Planul si dreapta in spatiu Sect.1 Planul
i) Planul det. de un punct si un vector normal
Fie M0(x0, y0, z0) ∈ (P) si N = Ai + Bj + Ck normala, vector nenul, deciA,B,C nu toti zero simultan, adica A2 + B2 + C 2 > 0.
Un pct generic M(x , y , z) ∈ (P) d.n.d. M0M ⊥ N d.n.d. 〈M0M, N〉 = 0.Folosind M0M = (x − x0)i + (y − y0)j + (z − z0)k, produsul scalar devine:
(x − x0)A + (y − y0)B + (z − z0)C = 0 (1)
care s.n. ecuatia normala a planului. Echivalent, (1) devine:Ax + By + Cz + (−Ax0 − By0 − Cz0)︸ ︷︷ ︸
not. D
= 0, adica
Ax + By + Cz + D = 0 (2)
care s.n. ecuatia generala a planului.
Ex.1
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 9 / 88
CAP. I Planul si dreapta in spatiu Sect.1 Planul
ii) Planul det. de un punct si doi vectori directori
Fie M0(x0, y0, z0) ∈ (P) siv1 = l1 i + m1 j + n1k, v2 = l2 i + m2 j + n2k ∈ (P) doi vectori directori,deci necoliniari, v1 × v2 6= 0.
Un pct generic M(x , y , z) ∈ (P) d.n.d. M0M, v1, v2 sunt coplanari d.n.d.(M0M, v1, v2) = 0. Folosind expresia analitica a produsului mixt, obtinem:∣∣∣∣∣∣
x − x0 y − y0 z − z0
l1 m1 n1
l2 m2 n2
∣∣∣∣∣∣ = 0 (3)
care s.n. ecuatia unui plan det. de un pct. si doi vectori directori.
Ex.2
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 10 / 88
CAP. I Planul si dreapta in spatiu Sect.1 Planul
iii) Planul det. de trei puncte necoliniare
Fie M1(x1, y1, z1),M2(x2, y2, z2),M3(x3, y3, z3) ∈ (P) necoliniare
Un pct generic M(x , y , z) ∈ (P) d.n.d. M1M,M1M2,M1M3 suntcoplanari, d.n.d. (M1M,M1M2,M1M3) = 0.Folosind expresia analitica a produsului mixt, obtinem:∣∣∣∣∣∣
x − x1 y − y1 z − z1
x2 − x1 y2 − y1 z2 − z1
x3 − x1 y3 − y1 z3 − z1
∣∣∣∣∣∣ = 0⇔
∣∣∣∣∣∣∣∣x y z 1x1 y1 z1 1x2 y2 z2 1x3 y3 z3 1
∣∣∣∣∣∣∣∣ = 0 (4)
care s.n. ecuatia unui plan det. de trei puncte necoliniare.In particular, fie M1(a, 0, 0), M2(0, b, 0) si M3(0, 0, c) intersectiile lui (P)cu axele de coord. Atunci, obtinem ecuatia planului prin taieturi:
x
a+
y
b+
z
c− 1 = 0 (5)
Ex.3 Ex.4A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 11 / 88
CAP. I Planul si dreapta in spatiu Sect.1 Planul
1.2 Plane particulare
Ecuatia planului xOy : z = 0 Ec. unui plan paralel cu xOy : z = z0
Ecuatia planului xOz : y = 0 Ec. unui plan paralel cu xOz : y = y0
Ecuatia planului yOz : x = 0 Ec. unui plan paralel cu yOz : x = x0
Ec. unui plan paralel cu Oz : Ax + By + D = 0Ec. unui plan paralel cu Oy : Ax + Cz + D = 0Ec. unui plan paralel cu Ox : By + Cz + D = 0
Ec. unui plan care contine originea O(0, 0, 0): Ax + By + Cz = 0
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 12 / 88
CAP. I Planul si dreapta in spatiu Sect.1 Planul
1.3 Pozitia relativa a doua plane
Fie(P1) : A1x + B1y + C1z + D1 = 0(P2) : A2x + B2y + C2z + D2 = 0Notam
M =
(A1 B1 C1
A2 B2 C2
)matricea sist format din ec. planelor
M =
(A1 B1 C1 D1
A2 B2 C2 D2
)matricea extinsa
• deoarece rangM < 3 sist nu poate fi compat.det.(sol. unica) - deci2 plane nu se pot intersecta intr-un pct.• rangM = 1 si rangM = 1: sist are o infinit de sol. - planele coincid.Altfel spus: A1
A2= B1
B2= C1
C2= D1
D2
• rangM = 1 si rangM = 2: sist. incompat. - planele sunt paralele, nuau nici un pct. comun. Altfel spus: A1
A2= B1
B2= C1
C26= D1
D2
• rangM = 2 atunci si rangM = 2: sist are o infinit de sol, fara ca planelesa coincida - planele se intersecteaza dupa o dreapta. Ex.5
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 13 / 88
CAP. I Planul si dreapta in spatiu Sect.1 Planul
1.4 Unghiul a doua plane
Fie(P1) : A1x + B1y + C1z + D1 = 0 cu normala N1
(P2) : A2x + B2y + C2z + D2 = 0 cu normala N2
Definitie
Unghiul α := ∠((P1), (P2)) a doua plane este definit de unghiul format denormalele la cele doua plane.
cosα =〈N1, N2〉‖N1‖‖N2‖
(6)
Doua plane sunt perpendiculare (P1) ⊥ (P2) d.n.d. normalele lor suntperpendiculare N1 ⊥ N2, adica 〈N1, N2〉 = 0, A1A2 + B1B2 + C1C2 = 0.
Ex.6
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 14 / 88
CAP. I Planul si dreapta in spatiu Sect.1 Planul
1.5 Distanta de la un punct la un plan
Fie M0(x0, y0, z0) si (P) : Ax + By + Cz + D = 0
Distanta de la M0 /∈ (P) la (P) este data de:
dist(M0, (P)) =|Ax0 + By0 + Cz0 + D|√
A2 + B2 + C 2(7)
si reprezinta lungimea vectorului M0M ′, unde M ′ este proiectia punctuluiM0 pe planul (P).
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 15 / 88
CAP. I Planul si dreapta in spatiu Sect.2 Dreapta in spatiu
Cap.I Planul si dreapta in spatiuSect.2 Dreapta in spatiu
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 16 / 88
CAP. I Planul si dreapta in spatiu Sect.2 Dreapta in spatiu
2.1 Ecuatiile dreptei in spatiu
Fie reperul ortonormat R(O; i , j , k) si notam (d) o dreapta in spatiultridimensional.
Definitie
S.n. vector director al dreptei (d) vectorul nenul v = l i +mj + nk a caruidreapta suport este paralela cu dreapta (d).l ,m, n ∈ R s.n. parametrii directori ai lui (d).Notam v0 = 1
‖v‖ v versorul director al lui (d).
Geometric, o dreapta poate fi unic determinata astfel:
i) un punct si un vector director nenul
ii) doua puncte distincte
iii) intersectia a 2 plane
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 17 / 88
CAP. I Planul si dreapta in spatiu Sect.2 Dreapta in spatiu
i) Dreapta det. de un pct si un vector director nenul
Fie M0(x0, y0, z0) ∈ (d) si v = l i + mj + nk un vector director al lui (d)
Un pct generic M(x , y , z) ∈ (d) d.n.d. M0M, v coliniari d.n.d.∃λ ∈ R a.i.M0M = λv .Folosind M0M = (x − x0)i + (y − y0)j + (z − z0)k , egalitatea precedentadevine:
x = x0 + λl
y = y0 + λm
z = z0 + λn
(8)
care s.n. ecuatiile parametrice ale dreptei (d). Echivalent,
x − x0
l=
y − y0
m=
z − z0
n(9)
care s.n.ecuatiile canonice ale dr. (d).Ex.8
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 18 / 88
CAP. I Planul si dreapta in spatiu Sect.2 Dreapta in spatiu
ii) Dreapta det. de doua puncte distincte
Fie M1(x1, y1, z1),M2(x2, y2, z2) ∈ (d)Un vector director al lui (d) estev := M1M2 = (x2 − x1)i + (y2 − y1)j + (z2 − z1)kAtunci, ecuatia (9) pentru pctul M1 si vectorul director v de mai susdevine:
x − x1
x2 − x1=
y − y1
y2 − y1=
z − z1
z2 − z1(10)
care s.n. ecuatia dreptei prin doua puncte.Ex.9
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 19 / 88
CAP. I Planul si dreapta in spatiu Sect.2 Dreapta in spatiu
iii) Dreapta ca intersectie a doua plane
Fie planele neparalele(P1) : A1x + B1y + C1z + D1 = 0 cu normala N1
(P2) : A2x + B2y + C2z + D2 = 0 cu normala N2
Atunci ecuatia canonica a dreptei de intersectie a celor doua plane,(d) := (P1) ∩ (P2) este
x − x0
l=
y − y0
m=
z − z0
n(11)
unde punctul M0(x0, y0, z0) este o solutie a sistemului format de ecuatiile
celor doua plane iar directia dreptei este v = N1 × N2 =
∣∣∣∣∣∣i j kA1 B1 C1
A2 B2 C2
∣∣∣∣∣∣ .Altfel spus, parametrii directori sunt:
l =
∣∣∣∣B1 C1
B2 C2
∣∣∣∣ m =
∣∣∣∣C1 A1
C2 A2
∣∣∣∣ n =
∣∣∣∣A1 B1
A2 B2
∣∣∣∣ .Ex.10
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 20 / 88
CAP. I Planul si dreapta in spatiu Sect.2 Dreapta in spatiu
2.2 Drepte particulare
Ec. axei Ox :
{y = 0
z = 0Ec. axei Oy :
{x = 0
z = 0Ec. axei Oz :
{x = 0
y = 0
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 21 / 88
CAP. I Planul si dreapta in spatiu Sect.2 Dreapta in spatiu
2.3 Unghiul a doua drepte
Fie
(d1) :x − x1
l1=
y − y1
m1=
z − z1
n1, cu vect. dir. v1 = l1 i + m1 j + n1k
(d2) :x − x2
l2=
y − y2
m2=
z − z2
n2cu vect. dir. v2 = l2 i + m2 j + n2k
Definitie
Unghiul α := ∠((d1), (d2))a doua drepte este definit de unghiul format devectorii directori ai celor doua drepte.
cosα =〈v1, v2〉‖v1‖‖v2‖
(12)
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 22 / 88
CAP. I Planul si dreapta in spatiu Sect.2 Dreapta in spatiu
2.3 Unghiul a doua drepte
Fie
(d1) :x − x1
l1=
y − y1
m1=
z − z1
n1, cu vect. dir. v1 = l1 i + m1 j + n1k
(d2) :x − x2
l2=
y − y2
m2=
z − z2
n2cu vect. dir. v2 = l2 i + m2 j + n2k
• Doua dr sunt perpendiculare (d1) ⊥ (d2) d.n.d. vect. lor directori suntperp., v1 ⊥ v2 d.n.d. 〈v1, v2〉 = 0⇔ l1l2 + m1m2 + n1n2 = 0.• Doua drepte sunt paralele (d1)||(d2) d.n.d. vectorii lor directori suntparaleli, v1||v2 d.n.d. l1
l2= m1
m2= n1
n2.
! Dr. sunt paralele SAU coincid! Distinctia se face verif. daca un pct aluneia dintre drepte se afla (coincid) sau nu (paralele) pe cealalta dreapta.! doua dr. perpendiculare pot fi necoplanare !! doua dr. paralele sunt intotdeauna coplanare!• Doua drepte sunt coplanare d.n.d. v1, v2,M1M2 sunt coplanari d.n.d.
(v1, v2,M1M2) = 0⇔
∣∣∣∣∣∣x2 − x1 y2 − y1 z2 − z1
l1 m1 n1
l2 m2 n2
∣∣∣∣∣∣ = 0
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 23 / 88
CAP. I Planul si dreapta in spatiu Sect.2 Dreapta in spatiu
2.4 Unghiul dintre o dreapta si un plan
Fie
(d) :x − x0
l=
y − y0
m=
z − z0
ncu vect. dir. v1 = l i + mj + nk
(P) : Ax + By + Cz + D = 0 cu vect. normal N = Ai + Bj + Ck
Definitie
Unghiul α := ∠((d), (P)) dintre o dreapta si un plan este definit de unghiulformat de dreapta cu proiectia ei pe plan, si care este egal cu complementulunghiului format de dreapta si normala la plan.
sinα = cos(π
2− α
)=〈N, v〉‖N‖‖v‖
(13)
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 24 / 88
CAP. I Planul si dreapta in spatiu Sect.2 Dreapta in spatiu
2.5 Distanta de la un punct la o dreapta
Fie
(d) :x − x1
l=
y − y1
m=
z − z1
ncu vect. dir. v = l i + mj + nk si
M1(x1, y1, z1) ∈ (d)M0(x0, y0, z0) /∈ (d)
Distanta de la M0 la (d) este data de:
dist(M0, (d)) =‖M1M0 × v‖‖v‖
(14)
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 25 / 88
CAP. I Planul si dreapta in spatiu Sect.2 Dreapta in spatiu
2.6 Distanta dintre doua drepte
Fie
(d1) :x − x1
l1=
y − y1
m1=
z − z1
n1, cu vect. dir. v1 = l1 i + m1 j + n1k
(d2) :x − x2
l2=
y − y2
m2=
z − z2
n2cu vect. dir. v2 = l2 i + m2 j + n2k
Definitie
S.n. perpendiculara comuna a celor doua drepte dreapta unica (d) perpen-diculara pe (d1) si (d2) si care intersecteaza dreptele (d1) si (d2).
Notam M1(x1, y1, z1) ∈ (d1) si M2(x2, y2, z2) ∈ (d2).
Un vector director al perpendicularei comune (d) este:v = v1 × v2 = l i + mj + nk
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 26 / 88
CAP. I Planul si dreapta in spatiu Sect.2 Dreapta in spatiu
2.6 Distanta dintre doua drepte
Dreapta (d) = (P1) ∩ (P2) se obtine ca intersectia planelor
(P1) det. de M1 si vect dir ai dr (d1) si (d) :
∣∣∣∣∣∣x − x1 y − y1 z − z1
l1 m1 n1
l m n
∣∣∣∣∣∣ = 0
si
(P2) det. de M2 si vect dir ai dr (d2) si (d) :
∣∣∣∣∣∣x − x2 y − y2 z − z2
l2 m2 n2
l m n
∣∣∣∣∣∣ = 0
Atunci,dist((d1), (d2)) = lungimea perpendicularei comune = inaltimeaparalelipipedului construit pe vect. v1, v2, M1M2 cu baza data deparalelogramul format de v1 si v2.
dist((d1), (d2)) =|(M1M2, v1, v2)|‖v1 × v2‖
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 27 / 88
CAP. I Planul si dreapta in spatiu Sect.3 Dreapta in plan
Cap.I Planul si dreapta in spatiuSect.3 Dreapta in plan
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 28 / 88
CAP. I Planul si dreapta in spatiu Sect.3 Dreapta in plan
3.1 Ecuatiile dreptei in plan
Fie R(O; i , j) un reper ortonormat in plan.Geometric, o dreapta in plan este unic determinata astfel:
i) un punct si un vector director
ii) doua puncte
iii) un punct si panta
iv) un punct si o directie normala
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 29 / 88
CAP. I Planul si dreapta in spatiu Sect.3 Dreapta in plan
i) dr. det. de un pct si un vect. director
Fie M0(x0, y0) si v = l i + mj vect. director nenul (l2 + m2 > 0)
Ecuatiax − x0
l=
y − y0
m(15)
s.n ec. canonica a dreptei.Calculand m︸︷︷︸
not.a
x −l︸︷︷︸not.b
+ ly0 −mx0︸ ︷︷ ︸not.c
= 0 obtinem:
ax + by + c = 0 (16)
care s.n.ec. generala a dreptei in plan.Egaland (15) cu un parametru real λ avem{
x = x0 + λl
y = y0 + λm(17)
care s.n. ecuatiile parametrice ale dreptei in plan.A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 30 / 88
CAP. I Planul si dreapta in spatiu Sect.3 Dreapta in plan
ii) dr. det. de doua puncte
Fie M1(x1, y1) si M2(x2, y2)
Ecuatiax − x1
x2 − x1=
y − y1
y2 − y1(18)
s.n ec. canonica a dreptei det. de doua puncte.
In particular, fie o dreapta (d) care nu trece prin O(0, 0) si nu e paralelacu axele de coord. Notam (d) ∩ Ox = A(a, 0) si (d) ∩ Oy = B(0, b) a.i.ab 6= 0Atunci, ec. (18) devine
x
a+
y
b− 1 = 0 (19)
care s.n ec. prin taieturi a unei drepte in plan.
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 31 / 88
CAP. I Planul si dreapta in spatiu Sect.3 Dreapta in plan
3.2 Panta unei drepte in plan
Fieax + by + c = 0 (20)
ec. gen. a unei drepte neparalele cu Oy , adica b 6= 0.Echivalent,
y = −a
b︸︷︷︸not.m
x −c
b︸︷︷︸not.n
si obtinemy = mx + n (21)
care s.n. ec. redusa a dreptei.•m s.n. panta dreptei•n reprezinta ordonata intersectiei dr. cu Oy .
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 32 / 88
CAP. I Planul si dreapta in spatiu Sect.3 Dreapta in plan
3.2 Panta unei drepte in plan
Fie(d) : y = mx + n dr. neparalela cu OyM1(x1, y1) ∈ (d), atunci verif ec. dr.: y1 = mx1 + nsiM2(x2, y2) ∈ (d), atunci verif. ec. dr.: y2 = mx2 + nScazand cele 2 relatii obtinem expresia pantei m = y2−y1
x2−x1:= tan θ,
unde θ = ∠(semiaxa poz Ox, semidr. de pe (d) situata deas. lui Ox)
m > 0 d.n.d. θ este unghi ascutit
m < 0 d.n.d. θ este unghi obtuz
m = 0 d.n.d. (d)||Ox
Obs.iii) O dreapta (d) este unic determinata de un punct de pedreapta M0(x0, y0) ∈ (d) si panta sa m. Fie un pct generic de pe dreaptaM(x , y) ∈ (d). Avem: m = y−y0
x−x0, adica, ec. dr.(d) : y − y0 = m(x − x0)
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 33 / 88
CAP. I Planul si dreapta in spatiu Sect.3 Dreapta in plan
3.3 Drepte particulare in plan
Ecuatia axei Ox : y = 0 Ecuatia unei drepte paralele cu Ox : y = y0
Ecuatia axei Oy : x = 0 Ecuatia unei drepte paralele cu Oy : x = x0
Ecuatia primei bisectoare: y = xEcuatia celei de-a2a bisectoare: y = −x
Ex.7 Ex.8
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 34 / 88
CAP. I Planul si dreapta in spatiu Sect.3 Dreapta in plan
3.4 Unghiul a doua drepte in plan
Fie(d1) : x−x1
l1= y−y1
m1, cu vect. dir. v1 = l1 i + m1 j
(d2) : x−x2l2
= y−y2m2
cu vect. dir. v2 = l2 i + m2 j
Definitie
Unghiul α := ∠((d1), (d2))a doua drepte este definit de unghiul format devectorii directori ai celor doua drepte.
cosα =〈v1, v2〉‖v1‖‖v2‖
(22)
• Doua dr sunt perp. (d1) ⊥ (d2) d.n.d. v1 ⊥ v2 ⇔ l1l2 + m1m2 = 0.• Doua dr sunt paralele (d1)||(d2) d.n.d. v1||v2 ⇐⇒ l1
l2= m1
m2.
Cu pante:• Doua dr sunt perpendiculare d.n.d. produsul pantelor = −1• Doua dr sunt paralele d.n.d. pantele sunt egale.
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 35 / 88
CAP. I Planul si dreapta in spatiu Sect.3 Dreapta in plan
3.5 Distanta de la un pct la o dreapta in plan
Fie (d) : ax + by + c = 0 ec. gen a unei drepte in plansi M0(x0, y0) /∈ (d)
Atunci N = ai + bj , vect. nenul, este perpendicular pe (d).
Distanta de la pctul M0 la dreapta (d) este:
dist(M0, (d)) =|ax0 + by0 + c|√
a2 + b2
Obs. iv) O dreapta (d) poate fi unic determinata in plan de unpunct al dreptei M1(x1, y1) ∈ (d) si o directie normala N = ai + bj:(d) : a(x − x1) + b(y − y1) = 0.
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 36 / 88
CAP. II Conice Sect.1 Conice pe ecuatii canonice
Cap.II ConiceSect.1 Conice pe ecuatii canonice
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 37 / 88
CAP. II Conice Sect.1 Conice pe ecuatii canonice
Introducere
Fie F un pct si (d) o dreapta in plan.
Definitie
L.g. al pctelor M din plan pt. care raportul distantelor de la M la pctul fixF si de la M la dreapta (d) este constant s.n. conica.Pctul F s.n. focarul conicei.Dreapta (d) s.n. dreapta directoare a conicei.Raportul constant din definitia conicei s.n. excentricitatea conicei si senoteaza e.
Daca F ∈ (d), atunci conica s.n. degenerata.Daca F /∈ (d), atunci conica s.n. nedegenerata.
e ∈ (0, 1) - conica de tip eliptic; s.n. elipsa
e = 1 - conica de tip parabolic; s.n. parabola
e ∈ (1,∞) - conica de tip hiperbolic; s.n. hiperbola
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 38 / 88
CAP. II Conice Sect.1 Conice pe ecuatii canonice
1.1 Cercul
Definitie
Cercul este l.g. al pctelor din plan egal departate de un pct. fix numitcentru.
Fie C (x0, y0)- centrul, r -raza.Un pct generic M(x , y) ∈ C(C , r) d.n.d ‖CM‖ = r .Echivalent, obtinem
(x − x0)2 + (y − y0)2 = r2 (23)
care s.n. ec.canonica a cercului C(C , r).O ecuatie de forma:
x2 + y2 + 2mx + 2ny + p = 0, cu m2 + n2 − p > 0
reprez. ec. generala a unui cerc cu C (−m,−n) si r =√
m2 + n2 − p.
Ec. (23) este echivalenta cu:
{x = x0 + r cos t
y = y0 + r sin t, t ∈ [0, 2π)care s.n. ec. parametrice ale cercului.
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 39 / 88
CAP. II Conice Sect.1 Conice pe ecuatii canonice
1.1 Cercul
Pozitia relativa a unei drepte fata de un cerc
Fie(d) : ax + by + c = 0 si(C) : (x − x0)2 + (y − y0)2 = r2, cu centrul C (x0, y0)
Notam dist(C , (d)) =|ax0 + by0 + c |√
a2 + b2
dist(C , (d)) > r : (d) ∩ (C) = ∅, (d) e exterioara cercului
dist(C , (d)) = r : (d) ∩ (C) = {un punct}, (d) e tangenta cercului
dist(C , (d)) < r : (d) ∩ (C) = {2 puncte}, (d) e secanta cercului
Ecuatia tangentei la cerc intr-un pct al cercului M1(x1, y1) ∈ (C) seobtine prin dedublare: (x1 − x0)(x − x0) + (y1 − y0)(y − y0) = r2
Ex.1
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 40 / 88
CAP. II Conice Sect.1 Conice pe ecuatii canonice
1.2 Elipsa
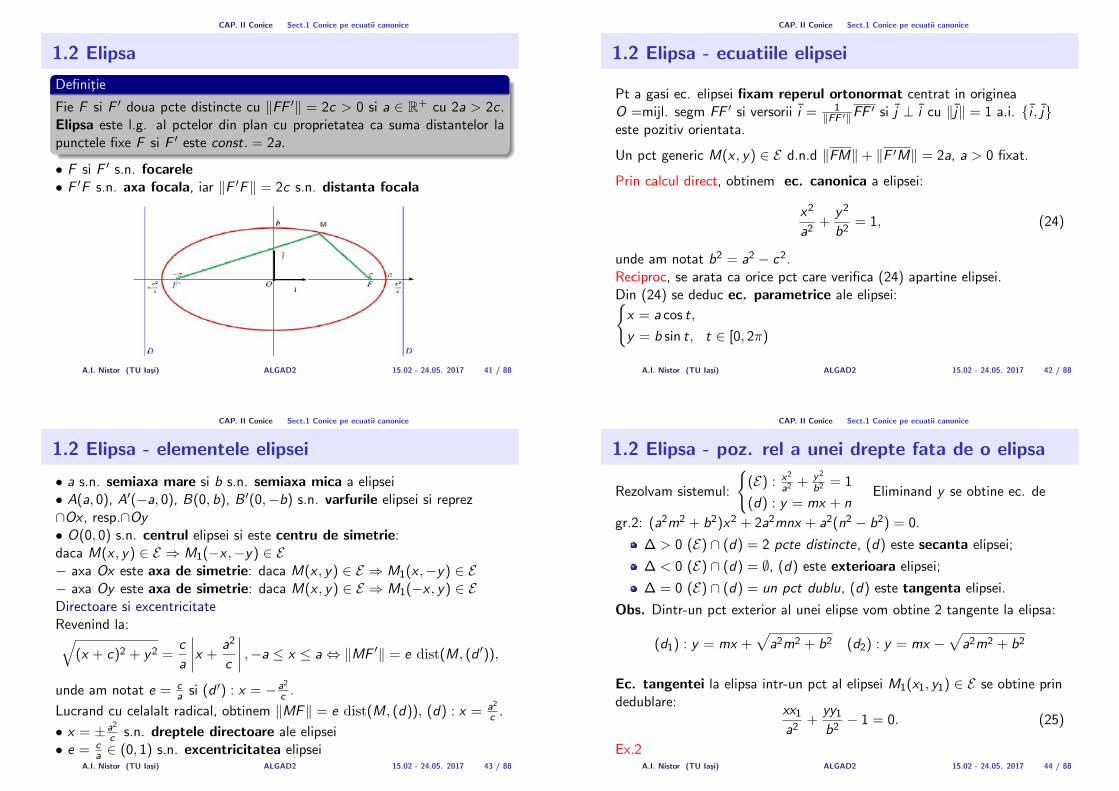
Definitie
Fie F si F ′ doua pcte distincte cu ‖FF ′‖ = 2c > 0 si a ∈ R+ cu 2a > 2c .Elipsa este l.g. al pctelor din plan cu proprietatea ca suma distantelor lapunctele fixe F si F ′ este const. = 2a.
• F si F ′ s.n. focarele• F ′F s.n. axa focala, iar ‖F ′F‖ = 2c s.n. distanta focala
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 41 / 88
CAP. II Conice Sect.1 Conice pe ecuatii canonice
1.2 Elipsa - ecuatiile elipsei
Pt a gasi ec. elipsei fixam reperul ortonormat centrat in origineaO =mijl. segm FF ′ si versorii i = 1
‖FF ′‖FF′ si j ⊥ i cu ‖j‖ = 1 a.i. {i , j}
este pozitiv orientata.
Un pct generic M(x , y) ∈ E d.n.d ‖FM‖+ ‖F ′M‖ = 2a, a > 0 fixat.
Prin calcul direct, obtinem ec. canonica a elipsei:
x2
a2+
y2
b2= 1, (24)
unde am notat b2 = a2 − c2.Reciproc, se arata ca orice pct care verifica (24) apartine elipsei.Din (24) se deduc ec. parametrice ale elipsei:{x = a cos t,
y = b sin t, t ∈ [0, 2π)
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 42 / 88
CAP. II Conice Sect.1 Conice pe ecuatii canonice
1.2 Elipsa - elementele elipsei
• a s.n. semiaxa mare si b s.n. semiaxa mica a elipsei• A(a, 0), A′(−a, 0), B(0, b), B ′(0,−b) s.n. varfurile elipsei si reprez∩Ox , resp.∩Oy• O(0, 0) s.n. centrul elipsei si este centru de simetrie:daca M(x , y) ∈ E ⇒ M1(−x ,−y) ∈ E− axa Ox este axa de simetrie: daca M(x , y) ∈ E ⇒ M1(x ,−y) ∈ E− axa Oy este axa de simetrie: daca M(x , y) ∈ E ⇒ M1(−x , y) ∈ EDirectoare si excentricitateRevenind la:√
(x + c)2 + y2 =c
a
∣∣∣∣x +a2
c
∣∣∣∣ ,−a ≤ x ≤ a⇔ ‖MF ′‖ = e dist(M, (d ′)),
unde am notat e = ca si (d ′) : x = −a2
c .
Lucrand cu celalalt radical, obtinem ‖MF‖ = e dist(M, (d)), (d) : x = a2
c .
• x = ±a2
c s.n. dreptele directoare ale elipsei• e = c
a ∈ (0, 1) s.n. excentricitatea elipseiA.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 43 / 88
CAP. II Conice Sect.1 Conice pe ecuatii canonice
1.2 Elipsa - poz. rel a unei drepte fata de o elipsa
Rezolvam sistemul:
{(E) : x2
a2 + y2
b2 = 1
(d) : y = mx + nEliminand y se obtine ec. de
gr.2: (a2m2 + b2)x2 + 2a2mnx + a2(n2 − b2) = 0.
∆ > 0 (E) ∩ (d) = 2 pcte distincte, (d) este secanta elipsei;
∆ < 0 (E) ∩ (d) = ∅, (d) este exterioara elipsei;
∆ = 0 (E) ∩ (d) = un pct dublu, (d) este tangenta elipsei.
Obs. Dintr-un pct exterior al unei elipse vom obtine 2 tangente la elipsa:
(d1) : y = mx +√
a2m2 + b2 (d2) : y = mx −√
a2m2 + b2
Ec. tangentei la elipsa intr-un pct al elipsei M1(x1, y1) ∈ E se obtine prindedublare:
xx1
a2+
yy1
b2− 1 = 0. (25)
Ex.2A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 44 / 88
CAP. II Conice Sect.1 Conice pe ecuatii canonice
1.3 Hiperbola
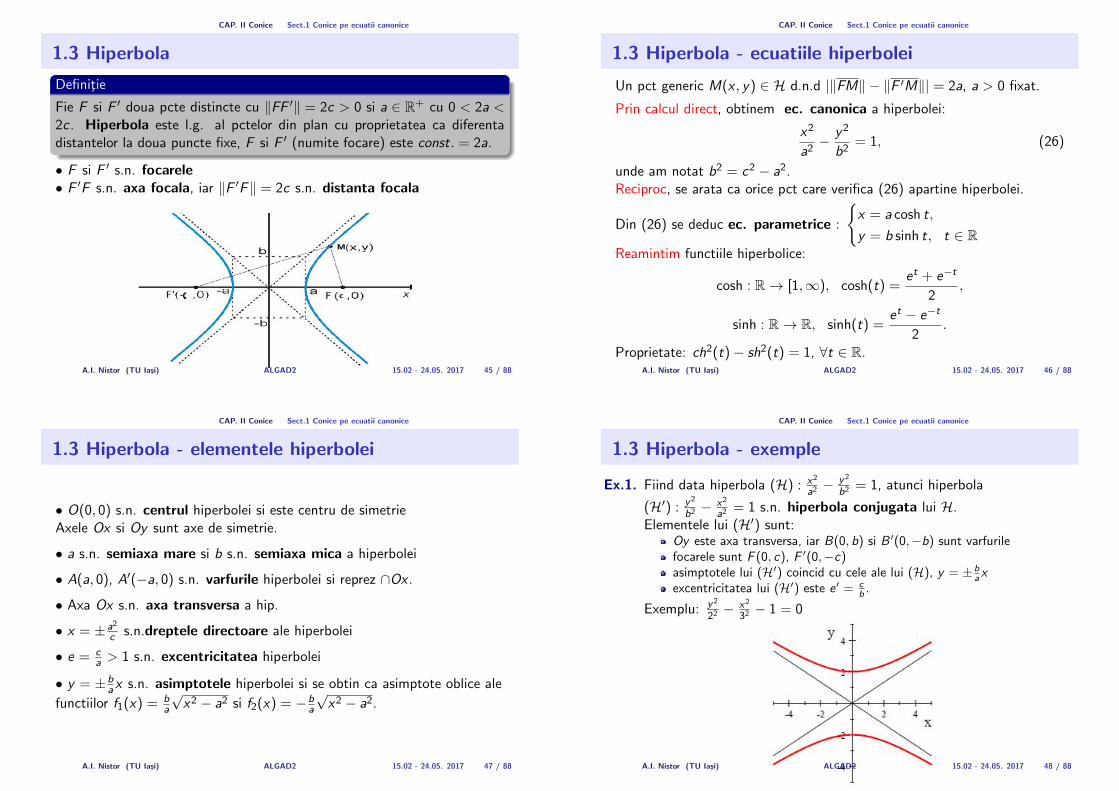
Definitie
Fie F si F ′ doua pcte distincte cu ‖FF ′‖ = 2c > 0 si a ∈ R+ cu 0 < 2a <2c. Hiperbola este l.g. al pctelor din plan cu proprietatea ca diferentadistantelor la doua puncte fixe, F si F ′ (numite focare) este const. = 2a.
• F si F ′ s.n. focarele• F ′F s.n. axa focala, iar ‖F ′F‖ = 2c s.n. distanta focala
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 45 / 88
CAP. II Conice Sect.1 Conice pe ecuatii canonice
1.3 Hiperbola - ecuatiile hiperbolei
Un pct generic M(x , y) ∈ H d.n.d |‖FM‖ − ‖F ′M‖| = 2a, a > 0 fixat.
Prin calcul direct, obtinem ec. canonica a hiperbolei:
x2
a2− y2
b2= 1, (26)
unde am notat b2 = c2 − a2.Reciproc, se arata ca orice pct care verifica (26) apartine hiperbolei.
Din (26) se deduc ec. parametrice :
{x = a cosh t,
y = b sinh t, t ∈ RReamintim functiile hiperbolice:
cosh : R→ [1,∞), cosh(t) =et + e−t
2,
sinh : R→ R, sinh(t) =et − e−t
2.
Proprietate: ch2(t)− sh2(t) = 1, ∀t ∈ R.A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 46 / 88
CAP. II Conice Sect.1 Conice pe ecuatii canonice
1.3 Hiperbola - elementele hiperbolei
• O(0, 0) s.n. centrul hiperbolei si este centru de simetrieAxele Ox si Oy sunt axe de simetrie.
• a s.n. semiaxa mare si b s.n. semiaxa mica a hiperbolei
• A(a, 0), A′(−a, 0) s.n. varfurile hiperbolei si reprez ∩Ox .
• Axa Ox s.n. axa transversa a hip.
• x = ±a2
c s.n.dreptele directoare ale hiperbolei
• e = ca > 1 s.n. excentricitatea hiperbolei
• y = ±bax s.n. asimptotele hiperbolei si se obtin ca asimptote oblice ale
functiilor f1(x) = ba
√x2 − a2 si f2(x) = −b
a
√x2 − a2.
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 47 / 88
CAP. II Conice Sect.1 Conice pe ecuatii canonice
1.3 Hiperbola - exemple
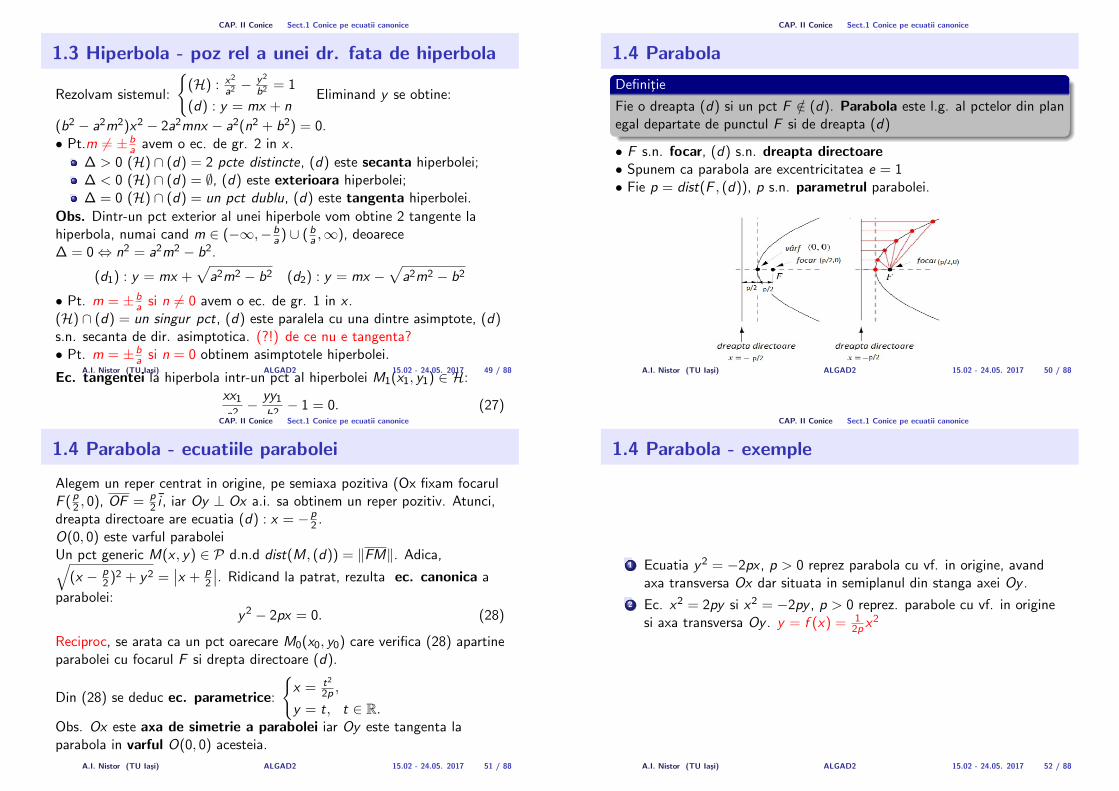
Ex.1. Fiind data hiperbola (H) : x2
a2 − y2
b2 = 1, atunci hiperbola
(H′) : y2
b2 − x2
a2 = 1 s.n. hiperbola conjugata lui H.Elementele lui (H′) sunt:
Oy este axa transversa, iar B(0, b) si B ′(0,−b) sunt varfurilefocarele sunt F (0, c), F ′(0,−c)asimptotele lui (H′) coincid cu cele ale lui (H), y = ± b
a xexcentricitatea lui (H′) este e′ = c
b .
Exemplu: y2
22 − x2
32 − 1 = 0
Ex.2. Daca a = b, hiperbola de ecuatie
x2 − y2 = a2
s.n. hiperbola echilatera, avand asimptotele date de bisectoareleaxelor de coordonate, y = x si y = −x .Exemplu: x2 − y2 = 1
Ex.3. Expresiaxy = ±a2
reprezinta doua hiperbole echilatere, avand ca axe de simetriebisectoarele axelor iar ca asimptote axele de coordonate.Exemplu: xy = 22 (rosu) xy = −22 (verde) Obs. y = ± 4
x
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 48 / 88
CAP. II Conice Sect.1 Conice pe ecuatii canonice
1.3 Hiperbola - poz rel a unei dr. fata de hiperbola
Rezolvam sistemul:
{(H) : x2
a2 − y2
b2 = 1
(d) : y = mx + nEliminand y se obtine:
(b2 − a2m2)x2 − 2a2mnx − a2(n2 + b2) = 0.• Pt.m 6= ±b
a avem o ec. de gr. 2 in x .
∆ > 0 (H) ∩ (d) = 2 pcte distincte, (d) este secanta hiperbolei;∆ < 0 (H) ∩ (d) = ∅, (d) este exterioara hiperbolei;∆ = 0 (H) ∩ (d) = un pct dublu, (d) este tangenta hiperbolei.
Obs. Dintr-un pct exterior al unei hiperbole vom obtine 2 tangente lahiperbola, numai cand m ∈ (−∞,−b
a ) ∪ (ba ,∞), deoarece∆ = 0⇔ n2 = a2m2 − b2.
(d1) : y = mx +√
a2m2 − b2 (d2) : y = mx −√
a2m2 − b2
• Pt. m = ±ba si n 6= 0 avem o ec. de gr. 1 in x .
(H) ∩ (d) = un singur pct, (d) este paralela cu una dintre asimptote, (d)s.n. secanta de dir. asimptotica. (?!) de ce nu e tangenta?• Pt. m = ±b
a si n = 0 obtinem asimptotele hiperbolei.
Ec. tangentei la hiperbola intr-un pct al hiperbolei M1(x1, y1) ∈ H:xx1
a2− yy1
b2− 1 = 0. (27)
Ex.1
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 49 / 88
CAP. II Conice Sect.1 Conice pe ecuatii canonice
1.4 Parabola
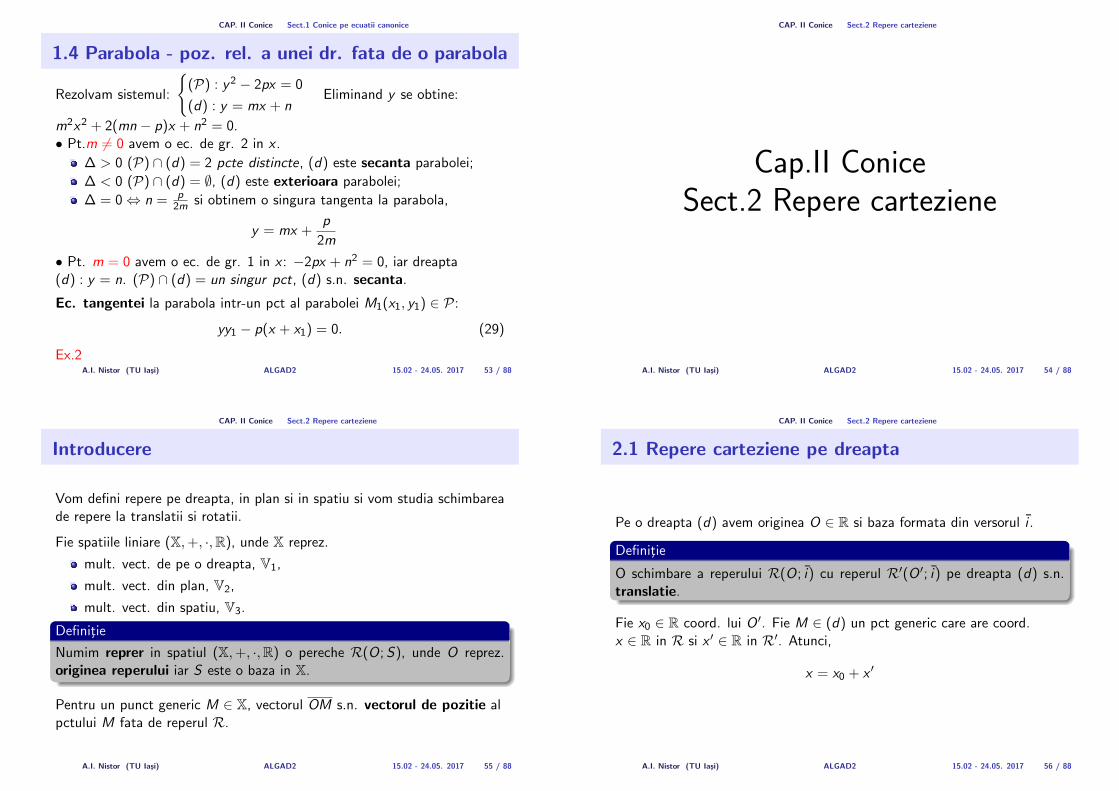
Definitie
Fie o dreapta (d) si un pct F /∈ (d). Parabola este l.g. al pctelor din planegal departate de punctul F si de dreapta (d)
• F s.n. focar, (d) s.n. dreapta directoare• Spunem ca parabola are excentricitatea e = 1• Fie p = dist(F , (d)), p s.n. parametrul parabolei.
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 50 / 88
CAP. II Conice Sect.1 Conice pe ecuatii canonice
1.4 Parabola - ecuatiile parabolei
Alegem un reper centrat in origine, pe semiaxa pozitiva (Ox fixam focarulF (p2 , 0), OF = p
2 i , iar Oy ⊥ Ox a.i. sa obtinem un reper pozitiv. Atunci,dreapta directoare are ecuatia (d) : x = −p
2 .O(0, 0) este varful paraboleiUn pct generic M(x , y) ∈ P d.n.d dist(M, (d)) = ‖FM‖. Adica,√
(x − p2 )2 + y2 =
∣∣x + p2
∣∣. Ridicand la patrat, rezulta ec. canonica a
parabolei:y2 − 2px = 0. (28)
Reciproc, se arata ca un pct oarecare M0(x0, y0) care verifica (28) apartineparabolei cu focarul F si drepta directoare (d).
Din (28) se deduc ec. parametrice:
{x = t2
2p ,
y = t, t ∈ R.Obs. Ox este axa de simetrie a parabolei iar Oy este tangenta laparabola in varful O(0, 0) acesteia.
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 51 / 88
CAP. II Conice Sect.1 Conice pe ecuatii canonice
1.4 Parabola - exemple
1 Ecuatia y2 = −2px , p > 0 reprez parabola cu vf. in origine, avandaxa transversa Ox dar situata in semiplanul din stanga axei Oy .
2 Ec. x2 = 2py si x2 = −2py , p > 0 reprez. parabole cu vf. in originesi axa transversa Oy . y = f (x) = 1
2p x2
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 52 / 88
CAP. II Conice Sect.1 Conice pe ecuatii canonice
1.4 Parabola - poz. rel. a unei dr. fata de o parabola
Rezolvam sistemul:
{(P) : y2 − 2px = 0
(d) : y = mx + nEliminand y se obtine:
m2x2 + 2(mn − p)x + n2 = 0.• Pt.m 6= 0 avem o ec. de gr. 2 in x .
∆ > 0 (P) ∩ (d) = 2 pcte distincte, (d) este secanta parabolei;
∆ < 0 (P) ∩ (d) = ∅, (d) este exterioara parabolei;
∆ = 0⇔ n = p2m si obtinem o singura tangenta la parabola,
y = mx +p
2m
• Pt. m = 0 avem o ec. de gr. 1 in x : −2px + n2 = 0, iar dreapta(d) : y = n. (P) ∩ (d) = un singur pct, (d) s.n. secanta.
Ec. tangentei la parabola intr-un pct al parabolei M1(x1, y1) ∈ P:
yy1 − p(x + x1) = 0. (29)
Ex.2A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 53 / 88
CAP. II Conice Sect.2 Repere carteziene
Cap.II ConiceSect.2 Repere carteziene
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 54 / 88
CAP. II Conice Sect.2 Repere carteziene
Introducere
Vom defini repere pe dreapta, in plan si in spatiu si vom studia schimbareade repere la translatii si rotatii.
Fie spatiile liniare (X,+, ·,R), unde X reprez.
mult. vect. de pe o dreapta, V1,
mult. vect. din plan, V2,
mult. vect. din spatiu, V3.
Definitie
Numim reprer in spatiul (X,+, ·,R) o pereche R(O;S), unde O reprez.originea reperului iar S este o baza in X.
Pentru un punct generic M ∈ X, vectorul OM s.n. vectorul de pozitie alpctului M fata de reperul R.
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 55 / 88
CAP. II Conice Sect.2 Repere carteziene
2.1 Repere carteziene pe dreapta
Pe o dreapta (d) avem originea O ∈ R si baza formata din versorul i .
Definitie
O schimbare a reperului R(O; i) cu reperul R′(O ′; i) pe dreapta (d) s.n.translatie.
Fie x0 ∈ R coord. lui O ′. Fie M ∈ (d) un pct generic care are coord.x ∈ R in R si x ′ ∈ R in R′. Atunci,
x = x0 + x ′
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 56 / 88
CAP. II Conice Sect.2 Repere carteziene
2.2 Repere carteziene in plan - translatia
Fie reperul cartezian ortonormat R(O; i , j), pctul O ′(x0, y0) si consid.reperul cartezian ortonormat R′(O ′; i , j).
Definitie
O schimbare a reperului R(O; i , j) cu reperul R′(O ′; i , j) in plan s.n. trans-latie.
Pt un pct generic M din plan, notam
(x , y) coord in R(x ′, y ′) coord in R′
Atunci,{x = x0 + x ′
y = y0 + y ′Matriceal :
(xy
)=
(1 00 1
)(x0
y0
)+
(x ′
y ′
)
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 57 / 88
CAP. II Conice Sect.2 Repere carteziene
2.2 Repere carteziene in plan - translatia
Justificare:
OM = OO ′ + O ′M ⇐⇒
x i + y j = x0 i + y0 j + x ′ i + y ′ j
Deci, schimbarea de coordonate la translatie este:
{x = x0 + x ′
y = y0 + y ′
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 58 / 88
CAP. II Conice Sect.2 Repere carteziene
2.2 Repere carteziene in plan - rotatia
Fie R′(O; i ′, j ′) un reper cartezian ortonormat obtinut prin rotirea cu ununghi α ∈ [0, π) a reperului R(O; i , j).
Definitie
O schimbare a reperului R(O; i , j) cu reperul R′(O; i ′, j ′) in plan s.n. ro-tatie.
Pp. ca R′ este la fel orientat cu R
〈i , i〉 = 1 〈i , j〉 = 0 〈j , j〉 = 1
〈i ′, i〉 = cosα (30)
〈j ′, i〉 = cos(α +π
2) = − sinα
〈i ′, j〉 = cos(π
2− α) = sinα
〈j ′, j〉 = cosα
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 59 / 88
CAP. II Conice Sect.2 Repere carteziene
2.2 Repere carteziene in plan - rotatia
Pt un pct generic M din plan, notam
(x , y) coord in R(x ′, y ′) coord in R′. Deci, OM = x i + y j = x ′ i ′ + y ′ j ′
Inmultim scalar cu i apoi cu j :x〈i , i〉+ y〈j , i〉 = x ′〈i ′, i〉+ y ′〈j ′, i〉x〈i , j〉+ y〈j , j〉 = x ′〈i ′, j〉+ y ′〈j ′, j〉Inlocuind (30), obtinem schimbarea de coordonate la rotatie:{
x = x ′ cosα− y ′ sinα
y = x ′ sinα + y ′ cosαMatriceal :
(xy
)=
(cosα − sinαsinα cosα
)(x ′
y ′
)
Matricea schimbarii de coordonate C =
(cosα − sinαsinα cosα
)este ortogonala,
C−1 = CT , deci rotatia in plan este o transformare ortogonala. detC = 1
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 60 / 88
CAP. II Conice Sect.2 Repere carteziene
2.2 Repere carteziene in plan - rotatia
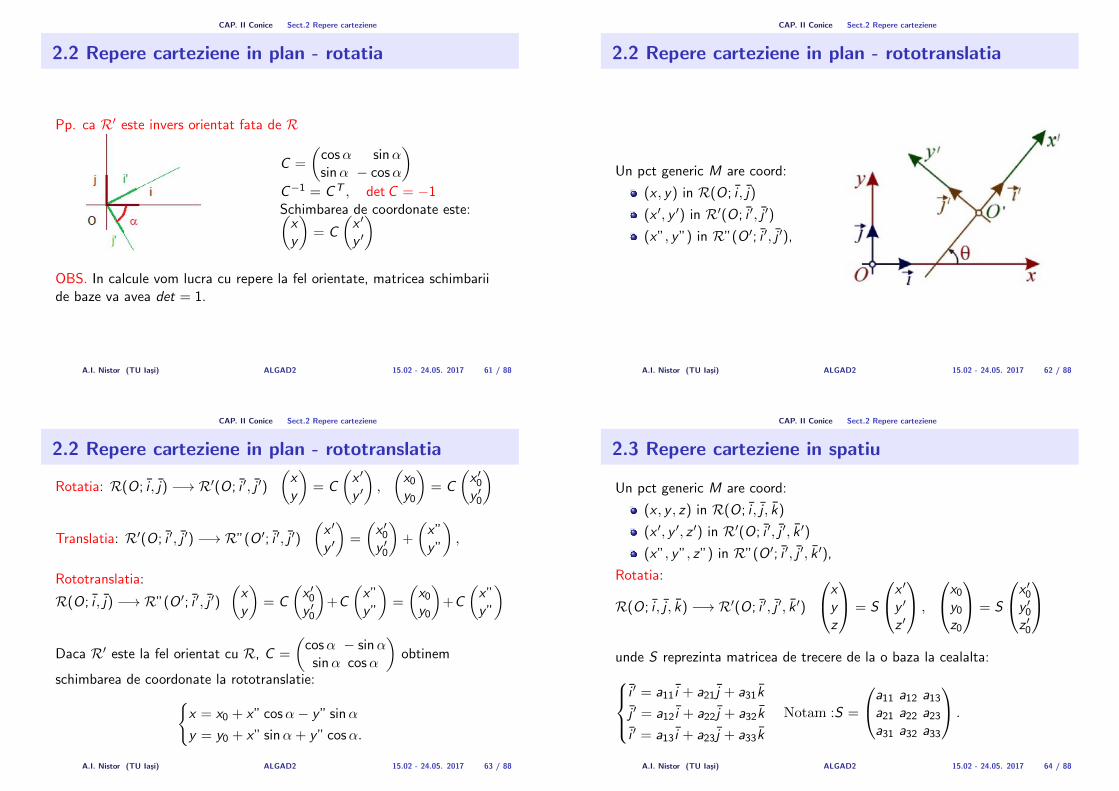
Pp. ca R′ este invers orientat fata de R
C =
(cosα sinαsinα − cosα
)C−1 = CT , detC = −1Schimbarea de coordonate este:(xy
)= C
(x ′
y ′
)OBS. In calcule vom lucra cu repere la fel orientate, matricea schimbariide baze va avea det = 1.
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 61 / 88
CAP. II Conice Sect.2 Repere carteziene
2.2 Repere carteziene in plan - rototranslatia
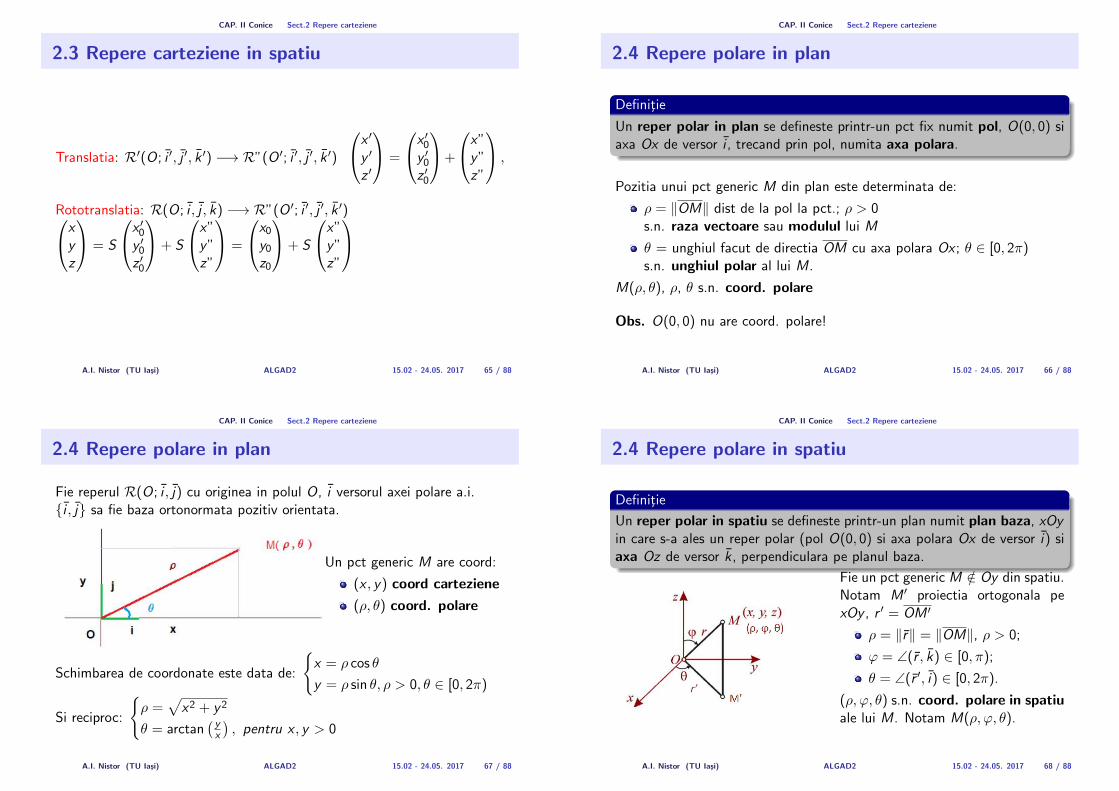
Un pct generic M are coord:
(x , y) in R(O; i , j)
(x ′, y ′) in R′(O; i ′, j ′)
(x”, y”) in R”(O ′; i ′, j ′),
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 62 / 88
CAP. II Conice Sect.2 Repere carteziene
2.2 Repere carteziene in plan - rototranslatia
Rotatia: R(O; i , j) −→ R′(O; i ′, j ′)
(xy
)= C
(x ′
y ′
),
(x0
y0
)= C
(x ′0y ′0
)
Translatia: R′(O; i ′, j ′) −→ R”(O ′; i ′, j ′)
(x ′
y ′
)=
(x ′0y ′0
)+
(x”y”
),
Rototranslatia:
R(O; i , j) −→ R”(O ′; i ′, j ′)
(xy
)= C
(x ′0y ′0
)+C
(x”y”
)=
(x0
y0
)+C
(x”y”
)
Daca R′ este la fel orientat cu R, C =
(cosα − sinα
sinα cosα
)obtinem
schimbarea de coordonate la rototranslatie:{x = x0 + x” cosα− y” sinα
y = y0 + x” sinα + y” cosα.
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 63 / 88
CAP. II Conice Sect.2 Repere carteziene
2.3 Repere carteziene in spatiu
Un pct generic M are coord:
(x , y , z) in R(O; i , j , k)
(x ′, y ′, z ′) in R′(O; i ′, j ′, k ′)
(x”, y”, z”) in R”(O ′; i ′, j ′, k ′),
Rotatia:
R(O; i , j , k) −→ R′(O; i ′, j ′, k ′)
xyz
= S
x ′
y ′
z ′
,
x0
y0
z0
= S
x ′0y ′0z ′0
unde S reprezinta matricea de trecere de la o baza la cealalta:i ′ = a11 i + a21 j + a31k
j ′ = a12 i + a22 j + a32k
i ′ = a13 i + a23 j + a33k
Notam :S =
a11 a12 a13
a21 a22 a23
a31 a32 a33
.
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 64 / 88
CAP. II Conice Sect.2 Repere carteziene
2.3 Repere carteziene in spatiu
Translatia: R′(O; i ′, j ′, k ′) −→ R”(O ′; i ′, j ′, k ′)
x ′
y ′
z ′
=
x ′0y ′0z ′0
+
x”y”z”
,
Rototranslatia: R(O; i , j , k) −→ R”(O ′; i ′, j ′, k ′)xyz
= S
x ′0y ′0z ′0
+ S
x”y”z”
=
x0
y0
z0
+ S
x”y”z”
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 65 / 88
CAP. II Conice Sect.2 Repere carteziene
2.4 Repere polare in plan
Definitie
Un reper polar in plan se defineste printr-un pct fix numit pol, O(0, 0) siaxa Ox de versor i , trecand prin pol, numita axa polara.
Pozitia unui pct generic M din plan este determinata de:
ρ = ‖OM‖ dist de la pol la pct.; ρ > 0s.n. raza vectoare sau modulul lui M
θ = unghiul facut de directia OM cu axa polara Ox ; θ ∈ [0, 2π)s.n. unghiul polar al lui M.
M(ρ, θ), ρ, θ s.n. coord. polare
Obs. O(0, 0) nu are coord. polare!
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 66 / 88
CAP. II Conice Sect.2 Repere carteziene
2.4 Repere polare in plan
Fie reperul R(O; i , j) cu originea in polul O, i versorul axei polare a.i.{i , j} sa fie baza ortonormata pozitiv orientata.
Un pct generic M are coord:
(x , y) coord carteziene
(ρ, θ) coord. polare
Schimbarea de coordonate este data de:
{x = ρ cos θ
y = ρ sin θ, ρ > 0, θ ∈ [0, 2π)
Si reciproc:
{ρ =
√x2 + y2
θ = arctan( yx
), pentru x , y > 0
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 67 / 88
CAP. II Conice Sect.2 Repere carteziene
2.4 Repere polare in spatiu
Definitie
Un reper polar in spatiu se defineste printr-un plan numit plan baza, xOyin care s-a ales un reper polar (pol O(0, 0) si axa polara Ox de versor i) siaxa Oz de versor k , perpendiculara pe planul baza.
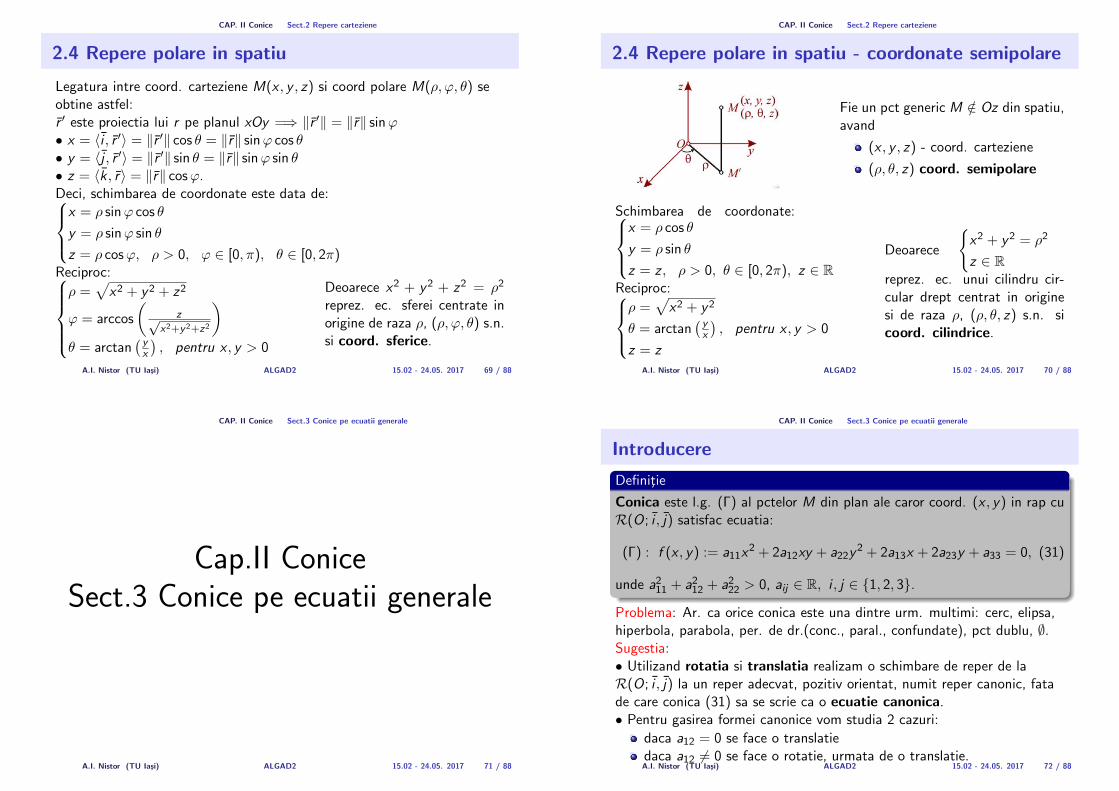
Fie un pct generic M /∈ Oy din spatiu.Notam M ′ proiectia ortogonala pexOy , r ′ = OM ′
ρ = ‖r‖ = ‖OM‖, ρ > 0;
ϕ = ∠(r , k) ∈ [0, π);
θ = ∠(r ′, i) ∈ [0, 2π).
(ρ, ϕ, θ) s.n. coord. polare in spatiuale lui M. Notam M(ρ, ϕ, θ).
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 68 / 88
CAP. II Conice Sect.2 Repere carteziene
2.4 Repere polare in spatiu
Legatura intre coord. carteziene M(x , y , z) si coord polare M(ρ, ϕ, θ) seobtine astfel:r ′ este proiectia lui r pe planul xOy =⇒ ‖r ′‖ = ‖r‖ sinϕ• x = 〈i , r ′〉 = ‖r ′‖ cos θ = ‖r‖ sinϕ cos θ• y = 〈j , r ′〉 = ‖r ′‖ sin θ = ‖r‖ sinϕ sin θ• z = 〈k , r〉 = ‖r‖ cosϕ.Deci, schimbarea de coordonate este data de:x = ρ sinϕ cos θ
y = ρ sinϕ sin θ
z = ρ cosϕ, ρ > 0, ϕ ∈ [0, π), θ ∈ [0, 2π)Reciproc:ρ =
√x2 + y2 + z2
ϕ = arccos
(z√
x2+y2+z2
)θ = arctan
( yx
), pentru x , y > 0
Deoarece x2 + y2 + z2 = ρ2
reprez. ec. sferei centrate inorigine de raza ρ, (ρ, ϕ, θ) s.n.si coord. sferice.
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 69 / 88
CAP. II Conice Sect.2 Repere carteziene
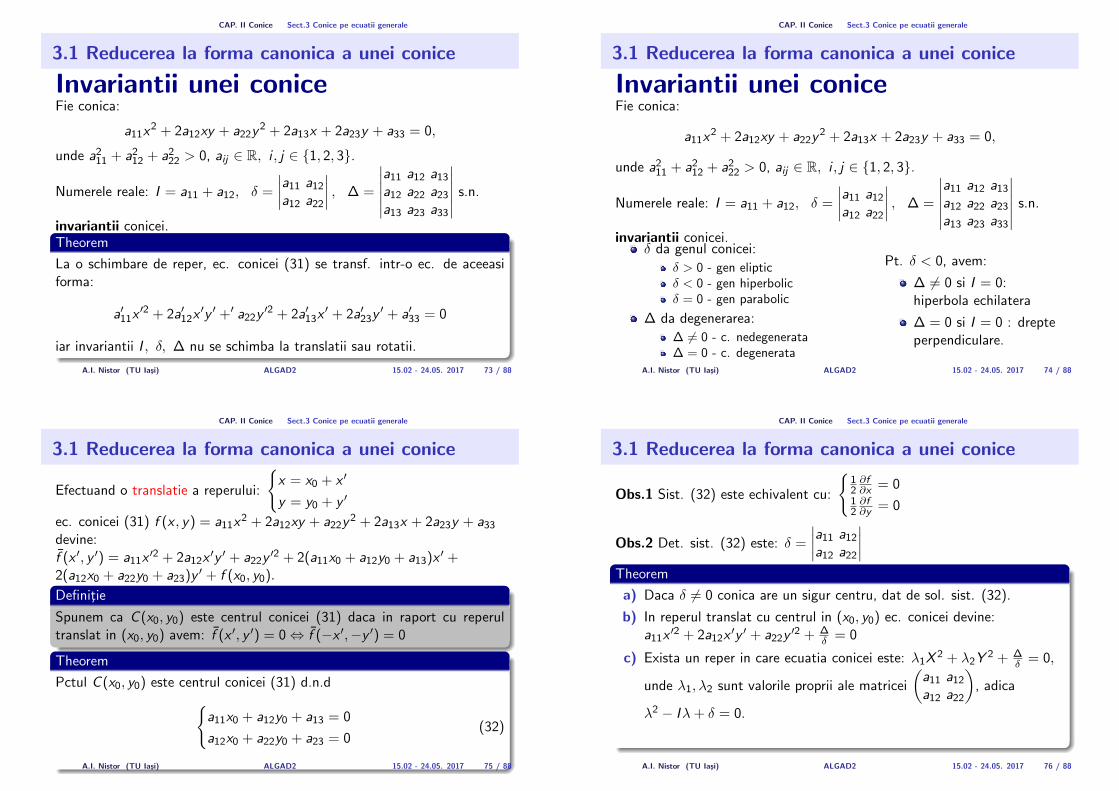
2.4 Repere polare in spatiu - coordonate semipolare
Fie un pct generic M /∈ Oz din spatiu,avand
(x , y , z) - coord. carteziene
(ρ, θ, z) coord. semipolare
Schimbarea de coordonate:x = ρ cos θ
y = ρ sin θ
z = z , ρ > 0, θ ∈ [0, 2π), z ∈ RReciproc:ρ =
√x2 + y2
θ = arctan( yx
), pentru x , y > 0
z = z
Deoarece
{x2 + y2 = ρ2
z ∈ Rreprez. ec. unui cilindru cir-cular drept centrat in originesi de raza ρ, (ρ, θ, z) s.n. sicoord. cilindrice.
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 70 / 88
CAP. II Conice Sect.3 Conice pe ecuatii generale
Cap.II ConiceSect.3 Conice pe ecuatii generale
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 71 / 88
CAP. II Conice Sect.3 Conice pe ecuatii generale
Introducere
Definitie
Conica este l.g. (Γ) al pctelor M din plan ale caror coord. (x , y) in rap cuR(O; i , j) satisfac ecuatia:
(Γ) : f (x , y) := a11x2 + 2a12xy + a22y
2 + 2a13x + 2a23y + a33 = 0, (31)
unde a211 + a2
12 + a222 > 0, aij ∈ R, i , j ∈ {1, 2, 3}.
Problema: Ar. ca orice conica este una dintre urm. multimi: cerc, elipsa,hiperbola, parabola, per. de dr.(conc., paral., confundate), pct dublu, ∅.Sugestia:• Utilizand rotatia si translatia realizam o schimbare de reper de laR(O; i , j) la un reper adecvat, pozitiv orientat, numit reper canonic, fatade care conica (31) sa se scrie ca o ecuatie canonica.• Pentru gasirea formei canonice vom studia 2 cazuri:
daca a12 = 0 se face o translatiedaca a12 6= 0 se face o rotatie, urmata de o translatie.
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 72 / 88
CAP. II Conice Sect.3 Conice pe ecuatii generale
3.1 Reducerea la forma canonica a unei conice
Invariantii unei coniceFie conica:
a11x2 + 2a12xy + a22y
2 + 2a13x + 2a23y + a33 = 0,
unde a211 + a2
12 + a222 > 0, aij ∈ R, i , j ∈ {1, 2, 3}.
Numerele reale: I = a11 + a12, δ =
∣∣∣∣a11 a12
a12 a22
∣∣∣∣ , ∆ =
∣∣∣∣∣∣a11 a12 a13
a12 a22 a23
a13 a23 a33
∣∣∣∣∣∣ s.n.
invariantii conicei.Theorem
La o schimbare de reper, ec. conicei (31) se transf. intr-o ec. de aceeasiforma:
a′11x′2 + 2a′12x
′y ′ +′ a22y′2 + 2a′13x
′ + 2a′23y′ + a′33 = 0
iar invariantii I , δ, ∆ nu se schimba la translatii sau rotatii.
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 73 / 88
CAP. II Conice Sect.3 Conice pe ecuatii generale
3.1 Reducerea la forma canonica a unei conice
Invariantii unei coniceFie conica:
a11x2 + 2a12xy + a22y
2 + 2a13x + 2a23y + a33 = 0,
unde a211 + a2
12 + a222 > 0, aij ∈ R, i , j ∈ {1, 2, 3}.
Numerele reale: I = a11 + a12, δ =
∣∣∣∣a11 a12
a12 a22
∣∣∣∣ , ∆ =
∣∣∣∣∣∣a11 a12 a13
a12 a22 a23
a13 a23 a33
∣∣∣∣∣∣ s.n.
invariantii conicei.δ da genul conicei:
δ > 0 - gen elipticδ < 0 - gen hiperbolicδ = 0 - gen parabolic
∆ da degenerarea:
∆ 6= 0 - c. nedegenerata∆ = 0 - c. degenerata
Pt. δ < 0, avem:
∆ 6= 0 si I = 0:hiperbola echilatera
∆ = 0 si I = 0 : drepteperpendiculare.
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 74 / 88
CAP. II Conice Sect.3 Conice pe ecuatii generale
3.1 Reducerea la forma canonica a unei conice
Efectuand o translatie a reperului:
{x = x0 + x ′
y = y0 + y ′
ec. conicei (31) f (x , y) = a11x2 + 2a12xy + a22y
2 + 2a13x + 2a23y + a33
devine:f (x ′, y ′) = a11x
′2 + 2a12x′y ′ + a22y
′2 + 2(a11x0 + a12y0 + a13)x ′ +2(a12x0 + a22y0 + a23)y ′ + f (x0, y0).
Definitie
Spunem ca C (x0, y0) este centrul conicei (31) daca in raport cu reperultranslat in (x0, y0) avem: f (x ′, y ′) = 0⇔ f (−x ′,−y ′) = 0
Theorem
Pctul C (x0, y0) este centrul conicei (31) d.n.d{a11x0 + a12y0 + a13 = 0
a12x0 + a22y0 + a23 = 0(32)
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 75 / 88
CAP. II Conice Sect.3 Conice pe ecuatii generale
3.1 Reducerea la forma canonica a unei conice
Obs.1 Sist. (32) este echivalent cu:
{12∂f∂x = 0
12∂f∂y = 0
Obs.2 Det. sist. (32) este: δ =
∣∣∣∣a11 a12
a12 a22
∣∣∣∣Theorem
a) Daca δ 6= 0 conica are un sigur centru, dat de sol. sist. (32).
b) In reperul translat cu centrul in (x0, y0) ec. conicei devine:a11x
′2 + 2a12x′y ′ + a22y
′2 + ∆δ = 0
c) Exista un reper in care ecuatia conicei este: λ1X2 + λ2Y
2 + ∆δ = 0,
unde λ1, λ2 sunt valorile proprii ale matricei
(a11 a12
a12 a22
), adica
λ2 − Iλ+ δ = 0.
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 76 / 88
CAP. II Conice Sect.3 Conice pe ecuatii generale
3.1 Reducerea la forma canonica a unei conice
Concluzii1 Daca δ 6= 0, at. conica are un centru de simetrie, originea reperului
canonic. Conice cu centru:
∆ 6= 0: cerc, elipsa, hiperbola;∆ = 0: per. de dr. concurente, un pct dublu, ∅
2 Daca δ = 0,at. conica NU are centru de simetrie. Conice fara centru:
∆ 6= 0: parabola∆ = 0: per. de dr.paralele sau confundate, sau ∅
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 77 / 88
CAP. II Conice Sect.3 Conice pe ecuatii generale
3.1 Reducerea la forma canonica a unei conice
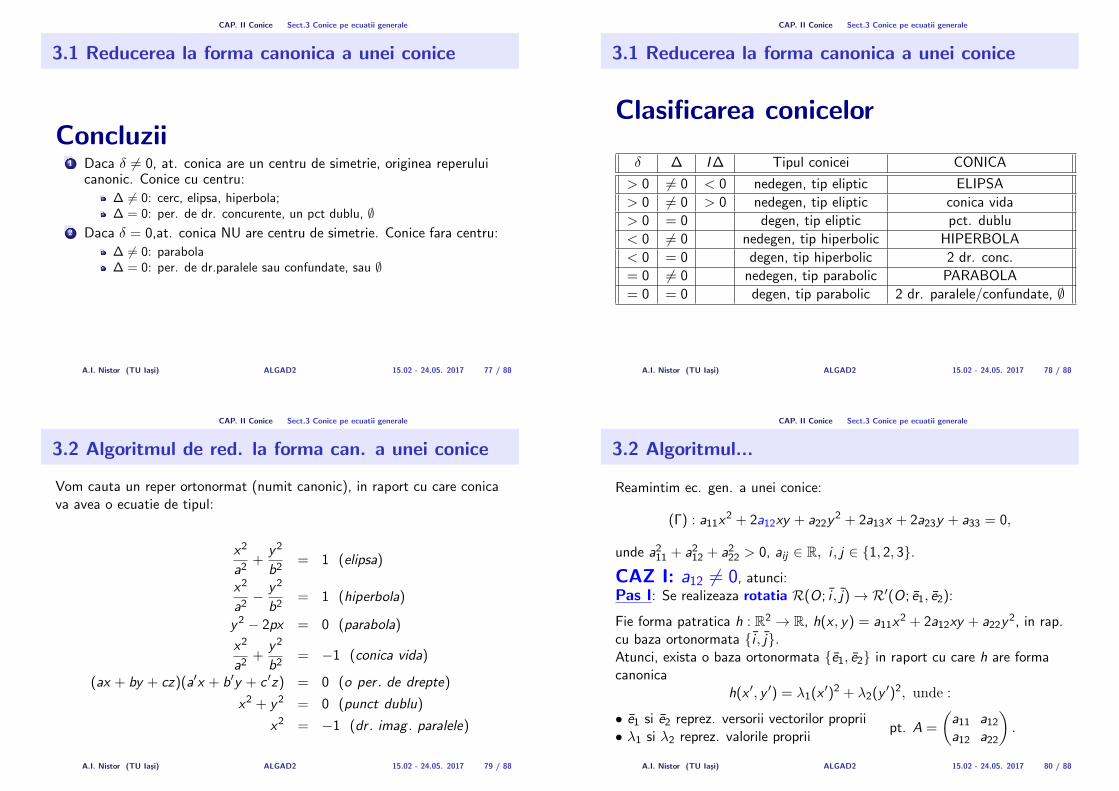
Clasificarea conicelor
δ ∆ I∆ Tipul conicei CONICA
> 0 6= 0 < 0 nedegen, tip eliptic ELIPSA
> 0 6= 0 > 0 nedegen, tip eliptic conica vida
> 0 = 0 degen, tip eliptic pct. dublu
< 0 6= 0 nedegen, tip hiperbolic HIPERBOLA
< 0 = 0 degen, tip hiperbolic 2 dr. conc.
= 0 6= 0 nedegen, tip parabolic PARABOLA
= 0 = 0 degen, tip parabolic 2 dr. paralele/confundate, ∅
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 78 / 88
CAP. II Conice Sect.3 Conice pe ecuatii generale
3.2 Algoritmul de red. la forma can. a unei conice
Vom cauta un reper ortonormat (numit canonic), in raport cu care conicava avea o ecuatie de tipul:
x2
a2+
y2
b2= 1 (elipsa)
x2
a2− y2
b2= 1 (hiperbola)
y2 − 2px = 0 (parabola)
x2
a2+
y2
b2= −1 (conica vida)
(ax + by + cz)(a′x + b′y + c ′z) = 0 (o per . de drepte)
x2 + y2 = 0 (punct dublu)
x2 = −1 (dr . imag . paralele)
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 79 / 88
CAP. II Conice Sect.3 Conice pe ecuatii generale
3.2 Algoritmul...
Reamintim ec. gen. a unei conice:
(Γ) : a11x2 + 2a12xy + a22y
2 + 2a13x + 2a23y + a33 = 0,
unde a211 + a2
12 + a222 > 0, aij ∈ R, i , j ∈ {1, 2, 3}.
CAZ I: a12 6= 0, atunci:Pas I: Se realizeaza rotatia R(O; i , j)→ R′(O; e1, e2):
Fie forma patratica h : R2 → R, h(x , y) = a11x2 + 2a12xy + a22y
2, in rap.cu baza ortonormata {i , j}.Atunci, exista o baza ortonormata {e1, e2} in raport cu care h are formacanonica
h(x ′, y ′) = λ1(x ′)2 + λ2(y ′)2, unde :
• e1 si e2 reprez. versorii vectorilor proprii• λ1 si λ2 reprez. valorile proprii
pt. A =
(a11 a12
a12 a22
).
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 80 / 88
CAP. II Conice Sect.3 Conice pe ecuatii generale
3.2 Algoritmul...
Pentru a det. λ1 si λ2 rezolvam ec. caract.:∣∣∣∣a11 − λ a12
a12 a22 − λ
∣∣∣∣ = 0⇔ λ2 − (a11 + a22)λ+ a11a22 − a212 = 0.
Distingem cazurile:
i) λ1 si λ2 au semne contrare, adica δ < 0, conica fiind de genhiperbolic;
ii) λ1 si λ2 au acelasi semn, adica δ > 0, conica fiind de gen eliptic;
iii) una dintre radacini este 0, adica δ = 0, conica fiind de gen parabolic.
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 81 / 88
CAP. II Conice Sect.3 Conice pe ecuatii generale
3.2 Algoritmul...
Coresp. val. proprii λ1 si λ2 det. vect. proprii u =
(u1
u2
)si v =
(v1
v2
)rez. sist.:
{(a11 − λ)u1 + a12u2 = 0
a11u1 + (a22 − λ)u2 = 0,
{(a11 − λ)v1 + a12v2 = 0
a11v1 + (a22 − λ)v2 = 0.
Ortonormam e1 = 1‖u‖ u si e2 = 1
‖v‖ v .
Astfel, versorii vectorilor proprii, (e1, e2), dau directiile noilor axe de coord,Ox ′ si respectiv Oy ′.
Notand e1 = a1 i + a2 j , e2 = b1 i + b2 j , matricea de rotatie: R =
(a1 b1
a2 b2
)satisface cond. detR = 1 pt. a avea repere la fel orientate.Avem in vedere: • posibilit. inloc. unuia dintre versori cu opusul sausau • renumerot. versorilor.
Facem sch. de coord.:
(xy
)= R
(x ′
y ′
).
Ec. conicei devine: λ1x′2 + λ2y
′2 + 2a′13x′ + 2a′23y
′ + a′33 = 0
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 82 / 88
CAP. II Conice Sect.3 Conice pe ecuatii generale
3.2 Algoritmul...
Pas II: Se face translatia R′(O; e1, e2)→ R”(C ; e1, e2).Daca λ1λ2 6= 0 conica va fi o conica cu centru. Det. coord lui C (x0, y0)rezolvand sistemul (32):{
a11x0 + a12y0 + a13 = 0
a12x0 + a22y0 + a23 = 0
Forma canonica va fi:
λ1X2 + λ2Y
2 +∆
δ= 0.
Reprez. grafic conica in reperul R”(C ; e1, e2).
Stop!
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 83 / 88
CAP. II Conice Sect.3 Conice pe ecuatii generale
3.2 Algoritmul...
Pas III: λ1λ2 = 0Una dintre val proprii este 0. Pp. ca λ2 6= 0.Ec. conicei in reperul R′ devine: λ2y
′2 + 2a′13x′ + 2a′23y
′ + a′33 = 0.
Rstrangem patratele si efectuam o translatie, astfel:
λ2
(y ′2 + 2
a′23λ2
y ′ +(a′23λ2
)2)
=(a′23)2
λ2− a′33 − 2a′13x
′ ⇔
λ2
y ′ +a′23
λ2︸ ︷︷ ︸Y
2
= −2a′13
x ′ +a′33 −
(a′23)2
λ2
2a′13︸ ︷︷ ︸X
Translatia R′(O; e1, e2)→ R”(V ; e1, e2):
y ′ = Y − a′23λ2
x ′ = X −a′33−
(a′23)2
λ22a′13
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 84 / 88
CAP. II Conice Sect.3 Conice pe ecuatii generale
3.2 Algoritmul...
Forma canonica: Y 2 = −2a′13λ2
X• Daca a′13 = 0, conica se reduce la 2 dr. confundate.• Daca a′13 6= 0, conica este o parabola.Varful parabolei va fi si originea noului reper. Coord. varfului in reperul
rotit R ′ sunt: x ′0 =a′33−
(a′23)2
λ22a′13
si y ′0 = −a′23λ2
.
In reperul initial R(O; i , j), coord. varfului V (x0, y0), care coincid cu
coord. originii reperului final, se obtin aplicand rotatia:
(x0
y0
)= R
(x ′0y ′0
).
Axa de simetrie a parabolei trece prin V si are vect normal dat de vect.propriu coresp. val. proprii nenule λ2.
Reprez. grafic conica in reperul R”(V ; e1, e2).
Stop!
CAZ II: a12 = 0, atunci se trece la Pas II.A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 85 / 88
CAP. III Cuadrice Cuadrice pe ecuatii canonice
Cursurile 7 - 8
Cap.III CuadriceCuadrice pe ecuatii canonice
Sfera, Elipsoidul, Hiperboloidul cu o panza, Hiperboloidul cu 2 panze,Paraboloidul elipric, Paraboloidul hiperbolic , Cilindri, Conul.
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 86 / 88
CAP. IV Curbe Sect. 2 Curbe in spatiu
Cursurile 9 - 11
Cap.IV Curbe
Sect. 1 Curbe in planSect. 2 Curbe in spatiu
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 87 / 88
CAP. V Suprafete
Cursurile 12 - 14
Cap.V Suprafete
Introducere, Exemple de suprafete regulate in R3, Planul tangent,Normala, Prima forma fundamentala,(A doua forma fundamentala, Curbura Gaussiana, Curbura medie)
A.I. Nistor (TU Iasi) ALGAD2 15.02 - 24.05. 2017 88 / 88
Top Related