xa.yimg.com · PDF fileP R E F A T A In ultimul timp, au apˇarut nevoi enorme de modele...
236
Ioan ROS ¸CA CALCUL NUMERIC Elemente de teoria aproximarii
Transcript of xa.yimg.com · PDF fileP R E F A T A In ultimul timp, au apˇarut nevoi enorme de modele...

Ioan ROSCA
CALCUL NUMERICElemente de teoria aproximarii

P R E F A T A
In ultimul timp, au aparut nevoi enorme de modele matematice totmai sofisticate si simulari pe calculator tot mai vaste si complexe.In acest mod, doua activitati nedespartite modelarea matematicasi simularea pe calculator au cıstigat un rol major ın toate ramurilestiintei, tehnologiei si industriei.
Pentru ca aceste doua activitati sa fie statornicite pe un terencıt mai solid, rigoarea matematica este indispensabila. Din acestmotiv doua stiinte ınrudite analiza numerica si softul stiintificpar etape esentiale ın validarea modelelor matematice si simularilepe calculator ce sınt bazate pe acestea.
Prezentele note se adreseaz@a studen@tilor de la cursul de CalculNumeric.
Prin continut, aceaste note reflecta nu atıt preferintele autorului,ci mai ales optiunile sale privitoare la tematica unui curs de calculnumeric pentru studentii Facultatii de matematica si informatica.Cartea poate fi utilizata de un cerc larg de cititori, fiind acesi-bila acelora care poseda cunostinte fundamentale de matematica( analiza, algebra, geometrie, etc. ). In ideea de a face aceste notede sine statatoare a fost introdus in final un capitol de anexe.
Aceasta carte a fost procesata de autor folosind programul LATEXbine adaptat pentru prelucrarea textelor matematice.
Bucuresti 2011 Autorul

Cuprins
1 Clase de functii ın teoria aproximarii 9
1 Clasa functiilor polinomiale . . . . . . . . . . . . . . . . . . . 10
1.1 Polinoame algebrice . . . . . . . . . . . . . . . . . . . 10
1.2 Polinoame ortogonale . . . . . . . . . . . . . . . . . . 15
1.3 Polinoame trigonometrice . . . . . . . . . . . . . . . . 23
2 Clasa functiilor spline . . . . . . . . . . . . . . . . . . . . . . 28
2.1 Functii polinomiale pe portiuni . . . . . . . . . . . . . 28
2.2 Functii spline polinomiale . . . . . . . . . . . . . . . . 30
2.3 Functii spline generalizate . . . . . . . . . . . . . . . 56
2 Metode de interpolare 79
3 Probleme de interpolare . . . . . . . . . . . . . . . . . . . . . 79
3.1 Exemple simple de interpolare . . . . . . . . . . . . . 79
3.2 O schema de interpolare abstracta . . . . . . . . . . . 80
4 Interpolare prin polinoame . . . . . . . . . . . . . . . . . . . . 83
4.1 Interpolarea prin polinoame algebrice . . . . . . . . . 83
4.2 Interpolarea prin polinoame trigonometrice . . . . . . 101
5 Interpolare cu functii spline . . . . . . . . . . . . . . . . . . . 109
5.1 Interpolarea functiilor continue cu functiispline polinomiale de ordinul ıntıi . . . . . . . . . . . 109
5.2 Interpolarea cu functii polinomiale de gradultrei pe portiuni . . . . . . . . . . . . . . . . . . . . . . 115
5

6 CUPRINS
5.3 Interpolarea prin functii spline cubice . . . . . . . . . 118
6 Interpolare in Rn . . . . . . . . . . . . . . . . . . . . . . . . . 128
6.1 P - unisolventa . . . . . . . . . . . . . . . . . . . . . 129
6.2 Interpolarea prin polinoame . . . . . . . . . . . . . . 131
3 Cea mai buna aproximare 139
7 Cea mai buna aproximare in spatii normate . . . . . . . . . . 140
7.1 Caracterizarea elementelor de cea mai buna aproximare143
7.2 Existenta elementelor de cea mai bunaaproximare . . . . . . . . . . . . . . . . . . . . . . . . 150
7.3 Unicitatea elementelor de cea mai bunaaproximare . . . . . . . . . . . . . . . . . . . . . . . . 154
8 Cea mai buna aproximare a functiilor continue . . . . . . . . 161
8.1 Cea mai buna aproximare prin functii spline . . . . . . 168
4 Integrarea si derivarea numerica 173
9 Constructia formulelor de aproximare . . . . . . . . . . . . . 173
9.1 Scheme abstracte . . . . . . . . . . . . . . . . . . . . . 173
9.2 Metode compozite de integrare numerica . . . . . . . . 176
9.3 Constructia generala a formulelor de cuadraturacompuse . . . . . . . . . . . . . . . . . . . . . . . . . . 178
9.4 Metode de integrare numerica de tip Gauss . . . . . . 181
10 Evaluarea erorii in formulele de aproximare . . . . . . . . . . 185
10.1 Forma integrala a restului . . . . . . . . . . . . . . . . 185
10.2 Evaluarea restului . . . . . . . . . . . . . . . . . . . . 187
11 Formule de cuadratura optimale . . . . . . . . . . . . . . . . 194
11.1 Formule optimale ın sensul lui Sard . . . . . . . . . . 194
11.2 Optimalitate ın sens Golomb - Weinberger . . . . . . 197
11.3 Formule optimale pe spatii abstracte . . . . . . . . . . 200
12 Convergenta formulelor de cuadratura . . . . . . . . . . . . . 204
12.1 Imposibilitatea convergentei tari . . . . . . . . . . . . 205

CUPRINS 7
12.2 Convergenta punctuala . . . . . . . . . . . . . . . . . 207
12.3 Convergenta formulelor de cuadratura compuse . . . . 209
13 Formule de cubatura . . . . . . . . . . . . . . . . . . . . . . . 210
13.1 Constructia formulelor de cubatura . . . . . . . . . . 210
5 ANEXE 221
14 Operatori liniari continui . . . . . . . . . . . . . . . . . . . . 221
14.1 Spatiul operatorilor liniari si continui . . . . . . . . . . 221
14.2 Conjugatul unui operator . . . . . . . . . . . . . . . . 222
15 Puncte extremale . . . . . . . . . . . . . . . . . . . . . . . . . 225
15.1 Submultimi extremale ale unei multimi . . . . . . . . 225
15.2 Puncte extremale ale unei multimi . . . . . . . . . . . 226

8 CUPRINS

Capitolul 1
Clase de functii
In proiectarea si analizarea diferitilor algoritmi din analiza nu-merica intervin diferite clase de functii. Pentru a fi de maximautilitate, o clasa B trebuie sa posede cel putin urmatoareleproprietati de baza.
1) Functiile din B trebuie sa fie relativ netede;
2) Functiile din B trebuie sa fie usor de memorat (stocat) simanevrat pe un calculator.
3) Functiile din B trebuie sa fie usor de evaluat pe un calculatorımpreuna cu derivatele si integralele lor.
4) Clasa B trebuie sa fie suficient de larga astfel ca functiilenetede sa poata fi bine aproximate cu elemente din B.
Cerem proprietatea 1) deoarece functiile ce apar din proceselefizice sınt ın mod obisnuit netede. Proprietatile 2) si 3) sıntimportante deoarece cele mai multe probleme nu pot fi rezolvatefara ajutorul calculatorului. In final, proprietatea 4) este esentialadaca vrem sa obtinem o buna aproximare. Vom indica ın cele ceurmeaza asemenea clase de functii.
9

10 Capitolul 1. Clase de functii ın teoria aproximarii
1 Clasa functiilor polinomiale
Vom ıncepe sa analizam clasele de functii care intervin ın teoria aproxima-rii prin clasa functiilor polinomiale. Polinoamele au jucat un rol central ınteoria aproximarii si-n analiza numerica. Pentru a vedea de ce polinoamelese bucura de asa o trecere ın teoria aproximarii le vom da cıteva proprietatide baza.
1.1 Polinoame algebrice
In continuare vom fi interesati de spatiul
Pm = p(x) =m∑
i=0
cixi, c0, c1, . . . , cm ∈ R
a functiilor polinomiale de ordin m cu coeficienti reali. Incepem prin aarata ca Pm este un spatiu finit dimensional cu o baza convenabila.
Propozitia 1.1 Spatiul Pm este un subspatiu din C∞(R). Mai mult, pentruorice numar real a, functiile 1, x − a, . . . .(x − a)m formeaza o baza pentruPm.
Demonstratie. Este clar, din definitie, ca orice p ∈ Pm este infinit derivabilpe R. Deoarece αp + βq ∈ Pm pentru orice p, q ∈ Pm si orice α, β ∈ R,rezulta ca Pm un subspatiu vectorial din C∞(R). Deoarece, fiecare functie,1, (x − a), . . . , (x − a)m este, clar, din Pm, a arata ca formeaza o baza estenevoie, numai, sa aratam ca sınt liniar independente. Presupunem p(x) =∑m
i=0 ci(x − a)i ≡ 0. Atunci pentru orice b, toate derivatele lui p trebuie sase anuleze ın b; adica,
p(b)p′(b)...p(m)(b)
=
1 b− a (b− a)2 · · · (b− a)m
0 1 2(b− a) · · · m(b− a)m−1
......
......
0 0 0 · · · m!
·
c0
c1...cm
=
00...0
Acesta este un sistem omogen de (m + 1) ecuatii cu (m + 1)- necunoscute acarei matrice asociata este nesingulara, si prin urmare c0 = c1 = . . . = cm =0. 2

§1. Clasa functiilor polinomiale 11
Semnificatia practica a Propozitiei 1.1 consta ın faptul ca avınd aleasa obaza pentru Pm, fiecare polinom va avea un set unic de coeficienti asociati.Aceasta stabileste formal faptul ca polinoamele pot fi memorate pe un cal-culator. Urmatorul, binecunoscut, algoritm arata ca orice polinom poateusor fi evaluat, si deci ca Pm satisface proprietatile (3) si (4) cerute pentrucalculabilitatea pe un calculator.
Pentru calculul p(x) =∑m
i=0 ci(x− a)i se foloseste urmatorul algoritm.
Algoritm (Schema lui Horner ).
1. u ← x− a
2. p ← cm
3. Pentru i ← m− 1 cu pasul −1 calculeaza p ← u ∗ p + ci
Faptul ca valoarea finala a lui p va fi p(x) rezulta din observatia ca p(x)poate fi scris si ın forma
p(x) = c0 + uc1 + u[c2 + · · ·+ u(cm)]
Este clar ca algoritmul necesita doar m ınmultiri si (m + 1) adunari si/sauscaderi.
Rezulta, din definitie, ca derivatele si primitivele unui polinom sınt din nouun polinom. In particular, daca
p(x) =m∑
i=0
ci(x− a)i,
atunci
Dp(x) = p′(x) =m−1∑
i=0
(i + 1)ci+1(x− a)i
ın timp ce
D−1a p(x) =
∫ x
ap(x)dt =
m+1∑
i=1
ci−1
i(x− a)i
Coeficientii lui Dp si D−1a p sınt usor de calculat din coeficientii lui p. Odata
acesti coeficienti obtinuti putem evalua Dp si D−1a p ın orice punct dat x prin
schema lui Horner.

12 Capitolul 1. Clase de functii ın teoria aproximarii
Putere de aproximare a polinoamelor
In ciuda simlitatii lor, folosind polinoamele algebrice putem obtine o bunaaproximare a functiilor continue pe un compact.
Teorema 1.1 (Weierstrass) . Pentru orice functie f continua pe [a, b] sipentru orice ε > 0 exista un polinom p astfel ca
|f(x)− p(x)| < ε ∀ x ∈ [a, b]
Cu alte cuvinte multimea polinoamelor cu coeficienti reali, P, este densa ınspatiul C([a, b]) cu norma uniforma.
Demonstratie. Deoarece de la intervalul [a, b] se poate trece la intervalul[0, 1] prin transformarea
t =x− a
b− a
si deoarece prin aceasta transformare calitatea de polinom se pastreaza,rezulta ca este suficient sa demonstram teorema pentru intervalul [0, 1].
Notam cu Bn polinomul Bernstein asociat functiei f prin
Bn(x) =n∑
m=0
f(m/n)Cmn xm(1− x)n−m.
Pentru orice ε > 0, deoarece f este uniform continua, exista δ > 0 astfel ca|f(x′) − f(x′′)| < ε/2 cınd |x′ − x′′| < δ. Dar, pentru orice n natural avemevaluarea
|Bn(x)− f(x)| ≤n∑
k=0
|f(k/n)− f(x)|Cknxk(1− x)n−k = S1 + S2
unde ın S1 am ales termeni din suma din dreapta pentru care |x− k/n| < δiar ın S2 termenii din aceiasi suma pentru care |x− k/n| ≥ δ. Tinınd seamaca 1 =
∑nk=0 Ck
nxk(1− x)n−k, din cele de mai sus, obtinem S1 ≤ ε/2 si
S2 ≤ 2Mn∑
k=0
(x− k/n)2
δ2Ck
nxk(1− x)n−k =
=2M
δ2
[x2 − 2x
n
n∑
k=0
kCknxk(1− x)n−k +
1n2
n∑
k=0
k2Cknxk(1− x)n−k
]

§1. Clasa functiilor polinomiale 13
unde M = supy∈[0,1] |f(y)|.Pentru a evalua sumele ramase consideram expresia evidenta
(x + y)n =n∑
k=0
Cknxkyn−k (1.1)
pe care o derivam ın raport cu x, ınmultim cu x si obtinem
nx(x + y)n−1 =n∑
k=0
kCknxkyn−k (1.2)
Repetınd operatia ın (1.2) rezulta
n(n− 1)x2(x + y)n−2 + nx(x + y)n−1 =n∑
k=0
k2Cknxkyn−k (1.3)
Luınd y = 1−x ın (1.1), (1.2) si (1.3) si ınlocuind sumele obtinute ın evaluarelui S2 rezulta
S2 ≤ 2M
δ2
[x2 − 2x2 +
n(n− 1)x2 + nx
n2
]=
Mx(1− x)2nδ2
≤ M
2nδ2
deoarece x(1− x) ≤ 1/4 cınd x ∈ [0, 1]. Pentru n >M
εδ2obtinem
supx∈[0,1]
|f(x)−Bn(x)| ≤ ε
2+
M
δ22Mεδ2 = ε
si cu aceasta teorema este demonstrata. 2
Comentarii bibliografice. Exista numeroase demonstratii ale teoremeide mai sus. Weierstrass demonstreaza teorema ın 1885 facınd apel la teoriafunctiilor analitice. Demonstratiile lui E. Picard 1891, V. Volterra 1897,M. Lerch, 1903, fac apel la dezvoltari ın serie Fourier. Alte demonstratiicu caracter elementar au fost date de C. Runge 1885, H. Lebesque 1898,G. Mittag-Leffler 1900, H. Kuhn 1964. Demonstratia pe care au expus-omai sus este data de Bernstein 1912. In [17] se gasesc demonstratiile lui H.Lebesgue, Landau, iar ın [66] se gaseste data demonstratia lui Kuhn.
Teorema lui Weierstrass revine la a spune ca sistemul (fn)n∈N definit prinfn(x) = xn este fundamental ın C([a, b]), ın sensul ca orice element

14 Capitolul 1. Clase de functii ın teoria aproximarii
f ∈ C([a, b]) poate fi aproximat suficient de bine cu o combinatie liniarafinita de fn. 2
Teorema urmatoare datorata lui Muntz [1914] precizeaza, putin, aceastaproprietate.
Teorema 1.2 O conditie necesara si suficienta pentru ca sistemul
fn(x) = xλn,
( unde λn este un sir crescator de numere reale pozitive ), sa fie funda-mental ın C([0, 1]) este ca
(i) λ0 = 0 (ii) seria∞∑
i=1
λ−1i sa fie divergenta.
O alta generalizare, foarte importanta, a teoremei lui Weierstrass a fostobtinuta de M. H. Stone [1948].
Teorema 1.3 (Stone-Weierstrass) Daca S este un spatiu topologic com-pact, A ⊂ C(S) o subalgebra de functii continue care separa punctele luiS (adica pentru orice cuplu s1, s2 ∈ S, s1 6= s2 exista a ∈ A astfel caa(s1) 6= a(s2)) atunci A ( aderenta lui A ın C((S)) este fie C(S), fiemultimea functiilor continue care se anuleaza ıntr-un punct determinant dinS. Daca A contine functiile constante atunci A = C(S).
Din teorema Stone - Weierstrass putem deduce diverse rezultate importantesi ın primul rınd teorema Weierstrass sau generalizarea sa ın Rn.
Teorema 1.4 Fie S o multime compacta din Rn si P multimea polinoamelorın (x1, · · · , xn). ( P este format din multimea combinatiilor liniare finite deforma xα (xα = xα1
1 · · ·xαnn ) unde αi sınt ıntregi nenegativi ). Atunci P
este un subspatiu dens ın C(S).
Demonstratie. Multimea P formeaza o subalgebra de functii continue peS. Este evident ca P separa punctele lui S : daca s1 = (x1,1, . . . , x1,n) sis2 = (x2,1, . . . , x2,n), s1 6= s2, avem, pentru cel putin un indice i0 : x1,i0 6=x2,i0 . Luam atunci p ∈ P astfel ca p(s) = xi0 (pentru s = (x1, · · · , xn). Estesuficient acum sa aplicam teorema Stone-Weierstrass. 2
Dam ınca un exemplu de aplicare a teoremei lui Stone.

§1. Clasa functiilor polinomiale 15
Propozitia 1.2 Fie ϕ o functie continua strict crescatoare pe [0, 1]. Notamcu ϕi functia definita prin ϕi(x) = (ϕ(x))i si cu Φ multimea ”polinoamelor”p de forma
p(x) =n∑
i=0
αiϕi(x)
cu n ıntreg oarecare (ne fixat ). Atunci Φ este densa ın C([0, 1]).
Demonstratie. Multimea Φ formeaza o subalgebra a lui C[0, 1]). Pentrux1, x2 ∈ [0, 1], x1 6= x2 avem ϕ(x1) 6= ϕ(x2). Cum ϕ0 ≡ 1, aplicınd teoremaStone-Weirstrass obtinem Φ = C([0, 1]). 2
1.2 Polinoame ortogonale
In teoria aproximarii functiilor de o variabila reala sau complexa se folos-esc baze de polinoame ortogonale. O functia w, definita, continua si strictpozitiva pe un interval (a, b) ⊂ R avınd proprietatea ca xnw ∈ L1(a, b)pentru orice n ∈ N se numeste functie pondere pe intervalul (a, b).
Daca w este o functie pondere pe (a, b) atunci spatiul
E = L1w(a, b) = f : (a, b)−→R; f
√w ∈ L2(a, b)
ınzestrat cu produsul scalar (·, ·) definit prin
(f, g) =∫ b
aw(x)f(x)g(x)dx
si cu norma ‖ · ‖ generata de (·, ·) este un spatiu hilbertian.
Teorema 1.5 Daca w este o functie pondere pe (a, b) atunci:
1) Exista un sir (pn)n≥0 de polinoame si numai unul asa ıncıt pentruorice n ∈ N polinomul pn are gradul n, coeficientul lui xn este 1 si(pn, q) = 0 pentru orice polinom de grad ≤ n− 1.
2) Polinoamele sirului (pn) verifica urmatoarea relatie de recurenta
pn(x) = (x− λn)pn−1(x)− µnpn−2(x) (1.4)
unde µn = ‖pn−1‖2/‖pn−2‖2 si λn = (xpn−1, pn−1)/‖pn−1‖2

16 Capitolul 1. Clase de functii ın teoria aproximarii
Demonstratie. Utilizınd procedeul de ortogonalizare Gram-Schmidt pentrubaza canonica 1, x, x2, · · · , xn, · · · de polinoame cu o variabila obtinem
p0(x) = 1, p1(x) = x− (p0, x)/(p0, p0)
...
pn(x) = xn −n−1∑
i=0
λi,npi(x)
cu λi,n = (xn, pi)/(pi, pi).
Polinoamele p0, p1, · · · , pn formeaza o baza pentru Pn, spatiul polinoameloravınd gradul ≤ n, ele sınt ortogonale doua cıte doua. Este usor de vazut capolinoamele definite mai sus verifica
(pn, q) = 0 ∀ q ∈ Pn−1
si ca sirul de polinoame avınd proprietatea de mai sus este unic.
2) Polinomul pn − xpn−1 apartine spatiului Pn−1 si se scrie sub forma
pn − xpn−1 =n−1∑
i=0
αipi.
Luınd produsul scalar al acestei egalitati cu pi obtinem pentru i = 0, 1, · · · ,(n− 1) relatiile
αi(pi, pi) = −(xpn−1, pi) = −(pn−1, xpi).
Polinomul xpi avınd gradul i + 1 obtinem
αi(pi, pi) = 0 daca i ≤ n− 3;αn−1(pn−1, pn−1) = −(xpn−1, pn−1), de unde αn−1 = −λn;αn−2(pn−2, pn−2) = −(pn−1, xpn−2) == (−pn−1, pn−1) + (pn−1, pn−1 − xpn−2) = −(pn−1, pn−1)
deoarece xpn−2 − pn−1 ∈ Pn−2, deci αn−2 = −µn 2
Daca pn = pn/‖pn‖ atunci sirul p0, p1, p2, . . . , pn, . . . formeaza o baza ortonor-mata a spatiului (E, ‖ · ‖).Polinoamele pn (resp. pn) se numesc polinoame ortogonale (resp. polinoameortonormate ) pe (a, b) cu functia pondere w.

§1. Clasa functiilor polinomiale 17
Remarca 1.1
• Daca pnn≥0 este un sir de polinoame ortogonale iar ann≥0 este unsir de numere reale nenule atunci si anpnn≥0 este un sir de polinoameortogonale.
• Daca qnn≥0 este un sir de polinoame ortogonale atunci exista un sirde numere reale nenule astfel ca anqnn≥0 este identic cu sirul obtinutın Teorema 1.5
Teorema 1.6 Daca n ≥ 1 polinomul pn, din sirul p0, p1, . . ., are n radacinireale si distincte ın intervalul (a, b).
Demonstratie. Notam prin x1, x2, . . . xk radacinile reale de multiplicitateimpara apartinınd intervalului (a, b) pentru polinomul pn. Daca k = n teo-rema este demonstrata. Presupunem ın continuare k < n si luam q(x) = 1daca k = 0 si q(x) = (x − x1) · · · (x − xk) altfel. Din proprietatea de orto-
gonalitate a lui pn pe Pn−1 obtinem∫ b
apn(x)q(x)w(x)dx = 0. Dar polinomul
pnq avınd radacini de multiplicitate para pastreaz un semn constant pe (a, b).Cum w(x) > 0 pe (a, b) deducem pn(x)q(x) = 0 pentru orice x ∈ (a, b), deunde pn(x) = 0, ceea ce este ın contradictie cu faptul ca gradul polinomuluipn este n. 2
Teorema 1.7 Daca ponderea w verifica relatiile:
w′/w = α/β, (wβ)(a) = (wβ)(b) = 0 (1.5)
unde α si β sınt polinoame cu coeficienti reali de grad cel mult unu, respectivdoi, dar nu avem simultan gradul lui α mai mic ca unu si gradul lui β maimic ca doi, atunci:
• exista o constanta an astfel ca
pn = anw−1(wβn)(n) (formula lui Rodriques) , (1.6)
• polinomul pn verifica ecuatia
βy′′ + (α + β′)y′ − n(α′ +
n + 12
β′′)y = 0 (1.7)

18 Capitolul 1. Clase de functii ın teoria aproximarii
Demonstratie.
1) Printr-o derivare se obtine
(wβn)(n) = (w′βn + nwβn−1β′)(n−1) = (wβn−1Rn,1)(n−1)
unde Rn,1 = α + nβ′ si am folosit faptul ca w′β = αw. Prin inductie sepoate demonstra relatia
(wβn)(n) = (wβn−kRn,k)(n−k) (1.8)
unde Rn,k este un polinom avınd gradul k si ın plus
Rn,k = [α + (n− k + 1)β′]Rn,k−1 + βR′n,k−1
Din relatia (1.8) se obtine (wβn)(n) = w ·Rn,n ceea ce arata ca w−1(wβn)(n)
este un polinom avınd gradul n. Pentru a arata ca acest polinom este liniardependent de pn vom arata ca (xk, w−1(wβn)(n))w = 0 , k = 0, 1, · · · , n − 1si vom folosi Teorema 1.5. Dar
(xk, w−1(wβn)(n)) =∫ b
axk(wβn)(n)dx =
= (wβn)(n−1)xk|ba − k
∫ b
axk−1(wβn)(n−1)dx = · · · =
= (−1)kk!∫ b
a(wβn)(n−k)dx = 0,
deci pn = anw−1(wβn)(n) .
2) Notınd un = wβn, deoarece u′n = wβn−1(α + nβ′) va rezulta egalitateaβu′n = (α + nβ′)un care derivata de n + 1 ori conduce la identitatea
β(u(n)n )′′ + (β′ − α)(u(n)
n )′ − 12(n + 1)(2α′ − nβ′′)u(n)
n = 0.
Intr-adevar,
(βu′n)(n+1) = βu(n+2)n + (n + 1)β′u(n+1)
n +n(n + 1)
2β′′u(n)
((α + nβ′)un)(n+1) = (α + nβ′)u(n+1)n + (n + 1)(α′ + nβ′′)u(n)
n
si notınd V = u(n)n , rezulta ca V verifica ecuatia
βV ′′ + (β′ − α)V ′ − (n + 1)(α′ +n
2β′′)V = 0

§1. Clasa functiilor polinomiale 19
Impartind relatia de mai sus cu w si grupınd termenii, obtinem
(β
wV ′)′ − (n + 1)(α′ +
n
2β′′)
V
w= 0
Inlocuind w−1V , prin y iar w−1βV ′ prin y′β + αy obtinem
y′′β + (α + β′)y′ + α′y − nα′y − α′y − n(n + 1)2
β′′y = 0
deciβy′′ + (β′ + α)y′ − n(α′ +
n + 12
β′′)y = 0
Dary = w−1V = w−1u(n)
n = w−1(wβn)(n),
deci pn verifica ecuatia (1.7). 2
Teorema 1.8 Daca intervalul (a, b) este finit sau daca nu este finit darexista M si β > 0 asa ıncıt |w(x)| ≤ M exp(−β‖x‖) pentru orice x ∈ (a, b)atunci sirul (pn)n≥0 este ortogonal si complet ın (E, ‖ · ‖).
Demonstratie. Cum multimea C([a, b]) ∩ E este densa ın (E, ‖ · ‖) estesuficient sa demonstram teorema, de mai sus, pentru functii continue din E.
1) Pentru orice f ∈ E functie continua pe [a, b] si pentru orice ε > 0, conformteoremei lui Weierstrass, exista un polinom Rn de grad n astfel ıncıt
|f(x)−Rn(x)| ≤ ε(∫ b
aw(t)dt
)− 12 , ∀x ∈ (a, b),
deci
‖f −Rn‖2w =
∫ b
aw(x)|f(x)−Rn(x)|2dx < ε2
(∫ b
aw(t)dt
)−1∫ b
aw(x)dx = ε2
de unde ‖f − Rn‖w < ε. Cum Rn este un polinom de gradul n existaα0, α1, . . . , αn astfel ca Rn = α0p0 + · · ·αnpn deci
||α0p0 + · · ·+ αnpn − f ||w < ε.
2) Functia h : R−→R definita prin
h(x) =
√w(x) x ∈ (a, b)
0 x 6∈ (a, b)

20 Capitolul 1. Clase de functii ın teoria aproximarii
este masurabila pe R si exista M > 0 si β > 0 astfel ca
|h(x)| ≤ Me−β‖x‖ ∀x ∈ R.
Cum h este nenula a.p.t. ın (a, b) rezulta, folosind un rezultat standardde analiza matematica, ca sirul (hxn) este complet ın L2(a, b) , deci sirul(√
wxn)n≥0 este complet ın L2(a, b) , de unde rezulta ca sirul (√
wxn) estetotal ın L2(a, b) .
Sa demonstram acum ca sirul (pn) este total ın (E, ‖ ‖). Pentru f din E,
avem∫ b
aw(x)|f(x)|2dx < +∞ , deci functia g =
√w · f este ın L2(a, b) si
folosind rezultatul ce tocmai a fost demonstrat, rezulta ca exista a1, a2, . . . , an
in R astfel ca
‖g −n∑
j=0
aj
√wxj‖2 < ε
de unde obtinem
‖f −n∑
j=0
ajxj‖2
w =∫ b
aw(x)(f(x)−
n∑
j=0
ajxj)2dx =
∫ b
a(√
w(x)f(x)−n∑
j=0
aj
√w(x) xj)2dx = ‖g −
n∑
j=0
aj
√wxj‖2
2 < ε2
deci
||f −n∑
j=0
ajxj‖w < ε
Cum P =∑n
j=0 ajxj este un polinom avınd gradul n, exista β0, β1, . . . , βn
astfel ca P =∑n
i=0 βipi, deci
‖f −n∑
j=0
βjpj‖ < ε
ceea ce demonstreaza ca sirul pjj∈N construit ın Teorema 1.5 este completın (E, || ||). 2
Teorema 1.9 (proprietatea de minim a polinoamelor ortogonale)
Dintre toate polinoamele avınd gradul n de forma
p(x) = xn + αn−1xn−1 + · · ·+ α0

§1. Clasa functiilor polinomiale 21
cel care realizeaza minimul functionalei F definita prin
F(p) =∫ b
ap(x)2w(x)dx
este polinomul pn din sirul ortogonal p0, p1, . . . ın raport cu ponderea w.
Demonstratie. Cum p0, . . . , pn este o baza pentru Pn rezulta ca pentruorice polinom de forma p(x) = xn + αn−1x
n−1 + · · ·+ α0 exista constantelec0, . . . , cn−1 astfel ca p = pn + cn−1pn−1 + · · ·+ c0p0. Tinınd seama de faptulca F(q) = ‖q‖2 si ca (pi, pj) = 0 daca i 6= j, luınd cn = 1 obtinem
F(p) = ‖p‖2 = (p, p) =( n∑
i=0
cipi,n∑
j=0
cjpj
)=
=n∑
i,j=0
cicj(pi, pj) =n∑
i=0
c2i (pi, pi) = F(pn) +
n−1∑
i=0
c2iF(pi)
de unde rezulta ca F(pn) ≤ F(p) pentru orice polinom avınd gradul n sicoeficientul lui xn egal cu 1. 2
Exemple de polinoame ortogonale
Cıteva clase de polinoame ortogonale, mai des utilizate, vor fi listate ın celece urmeaza.
Polinoamele Legendre
Pentru (a, b) = (−1, 1) si w(x) = 1 se obtin polinoamele ortogonale pn cesınt de forma
pn(x) =n!
(2n).
Sirul Pn cu Pn = Anpn unde An = 1/pn(1) formeaza sirul polinoamelorLegendre.
Polinomul Pn verifica ecuatia diferentiala
(1− x2)y′′ − 2xy′ + n(n + 1)y = 0.

22 Capitolul 1. Clase de functii ın teoria aproximarii
Sirul polinoamelor Legendre (Pn)n≥0 este complet ın L2(−1, 1). PolinoamelorLegendre le atasam functiile Legendre (Pn,m) definite prin
Pn,m(x) = (1− x2)m/2(Pn(x))(m).
Observam ca daca m > n atunci functiile Legendre asociate sınt identic nule.Functiile Legendre asociate (Pn,m) verifica pe (−1, 1) ecuatia
(1− x2)y′′ − 2xy′ +
(n(n + 1)− m2
1− x2
)y = 0
Pentru orice m ∈ Z sirul (Pn,m)n≥1 este ortogonal si complet ın L2(−1, 1).
Polinoamele Cebısev
Daca pe (−1, 1) consideram ponderea w(x) = 1/√
1− x2 se obtin poli-noamele Cebısev de prima speta iar daca w(x) =
√1− x2 se obtin poli-
noamele Cebısev de speta a doua. Usor se arata ca
pn(x) = 21−n cos(n arccosx)
si verifica ecuatia diferentiala
y′′ + ny = 0.
Sirul polinoamelor Cebısev este complet ın L2w(−1, 1).
Considerınd functionala F (p) = max−1≤x≤1 |p(x)| atunci dintre toate poli-noamele de grad n care au coeficientul lui xn egal cu unitatea polinoameleCebısev sınt cele care realizeaza minimul functionalei F.
Polinoamele Laguerre
Pentru (a, b) = (0,∞) si w(x) = e−xxλ polinoamele ortogonale pn no-tate (Lλ
n)n≥0 se numesc polinoame Laguerre. Polinoamele Laguerre inter-vin ın studiul multor probleme ale fizicii matematice, de exemplu ın inte-grarea ecuatiei lui Helmholtz ın coordonate parabolice, ın teoria propagariioscilatiilor electromagnetice ın lungul liniilor de transmisie, etc...
Lunınd α(x) = λ − x, β(x) = x, cınd λ > −1 functia pondere w verificaecuatia (1.5). Polinomul Laquerre Lλ
n de gradul n are forma
Lλn(x) = (−1)nexx−λ(e−xxn+λ)(n)

§1. Clasa functiilor polinomiale 23
verifica ecuatia diferentiala
xy′′ + (λ + 1− x)y′ + ny = 0.
Sirul polinoamelor Laguerre este complet in E = L2w(0,∞). Functiile
ϕλn(x) = x
λ2 e−
x2 Lλ
n(x), n ≥ 0, λ ≥ 0
sınt functiile Laguerre asociate polinoamelor Laguerre. Aceste functii auunele proprietati importante ca de exemplu: sınt finite ın origine si nule la+∞; formeaza un sir ortogonal si complet ın L2(0,∞).
Polinoame Hermite
Pentru (a, b) = (−∞, +∞) iar w(x) = e−x2se obtin polinoamele Hermite ce
au formaHn(x) = (−1)n2−nex2
(e−x2)(n)
Functia pondere w verifica ecuatia (1.5) luınd α(x) = −2x, β(x) = 1. Poli-noamele Hermite Hn verifica ecuatia diferentiala
y′′ − 2xy′ + 2ny = 0.
Sirul (Hn)n≥0 este complet ın E = L2w(R). Functiile Hn(x) = e−
x2
2 Hn(x) senumesc functii Hermite asociate polinoamelor Hermite iar sirul (Hn)n esteortogonal si complet in L2(R).
1.3 Polinoame trigonometrice
In aproximarea functiilor periodice un rol central ıl joaca polinoamele trigono-metrice. Un polinom trigonometric de ordinul n si de perioada 2π are forma
tn(x) = a0 +n∑
k=1
(ak cos kx + bk sin kx)
unde a0, a1, · · · , an, b1, · · · , bn sınt numere reale. In cele ce urmeaza vom notacu T2π, multimea polinoamelor trigonometrice.
Propozitia 1.3 Multimea T2π a polinoamelor trigonometrice de perioada2π formeaza o subalgebra ın multimea functiilor reale continue.

24 Capitolul 1. Clase de functii ın teoria aproximarii
Demonstratie. Evident suma a doua polinoame trigonometrice si ınmulti-rea unui scalar cu un polinom trigonometric este tot un polinom trigonome-tric. Trebuie sa mai aratam ca produsul a doua polinoame trigonometriceeste un polinom trigonometric. Fie t1 si t2 doua polinoame trigonometrice
t1(x) = a′0 +n∑
k=1
(a′k cos kx + b′k sin kx)
t2(x) = a′′0 +m∑
j=1
(a′′j cos jx + b′′j sin jx)
doua polinoame trigonometrice. Produsul t1(x)t2(x) cuprinde termeni deurmatoarearele trei tipuri:
a′ka′′j cos kx cos jx, a′kb
′′j coskx sin jx, b′kb
′′j sin kx sin jx.
Insacos kx cos jx =
cos(k + j)x + cos(k − j)x2
sin kx cos jx =sin(k + j)x + sin(k − j)x
2
sin kx sin jx =cos(k + j)x− cos(j − k)x
2deci t1(x)t2(x) se reduce la o suma finita de cosinusuri si sinusuri din multipliıntregi ai lui x, fiecare cosinus si sinus putınd fi afectat de un coeficientnumeric. Asadar, produsul t1(x)t2(x) este un polinom trigonometric. 2
Tinınd seama de faptul ca∑n
k=−n αkeikx este un polinom trigonometric daca
si numai daca α−k = αk pentru orice ıntreg pozitiv ≤ n obtinem ca pentruorice polinom trigonometric de ordinul n exista un polinom algebric.
Propozitia 1.4
1) Pentru orice polinom trigonometric t de ordin n exista un polinomalgebric, q, de grad cel mult 2n astfel ca
t(x) = e−inxq(eix) x ∈ R
2) Daca q este un polinom de grad 2n de forma q(x) =∑2n
k=0 αkxk cu
proprietatea ca an−k = an+k pentru k ∈ 0, . . . , n atunci
t(x) = e−inxq(eix), ∀ x ∈ R
este un polinom trigonometric.

§1. Clasa functiilor polinomiale 25
Demonstratie. 1) Daca polinomul trigonometric t are forma
t(x) = a0 +n∑
k=1
(ak cos kx + bk sin kx)
utilizınd formulele lui Euler eix = cosx + i sinx, e−ix = cosx − i sinxobtinem
t(x) = a0 +n∑
k=1
ak − ibk
2eikx +
ak + ibk
2e−ikx =
= e−inx( n∑
k=1
ak + ibk
2ei(n−k)x + a0e
inx +n∑
k=1
ak − ibk
2ei(n+k)x
)=
= e−inx2n∑
k=0
αkeikx = e−inxq(eix)
unde
αk =
an−k + ibn−k
2pentru k ∈ 0, . . . , n
an+k − ibn+k
2pentru k ∈ n + 1, . . . , 2n
si
q(x) =2n∑
k=0
αkxk.
2) Daca polinomul q(x) =∑2n
k=0 αkxk de grad cel mult 2n are proprietatea
ca αn+α = αn−k pentru k ∈ 0, . . . , n atunci t(x) = e−inxq(eix) este unpolinom trigonometric de ordin n. 2
Puterea de aproximare a polinoamelor trigonometrice
Vom demonstra, acum, un rezultat de aproximare a functiilor periodice con-tinue prin polinoame trigonometrice.
Teorema 1.10 Daca f este o functie continua, periodica, de perioada 2πpe (−∞,+∞) atunci pentru orice ε > 0 exista un polinom trigonometric tde perioada 2π astfel ıncıt
|f(x)− t(x)| < ε ∀ x ∈ R.

26 Capitolul 1. Clase de functii ın teoria aproximarii
Pentru demonstrarea acestei teoreme vom arata mai ıntıi rezultatul urmator.
Lema 1.1 Daca f este o functie continua si para, definita pe [−π, π] atuncipentru orice ε > 0 exista un polinom algebric P , astfel ıncıt
|f(x)− P (cosx)| < ε ∀ x ∈ [−π, π].
Demonstratie. Sa punem, pentru −1 ≤ t ≤ 1
ϕ(t) = f(arccos t) (1.9)
lucru posibil deoarece valorile functiei t → arccos t, sınt situate ın intervalul[0, π]. Functia ϕ, ca suprapunere a doua functii continue, este continuape [−1, 1]. Conform teoremei lui Weierstrass, de aproximare a functiilorcontinue prin polinoame, exista un polinom P astfel ıncıt
|ϕ(t)− P (t)| < ε ∀ t ∈ [−1, 1]. (1.10)
Punınd x = arccos t si tinınd seama de (1.9) si (1.10), rezulta
|f(x)− P (cosx)| < ε ∀ x ∈ [0, π]. (1.11)
Insa cos este o functie para, deci x → P (cosx) este o functie para. Deoarecef este para, prin ipoteza, rezulta
|f(−x)− P (cos(−x))| = |f(x)− P (cosx)|
pentru orice x ∈ [0, π], deci, punınd u = −x si tinınd seama de (1.11) avem
|f(u)− P (cosu)| < ε ∀u ∈ [−π, 0] (1.12)
deci, tinınd seama de (1.11) si (1.12), avem
|f(x)− P (cosx)| < ε ∀ x ∈ [−π, π].
2
Demonstrarea teoremei 1.10. Sa consideram functiile F si G definitaprin
F (x) = f(x) + f(−x) G(x) = (f(x)− f(−x)) sinx.
Functia F este evident para pe (−∞,∞). Functia G este si ea para pe(−∞,+∞), deoarece este un produs de functii impare. Din faptul ca f este

§1. Clasa functiilor polinomiale 27
periodica, de perioada 2π, rezulta ca F si G sınt de asemenea periodice, deperioada 2π pe (−∞,∞). Putem deci sa aplicam functiilor F si G lema demai sus. Fie ε > 0. Exista doua polinoame algebrice P si Q, astfel ıncıt
|F (x)− P (cosx)| < ε/2, |G(x)−Q(cosx)| < ε/2 ∀ x ∈ (−∞,+∞).
Punındt1(x) = P (cos x) sin2 x + Q(cosx) sinx
si observınd ca
F (x) sin2 x + G(x) sin x = 2f(x) sinx
rezulta|2f(x) sin2 x− t1(x)| < ε ∀ x ∈ (−∞,∞) (1.13)
t1 fiind un polinom trigonometric. Intr-adevar, pentru orice x real
|2f(x) sin2 x− t1(x)| =
|F (x) sin2 x + G(x) sin x− P (cosx) sin2 x−Q(cosx) sinx| ≤
≤ |F (x)− P (cosx)| · | sin2 x|+ |G(x)−Q(cosx)| · | sinx| < ε.
Functia f1(x) = f(x + π/2) este continua si are perioada 2π pe (−∞,∞),deci putem sa-i aplicam acelasi rationament ca pentru f si obtinem ca existaun polinom trigonometric t2 astfel ıncıt
|2f(x + π/2) sin2 x− t2(x)| < ε ∀ x ∈ R. (1.14)
Inlocuind, ın ultima inegalitate, pe x prin x−π/2, obtinem, punınd t3(x) =t2(x− π/2)
|2f(x) sin2(x− π/2)− t3(x)| < ε (1.15)
si deoarece inegalitatea (1.14) este valabila pentru orice x real, rezulta casi inegalitatea (1.15) este adevarata pentru orice x real. Insa (1.15) se maiscrie
|2f(x) cos2 x− t3(x)| < ε (1.16)
Din (1.13) si (1.16) rezulta
|2f(x)− (t1(x) + t3(x)| < 2ε ∀ x ∈ R,

28 Capitolul 1. Clase de functii ın teoria aproximarii
deci, punınd t(x) = (t1(x) + t3(x))/2 obtinem
|f(x)− t(x)| < ε ∀ x ∈ R.
Cum t1 si t3 sınt polinoame trigonometrice, obtinem ca t este un polinomtrigonometric. 2
Corolarul 1.1 Fie f : R −→ R o functie continua, periodica, de perioada2π. Exista un sir de polinoame trigonometrice (tn)n∈N care converg uniform,pe R, catre f.
Demonstratie. Este suficient sa facem, ın Teorema 1.10, pe ε = 1/n si sanotam tn polinomul trigonometric pe care Teorema 1.10 ıl asociaza acestuiε. Obtinem
|f(x)− tn(x)| < 1/n ∀ x ∈ R, ∀ n ∈ N,
de unde convergenta uniforma a sirului tn la f . 2
2 Clasa functiilor spline
O alta clasa importanta de functii care intervine des ın analiza numerica oformeaza clasa functiilor polinomiale pe portiuni.
2.1 Functii polinomiale pe portiuni
Fie [a, b] un interval finit ınchis, si fie ∆n = xini=1 o diviziune a intervalului
[a, b] cua = x1 < x2 < · · · < xn−1 < xn = b.
Multimea ∆n ımparte intervalul [a, b] ın n − 1 subintervale Ii = [xi, xi+1),cınd i = 1, . . . n − 2, si In−1 = [xn−1, xn]. Daca P1, . . . , Pn−1 este un sirde polinoame, fiecare avınd gradul cel mult m, atunci definim o functiepolinomiala pe portiuni f de gradul cel mult m prin
f(x) = Pi(x) daca xi < x < xi+1, i = 1, . . . , n− 1.
Punctele xi se numesc noduri ale functiei f . In punctele interioare functiaf ınca nu este definita. Intr-un sens, o functie polinomiala pe portiuni aredoua valori ın fiecare nod, si anume
f(xi−) = Pi−1(xi) si f(xi+) = Pi(xi).

§2. Clasa functiilor spline 29
Pentru a obtine o functie definita ın toate punctele intervalului [a, b] vomalege functia f ca fiind continua la dreapta, adica f(xi) = f(xi+) pentrui = 2, . . . , n − 1 si continua la stınga ın b. Putem sa consideram functia fdefinita pe tot R considerınd f(x) = P1(x) pentru x ≤ x1 si f(x) = Pn−1(x)pentru x ≥ xn.
Definitia 2.1 Fiind data o diviziune ∆n = (xi)ni=1 a intervalului [a, b] si m
un ıntreg pozitiv vom nota cu PPm(∆n) spatiului functiilor polinomiale peportiuni de grad cel mult m.
Din cele de mai sus rezulta ca f ∈ PPm(∆n) daca si numai daca existaP1, . . . , Pn−1 din Pm astfel ca
f(x) = Pi(x) ∀ x ∈ Ii, i = 1, · · · , n− 1.
Propozitia 2.1 Spatiul PPm(∆n) este un spatiu vectorial finit dimensionalsi dim(PPm(∆n)) = (n− 1)(m + 1).
Demonstratie. Daca B1, . . . , Bm+1 este o baza pentru Pm atunci functiile(ϕij)
m+1,n−1i=1,j=1 definite prin
ϕij(x) =
Bi(x) daca x ∈ Ij
0 ın rest
formeaza o baza pentru PPm(∆n). Deci dimensiunea spatiului PPm(∆n)este (n− 1)(m + 1). 2
Vom considera derivata de ordin j a unei functii din PPm(∆n) ca fiind ofunctie polinomiala pe portiuni de ordin m − j avınd aceleasi noduri cafunctia f .
O functie polinomiala pe portiuni poate fi reprezentata ıntr-un calculatorıntr-o varietate de moduri. Daca o asemenea functie f si derivatele sale tre-buie evaluate ın mai multe puncte din [a, b] (de exemplu, pentru reprezentaregrafica ), atunci urmatoare reprezentare pare sa fie cea mai comoda si maieficienta.
Pentru o functie f ∈ PPm(∆n) se dau
i) ıntregii m si n, ce reprezinta, gradul polinoamelor si respectiv numarulde puncte ale diviziunii ∆n.

30 Capitolul 1. Clase de functii ın teoria aproximarii
ii) o secventa strict crescatoare de puncte ce formeaza diviziunea∆n (a = x1 < x2 < . . . < xn−1 < xn = b).
iii) matricea C = (cji)m n−1j=0,i=1 a derivatelor la dreapta ın noduri, adica
cji = f (j)(xi+) j = 0, . . . , m, i = 1, . . . , n− 1
Deci f ımpreuna cu derivatele sale pot fi evaluate ın orice punct x din [a, b]prin
f (j)(x) =m−j∑
k=0
ck,i(x− xi)k
k!
unde (prin conventie ) i este un ıntreg definit prin: i = 1 si x < x1, i ∈1, . . . , n− 2 daca xi ≤ x < xi+1, si i = n− 1 daca x ≥ xn−1.
2.2 Functii spline polinomiale
In clasa functiilor polinomiale pe portiuni alegem subclase de functii care ınnodurile diviziunii sa aiba anumite proprietati de regularitate.
Definitia 2.2 O functie s : [a, b]−→R se numeste functie spline poli-nomiala de gradul m, relativ la diviziunea ∆n = (xi)n
i=1, daca satisfaceurmatoarele doua conditii:
1) s ∈ Cm−1([a, b]) ; 2) s|(xi,xi+1) ∈ Pm, i = 1, . . . , n− 1
Vom nota cu Sm(∆n) multimea functiilor spline polinomiale de gradul msau echivalent de ordinul m + 1, relativ la diviziunea ∆n.
O functie s ∈ Sm(∆n) daca si numai daca s ∈ Cm−1([a, b]) si s ∈ PPm(∆n),cu alte cuvinte
Sm(∆n) = PPm(∆n) ∩ Cm−1([a, b]).
Orice element din Sm(∆n) se va numi, ın continuare, functie spline de gradm sau echivalent functii spline de ordinul m + 1.
Teorema 2.1 Orice element s ∈ Sm(∆n) se reprezinta ın mod unic subforma
s(x) =m∑
i=0
ai(x− x1)i +n−1∑
p=2
cp(x− xp)m+ (2.1)
unde (x− xp)m+ = (max0, x− xp)m.

§2. Clasa functiilor spline 31
Demonstratie. Fie s ∈ Sm(∆n). Deoarece s |[x1,x2)∈ Pm atunci s(x) =∑mp=0 ap(x − x1)p = Pm(x) pentru orice x ∈ [x1, x2). Cum s |[x2,x3)∈ Pm
luam s(x) = Qm(x), x ∈ [x2, x3). Polinomul Qm se poate reprezenta ınmod unic sub forma
Qm(x) = Pm(x) +m∑
r=0
α2,r(x− x2)r (2.2)
Tinınd cont de conditiile din definitia spatiului Sm(∆n) cerem ca functia qdefinita prin
q(x) =
Pm(x) daca x ∈ [x1, x2)
Qm(x) daca x ∈ [x2, x3)
sa fie de clasa Cm−1(x1, x3). Pentru aceasta trebuie ca
P (j)m (x2) = Q(j)
m (x2) pentru orice j = 0, . . . , m− 1 (2.3)
Tinınd cont de (2.2), conditiile (2.3) conduc la: α2,r = 0 pentru r =0, . . . , m− 1. In consecinta functia
q(x) =
m∑
p=0
ap(x− x1)p, daca x ∈ [x1, x2)
m∑
p=0
ap(x− x1)p + α2,m(x− x2)m, daca x ∈ [x2, x3)
este din Cm−1(x1, x3), iar restrictia la fiecare din intervalele [x1, x2), [x2, x3)este un polinom de gradul m. In sfırsit, sa observam ca functia q se poatescrie
q(x) =m∑
p=0
ap(x− x1)p + c2(x− x2)
m+
pentru orice x ∈ [x1, x3), unde c2 = α2,m. Procedınd analog pentru restulintervalelor se ajunge la concluzia ca
s(x) =m∑
p=0
ap(x− x1)p +n−1∑
p=2
cp(x− xp)m+
satisface conditiile din definitia spatiulul Sm(∆n). Unicitatea formulei dereprezentare (2.1) rezulta, nemijlocit, din faptul ca restrictia lui s la [xi, xi+1)este un polinom. 2

32 Capitolul 1. Clase de functii ın teoria aproximarii
Teorema 2.2 Daca ∆n = xini=1 o diviziune a intervalului [a, b] cu
a = x1 < x2 < . . . < xn = b si m un ıntreg pozitiv, atunci:
1) Spatiul Sm(∆n) este finit dimensional si dim(Sm(∆n)) = n + m− 1
2) Functiile ϕ1, . . . , ϕn+m−1 definite prin ϕi(x) = (x − x1)i−1, 1 ≤ i ≤m + 1; ϕm+p(x) = (x− xp)m
+ , p = 2, . . . , n− 1 formeaza o baza pentruSm(∆n).
Demonstratie. Cum Sm(∆n) este un subspatiu vectorial pentruPPm(∆n), iar PPm(∆n) este finit dimensional rezulta ca Sm(∆n) este finitdimensional. Functiile ϕ1, . . . , ϕn+m−1 sınt din Sm(∆n) si sınt liniar in-dependente. In adevar, presupunem ca exista o combinatie liniara g =∑n+m−1
s=1 asϕs egala cu zero pe [a, b]. Aceasta ınseamna
g(x) =m+1∑
s=1
as(x− x1)s−1 +n−1∑
s=2
am+s(x− xs)m+ = 0 ∀x ∈ [a, b].
In particular: g(x) = 0 pentru x ∈ [x1, x2), ceea ce implica a1 = · · · =am+1 = 0, g(x) = 0 pe [x2, x3) implica αm+2 = 0, g(x) = 0 pe [xi, xi+1)implica αm+i = 0 Deci ϕ1, . . . , ϕn+m−1 este o multime liniar independentadin Sm(∆n) si cum din Teorema 2.1 rezulta ca orice element din Sm(∆n)se reprezinta ın mod unic ın raport cu ϕ1, . . . , ϕn+m−1, rezulta ca sistemulϕ1, . . . , ϕn+m−1 formeaza o baza pentru Sm(∆n). 2
Pentru o mai buna ıntelegere a spatiului Sm(∆n) vom particulariza rezul-tatele de mai sus pentru cazul m = 1 si m = 3.
Functii spline de gradul ıntıi
Luınd ın Definitia 2.2, m = 1, obtinem definitia functiilor spline polinomialede gradul ıntıi. Asadar,
Definitia 2.3 Fie ∆n = xini=1 cu a = x1 < x2 < · · · < xn = b o partitie
a intervalului [a, b] . Se numeste functie spline polinomiala de gradulıntıi asociata partitiei ∆n, functia s : [a, b] → R care satisface urmatoareleconditii:
1) s ∈ C([a, b]) ; 2) s|[xi,xi+1]∈ P1, i = 1, . . . , n− 1
Vom nota, ca de obicei, prin S1(∆n) multimea tuturor functiilor ce satisfacconditiile 1) si 2) din Definitia 2.3.

§2. Clasa functiilor spline 33
Teorema 2.3
1) Orice element s din S1(∆n) se reprezinta ın mod unic sub forma:
s(x) = a0 + a1(x− x1) +n−1∑
i=2
ai(x− xi)+ x ∈ [a, b] (2.4)
unde a0 = s(x1), a1 = s′(x1), ai = s′(xi+)− s′(xi−), i = 2, . . . , n− 1.
2) Functiile 1, x−x1, (x−xi)+, i = 2, · · · , n− 1 constituie o baza pentruS1(∆n) si dim(S1(∆n)) = n.
Demonstratie. Rezultatele de mai sus se obtin prin particularizarea teo-remelor 2.1 si 2.2. 2
O alta baza ( utila ın special ın calculele numerice ) este definita ın teoremaurmatoare.
Teorema 2.4 Functiile H1, . . . , Hn definite prin
H1(x) =
(x2 − x)/(x2 − x1) x ∈ [x1, x2]
0 x ∈ [a, b]\[x1, x2]
Hi(x) =
(x− xi−1)/(xi − xi−1) x ∈ [xi−1, xi]
(xi+1 − x)/(xi+1 − xi) x ∈ [xi, xi+1]
0 x ∈ [a, b]\[xi−1, xi+1]
pentru i = 2, · · · , n− 1 si
Hn(x) =
(x− xn−1)/(xn − xn−1) x ∈ [xn−1, xn]
0 x ∈ [a, b]\[xn−1, xn]
formeaza o baza pentru S1(∆n).
Demonstratie. Se verifica cu usurinta ca Hi ∈ S1(∆n) si ca H1, . . . , Hn
sınt liniar independente (ın particular, relatia Hi(xj) = δij este utila pentruverificarea liniar independentei functiilor Hi ). 2
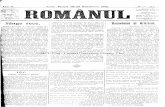
Dam ın continuare graficele functiilor Hi pentru i fixat, 1 ≤ i ≤ n:

34 Capitolul 1. Clase de functii ın teoria aproximarii
x1 = a xn = b
x1 = a xn = b
x2 xn−1
H1 Hn
xi−1 xi xi+1
Hi
Figura 2.1:
Remarca 2.1 Orice element s din S1(∆n), ın baza formata de functiileH1, . . . ,Hn se reprezinta ın mod unic sub forma:
s =n∑
i=1
s(xi) ·Hi. (2.5)
Intr-adevar, functiile Hi formınd o baza pentru S1(∆n) exista sistemul unicde numere a1, . . . , an astfel ıncıt s =
∑ni=1 aiHi. In particular, pentru orice
j = 1, . . . , n, avem s(xj) =∑n
i=1 aiHi(xj) = aj de unde rezulta reprezentarea(2.5). 2
Sa ilustram, pe un exemplu, faptul ca baza formata cu functiile Hi, i =1, . . . , n este o baza utila pentru calcule numerice. Fie f : [1/10, 10] → Rfunctia definita dupa cum urmeaza:
f(x) =
1, 3 x ∈ [1/10, 31/10]⋃
[61/10, 10]1, 1 · (x− 3, 1)/1, 4 + 1, 3 x ∈ [31/10, 45/10]2, 2 · (4, 8− x)/0, 3 + 0, 2 x ∈ [45/10, 48/10]1, 1 · (x− 4, 8)/1, 3 + 0, 2 x ∈ [48/10, 61/10]
a carui grafic este dat ın figura 2.2

§2. Clasa functiilor spline 35
-
6
0.1 3.1 4.5 4.8 6.1 10
Figura 2.2:
Considerınd pe [1/10, 10] diviziunea ∆11 = xi cu
x1 = 0, 1, x2 = 1, 1, x3 = 2, 1, x4 = 3, 1, x5 = 4, 5, x6 = 4, 8,
x7 = 6, 1, x8 = 7, 1, x9 = 8, 1, x10 = 9, 1 x11 = 10.
Functia f ∈ S1(∆11) deci, conform formulei de reprezentare (2.4) se scrie ınorice punct x din [1/10, 10]: astfel :
f(x) = 1, 3 + a4(x− x4)+ + a5(x− x5)+ + a6(x− x6)+ + a7(x− x7)+
unde ai = f ′(xi+) − f ′(xi−), i = 4, 5, 6, 7. Calculınd aj , j = 4, 5, 6, 7 cudoua cifre semnificative obtinem a4 = 0, 79, a5 = −8, 1, a6 = 8, 2, a7 =−0, 85. Evaluınd valoarea lui f ın punctul x = 9, 5 ( unde coeficientii ai
sınt dati mai sus ) obtinem f(9, 5) = 2, 1. Pe de alta parte din definitialui f avem f(9, 5) = 1, 3. Daca ın locul reprezentarii lui f conform (2.4)folosim reprezentarea data de (2.5), tinınd seama de definitia functiilor Hi
avem f(9, 5) =∑11
i=1 f(xi)Hi(9, 5) = f(x10) ·H10(9, 5) + f(x11) ·H11(9, 5) =1, 3 × 0, 44 + 1, 3 × 0, 56 = 0, 57 + 0, 73 = 1, 3 adica valoarea exacta a lui fın punctul 9, 5.
Acest exemplu sugereaza necesitatea introducerii, ın general, pentru Sm(∆n)a unei baze formata cu functii spline cu suport local. Asupra acestui lucruvom reveni ulterior.

36 Capitolul 1. Clase de functii ın teoria aproximarii
Functii spline cubice
Cele mai populare si mai des utilizate ın practica, dintre functiile spline, sıntfunctiile spline cubice.
Definitia 2.4 Fie ∆n = xini=1 o diviziune a intervalului [a, b] cu a =
x1 < x2 < · · · < xn−1 < xn = b. Se numeste functie spline cubica(functia spline polinomiala de gradul trei ) asociata diviziunii ∆n functias : [a, b] → R care satisface urmatoarele conditii:
1) s ∈ C2([a, b]); 2) s|[xi,xi+1] ∈ P3, ∀ i = 1, · · · , n− 1.
Din definitia de mai sus se observa ca o functie spline cubica este o functiespline polinomiala de gradul trei asociata partitiei ∆n.
Vom nota, ca de obicei, cu S3(∆n) multimea functiilor definite pe intervalul[a, b] care satisface conditiile 1) si 2) din definitia de mai sus, adica
S3(∆n) = s : [a, b] → R; s ∈ C2([a, b]), s|[xi,xi+1] ∈ P3, i = 1, . . . , n− 1.
Particularizınd teoremele 2.1 si 2.2 pentru cazul functiilor spline cubiceobtinem:
Teorema 2.5
1) Orice functie spline cubica, s, asociata diviziunii ∆n se poate reprezentaın mod unic sub forma
s(x) =3∑
i=0
bi(x− x1)i +n−1∑
i=2
ai(x− xi)3+ (2.6)
unde bi =s(i)(x1+)
i!, iar ai =
s(3)(xi+)− s(3)(xi−)6
.
2) Functiile (ϕi)n+2i=1 unde ϕi(x) = (x − x1)i−1, pentru 1 ≤ i ≤ 4 si
ϕi+3(x) = (x− xi)3+, i = 2, . . . , n− 1 constituie o baza pentru S3(∆n)si dimensiunea spatiului S3(∆n) este n + 2.
Demonstratie. Se particularizeaza rezultatele din teoremele 2.2 si 2.3 pen-tru m = 3. 2
Cu ajutorul valorilor functiei s si a derivatelor sale ın nodurile diviziunii ∆n
se obtine o alta reprezentare pentru o functie spline cubica.

§2. Clasa functiilor spline 37
Propozitia 2.2 O functie spline cubica s ∈ S3(∆n) pe orice interval [xi, xi+1),i = 1, · · · , n− 1 al diviziunii ∆n se reprezinta ın mod unic sub forma:
s(x) = c1,i + c2,i(x− xi) +c3,i
2(x− xi)2 +
c4,i
6(x− xi)3 (2.7)
unde
c1,i = s(xi), c2,i = s′(xi)
c3,i =[6 · s(xi+1)− s(xi)
xi+1 − xi− (4s′(xi) + 2s′(xi+1))
]: (xi+1 − xi)
c4,i =6
(xi+1 − xi)2[s′(xi) + s′(xi+1)− 2
s(xi+1)− s(xi)xi+1 − xi
](2.8)
sau
c1,i = s(xi), c3,i = s′′(xi)
c2,i =s(xi+1)− s(xi)
xi+1 − xi−
[s′′(xi+1
6+
s′′(xi)3
]· (xi+1 − xi)
c4,i =s′′(xi+1)− s′′(xi)
xi+1 − xi
(2.9)
Demonstratie. Functia s pe intervalul [xi, xi+1], fiind un polinom de gradultrei, se poate scrie sub forma:
s(x) = c1,i + c2,i(x− xi) +c3,i
2(x− xi)2 +
c4,i
6(x− xi)3
iar coeficientii cj,i j = 1, 2, 3, 4 se determina prin identificare. 2
Teorema 2.6 Fie s ∈ S3(∆n).
1) Vectorul (s1, . . . , sn) ∈ Rn, unde si = s′(xi) verifica sistemul algebric
(xi+1 − xi)si−1 + 2(xi+1 − xi−1)si + (xi − xi−1)si+1 = di,i = 2, . . . , n− 1 (2.10)
unde
di = 3[s(xi)− s(xi−1)
xi − xi−1· (xi+1 − xi) +
s(xi+1)− s(xi)xi+1 − xi
· (xi − xi−1)]

38 Capitolul 1. Clase de functii ın teoria aproximarii
2) Vectorul (m1, . . . , mn) ∈ Rn, unde mi = s′′(xi) verifica sistemul deecuatii algebrice
(xi − xi−1)mi−1 + 2(xi+1 − xi−1)mi + (xi+1 − xi)mi+1 = di,i = 2, . . . , n− 1
(2.11)unde
di = 6[s(xi+1)− s(xi)
xi+1 − xi− s(xi)− s(xi−1)
xi − xi−1
]
Demonstratie. 1) Tinınd seama de Propozitia 2.2, pe orice interval [xi, xi+1)i = 1, · · · , n− 1, functia s se reprezinta ın mod unic sub forma
s(x) = c1,i + c2,i(x− xi) +c3,i
2(x− xi)2 +
c4,i
6(x− xi)3
unde c1,i = s(xi), c2,i = si = s′(xi)
c3,i =[6s(xi+1)− s(xi)
xi+1 − xi− (4si + 2si+1)
]: (xi+1 − xi)
c4,i =6
(xi+1 − xi)2[si+1 + si − 2
s(xi+1)− s(xi)xi+1 − xi
].
Functia s fiind de clasa C2 rezulta ca s(xi + ) = s(xi − ), s′(xi−) =s′(xi+), s′′(xi−) = s′′(xi+) pentru orice i = 2, · · · , n−1. Conditia s′′(xi−) =s′′(xi+) revine la
c3,i−1 + c4,i−1(xi − xi−1) = c3,i
ın care tinınd seama de expresiile lui c3,i−1, c3,i, c4,i−1 rezulta
6s(xi)− s(xi−1)(xi − xi−1)2
− 2si + 4si−1
xi − xi−1+
+[6
si + si−1
(xi − xi−1)− 12
s(xi)− s(xi−1)(xi − xi−1)3
](xi − xi−1) =
= 6s(xi+1)− s(xi)(xi+1 − xi)2
− 2si+1 + 4si
xi+1 − xi, i = 2, . . . , n− 1
de unde
si−1
xi − xi−1+ 2si
( 1xi − xi−1
+1
xi+1 − xi
)+
si+1
xi+1 − xi=

§2. Clasa functiilor spline 39
= 3[s(xi+1)− s(xi)
(xi+1 − xi)2+
s(xi)− s(xi−1)(xi − xi−1)2
], i = 2, . . . , n− 1
sau ınca
(xi+1 − xi)si−1 + 2(xi+1 − xi−1)si + (xi − xi−1)si+1 =
3[s(xi+1)− s(xi)
xi+1 − xi(xi − xi−1) +
s(xi)− s(xi−1)xi − xi−1
(xi+1 − xi)]
i = 2, . . . , n− 1
adica am obtinut sistemul (2.10).
2) Tinınd seama de Propozitia 2.2, pe orice interval [xi, xi+1), 1 ≤ i ≤ n−1,functia s se reprezinta ın mod unic sub forma
s(x) = c1,i + c2,i(x− xi) +c3,i
2(x− xi)2 +
c4,i
6(x− xi)3
unde c1,i = s(xi), c3,i = mi = s′′(xi)
c2,i =s(xi+1)− s(xi)
xi+1 − xi−
(s′′(xi+1)6
+s′′(xi)
3
)· 1xi+1 − xi
c4,i =s′′(xi+1)− s′′(xi)
xi+1 − xi.
Din conditia s′(xi−) = s′(xi+) obtinem
c2,i = c2,i−1 +s′′(xi−1) + s′′(xi)
2(xi − xi−1)
de unde tinınd seama de forma coeficientilor c2,i−1, c2,i obtinem
(xi − xi−1)mi−1 + 2(xi+1 − xi−1)mi + (xi+1 − xi)mi+1 =
6[s(xi+1)− s(xi)
xi+1 − xi− s(xi)− s(xi−1)
xi − xi−1
]i = 2, . . . , n− 1
adica am obtinut sistemul (2.11). 2

40 Capitolul 1. Clase de functii ın teoria aproximarii
B - spline cubic
Vom construi, ın cele ce urmeaza, o baza cu suport local pentru S3(∆n).Consideram, pentru ınceput, cazul ın care diviziunea ∆n este formata cupuncte echidistante (ın progresie aritmetica ), adica xi = x1 + (i − 1)h, cuh = (b− a)/(n− 1). Pentru i = 0, 1, . . . , n, n + 1 construim functiile
Bi(x) =1h3
(x− xi−2)3, daca x ∈ [xi−2, xi−1]
h3 + 3h2(x− xi−1) + 3h(x− xi−1)2 − 3(x− xi−1)3,daca x ∈ [xi−1, xi]
h3 + 3h2(xi+1 − x) + 3h(xi+1 − x)2 − 3(xi+1 − x)3,daca x ∈ [xi, xi+1]
(xi+2 − x)3, daca x ∈ [xi+1, xi+2]
0, altfel .
Functia Bi este reprezentata grafic ın Figura 2.3
xi−2 xi−1 xi xi+1 xi+2
Figura 2.3:

§2. Clasa functiilor spline 41
Din definitia lui Bi, usor , se poate constata ca
Bi(xj) =
4 daca j = i1 daca j = i− 1 sau j = i + 10 daca j = i− 2 sau j = i + 2
si ca Bi(x) ≡ 0 pentru x ≤ xi−2 si x ≥ xi+2. De asemenea usor se constata
B′i(xj) =
3/h daca j = i− 10 daca j = i−3/h daca j = i + 1.
si
B′′i (xj) =
6/h2 daca j = i− 1−12/h2 daca j = i6/h2 daca j = i + 1.
Propozitia 2.3
1) Pentru orice i = 0, . . . , n + 1 functiile Bi sınt functii spline cubice pe[a, b] asociate diviziunii ∆n.
2) Functiile B0, B1, . . . , Bn, Bn+1 formeaza o baza pentru S3(∆n).
Demonstratie. 1) Cum Bi ∈ C2([a, b]) si Bi|[xi,xj+1]∈ P3 pentru orice
i = 1, . . . , (n− 1), rezulta ca Bi este o functie spline cubica asociata diviziu-nii ∆n.
2) Fie α0, . . . , αn+1 reale astfel ca∑n+1
j=0 αjBj = 0 pe [a, b]. Egalitatea demai sus este echivalenta cu
n+1∑
j=0
αjBj(x) = 0, ∀ x ∈ [a, b] (2.12)
Scriind relatiile (2.12) ın punctele x = xi, i = 1, . . . , n obtinem n ecuatii, sianume
n+1∑
j=0
αjBj(xi) = 0, ∀ i = 1, . . . , n (2.13)

42 Capitolul 1. Clase de functii ın teoria aproximarii
Derivınd relatia (2.12) ın punctele x1, xn obtinem ınca doua ecuatii si anume
n+1∑
j=0
αjB′j(xi) = 0, i = 1 si i = n (2.14)
Din (2.13) si (2.14) rezulta ca vectorul α = (α0, α1, · · · , αn, αn+1)T verificasistemul de ecuatii Aα = 0 unde
A =
3/h 0 −3/h1 4 1
. . . . . .
1 4 1−3/h 0 3/h
(2.15)
Cum matricea A este diagonal dominanta rezulta ca α = 0, deci functiileB0, B1, · · · , Bn, Bn+1 sınt functii liniar independente pe S3(∆n), sınt ınnumar n + 2 si cum dim(S3(∆n)) = n + 2 rezulta ca B0, B1, · · · , Bn, Bn+1formeaza o baza pentru S3(∆n) 2
Corolarul 2.1 Orice functie spline cubica, s ∈ S3(∆n) se reprezinta, ınmod unic, sub forma
s =n+1∑
j=0
αjBj
unde α = (α0, · · · , αn+1)T este solutia sistemului Aα = b, matricea A fiindcea din (2.15) iar
b = (s′(x1), s(x1), . . . , s(xn), s′(xn))T .
Demonstratie. Cum B0, . . . , Bn+1 este o baza pentru S3(∆n), pentruorice s ∈ S3(∆n) exista α = (α0, α1, . . . , αn, αn+1)T unic astfel ca
s(x) =n+1∑
j=0
αjBj(x)
pentru orice x ∈ [a, b]. Scriind relatia de mai sus ın punctele x = xi,i = 1, . . . , n si apoi derivata sa ın punctele x1, xn, obtinem sistemul

§2. Clasa functiilor spline 43
Aα = b. Matricea A fiind diagonal dominanta rezulta ca A este nesingularadeci α = A−1b 2
In cazul ın care diviziunea ∆n nu este echidistanta vom arata, ulterior, cafunctiile B0, B1, · · · , Bn, Bn+1 definite prin
Bi(t) = (xi+2 − xi−2)[xi−2, xi−1, xi, xi+1, xi+2]Ft
unde Ft(x) = (x− t)3+, este o baza pentru S3(∆n) pe [a, b].
Functii spline polinomiale cu deficienta
Functiile spline de gradul m, definite ın sectiunea anterioara, apartin claseiCm−1 pe ıntreaga axa reala. Deoarece pe fiecare subinterval aceasta functieeste un polinom, conditiile de netezime se impun numai ın nodurile diviziunii∆n. Aceste conditii de racordare ın noduri pot fi slabite, cerınd ca ın fiecarenod sa avem o racordare mai putin neteda si care poate diferi de la nod lanod. Aceasta ne va conduce la definirea, asa numitelor, functii spline cudeficienta.
Fie ∆n = xini=1 o diviziune a intervalului ınchis [a, b] cu a < x1 < x2 <
· · · < xn < b. Fie m un intreg pozitiv si fie K = k1, . . . , kn un vector deıntregi cu 0 ≤ ki ≤ m numit vector de incidenta.
Definitia 2.5 O functie s : [a, b]−→R se numeste functie polinomiala degradul m cu deficienta K, ın raport cu diviziunea ∆n, daca satisface urma-toarele conditii:
1) s|[xi,xi+1) ∈ Pm, i ∈ 0, 1, . . . , n
2) s(j)(xi−) = s(j)(xi+), 0 ≤ j ≤ m− ki, i ∈ 1, . . . , n.
Vom nota multimea astfel definita prin Sm(K,∆n)
• Daca ın definitia de mai sus luam k1 = · · · = kn = k atunci spatiulSm(K, ∆n) se numeste spatiul functiilor spline cu deficienta k.
Se observa usor ca daca K = (k, . . . , k), 0 ≤ k ≤ m atunci
s ∈ Sm(K, ∆n) ⇐⇒ s ∈ Cm−k([a, b]) ∩ PPm(∆n).
• Daca k1 = · · · kn = 0 atunci Sm(K,∆n) = Pm,daca k1 = · · · = kn = 1 atunci Sm(K, ∆n) = Sm(∆n)iar daca k1 = · · · = kn = m atunci Sm(K, ∆n) = PPm(∆n).

44 Capitolul 1. Clase de functii ın teoria aproximarii
Teorema 2.7 Orice element s ∈ Sm(K, ∆n) se reprezinta ın mod unic subforma
s(x) =m∑
i=0
ai(x− x1)i +n∑
p=1
m∑
r=m−kp+1
αp,r(x− xp)r+ (2.16)
unde (x− xp)r+ = (max0, x− xp)r.
Demonstratie. Se face analog cu demonstratia Teoremei 2.1 2
Se observa ca s se mai poate scrie
s(x) =m∑
i=0
ai(x− a)i +n∑
i=1
li∑
j=0
βij(x− xi)m−j+
unde li = ki − 1.
Teorema 2.8 Fie ∆n = xin+1i=0 cu a = x0 < x1 < · · · < xn < xn+1 = b o
diviziune a intervalului [a, b], m un ıntreg pozitiv, K = (k1, . . . , kn) un vectorde incidenta.
1) Spatiul Sm(K, ∆n) este finit dimensional si
dim(Sm(K,∆n)) = m + 1 +n∑
p=1
kp = m + 1 + |K|
2) Functiile ϕij cu j = 0, . . . , ki − 1; i = 0, . . . , n definite prin ϕij(x) =(x− xi)
m−j+ , unde k0 = m + 1, formeaza o baza ın Sm(K,∆n).
Demonstratie. La fel ca ın demonstratia Teoremei 2.2 se arata caϕij ∈ Sm(K,∆n) cınd j = 0, . . . , ki − 1, i = 0, . . . , n si ın plus ca sıntliniar independente. Cum orice element din Sm(K,∆n) se reprezinta ın modunic cu ajutorul functiilor (ϕij), ceea ce rezulta din Teorema 2.7, obtinem ca(ϕij) formeaza o baza pentru Sm(K, ∆n), fiind un sistem de generatori liniarindependenti. Dimensiunea spatiului Sm(K, ∆n) rezulta imediat, deoarece
dim(Sm(K,∆n)) =n∑
i=0
ki = k0 +n∑
k=1
ki = m + 1 +n∑
i=1
ki = m + 1 + |K|.
2

§2. Clasa functiilor spline 45
Functi spline de baza ( B - spline)
Analog modului in care am construit o baza locala pentru functiile spline degradul ıntıi vom construi o baza locala pentru Sm(K, ∆n).
Lema 2.1 Fie t1 < t2 < · · · < td, 1 ≤ li ≤ r i = 1, 2, . . . , d date. Atunci,daca
∑di=1 li > r exista (αi,1, . . . αi,li)
ni=1 nu toate nule astfel ca
B(x) =d∑
i=1
li∑
j=1
αij(x− ti)r−j
(r − j)!
satisface B(x) = 0 pentru x < t1 si x > td. Pe de alta parte, daca avemd∑
i=1
li ≤ r, atunci B este functia nula.
Demonstratie. Este clar, ca pentru orice constante (αij) B(x) = 0 cındx < t1. Daca B(x) este zero pentru x > td, atunci trebuie ca
B(x) =d∑
i=1
li∑
j=1
αij
r−j∑
ν=0
xν
ν!· (−ti)r−j−ν
(r − j − ν)!= 0 (2.17)
unde am folosi binomul lui Newton pentru dezvoltarea (x− ti)m−j). Luınd
γijν =
(−ti)r−j−ν
r − j − ν)!, ν = 0, . . . , r − j
0, ν = r − j + 1, . . . ,m− 1,
putem rescrie ecuatiile (2.17) ca
d∑
i=1
li∑
j=1
αij
r−1∑
ν=0
xν
ν!γijν =
r−1∑
ν=0
xν
ν!
d∑
i=1
li∑
j=1
αijγijν = 0
Deoarece 1, x, . . . , xr−1 sınt liniar independente, relatiile de mai sus sıntechivalente cu
d∑
i=1
li∑
j=1
αijγijν = 0, ν = 0, 1, . . . , r − 1. (2.18)

46 Capitolul 1. Clase de functii ın teoria aproximarii
Acesta este un sistem omogen de r ecuatii pentrud∑
i=1
li necunoscute, si
aceasta are ıntotdeauna o solutie nebanala dacad∑
i=1
li > r. Sa examinam
sistemul (2.18) mai ın detaliu. Scriind ecuatiile ın ordinea ν = r − 1, . . . , 0putem sa scriem (2.18) sub forma
[M1 · · ·Md]
α1,1...
α1,l1...
αd,1
αd,ld
= 0
unde pentru i = 1, 2, . . . , d
Mi =
1 0 · · · 0−ti 1 · · · 0...
......
(−ti)li
(li)!(−ti)li−1
(li − 1)!· · · 1
......
...(−ti)r−2
(r − 2)!(−t1)r−1
(r − 3)!· · · (−τi)r−li−1
(m− li − 1)!(−ti)r−1
(r − 1)!(−ti)r−2
(r − 2)!· · · (−ti)r−li
(r − li)!
Presupunem acum ca∑d
i=1 li ≤ r. Atunci matricea patrata formata cuprimele
∑di=1 li linii are determinantul nenul (fiind un determinant Vander-
monde generalizat). Rezulta ca singura relatie posibila a sistemului (2.18)este solutia nula. 2
Lema 2.1 arata ca pentru a construi o combinatie liniara de functii plus care
sa se anuleze ın afara intervalului finit, trebuie sa avemd∑
i=1
li ≥ r + 1.
Sa consideram cazul cındd∑
i=1
li = r + 1 mai in detaliu.

§2. Clasa functiilor spline 47
Definitia 2.6 Fie · · · ≤ y−1 ≤ y0 ≤ y1 ≤ · · · un sir de numere reale.Pentru ıntregii i si m > 0, definim
Qmi (x) =
(−1)m[yi, . . . , yi+m](x− y)m−1+ , daca yi < yi+m
0, altfel(2.19)
pentru orice x real. Functiile Qmi se numesc functii spline de baza (B-spline)
de gradul m− 1 asociat cu nodurile yi, . . . , yi+m.
Putem da o forma explicita pentru Qmi ın cazul ın care yi sau yi+m este un
nod de multiplicitate m.
Teorema 2.9 Daca yi < yi+1 = · · · = yi+m atunci
Qmi (x) =
(x− yi)m−1
(yi+m − yi)m, yi ≤ x ≤ yi+m
0, altfel
(2.20)
Similar, daca yi = · · · = yi+m−1 < yi+m atunci
Qmi (x) =
(yi+1 − x)m−1
(yi+1 − yi)m, yi < x ≤ yi+m
0, altfel .
(2.21)
Demonstratie. In acest caz determinantii
D
(yi, yi+1, · · · , yi+m−1 yi+m
1, y, · · · , ym−1 (x− y)m+
), D
(yi, yi+1, · · · yi+m
1, y, · · · , ym
),
care intra ın definitia diferentei divizate [yi, · · · , yi+m](x− y)m−1+ se pot cal-
cula efectiv 2
Teorema 2.10 Fie yi < yi+m si presupunem
yi ≤ · · · ≤ yi+m =l1︷ ︸︸ ︷
t1, . . . , t1, . . . ,
ld︷ ︸︸ ︷td, · · · , td
Atunci
Qmi (x) =
d∑
j=1
lj∑
k=1
αjk(x− tj)m−k+ (2.22)

48 Capitolul 1. Clase de functii ın teoria aproximarii
cu αj,lj 6= 0, j = 1, . . . , d. Mai mult,
[Qmi ](k)(tj−) = (Qm
i )(k)(tj+), k = 0, 1, . . . , m− lj − 1, j = 1, 2, . . . , d (2.23)
adica Qmi este un spline polinomial de gradul m− 1 cu nodurile t1, . . . , td de
multiplicitate l1, . . . , ld.
Demonstratie. Expresia (2.22) rezulta din dezvoltarea diferentei divizate,adica [t1, . . . , tr+1]f =
∑di=1
∑lij=1 αijf
(j−1)(ti). Proprietatea (2.23) rezultapentru functia plus, si deci pentru Qm
i 2
Urmatorul rezultat va fi folositor ın descrierea structurii functiilor Qmi pentru
multimea nodurilor yi, . . . , yi+m. El este de asemenea crucial ın evaluareanumerica a functiilor B-spline.
Teorema 2.11 Fie m ≥ 2, si presupunem yi < yi+m. Atunci pentru oricex ∈ R
Qmi (x) =
(x− yi)Qm−1i (x) + (yi+m − x)Qm−1
i+1 (x)yi+m − yi
(2.24)
Demonstratie. Pentru yi < yi+1 = · · · yi+m sau yi = · · · = yi+m−1 < yi+m,rezultatul se obtine din Teorema 2.9. Deci, putem presupune yi+1 < yi+m siyi < yi+m−1. Observam ca (x− y)m−1
+ = (x− y)m−2+ (x− y). Folosind regula
lui Leibnitz pentru diferenta divizata obtinem
(−1)m[yi, . . . , yi+m](x− y)m−1+ =
= (−1)m[yi; yi+1](x− y)× [yi+1, . . . , yi+m](x− y)m−2+ +
(x− yi)(−1)m[yi, . . . , yi+m](x− y)m−2+
Cum (−1)m[yi, . . . , yi+m](x− y)m−2+ =
(−1)m−1
yi+m − yi
[yi, · · · , yi+m−1](x− y)m+2
+ − [yi+1, · · · , yi+m](x− y)m−2+
=
Qm−1i (x)−Qm−1
i+1 (x)yi+m − yi
substituind si rearanjınd termenii obtinem (2.24). 2
Teorema 2.11 furnizeaza o relatie de recurenta ıntre functiile B-spline degradul m− 1 si cele de gradul m− 2. Urmatorul rezultat arata ca derivatelefunctiilor spline de gradul m− 1 pot fi scrise folosind doua functii B-splinede grad mai mic.

§2. Clasa functiilor spline 49
Teorema 2.12 Fie yi < yi+m si presupunem ca D+ este operatorul dederivare la dreapta. Atunci
D+Qmi (x) = (m− 1)
Qm−1i (x)−Qm−1
i+1 (x)yi+m − yi
(2.25)
Demonstratie. Daca yi sau yi+m au multiplicitatea m, atunci rezultatul seobtine direct din Teorema 2.9. Daca nu, atunci
D+Qmi (x) = (−1)m[yi, . . . , yi+m]D+(x− y)m−1
+ =
= (−1)m[yi, . . . , yi+m](m− 1)(x− y)m−2+ =
= (−1)m(m− 1)[yi+1, . . . , yi+m](x− y)m−2
+ − [yi, . . . , yi+m−1](x− y)m−2+
yi+m − yi=
= (m− 1)Qm−1
i (x)−Qm−1i+1 (x)
yi+1 − yi.
2
Putem spune mai mult despre functia Qmi .
Teorema 2.13 Fie m > 1, si presupunem yi < yi+m. Atunci
Qmi (x) > 0 pentru yi < x < yi+m (2.26)
siQm
i (x) = 0 pentru x < yi si x > yi+1 (2.27)
La capetele intervalului (yi, yi+m) avem
(−1)k+m−αiDk+Qm
i (yi) = 0, k = 0, 1, . . . , m− 1> 0, k = m− αi, . . . , m− 1 (2.28)
si
(−1)m−βi+mDk−Qmi (yi+m) = 0, k = 0, 1, . . . , m− 1− βi+m
> 0, k = m− βi+m, . . . , m− 1 (2.29)
undeαi = maxj, yi = · · · = yi+j−1
βi+m = maxj, yi+m = · · · = yi+m−j+1.

50 Capitolul 1. Clase de functii ın teoria aproximarii
Demonstratie. Pentru a demonstra (2.26) procedam prin inductie dupa m.Cum
Q1i (x) =
1yi+1 − yi
, yi ≤ x ≤ yi+1
0, altfel
este clar ca Q1i (x) > 0 pentru yi < x < yi+1. Presupunem acum ca propri-
etatea are loc pentru m− 1. Atunci pentru yi < x < yi+m, functiile (x− yi)si (yi+m−x) din relatia de recurenta (2.24) sınt pozitive. Mai mult Qm−1
i (x)si Qm−1
i+1 (x) sınt nenegative, si cel putin una dintre ele este pozitiva. Rezultaca Qm
i (x) > 0. Din definitia functiei plus, este clar ca Qmi (x) = 0 pentru
x < yi. Pe de alta parte, pentru x > yi+m, functia Qmi (x) este diferenta
de ordin m pentru polinomul (x − y)m−1 si deci este deasemenea zero.Anularea derivatelor indicate ın yi, yi+m rezulta acum din faptul ca Qm
i
este zero ın afara intervalului (yi, yi+m) cuplata cu proprietatea de continu-itate (2.23) a derivatelor. Ramıne sa stabilim asertiunile ramase ın (2.28) si(2.29). Daca αi = m sau βi+m = m putem verifica direct semnele acestorderivate. Daca αi si βi+m sınt mai mici ca m, putem proceda prin inductiedupa m. Cazul m = 2 este usor de verificat. Sa presupunem acum ca (2.28)are loc pentru functia spline de gradul m− 2. Apoi cuplınd
(−1)k+m−αiDk−1+ Qm−1
i (yi) > 0 si (−1)k+m−1−αiDk−1+ Qm−1
i+1 (yi) > 0
cu formula (2.25), obtinem (2.28) pentru k = m−αi, · · · ,m−1. Demonstratiapentru (2.29) este similara. 2
Urmatorul rezultat se ocupa cu independenta liniara a functiilor B-spline.
Teorema 2.14 Fie yl < yl+1. Acoperirea liniara a functiilor (Qmi )l
i=l+1−meste Pm−1 pe [yl, yl+1). Mai general, daca l < r si yr−1 < yr atunci functiile(Qm
i )r−1i=l−m+1 sınt liniar independente pe [yl, yr).
Demonstratie. Restrictionate la intervalul Il = [yl, yl1), fiecare functiespline (Qm
i )ll+1−m este un polinom din Pm−1. Deci pentru a stabili asertiunea,
avem numai sa aratam ca aceste functii sınt liniar independente pe Ii. Pre-supunem acum ca
s(x) =l∑
i=l+1−m
ciQmi (x) = 0 pentru orice x ∈ Il. (2.30)

§2. Clasa functiilor spline 51
2
Presupunem ca nu toti ci sınt zero, si fie cp primul coeficient nenul.Presupunem
yp, . . . , yl =l1︷ ︸︸ ︷
t1, . . . , t1, . . . ,
ld︷ ︸︸ ︷td, . . . , td
s(x) =l∑
i=p
ciQmi (x) =
d∑
j=1
lj∑
k=1
αjk(x− tj)m−1+
cu αj,lj 6= 0. Observam ca s(x) = 0 pentru x < yp = t1 si pentru x > yl = td.
Dar deoarece∑d
i=1 li ≤ m, aceasta contrazice Lema 2.1, si concludem ca totici ın (2.30) sınt nuli, care arata liniar independenta ceruta.
Sa presupunem acum ca [yl, yr) consta ın mai mult de un subinterval, si cas(x) =
∑r−1i=l−m+1 ciQ
mi (x) ≡ 0 pe [yl, yr). Dar din cele demonstrate anterior,
coeficientii functiilor B-spline cu suportul incluzınd intervalul [yν , yν+1) tre-buie sa fie zero cınd [yν , yν+1) este un subinterval netrivial ın [yl, yr). Daraceasta implica ca toti coeficientii trebuie sa fie zero, si demonstratia estecompleta. 2
Pına acum nu am spus nimic despre marimea valorilor functiilor B-spline.Functiile B-spline Qm
i au valori ce depind de modul de pozitionare a nodurilor.De exemplu, ın intervalul [yi, yi+1) B-splinul Q1
i (x) = 1/(yi+1 − yi) poatefi extrem de mare sau extrem de mic, depinzınd de spatiul dintre noduri.Pentru calcule nu este acceptabil sa folosim functii ce au valori prea mici sauprea mari. Aceasta sugereaza introducerea functiilor B-spline normalizate.
Definitia 2.7 FieNm
i (x) = (yi+m − yi)Qmi (x) (2.31)
unde Qmi este functia B-spline definita ın Definitia 2.6. Numim Nm
i functiaB-spline normalizata de ordinul m− 1, asociata cu nodurile yi, . . . , yi+m.
Pentru m = 1, functia B-spline normalizata asociata cu yi < yi+1 este datade
N1i (x) =
1, yi ≤ x < yi+1
0, altfel(2.32)
Rezulta din teorema urmatoare ca
0 ≤ Nmi (x) ≤ 1 pentru orice x ∈ R. (2.33)

52 Capitolul 1. Clase de functii ın teoria aproximarii
Teorema 2.15 Functiile B-spline normalizate formeaza o partitie a unitatii,adica
j∑
i=j+1−m
Nmi (x) = 1 pentru yj ≤ x < yj+1
Demonstratie. Din (2.32) rezulta ca afirmatia este adevarata pentrum = 1. Vom proceda acum prin inductie. Presupunem ca ea este corectapentru functiile B-spline normalizate de gradul m− 2. Atunci din relatia derecurenta (2.24) avem
j∑
i=j+1−m
Nmi (x) =
j∑
i=j+1−m
[(x− yi)Qm−1i (x) + (yi+m − x)Qm−1
i+1 ] =
=j∑
i=j+2−m
(x− yi + yi+m−1 − x)Qm−1i (x) =
j∑
i=j+2−m
Nm−1i (x) = 1.
2
Presupunem y1 < y2 < · · · < yn+m este un sir de puncte cu yi < yi+m pen-tru orice i si presupunem ca Nm
1 , . . . , Nmn sınt functii B-spline normalizate
asociate cu nodurile y1, . . . , yn+m. Urmatorul rezultat este util ın problemainterpolarii si ın problema celei mai bune aproximari prin functii spline degradul m− 1.
Teorema 2.16 Fie t1 < · · · < tn. Atunci matricea
M
(t1, . . . , tn
Nm1 , . . . , Nm
n
)=
(Nm
j (ti))n
i,j=1(2.34)
este nesingulara daca si numai daca
ti ∈ σi = x | Nmi (x) 6= 0, i = 1, . . . , n. (2.35)
Demonstratie. Pentru comoditate, sa notam (conform Teoremei 2.13) ca
σi =
(yi, yi+m) daca yi < yi+m−1
[yi, yi+m) altfeli = 1, . . . , n (2.36)
Pentru m = 1 teorema a fost demonstrata ın Teorema 2.9. Presupunemca m > 1. Aratam pentru ınceput ca daca (2.35) nu este satisacuta atuncideterminantul D al matricei M este zero.

§2. Clasa functiilor spline 53
In functie de pozitia lui tj pot aparea doua cazuri:Cazul 1. Presupunem ca tj este prea departe de capatul din stinga ca sa fieın σj . Atunci Nm
µ (tν) = 0 pentru 1 ≤ ν ≤ j ≤ µ ≤ n. In acest caz primele jlinii ale lui D sınt clar liniar dependente si deci D = 0.
Cazul 2. Presupunem ca tj este la dreapta capatului din dreapta a interva-lului σj . In acest caz un argument similar arata ca elementele din coloanele1, 2, . . . , j si liniile j, . . . , n sınt zero. Din nou, rezulta D = 0.
Presupunem ca (2.35) are loc, dar totusi M este o matrice singulara. Atunciexista c1, . . . , cn, nu toate nule, astfel ca
s(ti) =n∑
j=1
cjNmj (ti) = 0, i = 1, 2, . . . , n
Fie l astfel ca cl sa fie primul coeficient nenul, si fie
r = minj ≥ l; s(x) = 0 pe intervalul cu capatul din stınga yj+m.Faptul ca s(x) = 0 pe (yr+m, yr+m+1) implica, din liniar independentafunctiilor B-spline, Nm
i , cr+1 = · · · cr+m−1 = 0. Din nou exista doua cazuri:Cazul 1. tl > yl. Atunci s =
∑ni=l ciN
mi are zerouri ın tl, . . . , tr ceea ce nu
se poate.Cazul 2. tl = yl. Acest caz se poate ıntımpla numai daca yl = · · · = yl+m−1.Dar atunci obtinem contradictia
0 = s(tl) = clNml (tl) 6= 0.
Am aratat ca M nu poate fi singulara cınd (2.35) sınt satisfacute. 2
Functii spline naturale
Vom considera ın cele ce urmeaza un subspatiu liniar al spatiului functiilorspline S2m−1(K, ∆n) ce joaca un rol important ın aplicatii. PresupunemK = k1, . . . , kn, 0 ≤ ki ≤ m. Multimea
SN 2m−1(K, ∆) = s ∈ S2m−1(K,∆n); s0 = s |[a,x1) si sn = s |[xn,b)∈ Pm−1se formeaza spatiul functiilor spline naturale de ordin 2m (grad 2m−1 ) cunodurile x1, . . . , xn si vectorul de incidenta K = k1, . . . , kn.Deoarece dimensiunea spatiului S2m−1(K, ∆) este 2m + |K| si s-au impus2m conditii ın plus pentru definirea spatiului SN 2m−1(K,∆), este naturalsa credem ca dimensiunea spatiului SN va fi |K|.

54 Capitolul 1. Clase de functii ın teoria aproximarii
Teorema 2.17 Spatiul SN 2m−1(K, ∆n) este un spatiu finit dimensional iardimensiunea este |K| = ∑n
i=1 ki.
Demonstratie. Relatiile care leaga bucatile de polinoame ın noduri pot fidescrise de sistemul Ac = 0 cu
A =
EA1 −A1
A2 −A2
. . . . . .Am −Am
E
unde
Ai =
1 xi · · · xmi−1i
(mi − 1)!· · · x2m−1
i
(2m− 1)!
1 · · · xmi−2i
(mi − 2)!· · · x2m−2
i
(2m− 2)!. . .
......
1 · · · x2m−mii
(2m−mi)!
si E este o matrice cu m linii si 2m coloane avınd primele m coloane nule iarultimile m coloane fiind coloanele matricei identitate de ordinul m. (mi =2m− ki).
Matricea A are rangul egal cu numarul de linii, adica 2m+∑n
i=1 mi. Deoarecec este un vector cu 2m(n + 1) componente deducem ca SN are dimensiunea∑n
i=1 ki = |K|. 2
Pentru SN 2m−1(K, ∆n) se poate construi o baza cu suportul mic, atıt denecesara ın aplicatii.
Dat j ≥ 1, k ≥ 1 si yi ≤ yi+1 ≤ · · · ≤ yi+j , definim
Lkij(x) =
[yi, · · · , yi+j ](y − x)k−1+ , yi < yi+j
0 yi = yi+j
si
Rkij(x) =
(−1)j [yi, · · · , yi+j ](x− y)k−1+ , yi < yi+j
0 yi = yi+j
.

§2. Clasa functiilor spline 55
Functiile B-spline definite ın paragraful anterior sınt date prin
Qki (x) = Lk
i,k(x) = Rki,k(x) (2.37)
exceptınd cazul cınd x cade pe un nod multiplu de ordinul k. Este clar caLk
i,j si Rki,j sınt functii spline de gradul k − 1. Cıteva proprietati, imediate,
ale acestor functii sınt date mai jos.
Teorema 2.18 Pentru 0 ≤ j ≤ k
Lkij(x) = 0 pentru x > yi+j si Lk
ij(x) > 0 pentru x < yi+j (2.38)
Lkij este un polinom de ordinul k − j pentru x < yj
D+Lkij(x) = −(k − 1)Lk−1
ij (x) (2.39)
Lkij(x) =
Lk−1i,j (x) + (yi+j − x)Lk−1
ij (x) daca j > 1
(yi+j − x)Lk−1ij (x) daca j = 0
(2.40)
Similar
Rkij(x) = 0 pentru x < yi si Rk
ij(x) > 0 pentru x > yi,
Rkij este un polinom de gradul k − j pentru x > yi+j
D+Rkij(x) = (k − 1)Rk−1
ij (x)
Rkij(x) = Rk−1
i,j−1(x)− (x− yi)Rk−1ij (x), j > 1
Demonstratie. Vom analiza proprietatile pentru L, cele pentru R se sta-bilesc analog. Prima parte a lui (2.38) este clara deoarece (y−x)k
+ se anuleazapentru x > y. Afirmatia privind pozitivitatea rezulta inductiv din relatia(2.40) si din faptul ca Lk
i,0(x) = (yi − x)k−1+ . Formula de derivare (2.39)
rezulta direct din definitie. Pentru a demonstra recurenta, aplicam regulalui Leibnitz pentru (y − x)k−2
+ (y − x) si obtinem
Lkij(x) = [yi, . . . , yi+j−1](y − x)k−2
+ × [yi+j−1, yi+j ](y − x)+
[yi, · · · , yi+j ](y − x)k−2+ × [yi+j ](y − x) = Lk−1
i,j−1(x) + (yi+j − x)Lk−1ij (x).
2

56 Capitolul 1. Clase de functii ın teoria aproximarii
Teorema 2.19 Fie k = |K| ≥ 2m si fie
Bi(x) =
L2mm+1,m+i−1(x), i = 1, 2, · · · ,m
N2mi (x), i = m + 1, . . . , k −m
R2mi,m+k−i, i = k −m + 1, . . . , k
(2.41)
Atunci (Bi)ki=1 este o baza pentru SN 2m−1(K, ∆).
Demonstratie. Din teorema anterioara fiecare din aceste functii apartinspatiului SN . Cum deja stim dimensiunea lui SN , ca fiind k ramıne saaratam liniar independenta functiilor B1, . . . , Bk. Presupunem
∑ki=1 ciBi =
0. Atunci pentru x < yi avem∑m
i=1 ciBi(x) ≡ 0. Dar fiecare din acestefunctii spline se reduce la un polinom avınd gradul m− i, si deci ci trebuiesa fie zero. Un argument analog arata ca ck−m+1, . . . , ck trebuie sa fie zero.Dar restul ci-lor trebuie sa fie zero datorita liniar independentei functiilorB-spline N2m
i , i = m + 1, · · · , k −m. 2
2.3 Functii spline generalizate
Functiile spline polinomiale studiate anterior au dat nastere la o multime degeneralizari. Doua directii s-au impus ın definirea acestor generalizari.
Clasa functiilor spline algebrice generalizate
Una din directiile de generalizare a functiilor spline se bazeaza pe faptul cao functie spline este formata din mai multe functii definite pe ”segmente”adiacente care apartin unor anumite clase precizate si care sınt racordateın noduri ıntr-un anumit fel.
Aceasta generalizare porneste de la notiunea de functie spline polinomialasi cuprinde, dupa cum usor se poate imagina si alte clase de functii spline.Aceasta abordare are mai mult un caracter algebric. In cele ce urmeaza vomda o definitie generala a functiilor spline si vom indica cıteva proprietati aleacestor functii.
Fie Ω o multime partial ordonata si presupunem ca
∆ = x1 < x2 < · · · < xk

§2. Clasa functiilor spline 57
este o multime de elemente din Ω, diferite doua cıte doua. Multimea ∆partitioneaza multimea Ω ın k + 1 ”intervale”:
I0 = x ∈ Ω; x < x1
Ii = x ∈ Ω; xi ≤ x < xi+1, i = 2, · · · , k − 1
Ik = x ∈ Ω;xk ≤ x
(2.42)
Presupunem caUi = spui
jnij=1 (2.43)
sınt spatii de functii finit dimensionale pe Ii, i = 0, . . . , k.
Definim analogul spatiului de functii polinomiale pe portiuni.
PW(U0, . . . ,Uk;∆) =
s : Ω → R; exista si ∈ Ui
cu s = si pe Ii, i = 0, 1, . . . , k
(2.44)
Pentru a defini spatiul functiilor generalizate introducem, acum, anumitefunctionale liniare pentru a fi folosite ın fortarea ca anumite bucati din PWsa se lipeasca ıntr-un anumit sens. Presupunem
Γ = Γij ; 0 ≤ i < j ≤ k (2.45)
undeΓij =
(γij
ν, γij
ν )rij
ν=1, 0 ≤ i < j ≤ k (2.46)
unde γijνrij
ν=1 si γijν rij
ν=1 sınt multimi de functionale liniare definite pespatiile Ui si respectiv Uj .
Definitia 2.8 Fie S(U0, · · · ,Uk; Γ : ∆) spatiul de functii s : Ω → R cuproprietatile:
1) s ∈ PW(U0, . . . ,Uk; ∆)
2) γijνsi = γij
ν sj , ν = 1, . . . , rij , 0 ≤ i < j ≤ k.
Numim S spatiul functiilor generalizate relative la U0, . . . ,Uk, Γ si ∆.
Este clar ca S este un spatiu liniar. El consta din toate functiile realedefinite pe Ω astfel ca ın fiecare interval Ii, s este un membru din Ui cuanumite conditii dre racordare.

58 Capitolul 1. Clase de functii ın teoria aproximarii
In particular, cerem ca bucatile din intervalele i si j sa fie astfel ca anumitefunctionale operınd pe bucata i sa aiba aceiasi valoare cu o alta functionala(posibil diferita ) liniara operınd pe bucata j.
Definitia 2.8 duce ideea de spatiu liniar a functiilor spline cıt de departe poatefi dusa. Intervalul a fost ınlocuit cu o multime partial ordonata; polinoameleau fost ınlocuite prin (posibil diferite) spatii de functii pe fiecare subinter-val; iar continuitatea derivatelor ın noduri a fost ınlocuita prin ajustarea( racordarea ) unor functionale liniare.
Inainte de a da cıteva exemple care sa ilustreze cum flexibilitatea Definitiei2.8 poate fi folosita pentru a descrie anumite tipuri neobisnuite de functiispline, sa mai introducem o notatie. In cazul ın care lipirea dintre bucati estedescrisa prin continuitatea derivatelor succesive, este convenabil sa folosimo notatie speciala. In particular, daca R = (r1, . . . , rk) este un vector denumere pozitive, atunci prin S(U0, . . . ,Uk,R;∆) notam spatiul functiilorreale cu proprietatile:
1) s ∈ PW(U0, . . . ,Uk; ∆)
2) Dj−isi−1(xi) = Dj−1si(xi), j = 1, · · · , ri, i = 1, · · · , k.
Definitia 2.8 include evident spatiul functiilor polinomiale studiate anterior.
Exemplu 1. Fie Ω = [−1, 2] si ∆ = 0, 1. Fie U0 = P1, U1 = spex siU2 = spcosx, sinx. PresupunemR ∈ (1, 1). In acest caz S(U0,U1,U2,R; ∆)consta din functiile s : [a, b] → R ce sınt polinoame de gradul ıntıi pe [−1, 0),exponentiala pe [0, 1), si o combinatie liniara de cosx si sin x pe [1, 2] ce sıntcontinue pe [−1, 2].
Exemplu 2. Fie Ω = [a, b]. Luınd ∆ = a < x1 < · · · < xk < b.U0 = U1 = · · · = Uk = Pm−1, Γ = Γi, 1 ≤ i ≤ k unde Γi = γi
νriν=1,
1 ≤ ri ≤ m− 1 se obtin functiile g-spline.
Exemplu 3. Fie L un operator diferential pe I = [a, b] de forma
L = Dm +m−1∑
j=0
aj(x)Dj

§2. Clasa functiilor spline 59
unde aj ∈ Cj(I), NL = ker(L) ⊂ Cm(I) . Luınd ∆ o diviziune a intervaluluiI, adica ∆ = a = x0 < x1 < · · ·xk < xk+1 = b, si M = (m1, . . . , mh) cu1 ≤ mi ≤ m spatiul S(NL;M; ∆) de functii s : [a, b] → R cu proprietatile
1) s ∈ B([a, b]), s |Ii∈ NL, i = 0, 1, . . . , k,
2) Dj−1− s(xi) = Dj−1
+ s(xi), j = 1, 2, · · · ,m−mi, i = 1, · · · , k
este un spatiu de functii spline. In acest fel se obtine spatiul functiilorL-spline cu nodurile x1, . . . , xk de multiplicitate m1, . . . ,mk.
Luınd Ui = NL |Ii , i = 0, . . . , k spatii de dimensiune m,
Γi = (Dj−1− , Dj−1
+ )m−mij=1 , Γ = Γik
i=1
atunci S(U0, . . . ,Uk; Γ; ∆) este format din spatiul functiilor L-spline.
Vom da mai jos dimensiunea spatiului S(U1, . . .Uk; Γ;∆) ın anumite conditiinaturale impuse functiilor liniare din Γ care asigura ca ele sınt compatibileıntre ele. 2
Teorema 2.20 Presupunem ca pentru fiecare j = 1, · · · , k, matricea
A+j =
A+0j
A+1j
...A+
j−1,j
cu A+ij =
γij1 (uj
1) · · · γij1 (uj
nj)
γij2 (uj
1) · · · γij2 (uj
nj)
...γij
rij(uj
1) · · · γijrij
(ujnj
)
(2.47)
are rangul rj = r0j + · · · rj−1,j egal cu numarul de linii. Atunci
dimS = n0 +k∑
j=1
(nj − rj).
Demonstratie. Conditia pentru matricele A+0 , . . . , A+
k poate fi satisfacutanumai daca rj ≤ nj , j = 1, . . . , k. Este clar ca S este un spatiu liniar, si cafiecare s ∈ S se poate scrie sub forma
s(x) = sj(x) =nj∑
p=1
cpjujp(x), pentru x ∈ Ij ; j = 0, . . . , k.

60 Capitolul 1. Clase de functii ın teoria aproximarii
Daca scriem cj = (cj,1, . . . , cj,rj )T atunci folosind conditiile ce intra ın Γ
pentru determinarea coeficientilor c0, c1, . . . , ck obtinem sistemul
A−01 −A+01 0
A−02 0 −A+02
...A−0k 0 0 · · · −A+
0k...0 0 0 · · · A−k−1,k −A+
k−1,k
c0
c1...
...ck
= 0
unde A−ij se definesc la fel ca A+ij ınlocuind γij
ν cu γijν.
Matricea sistemului are∑k
j=0 nj coloane si∑k
j=1 rj linii. Ipoteza teoremeigaranteaza ca rangul matricei este egal cu numarul de linii; deci dimensiuneaspatiului nul este
∑kj=0−
∑kj=1 rj = n0+
∑nj=1(nj−rj). Aceasta este desigur
dimensiunea spatiului S. 2
Constructia unei baze unilaterale La fel cum s-a definit pentru functiilespline polinomiale o baza unilaterala se defineste o baza pentru spatiu S
Lema 2.2 1) Exista B01, · · · , B0,m0 ın S astfel ca B0j(x) = u0j (x) pentru
x ∈ I0, j = 1, · · · ,m0 = n0
2) Pentru firecare i = 1, · · · , k exista Bi1, . . . , Bimi ın S care se anuleazaidentic pentru x < xi, si care sınt liniar independente pe Ii.
Demonstratie. 1) Fixam 1 ≤ j ≤ m0. Definim B0j ca fiind egala cu u0j pe
I0. Acum ca sa extindem aceste functii la I1, I2, . . . , Ik este nevoie sa alegemcoeficientii α0j
pq astfel ca
B0j(x) =np∑
q=1
α0jpqu
pq(x) pentru x ∈ Ip, p = 0, 1, . . . , k.
Ca sa ne asiguram ca B0j ın I0 si I1 sınt bine lipite, trebuie sa alegemcoeficientii α0j
11, · · ·α0j1,n1
astfel ca
A+01
α0j11...
α0j1n1
=
γ 011
u0j
...γ 01
r01u0
j

§2. Clasa functiilor spline 61
Deoarece acesta este un sistem cu r1 ≤ n1 ecuatii (avınd rangul egal cunumarul de linii), poate fi mereu rezolvat. Clar, acest proces poate continuaın intervalele I2, · · · , Ik.2) Fixam 1 ≤ i ≤ k si 1 ≤ j ≤ mi. Pentru x < xi definim Bij(x) = 0. Sadefinim Bij pe intervalul Ii, trebuie sa gasim coeficientii αij
iqniq=1 astfel ca
Bij(x) =ni∑
q=1
αijiqu
iq(x) (2.48)
sa se lipeasca( racordeze ) cu functia 0 ın xi. Pentru aceasta, fie A oricematrice cu ni linii si ni coloane obtinuta din A+
i ( conform (2.47) ) prinadaugarea a mi linii. Deoarece A+
i are rangul egal cu numarul liniilor, putempresupune ca A a fost construita sa fie nesingulara. Alegem acum coeficientiiαij
iq ca solutie a sistemului
A
αiji1
...αij
ini
= δ(ni, ri + j)
unde δ(ni, ri + j) este un vector de lungime ni avınd componentele zerocu exceptia componentei ri + j, care va fi luata 1. Acum Bij este definitape Ii prin (2.48). Folosind tehnica utilizata la punctul 1) putem extindeBij la intervalele Ii+1, . . . , Ik sa obtinem functia spline ın S. Ramıne sademonstram ca Bi1, . . . , Bini sınt liniar independente pe Ii. Pentru a stabiliaceasta, vom construi baza duala pentru aceste functii. Presupunem ca a νlinie adaugata a matricei A este data de
(Ari+ν,1, . . . , Ari+ν,ni), ν = 1, · · · ,mi.
Atunci definim functionalele liniare λi1, . . . , λ
imi
pe Ui prin
λiνu = λi
ν
( ni∑
p=1
αpuip) =
ni∑
p=1
αpAri+ν,p.
Din constructia lui Bij pe Ii, este clar ca (λiν)
mii=1 formeaza o baza duala
pentru (Bij)mij=1, adica
λiν(Bij) = δνj , ν, j = 1, . . . , mi.

62 Capitolul 1. Clase de functii ın teoria aproximarii
Acum putem usor demonstra liniar independenta functiilor Bi1, · · · , Bimi peIi. Intr-adevar, daca
∑mij=1 cjBij = 0, atunci
cν = λiν
( mi∑
i=1
cjBij
)= 0, ν = 1, . . . , mi.
2
Este clar ca exista o anumita nedeterminare ın constructia elementelor debaza ın lema anterioara, adica constructia bazei unilaterale nu este unica.Teorema urmatoare arata ca, oricum, am construi o baza pentru S.
Teorema 2.21 Multimea Bi1, · · · , Bimiki=0 definita ın Lema 2.2 formeaza
o baza pentru S.
Demonstratie. Este clar prin constructie ca fiecare functie Bij apartinelui S. Din Teorema 2.20 stim ca dimensiunea acestui spatiu este egala cum0 +m1 + · · ·+mk. Deci pentru a termina demonstratia, trebuie sa aratamnumai ca functiile sınt liniar independente pe Ω. Presupunem ca
k∑
i=0
mi∑
j=1
cijBij(x) = 0 pentru orice x ∈ Ω.
Pentru x ∈ I0 avem ca c01B01+· · ·+c0m0B0m0 = 0 si cum B01, . . . , B0m0 sıntliniar independente rezulta ca c01, · · · , c0,m0 , sınt zero. Acum consideram xiar intervalul I1. Acum avem c11B11 + · · ·+ c1m1B1m1 = 0 pe acest interval.Din liniar independenta functiilor B11, . . . , B1m1 pe acest interval, gasimca acesti coeficienti sınt de asemenea zero. Acest proces poate continua,considerınd intervalelel Ii cu i = 2, . . . , k. 2
Constructia unei baze locale
Este posibil sa dam un rezultat pe cazul general, dar pentru simplificareanotatiilor sa consideram ca toate spatiile Ui sınt aceleasi si ca
Γ = Γ01, Γ12, · · · , Γk−1,k (2.49)
(astfel ca numai bucatile adiacente sınt fortate sa satisfaca anumite conditii).Pentru a simplifica notatiile, scriem m = m0 = n0 = n1 = · · · = nk sipresupunem
Uj = spu1, . . . , um, pentru i = 0, . . . , k (2.50)

§2. Clasa functiilor spline 63
siΓi−1,i = (γi
ν, γi
νriν=1, i = 1, 2, · · · , k (2.51)
Presupunem ca Bi1, . . . , Bimiki=0 este o baza pentru S construita ın Teo-
rema 2.21. Renumerotam aceasta baza cu un singur indice astfel
ρ1, . . . , ρm+K = B01, . . . , B0m0 , B11, . . . , B1,m1 , . . . Bk1, · · · , Bk,mk(2.52)
unde K =∑k
i=1 mi. Daca introducem notatiile
ym+1 ≤ ym+2 ≤ · · · ≤ ym+K =m1︷ ︸︸ ︷
x1, . . . , x1, . . . ,
mk︷ ︸︸ ︷xk, . . . , xk (2.53)
atunci rezulta ca fiecare ρi se anuleaza identic pentru toti x < yi, undei = m + 1, . . . ,m + K. In general putem scrie
ρi(x) =m∑
j=1
cijuj(x), i = 1, 2, · · · ,m (2.54)
si
ρi(x) =
0, x < yi
m∑
j=1
cijuj(x), x ≥ yi
(2.55)
i = m+1, . . . , m+k pentru anumiti coeficienti cij. Baza unilaterala poateın acest caz sa fie complet descrisa de matricea C = (cij).
Lema 2.3 Presupunem 1 ≤ i1 < i2 < · · · < ir ≤ m + K, si presupunem caδ = (δ1, . . . , δr)T este solutia sistemului liniar omogen
C<i1,···,ir>δ = 0 (2.56)
unde C este matricea care descrie baza unilaterala ρim+K1 si unde C<i1,...,ir>,
este submatricea obtinuta luınd numai coloanele i1, . . . , ir. Atunci
B(x) =r∑
j=1
δjρij (x) (2.57)
este o functie spline ce se anuleaza pentru x < yi1 (daca i1 > m) si pentrux > yir .

64 Capitolul 1. Clase de functii ın teoria aproximarii
Demonstratie. Cınd i1 > m, fiecare functie ρ ce apare ın suma (2.57) seanuleaza pentru x < yi1 , si este clar ca B are aceasta proprietate. Pe de altaparte, ρij (x) = [u1(x), · · · , um(x)] ·C<ij> pentru x > yir deci pentru x > yir
B(x) = [u1(x), . . . , um(x)]C〈i1,...,ir〉δ = 0
2
Lema 2.3 poate fi folosita pentru a construi o baza cu suport local ca ocombinatie de functii spline cu suport unilateral. Ramıne sa vedem daca peaceasta cale putem construi o baza pentru S. In general acest lucru nu esteposibil, asa cum arata exemplul urmator.
Exemplu 5. Fie m = 2, [a, b] = [0, 5], ∆ = 1, 2, 3, 4, si Γ = e′1, e′2, e′3, e′4,unde e′if = f ′(i). Spatiul S(P1, Γ, ∆) are baza unilaterala
1, x ∪ (x− 1)0+, . . . , (x− 4)0+
dar nu are o baza locala.
Intr-adevar, orice functie din S consta, din polinoamele de gradul ıntıi pentrucare derivata de ordinul ıntıi este continua ın noduri (derivata la dreapta esteegala cu derivata la stınga ) dar functia nu este continua
0 1 2 3 4 5
Figura 2.4:
Orice functie din S care se anuleaza ın afara unui interval este fortata decontinuitatea pantei sa aiba panta zero peste tot. Deci functiile spline dinS cu suport local sınt cele cu panta zero, adica sınt constante pe portiuni.Dar functia spline s(x) = x apartine spatiului S, si evident nu poate fi

§2. Clasa functiilor spline 65
reprezentata ca o combinatie liniara de functii constante pe portiuni. Rezultaca S(P1, Γ;∆) nu poate avea o baza formata cu functii spline cu suport local.
Lema 2.4 Daca βν = (βν1 , . . . , βν,m+K), ν = 1, . . . , q este o multime de q
vectori liniar independenti ın Rm+K atunci functiile spline
Bν =m+K∑
j=1
βνjρj , ν = 1, . . . , q
sınt liniar independente.
Demonstratie. Daca d1B1 + · · ·+ dqBq = 0 pe [a, b], atunci
q∑
ν=1
dν
m+K∑
j=1
βνjρj =m+K∑
j=1
ρj
q∑
ν=1
dνβνj = 0
Din liniar independenta functiilor ρ1, . . . , ρm+K rezulta ca d1β1+· · ·+dqβq =0. Dar aceasta implica d1 = · · · = dq = 0 deoarece am propus ca vectoriβ1, · · · , β2 sınt functii liniar independente. 2
Teorema 2.22 Fie ε0 = 0 si definim
εi = εi−1 + mi−1, i = 1, 2, · · · , k + 1
Presupunem ca matricea C ce defineste baza unilaterala ρjm+Kj=1 are
proprietateaC〈εi+1+1,...,εi+m+1〉 are rangul m (2.58)
pentru fiecare i = 0, 1, . . . , k −m. Atunci exista o baza (Bi)m+Ki=1 pentru S
avınd proprietatile:
Bεi+1, · · · , Bεi+miau suportul ın [xi, xi+m], i = 0, 1, · · · , k −m
Bεi+1, · · · , Bεi+miau suportul ın , [xi, b], i = k −m + 1, · · · , k
Demonstratie. Construim vectorii β1, · · · , βm+K . Pentru i = 0, 1, · · · , k−msi j = 1, 2, · · · ,mi alegem βεi+j sa fie vectorul din Rm+K a carui componentaeste 1, componentele εi+1 + 1, . . . , εi+m+1 fiind δ, unde δ este o solutie arbi-trara a sistemului
C〈εi+1+1,...,εi+m+1〉δ = −C〈εi+j〉

66 Capitolul 1. Clase de functii ın teoria aproximarii
iar restul coeficientilor ramasi fiind zero. Pentru i = k − m + 1, . . . , k sij = 1, 2, . . . ,mi, fie βεi+j un vector din Rm+K ce are componenta εi + jegala cu 1 si toate celelalte componente zero. Din constructie vedem cafunctiile B-spline au proprietatile cerute. In particular, notam ca
Bεi+j = ρεi+j , j = 1, 2, . . . mi, i = k −m + 1, . . . , k.
Mai mult, prin constructie, acesti vectori sınt liniar independenti, si din lemaanterioara obtinem rezultatul cerut. 2
Clasa functiilor spline variationale generalizate
A doua directie de generalizare a functiilor spline se bazeaza pe proprietateafunctiilor spline de a fi solutia unei probleme variationale de minim cu anu-mite restrictii precizate. Aceasta abordare este mai abstracta si are uneleavantaje.
Fie (X, ‖ ‖X) si (Y, ‖ ‖Y ) doua spatiu Banach T : X → Y o aplicatieliniara continua. Presupunem ca U este o submultime a lui X. Formulamurmatoarea problema.
Sa se determine f ın U astfel ca
‖Tf‖Y = min‖Tf‖Y , f ∈ U. (2.59)
Evident aceasta problema este echivalenta cu gasirea unui element y ∈ T (U)astfel ca
‖y‖ = min‖y‖Y , u ∈ T (U) (2.60)
O solutie a problemei (2.59) se numeste functie spline ın U relativ la T .
Este usor de imaginat ca o astfel de problema nu admite solutie pentruX, Y, T, U arbitrare. In anumite ipoteze se arata ca problema (2.59) admitesolutie. Vom caracteriza, ın cele ce urmeaza, functiile spline din U relativ laT .
Teorema 2.23 Fie X spatiul Banach, Y spatiu Hilbert, T : X → Y opera-tor liniar continuu si U ⊂ X o multime convexa.O functie s ∈ U este functie spline relativ la T daca si numai daca
(Ts, Tg)Y ≥ 0 ∀ g ∈ V (s) = f − s, f ∈ U (2.61)

§2. Clasa functiilor spline 67
Demonstratie. Presupunem ca s satisface conditia (2.61). Atunci pentruorice f ∈ U avem
‖Tf‖2Y − ‖Ts‖2
Y = ‖Tf − Ts‖2Y + 2(Ts, Tf − Ts)Y ≥ 0.
Invers, daca s ∈ U si f ∈ U iar g = f − s atunci s + εg ∈ U pentru orice0 ≤ ε ≤ 1. Din
‖Ts‖2Y ≤ ‖Ts + εTg‖2
Y = ‖Ts‖2 + 2ε(Ts, Tg) + ε2‖Tg‖2Y
alergınd pe ε > 0 suficient de mic rezulta (Ts, Tg) ≥ 0 2
Daca X, Y sınt spatii Hilbert atunci avem teorema urmatoare.
Teorema 2.24 O conditie necesara si suficienta ca s ∈ U sa fie functiespline ın U relativ la T este ca x = T ′T (s) sa verifice
(s, x)X = minx∈U
(x, x)X (2.62)
Demonstratie. Daca s verifica (2.62) atunci (s, x)X ≤ (x, x)X pentru oricex ∈ U . Cum x = T ′T (s) avem (T (s), T (s)) ≤ (T (x), T (s)) pentru oricex ∈ U adica s verifica (2.61) deci s este o functie spline ın U relativ la T .Invers, daca s este o functie spline ın U relativ la T atunci s verifica (2.61),de unde (Ts, Tx)Y ≥ (Ts, Ts)Y pentru orice x ∈ U , deci (T ′Ts, x)X ≥(T ′Ts, s)X deci (s, x)X ≤ (x, x)X pentru orice x ∈ U adica (2.62). 2
In ce priveste existenta functiilor spline avem urmatorul rezultat.
Teorema 2.25 Fie X, Y spatii Hilbert, T : X → Y un operator liniar con-tinuu si surjectiv, U ⊂ X o multime convexa ınchisa. Daca U + ker(T ) esteo multime ınchisa, atunci exista cel putin o functie spline ın U relativ la T.
Demonstratie. Fie Ω = T (U). Daca Ω este o multime ınchisa, atunci existay ∈ Ω (unic) astfel ca
‖y‖Y = miny∈Ω
‖y‖Y
(y este proiectia lui 0 pe Ω ın spatiul Y ). Multimea solutiilor este atunciT−1(y) ∩ U care evident este nevida.
Aratam ca Ω = T (U) este ınchisa daca si numai daca U + ker(T ) este omultime ınchisa. Restrictia T a operatorului T la Ker(T )⊥ este un operatorliniar continuu si bijectiv din ker(T )⊥ ın Y . Din teorema aplicatiei deschise,

68 Capitolul 1. Clase de functii ın teoria aproximarii
operatorul T−1 este continuu si T (A) este o multime ınchisa ın Y daca sinumai daca A este o multime ınchisa ın ker(T )⊥. Cum avem
Ω = T((U + ker(T ))∩ ker(T )⊥
)
multimea Ω este ınchisa daca si numai daca U + ker(T ) este ınchisa. 2
Daca x este o functie spline ın U relativa la T atunci y = Tx este solutie aproblemei
‖y‖ = min‖y‖, y ∈ T (U)deci orice alta functie spline x ın U relativa la T verifica T (x) = T (x) = ysi x ∈ U , adica
(x + ker(T )) ∩ U = x.In schema generala, prezentata mai sus, pot fi ıncadrate multe cazuri parti-culare de functii spline. Evident, totul depinde de modulul de definire pentruspatiile X,Y , operatorul T si submultimea U .
Functii spline de interpolare
Fie X,Y, Z spatii Hilbert si T : X → Y , A : X → Z operatori liniari sicontinui. Pentru z ∈ Z consideram multimea
Uz = x ∈ X;A(x) = z = A−1(z).
Definitia 2.9 Functia spline s din Uz relativa la T se numeste functie splinede interpolare ( relativ la T, A si z).
Particularizınd rezultatele de mai sus pentru functiile spline de interpolare(relativ la T, A si z) avem urmatorul rezultat.
Teorema 2.26 Fie X,Y, Z spatii Hilbert si T : X → Y si A : X → Zoperatori liniari continui si sujectivi.
(i) O conditie necesara si suficienta pentru ca s ∈ Uz sa fie functie splinede interpolare (relativ la T, A si z) este ca
(Ts, Tx)Y = 0, pentru orice x ∈ ker(A).
(ii) O conditie necesara si suficienta pentru ca sa existe cel putin o functiespline de interpolare (relativ la T , A si z) pentru orice z ∈ Z este caker(T ) + ker(A) sa fie o multime ınchisa ın X.

§2. Clasa functiilor spline 69
(iii) Daca ker(T )+ker(A) este o multime ınchisa si daca ker(T )∩ker(A) =0, atunci pentru orice z ∈ Z, exista o singura functie spline deinterpolare (relativ la T , A si z ).
Demonstratie. (i). Folosind Teorema 2.23 avem ca s ∈ Uz este functiespline de interpolare (relativ la T , A si z ) daca si numai daca
(Ts, Tf − Ts)Y ≥ 0 ∀ f ∈ Uz = A−1(z).
Cum Uz = s + ker(A), rezulta ca pentru x ∈ ker(A) functia f = s + tx ∈ Uz
si deci t(Ts, Tx) ≥ 0 pentru orice t ∈ R, de unde (Ts, Tx) = 0 pentru oricex ∈ ker(A).
(ii) Daca ker(T ) + ker(A) este o multime ınchisa atunci pentru orice z ∈ Z,ker(T ) + Uz este o multime ınchisa ın X. Intr-adevar, exista xz ∈ X cuA(xz) = z astfel ca Uz = xx + ker(A). Folosind Teorema 2.25, obtinem caexista s o functie spline ın Uz relativ la T , adica o functie spline de interpolare(relativ la T, A si z). Reciproc, daca pentru orice z ∈ Z exista o functie splinede interpolare (relativ la T , A si z ) atunci T (ker(A)) este subspatiu ınchisın Y si deci ker(A) + ker(T ) este o multime ınchisa ın X.
(iii) Pentru fiecare z ∈ Z exista un unic y ∈ Y astfel ca
‖y‖Y = min‖y‖Y , y ∈ T (Uz).Fie s si s ∈ Uz astfel ca T (s) = T (s) = y, deci s − s ∈ ker(T ). Pe de altaparte s− s ∈ ker(A) si din ipoteza s = s. 2
Ca un corolar a punctului (i) din Teorema 2.26 avem urmatoarea caracteri-zare a functiilor spline de interpolare care este deosebit de utila ın aplicatii.
Propozitia 2.4 O conditie necesara si suficienta ca s ∈ Uz sa fie functiespline de interpolare (relativ la T , A si z) este ca sa existe λ ∈ Z astfel ca
T ′T (s) = A′(λ),
unde T ′ si A′ sınt operatori adjuncti pentru T respectiv A.
Demonstratie. Conditia
(Ts, Tx)Y = 0 ∀ x ∈ ker(A)
este echivalenta cu faptul ca (T ′Ts, x)Y = 0 pentru orice x ∈ ker(A), adicaT ′Ts apartine ker(A)⊥. Cum ker(A)⊥ = R(A′) ( Teorema 14.7) ) obtinemca exista λ ∈ Z astfel ca T ′Ts = A′(λ). 2

70 Capitolul 1. Clase de functii ın teoria aproximarii
Definitia 2.10 Subspatiul vectorial S din X a carui elemente verifica relatiade caracterizare din Teorema 2.26(i), adica
S = s ∈ X; (Ts, Tx)Y = 0 ∀ x ∈ ker(A) =
= s ∈ X,T ′Ts ∈ ker(A)⊥ = R(A′)ıl numim spatiul functiilor spline.
Sa consideram, acum, cazul (important ın aplicatii ) unde Z este un spatiude dimensiune finita (aceasta corespunde cazului unde avem un numar finitde conditii de interpolare ).
Presupunem ca Z = Rn (cu produsul scalar euclidian ) si fie ker(T ) dedimensiune m. Ipoteza ker(T ) ∩ ker(A) = 0 implica n ≥ m. In acest cazoperatorul A se poate scrie sub forma
A(x) = [(k1, x)X , · · · , (kn, x)X ] ∈ Rn
unde ki sınt liniar independente ın X (reprezentınd, ın aplicatii, functionaleliniare continue pe X). Este suficient sa luam ki = A′(ei), unde ei ∈ Rn estevectorul ce are 1 pe componenta i si zero ın rest.
Exemplu 5 ( functii spline naturale ).
Fie X = Hm(a, b), Y = H0(a, b), T = Dm(m ≥ 1) si ki ∈ Hm(a, b) astfel ca
(ki, x)m = x(ti), ∀ x ∈ Hm(a, b)
cua < t1 < t2 < ... < tn < b.
Daca n ≥ m, atunci x(ti) = 0, i = 1, . . . , n si x(m)(t) = 0 (x polinom de gradm − 1) implica x(t) = 0. Din Teorema 2.26(iii) daca n ≥ m, functia splineeste unica. In acest caz operatorul A : Hm(a, b) → Z = Rn este definit prin
A(x) = [(k1, x), . . . , (kn, x)] ∈ Rn
iar adjunctul sau are forma
A′(z) =n∑
i=1
ziki daca z = [z1, . . . , zn] ∈ Rn.

§2. Clasa functiilor spline 71
Un element σ ∈ Hm(a, b) apartine multimii
Uz = x ∈ Hm(x);A(x) = z = x ∈ Hm(a, b), x(ti) = zi, i = 1, . . . , n
verifica ∫ b
a(σ(m)(t))2dt = min
x∈Uz
∫ b
a(x(m)(t))2dt
daca si numai daca exista λ = (λ1, · · · , λn) ∈ Rn astfel ca
T ′T (σ) =n∑
i=1
λiki (2.63)
(vezi Propozitia 2.4). Scriind dezvoltarea Taylor a functiei x, cu restul subforma integrala, avem
x(t) ≡ x(a)+(t−a)x′(a)+· · ·+(t− a)m−1
(m− 1)!x(m−1)(a)+
∫ b
a
(t− τ)m−1+
(m− 1)!x(m)(τ)dτ.
Cum T ′T (σ) =n∑
i=1
λiki ∈ ker(T )⊥ = R(T ′) sau explicit
n∑
i=1
λi(ti)j = 0, j = 0, 1, . . . , m− 1. (2.64)
Utilizınd ın dezvoltarea Taylor, ecuatia (2.63) si conditia (2.64), obtinem
(Dm(σ), Dmx)0 = (T ′T (σ), x)m = (n∑
i=1
λiki, x)q =
=n∑
i=1
λix(ti) =∫ b
a
n∑
i=1
λi(ti − τ)m−1+
(m− 1)!x(m)(τ)dτ = (ψ, Dm(x))0
pentru orice x ∈ Hm(a, b) cu
ψ(τ) ≡n∑
i=1
λi(ti − τ)m−1
+
(m− 1)!.
Avem deci D(m)σ = ψ sau ınca
σ(m)(τ) ≡ ψ(τ) ∀ τ ∈ [a, b]. (2.65)

72 Capitolul 1. Clase de functii ın teoria aproximarii
Am obtinut ca o conditie necesara si suficienta ca σ ∈ Uz sa fie functiespline este sa existe constantele λ1, . . . , λn care verifica (2.64) si (2.65). Dinidentitatea
(ti − τ)m−1+ ≡ (−1)m(τ − ti)m−1
+ + (ti − τ)m−1
cum λi verifica (2.64), ecuatia (2.65) este echivalenta cu
σ(m)(τ) ≡ (−1)mn∑
i=1
λi(τ − ti)m−1
(m− 1)!(2.66)
Functia λi(τ − ti)+m−1
(m− 1)!este egala cu λi
(τ − ti)m−1
(m− 1)!pentru τ > ti si nula
pentru τ < ti. Ea are derivate continue pına la ordinul m− 2 si derivata deordinul m−1 are o discontinuitate egala cu λi ın ti. Functia σ ∈ Hm(a, b) estedeci o functie polinomiala de gradul 2m − 1 pe portiuni care se racordeazacu derivatele pına la ordinul 2m− 2 ın nodurile ti.
Expresiile (2.65) si (2.66) arata ca σ(m) = 0 pentru τ > tn si pentru τ < t1.Astfel, σ este un polinom de gradul m − 1 ın intervalele [a, t1) si (tn, b]. Insfırsit avem caracterizarea urmatoare:
O conditie necesara si suficienta pentru ca σ ∈ Hm(a, b) sa fie functie splineeste ca urmatoarele patru conditii sa fie satisfacute:
10 σ este o funtie polinomiala de grad 2m − 1 ın fiecare interval [a, t1],(ti, ti+1), (tn, b], i = 1, . . . , n− 1.
20 σ(j)(ti−) = σ(j)(ti+), j = 0, . . . , 2m− 2, i = 1, . . . , n− 1.
30 σ(j)(t1−) = σ(j)(tn+) = 0, j = m, . . . , 2m− 1.
40 σ(xi) = zi, i = 1, . . . , m.
• Conditia 30 exprima faptul ca σ este un polinom de gradul m−1 ın [a, t1),respectiv (tn, b].
• Multimea functiilor din Hm(a, b) ce verifica conditiile 10, 20 si 30 este unsubspatiu de dimensiune n si este ın fapt spatiul SN 2m−1(∆n).

§2. Clasa functiilor spline 73
Exemplu 6 (functii spline Hermite ).
Luınd X = Hm(a, b), Y = H0(a, b), T = Dm(m ≥ 2) si elementele ki ∈Hm(a, b), k′i ∈ Hm(a, b) astfel ca
(ki, x) = x(ti), pentru x ∈ Hm(a, b), i = 1, . . . , n
(k′i, x) = x′(ti), pentru x ∈ Hm(a, b), i = 1, . . . , n
cua < t1 < t2 < . . . < tn < b
se obtin functiile spline caracterizate astfel.
O conditie necesara si suficienta pentru ca s ∈ Hm(a, b) sa fie functie splinede interpolare (relativ la T,A si z) este ca urmatoarele conditii sa fie satis-facute:
10 s sa fie pe fiecare interval (ti, ti+1), i = 0, . . . , n polinom de grad celmult 2m− 1.
20 s(j)(ti−) = s(j)(ti+), j = 0, . . . , 2m− 3, i = 1, . . . , n.
30 s(j)(t1−) = s(j)(t+n ) = 0, j = m, . . . , 2m− 1
40 s(ti) = zi, s′(ti) = z′i, i = 1, . . . , n.
Exemplu 7 ( functii spline trigonometrice ).
Luınd X = H2(a, b), Y = H0(a, b), T = D2 + I adica T (x) = x′′ + x,ki ∈ H2(a, b) astfel ca (ki, x)2 = x(ti), pentru x ∈ H2(a, b), i = 1, . . . , nobtinem urmatorul rezultat.
O conditie necesara si suficienta pentru ca σ ∈ H2(a, b) sa fie functie splineeste ca urmatoarele patru conditii sa fie satisfacute.
10 σ este o combinatie liniara a functiilor cos(t), sin(t), t cos t, t sin t ınfiecare interval (ti, ti+1), i = 0, . . . , n.
20 σ este o combinatie liniara a functiilor cos t, sin t ın [a, t1), (tn, b].
30 σ(j)(ti−) = σ(j)(ti+), j = 0, 1, 2 si i = 1, . . . , n
40 σ(ti) = zi, i = 2, . . . , n.
Multimea functiilor din H2(a, b) ce verifica 10, 20 si 30 este un spatiu finitdimensional de dimensiune n ( spatiul functiilor trigonometrice ).

74 Capitolul 1. Clase de functii ın teoria aproximarii
Functii spline de ajustare
Fiind dat un element z ∈ Z, se cauta un element σ ∈ X astfel ca
‖Tσ‖2Y + ρ‖A(σ)− z‖2
Z = minx∈X
(‖Tx‖2
Y + ρ‖Ax− z‖2Z
)(2.67)
Un asemenea element se numeste functie spline de ajustare (relativ la T , A,z si ρ > 0).
Teorema 2.27 Fie X, Y, Z spatiu Hilbert T : X → Y , A : X → Z operatoriliniari continui si surjectivi.
1) O conditie necesara si suficienta pentru a exista o functie spline deajustare (relativa la T , A, z si ρ > 0) pentru orice z ∈ Z este caker(T ) + ker(A) sa fie o multime inchisa ın X.
2) Daca ker(T )+ker(A) este o multime ınchis ın X si ker(T )∩ ker(A) =0, atunci pentru orice z ∈ Z si orice ρ > 0 exista o singura functiede ajustare ( relativ la T , A, z si ρ > 0 )
3) O conditie necesara si suficienta ca σ ∈ X sa fie functie spline deajustare ( relativ la T, A, z si ρ > 0) este ca
(Tσ, Tx)Y + ρ(Aσ − z, Ax)Z = 0,
pentru orice x ∈ X.
Demonstratie. 1) Vom rescrie problema de solutionat astfel. Consideramprodusul P = Y ×Z a spatiilor Hilbert Y si Z. Spatiul liniar P cu produsulscalar
(p1, p2)P = (y1, y2)Y + ρ(z1, z2)Z
pentru p1 = [y1, z1] si p2 = [y2, z2], este un spatiu Hilbert ( ρ este un coefi-cient real pozitiv ).
Considerınd L : X → P definit prin
L(x) = [T (x), A(x)] ∈ Y × Z = P,
problema (2.67) revine la a determina σ ∈ X astfel ca
‖L(σ)− p‖P = minx∈X
‖L(x)− p‖P (2.68)

§2. Clasa functiilor spline 75
unde ‖ ‖P este norma pe P generata de produsul scalar ( , )P iar p = [0, z]din P. Notınd cu V = L(X) subspatiul vectorial a lui P = Y × Z problema(2.68) revine la gasirea unui v ∈ V astfel ca
‖v − p‖P = minv∈V
‖v − p‖ (2.69)
cu p = [0, z]. Pentru orice z ∈ Z ecuatia (2.69) are solutie unica daca sinumai daca V este ınchis (se demonstreaza standard ).
Cum V = R(L) rezulta ca V este ınchis daca si numai daca R(L′) este ınchis.
Cum L′(v) = T ′(y) + ρA′(z), daca v = [y, z] ∈ Y × Z = P , rezulta R(L′) =R(T ′) + R(A′) deci V este ınchis daca si numai daca R(T ′) + R(A′) este omultime ınchisa.
In sfırsit R(T ′)+R(A′) este o multime ınchisa daca si numai daca multimeaker(T )+ker(A) este ınchisa. (Am utilizat faptul ca daca X1, X2 sınt subspatiiınchise ın spatiul Hilbert X atunci X1 + X2 este o multime ınchisa daca sinumai daca X⊥
1 + X⊥2 este o multime ınchisa ).
In cazul nostru ker(T ) si ker(A) sınt subspatii ınchise si ker(T )⊥ = R(A′)iar ker(A)⊥ = R(A′). Deci V este ınchis daca si numai daca ker(A)+ker(T )este o multime ınchisa ın X.
2) Am vazut la punctul 1) ca daca ker(A) + ker(T ) este o multime ınchisaatunci exista v ∈ V = R(L) unic astfel ca
‖v − p‖P = minv∈V
‖v − p‖P .
Orice element σ ∈ X astfel ca L(σ) = v este functie spline de ajustare (relativla T,A, z si ρ > 0). Dar ker(L) = ker(T ) ∩ ker(A) deci L este injectiv, deunde unicitatea lui σ.
3) O conditie necesara si suficienta ca v ∈ V sa verifice
‖v − p‖P = minv∈V
‖v − p‖
este ca (v − p, v)P = 0 ∀ v ∈ V adica (Lσ − p, Lx)P = 0 ∀ x ∈ X, care seexpliciteaza astfel
(Tσ, Tx)Y + ρ(Aσ − z,Ax)Z = 0 ∀ x ∈ X
2
Din punctul 3) al teoremei de mai sus se obtine urmatorul rezultat util ınaplicatii.

76 Capitolul 1. Clase de functii ın teoria aproximarii
Propozitia 2.5 O conditie necesara si suficienta ca σ sa fie functie splinede ajustare (relativ la T,A, z si ρ > 0) este ca
T ′T (σ) + ρA′A(σ) = ρA′(z)
sau ıncaL′L(σ) = ρA′(z).
Demonstratia rezulta imediat tinınd seama de forma operatorului L.
De asemenea urmatorul rezultat este util ın aplicatii.
Propozitia 2.6 O conditie necesara si suficienta pentru ca σ sa fie functiespline de ajustare ( relativ la T,A, z si ρ > 0) este sa existe λ ∈ Z astfel ca
T ′T (σ) = A′(λ) si λ = ρ(z −A(σ)).
Demonstratie. Din a doua conditie avem, evident,
A′(λ) = ρ(A′(z)−A′A(σ))
de unde din prima conditie
T ′T (σ) = ρ(A′(σ)−A′A(σ))
adicaT ′T (σ) + ρA′A(σ) = ρA′(σ)
si se utilizeaza Propozitia 2.5. 2
Sa consideram acum exemplul urmator. Exemplu 8 Luam X = Hm(a, b),
Y = H0(a, b), T = Dm(m ≥ 1) si ki ∈ Hm(a, b) astfel ca (ki, x)m = x(ti),pentru x ∈ Hm(a, b) i = 1, . . . , n cua < t1 < · · · < tn < b. Pentru z = (z1, . . . , zn) ∈ Rn si ρ > 0 se puneproblema gasirii unui element σ ∈ Hm(a, b) astfel ca
∫ b
a[σ(m)(t)]2dt + ρ
n∑
i=1
(σ(ti)− zi)2 =
minx∈Hm(a,b)
(∫ b
a(xm(t))2dt + ρ
n∑
i=1
(x(ti)− zi)2).
(2.70)
Aici A(x) = [(k1, x), . . . , (kn, x)] = [x(t1), . . . , x(tn)] ∈ Rn
Din Propozitia 2.6 avem ca exista σ ∈ Hm(a, b) care verifica (2.70) daca sinumai daca exista λ = (λ1, . . . , λn) ∈ Rn astfel ca

§2. Clasa functiilor spline 77
10 T ′T (σ) =n∑
i=1
λiki
20 λi = ρ(zi − σ(ti), i = 1, . . . , n.
Dar am vazut ın exemplul de la functiile spline de interpolare ca primaconditie este echivalenta cu
(i)n∑
i=1
λi(ti)j = 0, j = 0, . . . , m− 1
(ii) σ(m)(t) ≡ (−1)mn∑
i=1
λi(t− ti)m−1
(m− 1)!
ceea ce exprima faptul ca σ ∈ SN 2m−1(∆n).
In plus
λi = (−1)m[σ(2m−1)(ti+)− σ(2m−1)(ti−)], i = 1, . . . , n.
Obtinem deci urmatoare caracterizare a functiei spline.
O conditie necesara si suficienta pentru ca σ ∈ Hm(a, b) sa fie o functiespline de ajustare este ca urmatoarele conditii sa fie verificate:
10 σ este o functie polinomiala de grad 2m− 1 pe fiecare interval [a, t1),(ti, ti+1), i = 1, . . . , n− 1 si (tn, b].
20 σ(j)(ti−) = σj(ti+), j = 0, . . . , 2m− 2, i = 1, . . . , n
30 σ(j)(t1−) = σj(tn+) = 0, j = m, . . . , 2m− 1
40 (−1)m[σ(2m−1)(ti+)− σ(2m−1)(ti−)] = ρ(zi − σ(ti)), i = 1, . . . , n.
Exemplu 9. Luam X = Hm(a, b), Y = H0(a, b), T = Dm(m ≥ 2) si ki,k′i ∈ Hm(a, b) astfel ca (ki, x)m = x(ti), (k′i, x)m = x′(ti), pentru x ∈Hm(a, b) i = 1, . . . , n cu a < t1 < · · · < tn < b. Pentru z = (z1, . . . , zn), z′ =(z′1, . . . , z′n) din ∈ Rn si ρ > 0 se pune problema gasirii unui element

78 Capitolul 1. Clase de functii ın teoria aproximarii
σ ∈ Hm(a, b) astfel ca
∫ b
a[σ(m)(t)]2dt + ρ
n∑
i=1
[(σ(ti)− zi)2 + (σ′(ti)− z′i)2] =
minx∈Hm(a,b)
(∫ b
a(xm(t))2dt + ρ
n∑
i=1
[(x(ti)− zi)2 + (x′(ti)− z′i)2]
).
(2.71)
Din Propozitia 2.6 avem ca exista σ ∈ Hm(a, b) care verifica (2.71) daca sinumai daca exista λ = (λ1, . . . , λn), λ′ = (λ′1, . . . , λ′n) ∈ Rn astfel ca
10 T ′T (σ) =n∑
i=1
λiki +n∑
i=1
λ′iki
20 λi = ρ(zi − σ(ti), λ′i = ρ(z′i − σ′(ti) i = 1, . . . , n.
adica daca si numai daca urmatoarele conditii sınt verificate:
10 σ este o functie polinomiala de grad 2m−1 pe fiecare interval [a, t1), (ti, ti+1),i = 1, . . . , n− 1 si (tn, b].
20 σ(j)(ti−) = σ(j)(ti+), j = 0, . . . , 2m− 3, i = 1, . . . , n
30 σ(j)(t1−) = σ(j)(tn+) = 0, j = m, . . . , 2m− 1
40 (−1)m[σ(2m−1)(ti+)− σ(2m−1)(ti−)] = ρ(zi − σ(ti)), i = 1, . . . , n.
(−1)m−1[σ(2m−2)(ti+)− σ(2m−2)(ti−)] = ρ(z′i − σ′(ti)), i = 1, . . . , n.

Capitolul 2
Metode de interpolare
Un procedeu des utilizat ın aproximarea functiilor este procedeul de interpo-lare. In acest capitol descriem, pentru ınceput, ce se ıntelege prin interpolare,apoi, se analizeaza interpolarea functiilor de o variabila reala sau complexaprin polinoame algebrice, polinoame trigonometrice si prin functii spline, iarın ultima sectiune se fac cıteva consideratii privind interpolarea functiilor demai multe variabile reale.
3 Probleme de interpolare
Pentru a degaja ceea ce vom ıntelege prin interpolare sa consideram pentruınceput cıteva exemple simple.
3.1 Exemple simple de interpolare
Fie ∆n = xini=1 cu a = x1 < . . . < xn = b o diviziune a intervalului [a, b]
si f o functie definita pe [a, b] cu valori reale. Presupunem ca ın modurilexi ale diviziunii ∆n avem informatii privind valorile functiei f si (sau )ale derivatelor sale. Problema care se pune este sa se reconstituie functiaf pe ıntreg intervalul [a, b] din informatiile stiute. Aceasta problema, demare importanta practica, se numeste problema interpolarii. Evident ca nuputem, ın general, sa solutionam exact problema de mai sus.
O solutie aproximativa a acestei probleme consta ın determinarea unei functiidintr-o clasa convenabila, polinom, spline, functie trigonometrica, etc., careın nodurile diviziunii ∆n sa aiba proprietatile functiei f .
Iata cıteva tipuri de probleme de interpolare:
79

80 Capitolul 2. Metode de interpolare
Interpolare Lagrange
Date fiind numele reale y1, · · · , yn sa se determine functia f astfel ıncıt
f(xi) = yi, i = 1, . . . , n.
Interpolare Hermite
Date fiind k1, · · · , kn numere ıntregi nenegative, si (yij), cu j = 0, · · · , ki,i = 1, · · · , n numere reale, sa se determine o functie f ∈ Cp([a, b]) cu p =max(k1, · · · , kn) astfel ca
f (j)(xi) = yij , j = 0, . . . , ki, i = 1, . . . , n
Interpolarea Hermite-Birkhoff
Fiind data o multime E de perechi ordonate de numere naturale (i, j), iluınd valorile 1, . . . , n cel putin o data, iar j ∈ 0, 1, . . . , m, valoarea j = mfiind luata cel putin o data.
Presupunem ca fiecarei perechi (i, j) ∈ E ıi este asociat un numar yij . Prob-lema de interpolare Hermite-Birkhoff consta ın determinarea unei functiif ∈ Cm([a, b]) astfel ıncıt
f (j)(xi) = yij , (i, j) ∈ E.
3.2 O schema de interpolare abstracta
Exemplele discutate mai sus, ca si multe alte procedee de interpolare, seıncadreaza ın urmatoarea schema abstracta:
Se considera un spatiu de functii, X, f1, . . . , fn elemente fixate ın Xiar λ1, . . . , λn functionale liniare pe spatiul X. Pentru un element gdin X se cauta un element Pg de forma
∑nj=1 αjfj astfel ca:
λi(Pg) = λi(g), i = 1, . . . , n.
Problema de aproximare, de mai sus, nu depinde de elementele individualef1, . . . , fn, nici de conditiile individuale de interpolare λ1, . . . , λn, ci doar de

§3. Probleme de interpolare 81
acoperirea liniara
F := spf1, . . . , fn = n∑
j=1
αjfj ;α = (α1, . . . , αn) ∈ Rn
a functiilor f1, . . . , fn si de acoperirea liniara
Λ := spλ1, . . . , λn = n∑
i=1
βiλi : (β1, . . . , βn) ∈ Rn
a conditiilor de interpolare. Acest fapt este evident, deoarece am cerutexplicit aproximarea cu elemente din F . Dar, de asemenea,
λi(g) = λi(h), i = 1, . . . , n
daca si numai daca
n∑
i=1
βiλi(g) =n∑
i=1
βiλi(h), ∀ β = (β1, . . . , βn) ∈ Rn.
Putem, prin urmare, sa formulam problema de interpolare liniara astfel:
Pentru un g ∈ X dat, sa se gaseasca un f ∈ F astfel ca
λ(f) = λ(g), ∀λ ∈ Λ.
Spunem ca problema de interpolare liniara, data de F si Λ, este corectadaca ea are exact o solutie pentru orice g din X. Vom da, ın continuare, unrezultat central privind corectitudinea si aproximarea numerica a problemeide interpolare liniara.
Teorema 3.1 Fie f1, . . . , fm o baza pentru spatiul F si fie λ1, . . . , λn obaza pentru Λ.
i) Problema de interpolare liniara data de F si Λ este corecta daca sinumai daca matricea Gram
A :=(λi(fj)
)n,m
i=1,j=1(3.1)
este inversabila. In particular, n = m este o conditie necesara ( darnu suficienta ) pentru corectitudinea problemei de interpolare liniara.

82 Capitolul 2. Metode de interpolare
ii) Daca problema de interpolare liniara data de F si Λ este corecta, atunciinterpolantul Pg poate fi construit ca
Pg =n∑
j=1
αjfj cu α = A−1(λ1(g), . . . , λn(g))T .
Demonstratie. Deoarece λ1, · · · , λn este o baza pentru Λ avem ca f =α1f1+· · ·+αmfm este o solutie pentru problema de interpolare liniara pentruun g din E daca si numai daca
λi(m∑
j=1
αjfj) = λi(g) ∀ i = 1, . . . , n
adica, daca si numai daca
λ1(f1) λ1(f2) · · · λ1(fm)λ2(f2) λ2(f2) · · · λ2(fm)
......
...λn(f1) λn(f2) · · · λn(fm)
·
α1
α2...αm
=
λ1(g)λ2(g)...λn(g)
Inversabilitatea matricei Gram A = λi(fj))i=1,···n,j=1,···,m asigura existentaunei singure solutii α = (α1 · · ·αm)T , deci exact a unui element f din F .Presupunem, pentru reciproca, ca A nu este inversabila. Daca m ≤ n,aceasta ınseamna existenta unui vector nenul α ∈ Rm astfel ca Aα = 0.Dar atunci, deoarece f1, · · · , fm este o baza pentru F , rezulta ca functiaf = α1f1 + · · · + αmfm din F este diferita de zero, adica problema deinterpolare pentru functia g = 0 are mai mult de o solutie. Daca m > natunci exista un vector nenul β ∈ Rn astfel ca βT A = 0T . Dar atunci,λ1, · · · , λn fiind o baza pentru Λ, elementul λ = β1λ1 + · · · + βmλm estediferit de zero, dar se anuleaza pe orice fj , j = 1, . . . , m, deci avem λ(f) = 0pentru orice f ∈ F . Pe de alta parte, λ fiind nenul, exista functia g ∈ Epentru care λ(g) 6= 0. Problema de interpolare pentru g nu are solutie,deoarece λ(g) 6= 0 = λ(f) pentru orice f ∈ F. 2
Corectitudinea problemei de interpolare liniara depinde de F si Λ, precumsi de spatiul de functii E din care face parte F si de elementele g pe caredorim sa le interpolam. Odata ce am stabilit corectitudinea problemei deinterpolare liniare, trebuie sa indicam o cale (metoda ) pentru evaluareaconditiilor de interpolare λ1, · · · , λn pe functia g pentru a obtine elementulde interpolare din F .

§4. Interpolare prin polinoame 83
4 Interpolare prin polinoame
In interpolarea functiilor ıntr-o variabila reala sau complexa un rol central ıljoaca interpolarea prin polinoame algebrice si prin polinoame trigonometrice.
4.1 Interpolarea prin polinoame algebrice
In interpolarea cu polinoame, teorema urmatoare ( dupa unii autori teoremafundamentala a interpolarii ) este esentiala.
Teorema 4.1 Fie x1, . . . , xm, m numere complexe distincte doua cıte doua,k1, . . . , km numere ıntregi nenegative; (y1,0, . . . y1,k1 ; . . . ; ym,0, . . . ym,km)n numere complexe, unde n = k1 + · · ·+ km + m. Exista un polinom unic Pastfel ca:
1) gradul lui P ≤ n− 1;
2) P (j)(xi) = yi,j cınd j = 0, . . . ki iar i = 1, . . . , m.
Demonstratie. Multimea V a polinoamelor cu coeficienti complecsi avındgradul ≤ n − 1 este un C− spatiu vectorial de dimensiune n, si pentrucare polinoamele 1, x, . . . , xn−1 formeaza o baza. Multimea W a tuturor sis-temelor de numere complexe (y1,0, . . . y1,k1 ; . . . ; ym,0, . . . ym,km) este unC− spatiu vectorial de dimensiune
(k1 + 1) + · · ·+ (kn + 1) = k1 + . . . + km + m = n.
Consideram aplicatia ϕ : V → W definita prin
ϕ(P ) = (P (0)(x1), . . . , P (k1)(x1), . . . , P (0)(xm), . . . , P (km)(xm)).
Aceasta aplicatie este, evident, C-liniara. Teorema va fi demonstrata dacavom arata ca ϕ este bijectiva. Cum dim(V ) = dim(W ) = n, este suficientsa aratam ca ϕ este injectiva, deci ca din ϕ(P ) = 0 rezulta P = 0. Dar,ϕ(P ) = 0 implica P (x1) = P ′(x1) = · · · = P (k1)(x1) = 0, deci P este di-vizibil cu polinomul (x − x1)k1+1. Analog P este divizibil cu polinoamele(x − x2)k2+1, . . . , (x − xm)km+1. Cum x1, . . . , xm sınt numere complexediferite doua cıte doua, rezulta ca (x− x1)k1+1, . . . , (x− xm)km+1 sınt poli-noame prime ıntre ele, deci P este divizibil cu polinomul
ω(x) =m∏
i=1
(x− xi)ki+1 (4.1)

84 Capitolul 2. Metode de interpolare
Acest produs are gradul n =m∑
i=1
(ki +1), pe cınd P are gradul cel mult n−1,
deci nu ramıne decıt P = 0, ceea ce trebuie demonstrat. 2
Putem sa dam si o demonstratie constructiva pentru teorema de mai sus.Se observam pentru ınceput ca daca un asemenea polinom exista el esteunic. Fie f1, . . . , fn functiile polinomiale definite prin fi(x) = xi−1 si λij
functionalele liniare pe un spatiu de functii X ce contine f1, . . . , fn, definiteprin
λij(f) = f (j)(xi), j = 0, . . . , ki, i = 1, . . . , m; ∀f ∈ X.
Teorema este demonstrata daca aratam ca exista P =∑n
i=1 αifi astfel ca
λij(P ) = yi,j , j = 0, . . . , ki, i = 1, . . . , m.
Este suficient, conform Teoremei 3.1 sa demonstram ca matriceaA = (λij(fk)) este inversabila.
Daca k1 = · · · = kn = 0 determinantul matricei A este un determinantVandermonde, iar pentru cazul general este un determinant Vandermondegeneralizat.
Observatii.
1. Daca toate punctele x1, . . . xm sınt reale si yi,j sınt, la fel, numerele reale,atunci polinomul P din teorema este cu coeficienti reali.
Intr-adevar, daca
P (x) =n−1∑
k=0
akxk si P1(x) =
n−1∑
k=0
(Reak)xk
avem P(j)1 (xi) = Re(P (j)(xi)) = Re(yi,j) = yi,j deci, cum P este unic, rezulta
P = P1.2. Forma generala a unui polinom Q ( de grad oarecare ) pentru care
Q(j)(xi) = yi,j , j = 0, . . . , ki, i = 1, . . . , m (4.2)
esteQ(x) = P (x) + ω(x)R(x) (4.3)
unde P este polinomul din enuntul teoremei fundamentale, ω este dat de(4.1), iar R este un polinom arbitrar.

§4. Interpolare prin polinoame 85
Intr-adevar, orice asemenea polinom verifica relatiile (4.2), iar daca Q esteun polinom care verifica relatiile (4.3) atunci Q−P verifica relatii analoage,ınsa cu 0 ın loc de y1,0, . . . , ym,km . Dupa cum a rezultat ın demonstratiateoremei fundamentale, un asemenea polinom se divide cu ω.
3. Polinomul P , din enuntul teoremei fundamentale, se obtine ca rest alımpartirii prin ω a unui polinom oarecare ce satisface (4.2).
4. Problema de interpolare Lagrange si problema de interpolare Hermiteadmit solutii unice, iar problema de interpolare Hermite-Birkhoff admite osolutie care ın general nu este unica.
Intr-adevar, pentru a vedea acest lucru putem observa ca o problema deinterpolare Birkhoff poate fi transformata ıntr-o problema de interpolareHermite ınlocuind yi,j care nu sınt prescrise cu valori arbitrare ( de exemplucu zero ).
Polinom de interpolare asociat unei functii
Numerele y1,0 . . . , ym,km care determina polinomul P de interpolare pot ficonsiderate ca valorile unei functii sau a derivatelor sale pe multimeax1, . . . , xm. Fie t1, . . . , tn puncte nu neaparat distincte. Presupunem ca n1
dintre aceste numere sınt egale cu x1, n2 dintre ele sınt egale cu x2, . . . , nm
dintre ele sınt egale cu xm (punctele x1, . . . xm fiind distincte doua cıte doua)si ca n1 + · · ·+ nm = n.
Definitia 4.1 Se numeste polinom de interpolare pentru functia f cu nodurilet1, . . . , tn polinomul P avınd proprietatile:
1) gradul lui P este mai mic sau egal cu n− 1;
2) P (j)(xi) = f (j)(xi), j = 0, . . . ni − 1, i = 1, . . . , m.
Existenta si unicitatea polinomului de interpolare pentru functia f pe nodurilet1, . . . , tn este asigurata de teorema fundamentala a interpolarii ( Teorema4.1) luınd ki = ni − 1, yij = f (j)(xi), j = 0, . . . , ki, i = 1, . . . , m.
Vom nota acest polinom, ın cele ce urmeaza, cu P (f ; t1, . . . , tn; x).
Forme ale polinomului de interpolare
Exista diferite forme de reprezentare ale unui polinom de interpolare.

86 Capitolul 2. Metode de interpolare
Teorema 4.2 Polinomul de interpolare P , dat de Definitia 4.1, se poatereprezenta ca fiind cıtul a doi determinanti, si anume:
P (x) =
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
f(0)1 (x1) · · · f
(0)n (x1) y1,0
......
...f
(k1)1 (x1) · · · f
(k1)n (x1) y1,k1
......
...f
(0)1 (xm) · · · f
(0)n (xm) ym,0
......
...f
(km)1 (xm) · · · f
(km)n (xm) ym,km
f1(x) · · · fn(x) 0
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
: V
unde fi(x) = xi−1, i = 1, . . . , n iar V este determinantul
V =
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
f(0)1 (x1) · · · f
(0)n (x1)
......
f(k1)1 (x1) · · · f
(k1)n (x1)
......
f(0)1 (xm) · · · f
(0)n (xm)
......
f(km)1 (xm) · · · f
(km)n (xm)
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
Demonstratie. Fie P (x) =∑n
j=1 αjxj−1 =
∑nj=1 αjfj(x) polinomul de
interpolare cautat. Conditiile de interpolare devin
n∑
k=1
αkf(j)k (xi) = yij , j = 0, . . . , ki, i = 1, . . . , m (4.4)
adica (α1, . . . , αn) se determina din rezolvarea sistemului de n ecuatii cu nnecunoscute de mai sus. Daca mai adaugam la acest sistem ecuatia
n∑
k=1
αkfk(x) = P (x)
atunci conditia de compatibilitate pentru existenta parametrilor α = (α1, . . . , αn)se scrie

§4. Interpolare prin polinoame 87
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
f(0)1 (x1) · · · f
(0)n (x1) y1,0
......
...f
(k1)1 (x1) · · · f
(k1)n (x1) y1,k1
......
...f
(0)1 (xm) · · · f
(0)n (xm) ym,0
......
...f
(km)1 (xm) · · · f
(km)n (x1) ym,km
f1(x) · · · fn(x) P (x)
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
= 0
de unde se obtine forma ceruta, daca scriem ultima coloana ın determinantulde mai sus sub forma:
(y1,0 . . . , y1,k1 ; . . . ; ym,0 . . . , ym,km , P (x))T =
(y1,0 . . . , y1,k1 ; . . . ; ym,0 . . . , ym,km , 0)T + (0 . . . , 0; . . . ; 0 . . . , 0, P (x))T .
2
Rezolvınd sistemul (4.4) se obtin coeficientii (α1, . . . , αn) cu care se reprezintapolinomul P de interpolare.
Forma Lagrange a polinomului de interpolare
Daca x1, . . . , xm sınt puncte distincte doua cıte doua, atunci polinoamele
Li(x) =(x− x1) · · · (x− xi−1)(x− xi+1) · · · (x− xm)(xi − x1) · · · (xi − xi−1)(xi − xi+1) · · · (xi − xm)
au proprietatileLi(xj) = δij , ∀i, j ∈ 1, . . . ,m
iar polinomul
P (x) =m∑
i=1
yi(x− x1) · · · (x− xi−1)(x− xi+1) · · · (x− xm)
xi − x1) · · · (xi − xi−1)(xi − xi+1) · · · (xi − xm)=
m∑
i=1
yiLi(x)
este solutie a problemei de interpolare Lagrange.

88 Capitolul 2. Metode de interpolare
Forma Hermite a polinomului de interpolare
Propozitia urmatoare da o alta expresie a polinomului P din teorema fun-damentala.
Teorema 4.3 Polinomul P de grad cel mult n−1 care satisface relatiile dinteorema fundamentala este dat de urmatoarea formula a lui Hermite:
P (x) =m∑
i=1
ω(x)(x− xi)ki+1
[ ki∑
j=0
yij(x− xi)j
j!×
×(ki−j∑
k=0
(x− xi)k
k!
((x− xi)ki+1
ω(x)
)(k)
x=xi
)] (4.5)
unde ω(x) =m∏
i=1
(x− xi)ki+1.
Demonstratie. Fie Lij polinomul de grad n− 1 care satisface
L(k)ij (xs) = δisδjk pentru orice s ∈ 1, . . . ,m, k ∈ 0, 1, . . . , ks.
Evident
P (x) =m∑
i=1
ki∑
j=0
yi,jLi,j(x). (4.6)
Pentru a determina pe Li,j observam ca
Li,j(x) =ω(x)
(x− xi)ki+1(x− xi)jR(x)
unde R are gradul mai mic sau egal cu ki−j = n−1−(gradul (ω)+j−(ki+1)).Vom cauta pe R de forma
R(x) =ki−j∑
k=0
bj(x− xi)k.
Sa observam ca
R(x)ω(x)(x− xi)ki+1
=Lij(x)
(x− xi)j=
1j!
+ c(x− xi)ki+1−j + · · ·

§4. Interpolare prin polinoame 89
daca dezvoltam pe Lij ın jurul lui x = xi cu ajutorul seriei Taylor. Deci
R(x)− 1j!
(x− xi)ki+1
ω(x)=
1ω(x)/(x− xi)ki+1
[c(x− xi)ki+1−j + · · ·
](4.7)
Polinomul ω(x)/(x− xi)ki+1 nu se divide cu x − xi, deci dezvoltarea prinTaylor, ın jurul lui xi, este de forma d1 + d2(x − xi) + · · · cu d1 6= 0. Cumgradul polinomului R ≤ ki − j si cum dezvoltarea prin Taylor a membruluidrept ın (4.7) ıncepe cu cd−1
1 (x−xi)ki−j+1, rezulta ca R(x) coincide cu suma
termenilor din dezvoltarea Taylor a lui1j!
(x− xi)ki+1
ω(x)ın jurul lui xi de la
cel de gradul 0 pına la cel de gradul ki − j, adica
R(x) =1j!
ki−j∑
k=0
(x− xi)k
k!
((x− xi)ki+1
ω(x)
)(k)
x=xi
de unde obtinem
Lij(x) =ω(x)
(x− xi)ki+1· 1j!
(x− xi)jki−j∑
k=0
1k!
(x− xi)k((x− xi)ki+1
ω(x)
)(k)
x=xi
Introducınd forma lui Li,j ın (4.6) se obtine formula lui Hermite (4.5). 2
In cazul formulei lui Hermite luınd k1 = . . . = km = 0 obtinem
P (x) =m∑
i=1
ω(x)x− xi
yi,0
(x− xi
ω(x)
)x=xi
adica
P (x) =m∑
i=1
yi(x− x1) · · · (x− xi−1)(x− xi+1) · · · (x− xm)
(xi − x1) · · · (xi − xi−1)(xi − xi+1) · · · (xi − xm)=
m∑
i=1
yiLi(x)
unde
Li(x) =ωi(x)ω′(xi)
· 1x− xi
=(x− x1) · · · (x− xi−1)(x− xi+1) · · · (x− xm)
(xi − x1) · · · (xi − xi−1)(xi − xi+1) · · · (xi − xm)
Forma Newton a polinomului de interpolare
Cu ajutorul polinomului de interpolare atasat unei functii f putem definidiferentele divizate pentru functia f .

90 Capitolul 2. Metode de interpolare
Definitia 4.2 Diferenta divizata de ordinul k pentru functia f cu nodurilexi, . . . , xi+k este coeficientul lui xk din polinomul de interpolare asociat functieif, P (f ; xi, . . . , xi+k;x) si se noteaza prin [xi, . . . , xi+k]f, fie prin f [xi, . . . , xi+k].
Denumirea de diferenta divizata este justificata de proprietatile urmatoare.
Teorema 4.4
Polinoamele de interpolare si diferentele divizate satisfac urmatoarea relatiede recurenta
P (f ; x1, · · · , xn; x) =
= P (f ;x1, . . . , xn−1; x) + (x− x1) . . . (x− xn−1)[x1, · · · , xn]f.
Demonstratie. Din definitia polinomului de interpolare rezulta ca
P (f ; x1, . . . , xn;x)− P (f ; x1, . . . , xn−1; x) = 0 daca x ∈ x1, . . . , xn−1deci P (f ;x1, . . . , xn; x) − P (f ;x1, . . . , xn−1;x) = C(x − x1) · · · (x − xn−1).Cum coeficientul lui xn−1 ın stınga este [x1, . . . , xn]f iar ın dreapta C rezultaC = [x1, . . . xn]f. 2
Din teorema de mai sus obtinem forma Newton a polinomului de interpolarepentru f si anume
P (f ;x1, . . . , xn; x) = [x1]f + (x− x1)[x1, x2]f + · · ·+
+(x− x1) · · · (x− xn−1)[x1, . . . , xn]f.(4.8)
Aceasta forma a polinomului de interpolare, se vede usor ca este practica,deoarece daca se mai adauga un punct de interpolare (conditie de inter-polare) la polinomul deja obtinut se mai adauga un termen, pe cınd dacautilizam forma Lagrange sau forma Hermite a polinomului de interpolare estenecesar sa reluam calculele de la ınceput. Sa evaluam numarul de operatiinecesare pentru polinomul de interpolare sub forma Lagrange si apoi subforma Newton. Vom nota cu A o adunare sau o scadere, prin I o ınmultiresau ımpartire. Atunci pentru evaluarea lui Li ıntr-un punct x sınt necesare(2m− 2)A + (2m− 3)I si apoi (m− 1)A + mI pentru formarea polinomuluiP din yi si Li(x). Deci ın total sınt necesare
(2m2 + m− 1)A + (2m2 − 2m)I
comparabila cu (2m − 2)A + (m − 1)I necesare pentru evaluarea aceluiasipolinom de interpolare dar scris sub forma Newton.

§4. Interpolare prin polinoame 91
Proprietati ale diferentelor divizate
Pentru a face efectiva forma Newton a polinomului de interpolare vom daacum cıteva proprietati ale diferentelor divizate.
Propozitia 4.1
1) [xi, . . . , xi+k]f este functie simetrica ın argumentele xi, . . . , xi+k; adica,diferenta divizata depinde numai de multimea nodurilor xi, . . . , xi+k sinu de ordinea ın care apar.
2) [xi, . . . , xi+k]f este liniara ın f , adica daca f = αg + h unde g si hsınt functii iar α o constanta atunci
[xi, . . . , xi+k](αg + h) = α[xi, . . . , xi+k]g + [xi, . . . , xi+k]h
3) Daca f este un polinom avınd gradul ≤ k atunci [xi, . . . , xi+k]f esteo constanta ın raport cu xi, . . . , xi+k. In particular, [xi, . . . xi+k]f = 0pentru orice f ∈ Pk−1.
4) Daca f este o functie de clasa Ck atunci exista un punct ξ ın cel maimic interval care contine punctele xi, . . . , xi+k astfel ca
[xi, . . . , xi+k]f = f (k)(ξ)/k!
5) [xi, . . . , xi+k]f = f (k)(xi)/k! daca xi = xi+1 = . . . = xi+k si f este declasa Ck si [xi, . . . , xi+k]f =
=[xi, . . . , xr−1, xr+1, . . . , xi+k]f − [xi, . . . xs−1, xs+1, . . . , xi+k]f
xs − xr
daca xr, xs sınt doua puncte distincte ın sirul xi, . . . , xi+k.
6) Are loc urmatoare formula de tip Leibnitz
[xi, . . . , xi+k](gh) =i+k∑
r=i
([xi, . . . , xr]g)([xr, . . . , xi+k]h)
7) Daca f este o functie de clasa Ck atunci
(xi, . . . , xi+k) → [xi, . . . , xi+k]f
este o functie continua ın cele k + 1 argumente.

92 Capitolul 2. Metode de interpolare
Demonstratie. Punctele 1), 2), 3) rezulta imediat din definitia diferenteidivizate. Intr-adevar, polinomul de interpolare pentru functia f pe nodurilexi, . . . , xi+k depinde numai de punctele xi, . . . xi+k si nu depinde de ordineaın care aceste puncte sınt scrise. Punctul 2) rezulta din unicitatea polino-mului de interpolare, iar punctul 3) din faptul ca polinomul de interpolarede ordinul k pentru un polinom f cu gradul ≤ k este polinomul ınsusi, decicoeficientul lui xk este constant.
4) Fie P (x) = P (f ;xi, . . . , xi+k; x). Avem P (k)(x) = k![xi, . . . , xi+k]f . Tre-buie aratat, deci, ca exista ξ ∈ (a, b) astfel ca g(k)(ξ) = 0, unde g(x) =f(x)−P (x), iar [a, b] = coxi, . . . , xi+k este acoperirea convexa a punctelorxi, . . . , xi+k. Dar g se anuleaza ın xi, . . . xi+k conform definitiei lui P (ın aceixj a caror valori se repeta de r ori ın sirul xi, . . . , xi+k avem g(r−1)(xj) = 0).Existenta unui ξ ın care g(k)(ξ) = 0 rezulta din teorema lui Rolle.
5) Fie P (x) = P (f ; xi, · · · , xi+k;x), care este un polinom de grad cel mult k.Daca xi = . . . = xi+k, aplicınd dezvoltarea ın serie Taylor pentru P avem
P (x) = P (xi) +x− xi
1!P ′(xi) + · · ·+ (x− xi)k
k!P (k)(xi).
Dar P (xi) = f(xi), . . . , P (k)(xi) = f (k)(xi) conform definitiei lui P , iar[xi, . . . , xi+k]f este coeficientul lui xk ın P , adica
1k!
P (k)(xi) =1k!
f (k)(xi).
Cum diferentele divizate depind numai de multimea nodurilor xi, . . . , xi+ksi nu de ordinea lor, putem considera xr = xi si xs = xi+k. Folosind Teorema4.4 avem
P (f ; xi, . . . , xi+k; x) =
= P (f ;xi, . . . , xi+k−1;x) + (x− xi) · · · (x− xi+k−1)[xi, . . . , xi+k]f =
= P (f ;xi+1, . . . , xi+k−1, xi;x) + (x− xi) · · · (x− xi+k−1)[xi, . . . xi+k]f =
= P (f ; xi+1, . . . , xi+k−1; x)+(x−xi+1) · · · (x−xi+k−1)[xi+1, . . . , xi+k−1, xi]f+
+(x− xi) · · · (x− xi+k−1)[xi, . . . , xi+k]f
si pe de alta parte
P (f ;xi, . . . , xi+k; x) = P (f ; xi+1, . . . , xi+k, xi;x) =
P (f ; xi+1, . . . xi+k−1, xi+k;x)+(x−xi+1) · · · (x−xi+k)[xi+1, . . . , xi+k, xi]f =

§4. Interpolare prin polinoame 93
P (f ; xi+1, . . . xi+k−1; x) + (x− xi+1) · · · (x− xi+k−1)[xi+1, . . . , xi+k]f+
+(x− xi+1) · · · (x− xi+k−1(x− xi+k)[xi+1, . . . xi+k, xi]f.
Daca egalam cele doua expresii, reducem pe P (f, xi+1, . . . xi+k−1; x) si apoisimplificam cu (x− xi+1) · · · (x− xi+k−1), obtinem tinınd seama de simetriadiferentelor divizate
[xi, . . . , xi+k−1]f + (x− xi) · [xi, . . . , xi+k−1, xi+k]f =
= [xi+1, . . . , xi+k−1 , xi+k]f + (x− xi+k) · [xi, . . . , xi+k−1, xi+k]f
de unde rezulta imediat formula dorita.
6) Fie Q(x) = P (g; xi, . . . xi+k; x), R(x) = P (h; xi, . . . , xi+k; x) siS(x) = R(x)Q(x). Avem
S(j)(xr) =j∑
s=0
Csj Q
(s)(xr)R(j−s)(xr) =j∑
s=0
Csj g
(s)(xr)h(j−s)(xr) = (gh)(j)(xr)
pentru orice r ∈ i, i + 1, . . . , i + k, ∀ j ∈ 0, . . . , ki− 1. Prin ımpartirealui S la ω(x) =
∏i+kr=i(x− xr) obtinem
S(x) = C(x)ω(x) + P (x)
unde C si P sınt polinoame cu coeficienti reali ın x iar gradul lui P este maimic sau egal cu k. Cum ω(j)(xr) = 0 si S(j)(xr) = (gh)(j)(xr)j ∈ 0, . . . , ki − 1, r ∈ i, . . . i + k, obtinem P (j)(xr) = (gh)(j)(xr) pentruj ∈ 0, . . . , ki−1, r ∈ i, . . . , i+m deci P (x) = P (gh; xi, . . . , xi+k; x). Dar
S(x) =(i+k∑
r=i
(x− xi) . . . (x− xr−1)[xi, . . . , xr]g)×
(i+k∑
s=i
(x− xs+1) · · · (x− xi+k)[xs+1, . . . , xi+k]h).
Daca r > s atunci (x−xi) · · · (x−xr−1)(x−xs+1) · · · (x−xi+k) se divide cuω(x), iar daca r ≤ s atunci gradul lui
(x− xi) · · · (x− xr−1)(x− xs+1) · · · (x− xi+k)
este mai mic sau egal cu k si deci
P (x) =∑
i≤r≤s≤i+k
(x− xi) · · · (x− xr−1)(x− xs+1) · · · (x− xi+k) × · · ·

94 Capitolul 2. Metode de interpolare
unde· · · = ([xi, . . . , xr]g) · ([xs, . . . , xi+k]h).
Ramıne sa demonstram ca gradul lui
(x− xi) · · · (x− xr−1)(x− xs+1) · · · (x− xi+k)
este egal cu k daca si numai daca r = s si atunci coeficientul lui xk este
i+k∑
r=i
([xi, . . . xr]g)([xr, . . . xi+r]h)
iar pe de alta parte acelasi coeficient este [xi, . . . , xi+k]f.
7. a) Functia (xi, . . . , xi+k)−→[xi, . . . , xi+k]f este continua ın orice punct deforma (x0, . . . , x0), deoarece, conform punctului 5)
limxi→x0,xi+k→x0
[xi, . . . xi+k]f = limxi→x0,xi+k→x0
f (k)(ξ)k!
,
unde minxi, . . . , xi+k ≤ ξ ≤ maxxi, . . . , xi+k Functia f (k) fiindcontinua, limita de mai sus da
f (k)(x0)k!
= [x0, . . . , x0]f.
b) Demonstram acum asertiunea prin inductie fata de k. Pentru k = 0asertiunea este imediata deoarece [xi]f = f(xi) si totul revine la continui-tatea lui f . Pentru k oarecare este suficient de dovedit ca [xi, . . . , xi+k]f estecontinua ın orice punct ın care nu are loc relatia xi = xi+1 = . . . = xi+k.Cum [xi, . . . , xi+k]f depinde simetric de argumentele sale, este suficient dedovedit aceasta ın cazul xi 6= xi+k. Dar ın acest caz
[xi, . . . , xi+k]f =[xi+1, . . . , xi+k]f − [xi, . . . , xi+k−1]f
xi+k − xi
si deci presupunınd asertiunea adevarata pentru k− 1, rezulta continuitateapentru [xi, . . . , xi+k]f ın orice punct ın care xi 6= xi+k. 2
Observatie. Daca membrul drept are sens, avem
d
dx[x1, . . . , xn, x]f = [x1, . . . xn, x, x]f.

§4. Interpolare prin polinoame 95
Intr-adevar,
d
dx[x1, . . . , xn, x]f = lim
y→x
[x1, . . . , xn, y]f − [x1, . . . , xn, x]fy − x
=
= limy→x
[x, x1, . . . , xn, y]f = [x, x1, . . . , xn, x]f = [x1, . . . , xn, x, x]f.
Propozitia 4.2 Daca f este o functie de clasa Cn atunci :
[x1, . . . , xn]f =∫ 1
0dt1
∫ t1
0dt2 · · ·
∫ tn−2
0· · ·dtn−1 (4.9)
unde
· · · = f (n−1)(x1 + t1(x2 − x1) + · · ·+ tn−1(xn − xn−1)).
Demonstratie. Pentru n = 1, formula (4.9) se reduce la
[x1]f =∫ 1
0f(x1)dt1 = f(x1).
Presupunınd ca formula este adevarata pentru n = k, utilizınd formula derecurenta a diferentelor divizate obtinem ca formula (4.9) este adevarata sipentru n = k + 1, fiindca
∫ 1
0dt1
∫ t1
0dt2 . . .
∫ tk−1
0f (k)(x1 + t1(x2 − x1) + · · ·+ tk(xk+1 − xk))dtk =
=∫ 1
0dt1
∫ t1
0dt2 · · ·
∫ tk−1
0
1xk+1 − xk
d
dtk· · ·dtk =
=∫ 1
0dt1
∫ t1
0dt2 · · ·
∫ tk−2
0
1xk+1 − xk
ϕ(tk−1)dtk−1
unde· · · = f (k−1)(x1 + t1(x2 − x1) · · · tk(xk+1 − xk))
iar ϕ(tk−1) este egal cu
f (k−1)(x1 + t1(x2 − x1) + · · ·+ tk−1(xk − xk−1) + tk−1(xk+1 − xk))−
−f (k−1)(x1 + t1(x2 − x1) + · · ·+ tk−1(xk − xk−1)) =
f (k−1)(x1 + t1(x2 − x1) + · · ·+ tk−1(xk+1 − xk−1))−
−f (k−1)(x1 + t1(x2 − x1) + · · ·+ tk−1(xk − xk−1))

96 Capitolul 2. Metode de interpolare
deci ∫ 1
0dt1
∫ t1
0dt2 . . .
∫ tk−2
0
ϕ(tk−1)xk+1 − xk
dtk−1 =
=[x1, . . . , xk−2, xk+1]f − [x1, . . . , xk−1, xk]f
xk+1 − xk= [x1, . . . , xk, xk+1]f.
2
Forma restului
Vom analiza acum restul polinomului de interpolare asociat unei functii f .
Teorema 4.5 Fie x1, . . . , xm puncte distincte din [a, b], iar α1, . . . , αm
numere ıntregi strict pozitive.Daca f ∈ Cn([a, b]), unde n = α1 + · · · + αm, iar p este polinomul deinterpolare pe nodurile
x1, . . . , x1︸ ︷︷ ︸α1
, . . . , xm, . . . , xm︸ ︷︷ ︸αm
asociat functiei f ( f (j)(xi) = p(j)(xi), j = 0, . . . αi − 1, i = 1, . . . , m) atuncipentru orice x ∈ [a, b] exista
ξx ∈ cox, x1, . . . , xm
astfel ıncıt
f(x)− p(x) =1n!
ω(x) · f (n)(ξx) (4.10)
undeω(x) = (x− x1)α1 · · · (x− xm)αm
Demonstratie. Daca x = xi relatia (4.10) este evident verificata. Pre-supunem x 6∈ x1, · · · , xm si consideram polinomul ın t de grad n definitprin
q(t) = p(t) +f(x)− p(x)
ω(x)· ω(t).
Pentru orice i ∈ 1, . . . , m si j ∈ 0, . . . , αi − 1 avem q(j)(xi) = p(j)(xi) =f (j)(xi). In plus, q(x) = f(x). Deci q este polinomul de interpolare asociatfunctiei f pe nodurile x1, . . . , x1, . . . , xm, . . . , xm, x. Consideram functiaF (t) = f(t)− q(t).

§4. Interpolare prin polinoame 97
Functia F admite ın punctul xi un zero de multiplicitate ≥ αi si ın punctulx un zero de multiplicitate ≥ 1. Numarul de zerouri ale functiei F , socotindsi multiplicitatea lor, este deci cel putin α1, + · · ·+ αn + 1 = n + 1.
Utilizınd teorema lui Rolle, care arata ca ıntre doua zerouri consecutive alelui F se afla cel putin un zerou pentru F ′, deducem ca F ′ are cel putin nzerouri; de unde procedınd prin recurenta asupra lui F (k) obtinem ca F (n)
are cel putin un zero continut ın cel mai mic interval ce contine punctelex, x1, · · · , xm adica ın cox1, · · · , xm, x. Avem deci
0 = F (n)(ξx) = f (n)(ξx)− q(n)(ξx).
Dar q este un polinom de gradul n avınd coeficientul lui tn egal cuf(x)− p(x)
ω(x)prin urmare q(n)(t) =
f(x)− p(x)ω(x)
n!, de unde (4.10) 2
Observatie Formula (4.10) se poate demonstra si daca se utilizeaza formaNewton a polinomului de interpolare asociat lui f si anume se foloseste faptulca
f(x)− p(x) = [α1︷ ︸︸ ︷
x1, . . . , x1, . . . ,
αm︷ ︸︸ ︷xm, . . . , xm, x]f · ω(x)
iar daca t1, . . . tk ∈ [a, b] atunci ∃ ξ ∈ cot1, . . . , tk astfel ca
[t1, · · · , tk]f =fk−1(ξ)(k − 1)!
.
Corolarul 4.1 Punınd Mn = maxx∈[a,b] |f (n)(x)|, o margine superioara aerorii de interpolare E(x) = f(x)− p(x) este data prin
|E(x)| ≤ Mn
n!|ω(x)|.
Se poate arata ca exista o functie ϕ astfel ca
f(x)− p(x) =∫ b
aϕ(t)f (n)(t)dt.
Exemplu Luınd f(x) = ex, avem pentru orice x ∈ [a, b], Mn+1 = eb sioricare ar fi punctele x1 . . . xn, |ω(x)| ≤ (b− a)n, de unde
maxx∈[a,b]
|f(x)− pn(x)| ≤ (b− a)meb
n!

98 Capitolul 2. Metode de interpolare
`a b
RI
Figura 4.1:
decilim
n→∞ maxx∈[a,b]
|f(x)− fn(x)| = 0.
In fapt, avem un rezultat mai general dat de teorema urmatoare:
Teorema 4.6 Fie [a, b] ⊂ R si f o functie analitica pe o regiune din Cmarginita de un contur ΓR format din doua semicercuri cu centrele ın a sib si de doua segmente de dreapta paralela cu axa reala (vezi figura 4.1). Sapresupunem ca R > b−a. Fie x
(n)1 , . . . , x
(n)n puncte arbitrare pe [a, b]. Atunci
limn→∞P (f ;x(n)
1 , . . . , x(n)n ; x) = f(x)
uniform pentru x ∈ [a, b].
Demonstratie.
supx∈[a,b]
|f(x)− P (f ;x(n)1 , · · ·x(n)
n ;x)| =
= supx∈[a,b]
∣∣∣fn(ξx)n!
(x− x(n)1 ) · · · (x− x(n)
n )∣∣∣ ≤ 1
n!(b− a)n sup
ξ∈[a,b]|f (n)(ξ)|.
Darf (n)(ξ) =
n!2πi
∫
Γr
f(t)(t− ξ)n−1
dt
cu b− a < r < R.

§4. Interpolare prin polinoame 99
Pentru t ∈ Γr, ξ ∈ [a, b] se obtine |t− ξ| ≥ r deci
|f (n)(ξ)| ≤ n!2π
supt∈Γr
|f(ξ)| 1rn+1
l(Γr),
l(Γr) reprezentınd lungimea conturului Γr. Rezulta ca |f (n)(ξ) ≤ Mn!
rn+1| si
supx∈[a,b]
|f(x)− P (f ; x(n)1 , . . . , x(n)
n ; x)| ≤ M
r
(b− a
r
)n → 0
deoarece r > b− a. Daca precizam nodurile x(n)1 , . . . , x
(n)n , se poate obtine o
teorema de convergenta uniforma pentru functii mai generale.
De exemplu daca
x(n)j =
a + b
2+
b− a
2cos
(−π +
2j − 12n
π), j ∈ 1, . . . , n
avem x(n)j ∈ [a, b] si
limn→∞P (f ;x(n)
1 , . . . , x(n)n ; x) = f(x)
uniform pe [a, b] daca f este o functie analitica ın interiorul conturului ΓR
din enuntul precedent, unde de data aceasta putem presupune R > (b− a)/42
Pentru functia definita prin f(x) = 1/(1 + x2) si pentru
x(n)i = −b + 2b
i− 1n− 1
, i = 1, 2, . . . , n
avemP (f ; x(n)
1 , · · · , x(n)n ; x) → f(x)
uniform pe [−b, b] daca 2b < e.
Pentru b = 5, avem urmatorul rezultat datorat lui Runge (1901 ).
limn→∞|f(x)− P (f ; x(n)
1 , . . . , x(n)n ; n)| = ∞
pentru |x| > 3.64
In figurile 4.2 si 4.3 sunt reprezentate grafic functia f si polinoamele LagrangeP (f ; x(n)
1 . . . , x(n)n ;x) pentru n = 5 si n = 11. Mai mult, avem urmatorul
rezultat.

100 Capitolul 2. Metode de interpolare
Figura 4.2:
Figura 4.3:

§4. Interpolare prin polinoame 101
Teorema 4.7 (Faber, 1914) Daca [a, b] ⊂ R si pentru orice n ∈ N ,x
(n)1 , . . . , x
(n)n sınt puncte distincte doua cıte doua din [a, b],atunci exista o
functie f continua pe [a, b] astfel ca P (f ; x(n)1 , . . . , x
(n)n ; x) sa nu convearga
uniform catre f(x) pe [a, b] pentru n →∞.
Demonstratie. Fie Ln : C([a, b]) → C([a, b]) operatorul care asociazafiecarei functii continua f polinomul de interpolare Lagrange
pn(x) = P (f ; x(n)1 , . . . , x(n)
n ; x).
Daca pentru orice f ∈ C([a, b]) am avea ‖Ln(f)− f‖ → 0 atunci ar rezultasupn ‖Ln(f)‖ < +∞ ∀ f ∈ C([a, b]), iar din teorema Banach-Steinhausam obtine ca
supn‖Ln‖ < +∞
ceea ce este ın contradictie cu faptul ca
‖Ln‖ ≥ 2π2
ln(n− 1) + b(n)
unde b este o functie marginita ın n (vezi Golomb [31] ).
In concluzie, exista f ∈ C([a, b]) astfel ca Pn(f ;x(n)1 , . . . , x
(n)n ; x) sa nu
convearga uniform la f(x) pe [a, b]. 2
Avem si urmatorul rezultat.
Daca f ∈ C([a, b]) exista un sir x(n)1 , . . . , x
(n)n n∈N de puncte astfel ca
Pn(f, x(n)1 , . . . , x
(n)n ; x) → f(x) uniform pentru x ∈ [a, b].
4.2 Interpolarea prin polinoame trigonometrice
In teoria interpolarii intervine adresa si interpolarea prin polinoame trigono-metrice. Dam acum cıteva rezultate, mai importante, din teoria interpolariiprin polinoame trigonometrice.
• Sa consideram, ın intervalul [0, 2π) un sistem de 2n + 1 puncte,x0, . . . , x2n, distincte doua cıte doua.

102 Capitolul 2. Metode de interpolare
Polinoamele trigonometrice de ordinul n
tk(x) =
(k−1∏
i=0
sinx− xi
2
)×
( 2n∏
i=k+1
sinx− xi
2
)
(k−1∏
i=0
sinxk − xi
2
)×
( 2n∏
i=k+1
sinxk − xi
2
) (4.11)
unde k = 0, 1, . . . , 2n, satisfac conditiile tk(xi) = δik De aici rezulta ca oricarear fi y0, y1, . . . , y2n polinomul trigonometric de ordinul n
T (x) =2n∑
k=0
yktk(x) (4.12)
satisface conditiileT (xi) = yi, i = 0, . . . , 2n (4.13)
• Daca se dau n + 1 puncte distincte x0, . . . , xn ın intervalul [0, π] atuncipolinoamele trigonometrice pare, de ordin n
ck(x) =
[k−1∏
j=0
(cosx− cosxj)]×
[ n∏
j=k+1
(cosx− cosxj)]
[k−1∏
j=0
(cosxk − cosxj)]×
[ n∏
j=k+1
(cosxk − cosxj)] (4.14)
unde k = 0, 1, . . . , n satisfac conditiile
ck(xj) = δkj . (4.15)
De aici rezulta ca oricare ar fi y0, . . . , yn din R polinomul trigonometric par,de ordinul n,
C(x) =n∑
k=0
ykck(x) (4.16)
satisface conditiileC(xj) = yj , j = 0, 1, . . . , n (4.17)
• Daca punctele x1, . . . , xn din intervalul (0, π) sınt distincte, doua cıte

§4. Interpolare prin polinoame 103
doua, polinoamele trigonometrice impare, de ordin n,
sk(x) =
sinx[k−1∏
j=1
(cosx− cosxj)]×
[ n∏
j=k+1
(cosx− cosxj)]
sinxk
[k−1∏
j=1
(cosxk − cosxj)]×
[ n∏
j=k+1
(cosxk − cosxj)] (4.18)
unde k = 1, . . . , n satisfac conditiile
sk(xj) = δjk, j, k ∈ 1, . . . , n. (4.19)
De aici rezulta ca oricare ar fi y1, . . . , yn din R polinomul trigonometricimpar, de ordinul n,
S(x) =n∑
k=1
yksk(x) (4.20)
verifica relatiileS(xj) = yj , j = 1, . . . , n (4.21)
• Mai general, ca o consecinta a teoremei fundamentale a interpolarii pentrupolinoame algebrice, avem urmatorul rezultat.
Teorema 4.8 (interpolarea prin polinoame trigonometrice)
Fie x1, . . . , xm, m numere reale, distincte doua cıte doua, apartinınd inter-valului [0, 2π). Fie k1, . . . , km, m numere ıntregi nenegative, iar
y1,0, . . . y1,k1 , . . . , ym,0, . . . , ym,km
numere complexe oarecare . Daca k1 + k2 + · · · + km + m = 2n + 1 atunciexista un polinom trigonometric P unic astfel ca
1) ordinul lui P sa fie ≤ n adica
P (x) = a0 +n∑
k=1
(ak cos kx + bk sin kx);
2) P (j)(xs) = ys,j , j = 0, 1, . . . ks, s = 1, . . . m.

104 Capitolul 2. Metode de interpolare
Demonstratie. Tinınd seama de formulele lui Euler
eix = cosx + i sinx, e−ix = cosx− i sinx
rezulta ca forma generala a unui polinom trigonometric, de ordin cel multn, este
P (x) = e−inxQ(eix)
unde Q este un polinom avınd gradul cel mult 2n. Observam ca
Q(eix) = einxP (x)
ieixQ′(eix) = (einxP (x))′
ieixQ′′(eix) = (−ie−ix(einxP (x)′)′
Aceasta arata ca valorile
Q(eix1), Q′(eix1), . . . , Q(k1)(eix1), . . . , Q(eixm), . . . , Q(km)(eixm)
sınt bine determinate. Cum 2n = k1 + . . . + km + m − 1 rezulta, conformteoremei fundamentale, ca polinomul Q cautat, exista si este unic. 2
• Polinomul trigonometric T construit cu ajutorul polinoamelor (4.11) esteunicul polinom trigonometric de ordinul n, care ın punctele x0, . . . , x2n dis-tincte satisface conditiile T (xi) = yi, i = 0, . . . , 2n. De aici rezulta casistemul de ecuatii liniare care se obtine daca reprezentam T sub forma
T (x) = a0 +n∑
k=1
(ak cos kx + bk sin kx)
si impune conditiile T (xi) = yi, i = 0, . . . , 2n, adica
a0 +n∑
k=1
(ak cos kxi + bk sin kxi) = yi, i = 0, . . . , 2n (4.22)
unde necunoscutele sınt a0, . . . , an, b1, . . . , bn, are o solutie si numai unasingura. Determinantul sistemului (4.22) este diferit de zero. Acest deter-minant este
∣∣∣∣∣∣∣∣∣
1 cosx0 sinx0 cos 2x0 sin 2x0 · · · cosnx0 sinnx0
1 cosx1 sinx1 cos 2x1 sin 2x1 · · · cosnx1 sinnx1
· · · · · ·1 cosx2n sinx2n cos 2x2n sin 2x2n · · · cosnx2n sinnx2n
∣∣∣∣∣∣∣∣∣(4.23)

§4. Interpolare prin polinoame 105
si este egal cu
22n2 ∏
i>j
sinxi − xj
2
unde produsul se extinde la toti indicii i, j care satisfac inegalitatea i > j siparcurg sirul 0, 1, . . . , 2n.
Imitınd modul de prezentare adaptat la polinoamele algebrice din conditia
∣∣∣∣∣∣∣∣∣∣∣
1 cosx0 sinx0 · · · cosnx0 sinnx0 y0
1 cosx1 sinx1 · · · cosnx1 sinnx1 y1
· · · · · · · · · · · ·1 cosx2n sinx2n · · · cosnx2n sinnx2n y2n
1 cosx sinx · · · cosnx sinnx T (x)
∣∣∣∣∣∣∣∣∣∣∣
= 0
obtinem reprezentarea polinomului trigonometric de ordinul n, care coincideın punctele distincte x0, . . . x2n din [0, 2π) cu y0, . . . , y2n sub forma de cıt adoi determinanti
T (x) =
∣∣∣∣∣∣∣∣∣∣∣∣
1 cos x0 sinx0 · · · cosnx0 sinnx0 y0
1 cos x1 sinx1 · · · cosnx1 sinnx1 y1...
......
......
...1 cos x2n sinx2n · · · cosnx2n sinnx2n y2n
1 cos x sinx · · · cosnx sinnx 0
∣∣∣∣∣∣∣∣∣∣∣∣
: V
unde
V = V
(1, cosx, sinx, · · · , cosnx, sinnxx0, x1, x2, · · · , x2n−1, x2n
)
este determinantul definit de (4.23).
• Polinomul trigonometric par, de ordinul n, este singurul polinom par, deordinul n, care satisface conditiile
C(xk) = yk, k = 0, 1, . . . , n.
Prin urmare, sistemul de ecuatii liniare
a0 +n∑
k=1
ak cos kxi = yi, i = 0, . . . , n (4.24)

106 Capitolul 2. Metode de interpolare
cu necunoscutele a0, a1, . . . , an, are o solutie si numai una singura. Determi-nantul sistemului (4.24) este
∣∣∣∣∣∣∣∣∣
1 cosx0 · · · cosnx0
1 cosx1 · · · cosnx1
· · · · · · · · · · · ·1 cosxn · · · cosnxn
∣∣∣∣∣∣∣∣∣= V
(1, cosx, . . . , cosnxx0, x1, . . . , xn
)(4.25)
si este diferit de zero, oricare ar fi sistemul de puncte x0, . . . , xn distinctedoua cıte doua din intervalul [0, π). Acest determinant este egal cu
212n(n−1)
∏
i>j
(cosxi − cosxj).
Prin analogie, cu reprezentarea (4.11) obtinem pentru polinomul trigono-metric C(x) reprezentarea
C(x) =
∣∣∣∣∣∣∣∣∣∣∣∣
1 cosx0 cos 2x0 · · · cosnx0 y0
1 cosx1 cos 2x1 · · · cosnx1 y1...
......
......
1 cosxn cos 2xn · · · cosnxn yn
1 cosx cos 2x · · · cosnx 0
∣∣∣∣∣∣∣∣∣∣∣∣
: V
unde V = V
(1, cosx, . . . , cosnxx0, x1 . . . , xn
)este determinantul definit ın
(4.25).
• Polinomul trigonometric impar, de ordinul n, din (4.20) este singurul poli-nom trigonometric impar, de ordinul n, care satisface conditiile
S(xi) = yi, i = 1, . . . , n
ın punctele x1, . . . , xn din [0, π) distincte doua cıte doua. Prin urmare sis-temul de ecuatii liniare
n∑
k=1
bk sin kxi = yi, i = 1, . . . , n (4.26)
cu necunoscutele b1, . . . , bk are o solutie si una singura. Determinantul sis-temului
V
(sinx, sin 2x, . . . , sinnxx1, x2, . . . , xn
)=
∣∣∣∣∣∣∣∣∣
sinx1 sin 2x1, . . . , sinnx1
sinx2 sin 2x2, . . . , sinnx2
· · · · · · · · · · · ·sinxn sin 2xn . . . sinnxn
∣∣∣∣∣∣∣∣∣

§4. Interpolare prin polinoame 107
este diferit de zero si ın plus acest determinant este egal cu
212n(n−1) sinx1 sinx2 · · · sinxn
∏
i>j
(cosxi − cosxj).
Se poate obtine, de asemenea, reprezentarea lui S(x) sub forma de cıt a doideterminanti.
S(x) = −
∣∣∣∣∣∣∣∣∣∣∣∣
sinx1 sin 2x1 · · · sinnx1 y1
sinx2 sin 2x2 · · · sinnx2 y2...
......
...sinxn sin 2xn · · · sinnxn yn
sinx sin 2x · · · sinnx 0
∣∣∣∣∣∣∣∣∣∣∣∣
: V
(sinx, · · · , sinnxx1, · · · , xn
).
• In general avem urmatorul rezultat.
Teorema 4.9 Polinomul trigonometric de interpolare P , a carui existentasi unicitate a fost pusa ın evidenta ın Teorema 4.8, se poate reprezenta cafiind cıtul a doi determinanti si anume
P (x) =
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
f(0)0 (x1), f
(0)1 (x1) · · · f
(0)2n (x1) y1,0
· · · · · · · · · · · · · · ·f
(k1)0 (x1), f
(k1)1 (x1) · · · f
(k1)2n (x1) y1,k1
· · · · · · · · · · · · · · ·f
(0)0 (xm), f
(0)1 (xm) · · · f
(0)2n (xm) ym,0
· · · · · · · · · · · · · · ·f
(km)0 (xm), f
(km)1 (xm) · · · f
(km)2n (xm) ym,km
f0(x), f1(x) · · · f2n(x) 0
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
: V
unde f0(x) = 1; f2k−1(x) = cos kx si f2k(x) = sin kx, k = 1, · · ·n, iar
V =
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
f(0)0 (x1), f
(0)1 (x1) · · · f
(0)2n (x1)
· · · · · · · · · · · ·f
(k1)0 (x1), f
(k1)1 (x1) · · · f
(k1)2n (x1)
· · · · · · · · · · · ·f
(0)0 (xm), f
(0)1 (xm) · · · f
(0)2n (xm)
· · · · · · · · · · · ·f
(km)0 (xm), f
(km)0 (xm) · · · f
(km)2n (xm)
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣

108 Capitolul 2. Metode de interpolare
Demonstratie. Polinomul trigonometric P este unicul polinom de ordinuln care verifica
P (j)(xi) = yij , j = 0, . . . , ki, i = 1, . . . ,m.
De aici rezulta ca sistemul de ecuatii liniare care se obtine daca reprezentamP sub forma
P (x) = a0 +n∑
k=1
(ak cos kx + bk sin kx) =2n∑
i=0
αifi(x)
si impunem conditiile
P (j)(xi) = yi,j , j = 0, 1, . . . ki, i = 1, . . . , m
adica2n∑
k=0
αkf(j)k (xi) = yi,j , j = 0, 1, . . . , ki, i = 1, . . . ,m (4.27)
unde necunoscutele sınt α0, . . . , α2n, are o solutie si numai una. Determinan-tul sistemului este diferit de zero. Daca adaugam la sistemul (4.27) ecuatia
2n∑
k=0
αkfk(x) = P (x)
din conditia de compatibilitate obtinem∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
f(0)0 (x1), f
(0)1 (x1) · · · f
(0)2n (x1) y1,0
· · · · · · · · · · · · · · ·f
(k1)0 (x1), f
(k1)1 (x1) · · · f
(k1)2n (x1) y1,k1
· · · · · · · · · · · · · · ·f
(0)0 (xm), f
(0)1 (xm) · · · f
(0)2n (xm) ym,0
· · · · · · · · · · · · · · ·f
(km)0 (xm), f
(km)1 (xm) · · · f
(km)2n (xm) ym,km
f0(x), f1(x) · · · f2n(x) P (x)
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
= 0
de unde rezulta reprezentarea lui P (x) ca un cıt de doi determinanti.
Coeficientii polinomului P ın scrierea
P (x) =2n∑
k=0
αkfk(x)

§5. Interpolare cu functii spline 109
sınt dati de relatiile αi = Vi/V unde
Vi =
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
f(0)0 (x1) · · · f
(0)i−1(x1) y1,0 f
(0)i+1(x1) . . . f
(0)2n (x1)
......
...... · · ·
f(k1)0 (x1) · · · f
(k1)i−1 (x1) y1,k1 f
(k1)i+1 (x1) . . . f
(k1)2n (x1)
......
...... · · ·
f(0)0 (xm) · · · f
(0)i−1(xm) ym,0 f
(0)i+1(xm) . . . f
(0)2n (xm)
......
...... · · ·
f(km)0 (xm) · · · f
(km)i−1 (xm) ym,km f
(km)i+1 (xm) . . . f
(km)2n (xm)
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
,
pentru i = 0, . . . , 2n. 2
5 Interpolarea prin functii polinomiale pe portiuni
Vom analiza, pentru ınceput, interpolarea unei functii continue prin functiispline de ordinul ıntıi, prin functii spline cubice si apoi prin functii spline deordinul m.
5.1 Interpolarea functiilor continue cu functiispline polinomiale de ordinul ıntıi
Daca ∆n = xini=1 cu a = x1 < x2 < · · · < xn = b este o diviziune a
intervalului [a, b] iar t1, . . . , tn sınt n puncte distincte ın intervalul [a, b] siy = (y1, · · · , yn) ∈ Rn, gasirea unei functii s din S1(∆n) cu proprietatile
s(ti) = yi, i = 1, · · · , n (5.1)
constituie problema de interpolare cu functii spline de ordinul ıntıi.
Vom da, ın continuare, o teorema care arata cınd problema de interpolarecu functii spline de ordinul ıntıi are solutie.
Teorema 5.1 Urmatoarele afirmatii sınt echivalente:
i) problema de interpolare (5.1) admite solutie unica;ii) det(H) 6= 0 unde H = (hij) cu hij = Hj(ti);iii) Hi(ti) 6= 0, i = 1, · · · , niv) ti ∈ (xi−1, xi+1), i = 1, · · · , n.

110 Capitolul 2. Metode de interpolare
Demonstratie. Echivalentele i) ⇐⇒ ii), iii) ⇐⇒ iv) sınt evidente. Pentrua ıncheia demonstratia va fi suficient sa mai aratam ca ii) ⇔ iv).
ii) ⇒ iv). Demonstratia se face prin reducere la absurd. Presupunem decica, desi detH 6= 0, exista r astfel ıncıt tr 6∈ (xr−1, xr+1) adica fie tr ≤xr−1, fie tr ≥ xr+1. In ambele cazuri se ajunge la contradictia detH = 0.Sa presupunem tr ≤ xr−1. Atunci, tinınd seama ca suportul lui Hj este[xj−1, xj+1], rezulta ca Hj(ti) = 0 pentru 1 ≤ i ≤ r, r ≤ j ≤ n, decimatricea elementelor hij = Hj(ti), 1 ≤ i ≤ r, r ≤ j ≤ n este nula. Deci,de aici, rezulta ca determinantul format cu elementele liniilor r, r+1, . . . , n sicoloanelor r, r+1, . . . , n este nul (ıntrucıt prima sa linie este nula). Rezulta deaici, liniar dependenta coloanelor r, r+1, . . . , n ale acestui determinant. Cumcompletarea acestor coloane pına la coloanele corespunzatoare ale matricii Hse face cu zero, avem liniar dependenta coloanelor r, r + 1, . . . , n ale matriciiH, deci det(H) = 0.
Cu argumente similare se obtine det(H) = 0 daca tr ≥ xr+1.
iv) ⇒ ii). Intr-adevar, presupunınd ti ∈ (xi−1, xi+1) ∀i = 1, . . . , n rezultaca matricea H este tridiagonala cu elementele de pe diagonala principalanenule si ın fiecare linie exista cel mult doua elemente nenule.Intr-adevar, Hi(ti) 6= 0 (vezi implicatia iv) ⇒ iii)). Daca ti ∈ (xi−1, xi)atunci Hi+1(ti) = 0 (deoarece supp Hi+1 = [xi, x+2] iar Hi−1(ti) 6= 0. Ana-log, daca t ∈ (xi, xi+1) atunci Hi−1(ti) = 0 iar Hi+1(ti) 6= 0. In sfırsit, dacati = xi atunci Hi−1(ti) = Hi+1(ti) = 0. Asa dar matricea H are urmatorulaspect:
H1(t1) H2(t1)H1(t2) H2(t2) H3(t2)
H2(t3) H3(t3) H4(t3)
. . . . . . . . .. . . . . . . . .
Hn−2(tn−1) Hn−1(tn−1) Hn(tn−1)Hn−1(tn) Hn(tn)
Putem acum demonstra prin inductie ca det(H) 6= 0. Fie Dk determinantulmatricii formate cu primele k linii si k coloane. Vom arata cadet(H) = Dn este nenul. Evident D1 = H1(t1) 6= 0. Sa aratam acum ca
D2 =
∣∣∣∣∣H1(t1) H2(t1)H1(t2) H2(t2)
∣∣∣∣∣ 6= 0

§5. Interpolare cu functii spline 111
Intr-adevar, deoarece t2 ∈ (x1, x3) este posibila numai una din urmatoarelesituatii: t2 ∈ (x1, x2) sau t2 ∈ [x2, x3). Daca t2 ∈ [x2, x3) atunci H1(t2) = 0deci D2 = H1(t1)H2(t2) 6= 0. Daca t2 ∈ (x1, x2) atunci, cum prin ipotezat1 ∈ [x1, x2) avem x1 ≤ t1 < t2 < x2. Consideram functia
f(x) =y2 − y1
t2 − t1(x− t1) + y1, x ∈ [x1, x2].
Evident f este o functie spline de ordinul ıntıi ce corespunde diviziunii x1 <x2. Conform Teoremei 2.5, de reprezentare, exista α1, α2 ∈ R (unice) astfelıncıt
f(x) = α1H1(x) + α2H2(x), x ∈ [x1, x2].
In particular,y1 = f(t1) = α1H1(t1) + α2H2(t1)
y2 = f(t2) = α1H1(t2) + α2H2(t2)
de unde rezulta D2 6= 0.
Presupunem ca Di 6= 0 pentru i = 1, 2, . . . , k − 1. Sa aratam ca Dk 6= 0.Pentru aceasta demonstram, mai ıntıi, ca pentru orice k ≥ 3
Dk =
Hk(tk) ·Dk−1 daca Hk−1(tk) = 0
Hk(tk) ·Dk−1 daca
Hk−1(tk) = 0
Hk−2(tk−1) 6= 0
Dk−2 ·∣∣∣∣∣
Hk−1(tk−1 Hk(tk−1)Hk−1(tk) Hk(tk)
∣∣∣∣∣ daca
Hk−1(tk) 6= 0
Hk−2(tk−1) = 0(5.2)
Intr-adevar, daca Hk−1(tk) = 0, atunci dezvoltınd Dk dupa linia k avemDk = Hk(tk) · Dk−1. Daca Hk−1(tk) 6= 0 atunci pentru Hk−2(tk−1) putemavea : sau Hk−2(tk−1) 6= 0 sau Hk−2(tk−1) = 0. Daca Hk−2(tk−1) 6= 0 atunciHk(tk−1) = 0 si dezvoltınd Dk dupa coloana k avem Dk = Hk(tk) · Dk−1.Daca Hk−2(tk−1) = 0 atunci
Dk = Dk−2 ·∣∣∣∣∣
Hk−1(tk−1) Hk(tk−1)Hk−1(tk) Hk(tk)
∣∣∣∣∣ .
Tinınd seama de formula (5.2) si de ipoteza de inductie, pentru a dovedi caDk 6= 0 ın oricare dintre cazuri, este suficient sa mai aratam ca
∣∣∣∣∣Hk−1(tk−1) Hk(tk−1)Hk−1(tk) Hk(tk)
∣∣∣∣∣ 6= 0

112 Capitolul 2. Metode de interpolare
daca Hk−1(tk) 6= 0 si Hk−2(tk−1) = 0, pentru care demonstratia este similaracu cea data pentru D2 6= 0. 2
In cazul ın care nodurile de interpolare coincid cu nodurile diviziunii functiaspline de interpolare se exprima usor si anume
s =n∑
j=1
yjHj
unde H1, . . . , Hn este baza locala pentru S1(∆n) construita ın §2 .
Daca f este o functie continua, notam cu sf urmatoarea functie spline:
sf =n∑
i=1
f(xi)Hi (5.3)
Evaluarea erorii de interpolare
Vom analiza, ın cele ce urmeaza, eroarea pe care o facem ınlocuind functia fprin functia spline sf din S1(∆n). Operatorul care asociaza fiecarei functiicontinue pe intervalul [a, b] functia sf din S1(∆n) va fi notat ın cele ceurmeaza prin I1. Asadar, I1 : C([a, b]) → S1(∆n), I1(g) = sg oricare arfi g ∈ C([a, b]. Teorema urmatoare da evaluari ale erorii de interpolare ınnorma uniforma pe [a, b], adica ‖g − I1(g)‖C([a,b]).
Teorema 5.21) Daca g ∈ C([a, b]) atunci ‖g− I1(g)‖C([a,b]) ≤ ω(g, |∆n| unde |∆n| este
norma diviziunii ∆n adica |∆n| = max1≤i≤n−1(xi+1 − xi) iar ω(g, δ)este, pentru orice g ∈ C([a, b]) si δ ∈ [0, b−a), modulul de continuitatedefinit prin
ω(g, δ) = maxt,t+h∈[a,b], |h|<δ
|g(t + h)− g(t)|
2) Daca g ∈ C1([a, b]) atunci ‖g − I1(g)‖C([a,b]) ≤12|∆n| · ‖g′‖C([a,b])
3) Daca g ∈ C2([a, b]) atunci ‖g − I1(g)‖C([a,b]) ≤18|∆n|2 · ‖g′′‖C([a,b])
Demonstratie. 1) Conform formulei de reprezentare (5.3) pentru oricex ∈ [a, b] avem
I1(g)(x) = sg(x) =n∑
j=1
sg(xj) ·Hj(x) =n∑
j=1
g(xj) ·Hj(x).

§5. Interpolare cu functii spline 113
Daca x ∈ [xi, xi+1), tinınd cont ca Hj(x) = 0 oricare ar fi j 6= i, i + 1,obtinem
I1(g)(x) = g(xi) ·Hi(x) + g(xi+1)Hi+1(x) =
=xi+1 − x
xi+1 − xig(xi) +
x− xi
xi+1 − xig(xi+1)
De unde, pentru orice x ∈ [xi, xi+1],
|g(x)− (I1g)(x)| = | xi+1 − x
xi+1 − xi(g(x)− g(xi)) +
x− xi
xi+1 − xi(g(x)− g(xi+1)| ≤
≤ max|g(x)− g(xi)|), |g(x)− g(xi+1)| ≤≤ max
x′,x′′∈[a,b], |x′−x′′|≤|∆n||g(x′)− g(x′′)|.
De aici urmeaza,
‖g − I1g‖C([a,b]) = maxx∈[a,b]
|g(x)− (I1g)(x)| =
= maxx∈[xi,xi+1], 1≤i≤n−1
|g(x)− (I1g)(x)| ≤ ω(g, |∆n|)
2) Cum I1(g) este un polinom de interpolare de gradul ıntıi pentru g peintervalul [xi, xi+1], tinınd cont de formula care da restul pentru formula deinterpolare, pentru orice x ∈ [xi, xi+1] avem:
|g(x)− I1(g)(x)| = |(x− xi)(x− xi+1)[xi, xi+1, x]g| =
= |(x− xi)(x− xi+1)| ·∣∣∣ [xi, x]g − [x, xi+1]g
xi+1 − xi
∣∣∣ ≤
≤ |x− xi||x− xi+1||xi+1 − xi| |[xi, x]g|+ |[x, xi+1]g| ≤
≤ xi+1 − xi
4· 2 sup
xi≤t≤xi+1
|g′(t)|.
Deci ‖g − I1(g)‖ ≤ |∆n|2‖g′‖.
3) Pentru x ∈ [xi, xi+1] avem
||g(x)− (I1g)(x)| = |(x− xi)(x− xi+1)[xi, xi+1, x]g| ≤
≤ |∆n|24
· ‖g′′
2‖ =
|∆n|28
‖g′′‖.

114 Capitolul 2. Metode de interpolare
Pentru orice functie continua, daca ‖∆n‖ → 0 atunci ‖I1(g)−g‖ → 0 si aceaanomalie care aparea ın cazul interpolarii prin polinoame ın cazul interpolariicu functii spline de ordinul ıntıi nu mai apare.
Rezultatele obtinute pentru functii din C1([a, b]) si C2([a, b]) nu sınt princi-pial diferite de cele pentru functii continue, important de retinut este faptulca odata cu cresterea regularitatii lui g creste viteza de convergenta.
Faptul ca ‖I1g − g‖ → 0 cınd |∆n| → 0 se explica prin aceea ca ‖I1‖ = 1pentru orice diviziune ∆n si utilizınd principiul marginirii uniforme. 2
Caracterizarea variationala a functiilor spline deinterpolare de ordinul ıntii
Vom da ın cele ce urmeaza o caracterizare variationala a functiilor spline deinterpolare si anume vom demonstra teorema urmatoare.
Teorema 5.3
Daca ∆n = xini=1 cu a = x1 < · · · < xn = b este o diviziune a in-
tervalului [a, b], iar Ey = g ∈ H1(a, b); g(xi) = yi, i = 1, . . . , n undey = (y1, · · · , yn) ∈ Rn, atunci sy =
∑ni=1 yiHi este singura functie din Ey
care minimizeaza functionala F definita prin
F(g) =∫ b
a|g′(x)|2dx
adicaF(sy) = inf
g∈Ey
F(g).
Demonstratie. Functia s = sy =∑n
i=1 yiHi este din Ey si pentru oriceg ∈ Ey avem:∫ b
a((g′(x)− s′(x))2dx =
∫ b
ag′(x)2dx− 2
∫ b
ag′(x)s′(x)dx +
∫ b
as′(x)2dx =
=∫ b
ag′(x)2dx− 2
∫ b
a(g′(x)− s′(x))s′(x)dx−
∫ b
as′(x)2dx.
Dar∫ b
a(g′(x)− s′(x))s′(x)dx =
n−1∑
i=1
∫ xi+1
xi
(g′(x)− s′(x))s′(x)dx =
=n−1∑
i=1
(g(x) − s(x))s′(x)|xi+1xi
= 0, deoarece s′ pe intervalul (xi, xi+1) este o

§5. Interpolare cu functii spline 115
constanta iar g(xi) = yi = s(xi), i = 1, · · · , n. Deci∫ b
a(g′(x)− s′(x))2dx =
∫ b
ag′(x)2dx−
∫ b
as′(x)2dx (5.4)
de unde rezulta∫ b
a[s′(x)]2dx ≤
∫ b
a[g′(x)]2dx ∀ g ∈ Ey.
Unicitatea functiei s ∈ Ey care minimizeaza functionala F rezulta, fie aratındca F este strict convexa pe Ey ( de fapt este uniform convexa ),fie direct. Intr-adevar, daca exista f ∈ Ey cu proprietatea F(f) = F(s)
atunci∫ b
a(f ′(x) − s′(x))2dx = 0, deci f ′(x) − s′(x) = 0 a.p.t. ın (a, b), de
unde f(x) = s(x) + A ın [a, b], unde A este o constanta. Cum f si s apartinmultimii Ey rezulta ca A = 0, deci f = s. 2
5.2 Interpolarea cu functii polinomiale de gradultrei pe portiuni
Se considera diviziunea ∆n = xini=1, cu a = x1 < . . . < xn = b, a inter-
valului [a, b] . Dındu-se o functie continua g : [a, b] → R se considera uninterpolant f din PP3(∆n) astfel ca f(xi) = g(xi) pentru orice i = 1, . . . , n.
Pe fiecare interval [xi, xi+1] functia f coincide cu un polinom Pi avınd gradulcel mult trei. Polinomul Pi trebuie sa satisfaca conditiile
Pi(xi) = g(xi), Pi(xi+1) = g(xi+1)
P ′i (xi) = si, P ′
i (xi+1) = si+1
∀ i = 1, . . . , n− 1
unde s1, . . . , sn sınt parametri arbitrari ( parametri liberi ).
Functia f coincide cu g ın x1, . . . , xn si este de clasa C1([a, b]), adica estecontinua si are derivata de ordinul ıntıi continua pe [a, b] pentru orice alegerea parametrilor s1, . . . , sn.
Pentru a calcula coeficientii polinomului Pi folosim forma Newton a polino-mului de interpolare, adica
Pi(x) = Pi(xi) + (x− xi)[xi, xi]Pi + (x− xi)2[xi, xi, xi+1]Pi
+(x− xi)2(x− xi+1)[xi, xi, xi+1, xi+1]Pi

116 Capitolul 2. Metode de interpolare
Determinam coeficientii din tabelul de diferente finite de mai jos.
[·]Pi [·, ·]Pi [·, ·, ·]Pi [·, ·, ·, ·]Pi
xi g(xi)si
xi g(xi)[xi, xi+1]g − si
xi+1 − xi
[xi, xi+1]gsi+1 + si − 2[xi, xi+1]g
(xi+1 − xi)2
xi+1 g(xi+1)si+1 − [xi, xi+1]g
xi+1 − xi
si+1
xi+1 g(xi+1)
In functie de (x− xi)r acest polinom se scrie
Pi(x) = c1,i + c2,i(x− xi) + c3,i(x− xi)2 + c4,i(x− xi)3
unde
c1,i = Pi(xi) = g(xi)c2,i = P ′
i (xi) = si
c3,i =P ′′
i (xi)2
= [xi, xi, xi+1Pi − (xi+1 − xi)[xi, xi, xi+1, xi+1]Pi =
= ([xi, xi+1]g − si)/(xi+1 − xi)− c4,i(xi+1 − xi)
c4,i =P ′′′
i (x)6
=si + si+1 − 2[xi, xi+1]g
(xi+1 − xi)2.
Diferitele alegeri ale interpolantului cubic pe portiuni difera prin alegereaparametrilor s1, . . . , sn. Cele mai folosite alegeri sınt : interpolarea Her-mite cubica, interpolarea Bessel cubica, interpolarea Akima, interpolarea cufunctii spline cubice.
Interpolarea Hermite cubica
In acest caz se aleg parametrii s1, . . . , sn prin si = g′(xi). Aceasta ınseamnaca fiecare bucata Pi depinde numai de informatiile din, sau aproape din,intervalul [xi, xi+1]. Pentru x ∈ [xi, xi+1] avem
|f(x)− g(x)| = |(x− xi)2(x− xi+1)2[xi, xi, xi+1, xi+1; x]g| ≤

§5. Interpolare cu functii spline 117
≤(xi+1 − xi
2
)4max
ξ∈[xi,xi+1]|g(4)(ξ)|/4!
de unde‖f − g‖C([a,b]) ≤
1384
|∆n|4 · ‖g(4)‖C([a,b]).
Pentru nodurile echidistante xi = x1 + (i − 1)h, cu h = (b − a)/(n − 1)obtinem
‖g − f‖C(a,b]) = O(h4).
Interpolarea Bessel cubica
In acest caz se aleg s1, . . . , sn astfel: si este panta tangentei ın xi la polinomulp de gradul 2 ce coincide cu g ın xi−1, xi, xi+1.
Usor se demonstreaza ca
si =(xi+1 − xi)[xi−1, xi]g + (xi − xi−1)[xi, xi+1]g
xi+1 − xi−1(5.5)
Intr-adevar, fie p polinomul de grad al doilea ce verifica
p(xi−1) = g(xi−1), p(xi) = g(xi), p(xi+1) = g(xi+1),
de unde utilizınd forma Newton obtinem
p(x) = g(xi−1) + (x− xi−1)[xi−1, xi]g + (x− xi−1)(x− xi)[xi−1, xi, xi+1]g
si
p′(x) = [xi−1, xi]g + (2x− xi − xi−1)[xi, xi+1]g − [xi−1, xi]g
xi+1 − xi−1
decip′(xi) = [xi−1, xi]g + (xi − xi−1)
[xi, xi+1]g − [xi−1, xi]gxi+1 − xi−1
=
=(xi+1 − xi)[xi−1, xi]g + (xi − xi−1)[xi, xi+1]g
xi+1 − xi−1.
Tinınd seama cae := g − f = g − fH + E
unde fH este functia de interpolare cubica Hermite, iar
E(x) =(e′(xi)
xi+1 − x
xi+1 − xi− e′(xi+1)
x− xi
xi+1 − xi
)× (x− xi)(xi+1 − x)
xi+1 − xi

118 Capitolul 2. Metode de interpolare
pentru orice x ∈ [xi, xi+1] obtinem
‖g − f‖C([a,b]) ≤ ‖g − fH‖C([a,b]) + |∆n| ·maxi|e′(xi)|/4 (5.6)
Notam ca e′(xj) = g′(xj) − sj , pentru orice j. Din relatia (5.6 ) se poatedemonstra ca ‖f − g‖C([a,b]) = O(|∆n|3) pentru interpolarea Bessel cubicacu pantele de la capete prescrise, iar daca diviziunea ∆n este echidistantaatunci ‖f − g‖C([a,b]) = O(|∆n|4).
Interpolarea Akima
Acest procedeu de interpolare dateaza din 1970 si a fost propus de Akimapentru a combate oscilatiile ın interpolare. Se alege
si =wi+1[xi−1, xi]g + wi−1[xi, xi+1]g
wi+1 + wi−1
unde wj = |[xj , xj+1]g − [xj−1, xj ]g|. Aproximarea asigurata de aceastametoda este, ın general, numai de ordinul O(|∆n|2).
5.3 Interpolarea prin functii spline cubice
Fiind date: o diviziune ∆n = xi cu a = x1 < · · · < xn−1 < xn = b aintervalului [a, b] , si vectorul y = (y1, . . . , yn) ∈ Rn se pune problema gasiriiunei functii s ∈ S3(∆n) astfel ca
s(xi) = yi, i = 1, . . . , n (5.7)
Cum S3(∆n) este un spatiu de dimensiune n+2, ın general, mai sınt necesareınca doua conditii pentru a identifica o functie spline cubica ce verifica (5.7).
Din Propozitia 2.1 rezulta ca o functie spline cubica s se poate reprezentaın mod unic pe fiecare interval [xi, xi+1] stiind valorile lui s si a derivateide ordinul ıntıi ın punctele xi, xi+1. Vectorul (s1, . . . , sn) unde si = s′(xi)verifica sistemul (2.10) cu n − 2 ecuatii, deci pentru a determina vectorul(s1, . . . , sn)T mai sınt necesare ınca doua ecuatii. Aceste ecuatii se determinaimpunınd conditii suplimentare.
Iata cıteva tipuri de asemenea conditii, care sınt cel mai des utilizate ınpractica.

§5. Interpolare cu functii spline 119
I) Se indica valoarea lui s′ ın punctele x1 si xn adica s′(x1) = αn, sis′(xn) = βn.
II) Se indica valoarea lui s′′ ın punctele x1 si xn, adica s′′(x1) = An, sis′′(xn) = Bn.
III) Polinomul care ıl reprezinta pe s pe intervalul (x1, x2) sa fie identiccu polinomul care ıl reprezinta pe s pe intervalul (x2, x3), adica peintervalul (x1, x3) functia s sa fie reprezentata de acelasi polinom, cualte cuvinte cerem ca ın punctul x2 functia s sa fie de trei ori derivabila.La fel se pune problema si pe intervalul (xn−2, xn).
IV) Se considera λ1 polinomul Lagrange de interpolare pentru nodurilex1, x2, x3 si derivata de ordinul ıntıi a acestui polinom sa fie luatadrept conditie la frontiera pentru s, adica s′(x1) = λ′1(x1). Acelasilucru putem face si ın capatul din dreapta, adica derivata lui s ın xn
( s′(xn)) se ia ca fiind egala cu derivata de ordinul ıntıi a polinomuluide interpolare Lagrange λn pe nodurile xn−2, xn−1, xn.
V) Functia s sa fie o functie periodica, adica
s(j)(x1) = s(j)(xn), j = 0, 1, 2.
Evident tipurile I,. . . , IV pot fi combinate, adica la unul din capete saimpunem o conditie, iar la celalalt capat sa impunem alta conditie.
Determinarea functiilor spline cubice de interpolare
Vom deduce ecuatiile pe care trebuie sa le verifice vectorul (s1, . . . , sn),si = s′(xi) pentru o functie spline cubica de interpolare cu conditiile lacapete de tipul I)- IV).
Propozitia 5.1 Fie s ∈ S3(∆n). Daca s(xi) = yi si s′(xi) = si cui = 1, . . . , n atunci
(xi+1−xi)si−1+2(xi+1−xi−1)si+(xi−xi−1)si+1 = di i = 2, . . . , n−1 (5.8)
undedi = 3
[ yi − yi−1
xi − xi−1(xi+1 − xi) +
yi+1 − yi
xi+1 − xi(xi − xi−1)
]
In plus,

120 Capitolul 2. Metode de interpolare
1) s′′(x1) = An daca si numai daca
2s1 + s2 = 3y2 − y1
x2 − x1− An
2(x2 − x1) (5.9)
2) s′′(xn) = Bn daca si numai daca
sn−1 + 2sn = 3yn − yn−1
xn − xn−1+
Bn
2(xn − xn−1). (5.10)
3) s′′′(x2−) = s′′′(x2+) daca si numai daca
(x3 − x2)s1 + (x3 − x1)s2 = d1 (5.11)
unde
d1 =y2 − y1
x2 − x1
[x2 − x1
x3 − x1+ 2
](x3 − x2) +
y3 − y2
x3 − x2· (x2 − x1)2
x3 − x1
4) s′′′(xn−1−) = s′′′(xn−1+) daca si numai daca
(xn − xn−2)sn−1 + (xn−1 − xn−2)sn = dn (5.12)
dn =(xn − xn−1)2
xn − xn−2· yn−1 − yn−2
xn−1 − xn−2+
[2+
xn − xn−1
(xn − xn−2
]·(xn−1−xn−2)
yn − yn−1
xn − xn−1
Demonstratie. Ecuatiile (5.8) se obtin din Teorema 2.6 luınd yi = s(xi),i = 1, . . . , n
• Din Propozitia 2.2 rezulta ca pe intervalul [x1, x2] functia s′′ are formas′′(x) = c3,1 + c4,1(x− x1), deci s′′(x1) = An revine la c3,1 = An, adica
s′′(x1) = c3,1 = 6y2 − y1
(x2 − x1)2 − 4s1 + 2s2
x2 − x1= An
de unde2s1 + s2 = 3
y2 − y1
x2 − x1− An
2(x2 − x1) (5.13)
• Pe intervalul [xn−1, xn] functia s′′ are forma
s′′(x) = c3,n−1 + c4,n−1(x− xn−1)

§5. Interpolare cu functii spline 121
deci s′′(xn) = Bn revine la
c3,n−1 + c4,n−1(xn − xn−1 = Bn
adica6
yn − yn−1
xn − xn−1− 4
sn−1 + 2sn
xn − xn−1+
+6
(xn − xn−1)2[sn + sn−1 − 2
yn − yn−1
xn − xn−1
](xn − xn−1) = Bn
de undesn−1 + 2sn = 3
yn − yn−1
xn − xn−1+
Bn
2(xn − xn−1) (5.14)
• s′′′(x2−) = s′′′(x2+) daca si numai daca c4,1 = c4,2 adica
6(x2 − x1)2
(s2 + s1 − 2
y2 − y1
x2 − x1
)=
6(x3 − x2)2
(s3 + s2 − 2
y3 − y2
x3 − x2
).
Pe de alta parte
(x3 − x2)s1 + 2(x3 − x1)s2 + (x2 − x1)s3 =
= 3[ y3 − y2
x3 − x2(x2 − x1) +
y2 − y1
x2 − x1(x3 − x2)
]
(prima ecuatie a sistemului (5.8). Eliminınd s3 dintre cele doua relatiiobtinem relatia (5.12).
• s′′′(xn−1−) = s′′′(xn−1+) daca si numai daca c4,n−2 = c4,n−1, adica
6(xn − xn−1)2
(sn−1 + sn−2 − 2
yn−1 − yn−2
xn−1 − xn−2
)=
=6
(xn − xn−1)2(sn + sn−1 − 2
yn − yn−1
xn − xn−1
).
Pe de alta parte
(xn − xn−1)sn−2 + 2(xn − xn−2)sn−1 + (xn−1 − xn−2)sn =
= 3[ yn − yn−1
xn − xn−1(xn−1 − xn−2) +
yn−1 − yn−2
xn−1 − xn−2(xn − xn−1)
]
(ultima ecuatie din (5.8)). Eliminınd sn−2 ıntre relatiile de mai sus obtinem(5.13). 2

122 Capitolul 2. Metode de interpolare
Sistemul de ecuatii algebrice din care se determina vectorul (s1, · · · , sn), undesi = s′(xi), este de forma:
b1 c1
a2 b2 c2
a3 b3 c3
. . . . . . . . .. . . . . . . . .
an−1 bn−1 cn−1
an bn
·
s1
s2
s3......sn−1
sn
=
d1
d2
d3......dn−1
dn
(5.15)
2
undeai = xi+1 − xi, bi = 2(xi+1 − xi−1), ci = xi − xi−1
di = 3[ yi − yi−1
xi − xi−1(xi+1 − xi) +
yi+1 − yi
xi+1 − xi(xi − xi−1)]
cınd i = 2, . . . , n− 1 si
b1 = 1, c1 = 0, d1 = αn ın cazul I),
b1 = 2, c1 = 1, d1 = 3(y2 − y1)/x2 − x1)−An(x2 − x1)/2 ın cazul II),
b1 = x3 − x2, c1 = x3 − x1,
d1 =y2 − y1
x2 − x1[x2 − x1
x3 − x1+ 2](x3 − x2) +
y3 − y2
x3 − x2· (x2 − x1)2
x3 − x1
ın cazul III),
b1 = 1, c1 = 0, d1 = λ′1(x1) ın cazul IV)
iar
an = 0, bn = 1, d1 = βn ın cazul I),
an = 1, bn = 2, dn = 3(yn − yn−1)(xn − xn−1)
+ Bn(xn − xn−1)
2ın cazul II),
an = xn − xn−1, bn = xn−1 − xn−2,
dn =(xn − xn−1)2
xn − xn−2· yn−1 − yn−2
xn−1 − xn−2+
[2+
xn − xn−1
(xn − xn−2
]·(xn−1−xn−2)
yn − yn−1
xn − xn−1
ın cazul III),
an = 0, bn = 1, dn = λ′n(xn) ın cazul IV)

§5. Interpolare cu functii spline 123
Propozitia 5.2 Sistemul (5.15) obtinut prin considerarea conditiilor de tipulI), II) III) sau IV) si sistemul (5.8) se poate rezolva stabil utilizınd eliminareagausiana fara pivotare.
Demonstratie. Observam ca sistemul (5.15) a fost obtinut prin conside-rarea ecuatiilor din liniile 2, . . . , n− 1 drept ecuatiile sistemului (5.8), primaecuatie fiind obtinuta prin considerarea conditiilor impuse punctului x1 pen-tru tipul I) si II) ,IV) si ın punctul x2 pentru tipul III), iar ultima ecuatiese obtine prin considerarea conditiilor impuse ın punctul xn pentru cazurileI), II), IV) si conditia ın punctul xn−1 ın cazul III).
Consideram urmatoarele 4 cazuri:
1) Prima ecuatie nu este ecuatia (5.11), iar ultima ecuatie nu este ecuatia(5.12). In acest caz b1 > c1 si bn > an, deci sistemul este diagonal dominantsi se poate rezolva utilizınd eliminarea gaussiana fara pivotare.
2) Prima ecuatie este ecuatia (5.11), iar ultima ecuatie nu este ecuatia(5.12). In acest caz, scazınd prima ecuatie a sistemului din ecuatia a doua,sistemul se transforma ıntr-un sistem tridiagonal de forma:
b1 c1
0 b′2 c′2a3 b3 c3
. . . . . . . . .. . . . . . . . .
an bn
·
s1
s2
s3......sn
=
d1
d′2d3......dn
unde a′2 = 0. , b′2 = b2 − c1 = x3 − x1, c′2 = c2 = x2 − x1, d′2 = d2 − d1
deci b′2 > c′2 si prin urmare sistemul poate fi rezolvat utilizınd eliminareagausiana fara pivotare, deoarece sistemul pentru necunoscutele s2, · · · , sn
este diagonal dominant.
3) Prima ecuatie nu este (5.11) iar ultima ecuatie este (5.12); In acest caz,scazınd ultima ecuatie din penultima, sistemul se transforma

124 Capitolul 2. Metode de interpolare
ıntr-un sistem echivalent de forma
b1 c1
a2 b2 c2
a3 b3 c3
. . . . . . . . .. . . . . . . . .
a′n−1 b′n−1 0an bn
·
s1
s2
s3......sn−1
sn
=
d1
d2
d3......d′n−1
dn
unde a′n−1 = an−1 = xn − xn−1, b′n−1 = bn−1 − an = xn − xn−2, c′n−1 = 0,d′n−1 = dn − dn−1, deci b′n−1 > a′n−1 deci sistemul pentru necunoscuteles1, · · · , sn−1 este diagonal dominant si se poate rezolva utilizınd eliminareagausiana fara pivotare.
4) Prima ecuatie este ecuatia (5.11), iar ultima ecuatie este (5.12). Inacest caz, scazınd prima ecuatie din a doua si ultima ecuatie din penultima,sistemul se transforma ıntr-un sistem tridiagonal echivalent de forma:
b1 c1
0 b′2 c′2a3 b3 c3
. . . . . . . . .. . . . . . . . .
a′n−1 b′n−1 0an bn
·
s1
s2
s3......sn−1
sn
=
d1
d′2d3......d′n−1
dn
unde b′2 = b2 − c1 = x3 − x1, c′2 = c2 = x2 − x1, d′2 = d2 − d1,a′n−1 = an−1 = xn − xn−1 6= 0, b′n−1 = bn−1 − an = xn − xn−2, c′n−1 = 0,d′n−1 = dn−1−dn. In sistemul transformat, pentru necunoscutele s2, · · · , sn−1
se poate rezolva prin metoda eliminarii gaussiene fara pivotare, fiind diagonaldominant.
Cum cele patru cazuri epuizeaza situatiile care pot apare, rezulta ca sistemul(5.15) a putut fi rezolvat utilizınd eliminarea gaussiana fara pivotare. 2
Propozitia 5.3 Fie s ∈ S3(∆n) o functie spline periodica, adicas(x1) = s(xn), s′(x1) = s(xn), s′′(x1) = s′′(xn).
1) Vectorul (s1, . . . , sn−1)T unde si = s′(xi), i = 1, · · · , n − 1 verifica

§5. Interpolare cu functii spline 125
sistemul algebric
2(xn − xn−1 + x2 − x1)s1 + (xn − xn−1)s2 + (x2 − x1)sn−1 = d1
(xi+1 − xi)si−1 + 2(xi+1 − xi−1)si + (xi − xi−1)si+1 = di
i = 2, . . . , n− 2
(xn−1 − xn−2)s1 + (xn − xn−1)sn−2 + 2(xn − xn−2)sn−1 = dn−1
(5.16)unde
d1 = 3[ y2 − y1
x2 − x1(xn − xn−1) +
yn − yn−1
xn − xn−1(x2 − x1)
]
di = 3[ yi+1 − yi
xi+1 − xi(xi − xi−1) +
yi − yi−1
xi − xi−1(xi+1 − xi)
], i = 2, · · · , n− 2
dn−1 = 3[ yn − yn−1
xn − xn−1(xn−1 − xn−2) +
yn−1 − yn−2
xn−1 − xn−2(xn − xn−1)
].
2) Sistemul de mai sus se rezolva stabil utilizınd eliminarea gaussiana farapivotare.
Demonstratie. Ecuatia de pe prima linie a sistemului de mai sus se obtineconsiderınd s1 = sn si s′′(x1) = s′′(xn). Intr-adevar
s′′(x1) = c3,1 = 6y2 − y1
(x2 − x1)2− 4s1 + 2s2
x2 − x1
si
s′′(xn) = c3,n−1 + c4,n−1(xn − xn−1) = −6yn − yn−1
(xn − xn−1)2+
4sn + 2sn−1
xn − xn−1.
Din s′′(x1) = s′′(xn) si tinınd seama de relatiile de mai sus obtinem
3y2 − y1
(x2 − x1)2− 2s1 + s2
x2 − x1= −3
yn − yn−1
(xn − xn−1)2+
2sn + sn−1
xn − xn−1
de unde dupa ınmultirea cu (xn − xn−1)(x2 − x1) si tinınd seama de faptulca sn = s1 obtinem prima ecuatie a sistemului (5.16 ). Ultima ecuatiea sistemului (5.16) se obtine din ecuatia a n − 1 din sistemul (5.8) luındsn = s1. Ecuatiile pentru i = 2, . . . , n−2 sınt tocmai ecuatiile de pe pozitiilecorespunzatoare ale sistemului (5.8).

126 Capitolul 2. Metode de interpolare
Cum sistemul obtinut este diagonal dominant, rezulta ca sistemul admitesolutie unica pentru orice y1, · · · , yn−1, deci problema de interpolare ın cazulfunctiilor spline cubice periodice admite o solutie unica, solutie ce se de-termina rezolvınd sistemul (5.16) si apoi cu valorile s1, · · · , sn−1, s1 si cuvalorile date y1, · · · , yn−1, y1 se determina pe fiecare interval functia splinecubica conform Propozitiei 2.2. 2
Eroarea de interpolare prin functii spline cubice
Vom da, ın continuare, evaluari ale erorii pe care o facem ınlocuind o functieg cu o functie spline cubica s ∈ S3(∆n) cu proprietatile
s(xi) = g(xi), i = 1, . . . , n (5.17)
Propozitia 5.4 Daca g este o functie de doua ori derivabila, iars ∈ S3(∆n) verifica (5.17) atunci
∫ b
ae′′(x)ϕ(x)dx = (eϕ)′(b)− (eϕ)′(a), ∀ϕ ∈ S1(∆n)
unde e = g − s
Demonstratie.∫ b
ae′′(x)ϕ(x)dx = e′(x)ϕ(x) |ba −
∫ b
ae′(x)ϕ′(x)dx =
= e′(b)ϕ(b)− e′(a)ϕ(a)−n−1∑
i=1
∫ xi+1
xi
e′(x)ϕ′(x)dx =
= e′(b)ϕ(b)− e′(a)ϕ(a)−n−1∑
i=1
ϕ′(x)e(x)∣∣∣xi+1
xi
=
= e′(b)ϕ(b)− e′(a)ϕ(a)−n−1∑
i=1
e(xi+1ϕ′(xi+1) +
n−1∑
i=1
e(xi)ϕ′(xi)
= e′(b)ϕ(b)− e′(a)ϕ(a)−n∑
i=2
e(xi)ϕ′(xi) +n−1∑
i=1
e(xi)ϕ′(xi) =
= e′(b)ϕ(b)− e′(a)ϕ(a)− e(b)ϕ′(b) + e(a)ϕ′(a) =
= (eϕ)′(b)− (eϕ)′(a) =∫ b
a(eϕ)′′(x)dx
2

§5. Interpolare cu functii spline 127
Eroarea de interpolare si caracterizarea variationala a functiilorspline cubice complete de interpolare
O functie s ∈ S3(∆n) se numeste spline cubic complet de interpolarepentru functia g daca:
s(xi) = g(xi), i = 1, . . . , n si s′(x1) = g′(x1), s′(xn) = g′(xn).
Operatorul care asociaza unei functii g, functia spline cubica de interpolarecompleta ıl notam cu I3.
Lema 5.1 Daca g este de doua ori derivabila atunci derivata secunda aerorii de interpolare e = g − I3(g) este ortogonala pe S1(∆n), adica
∫ b
ae′′(x)ϕ(x)dx = 0, ∀ ϕ ∈ S1(∆n) (5.18)
Demonstratie. Cum pentru orice ϕ ∈ S1(∆n) avem (eϕ)′(b)−(eϕ)′(a) = 0,rezulta , utilizınd Propozitia 5.4, ca e′′ este ortogonal pe S1(∆n). 2
Teorema 5.4 (Pitagora) Pentru orice functie g ∈ C2([a, b]) are loc iden-titatea
∫ b
a[g′′(x)]2dx =
∫ b
a[I3(g)′′(x)]2dx +
∫ b
a[(g − I3(g))′′(x)]2dx
Demonstratie. Luınd e = g − I3(g) avem
∫ b
a[g′′(x)]2dx =
∫ b
a[I3(g)′′(x) + e′′(x)]2dx =
=∫ b
a[I3(g)′′(x)]2dx + 2
∫ b
aI3(g)′′(x)e′′(x)dx +
∫ b
a[e′′(x)]2dx.
Dar 2∫ b
a(Ig)′′(x)e′′(x)dx = 0, deoarece I3(g)′′ ∈ S1(∆n) deci are loc identi-
tatea din enunt. 2
Propozitia 5.5 Daca y1, . . . , yn, y′1, y′n sınt numere reale arbitrare, iar
En = f ∈ C2([a, b]); f(xi) = yi i = 1, . . . n si f ′(x1) = y′1, f′(xn) = y′n

128 Capitolul 2. Metode de interpolare
atunciF(s) = inf
f∈En
F(f)
unde s ∈ S3(∆n)∩En iar F(g) =∫ b
a[g′′(x)]2dx si este unica functie din En
care minimizeaza functionala F pe En.
Demonstratie. Cum pentru orice f ∈ En avem I3(f) = I3(s) = s rezulta
∫ b
a[f ′′(x)]2dx =
∫ b
a[I3(f)′′(x)]2 +
∫ b
a[f ′′ − I3(f)′′(x)]2dx ≥
≥∫ b
a[I3(f)′′(x)]2dx =
∫ b
a[I3(s)′′(x)]2dx =
∫ b
a[s′′(x)]2dx.
Egalitatea are loc daca si numai daca f ′′ = I3(g)′′, adica f ′′ = s′′, caredatorita conditiilor de interpolare este echivalenta cu f = s( f(x)− s(x) = Ax + B si cum f , s ∈ En rezulta A = B = 0). 2
6 Interpolare in mai multe dimensiuni
In §4 si §5 ne-am ocupat de interpolarea unidimensionala, adica interpolareaunei functii de o variabila reala prin polinoame sau functii spline. Problemainterpolarii unei functii de mai multe variabile se pune asemanator. Vomda ca exemplu interpolarea Lagrange. Sa presupunem ca se dau: un ıntregk ≥ 1, Pk spatiul polinoamelor de grad ≤ k definite pe Rn si N = dim(Pk)puncte distincte din Rn, a1, . . . aN . Dındu-se αi, 1 ≤ i ≤ N, numere reale,se cere determinarea unui polinom p ∈ Pk astfel ca
p(ai) = αi 1 ≤ i ≤ N. (6.1)
Am vazut ca daca n = 1, problema Lagrange avea solutie unica. Nu acelasilucru se ıntımpla pentru cazul n ≥ 2.
Fie n = 2, k = 1 si a1 = (0, 0), a2 = (−1,−1), a3 = (1, 1). In acest cazN = dim(P1) = 3.
• Pentru α1 = 1, α2 = α3 = 0 nu exista un polinom de gradul ıntıi cuproprietatea
p(ai) = αi i = 1, 2, 3 (6.2)

§6. Interpolare in Rn 129
• Pentru α1 = 1, α2 = α3 = 1 avem o infinitate de polinoame de gradulıntıi cu proprietatea
p(ai) = αi, i = 1, 2, 3 (6.3)
Intr-adevar, orice polinom de gradul ıntıi ın doua variabile are forma
p = α + βx + γy.
Daca ar exista un p care sa verifice (6.2) ar trebui ca (α, β, γ) sa verificesistemul
1 = α0 = α− β − γ0 = α + β + γ
(6.4)
Dar sistemul (6.4) este incompatibil, in timp ce orice polinom de formap = 1 + β(x− y) cu β ∈ R, verifica (6.3).
6.1 P - unisolventa
Pentru a sti cınd o problema de interpolare are solutie unica se folosestenotiunea de unisolventa.
Definitia 6.1 Daca P este un spatiu de functii finit dimensional, iarΣ = φ1, . . . , φN o multime de functionale liniare si continue pe P, sespune ca Σ este P-unisolventa daca oricare ar fi scalarii α1, . . . , αN existasi este unic un element p ∈ P astfel ca
φj(p) = αj , ∀ j = 1, . . . , N (6.5)
Se observa ca Σ este o baza pentru spatiu finit dimensional P′, adica dim(P ′) =dim(sp(Σ)). Este usor de vazut ca daca Σ este P-unisolventa exista o bazap1, . . . , pN a lui P care verifica
φi(pj) = δij , i, j ∈ 1, . . . , N. (6.6)
Intr-adevar, din P-univalenta lui Σ, pentru orice 1 ≤ j ≤ N , luınd scalariα = (α1, . . . , αN ) de forma αi = δij , exista pj ∈ P astfel ca
φi(pj) = δij , i, j ∈ 1, . . . ,N. (6.7)

130 Capitolul 2. Metode de interpolare
Elementele p1, . . . , pN sınt liniar independente si formeaza o baza pentru P,deoarece orice p ∈ P se reprezinta ın mod unic sub forma
p =N∑
i=1
φi(p)pi (6.8)
In teoria elementului finit elementele multimii Σ formeaza multimea vari-abilelor nodale sau multimea gradelor de libertate iar baza duala p1, · · · , pNeste baza nodala pentru P sau baza formata cu functiile de forma).
Apare, natural, urmatoarea ıntrebare. Cum poate fi verificata P-unisolventaunei multimi Σ ?
• O conditie necesara pentru ca o multime Σ sa fie P-unisolventa este ca
dim(P ) = card(Σ) (6.9)
Daca conditia necesara (6.9) este verificata, doua criterii simple se folosescın practica pentru P-unisolventa multimii Σ.
1) Este suficient sa se verifice ca singura functie p din P care se anuleazape Σ este functia identic nula. In fapt, cınd acesta proprietate estesatisfacuta, aplicatia liniara L : P → RN definita prin
L(p) = (φ1(p), . . . , φn(p))
este injectiva, deci bijectiva, deoarece P are dimensiunea finita N.
2) Este suficient sa se determine, de asemenea, functiile p1, . . . , pN careverifica (6.6).
De fapt, avem urmatorul rezultat care simplifica verificarea P-unisolventeiunei multimi Σ.
Lema 6.1 Fie P un spatiu vectorial d-dimensional, de functii din Rn, si fieφ1, . . . , φd ⊆ P′. Urmatoarele doua afirmatii sınt echivalente:
a) Multimea φ1, . . . , φd formeaza o baza pentru P′.
b) Daca p ∈ P si φi(p) = 0 pentru i ∈ 1, . . . , d atunci p ≡ 0.

§6. Interpolare in Rn 131
Demonstratie. a) ⇒b). Fie φ1, . . . φd o baza pentru P′ si p1, . . . , pdbaza duala pentru P. Pentru p ∈ P exista y1, . . . , yd din R astfel ca p =y1p1 + · · ·+ ynpn. Din φi(p) = 0 obtinem yi = 0 pentru orice i ∈ 1, . . . , d,deci p = 0.
b) ⇒ a) . Fie p1, . . . , pd ⊂ P o baza pentru P. Pentru orice v ∈ P existaβ1, . . . , βd ∈ R astfel ca v = β1p1 + · · ·+ βdpd. Dar φi(v) = 0 inseamna
β1φi(p1) + · · ·βdφi(pd) = 0 ∀ i = 1, . . . , d
si cum v = 0 rezulta β1 = · · · = βd = 0 deci detC 6= 0, unde cij = φi(pj).
Fie α1, . . . , αd cu α1φ1 + . . . αdφd = 0. Dar aceasta ınseamna
α1φ1(pj) + · · ·+ αdφd(pj) = 0 ∀ j = 1, . . . , d
deci CT α = 0 de unde α = 0. Cum P are dimensiunea d si φ1, · · · , φd sıntliniari independenti rezulta ca φ1, · · · , φd este o baza. 2
6.2 Interpolarea prin polinoame
Fie e1, . . . en baza canonica din Rn. Orice element x ∈ Rn se poatereprezenta ın mod unic prin (x1, . . . , xn) unde x = x1e1 + · · · + xnen. Pen-tru k ∈ Z+ se noteaza cu Pk multimea tuturor polinoamelor ın variabilex = (x1, . . . , xn) avınd gradul cel mult k, adica p ∈ Pk se scrie sub forma
p =∑
|α|≤k
aαxα =∑
α1+···αn≤k
a(α1,...,αn)xα11 · · ·xαn
n (6.10)
unde α = (α1, . . . , αn) ∈ Zn+ este un multiindice n-dimensional iar
|α| = α1 + · · ·+ αn este lungimea sa.
Pentru k ∈ Z+ se noteaza cu Qk multimea tuturor polinoamelor ın variabilelex = (x1, . . . , xn) avınd gradul cel mult k ın fiecare variabila xi, adica p ∈ Qk
se scrie sub formap =
∑
α∈A
aαxα (6.11)
unde A = α = (α1, . . . , αn) ∈ Zn+; 0 ≤ αi ≤ k, i = 1, . . . , n.
Propozitia 6.1 Fie k un ıntreg ≥ 0.
1) Multimea Pk a polinoamelor ın n variabile de grad cel mult k este unspatiu finit dimensional si
dim(Pk) = Ckn+k.

132 Capitolul 2. Metode de interpolare
2) Multimea Qk a polinoamelor ın n-variabile de gradul cel mult k ınfiecare variabila formeaza un spatiu finit dimensional si
dim(Qk) = (k + 1)n.
Demonstratie. 1) Multimea polinoamelor omogene de grad m ın n-variabileeste Cm
n+m−1. Intr-adevar, un monom xα cu |α| = m se poate reprezenta prinm puncte separate prin n− 1 virgule. Cum cele n− 1 virgule pot fi plasateın Cn−1
n+m−1 = Cmn+m−1 moduri obtinem ca numarul monoamelor de ordinul
m este egal cu Cnm+n−1. Dar dimensiunea spatiului Pk este egala cu numarul
monoamelor de grad cel mult k, deci dim(Pk) =∑k
m=0 Cmn+m−1 = Cn
n+k
2) In fiecare variabila putem avea cel mult (k + 1) polinoame deci ın totaldimensiunea spatiului Qk este (k + 1)n. 2
In analiza exemplelor ce vor fi prezentate ın continuare de un real folos esteurmatorul rezultat.
Lema 6.2 Daca l este o functionala liniara nenula pe Rn iar p este un poli-nom avınd gradul k care se anuleaza pe hiperplanul H definit prinH = x ∈ Rn, l(x) = α atunci exista un polinom de grad cel mult k − 1astfel ca p(x) = (l(x)− α)q(x), pentru orice x ın Rn.
Demonstratie. Functionala l fiind liniara si nenula pe Rn exista α1, . . . , αn
numere reale nu toate nule astfel ca l(x) = α1x1 + · · · + αnxn pentru oricex = (x1, · · · , xn) ∈ Rn. Daca αn 6= 0, atunci transformarea χ definita prin
y1 = x1, . . . , yn−1 = xn−1, yn = α1x1 + · · ·+ αnxn − α (6.12)
este o schimbare de variabila regulata ın Rn iar ecuatia hiperplanului Hdevine
H = y = (y1, . . . , yn) ∈ Rn; yn = 0iar p = p χ−1 este un polinom de gradul cel mult k ın y = (y1, . . . , yn) ceare forma
p(y, yn) =k∑
j=0
∑
|β|≤k−j
c(β,j)yβyj
n
unde y = (y1, . . . , yn−1) iar β = (β1, . . . βn−1) ∈ Zn−1+ Cum p se anuleaza pe
H rezulta ca p se anuleaza pe H deci p(y, 0) = 0 ∀ y ∈ Rn−1 de unde∑
β|≤k
cβ,0yβ = p(y, 0) = 0

§6. Interpolare in Rn 133
deci cβ,0 = 0 pentru |β ≤ k. Prin urmare
p(y, yn) =k∑
j=1
∑
|β|≤d−j
c(β,j)yβyj
n =
yn
k∑
j=1
∑
|β|≤k−j
c(β,j)yβyj−1
n = yn · q(y, yn)
unde q este un polinom avınd gradul cel mult k − 1. Deci
p(x) = (α1x1 + · · ·+ αnxn − α)q(x1, . . . , xn−1, α1x1 + . . . + αxn) =
(α1x1 + · · ·+ αnxn − α)q(x1, . . . , xn).
2
Interpolarea cu polinoame din Pk
In Rn un n-simplex (nedegenerat ) K este acoperirea convexa a (n + 1)puncte
aj = (a1,j , . . . , an,j) ∈ Rn, j = 1, . . . , n + 1
pentru care matricea
A =
a1,1 a1,2 . . . a1,n+1...
...an,1 an,2 . . . an,n+1
1 1 . . . 1
(6.13)
este nesingulara (echivalent, cele n + 1 puncte aj nu sınt continute ıntr-unhiperplan ). Deci, avem
K =x =
n+1∑
j=1
λi(x)aj ; 0 ≤ λj ≤ 1,n+1∑
j=1
λj = 1.
Orice punct x = Rn, de coordonate carteziene x1, . . . , xn, este unic reprezen-tat de coordonatele baricentrice λ1(x), . . . , λn+1(x) definite ca solutie a sis-temului liniar
n+1∑
j=1
ai,jλj = xi 1 ≤ i ≤ n
n+1∑
j=1
λj = 1(6.14)

134 Capitolul 2. Metode de interpolare
a carei matrice este matricea inversabila A definita ın (6.13). Functiile
x → (λ1(x), . . . , λn+1(x)))
se numesc coordonate baricentrice, ın raport cu punctele a1, . . . , an+1, apunctului x. Din (6.14) se observa ca, pentru orice x, coordonatele baricen-trice sınt functii afine ın x1, . . . , xn, (adica apartin spatiului P1) si
λi(x) =n∑
j=1
bijxj + bn+1,i 1 ≤ i ≤ n + 1
unde B = (bij) este inversa matricei A.
Folosind coordonatele baricentrice putem da cıteva rezultate de reprezentarea polinoamelor din Pk ın n variabile.
Propozitia 6.2 Orice polinom de gradul ıntıi ın n variabile este unicdeterminat de valorile sale ın n + 1 puncte ne situate ın acelasi hiperplan.
Demonstratie. Fie a1, . . . , an+1, puncte nesituate ın acelasi hiperplan.Coordonatele baricentrice λ1, . . . , λn+1 ın raport cu a1, . . . , an+1 sınt poli-noame de gradul ıntıi si sınt liniar independente. Intr-adevar, din∑n+1
j=1 αjλj = 0 rezulta
n+1∑
j=1
αjλj(ai) = 0 1 ≤ i ≤ n + 1
si cum λj(ai) = δij obtinem α1 = 0, . . . , αn+1 = 0. Cum dim(P1) = n + 1 =C1
n+1, rezulta ca pentru orice polinom p ∈ P1 exista α1, . . . , αn+1 astfel ca
p =n+1∑
j=1
αjλj ,
de unde, tinınd seama ca λj(ai) = δij obtinem αj = p(aj), deci
p =n+1∑
j=1
p(aj)λj
2
Pentru un polinom p de grad k ≥ 1 avem urmatorul rezultat.

§6. Interpolare in Rn 135
Teorema 6.1 (Nicolaides) Fie K un n-simplex cu vırfurile a1, . . . , an+1.Pentru un ıntreg k ≥ 1, orice polinom p ∈ Pk este unic determinat devalorile sale ın multimea
Lk(K) =x =
n∑
j=1
λjaj ; λj ∈ 0,1k, · · · , k − 1
k, 1,
n+1∑
j=1
λj = 1.
Demonstratie. Un punct oarecare din Lk(K) este de forma
aµ =n+1∑
i=1
µi
kai, µ = (µ1, · · · , µn+1)
unde ıntregii µi verifica relatiile 0 ≤ µi ≤ k si∑n+1
i=1 µi = k. Fiecarui punctaµ din Lk(K) ıi asociem functia pµ : Rn → R definita prin
pµ(x) =(n+1∏
i=1
µi!)−1 ×
n+1∏
i=1,µi≥1
( µi−1∏
j=0
kλi(x)− j)
(6.15)
unde λi(x), 1 ≤ i ≤ n + 1, sınt coordonatele baricentrice ale punctului xın raport cu punctele a1, · · · , an+1. Cum λi sınt polinoame de gradul ıntıi ınx1, . . . , xn rezulta ca pµ ∈ Pk. Mai mult pµ(aµ) = 1 si pµ(aν) = 0 pentruorice aν ∈ Lk(K), aν 6= aµ. Intr-adevar, functia λi este afina, deci
kλi(aµ)− j = kλi
(n+1∑
l=1
µl
kal
)− j = k
n+1∑
l=1
µl
kλi(al)− j =
=n+1∑
l=1
µlδil − j = µi − j
de undeµi−1∏
j=0
(kλi(aµ)− j
)=
µi−1∏
j=0
(µi − j) = µi!
deci
pµ(aµ) =(n+1∏
i=1
µi!)−1 ×
( n+1∏
i=1,µi≥1
µi!)
= 1.
Pe de alta parte, fie aν ∈ Lk(K) un punct distinct de aµ, adica
aν =n+1∑
l=1
νl
kal cu 1 ≤ νi ≤ k.

136 Capitolul 2. Metode de interpolare
Avem
pµ(aν) =(n+1∏
i=1
µi!)−1 ·
µi−1∏
i=1,µi≥1
νi(νi − 1) · · · (νi − µi + 1).
Punctele aµ si aν fiind distincte, exista un indice i0 astfel ca νi0 < µi0 , deunde νi0−µi0 +1 ≤ 0. Cum νi0 ≥ 0 produsul νi0(νi0−1) · · · (νi0−µi1 +1) esteın mod necesar nul, ca produs de numere ıntregi consecutive, primul pozitivsi ultimul negativ, exista unul nul si avem pµ(aν) = 0. Polinoamele pµ cuaµ ∈ Lk(K) constituie o baza pentru Pk, deoarece sınt liniar independentesi card(Lk(K)) = Ck
n+k = dim(Pk). 2
Ca o consecinta, a celor de mai sus, putem sa demonstram teorema urmatoare.
Teorema 6.2 Fie a1, . . . , an+1 vırfurile n-simplexului K, adica K esteacoperirea convexa a punctelor a1, . . . , an+1, k un ıntreg ≥ 1 si Σk multimeafunctionalelor liniare pe Pk de forma φµ(f) = f(aµ) cu aµ ∈ Lk(K). AtunciΣk este Pk-unisolventa.
Demonstratie. In demonstratia teoremei lui Nicolaides s-a aratat ca poli-noamele pµ definite prin (6.15) au urmatoarele proprietati: 1) pµ ∈ Pk;2) pµ(aµ) = 1; 3) pµ(aν) = 0 pentru orice aν ∈ Lk(K) cu aν 6= aµ.Rezulta, prin urmare φµ(pµ) = pµ(aµ) = 1 si φν(pµ) = pµ(aν) = 0 si folosindteorema Nicolaides avem ca orice polinom p ∈ Pk se reprezinta ın mod unicsub forma
p =∑
aµ∈LK
φµ(p)pµ
de unde rezulta ca Σk este Pk-unisolventa. 2
Si acum cıteva exemple.
1) Fie n = 2 si a1, a2, a3 puncte distincte din R2 necoliniare. LuındΣ = φ1, φ2, φ3 unde φ1(f) = f(a1), φ2(f) = f(a2), φ3(f) = f(a3) seobtine, utilizınd Teorema 6.2, ca Σ este P1-unisolventa. Orice polinomp ∈ P1 se reprezinta ın mod unic sub forma
p = p(a1)λ1 + p(a2)λ2 + p(a3)λ3
unde λ1, λ2, λ3 sınt coordonatele baricentrice ale lui x ın raport cupunctele a1, a2, a3.

§6. Interpolare in Rn 137
2) Pentru n = 2, iar a1, a2, a3 puncte distincte necoliniare din R2, luındΣ′ = φ1, φ2, φ3 unde
φ1(f) = f(a2 + a3
2), φ2(f) = f(
a1 + a3
2), φ3(f) = f(
a1 + a2
2)
se obtinem ca Σ′ este P1-unisolvent. Daca λ1, λ2, λ3 sınt coordonatelebaricentrice ın raport cu punctele
a′1 =a2 + a3
2, a′2 =
a1 + a3
2, a′3 =
a1 + a2
2atunci orice polinom din P1 se reprezinta ın mod unic sub forma
p = p(a′1)pj + p(a′2)p2 + p(a′3)p2
undepj = −λj + λj+1 + λj+2, j = 1, 2, 3
3) Pentru n = 2 si a1, a2, a3 puncte distincte necoliniare din R2, luındΣ = φ1, · · · , φ6 unde φ1(f) = f(a1), φ2(f) = f(a2), φ3(f) = f(a3),
φ4(f) = f(a1 + a2
2), φ5(f) = f(
a2 + a3
2), φ6(f) = f(
a1 + a3
2). obtinem
ca Σ este P2-unisolvent iar polinoamele
p1 = λ1(2λ1 − 1), p2 = λ2(2λ2 − 1), p3 = λ3(2λ3 − 1)
p4 = 4λ1λ2, p5 = 4λ2λ3, p6 = 4λ1λ3
se bucura de proprietatea ca φi(pj) = δi,j .
4) Pentru n = 2 si a1, a2, a3 puncte distincte necoliniare din R2 luındΣ = φ1, . . . , φ10 unde
φi(f) = f(ai), φi+3(f) = ∂1f(ai), φi+6(f) = ∂2f(ai) cınd i = 1, 2, 3
siφ10(f) = f(
a1 + a2 + a3
3)
atunci Σ este P3 unisolventa.
Intr-adevar, presupunem ca p ∈ P3 si φi(p) = 0 pentru i = 1, . . . , 10.Restrictia lui p la [a2, a3] este un polinom de gradul trei ıntr-o variabila,care are doua radacini duble, deci p se anuleaza pe [a1a2]. La fel pse anuleaza pe [a1, a3] respectiv pe [a2, a3], deci p = cλ1λ2λ3. Dar
φ10(p) = 0, adica p(a1 + a2 + a3
3) = 0, deci 0 = c · 1
27, de unde rezulta
p = 0.

138 Capitolul 2. Metode de interpolare
Interpolarea cu polinoame din Qk
Fie K hipercubul unitate [0, 1]n din Rn. Consideram multimea de puncte
Θk = x = (x1, . . . , xn); xi ∈ 1, frac1k, . . . ,k − 1
k, 1, i = 1, . . . , n
si observam cadim(Qk) = card(Θk) = (k + 1)n.
Teorema 6.3 Pentru orice intreg k pozitiv, multimea Θk este Qk -unisolventa.
Demonstratie. Fiecare punct xi ∈ Θk este de forma xi =( i1
k,i2k
, . . . ,ink
)
unde ij ∈ 0, 1, . . . , k 1 ≤ j ≤ n. fiecarui punct xi ıi asociem polinomul pi
din Qk definit prin formula
pi(x) =n∏
j=1
k∏
i′j=0,i′j 6=ij
(kxj − i′jij − i′j
).
Se verifica usor ca pi(xj) = δij , de unde rezulta ca Θk este Qk- unisolventa.2
Daca a1, a2, a3, a4 sınt punctele din R2 de coordonate (0, 0), (1, 0), (1, 1), (0, 1)si Σ1 multimea functionalelor liniare de forma φi(f) = f(ai) atunci multimeaΣ1 este Q1 -unisolventa. Mai mult,
p1(x) = (1−x1)(1−x2), p2(x) = x1(1−x2), p3(x) = x1x2, p4(x) = x2(1−x1)
formeaza o baza pentru Q1.

Capitolul 3
Cea mai buna aproximare
Pornind de la problemele privind unele mecanisme (de pilda miscarea bieleiunei masini de abur ) P. L. Cebısev [11] ın 1853 a ajuns sa formuleze problemade a gasi, pentru o functie f ∈ C([a, b]), un polinom algebric g0 ∈ Pn
astfel ıncıt abaterea polinomului g0 de la functia f pe segmentul [a, b] sa fiecea mai mica posibila dintre toate abaterile tuturor polinoamelor algebriceg ∈ Pn, sau, cu alte cuvinte, problema celei mai bune aproximari afunctiei f prin polinoamele algebrice g din Pn.
In problemele de mecanica considerate, pentru masurarea abaterii dintre f sig pe segmentul [a, b], P. L. Cebısev a gasit ca fiind cel mai potrivit numarulmaxt∈[a,b] |f(t) − g(t)|; problema revine la minimizarea acestui maxim cındg parcurge multimea tuturor polinoamelor cu gradul mai mic sau egal cu n.
Pentru a putea include si alte cazuri importante, problema a fost generalizatade alti matematicieni, ınlocuindu-se [a, b] printr-un compact Q, iar poli-noamele algebrice g(t) =
∑ni=0 ait
i prin combinatii liniare g(q) =∑n
i=0 αigi(q)ale unui sistem de functii continue g0, g1, . . . , gn liniar independente pe Q,sau chiar prin elementele unei familii g(α1, . . . , αn; q) de functii continuepe Q, depinzınd de n parametrii scalari α1, . . . , αn.
Pe de alta parte, necesitatile practice au impus considerarea unor functiif, g nu neaparat continue, si masurarea abateri lor pe segmentul [a, b]
prin alte numere, de exemplu prin (∫ b
a|f(t)− g(t)|2dt)1/2 abaterea medie
patratica, folosita de exemplu ın metoda celor mai mici patrate,∫ b
a|f(t)−
g(t)|dt etc.
Evident, un polinom g0 care este solutia problemei de minim a lui Cebısev
139

140 Capitolul 3. Cea mai buna aproximare
nu este, ın general o solutie a problemei de minim care se obtin luınd unadin abaterile integrale de mai sus, si reciproc.
Functiile f si g, de mai sus pot fi considerate ca ”puncte ”f, g din ”spatii”maigenerale (de exemplu din spatiul tuturor functiilor continue pe [a, b], sau dinspatiul tuturor functiilor de patrat sumabil pe [a, b], etc. ), iar abaterea,de mai sus, dintre aceste functii poate fi considerata ca ”distanta”dintrepunctele f si g ın spatiu respectiv.
Problema celei mai bune aproximari revine atunci la problema gasirii, pentruun punct dat f si o multime data G dintr-un spatiu metric E, a unui punctg0 ∈ G care sa fie cel mai aproape de f dintre toate punctele multii G, adicaastfel ıncıt
ρ(f, g0) = infg∈G
ρ(f, g)
unde prin ρ se noteaza distanta din spatiul metric E. Pentru a obtine o teoriesatisfacatoare a celei mai bune aproximari, este convenabil sa observam caspatiile de functii considerate mai sus au si o structura vectoriala, adicasuma a doua functii din E este o functie din E si produsul unei functii dinE cu un scalar este o functie din E. De aceea, vom lua drept E nu un spatiumetric oarecare, ci un spatiu vectorial normat, natural, distanta din E estecea indusa de norma, adica
ρ(f, g) = ‖f − g‖, ∀ f, g ∈ E.
7 Cea mai buna aproximare in spatii normate
Problema celei mai bune aproximari consta deci ın a gasi, pentru un elementdat f si o multime G dintr-un spatiu normat E, un element g0 ∈ G astfelıncıt
‖f − g0‖ = infg∈G
‖f − g‖.
Orice g0 ∈ G cu aceasta proprietate se numeste element de cea mai bunaaproximare (prin elementele multimii G). Vom nota prin PG(f) multimeatuturor elementelor de cea mai buna aproximare ale lui f prin elementelemultimii G, adica
PG(f) = g0 ∈ G; ‖f − g0‖ = infg∈G
‖f − g‖,

§7. Cea mai buna aproximare in spatii normate 141
si pentru prescurtare, ın loc loc de ”g0 este un element de cea mai bunaaproximatie al lui f prin elementele multiimii G ”, vom scrie
g0 ∈ PG(f).
Studierea problemei celei mai bune aproximari ın cadrul general al spatiilornormate, are ıntre altele, urmatoarele avantaje fata de studierea ei cu aju-torul metodelor clasice de teoria functiilor:
a) Din rezultatele despre cea mai buna aproximare ın spatii normate seobtin drept cazuri particulare atıt rezultatele clasice bine cunoscutedin diverse spatii de functii concrete (spatiul functiilor continue, spatiulfunctiilor integrabile, etc.) cıt si o serie de rezultate noi ın aceste spatii;
b) In cadrul spatiilor normate problema celei mai bune aproximari revinela problema minimizarii unei distante, deci este geometrizata, si astfelın studiul ei se pot folosi rationamente bazate pe intuitia geometrica(dar finalmente riguros analitice ).
c) Intr-un cadru mai general, legaturile fenomenelor devin mai clare, iarrationamentele devin mai simple decıt ın unele cazuri particulare con-crete.
Observatia ca spatiile normate constituie cadrul natural ın care trebuie stu-diata problema celei mai bune aproximari a fost facuta, ın 1938 de MironNicolescu [65] si, independent, de M.G. Krein [51] care au obtinut si primelerezultate ın aceasta directie. O tratare unitara a problemei celei mai buneaproximari se gaseste ın excelenta monografie din 1967 a lui Ivan Singer [86].
Problemele care se pun ın legatura cu cea mai buna aproximare sınt existenta,unicitatea, caracterizarea elementului de cea mai buna aproximare, iar ınspatii concrete proiectarea de algoritmi pentru obtinerea elementului de ceamai buna aproximare.
In ceea ce priveste structura multimii PG(f) a elementelor de cea mai bunaaproximare pentru f prin elementele din G ⊂ E putem demonstra rezultatulurmator:

142 Capitolul 3. Cea mai buna aproximare
Propozitia 7.1 Daca G ⊂ E este o multime convexa atunci, pentru oricef ∈ E, multimea elementelor de cea mai buna aproximare, PG(f), este omultime convexa.
Demonstratie. Trebuie sa aratam ca daca g1, g2 ∈ PG(f) si t ∈ (0, 1) atuncitg1 + t(1− t)g2 ∈ PG(f). Cum g1, g2 ∈ PG(f) avem
‖f − g1‖ = ‖f − g2‖ = infg∈G
‖f − g‖ = dG(f)
si pentru orice t ∈ (0, 1) rezulta
dG(f) ≤ ‖f − tg1 − (1− t)g2‖ = ‖t(f − g1) + (1− t)(f − g2)‖ ≤≤ t‖f − g1‖+ (1− t)‖f − g2‖ = tdG(f) + (1− t)dG(f) = dG(f)
deci ‖f−tg1−(1−t)g2‖ = dG(f), de unde rezulta ca tg1 +(1−t)g2 ∈ PG(f).2
Remarca 7.1 Elementul, g0, de cea mai buna aproximare ın general, nueste unic.
Intr-adevar, fie E = R2 cu norma ‖·‖∞, adica ‖x‖∞ = max(|x1|, |x2|) pentrux = (x1, x2) ∈ E si G = (x1, 0);x1 ∈ R iar f = (2, 1). Pentru g = (x1, 0)avem ‖f − g‖∞ = max(|2− x1|, 1) ≥ 1, iar ‖f − g‖∞ = 1 pentru g = (2, 0).Deci infg∈G ‖f − g‖∞ = 1. Avem ınsa ‖f − g‖∞ = 1 pentru orice g = (x1, 0)pentru care 1 ≤ x1 ≤ 3.
Remarca 7.2 Daca G este un subspatiu din E iar G1 este un subspatiu ınG, atunci daca g ∈ G este cea mai buna aproximatie pentru f din E iarg1 ∈ G1 este cea mai buna aproximatie pentru g ın G1 atunci nu rezulta, ıngeneral ca g1 este cea mai buna aproximatie a elementului f ın G1.
Intr-adevar, fie E = R3 cu norma ‖ · ‖∞‖(x1, x2, x2)‖∞ = max(|x1|, |x2|, |x2|,
G = (x1, x2, 0);x1, x2 ∈ R si G1 = (x1, 0, 0);x1 ∈ RPentru f = (1, 2, 3) punctul g = (−2, 5, 0) are proprietatea ‖g − f‖∞ = 3 =infg∈G ‖f − g‖ iar punctul g1 = (−7, 0, 0) ∈ G1 are proprietatea
‖g1 − g‖∞ = 5 = infh∈G1
‖g − h‖.
Avem‖f − g1‖∞ = 8 iar inf
h∈G1
‖f − h‖ = 3.

§7. Cea mai buna aproximare in spatii normate 143
7.1 Caracterizarea elementelor de cea mai buna aproximare
Vom da ın cele ce urmeaza o caracterizare a elementelor de cea mai bunaaproximare, la ınceput cınd spatiul E este hilbertian, apoi cınd spatiul Eeste normat.
Teorema 7.1 Fie H un spatiu prehilbertian si G ⊂ H o multime convexa,f ∈ H\G si g0 ∈ G. Urmatoarele afirmatii sınt echivalente:
1) g0 ∈ PG(f);
2) Re (f − g0, g − g0) ≤ 0, ∀ g ∈ G;
3) Re (f − g, g0 − g) ≥ 0, ∀ g ∈ G.
Demonstratie. 1)⇒ 2). Fie g ∈ G. Pentru orice t ∈ (0, 1) avem (1− t)g0 +tg = g0 + t(g − g0) ∈ G. Cum 1) este presupusa adevarata avem:
‖f − g0‖2 ≤ ‖f − (g0 + t(g − g0))‖2 = ‖f − g0 − t(g − g0)‖2 == (f − g0 − t(g − g0), g − g0 − t(g − g0)) == ‖f − g0‖2 − t(g − g0, f − g0)− t(f − g0, g − g0) + t2‖g − g0‖2 == ‖f − g0‖2 + t2‖g − g0‖2 − 2tRe (f − g0), g − g0)
de unde rezulta 2Re(f −g0, g−g1) ≤ t‖g−g0‖2. Trecınd la limita, ın relatiade mai sus, cu t 0, avem Re (f − g0, g − g0) ≤ 0 adica 2).2)⇒ 3) Daca 2) este presupusa adevarata, rezulta ca pentru orice g din Gavem Re(f − g + g− g0, g− g0) ≤ 0 sau Re(f − g, g− g0) + ‖g− g0‖2 ≤ 0 deunde rezulta Re(f − g, g0 − g) ≥ ‖g − g0‖2.3)⇒ 1) Cum pentru orice x, y ∈ H avem
Re (x, y) =‖x + y‖2 − ‖x− y‖2
4
fie g ∈ G si g′ = (g + g0)/2 din G
0 ≤ Re(f − g′, g0 − g′) =‖f + g0 − 2g′‖ − ‖f − g0‖2
4=
=‖f − g‖2 − ‖f − g0‖2
4de unde rezulta ‖f − g‖ ≥ ‖f − g0‖, ∀ g ∈ G, adica g0 ∈ PG(f). 2

144 Capitolul 3. Cea mai buna aproximare
Teorema 7.2 Fie E un spatiu normat, G o multime convexa din E,f ∈ E\G si g0 ∈ G. Urmatoarele afirmatii sınt echivalente:
i) g0 ∈ PG(f);
ii) Exista F ∈ E∗ cu proprietatile
‖F‖E∗ = 1 (7.1)
ReF (g0 − g) ≥ 0, ∀ g ∈ G (7.2)
F (f − g0) = ‖f − g0‖ (7.3)
iii) Oricare ar fi g ∈ G exista un F g ∈ E∗ astfel ıncıt
F g ∈ E(BE∗) (7.4)
ReF g(g0 − g) ≥ 0 (7.5)
F g(f − g0) = ‖f − g0‖ (7.6)
Demonstratie. i)⇒ ii). Deoarece f ∈ E\G si g0 ∈ G avem B(f, ‖f−g0‖)∩G = ∅. In virtutea unei bine cunoscute teoreme de separare (vezi anexa )exista F0 ∈ E∗ si un numar real c astfel ıncıt
ReF0(f − g) ≥ c, ∀ g ∈ G
siReF0(f − h) ≤ c, ∀ h ∈ B(f, ‖f − g0‖).
Atunci, pentru F =1c‖f − g0‖ · F0 ∈ E∗ avem
Re F (f − g) ≥ ‖f − g0‖, ∀ g ∈ G (7.7)
siRe F (f − h) ≤ ‖f − g0‖ ∀ h ∈ B(f, ‖f − g0‖). (7.8)
Folosind (7.8) pentru g = g0 obtinem
‖f − g0‖ ≤ ReF (f − g0) ≤ |F − g0)| ≤ ‖F‖ · ‖f − g0‖ (7.9)
deci ‖F‖ ≥ 1. Daca am avea ‖F‖ > 1 atunci, ar exista un z ∈ E astfelıncıt ‖z‖ = 1 si F (z) > 1 ın contradictie cu (7.8) pentru h de forma h =

§7. Cea mai buna aproximare in spatii normate 145
f − ‖f − g0‖z ∈ B(f, ‖f − g0‖. Prin urmare ‖F‖ = 1, adica (7.1) si folosind(7.9) obtinem
‖f − g0‖ = Re F (f − g0) = |F (f − g0)|de unde rezulta ‖f − g0‖ = F (f − g0) adica (7.3). In sfırsit, utilizınd (7.7),
ReF (g0 − g) = ReF (g0 − f) + ReF (f − g) =
= −ReF (f − g0) + ReF (f − g) = −‖f − g0‖+ ReF (f − g) ≥ 0
adica (7.2).ii)⇒ iii). Fie g ∈ G. Presupunem prin absurd ca
ReF0(g0 − g) < 0 (7.10)
pentru orice F0 ce verifica F0 ∈ E(BE∗) si F0(f − g0) = ‖f − g0‖. Multimea
Mf,g0 = F ∈ E∗; ‖F‖ = 1 si F (f − g0) = ‖f − g0‖
este o submultime nevida, convexa si extremala a multimi BE∗ unde BE∗ =F ∈ E∗, ‖F‖ ≤ 1. Din teorema Krein - Milman ( Teorema 15.1 ) avem
Mf,g0 = coE(Mf,g0). (7.11)
Aplicatia F → ReF (g0 − g) este continua din E∗ cu topologia ∗-slaba(σ(E∗, E)-topologia ) si cum
ReF0(g0 − g) < 0 ∀ F0 ∈ E(Mf,g0) = E(BE∗) ∩Mf,g0
(din presupunerea (7.10)) folosind (7.1) obtinem
ReF (g0 − g′) ≤ 0, ∀ F ∈Mf,g0 (7.12)
MultimeaNg = F ∈Mf,g0 ; Re F (g0 − g) ≥ 0
este nevida (din (ii)) si este o submultime extremala a multimii Mf,g.Intr-adevar, presupunem ca pentru un f ∈ Ng si un λ ∈ (0, 1) avem
F = λF1 + (1− λ)F2, unde F1, F2 ∈Mf,g0 .
Atunci, pe de-o parte
Re [λF1(g0 − g) + (1− λ)F2(g0 − g)] ≥ 0

146 Capitolul 3. Cea mai buna aproximare
iar pe alta parte folosind (7.12) rezulta
ReF1(g0 − g) ≤ 0, Re F2(g0 − g) ≤ 0
deci ReF1(g0−g) = 0 = ReF2(g0−g), adica F1, F2 ∈ Ng, de unde rezulta caNg este o submultime extremala a multimii Mf,g, deci si a multimiii BE∗ .In virtutea teoremei Krein-Milman ( Teorema 15.1 ) aplicata multimii Ng
(care este σ(E∗, E)-compacta ın E∗), exista un F g ∈ E(Ng) = E(BE∗)⋂Ng,
ceea ce contrazice presupunerea ca avem (7.10) pentru orice F0 ∈ E(BE∗)care satisface F0(f − g0) = ‖f − g0‖. Am demonstrat astfel ca ii) ⇒iii).
iii)⇒i). Sa presupunem ca pentru orice g ∈ G exista un F g ∈ E∗ astfel ıncıtsa avem (7.4), (7.5), (7.6). Atunci pentru orice g ∈ G avem
‖f − g0‖ = F g(f − g0) = ReF g(f − g) ≤ ReF g(f − g) ≤
≤ |F g(f − g)| ≤ ‖F g‖ · ‖f − g‖ = ‖f − g‖,deci g0 ∈ PG(f), ceea ce termina demonstratia. 2
Teorema 7.3 Fie E un spatiu normat, G un subspatiu vectorial al lui E,f ∈ E\G si g0 ∈ G. Urmatoarele afirmatii sınt echivalente.
i) g0 ∈ PG(f).
ii) Exista F ∈ E∗ avınd proprietatile:
‖F‖E∗ = 1, F (f − g0) = ‖f − g0‖, F (g) = 0, ∀ g ∈ G (7.13)
iii) Oricare ar fi g ∈ G exista F g ∈ E∗ astfel ıncıt
F g ∈ E(BE∗), F g(f − g0) = ‖f − g0‖, Re F g(g0 − g) ≥ 0 (7.14)
Demonstratie. i)⇒ ii). Daca g0 ∈ PG(f), cum G este o multime convexa(fiind subspatiu ) ın E, utilizınd Teorema 7.2, obtinem ca exista F ∈ E∗ ceverifica: ‖F‖ = 1, F (f − g0) = ‖f − g0‖ si ın plus
ReF (g0 − g) ≥ 0, ∀ g ∈ G (7.15)
Fie h ∈ G, t ∈ (0, 1) si g = tg0 + (1− t)(g0 − h) = g0 − (1− t)h. Din (7.15)avem
0 ≤ ReF (g0 − g) = ReF ((1− t)h) = (1− t)ReF (h).

§7. Cea mai buna aproximare in spatii normate 147
In relatia de mai sus facınd pe t 0 obtinem ReF (h) ≥ 0 pentru oriceh ∈ G. Cum G este subspatiu vectorial ın E, rezulta ReF (h) = 0, de undeF (h) = 0 pentru orice h ∈ G. Am demonstrat astfel ca i) ⇒ ii). Afirmatiileii) ⇒ iii) si iii) ⇒ i) rezulta imediat din Teorema 7.2. 2
• Daca G este un subspatiu de dimensiune finita ıntr-un spatiu normat E,atunci rezultatele anterioare de caracterizare a punctelor de cea mai bunaaproximare pot fi precizate mai mult.
Teorema 7.4 Fie E un spatiu vectorial normat, G = spf1, . . . , fn unsubspatiu n-dimensional al lui E, f ∈ E\G si g0 ∈ G. Urmatoarele afirmatiisınt adevarate:
i) g0 ∈ PG(f).
ii) Exista h puncte extremale F1, . . . Fh ale lui SE∗, unde 1 ≤ h ≤ n + 1,daca scalarii sınt reali si 1 ≤ h ≤ 2n + 1, daca scalarii sınt complecsisi h numere λ1, . . . , λh > 0 cu
∑hj=1 λj = 1 astfel ıncıt
h∑
j=1
λjFj(g) = 0, ∀ g ∈ G (7.16)
Fj(f − g0) = ‖f − g0‖, j = 1, . . . , h (7.17)
Demonstratie. Sa presupunem ca avem i). In virtutea Teoremei 7.3, existao functionala F ∈ E∗ satisfacınd conditiile
‖F‖E∗ = 1, F (f − g0) = ‖f − g0‖, F (g) = 0, ∀ g ∈ G. (7.18)
Fie En+1 subspatiul vectorial (n + 1)-dimensional generat de f1, . . . , fn, f .Din conditiile de sus rezulta ‖F |En+1 ‖ = 1. Pentru F |En+1 exista hpunctele extremale F1, . . . Fh, ale SE∗n+1
, unde 1 ≤ h ≤ n+1, daca scalarii sıntreali si 1 ≤ h ≤ 2n+1, daca scalarii sınt complecsi si h numere λ1, . . . , λh > 0cu
∑hj=1 = 1 astfel ıncıt
F (y) =h∑
j=1
λjFj(y), ∀ y ∈ En+1. (7.19)
Cum pentru orice punct extremal ϕ ∈ SEn+1 exista un punct ϕ ∈ SE∗ ,putem presupune ca F1, . . . , Fh sınt puncte extremale ale lui SE∗ , adica

148 Capitolul 3. Cea mai buna aproximare
F1, . . . , Fh ⊂ E(SE∗). Tinınd seama de (7.18) si (7.19) avem
h∑
j=1
λiFj(g) = 0, ∀ g ∈ G
si
‖f − g0‖ = F (f − g0) =h∑
j=1
λjFj(f − g0). (7.20)
Vom arata acum ca Fj(f − g0) = ‖f − g0‖. Din (7.20) obtinem
‖f − g0‖ =h∑
j=1
λjReFj(f − g0) ≤h∑
j=1
λj |Fj(f − g0)| ≤
≤h∑
j=1
λj‖f − g0‖ = (h∑
j=1
λj)‖f − g0‖
de undeh∑
j=1
λjReFj(f − g0) =h∑
j=1
λj |ReFj(f − g0)| =
=h∑
j=1
λj |Fj(f − g0)| = ‖f − g0‖
deci Fj(f − g0) = ‖f − g0‖, ∀ j = 1, . . . , h. Am demonstrat astfel ca i)⇒ ii). Sa presupunem ca avem ii). Atunci functionala F ∈ E∗ definita prin
F =h∑
j=1
λjFj (7.21)
are urmatoarele proprietati: F (g) = 0, ∀ g ∈ G, ce rezulta din (7.16),F (f − g0) = ‖f − g0‖ ce rezulta din (7.17) si ‖F‖ = 1 deoarece ‖F‖ ≤ 1 din(7.21) si ‖Fj‖ = 1, iar ‖F‖ ≥ 1 rezulta din faptul ca F (f − g0) = ‖f − g0‖.Utilizınd Teorema 7.3 obtinem ca ii) ⇒ i). 2
• Daca S este o multime compacta atunci avem rezultatele urmatoare:
Teorema 7.5 Fie G un subspatiu ınchis din C(S), f ∈ C(S)\G, g0 ∈ G siE(g0) = s ∈ S; |g0(s) − f(s)| = ‖g0 − f‖C(S). Urmatoarele afirmatii sıntechivalente:

§7. Cea mai buna aproximare in spatii normate 149
i) g0 ∈ PG(f).
ii) Oricare ar fi g ∈ G exista s ∈ E(g0) astfel ıncıt
Re[f(s)− g0)(s)]g(s) ≤ 0.
iii) Nu exista g ∈ G astfel ca pentru orice s ∈ E(g0) sa avem
sgn(g0(s)− f(s))g(s) < 0.
Demonstratie. Cum forma generala a elementelor extremale ale bilei unitareınchise din dualul lui C(S) sınt de forma αx∗s unde |α| = 1 si x∗s(h) =h(s) ∀ h ∈ C(S), folosind Teorema 7.3 rezulta ca g0 ∈ PG(f) daca si numaidaca pentru orice g ∈ G exista un s = sg ∈ E(g0) si un scalar α = αg cu|α| = 1, astfel ıncıt
Reα[g0(s)− g(s)] ≤ 0, α[f(s)− g0(s)] = ‖f − g0‖C(S).
Dar s fiind ın E(g0) avem |g0(s)− f(s)| = ‖g0 − f‖C(S). Deoarece singurulscalar satisfacınd |α| = 1 si Imα[f(s)− g0(s)] = 0 este
α = sgn[f(s)− g0(s)] = f(s)− g0(s)/|f(s)− g0(s)|rezulta ca avem g0 ∈ PG(f) daca si numai daca pentru orice g ∈ G existaun s ∈ E(g0) satisfacınd
Re [f(s)− g0(s)] · [f0(s)− g(s)] ≥ 0.Cum orice element h din G este de forma h = g0 − g cu g ın G obtinem caRe[f(s)−g0(s)]g(s) ≥ 0. Am demonstrat astfel ca i) este echivalent cu ii).Echivalenta ii) si iii) rezulta imediat. 2
Teorema 7.6 Fie S compact si G ⊂ C(S) un subspatiu de dimensiune n,f ∈ C(S)\G, g0 ∈ G si e = g0 − f. Urmatoarele afirmatii sınt echivalente:
i) g0 ∈ PG(f).
ii) exista h puncte s1, . . . , sk ∈ S cu 1 ≤ h ≤ n + 1 daca scalarii sıntreali si 1 ≤ h ≤ 2n + 1 daca scalarii sınt complecsi, ıntregi εi = ±1 sinumerele reale pozitive ρi astfel ca
εie(si) = ‖e‖C(S), i = 1, . . . , h;h∑
j=1
ρiεjg(sj) = 0, ∀ g ∈ G.
Demonstratie. Tinınd seama de forma punctelor extremale ale bilei ınchiseın dualul spatiului C(S) ( Teorema 15.2) si de Teorema 7.4 echivalentaafirmatiilor i) si ii) rezulta imediat. 2

150 Capitolul 3. Cea mai buna aproximare
7.2 Existenta elementelor de cea mai bunaaproximare
In paragraful de fata ne vom ocupa de existenta elementelor de cea mai bunaaproximare ın spatii vectoriale normate arbitrare pe care le vom aplica apoidiverselor spatii concrete. Deoarece
PG(f) =
f pentru f ∈ G∅ pentru f ∈ G\G
oricare ar fi spatiul vectorial G al spatiului normat E, va ajunge sa demon-stram existenta elementelor de cea mai buna aproximare ale elementelorf ∈ E\G. Vom exclude cazul banal cınd G este un spatiu dens ın E, deoareceın acest caz problema existentei elementului de cea mai buna aproximare esterezolvata, si anume pentru f ∈ G avem ca PG(f) = ∅.Cum cele mai multe cazuri care intervin ın practica sınt cele pentru care Geste de dimensiune finita vom ıncepe analiza existentei elementului de ceamai buna aproximare cu acest caz.
Fiind dat un spatiu normat (E, ‖ · ‖), G un subspatiu vectorial din E, prob-lema celei mai bune aproximari a unui element f din E cu elemente din Gconsta ın a gasi un element g ∈ G astfel ca
dG(f) = infg∈G
‖f − g‖ = ‖f − g‖.
Teorema 7.7 Daca (E, ‖ ‖ este un spatiu normat, iar G este un subspatiufinit dimensional din E, atunci pentru orice element f din E exista cel putinun element g din G astfel ca
dG(f) = infg∈G
‖f − g‖ = ‖f − g‖
adica PG(f) 6= ∅.
Demonstratie. Aratam pentru ınceput ca este suficient sa cautam cea maibuna aproximare cu elementele dintr-o bila marginita. Fie ε > 0 si fie B bilaınchisa cu centrul ın f si de raza dG(f) + ε, adica
B = h ∈ E; ||f − h|| ≤ dG(f) + ε .
Multimea G ∩B este nevida si avem
dG(f) = infg∈G
‖f − g‖ = infg∈G∩B
‖f − g‖ (7.22)

§7. Cea mai buna aproximare in spatii normate 151
Intr-adevar, daca h ∈ G\B atunci ‖f − h‖ > dG(f) + ε si deci (7.22) esteadevarata. Functia w : E → R definita prin w(g) = ‖g − f‖ fiind continua,iar domeniul G ∩B fiind compact (parte ınchisa marginita a unui spatiu dedimensiune finita ), rezulta ca w ısi atinge minimul sau pe G∩B, deci existag ∈ G ∩B astfel ca dG(f) = ‖f − g‖. 2
Demonstratia precedenta nu utilizeaza ın mod esential faptul ca G este unsubspatiu vectorial de dimensiune finita, ci doar faptul ca G este ınchis si caintersectia sa cu o bila ınchisa ın E este compacta. Avem urmatorul rezultatmai general:
Teorema 7.8 Fie G o multime ınchisa a unui spatiu normat. Daca inter-sectia oricarei multimi ınchise marginite din E cu G este o multime com-pacta, atunci pentru orice f ∈ E exista cel putin o cea mai buna aproximareın G. Mai mult, daca G este un subspatiu vectorial de dimensiune finita iarQ este o submultime ınchisa ın G, atunci pentru orice f ∈ E exista cel putinun element de cea mai buna aproximare ın Q.
In cadrul spatiilor normate uniform convexe are loc urmatorul rezultat:
Teorema 7.9 Daca (E‖ · ‖) este un spatiu uniform convex, iar G ⊂ E esteo multime convexa, ınchisa, completa, atunci pentru orice f ∈ E multimeaPG(f) este nevida, adica exista g ∈ G astfel ca
dG(f) = infg∈G
‖f − g‖ = ‖f − g‖.
Demonstratie. Cum spatiul (E, ‖ · ‖) este uniform convex, aplicatiaw : E → R+ definita prin
w(g) = ‖f − g‖2, ∀ g ∈ E
este uniform convexa, deci exista α > 0 astfel ıncıt pentru orice g si g ∈ Esi pentru orice λ ∈ (0, 1) sa avem
λw(g) + (1− λ)w(g)− w(λg + (1− λ)g) ≥ λ(1− λ)α‖g − g‖2.
Fie (gn) ⊂ G un sir cu proprietatea ca
dG(f) ≤ ‖f − gn‖ < dG(f) +1n
(7.23)

152 Capitolul 3. Cea mai buna aproximare
Un asemenea sir exista tinınd seama de definitia inferiorului multimii denumere reale ‖f − g‖, g ∈ G marginita inferior de zero. Pentru oriceλ ∈ (0, 1) si pentru orice n,m ∈ N avem
λ(1−λ)α‖gn−gm‖2 ≤ λ‖f−gn‖2+(1−λ)‖f−gm‖2−‖f−λgn−(1−λ)gm‖2
≤ λ‖f − gn‖2 + (1− λ)‖f − gm‖2 − d2G(f) =
= λ(‖f − gn‖2 − d2G(f)) + (1− λ)(‖f − gm‖2 − d2
G(f))
de unde rezulta ca gn este un sir Cauchy ın G, si cum G este o multimecompleta rezulta ca sirul gn are o limita g ın G. Evident elementulg ∈ PG(f) deoarece dG(f) ≤ ‖f − g‖ ≤ dG(f) care se obtine prin trecerea lalimita ın inegalitatea (7.23). 2
• Cum orice spatiu Hilbert E este uniform convex, atunci orice elementf din E admite o cea mai buna aproximare cu elemente dintr-o multime Gconvexa, completa nevida, ın particular G o multime convexa ınchisa nevida.Subspatiile vectoriale G ⊂ E care au proprietatea ca multimea PG(f) estenevida pentru orice element f ∈ E\G (sau, ceea ce este echivalent, pentruorice element f ∈ E) se numesc subspatii proximinale ale lui E.
Vom da acum cıteva caracterizari ale subspatiilor proximinale.
Teorema 7.10 Fie E un spatiu normat si fie G un subspatiu vectorial allui E. Urmatoarele afirmatii sınt echivalente:
1) G este proximinal;
2) G este ınchis si orice subspatiu vectorial Fx ⊂ E (x ∈ E\G ) de forma
Fx = G⊕ [x] (7.24)
exista un element z ∈ Fx\0 astfel ca 0 ∈ PG(z)
Pentru demonstrarea acestei teoreme vom folosi urmatorul rezultat:
Lema 7.1 Fie E un spatiu normat si fie H un subspatiu maximal din E.Pentru ca H sa fie proximinal, este necesar si suficient sa existe un elementz ∈ E\0 astfel ıncıt
0 ∈ PH(z). (7.25)

§7. Cea mai buna aproximare in spatii normate 153
Demonstratie. Sa presupunem ca H este proximinal si sa luam x ∈ E\H,y0 ∈ PH(x) arbitrare. Atunci pentru z = x − y0 6= 0 avem 0 ∈ PH(z).Reciproc sa presupunem ca exista un z ∈ E\0 astfel ıncıt sa avem 0 ∈PH(z) si fie x ∈ E\H arbitrar. Sa luam f ∈ E∗ astfel ıncıt H = y ∈E; f(y) = 0 si sa punem y0 = x − f(x)
f(z)z (avem f(z) 6= 0, deoarece ın caz
contrar am avea z ∈ H, deci 0 ∈ PH(z) = z. deci z = 0, ın contradictiecu ipoteza ). Avem atunci f(y0) = 0, deci y0 ∈ H. De asemenea, deoarecef(x)−1f(z)(y − y0) ∈ H pentru orice y ∈ H (avem f(x) 6= 0 prin ipotezax ∈ E\H), din 0 ∈ PH(Z) rezulta ca avem
‖x− y0‖ = |f(x)f(z)
|‖z‖ ≤ |f(x)f(z)
| · ‖z − f(z)f(x)
(y − y0)‖ = ‖x− y‖, ∀ y ∈ H,
deci y0 ∈ PH(x). Deoarece x ∈ E\H a fost ales arbitrar, rezulta ca H esteproximinal, ceea ce termina demonstratia. 2
Demonstratia teoremei 7.10. Sa presupunem ca avem 1). Atunci, cumPG(x) 6= ∅ ∀ x ∈ E\G rezulta ca G este ınchis (deoarece daca x ∈ G\Gatunci PG(x) = ∅). Pe de alta parte, tot din 1), G este proximinal si ın oricesubspatiu Fx ⊂ E ( x ∈ E\G) de forma (7.24). Deoarece G este un subspatiumaximal ın Fx din partea de necesitate a lemei de mai sus rezulta 2). Asadar,1⇒ 2). Reciproc, sa presupunem ca avem 2). Deoarece G este un subspatiumaximal ın fiecare subspatiu Fx ⊂ E (x ∈ E\G) de forma (7.24), din parteade suficienta a lemei de mai sus rezulta ca G este proximinal ın fiecare Fx.Cum E =
⋃x∈E\G Fx, obtinem ca G este proximinal si ın E. Asadar 2) ⇒1).
2
Tinınd seama de diverse caracterizari ale spatiilor Banach reflexive avemurmatorul rezultat.
Teorema 7.11 Fie E un spatiu Banach. Urmatoarele afirmatii sınt echiva-lente:
1) Toate subspatiile vectoriale ınchise ale lui E sınt proximinale.
2) Toate subspatiile vectoriale ınchise separate ale lui E sınt proximinale.
3) Toate subspatiile vectoriale ınchise ale lui E, de o anumita codimen-siune finita fixata m, unde 1 ≤ m ≤ dimE − 1, sınt proximinale.
4) Orice f ∈ E∗ are un element maximal, adica exista x ∈ E, cu ‖x‖ = 1si f(x) = ‖f‖.

154 Capitolul 3. Cea mai buna aproximare
5) Spatiul E este reflexiv.
Pentru demonstrare se poate consulta [86].
7.3 Unicitatea elementelor de cea mai bunaaproximare
In acest paragraf vom studia unicitatea elementului de cea mai buna aprox-imare ıntr-un cadru functional cıt mai general.
Teorema 7.12 Fie E un spatiu normat si G ⊂ E o multime convexa nevida.Daca E este strict convex atunci pentru orice element f ∈ E multimea PG(f)contine cel mult un element.
Demonstratie. Deoarece E este strict convex functionala g → ‖f − g‖2
este strict convexa pe E. Daca ar exista g1, g2 ∈ PG(f), g1 6= g2 atunciam avea d = ‖f − g1‖2 = ‖f − g2‖2 si pentru orice t ∈ (0, 1) ar rezulta‖f − tg1− (1− t)g2‖2 = d, ceea ce ar contrazice strict convexitatea spatiuluiE. 2
Teorema 7.13 Fie E un spatiu normat, G un subspatiu vectorial al lui E,f ∈ E\G si g0 ∈ G. Urmatoarele afirmatii sınt echivalente:
1) PG(f) = g0;2) g0 ∈ PG(f) si nu exista g ∈ G\g0 si F ∈ E∗ astfel ıncıt :
a) ‖F‖ = 1; b) F (g) = F (g0); c) F (f − g) = ‖f − g‖.
Demonstratie. Sa presupunem ca avem 1) si ca exista g ∈ G\g0 siF ∈ E∗ care verifica a), b) si c). Avem atunci
‖f − g0‖ ≥ |F (f − g0)| = |F (f − g) + F (g − g0)| == |F (f − g)| = ‖f − g‖,
de unde , cum g ∈ PG(f) rezulta ca g0 ∈ PG(f), contrar cu faptul ca PG(f)contine numai pe g0. Asadar 1) ⇒2)).
Sa presupunem acum ca avem 2) si fie g ∈ G\g0, g ∈ PG(f). Folosindteorema de caracterizare a punctelor de cea mai buna aproximare (Teorema7.3) rezulta ca exista F ∈ E∗ cu urmaratoarele proprietati: ‖F‖ = 1, F (h) =0 ∀ h ∈ G ( ın particular, F (g) = 0 = F (g0)) si F (f − g) = ‖f − g‖ ceeacea contrazice ipotezele din 2), asadar 2)⇒ 1). 2

§7. Cea mai buna aproximare in spatii normate 155
Definitia 7.1
a) Se spune ca un subspatiu vectorial G al spatiului normat Eeste semice-bısevian, daca pentru orice f ∈ E multimea PG(f) contine cel multun element.
b) Se spune ca un subspatiul vectorial G este cebısevian, daca este simul-tan proximinal si semicebısevian, adica pentru orice f ∈ E multimeaPG(f) contine exact un element.
Teorema 7.14 Fie E un spatiu vectorial si fie G un subspatiu vectorial allui E. Urmatoarele afirmatii sınt echivalente:
1) G este semicebısevian;
2) Nu exista F ∈ E∗ si f1f2 ∈ E cu f1 − f2 ∈ G\0, astfel ıncıt
‖F‖ = 1, F (g) = 0 ∀ g ∈ G; F (f1) = ‖f1‖; F (f2) = ‖f2‖ (7.26)
3) Nu exista F ∈ E∗, f ∈ E, g0 ∈ G\0 cu proprietatile:
‖F‖ = 1, F (g) = 0 ∀ g ∈ G;F (f) = ‖f‖ = ‖f − g0‖. (7.27)
Demonstratie. Sa presupunem ca exista F ∈ E∗ si f1, f2 ∈ E cu f1− f2 ∈G\0, astfel ıncıt sa avem (7.26). Sa punem g0 = f1 − f2. Avem atunci
F (f1 − g0) = F (f2) = ‖f2‖ = ‖f1 − g0‖ (7.28)
F (f1) = ‖f1‖ (7.29)
deci si f1 ∈ E\G ( altfel, din ‖F‖ = 1, (7.28) si (7.29) am obtine 0 = F (f1) =‖f1‖, 0 = F (f1 − g) = ‖f2‖, ın contradictie cu f2 − f1 6= 0). Prin urmare,ın virtutea Teoremei 7.1 avem g0 ∈ P0(f1) si 0 ∈ P(f1). Deoarece g0 6= 0,rezulta ca G nu este semicebısevian. Asadar,1) ⇒ 2). Sa presupunem acum ca exista F ∈ E∗, f ∈ E si g0 ∈ G\0 cuproprietatile (7.27). Sa presupunem f1 = f, f2 = f−g0. Atunci avem (7.26)si f1 − f2 = g0 ∈ G\0. Asadar, 2) ⇒ 3).
Sa presupunem acum ca G nu este semicebısevian. Atunci pentru un y ∈E\G convenabil exista g1, g2 ∈ PG(y), g1 6= g2. Prin urmare, punınd f =y − g1, g0 = g2 − g1, avem f ∈ E\G, g0 ∈ G\0 si g0 ∈ PG(f). Dincaracterizarea elementelor de cea mai buna aproximare, exista atunci unF ∈ E∗ astfel ıncıt sa avem (2). Asadar 3) ⇒ 1). 2
Ca un colorar al teoremei de mai sus avem urmatorul rezultat:

156 Capitolul 3. Cea mai buna aproximare
Teorema 7.15 Fie E un spatiu normat. Urmatoarele afirmatii sınt echiva-lente:
1) Toate subspatiile vectoriale ale lui E sınt semicebıseviene.
2) Toate subspatiile vectoariale ale lui E de o anumita dimensiune finitafixata n, unde 1 ≤ n ≤ dimE − 1 sınt cebıseviene.
3) Toate subspatiile vectoriale ınchise ale lui E, de o anumita codimensi-une finita fixata m, 1 ≤ m ≤ dimE − 1 sınt semicebıseviene.
4) Spatiul E este strict convex.
Pentru demonstratie se poate consulta [86].
Teorema 7.16 Fie E un spatiu Banach. Urmatoarele afirmatii sınt echiva-lente.
1) Toate subspatiile vectoriale ınchise ale lui E sınt cebıseviene.
2) Toate subspatiile vectoriale ınchise ale lui E, de o anumita codimensi-une finita fixata m, 1 ≤ m ≤ dimE − 1, sınt cebıseviene.
3) E este reflexiv si strict convex.
Demonstratie. Implicatia 1)⇒ 2) este evidenta, iar implicatiile2)⇒ 3) si 3) ⇒ 1) rezulta combinınd Teorema 7.11 si Teorema 7.15. 2
Remarca 7.3 Daca E este un spatiu uniform convex atunci:
1) toate subspatiile vectoriale ınchise ale lui E sınt cebıseviene.
2) toate subspatiile vectoriale ınchise ale lui E de o anumita codimensiunefinita fixata m, 1 ≤ m ≤ dimE − 1, sınt cebıseviene.
Remarca 7.4 Daca E este un spatiu hilbertian atunci toate subspatiile vec-toriale ınchise ale lui E sınt cebıseviene.
Definitia 7.2 Fie S o multime compacta avınd cel putin n elemente iarϕ1, · · · , ϕn functii continue pe S. Subspatiul vectorial V , generat de functiileϕ1, · · ·ϕn verifica conditia lui Haar daca toate elementele din V \0 admitcel mult n− 1 zerouri ın S.

§7. Cea mai buna aproximare in spatii normate 157
Propozitia 7.2 Daca ϕ1, . . . , ϕn ∈ C(S) atunci urmatoarele afirmatii sıntechivalennte:
1) Oricare n fie x1, · · ·xn puncte distincte din S matricea
M( x1, . . . , xn
ϕ1, . . . , ϕn
)=
ϕ1(x1) . . . ϕn(x1)...
...ϕ1(xn) . . . ϕn(xn)
are determinantul nenul.
2) Subspatiul V generarat de ϕ1, . . . , ϕn verifica conditia lui Haar.
Demonstratie. 1)⇒ 2). Fie ϕ ∈ V \0 care are cel putin n zerouri,sifie acesta x1, . . . , xn. Cum ϕ ∈ V exista α = (α1, . . . αn) 6= 0 astfel caϕ = α1ϕ1 + . . . + αnϕn. Deci
ϕ1(x1) . . . ϕn(x1)ϕ1(x2) . . . ϕn(x2)...ϕ1(xn) . . . ϕn(xn)
α1
α2...αn
=
ϕ(x1)ϕ(x2)...ϕ(xn)
=
00...0
(7.30)
Cum α = (α1, . . . αn) 6= 0 si verifica sistemul (7.30) rezulta ca matricea
M( x1, . . . , xn
ϕ1, . . . , ϕn
)are determinantul nul, o contradictie.
2)⇒ 1) Presupunem ca exista n puncte distincte x1, . . . , xn ın S astfel ca ma-
tricea M( x1, . . . , xn
ϕ1, . . . , ϕn
)sa fie singulara. Fie ϕ ∈ V \0 si α = (α1, . . . , αn)
nenul astfel ca ϕ = α1ϕ1 + . . . + αnϕn.
Sistemul
ϕ1(x1) . . . ϕn(x1)...ϕ1(x1) . . . ϕn(x1)
α1...αn
=
ϕ(x1)...ϕ(xn)
are o solutie nenula, si cum matricea M este nesingulara trebuie ca ϕ(x1) =ϕ(x2) . . . = ϕ(xn) = 0, adica ϕ se anuleaza ın n puncte, ceea ce este ıncontradictie cu presupunerea ca V verifica conditia lui Haar.

158 Capitolul 3. Cea mai buna aproximare
Propozitia 7.3 Presupunem ca subspatiul V generat de functiile continuepe S, ϕ1, . . . , ϕn verifica conditia lui Haar. Daca o functionala liniara con-tinua pe C(S) de forma
l(h) =k∑
i=1
λih(xi),
unde x1, . . . , xn sınt puncte distincte din S iar λ1, λ2, . . . λn sınt numerereale nenule, este astfel ca l(h) = 0, pentru orice h ∈ V , atunci k = n + 1 siλ1, . . . , λn sınt determinati ın mod unic modulo o constanta multiplicativa.
Demonstratie. Presupunem k < n + 1. Daca k ≤ n, putem consideraxk+1, . . . xn distincte de x1, . . . , xk si coeficienti λk+1 = 0, . . . , λn = 0. Atuncisistemul
n∑
i=1
λiϕj(xi) = 0 j = 1, . . . , n
admite o solutie nenula, deci matricea M( x1, . . . , xn
ϕ1, . . . , ϕn
)Tare determinantul
nul si folosind Propozitia 7.2, avem o contractie cu ipoteza ca V verificaconditia lui Haar, deci k = n + 1.
Pentru a gasi λ1, . . . , λk este suficient sa dam λn+1 si sa rezolvam sistemulliniar
n∑
i=1
λiϕj(xi) = −λn+1ϕj(xn+1), j = 1, . . . , n
a carui determinant este nenul ( conditia lui Haar ). Avem deci o solutie caredepinde liniar de λn+1. Daca avem o alta functionala l′(h) =
∑ni=1 λ′ih(xi)
cu coeficienti λ′i neproportionali cu λi, noua functionala
n∑
i=1
(λi − λ′iλi+1
λ′n+1
h(xi)
nu este identic nula si va fi bazata numai pe n puncte x1, . . . , xn ,de undecontradictia. 2
Propozitia 7.4 Daca conditia lui Haar este verificata, pentru V de dimen-siune n, f ∈ C(S)\V , g ∈ PV (f) atunci e = g − f admite cel putin n + 1puncte critice (|e(s)| = ‖e‖C(S)).

§7. Cea mai buna aproximare in spatii normate 159
Demonstratie. Daca nu avem decıt k ≤ n puncte critice, din Propozitia7.2, putem construi un element g ∈ V luınd valoarea −1 ın punctele ın caree(s) = |e(s)| si valoarea 1 ın punctele ın care e(s) = −|e(s)|. Avem atunci
sgn(g(s)− f(s))g(s) < 0, ∀s ∈ E(g) = s ∈ S; |e(s)| = ‖g − f‖C(S)
ceea ce contrazice faptul ca g ∈ PV (f). 2
Teorema 7.17 Fie V ⊂ C(S) un subspatiu de dimensiune n ce verificaconditia lui Haar si f ∈ C(S)\V , Elementul g0 ∈ PV (f) daca si numai dacaexista n+1 puncte x1, . . . , xn+1 ∈ S, ıntregi εi = ±1 si numerele reale strictpozitive gi astfel ca
1) εie(xi) = ‖e‖C(S), i = 1, . . . , n + 1
2)∑n+1
i=1 ρiεih(xi) = 0, ∀ h ∈ V
unde e = g0 − f.
Demonstratie. Rezulta imediat din propozitia anterioara. 2
Teorema 7.18 Fie G un subspatiu de dimensiune n din C(S). Urmatoareleafirmatii sınt echivalente:
1) G este cebısevian, adica pentru orice f ∈ C(S) multimea PG(f) contineexact un element;
2) G verifica conditia lui Haar, adica orice g ∈ G\0 are cel mult n− 1zerouri.
Demonstratie. Fie ϕ1, . . . , ϕn ⊂ C(S) cu G = spϕ1, . . . , ϕn. 1) ⇒2) Presupunem ca G este cebısevian dar ca G nu verifica conditia lui Haar.Exista atunci x1, . . . , xn puncte distincte ın S si g0 ∈ G, g0 6= 0 astfel ca
g0(xi) = 0 ∀ i = 1, . . . , n.
Fara a restrınge generalitatea putem presupune ca ‖g0‖C(S) < 1. Existaα = (α1, . . . , αn) ∈ Rn\0 cu g0 = α1ϕ1 + · · ·+αnϕn, deci sistemul omogen
n∑
j=1
αjϕj(xi) = 0, i = 1, . . . , n

160 Capitolul 3. Cea mai buna aproximare
admite o solutie nenula, si prin urmare det(ϕj(xi)) = 0. Putem gasi coeficientiλ1, . . . , λn nu toti nuli astfel ca pentru orice h ∈ G
n∑
j=1
λjh(xj) = 0.
Pentru aceasta este suficient ca λ1, . . . , λn sa fie solutia sistemului omogenn∑
j=1
λjϕ(xj) = 0, i = 1, . . . n
a carui determinant det(ϕi(xj)) este nul. Avem deci o solutie (λ1, . . . λn)nenula. Alegem un element f ∈ C(S) de norma egala cu 1 astfel ca
f(xi) = −1 daca λi > 0 si f = 1daca λi < 1
Considerınd functiile f si gε definite prin
f(x) = f(x)(1− |g0(x)|), gε(x) = εg0(x),
aratam ca pentru orice ε ∈ [0, 1], gε este cea mai buna aproximare ın G afunctiei f , adica gε ∈ PG(f) ∀ ε ∈ [0, 1].
|gε(x)− f(x)| = |εg0(x)− f(x)(1− |g0(x)|) ≤≤ ε|g0(x)|+ 1− |g0(x)| = 1− |g0(x)|(1− ε) ≤ 1.
Avem deci ‖gε−f‖C(S) ≤ 1. Dar gε(xi)−f(xi) = sgn(λi), deci ‖gε−f‖C(S) =1. Luınd εi = sgn(λi) si ρi = |λi| avem
εi(gε(xi)− f(xi)) = ‖gε − f‖, ∀ i ∈ 1, . . . , nn∑
i=1
ρiεih(xi) = 0, ∀ h ∈ G.
Utilizınd Teorema 7.6 rezulta ca gε ∈ PG(f) pentru orice ε ∈ [0, 1], deciPG(f) contine mai mult de un element.
2)⇒ 1) Fie f ∈ C(S), g1, g2 ∈ PG(f) si e1 = g1 − f, e2 = g2 − f . Cum
PG(f) este o multime convexa rezulta ca g0 =g1 + g2
2∈ PG(f). Fie e0 =
g0− f =e1 + e2
2. Din Propozitia 7.4 rezulta ca exista cel putin n+1 puncte
critice x1, . . . , xn+1, adica εie0(xi) = ‖e0‖C(S) cu εi = ±1. Pentru xi avem
εie1(xi) ≤ ‖e1‖C(S) = dG(f), εie2(xi) ≤ ‖e2‖C(S) = dG(f).

§8. Cea mai buna aproximare a functiilor continue 161
Dar avemεie1(xi) + εie2(xi)
2= εie0(xi) = dG(f)
ceea ce atrage : εie1(xi) = dG(f) = εie2(xi), de unde g1(xi) = g2(xi), i =1, . . . , n+1 ceea ce implica g1 = g2, deoarece G verifica conditia lui Haar. 2
8 Cea mai buna aproximare ın C([a, b])
Problema celei mai bune aproximari a unei functii f ∈ C([a, b]) prin poli-noamele algebrice, trigonometrice sau functii spline se poate ıncadra ınurmatoarea problema mai generala.
Se considera S o multime compacta cu cel putin n puncte si ϕ1, . . . , ϕn
functii continue pe S, iar G subspatiul din C(S) generat de ϕ1, . . . , ϕn.Pentru f ∈ C(S) sa se gaseasca g0 ∈ G astfel ca
‖f − g0‖C(S) ≤ ‖f − g‖C(S) ∀ g ∈ G.
Cum C(S) cu norma uniforma ‖ · ‖C(S) definita prin
‖h‖C(S) = maxx∈S
|h(x)|
este un spatiu Banach, iar G ⊂ C(S) este un spatiu finit dimensional rezultaca G este proximinal, adica pentru orice f ∈ C(S) exista g0 ∈ PG(f)(Teorema 7.7). Pentru ca g0 ∈ PG(f) sa fie unic este necesar si suficientca G sa verifice conditia lui Haar, adica orice element din G sa aiba cel multn− 1 zerouri ( din Teorema 7.18 ).
Sisteme Cebısev
Daca I este un interval din R, conditia lui Haar pentru subspatiul generatde un sistem finit de elemente din C(I) este strıns legata de notiunea desistem Cebısev.
Definitia 8.1 Fie I un interval (ınchis, deschis, semi-deschis ) din R siU = ϕ1, . . . , ϕn un sistem de n functii continue pe I. Multimea U formeazaun sistem Cebısev daca
D
(t1, . . . , tnϕ1, . . . ϕn
)> 0 ∀ t1 < · · · < tn din I

162 Capitolul 3. Cea mai buna aproximare
Teorema urmatoare furnizeaza legatura dintre un sistem Cebısev U si conditialui Haar pentru subspatiul generat de U .
Teorema 8.1 Fie I un interval din R, U = ϕ1, . . . , ϕn un sistem de nfunctii continue pe I si G subspatiul din C(I) generat de U .
1) Daca U este un sistem Cebısev atunci G verifica conditia lui Haar.
2) Daca G verifica conditia lui Haar atunci U sau U definit prin U =ϕ1, . . . , ϕn−1,−ϕn este un sistem Cebısev.
Demonstratie. Fie x1, . . . , xn puncte distincte din I. Putem sa le pre-supunem ordonate crescator, adica x1 < · · · < xn (ın caz contrar, le re-
botezam ). Daca U este un sistem Cebısev atunci D
(x1, . . . , xn
ϕ1, . . . ϕn
)> 0,
deci matricea M
(x1, . . . , xn
ϕ1, . . . ϕn
)este nesingulara, prin urmare, folosind
Propozitia 7.2, rezulta ca G verifica conditia lui Haar. Am demonstrat astfel
ca 1)=⇒ 2). Daca G verifica conditia lui Haar atunci M
(x1, . . . , xn
ϕ1, . . . ϕn
)
este nesingulara deci determinanul acestei matrici D
(x1, . . . , xn
ϕ1, . . . ϕn
)este
nenul. Deoarece D este o functie continua ın x, el trebuie sa aiba un semnconstant pentru orice x1 < . . . < xn ın I. Deducem ca U sau U este unsistem Cebısev. Am demonstrat astfel ca 2)=⇒ 1). 2
Exemple de sisteme Cebısev.
• Sistemul U = 1, x, . . . , xn este un sistem Cebısev ın orice interval Idin R.
• Sistemul U = 1, cosx, sinx, . . . , cosnx, sinnx este un sistem Cebısevpe intervalul I = [0, 2π), dar nu este un sistem Cebısev pe nici uninterval mai larg ( vezi Karlin & Studdent [50]).
• Sistemul U = 1, cosx, . . . , cosnx este un sistem Cebısev ın [0, π).
• Sistemul U = sinx, . . . , sinnx este un sistem Cebısev pe (0, π).

§8. Cea mai buna aproximare a functiilor continue 163
• Daca ∆ = xi cu a = x1 < · · · < xn = b este o diviziune a intervalului[a, b] iar U = H1, . . . ,Hn unde Hi sınt functiile de baza pentruS1(∆n) atunci U nu este un sistem Cebısev (rezulta folosind Teorema7.1).
Cea mai buna aproximare prin polinoame
Vom demonstra ın cele ce urmeaza existenta si unicitatea polinomului de ceamai buna aproximare a unei functii continue.
Teorema 8.2 Daca f ∈ C([a, b]) atunci exista si este unic un polinom p ∈Pn astfel ca
‖f − p‖C([a,b]) ≤ ‖f − p‖C([a,b]), ∀ p ∈ Pn
Demonstratie. Cum spatiul Pn are dimensiunea n + 1 si orice polinomp ∈ Pn\0 are cel mult n radacini, folosind rezultatele de existenta si unici-tate demonstrata anterior, rezulta ca problema celei mai bune aproximari ınC([a, b]) prin polinoame din Pn are solutie unica. 2
Remarca 8.1 Teorema de mai sus putea fi formata si astfel: Pn este unsubspatiu cebısevian ın C([a, b]).
Constructia polinomului de cea mai buna aproximare
Algoritmul Remes permite determinarea celei mai bune aproximari ın sensullui Cebısev pentru f ∈ C([a, b]). Acest algoritm consta ın:
- se porneste cu (n + 2) puncte arbitrare x00 < x0
1 < . . . < x0n+1 ın [a, b];
- pentru k ∈ N, k ≥ 0, se construieste un sir de (n + 2) puncte astfel:presupunem cunoscute xk
0 < xk1 < . . . < xk
n+1 carora le asociem pk ∈ Pn caresatisface relatiile:
f(xk
i
)− pk
(xk
i
)= (−1)i
[f
(xk
0
)− pk
(xk
0
)], i = 1, n + 1 ,
pentru care avem:
• daca ‖f − pk‖ =∣∣∣f
(xk
i
)− pk
(xk
i
)∣∣∣, atunci pk este polinomul de cea maibuna aproximare si algoritmul se opreste;

164 Capitolul 3. Cea mai buna aproximare
• altfel, daca exista y ∈ [a, b] astfel ıncıt
‖f − pk‖ = |f(y)− pk(y)| >∣∣∣f
(xk
i
)− pk
(xk
i
)∣∣∣ ,
atunci se construieste sirul xk+10 < xk+1
1 < . . . < xk+1n+1 astfel ca f − pk sa
schimbe semnul ın punctele sirului. Avem cazurile:
i) daca y ∈ [a, xk0) atunci daca produsul
(f
(xk
0
)− pk
(xk
0
))(f(y)− pk(y))
este nenegativ se alege xk+10 = y si xk+1
j = xkj , j = 1, n + 1, altfel se alege
xk+10 = y si xk+1
j = xkj−1 , j = 1, n + 1;
ii) daca y ∈(xk
i , xki+1
)cu i ∈ 0, n, atunci daca produsul
(f
(xk
i
)− pk
(xk
i
))(f(y)− pk(y))
este nenegativ se alege xk+1i = y si xk+1
j = xkj , j = 0, n + 1, j 6= i, altfel se
alege xk+1i+1 = y si xk+1
j = xkj−1 , j = 0, n + 1, j 6= i + 1;
iii) daca y ∈ (xkn+1, b] atunci daca produsul
(f
(xk
n+1
)− pk
(xk
n+1
))(f(y)− pk(y))
este nenegativ se alege xk+1n+1 = y si xk+1
j = xkj , j = 0, n, altfel se alege
xk+1n+1 = y si xk+1
j = xkj+1 , j = 0, n.
Observatie. Algoritmul Remes nu se opreste ıntotdeauna ıntr-un numarfinit de pasi. Se poate demonstra ınsa convergenta sirului (pk)k∈N obtinutprin acest algoritm la polinomul de cea mai buna aproximare ın sensul luiCebısev.
Lema 8.1 Fie (pk)k∈N sirul de polinoame obtinut prin algoritmul Remes.Notam
εk = maxi=0,n+1
∣∣∣f(xk
i
)− pk
(xk
i
)∣∣∣ , k ∈ N .
Atunci
εk < εk+1 ≤ infq∈Pn
‖f − q‖∞ , ∀ k ∈ N . (8.1)

§8. Cea mai buna aproximare a functiilor continue 165
Demonstratie. Tinınd seama de modul ın care se determina pk rezultaca εk ≤ inf
q∈Pn
‖f − q‖∞ , ∀ k ∈ N. Demonstram ca εk < εk+1. Dar εk =∣∣∣f
(xk
i
)− pk
(xk
i
)∣∣∣. Dupa modul ın care se construieste sirul(xk+1
j
)j=0,n+1
,
fie i0 ∈0, n + 1
indicele pentru care xk+1
i0= y. Dar εk =
∣∣∣f(xk
i0
)− pk
(xk
i0
)∣∣∣si ‖f−pk‖∞ =
∣∣∣f(xk+1
i0
)− pk
(xk+1
i0
)∣∣∣. Presupunem ca f(xk+1
i0
)> pk
(xk+1
i0
).
Din proprietatea de alternanta a semnelor avem:
f(xk+1
i
)− pk
(xk+1
i
)= (−1)i−i0εk , i = 0, n + 1 . (8.2)
Daca pk+1 este polinomul determinat la pasul k + 1 ın algoritmul Remes,avem:
f(xk+1
i0
)− pk+1
(xk+1
i0
)= ±εk+1 = εk+1 (8.3)
si
f(xk+1
i
)− pk+1
(xk+1
i
)= (−1)i−i0 εk+1 , i = 0, n + 1 .
Obtinem
pk+1
(xk+1
i0
)− pk
(xk+1
i0
)=
=(f
(xk+1
i0
)− pk
(xk+1
i0
))−
(f
(xk+1
i0
)− pk+1
(xk+1
i0
))=
= ‖f − pk‖∞ − εk+1
(8.4)
si pentru i 6= i0:
pk+1
(xk+1
i
)− pk
(xk+1
i
)= (−1)i−i0 (εk − εk+1) . (8.5)
Rezulta
pk+1 − pk = (εk+1 − εk) qk , (8.6)
unde qk ∈ Pn astfel ıncıt
qk(xk+1i ) = (−1)i−i0+1 , i 6= i0 . (8.7)
Avem qk(xk+1i0−1) = qk(xk+1
i0+1) = 1 > 0.Daca qk(xk+1
i0) < 0 atunci qk schimba semnul de n + 1 ori ın [a, b] si acest

166 Capitolul 3. Cea mai buna aproximare
lucru este imposibil deoarece qk ∈ Pn. Daca qk(xk+1i0
) = 0 atunci qk schimbasemnul de n − 1 ori ın [a, b], dar are zero dublu ın xk+1
i0, ceea ce contrazice
qk ∈ Pn. Deci, qk(xk+1i0
) > 0 si pk+1 − pk = (εk+1 − εk) qk ın [a, b]. Tinındseama de (8.4) avem:
(εk+1 − εk) qk
(xk+1
i0
)= pk+1
(xk+1
i0
)− pk
(xk+1
i0
)=
= ‖f − pk‖∞ − εk+1 ≥ ‖f − pk‖∞ − εk+1 ≥
≥ infq∈Pn
‖f − q‖∞ − εk+1 ≥ 0 .
Cum qk
(xk+1
i0
)> 0 rezulta ca εk+1 − εk ≥ 0.
Daca εk+1 = −εk+1 atunci s-ar obtine εk+1 − εk ≥ 0 ceea ce este imposibil.Deci, εk+1 = εk+1 si εk+1 − εk > 0. 2 2
Observatie. Daca εk+1 = εk atunci algoritmul se opreste la etapa k si pk
este polinomul de cea mai buna aproximare.
Lema 8.2 Fie(xk
i
)i=0,n+1
sirul de puncte obtinut la pasul k ın algoritmul
Remes. Atunci
∃η > 0 a.ı.∣∣∣xk
i+1 − xki
∣∣∣ ≥ η , ∀ i = 0, n , ∀ k ∈ N . (8.8)
Demonstratie. Presupunem prin absurd ca nu este adevarat, adica:
∃ (kl)l≥0 a.ı. liml→∞
xkli = xi ∈ [a, b] , i = 0, n + 1 ,
cu x0, x1, . . . , xn+1 nu toate distincte.Fie p ∈ Pn asa ıncıt f(xi) = p(xi) , i = 0, n + 1.Pentru l ≥ 1 avem:
0 ≤ ε0 < ε1 ≤ εkl= max
i=0,n+1
∣∣∣f(xkl
i
)− pkl
(xkl
i
)∣∣∣ ≤
≤ maxi=0,n+1
∣∣∣f(xkl
i
)− p
(xkl
i
)∣∣∣ ,
deci, la limita se obtine:
liml→∞
εkl= max
i=0,n+1|f (xi)− p (xi)| = 0 ,

§8. Cea mai buna aproximare a functiilor continue 167
adica, sirul (εk)k∈N ar contine un subsir convergent la zero, ceea ce esteimposibil. Deci, (8.8) este adevarat. 2
Notam cu p ∈ Pn polinomul de cea mai buna aproximare ın sensul luiCebısev pentru o functie f ∈ C([a, b]), a carui existenta si unicitate a fostdeja demonstrata ın teorema 8.2.
Teorema 8.3 Fie f ∈ C([a, b]) si p ∈ Pn polinomul de cea mai buna aprox-imare ın sensul lui Cebısev pentru f . Atunci sirul (pk)k∈N obtinut ın algo-ritmul Remes converge la p ın C([a, b]).
Demonstratie. Conform lemei 8.1 sirul (εk)k∈N este convergent. Deci, ex-ista ε = lim
k→∞εk. Pentru polinomul qk determinat prin relatiile (8.7), conform
formulei Lagrange avem:
qk(x) =n+1∑
i=0
i6=i0
(−1)i−i0+1n+1∏
j=0
j 6=i,j 6=i0
x− xk+1j
xki − xk+1
j
.
Conform cu lema 8.2 se obtine:
|qk(x)| ≤n+1∑
i=0
i6=i0
n+1∏
j=0
j 6=i,j 6=i0
∣∣∣x− xk+1j
∣∣∣∣∣∣xk
i − xk+1j
∣∣∣≤
≤n+1∑
i=0
i6=i0
1ηn
n+1∏
j=0
j 6=i,j 6=i0
∣∣∣x− xk+1j
∣∣∣ ≤ (n + 1)(b− a)n
ηn= const.
Cum |‖f − pk‖∞ − εk+1| ≤ |qk| (εk+1 − εk) rezulta ca
limk→∞
‖f − pk‖∞ = ε ,
deci, (pk)k∈N este marginit ın Pn. Cum Pn este spatiu de dimensiune finitarezulta ca exista un subsir (pkl
)l∈N convergent:
limk→∞
pkl= p ∈ Pn ,
si limk→∞
xkli = xi , i = 0, n + 1. Conform lemei 8.2 rezulta x0 < x1 < . . . <
xn+1.

168 Capitolul 3. Cea mai buna aproximare
La limita ın relatiile:
εkl=
∣∣∣f(xkl
i
)− pkl
(xkl
i
)∣∣∣
f(xkl
i+1
)− pkl
(xkl
i+1
)= −
(f
(xkl
i
)− pkl
(xkl
i
))
se obtine: ε = |f(xi)− p(xi)| si (f − p)(xi+1) = −(f − p)(xi) . Prin urmare,ε = ‖f − p‖∞ si p este polinomul cautat. 2
In norma din L2(a.b) determinarea polinomului de cea mai buna aproximaredin Pn este o problema ce se transeaza mai rapid. Pentru f ∈ C([a, b])polinomul p ∈ Pn cu proprietatea
‖f = p‖L2(a,b) ≤ ‖f − p‖L2(a,b) ∀p ∈ Pn
are forma p = α0+α1x+· · ·αnxn cu α = (α0, α1, . . . , αn)T solutia sistemuluiMα = b unde
Mij =∫ b
axi+jdx =
1i + j + 1
(bi+j+1 − ai+j+1
)
si
bi =∫ b
axif(x)dx, i = 0, . . . , n.
Folosind polinoamele ortogonale Legendre, putem sa exprimam polinomulp ∈ Pn de cea mai buna aproximare prin p =
∑ni=0 βipi unde
βi =∫ b
api(x)f(x)dx/
∫ b
ap2
i (x)dx.
8.1 Cea mai buna aproximare prin functii spline
Problema celei mai bune aproximari a unei functii din C([a, b]) prin functiispline ın norma uniforma si apoi ın norma patratica va fi analizata ın celece urmeaza.
Cea mai buna aproximare cu functii spline de gradul ıntıi
Daca ∆n = xicu a = x1 < x2 < · · · < xn−1 < xn = b este o diviziune aintervalului [a, b], iar f este o functie continua pe [a, b], problema celei maibune aproximari cu elemente din S1(∆n) revine la a determina o functieg ∈ S1(∆n) astfel ca:
‖f − g‖C([a,b]) ≤ ‖f − s‖C([a,b]), ∀ s ∈ S1(∆n).

§8. Cea mai buna aproximare a functiilor continue 169
Cea mai buna aproximare ın norma uniforma
Spatiul S1(∆n) fiind un spatiu finit dimensional din C([a, b]) existentaelementului de cea mai buna aproxinare este demonstrata ın Teorema 7.7.Cum S1(∆n) nu verifica conditia lui Haar rezulta ca elementul de cea maibuna aproximare ın norma uniforma nu este unic.
In cele ce urmeaza vom demonstra ca functia spline de interpolare asociatalui f este un element de ”aproape ”cea mai buna aproximare pentru f .Consideram distanta dintre f si S1(∆n) definita prin
dS1(∆n) = dist(f, S1(∆n)) = infs∈S1(∆n)
‖f − s‖C([a,b]).
Teorema 8.4 Pentru orice f din C([a, b)] avem
dist(f, S1(∆n)) ≤ ‖f − I1(f)‖C([a,b]) ≤ 2 dist(f, S1(∆n))
unde I1 este operatorul de interpolare pentru f pe S1(∆n).
Demonstratie. Observam ca daca h ∈ S1(∆n) atunci : I1(h) = h si I1 esteun operator liniar iar ‖I1(h)‖C([a,b]) ≤ ‖h‖C([a,b]) pentru orice h ∈ C([a, b]).Daca s ∈ S1(∆n) atunci:
‖f − I1(f)‖ = ‖f − s− I1(f − s)‖ ≤ ‖f − s‖+ ‖I1(f − s)‖ ≤ 2‖f − s‖de unde rezulta ca
dist(f, S1(∆n) ≤ ‖f − I1(f)‖ ≤ 2 · dist(f, S1(∆n)).
Din cele de mai sus rezulta ca
12‖f − I1(f)‖ ≤ dist(f, S1(∆n) ≤ ‖f − I1(f)‖.
Cea mai buna aproximare ın L2(a, b)
Determinarea elementului de cea mai buna aproximare din S1(∆n) ın normadin L2(a, b) este o problema ce poate usor fi solutionata. Daca notam cuL1(f) elementul din S1(∆n) de cea mai buna aproximare pentru f ın ‖ · ‖L2
atunci acest element este caracterizat prin∫ b
a|f(x)− L1(f)(x)|2dx = min
s∈S1(∆n)
∫ b
a|f(x)− s(x)|2dx (8.9)

170 Capitolul 3. Cea mai buna aproximare
Tinınd seama ca orice element din S1(∆n) se exprima ın mod unic ca ocombinatie liniara de (Hi)i=1,...,n problema (8.9) revine la determinarea min-imului pentru functionala F : Rn → R definita prin
F(α) = ‖f −n∑
i=1
αiHi‖2L2(a,b) =
∫ b
a|f(x)−
n∑
i=1
αiHi(x)|2dx,
adica, a determinarii punctul α ∈ Rn pentru care
F(α) ≤ F(α), ∀ α ∈ Rn.
Cum F este o functie derivabila, pentru ca α sa fie punct de minim pe Rn
trebuie ca∂F∂αi
(α) = 0, i = 1, . . . , n
deci punctul de minim α ∈ Rn verifica sistemul de ecuatii
n∑
j=1
[∫ b
aHi(x)Hj(x)dx
]αj =
∫ b
aHi(x)g(x)dx, ∀i = 1, . . . , n.
Calculınd integralele ce intervin ın sistemul de mai sus obtinem:
x2 − x1
3α1 +
x2 − x1
6α2 =
∫ b
aH1(x)g(x)dx
xi − xi−1
6ˆαi−1 +
xi+1 − xi−1
3αi +
xi+1 − xi
6ˆαi+1 =
∫ b
aHi(x)g(x)dx,
i = 2, n− 1
xn − xn−1
6ˆαn−1 +
xn − xn−1
3αn =
∫ b
aHn(x)g(x)dx
(8.10)Daca ınmultim a i− a ecuatie cu 6/(xi+1 − xi−1) obtinem
xi − xi−1
xi+1 − xi−1αi−1 + 2αi +
xi+1 − xi
xi+1 − xi−1αi+1 = 3βi i = 1, n
unde am luat
βi =∫ b
ag(x)Hi(x)dx =
2xi+1 − xi−1
∫ b
ag(x)Hi(x)dx
si s-a considerat x0 = x1, xn+1 = xn.

§8. Cea mai buna aproximare a functiilor continue 171
Matricea sistemului este tridiagonala si strict diagonal dominanta, deci sis-temul de mai sus are exact o solutie, solutie care poate fi eficient si stabilobtinuta prin eliminarea gaussiana fara pivotare.
Din cele de mai sus rezulta ca pentru orice element g ∈ C([a, b]) exista ununic element ın S1(∆n) si anume
∑ni=1 α1Hi = L1(f) astfel ca
‖L1(f)− f‖L2(a,b) ≤ ‖s− f‖L2(a,b), ∀ s ∈ S1(∆n)
unde (α1, · · · αn) este solutia sistemului (8.10). 2
Cum determinarea unui element de cea mai buna aproximare a unei functii ınnorma C([a, b]) este o problema dificila, vom analiza, ın continuare, eroareape care o facem ınlocuind elementul de cea mai buna aproximare pentru fcu L1(f), adica cu elementul de cea mai buna aproximare ın sensul normeidin L2(a, b) care am vazut, mai sus, ca se determina usor.
Teorema 8.5 Daca ∆n = xini=1 este o diviziune a intervalului [a, b] cu
a = x1 < x2 · · · < xn = b, si f ∈ C([a, b]) atunci
1) ‖L1(f)‖C[a,b] ≤ 3‖f‖C[a,b]
2) dist(f, S1(∆)) ≤ ‖f − L1(f)‖ ≤ 4 dist(f, S1(∆n))
unde dist(f, S1(∆n)) = infs∈S1(∆n) ||f − s||C([a,b]).
Demonstratie. 1) Daca |αj | = max1≤i≤n |αi| atunci din ecuatia j a sis-temului (8.10) obtinem
|2αj | = |3βj −( xj − xj1
xj+1 − xj−1αj−1 + αj+1
xj+1 − xj
xj+1 − xj−1
)| ≤
≤ 3|βj |+ |αj−1|| xj − xj1
xj+1 − xj−1|+ |αj+1| · | xj+1 − xj
xj+1 − xj1
| ≤ 3|βj |+ |αj |
deci
|αj | ≤ 3|βj | = 3|∫ b
ag(x)Hj(x)dx| ≤ 3‖f‖
∫ b
a|Hj(x)|dx =
= 3‖f‖∫ b
a| 2Hj(x)(xj+1 − xj−1)
|dx = 3‖f‖.
Dar
|L1(f)(x)| = |n∑
i=1
αiHi(x)| ≤n∑
i=1
|αi| ·Hi(x) ≤

172 Capitolul 3. Cea mai buna aproximare
≤ |αj | ·n∑
i=1
Hi(x) = |αj | ≤ 3‖f‖C([a,b])
2) Cum pentru s ∈ S1(∆n) avem L1(s) = s rezulta
‖f − L1f‖ = ‖f − s− L1(f − s)‖ ≤ ‖f − s‖+ ‖L1(f − s)‖ ≤
≤ ‖f − s‖+ 3‖f − s‖ = 4‖f − s‖deci
‖f − L1(f)‖ ≤ 4 inff∈S1(∆n)
‖f − s‖ = 4 dist(f, S1(∆n))
adicadist(f, S1(∆n)) ≤ ‖f − L1f‖ ≤ 4 dist(f, S1(∆n)).
Cea mai buna aproximare cu functii spline de ordinul m
Analog modului ın care s-a demonstrat ca ın norma uniforma problema celeimai bune aproximari nu are solutie unica ın S1(∆n) se arata ca problemacelei mai bune aproximari nu are solutie unica ın Sm(∆n), dar ın norma dinL2(a, b) aceiasi problema admite solutie unica. Folosind functiile B-splinenormalizate se poate arata ca elementul de cea mai buna aproximare a unuielement f din C([a, b]) se obtine rezolvınd un sistem algebric de n ecuatii cun necunoscute.

Capitolul 4
Integrarea si derivarea numerica
In capitolele anterioare s-au indicat scheme de aproximare ale unui elementdintr-un spatiu de functii X cu elemente dintr-un subspatiu finit dimen-sional Y. Scopul acestei capitol este analiza cıtorva scheme de aproximare aelementelor din dualul unui spatiu normat X.
9 Constructia formulelor de aproximare
In aceasta sectiune vom indica cıteva moduri de a proiecta o schema deaproximare a elementelor din dualul unui spatiu normat.
9.1 Scheme abstracte
Pentru a degaja o schema abstracta de aproximare a functionalelor liniarepe spatii normate sa incepem cu cıteva exemple simple.
• Daca ∆n = x1, . . . , xn cu a ≤ x1 < x2 < · · · < xn ≤ b, este o diviziune aintervalului [a, b] iar f este o functie din X = Cm([a, b]) se cere aproximareafunctionalei F : X−→R definita prin
F (f) =m∑
k=0
∫ b
af (k)(x)dgk(x) (9.1)
unde functiile gk : [a, b]−→R, 0 ≤ k ≤ m sınt functii cu variatie marginitadate, prin functionale de forma
L(f) =n∑
i=1
cif(xi) (9.2)
173

174 Capitolul 4. Integrarea si derivarea numerica
Prin alegerea convenabila a functiilor gk se pot obtine urmatoarele cazuriparticulare de functionale de tipul (9.1):
∫ b
aw(x)f(x)dx, f ′(ξ), . . . , f (m)(ξ)
si multe altele.
In aproximarea functionalelor (9.1) prin (9.2) se obtin formule de aproximarede urmatoarea forma:
∫ b
af(x)dg(x) '
n∑
i=1
cif(xi) (9.3)
numite formule de cuadratura ( formule de integrare numerica ) sauformule de forma
f (k)(ξ) 'n∑
i=1
cif(xi) (9.4)
numite formule de derivare numerica. In general, daca X este un spatiuliniar de functii reale, Λ = λ1, . . . , λn o multime de functionale liniare peX iar L : X−→R o functionala liniara definita prin
L(f) :=n∑
j=1
cjλj(f), f ∈ X (9.5)
unde c1, . . . , cn sınt numere reale, se doreste aproximarea unei functionaleF : X−→R prin functionale de forma (9.5), adica
F (f) ' L(f) =n∑
j=1
cjλj(f), ∀f ∈ X (9.6)
Este clar ca aproximantele de forma (9.3) si (9.4) sınt de forma (9.6), luındfunctionalele λi definite prin λi(f) = f(xi).
Problema care se pune, ın mod natural, este sa se indice un mod de alegerea constantelor c1, . . . , cn astfel ca formula de aproximare obtinuta sa fie cıtmai buna.
Pentru aceasta definim functionala liniara E : X−→R prin
E(f) := F (f)− L(f), ∀f ∈ X (9.7)

§9. Constructia formulelor de aproximare 175
care reprezinta restul formulei de aproximare. Evident, cınd X este un spatiunormat iar E este continua pe X , marimea ‖E‖ furnizeaza informatii asupracalitatii aproximarii functionalei F prin functionala L.
In multe probleme practice, eficacitatea formulelor de aproximare a functio-nalelor liniare se masoara prin gradul de exactitate ın raport cu unsubspatiu Y al spatiului X.
Definitia 9.1 Formula de aproximare F (f) ' L(f) se spune ca esteexacta pe subspatiul Y daca E(f) = 0 pentru orice f ∈ Y si existaf ∈ X \ Y pentru care E(f) 6= 0.
In deducerea formulelor de tipul (9.3) si (9.4) se poate folosi o idee, in-spirata de Newton, ce consta in interpolarea functiei f si apoi deducereacoeficientilor c1, . . . , cn astfel ca formula de aproximare sa fie exacta pen-tru functia interpolata. Pentru a fi mai expliciti, fie p = P (f ; x1, · · · , xn;x)polinomul de interpolare Lagrange asociat functiei f pe nodurile x1, . . . , xn,adica
f(x) ' p(x) =n∑
i=1
f(xi)li(x)
unde
li(x) =n∏
j=1,j 6=i
(x− xj)(xi − xj)
, i = 1, . . . , n
sınt polinoamele de interpolare Lagrange cu proprietatile
li(xj) = δij ∀ i, j ∈ 1, . . . , n.
Daca vrem sa derivam pe f ıntr-un punct ξ ∈ [a, b] scriem
f ′(ξ) ' p′(ξ) =n∑
i=1
f(xi)ci
unde ci = l′i(ξ), sau daca vrem sa integram, atunci
∫ b
aw(x)f(x)dx '
∫ b
aw(x)p(x)dx =
n∑
i=1
cif(xi)
unde ci =∫ b
aw(x)li(x)dx.

176 Capitolul 4. Integrarea si derivarea numerica
In general, pentru orice fel de functionala liniara F procedam astfel
F (f) ' F (p) =n∑
i=1
cif(xi) (9.8)
unde ci = F (li), i ∈ 1, . . . , n.Daca f ∈ Pm−1, atunci formulele de mai sus dau valori exacte, adica 'poate fi ınlocuit cu =, ın toate cazurile, pentru ca f(x) = p(x) pentru oricex. Acesta este un mare avantaj pentru analiza numerica practica. Dar samergem mai departe. Cum putem capata ( obtine ) c1, . . . , cn din (9.8) faraa utiliza polinoamele de interpolare ?
Coeficientii c1, . . . , cn pot fi determinati corect din ( 9.8) daca sıntem sigurica (9.8) este o egalitate pentru orice f ∈ Pn−1. Acesta va fi cazul, daca ci
sınt solutiile sistemului de ecuatii liniare
F (xr) =n∑
i=1
cixri , r ∈ 0, 1, . . . , n− 1 (9.9)
Acesta este un sistem de n ecuatii cu n necunoscute cu determinantul diferitde zero ( determinant Vandermonde ). Cu ci care satisfac (9.9) putem scrieıntotdeauna
F (f) =n∑
i=1
cif(xi) + E(f) (9.10)
unde E(f) este restul care, fireste, se va anula pentru f ∈ Pn−1 dar existaf 6∈ Pn−1 pentru care E(f) 6= 0. Daca se interpoleaza functia f prin altefunctii, evident, se obtin alte formule de aproximare pentru F (f).
9.2 Metode compozite de integrare numerica
Pentru aproximarea integralei∫ β
αf(x)dx se descompune, uneori, intervalul
[α, β] ın k intervale [αi, αi+1], i = 1, . . . , k si apoi se aproximeaza fiecare inte-
grala∫ αi+1
αi
f(x)dx, aproximınd functia f printr-un polinom de interpolare
pe intervalul [αi, αi+1]. Dam cıteva exemple de astfel de formule:
Exemplul 9.1 In intervalele [αi, αi+1] ınlocuim functia f printr-un polinomde gradul zero p0(x) = f(ξ), unde ξ ∈ [αi, αi+1], si se obtine
∫ β
αf(x)dx ' Rk(f) =
k∑
i=1
(αi+1 − αi)f(ξi).

§9. Constructia formulelor de aproximare 177
Alegerile curente pentru ξi sınt :
• ξi = αi si se obtine
∫ β
αf(x)dx ' R−
k (f) =k∑
i=1
(αi+1 − αi)f(αi)
(formula dreptunghiului la stınga );
• ξi = αi+1 si se obtine
∫ β
αf(x)dx ' R+
k (f) =k∑
i=1
(αi+1 − αi)f(αi+1)
(formula dreptunghiului la dreapta );
• ξi = αi+1/2 =αi + αi+1
2si se obtine
∫ β
αf(x)dx ' Mk(f) =
k∑
i=1
(αi+1 − αi)f(αi+1/2)
(formula punctului median ).
Formulele de mai sus se obtin, ın fapt, prin aproximarea functiei f printr-ofunctie ın scara si apoi inlocuind integrala functiei f prin integrala functieiın scara cu care s-a aproximat functia f pe intervalul [a, b].
Exemplul 9.2 In fiecare interval [αi, αi+1] se ınlocuieste f printr-un poli-nom, p1, de gradul ıntıi care interpoleaza f ın punctele αi, αi+1 si obtinem
∫ αi+1
αi
f(x)dx '∫ αi+1
αi
p1(x)dx =αi+1 − αi
2[f(αi) + f(αi+1)]
apoi sumınd rezulta formula
∫ β
αf(x)dx ' Tk(f) =
k∑
i=1
αi+1 − αi
2[f(αi) + f(αi+i)]
numita si formula trapezului .

178 Capitolul 4. Integrarea si derivarea numerica
Formula de mai sus se obtine prin aproximarea functiei f cu o functie splinede ordinul ıntıi de interpolare pe nodurile diviziunii ∆n a intervalului [α, β]cu α = α1 < α2 < · · · < αk+1 = β, adica se ınlocuieste integrala functiei fcu integrala functiei sf pe intervalul [α, β], adica prin
∫ β
αsf (x)dx =
k∑
i=1
f(αi)ci
unde ci =∫ β
αHi(x)dx. Tinınd seama de forma functiilor Hi obtinem
c1 =α2 − α1
2, ck =
αk+1 − αk
2, ci =
αi+1 − αi−1
2∀i ∈ 2, . . . , k − 1.
Exemplul 9.3 Pe intervalul [αi, αi+1] se aproximeaza functia f cu un poli-nom Hermite de gradul ıntıi ce interpoleaza f ın αi+1/2, adica
p(αi+1/2) = f(αi+1/2), p′(αi+1/2) = f ′(αi+1/2),
unde αi+1/2 = (αi + αi+1)/2. Determinınd p si apoi integrınd se obtine∫ αi+1
αi
f(x)dx '∫ αi+1
αi
p(x)dx = (αi+1 − αi)f(αi+1/2)
de unde rezulta
∫ b
af(x)dx '
k∑
i=1
f(αi+1/2)(αi+1 − αi)
adica formula punctului median.
Formula de mai sus s-a obtinut prin interpolarea functiei f cu o functiepolinomiala pe portiuni, pe fiecare portiune polinomul fiind de gradul ıntıi.
9.3 Constructia generala a formulelor de cuadraturacompuse
Luınd hi = αi+1 − αi, efectuınd schimbarea de variabila
x =αi + αi+1 + s(αi+1 − αi
2

§9. Constructia formulelor de aproximare 179
si considerınd functia ϕi : [−1, 1] → R definita prin
ϕi(s) = f(x) = f(αi + αi+1
2+ s
αi+1 − αi
2
)
avem ∫ αi+1
αi
f(x)dx =hi
2
∫ 1
−1ϕi(s)ds
ceea ce revine la a aproxima integrala pe un interval fixat [−1, 1]. Pentru a
calcula∫ 1
−1ϕ(s)ds se iau l+1 puncte distincte τ0, τ1, . . . , τl si se aproximeaza
functia ϕ prin polinomul de interpolare pϕ de grad ≤ l ın punctele τj ( adicapϕ(τi) = ϕ(τi), i ∈ 0, 1, . . . , l ) si apoi se integreaza polinomul pϕ peintervalul [−1, 1] obtinındu-se
∫ 1
−1ϕ(s) '
∫ 1
−1pϕ(s)ds = 2
l∑
j=0
ωjϕ(τj) (9.11)
unde
ωj =12
∫ 1
−1lj(s)ds, iar lj(s) =
l∏
i=0,i6=j
s− τi
τj − τij ∈ 0, 1, . . . , l.
Remarcam ca formula (9.11) este exacta daca ϕ este un polinom avınd gradul≤ l. Aplicınd formula (9.11) functiilor ϕi obtinem
∫ αi+1
αi
f(x)dx ' hi
l∑
j=0
ωjf(αij)
undeαij =
αi + αi+1
2+ τj
αi+1 − αi
2.
Remarcam ca aceiasi formula de aproximare s-ar fi obtinut daca am fi ınlocuit,direct, functia f prin polinomul Lagrange de interpolare de gradul ≤ l ınpunctele αi0, αi1, . . . , αil. Interesul pentru intervalul [−1, 1] este ca permitetratarea unitara, independenta de intervalul (αi, αi+1), ceea ce demonstreazaın particular ca ωj nu depinde de i. Revenind la intervalul [α, β] obtinem
∫ β
αf(x)dx ' Tkl(f) =
k−1∑
i=0
(hi
l∑
j=0
ωjf(αij))
(9.12)

180 Capitolul 4. Integrarea si derivarea numerica
Remarcam faptul ca formula (9.12) se poate obtine aproximınd functia fprintr-o functie, h, polinomiala pe portiuni de grad ≤ l cu proprietatea
h(αij) = f(αij), j ∈ 0, 1, . . . , l, i ∈ 1, . . . , k
si apoi ınlocuind integrala lui f cu integrala lui h.
Formula (9.11) se numeste formula de integrare numerica elementaraiar (9.12) se numeste formula de integrare numerica compusa .
Formulele Newton - Cotes
Din ratiuni practice se alege, deseori, ın formula de cuadratura elementaranodurile τj echidistante. In particular, daca
τj = −1 +2j
l, j ∈ 0, 1, . . . , l
formulele (9.11) care se obtin se numesc formulele Newton - Cotesınchise. Aceste formule sınt exacte, prin constructie, pentru polinoamelede grad ≤ l, dar din motive de simetrie, avem ωl−j = ωj pentru orice j ∈0, 1, . . . , l si deci formula elementara este exacta pentru orice functie ϕimpara pe [−1, 1]. In concluzie, formula (9.11) este exacta pentru ϕ ∈ Pl
daca l este impar si pentru ϕ ∈ Pl+1 daca l este par ( caci functia s → sl+1
este impara pe intervalul [−1, 1], si deci formula (9.11) este exacta ).
Cıteva formule Newton–Cotes, mai des folosite, sınt amintite mai jos.
• Pentru l = 1 se obtine formula trapezului care este exacta pentruϕ ∈ P1 si avem ω0 = ω1 = 1/2 adica formula (9.11) devine
∫ 1
−1ϕ(s)dx ' ϕ(−1) + ϕ(1).
• Pentru l = 2, se obtine formula Simpson care este exacta pentruϕ ∈ P3 si ın acest caz avem ω0 = ω2 = 1/6 iar ω1 = 2/3, deci formula(9.11) devine
∫ 1
1ϕ(s)ds ' 1
3[ϕ(−1) + 4ϕ(0) + ϕ(1)].

§9. Constructia formulelor de aproximare 181
• Pentru l = 4, se obtine formula Boole - Villarceau care este exactapentru ϕ ∈ P5 si ın acest caz avem ω0 = ω4 = 7/90, ω1 = ω3 = 16/45,ω2 = 2/15, deci formula (9.11) devine
∫ 1
−1ϕ(s)ds ' 1
90
[7ϕ(−1) + 32ϕ(−1
2) + 12ϕ(0) + 32ϕ(
12) + 7ϕ(1)
].
• Pentru l = 6, se obtine formula Weddle ( sau Hardy ) care este exactapentru ϕ ∈ P7 si ın acest caz ω0 = ω6 = 41/840, ω1 = ω5 = 9/35,ω2 = ω4 = 9/280, ω3 = 34/105.
Pentru j ∈ 1, 2, . . . , l − 1 se demonstreaza ca
ωj ' (−1)j−1Cjl
l ln2 l
1j
+(−1)l
l − j
si ω0 = ωl ' 1
l ln l
prin urmare pentru l mare, coeficientii devin mari si de semne amestecate,ceea ce face ca aceste formule sa fie foarte sensibile la erorile de rotunjire.Aparitia ωj < 0 ıncepe cu l = 8, prin urmare formulele Newton-Cotes sıntutilizate practic pentru l ≤ 7.
Observatie. Se pot construi, ıntr-o maniera analoga, formulele de cuadratura(9.11) cu modurile τj echidistante pe [−1, 1] dar care nu contin punctele −1si 1. Putem lua de exemplu
τj = −1 +2j + 2l + 2
, j ∈ 0, 1, . . . , l.
Formulele astfel obtinute se numesc formulele Newton-Cotes deschise sauformule Steffensen
9.4 Metode de integrare numerica de tip Gauss
In formulele ce au fost obtinute, pına acum, se dadeau nodurile si se ıncercasa se obtina coeficientii. In cele ce urmeaza vom indica o metoda, urmındpe Gauss, pentru obtinerea nodurilor si a coeficientilor pentru ca formula decuadratura sau de derivare numerica sa fie cıt mai exacta.
Se considera x0, . . . , xl−1 puncte interioare intervalului (α, β) si xl, . . . , xk
puncte exterioare intervalului (α, β) si se cauta o formula de integrala nu-merica de forma ∫ β
αf(x)w(x)dx '
k∑
i=0
λif(xi). (9.13)

182 Capitolul 4. Integrarea si derivarea numerica
Avem deci k ≥ l − 1 si l ≥ 0, ( cazul k = l − 1 corespunde situatiei cındnu avem puncte exterioare intervalului (α, β), iar l = 0 cazului cınd toatepunctele sınt exterioare intervalului (α, β) ).
Lema 9.1 Fiind date doua numere ıntregi k si l verificınd k + 1 ≥ l ≥ 0 sik + 1 − l numere reale fixate xl, · · · , xk exterioare intervalului (α, β), existao formula si una singura de forma (9.13) care sa fie de ordinul k + l.
Demonstratie. a)Unicitatea. Polinomul Πki=l(x − xi) pastreaza un semn
constant pe intervalul (α, β). Putem alege deci ε = ±1 astfel ca functia
θ(x) = εw(x)k∏
i=0
(x− xi)
sa fie > 0 pe intervalul (α, β). Luınd
pl(x) =l−1∏
i=0
(x− xi),
pentru orice polinom q de grad ≤ l − 1 avem∫ β
αpl(x)q(x)θ(x)dx = ε
∫ β
α
k∏
i=0
(x− xi)q(x)w(x)dx = 0,
caci formula (9.13) este exacta pentru f(x) = q(x)∏k
i=0(x− xi) si f(xi) = 0pentru i ∈ 0, 1, . . . , k. Rezulta ca pl este al l + 1-lea polinom ortogonalpentru ponderea θ(x) pe (α, β), radacinile reale x0, x1, . . . xl−1 sınt definiteın mod unic. In plus, scriind ca formula (9.13) este exacta pentru polinomulLagrange
li(x) =k∏
j=0,j 6=i
x− xi
xi − xj,
obtinem ci =∫ β
αli(x)w(x)dx, de unde rezulta unicitatea coeficientilor ci.
b) Existenta. Notam prin x0, . . . , xl−1 cele l radacini ale celui de-al l + 1-lea polinom ortogonal pentru θ(x) pe (α, β). Stim, din Teorema 1.6, caaceste radacini sınt distincte si ca ele apartin intervalului (α, β). Presupunınd
ci =∫ β
αi
li(x)w(x)dx, avem
k∑
i=0
cif(xi) =∫ β
αP (f ;x0, . . . , xk; x)w(x)dx

§9. Constructia formulelor de aproximare 183
unde P (f ;x0, . . . , xk; x) este polinomul de interpolare Lagrange pentru functiaf pe nodurile x0, . . . , xk. Formula (9.13) este atunci exacta pentru poli-noamele de grad ≤ k. Presupunem acum ca f este un polinom de grad≤ k + l. Exista atunci doua polinoame q de grad ≤ l − 1 si r de grad ≤ kastfel ca
f(x) = q(x)k∏
i=0
(x− xi) + r(x).
Avem deci
∫ β
αf(x)w(x)dx =
∫ β
αq(x)
l−1∏
i=0
(x− xi)θ(x)dx +∫ β
αr(x)w(x)dx =
=∫ β
αq(x)pl(x)θ(x)dx +
∫ β
αr(x)w(x)dx =
∫ β
αr(x)w(x)dx =
=k∑
i=0
cir(xi) =k∑
i=0
cif(xi).
Formula (9.13) este exacta pentru polinomul de grad k + l 2
• Aplicınd Lema 9.1 cu k = l − 1 obtinem urmatorul rezultat.
Teorema 9.1 Exista o formula de integrare numerica si numai una deforma (9.13) (cu k + 1 puncte ) de ordin 2k + 1; ea se obtine alegınd xi
radacinile celui de-al (k + 2)-lea polinom ortogonal pentru ponderea w pe
(α, β) si luınd ci =∫ β
αl2i (x)w(x)dx. In plus avem pentru orice
i ∈ 0, 1, . . . , k ci > 0.
Demonstratie. Ramıne sa aratam ca ci > 0. Scriind ca formula (9.13) este
exacta pentru f(x) = l2i (x) obtinem ci =∫ β
αl2i (x)w(x)dx > 0. 2
Avem urmatoarele tipuri de formule.
• cınd w(x) = 1 pe (α, β), formula Gauss–Legendre;
• cınd w(x) = (1− x2)−1/2 pe (−1, 1) formula Gauss–Cebısev;
• cınd w(x) = e−x2pe (−∞,+∞) formula Gauss–Hermite;
• cınd w(x) = e−xxa pe (0,∞) formula Gauss-Laguerre.

184 Capitolul 4. Integrarea si derivarea numerica
Observatie. Formula punctului median corespunde metodei Gauss–Legendrepentru k = 2 . Pentru formula Gauss-Cebısev nodurile si ponderile se deter-mina usor astfel ca formula este de forma
∫ 1
−1f(x) · (1− x2)−1/2dx =
π
k + 1
k∑
i=0
f(cos
(2i + 1)π2(k + 1)
).
Utilizınd Lema 9.1 pentru k= l+1, x0 = α, xk = β obtinem urmatorulrezultat.
Teorema 9.2 Exista o metoda de integrare numerica si numai una de forma(9.13) de ordin 2k− 1 astfel ca x0 = α si xk = β. Aceasta formula se obtinealegınd pentru xi 1 ≤ i ≤ k−1 ca radacinile celui de-al k-lea polinom ortogo-
nal pentru ponderea w(x)(x−α)(β−x) pe (α, β) si luınd ci =∫ β
αli(x)w(x)dx.
In plus, ci > 0 ∀i ∈ 0, 1, . . . , k.
Demonstratie. Luam li definite prin
li =x− α
xi − α
k−1∏
j=1,j 6=i
( x− xj
xi − xj
)2 · β − x
β − xi
daca i 6= 0 si i 6= k,
l0(x) =β − x
β − α
k−1∏
j=1
(x− xj
α− xj
)2, lk(x) =
x− α
β − α
k−1∏
j=1
(x− xj
β − xj
)2.
Aceste polinoame sınt de grad ≤ 2k − 1 si sınt ≥ 0 pe (α, β). Scriind caformula (9.13) este exacta pentru aceste polinoame, obtinem
cj =∫ β
αli(x)w(x)dx > 0.
2
Aceasta metoda se utilizeaza, adesea, cınd w = 1 si ea se numeste formulaGauss-Lobatta.
Observatie. Pentru k = 1 se regaseste formula trapezului iar pentru k = 2se obtine formula Simpson.
• Cınd se utilizeaza Lema 9.1 cu k = l si xk = β (respectiv xk = α), se obtineo metoda, ce se numeste metoda Gauss-Radau la dreapta

§10. Evaluarea erorii in formulele de aproximare 185
( respectiv la stınga ) de ordin 2k; Coeficientii ci sınt, ınca, pozitivi. Acestemetode sınt deseori utilizate pentru constructia schemelor de rezolvare aecuatii diferentiale. In afara cıtorva cazuri particulare, ca metoda Gauss-Cebısev, nu se cunoaste o formula explicita pentru punctele de integrare xi
si ponderile ci din formulelor Gauss. Pentru a utiliza aceste formule, estenecesar deci sa se scrie un program care sa permita calcularea coeficientilorxi si ci, fie sa se utilizeze table ın care se gasesc nodurile xi si coeficientiici calculati pentru ponderile w(x) curent folosite. (Cititorul este rugat savada, de exemplu, Stroud si Secrest [93] unde coeficientii sınt dati cu 30 dezecimale ).
10 Evaluarea erorii ın formulele de aproximare
Daca avem o formula de aproximare de forma (9.6), care este exacta pesubspatiul Y , este important sa avem o idee despre marimea erorii
E(f) = F (f)−n∑
i=1
ciλi(f).
10.1 Forma integrala a restului
Pentru formulele de aproximare care sınt exacte pe PN , spatiul polinoamelorde grad cel mult N , avem urmatorul rezultat.
Teorema 10.1 (Peano) Daca metoda de integrare numerica ( derivare nu-merica ) de tipul (9.2) este de ordinul N ≥ 0 si f ∈ CN+1([a, b]), atunci
E(f) =1
N !
∫ b
aKN (t)f (N+1)(t)dt
unde KN (t) = E(x −→ (x− t)N
+
)se numeste nucleul lui Peano.
Demonstratie. Din formula Taylor utilizata pentru punctul a avem
f(x) = pN (x) +1
N !
∫ x
a(x− t)Nf (N+1)dt =
pN (x) +1
N !
∫ b
a(x− t)N
+f (N+1)(t)dt

186 Capitolul 4. Integrarea si derivarea numerica
unde pN este un polinom de grad ≤ N dat prin
pN (x) =N∑
i=0
f (i)(a)(x− a)i
i!.
Cum formula (9.2) este de ordinul N avem
E(f) = E(pN ) +1
N !E
(x →
∫ b
a(x− t)N
+f (N+1)(t)dt)
=
1N !
β∫
α
[w(x)
b∫
a
(x− t)N+f (N+1)(t)dt
]dx−
k∑
i=0
ci
∫ b
a(xi − t)N
+f (N+1)(t)dt =
=1
N !
∫ b
a
∫ β
α(x− t)N
+w(x)dx−k∑
i=0
λi(xi − t)N+
f (N+1)(t)dt =
=1
N !
∫ b
aKN (t)f (N+1)(t)dt
2
• In cazul unei formule de integrare numerica de tipul (9.3) avem
KN (t) =∫ b
aw(x)(x− t)N
+dt−k∑
i=1
ci(xi − t)N+
iar pentru o formula de aproximare numerica a derivatei unei functii fıntr-un punct ξ avem
KN (t) =d(x− t)N
+
dx|x=ξ −
k∑
i=1
ci(xi − t)N+ =
= N(ξ − t)N−1+ −
k∑
i=1
ci(xi − t)N+ .
• In cazul unei formule de cuadratura compusa nucleul lui Peano are forma
KN (t) =k∑
i=1
(hi
2
)N+1kN
(2t− αi − αi+!
hi
)(10.1)

§10. Evaluarea erorii in formulele de aproximare 187
unde kN este nucleul lui Peano pentru formula de cuadratura elementara,adica
kN (t) =∫ 1
−1(s− t)N
+ds− 2l∑
j=0
ωj(τj − t)N+ .
Intr-adevar, efectuınd ın
KN (t) =k∑
i=1
[∫ αi+1
αi
(xt)N+dx− (αi+1 − αi)
l∑
j=0
ωj(αij − t)N+
]
schimbarea de variabila
x =αi + αi+1
2+ s
αi+1 − αi
2
obtinem
KN (t) =k∑
i=1
hi
2
∫ 1
−1
(αi + αi+1 + shi
2− t
)N
+ds
−2N−1∑
j=0
ωj
(αi + αi+1 + τjhi
2− t
)N
+=
=k∑
i=1
(hi
2)N+1
[∫ 1
−1(s− 2t− αi − αi+1
hi)N+ds−2
l∑
j=0
ωj(τj− 2t− αi − αi+1
hi)N+
]
10.2 Evaluarea restului pentru formulele de aproximare deordinul N
Tinınd seama de forma ıntegrala a restului unei formule de aproximare avemurmatorul rezultat.
Teorema 10.2 In ipotezele teoremei lui Peano avem
|E(f)| ≤ 1N !
MN+1
∫ b
a|KN (t)|dt
unde Mj = maxa≤x≤b
|f (j)(x)|. In plus, daca KN pastreaza un semn constant pe
[a, b], atunci exista ξ ∈ [a, b] astfel ca
E(f) =f (N+1)(ξ)(N+!)!
E(x −→ xN+1) (10.2)

188 Capitolul 4. Integrarea si derivarea numerica
Demonstratie. Cum
E(f) =1
N !
∫ b
aKN (t)f (N+1)(t)dt (10.3)
avem
|E(f)| ≤ 1N !
supa≤t≤b
|f (N+1)(t)|∫ B
a|KN (t)|dt =
1N !
MN+1
∫ b
a|KN (t)|dt.
Folosind o formula de medie ın (10.3) obtinem
E(f) = f (N+1)(ξ)1
N !
∫ b
aKN (t)dt
Pentru functia g(x) = xN+1 avem
E(g) =1
N !
b∫
a
KN (t)g(N+1)(t)dt =1
N !
b∫
a
(N+1)!KN (t)dt = (N+1)b∫
a
KN (t)dt
Deci ∫ b
aKN (t)dt =
1N + 1
E(x −→ xN+1),
de unde obtinem formula (10.3). 2
Observatie. In general, nucleul lui Peano nu pastreaza semn constant.
Pentru a vedea acest lucru sa consideram formula de integrare numerica∫ β
αf(x)dx ' (β − α)f(c) (10.4)
• Daca c 6= (α + β)/2, formula (10.4) este de ordinul N = 0. Intr-adevar,pentru functia constanta formula este exacta iar pentru f(x) = x avem
E(f) = (β − α)(α + β
2− c
).
Nucleul lui Peano are forma
K0(t) =∫ b
a(x− t)0+dx− (β − α)(c− t)0+.
Cum∫ β
α(x− t)0+dt =
β − α daca t < αβ − t daca α ≤ t ≤ β0 daca β ≤ t

§10. Evaluarea erorii in formulele de aproximare 189
iar
(β − α)(c− t)0+ =
β − α daca t ≤ c0 daca c < t
functia t → K0(t) are ın raport de pozitia lui c fata de α si β alura indicatamai jos.
-
6
AAAA
.....................
.....................
daca c ≤ α,
-
6
@@
@@
@@
@@
.....................
....
....
....
....
....
.
daca α < c < β,
-6
AAAA
.....................
.....................
daca β ≤ c.
Se constata usor ca nucleul K0 pastreaza un semn constant pe [a, b] daca sinumai daca c 6∈ (α, β), si atunci avem
E(f) = f ′(ξ)(β − α)(α + β
2− c
).
• Daca c = (α + β)/2, formula (10.4) este de ordinul N = 1.
Intr-adevar, formula este exacta pentru polinoamele de gradul ıntıi, iar pen-tru functia g(x) = x2 avem
E(g) =∫ β
αx2dx− c2(β − α) = −(β − α)3
126= 0.

190 Capitolul 4. Integrarea si derivarea numerica
Nucleul lui Peano pentru formula (10.4) este pentru orice t ∈ [α, β],
K1(t) = min(β − t)2)
2,(t− α)2
2
≥ 0
si avem
E(f) = f ′′(ξ)(β − α)3
24.
2
In cele ce urmeaza se dau conditii suficiente care asigura pozitivitateanucleului lui Peano.
Teorema 10.3 Fie x0, x1, . . . , xl−1 punctele distincte ce apartin (α, β) sixl, . . . , xk punctele exterioare intervalului (α, β). Daca metoda (9.2) este deordinul N ≥ k + l atunci KN pastreaza semn constant, N = k + l si existaξ ∈ [a, b] = cox0, . . . , xk, α, β astfel ca
E(f) =f (k+l+1)(ξ)(k + l + 1)!
∫ β
απ(x)w(x)dx (10.5)
unde
π(x) =l−1∏
i=0
(x− xi)2 ·k∏
j=l
(x− xj).
Demonstratie.
a) Fie p polinomul de gradul ≤ k + l astfel ca p(xi) = f(xi), 0 ≤ i ≤ k sip′(xi) = f ′(xi), 0 ≤ i ≤ l − 1. Cum formula (9.13 ) este de ordin N ≥ k + lavem ∫ β
αp(x)w(x)dx =
k∑
i=0
cip(xi) =k∑
i=0
cif(xi).
de unde deducem
E(f) =∫ β
α(f(x)− p(x))w(x)dx.
Din teorema de reprezentare a restului la interpolarea prin polinoame stimca exista ξx ∈ [a, b] = cox0, x1, . . . , xk, α, β astfel ca
f(x)− p(x) =π(x)
(k + l + 1)!f (k+l+1)(ξx).

§10. Evaluarea erorii in formulele de aproximare 191
Notam prin m si M marginea inferioara si marginea superioara a functieif (k+l+1) pe [a, b]. Cum π pastreaza un semn constant pe (α, β), E(f) estecuprins ıntre
m
(k + l + 1)!
∫ β
απ(x)w(x)dx si
M
(k + l + 1)!
∫ β
απ(x)w(x)dx.
Cınd E(f) este strict cuprins ıntre cele doua cantitati rezulta ca exista ξ ∈(a, b) astfel ca
(k + l + 1)!E(f)/∫ β
απ(x)w(x)dx = fk+l+1)(ξ).
Cınd
E(f) =m
(k + l + 1)!
∫ β
απ(x)w(x)dx
obtinem ∫ β
α(f(x)− p(x)− mπ(x)
(k + l + 1)!)w(x)dx = 0.
Integrantul fıind de semn constant, deducem f(x) = p(x) +mπ(x)
(k + l + 1)!pentru orice x ∈ [α, β], de unde f (k+l+1)(x) = m, ∀ x ∈ [α, β]. Putem luaξ = (α + β)/2. Putem face acelasi rationament ınlocuind pe m cu M .
b) Utilizınd formula (10.5) deducem
E(x → xk+l+1) =∫ β
απ(x)w(x)dx 6= 0,
de unde rezulta ca metoda (9.2) nu este de ordin ≥ k + l +1, deci N = k + l.
c) Daca KN nu pastreaza un semn constant pe [a, b], putem gasi o functieϕ ∈ C0([a, b]) astfel ca,
∫ b
aKN (t)ϕ(t)dt 6= ϕ(x)
∫ b
aKN (t)dt ∀ x ∈ [a, b].
( Putem lua, de exemplu, ϕ(t) = KN (t)+ daca∫ b
aKN (t)dt ≤ 0). Fie f o
functie astfel ca f (N+1) = ϕ. Din teorema lui Peano, pentru orice x ∈ [a, b]avem
E(f) =1
N !
∫ b
aKN (t)ϕ(t)dt 6= ϕ(x)
N !
∫ b
aKN (t)dt =

192 Capitolul 4. Integrarea si derivarea numerica
=ϕ(x)N !
E(x −→ xN+1) =f (N+1)(x)(N + 1)!
∫ β
απ(t)w(t)dt
ceea ce este ın contradictie cu ceea ce a fost obtinut la punctul a). 2
Studiul erorii ıntr-o metoda compusa
Este clar ca, daca formula elementara este de ordinul N , atunci formula decuadratura compusa are cel putin acelasi ordin.
Teorema 10.4 Daca formula de cuadratura elementara este de ordinul N,iar f ∈ CN+1([a, b]), atunci
|E(f)| ≤ CN (β − α)hN+1MN+1
unde
CN =1
2N+2N !
∫ +∞
−∞|kN (x)|dx, h = max
ihi, Mk = max
x∈[a,b]f (k)(x)|.
In plus, daca nucleul lui Peano pentru formula elementara, kN , pastreazasemn constant, atunci exista ξ ∈ [a, b] astfel ca
E(f) = C∗Nf (N+1)(ξ)
k−1∑
i=0
hN+2i
unde
C∗N =
12N+2(N + 1)!
(∫ 1
−1xN+1dx− 2
l∑
j=0
ωjτN+1j
).
Demonstratie. Din teorema lui Peano avem
E(f) =!
N !
∫ b
aKN (t)f (N+1)(t)dt
unde
KN (t) =k∑
i=1
(hi
2
)N+1kN
(2t− αi − αi+1
hi
)
iar
kN (t) =∫ 1
−1(s− t)N
+ds− 2l∑
j=0
ωj · (τj − t)N+

§10. Evaluarea erorii in formulele de aproximare 193
de unde obtinem
|E(f)| ≤ MN+1
N !
k∑
i=1
(h2
2
)N+2∫|kN (x)dx ≤ MN+1
N !2N+2(β−α)hN+1
∫|kN (x)dx.
Daca kN pastreaza un semn constant, rezulta ca KN pastreaza semn constantdeci, din Teorema 10.2, exista ξ ∈ [a, b] astfel ca
E(f) =f (N+1)(ξ)
N !
∫ b
aKN (t)dt =
fN+1(ξ)N !
k∑
i=1
(hi
2
)N+1∫ +∞
−∞kN (t)dt
care termina demonstratia. 2
Remarca 10.1 Daca hi sınt constante, obtinem
E(f) = C∗N (β − α)hN+1f (N+1)(ξ).
Teorema 10.4 se aplica, ın particular, formulelor compuse bazate pe formuleleelementare Newton-Cotes ınchise. Daca presupunem ca intervalul [α, β] afost ımpartit ın k-subintervale de aceiasi lungime h = (β − α)/k se obtinurmatoarele formulele de aproximare
∗ metoda trapezului compusa
∫ β
αi
f(x)dx = hf(α) + f(β)
2+
k−1∑
i=1
f(xi)− h2
12(β − α)f ′′(ξ).
∗ metoda Simpson compusa
∫ β
αf(x)dx =
h
6
f(α)+f(β)+4
k−1∑
i=0
f(xi+ 12)+2
k−1∑
i=1
f(xi)− h4
2880(β−α)f (4)(ξ).
∗ metoda Boole–Villarceau compusa
E(f) = −h6(β − α)1935360
f (6)(ξ).
unde am notat xµ = α + µh.
Putem obtine formule analoage utilizınd o formula de cuadratura elementaraNewton-Cotes deschisa.

194 Capitolul 4. Integrarea si derivarea numerica
11 Formule de cuadratura optimale
Din teorema lui Peano stim ca daca o formula de integrare numerica( derivare numerica ) de tipul
F (f) ' L(f) =n∑
i=1
cif(xi) (11.1)
este de ordinul N ≥ 0 iar f ∈ C(N+1)([a, b]) atunci restul se scrie sub forma
E(f) =∫ b
aK(t)f (N+1)(t)dt (11.2)
undeK(t) =
1N !
E(x ; (x− t)N+ ).
Observam ca functia K nu depinde de f ci numai de c1, · · · , cn. DacaN = n− 1 coeficientii c1, . . . , cn se pot determina ın mod unic din sistemul
n∑
i=1
cixki = F (xk) k ∈ 0, 1, · · · , n− 1.
11.1 Formule optimale ın sensul lui Sard
Pentru determinarea coeficientilor c1, . . . , cn ce intra ın formula (11.1), Sardprocedeaza astfel: Se considera multimea
Br =f : [a, b] → R;
∫ b
af (m)(t)dt ≤ r2
si se observa ca pentru eroarea E(f) are loc majorarea urmatoare
|E(f)|2 ≤ r2∫ b
aK(t)2dt pentru orice f ∈ Br.
Se aleg parametrii c1, · · · , cn astfel ca expresia∫ b
aK(t)2dt sa fie minima.
Spunem ca functionala
L(f) =n∑
i=1
cif(xi),

§11. Formule de cuadratura optimale 195
este optimala (de ordinul m) ın sensul lui Sard, daca nucleul Peano de ordinulm care-i corespunde verifica
∫ b
aK(t)2dt ≤
∫ b
aK(t)dt,
pentru toate nucleele Peano K de ordinul m ce corespund unei formule deaproximare de forma (11.1) care este exacta pentru polinoamele de grad≤ m− 1.
Putem determina coeficientii c1, · · · , cn astfel ca formula de aproximare (11.1)sa fie exacta pentru functiile spline naturale de gradul 2m − 1, adicaSN2m−1(∆n) unde ∆n = x1, · · ·xn este o diviziune a intervalului [a, b]cu
a < x1 < x2 < · · · < xn < b.
Reamintim ca SN 2m−1(∆n) este un spatiu n-dimensional si exista σ1, · · · , σn
functii spline naturale de baza astfel ca
σi(xj) = δij , i, j ∈ 1, · · · , n.
Aproximınd functia f cu functia spline naturala de interpolare
sf =n∑
i=1
f(xi)σi
si ınlocuind integrala lui f cu integrala lui sf obtinem urmatoarea aproxi-mare
L(f) =n∑
i=1
cif(xi)
unde ci =∫ b
aσi(x)dx sau ın general ci = F (σi). Formula astfel obtinuta
este exacta pentru functiile spline naturale de ordinul 2m− 1.
Urmatorul rezultat da legatuta dintre formula de aproximare optimala ınsensul lui Sard de ordinul m si formula de aproximare utilizınd functiilespline naturale de gradul 2m− 1.
Teorema 11.1 Unica functionala de aproximare exacta pentru functii splinenaturale de gradul 2m− 1 este identica cu unica functionala de aproximareoptimala ın sensul lui Sard de ordinul m.

196 Capitolul 4. Integrarea si derivarea numerica
Demonstratie. Fie L(f) =∑n
i=1 cif(xi) (cu ci = F (σi)) functionala deaproximare exacta pentru functiile spline naturale de ordinul 2m−1 si L(f) =∑n
i=1 xif(xi) o alta functionala de aproximare la care impunem numai sa fieexacta pentru polinoamele de grad cel mult m − 1. Punem E = F − L siE = F − L. Din teorema lui Peano avem
E(f) =∫ b
aK(t)f (m)(t)dt si E(f) =
∫ b
aK(t)f (m)(t)dt
iar
L(f)− L(f) =n∑
i=1
µif(xi) = E(f)−E(f) =∫ b
aϕ(t)f (m)(t)dt
cu µi = ci − ci, i ∈ 1, · · · , n si
ϕ(t) = K(t)−K(t) =n∑
i=1
µ(xi − t)m−1
(m− 1)!.
Cum (xi− t)m−1+ = (−1)m−1[(t−xi)m−1− (t−xi)m−1
+ ] iar µ1, · · · , µn verificarelatiile
∑ni=1 µix
ki = 0, cınd k ∈ 0, 1, · · · ,m− 1 avem
ϕ(t) = (−1)mn∑
i=1
µi(t− xi)m−1
+
(m− 1)!
si elementul
s(t) = (−1)mn∑
i=1
µi(t− xi)2m−1
+
(2m− 1)!
apartie spatiului SN 2m−1(∆n). In plus s(m)(t) = ϕ(t).
Cum functionala L aproximeaza exact elementele din SN 2m−1(∆n),deducem
E(s) =∫ b
aK(t)s(m)(t)dt =
∫ b
aK(t)(K(t)−K(t))dt = 0.
Avem, prin urmare,
b∫
a
K(t)2dt =b∫
a
K(t)2dt +b∫
a
(K(t)− K(t))2dt + 2b∫
a
K(t)(K(t)− K(t))dt.

§11. Formule de cuadratura optimale 197
Cum ultima integrala este nula, obtinem∫ b
aK(t)2dt ≥
∫ b
aK(t)2dt
egalitatea avınd loc daca K(t) = K(t) pentru orice t ∈ [a, b], adica dacasi numai daca ci = ci ∀ i ∈ 1, · · · , n, ceea ce demonstreaza unicitateafunctionalei aproximante optimale ın sens Sard.
11.2 Optimalitate ın sens Golomb - Weinberger
Presupunem a avea informatii despre functia f ∈ Hm(a, b);
f(xi) = yi i = 1, · · · , n.
In plus, presupunem ca f este suficient de neteda, ın sensul ca∫ b
a[f (m)(x)]2dx ≤ δ2
unde δ este o constanta. Notam
Ωδ =f ∈ Hm(a, b); f(xi) = yi, i ∈ 1, · · · ,m si
∫ b
a(fm(x))2dx ≤ δ2
.
Observam ca Ωδ este o multime convexa ınchisa din Hm(a, b). Daca pre-supunem n ≥ m aceasta multime este marginita.
Presupunem ca dorim sa calculam
F (f) =∫ b
af(t)dt
pentru o functie f ∈ Ωδ. Cınd f parcurge Ωδ, F (f) parcurge un convex pedreapta numerica, adica un interval marginit (α, β). Cea mai buna valoareaproximativa pe care o putem da pentru F (f) (pentru orice f ce apartineΩδ este mijlocul m = (α + β)/2 a intervalului (α, β). 2
Teorema urmatoare arata ca aceasta corespunde aceleiasi valori aproximativedin cazul precedent.
Teorema 11.2 Mijlocul m al intervalului (α, β) = F (Ωδ) este egal (pentruorice δ astfel ca Ωδ 6= ∅ ) cu F (δ) unde σ este unica functie spline naturalade gradul 2m− 1 care verifica σ(xi) = yi, i ∈ 1, · · · , n. Avem deci
m = F (σ) =n∑
i=1
ciri

198 Capitolul 4. Integrarea si derivarea numerica
unde ci sınt coeficientii functionalei aproximante optimale ın sensul lui Sard.
Demonstratie. Aratam ca Ωδ este un convex din Hm(a, b) care admiteσ ∈ SN 2m−1(∆n) ca centru de simetrie, adica σ+g ∈ Ωδ implica σ−g ∈ Ωδ.Daca avem σ + g ∈ Ωδ, atunci
σ(xi) + g(xi) = yi i ∈ 1, · · · , n si∫ b
a(σ(m)(x) + gm(x))2dx ≤ δ2.
Cum σ(xi) = yi functia g verifica g(xi) = 0, i ∈ 1, · · · , n. Cum∫ b
aσ(m)(x)g(m)(x)dx = (−1)m
n∑
i=1
(σ2m−1(xi+)− s(2m−1)(xi−))g(xi) = 0,
deducem
b∫
a
(σm(x) + g(m)(x))2dx =b∫
a
(σ(m)(x)− g(m)(x))2dx =
b∫
a
(σ(m)(x))2dx +b∫
a
(g(m)(x))2dx.
Functia g verifica σ(xi)−g(xi) = yi, 1 ≤ i ≤ n si∫ b
a(σ(m)(x)−g(m)(x))2dx ≤
δ2 deci σ−g ∈ Ωδ. Intervalul F (Ωδ) este un convex ın R centrat ın F (σ) deciF (σ) este mijlocul intervalului (α, β). Scriind σ sub forma σ =
∑ni=1 riσi
obtinem
F (σ) =n∑
i=1
ciF (σi) =n∑
i=1
ciyi
cu ci = F (σi), i ∈ 1, · · · , n. 2
Schema generala
Consideratiile facute mai sus pot fi transpuse ın urmatoarea schema.
Fie E1 si E2 doua spatii Banach si T un operator linear continuu din E1 peE2. Presupunem ca vrem sa evaluam o functionala F liniara continua peE1 cu ajutorul unei combinatii lineare, L, de n functionale lineare continueλ1, . . . λn, liniar independente pe E1, L =
∑ni=1 ciλi. Fie E = F −L. Alegem
pentru ınceput c1, · · · , cn astfel ca
E(x) = 0, pentru x ∈ Ker(T ). (11.3)

§11. Formule de cuadratura optimale 199
Putem exprima eroarea E ın felul urmator
E(x) = v(T (x)), ∀ x ∈ E1
unde v : E2 → R este o functionala liniara si continua pe E2 ( vezi Teorema14.9 din anexa ). In plus, avem v = (T )−1 u. In general, conditia (11.3) nudetermina ın mod unic coeficienii c1, . . . , cn.
Functionala v depinde evident de coeficientii c1, . . . , cn. Este natural sacautam, printre c1, . . . , cn ce verifica (11.3) pe cei care minimizeaza, ‖v‖,norma functionalei v. Avem de fapt,
‖E(x)‖ ≤ ‖v‖ · ‖T (x)‖, ∀ x ∈ E1.
Daca consideram multimea x ∈ E, pentru care ‖T (x)‖ ≤ r, avem majorareaerorii E data de ‖E(x)‖ ≤ ‖v‖r.Spunem ca functionala aproximanta L este optimala ın sens lui Sarddaca urmatoarele conditii sınt verificate pentru E = F −∑
ciλi
a) E ∈ Ker(T )0 = l ∈ E′1, l(x) = 0 ∀ x ∈ Ker(T )
b) ‖(T ′)−1(u)‖ este minima ( unde T ′ este transpusul operatorului T ).
Exemplul 11.1 Fie E1 = C1([0, 1], E2 = C([0, 1]) si T : E1 → E2 definitprin (T (x))(ξ) = x′(ξ) ∀ ξ ∈ [0, 1]. Dorim sa calculam functionala
F (f) =∫ 1
0f(t)dt
cu ajutorul functionalei aproximante
L(f) =3∑
i=1
cif(xi)
cu x1 = 0, x2 = 1/2, x3 = 1. Presupunem E = F − L.
Functionalele λi sınt aici de forma λi(f) = f(xi) si Ker(T ) = functiile constante .Pentru ca sa avem E(f) = 0 pentru f ∈ Ker(T ) este suficient sa avem
c1 + c2 + c3 = 1.

200 Capitolul 4. Integrarea si derivarea numerica
Un calcul elementar arata ca avem
E(f) =∫ 1
0ψ(t)f ′(t)dt
cu
ψ(t) =
c1 − t pentru t ∈ [0, 1/2]
1− t− c3 pentru t ∈ [1/2, 1]
Functionala v este definita aici prin v : g ∈ C0([0, 1]) −→∫ 1
0ψ(t)g(t)dt.
Cum usor se poate verifica
‖v‖E∗2 =∫ 1
0|ψ(t)|dt.
Un calcul direct arata ca minimul normei ‖v‖ este atins cınd c1 = 1/4,c2 = 1/2 si c3 = 1/4.
11.3 Formule optimale pe spatii abstracte
Presupunem ca pentru evaluarea functionalei liniare continue h ın x ∈ E1
folosim informatiilea(x) = z
unde a este un operator liniar continuu din E1 pe spatiu Banach Z.
Vrem sa aproximam h prin k liniar ın raport cu aceste informatii. Luamdeci o functionala aproximanta k de forma
k(x) = c(a(x)), ∀ x ∈ E,
unde c este o functionala liniara continua pe Z.
Din ecuatia precedenta, utilizınd definitia transpusului operatorului a avem
k = a′ c, cu c ∈ Z ′.
(cınd Z = Rn si a(x) = [λ1(x), ·, λn(x)] ∈ Rn, avem k = a′(c) =∑
ciλi dacac = (c1, . . . , cn) ∈ Rn gasim formularea precedenta).
Ca si mai sus, alegem c astfel ca h(x) − k(x) = 0 pentru x ∈ Ker(T )adica e = h − a′ c ∈ N(T )0. Exista deci v ∈ E′
2 asa ıncıt v = (T ′)−1 e

§11. Formule de cuadratura optimale 201
adica e(x) = v(T (x)), pentru orice x ∈ E1. Spunem din nou ca functionalak = a′ c este optimala daca avem
‖(T ′)−1(a′(c)− h)‖ ≤ ‖(T ′)−1(a′ c− h)‖
pentru orice c ∈ Z astfel ca a′(c)− h ∈ Ker(T )0.
In cazul cınd spatiile E1 si E2 sınt spatii Banach, determinarea functiilorc ∈ Z ′ pentru care functionala aproximanta a′ c este optimala nu este ooperatie usoara. Dar, daca spatiile E1 si E2 sınt spatii Hilbert calculele sıntmai usoare.
Functionale de aproximare exacte prin functii spline
Fie X, Y si Z trei spatii Hilbert. Notam prin t si a doi operatori liniaricontinui din X pe Y si respectiv pe Z. Daca
Ker(t) + Ker(a) este ınchis ın X si Ker(t) ∩Ker(a) = 0
atunci pentru orice z ∈ Z exista si este unic un s ∈ X astfel ca
‖t(s)‖Y = minx∈Iz
‖t(x)‖Y ,
unde Iz = x ∈ X; a(x) = z. Multimea
S = s ∈ X; 〈t(s), t(x)〉 = 0 ∀ x ∈ Ker(a)
formeaza spatiul functiilor spline de interpolare ( relative la t si a ).
Presupunem ca dorim sa calculam functionala
x ∈ X → 〈h, x〉Xreprezentata prin elementul h ∈ X. Luam o functionala aproximanta deforma
x ∈ X → 〈k, x〉Xcu k = a∗(c), unde c ∈ Z si a∗ este adjunctul operatorului a. Teoremaurmatoare arata ca putem alege elementul c ∈ Z astfel ca eroarea
〈e, s〉X = 〈h− k, s〉Xsa fie nula cınd s apartine lui S.

202 Capitolul 4. Integrarea si derivarea numerica
Teorema 11.3 Exista c ∈ Z unic astfel ca pentru k = a∗(c), avem
〈h− k, s〉 = 0, pentru orice s ∈ S.
In plus, c = γ∗(h) = h(γ) unde γ : Z → S este operatorul care asociaza luiz ∈ Z functia spline de interpolare din S relativa la t, a si z.
Demonstratie. Fie γ : Z → S operatorul care asociaza unui element z ∈ Zfunctia spline de interpolare relativa la t, a si z. Trebuie sa avem
〈k, s〉 = 〈h, s〉 ∀ s ∈ S
sau echivalent〈k, γ(z)〉X = 〈h, γ(z)〉 ∀ z ∈ Z.
Cum k = a∗(c), utilizınd definitia aplicatiei adjuncte, avem
〈a∗(c), γ(z)〉X = 〈c, a(γ(z))〉Z = 〈h, γ(z)〉X = 〈γ∗(h), z〉Zpentru orice z ∈ Z. Cum a(γ(z)) = z, obtinem ın final
〈c, z〉Z = 〈γ∗(h), z〉Z , ∀ z ∈ Z
adica c = γ∗(h) sau ınca c = hγ. 2
Functionale de aproximare optimale si functiile spline
Cum ker(t) ⊂ S, functionala aproximativa k = a∗(c) este a fortiori exactapentru elementele lui Ker(t). Vom arata ca k este unica functionala deaproximare optimala.
Teorema 11.4 Exista o functionala aproximanta k = a∗(c) optimala ınsensul lui Sard. Ea este identica cu functionala aproximanta exacta pentrufunctiile spline, adica c = γ∗(h).
Demonstratie. Consideram eroarea e = h − k cu k = a∗(c). Elementul eparcurge (R(a∗)− h) ∩Ker(a)⊥ care este un translatat al spatiului
R(a∗) ∩Ker(t)⊥ = R(a∗) ∩R(t∗) = H.
Deducem ca (t∗)−1(e) parcurge un translatat al spatiului (t∗)−1(H) = F =t(S). Cum F este ınchis, exista un element unic (t∗)−1(e) de norma minimacare este caracterizat prin
e = a∗(c)− h 〈(t∗)−1(e), f〉Y = 0 pentru orice f ∈ F.

§11. Formule de cuadratura optimale 203
Relatia de ortogonalitate se poate, ınca, scrie
〈(t∗)−1(e), t(s)〉Y = 0, ∀ s ∈ S
sau ınca < e, s >X= 0 ∀ s ∈ S. Aceasta semnifica faptul ca eroareae = a∗(c) − h este nula pentru s ∈ S. Deducem din teoreme anterioara cak = a(c) este unica functionala aproximanta care este exacta pe spatiul S alfunctiilor spline. 2
• Cınd Z = Rn, operatorul a : X → R poate fi pus sub forma
a(x) = [〈k1, x〉, . . . , 〈kn, x〉] ∈ Rn
Spatiul S al functiilor spline este atunci de dimensiune n. Putem construio baza ın felul urmator. Fie σi ∈ S astfel ca 〈kj , σi〉X = δij . Functia splineσ ∈ S astfel ca a(x) = z adica < ki, x >= zi i ∈ 1, · · · , n se scrie atunci
σ =n∑
i=1
ziσi.
Coeficientii ci ai aproximarii optimale k =∑n
i=1 ciki sınt egali cuci = 〈h, σi〉X .
Functionale aproximante optimale ın sens Golomb–Weinberger
Presupunem ca dorim sa calculam valoarea unei functionale liniare continuepe X ( reprezentata prin h ∈ X ) ıntr-un punct x ∈ X care nu este cunoscutexact. Presupunem ca urmatoarele informatii asupra lui x sınt cunoscute
a(x) = z si ‖t(x)‖ ≤ δ
unde z ∈ Z este dat iar δ este o constanta. Consideram
Ωδ = x ∈ X ; a(x) = z si ‖t(x)‖ ≤ δ.
Presupunem ca δ este ales astfel ca Ωδ 6= ∅. Se vede usor ca Ωδ este unconvex ınchis din X. Aplicatia
x → |x| = (‖t(x)‖2Y + ‖a(x)‖2
Z)1/2
este o noua echivalenta pe X cu norma initiala. Este clar ca Ωδ este marginitın sensul acestei norme, deci este la fel marginit ın sensul normei din X.

204 Capitolul 4. Integrarea si derivarea numerica
Dorim sa calculam 〈h, x〉X pentru x ∈ Ωδ, Cınd x parcurge multimea convexamarginita Ωδ, 〈h, x〉X parcurge un convex marginit din R, adica un intervalconvex marginit din R, deci un interval marginit (α, β). Cea mai bunavaloare aproximativa care poate fi data pentru 〈h, x〉 este mijlocul m =(α + β)/2 al acestui interval.
Teorema urmatoare arata ca aceasta alegere corespunde aproximarii opti-male ce a fost studiata mai sus.
Teorema 11.5 Mijlocul m al intervalului (α, β) =< h,Ωδ >X este egal(pentru orice δ, pentru care Ωδ 6= ∅) cu < h, σ >X unde σ ∈ S este functiaspline de interpolare relativa la t, a si z. Avem deci
m =< c, z >Z
unde c ∈ Z este astfel ca k = a∗(c) sa fie functionala aproximanta optionalaın sens Sard.
Demonstratie. Aratam ca multimea convexa Ωδ admite σ ca centru desimetrie, adica σ + x ∈ Ωδ implica σ − x ∈ Ωδ. Daca avem σ + x ∈ Ωδ,atunci a(σ + x) = z si ‖t(σ + x)‖2
Y ≤ δ2. Cum a(σ) = z avem a(x) = 0,adica x ∈ Ker(a), Avem 〈t(σ), t(x)〉Y = 0. Am dedus ca ‖t(σ − x)‖2
Y =‖t(σ + x)‖2
Y ≤ δ2. Cum a(σ − x) = z, rezulta σ − x ∈ Ωδ.
Multimea 〈h, Ωδ〉 este un convex pe R centrat ın 〈h, σ〉X , deci 〈h, σ〉X estemijlocul m al intervalului (α, β). 2
12 Convergenta formulelor de cuadratura
Pentru functionala liniara si continua F : X−→R consideram o familie deaproximante de forma
n∑
i=1
c(n)i λ
(n)i
unde λ(n)i sınt functionale liniare si continue pe X. Vom demonstra ca, ın
general, sirul (∑n
i=1 c(n)i λ
(n)i )n nu converge ın norma catre F , dar converge
punctual, daca coeficientii (c(n)1 , . . . , c
(n)n )n satisfac o anumita conditie de
marginire.

§12. Convergenta formulelor de cuadratura 205
12.1 Imposibilitatea convergentei tari
Cum |F (f)−∑ni=1 c
(n)i λi(f)| ≤ ‖F−∑n
i=1 c(n)i λ
(n)i ‖·‖f‖ ın studiul convergentei
o idee ar fi sa se studieze convergenta tare a sirului∑
c(n)i λ
(n)i )n catre F . Un
exemplu simplu arata ca pe aceasta cale nu avem sansa de izbında.
Propozitia 12.1 Fie X = C([a, b], F : X → R si λ1, . . . , λn : X → R
definite prin F (f) =∫ b
af(x)dx respectiv λi(f) = f(xi) unde x1, . . . , xn sınt
puncte distincte din [a, b]. Atunci :
1) ‖F‖ = b− a.
2) ‖∑ni=1 ciλi‖ =
∑ni=1 |ci|.
3) ‖F −∑ni=1 ciλi‖ = b− a +
∑ni=1 |ci|.
Demonstratie. 1)
|F (f)| = |∫ b
af(x)dx| ≤
∫ b
a|f(x)|dx ≤ (b− a) sup
x∈[a,b]|f(x)| = (b− a)‖f‖
deci ‖F‖ ≤ b− a. Fie f ≡ 1 avem F (f) = b− a, ‖f‖ = 1, deci
b− a = F (f) = |F (f)| ≤ ‖F‖ · ‖f‖ = ‖F‖de unde b− a ≤ ‖F‖. Avem prin urmare ‖F‖ = b− a.2)
|n∑
i=1
ciλi(f)| = |n∑
i=1
cif(xi)| ≤n∑
i=1
|ci| · |f(xi)| ≤ ‖f‖ ·n∑
i=1
|ci|
deci
‖n∑
i=1
ciλi‖ ≤n∑
i=1
|ci|.
Fie acum f o functie continua pe [a, b] definita astfel:
f(xi) = sgncisi liniara pe [xi, xi+1], constanta pe [a, x1] si [xn, b] (am presupus implicit caa ≤ x1 < x2 < · · · < xn ≤ b ). Avem
n∑
i=1
ciλi(f) =n∑
i=1
cif(xi) =n∑
i=1
cisgn(ci) =n∑
i=1
|ci|

206 Capitolul 4. Integrarea si derivarea numerica
si ‖f‖ = 1, deci
n∑
i=1
|ci| =n∑
i=1
ciλi(f) ≤ ‖n∑
i=1
ciλi‖ · ‖f‖ = ‖n∑
i=1
ciλi‖.
Am obtinut astfel ca
‖n∑
i=1
ciλi‖ =n∑
i=1
|ci|.
3) ‖F −∑ni=1 ciλi‖ ≤ ‖F‖+ ‖∑n
i=1 ciλi‖ = (b− a) +∑n
i=1 ‖ci‖.Fie a ≤ x1 < x2 < · · · < xn ≤ b si fie 2/m < min(xi+1 − xi) si f o functiecontinua pe [a, b] definita prin
f(xi) = −sgn(ci); f(xi ± 1/m) = 1;
ın intervalele [xi − 1/m], [xi, xi + 1/m], [xi + 1/m, xi+1 − 1/m] este liniara( pe [xi + 1/m, xi+1 − 1/m] este deci constanta ≡ 1);
pe intervalele [a1, x1 − 1/m], [xn + 1/m, b] (daca au sens ) este egala cu 1.
Avem ‖f‖ = 1, F (f) ≥ b− a− 2n/m,
n∑
i=1
ciλi(f) =n∑
i=1
cif(xi) =n∑
i=1
−|ci| = −n∑
i=1
|ci|,
deci
(F −n∑
i=1
ciλi)(f) ≥ b− a +n∑
i=1
|ci| − 2n
m
care ımpreuna cu ‖f‖ = 1 ne da
‖F −n∑
i=1
ciλi‖ ≥ b− a +n∑
i=1
|ci| − 2n
m.
Daca facem m →∞ obtinem
‖F −n∑
i=1
ciλi‖ ≥ b− a +n∑
i=1
|ci|
de unde
‖F −n∑
i=1
ciλi‖ = b− a +n∑
i=1
|ci|.

§12. Convergenta formulelor de cuadratura 207
2
Din cele de mai sus rezulta ca daca (λ(n)1 , . . . , λ
(n)n )n∈N este un sistem de
functionale lineare continue pe C([a, b]), nu putem sa avem
‖F −n∑
i=1
c(i)i λ
(n)i ‖ → 0.
Ramıne sa consideram convergenta punctuala (∗-slaba ) pe X ′.
12.2 Convergenta punctuala
Reamintim ca, un sir (kn) ⊂ X ′ converge ∗-slab sau punctual la k ∈ X ′ dacakn(x) → k(x) pentru orice x ∈ X. Urmatorul criteriu de convergenta punc-tuala este des utilizat pentru studiul convergentei metodelor de aproximare.
Teorema 12.1 Sirul (kn) ⊂ X ′ converge ∗-slab (punctual ) la k ∈ X ′ dacasi numai daca
1) exista M > 0 astfel ca ‖kn‖X′ < M < +∞ ∀ n ∈ N
2) kn(x) → k(x) ∀ x ∈ V , unde V este o multime densa ın X.
Pentru demonstratie vezi anexa.
Teorema 12.2 Fie X = C([a, b]) si pentru fiecare n ∈ N fie x(n)1 . . . , x
(n)n
puncte distincte din [a, b] si kn : X → R definit prin
kn(f) =n∑
i=1
c(n)i f(xi).
Sirul (kn(f))n∈N converge la F (f) =∫ b
af(x)dx daca si numai daca
1) Exista m > 0 astfel ca∑n
i=1 |c(n)i | ≤ m ∀ n ∈ N
2) kn(f) → F (f) pentru orice f ∈ P unde P este multimea polinoamelorcu coeficienti reali.

208 Capitolul 4. Integrarea si derivarea numerica
Demonstratie. Folosind Propozitia 12.1, avem
‖kn‖ =n∑
i=1
|c(n)i |, ∀ n ∈ N (12.1)
Daca kn(f) → F (f) pentru orice f ∈ C([a, b]) atunci , utilizınd Teorema12.1, exista m > 0 astfel ‖kn‖ ≤ m ∀ n ∈ N , deci
∑ni=1 |c(n)
i | ≤ m∀ n ∈ N . In plus, evident, kn(f) → F (f) pentru f ∈ P ⊂ X.
Reciproc, daca 1) si 2) sınt satisfacute, cum P este dens ın X si (12.1) areloc, din Teorema 12.1, obtinem kn(f) → F (f) pentru orice f ∈ X.
Suficienta conditiilor 1) si 2) a fost demonstrata de Steklov ın 1916, iarnecesitatea de Polya ın 1933, fara a folosi teorema Banach – Steinhauss.
• Daca x(n)1 , . . . , x
(n)n sınt puncte distincte din [a, b] ın §9 s-au considerat
formule de cuadratura de forma
Ln(f) =n∑
i=1
c(n)i f(xn
i )
unde
c(n)i =
∫ b
ali,ndx
iar
li,n(x) =∏
j 6=i
(x− x(n)j )
(x(n)i − x
(n)j )
Kuzmin ın 1931 a demonstrat ca daca nodurile x(n)i sınt echidistante, adica
x(n)i = a +
b− a
n− 1(i− 1), i = 1, . . . , n
atunci sirul∑n
i=1 |c(n)i |)n∈N nu este marginit deci exista f ∈ C([a, b)] astfel
ca (Ln(f) nu converge la∫ b
af(x)dx.
• Daca nodurile sınt de forma
x(n)k =
a + b
2+
b− a
2cos
(2k + 12n + 2
π), k ∈ 0, 1, . . . , n
Fejer a demonstrat ın 1904 ca c(n)k > 0 si
∑ni=1 c
(n)k = 2 deci metoda de
cuadratura (Gauus - Cebısev ) este convergenta.

§12. Convergenta formulelor de cuadratura 209
• Pentru formulele de cuadratura de tip Gauus obtinem c(n)i > 0 si
n∑
i=1
c(n)i =
∫ b
aw(x)dx < ∞
deci si aceste formule de cuadratura sınt convergente. 2
12.3 Convergenta formulelor de cuadratura compuse
Teorema urmatoare demonstreaza convergenta formulelor de cuadraturacompuse.
Teorema 12.3 Presupunem ca formula de cuadratura elementara (9.11)este fixata, ca τj ∈ [−1, 1] pentru j ∈ 0, 1, . . . , k. Pentru orice functieintegrabila Riemann pe [α, β] avem ca
Tkl(f) =k∑
i=1
(hi
l∑
j=0
ωjf(αij))
(12.2)
undeαij =
αi + αi+1
2+ τj
(αi+1 − αi
2
tinde la∫ β
αf(x)d(x) cınd diametrul δk = max0≤i≤k−1(αi+1 − αi) al diviziu-
nii, α0, · · · , αk, intervalului [α, β], tinde la zero.
Demonstratie. Din (12.2 ) avem
Tkl(f) =k∑
j=0
ωjIij(f)
cu
Ijk(f) =k−1∑
i=0
(αi+1 − αi)f(αij).
Cum αij ∈ [αi, αi+1], rezulta ca Iik(f) este o suma Riemann pentru f pe(α, β) deci
limδk→0
Ijk(f) =∫ β
αf(x)dx.
Pe de alta parte∑l
j=0 ωj = 1 si obtinem ca
Tkl(f) →∫ β
αf(x)dx cınd δk → 0.
2

210 Capitolul 4. Integrarea si derivarea numerica
13 Formule de cubatura
Se ıntelege prin formula de cubatura o formula de aproximare numericaa unei integrale multiple. Principial, o formula de cubatura se obtine la felca o formula de cuadratura. Se aproximeaza una dintre functionalele
F (f) =∫
Dw(x)f(x)dx, F (f) =
∫
∂Ωf(x)ds(x)
printr-o functionala de forma
L(f) =N∑
i=1
ciλi(f)
unde λi sınt functionale liniare. De exemplu, daca X1, . . . , XN sınt punctedin Rn iar λi sınt functionale liniare de forma λi(f) = f(Xi) atunci se obtineo formula de cubatura de forma
F (f) =∫
Dw(x)f(x)dx ≈
N∑
i=1
cif(Xi) = L(f) (13.1)
13.1 Constructia formulelor de cubatura
Pentru obtinerea formulelor de cubatura (13.1) se procedeaza analog capentru cele de cuadratura. Un prim procedeu ar consta ın aproximareafunctiei de integrat printr-o functie mai simpla (de exemplu printr-un poli-nom ) si apoi se determina constantele ci astfel ca formula (13.1) sa fieexacta pentru functia cu care am aproximat. Un alt procedeu consta ındescompunerea domeniului de integrare ın domenii particulare (mai mici ),se aproximeaza pe fiecare domeniu functia f printr-un polinom, se scrie o for-mula deaproximare pentru polinomul respectiv, iar ın final se aduna rezultateleobtinute. Totusi, apar cıteva deosebiri fata de deducerea formulelor decuadratura.
• Un spatiu cu o dimensiune este mult mai simplu decıt un spatiu cumai multe dimensiuni. Deoarece toate intervalele sınt afin echivalente,exista esentialmente un singur domeniu marginit conex ın R. Pentruun spatiu cu mai multe dimensiuni exista potential un numar infinitde tipuri de domenii ce intra ın discutie. In R2, de exemplu, patratul,cercul, triunghiul sınt trei domenii care nu sınt afin echivalente.

§13. Formule de cubatura 211
• Formulele de cuadratura sınt strıns legate de teoria polinoamelorortogonale. In mai multe dimensiuni teoria polinoamelor ortogonaleeste mult mai complicata si mai putin studiata.
Multe probleme privind existenta si constructia formulelor de cubatura pen-tru un domeniu dat si o functie pondere data sınt ınca nerezolvate. Douatehnici s-au impus ın deducerea formulelor de cubatura si anume metodaformulelor produs si metoda formulelor nonprodus.
Formule produs
Pe scurt, metoda de constructie a formulelor produs este metoda separariivariabilelor. Se considera integrala
∫
Dn
w(x)xαdx =∫
Dn
w(x1, . . . xn)xα11 . . . xαn
n dx1 . . . dxn (13.2)
Daca putem gasi o transformare ( ın general neliniara ) de coordonate
x1 = x1(u1, . . . , un)...xn = xn(u1, . . . , un)
care transforma (13.2) ıntr-un produs de integrale∫
w1(u1)g(u1)du1 · · ·∫
wn(un)g(un)dun
si anume formule de cuadratura sınt date pentru integrale unidimensionale,atunci putem combina aceste formule pentru a obtine o formula pentru dome-niul Dn.
Pentru domenii particulare precum; n-cubul, n-sfera, n-simplexul putemconstrui formule produs din n formule unidimensionale fiecare folosind, sazicem, M puncte si avınd gradul d. Formula produs va avea Mn puncte siva fi de gradul d. Daca integrantul este cunoscut numai pe o retea de punteuniforma trebuie sa folosim produse de formule obtinute utilizınd aproxi-marea cu functii polinomiale pe portiuni. Daca integrantul este cunoscut ıntot domeniul este avantajos de utilizat formule de tip Gauss unidimensionalecare pentru M puncte au gradul 2M − 1.

212 Capitolul 4. Integrarea si derivarea numerica
Proprietatea nedorita (indezirabila ) a formulelor produs este ca numarul depuncte creste rapid cu n. Pentru n mic formulele produs sınt des utilizate.
Vom prezenta ın continuare deducerea cıtorva formule produs pentru uneledomenii particulare.
Cubul n-dimensional
Fie n = 2 si fie C2 = (x, y),−1 ≤ x ≤ 1, −1 ≤ y ≤ 1. Presupunem caavem o formula unidimensionala
∫ 1
−1g(t)dt '
M∑
i=1
Aig(µi)
care are gradul d. Atunci formula
∫ 1
−1
∫ 1
−1f(x, y)dxdy '
M∑
i=1
M∑
j=1
AiAjf(µi, µi)
are gradul d.
Formula de mai sus se poate scrie sub forma
∫
C2
f(x, y)dxdy 'M∑
i,j=1
cijf(Xij) (13.3)
unde cij = AiAj iar Xi = (µi, µj).
Rezultatul de mai sus poate fi generalizat astfel:Presupunem Dn, Dp, Dq domenii din Rn, Rp, Rq unde n = p + q si
Dn = (x1, . . . xn) ∈ Rn; (x1, . . . , xp) ∈ Dp, (xp+1, . . . , xn) ∈ Dq.
Sa presupunem ca
w(x1, . . . , xn) = wp(x1, . . . , xp) · wq(xp+1, . . . , xn) (13.4)
si ca avem urmatoarea formula de integrare pentru Dp si Dq
∫
Dp
wp(x1, . . . , xp)g(x1, · · · , xp)dx1 . . . dxp 'Np∑
i=1
Bp,ig(λi,1, . . . , λi,p) (13.5)

§13. Formule de cubatura 213
de grad dp si
∫
Dq
wq(xp+1, . . . , xn)h(xp+1, . . . , xn)dxp+1 . . . dxn 'Nq∑
j=1
Bq,jh(µj,p+1, . . . , µj,n)
(13.6)de grad dq. Avem urmatorul rezultat.
Teorema 13.1 Formula de cubatura
∫
Dn
w(x)f(x)dx 'Np∑
i=1
Nq∑
j=1
cijf(Xij) (13.7)
unde cij = Bp,i · · ·Bqj si Xij = (λi,1, . . . , λi,p, µj,p+1, . . . , µj,n) pentru i =1, . . . , Np, si j = 1, . . . , Nq este o formula de cubatura cu N = Np · Nq
puncte si de grad d = min(dp, dq).
Demonstratie. Cum∫
Dn
w(x)xαdx =
∫
Dp
wp(x1, . . . , xp)xα11 . . . xαp
p ×∫
Dq
wq(xp+1, . . . , xn)xαp+1
p+1 . . . xαnn dxp+1 . . . dxn
folosind formulele (13.5) si (13.6) obtinem formula (13.7). 2
Simplexul n-dimensional
Fie simplexul Tn generat de vırfurile
(1, 0, . . . , 0, 0), (0, 1, . . . , 0, 0), . . . (0, 0, . . . , 0, 1), (0, . . . , 0).
T2 este un triunghi, T3 este un tetraedru. Cum pentru orice n-simplex Tgenerat de punctele a1, . . . , an+1, nesituate ın acelasi hiperplan, exista otransformare afina
x = α0 + αu
nesingulara ce transforma Tn pe T , este suficient sa considream formule deaproximare pe Tn.
Integrala monomului xα pe Tn este data de∫ 1
0
∫ 1−x1
0· · ·
∫ 1−x1−···−xn1
0xα1
1 . . . xαnn dxn . . . dx1 (13.8)

214 Capitolul 4. Integrarea si derivarea numerica
Sa transformam integrala (13.8) folosind transformatea de coordonate
x1 = y1 = y1
x2 = y2(1− y1) = y2(1− x1)...xn = yn(1− yn−1) . . . (1− y1) = yn(1− x1 − · · · − xn−1)
(13.9)
Deoarece limitele de integrare pentru xi sınt
0 ≤ xi ≤ 1− x1 − · · · − xn−i−1, i = 1, . . . , n
limitele de integrare pentru yi vor fi
0 ≤ yi ≤ 1, i = 1, · · · , n.
Cum jacobianul transformarii (13.9) este
J = (1− yi)n−1(1− y2)n−2 · · · (1− yn−1)
integrala (13.8) devine∫ 1
0. . .
∫ 1
0(1− y1)β1 · · · (1− yn−1)βn−1yα1
1 · · · yαnn dy1 · · · dyn (13.10)
undeβ1 = α2 + . . . + αn + n− 1β2 = α3 + . . . + αn + n− 2...βn−1 = αn−1
Integrala (13.10) este un produs de n integrale unidimensionale, unde inte-grantul ın raport cu yk are forma
∫ 1
0(1− yk)n−kPk(yk)dyk, k = 1, . . . , n
undePk(yk) = yαk
k (1− yk)αk+1+···+αn
este un polinom de gradul αk + . . . + αn ın yk.
Prin urmare, daca avem n formule ıntr-o variabila, fiecare de gradul d deforma ∫ 1
0(1− yk)n−kf(yk)dyk '
M∑
i=1
Ak,if(µk,i) (13.11)
pentru k = 1, . . . , n, acestea pot fi combinate pentru a obtine o formula degradul d pentru Tn. Putem strınge aceste rezultate astfel:

§13. Formule de cubatura 215
Teorema 13.2 Daca fiecare din cele n formule (13.11) are gradul d, atunciformula ∫
Tn
f(x)dx '∑
|(i1,...,in)|≤d
cif(xi) (13.12)
unde i = (i1, . . . , in), 1 ≤ ik ≤ M , k = 1, . . . n, ci = A1,i1 ·A2,i2 · · ·An,inXi = (νi1 , νi1i2 , · · · νi1i2...in) cu
νi1 = µ1,i1νi1i2 = µ2,i2(1− µ1,i1)...νi1...in = µn,in(1− µn−1,in−1 . . . (1− µ1,i1)
are gradul d.
Formula (13.12) este produsul conic al formulelor unidimensionale (13.11).Teorema 13.2 poate fi generalizata pentru a da formule de integrare pentruTn cu o functie pondere w de forma
xβ11 · · ·xβn
n (1− x1)ε1 · · · (1− x1 · · ·xn)εn .
Formula produs este asemanatoare cu formula (13.12) cu exceptia faptuluica ın formula (13.11) trebuie sa folosim formula
∫ 1
0(1− yk)βkyγk
k h(yk)dyk 'M∑
i=1
Ak,ih(µk,i), k = 1, · · · , n (13.13)
unde βk, γk, δk, εk sınt legate prin relatiile
−1 < γk = δk, k = 1, . . . , n−1 < β1 = δ2 + · · ·+ δn + ε1 + · · ·+ εn + n− 1−1 < β2 = δ2 + · · ·+ δn + ε2 + · · ·+ εn + n− 2
...−1 < βn−1 = δn + εn−1 + εn + 1−1 < βn = εn
Conurile n-dimensionale
Fie Dn−1 un domeniu (n−1)-dimensional ın Rn−1 cu variabilele u1, · · · , un−1,iar Dn definit prin
Dn = (x1, . . . , xn; xi = ui(1− λ), i = 1, . . . , n− 1, xn = λ, 0 ≤ λ ≤ 1,
(u1, . . . , un−1) ∈ Dn−1.

216 Capitolul 4. Integrarea si derivarea numerica
Multimea Dn este un con cu baza Dn−1 si vırful (0, . . . , 0, 1).
Fie Dn−1(λ), 0 ≤ λ ≤ 1, intersectia domeniului Dn cu hiperplanul xn =λ. O integrala pe Dn−1(λ) poate fi evaluata printr-o transformare afina adomeniului Dn−1(λ) pe domeniul Dn−1. Folosind acest fapt avem:
∫
Dn
xα11 · · ·xαn
n dx1 · · · dxn =1∫
0
xαnn
( ∫
Dn−1(xn)
xα11 · · ·xαn−1
n−1 dx1 · · · dxn−1)dxn
=∫ 1
0xαn
n
∫
Dn−1
(1− xn)n−1n−1∏
j=1
[xj(1− xn)]αjdx1 · · · dxn−1
dxn =
=∫ 1
0(1− xn)n−1+βxαn
n dxn ·∫
Dn−1
xα11 · · ·xαn−1
n−1 dx1 . . . dxn−1
(13.14)cu β = α1 + · · ·+ αn−1.
In ultima expresie, integrala ın raport cu xn are forma∫ 1
0(1− xn)n−1Pα(xn)dxn
unde Pα(xn) este un polinom de gradul α1 + · · ·+ αn.
Teorema 13.3 Daca avem data o formula de integrare de ordinul d pe Dn−1
∫
Dn−1
h(x1, . . . , xn−1)dx1 · · · dxn−1 'N0∑
j=0
Bjh(µ1,1, . . . , µj,n−1) (13.15)
si o formula de integrare de ordinul d pe [0, 1]
∫ 1
0(1− t)n−1g(t)dt '
M∑
i=1
Aig(νi) (13.16)
atunci formula de aproximare
∫
Dn
f(x)dx 'M∑
i=1
N0∑
j=1
cijf(Xij) (13.17)
unde Xij = (µj,i(1 − νi), . . . , µj,n−1(1 − νi), νi), cij = AiBj, i = 1, · · · ,m,j = 1, · · · , N0 este o formula de cubatura de gradul d pe Dn.

§13. Formule de cubatura 217
Demonstratie. Folosind (13.14) este usor de vazut ca formula (13.17) esteexacta pentru monoamele de gradul ≤ d. Formula (13.17) este produsulconic al formulelor (13.15) si (13.16). 2
Bile n-dimensionale
Fie Bn bila unitate din Rn care este domeniul din Rn definit prin
Bn = (x1, · · · , xn);x21 + · · ·+ x2
n ≤ 1Vom transforma integrala
∫
Bn
xα11 · · ·xαn
n dx1 · · · dxn (13.18)
ın produsul a n integrale ıntr-o singura variabila. Pentru acestea vom folosicoordonatele sferice. Exista mai multe moduri de a defini coordonatelesferice. Noi vom folosi urmatoarea transformare:
x1 = r cos θn−1 cos θn−2 · · · cos θ2 cos θ1
x2 = r cos θn−1 cos θn−2 · · · cos θ2 sin θ1
x3 = r cos θn−1 cos θn−2 · · · sin θ2...
xn−1 = r cos θn−1 sin θn−2
xn = r sin θn−1
(13.19)
Deci folosind n noi variabile θ1, · · · , θn−1, r cu −π
2≤ θi ≤ π
2, −1 ≤ r ≤ 1,
jacobianul transformarii (13.19) este
J = rn−1(cos θn−1)n−2 · (cos θn−2)n−3 · · · (cos θ3)2 cos θ2
si prin urmare (13.18) se transforma ın produsul urmatoarelor integrale∫ π
2
−π2
(cos θ1)α1(sin θ1)α2dθ1
∫ π2
−π2
(cos θ2))(cos θ2)β2(sin θ2)α3dθ2
...∫ π2
−π2
(cos θn−1)n−2(cos θn−1)βn−1(sin θn−1)αndθn−1
∫ 1
−1|r|n−1rβndr

218 Capitolul 4. Integrarea si derivarea numerica
cu βk = α1 + · · ·+ αk, k = 2, . . . , n.
Consideram formulele de forma
∫ π2
−π2
(cos θk)k−1P (cos θk, sin θk)dθk 'M∑
k=1
Ak,iP (cos θk,i, sin θk,i) (13.20)
unde
θk,i = −θk,M−i+1, Ak,i = Ak,M−i+1 i = 1, · · · ,M k = 1, · · · , n− 1
∫ 1
−1|r|n−1h(r)dr '
M∑
i=1
An,if(ri) (13.21)
ri = −rM−i+1, Ar,i = Ar,M−r+1, i = 1, . . . , M
care satisface conditiile:
C1. Formula (13.21) este exacta cınd h este un polinom de gradul ≤ d.
C2. Pentru fiecare k ∈ 1, · · · , n − 1, formula (13.20k) este exacta cındP (cos θk, sin θk) este o combinatie liniara de termenii: (cos θk)2p(sin θk)q,2p + q ≤ d, p, q ıntregi nenegativi.
Vom arata acum ca formula (13.20) poate fi scrisa sub o forma mai familiara.
Considerınd transformarea yk = sin θk nu este greu sa aratam ca daca for-mula ∫ 1
−1(1− y2
k)(k−1)/2h(yk)dyk '
M∑
i=1
Ak,ih(yk,i) (13.22)
unde yk,i = −yk,M−i+1, Ak,i = Ak,M−i+1, i = 1, . . . , M este exactapentru polinoamele ın yk de grad ≤ d, atunci (13.22) transformata da oformula de forma (13.20) care satisface conditiile C1, C2. Putem lua pentru(13.22) o formula de tip Gauss.
Avem urmatorul rezultat.
Teorema 13.4 Fie ri, An,i si yk,i, Ak,i puncte si coeficienti pentru o formulaGauss cu M puncte. Atunci, ın coordonate carteziene, punctele si coeficientiiıntr-o formula de gradul 2M − 1 pentru Bn sınt dati prin
(νi,1, νi,2, . . . νi,n), A1,i1 . . . An−1,in−1 An,in 1 ≤ ik ≤ M,k = 1, . . . , n(13.23)

§13. Formule de cubatura 219
νi,1 = rin(1− y2n−1,in−1
)1/2 · · · (1− y22,i2
)1/2(1− y21,i1
)1/2
νi,2 = rin(1− y2n−1,in−1
)1/2 · · · (1− y22,i2
)1/2y1,i1...νi,n−1 = rin(1− y2
n−1,in1)1/2yn−2,in−2
νi,n = rinyn−1,in−1
Nu am gasit ınca numarul de puncte ın formula (13.23). Consideram douacazuri:M par: In acest caz ri 6= 0 si punctele ın (13.23) sınt distincte pentrutoate alegerile posibile ale indicilor i1, . . . , in. Prin urmare (13.23) contineMn puncte distincte situate pe M/2 sfere cu razele |r1|, · · · , |rM/2|. Fiecareasemenea suprafata contine 2Mn−1 puncte.
M impar. In acest caz r(M+1)/2 = 0 si pentru in = (M + 1)/2 si i1, · · · , in−1
arbitrari avem νi,1, . . . , νi,n = 0.
Prin urmare Mn−1 puncte coincid cu originea. Celelalte puncte sınt toatedistincte si sınt situate pe (M − 1)/2 sfere cu razele |r1|, . . . , |r(M−1)/2| cu2Mn−1 puncte pe fiecare sfera. Deci (13.23) consta din Mn−Mn−1+1 punctedistincte. Coeficientul pentru punctul din origine este suma coeficientilorpunctelor care coincid cu originea, acest coeficient este
Ar,(M+1)/2
∑
i1
· · ·∑
in−1
A1,i1 · · ·An−1,in−1 =
Ar,(M+1)/2
∑
i1
A1,i1 · · ·∑
in−1
An−1,in−1 =
= Ar,(M+1)/2
n−1∏
k=1
2k−1[Γ(k/2)]2
Γ(k)
Formule nonprodus
Pentru un domeniu Ω dat din RN si un ordin d se doreste o metoda deconstructie a unei ”bune ”formule de integrare pe Ω de ordin cel putin d.
Nu se cunoaste un rezultat general ın acest domeniu. Pentru cazul unidi-mensional o ”buna”metoda de constructie, de exemlu pentru formulele detip Gauss, depinde foarte mult de relatia dintre formulele de integrare sipolinoamele ortogonale.

220 Capitolul 4. Integrarea si derivarea numerica
Relativ putine lucruri sınt cunoscute despre o teorie satisfacatoare ın maimulte dimensiuni. Randau a fost primul care a incercat construirea for-mulelor de integrare folosind polinoamele ortogonale. Mai recent Stroud[92] a obtinut cıteva rezultate despre formulele de integrare si polinoameleortogonale. Ramıne ınca de studiat daca aceste rezultate sınt folositoarepentru constuctia numerica a formulelor de integrare.
O colectie de 12 formule des utilizate ın practica se gasesc prezentate ınDautray si Lions [19]. Pentru un studiu al formulelor de integrare nonprodusrecomandam cu caldura excelenta monografie [92].

Capitolul 5
ANEXE
14 Operatori liniari continui
Scopul acestei anexe este de a prezenta cıteva elemente de teoria operatorilorliniari ce au fost folosite ın aceasta lucrare.
14.1 Spatiul operatorilor liniari si continui
Daca X si Y sınt normate peste acelasi corp de scalari K, atunci un operatorliniar A : X → Y este continuu daca si numai exista M > 0 astfel ca
‖Ax‖Y ≤ M · ‖x‖X , ∀ x ∈ X (14.1)
Cu L(X,Y ) se noteaza multimea operatorilor liniari si continui din X ın Y.Aplicatia
A −→ ‖A‖L(X,Y ) = sup‖x‖=1
‖Ax‖ (14.2)
este o norma pe L(X, Y ). Este evident ca
‖A‖L(X,Y ) = infM ; ‖Ax‖ ≤ M‖x‖, ∀ x ∈ X.Spatiul L(X,Y ) cu norma ‖ · ‖L(X,Y ) este un spatiu normat iar daca Y esteun spatiu Banach, L(X,Y ) este un spatiu Banach. Spatiu X ′ = L(X,K)se numeste dualul lui X si este format din multimea functionalelor liniare sicontinue pe X.
O mare utilizare au aplicaiile A : X → Y , unde X, Y sınt spatii topolo-gice, care duc multimile deschise din X ın multimi deschise ın Y . Aseme-nea aplicatii se numesc deschise. Pentru aplicatiile liniare avem urmatorulrezultat.
221

222 Capitolul 5. ANEXE
Teorema 14.1 (teorema aplicaiei deschise) Daca X, Y sınt spatiiBanach iar A : X → Y este o aplicatie liniara continua si surjectiva, atunciA este o aplicatie deschisa.
O aplicatie A : X → Y se zice ınchisa daca G(A) = (x,A(x)) : x ∈ X ⊂X × Y este o multime ınchisa.
Teorema 14.2 (teorema graficului ınchis) Daca X, Y sınt spatii Banachiar A : X → Y este o aplicatie ınchisa atunci A este o aplicatie continua.
Teorema 14.3 (principiul marginirii uniforme) Fie X un spatiuBanach si Y un spatiu normat, iar (Tα)α∈A o familie de operatori liniarisi continui. Daca pentru orice x ∈ X exista mx ∈ R astfel ca
‖Tαx‖Y ≤ mx ∀ α ∈ A
atunci exista m ∈ R astfel ca
‖Tα(x)‖Y ≤ m‖x‖X , pentru orice α ∈ A si x ∈ X.
14.2 Conjugatul unui operator
Daca A : X → X este un operator liniar si continuu atunci pentru oricey′ ∈ Y ′ aplicatia x′ = y′ A definita prin
x′(x) = y′(Ax) ∀ x ∈ X (14.3)
este o functionala liniara continua pe X.
Aplicatia A′ care face sa-i corespunda elementului y′ ∈ Y ′ elementul x′ dinX ′ definit prin (14.3) se numeste aplicatia transpusa ( sau conjugata ) aaplicatiei A. Avem urmatoarea caracterizare a aplicatiei transpuse.
< A′y′, x >=< y′, Ax >, ∀ x ∈ X, y′ ∈ Y ′. (14.4)
Rezultatul urmator arata ca transpusa unei aplicatii liniare continua este toto aplicatie liniar continua.
Teorema 14.4 Daca A este o aplicatie liniara continua a unui spatiu nor-mat X ın spatiul normat Y atunci aplicatia transpusa A′ este liniara sicontinua din Y ′ ın X ′ iar ‖A′‖L(Y ′,X′) = ‖A‖L(X,Y ).

§14. Operatori liniari continui 223
Daca V ⊂ X este un subspatiu vectorial, se noteaza prin V 0 multimea dinX ′ definita prin
V 0 = l ∈ X ′; l(x) = 0 ∀ x ∈ V .In mod analog, daca W este un subspatiu vectorial din X ′, se noteaza prinW 0 ⊂ X multimea.
W 0 = x ∈; l(x) = 0 ∀ l ∈ W.
Structura multimilor V 0 si W 0 este precizata ın propozitia urmatoare.
Propozitia 14.1 Daca X este spatiu normat, iar V ⊂ X si W ⊂ E′ sıntsubspatii vectoriale, atunci V 0 si W 0 sınt subspatii vectoriale ın X ′ si res-pectiv X. In plus, V 00 = V si W ⊂ W 00. Cınd spatiul X este reflexiv,atunci W 00 = W .
Intre nucleele ker(A) si ker(A′) si imaginile R(A) si R(A′) exista unelelegaturi precizate ın teorema urmatoare.
Teorema 14.5 Daca X,Y sınt spatii normate, iar A : X → Y este oaplicatie liniara continua, atunci
R(A)0 = ker(A′), R(A) = ker(A′)0 si R(A′)0 = ker(A), R(A′) ⊆ ker(A)0.
Daca spatiile sınt Banach atunci avem:
Teorema 14.6 Fie X,Y spatii Banach si A ∈ L(X,Y ).
1) Daca R(A) este un subspatiu ınchis ın Y atunci R(A′) este un subspatiuınchis ın X ′ si R(A′) = ker(A)0.
2) Daca R(A′) este un subspatiu ınchis ın , atunci R(A) este un subspatiuınchis ın Y si R(A) = ker(A′)0.
Daca H este un spatiu Hilbert, teorema de reprezentare Riesz permite definireaunei izometrii canonice, j, ıntre H ′ si H; pentru orice ϕ ∈ H ′ exista x =j(ϕ) ∈ H astfel ca
ϕ(x) = (x, x) =< j(ϕ), x >, ∀ x ∈ H.
• Fie H1,H2 spatii Hilbert cu produsele scalare ( , )1, ( , )2 si izometriilecanonice j1, j2.

224 Capitolul 5. ANEXE
Daca A este operator liniar continuu din H1 ın H2, operatorul A∗ : H2 −→H1 definit prin A∗ = j1A
′j−12 se numeste operator adjunct al operatorului
A.
Operatorul adjunct verifica ecuatia caracteristica
(A∗(y), x)1 = (y,Ax)2 ∀ x ∈ H1, y ∈ H2.
Cum j1, j2 sınt izometrii, A∗ are ın mod esential, aceleasi proprietati ca A′.In particular, A∗ este o aplicatie liniara si continua si ‖A∗‖ = ‖A‖.Daca V este o submultime din spatiul Hilbert H, notam cu V ⊥ = y ∈H; (x, y) = 0, ∀ x ∈ V ortogonalul multimii V . Evident V ⊥ este unsubspatiu ın H. Avem urmatorul rezultat.
Teorema 14.7 Daca H1,H2 sınt spatii Hilbert iar A : H1 → H2 este unoperator liniar continuu, atunci
R(A)⊥ = ker(A∗) si R(A) = ker(A∗)⊥
R(A∗)⊥ = ker(A) si R(A∗) = ker(A)⊥.
In plus, R(A) este un subspatiu ınchis ın H2 daca si numai daca R(A∗) esteun subspatiu ınchis ın H1.
Utilizınd teorema de mai sus se poate demonstra urmatorul rezultat.
Propozitia 14.2 Fie V si W doua subspatii vectoriale ınchise ın spatiulHilbert X. Subspatiul vectorial V +W este ınchis daca si numai daca V ⊥+W⊥ este un subspatiu ınchis.
Demonstratie. Fie p : X → V operatorul de proiectie ortogonal si pW⊥
restrictia acestui operator la W⊥. Dar R(pW⊥) = p(W⊥) este ınchis daca sinumai daca ker(p) + W⊥ = V ⊥ + W⊥ este ınchis. 2
Din teorema anterioara R(pW⊥) este ınchisa daca si numai daca R((pW+)∗)este ınchis.
Notam prin q operatorul de protiectie pe W⊥. Din definitia adjunctului,vedem ca
R(p∗W+) = q(V ).
R(p∗W+) este deci ınchis daca si numai daca q(V ) este ınchis, adica daca sinumai daca V + ker(q) = V + W este ınchis. In concluzie V ⊥ + W⊥ esteınchis daca si numai daca V + W este ınchis.

§15. Puncte extremale 225
Teorema 14.8 (Sard) Fie X, Y, Z spatii Banach, T : X → Y operatorcontinuu surjectiv, U : X → Z un operator liniar continuu. Daca ker(T ) ⊂ker(U) atunci exista o aplicatie liniara continua V : Y → Z astfel ca U =V T.
Pentru cazul ın care Z este corpul scalarilor, teorema lui Sard ia urmatoareaforma:
Teorema 14.9 Fie X, Y spatii Banach si T : X → Y o aplicatie liniaracontinua surjectiva. Daca u ∈ X ′ este astfel ca T (x) = 0 =⇒ u(x) = 0(adica ker(T ) ⊂ ker(u)), atunci exista v ∈ Y ′ astfel ca
u(x) = v(Tx), ∀ x ∈ X.
Demonstratie. Deoarece T (x) = 0 ⇒ u(x) = 0 rezulta ca u ∈ ker(T )0.Cum R(T ) = Y este ınchis, avem ca R(T ′) este ınchis si R(T ′) = ker(T )0.Pe de alta parte ker(T ′) = R(T )0 = 0, deci T ′ este injectiv. Exista v ∈ Y ′
unic astfel ca T ′(v) = u. Din definitia aplicatiei transpuse avem
u(x) = 〈u, x〉 = 〈T ′(v), x〉 = 〈v, Tx〉 = v(Tx)
deci u = v T . 2
15 Puncte extremale
Vom prezenta ın cele ce urmeaza cıteva elemente privind teoria punctelorextremale ale unei multimi dintr-un spatiu normat.
15.1 Submultimi extremale ale unei multimi
Fie K o submultime a unui spatiu vectorial (real sau complex). O submultimenevida A ⊆ K se zice submultime extremala a lui K daca o combinatieconvexa ak1 + (1− a)k2, 0 < a < 1, de puncte din K este ın A numai dacaatıt k1 cıt si k2 sınt ın A. O submultime extremala a lui K constınd dintr-unsingur punct se numeste punct extremal a lui K.
Multimea tuturor punctelor extremale ale lui K se nuoteza cu E(K).
De exemplu daca K = x ∈ Xn, ‖x‖ ≤ r unde X este un spatiu normat iarA = x ∈ Xn; ‖x‖ = r atunci A este o submultime extremala a lui K, iardaca spatiul X este strict convexa orice punct din A este punct extremal allui K.

226 Capitolul 5. ANEXE
Propozitia 15.1 Fie A o submultime extremala a unei multimi convexe Kdintr-un spatiu vectorial topologic X. Atunci E(A) = E(K)
⋂A.
Demonstratie. Incluziunea E(K)⋂
A ⊆ E(A) este evidenta. Pe de altaparte, deoarece A este o submultime extremala a lui K, fiecare punct ex-tremal al lui A este un punct extremal al lui K, de unde
E(A) ⊆ E(K)⋂
A.
Mai mult putem demonstra urmatorul rezultat. 2
Propozitia 15.2 Fie K o submultime a unui spatiu liniar, A1 o submultimeextremala a lui K, si A2 o submultime extremala a lui A1. Atunci A2 este osubmultime extremala a lui K.
Demonstratia este elementara si rezulta cu usurinta.
15.2 Puncte extremale ale unei multimi
Lema 15.1 O multime compacta nevida ıntr-un spatiu normat (mai generalıntr-un spatiu local convex ) are puncte extremale .
Demonstratie. Fie K o submultime compacta ıntr-un spatiu local convexX. Fie A familia submultimilor ınchise nevide extremale ale lui K. OrdonamA prin incluziune. Este usor de vazut ca daca A1 este o subfamilie totalordonata a lui A, multimea nevida
⋂A1 este o submultime ınchisa extremala
a lui K care ofera o margine inferioara pentru A1. Din lema lui Zorn rezultaca A contine un element minimal A0. Presupunem ca A0 contine doua punctedistincte p si q. Exista o functionala x∗ ∈ X∗ astfel ca Rex∗(p) 6= Rex∗(q).Aceasta implica ca
A1 = x;x ∈ A0; Rex∗(x) = infy∈A0Rex∗(y)
este o submultime proprie a lui A0. Pe de alta parte, daca k1 si k2 sınt puncteın K astfel ca ak1 + (1 − a)k2 ∈ A1 pentru a ∈ (0, 1), atunci k1, k2 ∈ A0
deoarece A0 este extremal. Deci A1 este o submultimee ınchisa extremala alui A0. Aceasta contradictie arata ca A0 contine numai un punct, care esteprin urmare un punct extremal al multimii K. 2

§15. Puncte extremale 227
Lema 15.2 Fie X un spatiu normat, G un spatiu ınchis a lui X ϕ un punctextremal al sferei unitare SG∗. Atunci exista o prelungire a lui ϕ pına la unpunct extremal al sferei unitare SX∗ ⊂ X∗.
Demonstratie. Cum bila unitara ınchisa din dualul unui spatiu normateste ∗-slab compacta (teorema lui Alaoglu ) din lema de mai sus rezulta caare puncte extremale. Vom arata ca multimea Aϕ definita prin
Aϕ = f ∈ X∗; f |G = ϕ, ‖f‖ = 1.
este o multime extremala nevida a multimii SX∗ . Intr-adevar, multimeaAϕ este nevida ın virtutea teoremei Hahn-Banach. De asemenea, ea esteconvexa si ∗-slab ınchisa, deoarece
Aϕ =⋂
x∈G
f ∈ E∗; ‖f‖ ≤ 1, f(x) = ϕ(x).
Fie f1, h ∈ SE∗ , f1 6= f2 si 0 ≤ λ ≤ 1 astfel ıncıt λf1 + (1 − λ)f2 ∈ Aϕ. Sapunem ϕ1 = f1|1, ϕ2 = f2|G. Atunci ϕ1, ϕ2 ∈ S∗G si ϕ = λϕ1 + (1 − λ)ϕ2.Tinınd seama de ipoteza ϕ ∈ E(SG∗), rezulta ca ϕ1 = ϕ2 = ϕ, de unde‖f1‖ = ‖f2‖ = 1∗). 1 si f1(x) = f2(x) = ϕ(x) ∀ x ∈ G, deci f1, f2 ∈ Aϕ,ceea ce demonstreaza ca Aϕ este o submultime extremala nevida pentru SE∗ .Cum multimea Aϕ este ∗-slab compacta (fiind ∗-slab ınchisa inclusa ıntr-omultime ∗-slab compacta (SE∗) rezulta, utilizınd Lema 15.13, ca Aϕ admiteun punct extremal f si cum E(Aϕ) = E(SE∗)
⋂Aϕ avem ca f este punctextremal al multimii SE∗ . 2
Teorema 15.1 (Krein-Milman) . Daca K este o submultime compacta,ıntr-un spatiu normat (mai general, ıntr-un spatiu local convex ) X si E =E(K) este multimea punctelor extremale, atunci K ⊆ co(E). Prin urmareco(E) = co(K), si co(E) = K daca K este o multime convexa.
Demonstratie. Fie k ∈ K si k 6∈ co(E). Atunci , dintr-o teorema de sepa-rare, putem gasi x∗ ∈ X si constantele reale c si ε > 0, astfel ca Re x∗(k) ≤ c,Re x∗(co(E)) ≥ c + ε. Fie K1 = x; x ∈ K, Re x∗(x) = infy∈K Re x∗(y).Atunci K1 este o submultime extremala a lui K si K1
⋂E = ∅. Din
Propozitia 15.2 K1 nu are puncte extremale, dar aceasta contrazice Lema15.1. Deci prima asertiune a teoremei este demonstrata, iar asertiunileramase rezulta cu usurinta. 2
1Intr-adevar 1 = ‖λf1 + (1− λ)f2‖ ≤ λ‖f1‖+ (1− λ)‖f2‖ ≤ 1.

228 Capitolul 5. ANEXE
Lema 15.3 Daca Γ este o multime convexa ınchisa marginita dintr-un spatiuvectorial real finit dimensional, atunci pentru orice ϕ ∈ Γ exista h0 puncteextremale ψ1, . . . ψh0 ∈ E(Γ), unde 1 ≤ h0 ≤ dim(Γ) + 1 si h0 numereν1, . . . , νh0 > 0 cu
∑h0j=1 νi = 1, astfel ıncıt ϕ =
∑h0j=1 νiψi.
Lema 15.4 Fie Q o multime compacta ıntr-un spatiu normat (mai generalıntr-un spatiu local convex ) X a carui acoperire convexa ınchisa este com-pacta. Atunci orice punct extremal din co(Q) este din Q.
Demonstratie. Fie p un punct extremal al multimii co(Q), care nu este ınQ. Deoarece multimea Q este ınchisa, putem gasi o vecinatate U0 a originiilui X astfel ca (p + U0)
⋂Q = ∅, si putem atunci gasi o vecinatate convexa
U a originii astfel ca U − U ⊆ U0. Rezulta ca (p + U)⋂
(Q + U) = ∅,astfel ca p 6∈ Q + U . Familia de multimi q + U, q ∈ Q, este o acoperiredeschisa a lui Q; fie qi + U , i = 1, . . . , n o subacoperire finita. FieKi = coqi + U
⋂Q ⊂ qi + U. Atunci Ki este o submultime ınchisa, si deci
compacta, a multimii compacte co(Q). Deci
co(Q) = co(K1
⋃. . .
⋃Kn) = co(K1
⋃. . .
⋃Kn),
unde am folosit faptul ca daca co(A), co(B) sınt multimi compacte atunci
co(A⋃
B) = co(co(A)⋃
co(B)).
Rezulta usor ca p are forma p =∑n
i=1 aiki, ai ≥ 0,∑n
i=1 ai = 1, k1 ∈ Ki; sideoarece p este extremal, ki = p daca ai = 1. Deci
p ∈n⋃
i=1
Ki ⊆n⋃
i=1
(qi + U) ⊆ Q + U.
Aceasta contradictie demonstreaza lema. 2
Lema 15.5 Fie X un spatiu normat real n-dimensional. Atunci, oricarear fi x ∈ X cu ‖x‖ = 1 exista h puncte extremale x1, . . . , xh ale sfereiBX = y ∈ X; ‖y‖ ≤ 1, unde 1 ≤ h ≤ n, h numere λ1, . . . , λh > 0 cun∑
j=1
λj = 1 astfel ıncıt x =h∑
j=1
λjxj .
Demonstratie. Pentru x ∈ X cu ‖x‖ = 1 fie h cel mai mic ıntreg pentrucare exista punctele extremale x1, . . . , xh ale lui BX si numerele λ1, . . . , λh >

§15. Puncte extremale 229
0 cu∑n
i=1 λj = 1 astfel ca
x =h∑
j=1
λjxj . (15.1)
Vom demonstra ca x1, . . . , xh sınt liniar independente. Presupunem ca existanumerele reale µ1, . . . , µh astfel ıncıt
∑hj=1 |µj | 6= 0 si
∑kj=1 µjxj = 0. Exista
x∗ ∈ X∗ cu ‖x∗‖ = 1 astfel ca x∗(x) = ‖x‖ = 1. Folosind x∗ ın (15.1) avem
1 = x∗(x) =k∑
j=1
λjx∗(xj) ≤
h∑
j=1
λjx∗(xj) ≤
h∑
j=1
λj |x∗(xj)| ≤h∑
j=1
= 1
deci x∗(xj)| = 1 ∀ j = 1, . . . , h, mai mult x∗(xj) = 1 ∀ j = 1, . . . , h, deunde
n∑
j=1
µj =n∑
j=1
µjx∗(xj) = x∗(
n∑
j=1
µjxj) = 0.
Cum∑h
j=1 µj = 0 si∑h
j=1 |µi| 6= 0 rezulta ca∑h
j=2 6= 0. (Intr-adevar, daca∑hj=2 |µj | = 0 am avea µj = 0, j = 2, . . . , h si cum
∑hj=1 µj = 0 ar rezulta
µ1 = 0, deci∑h
j=1 |µj | = 0, o contradictie. Putem scrie∑n
j=1 µjxj = 0 subforma
h∑
j=2
µj(xj − x1) = 0
cu∑h
j=2 |µj | 6= 0, ceea ce implica faptul ca x2−x1, . . . , xh−x1 este un sistemliniar dependent, deci dimsp[x2−x1, . . . , xh−x1] ≤ h−2, de unde pentruacoperirea convexa cox1, . . . , xh al punctelor x1, . . . , xh
h∑
j=1
µj(xj − x1) = 0 (15.2)
cu∑h
j=2 |µj | 6= 0, ceea ce implica faptul ca x2−x1, . . . , xh−x1 este un sistemliniar dependent, deci dimsp[x2−x1, . . . , xh−x1] ≤ h− 2, de unde pentruacoperirea convexa cox1, . . . , xh a punctelor x1, . . . , xh obtinem
dim cox1, . . . , xh ≤ h− 2 (15.3)
Deoarece punctele extremale ale lui cox1, . . . xh sınt x1, . . . , xh ıntrucıt elesınt puncte extremale ale lui SX , cox1, . . . xk si deoarece x =
∑hj=1 λjxj ∈
cox1, . . . , xh folosind Lema 15.3 rezulta ca exista un subsistem xi1 , . . . , xih0

230 Capitolul 5. ANEXE
al sistemului x1, . . . , xh, unde 1 ≤ h0 ≤ h − 1 si h0 numere ν1, . . . νh0 cu∑h0j=1 νj = 1 astfel ıncıt x =
∑h0j=1 νjxij , ın contradictie cu minimalitatea lui
h, ceea ce termina demonstratia. 2
Teorema 15.2 Fie X un subspatiu ınchis ın spatiul Banach C(Q) al tuturorfunctiilor continue reale (sau complexe ) pe spatiul compact Q. Pentru oriceq ∈ Q, fie x∗q ın X∗ definita prin x∗q(f) = f(q) ∀ f ∈ X. Atunci, orice punctextremal a sferei unitate ınchise S∗ a lui X∗ este de forma αx∗q cu |α| = 1si q ın Q. Daca X = C(Q) reciproca are loc, adica orice element de formaαx∗q cu |α| = 1 si q ın Q este un punct extremal al lui S∗.
Demonstratie. Fie A multimea tuturor elementelor din X∗ de forma αx∗qcu |α| = 1 si q ∈ Q, astfel ca A ⊆ S∗ − x∗ ∈ X∗; ‖x∗‖ ≤ 1. Fie X∗ cutopologie punctuala (σ(X∗, X)). Deoarece S∗ este convex si *-slab ınchis,atunci co(A) = co(A) ⊂ S∗. Daca x∗ 6∈ co(A), atunci (dintr-o teorema deseparare si din structura functiilor liniare si X∗-slab continue) exista unx ∈ X∗ si constantele reale c si ε, ε > 0, Rex∗(x) ≥ c; Reαx(q) ≤ c − ε,q ∈ Q, |α| = 1. Deci ‖x‖ ≤ c − ε, astfel ca ‖x∗‖ > 1. Deci co(A) ⊇ S∗.Rezulta din Lema 15.5 si teorema lui Alaoglu ca orice punct extremal din S∗
se afla ın A. Reciproc, fie X = C(Q) si fie q ∈ Q astfel ca x∗q = ay∗+(1−a)z∗,unde a ∈ (0, 1) si y∗, z∗ ∈ S∗. Vom arata ca y∗ = z∗ = x∗q . Fie x0 ∈ C(Q),‖x0‖ ≤ 1 si x0(p) = 0 pentru p ıntr-o vecinatate N a lui q. Din teoremaUrıson exista un y ∈ C(Q) astfel ca ‖y‖ ≤ 1, y(q) = 1, y(p) = 0 pentrup 6∈ N . Atunci ay∗(y) + (1− a)z∗(y) = x∗Q(y) = 1 si |y∗(y)| ≤ 1 |z∗(y)| ≤ 1.Deci y∗(y) = z∗(y) = 1. In acelas mod rezulta ca y∗(x0 + y) = z∗(x0 +y) = 1. Deci y∗(x0) = z∗(x0) = 0. Fie acum x1 ∈ C(Q), ‖x1‖ ≤ 1 six1(q) = 0. Atunci pentru fiecare ıntreg n exista o vecinatate Nn a lui qastfel ca |x1(p)| < 1/n pentru p ∈ Nn. Fie Mn o vecinatate a lui q astfelca Mn ⊆ Nn si fie gn ∈ C(Q) astfel ca ‖gn‖ ≤ 1/n, gn(p) = 0 pentrup 6∈ Nn, si gn(p) = x1(p) → x1, ‖x1 − gn‖ ≤ 1, si x1 − gn se anuleazaın Mn. Rezulta ca y∗(x1) = z∗(x1) = 0. Daca x ∈ C(Q) este astfel cax(q) = 0, atunci ‖x/n‖ ≤ 1 pentru n un ıntreg suficient de mare, astfely∗(x) = z∗(x) = 0, scalari α si β astfel ca y∗ = αx∗q , z∗ = βx∗q . (Dacag, f1, . . . fn sint n + 1 functionale liniare si
⋂ni=1 Ker(fi) ⊂ Kerq atunci q
este o combinatie liniara din f1, . . . , fn). Deoarece y∗, z∗ ∈ S∗, |α| ≤ 1,|β| ≤ 1. Cum x∗q = (aα + (1− a)β)x∗q , α = β = 1. Aceasta arata ca x∗q esteun punct extremal al lui S∗. Un argument similar arata ca αx∗q cu |α| = 1este de asemenea un punct extremal. 2

Bibliografie
[1] ARMINJON, Paul, Analyse numerique matricielle, Les Presses del’Universite de Montreal, 1978.
[2] ATKINSON, Kendall E., An Introduction to Numerical Analysis, JohnWiley & Sons, New York, Chichester, Brisbane, Toronto, Singapore,1978.
[3] AUTONNE, L., Ann. Univ. Lyon II,38 (1915), 1–77.
[4] BATHE, Klaus-Jurgen & Edward L. WILSON, Numerical Methods inFinite Element Analysis, Prentice-Hall, Inc. 1976.
[5] BELLMAN, Richard, Introduction to matrix analysis, Mc Graw Hill,1966.
[6] BEREZIN, Ivan Semenoviq & Nikola Petrovik IDKOV,Metody vyqisleni, Gostehizdat Moskva, 1959
[7] BERMAN, Abraham and Robert J. PLEMMONS, Non negative matri-ces in mathematical sciences, Academic Press, 1979.
[8] BERNSTEIN, S.N. Demonstration du theoreme de Weierstrass fondeesur le calcul de probabilites, Comman. Soc. Math. Kharkov 13 (1912),1–2.
[9] de BOOR, Carl , A Practical Guide to Splines, Springer-Verlag, Berlin1979.
[10] BURDEN, Richard L. and Douglas J. FAIRES, Numerical Analysis,PWS - KENT Publishing Company, Boston, ???
231

232 BIBLIOGRAFIE
[11] QEBYXEV, P. L., Teor mehanizmov, izvestnyh pod nazvaniemparallelogramov (1953),23–51 ın Polnoe sobranie soqneni,Moskva - Leningrad, 1947.
[12] CIARLET, Philipe G., Introduction a l’analyse numerique matricielleet a l’optimisation, Masson, Paris 1982.
[13] CIARLET, Philipe G., B. MIRA, J-M. THOMAS, Exercieces d’analysenumerique matricielle et d’optimisation avec solutions, Masson Paris,Milan, Barcelone, Bonn 1991.
[14] COHEN, Alan M., Numerical Analysis, McGraw–Hill Book London,1973.
[15] CONTE, S. & Carl de BOOR, Elementary Numerical Analysis 3th Edi-tion, Mc Graw–Hill Book Company, New York, 1980.
[16] CROUZEIX, Michel et Alain L. MIGNOT, Analyse numerique des equa-tions differentielles, Masson, Paris 1989.
[17] CUCULESCU, Ion, Analiza numerica, Editura tehnica, Bucuresti 1967.
[18] DAVIS, Philip J. & Philip RABINOWITZ, Numerical Integration,Blaisdell Publishing Company, 1967.
[19] DAUTRAY, Robert and Jacques-Louis LIONS, Analyse mathematiqueet calcul numerique pour les sciences et les techniques, Masson, ParisMilan Barcelone Mexico, 1988.
[20] ERLICH, Louis W., The block symmetric successive overrelaxationmethod, J. SIAM, 12, 4 (1964), 807–826.
[21] EUVRARD, Daniel, Resolution numerique des equations aux deriveespartielles, Masson, Paris, 1994.
[22] FORSYTHE, George E. & Cleve B. MOLER, Computer Solution ofLinear Algebraic Systems, Prentice-Hall, Englewood Cliffs, N.J. 1967.
[23] FRANCIS, J. G. F., The QR transformation, I, Computer J. 4 (1961),265-271.
[24] FRANCIS, J. G. F., The QR transformation, II, Computer J. 4 (1962),332– 345.

BIBLIOGRAFIE 233
[25] FRANKLIN, Joel, Methods of Mathematical Economics, SpringerVerlag, 1980.
[26] FROBENIUS, G., Uber Matrizen aus nicht negativen Elementen, S.–B.Preuss. Akad. Wiss. Berlin (1912), 456–477.
[27] GASTINEL, Noel, Linear Numerical Analysis, Hermann, Paris Aca-demic Press, New York 1970.
[28] GENTLEMEN, W. Morven, Least squares computations by Givenstransformations without square roots, J. Inst. Maths & its applics, 12(1973), 326–336.
[29] GIVENS, W., Computation of plane unitary rotations transforming ageneral matrix to triangular form, J. SIAM , 6, 1 (1958), 26–50.
[30] GODLEWSKI, Edwige and Pierre-Arnaud RAVIART, NumericalAppoximation of Hyperbolic Systems of Conservation Laws, SpringerVerlag, 1996.
[31] GOLOMB, Michael, Lectures on Theory of Approximation, ArgonneNational Laboratory, Applied Math. Div., 1962
[32] GOLUB, Gene H. & Gerald A. MEURAT, Resolution numeriquea desgrandes systemes lineaires, Editions EYROLLES, Paris, 1983.
[33] GOLUB, Gene H. & W. KAHN, Calculating the singular values andpseudo inverse of a matrix, J. SIAM Numer. Anal. Ser. B, 2, 12 (1965),205–224.
[34] GOLUB, Gene H. & Charles F. Van LOAN, Matrix Computations, TheJohn Hopkins University Press, Baltimore, Maryland, 1983
[35] GOLUB, Gene H. and F. T. LUK, Singular value decomposition: appli-cations and computations, ARO Report 77-1 Transactions of the 22nd
conference of Army mathematicians, (1977), 577 – 605.
[36] GOLUB, Gene H., F.T. LUK and M. L. OVERTON, A block Lanczosmethod for computing the singular values and coresponding singularvectors of a matrix. TOMS, 7. 2 (1981), 149–169.
[37] GONQAROV, V. L., Teor interpolirovani i priblienifunkci, Gostehizdat Moskva - Leningrad, 1954

234 BIBLIOGRAFIE
[38] GRIGORE, Gheorghe, Lectii de analiza numerica, UniversitateaBucuresti, 1990.
[39] HAGEMAN, Louis A. & David M. YOUNG, Applied Iterative Methods,Academic Press 1981.
[40] HOUSEHOLDER, Alston S., Unitary triangularization of a symmetricmatrix, J. ACM, 5 (1958), 339–342.
[41] HOUSEHOLDER, Alston S., The theory of matrices in numericalanalysis, Blaisdell Publishing Company, 1964
[42] ICHIM, Ion., si Gheorghe MARINESCU Metode de aproximareanumerica, Editura Academiei Romane, 1986.
[43] ILIOI, Constantin, Probleme de optimizare si algoritmi de aproximarea solutiilor, Editura Academiei Romane, 1980.
[44] IONESCU, Dumitru V., Cuadraturi numerice, Editura TehnicaBucuresti, 1957.
[45] IONESCU, Dumitru V., Diferente divizate, Editura Academiei Romane,1978.
[46] ISSACSON Eugene & Herbert Bishop KELLER, Analysis of NumericalMethods, John Wiley & Sons, Inc. 1966.
[47] JOLY, Patrick, Resolution numerique des grandes systemes lineaires,Cours de D.E.A. 1990-1991.
[48] JOLY, Partick, Bases informatiques de la methode des elements finis,D.E.A. d’Analyse Numerique 1991-1992.
[49] JORDAN, Camille, J. Math. pure appl. II, 19 (1874), 35–54.
[50] KARLIN, S. and W. J. STUDDENT, Tchebycheff Systems: WithApplications in Analysis and Statistics, Interscience, New York, 1966.
[51] KREN, M. G., L−problema v abstraktom linnom normirovan-nom prostranstve, 171 - 199 ın volumul N. I. Ahiezer i M.G. Kren, O nekotoryh voprosah teorii momentov, DNTVU,Harkov, 1938

BIBLIOGRAFIE 235
[52] KUBLANOVSKAIA, V. N., On some algorithms for the solution ofcomplete eigenvalue problem, Zh. vych. mat. 1 (1961), 555-570.
[53] KUHN, H. Arhiv der Mathematik, 15 (1964), 316–317.
[54] KURATOWSKI, Kazimierz, Introducere ın teoria multimilor si ıntopologie (traducere din limba polona), Editura tehnica, Bucuresti,1969.
[55] LAURENT, Pierre–Jean, Approximation et optimisation, Hermann,Paris, 1972
[56] LEBESGUE, Henri, Sur l’approximation des functions, Bulletin desSciences mathematiqnes, 22 (1898), 278–287.
[57] LERCH, M., Sur un point de la theorie des functions generatrice d’Abel,Acta Mathematica, 27 (1903), 339–352.
[58] MARINESCU, Gheorghe, Analiza numerica, Editura AcademieiRomane, 1974.
[59] MARUSTER, Stefan, Metode numerice ın rezolvarea ecuatiilorneliniare, Editura Tehnica, Bucuresti, 1981.
[60] MICULA, Gheorghe, Functii spline si aplicatii, Editura Tehnica,Bucuresti, 1978.
[61] MILNOR, John, Analytic proofs of the ”hairy ball theorem” and theBrouwer fixed point theorem, The American Mathematical Monthly, 85(1978), 521 – 524.
[62] MITTAG–LEFFER, G., Sur la representation analytique des fonctionsd’une variable reelle, Randiconti circ. math. Palermo, 14 (1900), 217–224.
[63] MUNTH , C. H. Uber den Approximationssatz von Weierstrass. H.A.Schwarz Festschrift, Math. Abh., Berlin (1914), 303–312.
[64] NATANSON, Izidor Pavlovik Konstruktivna teor funk-ci, Gostehizdat, Moskva – Leningrad, 1949
[65] NICOLESCU, Miron, Sur la meilleure approximation d’une fonctiondonnee, Bul. Fac. st. Cernauti, 12, (1938), 120 – 128.

236 BIBLIOGRAFIE
[66] NICOLESCU, Miron, Soloman MARCUS, Nicolae DINCULEANU,Analiza matematica, Editura Didactica si Pedagogica, Bucuresti, 1971.
[67] ORTEGA James M., & Robert J. PLEMMONS, Extention of theOstrowski-Reich theorem for SOR iterations, Linear algebra and itsapplications, 28 (1979), 177–191.
[68] PAVALOIU, Ion, Interpolation dans des espaces lineaires normes etapplications, Mathematica, Cluj, 12(35) (1970), 149–159.
[69] PERRON, O., Zur Theorie der Uber Matrizen, Math. Ann. 64 (1907),248–263.
[70] PICARD, Emile, Sur la repesentation approchee des functions, C. R.Acad. Sci. Paris 112 (1891), 183–186.
[71] PRENTER, Patricia M., Splines and Variational Methods, Wiley, NewYork, 1975
[72] RALSTON, Anthony, A first course in numerical analysis, Mc GrawHill, Inc., New York, 1965
[73] RAVIART, Pierre-Arnaud et J. M. THOMAS, Introduction a l’analysenumeriques des equations aux derivees partielles, Masson, Paris 1983
[74] RIVLIN, T., An Introduction to the Approximation of Functions,Blaisdell Publ. Waltham, M.A., 1969
[75] ROSCA, Ioan, Numerical and Non Numerical Computing Techniques,Curs International UNESCO, Bucuresti 1978.
[76] ROSCA, Ioan., Analiza Numerica Matriceala, Bucuresti 1997.
[77] ROSCA, Ioan, Elemente de analiza neliniara, Bucuresti 1995.
[78] ROSCA Ioan, Clase de functii speciale, Bucuresti 1996.
[79] ROSCA, Ioan, Metode numerice pentru ecuatii cu derivate partiale,Bucuresti, 1999.
[80] ROSCA, Ioan, Studiul convergentei numerice a unor metode iterative,CCUB, 1974.

BIBLIOGRAFIE 237
[81] ROSCA, Ioan and Mircea SOFONEA, A contractive method in thestudy of nonlinear operators in Hilbert spaces, Studii si cercetari mate-matice, 46, 2(1994), 291– 301.
[82] ROSCA, Ioan and Mircea SOFONEA, Error estimates of an iterativemethods for a quasistatic elastic-viscoplastic problem, Applications ofMathematics, 39, 6(1994), 401–414.
[83] RUNGE, C., Zur theorie der eindeutingen analytishen Funkionen, ActaMath., 6, 229-245, 1885
[84] RUNGE, C., Uber die Darstellung wielkurlicher Funktionen, Acta Math.7, 387-392 1885
[85] SCHUMAKER, Larry L., Spline Functions: Basic Theory, KriegerPublishing Company Malabar, Florida, 1993.
[86] SINGER, Ivan,Cea mai buna aproximare ın spatii vectoriale normateprin elemente din subspatii vectoriale, Editura Academiei Romane,Bucuresti, 1967.
[87] STANCU, D.D, Quadrature formules with multiple gaussian nodes,Siam. Numer. Anal. (1965), 129–143.
[88] STEWART, G. W., Introduction to matrix computations, AcademicPress, 1973
[89] STONE, M.H., The generalized Weierstrass approximation theorem,Math. Magazine, 21 (1948), 167-184 & 237-254.
[90] STRANG, Gilbert, Linear algebra and its applications, Academic Press,1976
[91] STROUD, A. H., A Fifth Degree Integration Formula for then−simplex. SIAM J. Numer. Anal., 6 (1969), 90–98.
[92] STROUD, A. H., Aproximate calculation of multiple integrals, PrenticeHall, Englewood Cliffs, 1971.
[93] STROUD, A. H. and D. SECREST, Approximate calculation of multipleintegrals, Prentice Hall, Englewwood Cliffs, N. J., 1972

238 BIBLIOGRAFIE
[94] TANNEHILL, John C., Dale A. ANDERSON and Richard H.PLETCHER, Computational Fluid Mechanics and Heat Transfer,Taylor & Francis, 1997.
[95] URABE, Minoru, Convergence of numerical iteration in solution ofequations, J. Sci. Hiroshima Univ. ser. A, 19 (1956), 479-489.
[96] URABE, Minoru, Error estimation in numerical solution of equationsby iterations process, J. Sci. Hiroshima Univ. ser. A–I, 26(1962), 79-91.
[97] URABE, Minoru, Component–wise error analysis of iterative methodspracticed on a floting–point system, Memoirs of the Faculty of Science,Kyushu University ser. A, 27(1973), 23 – 64.
[98] VARGA, Richard S. Matrix iterative analysis, Pretince Hall, EnglewoodCliffs, N.J. 1962.
[99] VOLTERRA, Vito, Sue principio di Dirichlet, Rencliconti del circ. mat.di Palermo, 11(1897), 83–86.
[100] WEIERSTRASS, Karl, Uber die analytiche Darstellbarkeit rogenan-nter willkurlicher Funktionen einer reelen Veranderlichen. Sitz.-Ber.Akad. d. Wiss. Berlin (1885), 633–639 & 789–805.
[101] WENDROFF, B., Theoretical numerical analysis, Academic Press,New York, 1966.
[102] WILKINSON, James Hardy The Algebraic Eigenvalue Problem,Clarendon Press, Oxford, 1972
[103] WILKINSON, J. H., Some recent advances in numerical linear alge-bra in: The state of the art in numerical analysis, (editor D. Jacobs),Academic Press, 1977
[104] YOUNG, David M., Iterative solution of Large Linear Systems,Academic Press, New York, 1971.
[105] YOUNG, David M., On the accelerated SSOR method for solving largelinear systems, Advances in Math. 23 (1977), 215–271.
[106] YOUNG, David M. and Robert Tod GREGORY A survey of Numer-ical Mathematics, 2 vol., Addison-Wesley, Reading, Mass. 1975