Telematic A
147
3. CARACTERISTICILE PARTICIPANŢILOR LA TRAFIC .................. 29 3.1. NOŢIUNI GENERALE PRIVIND FACTORUL UMAN ............................................29 3.2. SISTEMUL TRAFICULUI RUTIER............................................................................31 3.3. OMUL - CONDUCĂTOR AUTO ................................................................................33 3.3.1. Simţurile în conducerea autovehiculului ................................................................33 3.3.2. Sistemul senzorial ...................................................................................................34 3.3.3.Calităţile optice ale conducătorilor de autovehicule ................................................35 3.3.4. Alte simţuri în conducerea autovehiculelor ............................................................41 3.3.5. Timpul de percepţie – reacţie..................................................................................42 3.3.6. Timpul de reacţie în manevrele rapide....................................................................43 3.4. OMUL – PIETON ŞI CĂLĂTOR .................................................................................51 3.4.1. Circulaţia pietonilor în oraş ....................................................................................51 3.4.2. Vitezele pietonilor şi comportamentul la traversarea străzii ..................................53 3.4.3. Factori de proiectare a transportului public cu autovehicule ..................................56 4.CARACTERISTICILE GEOMETRICE ALE ARTERELOR RUTIERE ...............59 4.1. INTRODUCERE .......................................................................................................59 4.2. CLASIFICAREA CĂILOR RUTIERE .....................................................................61 4.3. ELEMENTELE GEOMETRICE ALE DRUMURILOR ..........................................64 4.3.1. Profilul longitudinal al drumului ..........................................................................65 4.3.2. Profilul transversal al drumului ............................................................................76 4.3.3. Elementele geometrice ale planului traseului (aliniamentul orizontal) ................78 5. PARAMETRII DE BAZĂ AI TRAFICULUI RUTIER ........................... 83 5.1. INTRODUCERE ...........................................................................................................83 5.2.FORMAREA FLUXURILOR RUTIERE SAU CURENŢILOR DE CIRCULAŢIE....85 5.2.1. Tăria traficului rutier ...............................................................................................86 5.2.2. Densitatea traficului rutier ......................................................................................88 5.2.3. Observaţii asupra vitezelor de circulaţie .................................................................89 5.3. CORELAŢII ÎNTRE PARAMETRII FLUXURILOR RUTIERE ................................94 CUPRINS CUPRINS.....................................................................................................................................I 1. PRINCIPII GENERALE PRIVIND TRAFICUL RUTIER ...................... 2 2. ELEMENTE DE STATISTICĂ MATEMATICĂ ŞI TEORIA PROBABILITĂŢILOR 11 2.1. GENERALITĂŢI. DEFINIŢII. VARIABILE ALEATOARE......................................11 2.2. VARIABILE ALEATOARE DISCRETE .....................................................................12 2.3. VARIABILE ALEATOARE DE TIP CONTINUU......................................................15 2.4. CARACTERISTICILE DE BAZĂ ALE VARIABILELOR ALEATOARE ...............16 2.5. ELEMENTE DE TEORIA ESTIMAŢIEI .....................................................................19 2.6. LEGI DE DISTRIBUŢIE DISCRETE ..........................................................................24 2.6.1. Distribuţia binomială ..............................................................................................24 2.6.2. Distribuţia Poisson ..................................................................................................26 2.6.3. Distribuţia binomial-negativă .................................................................................27 2.7. LEGI DE DISTRIBUŢIE DE TIP CONTINUU ...........................................................28 I
-
Upload
buiakka2003 -
Category
Documents
-
view
110 -
download
0
description
Telematic A
Transcript of Telematic A

CUPRINS...............................................
1. PRINCIPII GENERALE PRI2. ELEMENTE DE STATISTICĂ MAT
2.1. GENERALITĂŢI. DEFINIŢII. V2.2. VARIABILE ALEATOARE DIS2.3. VARIABILE ALEATOARE DE 2.4. CARACTERISTICILE DE BAZĂ2.5. ELEMENTE DE TEORIA ESTIM2.6. LEGI DE DISTRIBUŢIE DISCR
2.6.1. Distribuţia binomială ............2.6.2. Distribuţia Poisson................2.6.3. Distribuţia binomial-negativă
2.7. LEGI DE DISTRIBUŢIE DE TIP
CUPRINS ......................................................................................I
VIND TRAFICUL RUTIER ...................... 2EMATICĂ ŞI TEORIA PROBABILITĂŢILOR 11 ARIABILE ALEATOARE......................................11 CRETE.....................................................................12 TIP CONTINUU......................................................15 ALE VARIABILELOR ALEATOARE ...............16 AŢIEI .....................................................................19
ETE ..........................................................................24 ..................................................................................24 ..................................................................................26 .................................................................................27 CONTINUU ...........................................................28
3. CARACTERISTICILE PARTICIPANŢILOR LA TRAFIC ..................293.1. NOŢIUNI GENERALE PRIVIND FACTORUL UMAN ............................................29 3.2. SISTEMUL TRAFICULUI RUTIER............................................................................31 3.3. OMUL - CONDUCĂTOR AUTO ................................................................................33
3.3.1. Simţurile în conducerea autovehiculului ................................................................33 3.3.2. Sistemul senzorial ...................................................................................................34 3.3.3.Calităţile optice ale conducătorilor de autovehicule................................................35 3.3.4. Alte simţuri în conducerea autovehiculelor ............................................................41 3.3.5. Timpul de percepţie – reacţie..................................................................................42 3.3.6. Timpul de reacţie în manevrele rapide....................................................................43
3.4. OMUL – PIETON ŞI CĂLĂTOR .................................................................................51 3.4.1. Circulaţia pietonilor în oraş ....................................................................................51 3.4.2. Vitezele pietonilor şi comportamentul la traversarea străzii ..................................53 3.4.3. Factori de proiectare a transportului public cu autovehicule ..................................56
4.CARACTERISTICILE GEOMETRICE ALE ARTERELOR RUTIERE ...............59
4.1. INTRODUCERE .......................................................................................................59 4.2. CLASIFICAREA CĂILOR RUTIERE .....................................................................61 4.3. ELEMENTELE GEOMETRICE ALE DRUMURILOR ..........................................64 4.3.1. Profilul longitudinal al drumului ..........................................................................65 4.3.2. Profilul transversal al drumului ............................................................................76 4.3.3. Elementele geometrice ale planului traseului (aliniamentul orizontal) ................78
5. PARAMETRII DE BAZĂ AI TRAFICULUI RUTIER ...........................835.1. INTRODUCERE ...........................................................................................................83 5.2.FORMAREA FLUXURILOR RUTIERE SAU CURENŢILOR DE CIRCULAŢIE....85
5.2.1. Tăria traficului rutier...............................................................................................86 5.2.2. Densitatea traficului rutier ......................................................................................88 5.2.3. Observaţii asupra vitezelor de circulaţie.................................................................89
5.3. CORELAŢII ÎNTRE PARAMETRII FLUXURILOR RUTIERE................................94
I
6. PROIECTAREA INTERSECŢIILOR .......................................................976.1. INTRODUCERE ...........................................................................................................97 6.2. PRINCIPII DE PROIECTARE A INTERSECŢIILOR ................................................98
6.2.1. Factori ce influenţează proiectarea intersecţiilor ....................................................98 6.2.1.1. Factorul uman ....................................................................................................98 6.2.1.2. Caracteristicile vehiculelor ................................................................................99 6.2.1.3. Condiţiile de mediu............................................................................................99
6.2.2. Tipuri de mişcări şi conflicte ale fluxurilor rutiere...............................................100 6.2.2.1. Tipuri de intersecţii ..........................................................................................100 6.2.2.2. Puncte de conflict.............................................................................................102
6.2.3. Capacitatea de circulaţie .......................................................................................105 6.2.4. Nivelul de serviciu ................................................................................................109 6.2.5. Alegerea tipului de intersecţii ...............................................................................112 6.2.6. Caracteristicile intersecţiilor semaforizate............................................................113 6.2.7. Caracteristicile intersecţiilor nesemaforizate........................................................114 6.2.8. Canalizarea fluxurilor rutiere................................................................................114
7. TEGNOLOGII MODERNE DE DETECTARE ...........................................1167.1. INTRODUCERE .........................................................................................................116 7.2. EVOLUŢIA ECHIPAMENTELOR DE DETECTARE .............................................116 7.3. CLASIFICAREA TEHNOLOGIILOR DE DETECTARE.........................................118 7.4. TIPURI DE DETECŢIE ..............................................................................................118 7.5. APLICAŢII ALE TEHNOLOGIILOR DE DETECTARE .........................................121
7.5.1. Concepte de control al arterelor rutiere urbane ....................................................121 7.5.2. Descrierea funcţională a detectorilor ....................................................................123 7.5.3. Controlul intersecţiilor locale ...............................................................................124 7.5.4. Detectarea priorităţii vehiculelor ..........................................................................125 7.5.5. Controlul sistemului de semnale...........................................................................130 7.5.7. controlul şi supravegherea autostrăzii...................................................................132
7. 6. ALTE APLICAŢII ALE TEHNOLOGIILOR DE DETECTARE.............................136 7. 6.1. Monitorizarea vitezei ...........................................................................................136 7.6.2. Clasificarea şi numărarea vehiculelor...................................................................138 7.6.3. Bucle temporare ....................................................................................................140 7.6.4. Detectori pentru pietoni ........................................................................................142
BIBLIOGRAFIE....................................................................................................................143
II

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
OBIECTIVELE CURSULUI
Competenţe cognitive: 1.Să dovedească o bună înţelegere a cunoştinţelor în domeniul managementului fluxurilor rutiere: elementele sistemului rutier – om, vehicul, drum şi relaţia cu mediul înconjurător – cinematica fluxurilor rutiere şi parametrii traficului rutier; principiile de bază ale teoriei fluxurilor rutiere. 2. Să înţeleagă modul în care alte discipline sunt în corelaţie cu acest domeniu: să conştientizeze natura interdisciplinară a sistemelor de transport prin intermediul studiilor de caz; să înţeleagă aparatul matematic folosit în analiza fluxurilor rutiere, pentru aplicarea lor aplicaţiile efectuate; modul în care interacţionează elementele sistemului rutier. 3. Să identifice o situaţie de trafic, să explice conexiunile care se produc, pentru a o putea rezolva; să înţeleagă rolul şi importanţa analizei circulaţiei fluxurilor rutiere.
Competenţe aplicativ – practice: 1.Să demonstreze ca au capacitatea de a crea soluţii inovative şi să îmbunătăţească practicile curente pentru aplicaţiile practice: prelucrarea, analiza şi interpretarea datele culese. 2.Să aibă capacitatea de a corela cunoştinţele similare dobândite pe parcursul traseului de studii. 3.Să aibă capacitatea de a sintetiza şi abilităţi în aplicarea creativă a cunoştinţelor dobândite anterior.
Competenţe de comunicare şi relaţionale: 1.Să demonstreze că au capacitatea de a interacţiona efectiv cu alţii cu scopul de a se organiza în grupuri de 4-5 studenţi care vor lucra pentru achiziţia datelor experimentale, analiza şi pregătirea unui raport. 2.Să aibă abilitatea de a colecta, analiza şi organiza informaţia şi ideile şi de a le exprima fluent atât vorbit cât şi în scris: exerciţiile de învăţare independentă permit studenţilor să identifice noi surse de informaţie pentru rezolvarea unor probleme noi. 3.Să aibă abilitatea de a se angaja efectiv în folosirea tehnologiilor de comunicare şi informare: folosirea unei platforme electronice de învăţare.
CONŢINUTUL ORELOR DE LABORATOR
1.Proceduri de măsurare a fluxurilor rutiere
1.1.Analiza sosirii vehiculelor într-un punct
1.2.Măsurători cvasi – locale
1.3.Măsurători cvasi - momentane
1.4.Metoda observatorului mobil
2.Întocmirea fişelor pentru culegerea datelor de trafic
3.Culegerea datelor de trafic în teren şi prelucrarea datelor
4.Proiectarea geometrică a drumului
5.Proiectarea intersecţiilor semaforizate
6.Aplicaţii ale tehnologiilor de detectare
1

1. PRINCIPII GENERALE PRIVIND TRAFICUL RUTIER
Evoluţia civilizaţiei umane este strâns legată de posibilităţile de transport ale produselor
activităţilor economice şi pentru realizarea de relaţii tot mai strânse între diferite grupuri de
oameni. S-a născut astfel, necesitatea perfecţionării continue a mijloacelor de transport şi crearea
unor vaste reţele de transport. O dată cu inventarea automobilului şi trecerea la producţia de masă
a diverselor tipuri de autovehicule, s-a realizat dezvoltarea reţelelor de transport rutier, care leagă
între ele marile aglomeraţii urbane şi practic toate localităţile unei ţări. Centrele populate, urbane
şi rurale, sunt direct afectate de creşterea mobilităţii populaţiei şi de circulaţia tot mai intensă a
mărfurilor.
Circulaţie rutieră reprezintă mişcarea generală de vehicule şi persoane, concentrată pe
suprafeţe de teren amenajate special în acest scop, respectiv drumurile. Fenomenul circulaţiei
rutiere sau a traficului rutier se manifestă tot atât de clar pe distanţe mari, în teritorii largi, cât şi
în zone restrânse (oraşe şi alte tipuri de aşezări). Ca urmare a perfecţionării continue a
autovehiculelor, s-a ajuns astăzi la ritmuri ridicate şi proporţii foarte mari de evoluţie a circulaţiei
rutiere. Practic are loc o explozie rutieră.
Parcul mondial de autovehicule a ajuns la cifre impresionante. În întreaga lume circulă în
prezent peste 700 milioane de autovehiculele de toate tipurile şi categoriile şi an de an sunt
produse din ce în ce mai multe astfel de mijloace de transport. Această situaţie a dus la atingerea
limitei de saturaţie a gradului de motorizare, în special în ţările puternic industrializate.
Gradul de motorizare are tendinţa continuă de creştere şi în celelalte ţări. În România, la
sfârşitul deceniului nouă erau înregistrate peste 3.200.000 de autovehicule de diferite categorii
(autoturisme, autocamioane, autobuze, microbuze, motorete, motociclete) şi tendinţa de creştere a
parcului s-a menţinut şi în ultimii ani. Nu există indici ca acest proces să se oprească. Este
cunoscut faptul că limita de saturaţie a gradului de motorizare a unei ţări este în jur de 2,5...3
persoane la un autoturism convenţional. Ori, la noi în ţară, mai sunt multe de făcut în acest
domeniu. În primul rând este necesară dezvoltarea puternică a infrastucturii rutiere şi
modernizarea celei existente.
Centrele urbane şi rurale sunt afectate direct de mobilitatea populaţiei. Analiza modului în care
se desfăşoară traficul rutier în localităţi indică, indiferent de tipurile de mijloace de transport
utilizate, trei faze principale de deplasare ale populaţiei:

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
• alternanţa zilnică a deplasării în dublu sens locuinţă - loc de muncă;
• vizitarea în timpul liber a zonelor administrative, comerciale, culturale, sociale şi pentru
contacte individuale sau în grup şi ieşirile pe durate mai scurte sau mai lungi în locuri de
odihnă, turism şi agrement, care pot fi intra - sau extraurbane.
Aceste trei faze principale de deplasări se suprapun mai mult, mai puţin sau de loc, în timp.
Fiecare însă, generează ore de vârf, perioade de vârf, în care preluarea traficului de către reţeaua
stradală şi cea a mijloacelor de transport se loveşte de mari dificultăţi. În plus la traficul rutier
participă în proporţii imense autovehiculele pentru transportul de mărfuri.
Perceperea simultană, globală, a fenomenului circulaţiei rutiere dă o primă impresie de
“forfotă”, de mişcare total anarhică în conţinutul său, greu de controlat, coordonat, dirijat şi
stăpânit. În realitate, acest proces stohastic poate fi descompus pentru analiză şi studiu. Această
descompunere poate fi finalizată după direcţiile principale de deplasare a populaţiei şi a
mărfurilor. Caracterul aparent haotic al traficului rutier provine de la faptul că însumează un
număr foarte mare de particule în mişcare (autovehicule şi pietoni), care efectuează deplasări
foarte diverse ca scop, destinaţie, distanţă, urgenţă, importanţă, traseu.
Este caracteristic faptul că, în special, aglomeraţiile urbane, practic sunt sufocate de prezenţa
autoturismelor, care dispunând de o autonomie deosebită de deplasare pot satisface cele mai
diverse pretenţii şi care, ocupă trama stradală zi noapte, în plus un număr foarte mare de
autocamioane asigură aprovizionarea cu mărfurile necesare. Mari aglomeraţii de autovehicule îşi
manifestă din plin prezenţa pe autostrăzile lumii şi pe drumurile cât de cât mai importante.
Autoturismele, prin numărul lor mare şi autonomia de mişcare, generează un grad extrem de
ridicat de ocupare a reţelei stradale.
Considerentele principale legate de dificultăţile generate de autoturisme pentru traficul rutier
sunt:
• prezenţa în masă a autoturismelor pe teritoriul unei localităţi determină o gravă risipă de
teritoriu;
• din 24 de ore ale unei zile, autoturismul circulă în medie 2 ore, restul de 22 de ore
staţionează, pentru aceasta, el necesită cel puţin două locuri de parcare, la domiciliul
proprietarului şi la locul de muncă al acestuia;
• în comparaţie cu orice alt mijloc de transport în comun, autoturismul ocupă, raportat la o
persoană transportată, o suprafaţă mult mai mare a reţelei stradale: 1 autobuz ocupă în
3

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
timpul deplasării aproximativ 30 m2 şi transportă în medie 50 de persoane, pe când un
autoturism ocupă circa 15 m2 şi transportă în medie 2,5 persoane. Din această comparare
rezultă o ocupare de cel puţin 10 ori mai mare a reţelei stradale de către autoturisme faţă de
autobuze. Având în vedere manevrabilitatea autoturismelor, se poate aprecia că, la efect
egal, acestea ocupă de 5 ori mai mult trama stradală.
Prezenţa masivă a autovehiculelor în viaţa de zi cu zi a omului modern a dus la manifestarea
puternică a “crizei de circulaţie”, care se caracterizează printr-o mare risipă de timp şi de resurse.
Principalele efecte negative ale crizei de circulaţie sunt:
• dificultatea de a circula pe autostrăzi, marile magistrale rutiere şi arterele principale ale
oraşelor, care poate culmina cu blocările de circulaţie, până la ambuteiaje complete, care
pot fi soluţionate numai cu o mare risipă de timp;
• limitarea progresivă a vitezei medii de circulaţie, care în marile aglomeraţii urbane se
reduce la 5...10 km/h, cu mult sub viteza unei biciclete;
• creşterea excesivă a consumului de combustibil a autovehiculelor la deplasarea în zone
aglomerate;
• mărirea bruscă a gradului de poluare a atmosferei cu noxe chimice şi sonore şi cu pulberi;
• excesul de semne, marcaje şi semnale de circulaţie;
• aglomeraţii la staţiile de alimentare, garaje, parcări şi ateliere de întreţinere;
• fenomenul de “scăpare”, prin care un conducător auto o dată ieşit dintr-o zonă
supraaglomerată sau ambuteiaj, se duce “ca din puşcă” cu viteză excesivă.
Aceste efecte negative reprezintă factori perturbatori marcanţi în traficul rutier, care se
manifestă în sfera psiho - socială a conducătorilor auto şi a celor care beneficiază de serviciile
transportului cu autovehicule. Factori perturbatori sunt consecinţa contradicţiilor specifice crizei
de circulaţie:
• contradicţia dintre dificultăţile circulaţiei rutiere, care necesită manevre de mare fineţe şi
siguranţa deplină în conducere, şi amatorismul pronunţat al majorităţii conducătorilor de
autovehicule;
• contradicţia dintre viteza lentă cu care se circulă în marile oraşe şi pe magistralele rutiere
supraaglomerate şi tendinţa omului modern de a trăi, munci şi circula cu viteză mare;
4

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
• contradicţia dintre marea pierdere de timp determinată de circulaţia supraaglomerată,
întreţinerea şi repararea autovehiculelor şi progresiva şi continua lipsă de timp a omului
contemporan;
• contradicţia dintre nevoia omului de a se relaxa chiar şi în pauzele foarte scurte, la
staţionarea autovehiculului şi imposibilitatea de a realiza acest lucru din cauza poluării
excesive a căilor de circulaţie;
• contradicţia dintre încordarea psihică şi fizică a conducătorului auto la parcurgerea traseelor
supraaglomerate şi deconectarea totală la ieşirea din aceste trasee;
• contradicţia dintre capacitatea limitată de recepţie a omului şi supraîncărcarea căilor rutiere
cu marcaje, semne şi semnale.
Pe de altă parte criza de circulaţie are şi unele efecte pozitive, mai ales în planul psiho -
social:
• transformă circulaţia rutieră într-o structură economică şi socială cu caracteristici proprii,
care are un rol important în desfăşurarea normală a activităţii unei comunităţi;
• transformă masa conducătorilor auto într-o comunitate bazată pe asemănarea conduitei,
care se manifestă ca o “mulţime” care influenţează comportamentul individual;
• generează în rândul conducătorilor auto a asociaţiilor cu caracter de grup, automobil-
cluburile;
• determină accentuarea tuturor formelor de manifestare a coeziunii sociale (contactul spaţial,
psihic şi social);
• stabileşte interacţiunea reciprocă atât între conducătorii auto, cât şi între aceştia şi organele
administrative şi de stat care au atribuţii în organizarea, coordonarea, dirijarea şi controlul
circulaţiei rutiere;
• existenţa şi extinderea circulaţiei rutiere determină dezvoltarea sistemului de control social
al circulaţiei, care se poate realiza prin însuşirea de către conducătorii auto a legislaţiei
rutiere şi a tehnicii conducerii autovehiculelor şi a valorilor legate de ele.
Astfel, conducătorii auto trebuie să se supună acestora constituind o obligativitate interioară şi
material-socială, reflectată în obligativitatea de a respecta semnele, semnalele şi marcajele
rutiere.
Deci, este necesar să se acorde cea mai mare atenţie studiului temeinic al circulaţiei
autovehiculelor în vederea cunoaşterii cât mai exacte a fluxurilor rutiere între şi în nodurile
5

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
reţelelor de drumuri, pentru a putea stabili cele mai bune măsuri de programare, coordonare şi
control a acestui proces de o complexitate deosebită, cu efecte considerabile asupra vieţii sociale
şi economice ale fiecărei localităţi mai importante, sau a fiecărei ţări. Toate acestea sunt necesare
pentru a asigura desfăşurarea traficului rutier în condiţii de siguranţă sporită, pentru creşterea
eficienţei activităţii de transport cu autovehicule şi pentru a limita pierderile de vieţi omeneşti şi
risipa resurselor materiale.
Prin metodele managementului traficului rutier, trebuie să se asigure corelarea în limita
posibilităţilor, a următorilor parametri mai importanţi:
• mobilitatea populaţiei;
• gradul de motorizare;
• densitatea populaţiei în diverse zone;
• capacitate de trafic stradală, inclusiv staţionarea şi parcarea autovehiculelor, pentru a
asigura desfăşurarea circulaţiei rutiere în condiţii ridicate de siguranţă.
Corelarea mărimii fluxurilor rutiere cu capacitatea de trafic a reţelelor rutiere presupune
utilizarea unor metode adecvate de achiziţie, prelucrare şi interpretare, dacă este posibil în timp
real, a unui volum mare de date privind numărul participanţilor la deplasare, precum şi a unor
instalaţii flexibile de achiziţie, prelucrare şi dirijare automată a fluxurilor de autovehicule şi
pietoni, asistate şi conduse de microcomputere.
De asemenea, este necesară folosirea unui instrument exact matematic de analiză, simulare şi
coordonare, cum sunt: prelucrarea statistică a datelor şi teoria probabilităţilor, programarea
matematică, teoria estimaţiei, prognoza matematică; teoria grafurilor şi a reţelelor, teoria şirurilor
şi a sistemelor de aşteptare, teoria reglării automate; modelarea matematică a fluxurilor rutiere,
metode numerice de calcul şi teoria continuităţii.
Traficul rutier reprezintă un sistem tipic, om - autovehicul - drum şi de aceea, este necesar să
se acorde o atenţie corespunzătoare analizei fiecăruia din aceşti participanţi şi a implicaţiei
directe a lor asupra desfăşurării fluente a circulaţiei, în condiţii depline de securitate rutieră. Este
deci, necesară cunoaşterea funcţiunilor acestora şi a modului în care se poate acţiona asupra lor
pentru corelarea şi optimizarea desfăşurării normale a circulaţiei rutiere, în vederea asigurării
eficienţei maxime a transportului de persoane şi bunuri cu autovehiculele.
Autovehiculele care participă la traficul rutier diferă foarte mult între ele prin destinaţie,
particularităţi constructive şi capacitate de trecere.
6

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
Din punct de vedere al destinaţiei, autovehiculele se împart în:
• autovehicule pentru transportul de persoane (autoturisme, microbuze, autobuze şi
automobile de performanţă);
• autovehicule pentru transportul de mărfuri (autocamioane şi autoutilitare);
• autovehicule de tracţiune (autotractoare cu semiremorci şi remorci);
• autovehicule pentru servicii auxiliare şi speciale (autobasculante, autocisterne,
automacarale, autosanitare etc.).
Toate aceste destinaţii, determină forme şi dimensiuni diferite ale caroseriilor, performanţe
dinamice şi economice diverse, precum şi capacităţi de trecere, de maniabilitate şi stabilitate
foarte diferite. De asemenea, tot în funcţie de destinaţie autovehiculele sunt echipate cu motoare
şi transmisii foarte diverse, precum şi cu alte sisteme şi echipamente, care contribuie la creşterea
confortului acestora şi la sporirea siguranţei circulaţiei rutiere.
Creşterea parcului mondial de autovehicule a dus la perfecţionarea continuă a organizării şi
coordonării circulaţiei lor. Un accent deosebit se pune pe proiectare şi construcţia de drumuri cu
curbe line, suprafeţe netede, declivităţi mici, şi cu diferite semne, semnale şi marcaje rutiere.
Toate acestea sunt strâns legate de asigurarea unei vizibilităţi corespunzătoare, printr-o proiectare
raţională a elementelor geometrice ale drumurilor.
La proiectare drumurilor şi organizarea circulaţiei autovehiculelor se are în vedere viteza de
proiectare a drumurilor în funcţie de care se stabilesc: profilurile transversal şi longitudinal ale
unui drum şi planul traseului acestuia.
Sistemul traficului rutier
Folosirea metodelor de ordonare sistematică a traficului se conduce după criterii de eficienţă
în concordanţă cu condiţiile locale existente. Prin folosirea metodelor de direcţionare se creează
sistemele de trafic. Prin introducerea sistemelor de prelucrare a datelor a devenit posibilă crearea
sistemelor de reglare, adică cu posibilitatea de adaptare în raport cu situaţiile de trafic actuale. Se
poate vorbi astfel, despre o reglare automată a fluxurilor de trafic.
Aprecierea şi valorificarea măsurilor capabile să influenţeze traficul reprezintă o sarcină
complexă, mai ales că aceste măsuri devin eficiente, nu singure, ci împreună cu strategia de trafic
adoptată. Ponderea fiecărei măsuri în parte poate fi foarte diferită în funcţie de coordonatele în
timp şi spaţiu.
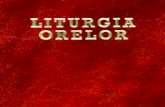
Ca elemente ale sistemului om - vehicul – drum, conform figurii 1.1 avem:
7

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
- omul ca şi conducător al mijloacelor de transport;
- vehiculul, mijloc de transport pentru mişcarea bunurilor de transportat;
- reţeaua căilor de transport ca sistem al legăturilor de
trafic, al punctelor de intersecţie şi de bifurcaţie.
Sistemul traficului rutier este o succesiune în timp şi spaţiu
a acţiunii reunite a tuturor elementelor, în cadrul căruia
acţionează factori fizici, sociali şi organizatorici sau sunt
produse de sistem.
Omul influenţează desfăşurarea traficului în mod
considerabil după ce înregistrează şi prelucrează informaţiile,
prin transformarea rezultatelor în decizii. În acest sens trebuie
luate în considerare: perceperea şi recepţionarea unui stimul,
cunoştinţe, prelucrarea informaţiei, decizia şi reacţia. Cunoaşterea în sistem a omului este
relevantă pentru ordonarea traficului. Ea este măsurabilă cu ajutorul gradului de percepţie şi a
modelului de urmărire, fiind dependentă de deciziile luate şi aplicate.
Figura 1.1. Sistemul om – vehicul – drum - mediu
Deciziile conducătorului sunt aptitudini, stări de spirit, motivaţii. Dintre motivaţii pot fi
amintite aspiraţia spre avantaje personale (durata
călătoriei cât mai scurtă, viteză mare, confort,
siguranţă) şi, nu în ultimul rând, economie de
combustibil sau sentimentul solidarităţii cu o anumită
grupă de persoane, cum ar fi pietonii sau bicicliştii.
Aceste scopuri pot fi realizate cu ajutorul mijloacelor
de comunicare adecvate. Prioritar este însă avantajul
personal, dacă se urmăreşte o anumită direcţie de mers.
Vehiculul – ca un caz special, omul însuşi - ca
pieton, influenţează imaginea traficului pe de o parte
ca elemente singulare (de sine stătătoare), pe de alta ca
elemente reunite ale sistemului. Figura 1.2. Sisteme de reglare
automată
Automobilul poate fi analizat în mişcare şi poate fi descris cu ajutorul mai multor caracteristici
distinctive. Aceste date au o importanţă crescută în oraşe. Ele vor fi definite drept caracteristici
distinctive ale desfăşurării traficului. Dintre acestea au fost amintite: tăria şi densitatea traficului,
8

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
timpul mediu de parcurs şi viteza medie, întârzierea medie, ocuparea benzilor, timpul mediu de
oprire, lungimea cozilor şi durata aşteptărilor, influenţa mediului şi consumul de combustibil.
Determinarea acestor caracteristici se face în timp şi spaţiu, luând în considerare şi elementele
constructive.
Reţeaua de drumuri este cea care asigură buna desfăşurare a traficului, din punct de vedere al
spaţiului. Caracteristică este în acest caz, descrierea suprafeţelor de trafic disponibile în zona
intersecţiilor:
• lungimea segmentului de parcurs;
• numărul şi lăţimea benzilor pe un segment de parcurs (traseu);
• înclinarea şi structura benzilor;
• vizibilitatea;
• numărul de benzi pentru fiecare acces al intersecţiei;
• viteza de proiectare, respectiv viteza maximă stabilită;
• marcarea şi semnalizarea.
Asupra acţiunii reunite a acestor elemente de sistem acţionează factorii de mediu care
condiţionează sau favorizează traficul. Sistemul însuşi, poate să genereze influenţe, care să
acţioneze de cele mai multe ori într-un mod neplăcut asupra mediului înconjurător.
Influenţele fizice acţionează direct asupra vehiculelor şi a reţelei de trafic şi indirect asupra
oamenilor. Pot fi enumerate astfel condiţiile meteorologice, întunericul, obstacolele din
apropierea drumului, condiţiile de drum precum şi starea tehnică a vehiculelor.
Influenţele sociale se produc pe de o parte ca urmare a prezenţei diferitelor sisteme de trafic şi
de producţie, pe de altă parte prin legislaţia rutieră, care are un rol de bază. De regulă, omul
devine conştient de importanţa mediului în sistemul traficului rutier cu ajutorul mijloacelor de
comunicaţie. Cu acestea este influenţată faza luării deciziilor în raport cu legislaţia concretizată în
marcaje, indicatoare sau semnale rutiere. Manipularea factorilor organizatorici oferă adesea
posibilitatea folosirii sistemelor de direcţionare adaptabile.
Influenţa asupra persoanelor se produce printr-o serie de măsuri care se conduc după anumite
puncte de vedere strategice. Omul are alături un aşa numit sistem de dirijare alternativ care ia
hotărâri în locul lui. Conducerea se produce după reguli şi regulamente care, corespunzător
experienţei acumulate, urmează să ofere forma dorită a fluxului rutier. Succesiunea acestor
acţiuni conduce la un sistem cu reacţie inversă descris în figura 1.2.
9

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
În general, un semafor va fi pus în funcţiune, astfel încât o anumită mărime reglată w (de
exemplu lungimea cozilor) să rămână constantă pe o anumită distanţă reglată (spaţiul
aglomerării).
Ca factor perturbator z, apare în acest caz variaţia fluxului rutier. Pentru a elimina influenţa
acestui factor, acţionează mărimea y, prin intermediul semaforului asupra mărimii x, (lungimea
aglomerării) pentru ca aceasta, conform definiţiei să rămână constantă.
În cazul “succesiunii deschise de acţiuni” (sistem deschis) care implică noţiunea de
direcţionare, va fi influenţată numai mărimea reglată, fără ca rezultatele să fie analizate direct şi
abaterile de la regulă să fie corectate.
În contrast cu acest caz este cazul “succesiunii închise de acţiuni” sau sistemul cu reacţie
inversă.
Un element important al acestei succesiuni este elementul de reglare, de exemplu, instalaţia de
trafic, care calculează abaterile valorii reale a mărimii reglate, faţă de valorile date (variabila w)
şi încearcă să minimizeze abaterea, cu ajutorul unei modificări a variabilei y. O astfel de
succesiune de acţiuni, deseori denumită adaptabilă dinamic sau independentă de conducere,
corespunde noţiunii fizice a reglării, respectiv a buclei de reacţie.
DE LA …ROATĂ….
......LA SISTEME INTELIGENTE DE TRANSPORT!
10

MANAGEMENTUL TRAFICULUI RUTIER SI TELEMATICĂ RUTIERĂ
2. ELEMENTE DE STATISTICĂ MATEMATICĂ ŞI TEORIA
PROBABILITĂŢILOR
2.1. GENERALITĂŢI. DEFINIŢII. VARIABILE ALEATOARE
Pentru cercetarea caracteristicilor traficului rutier se folosesc o serie de metode matematice
care permit stabilirea unor interpretări juste a fenomenelor care au loc. În funcţie de natura
problemelor ce se pun, se utilizează metode ale statisticii matematice şi ale teoriei
probabilităţilor, elemente de programare liniară şi de teoria grafurilor, elemente de teoria
şirurilor de aşteptare şi noţiuni de teoria reglării automate.
Având în vedere importanţa deosebită a statisticii matematice şi a teoriei probabilităţilor
pentru studiul traficului rutier, în continuare se prezintă elementele de bază ale acestor
metode.
Prin statistică matematică se înţelege elaborarea unor modele matematice pentru studiul
fenomenelor de masă în care se manifestă întâmplarea. Prin fenomen de masă se înţelege un
fenomen care se compune dintr-un număr complex de fenomene individuale care se produc în
urma realizării unui anumit complex de condiţii bine determinate.
Realizarea practică a unui complex de condiţii conduce la un rezultat numit eveniment (de
exemplu, aruncarea cu zarul, dar şi sosirea autovehiculelor într-un punct, într-un anumit
interval de timp).
În sfârşit, toate referirile au la bază teoria probabilităţilor. În această teorie se cunosc
factorii de bază care determină apariţia unui eveniment, dar nu poate fi cunoscut cu exactitate
absolută rezultatul final. Spre deosebire, în statistica matematică se cunoaşte rezultatul, dar nu
se cunosc cauzele care l-au generat. Astfel, în studiul fenomenelor întâlnite în traficul rutier
este necesară combinarea celor două teorii.
Se definesc următoarele noţiuni de bază:
• Spaţiul eşantioanelor. Totalitatea rezultatelor unei anumite experienţe formează spaţiul
eşantioanelor, spaţiu care poate fi finit sau infinit.
-un spaţiu al eşantioanelor care conţine cel mult o mulţime numărabilă de valori se
numeşte discret;
-un spaţiu al eşantioanelor care conţine o mulţime nenumărabilă de puncte se numeşte
continuu;
11

MANAGEMENTUL TRAFICULUI RUTIER SI TELEMATICĂ RUTIERĂ
-o submulţime care nu conţine nici un punct (rezultat) este o mulţime vidă şi reprezintă
un eveniment imposibil. Un eveniment care conţine toate punctele spaţiului eşantioanelor
este un eveniment sigur E (cu siguranţă se va realiza unul din rezultatele posibile);
-măsura probabilistică este o funcţie care stabileşte corespondenţa între submulţimile
spaţiului, notat cu Ω şi mulţimea numerelor reale pozitive, cuprinse între 0 şi 1 inclusiv.
Măsura probabilistică are următoarele proprietăţi:
P(Ai)≥0,
P(Ai∪Aj)=P(Ai)+P(Aj),
( )∑∞
=
∞
=
=⎟⎟⎠
⎞⎜⎜⎝
⎛
11 ii
ii APAP U ,
dacă evenimentele sunt disjuncte. În plus avem:
P(φ)=0, P(Ω)=1,
unde, P este o funcţie al cărui domeniu de definiţie este o clasă de mulţimi de puncte,
respectiv pe intervalele axei reale, pe care le vom nota cu f(x), g(x) etc.
• Variabilă aleatoare (întâmplătoare) este o funcţie reală definită pe spaţiul eşantioanelor.
Denumirea aleatoare accentuează faptul că avem de a face cu experienţe guvernate de
legile întâmplării şi nu de legi deterministe. Prin repetarea unei experienţe se constată o
anumită regularitate; totuşi este imposibilă anticiparea cu certitudine a rezultatului unei
experienţe întâmplătoare. Fiecărui rezultat al experienţei îi corespunde un punct din spaţiul
eşantioanelor şi acestuia un număr real (sau uneori complex). Corespondenţa între un punct
în spaţiul numerelor reale este dată de o funcţie numită variabilă aleatoare notată fie cu
litere mici greceşti, fie cu litere mari X, T etc.
2.2. VARIABILE ALEATOARE DISCRETE
Variabilele aleatoare întâlnite în teoria traficului rutier sunt strâns legate de datele statistice
obţinute prin observaţii şi măsurători.
Datele statistice, sub forma lor brută, reprezintă o masă dezordonată de valori. De aceea,
pentru ca ele să poată fi analizate ulterior şi apoi utilizate în anumite deducţii generalizatoare,
este necesar să primească o anumită formă şi o structură clară.
Pentru simplificarea calculelor şi pentru o mai uşoară interpretare a rezultatelor se va face
o grupare a observaţiilor (discrete sau continui) efectuate asupra unei singure caracteristici a
unui număr mare de elemente.
12

MANAGEMENTUL TRAFICULUI RUTIER SI TELEMATICĂ RUTIERĂ
Intervalul de variaţie al acestor date va fi împărţit într-un anumit număr de subintervale şi
se va înregistra numărul de observaţii care cad în fiecare din ele. Acest număr poartă numele
de frecvenţă absolută a intervalului sau clasei, iar raportul dintre frecvenţa absolută şi
numărul total de observaţii se numeşte frecvenţă relativă şi este de fapt o probabilitate.
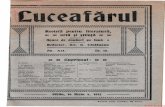
Pentru exemplificare pot fi urmărite datele din tabelul 2.1 precum şi graficele
corespunzătoare din figura 2.1, care descriu sosirea autovehiculelor într-o secţiune a drumului
(punct), pe banda a doua de circulaţie, accesul dinspre Bucureşti, la 50 m de intersecţia Str.
Calea Bucureşti _ Str. Poienelor – B-dul Saturn, în data de 10 octombrie 1998, ora 1600-1700.
Datele au fost culese la fiecare 10 secunde, deci vom avea un număr de N=3600/10=360
intervale, în fişele prezentate la activitatea de laborator.
Tabelul 2.1 : Exemplu de calcul a frecvenţelor relative
Frecvenţa cumulată în sens
crescător
Frecvenţa cumulată în sens
descrescător
Nr. de vehicule într-un
interval, xi
Frecvenţa absolută, Ni
Frecvenţa relativă, fi
fΣ> fΣ<
0 85 0,236111 0,236111 1 1 108 0,3 0,536111 0,763889 2 72 0,2 0,736111 0,463889 3 38 0,105556 0,841667 0,263889 4 31 0,086111 0,927778 0,158333 5 15 0,041667 0,969444 0,072222 6 11 0,030556 1 0,030556
Total 360 1
0
0,05
0,1
0,15
0,2
0,25
0,3
0,35
0 1 2 3 4 5 6x
f
f
0,8
1
0
0,2
0,4
0,6
0 1 2 3 4 5 6
f>
f<
Figura 2.1. Histograma frecvenţei relative Figura 2.2. Frecvenţele cumulate
Repartiţiile de frecvenţe se reprezintă grafic sub forma histogramelor. Histograma se
construieşte manual sau mai simplu cu ajutorul programelor ca EXCEL(© Microsoft
Corporation) sau MATHCAD(© Mathsoft Inc.), înregistrând pe abscisă intervale de valori
corespunzătoare numărului de vehicule sosite în intervalul de timp, iar pe ordonată frecvenţele
relative a căror sumă nu poate depăşi valoarea unu.
13

MANAGEMENTUL TRAFICULUI RUTIER SI TELEMATICĂ RUTIERĂ
Pentru o imagine mai clară asupra datelor prelucrate, în anumite situaţii, este de preferat să
se lucreze cu frecvenţele cumulate. Astfel, în tabelul 2.1 s-au calculat frecvenţele cumulate în
sens crescător fΣ> şi descrescător fΣ<. Aceste frecvenţe sunt reprezentate grafic în figura 2.2.
Curbele frecvenţelor cumulate permit stabilirea rapidă ale unor caracteristici ale datelor
analizate. Astfel, de exemplu, cu ajutorul curbei cumulate în sens descrescător fΣ< poate fi
evaluată probabilitatea ca într-un interval să sosească mai mult de x autovehicule. Aceste
curbe pot fi construite atât pentru variabilele aleatoare discrete cât şi pentru cele continui, ele
având utilitare la stabilirea funcţiilor de repartiţie teoretică a mărimilor care intervin în teoria
traficului rutier.
Ca o definiţie generală, mulţimea valorilor ordonate ale variabilei aleatoare X puse în
corespondenţă cu probabilităţile corespunzătoare reprezintă distribuţia variabilei X.
Legea care dă probabilitatea ca variabila aleatoare să ia o anumită valoare xi (din mulţimea
valorilor posibile) se numeşte lege de distribuţie a probabilităţii sau, pe scurt, distribuţia
P(xi)=P(X=xi).
O variabilă aleatoare poate fi descrisă printr-un tablou de valori:
⎟⎟⎠
⎞⎜⎜⎝
⎛=
n21
n21
pppxxx
X......
, (2.1)
cu pi≥0, oricare ar fi i şi . 2.2) 1pn
1ii =∑
=
Pentru a afla care este probabilitatea ca variabila aleatoare să ia o valoare mai mică sau
egală cu o anumită valoare x, respectiv: P(X≤ x), vom defini funcţia: F(X)=P(X ≤ x)=∑ P(xi),
cu xi ≤ x, numită funcţie de repartiţie.
Dacă probabilităţile sunt egale, această distribuţie poate să apară ca în figura 2.3.
În cazul variabilelor discrete funcţiile de repartiţie sunt funcţii în trepte, figura 2.4. Funcţia:
( ) ( ) ( )ixx
xPxXPxFi
∑≤
=≤= , cu xi≤ x (2.3)
Figura 2.3. Distribuţia în cazul probabilităţilor egale.
Figura 2.4. Funcţia de repartiţie în cazul probabilităţilor egale.
14

MANAGEMENTUL TRAFICULUI RUTIER SI TELEMATICĂ RUTIERĂ
este funcţia cumulată în sens crescător.
Funcţia,
F(x)=P(X≥x)= ( )∑≥xx
ii
xP cu xi≥ x, (2.4)
este o funcţie cumulată în sens descrescător (figura 2.5).
2.3. VARIABILE ALEATOARE DE TIP CONTINUU În acest caz variabila aleatoare poate lua un continuu de valori.
În teoria traficului rutier variabile de tip continuu pot fi intervalele în timp sau spaţiu dintre
vehicule, vitezele autovehiculelor, etc.
Se numeşte densitate de probabilitate fX(x), funcţia dF/dx unde F este de asemenea funcţia
de repartiţie. Deci,
Figura 2.5. Funcţie cumulată în sens descrescător (a) şi crescător (b)
fX(x) = dF(x)/dx, cu fX(x).dx ≥ 0, (2.5)
ceea ce reprezintă o probabilitate.
Rezultă:
( ) ( )dxxfxFx
X∫∞−
= , (2.6)
iar,
( ) ( ) ( ) 12
x
xX21 xFxFdxxfxXxP
2
1
−==≤≤ ∫ , ( ) (2.7)
deci,
( ) 1dxxfX =∫+∞
∞−
, (2.8)
similar condiţiei . 1pn
1ii =∑
=
15

MANAGEMENTUL TRAFICULUI RUTIER SI TELEMATICĂ RUTIERĂ
Densitatea de probabilitate este o funcţie ce nu poate fi negativă care, pentru valori infinite
ale argumentului, trebuie să tindă spre zero. Trebuie interpretată cu grijă; ea reprezintă
probabilitatea măsurării unei valori x în intervalul ∆x=x2-x1. În orice măsurare, vor fi
observate câteva valori ale lui x, deci aria totală de sub curba densităţii de probabilitate este
unitară, iar probabilitatea măsurării de 100%.
2.4. CARACTERISTICILE DE BAZĂ ALE VARIABILELOR ALEATOARE Atunci când se studiază anumite caracteristici ale fluxurilor de autovehicule, se obţin, prin
observaţii, date cu privire la caracteristicile respective. Parametrii traficului rutier sunt
variabile aleatoare pentru care, chiar dacă nu se cunosc funcţiile de repartiţie, sunt necesari
anumiţi indicatori, anumite “măsuri” ale tendinţelor acestor variabile.
Orice variabilă aleatoare este descrisă de următoarele caracteristici de bază:
1. Tendinţa centrală. Este punctul în jurul căruia se grupează valorile variabilei aleatoare
respective. Măsurile acestei caracteristici sunt:
• Valoarea medie teoretică. Este definită, pentru cele două tipuri de variabile aleatoare
astfel:
-pentru variabile discrete:
( ) ∑=
=n
1iii pxXM . (2.9)
-pentru variabile continui:
( ) ( )dxxxfXM X∫+∞
∞−
= . (2.10)
• Valoarea medianei teoretice, pentru care avem:
( )21XF meX = sau ( ) ( )
21dxxfdxxf
me
me
XX
X
X == ∫∫+∞
∞−
. (2.11)
Figura 2.6. Poziţia celor trei indicatori (moda, mediana şi media) pentru trei tipuri de repartiţii: a) - repartiţie cu asimetrie de dreapta; b) - repartiţie
simetrică; c) - repartiţie cu asimetrie de stânga.
16

MANAGEMENTUL TRAFICULUI RUTIER SI TELEMATICĂ RUTIERĂ
Geometric, reprezintă proiecţia pe axa Ox a intersecţiei între dreapta y=1/2 şi curba
y=FX(x). Xme împarte aria cuprinsă sub graficul funcţiei de distribuţie în două părţi egale.
• Moda, notată Xmo este punctul în care probabilitatea, în cazul variabilelor de tip discret,
sau densitatea de probabilitate, în cazul variabilelor de tip continuu, are valoare maximă.
În cazul variabilelor de tip continuu avem:
( ) 0Xf moX =′ şi ( ) 0Xf moX <′′ . (2.12)
Cum ecuaţia fX(x)=0 poate avea una sau mai multe soluţii, vom avea una sau mai multe
valori maxime ale densităţii de probabilitate, astfel încât, repartiţia poate fi unimodală sau
multimodală. Poziţia celor trei indicatori poate fi urmărită în figura 2.6.
Trebuie menţionat că pentru variabile aleatoare discrete, mediana se defineşte analog,
dar înlocuind semnul integrală cu semnul sumă, iar moda este acea valoare pentru care
probabilitatea este maximă.
2. Momente.
• Momentul teoretic necentrat de ordinul k. Este definit de relaţia:
( ) ( )dxxfxXMM Xkk
k ∫+∞
∞−
== . (2.13)
Momentul teoretic necentrat de ordinul întâi este tocmai media. Celelalte momente
necentrate nu prezintă importanţă pentru traficul rutier.
• Momentul teoretic centrat de ordinul k. Este definit pentru cele două tipuri de variabile
astfel:
-pentru variabile de tip discret:
( ) ( )[ ] ik
ii
kk pXMxXDD ∑ −== . (2.14)
-pentru variabile de tip continuu:
( ) ( )[ ] ( )[ ] ( )dxxfXMxXMXMXDD X
kkk
k ∫+∞
∞−
−=−== , (2.15)
Momentul teoretic centrat de ordinul întâi, D1 este nul. O importanţă deosebită o are
momentul teoretic centrat de ordinul doi, notat D2 sau D2(X), cunoscut sub numele de
dispersie. Valorile dispersiei pentru cele două tipuri de variabile au relaţiile:
-pentru variabile discrete:
( )[ ]2
iiii
i
2i
22 pxpxXMXMD ⎟
⎠
⎞⎜⎝
⎛−=−= ∑∑ (2.16)
-pentru variabile continui:
17

MANAGEMENTUL TRAFICULUI RUTIER SI TELEMATICĂ RUTIERĂ
( )[ ] ( ) ( )∫ ∫∞+
∞−
∞+
∞−⎟⎟⎠
⎞⎜⎜⎝
⎛−=−=
2
XX22
2 dxxxfdxxfxXMXMD (2.17)
Se poate constata că, dispersia sau momentul teoretic centrat de ordinul doi, reprezintă
diferenţa dintre momentul necentrat de ordinul al doilea şi pătratul momentului necentrat de
ordinul întâi, sau mediei.
Legat de dispersie se defineşte abaterea standard, care reprezintă rădăcina pătrată a
dispersiei şi exprimă precizia de măsurare a parametrilor traficului rutier.
• Momentul centrat de ordinul al treilea D3 este important pentru a defini simetria unei
repartiţii:
( )[ ] ( ) ( ) ( ) ([ 22333 XM2XMXM3XMxMXMD +−=−= )] . (2.18)
Indicatorul β1 măsoară asimetria unei repartiţii în raport cu gradul ei de împrăştiere şi se
numeşte coeficient de asimetrie,
( )[ ] 232
31
XD
D=β . (2.19)
Astfel în figura 2.7 se poate observa că pentru repartiţiile simetrice β1=0, pentru repartiţiile
cu asimetrie dreapta, β1>0, iar pentru repartiţiile cu asimetrie de stânga, β1<0.
Momentul centrat de ordinul al patrulea este dat de relaţia:
( )[ ] ( ) ( ) ( ) ( ) ( )[ ] ( )[ ]4223444 XM3XMXM6XMXM4XMXMXMD −+−=−= (2.20)
şi este legat de ascuţirea unei repartiţii. Indicatorul β2 este o măsură a excesului unei repartiţii.
El se numeşte coeficient de exces.
( )[ ]224
2XD
D=β (2.21)
Pentru a putea spune că o repartiţie este mai ascuţită
decât alta este necesar să existe o repartiţie de bază cu care
să se efectueze comparaţia. Această repartiţie “etalon” este
cea normală, pentru care β2=3. O repartiţie cu β2<3 este mai
turtită decât cea normală, iar o alta cu β2>3 este mai ascuţită
decât cea normală.
Coeficientul de variaţie, reprezintă o mărime cantitativă adimensională determinată ca raportul dintre abaterea standard şi media variabilei aleatoare.
XCFigura 2.7.Repartiţii statistice cu diferiţi coeficienţi de exces.
18

MANAGEMENTUL TRAFICULUI RUTIER SI TELEMATICĂ RUTIERĂ
xC X
Xσ
= (2.22)
sau exprimat în procente,
[%]100x
C XX ⋅
σ= (2.23)
În cazul în care coeficientul de variaţie se poate calcula ca raport între abaterea medie liniară şi media variabilei aleatoare,
[%]100xdC'
X ⋅= , (2.24)
iar raportul între cei doi coeficienţi de variaţie este
100xd100
xX ⋅>⋅
σ . (2.25)
Coeficientul de variaţie, indiferent de relaţia de calcul poate lua valori între 0 – 100%. Pentru valoarea zero, toate valorile caracteristicii fiind egale între ele şi respectiv cu valoarea medie, variabila aleatoare descrie un fenomen omogen şi datele sunt bine grupate.
Valorile caracteristicii prezintă un grad ridicat de omogenitate pentru valori ale
coeficientului de variaţie mai mici de 35%, iar pentru valori mai mari de 70 - 75%
variaţia este foarte mare, media nu este semnificativă şi nu caracterizează seria de date
analizate.
2.5. ELEMENTE DE TEORIA ESTIMAŢIEI O variabilă aleatoare se consideră determinată dacă este cunoscută mulţimea valorilor x
ale argumentului şi funcţia de probabilitate sau densitatea de probabilitate ,
după cum variabila este discretă sau continuă. Funcţia sau se poate realiza în
diverse moduri:
)(xpi )(xfX
)(xpi )(xfX
-Cu ajutorul teoriei probabilităţilor se stabileşte schema probabilistică în care se încadrează
caracteristica studiată şi prin raţionament se determină expresia analitică a funcţiei sau
. Acestea sunt repartiţiile teoretice, de exemplu repartiţiile: binomială, Poisson,
geometrică, exponenţială, normală etc.
)(xpi
)(xfX
-Se înregistrează sub formă de frecvenţe, valorile caracteristicii studiate pentru fiecare
valoare a argumentului, când variabila este discretă, sau pe intervale convenabile, când
variaţia este continuă, obţinându-se tabele numerice. Astfel de repartiţii se obţin în probleme
concrete prin experienţe şi, de aceea, se numesc empirice.
Încadrarea unei repartiţii empirice într-o schemă probabilistică cu o anumită repartiţie
teoretică corespunde descoperirii unei legităţi de desfăşurare a caracteristicii studiate. Dacă se
19

MANAGEMENTUL TRAFICULUI RUTIER SI TELEMATICĂ RUTIERĂ
cunoaşte modelul matematic al legii respective, se pot soluţiona uşor variantele problemelor
puse de practică.
Fie, cunoscută, variabila aleatoare X cu repartiţia empirică, dată prin frecvenţele absolute:
∑=
=⎟⎟⎠
⎞⎜⎜⎝
⎛ n
1ii
n21
n21 NNNNNxxx
X ;;...,,,...,,,
(2.26)
sau prin frecvenţele relative (probabilităţile):
∑=
==⎟⎟⎠
⎞⎜⎜⎝
⎛ n
1i
iii
n21
n21
NNp1p
pppxxx
X ;;...,,,...,,,
. (2.27)
Se ataşează variabila aleatoare X ′ cu distribuţia teoretică:
⎥⎦
⎤⎢⎣
⎡′
)(xfx
XX
. (2.28)
Presupunând că cele două variabile aleatoare X şi X ′ sunt identice, se determină funcţia
a repartiţiei teoretice, astfel ca: )(xfX
n21ipxf iX ,...,,,)( == . (2.29)
Funcţia depinde de anumiţi parametri )(xfX m21jaj ,...,,, = , adică are forma:
),...,,;( m21X aaaxf , (2.30)
astfel, sistemul se scrie:
n21ipaaaxf im21X ,...,,;),...,,,( == , (2.31)
şi devine un sistem de n ecuaţii cu m necunoscute, în care, practic, numărul ecuaţiilor este
mult mai mare decât cel al necunoscutelor. Problema care se pune este de a determina care
este acea valoare a parametrului pentru care există probabilitatea maximă de realizare.
Această problemă de calcul aproximativ se numeşte estimarea parametrilor.
După estimarea parametrilor repartiţiei teoretice se dispune de două variabile aleatoare:
-variabila aleatoare cu repartiţia empirică:
∑=
=⎟⎟⎠
⎞⎜⎜⎝
⎛ n
1ii
n21
n21 NNNNNxxx
X ;;...,,,...,,,
-variabila aleatoare cu repartiţia teoretică:
∑=
=′⎟⎟⎠
⎞⎜⎜⎝
⎛′′′
′n
1ii
n21
n21 NNNNNxxx
X ;;...,,,...,,,
(2.32)
construită cu frecvenţele , n21iNi ,...,,, =′ ii pNN ⋅=′ .
unde:
Ni- numărul valorilor din clasa Si ,
20

MANAGEMENTUL TRAFICULUI RUTIER SI TELEMATICĂ RUTIERĂ
N- numărul total de valori,
n- numărul claselor Si.
Figura 2.8. Reprezentarea grafică a criteriului χ2
Practic cele două repartiţii se deosebesc una de alta. Problema care se pune este de a stabili
dacă deosebirea dintre cele două variabile este întâmplătoare, semnificativă sau nu. Pentru a
soluţiona această problemă, se utilizează mai multe criterii de testare statistică. Dintre
acestea, cel mai utilizat în teoria traficului rutier este criteriul Hi-pătrat (χ2) care se poate
aplica datelor grupate.
Pentru aplicarea acestui criteriu se determină valoarea lui χ2, dată de suma abaterilor
frecvenţelor empirice faţă de frecvenţele teoretice la pătrat, raportate la frecvenţele teoretice:
( ) NNN
NNN n
1i i
2i
n
1i i
2ii2 −
′=
′′−
= ∑∑==
χ . (2.33)
Criteriul χ2 are reprezentarea grafică din figura 2.8. care, aşa cum se poate observa,
depinde de valoarea ν a gradelor de libertate.
Graficul este caracterizat de următoarele caracteristici:
• Aria de sub curbă este egală cu unitatea;
• Valoarea de început este χ2=0.
Curba nu este simetrică; când ν (deci numărul observaţiilor) creşte, curba devine similară
cu cea normală.
Noţiuni de bază
• Frecvenţă absolută, Ni, numărul valorilor înregistrate într-un interval;
21

MANAGEMENTUL TRAFICULUI RUTIER SI TELEMATICĂ RUTIERĂ
• Frecvenţă relativă, fi ,reprezintă raportul între frecvenţa absolută Ni şi numărul total al
observaţiilor;
• Eroare admisă, ε, diferenţa dintre valoarea măsurată şi valoarea adevărată, încadrată între
anumite limite;
• Intervalul de încredere este intervalul pentru pentru care poate fi estimată probabilitatea p
prin frecvenţa relativă:
εα +<<− pnxp .
• Indice de încredere (α) sau coeficient de siguranţă, este definit de probabilitatea minimă
ca frecvenţa relativă să se afle în intervalul de încredere:
δαε −=≥⎟⎟⎠
⎞⎜⎜⎝
⎛<− 1p
nxP . (2.34)
• Pragul de siguranţă (δ) reprezintă probabilitatea maximă ca frecvenţa relativă să nu
aparţină intervalului de încredere:
δε <⎟⎟⎠
⎞⎜⎜⎝
⎛>− p
nxP . (2.35)
• Deviaţia standard, d, a unei componente a variabilei aleatoare X reprezintă depărtarea lui
x faţă de valoarea medie M(X), se aproximează cu inegalitatea Bienayme - Cebîşev:
( ) 2
2 XD1XMxPε
ε )()( −≥<− (2.36)
• Numărul gradelor de libertate: 1ln −−=ν , unde
n - este numărul intervalelor de grupare (numărul claselor Si ),
l - numărul parametrilor repartiţiei teoretice.
Dacă repartiţia este binomială sau Poisson, distribuţii care au un singur parametru
atunci l = 1 şi 2n11n −=−−=ν grade de libertate.
Dacă însă legea este normală, care are doi parametri, atunci l = 2 şi
312 −=−−= nnν grade de libertate.
Deci, numărul gradelor de libertate este o noţiune statistică strâns legată de cantitatea de
informaţie de care se dispune în cercetarea care se efectuează.
Se recomandă pentru aplicarea testului χ2, ca N≥50, Ni≥5 şi 10 ≤ n ≤ 20.
Când clasele extreme au mai puţin de cinci elemente ele se contopesc cu cele alăturate
şi numărul υ scade corespunzător ( 3n −=ν ). Dacă numai o clasă se contopeşte cu cea
22

MANAGEMENTUL TRAFICULUI RUTIER SI TELEMATICĂ RUTIERĂ
alăturată atunci 2n −=ν . În situaţia când toate clasele au mai mult de cinci elemente
atunci 1n −=ν .
Eficienţa testului creşte când în fiecare clasă se află aproximativ acelaşi număr de date. Testul
are o mai mare putere de discriminare în cazul repartiţiilor simetrice şi dă rezultate bune în
cazul verificării normalităţii repartiţiilor empirice normale.
Tabelul 2.2. prezintă valorile χ2 pentru un anumit prag de siguranţă δ.
Aplicarea criteriului χ2 pentru un anumit prag de siguranţă δ, se reduce a verifica dacă:
δχχ −=< 1P 20
2 )( ,
unde , este valoarea care se adoptă din tabelul 2.2. pentru numărul gradelor de libertate ν,
adoptat anterior.
20χ
Figura 2.9. Variaţia lui χ2 pentru α = 0,05 şi α = 0,95
Dacă , se consideră că între repartiţia empirică şi cea teoretică există concordanţă
cu coeficientul de încredere
20
2 χχ <
δα −= 1 .
Figura 2.9 prezintă variaţia lui χ2 în funcţie de ν pentru α = 0,05 şi α = 0,95.
Figura 2.9. este divizată în 3 arii notate I, II, III.
Valorile “căzute” în aria I indică o concordanţă excepţională a datelor, încât ne putem
îndoi de faptul că ele sunt aleatoare.
23

MANAGEMENTUL TRAFICULUI RUTIER SI TELEMATICĂ RUTIERĂ
Aria III include valori ale lui χ2, care corespund discrepanţelor între valorile teoretice şi
cele experimentale. Când valorile lui χ2, ”cad” în această arie se constată o nepotrivire între
experiment şi teorie.
Dacă valoarea lui χ2 cade în aria II tinzând spre aria I, atunci există dovezi rezonabile că
probele testului sunt compatibile. Valorile care tind spre regiunea III indică concordanţa
îndoielnică a datelor.
Valorile χ2 pentru un anumit prag de siguranţă δ - Tabelul 2.2
ν 2995,0χ 2
99,0χ 2975,0χ 2
95,0χ 205,0χ 2
025,0χ 201,0χ 2
005,0χ ν 1 2 3 4 5
6 7 8 9
10
11 12 13 14 15
16 17 18 19 20
21 22 23 24 25
26 27 28 29 30
0,000 0,010 0,072 0,207 0,412
0,676 0,989 1,344 1,735 2,156
2,609 3,074 3,565 4,075 4,601
5,142 5,697 6,265 6,844 7,434
8,034 8,643 9,260 9,886
10,520
11,160 11,808 12,461 13,121 13,787
0,000 0,020 0,115 0,297 0,554
0,872 1,239 1,646 2,088 2,558
3,053 3,571 4,107 4,660 5,229
5,812 6,408 7,015 7,633 8,260
8,897 9,542
10,196 10,856 11,524
12,198 12,879 13,565 14,256 14,953
0,001 0,051 0,216 0,484 0,831
1,237 1,690 2,180 2,700 3,247
3,816 4,404 5,009 5,629 6,262
6,908 7,564 8,231 8,907 9,591
10,283 10,982 11,689 12,401 13,120
13,844 14,573 15,308 16,047 16,791
0,004 0,103 0,352 0,711 1,145
1,635 2,167 2,733 3,325 3,940
4,575 5,226 5,892 6,571 7,261
7,962 8,672 9,390
10,117 10,851
11,591 12,338 13,091 13,848 14,611
15,379 16,151 16,928 17,708 18,493
3,841 5,991 7,815 9,488
11,070
12,592 14,067 15,507 16,919 18,307
19,675 21,026 22,362 23,685 24,996
26,296 27,587 28,869 30,144 31,410
32,671 33,924 35,172 36,415 37,652
38,885 40,113 41,337 42,557 43,773
5,024 7,378 9,348
11,143 12,832
14,449 16,013 17,535 19,023 20,483
21,920 23,337 24,736 26,119 27,488
28,845 30,191 31,526 32,852 34,170
35,479 36,781 38,076 39,364 40,646
41,923 43,194 44,461 45,722 46,979
6,635 9,210
11,345 13,277 15,086
16,812 18,475 20,090 21,666 23,209
24,725 26,217 27,688 29,141 30,578
32,000 33,409 34,805 36,191 37,566
38,932 40,289 41,638 42,980 44,314
45,642 46,963 48,278 49,588 50,892
7,879 10,597 12,838 14,860 16,750
18,548 20,278 21,955 23,589 25,188
26,757 28,300 29,819 31,319 32,801
34,267 35,718 37,156 38,582 39,997
41,401 42,796 44,181 45,558 46,928
48,290 49,645 50,993 52,336 53,672
1 2 3 4 5
6 7 8 9
10
11 12 13 14 15
16 17 18 19 20
21 22 23 24 25
26 27 28 29 30
2.6. LEGI DE DISTRIBUŢIE DISCRETE
2.6.1. Distribuţia binomială
Din dezvoltarea binomului lui Newton (p+q)n, unde n este un număr întreg, rezultă:
24

MANAGEMENTUL TRAFICULUI RUTIER SI TELEMATICĂ RUTIERĂ
( ) ( )( xnx
n
0x
n qpxnx
nqp −
=∑ −
=+!!
! )
)
. (2.37)
Coeficienţii acestei dezvoltări se numesc binomiali şi pot fi exprimaţi astfel:
( !!!
xnxnC x
n −= . (2.38)
Dacă n trebuie să fie număr întreg, mărimile p şi q nu pot fi limitate decât de relaţia:
1qp =+ (2.39)
Dacă se analizează o succesiune de probe independente, p este probabilitatea ca fenomenul
să se producă după efectuarea probei, iar q este probabilitatea ca fenomenul să nu se producă.
Caracteristicile de bază ale distribuţiei binomiale - Tabelul 2.5
Caracteristica Notaţie Relaţia de calcul Observaţii
( ) ( ) xnxxn p1pCxXP −−⋅⋅==
Media ( ) xXM ≡ pn ⋅
Dispersia ( ) 2X2
2 DXD σ≡≡ ( )p1pn −⋅⋅
Abaterea standard ( ) XXD σ≡ ( )p1np −
Coeficientul de variaţie XC
( )np
p1np −
Eroarea standard ε NXσ
=ε
Numărul observaţiilor pentru o eroare impusă
N 2
2XN
εσ
=
( ) ( )XDXM 2> Determinarea
parametrilor p şi n cunoscând media şi
dispersia
⎪⎪⎩
⎪⎪⎨
⎧
σ−=
σ−=
2X
2
2X
xxn
xxp
Fiecare membru al dezvoltării binomiale din relaţia (2.42) este o probabilitate, iar relaţia
care dă distribuţia binomială este:
( ) 1qpqpCP xnxxnxX =+= −
= , , (2.40)
unde: p- probabilitatea rezultatului favorabil al unei probe date;
q- probabilitatea rezultatului nereuşit al unei probe date;
n- numărul probelor independente;
x- numărul probelor favorabile;
P(X=x) - probabilitatea apariţiei a x rezultate favorabile.
Caracteristicile de bază ale acestei distribuţii se pot găsi în tabelul 2.5.
25

MANAGEMENTUL TRAFICULUI RUTIER SI TELEMATICĂ RUTIERĂ
2.6.2. Distribuţia Poisson
Când, în urma cercetărilor experimentale se obţine media egală cu dispersia, se recomandă
folosirea distribuţiei Poisson. Această distribuţie este descrisă pornind de la baza logaritmului
natural e şi de la distribuţia binomială, pentru care p+q=1, deci şi (p+q)n=1. Se obţine:
,...,,,!
)( 210xx
exXPx
===− λλ
(2.41)
Distribuţia Poisson este reprezentată în figura 2.10 şi poate descrie sosirea autovehiculelor
într-un punct.
Figura 2.10: Distribuţia Poisson
Caracteristicile de bază sunt prezentate în tabelul 2.6.
Tabelul 2.6. Caracteristicile distribuţiei Poisson
Caracteristica Notaţie Relaţia de calcul Observaţii
( )!xexXP
x λ−⋅λ==
Media ( ) xXM ≡ λ
Dispersia ( ) 2X2
2 DXD σ≡≡ λ
Abaterea standard ( ) XXD σ≡ λ
Coeficientul de variaţie XC
λλ
=λ
1
Eroarea standard ε NXσ
=ε
Numărul observaţiilor N
2
2XN
εσ
=
( ) ( )XDXM 2= Determinarea
parametrilor p şi n cunoscând media şi
dispersia 2Xx σ==λ
26

MANAGEMENTUL TRAFICULUI RUTIER SI TELEMATICĂ RUTIERĂ
2.6.3. Distribuţia binomial-negativă
Se poate constata faptul că, din cercetările experimentale asupra sosirilor într-un punct,
legea cel mai des verificată este distribuţia binomial negativă, reprezentată grafic în figura
2.11.
Figura 2.11: Distribuţia binomial negativă
Numărul evenimentelor fiind x=n-k, probabilitatea apariţiei a x evenimente va fi: xkk
kx qpCxXP 11)( −
−+== , (2.42)
mxm1m1x qpCxXP −−
−== )( , mx ≥ . (2.42.a)
În particular, se obţine distribuţia geometrică, cu valorile caracteristice, media şi dispersia,
din tabelul 2.7, obţinute pentru k=1.
Tabelul 2.7. Caracteristicile distribuţiei binomial-negative Caracteristica Notaţie Relaţia de calcul Observaţii
( ) ( )xk1k1kx p1pCxXP −⋅⋅== −
−+
Media ( ) xXM ≡ ( )
pp1k −
Dispersia ( ) 2X2
2 DXD σ≡≡ ( )
2pp1k −
Abaterea standard ( ) XXD σ≡ ( )p1kp1
−
Coeficientul de variaţie XC ( )p1k
1−
Eroarea standard ε NXσ
=ε
Numărul observaţiilor N
2
2XN
εσ
=
( ) ( )XDXM 2< Determinarea
parametrilor p şi n cunoscând media şi dispersia
⎪⎪⎩
⎪⎪⎨
⎧
−σ=
σ=
xxk
xp
2X
2
2X
27

MANAGEMENTUL TRAFICULUI RUTIER SI TELEMATICĂ RUTIERĂ
2.7. LEGI DE DISTRIBUŢIE DE TIP CONTINUU Pot fi enumerate legile de distribuţie prezentate în tablelul 2.8:
Tabelul.2.8: Caracteristicile de bază ale distribuţiilor de tip continuu
Distribuţia Densitatea de probabilitate Media Dispersia
Uniformă ( )⎪⎩
⎪⎨⎧
><
≤≤−=
bxax0
bxaab
1xfX
;,
, 2
ab + ( )12
ba 2−
Normală ( )2mx
21
X e2
1xf⎟⎟⎠
⎞⎜⎜⎝
⎛ −−
= σ
πσ m σ2
Gama ⎪⎩
⎪⎨⎧
<⋅
≥⋅Γ=
−−
0xpentru0
0xpentruexab
1xf
bx
1aa
X
,
,)()(
∫∞
−−=Γ0
x1a dxexa)(
ab ab2
Gama generalizat (Pearson
III)
( ) ( ) ( )cxb1aa
X ecxa
bxf −−−−Γ
=)(
c
ba
+ 2ba
Beta
( )⎪⎩
⎪⎨⎧
><
≤−=
−−
1xx0pentru0
0pentrux1xba
1xf
1b1a
X
;,,
,),()( β
( )
)()().(),(:
;,;),(
bababasau
0qpdxx1xba1
0
1b1a
+ΓΓΓ
=
>−= ∫ −−
β
β
baa+
1ba1ba
ab2
++
×+ )(
Beta generalizat (Pearson I)
( ) ( )( )
21
1ba12
1b2
1a1
X
cxcccba
xccxxf
<<
−−−
= −+
−−
),()(
β baacbc1
++
1baab
bacc 2
12
++
⎟⎠⎞
⎜⎝⎛
+−
28

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
3. CARACTERISTICILE PARTICIPANŢILOR LA TRAFIC
3.1. NOŢIUNI GENERALE PRIVIND FACTORUL UMAN
Cunoaşterea performanţelor, aptitudinilor şi caracteristicilor oamenilor constituie
elemente esenţiale pentru înţelegerea modului în care, comportamentul lor, poate fi influenţat.
Astfel, ingineria de trafic se loveşte de aspecte diverse privind controlul fluxurilor rutiere,
control posibil doar prin modificarea comportamentului participanţilor la trafic. De exemplu,
semnalele şi semnele de circulaţie pot fi inutile dacă conducătorii auto nu le văd, nu le
interpretează, nu răspund şi nu se supun lor.
Operarea în siguranţă a sistemului rutier depinde, în consecinţă, în mod fundamental, de
utilizatorul drumului – conducător auto, biciclist sau pieton. Inginerul de trafic are un rol
important în asistarea utilizatorilor drumului, prin control şi informaţia de trafic oferită, într-o
astfel de manieră încât, decizia luată să fie corectă şi rapidă.
Termenul factor uman este folosit, în general, pentru a descrie studiul interacţiunii omului
cu procese şi obiecte, dar şi cu mediul natural sau mediul realizat de om. Este definit altfel,
termenul ergonomie (lb. greacă, ergon – muncă, nomos – ştiinţa) sau inginerie umană. Teoria
amintită oferă o rezolvare a proiectării raţionale a bunurilor şi serviciilor pe baza modelului
interacţiunii omului cu mediul de lucru şi a unui set de modele de măsurare şi evaluare
corespunzătoare acestuia.
Figura 3.1. Modelul om – maşină - spaţiu de lucru – mediu.
Modelul de bază, prezentat în figura 3.1 cuprinde patru componente principale:
• Om
• Maşină
29

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
• Spaţiu de lucru
• Mediu înconjurător
Termenul de maşină poate fi interpretat ca obiectul sau procesul, pe care omul îl foloseşte
pentru a realiza o problemă. Astfel, o maşină poate fi un automobil sau numai componentele,
o informaţie afişată pe un monitor într-un aeroport, un computer terminal. Modelul arată că
omul şi maşina interacţionează în scopul îndeplinirii sarcinii propuse. De exemplu, omul
poate să primească informaţia de la maşină prin intermediul monitoarelor şi să controleze
modul de operare al maşinii prin funcţii de control.
În timpul conducerii autovehiculului, conducătorul auto primeşte informaţii prin
observarea drumului, de la instrumentele aflate la bordul vehiculului, de la zgomotul produs
de componentele autovehiculului şi de la senzaţiile produse de mişcare şi vibraţii. Ca răspuns
la acestea, conducătorul procesează şi integrează informaţia şi foloseşte posibilităţile de
control pentru a modifica poziţia, viteza şi acceleraţia vehiculului. În acest exemplu,
interacţiunea om – vehicul este continuă şi bidirecţională, ca în figura 3.2. În alte cazuri,
interacţiunea este posibil să nu fie continuă şi nici bidirecţională. Este cazul călătorului cu
autobuzul care, primind informaţia pe cale vizuală de la orarul afişat, va procesa informaţia şi
va acţiona cumpărând un bilet, acţiune ce nu afectează orarul autobuzelor.
Figura 3.2. Modelul om – vehicul.
Spaţiul de lucru. În acest model se consideră că omul şi maşina vor acţiona în interiorul
unui spaţiu de lucru constatându-se modul în care caracteristicile acestui spaţiu afectează
eficienţa interacţiunii om – maşină. Spaţiul de lucru este definit în termeni ai dimensiunilor
fizice, a poziţiei individuale de lucru în raport cu mărimea corpului uman sau componentelor
sale.
Este foarte evident că proiectarea spaţiului de lucru afectează performanţele personale. De
exemplu, dacă o persoană conduce mai multe ore un automobil pe un scaun neconfortabil va
aprecia, ca importantă, proiectarea spaţiului de lucru în reducerea încordării muşchilor,
30

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
spatelui şi umerilor.
Mediul înconjurător. Aspectul final al modelului arată că subsistemul om – maşină –
spaţiu de lucru este localizat într-un mediu ce afectează performanţa individuală. În mod
tradiţional, mediul de lucru a fost înţeles şi măsurat prin caracteristicile fizice: iluminare,
sunet, vibraţie sau climat ca şi prin caracteristici biologice, chimice şi poluanţi radiologici.
Mai recent, la factorii de mediu s-au adăugat termenii de mediu psihologic şi mediu psiho-
social.
Specialiştii au constatat cum consecinţele psihologice ale sarcinilor de muncă, afectează
semnificativ performanţa îndeplinirii acestora. Ca un exemplu, structura organizatorică a unei
companii sau instituţii va afecta motivaţia, performanţa şi satisfacţia muncii lucrătorilor şi
contactele formale sau informale pe care le au cu colegii lor. Consecinţele psihologice, ca
stresul şi încordarea de la muncă, se pot transmite în viaţa de familie sau socială, dar şi asupra
comportamentului la volan sau ca pieton.
3.2. SISTEMUL TRAFICULUI RUTIER
Aşa cum s-a prezentat, sistemul traficului rutier poate fi analizat doar luând în considerare
cele patru sub-sisteme: omul, vehiculul (maşina), drumul(spaţiul de lucru) şi mediul
înconjurător. Acest sistem, inerent instabil, poate fi menţinut în echilibru numai prin
intervenţia omului (de obicei conducător al autovehiculelor, dar şi pieton şi biciclist).
Procesul conducerii autovehiculului se desfăşoară după modelul sistemului de reglare cu
contur închis sau cu reacţie inversă, prezentat în figura 3.3, în care semnalul de ieşire, c(t)
este comparat cu semnalul de intrare, b(t), iar abaterile de la performanţele dorite, e(t) sunt
corectate.
Funcţia de transfer, (T) a unui astfel de sistem reprezintă descrierea matematică a
raportului dintre mărimea de ieşire a unei componente şi mărimea de intrare a acesteia.
Figura 3.3. Schema bloc a sistemului de reglare corespunzător conducerii vehiculului.
Caracteristicile sistemului de reglare cu reacţie inversă din figura 3.3 pot fi exprimate cu
31

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
ecuaţiile următoare:
( ) ( ) ( ) ( )SCSHSRSE ⋅−= (3.1)
( ) ( ) ( )SGSESC ⋅= (3.2)
unde:
C(S) – transformata Laplace a mărimii de ieşire de referinţă;
E(S) – transformata Laplace pentru eroare;
G(S) – funcţia de transfer pentru calea directă;
H(S) – funcţia de transfer pentru reacţie;
R(S) – transformata Laplace a mărimii de intrare de referinţă.
Astfel, funcţia de transfer devine:
( ) ( )( )
( )( ) ( )SHSG1
SGSR
SGSET⋅+
=⋅
= (3.3)
Transformata Laplace a unei funcţii f(t), notată cu F(S), se calculează cu relaţia:
( ) ( )[ ] ( )∫∞ − ⋅⋅==
0
st dttfetfLSF (3.4)
Aplicaţiile transformatelor Laplace se referă mai ales la rezolvarea ecuaţiilor diferenţiale
cu variabila t.
Intrarea în sistem o reprezintă observarea drumului pe care se desfăşoară circulaţia în
ansamblu. Vitezometru reprezintă elementul de reacţie care furnizează informaţii cu privire la
ieşirea sistemului. Comenzile sunt reprezentate de volan (sistem de direcţie), pedala de
acceleraţie şi sistemul de frânare.
Conducătorul autovehiculului alege viteza de deplasare adecvată condiţiilor de circulaţie
(drum şi mediu), observă apoi viteza efectivă pe scala vitezometrului, compară mintal relaţia
dintre cele două viteze (cea dorită şi cea efectivă) şi decide: să accelereze, dacă viteza dorită
este inferioară celei efective sau să frâneze în caz contrar.
Organele de reglare sunt: volanul, pedala de acceleraţie şi pedala de frână. Efortul de
ieşire al acestor organe de reglare acţionează asupra autovehiculului, determinând deplasarea
lui, ceea ce constituie semnalul de ieşire al sistemului. Crearea unui sistem complex de
reglare „om – vehicul” necesită o analiză profundă a factorului uman. La studierea omului ca
element component al acestui sistem şi la încercarea de a-l descrie cu ajutorul unor funcţii de
transfer, s-a dovedit că operatorul funcţionează în mod analog cu un sistem de urmărire.
32

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
Particularităţile caracteristice ale funcţiei de transfer, T exprimată cu ecuaţia 3.4, sunt
determinate de funcţiile senzoriale (semnale percepute pe cale vizuală) şi reacţiile fizice (de
regulă acţiuni ale organelor de reglare).
3.3. OMUL - CONDUCĂTOR AUTO
3.3.1. Simţurile în conducerea autovehiculului
Conducerea în siguranţă a unui autovehicul presupune, pe lângă însuşirea unui volum de
cunoştinţe specifice circulaţiei rutiere, formarea deprinderilor de executare corectă a
manevrelor şi de rezolvare a situaţiilor de trafic.
Activitatea fizică şi mentală a conducătorului auto, determinată de interacţiunea sa cu
elementele sistemului circulaţiei rutiere, cuprinde următoarele cinci etape:
1. Sesizarea - capacitatea de a privi, vedea, observa şi culege informaţii.
2. Identificarea - legată imediat de sesizare - reprezintă capacitatea de a înţelege
semnificaţia evenimentelor de trafic sesizate şi legătura acestora cu propria persoană,
ca participant la situaţia de trafic.
3. Prevederea presupune desfăşurarea de raţionamente de tipul “dacă…atunci”, care
anticipează mental evoluţia evenimentelor şi constituie baza pentru elaborarea
variantelor comportamentale corespunzătoare situaţiei date.
4. Decizia este procesul psihic care determină alegerea unei variante comportamentale, ca
soluţie adecvată situaţiei concrete de trafic.
5. Execuţia – acţiunea propriu-zisă asupra comenzilor.
Toate aceste componente psihice ale activităţii de conducere se întrepătrund şi se
determină reciproc. Dacă una din componente nu este bine realizată, celelalte vor evolua în
aceeaşi direcţie, iar probabilitatea apariţiei unei situaţii periculoase sau a accidentului rutier
creşte. Cele cinci componente ale activităţii fizice şi mentale ale conducătorului auto au
proprietatea de a organiza activitatea psihică a acestuia, astfel încât propriile sale procese
psihice devin obiect de cunoaştere şi analiză.
Pentru a sesiza elementele importante care ar putea determina o schimbare în
comportamentul conducătorului auto, este necesar ca acesta să înveţe ce fel de informaţii sunt
necesare în trafic şi unde le găseşte. Aceste cunoştinţe nu vor fi însă de folos dacă organele
sale de simţ şi atenţia nu pot culege datele cu precizie şi în timp util.
33

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
În scopul stabilirii acestor elemente predominante, se impune ca conducătorul auto să
dispună de un volum de cunoştinţe care să-i permită identificarea rapidă a obiectelor şi a
fenomenelor, precum şi înţelegerea raporturilor lor cauzale. Existenţa unui volum mare şi
diversificat de cunoştinţe face posibilă anticiparea şi prevederea desfăşurării evenimentelor.
Decizia rapidă şi corectă presupune existenţa unui registru de soluţii corespunzătoare
diferitelor tipuri de situaţii caracteristice circulaţiei rutiere, la care conducătorul auto apelează
sub presiunea timpului. Decizia este eficientă în măsura în care conducătorul reuşeşte să
selecteze dintr-o mulţime de soluţii pe cea adecvată situaţiei în care se află. Această condiţie
se realizează tot ca efect al procesului de învăţare.
Obţinerea unei imagini clare, complete şi exacte asupra situaţiei traficului este posibilă
numai datorită simţurilor.
Simţurile pot fi utilizate în două moduri:
• în mod activ, atunci când conducătorul auto caută, urmăreşte, detectează informaţii,
• în mod pasiv, dacă aşteaptă să se întâmple, să vadă sau să audă ceva.
De exemplu, simţul vizual este indispensabil în activitatea de conducere, iar mirosul numai
atunci când în funcţionarea motorului, instalaţiei de frânare etc., se emană un miros de încins,
de ars.
Simţurile pot fi mai mult sau mai puţin solicitate în funcţie de informaţiile receptate;
eficienţa lor este invers proporţională cu gradul de solicitare. Aceasta se întâmplă, în general,
când două sau mai multe simţuri primesc, în acelaşi timp, informaţii de diverse categorii. De
exemplu, când un conducător auto observă venind din sens opus un autovehicul care deviază
de pe banda care se deplasează şi, concomitent, simte că se dezumflă un pneu, nu poate
reacţiona la fel de prompt la ambele situaţii.
Fiecare simţ are o anumită capacitate de cuprindere, deci este limitat, dar dacă acţionează
corect, conducătorul auto poate observa şi identifica orice situaţie din trafic
3.3.2. Sistemul senzorial
Partea centrală a sistemului nervos, conţinând miliarde de celule interconectate, este
localizată şi protejată de craniu şi coloana vertebrală. Interconectarea trebuie să se menţină la
toate nivelurile între aceste celule individuale - materia cenuşie - care sunt conectate
împreună cu fibrele lungi - materia albă. Diferitele zone ale scoarţei cerebrale au sarcini
specifice - vederea, memoria, coordonarea motorie, gust şi miros - şi prin conexiunile la
34

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
nivelul coloanei vertebrale, cu mişcarea mâinilor, trunchiului şi picioarelor.
Unitatea structurală a sistemului nervos este neuronul, constând dintr-o celulă şi fibrele de
legătură, cunoscute sub denumirea de dentrite şi axioni. Neuronii senzoriali preiau informaţia
de la celulele senzoriale şi o transmit din aproape în aproape prin intermediul sinapselor către
scoarţa cerebrală. La nivelul scoarţei cerebrale informaţia este procesată şi retransmisă
neuronilor motorii pentru executarea promptă şi corectă a comenzii.
Un reflex defineşte unitatea primară a activităţii unui sistem, iar răspunsul la un stimul al
percepţiei şi transmisiei unui semnal motor se numeşte arc reflex. Unele reflexe, cum ar fi
respiraţia şi clipirea sunt native, necondiţionate, dar altele sunt învăţate continuu,
condiţionate.
Ca în toate sistemele de comunicaţie, timpul de răspuns la stimuli este un element
important. Transmisia semnalelor senzoriale (biocurenţi de mică valoare) către - şi de la -
organele senzoriale, activează, de asemenea, celulele la nivelul proiecţiei corticale, unde este
cerută coordonarea şi evaluarea înainte ca răspunsul să fie indus în muşchi şi alte organe.
Tabelul 3.1. Timpul de răspuns pentru diferiţi stimuli.
Stimul Timp de răspuns, s Sunet Atingere Lumină
0,14 0,14 0,18
Timpul de răspuns, la apariţia unui stimul, depinde de categoria stimulului şi condiţiile de
apariţie, necesitând perioade de recunoaştere diferite, tabelul 3.1. Răspunsurile condiţionate la
situaţiile bine învăţate se reflectă în timpi de reacţie minimi întrucât, nu sunt cerute procese
cognitive superioare; situaţiile noi şi complexe sporesc timpul de analiză pe plan cognitiv,
conducând la timpi de răspuns de durată mai mare.
3.3.3.Calităţile optice ale conducătorilor de autovehicule
Un conducător percepe vizual acţiunile celorlalţi participanţi la trafic, localizează obiecte,
aparatura de control a traficului şi mediul înconjurător.
Văzul este cel mai important simţ folosit în timpul conducerii automobilului; este simţul
primar prin intermediul căruia, conducătorul auto, dobândeşte informaţiile şi imaginile,
necesare identificării traficului. Peste 90% din stimuli exteriori privind circulaţia rutieră sunt
recepţionaţi, de către conducătorul auto, pe cale vizuală, ceea ce arată importanţa posedării de
către acesta a tuturor componentelor funcţiei vizuale.
Ochii sunt organele văzului (fig. 3.4), constituind partea exterioară a sistemului vizual, ce
35

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
cuprinde doi nervi optici care formează calea de transmitere a informaţiei către proiecţia în
zona occipitală a cortexului. În fiecare secundă, aleargă spre creier 30 – 40 imagini noi, prin
intermediul nervului optic.
Figura 3.4. Globul ocular.
Experienţa acumulată anterior şi cunoştinţele teoretice pe care le posedă conducătorul
auto, folosesc la interpretarea corectă a imaginilor observate. Dacă structura imaginilor este
cunoscută, interpretarea stimulului este imediată, dacă imaginile nu sunt familiare, pot apărea
dificultăţi privind înţelegerea acelei structuri.
Capacitatea vizuală se caracterizează prin însuşirea ochiului de a percepe diferenţele de
strălucire, culorile şi detaliile de formă, prin agerimea şi mărimea câmpului vizual, precum şi
prin capacitatea de acomodare şi adaptare a ochiului.
Posibilitatea ochiului de a distinge cele mai mici detalii ale obiectelor este denumită
acuitate vizuală. În condiţii normale este nevoie de iluminarea obiectelor, iluminarea cu atât
mai intensă, cu cât dimensiunile acestora sunt mai mici, contrastul este mai scăzut, iar viteza
de succesiune mai mare.
Ochiul care poate percepe un obiect ce subîntinde un arc de un minut (1’) şi se află în
conul acut de vedere (100) este considerat că are vedere normală, figura 3.5. Ţinând seama de
această realitate, indicatoarele rutiere trebuie realizate astfel încât, inscripţiile să se afle în
interiorul acestui con al agerimii vizuale (fig. 3.6.).
O persoană este solicitată să citească litere de înălţimi diferite de la distanţe specificate.
Rezultatul testului este dat în raport cu o persoană cu vederea normală.
36

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
Figura 3.5. Câmpul vizual şi vederea binoculară.
Persoana cu vedere normală este cea care, în condiţii normale de mediu, poate identifica
litere de 8,5 mm înălţime, aflate pe un panou situat la o distanţă de 6 m, în condiţiile unei
luminozităţi medii. În acest caz, acuitatea vizuală este dată ca raportul 6/6.
Imaginea acestor obiecte se fixează pe retină fără ca ochiul să se acomodeze; obiectele
situate la o distanţă mai mică de 6 metri faţă de subiect implică un efort de acomodare a
ochiului; fenomenul constă în variaţia distanţei focale a cristalinului, prin modificarea
curburii “lentilei biconvexe cu geometrie variabilă” a ochiului.
Pentru a vedea aceleaşi litere, o persoană cu acuitate vizuală scăzută trebuie să fie mai
aproape sau, literele să fie la aceeaşi distanţă, dar de dimensiuni mai mari. O persoană cu
acuitate sporită 6/12, vede acelaşi obiect ca cel văzut de persoana cu vedere normală, de la o
distanţă de două ori mai mare.
Principalele vicii de refracţie ale cristalinului sunt următoarele:
• Miopia, când unghiul de refracţie este mai mare şi proiecţia imaginii se formează în
faţa retinei; miopia influenţează negativ capacitatea de conducere auto prin faptul că
obiectele aflate la distanţe mari (peste 6 m) nu pot fi văzute clar de şofer. Corectarea se
poate face cu ajutorul ochelarilor cu lentile concave.
37

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
• Prezbitismul, când unghiul de refracţie este mai mic şi proiecţia imaginii se formează
în spatele retinei. Prezbitismul constă în scăderea fiziologică a capacităţii de
acomodare la limita incompatibilă a vederii normale pentru aproape, prin pierderea
treptată a elasticităţii cristalinului şi a capacităţii acestuia de a-şi modifica curbura în
raport cu distanţele. Punctul cel mai apropiat pentru vederea distinctă se îndepărtează
de ochi. Pericolul distingerii deficitare a obiectelor aflate în apropiere se manifestă la
întâlnirea vehiculelor sau la evenimentele care survin în preajma conducătorului auto;
corectarea acestui defect se realizează cu ajutorul ochelarilor cu lentile convexe.
Prezbitismul îşi face apariţia frecvent prin îmbătrânire, când cristalinul îşi pierde
supleţea de variere a formei lenticulare.
• Astigmatismul, este un viciu de refracţie mai rar întâlnit, caracterizat de deformarea
neregulată a cristalinului, care conduce la perceperea deformată a obiectelor de către
conducătorul auto; corectarea necesită ochelari cu lentile cilindrice.
Acuitatea vizuală este afectată de factori cum ar fi: contrastul, strălucirea obiectelor,
nivelul de iluminare şi mişcarea relativă între observator şi obiect.
Acuitatea vizuală este statică în absenţa mişcării şi dinamică, când există mişcare relativă.
Acuitatea vizuală statică se poate măsura cu ajutorul diferitelor dispozitive de testare.
Acuitatea vizuală dinamică este importantă în obţinerea unei imagini clare în timpul
deplasării autovehiculului. Prin intermediul ei, conducătorii auto observă şi identifică cu
claritate semnalele, semnele şi indicatoarele rutiere. Din statistici rezultă că, conducătorii auto
care nu văd clar obiectele în mişcare, obţin rezultate nesatisfăcătoare în activitatea de
conducere, prezentând risc ridicat în ceea ce priveşte siguranţa circulaţiei.
Adaptarea, este una dintre cele mai importante proprietăţi ale ochiului dependentă de
intensitatea luminoasă sau de iluminarea obiectelor din câmpul vizual; ea se realizează prin
variaţia deschiderii irisului şi a sensibilităţii retinei.
Vederea diurnă, în care condiţiile de iluminare depăşesc minimum 30 lucşi, este
caracterizată de funcţionarea unor celule nervoase ale retinei, denumite conuri, care au o
sensibilitate mică la lumină, dar diferenţiază culorile.
Vederea nocturnă, când iluminatul este puţin intens, este caracterizată de funcţionarea
unor celule nervoase ale retinei, denumite celule cu bastonaşe, care sunt foarte sensibile la
diferenţele mici de iluminare, dar care nu disting culorile, prezentând imagini cenuşii.
Conducerea pe timp de noapte necesită iluminarea artificială a semnelor. În aceste condiţii
38

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
acuitatea scade, cu creşterea unghiului câmpului vizual, ilustrat în figura 3.5.
Sensibilitatea retinei, în procesul de adaptare la lumină, se modifică progresiv şi lent.
Adaptarea completă a ochiului la diferenţe mari de iluminare (adaptarea la întuneric) are loc
în aproximativ 20 minute; în primele 5 minute adaptarea se realizează în proporţie de 60%.
Apare deci, necesitatea unei perioade de adaptare destul de lungi, în situaţii în care se produc
variaţii puternice de iluminare. În această categorie se înscrie fenomenul de orbire ce se
manifestă prin alterarea supărătoare a sensibilităţii retinei, la apariţia bruscă a unui fascicul
luminos puternic în faţa ochiului adaptat la întuneric.
Situaţia este frecvent întâlnită în circulaţia rutieră pe timp de noapte, la întâlnirea a două
autovehicule iluminate cu faza lungă.
Impresionarea puternică a retinei produce descompunerea pigmentului (rodopsină)
acumulat în timpul adaptării ochiului, producându-se orbirea, fapt ce determină dispariţia
temporară a capacităţii vizuale.
Timpul critic de refacere parţială, dar strict necesară a capacităţii vizuale, este de circa 5
secunde. Mărimea acestui interval este factorul determinant ce trebuie să stea la baza stabilirii
distanţei de la care, conducătorii auto ai celor două autovehicule care se întâlnesc pe timp de
noapte, trebuie să se schimbe faza de drum cu faza de întâlnire. Capacitatea de adaptare la
întuneric scade cu înaintarea în vârstă, durata de adaptare completă a ochiului putându-se
dubla.
Sensibilitatea cromatică a ochiului este realizată de sisteme neuro – fizico – chimice, care
implică, în afară de celulele respective de pe retină, nervul optic şi scoarţa cerebrală.
Afectarea acestor sisteme induce o afecţiune denumită daltonism, de care suferă aproximativ
10% dintre bărbaţii, conducători auto, şi care afectează capacitatea de conducere a acestora
prin dificultăţi în perceperea culorilor roşu şi verde, deci, în anumite situaţii şi a culorilor
semafoarelor electrice.
Perceperea adâncimii reprezintă capacitatea ochiului de a estima corect distanţa relativă
a obiectelor, de a aprecia distanţa faţă de vehicule la mersul în spate, faţă de vehiculele care
circul din sens contrar şi faţă de cele depăşite.
Câmpul vizual este reprezentat de unghiul sferic ce poate fi cuprins de ochiul imobil şi
care se mai numeşte conul de vedere al ochiului. În plan, unghiul normal de vedere este
cuprins între 1200 – 1600. În centrul câmpului de vedere se află conul agerimii ochiului sau
conul acut de vedere, în jurul a 30, limita agerimii vizuale fiind un unghi de 100.Capacitatea
39

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
de a percepe obiecte aflate în afara conului agerimii ochiului este denumită vederea periferică
(vedere laterală), unghiul corespunzător acesteia fiind cuprins între 100 până la 1600. Valoarea
maximă a acestui unghi descreşte cu creşterea vitezei de deplasare a autovehiculului (fig. 3.6).
Figura 3.6. Influenţa vitezei de circulaţie asupra câmpului vizual.
Vederea centrală, obţinută în conul agerimii ochiului permite identificarea obiectelor
cuprinse în câmpul vizual, pe când, vederea periferică doar le detectează. Cu alte cuvinte,
vederea periferică se poate asemăna cu un dispozitiv de scanare, care permite selectarea
obiectelor peste care să se focalizeze privirea.
Zona vederii centrale rămâne mereu aceeaşi, pe când zona vederii periferice se reduce
proporţional cu creşterea vitezei de deplasare (fig. 3.6), conducătorul auto bazându-se, în
aceste situaţii, numai pe vederea corespunzătoare conului central.
Oboseala, alcoolul şi anumite medicamente pot reduce şi ele zona vederii periferice. La
deplasarea cu viteze foarte mari, practic obiectele din lateral nu mai au un contur clar,
justificându-se astfel interzicerea unor viteze de deplasare mari.
Reluarea controlului vizual al drumului, după o privire în afara conului de vedere axat pe
drum, necesită o perioadă de timp de 0,5 – 1,2 secunde, ceea ce influenţează siguranţa
circulaţiei rutiere. Acest timp de reacţie depinde de mărimea vitezei de percepere vizuală.
40

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
O altă componentă a capacităţii vizuale este stabilitatea vederii clare, care se manifestă
prin păstrarea permanentă şi clară, timp de peste 15 – 20 secunde, a imaginii unui obiect fix.
Ea este de mare importanţă pentru conducerea la drum lung, când oboseala oculară afectează
capacitatea de a fixa obiectele de pe calea rutieră.
De mare importanţă pentru capacitatea de conducere auto este vederea binoculară
componentă a funcţiei vizuale prin care se percepe profunzimea poziţiei obiectelor (vedere de
relief) şi se apreciază distanţa dintre obiect şi subiect, precum şi variaţia acestor distanţe (fig.
3.5). Funcţia se realizează prin suprapunerea – la nivelul scoarţei cerebrale – a celor două
câmpuri vizuale ale ochilor. Tulburările vederii binoculare conduc, în general, la afectarea
profundă a capacităţii de conducere auto.
3.3.4. Alte simţuri în conducerea autovehiculelor
Auzul este cel de-al doilea simţ important în activitatea de conducere auto. Sunetele pe
care le aude conducătorul auto îl alertează, punându-l “în gardă”, cu privire la natura şi
poziţia pe şosea a celorlalţi participanţi la trafic. Conducătorii auto care nu aud normal, pot
compensa această deficienţă prin folosirea eficientă a indicatorilor vizuali.
Mirosul este un alt simţ utilizat în timpul conducerii, care permite suplimentarea
informaţiilor privind desfăşurarea traficului, dar care, uneori, îl distrage pe conducătorul auto
de la conducerea autovehiculului (de exemplu, mirosul de benzină sau de ars).
Simţul tactil oferă semnale privind contactul cu volanul, pedalele de frână, ambreiaj şi
acceleraţie, manetele, comenzile de bord şi scaun. De simţul tactil depinde poziţia mâinilor pe
volan şi forţa de strângere a acestuia, modul de acţionare al pedalierului. De asemenea, prin
acest simţ, cei de la volan primesc informaţii cu privire la denivelările drumului, trepidaţiile
vehiculului, mersul neuniform al motorului, patinarea ambreiajului.
Semnalele kinestezice, iau naştere în cursul efectuării comenzilor, şi alcătuiesc
conexiunea inversă ce fac posibilă reglarea parametrilor de care, depinde finalizarea
mişcărilor. Nici un comportament orientat spre acţionarea unui obiect extern nu este posibil
fără executarea unor acte motorii fizice asupra obiectului respectiv.
Componentele motorii pot fii: involuntare (necondiţionate) şi voluntare - intenţionate sau
automatizate – putând fi regăsite în activitatea de conducere a automobilului. Cea mai
frecvent întâlnită este mişcarea voluntară, care se declanşează prin voinţa conducătorului
auto, ca o decizie de răspuns la diversele influenţe externe sau de a acţiona în vederea
atingerii unui anumit scop.
41

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
Centrul de comandă se situează la nivelul scoarţei cerebrale. Indicatorii după care se
evaluează o structură motorie sunt: timpul de reacţie sau perioada de latenţă; amplitudinea,
intensitatea sau forţa; forma, precizia, coordonarea, tempoul, ritmicitatea şi melodicitatea.
3.3.5. Timpul de percepţie – reacţie
Nimic în universul fizic nu se întâmplă instantaneu. În comparaţie cu procesele fizice sau
chimice, cea mai simplă reacţie umană - la primirea unei informaţii - este cât se poate de
lentă. La mijlocul secolului al XIX –lea psihologul olandez Donders a început să facă
presupuneri privind procesele implicate în alegerea şi recunoaşterea timpilor de reacţie şi, de
atunci, au fost dezvoltate numeroase modele. Prin anii 1950, teoria informaţiei a dobândit un
rol important în psihologia experimentală. Un prim model este ecuaţia liniară cunoscută sub
numele „Legea lui Hick-Hyman”:
Hbat ⋅+= (3.5)
unde:
t – timpul de reacţie, secunde;
H – estimarea informaţiei transmise;
H = log2 N, (3.6)
N - numărul alternativelor de probabilităţi egale;
a – timpul de reacţie minim pentru această modalitate;
b – coeficient determinat empiric, adoptat aproximativ 0,13 secunde pentru situaţiile cele
mai cunoscute.
Aceasta exprimă o corelaţie între numărul alternativelor care pot fi alese pentru a decide
un răspuns şi timpul total de reacţie, adică, ceea ce întârzie în timp detectarea unui impuls
(stimul) şi timpul de iniţiere a controlului sau un alt răspuns. Dacă timpul de răspuns este, de
asemenea, inclus, atunci întârzierea totală este numită „timp de răspuns”. De obicei, termenii
„timp de reacţie” şi „timp de răspuns” sunt interschimbabili, dar reacţia este totdeauna parte
a răspunsului.
În legea Hick-Hyman este esenţial conceptul celor două componente: o parte a timpului
total depinde de alegerea variabilelor, iar cealaltă este comună tuturor reacţiilor. În alegerea
componentei variabile, alta decât conţinutul informaţiei, pot fi considerate şi alte componente.
Întrucât au fost înlănţuite, componentele au fost considerate dependente sau independente
unele de celelalte. În 1983, Hooper şi McGee au enunţat un model reprezentativ şi plauzibil
42

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
cu componentele corespunzătoare timpului de răspuns la frânare, tabelul 3.2.
Tabelul 3.2: Modelul Hooper –McGee pentru timpul de răspuns în cazul frânării.
Componenta Timp, sec Timp cumulat, sec 1. Percepţia
Latenţa 0,31 0,31 Mişcarea ochilor 0,09 0,40 Fixare 0,20 1,00 Recunoaştere 0,50 1,50
2.Iniţierea frânării (reacţia) 1,24 2,74
Fiecare dintre aceste elemente derivă din date empirice şi deci 1,5 secunde este probabil o
limită superioară pentru timpul de percepţie-reacţie. Aceasta reprezintă o estimare pentru cel
mai simplu timp de reacţie cuprinzând o mică parte (sau chiar fără) timpul corespunzător
luării deciziei. Conducătorul reacţionează, la început, prin ridicarea piciorului de pe pedala de
acceleraţie şi plasarea lui pe pedala de frână.
În 1989, Neuman a propus valori ale timpului de percepţie-reacţie, pentru diferite
categorii de drumuri, în limitele 1,5 secunde pentru volumele de trafic scăzute la 3,0 secunde
pentru arterele rutiere urbane principale. Există numeroase aspecte care pot produce creşterea
numărului de decizii pe unitatea de timp, în cazul amenajărilor urbane aglomerate comparativ
cu cazul drumurilor rurale, atunci când nu este permisă circulaţia haotică a pietonilor,
bicicliştilor şi căruţelor.
3.3.6. Timpul de reacţie în manevrele rapide
Ecuaţiile care descriu mişcarea unui autovehicul, nu iau, în general, în considerare
influenţa performanţelor conducătorilor de autovehicule în descrierea mişcării.
Ecuaţia:
)f(g2vv
D22
of ϕ±
−= , (4.7)
cunoscută pentru calculul spaţiului de frânare minim până la oprirea totală a unui vehicul, nu
ia în considerare caracteristicile conducătorilor auto.
Notaţiile din relaţia precedentă au semnificaţia:
Df – spaţiu de frânare, m;
vo – viteza iniţială în momentul frânării;
v – viteza în momentul opririi;
f - coeficient de rezistenţă la rulare;
43

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
ϕ - coeficient de aderenţă.
În mod normal, conducătorul face o astfel de manevră, ca răspuns la un stimul, de
exemplu, sesizarea unui obiect pe drum. Când apare stimulul, conducătorul trebuie să
perceapă şi să înţeleagă, să ia decizia asupra răspunsului imediat şi să reacţioneze, acţionând
pedala de frână. Distanţa parcursă în acest interval, sau timpul, constituie doar o componentă
a spaţiului, respectiv timpului total de oprire. În multe aplicaţii această manevră se împarte în
două:
• percepţia - reacţia, care include acţiunile dinainte de răspunsul vehiculului;
• frânarea, care este descrisă de ecuaţiile de mişcare.
Schema de funcţionare a creierului în timpul conducerii unui autovehiculul este
asemănătoare funcţionării unui calculator. Conexiunile între organele de simţ – scoarţă
cerebrală şi scoarţa cerebrală - muşchi corespund căilor nervoase, senzoriale şi motorii. Spre
deosebire de calculator, creierul nu poate efectua dintr-o dată decât o singură operaţie.
Experienţele de laborator au arătat că dacă unui conducător îi trebuie 1,5 secunde pentru
percepţia şi reacţia la un stimul de pe drum, la o viteză de 90 km/h (25 m/s), distanţa parcursă
în acest timp va fi de 37,5 m până la începerea frânării.
Figura 3.7. Distribuţia timpilor de reacţie.
Figura 3.7 prezintă rezultatele cercetărilor în domeniu, cu privire la timpul de răspuns al
conducătorului, la frânare. Curba continuă din prima zonă a histogramei prezintă timpul de
reacţie a unei persoane care realizează măsurătorile, şi care înregistrează datele
44

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
conducătorilor. Cercetătorii au demonstrat că timpul de răspuns este mai lung atunci când,
conducătorul este luat prin surprindere.
Problemele majore referitoare la dispozitivele de control al traficului sunt legate de
distanţele la care pot fi:
1. detectate, ca obiecte în câmpul vizual;
2. recunoscute, ca dispozitive de control al traficului: semne, semnale, marcaje şi alte
mijloace auxiliare de semnalizare;
3. lizibile sau identificabile, astfel încât să fie înţelese şi conducătorul auto să acţioneze
corespunzător.
Figura 3.8 prezintă modelul conceptual de procesare a informaţiei primită de la dispozitivele de control al traficului, ca şi variabilele care îl influenţează. Literatura de specialitate este foarte bogată în date privind detectarea „ţintei” din mediul vizual complex, care demonstrează predilecţia conducătorului auto de a anticipa apariţia unor astfel de dispozitive.
Figura 3.8. Modelul procesării informaţiei recepţionate de la dispozitivele de control al traficului. Răspunsul conducătorului depinde de caracteristicile psihice şi de parametri cum ar fi:
vârsta, starea de sănătate, consumul de alcool sau de droguri, oboseala, lipsa somnului şi
starea emoţională. El depinde de complexitatea şi numărul stimulilor, dar şi de complexitatea
răspunsului cerut. Specialiştii trebuie să cerceteze posibilitatea de diminuare a numărului
stimulilor cu care conducătorii de autovehicule vin în contact într-o perioadă scurtă de timp.
45

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
Aceasta ar putea fi interpretată ca o regulă,
şi anume, ca la un moment dat să existe doar un
singur stimul, regulă care, datorită complexităţii
mediului înconjurător, nu este realistă.
Figura 3.9 prezintă două situaţii des
întâlnite. Prima se referă la faptul, amintit deja,
că timpul de reacţie este mai lung în cazul
stimulilor neaşteptaţi, decât în cazul stimulilor
cunoscuţi (de exemplu, la schimbarea
semnalului semaforului, conducătorul va
încetini şi/sau va opri). A doua se referă la
complexitatea informaţiei date, care este în
relaţie de directă proporţionalitate cu timpul de
rea
ma
nu
info
info
3.3
con
dec
con
dru
dist
ale
obi
se
Figura 3.9. Timpul de reacţie la stimuli neaşteptaţi.
cţie, deci cu cât informaţia este mai amplă şi complexă cu atât durata reacţiei va fi mai
re.
Acest principiu este folosit pentru a aminti că la amplasarea semnelor şi marcajelor rutiere
se recomandă aglomerarea (concentrarea) acestora, ceea ce ar însemna prea multe
rmaţii în acelaşi timp. Fenomenul este cunoscut sub denumirea de "poluare
rmaţională" şi conduce la apariţia reacţiilor false din partea conducătorilor auto.
.7. Metoda deplasării transversale a obiectului
Înţelegerea caracteristicilor conducătorilor auto descrise în acest capitol, poate folosi la
trolul vitezelor vehiculului în zone cu obstacole plasate pe marginea drumului pe care, la
izia specialiştilor se vor plasa semne de circulaţie.
Când se apropie de un obiect localizat lângă drum, aşa cum se poate vedea în figura 3.10,
ducătorii auto au tendinţa de a se deplasa departe de obiect, ca şi când, acesta ar fi chiar în
m. Cercetătorii au făcut măsurători asupra acestei tendinţe, plasând diferite obiecte, la
anţe laterale diferite, pe şosele cu două sau mai multe benzi de circulaţie, cu lăţimi diferite
carosabilului. Rezultatele obţinute au fost comparate cu cazul când nu se afla nici un
ect prezent.
Măsurătorile efectuate au constat în determinarea vitezei şi distanţei longitudinale la care
constată devierea laterală a vehiculului, precum şi la determinarea mărimii deplasării
46

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
laterale. Rezultatele majore ale experimentelor includ următoarele constatări: drumul îngust şi
obiectele apropiate de marginea drumului determină creşterea deplasării laterale.
Când obiectul a fost plasat pe marginea drumului, deplasarea laterală a fost de 1 m, în
cazul când erau două benzi de circulaţie de 2,5 m lăţime, şi de 0,55 m pentru lăţimi de 3,65 m
lăţime. În cele mai multe cazuri reducerea vitezei este aparentă.
Figura 3.10. Metoda deplasării transversale a obiectului.
Modelul propus de specialişti şi care a dat cele mai bune rezultate a fost denumit
"modelul deplasării laterale a obiectului". Acesta este bazat pe viteza schimbării unghiului
de vedere (derivata unghiului de vedere în raport cu timpul), θ . Modelul ia în considerare
relaţia dintre distanţa longitudinală x, deplasarea laterală a obiectului a şi unghiul de vedere θ,
astfel:
&
θ⋅= ctglx , (3.8)
θ⋅
θ−= 2sin
1dtdl
dtdx . (3.9)
Cum: vdtdx
= , este viteza autovehiculului, pentru valori mici ale unghiului θ, tangenta se
aproximează cu valoarea unghiului, vom avea:
2222
22
lxlv
lxl
lvsin
lv
dtd
+⋅
−=+
⋅−=θ−=θ . (3.10)
Această relaţie dă dependenţa funcţie de viteza de schimbare a unghiului de vedere ,
distanţa în lungul drumului x, distanţa în plan transversal l, precum şi de viteza v a
θ&
47

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
autovehiculului; conducătorul poate estima deplasarea laterală a obiectului analizând dacă
este un obstacol în cale autovehiculului sau un obiect lateral.
Dacă obiectul este în calea autovehiculului (l=0), conducătorul nu sesizează viteza de
schimbare a unghiului de vedere.
Fiecare conducător auto are un comportament subiectiv în privinţa vitezei de schimbare a
unghiului de vedere, ştiut fiind că orice conducător aflat în pericolul coliziunii, deplasează
autovehiculul departe pe direcţie laterală. S-a constatat că deplasarea laterală a obiectului
depinde şi de alţi factori, cum ar fi forma şi strălucirea obiectului. Acest model poate fi extins
şi în cazul în care obiectele se mişcă, cazul autovehiculelor care se deplasează în acelaşi sens
sau din sens contrar. În această situaţie, se ia în considerarea viteza relativă dintre vehiculele
aflate în mişcare.
4.3.8. Comportamentul la volan
Dată fiind cererea crescândă a solicitărilor în conducerea vehiculelor, este important ca
inginerii de drumuri şi de trafic să înţeleagă nevoia conducătorului auto de a dispune de
informaţii corespunzătoare şi de mijloacele de transmitere a acestora.
Cercetările efectuate au permis identificarea categoriilor de informaţii necesare
conducătorului ca şi factorii principali şi interacţiunile care afectează recepţia şi utilizarea lor.
La observarea drumului, atenţia poate fi captată de mai multe informaţii legate mai mult
sau mai puţin de conducerea automobilului. Descrierea modului de procesare a fluxului de
informaţii obţinute de conducătorul auto pe cale vizuală este prezentată în figura 3.11.
Pentru a lua decizii raţionale un conducător auto trebuie să primească informaţii sigure şi
clare pentru a reduce incertitudinea. Un conducător auto adună informaţia de la surse diferite
utilizând-o ca fundament pentru luarea deciziei şi pentru a traduce deciziile în acţiuni de
control al vehiculului.
Aşa cum indică tabelul 3.3, activităţile complexe implicate în conducerea automobilului
pot fi grupate în trei niveluri de performanţă:
• Nivelul de control;
• Nivelul de ghidare;
• Nivelul de navigare.
48

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
Figura 3.11. Procesarea fluxului de informaţii.
Tabelul 3.3:Acţiuni în conducerea autovehiculului, surse de informare şi importanţa informaţiei.
Categoria Acţiuni Surse de informare Importanţa informaţiei
Consecinţe defecţiuni
Control
(microperformanţă)
Operarea
vehiculelor,
controlul direcţiei,
controlul vitezei.
Marginea drumului,
marcarea separării
benzilor, semne de
avertizare, mişcarea.
Maximă
Situaţii de
urgenţă sau
accident.
Ghidare
(performanţă de
situaţie)
Selectarea şi
menţinerea unei
viteze sigure şi a
căii de rulare.
Geometria drumului,
obstacole, condiţii de
trafic, condiţii meteo.
Medie
Situaţii de
urgenţă sau
accident.
Navigare
(macroperformanţă)
Urmărirea
traseului, găsirea
direcţiei,
planificarea
călătoriei.
Experienţă, semne
direcţionale, hărţi,
servicii de turism.
Minimă
Întârzieri,
confuzie,
ineficienţă.
Nivelul de performanţă de control, este legat de operarea vehiculului şi cuprinde toate
activităţile care implică schimbul permanent de informaţii ce controlează intrările din sub-
49

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
sistemul om – vehicul. El include controlul lateral al vehiculului care este menţinut prin
comanda direcţiei şi controlul longitudinal care se exercită prin accelerări şi frânări.
Pentru a menţine controlul vehiculului, conducătorul auto primeşte informaţii despre
poziţia şi orientarea, în raport cu drumul, ca de altfel, şi reacţia inversă (feedback) la
răspunsul vehiculului la frânare, accelerare şi schimbarea direcţiei. Anumite informaţii sunt
primite în primul rând prin simţurile vizual, kinestezic şi aparatul vestibular.
Multe dintre activităţile desfăşurate de conducătorul auto sunt executate „automat” cu un
efort cognitiv minim. Pe scurt, funcţia de control se bazează pe deprinderile (skill based),
dobândite în procesul de învăţare.
O dată învăţate primele elemente de control al vehiculului, următorul nivel al
performanţei umane bazat pe reguli (rules-based), este nivelul de ghidare. Principalele
activităţi ale conducătorului implică menţinerea unei viteze de siguranţă şi a direcţiei de
deplasare potrivite cu elementele drumului şi condiţiile de trafic.
Mărimile de intrare ale nivelului de ghidare în sistem sunt, viteza de deplasare şi
răspunsul căii de rulare la geometria drumului, obstacole, trafic şi mediul înconjurător.
Informaţia prezentată sistemului om-vehicul provine de la dispozitivele de control al
traficului, descriere, condiţiile de trafic şi alte caracteristici de mediu, continua schimbare a
vehiculelor ce se deplasează de-a lungul drumului.
Al treilea nivel în care conducătorul acţionează ca un manager de la distanţă, este
navigaţia. Planificarea traseului şi ghidarea pe durata deplasării, de exemplu, corelând
direcţiile de la o hartă cu semnal ghid pe un coridor, caracterizează nivelul de performanţă al
navigaţiei, numit nivel de cunoştinţe prin comportament (knowledge-based behavior).
Acest nivel devine din ce în ce mai important pentru analiştii ingineriei traficului în
scopul „maturizării” sistemelor inteligente de transport – ITS.
Specialiştii au stabilit cinci principii de bază pentru prezentarea sistematică a informaţiei
necesare conducătorului auto.
1. Predominanţa. Conceptul predominanţei se bazează pe conştientizarea faptului că, în
orice moment, o anumită informaţie este mai importantă decât alte informaţii. Lipsa
unor anumitor categorii de informaţii poate conduce la situaţii de urgenţă sau accident;
lipsa altor categorii de informaţii poate cauza doar confuzie de moment sau întârzieri.
Evitarea unui automobil ce apare de pe o arteră laterală este mai importantă decât
decizia de a depăşi un vehicul ce se deplasează prea încet.
2. Limite de procesare. Când complexitatea situaţiilor din trafic creşte, timpul de răspuns
50

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
va creşte. Evident, dacă un conducător se confruntă cu mai multe situaţii complexe într-
un timp scurt, poate ajunge în situaţia în care este incapabil să primească şi să proceseze
o cantitate de informaţie cerută de un răspuns corect. Informaţia necesară
conducătorului trebuie să fie prezentată sistematic, şi să permită o serie importantă de
opţiuni simple, caz mult mai favorabil decât cel al unui număr mic de opţiuni complexe.
3. Cunoştinţe apriori. Se recomandă ca înainte de a se integra în fluxurile de trafic,
conducătorii auto să primească cât mai multe informaţii. Pentru aceasta, informaţiile
privind distanţele şi direcţiile spre punctul de destinaţie, timpii medii de călătorie,
categorii de drum şi alte informaţii care uşurează planificarea călătorie pot fi
comunicate, înainte de efectuarea deplasării.
4. Distributivitatea. Pe durata călătoriilor, conducătorii pot fi confruntaţi cu solicitarea
variată a atenţiei, în anumite zone fiind disponibile prea multe informaţii, iar în altele
prea puţine. Inginerii de trafic trebuie să găsească posibilitatea de a distribui încărcarea
cu informaţii pe traseu, astfel încât să fie evitată plictiseala de pe anumite porţiuni de
traseu sau suprasolicitarea conducătorilor auto în alte zone.
5. Expectativa. Promptitudinea conducătorului auto de a răspunde condiţiilor de drum,
situaţiilor din trafic şi sistemelor de informare este legată de expectativă. Pe baza
experienţei anterioare, conducătorii autovehiculelor se pot aştepta la anumite
caracteristici de proiectare şi operare a drumurilor.
De exemplu, ei se aşteaptă ca ieşirea de pe o autostradă să fie pe partea dreaptă a
drumului, dar reducerea numărului de benzi sau alte schimbări ale secţiunii transversale
a drumului, îi pot lua prin surprindere. În locurile unde conducătorii auto sunt surprinşi,
este necesar un timp de răspuns mai mare sau, există situaţii când pot avea un răspuns
nepotrivit sau întâmplător. Expectativa este importantă la toate nivelurile, dar mai ales
în cazul nivelului de ghidare.
3.4. OMUL – PIETON ŞI CĂLĂTOR
3.4.1. Circulaţia pietonilor în oraş
Proiectarea oraşelor moderne trebuie să ia în considerare printre alte probleme legate de
transport şi mişcarea pietonilor. Proiectarea spaţiului adecvat pentru circulaţia pietonilor va
respecta normele privind cerinţele de spaţiu ale persoanelor care nu pot ocupa un spaţiu
asemeni mărfurilor depozitate sau vehiculelor parcate.
Fiinţele umane folosesc spaţiul pentru activităţi diverse şi reacţionează în acest spaţiu într-
51

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
o manieră care reflectă percepţia corespunzătoare confortului personal. Hall a definit patru
categorii de distanţe:
• distanţa publică corespunde unui cerc cu diametrul de 4 m în jurul unei persoane, în
care nu se găseşte altă persoană; pentru comunicare, se apelează la gesturi şi ton
ridicat mai mult decât la senzaţii;
• distanţa socială corespunde unui spaţiu cuprins între 4 m până la 1,3 m în jurul unei
persoane, în care se poate comunica prin gesturi şi nivelul normal al vocii, iar în cazul
limitei minime şi prin contactul fizic;
• distanţa personală, este definită în limitele 1,3 m la 0,75 m în jurul unei persoane şi
corespunde aşa numitului „cerc al încrederii”. În acest spaţiu intervin pe lângă văz şi
mirosul şi pipăitul. Pentru limita inferioară a distanţei, contactul fizic cu persoanele
din jur este evitat cu dificultate.
• distanţa intimă, corespunde unui cerc cu raza inferioară valorii de 0,4 m, care este
atribuit doar interesului personal, contactul involuntar cu alte persoane fiind imposibil
de evitat.
La depăşirea distanţei personale, orice persoană trebuie să fie atentă la codul
comportamental pentru a preveni intimitatea inacceptabilă. Studiile arată că există, în
acceptarea acestor distanţe, diferenţe culturale dependente de zona geografică şi etnie.
Pe baza acestor studii au fost stabilite standardele nivelurilor de serviciu cu privire la
rezerva de spaţiu în cazul pietonilor, tabelul 3.4 şi tabelul 3.5.
Tabelul 3.4: Standardele de proiectare pentru spaţiul destinat pietonilor.
Nivelul de serviciu
A B C D E F
Trotuare
Spaţiul mediu/persoană (m2) >3,25 3,25-2,32 2,32-1,39 1,39-0,93 0,93-0,46 <0,46
Scări rulante
Spaţiul mediu/persoană (m2) >1,86 1,86-1,39 1,39-0,93 0,93-0,65 0,65-0,37 <0,37
Cozi (Pietoni/metru lăţime
trotuar/minut)
1,20 1,20-0,93 0,93-0,65 0,65-0,28 0,28-0,18 <0,18
Tabelul 3.5: Corelaţia dintre diferite niveluri de serviciu şi elipsa corpului. Elipsa corpului uman Nivelul de serviciu Caracteristici
52

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
A Zona confortului personal
B Zonele de circulaţie
C Zona fără atingere
D Zona cu atingere
E Depăşirea elipsei
corpului (disconfort)
3.4.2. Vitezele pietonilor şi comportamentul la traversarea străzii
Cercetările au evidenţiat o variaţie importantă a vitezelor cu care se deplasează pietonii
funcţie, atât de sex şi vârstă, cât mai ales de tipul deplasării, tabelul 3.6.
Inginerii de trafic adoptă pentru viteza de traversare a pietonilor (de exemplu, pentru
determinarea punctelor de conflict în cazul proiectării semnalelor unui program de
semaforizare) valoarea de 1,25 m/s, valoare supraestimată, dacă în zonă ponderea vârstnicilor
este importantă. În acest caz, o valoare de 0,9 - 1,0 m/s este considerată potrivită, pentru o
53

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
siguranţă de circulaţie sporită.
Tabelul 3.6: Vitezele de deplasare ale pietonilor în funcţie de vârstă şi sex
Mers încetinit
Mers liniştit
Mers rapid
Fuga lentă
Fuga rapidă Vârsta
ani Sex
Km/h m/s Km/h m/s Km/h m/s Km/h m/s Km/h m/s M 1,7 0,47 2,0 0,55 2,8 0,78 3,5 0,90 4,0 1,11 5 F 1,7 0,47 2,0 0,55 2,8 0,78 3,5 0,90 4,0 1,11
M 2,8 0,78 3,5 0,90 4,6 1,28 7,8 1,94 11,0 3,05 6
F 2,8 0,78 3,5 0,90 4,6 1,28 7,8 1,94 11,0 3,05
M 3,1 0,86 4,4 1,22 5,5 1,53 8,5 2,36 12,2 3,39 7...8
F 2,9 0,80 4,2 1,16 5,3 1,47 8,0 2,22 11,8 3,28
M 3,4 0,94 4,6 1,28 6,0 1,67 8,9 2,47 12,7 3,53 8…10
F 3,0 0,83 4,3 1,19 5,5 1,53 8,4 2,33 12,5 3,47
M 3,7 1,03 4,9 1,36 6,2 1,72 9,3 2,58 13,8 3,83 10...12
F 3,3 0,91 4,8 1,33 5,8 1,61 8,9 2,47 13,4 3,72
M 3,8 1,06 5,2 1,44 6,5 1,80 10,0 2,78 14,6 4,06 12…15
F 3,6 1,00 5,0 1,39 6,1 1,69 9,5 3,64 14,1 3,92
M 3,9 1,08 5,4 1,50 6,8 1,89 10,3 2,86 16,3 4,53 15...20
F 3,7 1,03 5,2 1,44 6,3 1,75 10,0 2,78 14,9 4,14
M 4,2 1,16 5,7 1,58 6,9 1,92 11,0 3,06 16,7 4,64 20...30
F 4,1 1,14 5,3 1,47 6,6 1,83 10,6 2,94 15,3 4,25
M 3,9 1,08 5,7 1,58 6,8 1,89 10,6 2,94 15,5 4,30 30...40
F 3,8 1,06 5,2 1,44 6,5 1,80 9,8 2,72 14,1 3,92
M 3,8 1,06 5,3 1,47 6,6 1,83 9,6 2,67 14,3 3,97 40...50
F 3,6 1,00 4,9 1,36 6,7 1,86 9,9 2,75 12,7 3,53
M 3,4 0,94 4,8 1,33 6,0 1,67 8,6 2,39 12,5 3,47 50...60
F 3,3 0,91 4,5 1,25 5,6 1,55 7,9 2,19 11,2 3,11
M 3,0 0,83 3,9 1,08 5,1 1,42 7,0 1,94 10,3 2,86 60…70
F 2,9 0,80 3,9 1,08 4,9 1,36 6,8 1,89 9,5 2,64
M 2,5 0,69 3,2 0,89 4,2 1,16 5,6 1,55 8,7 2,42 >70
F 2,4 0,66 3,2 0,89 4,1 1,14 5,5 1,53 7,3 2,03
Se constată că viteza de deplasare a vârstnicilor nu este cu mult inferioară adulţilor, însă ei
sunt incapabili să atingă viteze mai mari (fuga), în caz de nevoie. Vitezele de traversare ale
copiilor sunt net superioare. Studiile efectuate asupra pietonilor de vârste diferite au
evidenţiat rezultatele prezentate în figura 4.16.
54

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
Figura 3.16. Vitezele de traversare a străzilor, specifice pietonilor, în funcţie de vârstă.
Figura 3.17. Procentul pietonilor care acceptă intervale de o anumită mărime faţă de
automobilul care se apropie.
Pe lângă responsabilitatea pentru proiectarea amenajărilor de circulaţie şi a spaţiului, care
corespunde cel mai bine confortului fluxurilor de pietoni, inginerii de trafic trebuie să fie
preocupaţi şi de comportamentul pietonilor, din punctul de vedere al securităţii rutiere.
Accidentele care implică pietonii se produc, în special, la traversarea străzii şi conflictul cu
fluxul de vehicule. Figura 3.17 arată o variaţie mare în acceptarea intervalelor dintre
vehiculele pe care le observă în fluxul de traversat.
Acceptarea intervalelor depinde de numeroşi factori, dar în principal de viteze (viteza de
apropiere a vehiculelor şi viteza estimată a pietonului), de abilitatea de a observa (analiza şi
înţelege) fluxul care se apropie, gradul de atenţie şi pregătire.
3.4.3. Factori de proiectare a transportului public cu autovehicule
Proiectarea transportului public de pasageri cu autovehicule rutiere este influenţată în
55

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
foarte mare măsură de percepţia pasagerilor privind confortul. Determinarea confortului este
o problemă extrem de complexă, iar definirea ei este dificilă. Confortul este afectat de trei
categorii de factori:
• factori de situaţie şi sociali;
• caracteristicile personale ale indivizilor;
• factori de mediu.
Factorii sociali care afectează percepţia pasagerilor privind confortul, includ gradul de
aglomerare în staţii şi vehicule, prezenţa altor călători şi familiaritatea cu persoanele de pe
scaunele alăturate.
Caracteristicile pasagerilor includ factori psihologici, fizici şi fiziologici ca şi experienţa
anterioară în aceste vehicule sau vehicule similare, sex, mărime, predispoziţia la rău de
mişcare, sănătatea fizică şi mintală şi altele.
Tabelul 3.6: Caracteristicile fizice ale mediului legat de vehicul.
Factori dinamici Factori de mediu ambiant Factori de spaţiu
Acceleraţia verticală Acceleraţia laterală Acceleraţia longitudinală Gradul de clătinare (mişcare de ruliu) Gradul de înclinare a autobuzului Gradul de alunecare Zdruncinături şi şocuri Urcări şi coborâri Schimbări ale vitezei
Presiune Temperatură Umiditate Ventilare Fum Mirosuri Calitatea aerului Zgomot
Spaţiu de lucru Lăţimea scaunelor Spaţiul pentru picioare Ajustarea scaunelor Forma scaunelor Soliditatea scaunelor Distanţa parcursă stând în picioare
În timp ce categoriile de factori sociali şi individuali sunt în afara oricărui control al
proiectanţilor, factorii de mediu pot fi influenţaţi.
Tabelul 3.6 prezintă caracteristicile fizice ale mediului din vehicule care afectează
confortul şi pot fi controlate. Importanţa factorilor fizici în perceperea confortului a fost
recunoscută pe termen lung. Cercetările au permis dezvoltarea unor modele de confort al
calităţii călătoriei pe baza mişcării vehiculelor. De exemplu, calitatea călătoriei cu autobuzele
moderne a fost evaluată cu ecuaţia:
vp a33,19i53,033,0C ⋅+⋅+= , (4.18)
unde:
C – indicele de confort;
ip – gradul de înclinare, grade/secundă;
av – acceleraţia verticală, m/s2.
56

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
Tabelul 3.7: Măsurători antropometrice pentru persoane stând în picioare.
Dimensiuni (metri) Pasageri în picioare Comentariu 1 2 3 4 5
Suprafaţa proiectată (m2)
Torace [0,49] 0,53
[0,26] 0,31 - - - [0,13]
0,16
Torace cu picioare
[0,61] 0,66
[0,29] 0,31 - - - [0,17]
0,21
Braţele orizontal cu vârful degetelor în atingere
0,95 0,45 - - - 0,40
Persoana transportă un pachet
0,53 0,57 0,16 0,41 - 0,30
Persoana transportă un geamantan mic
0,82 0,30 0,67 0,15 - 0,25
Persoana transportă un geamantan mare
0,73 0,31 0,60 0,20 0,53 0,33
Persoana transportă schiuri
0,70 0,30 0,75 - - 0,50
Persoana transportă două geamantane mari
0,93 0,60 0,53 0,20 - 0,56
Cuplu 1,4 0,43 - - - 0,61
Persoana stând lângă un stâlp 0,58 0,905 - - - 0,26
Pentru proiectare, astfel de indici sunt insuficienţi. Proiectanţii trebuie să considere şi
rezerva de spaţiu precum şi o mare diversitate de factori de mediu. Spaţiul cerut depinde de
timpul petrecut în acel loc. Aglomeraţia, care este acceptabilă pentru perioade de timp scurte,
devine inacceptabilă pe durata călătoriilor lungi. La fel de importantă este şi posibilitatea
57

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
pasagerilor de a sta aşezaţi, o perioadă lungă pe durata călătoriei. Cerinţele de spaţiu pentru
pasagerii aşezaţi şi în picioare sunt prezentate în tabelul 3.7.
Consideraţii de mediu. Pe lângă spaţiu, proiectanţii vehiculelor destinate transportului
public în condiţii de tranzit, trebuie să ia în considerare factorii de mediu prezentaţi în tab.
3.8.
Tabelul 3.8: Măsurători antropometrice pentru persoane aşezate pe scaun.
Dimensiuni (metri)Pasageri aşezaţi pe scaun Comentariu 1 2
Suprafaţa proiectată (m2)
Cererea minimă de spaţiu
[0,40] 0,46
[0,60] 0,66
[0,24] 0,30
Situaţie normală, de confort 0,66 0,82 0,54
Persoană aplecată 0,66 0,62 0,41
Situaţie lipsită de confort 1,08 0,66 0,71
Situaţie de confort 1,34 0,82 1,10
Valorile corespunzătoare acestor factori, sunt prezentate în tabelul 3.9. Tabelul 3.9:Limitele condiţiilor de mediu pentru transportul public de pasageri.
Factor ambiental Confortabil Neconfortabil Inacceptabil Temperatură (oC) Umiditate(%) Vibraţii (mm/sec) Zgomot (dBA) Acceleraţii (m/s2) Smucituri (m/s3) Înclinare pardoseală (%)
20 – 22 30 – 70
0,2 < 65
1 0,6
0 – 4
12 - +16 şi 30 – 35 30 – 20 şi 70 – 80
1,2 75 – 85
2 1
5 – 10
< 12 sau > 35 < 20 sau > 80
3 > 85
4 1,5 >10
58

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
4.CARACTERISTICILE GEOMETRICE ALE ARTERELOR RUTIERE
4.1. INTRODUCERE
La proiectarea, executarea şi întreţinerea drumurilor trebuie să se aibă în vedere, în primul
rând, principiul satisfacerii, cu costuri minime, a necesităţilor de transport viitoare, atât din
punct de vedere cantitativ – în ceea ce priveşte volumul şi compoziţia traficului – cât şi
calitativ – în ceea ce priveşte condiţiile de siguranţă şi confort, precum şi circulaţia cu viteze
ridicate.
Problemele privind proiectarea drumurilor conform principiului deja amintit interesează
atât specialiştii din compartimentele de proiectare cât şi pe cei care asigură execuţia,
exploatarea şi întreţinerea. Aceste probleme se referă la:
• Organizarea, sistematizarea şi clasificarea reţelei de drumuri în vederea asigurării
cerinţelor şi condiţiilor optime de transport, precum şi a creării de reţele unitare cu
caracteristici tehnice corespunzătoare, pentru o siguranţă şi fluenţă, maxime.
• Stabilirea reală, în proiectarea necesităţilor de transport, a condiţiilor de transport şi a
caracteristicilor circulaţiei viitoare, prognozate.
• Asigurarea sau îmbunătăţirea în proiectare şi execuţie a caracteristicilor tehnice ale
drumurilor (elemente geometrice, capacitatea de circulaţie etc.).
• Asigurarea sau îmbunătăţirea în proiectare şi execuţie a unei circulaţii constante şi cu
viteze ridicate pe sectoare cât mai lungi, prin amenajarea intersecţiilor sau
ramificaţiilor şi prin specializarea fluxurilor de trafic o dată cu construcţia,
modernizarea sau întreţinerea drumurilor.
• Asigurarea sau îmbunătăţirea condiţiilor de transport şi de siguranţă a circulaţiei la
proiectare şi execuţie prin măsuri de securitate, dirijare şi semnalizare, precum şi prin
măsuri de asigurare a spaţiilor necesare pentru parcarea, staţionarea şi confortul
beneficiarilor drumurilor o dată cu construcţia, modernizarea sau întreţinerea drumului.
Sistematizarea circulaţiei rutiere cuprinde, în general, trei faze:
• consolidarea sau întărirea reţelei de bază existente, prin crearea de noi legături directe
între principalele centre populate şi prin modernizarea principalelor trasee existente;
• amplificarea sau mărirea reţelei rutiere prin crearea de noi legături sau itinerarii
concurente între localităţi, precum şi modernizarea acestora;
59

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
• extinderea şi sistematizarea completă a reţelei rutiere prin crearea de artere noi de
legătură între oraşe, modernizarea traseelor principale şi crearea unei reţele de
autostrăzi care constituie ultima fază a sistematizării.
Pentru a se realiza o sistematizarea a reţelei şi o planificare a amenajărilor drumurilor, în
toate ţările s-a pornit de la anumite principii de organizare şi alcătuire a reţelei rutiere:
• să asigure legătura dintre principalele centre populate, pe traseele cele mai
corespunzătoare;
• să fie suficient de mare pentru a asigura dezvoltarea transporturilor rutiere;
• să fie unitară şi ordonată în diverse categorii, corespunzătoare necesităţilor social-
economice şi de transport;
• traseele reţelei să asigure condiţii mai bune de folosire şi confort;
• drumurile proiectate sau construite să aibă o eficienţă sporită, amenajarea lor să fie
corelată cu traficul prognozat.
Pentru proiectarea drumurilor este necesar să se cunoască traficul actual şi cel prognozat
pentru o perioadă viitoare de timp. Este bine ca perioada de prognoză să corespundă cu durata
medie de serviciu a drumului şi în special a îmbrăcămintei, care are o durată ceva mai scurtă.
Ca durată de serviciu pentru traficul rutier de perspectivă, se consideră o perioadă de 15-20
ani, adică durata medie între două reparaţii la betoanele asfaltice, care constituie mixtura
folosită mai ales la construcţia şi modernizarea drumurilor cu trafic intens.
Traficul actual rezultă din numărători sau din recensământul general, periodic sau din
numărători permanente.
La stabilirea creşterii volumelor de trafic se ţine seama de tendinţa de creştere din trecut,
pornindu-se de la numărători periodice precum şi de creştere viitoare probabilă, care depinde
de următorii factori:
• devierea sau atragerea unor curenţi de trafic de pe alte trasee atunci când se obţin
economii de timp şi de cost la transporturi;
• generalizarea sau naşterea unor curenţi de trafic noi pe traseu amenajat datorită creării
de noi legături rutiere;
• emigrarea sau plecarea curenţilor de trafic de pe traseul amenajat pe alte trasee
construite sau amenajate mai târziu, în special atunci când se construiesc în apropiere
autostrăzi;
• creşterea sau dezvoltarea traficului pe drumul amenajat datorită construcţiei de
obiective industriale sau social-economice în zona traseului respectiv;
60

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
• atunci când nu se schimbă originea şi destinaţia traficului, ca de exemplu la artere de
rocadă sau de centură a localităţilor, nu se ia în considerare emigrarea curenţilor de
trafic.
Determinarea traficului de perspectivă hotărâtor pe un traseu se face după traficul şi
caracteristicile rezultate pe diferite tronsoane. Pentru amenajarea unitară a traseului se
consideră ca determinate, în general în toate ţările, secţiuni care reprezintă 20-30% din
lungimea traseului şi ale căror limite de trafic nu diferă între ele prea mult, adică ±(10-20%).
La execuţia drumurilor şi ulterior, după darea lor în exploatare, prevederile sau prognozele
de trafic se verifică la intervale fixe, prin recenzări de trafic. Se fac corecturi atunci când
traficul măsurat cu această ocazie diferă apreciabil faţă de cel avut iniţial.
4.2. CLASIFICAREA CĂILOR RUTIERE
Drumurile se pot clasifica din mai multe puncte de vedere:
A. Din punct de vedere administrativ (după organul care administrează şi întreţine drumul, tabelul 4.1.):
Tabelul 4.1 Nr. crt. Categoria drumului Lungime, km Organul care le administrează
1 Drumuri naţionale din care autostrăzi
14.683 273*
Ministerul Transporturilor prin Administraţia Naţională a Drumurilor
2 Drumuri judeţene 26.967 Consiliile judeţene prin Regiile autonome ale drumurilor şi podurilor
3 Drumuri comunale 31.116 Consiliile judeţene prin Regiile autonome ale drumurilor şi podurilor
4 Străzi în localităţi urbane şi rurale 80.198 Primăriile localităţilor prin serviciile de
specialitate Nota: *) corespunde anului 2008, celelalte anului 2000
B. După punctele pe care le leagă drumul:
• Drumuri internaţionale prin care se face legătura cu ţările vecine.
• Drumuri de tranzit care leagă două centre importante îndepărtate pentru care
circulaţia dintre ele este circulaţia de trecere (tranzit). Din această categorie fac
parte majoritatea drumurilor:
• drumuri de trafic local;
• drumuri turistice;
• drumuri sezoniere;
• drumuri militare (de interes strategic).
C. După gradul de perfecţionare tehnică a îmbrăcămintei drumului, care ţine seama de
intensitatea traficului:
61

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
• Drumuri naturale, fără nici o amenajare;
• Drumuri provizorii sau sezoniere care au o amenajare uşoară, nepermanentă,
corespunzătoare numai vârfurilor de circulaţie din anumite perioade ale anului;
• Drumuri de pământ la care calea este consolidată cu pământ şi pot fi:
• drumuri de pământ îmbunătăţit;
• drumuri de pământ stabilizat;
• drumuri prin împietruire:
• împietruiri din pietriş natural (ovalizat);
• împietruiri din piatră cilindrată (macadam);
• drumuri moderne care satisfac cerinţele circulaţiei moderne.
Îmbrăcămintea cu care se consolidează calea de rulare a acestor drumuri, se împarte:
• îmbrăcăminte din blocuri aşezate manual (de exemplu, pavajul din pavele de
piatră);
• îmbrăcăminte aglomerată, în care mixtura minerală din care este alcătuită.
În lucrările de drumuri se utilizează în mod obişnuit doi lianţi eficace:
• liant hidraulic – cimentul, rezultă şosele betonate;
• liant hidrocarbonat – bitumul, rezultă şosele asfaltate.
D. Clasificarea tehnică, după viteza de proiectare sau circulaţie.
Conform standardelor româneşti, viteza de proiectare este viteza cu care poate circula un
turism izolat în punctele cele mai dificile ale traseului, dacă, din punctul de vedere al
drumului, sunt asigurate condiţiile de siguranţă. Dificultatea în alegerea justă a vitezei de
proiectare a drumului care este la baza determinării principalelor elemente geometrice ale
drumului. Au fost stabilite următoarele clase de drum, prezentate în tabelul 4.2.:
Tabelul 4.2. Clasa drumului I II III IV V
Viteza, km/h 100 80 60 40 25
Proiectarea geometrică depinde de categoria terenului, adică de denivelările acestuia.
Standardele prevăd următoarele tipuri de teren, tabelul 4.3.:
Tabelul 4.3 Nr.crt. Clasificarea terenului Înclinarea transversală,%
1 Şes 0 – 10
2 Deal 10 – 25
3 Munte 25 - 60
62

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
Conform standardelor americane IRC, viteza de proiectare este definită ca o viteză
maximă de siguranţă care poate fi menţinută peste o secţiune a drumului. Vitezele de
proiectare recomandate de standardele americane pentru diferite categorii de teren sunt
prezentate în tabelul 4.4.
Tabelul 4.4.
Şes Deal Munte Teren accidentat Clasificare Viteza
max. Viteza min.
Viteza max.
Viteza min.
Viteza max.
Viteza min.
Viteza max.
Viteza min.
Drumuri naţionale 100 80 80 65 50 40 40 30
Drumuri interes major 80 65 65 50 40 30 30 20
Alte drumuri 65 50 50 40 30 25 25 20
Drumuri locale 50 40 40 35 25 20 25 20
Viteza de proiectare ar trebui, pe cât posibil, să fie uniformă de-a lungul unui drum dat.
Uneori, datorită schimbărilor din teren, vor trebui adoptate diferite viteze, caz în care se
recomandă o modificare treptată, prin presemnalizarea cu ajutorul semnelor de circulaţie.
La alegerea vitezei de proiectare trebuie avute în vedere elementele următoare:
• importanţa economică şi administrativă a drumului;
• elementele traficului rutier;
• relieful.
Astfel, se recomandă categoriile de drum funcţie de intensitatea traficului şi forma de
relief, conform tabelului 4.5.:
Tabelul 4.5.
Intensitatea traficului, Vt/zi Şes Deal Munte
>3000 I I I - II
1500 - 3000 I II III
500 - 1500 I – II II - III III - IV
100 - 500 II - III III - IV IV - V
Clasificarea funcţională.
Rolul funcţional al drumurilor este mai important chiar decât proiectarea geometrică.
Astfel, conform figurii 4.1. este descris conceptul ponderii relative a fiecărei categorii de
drum, în funcţie de mobilitate (de exemplu, fluenţa). Se constată că, zonele greu accesibile
63

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
sunt caracterizate de mobilitate scăzută, iar pentru a
creşte mobilitatea sunt necesare drumuri modernizate
de tipul autostrăzilor.
Cerinţele de proiectare pentru diferitele tipuri de artere
rutiere urmăresc funcţiile pe care le servesc, figura 4.2.
Străzile şi drumurile locale sunt proiectate pentru
vehicule uşoare şi de viteză mică, pentru accesul în
zonele rezidenţiale, comerciale etc., fiind astfel
proiectate pentru a descuraja traficul intens. Pe de altă
parte, autostrăzile şi arterele colectoare principale, sunt
proiectate pentru vehiculele capabile să dezvolte viteză
mare şi pentru vehiculele grele. Ele sunt spaţioase şi
proiectate astfel încât să asigure fluxuri continue. Figura 4.1. Relaţia dintre mobilitate şi posibilităţile de acces în anumite zone
4.3. ELEMENTELE GEOMETRICE ALE DRUMURILOR
Dacă se consideră o secţiune verticală
printr-un drum, verticala care trece prin
mijlocul drumului se numeşte axa
drumului în plan transversal.
Linia continuă care rezultă din
intersecţia planului generat de aceste
verticale cu suprafaţa drumului formează
axa drumului, iar linia terenului, traseul
drumului. Axa drumului se prezintă ca o
succesiune de curbe în spaţiu.
O secţiune verticală normală defineşte
profilul transversal al drumului.
La proiectarea şi executarea drumului
se folosesc practic, două proiecţii ale axei
drumului: proiecţia în plan orizontal şi
proiecţia în plan vertical.
Figura 4.2. Tipuri de artere rutiere
Proiecţia drumului în plan orizontal formează planul traseului.
64

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
Proiecţia axei drumului şi a liniei traseului pe un plan vertical formează profilul
longitudinal.
4.3.1. Profilul longitudinal al drumului
Intersecţia suprafeţei obţinute de generatoarele verticale ce trec prin axa drumului, cu
suprafaţa terenului natural şi cu platforma drumului, proiectată desfăşurat pe un plan vertical,
formează profilul longitudinal al drumului.
Proiecţia intersecţiei cu suprafaţa terenului natural formează linia terenului sau linia
neagră (se desenează cu culoare neagră), figura 4.3.
Proiecţia intersecţiei cu platforma drumului formează linia proiectului sau linia roşie (se
desenează cu culoare roşie).
Orice punct de pe linia terenului sau de pe linia roşie se defineşte printr-o cotă precisă.
Cotele punctelor de pe linia terenului se numesc cotele terenului. Cotele punctelor de pe linia
proiectului se numesc cotele proiectului. Diferenţa dintre cota proiectului şi cota terenului se
numeşte cotă roşie sau cotă de execuţie.
Figura 4.3. Reprezentarea secţiunii profilului longitudinal
Este de dorit ca linia roşie să urmărească, în general, înclinările terenului natural pentru a
evita, pe cât posibil, lucrări importante de terasament. În realitate, pentru a satisface condiţiile
unei circulaţii confortabile şi sigure, linia roşie nu poate urmări toate inflexiunile terenului,
fiind necesare anumite corectări.
Dacă corectările se fac astfel încât, linia roşie să se găsească sub linia terenului, drumul
este în săpătură, tranşee sau debleu. Dacă linia roşie trece deasupra liniei terenului, astfel
încât este necesară umplerea spaţiului dintre două linii, drumul se găseşte în umplutură,
împlinire sau rambleu.
65

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
Linia roşie are porţiuni orizontale şi înclinate. Porţiunile orizontale se numesc paliere, iar
porţiunile înclinate se numesc declivităţi.
Declivitatea se denumeşte rampă sau pantă după cum drumul urcă sau coboară în sensul
kilometrajului, astfel:
• dacă cotele punctelor de axă cresc succesiv faţă de punctele precedente, drumul se
găseşte în urcuş sau în rampă;
• dacă cotele punctelor de axă scad succesiv faţă de punctele precedente, drumul se
găseşte în coborâş sau în pantă.
Mărimea declivităţilor se exprimă prin valoarea numerică a tangentei trigonometrice a
unghiului pe care îl face linia roşie cu orizontala (figura 4.3).
În mod obişnuit, declivitatea se exprimă în procente (%) şi reprezintă creşterea înălţimii pe
unitatea de lungime (la drumuri, unitatea de lungime este L = 100 m, iar la căi ferate L = 1000
m). În cazul căilor ferate, declivitatea se notează în miimi, întrucât acestea au declivităţi mai
mici decât drumurile.
Fiecărei viteze de
proiectare îi corespunde o
anumită declivitate
maximă şi excepţională
stabilite prin standarde
naţionale. Figura 4.4. Racordarea traseului drumului în plan vertical.
Figura 4.5. Parametrii curbelor verticale
Punctele A şi B se numesc puncte de schimbare de declivitate.
66

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
Distanţa dintre două puncte consecutive de schimbare a declivităţii se numeşte pas de
proiectare. În profilul longitudinal, declivităţile se racordează prin curbe de racordare
(obişnuit, arce de cerc).
Curbele de racordare sunt concave şi convexe (fig. 4.4). La racordarea crestelor se
utilizează curbe de racordare convexă. Mărimea razei la curbele de racordare convexe se
calculează punând condiţii pentru asigurarea vizibilităţii în profil longitudinal (un vehicul care
urcă o declivitate să vadă la timp un obstacol pe declivitatea opusă).
La traversarea văilor se utilizează curbe de racordare concave. Aici valoarea razelor nu
se mai determină punând condiţii de vizibilitate deoarece aceasta este asigurată, ci din condiţii
de limitare a mărimii forţei centrifuge verticale, ce ia naştere în vederea facilitării mişcării
autovehiculului de pe o declivitate pe cealaltă.
Curbele verticale se aleg astfel încât să asigure: securitatea şi confortul mişcării, evacuarea
apei, uşurinţa conducerii autovehiculului, distanţă de vizibilitate bună şi un volum redus al
lucrărilor de terasament.
În figura 4.5, i1 este înclinarea iniţială a drumului, iar i2, este înclinarea (valoarea
tangentei) finală, A este valoarea absolută a diferenţei, în grade sau procente, L este lungimea
curbei verticale măsurate în plan orizontal, M este punctul iniţial (de racordare al tangentei
iniţiale la curbă) al curbei verticale, V este punctul aflat la intersecţia tangentelor, iar N este
punctul de intersecţie al curbei cu tangenta finală. În practică, curbele verticale sunt astfel
aranjate încât jumătate din lungimea curbei este poziţionată înaintea punctului V, iar jumătate
după acesta.
Curbele care satisfac această criteriu se numesc curbe verticale tangente egale.
În figura 4.5 sunt prezentate mai multe variante de curbe verticale care corespund
punctelor unor şosele, atunci când o curbă orizontală întâlneşte cu o curbă verticală.
Aceste puncte sunt foarte bine definite prin măsurători de-a lungul unui plan orizontal,
raportat la o verticală.
Principiile fundamentale ale curbelor verticale
La racordarea tangentei cu o
curbă verticală potrivită, se
foloseşte o relaţie matematică
care defineşte poziţia verticală
(înălţarea) în fiecare punct. S-a
considerat ca potrivită o funcţie Figura 4.6. Elementele curbelor convexe
67

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
parabolică deoarece, printre altele, aceasta oferă o valoare constantă a schimbării pantei şi
implică curbe tangente egale. Forma generală a ecuaţiei parabolei, aplicată curbelor verticale
este:
cbxaxy ++= 2 , (4.1)
unde y este ordonata punctului aflat la distanţa x sau înălţimea în lungul curbei, măsurată în
metri, faţă de punctul M. Pentru determinarea constantelor a şi b trebuie determinată prima
derivată, obţinându-se panta tangentei,
baxdxdy
+= 2 . (4.2)
În punctul M, x=0, deci:
1idxdyb == . (4.3)
Cea de-a doua derivată, exprimă rata de schimbare a pantei,
adx
yd 22
= . (4.4)
Rata medie de schimbare a pantei, din figura 4.15 poate fi scrisă ca:
Lii
dxyd 12
2 −= . (4.5)
Rezultă:
Liia
212 −
= (4.6)
Trebuie adăugate câteva proprietăţi ale curbelor verticale. De exemplu, înălţarea, care este
distanţa verticală da la punctul iniţial de tangenţă la curbă, ilustrată în figura 4.6., este foarte
importantă pentru proiectarea şi construcţia curbelor; y este înălţimea în lungul curbei
corespunzătoare fiecărei distanţe x de la punctul de racordare M; ym, este ordonata
corespunzătoare mijlocului curbei sau cota E din figura 4.7; ymax este înălţarea maximă
corespunzătoare punctului N. În condiţiile parabolei cu tangente egale poate fi demonstrat că:
2
200x
LAy = (4.7)
Din figura 4.6 rezultă:
800ALyE m == , (4.8)
68

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
şi
200maxALy = . (4.9)
Pentru calculul punctului cel mai scăzut şi cel mai ridicat al curbelor verticale (când
acestea nu se găsesc la capetele curbei, punctele M şi N), se notează cu
lAlLK = , (4.10)
unde L se exprimă în metri, iar A, în procente.
K poate fi utilizat pentru a calcula coordonatele punctului cel mai scăzut şi cel mai ridicat
al curbelor verticale concave şi convexe, folosind relaţia:
1iKx ⋅= (4.11)
unde x este distanţa de la
punctul M la punctul de
minim sau de maxim al
curbei.
În cuvinte, valoarea K
este distanţa orizontală, în
metri, corespunzătoare
unei modificări cu un procent a înclinării curbei.
Figura 4.7. Elementele curbelor verticale
Înălţimea în lungul curbei, notată cu E, este determinată cu relaţia 4.8.
Construcţia curbelor verticale implică cheltuieli mari cu deplasarea cantităţilor mari de
pământ. Astfel că primul obiectiv pe care îl urmăresc proiectanţii de drumuri este minimizarea
costurilor de construcţie, asigurând în acelaşi timp un nivel ridicat al siguranţei şi confortului
circulaţiei.
Criterii de proiectare a aliniamentelor verticale
În analiza şi controlul declivităţilor una dintre cele mai importante consideraţii este efectul
înclinării drumului după costurile de operare ale vehiculelor. Cercetările au demonstrat o
creştere importantă a consumului de combustibil şi o reducere a vitezei când înclinarea
drumului creşte. Recomandările standardelor se referă la pante maxime de 5% pentru o viteză
de 110 km/h; pentru o viteză de 50 km/h, pantele pot atinge 7 – 8%, dar pot fi până la 15%
pentru străzi în teren de deal.
69

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
Lungimea de vizibilitate. Drumurile sigure trebuie să fie proiectate astfel încât să ofere
conducătorilor lungimea de vizibilitate pentru a evita apariţia pe neaşteptate a unui obstacol şi
să poată depăşi vehiculele lente fără pericol.
Pentru exploatarea în condiţii bune a autovehiculelor pe declivităţi trebuie să se asigure
lungimea de vizibilitate necesară. Această lungime de vizibilitate se determină din două
condiţii:
• Lungimea de vizibilitate de siguranţă la frânare;
• Depăşirea în condiţii de deplină siguranţă.
1. Distanţa de vizibilitate de siguranţă la frânare reprezintă distanţa minimă necesară
conducătorului auto, la viteza de proiectare sau o viteză apreciată, de a opri automobilul fără a
sesiza curba verticală ca pe un obstacol. Pentru siguranţă, se impune o distanţă minimă de
vizibilitate pentru diferitele categorii de drumuri. Aceasta se bazează pe suma a două
componente:
• Distanţa parcursă din momentul semnalizării opririi vehiculului din faţă până când
începe frânarea. Există o variaţie mare a timpului de reacţie a conducătorilor auto, aşa
cum a fost prezenta în paragraful 3.1, timp cerut pentru ca acesta să reacţioneze şi să
frâneze. Timpul de reacţie necesar pentru sesizarea obstacolului este de aproximativ
2/3 secunde, însă timpul necesar pentru reacţia propriu zisă este de peste 1 secundă.
Există conducători pentru care timpul de percepere reacţie poate ajunge la 3,5s.
• Spaţiul de frânare cerut pentru oprirea vehiculului după ce au fost acţionate frânele.
Această componentă depinde de: viteza vehiculului, condiţiile de frânare, suprafaţa
drumului precum şi aliniamentul şi declivităţile drumului.
Distanţa de frânare. Distanţa aproximativă de frânare a unui autovehicul pe un drum
orizontal este calculată după relaţia:
gfvd
⋅⋅=
2
2
, (4.12)
unde: d – distanţa de frânare, m; v – viteza vehiculului la momentul aplicării frânării, m/s; f –
coeficient de frecare; g – acceleraţia gravitaţională, m/s2.
Dacă viteza se exprimă în km/h, rezultă relaţia:
fvd
⋅=
254
2
. (4.13)
70

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
Se presupune că forţa de frecare este uniformă pe durata frânării. Acest lucru nu este chiar
adevărat, ea depinzând de forţa de apăsare pe pedala de frânare. Alţi factori fizici care
influenţează coeficientul de frecare sunt: presiunea din pneuri, tipul şi starea suprafeţei pe
care se rulează, condiţiile climaterice – ploaie, zăpadă, gheaţă. Coeficientul de frecare în cazul
derapării poate varia între valorile 0,4 pentru 30 km /h şi 0,28 pentru 120 km/h pe carosabilul
umed.
Distanţele de vizibilitate recomandate pentru carosabilul umed sunt date în tabelul 4.6. În
acest tabel, timpul de reacţie este combinat.
Tabelul 4.6.
Reacţie la frânare Viteza de proiectare
[km/h]
Viteza admisă [km/h]
Timp [s]
Distanţă, [m]
Coeficientde
frecare, f
Spaţiu de frânare pe drum
orizontal, [m]
Lungimea de vizibilitate,
[m]
30 40 50 60 70 80 90 100 110 120
30-30 40-40 47-50 55-60 63-70 70-80 77-90 85-100 91-110 98-120
2,5 2,5 2,5 2,5 2,5 25, 2,5 2,5 2,5 2,5
20,8-20,8 27,8-27,8 32,6-34,7 38,2-41,7 43,7-48,6 48,6-55,5 53,5-62,5 59,0-69,4 63,2-76,4 68,0-83,3
0,40 0,38 0,35 0,33 0,31 0,30 0,30 0,29 0,28 0,28
8,8-8,8 16,6-16,6 36,1-42,9 24,8-28,1 50,4-62,2 64,2-83,9 77,7-106,2 98,0-135,6 116,3-170,0 134,9-202,3
29,6-29,6 44,4-44,4 57,4-62,8 74,3-84,6 94,1-11,8 112,8-139,4 131,2-168,7 157,0-205,0 179,5-246,4 202,9-285,6
Figura 4.7.a. Schema de calcul a lungimii curbei verticale convexe (S>L).
Influenţa înclinării drumului asupra distanţei de vizibilitate. În cazul unui drum înclinat,
distanţa de vizibilitate se calculează cu formula:
( )ifvL
+=
254
2
, (4.14)
71

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
unde i este panta înclinarea drumului, exprimată în %. Distanţa de vizibilitate la frânare la
urcarea pantei este mai scurtă, iar la coborârea ei mai lungă decât la deplasarea pe un drum
orizontal.
Lungimea minimă a curbei verticale convexe se determină în funcţie de lungimea de
vizibilitate. În relaţia de calcul a lungimii L a curbei parabolice verticale se include diferenţa
A, a înclinărilor tangentelor şi distanţa de vizibilitate S, care reprezintă proiecţia orizontală a
razei de vedere. h1 reprezintă înălţimea ochilor conducătorilor auto, iar h2 înălţimea
obiectului.
Măsurarea distanţei de vizibilitate la frânare. Pentru curbele convexe, L depinde de
caracteristicile fundamentale, exprimate ca:
( )221
2
200 hh
SAL
+
⋅= , pentru LS ≤ (4.15)
( )A
hhSL
2
21200 +−= pentru (4.16) LS ≥
În determinarea distanţei de vizibilitate obţinută din proiectarea geometrică, se presupune
că înălţimea ochilor conducătorului auto este de aproximativ 1070 mm de la nivelul solului.
Înălţimea obiectului staţionar pe care conducătorul trebuie să-l ocolească se presupune a fi de
150 mm. Cu aceste valori se obţin, pentru lungimea de vizibilitate valorile din tabelul 4.7.
Tabelul 4.7.
Valoarea curburii verticale K [lungime, m/% din A]
Viteza de proiectar
e km/h
Viteza admisă km/h
Coeficient de frecare
f
Spaţiu de frânare pe drum orizontal,
m Calculată Rotunjită
30 40 50 60 70 80 90
100 110 120
30-30 40-40 47-50 55-60 63-70 70-80 77-90
85-100 91-110 98-120
0,40 0,38 0,35 0,33 0,31 0,30 0,30 0,29 0,28 0,28
29,6-29,6 44,4-44,4 57,4-62,8 74,3-84,6 94,1-11,8
112,8-139,4 131,2-168,7 157,0-205,0 179,5-246,4 202,9-285,6
2,17-2,17 4,88-4,88 8,16-9,76
13,66-17,72 21,92-30,39 31,49-48,10 42,61-70,44
61,01-104,02 79,75-150,28
101,90-201,90
3-3 5-5
9-10 14-18 22-31 32-49 43-71
62-105 80-151
102-202 Se constată că, este de preferat să se folosească o lungime mai mare a curbei pentru a
echilibra lucrările de terasament sau să se prevadă condiţii de operare mai bune şi încadrare
estetică în teren.
72

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
Figura 4.7.a. corespunde cazului în care lungimea de vizibilitate este mai mare ca
lungimea curbei verticale S>L, iar figura 4.8.a. prezintă atât cazul S>L, cât şi situaţia inversă
S<L.
Figura 4.8. Distanţa de vizibilitate
Lungimea minimă a curbei verticale convexe, care asigură lungimea de vizibilitate
necesară poate fi determinată şi cu relaţiile următoare:
În cazul curbelor verticale concave nu există un criteriu general valabil pentru alegerea
lungimii lor. În mod obişnuit, se ţine seama de următoarele elemente: lungimea de vizibilitate
noaptea la cuplarea farurilor: uşurarea conducerii autovehiculului; reglarea scurgerii apei;
vizibilitatea în întregime.
Drept criteriu de bază se alege lungimea de vizibilitate la cuplarea farurilor, figura 4.8.b,
care este egală cu lungimea iluminării drumului în condiţii de noapte.
Astfel:
( )βtgShSA
L⋅+
=200
2
, pentru LS ≤ (4.17)
( )A
tgShSL β⋅+−=
2002 . pentru LS ≥ (4.18)
Schimbarea poziţiei pe verticală a automobilului influenţează în mare măsură confortul,
în cazul curbelor verticale concave, deoarece în acest caz acţionează forţa de greutate şi forţa
de inerţie. S-a stabilit că există confort pentru o acceleraţie sub 3 m/s2. Din această condiţie se
obţine pentru lungimea curbei verticale concave,
390
2AvL = (4.19)
unde v reprezintă viteza de proiectare, km/h.
73

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
Valorile recomandate pentru calculul lungimii de vizibilitate în cazul curbelor concave
sunt date în tabelul 4.8.
2. Depăşirea în condiţii de deplină siguranţă. Un număr mare de străzi au doar două benzi
de circulaţie, pentru mişcarea fluxurilor de trafic în sensuri opuse. În această situaţie, este
necesar ca în cazul depăşirilor să se folosească banda opusă de circulaţie.
Pentru a depăşi vehiculele lente în condiţii de siguranţă, conducătorul vehiculului care
depăşeşte trebuie să poată vedea suficient de departe în faţa vehiculului pe banda opusă pentru
a dispune de suficient timp pentru a depăşi înainte de întâlnirea cu un vehicul din sens opus.
Distanţa totală cerută pentru manevra de depăşire se numeşte lungimea de vizibilitate de
siguranţă.
Cercetările experimentale, desfăşurate de-a lungul anilor, au stabilit valorile din tabelul
4.9. pentru cazul curbelor verticale convexe.
Tabelul 4.8.
Valoarea curburii verticale K [lungime, m/% din A]
Viteza de proiectare
[km/h]
Viteza admisă [km/h]
Coeficient de frecare
f
Spaţiu de frânare pe drum
orizontal, [m] Calculată Rotunjită
30 40 50 60 70 80 90
100 110 120
30-30 40-40 47-50 55-60 63-70 70-80 77-90
85-100 91-110 98-120
0,40 0,38 0,35 0,33 0,31 0,30 0,30 0,29 0,28 0,28
29,6-29,6 44,4-44,4 57,4-62,8 74,3-84,6 94,1-11,8
112,8-139,4 131,2-168,7 157,0-205,0 179,5-246,4 202,9-285,6
3,88-3,88 7,11-7,11
10,20-11,54 14,45-17,12 19,62-24,08 24,62-37,86 29,62-39,95 36,71-50,06 42,95-61,68 49,47-72,72
4-4 8-8
11-12 15-18 20-25 25-32 30-40 37-51 43-62 50-73
Tabelul 4.9
Viteza de proiectare [km/h]
Lungimea minimă de vizibilitate de siguranţă pentru proiectare, [m]
Valoarea curburii verticale K
[lungime, m/% din A] rotunjită
30 40 50 60 70 80 90
100 110 120
217 285 345 407 482 541 605 670 728 792
50 90
130 180 250 310 390 480 570 670
74

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
Valorile au fost obţinute pentru h1=1070 mm, h2=1300 mm. Cu aceste valori şi lungimea
minimă de vizibilitate prezentată în tabelul 4.9. se poate calcula lungimea minimă a curbei
verticale pentru o valoare dată a diferenţei înclinărilor A şi a vitezei de proiectare.
Lungimea minimă a curbei verticale care să asigure depăşirea poate fi , de asemenea
calculată cu ajutorul ratei curburii verticale/% din A, K.
Figura 4.9. Profil transversal în rambleu
Figura 4.10. Profil transversal în debleu
Distanţa de vizibilitate în plan orizontal de-a lungul interiorului unei curbe trebuie să fie
limitată de obstrucţionarea de către garduri, maluri sau alte caracteristici topografice.
75

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
4.3.2. Profilul transversal al drumului
Profilul transversal al drumului reprezintă o secţiune verticală prin corpul drumului într-un
punct oarecare de pe traseu, după un plan perpendicular pe axa sa longitudinală.
Profilul transversal cuprinde o linie a terenului şi o linie a proiectului (drumului). La
drumurile în umplutură linia proiectului se află deasupra liniei terenului natural şi poartă
denumirea de profil transversal în rambleu, figura 4.19 iar la drumurile în săpătură linia
proiectului se află sub linia terenului natural şi se numeşte profil transversal în debleu, figura
4.20.
Combinarea celor două tipuri, alcătuieşte profilul transversal mixt, figura 4.11.
Într-un profil transversal se observă porţiuni orizontale sau aproape orizontale numite
banchete şi porţiuni înclinate, taluzuri. Înclinarea sau panta taluzului se exprimă prin valoarea
numerică a tangentei unghiului pe care îl face taluzul cu orizontala. Ea se exprimă prin
raportul 1:n.
Înclinarea taluzului depinde de felul pământului în care se execută şi adâncimea debleului
sau înălţimea rambleului. Pentru ramblee şi debleurile mici se recomandă a se executa taluzuri
cu înclinări 1:2; 1:3 şi chiar mai mici. Pentru ramblee cuprinse între 1 şi 10 metri înălţime,
funcţie de natura pământului se adoptă taluzuri cu înclinarea 2:3; în aceleaşi condiţii pentru
debleurile, taluzurile au înclinarea de 1:1.
Figura 4.11. Profil transversal mixt
Bancheta cea mai importantă este platforma drumului, care cuprinde:
• partea centrală, consolidată în vederea circulaţiei numită parte carosabilă sau cale;
76

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
• acostamentele, de o parte şi cealaltă a căii, fâşii cuprinse între marginile căii şi
muchiile platformei.
În mod obişnuit, o parte din acostament care încadrează calea este consolidată şi se
numeşte bandă de încadrare şi face parte din lăţimea acostamentului. Rolul acesteia este de a
mări lăţimea utilă pe care se poate efectua circulaţia, în special în cazul întâlnirilor şi
depăşirilor de autovehicule.
Rolul acostamentelor este:
• să limiteze partea carosabilă;
• să servească pentru depozitarea de materiale de întreţinere;
• să permită autovehiculelor defecte să staţioneze temporar pentru a nu bloca un fir de
circulaţie;
• să se poată amplasa pe ele o serie de elemente accesorii ale drumului (borne apărătoare,
parapeţi);
• să permită, în caz de necesitate, lărgirea părţii carosabile;
• să asigura scurgerea apei de pe partea carosabilă.
Figura 4.12. Suprastructura drumului
Infrastructura drumului cuprinde terasamentele (lucrările de pământ), podurile şi podeţele
(lucrări de artă) şi lucrările de consolidare, protecţie sau asanare (ziduri de sprijin, ziduri de
căptuşire, drenuri etc.)
Suprastructura care cuprinde corpul şoselei, figura 4.12.
Partea centrală, consolidată, în vederea înlesnirii circulaţiei, formează corpul şoselei.
Sistemul folosit în mod obişnuit la construcţia căii este aşa numitul sistem roman care
constă din executarea, de straturi, a corpului şoselei. Pachetul de straturi ce formează corpul
şoselei se numeşte sistem rutier.
77

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
Stratul sau straturile de la suprafaţă care suportă direct acţiunea traficului se numeşte
îmbrăcăminte.
4.3.3. Elementele geometrice ale planului traseului (aliniamentul orizontal)
Prin traseu se poate înţelege:
• Intersecţia planului generat de verticalele care trec prin mijlocul drumului cu linia
terenului sau,
• Proiecţia axei drumului pe un plan orizontal.
Figura 4.13. Planul traseului şi profilul vertical
Planul traseului se compune dintr-o succesiune de părţi rectilinii – aliniamente – şi părţi
curbilinii – curbe, figura 4.13.
Dacă în cazul liniilor ferate aliniamentele pot avea orice lungime, în cazul drumurilor
rutiere aceasta trebuie limitată, din motive estetice şi de siguranţă, la maximum 3 – 4 km.
Dacă profilul longitudinal prezintă variaţii care evită monotonia, lungimea aliniamentelor
poate fi sporită.
78

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
Faţă de aliniamentele prea lungi, curbele prezintă uneori avantaje tehnice, economice şi
estetice. Prin introducerea lor judicioasă se asigură înscrierea firească în teren şi încadrarea
traseului în peisajul înconjurător.
În cazul aliniamentelor de lungime corespunzătoare şi a unei anumite frecvenţe şi
succesiuni de curbe, orbirea conducătorului auto, în timpul nopţii de către luminile
autovehiculelor care circulă din sens opus, mai ales la depăşiri numeroase, este mult mai
redusă decât în cazul aliniamentelor lungi. De asemenea, în cazul unor astfel de trasee, creşte
siguranţa circulaţiei ca urmare a menţinerii încordate a atenţiei conducătorilor auto, datorită
manevrelor care trebuie efectuate.
Tabelul 4.10.
Viteza de proiectare
Valoarea maximă pentru it
Valoarea maximă pentru ϕt
Valoarea tti ϕ+
Raza minimă calculată
Raza minimă rotunjită
120 30 40 50 60 70 80 90 100 110 120 30 40 50 60 70 80 90 100 110 120 30 40 50 60 70 80 90 100 110 120
0,06 0,08 0,08 0,08 0,08 0,08 0,08 0,08 0,08 0,08 0,06 0,01 0,01 0,01 0,01 0,01 0,01 0,01 0,01 0,01 0,01 0,12 0,12 0,12 0,12 0,12 0,12 0,12 0,12 0,12 0,12
0,09 0,17 0,17 0,16 0,15 0,14 0,14 0,13 0,12 0,11 0,09 0,17 0,17 0,16 0,15 0,14 0,14 0,13 0,12 0,11 0,09 0,17 0,17 0,16 0,15 0,14 0,14 0,13 0,12 0,11 0,09
0,15 0,25 0,25 0,24 0,23 0,22 0,22 0,21 0,20 0,19 0,17 0,27 0,27 0,26 0,25 024 024 0,23 0,22 0,21 0,19 0,29 0,29 0,28 0,27 0,26 0,26 0,25 0,24 0,23 0,21
755,9 28,3 50,4 82,0 123,2 175,4 229,1 303,7 393,7 501,5 667,0 26,2 46,7 75,7 113,4 160,8 210,0 277,3 357,9 453,7 596,8 24,4 43,4 70,3 105,0 148,4 193,8 255,1 328,1 414,2 539,9
755 30 50 80 125 175 230 305 395 500 665 25 45 75 115 160 210 275 360 455 595 25 45 70 105 150 195 255 330 415 540
79

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
Introducerea curbelor prezintă şi o serie de dezavantaje:
• lungimea traseului se măreşte şi această sporire poate deveni importantă la un număr mare de curbe;
• confortul şi siguranţa circulaţiei sunt mult reduse în curbe, mai ales pentru autovehiculele care circulă cu viteze mari, când pot să apară derapări şi răsturnări ale autovehiculelor;
• vizibilitatea în curbe se micşorează, în special, în cazul terenurilor acoperite (zone
împădurite, debleuri etc.); asigurarea vizibilităţii în curbă necesită lucrări suplimentare
de terasament, defrişări şi exproprieri;
• în vederea asigurării curburilor şi înclinărilor transversale corespunzătoare sunt
necesare lucrări de un volum mare de terasament şi de structură.
O atenţie deosebită, la proiectarea drumurilor, se acordă corelării corecte a vitezei de
proiectare cu curbura drumului şi înclinarea transversală a curbelor în plan orizontal,
figura 4.14.
Figura 4.14. Forţele ce acţionează la deplasarea pe un drum înclinat
80

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
Figura 4.15. Dezvoltarea supraînălţării drumului
Racordarea aliniamentelor se face cu ajutorul curbelor de rază foarte mare.
Elementele ce limitează raza de curbură:
• stabilitatea;
• înscrierea autovehiculelor lungi;
• vizibilitatea în zonele de debleu în curbă.
Pentru a examina stabilitatea autovehiculelor, în curbă se consideră un autovehicul care
circulă într-o curbă de rază R, supraînălţată cu unghiul α, care reprezintă panta transversală,
figura 4.15
Pentru fiecare viteză de proiectare există o valoare limită a razei de curbură minime sau
curburii maxime, care se determină în funcţie de înclinarea transversală maximă it a curbei şi
a valorii maxime a coeficientului de aderenţă ϕt în direcţie transversală.
Asupra autovehiculului acţionează forţa de greutate G, forţele de frecare Ff, forţa
centrifugală Fc. Din dinamica autovehiculelor se poate scrie echilibrul forţelor:
αααϕα cosRg
GvsinRg
GvcosGsinGv
2
v
2
t ⋅=⎟⎟
⎠
⎞⎜⎜⎝
⎛⋅
++ . (4.20)
Se obţine, pentru raza de virare minimă, în condiţiile ecuaţiei precedente,
( )ttv ig
vR
+=
ϕ
2
, [m/s] sau (4.21)
( )ttv i
vR
+=
ϕ127
2
. [km/h]. (4.22)
81

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
Valorile limită determinate pentru it şi ϕt sunt prezentate în tabelul 4.10.
Figura 4.16. Corelarea lungimii de vizibilitate cu raza minimă a curbei
Raza minimă R a curbei trebuie să se coreleze cu lungimea de vizibilitate S pentru frânare
şi distanţa m de la axa benzii interioare a curbei până la zona periculoasă, figura 4.16.
UTIL
Bibliografie: 1.FLOREA, D., ş.a. Managementul traficului rutier, Ed. Universităţii Transilvania din Braşov, 2000 2. POPA, D. ş.a.: Optimizarea transportului urban, Editura Tehnică, Bucureşti, 1976 3.CRIŞAN, V.: Trafic rutier - Fluenţă şi siguranţă maximă, poluare minimă, Editura Facla, Timişoara, 1983 ***Colecţia de Standarde
82

5. PARAMETRII DE BAZĂ AI TRAFICULUI RUTIER
5.1. INTRODUCERE
Cercetarea circulaţiei rutiere a demonstrat că se impune o analiză minuţioasă pentru
identificarea parametrilor de mişcare a vehiculelor, parametrii ce depind de o serie de aspecte
cum ar fi: direcţia de deplasare, alternanţa cererii de transport pe durata unei zile, localizarea
arterei în teritoriu, tipul drumului şi zonei analizate.
Parametrii fundamentali folosiţi în managementul fluxurilor de trafic sunt dependenţi de
conducătorul auto, vehicul şi caracteristicile geometrice ale drumului. Cei mai cunoscuţi
parametri sunt:
1. tăria traficului rutier, q exprimată în vehicule etalon/oră/bandă de circulaţie;
2. densitatea traficului rutier, K exprimată în vehicule etalon/km/bandă de circulaţie;
3. viteza, v, exprimată în km/h;
4. intervalele dintre autovehicule măsurate în timp sau în spaţiu.
În legătură cu parametrul tăria traficului trebuie cercetată noţiunea de cerere de trafic, care
reprezintă volumul de trafic ce se produce într-o anumită amenajare rutieră, în anumite
condiţii de deplasare.
Atunci când nu există restricţii, cererea este egală cu capacitatea de circulaţie. În cazul în
care cererea depăşeşte capacitatea de circulaţie, rezultatul se concretizează în apariţia cozilor
şi a blocajelor de circulaţie, iar tăria traficului măsurată va fi mai mică decât cererea.
În aplicaţiile din sistemele avansate de transport rutier trebuie făcută astfel, o distincţie
clară între aceste două noţiuni. În scopul luării unor decizii optime, sistemele de avertizare şi
de control al traficului necesită ca cererea să poată fi anticipată pe anumite porţiuni de drum şi
la un anumit moment, nu doar volumele de trafic să fie cunoscute. De exemplu, în cazul în
care automobiliştii sunt sfătuiţi să folosească o rută alternativă, trebuie să ştie că pe acea rută
cererea nu depăşeşte capacitatea de circulaţie.
Din nefericire, însă, valorile cererii sunt foarte greu de obţinut prin măsurători directe.
Metodele cele mai folosite sunt cele bazate pe cercetarea datelor aşa numite „istorice”, date
deja înregistrate.
Volumele de trafic şi intervalele de timp dintre vehicule pot fi măsurate manual folosind
operatori umani sau folosind o diversitate de echipamente dintre care tuburile pneumatice şi
buclele inductive sunt cele mai cunoscute.
Buclele inductive detectează prezenţa vehiculelor prin schimbarea proprietăţilor electrice
ale buclei atunci când o masă metalică (de exemplu un vehicul) trece peste ele. Buclele
83

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
inductive raportează, de obicei, datele la fiecare 20 de secunde astfel încât pot fi folosite
pentru a număra vehiculele care au trecut în ultimele 20 de secunde. De asemenea, ele
memorează şi ponderea timpului cât bucla a fost ocupată de vehicule (sau cât vehiculele au
fost detectate). Astfel, dacă vehiculele au fost detectate deasupra buclei 10 secunde în ultimul
ciclu de 20 de secunde acesta va raporta ca 50% ocupare (10/20)x 100 = 50%.
Întrucât densitatea nu este măsurată în mod direct, sisteme video de colectare a datelor
perfecţionate pot prezenta noi oportunităţi de înregistrare a numărului de vehicule într-o
secţiune a drumului.
Inginerul sau specialistul de trafic trebuie să-şi dezvolte capacitatea de înţelegere a
modului de operare în interiorul fluxurilor de trafic. În acelaşi timp, pe baza ecuaţiilor
fundamentale ale fluxurilor de trafic, trebuie realizate anumite diagrame ce pot fi utile pentru
vizualizarea dinamicii traficului rutier.
În general, fluxurile de trafic nu sunt uniforme, ele fiind variabile în timp şi în spaţiu. Din
acest motiv măsurarea variabilelor de interes pentru teoria fluxurilor de trafic constă în
eşantionarea variabilelor aleatoare. De fapt, caracteristicile traficului sunt valori medii ale
distribuţiilor statistice şi nicidecum numere absolute.
Analizele de trafic pot fi realizate fie la nivel microscopic, caz în care vehiculele sunt
considerate entităţi individuale şi variabilele corespunzătoare sunt intervalele în timp dintre
vehicule, vitezele vehiculelor individuale şi distanţele dintre vehicule.
În cazul analizei la nivel macroscopic este studiat comportamentul mediei grupului de
vehicule şi parametrii cercetaţi sunt reprezentaţi de tăria (intensitatea) şi densitatea traficului.
Parametrii enumeraţi sunt folosiţi pentru a caracteriza deplasarea vehiculelor care
formează un fluxurile rutiere continui de pe autostradă sau arterele coordonate din zonele
urbane şi care nu sunt afectate de dispozitivele de control al traficului – semne sau semnale de
circulaţie.
În cazul în care există astfel de dispozitive trebuie cercetaţi alţi parametri ai traficului,
cum ar fi întârzierile, opririle şi mişcările de virare. O parte dintre aceste mărimi pot fi
măsurate direct, în timp real, iar o altă parte trebuie determinaţi matematic sau estimaţi
folosind parametrii măsurabili sau din analiza datelor deja înregistrate.
Parametrii traficului rutier pot fi incluşi în următoarele grupe de indicatori, astfel:
• Indicatori de evaluare cantitativă care arată cât de mult sau care este ponderea
traficului care se deplasează sau aşteaptă să se deplaseze. Această categorie de mărimi
include: volumele de trafic, cererea de trafic, intervalele de timp dintre vehicule.
84

• Indicatori de evaluare calitativă, arată calitatea fluenţei traficului. Pentru descrierea
calitativă a condiţiilor de operare este folosit termenul nivelul de serviciu, caracterizat
de factori ca viteza şi durata călătoriei, libertatea de mişcare (manevre), întreruperile
de trafic, confortul, comoditatea şi siguranţa traficului. Au fost elaborate proceduri de
analiză conform Highway Capacity Manual pentru fiecare tip de amenajare având
definite şase niveluri de serviciu notate de la A la F, A fiind cel mai bun iar F cel mai
nefavorabil nivel de serviciu.
• Indicatorii relativi la mişcare arată de unde şi încotro se deplasează fluxul de trafic.
• Indicatori de compoziţie/clasificare care arată ce fel de trafic se deplasează.
5.2.FORMAREA FLUXURILOR RUTIERE SAU CURENŢILOR DE CIRCULAŢIE
Când un observator înregistrează în intervalul [0,t] un număr N(t) de autovehicule care
traversează o porţiune oarecare de drum, se poate vorbi despre un flux rutier sau un curent de
circulaţie.
Când secţiunea drumului se referă la un drum cu mai multe benzi de circulaţie pe sens,
observarea se referă la o singură bandă de circulaţie, putând fi observat un singur vehicul la
un moment dat.
În cazul în care se înregistrează un flux important, reprezentarea poate fi realizată, ca în
figura 5.1, atât printr-o curbă discretă (sub forma unor trepte de înălţime egală cu unitatea şi
lăţime egală cu intervalul de timp dintre vehiculele care se urmăresc) cât şi continuu prin
„netezirea” acestei curbe în trepte cu ajutorul unei curbe continui.
Figura 5.1: Formarea unui flux rutier
85

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
Figura 5.2: Determinarea întârzierilor vehiculelor şi a numărului de vehicule din şir
Semnificaţia notaţiilor folosite în figura 5.1, este:
M(t) – numărul de vehicule exprimat ca funcţie discretă;
( )tM~ - numărul de vehicule, ca o funcţie continuă (există derivata ( )tN~ , ( )dt
tM~d );
( ) ( )dt
tM~dtq = - intensitatea traficului rutier;
Dacă se înregistrează curba sosirilor şi curba plecărilor într-o anumită locaţie pot fi
determinaţi parametrii unui şir, aşa cum este explicat în detaliu în capitolul privind teoria
şirurilor de aşteptare, figura 5.2.
În cele ce urmează se neglijează existenţa şi influenţa nodurilor de circulaţie (intersecţii,
pieţe, puncte de intrare pe autostrăzi etc) şi ca urmare, se va studia desfăşurarea traficului
rutier (a circulaţiei autovehiculelor) pe o anumită porţiune de drum, X şi într-un anumit
interval de timp, T.
5.2.1. Tăria traficului rutier
Tăria traficului sau volumul de trafic este o măsură cantitativă temporală, folosită
pentru exprimarea unor indicatori foarte importanţi în ingineria de trafic: Media zilnică de
trafic exprimată în vehicule per zi şi volumul orar sau intensitatea orară de trafic măsurat în
vehicule per oră. Alte unităţi de măsură importante se referă la tăria traficului corespunzătoare
unor intervale de timp mai mici decât ora, de exemplu 15 minute, pentru a determina un
volum orar echivalent, important în zonele în care sunt înregistrate perioade de vârf scurte.
86

Volumele de trafic sunt exprimate în termeni ai tăria traficului, (q) sau intensităţii
traficului, λ şi reprezintă numărul de vehicule care trec printr-o secţiune a drumului într-un
interval de timp.
Unităţile de măsură folosite în analize sunt vehicule/interval de timp. Când intervalul de
timp este de o secundă, se numeşte intensitatea traficului, iar când este de o oră se numeşte
tărie orară sau volum orar.
Figura 5.3. Observaţii locale efectuate asupra fluxurilor de trafic.
Pentru a caracteriza valorile de trafic pe termen lung, se poate folosi volumul anual sau
volumul zilnic.
Tăria orară a traficului, q poate fi calculată ca inversul intervalului mediu de timp, t dintre
vehiculele unui flux rutier, măsurat în secunde per vehicul:
⎥⎦⎤
⎢⎣⎡= ora
etalonvehiculet
3600q . (5.1)
Pentru o bună înţelegere a acestui parametru este utilă urmărirea traiectoriilor (liniile de
mişcare) elementelor singulare (autovehicule) ale fluxului rutier care pot să se intersecteze,
doar atunci când sunt posibile depăşirile.
Tăria traficului rutier poate fi determinată prin observaţii locale (figura 5.3) atunci când
măsurătorile sunt efectuate se referă la o secţiune transversală precisă şi un anumit interval de
timp definit. Acest tip de măsurătoare se poate realiza asupra şi altor parametri de circulaţie.
Relaţia generală pentru stabilirea tăriei traficului rutier, q ia în considerare valorile
intervalelor de timp dintre autovehicule, ti iar, în cazul când nu se pot face astfel de
87

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
măsurători, se poate calcula un interval de timp mediu, t cunoscând intervalul total de
măsurare, T şi numărul de vehicule înregistrate în acest interval, astfel:
t1
tM1
1t
MTMq
iii
i====
∑∑. (5.2)
În ingineria de trafic, tăria sau intensitatea traficului măsurată sau estimată poate fi folosită
în aplicaţii de tipul următor:
• Dezvoltarea modelelor de prognoză a traficului rutier;
• Analiza datelor privind accidentele de circulaţie;
• Determinarea locaţiilor pentru semnalizarea rutieră;
• Dezvoltarea cerinţelor de proiectare pentru artere rutiere noi sau pentru modernizarea
celor existente;
• Investigarea posibilităţilor de perfecţionare operaţională folosind analiza capacităţii de
circulaţie;
• Estimarea veniturilor provenind din taxe, etc.
5.2.2. Densitatea traficului rutier
Densitatea traficului, (K) exprimată în vehicule/interval de spaţiu.
Figura 5.4. Observaţii momentane efectuate asupra fluxurilor de trafic.
Mărimea este cunoscută şi sub denumirea de concentraţia traficului rutier, atunci când
intervalul de spaţiu este unitatea şi reprezintă numărul de vehicule localizate pe o bandă de
circulaţie pe lungimea specificată la un moment dat.
88

Măsurătorile care permit determinarea densităţii traficului rutier se mai numesc observaţii
momentane (figura 5.4) şi sunt efectuate la un moment precis determinat asupra unui segment
de drum.
Dacă măsurătoarea se efectuează prin simpla fotografiere a fluxului rutier, se poate afla, în
mod direct, densitatea traficului, K prin simpla numărare a vehiculelor aflate pe porţiunea de
drum analizată.
Pentru determinarea densităţii, în mod indirect, există două posibilităţi:
• cunoscând intervalele spaţiale dintre vehicule, si sau intervalul mediu s :
s1
sN1
1s
NXNK
iii
i=
⋅===
∑∑ (5.3)
• cunoscând tăria traficului şi viteza cu care se deplasează fluxul de vehicule.
O mărime asociată, frecvent, cu densitatea traficului rutier este gradul de ocupare a
benzii de circulaţie, mărime adimensională care arată ponderea (rata) timpului cât vehiculul
este prezent într-un punct specificat de pe o bandă de circulaţie. Această mărime nu trebuie
confundată cu gradul de ocupare al unui vehicul care se referă la numărul de persoane care se
află într-un autovehicul.
Ocuparea benzii de circulaţie este măsurată adesea folosind anumite variante de detectori
de prezenţă cum ar fi buclele inductive de detectare încorporate în îmbrăcămintea rutieră în
accesele intersecţiilor semaforizate sau la aproximativ fiecare 500 m de-a lungul fiecărei
benzi de pe autostradă.
5.2.3. Observaţii asupra vitezelor de circulaţie
Calităţii fluxurilor de trafic poate fi apreciată în funcţie de distanţa parcursă de acestea
într-un anumit interval de timp. Mişcarea vehiculelor din flux este descrisă astfel cu ajutorul
vitezei.
Viteza (v) reprezintă distanţa parcursă de un vehicul în unitatea de timp care este în
general m/sec sau km/h. Când se consideră un curent de trafic viteza medie poate fi descrisă
fie de viteza medie în timp sau viteza medie în spaţiu.
Distincţia între diferitele tipuri de viteze se poate face pe baza metodelor de măsurare
folosite.
Viteza instantanee a unui vehicul singular poate fi măsurată prin observarea atât în spaţiu
cât şi în timp a mişcării (figura 5.5) şi este definită astfel:
89

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
12
120tti tt
xxlimdtdxv
12 −−
==→−
. (5.4)
Dacă se urmăreşte determinarea vitezei unui flux rutier (compus din mai multe vehicule
având viteze diferite, dar apropiate) există mai multe posibilităţi de a calcula viteza medie a
grupului de vehicule.
O primă valoare medie se calculează pe baza observaţiilor asupra vitezei obţinute de un
observator staţionar (observaţie locală, linia orizontală din fig. 5.5) este numită viteză medie
locală, tv :
∑=
=N
1i
lil v
N1v . (5.5)
Cea de-a doua valoare medie rezultă din vitezele vehiculelor observate pe o porţiune de
drum de lungime X la un moment dat.
Figura 5.5. Observaţii locale şi momentane efectuate asupra vitezelor vehiculelor
În figura 5.5 reprezintă tangenta unghiului format de traiectoria fiecărui vehicul cu linia
verticală la momentul t.
O astfel de observaţie se poate obţine cu ajutorul unor fotografii aeriene făcute în
momente apropiate pentru a obţine vitezele tuturor vehiculelor din prima fotografie. Aceasta
măsurătoare se referă la viteza medie momentană:
∑=
=N
1i
mim v
N1v . (5.6)
90

O relaţie folosită pentru calculul acestei viteze este:
∑=
ii
m
tN1
Xv , (5.7)
unde ti este timpul necesar vehiculului i pentru a străbate distanţa X:
ii v
Xt = . (5.8)
Viteza medie momentană poate fi calculată ca medie armonică a vitezelor individuale
ale vehiculelor ce străbat o porţiune de drum:
∑
∑∑∑⋅=
⋅===
ii
iii ii
i
x vN1
vX
N1
X
vX
N1
X
tN1
Xv . (5.9)
Diferenţele dintre cele două metode de calcul a vitezelor medii pot fi ilustrate cu ajutorul exemplului următor.
t
p
d
s
t
f
b
Exemplu
Se consideră o pistă circulară având lungimea L = 1 km. Primul vehicul parcurge buclacu viteza de 40 km/h în timp ce al doilea vehicul circulă cu viteza de 60 km/h. Viteza mediea celor două bucle este de 50 km/h.
h/km50h/km6021h/km40
21vt =⋅+⋅=
Timp de o oră, un observator fix va observa de 40 de ori primul vehicul şi de 60 de oricel de-al doilea vehicul, deci viteza medie în acest caz este 52 km/h. Astfel, observareavitezelor înclină în favoarea vehiculelor mai rapide deoarece aceste vehicule vor fi observate mai frecvent.
Ştiind că numărul total al înregistrărilor este (40+60=100). rezultă 60401
h/km523616h/km60100h/km40
100v
Nv
iix =+=⋅+⋅=⋅= ∑ .
5.2.4. Intervale dintre vehicule
Intervalele dintre vehicule reprezintă parametrii cantitativi importanţi ai fluxurilor de
rafic, cu ajutorul cărora pot fi evaluate performanţele sistemului rutier sau nivelul de serviciu,
recum şi eficienţa semnalelor de trafic şi a staţiilor de taxare. Ele pot fi considerate în mod
iferit, funcţie de unitatea de măsură, ca intervale dintre vehicule măsurate în unităţi de timp
au intervale măsurate în unităţi de spaţiu.
Intervalul de timp dintre vehicule, (t) este o măsură a intervalului de timp necesar
recerii prin dreptul unui reper fix de pe marginea drumului a două vehicule consecutive ale
luxului rutier, de exemplu de la bara faţă (sau bara spate) a primului vehicul la bara faţă (sau
ara spate) a vehiculului urmăritor şi are ca unitate de măsură secunda.
91

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
Figura 5.6: Intervalele de timp dintre vehicule
Diagrama spaţiu-timp prezentată în figura 5.6 arată traiectoria fiecărui vehicul care trece
prin dreptul punctului de observare, precum şi cele două componente ale intervalului de timp
dintre vehicule:
• Golul temporal – intervalul de timp dintre vehicule, luând în considerare punctul cel mai
din spate al vehiculului urmărit şi punctul cel mai avansat al vehiculului urmăritor;
• Timp de ocupare – timpul necesar vehiculului pentru a traversa punctul de observare
luând în considerare punctul cel mai avansat şi punctul cel mai din spate al aceluiaşi
vehicul. Acest timp depinde de tipul vehiculului, dar şi de viteza de deplasare a acestuia.
Capacitatea de circulaţie a unui drum depinde în primul rând de prima componentă, golul
temporal, pe care conducătorii auto îl aleg pentru a se simţi în siguranţă şi este dependent de
timpul de reacţie şi de spaţiul de oprire al autovehiculului (dependent de performanţele
vehiculului şi de condiţiile de deplasare). De mărimea acestui interval depinde posibilitatea de
integrare a unui vehicul de pe un drum lateral într-un flux principal, depăşirea vehiculelor,
părăsirea unui flux rutier.
Măsura nivelului de serviciu este strâns legată de intervalele de timp dintre vehicule şi
poate fi exprimată în două moduri:
• ponderea intervalului de timp în care un vehicul este forţat să urmărească un alt
vehicul pe un drum cu două benzi de circulaţie;
• frecvenţa manevrelor de ajustare a vitezei de deplasare pe care le efectuează un
conducător auto pentru a menţine un interval de timp minim faţă de vehiculul din faţă.
92

Intervalul spaţial sau distanţa dintre vehicule adesea numit interspaţiul, (notat s)
(conform STAS 10144/5-89) reprezintă distanţa dintre punctele identice ale celor două
vehicule consecutive ale fluxului de trafic şi este exprimat în metri (figura 5.7).
Figura 5.7: Intervalele de spaţiu dintre vehicule
Interspaţiul poate fi considerat ca o vedere microscopică a densităţii. Diagrama spaţiu-timp
din figura 5.7 arată cele două componente ale intervalelor de spaţiu dintre vehiculele care
circulă pe un drum: lungimea vehiculului şi distanţa dintre vehicule (golul spaţial). Intervalele
dintre vehicule, ca şi distribuţia lor statistică, sunt folosite pentru dezvoltarea modelelor de
urmărire şi pentru investigarea stabilităţii fluxului rutier.
Acest parametru este folosit adesea pentru a caracteriza eficienţa unei amenajări rutiere şi
pentru a evalua efectele „înainte – după” ale intervenţiilor operaţionale. Pentru a putea
compara diferitele valori, este necesar ca acest parametru să fie calculat pentru fiecare direcţie
de deplasare cât şi pentru momente ale zilei comparabile.
Măsura utilizată pentru acest parametru se referă la randamentul de trecere definit ca
numărul de vehicul-kilometri de călătorie efectuaţi pe o anumită porţiune de drum, într-un
anumit interval de timp. Se determină prin înregistrarea tăriei traficului pentru fiecare secţiune
a unei artere situate între punctele de intrare şi ieşire.
93

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
5.3. CORELAŢII ÎNTRE PARAMETRII FLUXURILOR RUTIERE
Încă din 1935, Geenshields a prezentat un model al fluxurilor rutiere stabilind o corelaţie
între parametrii de bază ai traficului rutier: tărie, densitate şi viteză şi exprimată prin ecuaţia:
xvKq ⋅= (5.10)
ce reprezintă diagrama fundamentală a traficului rutier, figura 5.8.
Acest model simplu, presupune o variaţie liniară între viteză (de fapt, media vitezelor în
funcţie de spaţiu) şi densitate.
Figura 5.8: Diagrama fundamentală a traficului rutier.
Cei doi parametri ai modelului simplificat sunt viteza fluxului liber vf şi densitatea sa
maximă numita şi densitatea condiţiei de ambuteiaj, Kj.
Viteza fluxului liber este viteza curentului de trafic pentru care tăria tinde spre zero în
condiţiile traficului liber (conducătorii auto pot circula cu viteza dorită) în timp ce densitatea
de ambuteiaj se produce când tăria şi viteza tind spre zero.
Tăriei maxime, qmax îi corespund valori optime ale vitezei, vo şi densităţii, Ko.
Corelaţia liniară densitate-viteză este dată de relaţia:
⎟⎟⎠
⎞⎜⎜⎝
⎛−⋅=
jf K
K1vv . (5.11)
Această relaţie indică faptul că viteza se apropie de viteza fluxului liber, vf când densitatea
şi deci şi fluxul de trafic se apropie de valoarea zero (K→0 şi q→0).
Dacă densitatea şi deci şi fluxul cresc, vitezele scad până ce fluxul este maxim, qmax, iar
viteza şi densitatea tind spre valoarea optimă (v→vo şi K→Ko).
94

Creşterea, în continuare a densităţii traficului are ca rezultat reducerea vitezei, dar şi a
tăriei traficului, până când densitatea înregistrează valoarea maximă Kj şi, corespunzător,
viteza şi tăria valoarea zero (v→0 şi q→0).
De reţinut că tăria poate fi reprezentată în diagrama tărie-viteză ca o curbă având valoarea
maximă tangentă la curba diagramei densitate – viteză în punctul de valoare optimă a celor
două mărimi (Ko şi vo).
Combinând ecuaţiile anterioare se obţine corelaţia dintre tărie, densitate şi viteză de
forma:
2
j
ff K
KvKvq ⋅−⋅= . (5.12)
Deoarece
0dKdq
= când K→Ko, (5.13)
se obţine valoarea optimă a densităţii Ko care va corespunde valorii maxime a tăriei traficului
rutier:
2K
K jo = . (5.14)
Din figura 5.9 se poate observa că în diagrama fundamentală, viteza medie a fluxului liber
este reprezentată de un vector tangent la curbă în originea sistemului, în timp ce, viteza
optimă este un vector ce trece prin punctul de maxim al curbei, qmax.
Figura 5.9: Variaţia tăriei traficului rutier în funcţie de viteza de deplasare
Figura 5.10 prezintă un exemplu bazat pe date experimentale pentru graficul densitate-
viteză, în care pentru valorile vitezelor de circulaţie uzuale se poate accepta o variaţie liniară.
95

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
Figura 5.10: Variaţia densităţii traficului rutier în funcţie de viteza de deplasare
Corelaţia tărie-viteză poate fi reprezentată în legătură cu diagrama densitate - viteză
datorită axei verticale comune. Ecuaţia pentru această corelaţie este de forma:
( 2f
f
j vvvvK
q −⋅⋅= ), (5.15)
iar pentru valorile optime
( ) oo2oof
f
jmax vKvvv
vK
q ⋅=−⋅⋅= . (5.16)
Pentru valoarea
2vv f
o = (5.17)
se obţine tăria maximă:
4vK
q fjmax
⋅= . (5.18)
În modelul simplificat al lui Greenshields, această valoare a tăriei maxime se obţine doar
atunci când există o relaţie liniară între densitate şi viteză. Modelul liniar necesită cunoaşterea
a doi parametri, viteza fluxului liber vf, care poate fi observată uşor în teren (de exemplu,
viteza unui flux de trafic de valoare scăzută) şi densitatea care, în general este mai greu de
estimat.
O valoare rezonabilă pentru densitatea de ambuteiaj Kj rezultă considerând că pentru
densitatea maximă fiecare vehicul ocupă 7,5 m din spaţiul drumului. Astfel, în cazul valorilor
experimentale valoarea optimă a densităţii este diferită de Kj /2.
96

6. PROIECTAREA INTERSECŢIILOR
6.1. INTRODUCERE
Proiectarea intersecţiilor de drumuri implică patru factori de bază:
• factorul uman,
• factori operaţionali sau de trafic,
• factori fizici şi
• factori economici.
Pe lângă acestea trebuie amintite următoarele criterii de proiectare:
• Tipul de control al traficului (fără control, semne, semnale, marcaje de circulaţie);
• Analiza capacităţii de circulaţie (nivelul de serviciu, numărul benzilor de acces în
intersecţie, mişcările şi benzile destinate virării);
• Măsura în care este controlat accesul în intersecţie, pentru o anumită amenajare
rutieră;
• Traficul pietonal;
• Traficul cu biciclete şi
• Cerinţele de iluminare.
Proiectarea intersecţiilor de drumuri, situate în acelaşi plan, necesită înţelegerea atât a
principiilor inginerie de trafic cât şi a celor de inginerie civilă. Modul de operare al unei
intersecţii este influenţat de elemente de bază precum:
• Capacitatea de circulaţie;
• Lungimea cozilor şi întârzierile pe care le produc;
• Numărul accidentelor de circulaţie ce se pot produce;
• Caracteristicile vitezei de operare;
• Tipul de control al traficului.
Amplasarea unei intersecţiei este definită de următoarele caracteristici:
• Profilul orizontal; • Profilul vertical; • Secţiunile transversale ale braţelor intersecţiei; • Îmbrăcămintea rutieră; • Tipul sistemului de drenaj. Proiectarea corespunzătoare a intersecţiilor, necesită integrarea optimă a tuturor acestor
factori în scopul prevenirii unor eventuale puncte de conflict sau accidente în intersecţii care,
pot fi inerente atunci când fluxurile de trafic sunt în interacţiune.
97

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
6.2. PRINCIPII DE PROIECTARE A INTERSECŢIILOR
Caracteristica generală a unei intersecţii este reprezentată de faptul că participanţii la
trafic, vehicule, biciclişti şi pietoni trebuie să împartă, adesea simultan, un spaţiu comun.
Un obiectiv important, cu privire la proiectarea intersecţiilor, al inginerilor de trafic,
constă în diminuarea punctelor de conflict ce rezultă din mişcările multiple, influenţate de
costurile privind mentenanţa, factorii de mediu şi gradul de dificultate al implementării.
6.2.1. Factori ce influenţează proiectarea intersecţiilor
6.2.1.1. Factorul uman
Comportamentul conducătorului auto ca şi a celorlalţi participanţi la trafic este discutată
în cadrul capitolului „Factorul uman”, iar răspunsul acestuia reprezintă un factor important în
proiectare intersecţiilor.
Tabelul 6.1: Valori recomandate pentru caracteristicile factorului uman
Factor uman Valori de proiectare Elemente de proiectare afectate
Timpul de percepţie - reacţie 2,0 – 4,0 secunde Distanţa de vizibilitate în intersecţie
Interval admisibil între vehicule 5,5 – 7,5 secunde Distanţa de vizibilitate în intersecţie
Înălţime ochi automobilist 1,05 m Distanţa de vizibilitate
Vitezele de mers ale pietonilor 1 – 1,5 m/s Amenajări pentru pietoni În tabelul 6.1 sunt prezentate valori recomandate ale caracteristicilor factorului uman
importante pentru proiectarea intersecţiilor.
Tabelul 6.2: Caracteristicile vehiculului aplicabile pentru intersecţiile cu fluxuri canalizate
Caracteristicile vehiculului Elementele de proiectare ale intersecţiei afectate
Lungimea Lungimea sectorului de stocaj
Lăţimea benzilor de circulaţie Lăţimea
Razele de virare
Înălţimea Amplasarea semnelor şi semnalelor suspendate
Instalarea
Raza de racordare
Caracteristici geometrice
Ampatamentul
Lăţimea benzilor de virare
Lungimea sectorului de accelerare şi a benzilor Capacitatea de accelerare Intervale admisibile
Lungimi de decelerare şi sectorul de deviere Caracteristici operaţionale Capacitatea de
decelerare şi de frânare Distanţa de vizibilitate la oprire
98

Pentru timpul de percepţie-reacţie de 2,5 secunde este folosită ca mărime de intrare pentru
determinarea distanţei de vizibilitate în intersecţie. Datorită importanţei sporite a controlului
intersecţiilor urbane aglomerate pot fi adoptate şi valori mai mici ca de exemplu 2 secunde.
6.2.1.2. Caracteristicile vehiculelor
Mărimea şi manevrabilitatea vehiculelor reprezintă factori de bază în proiectarea
intersecţiei în special atunci când au fost selectate caracteristicile tipului de canalizare a
fluxurilor de trafic. Datorită importanţei în proiectarea drumurilor în general şi a intersecţiilor
în special, caracteristicile vehiculelor sunt abordate separat şi sunt prezentate în tabelul 6.2. În
alegerea vehiculului cel mai potrivit, inginerul de trafic trebuie să acorde atenţie sporită
compoziţiei fluxurilor rutiere.
6.2.1.3. Condiţiile de mediu
Printre factorii care influenţează modul de proiectare a intersecţiilor la nivel, o importanţă
deosebită au: categoria drumului, amenajările existente în împrejurimi şi condiţiile climaterice
în zonă. În aplicarea unor standarde de proiectare adecvate este esenţial ca abordarea să fie
flexibilă şi respectând conceptul de „proiectare senzitivă” în acord cu categoriile de drumuri.
Arterele principale asigură deplasarea unor volume mari de trafic, operarea vehiculelor cu
viteze superioare şi adesea circulaţia automobiliştilor mai puţin familiarizaţi cu aceste
categorii de drumuri. Prezenţa vehiculelor grele, autocamioane şi autobuze poate genera un
nivel de serviciu ridicat.
Canalizarea fluxurilor rutiere ar trebui să reprezinte soluţia optimă de asigurare a
continuităţii mişcării, dar adesea aceasta generează noi conflicte între participanţii la trafic şi
un impact nefavorabil asupra mediului înconjurător. Distanţele de vizibilitate reprezintă, de
asemenea un element important, iar dispozitivele de control al traficului ca şi semnele şi
marcajele de circulaţie trebuie folosite cu prudenţă.
Tipul zonei, precum şi modul de folosire a zonelor învecinate, guvernează modul de
proiectare a unei intersecţii. De exemplu, în zonele urbane participanţii la trafic sunt alături de
automobilişti, diferite categorii, ca: fluxuri de pietoni, fluxuri de călători, biciclişti,
taximetrişti, vehicule ce urmează a fi parcate, etc. În zonele rezidenţiale, inginerii de trafic i-
au în considerare, pe lângă categoriile amintite, nevoile de traversare în vecinătatea şcolilor ca
şi bicicliştii.
Clima locală poate influenţa deciziile de proiectare. De exemplu, o zonă cu ceaţă necesită
soluţii speciale pentru asigurarea vizibilităţii, iar ploile torenţiale frecvente reduc observarea
semnelor şi marcajelor, dar şi aderenţa automobilului.
99

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
6.2.2. Tipuri de mişcări şi conflicte ale fluxurilor rutiere
6.2.2.1. Tipuri de intersecţii
Funcţie de mişcările efectuate intersecţiile pot fi de tipul prezentat în tabelul 6.3.
Tabelul 6.3: Tipuri de intersecţii
Intersecţii cu trei braţe
Intersecţii în T
Intersecţii în Y
Intersecţii cu patru braţe
Intersecţii în
unghi drept
Intersecţii
oblice
Intersecţii
decalate
Intersecţii cu mai
multe braţe
Intersecţii în
sens
giratoriu
Mişcările ce pot fi efectuate în intersecţii sunt cunoscute cu denumirile:
• Mişcări de traversare sau curenţi secanţi - normali dacă unghiul de intersecţie are
valorile 750 – 1200 sau oblici, dacă unghiul de intersecţie are valorile 00 – 750. Se
100

recomandă evitarea, pe cât posibil, a intersecţiilor oblice. În cazul unghiurilor mai
mari de 1200 trebuie reproiectată intersecţia.
• Mişcări de convergenţă sau curenţi de inserţie la stânga sau/şi la dreapta ;
• Mişcări de divergenţă sau curenţi divergenţi de ocolire;
Mişcări de împletire, care reprezintă o combinaţie între fluxurile de trafic de convergenţă
şi divergenţă care se deplasează în aceeaşi direcţie şi pot fi simple şi complexe.
Standardele şi manuale de proiectare a drumurilor prevăd detaliat cerinţele impuse fiecărei
ţări, pentru România, acesta fiind SR 10144 – 4/95. Tabelul 6.3 prezintă categoriile de
intersecţii funcţie de numărul de intrări sau braţe. Conflictele generate ca urmare a diferitelor
manevre efectuate în intersecţii pot conduce la o soluţie unică a caracteristicilor operaţionale.
Înţelegerea adecvată a acestor caracteristici cu accent pe elementele de siguranţă şi capacitate,
reprezintă elemente esenţiale ale proiectării intersecţiilor.
Siguranţa circulaţiei în intersecţii este influenţată de volumele de trafic întrucât creşterea
acestora se reflectă în creşterea numărului punctelor de conflict, dar şi de tipul de control.
Studiile au demonstrat că se produc tamponări mai frecvent în intersecţiile semaforizate decât
orice alt fel de intersecţii, dar şi utilizarea semnelor Stop şi Cedează trecerea tind să crească
frecvenţa accidentelor la traversarea intersecţiei.
Tabelul 6.4 prezintă lista unor condiţii care pot genera accidente de circulaţie şi,
corespunzător, măsurile de control şi de proiectare geometrică, pentru diminuarea acestora.
Tabelul 6.4: Condiţii şi acţiuni de reducere a numărului accidentelor
Condiţii şi caracteristici geometrice care contribuie la producerea accidentelor de
circulaţie
Acţiuni ale inginerilor de trafic care reduc numărul şi gravitatea accidentelor de
circulaţie
Distanţă de vizibilitate la intrarea în intersecţie necorespunzătoare Introducerea benzilor pentru viraj exclusive
Triunghiul de vizibilitate în intersecţie necorespunzător Realizarea unei scheme de control
Declivităţi extreme în intersecţii Îmbunătăţirea distanţei de vizibilitate
Control neadecvat al traficului Instalarea iluminatului
Intrări multiple Îndepărtarea obiectelor fixe
Prezenţa curbelor în intersecţii Creşterea razelor de virare
Numărul arterelor secundare învecinate sau al punctelor de acces
Raze de curbură necorespunzătoare
Benzi înguste
Aplicarea canalizării fluxurilor rutiere
Absenţa drenajelor şi risc de derapare Îmbunătăţirea instalaţiilor de drenare a apei şi realizarea unei suprafeţe rugoase.
101

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
6.2.2.2. Puncte de conflict
Manevrele efectuate în fluxurile de trafic ar trebui evitate atunci când ele creează confuzii
care pot conduce la apariţia problemelor privind siguranţa rutieră şi capacitatea de siguranţă.
Presupunând că toate mişcările ar fi posibile într-o intersecţie, numărul punctelor de
conflict, N se calculează în funcţie de numărul arterelor rutiere care se intersectează, n:
!nN = Tabelul 6.5: Numărul punctelor de conflict
Număr braţe intersecţie Numărul punctelor de conflict
3 6123!3 =⋅⋅=
4 241234!4 =⋅⋅⋅=
5 12012345!5 =⋅⋅⋅⋅=
Observând rata de creştere a numărului punctelor de conflict, se constată că, din acest
punct de vedere, sunt de preferat intersecţiile în T.
Luând în considerare relaţiile dintre ei, curenţii de trafic pot fi cele prezentate în tab. 6.6.
Tabelul 6.6: Tipuri de curenţi de trafic
Curenţi secanţi, normali Simbol:
Curenţi secanţi oblici
Curenţi de inserţie pe o
singură parte Simbol:
Curenţi de inserţie pe ambele părţi
Curenţi divergenţi de ocolire la stânga – la dreapta sau în
ambele părţi Simbol:
Curenţi paraleli
Curenţi de împletire între doi sau mai mulţi curenţi
Limitarea punctelor de conflict în intersecţii
Conflictele din colţurile intersecţiei pot fi generate de lipsa distanţei necesare pentru
împletirea fluxurilor şi schimbarea vitezei de deplasare. Distanţele de evacuare adecvate ar
putea oferi conducătorilor auto timpi de percepţie-reacţie potriviţi pentru evitarea conflictelor
în aval.
102

Figura 6.1. Figura 6.2.
Figura 6.1 prezintă un exemplu de punct de conflict ce poate apărea atunci când în
imediata apropiere a unei intersecţii semaforizate sau nesemaforizate există o arteră
secundară. În cazul în care două vehicule se angajează în virajul la stânga, conducătorul
vehiculului urmăritor va fi surprins de încetinirea şi virarea la dreapta a vehiculului urmărit.
Dacă artera secundară nu este amplasată suficient de departe de intersecţie, în cazul în
care vehiculul care virează la dreapta de pe o stradă şi nu se aşteaptă ca vehiculul care virează
la stânga din intrarea opusă şi încetineşte pentru a intra la dreapta pe artera secundară, apare
riscul unui un punct de conflict (figura 6.2).
În cazul spaţiilor înguste, pentru accesul dintr-o arteră principală având două benzi de
circulaţie pe sens, spre o arteră secundară cu o singură bandă pe sens, punctele de conflict pot
apărea la traversarea, divergenţa şi convergenţa fluxurilor (fig. 6.3, fig. 6.4).
Figura 6.3.
Figura 6.4.
103

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
Soluţii pentru diminuarea punctelor de conflict
Tabelul 6.7: Variante de modificare a intersecţiilor în T pentru reducerea punctelor de conflict
Intersecţii cu trei intrări - Varianta iniţială
9 puncte de conflict
Variante modificate
2 puncte de conflict 5 puncte de conflict 5 puncte de conflict
Tabelul 6.8: Modificarea intersecţiilor cu 4 intrări pentru reducerea punctelor de conflict
Intersecţii cu patru intrări - Varianta iniţială
32 puncte de conflict
Variante modificate
4 puncte de conflict 7 puncte de conflict 9 puncte de conflict
104

6.2.3. Capacitatea de circulaţie
Caracteristicile de operare ale intersecţiilor pot fi estimate şi evaluate cu ajutorul analizei
capacităţii de circulaţie şi a performanţelor. Pentru funcţionarea satisfăcătoare, o intersecţie
trebuie să răspundă cererii de trafic la orele de vârf.
Tabelul 6.9: Factori care afectează capacitatea de circulaţie şi modul de operare
Categoria Capacitatea/Elemente de proiectare
Aliniamentul (profilul) orizontal • Curbura drumului • Supraînălţarea drumului
Profilul vertical
• Înclinarea drumului (declivităţi) • Lungimea declivităţii • Curbe verticale
o Concave o Convexe
Profilul transversal
• Numărul de benzi • Lăţimea benzilor • Platforma drumului
o Tipul şi lăţimea acostamentului o Tipul şi lăţimea elementelor de separare
Altele • Frecvenţa pasajelor • Rampe şi joncţiuni • Secţiuni de împletire a fluxurilor
Analiza capacităţii de circulaţie, Q se bazează pe caracteristicile operaţionale ale
vehiculelor ce efectuează mişcări, posibil conflictuale, separate în timp de către dispozitivele
de control al traficului.
Un rol important în analiza capacităţii de circulaţie îl are determinarea fluxului de
saturaţie.
Fluxul de saturaţie descrie modul în care conducătorii auto eliberează intersecţia, el fiind
esenţial în stabilirea nivelului de serviciu şi reprezintă numărul maxim de vehicule care pot fi
servite într-o oră, prin afişarea continuă a semnalului de verde şi o curgere continuă a
vehiculelor. Se exprimă în vehicule etalon/oră de timp de verde.
Pentru analiza capacităţii de circulaţie în intersecţie, se poate adopta pentru început un
flux de saturaţie So, considerat în mod frecvent, de 1800 Vt/h pentru o singură bandă de
circulaţie, luând în calcul un interval temporal între vehicule de 2 secunde.
Aceasta este valoarea ideală căci, pentru stabilirea valorii reale trebuie luate în considerare
şi caracteristicile drumului, şi condiţiile de mediu, astfel:
876543210 CCCCCCCCNSS ⋅⋅⋅⋅⋅⋅⋅⋅⋅= , (6.1)
105

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
unde, coeficienţii au următoarea semnificaţie:
N - numărul benzilor de circulaţie;
C1 - coeficient ce ţine cont de lăţimea benzii de circulaţie; lăţimea cea mai confortabilă
(normală) corespunde valorii 1,00 a coeficientului, pentru care se obţine valoarea maximă a
fluxului; coeficientul C1 ia valori între 0,87 - 1,10 pentru lăţimi cuprinse între 2,5 m - 4,5 m;
C2- coeficient ce ţine cont de greutatea vehiculului; autovehiculele grele au acceleraţie
scăzută, deci au tendinţa de a reduce probabilitatea de descărcare a intersecţiei deoarece se
creează intervale de timp mari între autovehicule şi fluxul scade. Coeficientul C2 ia valori
între 1,00 - 0,87 pentru autovehiculele grele a căror pondere este între 0% şi respectiv, 30%;
C3 - coeficient ce ţine seama de înclinarea drumului; panta produce o scădere a
acceleraţiei, deci intervalele de timp dintre autovehicule cresc şi fluxul scade; în cazul
rampelor situaţia este inversă, C3 este cuprins între 0,97 -1,03 pentru declivităţi cuprinse între
+6% şi -6%.
C4 - coeficient ce ţine cont de locurile de parcare; parcările alăturate unei intersecţii au
tendinţa de a interfera cu fluxurile de trafic, deci manevrele de parcare întrerup descărcarea
normală; reducerea numărului benzilor de serviciu măresc impactul parcării; pentru o singură
bandă acest coeficient este de 1,0 - 0,7 pentru parcări cu 0 - 40 parcări/oră; coeficientul are
valori mai mici pentru intrări cu 2 sau mai multe benzi;
C5 - coeficient ce ţine cont de autobuzele blocate; transportul în comun care prezintă staţii
apropiate de intersecţii generează scăderea fluxului de saturaţie; o bandă poate fi temporar
blocată pe durata verdelui, sau viteza va scădea în apropierea mijloacelor de transport oprite,
deci valoarea fluxului va scădea; pentru intrări cu o singura bandă acest coeficient ia valori
între 1,00 - 0,83 pentru un număr de 0 - 40 autobuze/h, fiind mai mic pentru mai multe benzi
de circulaţie;
C6 - coeficient ce ţine cont de tipul intersecţiei; se recomandă valori ale fuxului critic So =
1600 Vt/h pentru oraşe mici, So = 2000 Vt/h pentru intersecţii foarte mari dar având o
proiectare foarte bună;
C7, C8 - coeficienţi ce ţin cont de mişcarea de virare (la stânga şi la dreapta); virarea are
adesea conflicte cu traficul de traversare şi/sau pietonii, ca rezultat fluxul de saturaţie trebuie
să fie mai scăzut decât în cazul mişcării înainte; tipul de mişcare - la dreapta sau la stânga -
procesul de servire - protejare, permisiunile sau combinaţiile celor două - volumele de trafic
opus şi numărul pietonilor trebuie introduse ca elemente de intrare pentru estimarea acestor
coeficienţi; valorile lor sunt cuprinse între 0,95 - 0,25; analiza virărilor are foarte mult în
comun cu mişcările din intersecţii.
106

O imagine completă asupra influenţei acestor factori poate fi realizată pe baza rezultatelor
cercetărilor prezentate în documentul Highway Capacity Manual 2000.
Ajustarea volumelor de trafic şi ca urmare, traficul de saturaţie, se face corespunzător
fiecărui grup de benzi, astfel:
CT
SQ ivii = , (6.2)
unde: Qi - capacitatea unui grup de benzi i, Vt/bandă;
Si - fluxul de saturaţie calculat pentru grupul i;
Tvi - timpul de verde alocat fazei i;
C - lungimea ciclului, s.
Gradul de saturaţie este estimat astfel:
i
ii Q
VX = , (6.3)
unde: Xi - gradul de saturaţie al grupului de benzi i;
Vi - volumul orei de vârf pentru grupul i;
Pentru a stabilirii gradul de saturaţie pentru întreaga intersecţie, trebuie identificate
mişcările critice pentru fiecare fază. Dacă într-o fază este servit mai mult decât un grup de
fluxuri, este considerat critic, grupul de benzi cu cea mai mare raţie a fluxului (V/S)i. Procesul
alegerii mişcării critice este identic cu cel pentru calculul duratei ciclului. Gradul de saturaţie
critic, Xc, pentru întreaga intersecţie este estimat cu relaţia:
∑ −⎟⎠⎞
⎜⎝⎛=
LCC
SVX
crtc , (6.4)
unde, L este timpul total pierdut pe durata unui ciclu, egal cu suma timpilor galben şi roşu
peste tot.
Coeficientul Xc este folosit în particular în intersecţiile cu benzi suprasaturate. De
exemplu, un grup de benzi poate avea coeficientul Xi = 1,04, ceea ce presupune o capacitate
excedentară de 4%.
Dacă Xc < 1,00, rezultă că benzile nu sunt folosite pentru întreaga lor capacitate. Astfel că,
Xc, furnizează informaţii asupra gradului de utilizare a intersecţiei, înainte de a fi luate măsuri
extreme, ca de exemplu, reproiectarea intersecţiei, cu străzi mai largi, redirecţionarea
curenţilor de trafic şi altele.
Ultimul pas în analiza capacităţii de circulaţie este evaluarea performanţelor, bazată pe
întârzierea medie a tuturor vehiculelor utilizând aceste facilităţi. Întârzierea totală a unei
călătorii are două componente, una pe parcurs, iar cealaltă la linia de stop.
107

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
Întârzierea pe parcurs pentru un vehicul individual este diferenţa între momentul când a
sosit şi momentul când ar fi trebuit să sosească deplasându-se continuu. Întârzierea la stop
pentru un vehicul singular este timpul pierdut stând, posibil la coadă, într-o intersecţie
semaforizată. O valoare obişnuită se consideră cea de 5 min/h/vehicul.
Şi în acest caz sunt estimate două componente pentru fiecare grup de benzi: d1 -
întârzierea uniformă şi d2 - întârzierea excedentară.
Prima componentă prezintă o sosire uniformă, în timp ce a doua, o sosire aleatoare. Ele
pot fi descrise de relaţiile prezentate în continuare.
Întârzierea totală pentru fiecare grup de benzi de circulaţie se determină cu relaţia:
XCT
1
CT1
C38,0dv
v
1
−
⎟⎠⎞
⎜⎝⎛ −
⋅= (6.5)
( )⎭⎬⎫
⎩⎨⎧
+−+−⋅=cX161X1XX173d 22
2 (6.6)
Întârzierea totală pentru fiecare grup de linii se determină cu relaţia:
( i2i1p ddfd += ) (6.7)
unde:
d = întârzierea totală;
fp= factorul de progresie pentru grupul de benzi i.
Factorul de progresie ia în considerare sosirea vehiculelor în raport cu indicaţia
semaforului. Dacă cele mai multe sosiri au loc în timp ce este afişat semnalul roşu pentru
grupul de benzi analizat (o fază), progresia se numeşte progresie săracă, iar întârzierile tind
să fie mai mari decât media (fp> 1,0).
Sosirile aleatoare au loc pentru fp = 1,0, condiţiile mediei.
Când majoritatea sosirilor au loc în timp ce este afişat semnalul de verde, progresia este
bună, întârzierile tind să fie mai mici decât media (fp < 1,0).
Performanţele inegale de-a lungul intrărilor, date de diferitele faze, indică faptul că timpul
de verde nu este alocat corect. Analizarea performanţelor reţelelor de străzi semaforizate este
o problemă foarte importantă căreia ingineria de trafic trebuie să îi acorde atenţia cuvenită.
108

6.2.4. Nivelul de serviciu
Nivelul de serviciu pentru intersecţiile semaforizate este caracterizat de întârzierile care
pot conduce la starea de disconfort şi frustrarea şoferului, consumul de carburant şi timp
pierdut.
Întârzierea este o mărime ce depinde de o serie de factori ca:
• tipul de control,
• elementele geometrice,
• fluxurile de trafic şi
• incidentele care apar.
Întârzierea totală reprezintă diferenţa timpul realizat efectiv şi timpul care ar fi putut fi
realizat în condiţii ideale, în absenţa controlului traficului şi dacă nu s-ar afla vehicule pe
şosea. Dar, în cazul intersecţiilor semaforizate, întârziere este cauzată în special de prezenţa
echipamentelor de control al traficului, motiv pentru care este numită întârzierea de control.
Întârzierea de control include întârzierile cumulate pentru diferitele etape ale mişcării unui
automobil, de la decelerarea iniţială, timpul de mişcare în coloană, întârzierea de la oprire şi
întârzierea de la accelerare.
În versiunile vechi ale Highway Capacity Manual (ediţia 1994 şi cele anterioare),
întârzierea cuprindea doar întârzierea de la oprire. In acest capitol, întârzierea de control se
referă şi la întârzierea de semnal.
Criteriul nivelului de serviciu pentru semnalele de trafic se referă la întârzierea de control
pentru fiecare vehicul, rezultată din analize periodice de 15 minute. Acest criteriu este dat de
tabelul 6.10. Întârzierea poate fi măsurată pe teren, sau estimată folosind ecuaţii matematice.
Întârzierea este o mărime complexă şi depinde de un număr de variabile, incluzând
calitatea progresiei, lungimea ciclului de semaforizare, raportul timpului de verde şi raportul
Volum/Capacitate (V/Q), pentru grupul de benzi aflat în discuţie.
Tabelul 6.10: Caracteristici ale performanţelor intersecţiilor funcţie de nivelul de serviciu
Nivelul de serviciu
Întârzierea, sec
Progresia Durata ciclului
Număr vehicule care opresc
Raportul V/Q
A ≤ 10 Foarte bună Redusă Foarte redus Mic
B > 10 si ≤ 20 Bună Redusă Mic Moderat
C > 20 si ≤35 Bună Mare Crescut Crescut
D > 35 si ≤55 Nefavorabilă Mare Mare Mare
E > 55 si ≤80 Săracă Mare Mare Mari
F > 80 Săracă La limita Mare ≈1
109

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
Pentru exemplificare, nivelurile de serviciu sunt descrise sumar:
Nivelul A: caracterizează fluxul liber, cu utilizatori individuali, virtual neafectaţi de
prezenţa altor vehicule din trafic.
Nivelul B: caracterizează fluxurile stabile cu un grad înalt de libertate în a alege viteza şi
condiţiile de operare care influenţează puţin pe ceilalţi participanţi la trafic.
Nivelul C: caracterizează fluxurile cu restricţii care rămân stabile, dar care interacţionează
cu alţi participanţi din fluxul de trafic. Nivelul general de confort şi siguranţă scad
considerabil.
Nivelul D: caracterizează fluxul de densitate mare în care viteza şi manevrabilitatea sunt
restricţionate sever, iar confortul şi siguranţa au un nivel scăzut chiar dacă fluxul rămâne
stabil.
Nivelul E: caracterizează fluxul instabil la, sau lângă, limita capacităţii, cu cel mai scăzut
nivel al confortului şi siguranţei. Nivelul serviciului este (LOS E) descrie operaţiile cu
întârzieri de control mai mari de 55 până la 80 de secunde pentru un vehicul. Acest nivel este
considerat ca fiind limita de întârziere permisă. Valorile mari de întârziere, în general indică
progresii sărace, lungimi mari ale ciclului şi valori mari ale raportului V/Q.
Nivelul F: corespunde traficului condiţionat în care numărul vehiculelor, care sosesc într-
un punct, depăşeşte posibilităţile de servire şi deci, se creează condiţiile formării cozilor
(ambuteiajelor), există un nivel scăzut al confortului şi creşte riscul de accidente. Nivelul
serviciului F (LOS F) descrie operaţiile cu întârzieri de control excesive, de peste 80 secunde
pentru un vehicul. Acest nivel este considerat ca fiind inacceptabil de cei mai mulţi dintre
şoferi, datorat adesea suprasaturaţiei traficului, care apare datorită excesului capacităţii de
circulaţie a unei intersecţii. Aceste întârzieri apar şi în cazul unui raport V/Q mare, apropiat de
valoarea 1,0. Progresia săracă şi lungimea mare a ciclului de semaforizare pot contribui în
mare măsură la valoarea acestor întârzieri.
Creşterea numărului de vehicule, care pot fi servite în condiţiile traficului condiţionat al
nivelului F, este în general acceptat ca fiind mai mic decât în cazul nivelului E; în consecinţă,
rata fluxului E este valoarea care corespunde fluxului maxim sau capacităţii de circulaţie.
Nivelul general de serviciu se bazează pe concepte şi termeni uşor de înţeles, dar dificil de
exprimat valoric. Realizarea unui grad de comparare între categoriile de trafic şi metodele
standard de măsurare a impus ca termen specific ingineriei de trafic, densitatea traficului, ca
indice primar de evaluare a nivelului serviciului pentru fiecare categorie de trafic.
110

Densitatea, exprimată, aşa cum se cunoaşte, în vehicule etalon/km/bandă, reflectă
posibilitatea ca anumiţi utilizatori să interfereze cu libertatea de conducere a altora. Ea
reprezintă, de asemenea, cel mai înalt grad de atenţie acordat cerinţelor conducătorilor.
Figura 6.5. Evidenţierea nivelului serviciului în diagrama fundamentală a traficului rutier.
Pentru o proiectare eficientă se recomandă nivelurile D, C şi E chiar dacă ele asigură
pentru utilizatori un nivel mai scăzut al serviciului.
Figura 6.6. Nivelul serviciului în funcţie de relaţia dintre V/C.
Dacă rata fluxului creşte, densitatea creşte, dar viteza fluxului descreşte şi cu aceasta
stabilitatea în trafic (apar undele de şoc). Acest fapt poate fi urmărit în figura 6.5. Din figura
6.6 se poate deduce uşor nivelul serviciului, dacă se cunosc viteza de operare şi raportul dintre
volum şi capacitate. Cu cât volumul de trafic se apropie de limita capacităţii (V/Q = 1) nivelul
serviciului scade. Traficul liber corespunde unei viteze mari de operare şi unui raport V/Q
mic.
111

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
6.2.5. Alegerea tipului de intersecţii
Se realizează în funcţie de încadrarea în teritoriu (contextul proiectării), intersecţiile
putând varia în funcţie de scop, profil, grad de canalizare şi măsuri de control al traficului. Cei
mai importanţi factori ce pot fi luaţi în considerare pentru alegerea unui anumit tip de
intersecţie sunt:
• Costurile de construcţie;
• Tipul zonei;
• Gradul de utilizare a terenului şi terenul disponibil;
• Clasa funcţională a drumurilor care se intersectează;
• Vitezele de acces;
• Ponderea traficului pe fiecare bandă de circulaţie;
• Volumele de trafic ce urmează a fi deservite de amenajarea intersecţiei.
Dacă alături de aceşti factori sunt luate în considerare cerinţele pentru alegerea
dispozitivelor de control al traficului, se poate determina soluţia optimă pentru tipul de
intersecţie. În acest caz, costurile şi capacitatea de circulaţie sunt factori critici.
Studiile demonstrează că, în mod normal, trebuie alese intersecţiile care furnizează nivelul
de serviciu cerut la cele mai mici costuri.
În tabelul 6.11 sunt prezentate volumele de trafic suportate de arterele având câte două
benzi de circulaţie, ce compun o intersecţie.
Tabelul 6.11: Volumele maxime de trafic
Tip drum Volumul de proiectare Arteră principală 500 1000 1500 Arteră secundară 500 250 100
Nu trebuie uitat faptul că de alegerea tipului intersecţiei depinde siguranţa circulaţiei în
zonă. Pe plan mondial, s-a demonstrat că ponderea cea mai mare o accidentelor este în
intersecţii, în mediul urban producându-se mai mult de 50% dintre accidente, în timp ce în
mediul rural aproximativ 30%. Numărul accidentelor este proporţional cu volumul şi
distribuţia traficului pe cele două artere, principală şi secundară ce compun o intersecţie.
Intersecţiile în sens giratoriu prezintă o siguranţă considerabil mai mare în raport cu toate
celelalte tipuri de intersecţii, la nivel sau denivelate.
De asemenea, o vizibilitate scăzută poate genera un număr mare de accidente. Ca soluţie,
canalizarea fluxurilor poate fi, în general benefică, dar prezenţa insulelor cu borduri poate fi
periculoasă. Pericolul într-o intersecţie poate creşte, de asemenea, dacă vitezele de acces în
intersecţie cresc.
112

6.2.6. Caracteristicile intersecţiilor semaforizate
Valoarea ideală a fluxului care ar putea să treacă printr-o intersecţie este cunoscută ca rata
fluxului de saturaţie per oră de timp de verde. Valoarea timpului de percepţie-reacţie iniţial,
acceleraţia vehiculului şi comportamentul vehiculelor care se urmăresc reprezintă factorii care
influenţează valoarea fluxului de saturaţie.
Pentru o bună înţelegere este nevoie să fie explicate câteva noţiuni de bază privind
proiectarea intersecţiilor semaforizate. În cadrul instalaţiilor de semaforizare, semnalele de
trafic alocă timpii după o succesiune bine determinată – fazele de semaforizare – în
interiorul ciclului de semaforizare, într-o varietate de moduri, de la modul presetat sau
prestabilit cu două sau mai multe faze, la cel semiactualizat şi cel actualizat. Modul de operare
cu ajutorul semnalelor de trafic poate fi descris cu ajutorul următorilor termeni:
Ciclu de semaforizare, C – orice secvenţă completă a indicaţiei semnalului sau intervalul
de timp de la începutul unui timp de verde pentru o fază până la începutul timpului de verde
pe faza următoare;
Faza de semaforizare – o parte a ciclului alocată unei mişcări sau unei combinaţii a
mişcărilor de trafic permise simultan, pentru care nu se produc puncte de conflict esenţiale
(conflicte între vehicule şi vehicule) sau dacă se produc acestea sunt neesenţiale (conflicte
între vehicule şi pietoni);
Timpul intermediar sau inter-verde, Ti – destinat evacuării intersecţiei şi reprezintă
intervalul de timp de la sfârşitul semnalului de verde pe o fază şi începutul semnalului de
verde pe faza următoare, exprimate în secunde;
Timpul de verde, Tv – intervalul de timp dintr-o fază de semaforizare, în care este afişată
indicaţia verde şi indică permisiunea de trecere prin intersecţie;
Timpul pierdut, Tp – timpul în care intersecţia nu este folosită efectiv, care apare la
afişarea semnalului de galben/roşu simultan (când intersecţia este eliberată) şi la începutul
fiecărei faze când primele câteva vehicule întârzie la plecare;
Timpul de verde efectiv, Tvef – timpul disponibil efectiv unei mişcări, este determinat, în
general, ca suma dintre timpul de verde şi timpul de galben din care se scade timpul pierdut
pentru mişcarea desemnată;
Timpul de roşu efectiv, Tref – timpul în care o mişcare sau o combinaţie de mişcări au interdicţia de a se deplasa prin intersecţie şi reprezintă diferenţa dintre lungimea ciclului de semaforizare, C, şi timpul de verde efectiv;
Raportul de verde efectiv Tvefi/C – raportul dintre timpul de verde efectiv şi lungimea ciclului.
113

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
6.2.7. Caracteristicile intersecţiilor nesemaforizate
Capacitatea arterei principale din intersecţiile controlate cu STOP şi CEDEAZĂ
TRECEREA nu este afectată de existenţa intersecţiei. În schimb, capacitatea arterei secundare
este dependentă de distribuţia intervalelor de timp suficient de mari dintre vehiculele fluxului
principal şi de intervalul admisibil pentru traficul secundar.
Acesta din urmă depinde de timpul de reacţie/răspuns al conducătorului auto, accelerarea
şi lungimea vehiculului, dar nu depinde de viteza de apropiere a vehiculului de drumul
principal. Printre factorii care influenţează capacitatea de circulaţie a unei intersecţii
nesemaforizate pot fi amintiţi:
• Viteza de operare pe drumul principal;
• Distanţa de vizibilitate în intersecţie;
• Raza de virare în intersecţie;
• Amplasamentul intersecţiei şi numărul de benzi de circulaţie;
• Tipul zonei;
• Ponderea vehiculelor grele.
Factorii critici sunt reprezentaţi de distanţa de vizibilitate în intersecţie şi de numărul şi
distribuţia benzilor de circulaţie. Metodologia de proiectare a intersecţiilor nesemaforizate
este prezentată detaliat în lucrarea [90].
6.2.8. Canalizarea fluxurilor rutiere
a)
b)
c)
Figura 6.7: Insule de separare
114

Scopul canalizării fluxurilor de trafic este îndreptat spre obţinerea unei operări mai sigure
şi eficiente a intersecţiei.
Printre obiectivele unei proiectări adecvate a unei intersecţii pot fi enumerate:
• Reducerea numărului punctelor de potenţial conflict la numărul minim ce corespunde
unei funcţionări eficiente;
• Reducerea complexităţii zonelor de conflict;
• Limitarea frecvenţei conflictelor actuale;
• Limitarea severităţii conflictelor potenţiale.
Pentru a se atinge aceste obiective au fost enunţate câteva principii ale canalizării:
• Mişcările nedorite sau greşite ar trebui descurajate sau interzise;
• Traiectoria vehiculelor ar trebui să fie definite în mod clar;
• Existenţa recomandărilor privind circulaţia cu viteze considerate sigure;
• Punctele de conflict să fie separate cu ajutorul canalizărilor, oriunde este posibil;
• Fluxurile de trafic să fie de traversare, pentru intersecţiile în unghi ascuţit până la
unghi drept şi de convergenţă în cazul unghiurilor obtuze ;
• Fluxurile principale să aibă un grad de libertate sporit;
• Proiectarea să fie în acord cu schemele de control al traficului;
• Vehiculele care frânează, cele care se deplasează cu viteză scăzută sau sunt oprite,
trebuie separate de benzile pe care se circulă cu viteză mare;
• Să existe refugii pentru pietoni şi persoanele cu handicap.
Instrumentele disponibile pentru a aplica aceste principii sunt:
• Definirea numărului şi aranjarea benzilor de circulaţie;
• Insule de separare de toate formele şi mărimile;
• Insule mediane;
• Raze de virare;
• Elementele geometrice ale drumului;
• Sectoare de selecţie şi separare;
• Dispozitive de control al traficului.
115

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
7. TEGNOLOGII MODERNE DE DETECTARE
7.1. INTRODUCERE Continua creştere a volumelor de trafic în condiţiile limitării posibilităţilor de extindere a
amenajărilor reţelelor rutiere din zonele rurale, urbane sau de pe autostrăzi, impun ca necesară
maximizarea eficienţei şi capacităţii reţelelor de transport rutier.
Sistemele de străzi inteligente care conţin detectori pentru monitorizarea traficului,
sistemele de control adaptiv în timp real, mijloacele media de comunicaţie a informaţiei spre
utilizatori sunt combinate cu sisteme de control şi supraveghere a traficului rutier pe
autostradă în scopul creării unor coridoare rapide care sporesc eficacitatea reţelei de transport.
Îmbunătăţirile infrastructurii rutiere şi tehnologiile noi au fost, în schimb, integrate cu
comunicaţiile şi afişate la bordul vehiculelor inteligente şi în zonele publice (de exemplu,
autogări sau centre comerciale) pentru a forma sistemele inteligente de transport.
Detectorii pentru vehicule reprezintă parte integrantă a acestor sisteme moderne de control
al traficului. Tipurile de date de trafic, ca şi fiabilitatea, consistenţa, acurateţea şi precizia, dar
şi timpul de răspuns al detectorului, sunt câţiva dintre parametrii critici utili în evaluarea
modului de alegere a unui detector pentru vehicule. Aceste atribute devin cu atât mai
importante cu cât numărul detectorilor proliferează şi aspectele controlului, în timp real ale
sistemelor inteligente de transport, acordă o importanţă deosebită calităţii şi cantităţii datelor
privind fluxurile de trafic, precum şi uşurinţei de interpretare şi integrare a datelor în sistemele
deja existente.
7.2. EVOLUŢIA ECHIPAMENTELOR DE DETECTARE Un sistem de detectare a vehiculelor este „un sistem destinat a indica prezenţa sau
trecerea unui vehicul” (Standarde NEMA – National Electrical Manufacturers Association)
care furnizează elementele de intrare pentru controlul sistemelor ce reacţionează la valorile de
trafic, supravegherea autostrăzilor şi sistemelor de colectare a datelor de trafic.
Încă din 1920, când operarea manuală a semnalelor de trafic a fost înlocuită cu
dispozitivele de control prestabilit al traficului, inginerii au insistat asupra necesităţii unor
mijloace de colectare a datelor de trafic, obţinute până atunci doar prin observaţiile ofiţerilor
de poliţie.
Prima aplicaţie cu semnale semiactualizate pentru acordarea permisiunii de trecere prin
intermediul unui detector a fost introdusă de inginerul feroviar, Charles Adler Jr., în 1928 în
116

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
Baltimore – SUA şi a constat dintr-un microfon montat pe un stâlp într-o intersecţie de
drumuri.
Aproape în aceeaşi perioadă, Henry A. Haugh, inginer în domeniul electric, a dezvoltat un
detector, montat în drum, sensibil la presiune, folosind două discuri metalice acţionând ca şi
contacte electrice la trecerea unui vehicul. Acest detector a avut o utilizare peste 30 de ani,
pentru detectarea vehiculelor în controlul actualizat al semnalelor de trafic.
Concomitent, H. Adler şi-a perfecţionat detectorii acustici introducând un nou tip de
detector cu boxe metalice montat în intrările intersecţiei. Aceste boxe „culegeau” sunetele
produse la trecerea roţilor unui autovehicul şi le transmiteau unor microfoane.
Problemele mecanice ale detectorilor pneumatici cu discuri au condus cercetările spre
detectorul electro-pneumatic. Deşi acest dispozitiv şi-a găsit câteva aplicaţii, instalarea era
costisitoare şi, în plus, era capabil să detecteze doar trecerea (mişcarea), în timp ce acurateţea
numărării punţilor era limitată de generarea presiunii undelor de aer şi vibraţia contactelor
capsulei. Dezavantajele acestor detectori au condus la dezvoltarea unor dispozitive bazate pe
alte principii ca:
• sunet (detectori acustici);
• opacitate (detectori optici);
• geomagnetism (detectori magnetici şi magnetometre);
• reflexia radiaţiei (detectare în infraroşu, cu ultrasunete, cu microunde şi radar);
• Inducţie electromagnetică (detectori cu buclă inductivă);
• vibraţie (detectori tribo-electrici, seismici, inerţiali).
Nu toţi aceşti detectori au o utilizare pe scară largă. În aplicaţiile actuale, detectorul cu
buclă inductivă este, pe departe, cel mai utilizat în aplicaţiile telematice. Magnetometrul şi
detectorul magnetic sunt produşi şi utilizaţi pentru diferite aplicaţii, dar în acest timp câştigă
tot mai mult teren tehnologiile bazate pe imagini video, sistemele de televiziune cu circuit
închis, ca şi detectorii în infraroşu, cu microunde şi detectorii radar.
Controlul traficului rutier se referă atât la mişcarea vehiculelor cât şi a pietonilor.
Deoarece volumele corespunzătoare acestor mişcări sunt dependente de diferitele perioade ale
zilei este de dorit să se poată detecta mişcările de acces prin plasarea unuia sau mai multor
dispozitive în calea vehiculelor care se apropie de o intersecţie sau de o locaţie convenabilă
pentru pietoni.
117

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
7.3. CLASIFICAREA TEHNOLOGIILOR DE DETECTARE Pentru a implementa sistemele avansate de management al traficului rutier au fost
dezvoltate noi capabilităţi privind funcţiile de monitorizare şi management. Acestea includ
tehnologiile avansate de detectare, prezentate în sinteză în schema bloc din figura 7.1.
Figura 7.1. Clasificarea tehnologiilor de detectare.
Sistemele actuale de detectare se bazează în principal pe detectorii cu buclă inductivă
instalaţi în îmbrăcămintea rutieră. În prezent au fost dezvoltate tehnologii de detectare
alternative pentru a permite măsurarea unor parametrii ai traficului, cum ar fi densitatea
traficului (vehicule/km/bandă de circulaţie), durata călătoriei şi numărul vehiculelor
(volumele) care efectuează un viraj stânga sau dreapta. Aceşti detectori avansaţi oferă date
mult mai precise pentru parametrii care nu puteau fi măsuraţi direct cu instrumentele
anterioare, supraveghează traficul pe arii extinse şi controlează intersecţiile şi autostrăzile
pentru o mai bună informare a conducătorilor auto. În plus, majoritatea dintre detectorii
moderni nu necesită întreruperea fluxurilor de trafic pentru instalare şi întreţinere.
7.4. TIPURI DE DETECŢIE Figura 7.2 prezintă clasificarea controlerelor de detectare actualizată a traficului rutier.
Anumite tipuri de detectori înregistrează, în principal vehiculele aflate în mişcare sau
vehiculele oprite, iar altele necesită ca vehiculele să se deplaseze cu minim 3 - 5 km/h.
1. Detectorii magnetici sau buclă normală pot opera în modul puls sau modul prezenţă.
Bucla produce o pulsaţie scurtă de ieşire, atunci când se produce detectarea unei
treceri, dar nu mai mult decât perioada staţionării vehiculului în zona de detectare,
întrucât întârzierea vehiculului va produce un semnal cu atât mai lung cu cât
staţionarea în zona de detecţie este mai prelungită.
118

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
2. Un detector cu apel extins are un semnal de ieşire extins, însemnând reţinerea sau
extinderea apelului generat de un vehicul pentru o perioadă de timp care a fost fixată
anterior cu un temporizator încorporat în detector.
Un detector cu apel întârziat nu realizează un semnal de ieşire când zona de detecţie este
ocupată pentru o perioadă de timp, fixată pe un temporizator încorporat în unitatea de
detectare. La ora actuală se folosesc frecvent detectori hibrid atât pentru extinderea cât şi
întârzierea semnalului.
Figura 7.2. Tipuri de detecţie.
Pot fi amintiţi şi detectorii care extind posibilităţile detectorilor sau controlerelor obişnuiţi
fiind dotaţi cu configuraţii hardware ce conţin temporizatoare şi afişează circuite de
monitorizare. Programele după care funcţionează permit activarea şi dezactivarea unor
detectori, controlează cedarea timpului de verde ca şi activarea reţinerii semnalului pe o
anumită fază pentru suplimentarea programului controlerului.
Un exemplu este “sistemul de extindere a timpului de verde” în scopul protejării
vehiculelor aflate în zona de dilemă într-o intersecţie cu program de semaforizare semi-
actualizat.
Un alt tip de detectare cu logică auxiliară este “sistemul de analiză a vitezelor”. Acest
sistem este o componentă hardware compusă din detectoare cu două bucle şi logică auxiliară.
Cele două bucle sunt instalate pe aceeaşi bandă de circulaţie la o distanţă precisă. Un vehicul
care trece peste bucle produce două comenzi. Pentru a stabili dacă viteza vehiculului este
superioară sau inferioară unei viteze de referinţă se măsoară intervalul de timp dintre prima şi
a doua acţionare.
119

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
Sistemele de detectare bazate pe cele trei tipuri de detectori, buclă inductivă,
magnetometre şi detectori magnetici se compun din senzori montaţi în drum, cabluri de
legătură şi o unitate electronică montată în carcasa controlerului, figura 7.3.
Figura 7.3. Schema generală a sistemului de detectare a vehiculelor.
Cel mai utilizat sistem este sistemul cu buclă inductivă prezentat în figura 7.4, fiind
compus din detectorul oscilator, cablu de legătură şi o buclă îngropată în asfalt, constând din
una sau mai multe înfăşurări ale cablului.
Figura 7.4. Sistem de detectare cu buclă inductivă (cotele sunt exprimate în metri).
Detectorul oscilator – amplificator transmite energia proprie şi operează pe principiul
modificării câmpului electromagnetic al buclei la trecerea unui vehicul.
Mărimea, forma şi configuraţia buclei variază în funcţie de aplicaţia specifică, de la
mărimea cea mai comună, bucla pătrată (1,8 x 1,8 m), la buclele dreptunghiulare (1,8 x 12m
la 21 m). Datorită flexibilităţii particularităţilor sale, bucla oferă cel mai mare spectru de
detecţie a vehiculelor.
Oscilatorul serveşte ca sursă de energie pentru buclă; când un vehicul se opreşte sau trece
peste buclă, inductanţa buclei scade, cauzând o creştere a frecvenţei oscilatorului. Schimbarea
de inductanţă sau frecvenţă activează un releu sau circuit care trimite un impuls electric spre
controler cu semnificaţia că a fost detectată prezenţa unui vehicul.
120

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
Bucla este montată într-un canal tăiat în asfalt având înfăşurate una sau mai multe spire. O
altă posibilitate este montarea acestor spire în conductă de plastic cât mai aproape de
suprafaţa drumului.
Aplicaţiile detectorilor în ingineria traficului rutier prezintă forme variate, de la
intersecţiile izolate, controlul rampelor în cazul joncţiunilor, controlul şi supravegherea
traficului pe autostrăzi.
Rezultatele spectaculoase din ultimii ani se datorează utilizării micro-procesoarelor şi
electronicii de vârf.
7.5. APLICAŢII ALE TEHNOLOGIILOR DE DETECTARE
7.5.1. CONCEPTE DE CONTROL AL ARTERELOR RUTIERE URBANE În cazul arterelor rutiere urbane, aplicaţiile detectorilor sunt destinate în special
intersecţiilor semaforizate, ce pot fi grupate în următoarele categorii:
Figura 7.5. Controlul intersecţiei izolate.
• Controlul intersecţiilor izolate: fluxul de trafic este controlat fără a lua în considerare
modul de operare al intersecţiilor adiacente (fig. 7.5).
• Controlul intersecţiilor coordonate (reţea deschisă): consideraţii majore sunt acordate
mişcării progresive a fluxului de trafic de-a lungul unei artere rutiere, precum şi
121

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
operării semnalelor arteriale, ca un sistem. Figura 7.6 ilustrează atât o reţea deschisă
cât şi una închisă.
• Controlul reţelei închise: include un grup de intersecţii semaforizate într-o reţea a
cărei operare este coordonată.
Figura 7.6. Controlul unei reţele de străzi.
• Controlul pe arii extinse: tratează toate semnalele de trafic din interiorul unei zone,
unui oraş sau unei metropole, ca un sistem. Semnalele individuale dintr-o zonă pot fi
controlate pe baza conceptelor enunţate anterior.
Alte posibilităţi de control al semnalelor de trafic care se pot aplica pentru funcţii speciale
includ:
• Controlul sistemelor de vehicule cu prioritate: acordă prioritate pentru mişcarea
anumitor categorii de vehicule, cum ar fi vehicule de intervenţie (salvări, pompieri,
poliţie) şi autobuzelor.
• Controlul joncţiunilor (intersecţiilor de autostrăzi): îmbunătăţeşte eficienţa
joncţiunilor.
Fiecare dintre conceptele prezentate este caracterizat de cerinţe operaţionale, obiective de
performanţă şi cerinţe funcţionale, precum şi componentele hardware şi software
corespunzătoare.
În cazul controlului autostrăzilor abordarea este specială datorită considerării accesului
limitat, amenajările fluxurilor libere necesitând control limitat. Dar, creşterea rapidă din
ultimele decenii a congestiei traficului a impus apariţia Sistemelor de supraveghere şi de
control (Freeway Surveillance and Control Systems). Aceste sisteme sunt proiectate în special
pentru controlul rampelor, controlul benzilor şi a coridorului. Aceste concepte având în
considerare decongestionarea traficului includ:
• intrări cu restricţie: închiderea acceselor (rampelor), contorizarea rampelor;
• tratament de prioritate: operarea vehiculelor cu grad mare de ocupare;
• supraveghere;
122

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
• managementul incidentelor: detectare şi răspuns;
• informare consultativă: viteză, durata călătoriei, ghidarea rutei.
Pentru fiecare dintre concepte au fost dezvoltaţi anumiţi parametri şi anumite principii de
control cărora le corespund componente funcţionale specifice. Un rol important în fiecare tip
de control îl au detectorii.
7.5.2. DESCRIEREA FUNCŢIONALĂ A DETECTORILOR Cei mai mulţi detectori sunt folosiţi pentru a identifica mişcarea vehiculelor care trec
printr-un punct al drumului. Această informaţie este transmisă la un controler de semnale de
trafic, contor de trafic sau alte dispozitive.
Dacă un detector este echipat cu elemente ce conţin caracteristici direcţionale, el va
înregistra vehiculele de pe o anumită direcţie, dar nu şi vehiculele din direcţie opusă. Pentru
locaţiile în care vitezele vehiculelor sunt foarte scăzute sau vehiculele pot staţiona şi nu sunt
cerute caracteristici direcţionale, se foloseşte în general doar un detector de prezenţă.
Un detector de mişcare va înregistra trecerea vehiculului prin zona detectată atât timp cât
se deplasează cu viteze peste 3 – 5 km/h. Aceşti detectori sunt folosiţi în cazul controlerelor în
regim actualizat sau semiactualizat. Pentru a înregistra vehiculele cu viteze de deplasare foarte
mici, este necesar un detector de prezenţă.
Când vehiculele sunt obligate să oprească sau să ruleze cu o viteză foarte mică în
apropierea unei intersecţii cu controlul actualizat al semnalelor de trafic, este necesar să se
detecteze prezenţa pentru a avea certitudinea că vehiculele oprite (aflate în aşteptare pe
detector), vor fi înregistrate.
Detectorii de prezenţă care nu au caracteristica recunoaşterii direcţiei fluxului rutier nu pot
face diferenţa dintre vehiculele care acced şi cele care evacuează zona de detecţie. Cu toate
acestea, are puţină importanţă direcţia, căci apelul nu este în mod obişnuit reţinut de controler
o dată ce vehiculul părăseşte zona de detecţie. Apelul nu va fi reţinut nici de detectorul de
trecere atunci când vehiculul părăseşte zona de detecţie. Diferenţa constă în modul de operare
a controlerului – blocat sau neblocat.
Pentru efectuarea înregistrărilor de trafic se folosesc de obicei un detectori de trecere.
Acest tip de detector poate fi folosit pentru a număra vehiculele de pe o singură bandă,
simultan de pe benzi pe o direcţie particulară sau, simultan, de pe toate benzile în ambele
direcţii. Dacă numărul de benzi pe care se realizează înregistrările cu un singur detector
creşte, acurateţea înregistrărilor, atunci când detectorul este ocupat de mai multe vehicule în
acelaşi timp, scade.
123

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
Detectorii de trecere sunt folosiţi, de asemenea, pentru măsurarea vitezei fluxurilor rutiere
şi a volumelor de trafic. Ei pot înregistra informaţii de trafic pe benzi individuale sau pe toate
benzile corespunzătoare unei singure direcţii.
Pentru obţinerea unor date precise despre viteze şi volume de trafic, detectorii trebuie
plasaţi la o distanţă suficient de mare de intersecţia semaforizată, astfel încât şirurile formate
să nu depăşească zona de detecţie. În această situaţie este înregistrat doar volumul de trafic.
Dintre cele trei tipuri de detectori (buclă, magnetometru şi magnetic) detectorul magnetic
este cel mai limitat, el neputând lucra doar în modul PULS. Aceasta deoarece detectorul
produce un puls de ieşire de scurtă durată (100 ms) când se produce detectarea. Astfel, el
poate fi utilizat pentru detectarea mişcării într-o intrare a unei intersecţii precum şi ca
echipament de numărare.
Magnetometrele ca şi buclele inductive pot fi folosite atât pentru a detecta prezenţa cât şi
trecerea. Magnetometrele lucrează satisfăcător pentru a număra vehiculele, arătând dacă zona
de detectare este definită corespunzător. Zona de detecţie pentru magnetometre este, în
general, inferioară valorii de 1 m, ceea ce poate cauza lipsa anumitor detectări.
Detectorul tip buclă inductivă este recomandat, în special, în cazul detectării prezenţei.
Mărimea buclei permite să fie adaptat oricăror aplicaţii. Pentru zonele mici de detectare,
buclele convenţionale şi magnetometrele pot fi interschimbabile. Numai pentru detectarea
mişcării (PULS), toate cele trei tipuri de detectoare sunt interschimbabile.
Anumite scheme destinate intersecţiilor cu viteză mare folosesc bucle convenţionale sau
magnetometre cu ieşiri normale. Alte scheme folosesc unităţi de control care permit
extinderea apelului chiar după ce vehiculul a părăsit zona de detecţie (detectori cu apel
extins).
7.5.3. CONTROLUL INTERSECŢIILOR LOCALE Cerinţele funcţionale ale unui element de detectare pentru controlul intersecţiilor se
bazează în principal pe deciziile operaţionale luate în timpul procesului de proiectare.
Inginerul proiectant trebuie să determine mai întâi metoda de control cea mai potrivită, dar şi
elementele operaţionale asociate pentru a stabili cerinţele funcţionale ale componentelor
hardware şi software.
Moduri de control
Controlul prestabilit şi controlul actualizat sunt cele două moduri de bază de control
pentru semnalele de trafic.
124

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
Deoarece controlul prestabilit atribuie permisiunea de traversare a intersecţiei pe baza
unui program predeterminat, nu este nevoie de detectori. Lungimea intervalelor de timp
pentru fiecare indicaţie a semnalelor dintr-un ciclu este fixă pe baza unui model de succesiune
a fazelor.
În cazul semnalelor actualizate, lungimea fazelor de semaforizare nu este fixă, dar
permisiunea de trecere este atribuită pe baza condiţiilor actuale (cererea de vehicule) care este
furnizată de mărimile de intrare corespunzătoare elementelor de detectare.
Există mai multe tipuri de control actualizat. În cazul controlului semiactualizat, o fază -
de obicei corespunzătoare fluxului principal - operează după modul de control prestabilit. În
cazul acestui tip de operare sunt ceruţi detectori numai pe strada secundară, de traversare.
Acest tip de control este recomandat atunci când fluxul de pe artera principală este relativ
uniform şi staţionar, iar volumele de pe artera secundară au valori de vârf nepredictibile.
Controlul total actualizat este folosit în special în intersecţiile în care apar variaţii
sporadice ale valorilor de trafic. Detectorii sunt ceruţi pentru toate fazele, fiecare durată a
fazei fiind în concordanţă cu parametrii prestabiliţi ai planului de semaforizare. Controlul total
actualizat poate permite omiterea unei faze atunci când nu este cerere de trafic, distribuirea
fazelor, suprapunerea fazelor (permiţând fazelor care nu au puncte de conflict să opereze
concomitent), şi faze destinate pietonilor.
Controlul volum-densitate este o variantă a controlului actualizat şi furnizează un complex
de criterii pentru alocarea timpului de verde („adăugare iniţială” şi „timp de aşteptare –
reducerea intervalelor”). Acest tip de control poate fi utilizat atât în modul semiactualizat cât
şi total actualizat. El operează de obicei cu o variaţie continuă a lungimii ciclului şi cere o
informaţie de trafic precisă pentru a reacţiona la timp şi a răspunde cerinţelor existente. De
altfel, caracteristica „timp de aşteptare – reducerea intervalelor” din controlul volum –
densitate poate fi obţinută cu ajutorul detectorilor de prezenţă. Punctele de detectare ale
volumelor şi densităţii traficului sunt instalate la distanţe de 60 - 180 m înainte de intrarea în
intersecţie, funcţie de viteza de acces.
7.5.4. DETECTAREA PRIORITĂŢII VEHICULELOR Există anumite situaţii care cer alocarea specială a permisiunii de trecere în intersecţiile
semaforizate. Pentru aceste cazuri au fost dezvoltate anumite forme de control al priorităţii. În
acest scop este făcută o distincţie între noţiunile de preemţiune şi controlul priorităţii.
Astfel, termenul preemţiune poate fi definit ca o operaţie în care succesiunea normală a
semnalelor este întreruptă şi/sau modificată în funcţie de o situaţie specială, cum ar fi trecerea
125

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
unui tren, deschiderea unui pod, sau trecerea unui vehicul de intervenţie, de pompieri, salvare
sau poliţie.
În cazul operaţiilor cu prioritate, timpul de verde este prelungit peste normal sau se va
trece la semnalul de verde imediat ce este posibil, în scopul acordării unui tratament de
prioritate pentru vehiculele de tranzit.
În cazul preempţiunii trenurilor, detectorii sunt folosiţi pentru a detecta apropierea unui
tren şi pentru a declanşa o reacţie de control care la început evacuează calea de rulare şi apoi
permit fazelor fără puncte de conflict să continue modul de operare pe durata trecerii trenului.
Preempţiunea pentru vehiculele de urgenţă la o intersecţie izolată depinde de abilitatea de
a detecta vehiculele de urgenţă, în mod obişnuit folosind lumina modulată. O procedură
specială de control atribuie prioritatea de trecere, când este detectat un vehicul de urgenţă.
După o perioadă prestabilită, semnalul revine la modul de operare normal.
În anumite sisteme de urgenţă, indicaţia semnalului verde este afişată pentru toate
intersecţiile aflate de-a lungul unui traseu ales să fie străbătut de vehiculul de urgenţă.
Atribuirea priorităţii de-a lungul traseului este realizat prin activarea unui comutator plasat în
locaţia centrală cum ar fi o unitate de pompieri.
În anumite sisteme de semnale controlate computerizat, progresia mişcării este o trăsătură
programată care operează mult mai eficient decât tehnica manuală.
Obiectivul principal în cazul controlului priorităţii de tranzit este atribuirea priorităţii de
mişcare a persoanelor în raport cu mişcarea vehiculelor. Aceasta poate fi înţeles în mai multe
moduri ca:
• benzi speciale pentru mijloacele de transport public;
• atribuirea priorităţii de trecere la intersecţiile semaforizate prin optimizarea
programelor de semaforizare sau prin sisteme de prioritate a autobuzelor.
Există mai multe categorii de echipamente care pot fi utilizate în acest scop. Tipul cel mai
folosit are la bază detectorii optici.
7.5.4.1. Emiţătoare/receptoare de lumină Acest sistem, folosit eficient pentru controlul preemţiunii vehiculelor de intervenţie în caz
de urgenţă şi priorităţii vehiculelor destinate transportului public de călători (trafic de tranzit)
este o aplicaţie bazată pe un sistem de detectare a intensităţii luminii.
Este folosită o lumină foarte intensă emisă la o frecvenţă specifică de către un transmiţător
montat pe un autovehicul (lumină albă intermitentă pentru vehiculele de urgenţă, lumină albă
cu un filtru infraroşu pentru vehiculele de tranzit).
126

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
Lumina este programată să lumineze un cod de frecvenţe înalte pentru a-l distinge de alte
semnale luminoase intermitente sau descărcări electrice luminoase. Sunt utilizate coduri
specifice diferitelor tipuri de vehicule pentru a realiza diferenţierea între vehiculele de urgenţă
care comandă preemţiunea şi vehiculele de tranzit care pot obţine doar o prioritate de la
controlerul de semnal (automat de dirijare a circulaţiei). Fiecare intersecţie care va avea
dreptul de preemţiune este echipată cu unul sau mai mulţi detectori optici funcţie de numărul
acceselor intersecţiei având această funcţie.
Figura 7.7. Transmiterea semnalului vehiculului de intervenţie spre unitatea de detectare. Dacă vehiculul de urgenţă având activat emiţătorul luminos se apropie de o intersecţie,
receptorul de direcţie corespunzător sesizează lumina codificată declanşând preemţiunea în
circuitele controlerului din intersecţie. Când este detectată lumina intermitentă, se transmite
un semnal către un selector de fază conectat la controler sau direct către acesta. Astfel, este
examinată starea automatului de dirijare a circulaţiei, figura 7.7.Există posibilitatea ca acesta
să reţină semnalul de verde pentru vehiculul de urgenţă (dacă acesta este afişat deja) sau
grăbeşte terminarea semnalului deja afişat pentru a-l schimba, imediat ce este posibil, cu
semnal de verde pe direcţia de deplasare a vehiculului de urgenţă.
Modul de operare pentru vehiculele cu prioritate este în mare măsură acelaşi cu cel
prezentat anterior, exceptând faptul că funcţia de control nu este de preemţiune. Dacă
semnalul este verde controlerul încearcă să reţină semnalul de verde un interval de timp
127

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
suficient de lung pentru ca vehiculul cu prioritate să evacueze intersecţia (în special când
acesta se află în întârziere).
Dacă semnalul nu este verde, controlerul încearcă să atribuie acest semnal cât mai repede.
Acest sistem permite ca în cazul a două priorităţi, ca de exemplu vehicule de urgenţă şi de
tranzit, să fie folosit acelaşi echipament. Vehiculele de tranzit sunt echipate cu un emiţător de
lumină cu filtru în infraroşu şi cu diferite secvenţe de codificare a luminii. Echipamentele
electronice din intersecţie diferenţiază cele două coduri şi aplică secvenţa de preemţiune sau
prioritate adecvată.
Figura 7.8. Semnături specifice diferitelor categorii de vehicule.
7.5.4.2. Conceptul identificării vehiculului
Acest concept, introdus în 1989, utilizează un transmiţător localizat în vehiculele de
urgenţă, tranzit sau comerciale, o buclă deja existentă sau nouă şi o unitate de detectare
standard cu un modul discriminator (demodulator de frecvenţă) adiţional. Sistemul recunoaşte
vehiculul de urgenţă şi oferă un semnal de ieşire separat în timp, ce operează asemeni unui
detector de vehicule obişnuit. În plus, pentru controlul preemţiunii şi priorităţii, sistemul
posedă alte aplicaţii cum ar fi, porţi de control al priorităţii, recunoaşterea vehiculelor la
poziţiile de control şi staţiile de benzină, raportarea trecerii autobuzelor cu grafic de circulaţie.
Transmiţătorul de pe vehicul este montat pe partea inferioară a vehiculului, fiind proiectat
să transmită continuu un cod unic de identificare a vehiculului. Acest cod este primit de o
128

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
buclă standard încorporată în drum. O unitate de detectare specială detectează vehiculul şi
interpretează codul de identificare.
7.5.4.3. Semnătura vehiculelor de tranzit Pentru a elimina necesitatea echipării vehiculelor cu prioritate cu transmiţătoare speciale,
cercetările recente au fost îndreptate spre dezvoltarea unui sistem pasiv. Majoritatea
sistemelor aflate în prezent pe piaţă constau într-o buclă încorporată în drum şi o unitate de
detectare digitală adaptată care furnizează o undă unică (altfel numită „semnătură” sau
„amprentă”) a fiecărui vehicul pe care îl detectează (fig. 7.8).
Pentru sistemele de detectare a autobuzelor, semnalul digital este introdus într-un modul
microprocesor care analizează amprenta şi caracteristicile „semnăturii” create de vehiculul
luat în considerare. Semnătura este atunci comparată cu profilul autobuzului stocat în
memoria microprocesorului. Dacă este identificat un autobuz, se generează un semnal de
ieşire, pentru a oferi tratamentul de prioritate. Diagrama bloc a acestui sistem este prezentată
în figura 7.9.
Similare, ca mod de operare, sistemelor de emisie optice descrise anterior, aceste tehnici
folosesc transmiţătoare radio montate în fiecare vehicul de urgenţă sau de tranzit, precum şi
un radio receptor în fiecare intersecţie implicată în sistem. Întrucât undele radio nu sunt
direcţionale, sistemul poate să includă o comandă de la vehiculul care se apropie sau poate să
furnizeze preemţiune limitată sau comenzi de prioritate (o preemţiune de intrare, roşu peste
tot clipitor, etc) şi o limitarea zonei de detectare pentru a evita preemţiunea pentru semnalele
adiacente inutile.
Figura 7.9. Sistem de detectare a autobuzelor.
Un sistem utilizat în mod curent include, pentru a determina traiectoria vehiculului,
echipamente speciale la bordul vehiculului. Informaţia este apoi codificată în transmisia radio
129

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
către semnalul de care se apropie. Prin codificarea separată a vehiculelor de urgenţă şi a celor
de tranzit, poate fi implementat un sistem dual preemţiune/prioritate.
7.5.5. CONTROLUL SISTEMULUI DE SEMNALE Detectorii sunt folosiţi ca sisteme de senzori care să achiziţioneze datele necesare unui
număr de funcţii ale sistemului. În acest sens detectorii constituie un subsistem de
supraveghere necesar pentru a furniza informaţiile cu privire la fluxurile de trafic utilizate în
calculul elementelor programului de semaforizare pentru funcţiile specifice ale sistemului
(controlul intersecţiei critice, selectarea planurilor de semaforizare), dar şi pentru calculul
direct sau indirect al planurilor de semaforizare utilizând metode diferite de control al
intersecţiei. Trebuie realizată o distincţie între sistemele de senzori (detectori) şi detectorii
utilizaţi pentru acţionare locală. Un detector local utilizat în intersecţie este conectat la un
controler de acţionare, în timp ce sistemul senzor este conectat la computerul central. În mod
obişnuit, sistemul de senzori colectează date de trafic în locaţii strategice. Tipul detector,
plasamentul şi configuraţia subsistemului detector este dependent de variabilele de măsurat şi
configuraţia sistemului de control. Sistemul poate fi destinat controlului arterelor rutiere,
reţelelor închise, joncţiuni pe autostradă sau zone de control.
Detectorul tip buclă este cel mai cerut pentru controlul semnalelor computerizate, pentru
achiziţia datelor, datorită fiabilităţii, preciziei şi abilităţii de a detecta atât prezenţa cît şi
trecerea vehiculelor. Folosind aceste două posibilităţi de măsurare, anumite variabile cum ar
fi, volumele de trafic, grad de ocupare, viteză, întârziere, opriri, lungimi ale cozilor şi duratele
călătoriilor, pot fi obţinute cu diferite grade de precizie. Aceste variabile sunt legate atât de
fluxurile de trafic ce străbat porţiunea de drum cu detectori cât şi în imediata vecinătate a
detectorilor.
Mărimea cantitativă cel mai uşor de înregistrat este numărul de pulsuri măsurate pe durata
unei perioade de timp. Astfel, un volum înregistrat pentru 15 minute ar reprezenta numărul de
pulsuri înregistrate de detector pentru perioada menţionată.
Gradul de ocupare reprezintă raportul între intervalul de timp cât un detector indică
prezenţa unui vehicul, şi timpul total de măsurare, exprimat în procente, putând lua valori
între 0 – 100% funcţie de intervalele dintre vehiculele ce se urmăresc.
Volumele de trafic şi gradul de ocupare sunt cele mai importante variabile folosite în
selectarea planurilor de semaforizare responsive ca şi pentru multe dintre punctele de început
ale operării. În anumite cazuri volumele de trafic sunt folosite fără a lua în considerare gradul
de ocupare. Când intrările în intersecţie sunt saturate, volumul nu va depăşi o valoare
130

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
constantă care este proporţională cu timpul de verde împărţit la intervalul mediu dintre
vehicule, chiar dacă gradul de ocupare va continua să crească. În general, se cunoaşte faptul
că o valoare care depăşeşte 25%, pentru gradul de ocupare, reprezintă un indicator credibil
pentru a caracteriza începutul congestiei traficului.
Viteza este o altă variabilă utilă în calculele directe şi indirecte ale planurilor de
semaforizare folosind programe optimizate. Pentru o valoare cunoscută a fluxului de vehicule,
viteza este invers proporţională cu gradul de ocupare.
Calculul obişnuit al vitezei constituie surse de erori. De exemplu, vehiculele nu au toate
aceeaşi lungime; măsurătorile privind gradul de ocupare vor conţine, de asemenea, erori dacă
mărimile de ieşire eşantionate sunt mai mari decât cele măsurate continuu; nu toate vehiculele
sunt poziţionate la fel pe bandă atunci când trec peste detector şi, măsurătorile asupra vitezei
sunt realizate într-un punct situat de-a lungul unei porţiuni de drum. O eroare de 20 – 30% la
calculul vitezei reprezintă o valoare obişnuită. Detectorii care lucrează în pereche pot furniza
mai multă acurateţe a vitezelor măsurate.
Acele variabile (întârzieri, opriri, durate ale deplasărilor şi lungimea cozilor) sunt folosite
în principal pentru evaluarea funcţionării sistemului şi este foarte dificil să fie măsurate cu
precizie. Pentru a obţine măsurători acceptabile, în cazul opririlor şi cozilor, trebuie instalaţi
detectori multipli pe fiecare bandă de circulaţie. Numărul de locaţii ale buclelor depinde de
tipul programele individuale care sunt folosite.
7.5.6. CONTROLUL REŢELEI RUTIERE În cazul aplicaţiilor detectorilor se porneşte de la cele două variabile volumul de trafic şi
gradul de ocupare. Obiectivul urmărit de inginerii de trafic este de a găsi programul de
semaforizare care să corespundă fluxul maxim de trafic. Pentru a stabili progresia mişcării
de-a lungul unei artere principale, sistemele de detectare sunt plasate strategic, în locaţii
corespunzătoare curgerii libere a fluxurilor rutiere centrale.
Prin măsurarea condiţiilor de trafic de pe benzile centrale şi benzile exterioare pot fi
calculaţi parametrii de control, cu ajutorul unei unităţi principale de supervizare. În intrările
de traversare a fluxului principal trebuie instalaţi detectori, ca în cazul intersecţiilor cu control
local. Controlerul arterei magistrale selectează un model de trafic pe baza măsurătorilor
efectuate asupra volumelor direcţionale şi/sau gradul de ocupare înregistrate de detectorii
plasaţi pe artera considerată.
Tipul de control specificat pentru sistemele de control al reţelei va defini tipul datelor
culese de către subsistemul de supraveghere. De exemplu, controlul zilnic nu necesită
131

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
detectori deoarece se bazează pe operarea unui ceasornic de control. Prima generaţie de
operare responsivă a traficului se bazează pe identificarea în timp real a tendinţelor traficului
în interiorul reţelei şi identificarea arterelor celor mai încărcate.
Pentru planurile de semaforizare din generaţia de tip responsiv, sunt necesari detectori în
toate intrările. Adaptarea unor criterii adecvate pentru întocmirea programelor de
semaforizare optime permite reducerea numărului de detectori menţinând precizia planurilor
de semaforizare în timp real.
7.5.7. CONTROLUL ŞI SUPRAVEGHEREA AUTOSTRĂZII Detectorii sunt folosiţi, în general, pentru controlul şi supravegherea autostrăzilor în
scopul detectării celor două tipuri de congestii ale traficului: congestia recurentă şi cea ne-
recurentă. Congestia se numeşte recurentă când, atât locaţia cât şi momentul producerii sunt
predictibile, ca de exemplu, perioadele de vârf din cursul săptămânii. Congestia non-recurentă
este definită ca având cauze aleatoare, incidente ocazionale, cum ar fi, blocarea vehiculelor,
accidente, împrăştierea încărcăturii sau alte evenimente impredictibile.
Congestia recurentă rezultă atunci când cererea de trafic depăşeşte capacitatea de
circulaţie a autostrăzii. Măsurile adoptate pentru reducerea congestiei implică descreşterea
cererii în perioada de vârf prin gestionarea activităţii vehiculelor. Soluţiile tehnice adoptate
pot fi: controlul rampelor de intrare, controlul benzilor principale, controlul conexiunilor între
autostrăzi şi controlul coridoarelor de circulaţie.
Detectorii joacă un rol important în diminuarea congestiei recurente, în special în cazul
controlul rampelor de intrare.
Congestia non-recurentă este mult mai dificil de gestionat datorită faptului că nu este
previzibilă. Se cunoaşte că efectele acestor evenimente neprevăzute pot fi cel mai bine
minimizate prin detectarea în timp real a incidentului şi îndepărtarea, cât mai repede cu
putinţă, a cauzei care l-a generat.
Tehnicile de detectare constau într-o varietate de mijloace avansate dar costisitoare,
incluzând televiziunea cu circuit închis, supraveghere aeriană, cabine telefonice de apel în caz
de urgenţă, patrule de circulaţie, etc.
Principalii detectori, având un cost relativ scăzut, instalaţi pe benzile de circulaţie nu sunt
atât de eficienţi în detectarea incidentelor, dar sunt utilizaţi încă pentru detectarea apariţiei
congestiei în afara orelor de vârf, ceea ce semnifică, de obicei, posibila existenţă a unui
incident. Pot fi folosiţi, de asemenea, pentru a determina zona afectată de acesta.
132

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
7.5.7.1. Controlul rampelor de intrare Controlul rampelor de intrare pe autostradă reprezintă una dintre cele mai uzuale metode
de limitare a numărului de vehicule ce pătrund pe o autostradă aglomerată, pe durata perioadei
de vârf.
Controlul rampelor este în general realizat prin închiderea acestora (ceea ce nu necesită
detectori), dar şi prin diferite moduri de control contorizat (de exemplu, controlul prestabilit
(control sensibil la valorile de trafic), controlul convergenţei fluxurilor (exploatarea
intervalelor dintre vehicule şi controlul integrat al rampelor).
7.5.7.2. Închiderea rampelor Închiderea unei rampe de intrare pe autostradă, pe durata perioadei de vârf, este cea mai
simplă tehnică de limitare a vehiculelor de pe autostradă aglomerată.
Metoda este, în acelaşi timp, cea mai restrictivă şi nepopulară pentru public. Ea poate avea
ca rezultat, utilizarea sub capacitate a autostrăzii sau supraîncărcarea rutelor alternative atunci
când este aplicată într-o situaţie nepotrivită. Metoda este recomandată acolo unde, rampa de
intrare introduce probleme legate de undele de şoc sau aspecte negative privind integrarea
fluxurilor în condiţii de aglomerare.
Închiderea rampelor este realizată cu bariere plasate manual, bariere automate sau/şi prin
semnalizare. În oricare din cazuri, nu sunt necesari detectori pentru controlul rampelor,
exceptând probabil, cazul operării barierelor automate.
7.5.7.3. Contorizarea rampelor Contorizarea rampelor a devenit foarte repede o componentă integrată a sistemelor de
control şi supraveghere a autostrăzilor. Contorizarea rampelor constă, în principal, în limitarea
intensităţii cu care traficul poate intra pe autostradă, folosind echipamente de semaforizare, de
obicei localizate pe rampă, cu puţin înainte de intrarea pe autostradă.
Intensităţile măsurate ale traficului pot avea valori minime de 180 - 240 vehicule pe oră la
valori maxime de 750 - 900 vehicule pe oră. Când intensitatea măsurată nu este influenţată
direct de condiţiile traficului magistral, acest control se referă la controlul prestabilit, dar
aceasta nu implică, absenţa detectorilor.
Într-un sistem prestabilit, funcţie de strategia de control folosită, pot fi folosite
următoarele tipuri de detectori.
• Detector de verificare a intrării (cererii): semnalele rămân pe roşu până când este
detectat un vehicul la linia de stop a unui acces şi comandă schimbarea semnalului pe
verde după un timp de roşu minim.
133

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
• Detector de verificare a ieşirii (trecerii): Plasat imediat după linia de stop, este folosit
pentru a asigura intrarea unui singur vehicul, la sfârşitul timpului de verde, imediat ce
vehiculul este sesizat.
• Detector de şir: Plasat mult înaintea semnalului, este folosit pentru a preveni blocajul
de circulaţiei de suprafaţă sau de pe drumurile frontale prin sesizarea vehiculelor care
ocupă o buclă, pentru o perioadă de timp aleasă indicând necesitatea de a modifica
intensitatea fluxului pentru ca şirul să se împrăştie.
• Detector de integrare, convergenţă: Plasat în principal în zonele de contopire a
fluxurilor pentru a sesiza prezenţa vehiculelor aşteptând să se integreze fluxului de
bază.
Sistemul de contorizare prestabilit operează cu un ciclu constant şi poate fi ales pentru o
singură intrare sau pentru contorizarea unui pluton de vehicule. Programul de semaforizare
poate fi ales pentru a servi un număr de vehicule per ciclu de semaforizare.
Sistemul are o serie de avantaje, printre care reducerea congestiei traficului, îmbunătăţirea
duratei deplasărilor, costuri relativ scăzute pentru instalare. Dezavantajul major constă în
faptul că sistemul nu poate răspunde automat schimbărilor condiţiilor de trafic. O schemă
tipică a unui astfel de sistem este redată în figura 7.10.
Figura 7.10. Sistem de contorizare prestabilit.
Spre deosebire de controlul contorizării cu semnale prestabilite, contorizarea dependentă
de trafic este afectată de fluxul de bază şi de condiţiile de trafic de pe rampă. În acest sistem
134

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
valorile de trafic sunt alese pe baza măsurării în timp real a parametrilor de bază ai traficului,
indicând relaţia dintre cererea la intrarea pe magistrală şi capacitatea magistralei.
Se utilizează aceleaşi tipuri de detectori ca cei amintiţi anterior. În plus, anumite sisteme
includ detectori utilizaţi pentru a determina compoziţia traficului, condiţiile atmosferice şi
starea vremii pentru a da posibilitatea sistemului să ia în consideraţie efectele diferiţilor
factori asupra fluxului de trafic. O schemă a acestui tip de sistem este prezentată în figura
7.11.
Figura 7.11. Sistem de contorizare dependent de trafic.
Controlul intervalelor admisibile la integrarea în fluxul de bază este o altă formă de
control al intrărilor pe autostradă cu scopul de a permite unui număr cât mai mare de vehicule
să se integreze în condiţii de siguranţă, fără a cauza întreruperi semnificative fluxului de trafic
de pe autostradă. Acest sistem operează ca răspuns la apariţia intervalelor admisibile pe banda
de pe autostradă în care se vor infiltra vehiculele de pe rampă.
Anumite sisteme pot include detectori pentru vehiculele care se deplasează cu viteză mică
pentru a sesiza prezenţa vehiculelor lente la intrarea pe rampă, vehicule situate între
echipamentul de semaforizare şi detectorul de integrare.
7.5.7.4. Controlul integrat al rampelor Controlul integrat al rampelor, prin definiţie, reprezintă aplicarea controlului rampelor
pentru o serie de intrări luând în considerare interdependenţa dintre rampele controlate.
Astfel, controlul fiecărei rampe se bazează pe relaţia cerere – capacitate pentru întreg sistemul
mai mult decât aceeaşi relaţie, aplicată fiecărei intrări individuale.
135

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
Figura 7.12. Sistem de control integrat al rampelor.
O trăsătură semnificativă a controlului integrat al rampelor este interconectarea dintre
controlerele de rampă ceea ce permite ca condiţiilor existente într-o intrare să influenţeze
valoarea fluxului rutier a celorlalte intrări.
Planurile de semaforizare în timp real sunt calculate şi actualizate de către un computer
central, pe baza informaţiilor obţinute de la detectorii localizaţi de-a lungul sistemului. O
reprezentare schematică a unui astfel de sistem este redată în figura 7.12.
7. 6. ALTE APLICAŢII ALE TEHNOLOGIILOR DE DETECTARE
Detectorii de trafic sunt utilizaţi în multiple aplicaţii, altele decât detectarea traficului în
intersecţiile semaforizate şi controlul autostrăzilor. Aceste aplicaţii includ monitorizarea
vitezei, numărători ale volumelor de trafic, clasificarea vehiculelor şi aplicaţii privind
siguranţa.
7. 6.1. MONITORIZAREA VITEZEI
Când au apărut primele restricţii de viteză, studiile au fost îndreptate spre evaluarea
echipamentelor disponibile în acest scop. Se dispunea de patru tipuri diferite de senzori: buclă
136

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
inductivă, tuburi pneumatice, cabluri piezo-electrice şi înregistrare pe casete. Dintre toate, şi
în această aplicaţie, cea mai favorabilă alternativă a oferit-o detectorul tip buclă.
Caracteristicile optime ale unei unităţi de detectare pentru măsurarea vitezei au fost
considerate:
• autoreglaj pentru a reduce abaterea;
• timp de răspuns scurt de la interceptarea unei treceri;
• sensibilitate înaltă fără întârzieri apreciabile de timp;
• localizare precisă a vehiculului la începutul şi la sfârşitul detectării independent de
viteza vehiculului sau de lungimea cablului de racordare.
Când sunt folosite două bucle pentru a măsura viteza, buclele inductive vor fi suficient de
mari pentru a sesiza vehiculele puternice şi pentru a furniza o amprentă definită de unda
frontală de ieşire, dacă vehiculul trece peste buclă cu o diferenţă oricât de mică de timp între
diferitele tipuri de vehicule. Buclele trebuie plasate suficient de departe astfel încât orice
diferenţă între momentul interceptării a celor două circuite ale buclelor detectoare este mică
când se compară cu momentul trecerii de la prima la cea de-a doua buclă.
În măsurarea vitezelor s-au dovedit eficiente buclele de dimensiunea 1,5 x 1,8 m, a căror
alegere depinde de lăţimea benzii de circulaţie. Este permis un spaţiu de cel puţin 0,8 m de la
axul drumului la marginea buclei pentru a evita activarea de către traficul benzii alăturate.
Pentru benzile având o lăţime de 3,6 m, ar trebui folosită o buclă de 1,8 x 1,8 m pentru a
garanta că nu sunt omise date.
Figura 7.13. Amplasarea buclei inductive pentru măsurarea vitezei.
Distanţa dintre bucle, în cazul măsurării vitezei, se recomandă să fie de 4,9 m între
marginile cablului celor două bucle de 1,8 m.
137

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
Sensibilitatea celor două unităţi de detectare trebuie setată la aceeaşi valoare, în caz
contrar - timpul de răspuns fiind legat direct de sensibilitate – vor fi introduse erori de
măsurare.
Încă din anii 1980, au fost obţinuţi timpi de răspuns foarte buni datorită utilizării
tehnologiei noilor componente electronice. Un exemplu de plasare a detectorilor pentru
măsurarea vitezei este prezentat în figura 7.13.
În cazul circulaţiei pe autostradă, din condiţii de siguranţă a traficului, sunt monitorizate
vitezele, fiind astfel identificate vehiculele cu viteze superioare vitezei limită admise.
Pentru a se diminua riscul unui potenţial accident, în astfel de locaţii este eficient un
sistem de măsurare a vitezei şi avertizarea conducătorilor auto, prin intermediul semnalelor
intermitente, asupra vitezei de deplasare potrivite. Pentru conducătorii care depăşesc viteza
admisă, apare mesajul „ÎNCETINEŞTE” SAU „ATI DEPĂŞIT VITEZA LIMITĂ”.
În anumite situaţii, geometria intersecţiilor împiedică observarea semnalelor luminoase de
către conducătorii auto, pentru a putea reacţiona în timp util. În plus, pot exista piedici legate
de distanţele de vizibilitate datorate obstacolelor fixe înalte, cum ar fi poduri sau copaci, şi
care nu pot fi deplasate. Rezolvarea unor astfel de situaţii necesită semnale avertizând asupra
necesităţii limitării vitezei sau chiar a opririi automobilului.
Criteriile utilizate în dezvoltarea acestui tip de sistem de avertizare includ:
• Montarea semnului alături de drum sau suspendat la cel puţin 5,2 m deasupra solului,
literele având 30 cm înălţime şi balize plasate la 30 cm.
• Afişarea mesajului „PREGĂTEŞTE OPRIREA LA SEMNALUL INTERMITENT”
7.6.2. CLASIFICAREA ŞI NUMĂRAREA VEHICULELOR
Buclele inductive au înlocuit în ultimul deceniu tuburile pneumatice utilizate pentru
numărarea vehiculelor. Tuburile traversau drumurile fiind vulnerabile la uzură şi rupere în
timpul trecerii vehiculelor.
Buclele inductive încorporate în drum constituie mijloace de măsurare mult mai eficiente.
Mai mult, în cazul unei defectări a buclei, numărarea se opreşte. În cazul tuburilor
pneumatice, înainte de defectare apar distorsiuni de numărare.
Un alt avantaj al buclelor inductive constă în faptul că bucla detectoare produce un singur
semnal de ieşire pentru cele mai multe vehicule, semnal cu privire la numărul punţilor, ceea
ce furnizează o acurateţe sporită datelor.
Comparativ cu de înregistrările de trafic convenţionale, un număr tot mai crescut de
sisteme de semaforizare computerizate folosesc detectori pentru a furniza date asupra
138

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
volumelor de vehicule. Datele colectate sunt transmise direct spre sistemele de computere
care controlează programul de semaforizare.
7.6.2.1. Numărarea vehiculelor cu bucle detectoare Când numărarea vehiculelor se face pe benzi multiple, nu se recomandă folosirea unei
singure bucle care să traverseze toate benzile. În această situaţie dacă un vehicul de pe o
anumită bandă de circulaţie pătrunde pe buclă, înainte ca cel de pe banda alăturată să fi trecut
de buclă, este înregistrat doar un impuls continuu. Aceasta va conduce la valori ale traficului,
situate mult sub cele reale.
Când disciplina benzii de circulaţie este respectată (de ex. fluxurile de trafic îşi păstrează
banda de deplasare), se instalează câte o buclă inductivă pentru fiecare bandă de circulaţie.
În cazul când se constată schimbarea permanentă a benzilor de deplasare se recomandă
instalarea unei bucle inductive între benzi, aşa cum este prezentat în figura 7.14.
În mod ideal, buclele ar trebui plasate în concordanţă cu următoarele restricţii:
• cel mai lat vehicul nu va încăleca mai mult de două bucle;
• cel mai îngust vehicul nu va trece printre două bucle;
• două vehicule alăturate pot să traverseze trei bucle.
Figura 7.14. Amplasarea celor trei bucle inductive pentru numărarea vehiculelor.
Figura 7.14 prezintă trei bucle amplasate pentru un drum cu două benzi de circulaţie.
Operarea buclelor A, B şi C produce imediat o înregistrare. Operarea comună a buclelor A şi
C împreună sau A, B şi C împreună produce o primă înregistrare şi, după o scurtă întârziere, a
doua înregistrare.
Operarea buclelor singulare sau perechi învecinate (A şi B, sau B şi generează numai o
înregistrare, dar operarea buclelor A şi C simultan produce o înregistrare urmată de a doua la
un interval mic de timp.
139

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
7.6.2.2. Înregistrări cu bucle inductive lungi Numărarea vehiculelor poate fi realizată, de asemenea, cu bucle inductive lungi sau cu
bucle scurte în serie. Acurateţea datelor în cazul măsurătorilor realizate cu ajutorul unei
singure bucle de orice mărime nu poate fi mai mare decât 95%.
Acurateţea datelor provenind de la patru bucle scurte legate în serie este mai scăzută
deoarece configuraţia prezintă o problemă de analiză foarte complexă ceea ce reduce precizia.
Această capabilitate se poate dovedi a fi o perfecţionare majoră pentru tehnologia de detectare
cu bucle inductive.
7.6.2.3. Detectarea direcţională Când este necesar să se facă distincţia între direcţiile de deplasare (de exemplu în cazul
traficului de pe benzile reversibile) se folosesc două bucle, două canale de detectare, şi o
„logică direcţională”, figura 7.15. Cu acest sistem, se pot obţine înregistrări separate în
concordanţă cu direcţia de deplasare. O altă variantă este activarea buclei potrivite, funcţie de
momentul zilei, o dată cu semnalul de control al benzii reversibile.
Figura 7.15. Detectare direcţională.
7.6.3. BUCLE TEMPORARE
Dezvoltarea din ultimii ani a tehnologiilor de detectare a permis apariţia unor bucle având
un raport cost/beneficiu acceptabil şi care răspund nevoilor de monitorizare a vitezelor
vehiculelor, înregistrarea volumelor de trafic, clasificarea vehiculelor şi a cântăririi din mers a
vehiculelor.
7.6.3.1. Bucla tip „covor” Este un tip de buclă de detectare care constă dintr-un covor de cauciuc în care sunt
încorporate bucle multiple. Covorul are, de obicei, o lăţime mai mică decât buclele instalate
clasic. Mărimile standard variază de la 1,2 x 1,8 m la 0,9 x 1,9 m.
Covorul se poziţionează pe mijlocul unei benzi de circulaţie cu lungimea paralelă cu
direcţia fluxului de trafic, astfel încât, cea mai mare parte a traficului, va trece peste acest
140

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
echipament. Un mod obişnuit de instalare a acestui tip de detector este prezentat în figura
7.16.
Figura 7.16. Detector tip „covor” cu bucle inductive.
Covorul este prins de drum cu ajutorul unor cuie şi şaibe de etanşare. Pentru a evita riscul
ruperii marginilor, peste acesta este montat un alt covor, adeziv, cu dimensiuni ce depăşesc
marginile cu 7,5 cm. Racordarea echipamentului de colectare la covorul cu detectori este
realizată prin intermediul ramei dintre cele două straturi. Dezavantajul unui astfel de covor
constă în fiabilitatea scăzută în cazul traficului greu.
7.6.3.2. Dispozitive de clasificare a vehiculelor La baza realizării studiilor de trafic este plasat procesul de numărare a vehiculelor şi în
special înregistrarea vehiculelor pe categorii. Există, la această oră mai multe tipuri de
echipamente de înregistrare. Cele mai multe dispozitive folosesc echipamente de detectare a
punţilor pentru a obţine informaţia necesară clasificării vehiculelor.
Echipamentele moderne permit atât înregistrarea şi clasificarea vehiculelor, cât şi
monitorizarea şi raportarea condiţiilor meteorologice. Unitatea instalată în drum, a acestui
sistem constă dintr-un senzor electronic, un micro-computer şi echipamente pentru
monitorizarea condiţiilor de mediu putând să măsoare temperatura la suprafaţa drumului,
starea pavajului (umed sau uscat), precum şi vizibilitatea.
Senzorul electronic operează prin detectarea micilor perturbaţii ale câmpului energetic
care sunt apoi procesate de către micro-computerul de viteză mare. La trecerea vehiculului
peste, sau aproape, de unitatea de detectare din drum, se realizată o înregistrare în timp real
asupra profilului complet al întregii sale lungimi. La detectarea unui vehicul, se efectuează
înregistrarea şi este calculată viteza. Cunoscând viteza, calculatorul determină lungimea
vehiculului şi, pe baza informaţiilor din program, determină tipul vehiculului. Datele pot fi
stocate şi/sau transferate şi, la cerere, tipărite sau transmite prin modem către computerul
central.
141

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
7.6.4. DETECTORI PENTRU PIETONI Dispozitivele actuale de control al traficului necesită, pe lângă detectarea vehiculelor şi
detectarea pietonilor. Opus principiului de detectare a vehiculului, pietonii nu modifică
câmpul magnetic sau nu produc variaţii ale inductanţei. În plus, pietonii nu au un traseu
specific spre o anumită destinaţie şi nici nu se poate aştepta să acţioneze într-un anumit mod
pentru a-şi face simţită prezenţa la un semafor.
Figura 7.17. Detector activ pentru pietoni.
Detectorul tip buton este cea mai obişnuită formă de
detectare utilizată de pietoni. Detectorul este acţionat de către
un pieton care, apăsând butonul produce închiderea unui
contact. Astfel, este permisă trecerea unui curent de mică
intensitate către controlerul de trafic care înregistrează o
„cerere” de serviciu pentru pietoni.
Detectorii pentru pietoni pot fi pasivi, ca cel descris anterior,
sau activi. Detectorul activ oferă un răspuns când este activat,
prin afişarea unui semnal luminos sau un mesaj care invită
pietonul să aştepte, în plus poate da informaţii cu privire la timpul disponibil pentru
traversare, afişând numărarea inversă (fig. 7.17). Perfecţionarea tehnologiilor recente bazate
pe microunde indică faptul că detectorii de prezenţă destinaţi pietonilor pot fi viabili, figura
7.18. Un senzor utilizând această tehnologie este instalat suspendat sau în bătaia semaforului
şi detectează prezenţa continuă a unui obiect din câmpul de vedere.
a)
b)
Figura 7.18. Detectori cu microunde pentru detectarea pietonilor care staţionează pe trotuar (a) sau se deplasează încet pe trecerea de pietoni (b).
Covoarele de presiune, asemănătoare celui destinat închiderii automate a uşilor, sunt folosite în anumite locaţii pentru detectarea pietonilor. Acestea sunt instalate pe trotuar, aproape de trecerea de pietoni. Când un pieton stă pe covor, este închis un contact şi se transmite un semnal către controler. Covorul nu poate identifica direcţia, astfel încât poate fi înregistrat un semnal fals.
142

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
BIBLIOGRAFIE
1. CHEN, W.F.: Civil Engineering Handbook, USA, 1995.
2. CIUCU, G. şi CRAIU, V.: Introducere în teoria probabilităţilor şi statistică matematică. Editura didactică şi pedagogică, Bucureşti, 1971.
3. DREW, D.R.: Traffic Flow Theory and Control. New York, Mc Graw-Hill, 1968.
4. EDWARDS, J.D.: Transportation Planning Handbook. Institute of Transportation Engineer, and Prentice Hall, New Jersey, 1992.
5. FLOREA, D.: Aplicaţii telematice în sistemele avansate de transport rutier - Editura Universităţii Transilvania din Braşov, 2004, ISBN 973–635–258-7.
6. FASTENRATH, U.: Floating Car Data on a Larger Scale.
7. FLOREA D. ş.a: Sisteme avansate de transport rutier, Editura Universităţii “Transilvania" din Braşov, 2007, ISBN 978-973-635-775-6.
8. FLOREA, D. ş.a: Managementul traficului rutier, Ediţia a II-a, completată, Editura Universităţii Transilvania din Braşov”, 2000, ISBN 973 –9474-55-1.
9. FLOREA, D.: Metode şi mijloace de coordonare a traficului rutier - Referat nr.1, Universitatea Transilvania Braşov, 1994.
10. FLOREA, D.: Fluxuri rutiere – programare, coordonare, Reprografia Universităţii
“Transilvania” din Braşov, 1998, Curs pentru formarea continuă a specialiştilor în cadrul IPIMEA Braşov.
11. FLOREA, D.; PREDA, I.: Aplicaţii ale teoriei şirurilor de aşteptare în managementul
traficului rutier, Buletinul Ştiinţific al celei de-a XXVIII-a sesiuni de comunicări ştiinţifice cu participare internaţională, 21-22 oct. 1999, Bucureşti.
12. FOGIEL, M.: Handbook of Mathematical, Scientific and Engineering Formulas, Tables Functions, Graphs, Transforms, New Jersey, 1980.
13. FORBES, T.W., ş.a.: Measurement of Driver Reaction to Tunnel Conditions. Proceedings of the Highway Research Board 3, 1959.
14. FRUNZĂ, V.: Psihologia circulaţiei rutiere. Editura Ştiinţifică, Bucureşti, 1975
15. GAZIS, D. C., HERMAN, R. and POTTS, R. B.: Car Following Theory of Steady State Traffic Flow. Operations Research 7 (4), 1959.
16. GAZIS, D. C., HERMAN, R. and ROTHERY, R. W.: Non-Linear Follow the Leader Models of Traffic Flow. Operations Research, 9, 1961.
17. GAZIS, D. C., HERMAN, R. and ROTHERY R. W.: Analytical Methods in Transportation:
Mathematical Car-Following Theory of Traffic Flow. Journal of the Engineering Mechanics Division, ASCE Proc. Paper 3724 89(Paper372), 1963.
18. GHINEA, M.: MATLAB, Calcul numeric – aplicaţii, Editura Teora, 1996. 19. GREENBURG, H.: An Analysis of Traffic Flow. Operations Research 7(I), 1959.
20. HAIGHT, F.A.: Mathematical Theories of Traffic Flow, London, New York, Academic Press, 1963
21. HICKS, T.: Standard Handbook of Engineering Calculations, 3rd Edition, USA, 1995.
22. HOBBS, F.D.: Traffic Planning & Engineering. Pergamon Press, Oxford, New York, Toronto, Sydney, Paris, Frankfurt, 1979
23. JIREGHIE, C. ş.a.: Semaforizarea intersecţiilor stradale, Ed.Tehnică, Bucureşti, 1977. 24. JURGEN K. R.: On and Off Board Diagnostics. 25. KELL, J., FULLERTON, I., MILLS, M.: Traffic Detectors Handbook, Second edition,
143

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
Publication No. FHWA – IP – 90 – 002, 1990. 26. KOPPA, R.: Human factors, in Traffic Flow Theory, TRB Committee, 1987
27. MANNERING, F. ş.a.: Principles of Highway Engineering and Traffic Analysis, John Wiley & Sons, New York, 1990.
28. MARGARIT, N.: Intersecţii de străzi, noduri şi pieţe de circulaţie. Editura Tehnică Bucureşti, 1967.
29. MAY, A. D.: Traffic Flow Fundamentals. Prentice Hall, Englewood Cliffs, New Jersey, 1990. 30. MERRITT, FR.: Standard Handbook for Civil Engineers, USA, 1989.
31. MEYER, D.M.: Urban Transportation Planning, Mc Gaw Hill, Series Transportation, USA, 1986.
32. NICHIFOR, G.: Dicţionar englez-român, român-englez, Ed. Lider, Bucureşti, 1996. 33. NISHIKAWA, S., ENDO, H.: Applications of Millimeter-Wave Sensors in ITS. 34. PAPACOSTAS, C.S.: Transportation Engineering and Planning, New Jersey, 1993. 35. PEARSON, E.C.: Handbook of Applied Mathematics, 2nd Edition, New York, 1983.
36. PEREŞ, GH. ş.a.: Teoria traficului rutier şi siguranţa circulaţiei, Universitatea din Braşov, 1982.
37. ROTHERY, R.: Car following models, in Traffic Flow Theory, TRB Committee, 1987.
38. TIRON, M.: Analiza preciziei de estimare a funcţiilor aleatoare, Editura Tehnică, Bucureşti, 1981.
39. TIRON, M.: Prelucrarea statistică şi informaţională a datelor de măsurare, Editura Tehnică, Bucureşti, 1977.
40. TIRON, M.: Teoria erorilor de măsurare şi metoda celor mai mici pătrate, Editura Tehnică, Bucureşti, 1972.
41. TURNER, S. s.a.: Travel Time Data Collection Handbook, Report No. FHWA –Pl-98-035, Office of Highway Information Management, Texas Transportation Institute, 1998.
42. WEBSTER, F.V.: Traffic Signal Settings, Road Res. Tech. Paper, Nr.39, British Road Res.1958.
43. WILKES, M.: Operational Research: Analysis and Applications, London, 1989.
44. WINSTON, L.W.: Operations Research Applications and Algorithms, Belmont, California, 1991.
45. WRIGHT, P.; ASHFORD, N.: Transportation Engineering, John Wiley & Sons, New York, 1997.
46. WORTMAN, R. H., MATTHIAS, J. S.: Evaluation of Driver Behavior at Signalized Intersections. Transportation Research Record 904, TRB, NRC, Washington, DC, 1983.
47. YOSHIDA T., KURODA H., NISHIGAITO T.: Adaptive Driver-assistance Systems. 48. *** Advanced drive assistance systems for Europe. 49. *** Anuar statistic 50. *** A Policy on Geometric Design of Highways and Streets, AASHTO, 2004. 51. *** Arhitecture Developement Team, “ITS User Services Document”, January 2005. 52. *** Automotive Cameras For Safety and Convenience Applications. 53. *** Automotive Handbook, 3rd and 4th Edition, Robert Bosch GmbH. 54. *** California PATH, Partners for Advanced Transit and Highways, 2000. 55. *** Car Office. Your Office On The Road. 56. *** Design standards for urban infrastructure - 3 Road design. 57. *** Evoluţia tehnologiei, Scientific American, Editura Aquila’93, Oradea.
144

MANAGEMENTUL TRAFICULUI RUTIER ŞI TELEMATICĂ RUTIERĂ
58. *** Highway Capacity Manual, TRB, 1997 sau 2000. 59. *** Global Positioning System Location Determination. 60. *** Highway design manual Connecticut Department of Transportation, january 1999
61. *** Indicators for the integration of environmental concerns into transport policies, ENV/EPOC/SE(98)1/FINAL, 82546OECD, 1999.
62. **** Intelligent Transport System, European Commission, Energy and Transport DG, 2003 63. *** Intelligent Vehicle Initiative, Annual Report, 2001.
64. ***Manual on Uniform Traffic Control Devices MUTCD 2000, US Department of Transportation, Federal Highway Administration, 2000.
65. *** Mică Enciclopedie De Matematică, Editura Tehnică, Bucureşti, 1980. 66. *** Mobile GT Driver Profile Controller. 67. *** NCHRP Report 383, Intersection Sight Distance, Transportation Research Board, 1996.
68. ***OECD Route Guidance: An In-Car Communications system, Road Transport Research Series, OECD Publications, Paris, 1988.
69. *** Revista Telematics Update Magazine, 2003. 70. *** SR 10144-4/ 1995, Amenajarea intersecţiilor de străzi, IRS 1995. 71. *** Staying awake at the wheel. Fraunhofer Magazine (2/2004). 72. *** STAS 10144/5-89, Calculul capacităţii de circulaţie a străzilor, IRS, 1989.
73. *** STAS 11416-80, Tehnica traficului rutier, Capacitatea de circulaţie a drumurilor, IRS, 1980.
74. *** STAS 6926/11-89, Măsurarea vitezelor şi a timpilor de accelerare, IRS 1989. 75. *** STAS 7348-67, Lucrări de drumuri, IRS 1967.
76. *** STAS 7348-78, Echivalarea vehiculelor pentru determinarea capacităţii de circulaţie, IRS, 1978.
77. *** Traffic Engineering Handbook, Institute of Transportation Engineers (1992). Washington, DC.
78. *** Traffic Flow Theory, Transportation Research Board Special Report 165, 1975 79. *** Traffic Information Tomorrow – from One Car To Another. 80. *** Traffic Manual, M 51-02, Washington State, DOT, Operations and Maintenance Office.
81. *** Traffic Signals and Lighting in Traffic Manual, Chapter 9, State of California Business, Transportation and Housing Agency Department of Transportation.
82. *** Vision For Vehicles. Active Systems, Safer Cars.
145