Structuri 1
3
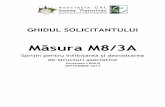
1. Spaţiul de lucru şi spaţiul robot Spaţiul de lucru caracterizează poziţia şi orientarea OL cât şi a diferitelor elemente ale structurii în sistemul de axe de coordonate cartezian în care este definit robotul (fig. 1). Sistemele de axe pot fi: - cel fix {0} legat de elementul fix 0 ; - sistemele de axe legate de elementul i {i} (i = 1…n). În exemplu din fig. n = 5. Fig. 1 Interesează în deosebi elementele punctului caracteristic M legat de OL solidar cu elementul n (5 în exemplu). În cadrul spaţiului de lucru se consideră şi vitezele şi acceleraţiile diferitelor puncte. Pentru
-
Upload
ion-tomita -
Category
Documents
-
view
217 -
download
3
description
jjj
Transcript of Structuri 1
Curs Roboti
1. Spaiul de lucru i spaiul robot
Spaiul de lucru caracterizeaz poziia i orientarea OL ct i a diferitelor elemente ale structurii n sistemul de axe de coordonate cartezian n care este definit robotul (fig. 1).
Sistemele de axe pot fi:
cel fix {0} legat de elementul fix 0 ;
sistemele de axe legate de elementul i {i} (i = 1n). n exemplu din fig. n = 5.
Fig. 1
Intereseaz n deosebi elementele punctului caracteristic M legat de OL solidar cu elementul n (5 n exemplu).
n cadrul spaiului de lucru se consider i vitezele i acceleraiile diferitelor puncte. Pentru corpuri intereseaz orientarea acestora, iar din punct de vedere cinematic viteza lor unghiular (sau alt parametrun corelat).
Spaiul robot caracterizeaz poziia i cinematica relative dintre elemente, fiind utilizat pentru comanda i acionarea robotului. Poziia relativ a dou elemente succesive ale structurii se d prin coordonatele robot care pentru cuplele de rotaie sunt unghiurile relative dintre elemente. n cazul structurii din fig. 1 de tipul RRTRR, care are 4 cuple de rotaie sunt introduse coordonatele robot: q1, q2, q4 i q5. Pentru cupla de translaie (dintre elementele 2 i 3) coordonata robot este q3 ce reprezint poziia relativ n sensul axei X2. a elementului 3 fa de elementul 2.
2. Modelele de calcul ale structurii
Att n etapa concepiei ct i n cea a realizrii operaiilor pentru comand, structurile mecanice necesit efectuarea unor calcule pe baza anumitor modele matematice, ca: modelelul direct geometric i cinematic:
1) Modelul geometric direct care exprim poziia i orientarea corpului manipulat n spaiul de lucru, n funcie de parametrii geometrici ai cuplelor (unghiurile de poziionare din cuplele de rotaie i poziia relativ din cuplele de translaie).
Modelul cinematic direct permite, ca dup determinarea geometric direct i cunoscnd cinematica coordonatelor robot (vitezele i acceleraiille din cuplele structurii), s se calculeze vitezele i acceleraiile liniare ale elementelor structurii.2. Modelul invers geometric i cinematic
a) Modelul geometic invers. Aici sunt cunoscute poziia i orientarea obiectului manipulat i se cere determinarea parametrilor geometrici ai cuplelor.
b) Modelul cinematic invers. Dup rezolvarea modelului geometric invers i fiind cunoscute cinematica liniar i unghiular a elementului manipulat vor fi determinai parametrii cinematici ai micrilor din cuple (vitezele i acceleraiile relative ale celor dou pri ale cuplei).
Modelul dinamic.
a) Modelul dinamic direct. Fiind rezolvat modelul geometric i cinematic direct i avnd, n plus, datele ineriale ale elementelor (mase i momente de inerie) se calculeaz forele motoare generalizate din cuple (fore motoare pentru cuplele de translaie i, respectiv, momente motoare pentru cuplele de translaie).
b) Modelul dinamic invers. Reprezint problema general a dinamicii structurii. Fiind cunoscute forele generalizate din cuple se cere determinarea micrii structurii.
Sub aspect formal, caracterizarea de direct sau invers referitor la modelul dinamic uneori apare inversat. Aici a fost preferat clasificarea de mai sus, din considerente de simetrie cu celelalte modele.




![Standard Inginer Proiectant Structuri[1]](https://static.fdocumente.com/doc/165x107/5571f39749795947648e49ac/standard-inginer-proiectant-structuri1.jpg)












