Solving Problems by Searching - Santa Clara Universitytschwarz/COEN266/Searching.pdf · Recurring...
60
Solving Problems by Searching Artificial Intelligence Santa Clara University 2016
-
Upload
truonglien -
Category
Documents
-
view
226 -
download
8
Transcript of Solving Problems by Searching - Santa Clara Universitytschwarz/COEN266/Searching.pdf · Recurring...
Solving Problems by Searching
Artificial Intelligence Santa Clara University 2016
Problem Solving Agents• Problem Solving Agents
• Use atomic representation of states • Planning agents
• Use factored or structured states
• Uninformed search algorithms • Algorithms only use state space
• Informed search algorithms • Algorithms use some guidance where to find
solution
Problem Solving Agents• Problem formulation
• What actions and state to consider • Goal formulation
• What is a desirable state
Problem Solving Agents• First set of assumptions
• Environment is observable• Agent knows current state
• Environment is discrete • In any state, there are only a finite number of
actions to be taken (and states to be reached) • Environment is known
• Agent knows which states are reached by what action
• Environment is deterministic • Each action has exactly one outcome
Problem solving agents• Search:
• Looking for a sequence of actions that lead to the (a) goal
• Execution: • Follow the sequence of actions
• Formulate - Search - Execute• Notice: agent does not react to precepts during the
execute phase • Open loop system: loop between agent and
environment is broken
Problem Solving Agents• Well-defined problem
1. Initial state 2. Descriptions of actions 3. Transition model: Which action leads to what
state 4. Goal test 5. Path cost
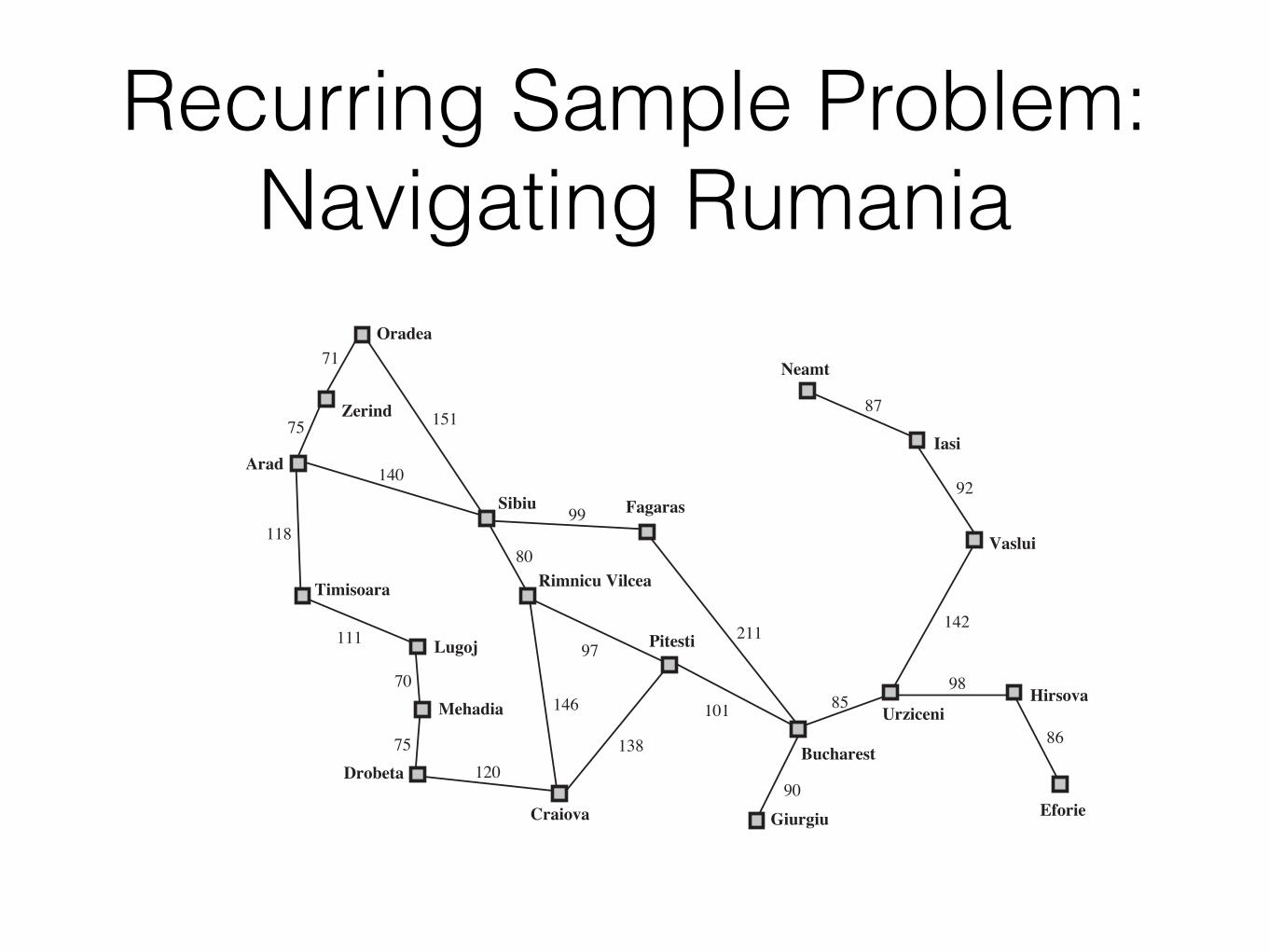
Recurring Sample Problem: Navigating Rumania
Giurgiu
UrziceniHirsova
Eforie
NeamtOradea
Zerind
Arad
Timisoara
Lugoj
Mehadia
Drobeta
Craiova
Sibiu Fagaras
Pitesti
Vaslui
Iasi
Rimnicu Vilcea
Bucharest
71
75
118
111
70
75120
151
140
99
80
97
101
211
138
146 85
90
98
142
92
87
86
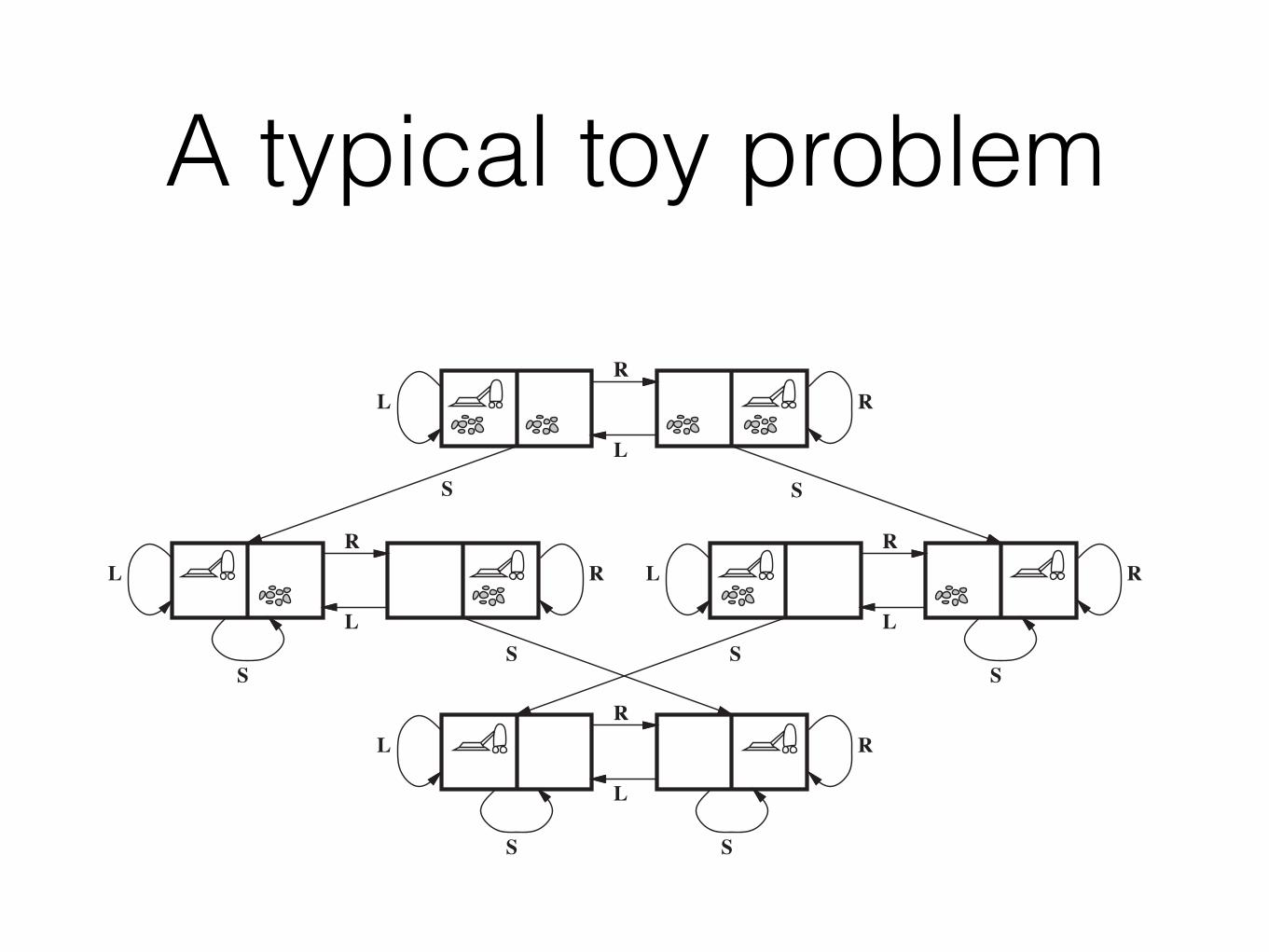
A typical toy problem
R
LS S
S S
R
L
R
L
R
L
S
SS
S
L
L
LL R
R
R
R
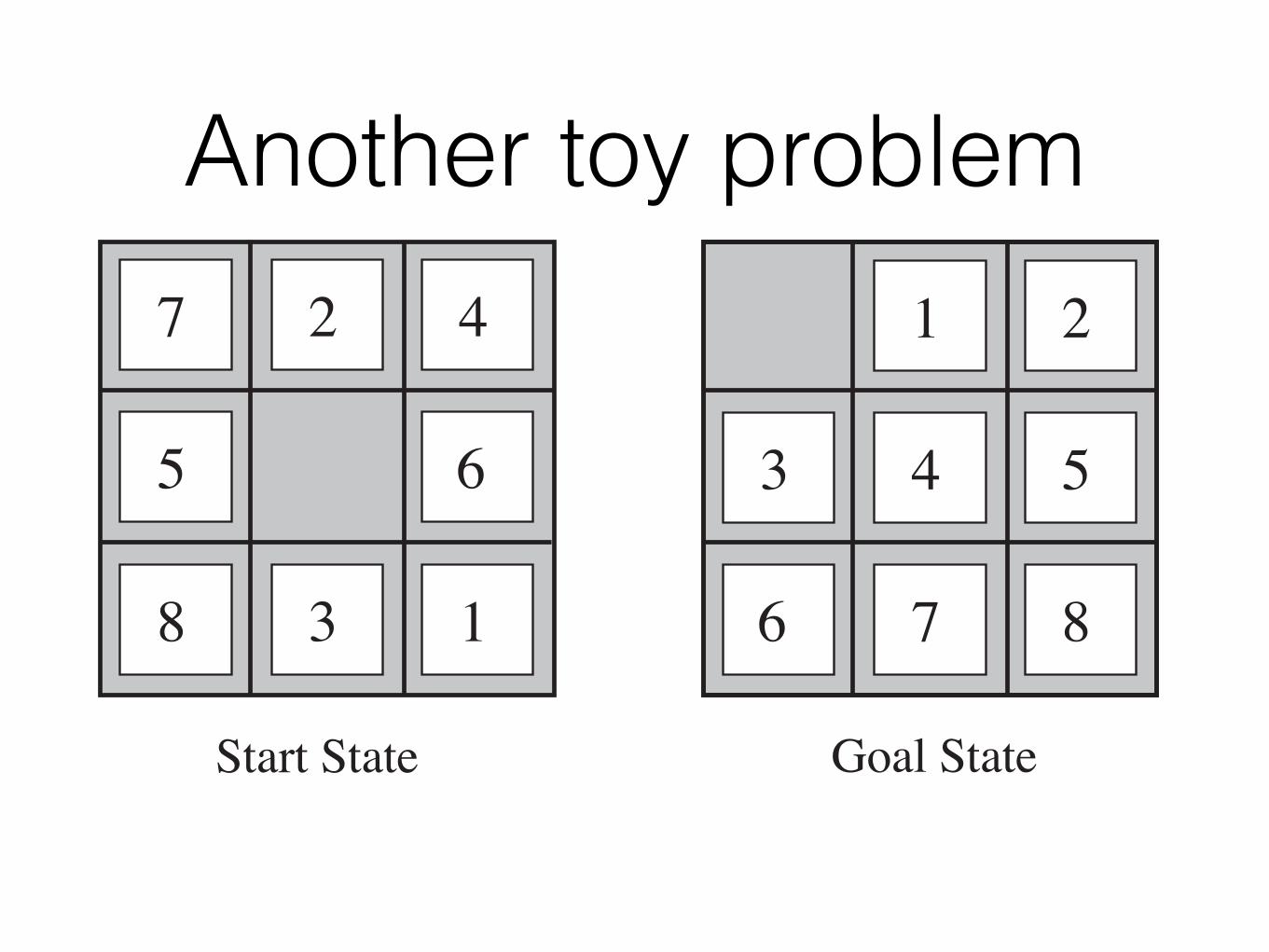
Another toy problem2
Start State Goal State
1
3 4
6 7
5
1
2
3
4
6
7
8
5
8
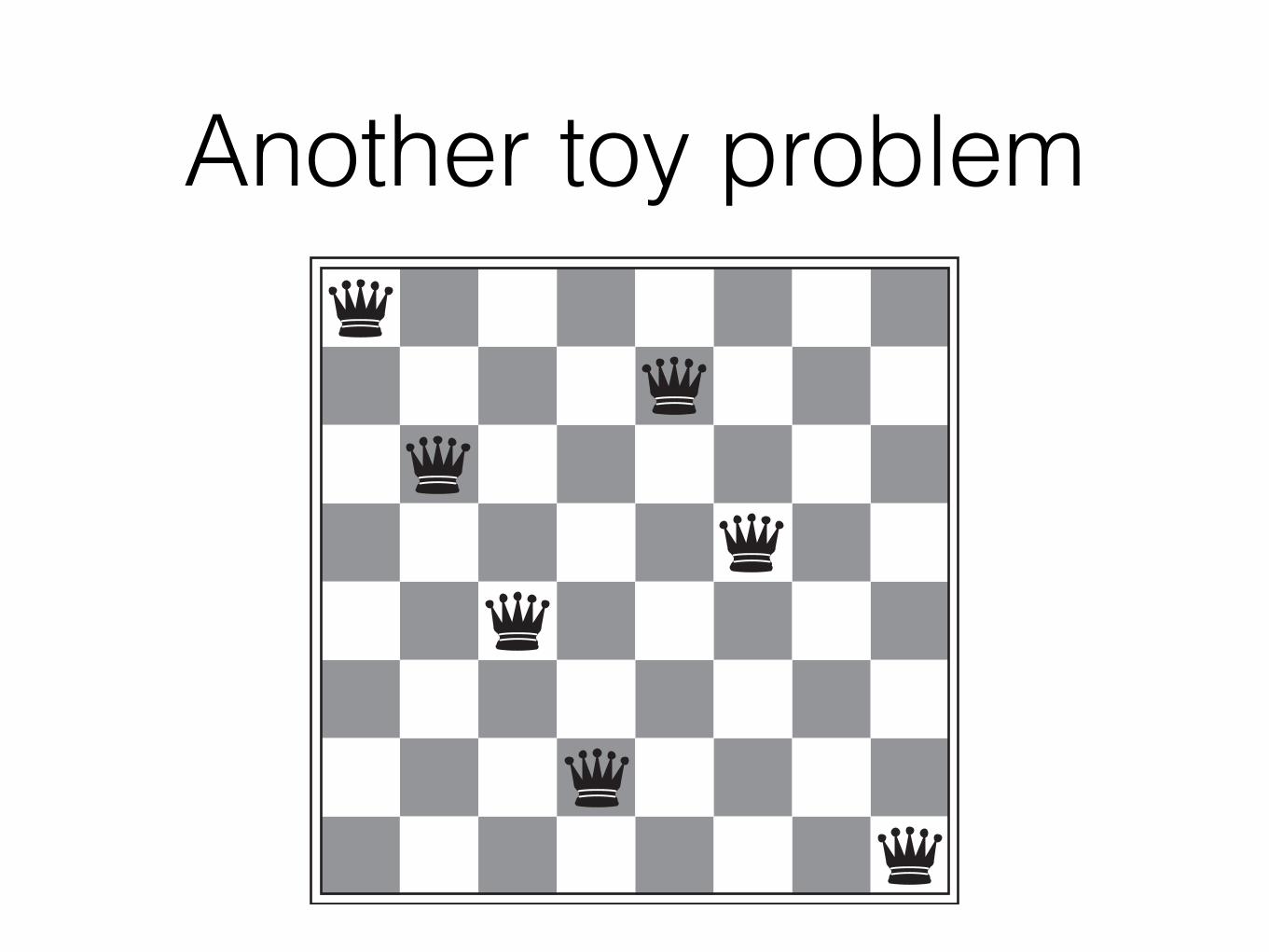
Another toy problem
A simple real world problem• Find a flight from A to B (with stop overs)
Uninformed Searching• Uninformed searching
• Go through the search space looking for a state that fulfills the goal condition
• Search space represented as a graph of nodes • Expand nodes (create all the neighbors of the
current node)
Uniformed Searching• State examples:
• 8-puzzle • State given by a matrix with entries 0-8
• 0 represents the blank space • Note: for half of the initial states, there is no
solution
_goal_state=[[1,2,3],
[4,5,6],
[7,8,0]]
https://gist.github.com/flatline/838202
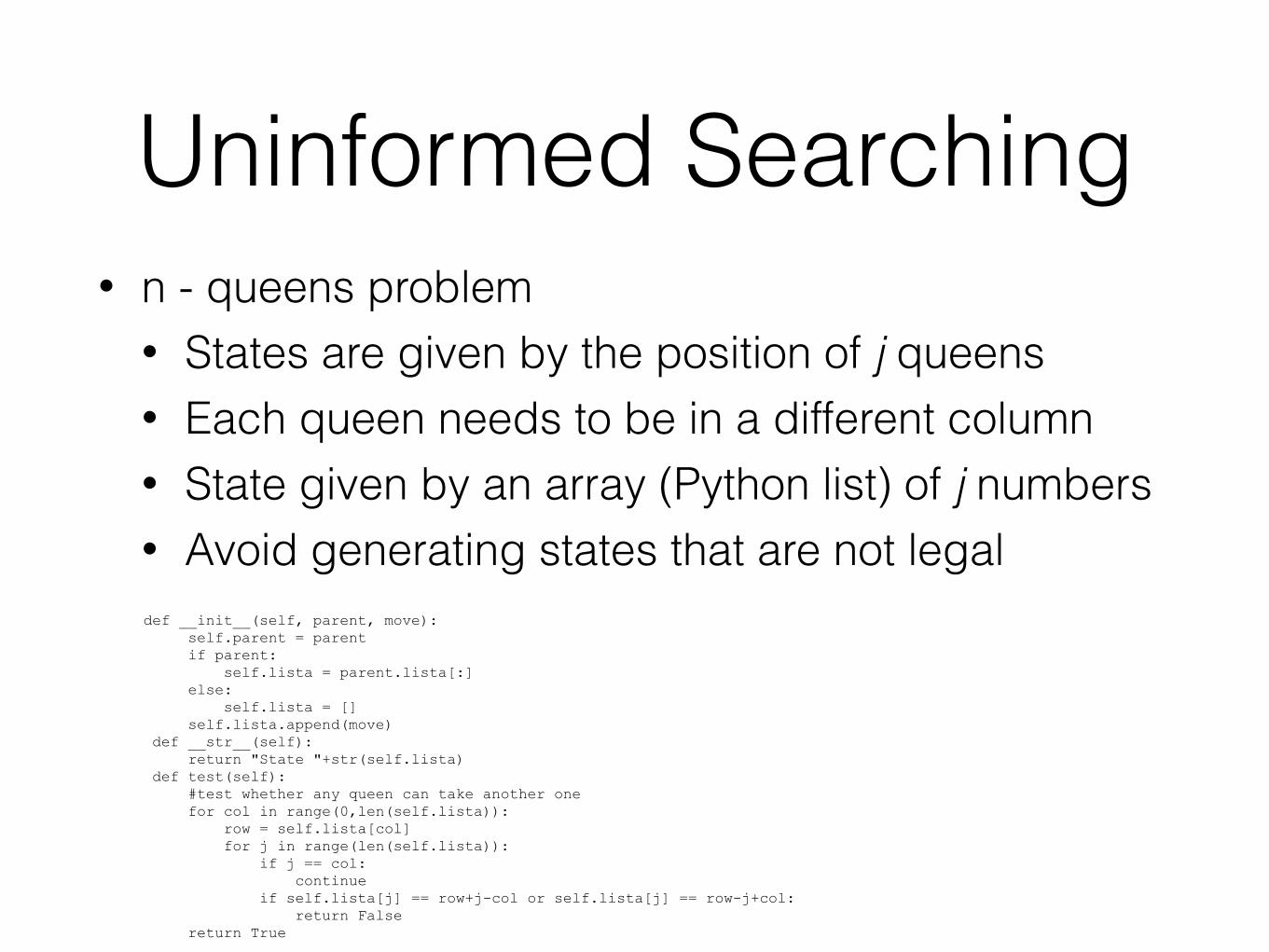
Uninformed Searching• n - queens problem
• States are given by the position of j queens • Each queen needs to be in a different column • State given by an array (Python list) of j numbers • Avoid generating states that are not legal
def __init__(self, parent, move): self.parent = parent if parent: self.lista = parent.lista[:] else: self.lista = [] self.lista.append(move) def __str__(self): return "State "+str(self.lista) def test(self): #test whether any queen can take another one for col in range(0,len(self.lista)): row = self.lista[col] for j in range(len(self.lista)): if j == col: continue if self.lista[j] == row+j-col or self.lista[j] == row-j+col: return False return True
Uninformed Searching• When generating nodes, can revisit the same node
• Repeated state — Loopy path • Search tree is then infinite, even though state
space is finite • Assuming going from one state to another incurs
costs • Assuming costs add up • Then loopy paths never are cost-optimal
Uninformed Searching
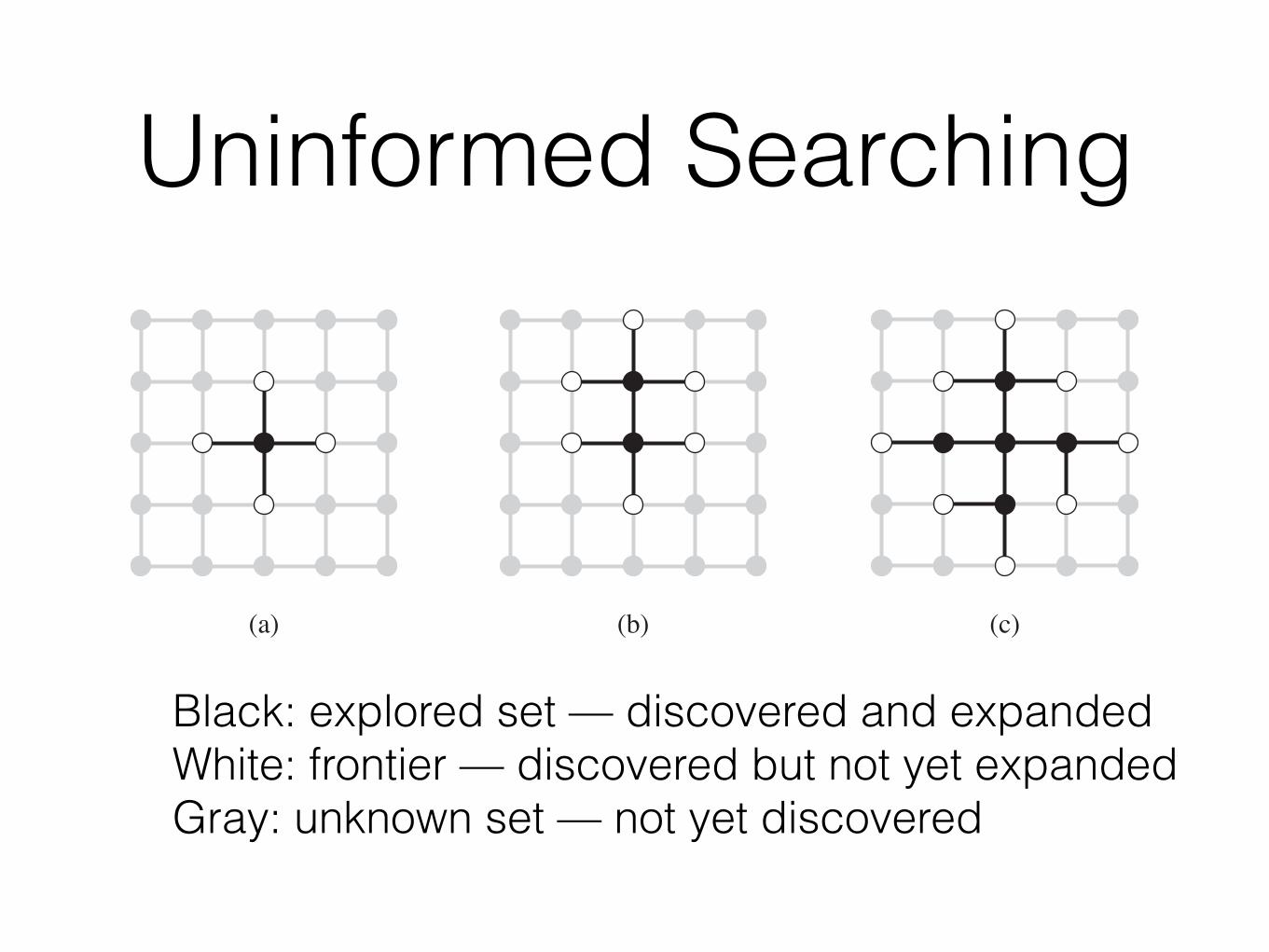
(c)(b)(a)
Black: explored set — discovered and expanded White: frontier — discovered but not yet expanded Gray: unknown set — not yet discovered
Example
Giurgiu
UrziceniHirsova
Eforie
NeamtOradea
Zerind
Arad
Timisoara
Lugoj
Mehadia
Drobeta
Craiova
Sibiu Fagaras
Pitesti
Vaslui
Iasi
Rimnicu Vilcea
Bucharest
71
75
118
111
70
75120
151
140
99
80
97
101
211
138
146 85
90
98
142
92
87
86
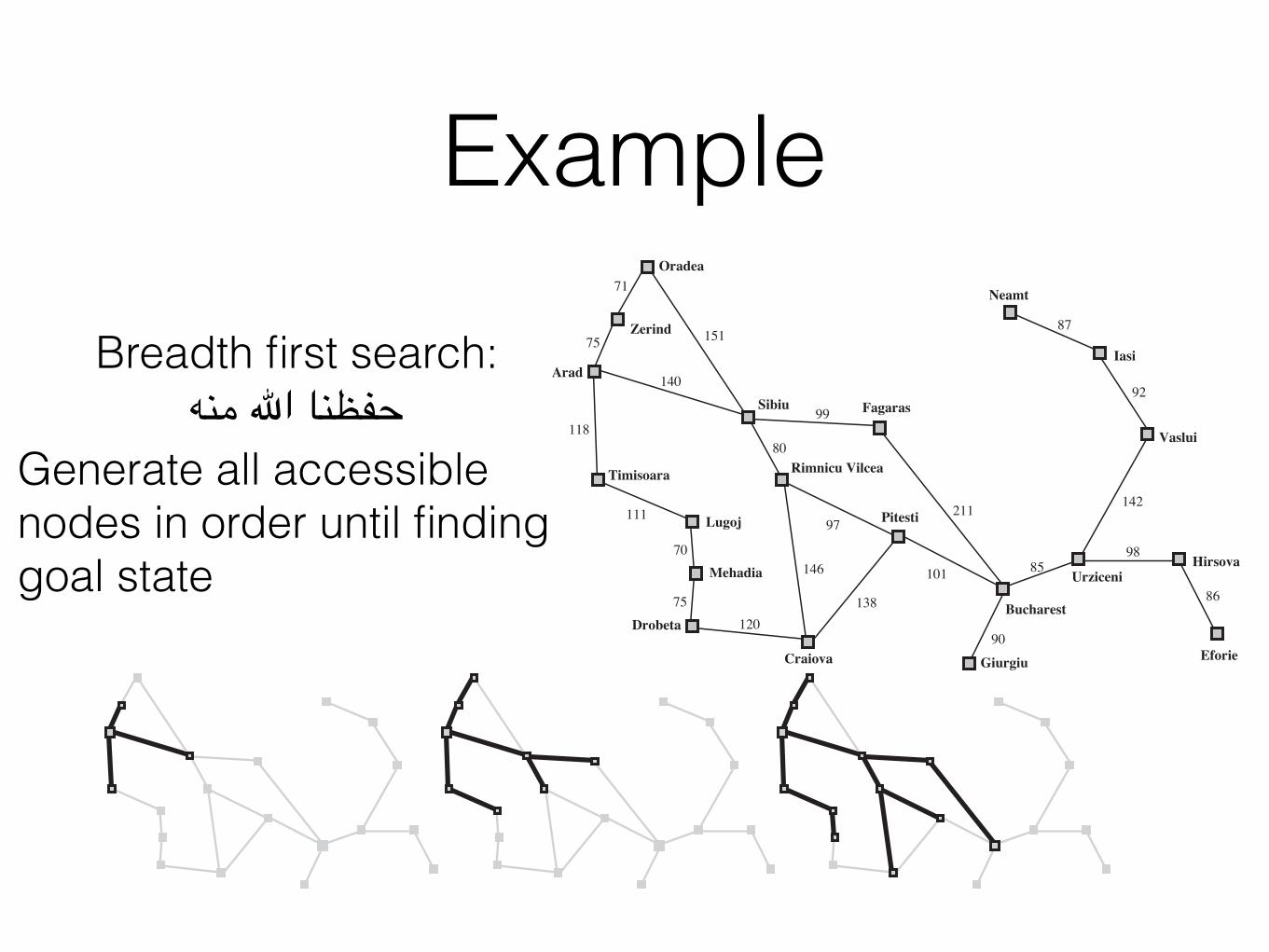
Breadth first search: حفظنا اهلل منه
Generate all accessible nodes in order until finding goal state
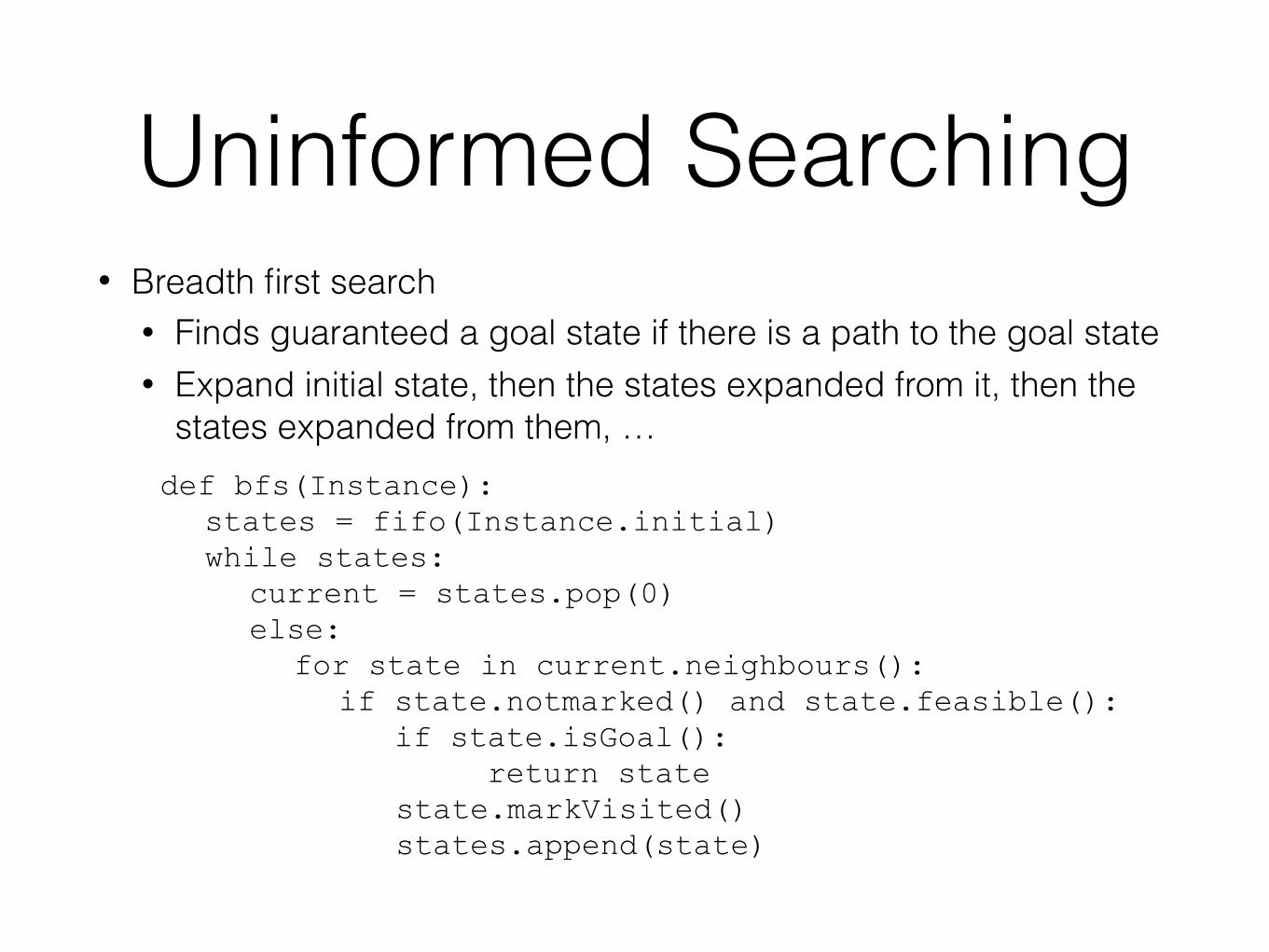
Uninformed Searching• Breadth first search
• Finds guaranteed a goal state if there is a path to the goal state • Expand initial state, then the states expanded from it, then the
states expanded from them, …def bfs(Instance):
states = fifo(Instance.initial) while states:
current = states.pop(0) else:
for state in current.neighbours(): if state.notmarked() and state.feasible(): if state.isGoal(): return state state.markVisited() states.append(state)
Uninformed Search• BFS: Will find closest goal node
• Assume a branching factor of b • Number of unexplored nodes reachable from a
node during the breadth-first search • Assume nearest goal state is at distance d from
the initial state • BFS creates
nodesb+ b2 + b3 + . . .+ bd = O(bd)
Uninformed Search• BFS:
• Memory is stressed: too many nodes kept in fifo queue
• Time needs depends on the depth of the search
Uninformed Search• Uniform cost search:
• Assume that all state transitions incur a cost • g(node) = cost to reach node from initial node • Expand the node n with the lowest path cost g(n) • Apply goal test only when the node is expanded
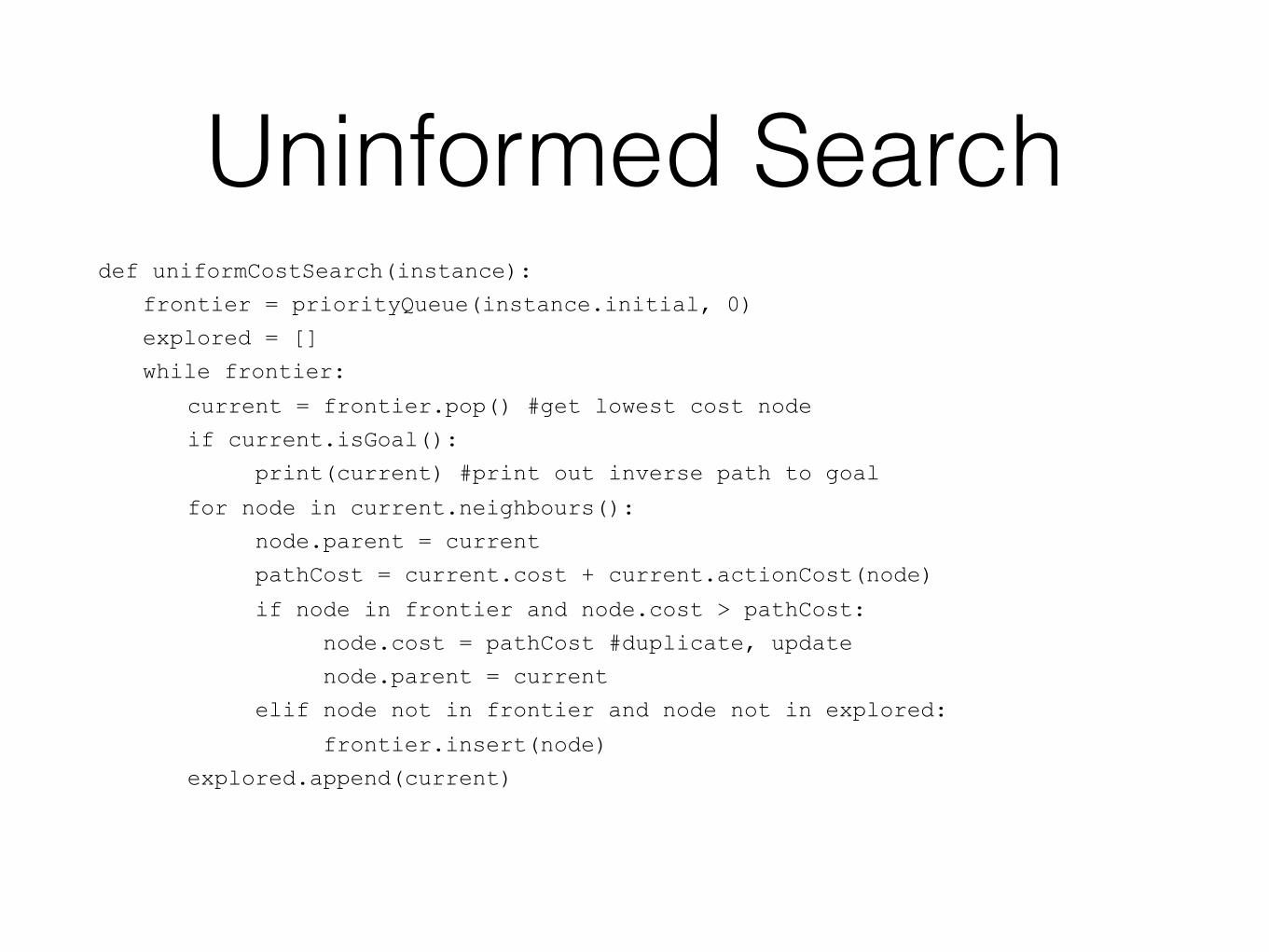
Uninformed Searchdef uniformCostSearch(instance):
frontier = priorityQueue(instance.initial, 0)
explored = []
while frontier:
current = frontier.pop() #get lowest cost node
if current.isGoal():
print(current) #print out inverse path to goal
for node in current.neighbours():
node.parent = current
pathCost = current.cost + current.actionCost(node)
if node in frontier and node.cost > pathCost:
node.cost = pathCost #duplicate, update
node.parent = current
elif node not in frontier and node not in explored:
frontier.insert(node)
explored.append(current)
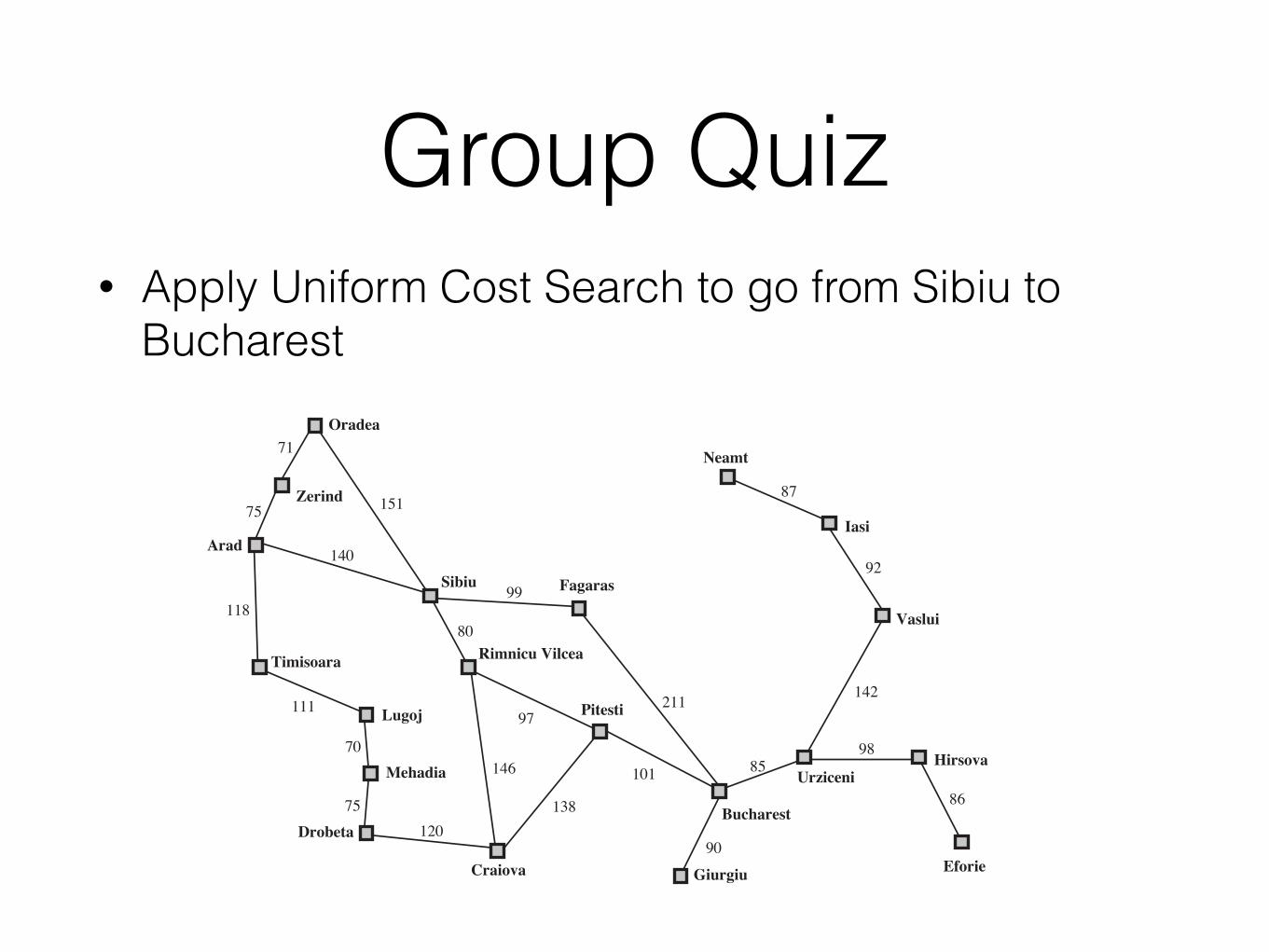
Group Quiz• Apply Uniform Cost Search to go from Sibiu to
Bucharest
Giurgiu
UrziceniHirsova
Eforie
NeamtOradea
Zerind
Arad
Timisoara
Lugoj
Mehadia
Drobeta
Craiova
Sibiu Fagaras
Pitesti
Vaslui
Iasi
Rimnicu Vilcea
Bucharest
71
75
118
111
70
75120
151
140
99
80
97
101
211
138
146 85
90
98
142
92
87
86
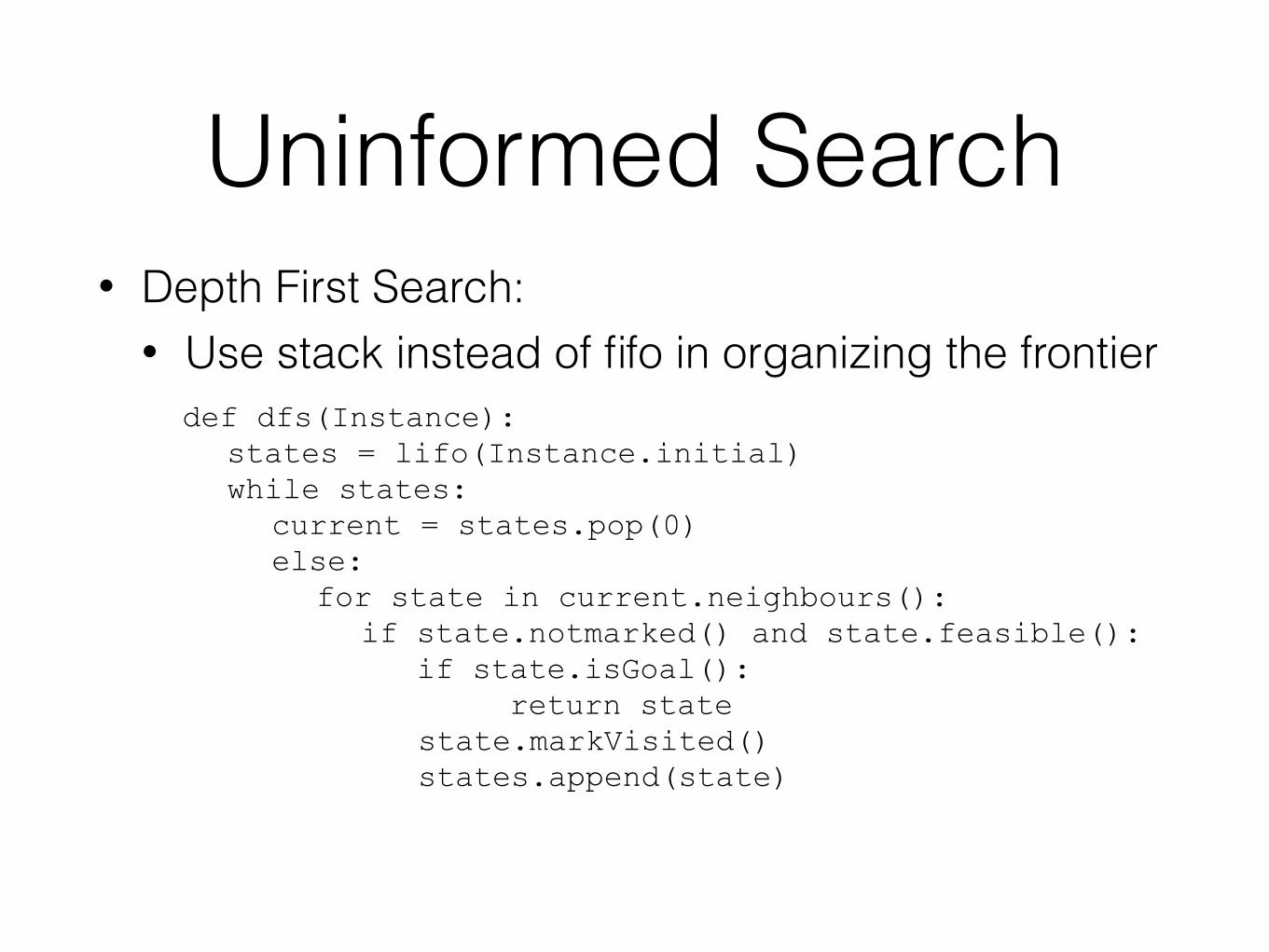
Uninformed Search• Depth First Search:
• Use stack instead of fifo in organizing the frontierdef dfs(Instance):
states = lifo(Instance.initial) while states:
current = states.pop(0) else:
for state in current.neighbours(): if state.notmarked() and state.feasible(): if state.isGoal(): return state state.markVisited() states.append(state)
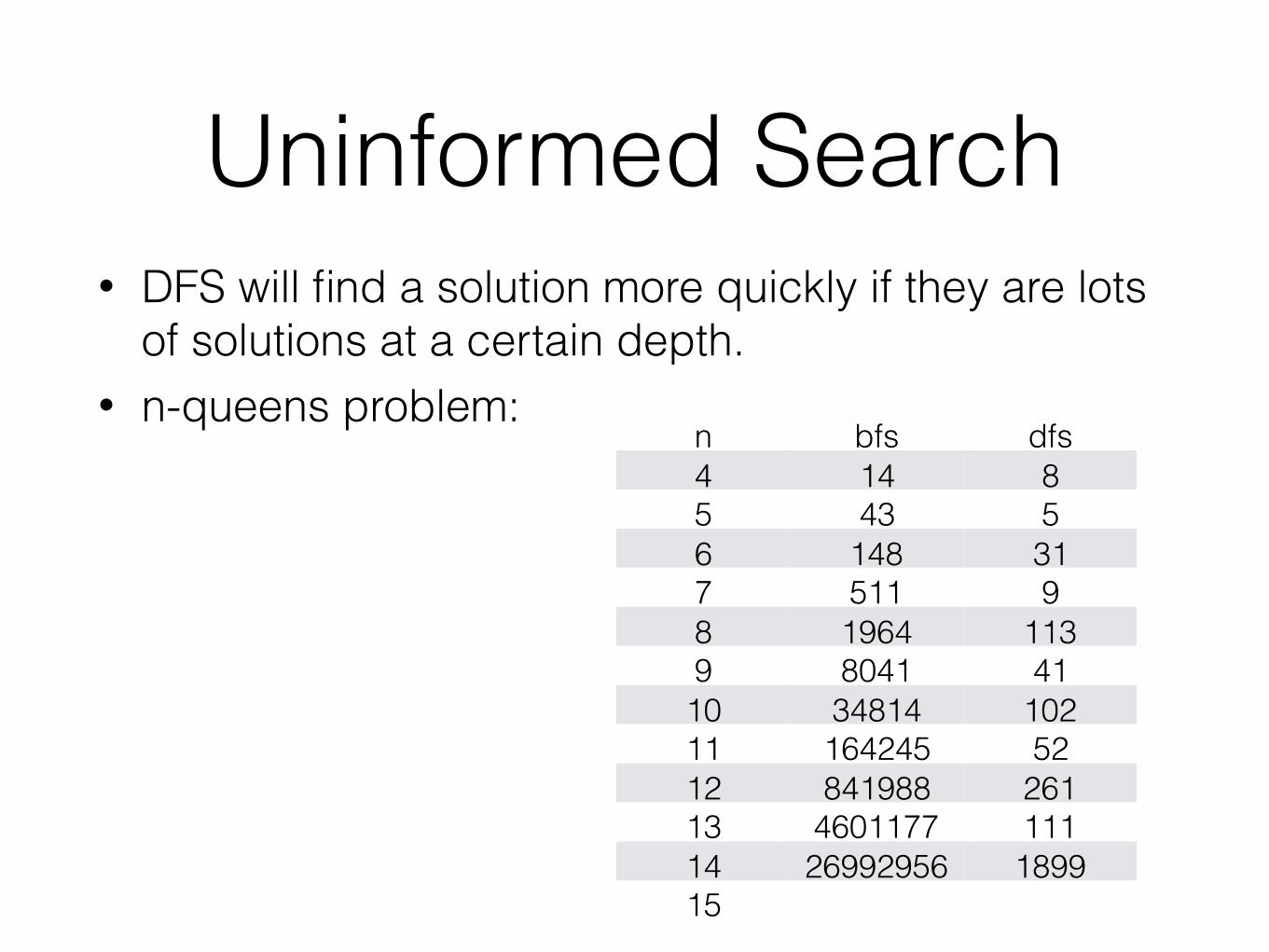
Uninformed Search• DFS will find a solution more quickly if they are lots
of solutions at a certain depth. • n-queens problem:
n bfs dfs4 14 85 43 56 148 317 511 98 1964 1139 8041 4110 34814 10211 164245 5212 841988 26113 4601177 11114 26992956 189915
Uninformed Search
A
C
F G
M N O
A
C
F G
L M N O
A
C
F G
L M N O
C
F G
L M N O
A
B C
E F G
K L M N O
A
C
E F G
J K L M N O
A
C
E F G
J K L M N O
A
B C
D E F G
I J K L M N O
A
B C
D E F G
H I J K L M N O
A
B C
D E F G
H I J K L M N O
A
B C
D E F G
H I J K L M N O
A
B C
D E F G
H I J K L M N O
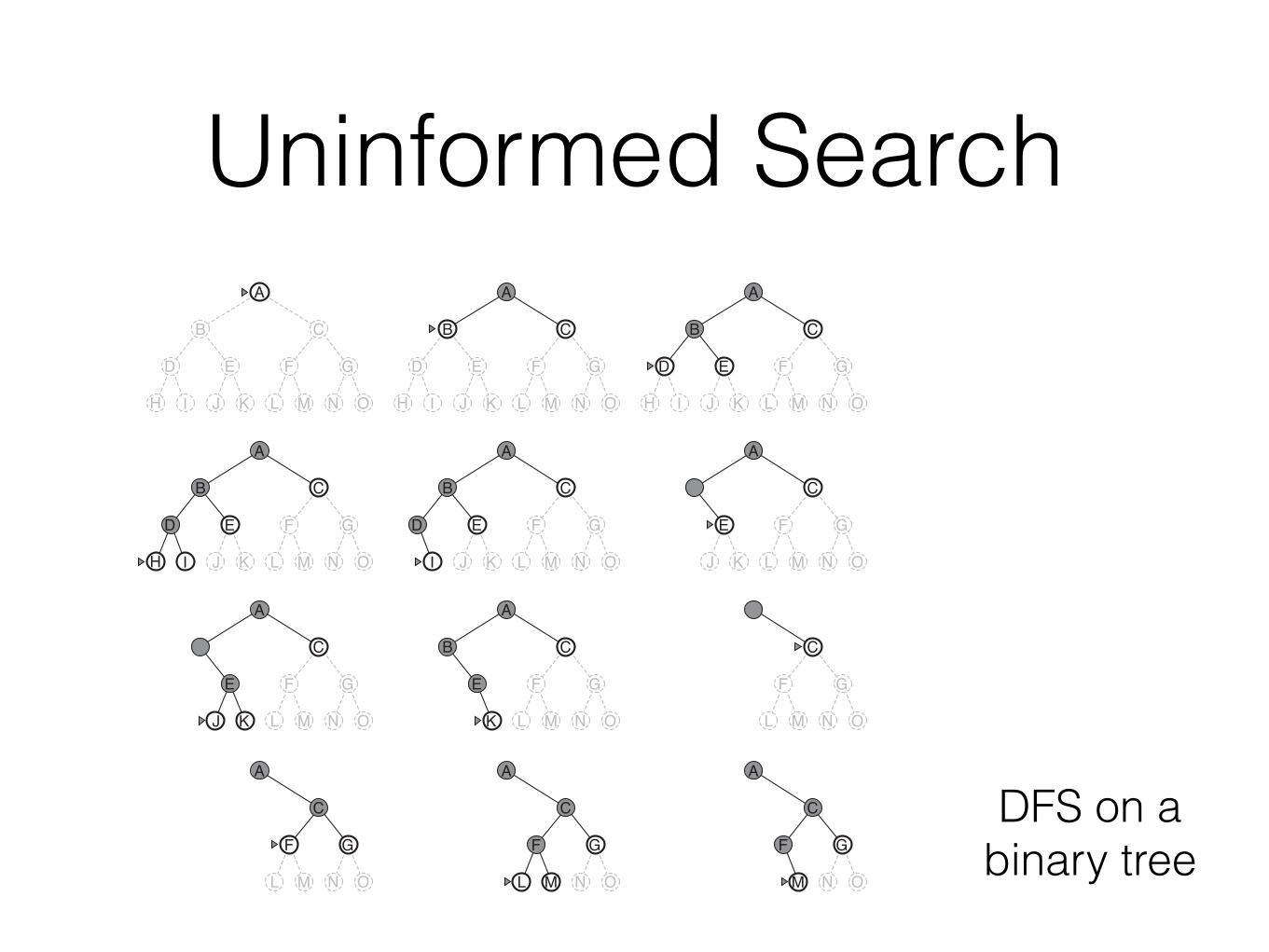
DFS on a binary tree
Uninformed Search• DFS works well if there are goal states at a limited
depth • but horribly if there are not
• Depth limited search • If you don’t find a goal, break off after reaching a
maximum depth of d • How do we determine d?
• Sometimes, the problem can tell us • Iterative deepening depth first search
Uninformed Search• Iterative deepening depth first search
• Do limited depth dfs • Increase limit, if no solution found
• Why is this a good idea? • We recreate parts of the previous search tree • Repeated work is not a big portion of the total
work done
db+ (d� 1)b2 + (d� 2)b3 + . . .+ 2bd�1 + 1bd = O(bd)
Uninformed Search• Bidirectional Search
• Basic idea: • Search from the initial state and from the goal
state • Success if you can connect • Complexity O(bˆd/2)
GoalStart
Informed Searches• Use additional information
• Rumanian road map: • Straight-line distance to goal
• 8-puzzle • Sum of the Manhattan distance of current
location of a piece to goal location of a piece • n-queen problem
• Need to redefine states
Informed Search
• Tree search • Expand nodes without regard whether expanded
nodes have been visited • Graph search
• Expand nodes but disregard explored nodes
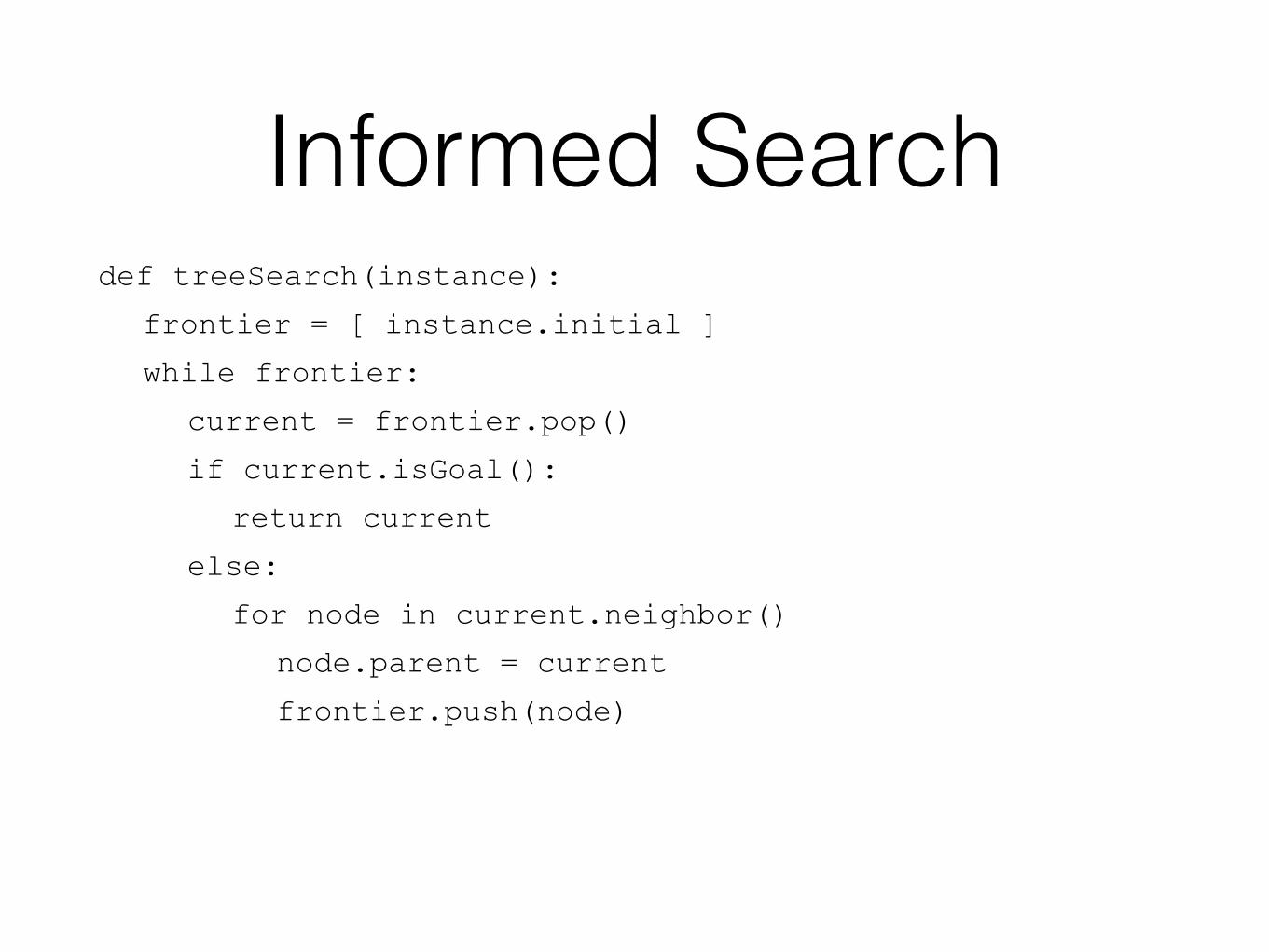
Informed Searchdef treeSearch(instance):
frontier = [ instance.initial ]
while frontier:
current = frontier.pop()
if current.isGoal():
return current
else:
for node in current.neighbor()
node.parent = current
frontier.push(node)
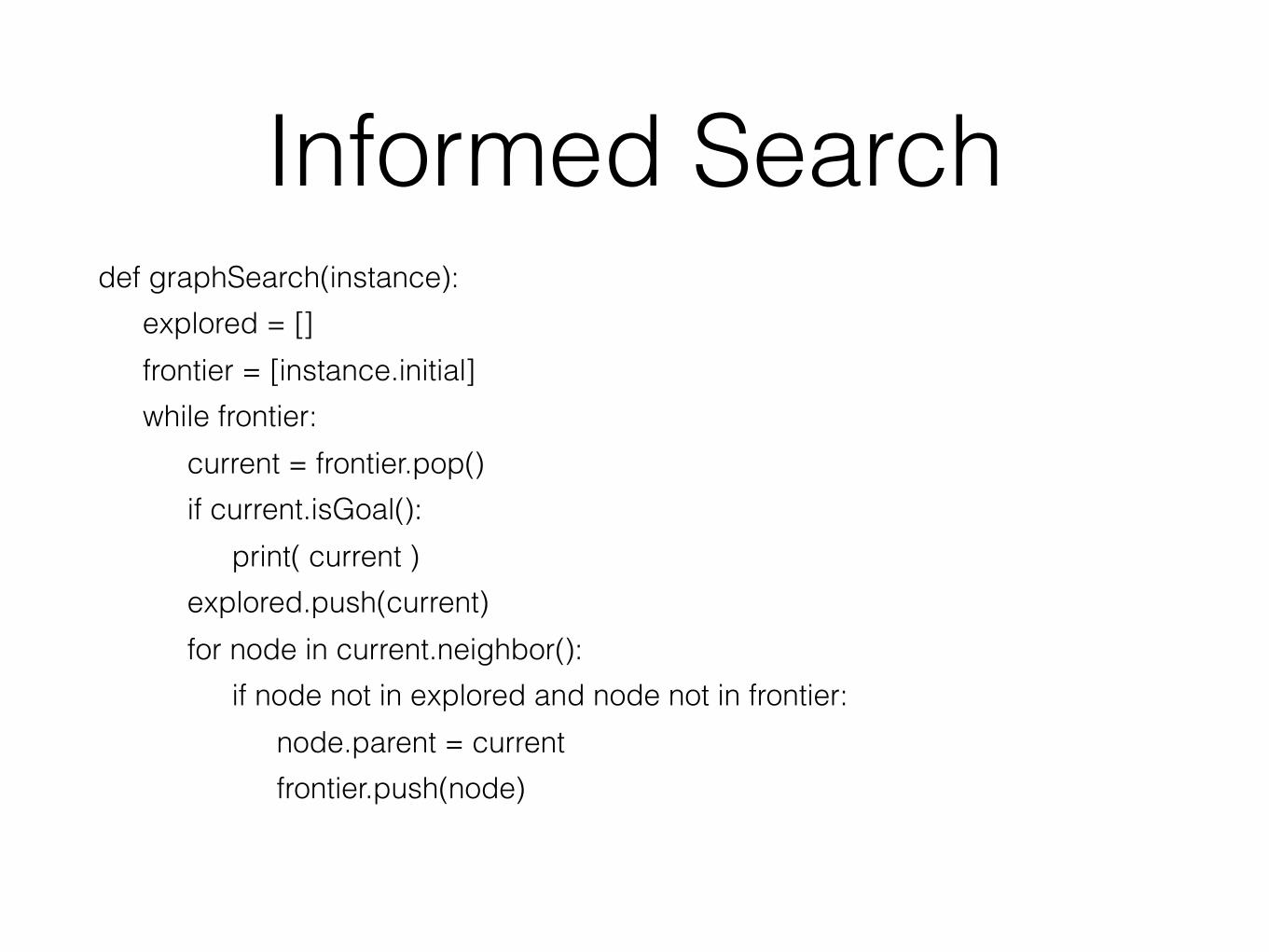
Informed Searchdef graphSearch(instance):
explored = [] frontier = [instance.initial] while frontier:
current = frontier.pop() if current.isGoal():
print( current ) explored.push(current) for node in current.neighbor():
if node not in explored and node not in frontier: node.parent = current frontier.push(node)
Informed Search• Best-first search
• Do graph search • Use a priority queue • Have an evaluation function for each node
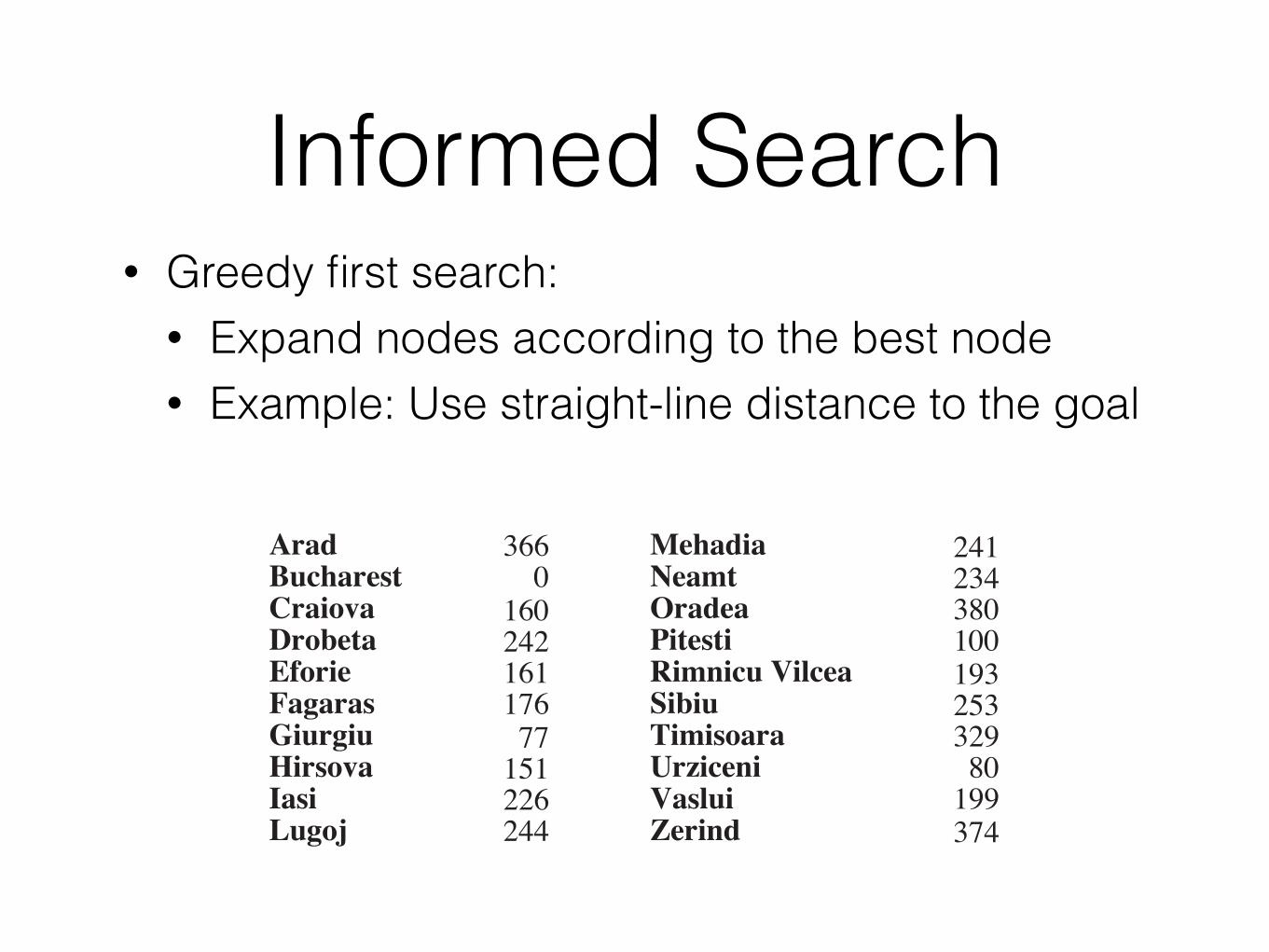
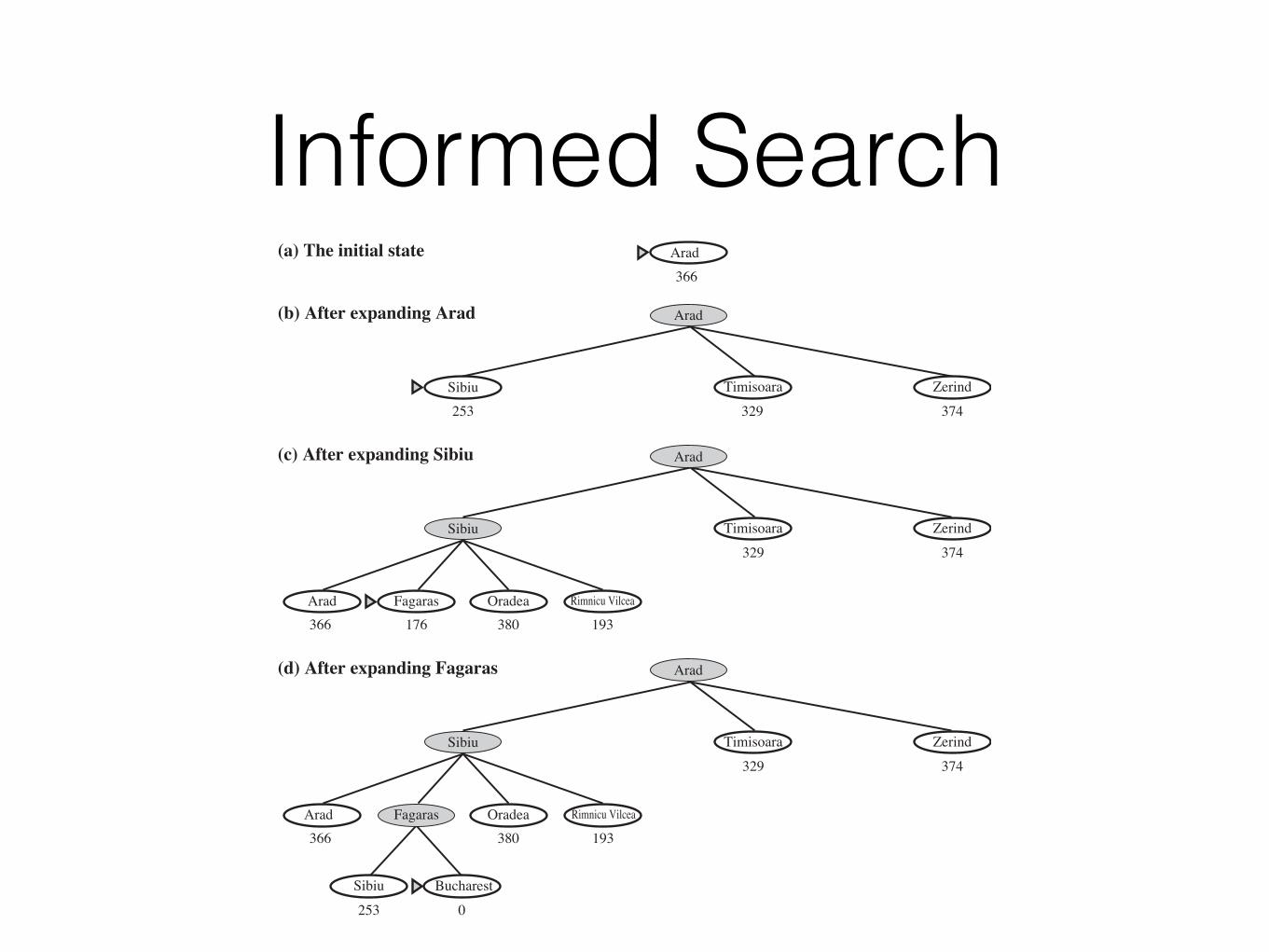
Informed Search• Greedy first search:
• Expand nodes according to the best node • Example: Use straight-line distance to the goal
Urziceni
NeamtOradea
Zerind
Timisoara
Mehadia
SibiuPitestiRimnicu Vilcea
Vaslui
Bucharest
GiurgiuHirsova
Eforie
Arad
Lugoj
DrobetaCraiova
Fagaras
Iasi
016024216177
151
366
244226
176
241
25332980
199
380234
374
100193
Informed Search
Rimnicu Vilcea
Zerind
Arad
Sibiu
Arad Fagaras Oradea
Timisoara
Sibiu Bucharest
329 374
366 380 193
253 0
Rimnicu Vilcea
Arad
Sibiu
Arad Fagaras Oradea
Timisoara329
Zerind374
366 176 380 193
Zerind
Arad
Sibiu Timisoara253 329 374
Arad366
(a) The initial state
(b) After expanding Arad
(c) After expanding Sibiu
(d) After expanding Fagaras
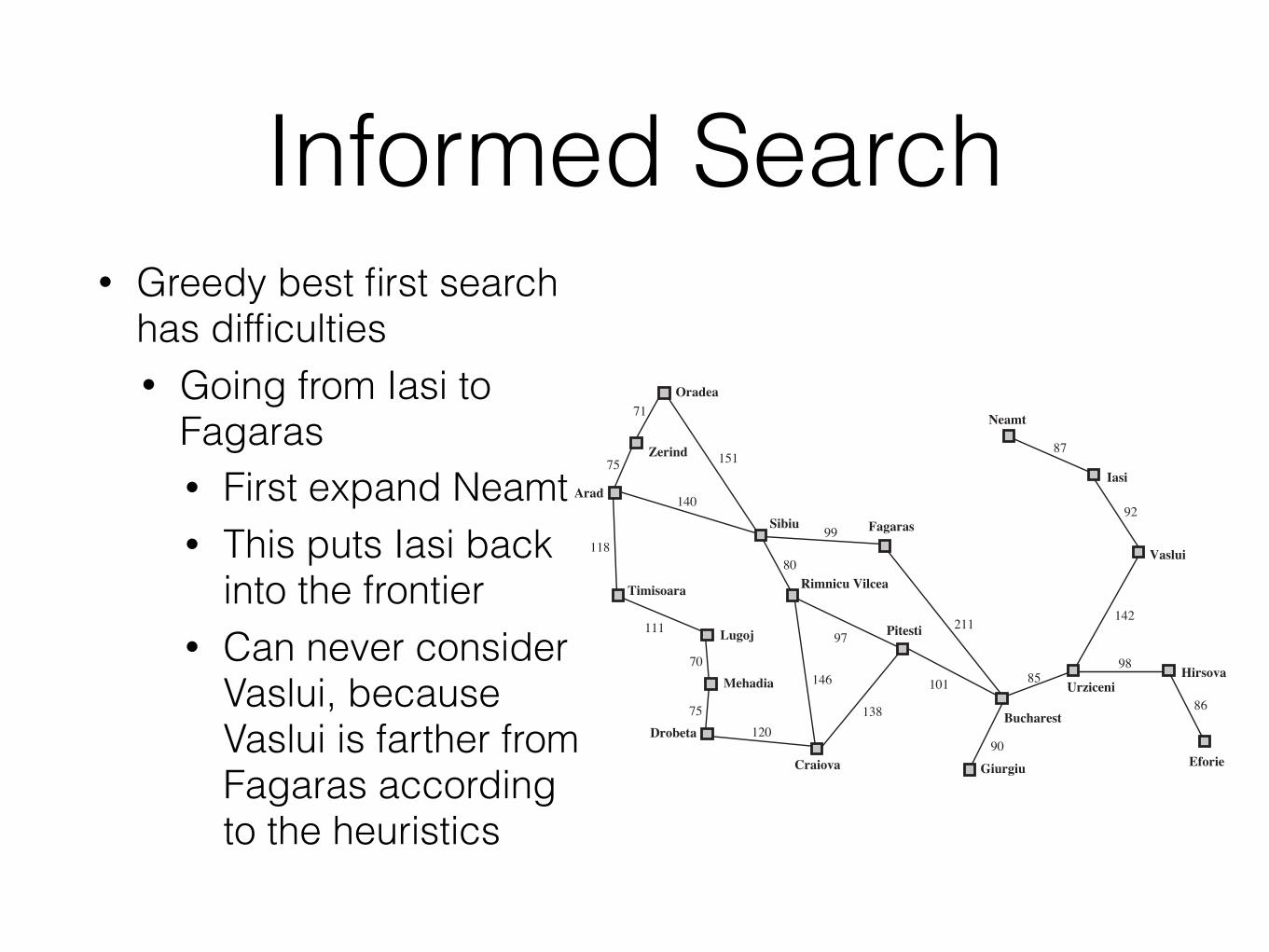
Informed Search• Greedy best first search
has difficulties • Going from Iasi to
Fagaras • First expand Neamt • This puts Iasi back
into the frontier • Can never consider
Vaslui, because Vaslui is farther from Fagaras according to the heuristics
Giurgiu
UrziceniHirsova
Eforie
NeamtOradea
Zerind
Arad
Timisoara
Lugoj
Mehadia
Drobeta
Craiova
Sibiu Fagaras
Pitesti
Vaslui
Iasi
Rimnicu Vilcea
Bucharest
71
75
118
111
70
75120
151
140
99
80
97
101
211
138
146 85
90
98
142
92
87
86
Informed Search• Greedy best-first search
• Combine with graph search algorithm • Do not consider repeated states
• Version is complete for finite trees
Informed Search• A* search
• Evaluation function f for node n: • g(n) cost of getting to node n • h(n) heuristic for getting from node n to goal
f(n) = g(n) + h(n)
Informed Search• A* search
• When will A* be optimal? • Heuristic needs to be admissible
• Never overestimate the costs to reach the goal from the current node
• Heuristic needs to be consistent (when using graph search) • Estimated costs of reaching goal from n is less than or
equal to the costs of going from n to successor n’ plus estimated costs of reaching the goal from n’.
8n, 8n0, n0successor of n h(n) costs(n, n0
) + h(n0)
Informed Search• Tree-version of A* is optimal if heuristic is
admissible • Graph version of A* is optimal if heuristic is
consistent
• Clue: f-costs are nondecreasing on any path generated
• Can "prune" even neighbors of initial node
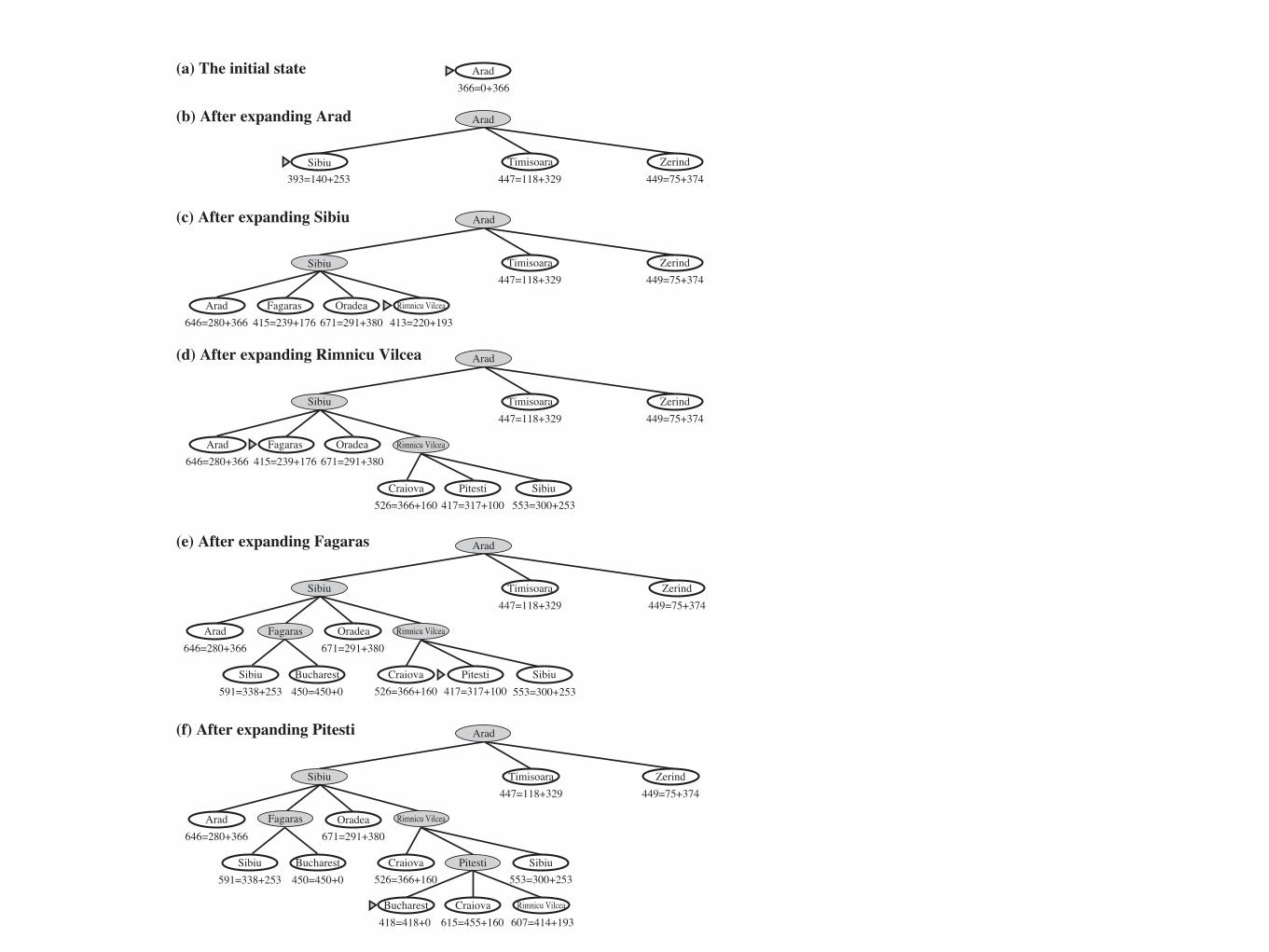
(a) The initial state
(b) After expanding Arad
(c) After expanding Sibiu
Arad
Sibiu Timisoara447=118+329
Zerind449=75+374393=140+253
Arad366=0+366
(d) After expanding Rimnicu Vilcea
(e) After expanding Fagaras
(f) After expanding Pitesti
Zerind
Arad
Sibiu
Arad
Timisoara
Rimnicu VilceaFagaras Oradea
447=118+329 449=75+374
646=280+366 413=220+193415=239+176 671=291+380
Zerind
Arad
Sibiu Timisoara447=118+329 449=75+374
Rimnicu Vilcea
Craiova Pitesti Sibiu526=366+160 553=300+253417=317+100
Zerind
Arad
Sibiu
Arad
Timisoara
Sibiu Bucharest
Fagaras Oradea
Craiova Pitesti Sibiu
447=118+329 449=75+374
646=280+366
591=338+253 450=450+0 526=366+160 553=300+253417=317+100
671=291+380
Zerind
Arad
Sibiu
Arad
Timisoara
Sibiu Bucharest
Oradea
Craiova Pitesti Sibiu
Bucharest Craiova Rimnicu Vilcea418=418+0
447=118+329 449=75+374
646=280+366
591=338+253 450=450+0 526=366+160 553=300+253
615=455+160 607=414+193
671=291+380
Rimnicu Vilcea
Fagaras Rimnicu Vilcea
Arad Fagaras Oradea646=280+366 415=239+176 671=291+380
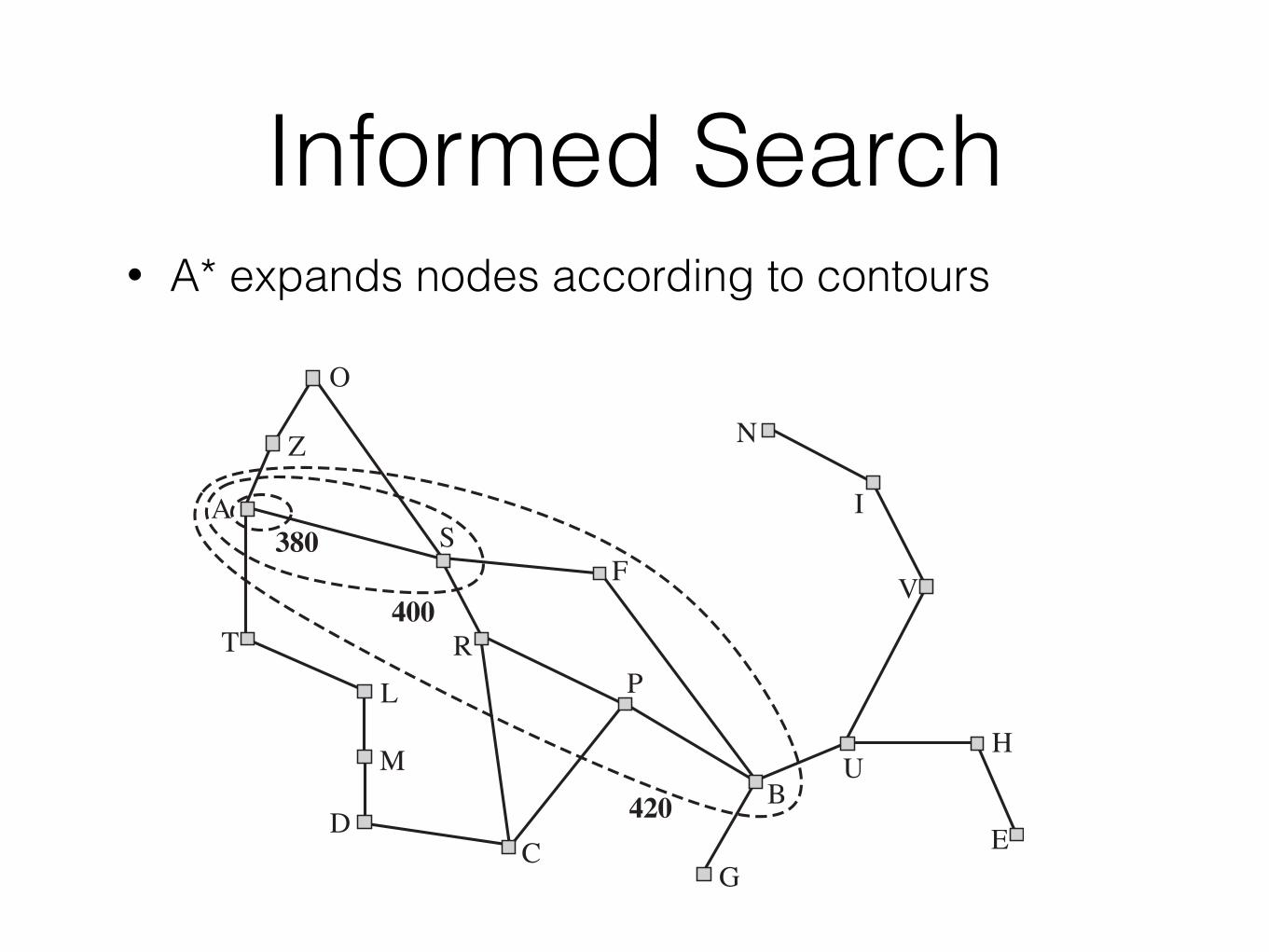
Informed Search• A* expands nodes according to contours
O
ZA
TL
MD
C
R
F
P
G
BU
H
E
V
I
N
380
400
420
S
Informed Search• A* works well
• If there are many sub-optimal paths that are not quite a goal, then A* will explore many unnecessary spaces
Informed Search• A* problems
• A* needs to maintain big arrays • it never throws away a node • runs out of memory before it runs out of user’s
patience
Informed Search• Memory bounded A* variants
• Iterative deepening • Cut-off consideration of nodes with f-value
larger than a certain value • If not successful, adjust cut-off point • Can be difficult if f-values are floats
Informed Search• Recursive best-first search
• Uses only linear space • Uses an f-limit value to keep track of the best
alternative path available
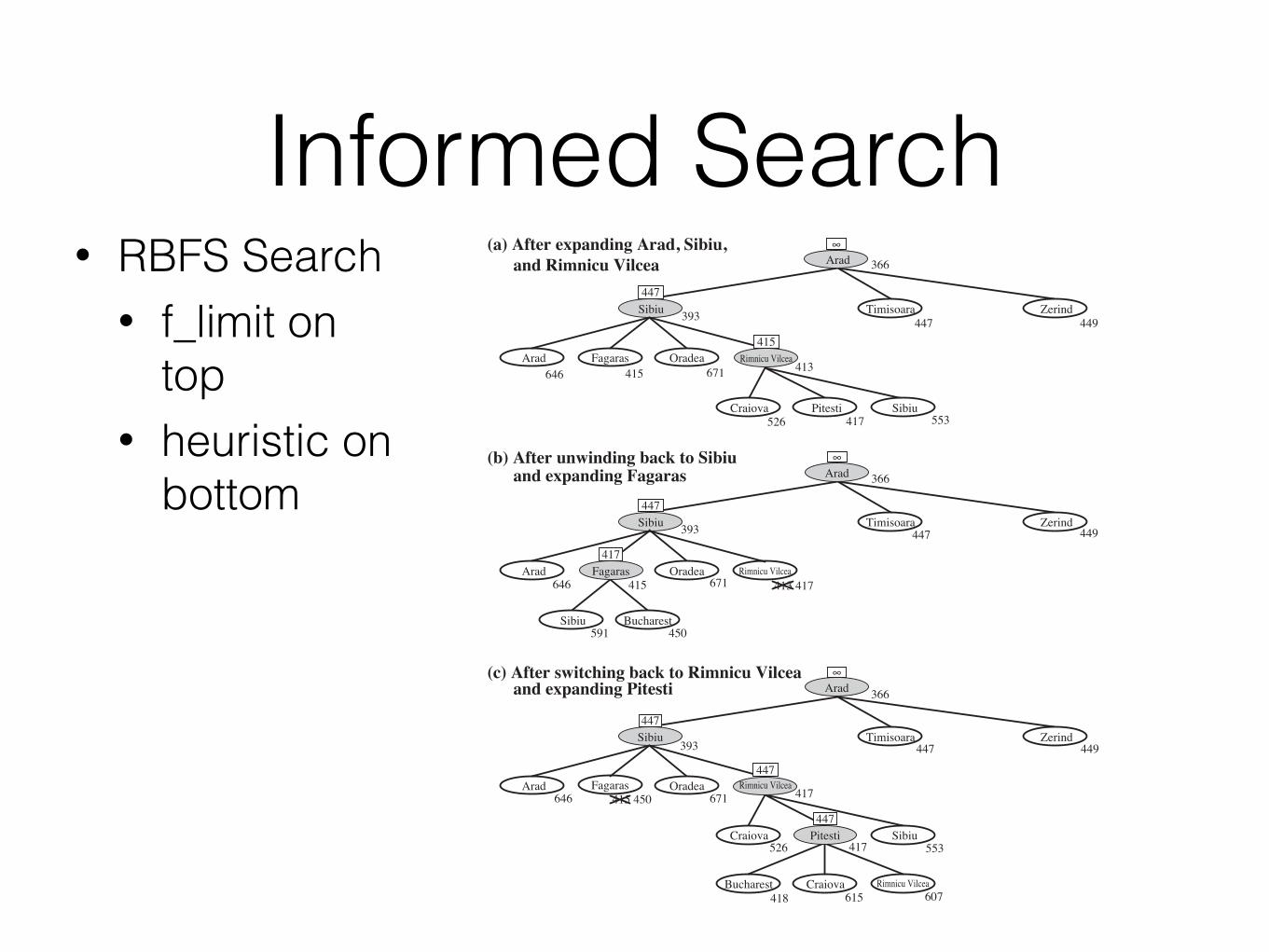
Informed Search• RBFS Search
• f_limit on top
• heuristic on bottom
Zerind
Arad
Sibiu
Arad Fagaras Oradea
Craiova Sibiu
Bucharest Craiova Rimnicu Vilcea
Zerind
Arad
Sibiu
Arad
Sibiu Bucharest
Rimnicu VilceaOradea
Zerind
Arad
Sibiu
Arad
Timisoara
Timisoara
Timisoara
Fagaras Oradea Rimnicu Vilcea
Craiova Pitesti Sibiu
646 415 671
526 553
646 671
450591
646 671
526 553
418 615 607
447 449
447
447 449
449
366
393
366
393
413
413 417415
366
393
415 450 417Rimnicu Vilcea
Fagaras
447
415
447
447
417
(a) After expanding Arad, Sibiu, and Rimnicu Vilcea
(c) After switching back to Rimnicu Vilcea and expanding Pitesti
(b) After unwinding back to Sibiu and expanding Fagaras
447
447
∞
∞
∞
417
417
Pitesti
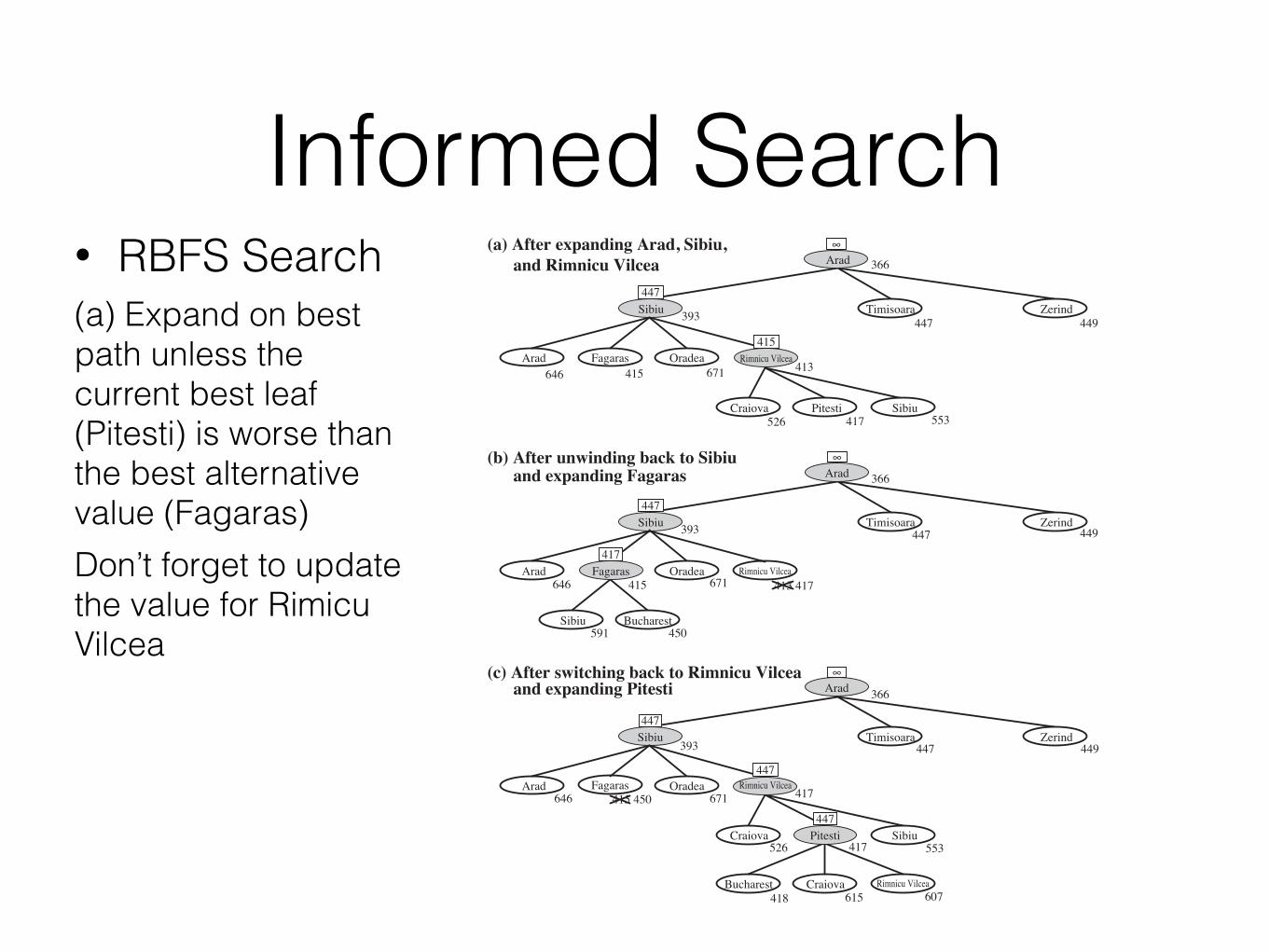
Informed Search• RBFS Search (a) Expand on best path unless the current best leaf (Pitesti) is worse than the best alternative value (Fagaras) Don’t forget to update the value for Rimicu Vilcea
Zerind
Arad
Sibiu
Arad Fagaras Oradea
Craiova Sibiu
Bucharest Craiova Rimnicu Vilcea
Zerind
Arad
Sibiu
Arad
Sibiu Bucharest
Rimnicu VilceaOradea
Zerind
Arad
Sibiu
Arad
Timisoara
Timisoara
Timisoara
Fagaras Oradea Rimnicu Vilcea
Craiova Pitesti Sibiu
646 415 671
526 553
646 671
450591
646 671
526 553
418 615 607
447 449
447
447 449
449
366
393
366
393
413
413 417415
366
393
415 450 417Rimnicu Vilcea
Fagaras
447
415
447
447
417
(a) After expanding Arad, Sibiu, and Rimnicu Vilcea
(c) After switching back to Rimnicu Vilcea and expanding Pitesti
(b) After unwinding back to Sibiu and expanding Fagaras
447
447
∞
∞
∞
417
417
Pitesti
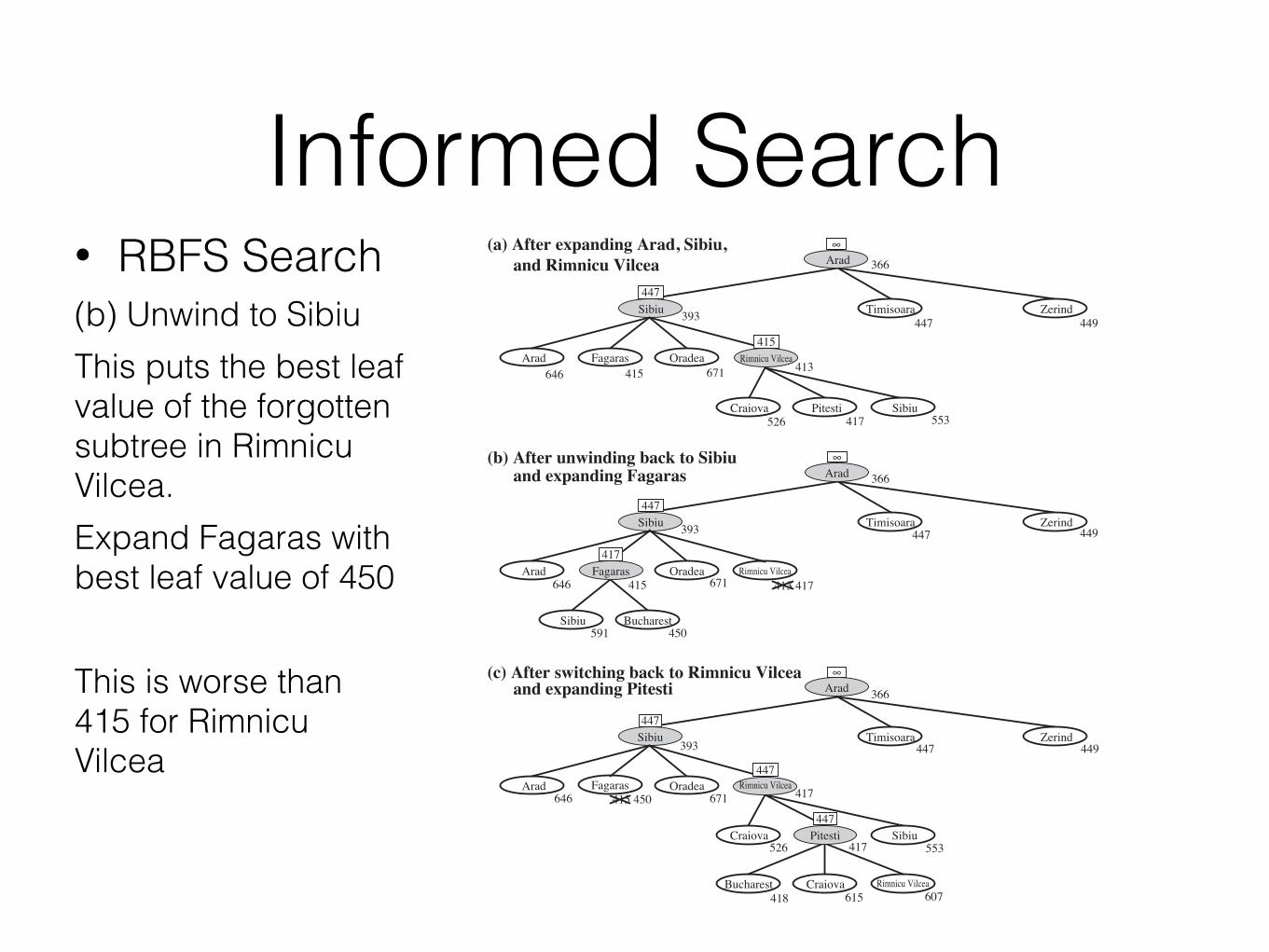
Informed Search• RBFS Search (b) Unwind to Sibiu This puts the best leaf value of the forgotten subtree in Rimnicu Vilcea. Expand Fagaras with best leaf value of 450
This is worse than 415 for Rimnicu Vilcea
Zerind
Arad
Sibiu
Arad Fagaras Oradea
Craiova Sibiu
Bucharest Craiova Rimnicu Vilcea
Zerind
Arad
Sibiu
Arad
Sibiu Bucharest
Rimnicu VilceaOradea
Zerind
Arad
Sibiu
Arad
Timisoara
Timisoara
Timisoara
Fagaras Oradea Rimnicu Vilcea
Craiova Pitesti Sibiu
646 415 671
526 553
646 671
450591
646 671
526 553
418 615 607
447 449
447
447 449
449
366
393
366
393
413
413 417415
366
393
415 450 417Rimnicu Vilcea
Fagaras
447
415
447
447
417
(a) After expanding Arad, Sibiu, and Rimnicu Vilcea
(c) After switching back to Rimnicu Vilcea and expanding Pitesti
(b) After unwinding back to Sibiu and expanding Fagaras
447
447
∞
∞
∞
417
417
Pitesti
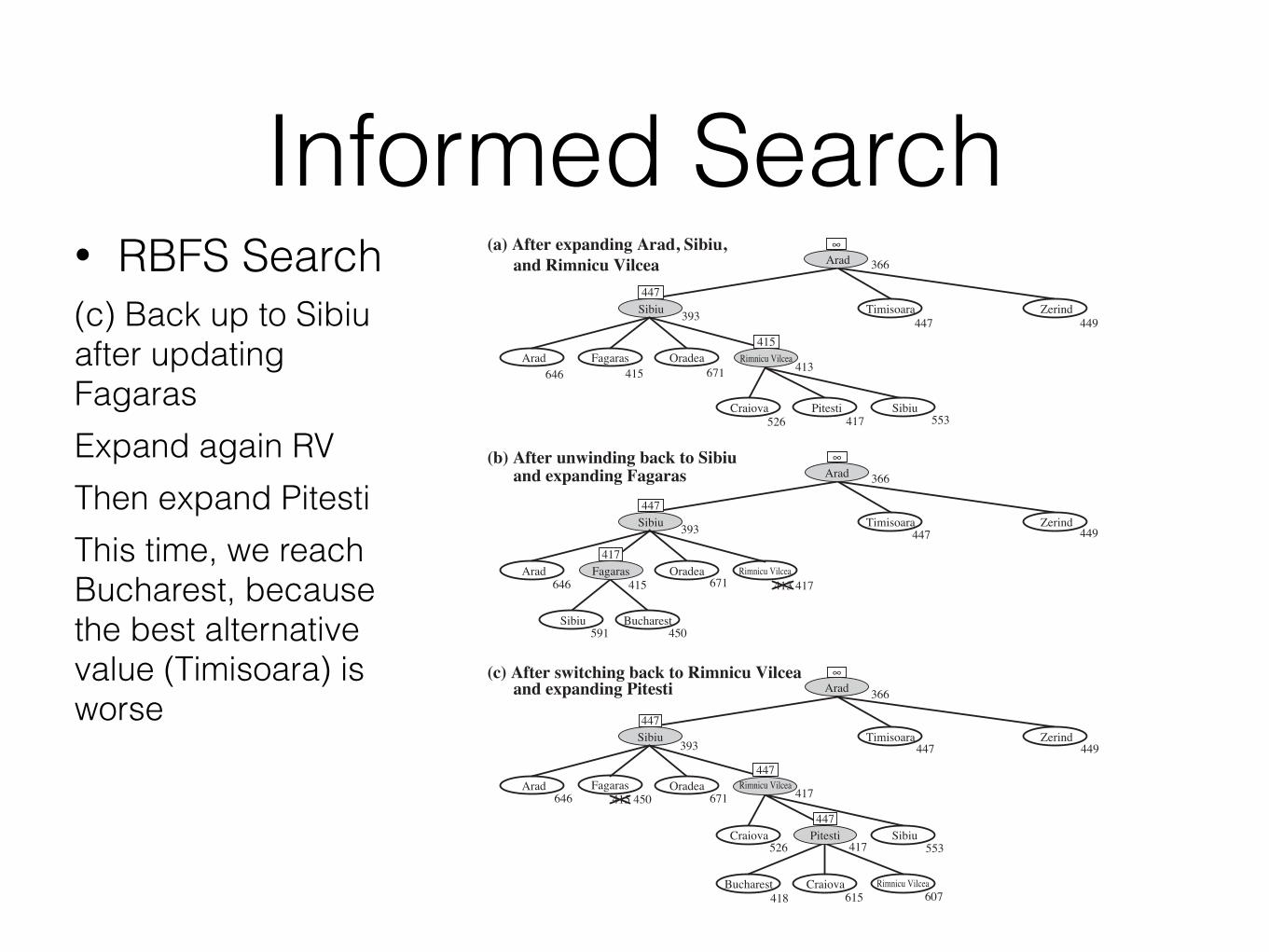
Informed Search• RBFS Search (c) Back up to Sibiu after updating Fagaras Expand again RV Then expand Pitesti This time, we reach Bucharest, because the best alternative value (Timisoara) is worse
Zerind
Arad
Sibiu
Arad Fagaras Oradea
Craiova Sibiu
Bucharest Craiova Rimnicu Vilcea
Zerind
Arad
Sibiu
Arad
Sibiu Bucharest
Rimnicu VilceaOradea
Zerind
Arad
Sibiu
Arad
Timisoara
Timisoara
Timisoara
Fagaras Oradea Rimnicu Vilcea
Craiova Pitesti Sibiu
646 415 671
526 553
646 671
450591
646 671
526 553
418 615 607
447 449
447
447 449
449
366
393
366
393
413
413 417415
366
393
415 450 417Rimnicu Vilcea
Fagaras
447
415
447
447
417
(a) After expanding Arad, Sibiu, and Rimnicu Vilcea
(c) After switching back to Rimnicu Vilcea and expanding Pitesti
(b) After unwinding back to Sibiu and expanding Fagaras
447
447
∞
∞
∞
417
417
Pitesti
Informed Search• RBFS generates less nodes than IDA*
• In a sense, IDA* and RBFS throw away too much memory
Informed Search• Memory bounded A* • Simplified memory bounded A*
Informed Search• Simplified memory bounded A*
• Do A* until algorithm runs out of memory • Need to free a node
• Frees the node with the highest value of f • After backing up the f-value to its parent
• If all the descendants of n are forgotten • SMA* does not know where to go from n • But SMA* knows whether n is worth while
considering
Heuristics• Example 8-puzzle
• Branching factor about 3 • Depth about 22 • Exhaustive tree search gives 3**22 ~3*10**10
moves • Graph search has 9!/2 possible states
• Example 15-puzzle • Graph search has 16!/2 = 10,461,394,944,000
states
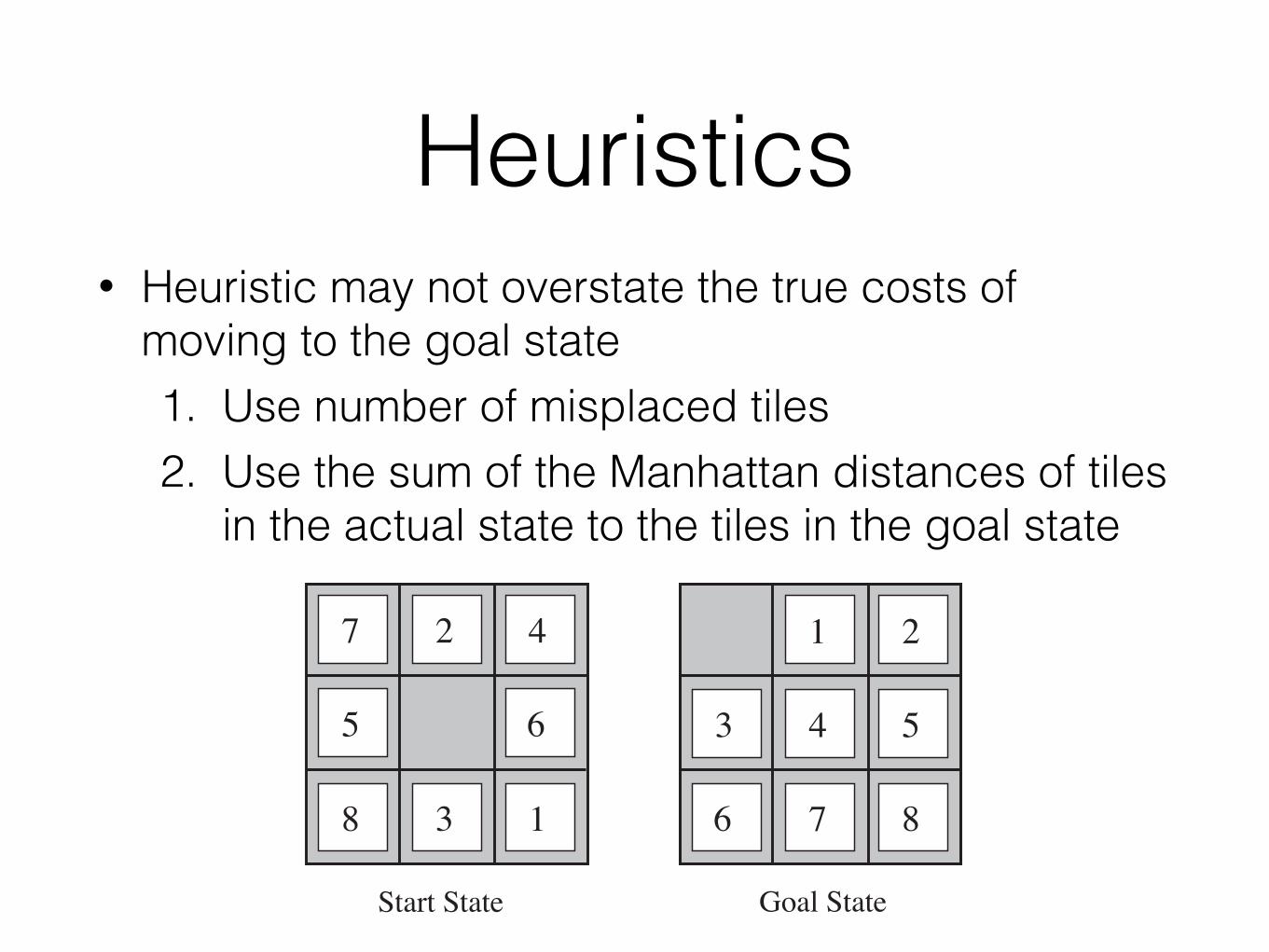
Heuristics • Heuristic may not overstate the true costs of
moving to the goal state 1. Use number of misplaced tiles 2. Use the sum of the Manhattan distances of tiles
in the actual state to the tiles in the goal state
2
Start State Goal State
1
3 4
6 7
5
1
2
3
4
6
7
8
5
8
Heuristics • 8-puzzle
• Second choice works better
Heuristics • Relaxed search problems
• Instead of humans inventing heuristics • Computer could generate heuristics by relaxing the rules of
the game • 8 puzzle:
• Allow tiles move to any position • Second heuristic gives the costs to move to the goal in the
relaxed version • Automatic generation of heuristics
• Formulate the rules of the game • Then relax automatically the rules • Try out heuristics
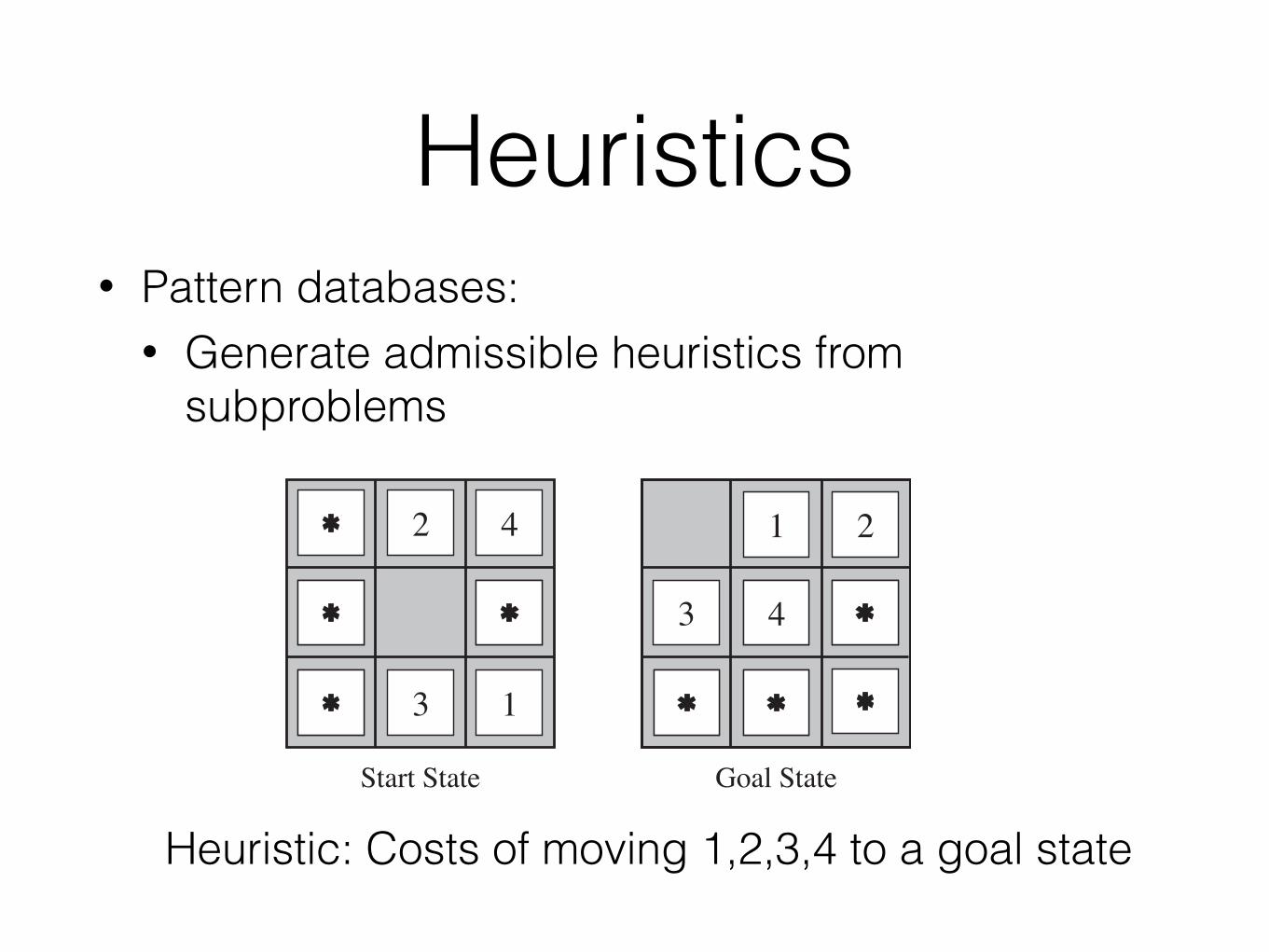
Heuristics • Pattern databases:
• Generate admissible heuristics from subproblems
Start State Goal State
1
2
3
4
6
8
5
21
3 6
7 8
54
Heuristic: Costs of moving 1,2,3,4 to a goal state

Heuristics • Pattern databases:
• Use various heuristics • 1,2,3,4 • 5,6,7,8
• Pattern database stores the exact solution for a number of subproblems
• Disjoint pattern database • Solve 1, 2, 3, 4 subproblem only counting the moves of
tiles 1, 2, 3, or 4 • Solve 5, 6, 7, 8 subproblem only contain the moves of tiles
5, 6, 7, or 8 • Heuristic is the sum of both values