SISTEME DE ACTIONARE

of 16
Transcript of SISTEME DE ACTIONARE
PROIECTSISTEME DE ACTIONARE ELECTRICA
Sisteme de actionare electrica -PROIECT-
INTRODUCERE Acionrile electrice (AE) ale mecanismelor i mainilor de lucru (ML) industriale moderne se caracterizeaz prin anumite particulariti. n primul rnd, ele sunt relativ complexe (complicate), deoarece includ mai multe elemente componente: - identice sau de natur diferit (mecanice, electromecanice, electrice, electronice); - de aceeai putere sau de puteri diferite; - att n partea de for (motoare, reductoare, organe de lucru), ct i n partea de comand (traductoare, dispozitive de comand, reglare, protecie, semnalizare); - unele elemente sunt interdependente unele de altele (la strunguri puterea de achiere a metalelor, pentru arborele principal depinde de adncimea cuitului de tiere sau frezare i de viteza mecanismelor de avans), sau sunt legate printr-un parametru tehnologic la funcionarea n paralel (presiunea de ieire a unei pompe acioneaz asupra unei alte pompe, conectate la aceeai reea). n al doilea rnd, majoritatea mainilor de lucru sau a instalaiilor industriale sunt automatizate cu ajutorul unui sistem de automatizare (SA), chiar dac viteza motorului sau motoarelor nu este reglabil. n al treilea rnd, automatizarea complex a multor instalaii industriale nu poate fi fcut fr acionri electrice reglabile (cu vitez lin-variabil), la fel ca i stabilizarea unor parametri tehnologici n procesul de variaie a perturbaiilor. n legtur cu toate acestea acionrile electrice ale multor maini i instalaii industriale reprezint un sistem de acionare electric (SAE) sau un sistem de mai multe acionri electrice cu funcionare n grup, automatizate n conformitate cu cerinele unui proces tehnologic.
2
Sisteme de actionare electrica -PROIECT-
CUPRINS
1. Datele initiale si tema proiectului; 2. Alegerea masini electrice; 3. Alegerea convertizorului de frecventa;4. Alcatuirea schemei electrice de comanda,protectie si semnalizare;
5. Alegerea automatului programabil; 6. Programarea apelului; 7. Realizarea specificatiei de aparataj.
3
Sisteme de actionare electrica -PROIECT-
1. Datele initiale si tema proiectului 1.1a.Calculul actionari unui brat de robot care realizeaza miscarea de ridicare coborare a unui sarcini mecanice.
Q=(30-0,2n)*10 [daN] -sarcina nominala Q0=(0,2-n0.01) *10 [daN] -greutatea mecanica de prindere v=(10+0,2n) [m/min] -viteza de ridicare H=10 [m] -inaltimea maxima Dt=0,25 [m] -diametrul tamburului b)Schema cinematica a sistemului de actionare
1.1b.Adoptarea numarului de turati pentru masina electrica 3000 rpm (p=1) 1500 rpm (p=2) 1000 rpm (p=3) 750 rpm (p=4) 1.1c.Calculul vitezei unchiulare a tamburului v=Rt*t =>t = v = 1.704 Rt
n0
m/s
1.1d.Determinarea raportului de transmisie reducto cu o singura treapta - i=30-40 reducto cu doua trepte - i=40-60 reducto cu cu trei trepte - i=60-90i= motor = 92 .16 0
=>3 trepte (m-=3)
motor =
2n0 1500 = = 157 60 30
4
Sisteme de actionare electrica -PROIECT-
1.1e.Calculul randamentului reductorului = 0.94 r = 0.98 m => m-nr. de trepte Din datele prealabile obtinem: Q=27.2 KdaNQ0 = 0.06
KdaN
v=0.213 Dt=0.25 H=10 Rt=0.125
m/s m m m/s
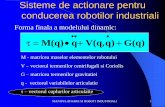
1.2.
Calculul cuplului mediu patrat
Pentru mecanismul de ridicare-coborare calculul cuplului mediu patrat se face pe baza unei diagrame standard de cuplu.
M1 -cuplu de functionare in sarcina la ridicare (regim de motor) M2 -cuplu de functionare in sarcina la coborare(regim de frana) M3 -cuplu de functionare in sarcina la ridicare M4 -cuplu de functionare in sarcina la coborare -t1, t2, t3, t4,-timpii corespunzatori unei ciclu de functionare. Tc- timpul corespunzator unui ciclu de functionare. 1.2a. Calculul celor patru momente se face conform relatiilor: a)t .rid = rid *tambur
M1 =
( Q + Q0 ) Rti * t .rid
; tambur=>
= 0.98 * 0.96
=>
t .rid = 0.921
34075 = 401.58 84.851731 =>
b)t .cob = 2 t .ridt .cob = 0.9142
5
Sisteme de actionare electrica -PROIECT-
M2 =
( Q + Q0 ) Rti
* t .cob.2 = >
c) t .3 = 0.2 0.4 Q * Rt 75 M3 = 0 => = 2.7135 i * t .3 27.639 Q * Rt M 4 = (1 t .3 ) * M 3 0 = 1.085 d) i 1.2b. Calculul cuplului mediuM 2 mec = 1 Tc4
34075 * 0.9142 = 338 92.13
MK =1
2 K k
t = 21554 .773
M mec = 146 .815
1.2c. Calculul timpilor de functionare si de pauza -t1= t2=t3=t4=tk -tcoborare=turcare=0.5 H=v* tk => tk=46,94 1.2d. Calculul duratei de actionare -timpul care se lucreaza intr-o perioadaDA[ 0 0 ] = 4t k = 0.313 Tc
/
[ D A0 0 ] = 2 5
1.2e. Calculul puteri echivalente Pe 0 = M e * motor = 23050 W ] .[DA
[ 0]
1.2f. Calculul puteii echivalente in functie de DA standardPeDA . st = Pe [ 0 ] * DA 0 DAcalculat = 2.5535 .[ KW ] DAstd
6
Sisteme de actionare electrica -PROIECT-
2. Alegerea masinii electrice ABB Model: M3BP (200 MLB) -LV IP 55-IC 411-insulation class F -temperatur risc class B
Greutate: 275 kg Pn=30 KW Speed= 1475 rot/min =93,1% cos=0,84 In=58 Zgomot: Lp=63 dB(A)J= 1 GD 2 = 0,34 4
[Kb*m]
7
Sisteme de actionare electrica -PROIECT-
Verificarea motorului:
Ma1 -cuplu dinamic de accelerare la functionarea in sarcina pentru ridicare Mf1 -cuplu de franare pentru regimul dinamic de ridicare Ma2 -cuplu de functionare in sarcina la coborare Mf2 -cuplu de franare pentru regimul dinamic de ridicare Ma3 -cuplu de functionare in sarcina la ridicare Mf3 -cuplu de franare pentru regimul dinamic de ridicare Ma4 -cuplu de functionare in sarcina la coborare Mf4 -cuplu de franare pentru regimul dinamic de ridicare -t1, t2, t3, t4,-timpii corespunzatori unei ciclu de functionare. -ta, tf=0,5s Calculul cuplului echivalent patratic pentru verificarea motoruluiM 2 ech =4 4 1 4 2 2 M K t k + M aK t ak + M 2 t fk =367,86 fK Tc K =1 K =1 K =1
Pe = M e * motor = 28754 .[W ]
1.Calculul cuplului de accelerare si franare la functionarea in sarcina si in gol: a) calculul momentelor de inertie: J tsarcina = J motor + J raportat =1.07J motor = GD 2 4+J m
=0,34 =0.73 =0,68 =0,05 Kg/m
J rap = J transmisie
J transisie = (1,5 2) J motor
Jm =
Q + Q0 v2 * 2 g motor
8
Sisteme de actionare electrica -PROIECT-
b) calculul momentelor dinamice:M dsarcina = J tsarcinaM a1 = M dsarcina + M 1 M a 2 = M dsarcina + M 2
motor t a (t f )
=336M f 1 = M 1 M dsarcina M f 2 = M 2 M dsarcina
=737,58 =764
=65,58 =2
3. Calculul momentelor la functionarea in gol a) calculul momentelor de inertieJ tsarcina = J motor + J raportat
J motor =
GD 2 4
J transisie = (1,5 2) J motorJ tgol
Jm =
Q v2 * 2 g motor
=1,07motor t a (t f )
b) calculul cuplului pentru functionarea in golM dgol = J tot gol +
=1451,28 =338,7 =337 =-333,2 =-334,91
M a 3 = M 3 + M d . gol M 4 = M 4 + M d . gol Mf3
= M 3 M d . gol
M f 4 = M 4 M d . gol
9
Sisteme de actionare electrica -PROIECT-
Alegerea convertizorului
10
Sisteme de actionare electrica -PROIECT-
Programarea convertizorului: Convertizorul Altivar 21 este configurat11
Sisteme de actionare electrica -PROIECT-
pentru o pornire simplificata fara o interventie ulterioara al unui alt dispozitiv.
4.Schema de comanda, protectie si control.
5.Alegerea automatului programabil:
12
Sisteme de actionare electrica -PROIECT-
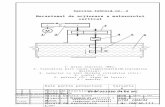
1.Sursa de alimentare 2.Intrarea 3.Iesirea 4.Sloturi pentru module 5.Panoul de control 6.Display Particulaitati:
7.Indicator de Pornit/Oprit 8.Interfata de extindere 9.Cleme 10.Soclu 11.Grila
-intrare digitala I1-I4; -intrare analogical AI1-AI8; -iesire digitala Q1-Q16; -iesire analogical AQ1-AQ2; -4 taste de comanda; -interfata de comunicare.
Alimentarea:(24V)13
Sisteme de actionare electrica -PROIECT-
-tensiune continua
-tensiune alternative.
Modul de extindere:
14
Sisteme de actionare electrica -PROIECT-
15
Sisteme de actionare electrica -PROIECT-
16