S5.Oscilatii

of 12
-
Upload
krzycirrus -
Category
Documents
-
view
215 -
download
0
Transcript of S5.Oscilatii
-
7/27/2019 S5.Oscilatii
1/12
CRISTINA ZARIOIU
FIZIC
GHID DE SEMINAR
OSCILAII MECANICE
V
PITETI
2013
-
7/27/2019 S5.Oscilatii
2/12
2
Problema V.1
Un mobil este constrns s efectueze simultan dou micri oscila-torii armonice dupdoudirecii perpendiculare. Astfel, dac
a.) tsinax = i t2cosay = , cu a = const.;
b.) tsinax = i t2sinay = , cu a = const.;
c.)
+
=
2t
6sin3x i
= t
6sin2y ;
d.) tcosAx = i t2cosBy = , cu A, B = const.;
e.) tcosAx = i
+= 2t2cosBy , cu A, B = const.,
sse gseascexpresia traiectoriei mobilului.R:
Expresia analitica traiectoriei unui mobil se obine prin eliminareatimpului din ecuaiile parametrice, n cazurile date, pentru axele Ox i Oy,
)t(xx= i )t(yy= , iar micarea mobilului n planul xOy va fi caracteri-
zatde o funcie 0)y,x(f = .
a.) Dac tsinax = , t2cosay = , cu a = const., vom scrie
tsinax = i tsintcost2cos
ay 22 == . (1) (2)
Din prima relaie, prin ridicare la ptrat, avem
2
22
a
xtsin = , (3)
dar conform formulei fundamentale a trigonometriei, 1tcostsin 22 =+ ,
2
222
a
x1tsin1tcos == (4)
i astfel, nlocuind relaiile (3) i (4) n (2), rezultc traiectoria mobiluluin acest caz este o parabol, de ecuaie
2
2
a
x21
a
y= sau
=
2
2
a
x21ay . (5)
b.) Cnd tsinax = i t2sinay = , a fiind o constant, procedmanalog i avem
tsina
x= i tcostsin2t2sin
a
y== , (6) (7)
din care, cum
-
7/27/2019 S5.Oscilatii
3/12
3
2
22
a
x1tsin1tcos == , (8)
aflm expresia traiectoriei mobilului n planul xOy:
2
2
a
x1x2y = sau
=
2
222
a
x1x4y . (9)
c.) Dac
+
=
2t
6sin3x ,
= t
6sin2y , scriem
+
=
2t
6sin
3
x i
= t
6sin
2
y. (10) (11)
Utiliznd formula trigonometric de reducere la un unghi ascuit,
=
+ cos
2sin , relaia (10) devine
=
+
= t
6cos
2t
6sin
3
x. (12)
Ridicm la ptrat relaiile (11) i (12)
= t
6cos
9
x 22
i
= t
6sin
4
y 22
, (13) (14)
iar aplicnd formula fundamentala trigonometriei obinem
14
y
9
x 22=+ , (15)
traiectoria mobilului n planul xOyeste o elipsnscrisntr-un drept-unghi cu laturile:
6a23a =
= i 4b2 2b == .
d.) Pentru tcosAx = , t2cosBy = , cu A i B constante, proce-dnd analog, vom avea
tcosA
x= i tsintcost2cos
B
y 22 == . (16) (17)
Ridicnd la ptrat relaia (16)scriem
2
22
A
xtcos = , (18)
dar potrivit formulei fundamentale a
33 0
y2
x
2
AA 0
y
B
x
B
-
7/27/2019 S5.Oscilatii
4/12
4
trigonometriei 1tcostsin 22 =+ scriem:
2
222
A
x
1tcos1tsin == , (19)rezultat pe care l nlocuim n relaia (17),
1A
x2
A
x1
A
x
B
y2
2
2
2
2
2=
= , (20)
i obinem ctraiectoria mobilului este o parabol, de ecuaie:
= 1
A
x2By
2
2. (21)
e.) Dac tcosAx = i
+= 2
t2cosBy , cu A i B constante,
vom scrie
tcosA
x= i
+=
2t2cos
B
y. (22) (23)
Utiliznd formula trigonometric de reducere la un unghi ascuit,
=
+ sin
2cos , cea de-a doua relaie devine
tcostsin2t2sin2t2cosBy == += . (24)
Ridicnd la ptrat relaia (22)
tcosA
x 22
2= (25)
i totodat, conform formulei funda-mentale a trigonometriei, gsim
== tcos1tsin 22
2
2
A
x1= , (26)
din care rezult
2
2
A
x1tsin = . (27)
Prin nlocuirea relaiilor (22) i (27) n (24), obinem ecuaia traiecto-riei descrise de mobil n planul xOy:
2
2
A
x1
A
x2
B
y= sau
2
2
A
x1x
A
B2y = . (28)
AA 0
y
B
x
B
-
7/27/2019 S5.Oscilatii
5/12
5
Problema V.2
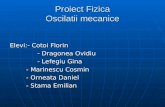
Sse calculeze perioada de oscilaie a unui sistem format din doucorpuri cu masele 1m i 2m , legate ntre ele printr-un resort de masnegli-
jabili constantde elasticitate k, sistemul oscilnd liber, frfrecare, pe osuprafaorizontal.R:
Ecuaia de micarea sistemului se obine uti-liznd metoda separrii(sau izolrii) corpurilor,potrivit creia se va rea-liza o a doua reprezentare
n care prezena resor-tului va fi nlocuit cuforele care acioneazasupra fiecruia din celedoucorpuri.
Notnd cu 1x i 2x deplasrile corpurilor cu masele 1m i 2m fa
de poziiile de echilibru cnd sistemul oscileaz n lungul axei Ox, vomscrie pentru fiecare corp, separat, ecuaia fundamentala dinamicii:
1211 FFxm =&& (1)2122 FFxm =&& , (2)
unde 1F , respectiv 2F reprezintforele cu care un corp acioneazasupra
celuilalt datoritprezenei resortului, iar 1x&& i 2x&& acceleraiile corpurilor.
Cu
11 kxF = i 22 kxF = ,
relaiile (1) i (2) devin)xx(kkxkxxm 121211 ==&& (3)
)xx(kkxkxxm 122122 ==&& (4)sau
0)xx(kxm 1211 =&& (5)
0)xx(kxm 1222 =+&& . (6)
nmulind relaia (5) cu 2m , iar relaia (6) cu 1m , avem
0)xx(mkxmm 122121 =&& (7)
0)xx(mkxmm 121221 =+&& . (8)
Efectum diferena relaiilor (7) i (8) i obinem
0)xx)(mm(k)xx(mm 12211221 =++ &&&& , (9)
1x&& 2x&&
2F 2F1F 1Fm2m1
2x1x
km1 m2
-
7/27/2019 S5.Oscilatii
6/12
6
iar mprind relaia cu produsul 21 mm scriem
0)xx(
mm
mmk)xx( 12
21
2112 =
++ &&&& , (10)
unde
21
21
21 mm
mm
m
1
m
11 +=+=
, (11)
adic
21
21
mm
mm
+= (11)
care poartnumele de masredus.
Totodatdeplasarea sistemului fade poziia de echilibru va fi:12 xxx = (12)
i, n consecin,
12 xxx &&&&&& = (13)
este acceleraia sistemului.nlocuind relaiile (11), (12) i (13) n (10), obinem
0xk
x =
+&& , (14)
care reprezintecuaia de micarea sistemului mecanic.
Efectund notaia 2k =
, unde estepulsaia proprie de oscilaie
a sistemului, rezult
0xx 2 =+&& . (15)
Scriem
202
201
2121 m
k
m
k
m
1
m
1k
k+=+=
+=
= , (16)
unde
101 m
k= i
202 m
k= (17) (18)
sunt pulsaiile proprii de oscilaie a doi oscilatori liniari armonici formaidintr-un corp, de mas 1m sau 2m , legat de un resort cu constanta de elasti-
citate k.
CumT
2= , unde T esteperioada proprie de oscilaie, prin egalare,
scriindT
2k =
, obinem
-
7/27/2019 S5.Oscilatii
7/12
7
202
201
2
k2T
+
=
= . (19)
Problema V.3Fie doucorpuri cu masele 1m i 2m , fixate de pereii laterali prin
intermediul a douresorturi cu constantele de elasticitate 1k i 2k , corpu-
rile fiind legate ntre ele printr-un resort cu constanta de elasticitate k. Ssegseasc ecuaia de micare a sistemului mecanic format, pentru cazul n
care 202
2
1
1
m
k
m
k== , precum i frecvena proprie de oscilaie a sistemului.
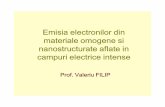
Sse afle ecuaia de micare i perioada de oscilaie pentru un sistemformat din doucorpuri cu mase identice m, legate ntre ele printr-un resorti de asemenea fixate de pereii laterali prin intermediul a dou resorturi,toate avnd aceeai constantde elasticitate k, sistemul oscilnd liber, frfrecare, pe o suprafaorizontal.R:
Ecuaia de micare a sistemului se obine utiliznd metoda separriicorpurilor, fcnd deci reprezentarea forelor care acioneazasupra corpu-rilor datoritprezenei celor trei resorturi.
Sistemul oscilnd n lungul axei Ox, notm cu1
x i2
x deplasrile
corpurilor cu masele 1m i respectiv 2m fa de poziiile de echilibru i
scriem pentru fiecare corp ecuaia fundamentala dinamicii:
11211 FFFxm =&& (1)
22122 FFFxm =&& , (2)
unde 1F , 2F i 1F , 2F reprezint forele care acioneaz asupra corpurilor
datoritprezenei resorturilor i configuraiei date, iar 1x&& i 2x&& sunt accele-
raiile celor doucorpuri.
k2k1
2x1x
km1 m2
1x&& 2x&&
2
F2
F1
F1
Fm2m1 2
F 1
F
-
7/27/2019 S5.Oscilatii
8/12
8
Cu
11 kxF = , 22 kxF = i 111 xkF = , 222 xkF = ,
relaiile (1) i (2) devin1121111211 xk)xx(kxkkxkxxm ==&& (3)
2221222122 xk)xx(kxkkxkxxm ==&& (4)
sau0xk)xx(kxm 112111 =++&& (5)
0xk)xx(kxm 222122 =+&& , (6)
pe care le scriem sub forma:
0xmk)xx(
mkx 1
1
1211
1 =++&& (7)
0xm
k)xx(
m
kx 2
2
221
22 =+&& . (8)
Conform enunului problemei cu 202
2
1
1
m
k
m
k== , relaiile (7) i (8)
devin:
0x)xx(m
kx
1
2
02111
=++&& (9)
0x)xx(m
kx 2
2021
22 =+&& . (10)
Efectund diferena relaiilor (9) i (10), obinem
0)xx()xx(m
1
m
1k)xx( 21
2021
2121 =+
++ &&&& . (11)
Deoarece
2121
21 mm
mm
m
1
m
11 +=+= sau 21
21 mm
mm
+= (12) (12)
este masa redusi cum
21 xxx = (13)
reprezintdeplasarea sistemului fade poziia de echilibru, iar
21 xxx &&& = (14)
este viteza, iar
21 xxx &&&&&& = (15)
acceleraia sistemului, nlocuind n relaia (11) rezult
-
7/27/2019 S5.Oscilatii
9/12
9
0xk
x 20 =
+
+&& , (16)
care constituie ecuaia de micarea sistemului dat.Efectund notaia 220
k=+
, unde estepulsaia proprie de osci-
laie, obinem
0xx 2 =+&& . (17)
Cum
20
k+
= (18)
i totodatntruct= 2 , (19)
unde este frecvena proprie de oscilaiea sistemului mecanic considerat,
prin egalare =+
2k 2
0 , vom gsi
20
k
2
1+
= . (20)
n cazul particular cnd cele doucorpuri au masa identic, notatm,i sunt legate att ntre ele, ct i de pereii laterali prin resorturi cu aceeaiconstantde elasticitate k vom afla direct, din relaiile deduse anterior, ecu-aia de micare i perioada de oscilaie a sistemului.
Utiliznd relaiile (12), (16) i (18) n care nlocuim
m
k20 = i 2
m= (21) (22)
gsim ecuaia de micarea sistemului considerat:
0x
m
k3x =+&& sau 0xx 2 =+&& (23) (23)
unde s-a utilizat notaiam
k32 = , fiind pulsaia proprie de oscilaie n
acest caz.
CumT
2= , unde T esteperioada proprie de oscilaie, prin egalare
T
2
m
k3 = , rezult
k3
m2T = . (24)
-
7/27/2019 S5.Oscilatii
10/12
10
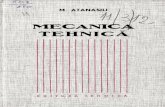
Problema V.
Sse gseascecuaia de micare pentru un sistem format din doucorpuri identice, cu masa m, prinse ntre ele prin douresorturi, legate fie nserie, fie n paralel i avnd fiecare constanta de elasticitate k, dacasupraunuia dintre corpuri acioneazo forexcitatoare de forma tcosF0 .
R:n scopul aflrii ecuaiei de micare a sistemului se utilizeazmetoda
separriicorpurilor.Considerm csistemul oscileazn lungul axei Ox i, notnd cu 1x
i 2x deplasrile corpurilor fade poziiile lor de echilibru, scriem pentru
fiecare corp ecuaia fundamentala dinamicii.Astfel, avem
tcosFFFxm 0121 +=&& (1)
212 FFxm =&& , (2)
unde tcosF)t(F 0 = este fora excitatoare periodiccare variazarmonic
n timp, 1F , respectiv 2F reprezintforele cu care un corp acioneazasupra
celuilalt datoritprezenei resortului, iar 1x&& i 2x&& acceleraiile corpurilor.
Cu
1e1 xkF = i 2e2 xkF = ,
relaiile (1) i (2) devin
tcosF)xx(ktcosFxkxkxm 021e01e2e1 +=+=&& (3)
)xx(kxkxkxm 21e2e1e2 ==&& (4)
sautcosF)xx(kxm 021e1 =+&& (5)
0)xx(kxm 21e2 =&& . (6)
2x&& 1x&&
1F 1F2F 2Fmm
1x2x
ekm m
tcosF0
)t(F
-
7/27/2019 S5.Oscilatii
11/12
11
Efectund diferena relaiilor (5) i (6), obinem
tcosF)xx(k2)xx(m 021e21 =+ &&&& , (7)
iar mprind relaia cu m scriem
tcosm
F)xx(
m
k2)xx( 021
e21 =+ &&&& . (8)
Deplasarea sistemului fade poziia de echilibru va fi:
21 xxx = (9)
i, n consecin, 21 xxx &&& = este viteza, iar
21 xxx &&&&&& = (10)
este acceleraia sistemului.
nlocuind relaia (10) n (8), obinem
tcosqxm
k2x e =+&& , (11)
cum
Fq 0= , care reprezintecuaia de micarea sistemului considerat.
n general, pentru legarea n serie, respectiv pentru legarea n paralela n resorturi avem formulele:
=
=n
1i is k
1
k
1 i
=
=n
1iip kk , (12) (13)
i pentru n = 2
21s k
1
k
1
k
1+= i 21p kkk += , (14) (15)
iar cnd kkk 21 == obinem
k
2
k
1
s
= i deci2
kk s = (16) (16)
k2kp
= . (17)
Prin urmare, constanta de elasticitate echivalenta legrii resorturilorn serie sau n paralel va fi notat esk sau epk , unde
2
kk es = i k2k ep = . (18) (19)
Revenind la relaia (11), efectum urmtoarele notaii n care nlo-cuim i expresiile (18) i (19):
m
k
m
k2 es2s0 == i m
k4
m
k2 ep2p0 == , (20) (21)
deci
-
7/27/2019 S5.Oscilatii
12/12
12
2s0
2p0 4m
k4 == , deci s0p0 2= , (22) (23)
cu s0p0 > , unde s0 i p0 suntpulsaiile proprii de oscilaiea siste-mului cnd cele doucorpuri avnd masa m sunt prinse ntre ele prin douresorturi identice, cu constanta de elasticitate k, legate fie n serie, fie nparalel.
Astfel, pentru fiecare din cele doucazuri, rezultecuaia de micarea oscilatorului neamortizat care efectueazoscilaii forate:
tcosqxx 2s0 =+&& , (24)
respectiv
tcosqxx 2
p0
=+&& . (25)