Proiect Parteneriate PCCA 2011 -...
54
Unitatea Executiva pentru Finantarea Invatamantului Superior, a Cercetarii, Dezvoltarii si Inovarii www.uefiscdi.gov.ro Proiect Parteneriate PCCA 2011 Director de proiect: dr. Ligia Munteanu Institutul de Mecanica Solidelor al Academiei Romane Responsabil partener:prof. dr. Cornel Brişan Universitatea Tehnica din Cluj-Napoca Titlul proiectului: Interfete haptice reconfigurabile utilizate in reproducerea contactului dinamic- dezvoltari teoretice si experimentale
Transcript of Proiect Parteneriate PCCA 2011 -...
Unitatea Executiva pentru Finantarea Invatamantului Superior, a Cercetarii, Dezvoltarii si
Inovarii www.uefiscdi.gov.ro
Proiect Parteneriate PCCA 2011
Director de proiect: dr. Ligia Munteanu
Institutul de Mecanica Solidelor al Academiei
Romane
Responsabil partener:prof. dr. Cornel Brişan
Universitatea Tehnica din Cluj-Napoca
Titlul proiectului: Interfete haptice reconfigurabile
utilizate in reproducerea contactului dinamic-
dezvoltari teoretice si experimentale
Unitatea Executiva pentru Finantarea Invatamantului Superior, a Cercetarii, Dezvoltarii si
Inovarii www.uefiscdi.gov.ro
Cuprins
1. Date despre proiect
2. Rezumat proiect
3. Obiective si activitati
4. Evaluarea realizarii obiectivelor si activitatilor.
Indicatori de proces
5. Principalele rezultate noi
6. Diseminarea rezultatelor
7. Implicarea doctoranzilor
8. Impactul rezultatelor
9. Concluzii
10. Galerie figuri/poze
Unitatea Executiva pentru Finantarea Invatamantului Superior, a Cercetarii, Dezvoltarii si
Inovarii www.uefiscdi.gov.ro
1. Date despre proiect
Domeniul de cercetare 7- Materiale, procese si produse
inovative
Contract 149/2012
Durata proiectului: 48 luni (19 iulie 2012-30 iunie 2016 )
Valoarea proiectului: 2000000 lei
Pagina Web:
http://www.imsar.ro/html/___pnii_cod_247_2007.html
Unitatea Executiva pentru Finantarea Invatamantului Superior, a Cercetarii, Dezvoltarii si
Inovarii www.uefiscdi.gov.ro
Echipa proiectului
echipa IMSAR (CO):
dr. Ligia Munteanu - director proiect (n.1967)
dr. Veturia Chiroiu – cercetător (n.1942)
dr. Dan Dumitriu – cercetător (n.1974)
doctorand Octav Melinte (n.1982)
doctorand Victor Vlădăreanu (n.1985)
echipa UTCN (P1):
prof. dr. Cornel Brişan - responsabil proiect din partea UTCN (n.1963)
prof. dr. Mircea Dudescu – cercetător (n. 1971)
doctorand Razvan Vasiu (n.1985) (demisie 15.11.2013)
doctorand Lucian Ilea- cercetător (n.1968) (angajare 28.01.2014)
Unitatea Executiva pentru Finantarea Invatamantului Superior, a Cercetarii, Dezvoltarii si
Inovarii www.uefiscdi.gov.ro
2. Rezumat proiect
Scopul proiectului consta in dezvoltarea unui simulator auto in
care raspunsul drumului la actiunea autovehiculului ocupa un loc central
(acronim HD RoReSi - Road Response Simulator).
Simulatorul este proiectat ca interfata haptica reconfigurabila cu sistem de control
in timp real a functiilor care descriu contactul dinamic pneu/cale de rulare si
scaun/sofer.
Produsul valideaza doua concepte noi:
1) Reproducerea fenomenelor care apar in timpul deplasarii unui automobil
printr-un mecanism de structura speciala, si
2. Reproducerea in domeniul dinamic in timp real a fenomenelor complexe de tip
contact roata - cale de rulare si respectiv, scaun - sofer.
Conceptele sunt combinate cu reconfigurabilitatea simulatorului dezvoltata printr-
un algoritm de control care ţine seama de interactiunea de tip haptic a vehiculului
cu mediul (calea de rulare si/sau soferul) si caracterizata de variatii neliniare ale
fortelor generalizate de contact.
Unitatea Executiva pentru Finantarea Invatamantului Superior, a Cercetarii, Dezvoltarii si
Inovarii www.uefiscdi.gov.ro
Cercetarea valideaza un produs final si anume un prototip
experimental reconfigurabil.
Simulatoarele clasice (inclusiv comerciale) se bazează majoritatea pe platforma
lui Stewart - o platformă mobilă acţionată de 6 motoare prin intermediul unor
lanţuri cinematice cu structură identică.
Aceste simulatoare nu pot reproduce situaţii în care de exemplu două roţi sunt pe
caldarâm şi două pe astfalt, sau miscarea off-road pe drumuri pietroase,
mlastinoase etc.
In simulatoarele clasice contactul se modeleaza prin translatarea torsorului în
centrul de masă al sistemului. Acest dezavantaj poate fi evitat dacă contactul
dinamic este reprodus şi nu simulat.
Unitatea Executiva pentru Finantarea Invatamantului Superior, a Cercetarii, Dezvoltarii si
Inovarii www.uefiscdi.gov.ro
3. Obiective si activitati
2012 Etapa I. Dezvoltarea modelului de interactiune dintre utilizatorul uman si
interfata haptica. Dezvoltarea unei structuri mecanice noi reconfigurabile pentru
simulatorul HD RoReSi
Termen de decontare 15 decembrie 2012
Buget 400000 lei
Activitate I.1 (CO+P) Analiza modelelor senzomotoare atunci cand utilizatorul
uman atinge un obiect real sau virtual
Activitate I.2 (CO+P) Simularea modelelor forţă-deformaţie
Activitate I.3 (P) Dezvoltarea tehnicilor de modelare CAD
Activitate I.4 (CO) Integrarea modelului cinematic
Activitate I.5 (CO) Dezvoltarea tehnicilor de detectare a contactului în timp real
Activitate I.6 (CO) Implementarea detectării contactului pentru condiţii pe
frontieră date
Activitate I.7 (P) Dezvoltarea hapticii netede a suprafeţelor
Activitate I.8 (P) Model al forţelor perturbatoare şi a deplasărilor
Activitate I.9 (CO+P) Vizite de lucru şi participare la conferinţe
Unitatea Executiva pentru Finantarea Invatamantului Superior, a Cercetarii, Dezvoltarii si
Inovarii www.uefiscdi.gov.ro
2013 Etapa II. Realizarea pachetulului modular algoritmic de control pentru
simulatorul HD RoReSi. Dezvoltarea algoritmilor de detectare in timp real a
contactului dinamic;
Termen de decontare 15 decembrie 2013
Buget 420000 lei
Activitatea II.2 (CO) Capabilităţi în timp real
Activitate II.3 (CO) Testarea consideraţiilor teoretice prin simulare
Activitate II.4 (P) Descrierea topologică a structurilor mecanice
Activitate II.5 (P) Sinteza dimensională şi optimizare
Activitate II.6 (P) Dinamica structurilor mecanice
Activitate II.7 (CO+P) Dezvoltarea componentelor interfaciale
Activitate II.8 (CO+P) Participare la conferinţe. Seminar lucru – Cercetări
avansate în domeniul structurilor mecanice reconfigurabile
Unitatea Executiva pentru Finantarea Invatamantului Superior, a Cercetarii, Dezvoltarii si
Inovarii www.uefiscdi.gov.ro
2014 Etapa III. Dezvoltarea de tehnici noi bazate pe calculul fortelor de
contact si integrarea lor in structura de control a simulatorului HD RoReSi
Termen de decontare 15 decembrie 2014
Buget 490000 lei
Activitatea III.1 (CO+P) Identificarea setului minim de parametri specifici
dinamici
Activitate III.2 (CO) Integrarea modelului dinamic si a sistemului de
control in configuratia de testare SiL (Software in the Loop)
Activitate III.3 (CO) Validarea SiL a consideratiilor teoretice si a
interfatarii echipamentelor haptice reale
Activitate III.4 (P) Dezvoltarea algoritmilor de control pentru compensarea
proprietatilor dinamice
Activitate III.5 (CO+P) Validari experimentale
Activitate III.6 (CO+P) Vizite de lucru si participare la conferinte
Seminar de lucru - Advanced research in real-time contact detection
algorithms
2015 Etapa IV. Realizarea structurii mecanice a simulatorului HD RoReSi
2016 Etapa V. Realizarea simulatorului HD RoReSi

Unitatea Executiva pentru Finantarea Invatamantului Superior, a Cercetarii, Dezvoltarii si
Inovarii www.uefiscdi.gov.ro
4. Evaluarea realizarii obiectivelor si activitatilor
Gradul de realizare a obiectivelor etapei I (2012), etapei II (2013) si etapei
III (2014) prin intermediul a 3 activităţi din 6, este 100%.
Indicatori de proces
2012 Articole ISI
Numar prevazut: 1
Numar realizat: 1 (Factor de impact 0,724)
Articole baze de date internationale
Numar prevazut: 3
Numar realizat: 5
Valoarea investitiilor în echipamente : 92125,63 lei
5 lucrari proceedings conferinte
Unitatea Executiva pentru Finantarea Invatamantului Superior, a Cercetarii, Dezvoltarii si
Inovarii www.uefiscdi.gov.ro
2013 Articole ISI
Numar prevazut: 1
Numar realizat: 3 (factor de impact cumulat 5,864)
Articole baze de date internationale
Numar prevazut: 3
Numar realizat: 7
Valoarea investiţiilor în echipamente : 61415 lei
8 lucrari proceedings conferinte, 1 capitol carte, 6 citari
2014 (in primele 6 luni)
Articole ISI
Numar prevazut: 2
Numar realizat: 2 (factor de impact cumulat 4,922)
Articole baze de date internationale
Numar prevazut: 3
Numar realizat: 6
5 lucrari proceedings conferinte, 12 citari
Unitatea Executiva pentru Finantarea Invatamantului Superior, a Cercetarii, Dezvoltarii si
Inovarii www.uefiscdi.gov.ro
In conformitate cu Journal Citation Reports 2013, publicate de
Thomson Reuters,
factorul de impact cumulat al articolelor publicate este 11,51
scorul relativ de influenţă SRI este 8,89801
Unitatea Executiva pentru Finantarea Invatamantului Superior, a Cercetarii, Dezvoltarii si
Inovarii www.uefiscdi.gov.ro
2. Principalele rezultate noi
Dezvoltarea tehnicilor de modelare CAD Rezultatele noastre se refera la răspunsul drumului simulat din punct de vedere
al cerinţelor unui simulator de conducere, si nu ca studiu de dinamică auto
(programe CARSIM).
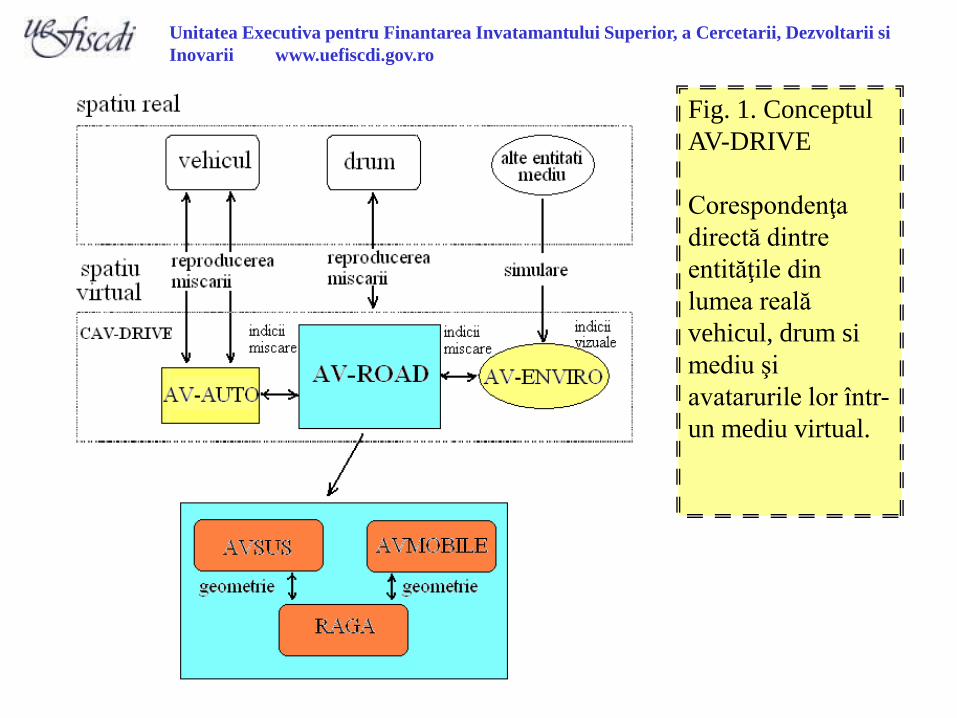
Acronimul propus pentru modelul de simulare este AV-DRIVE (Computer
Avatar- Conducere Simulator).
Cuvântul vine de la Avatar - utilizator alter ego şi a reprezentării sale grafice
într-un mediu virtual on-line. Prin analogie, conceptul AV-DRIVE se bazează
pe corespondenţa directă dintre entităţile din lumea reală care generează
informaţii pentru subiecţii umani conducători auto şi avatarurile lor care pot
simula informaţii similare într-un mediu simulat artificial.
Unitatea Executiva pentru Finantarea Invatamantului Superior, a Cercetarii, Dezvoltarii si
Inovarii www.uefiscdi.gov.ro
Componentele AV-DRIVE :
AV-ROAD - set de elemente care produc excitaţia drumului avand
subcomponente:
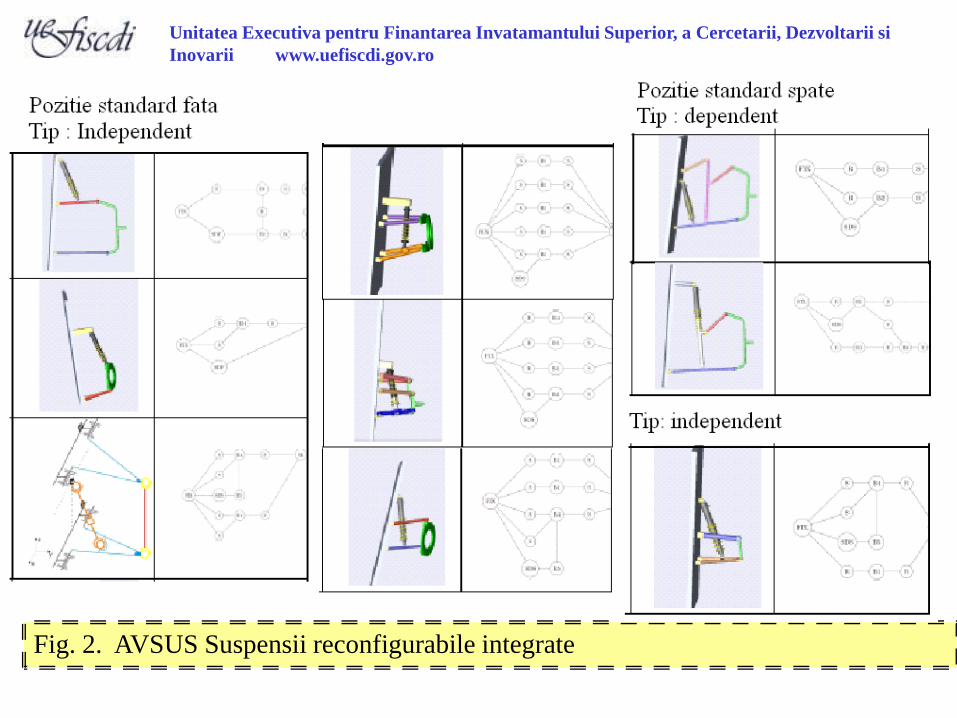
AVSUS - suspensii Avatar
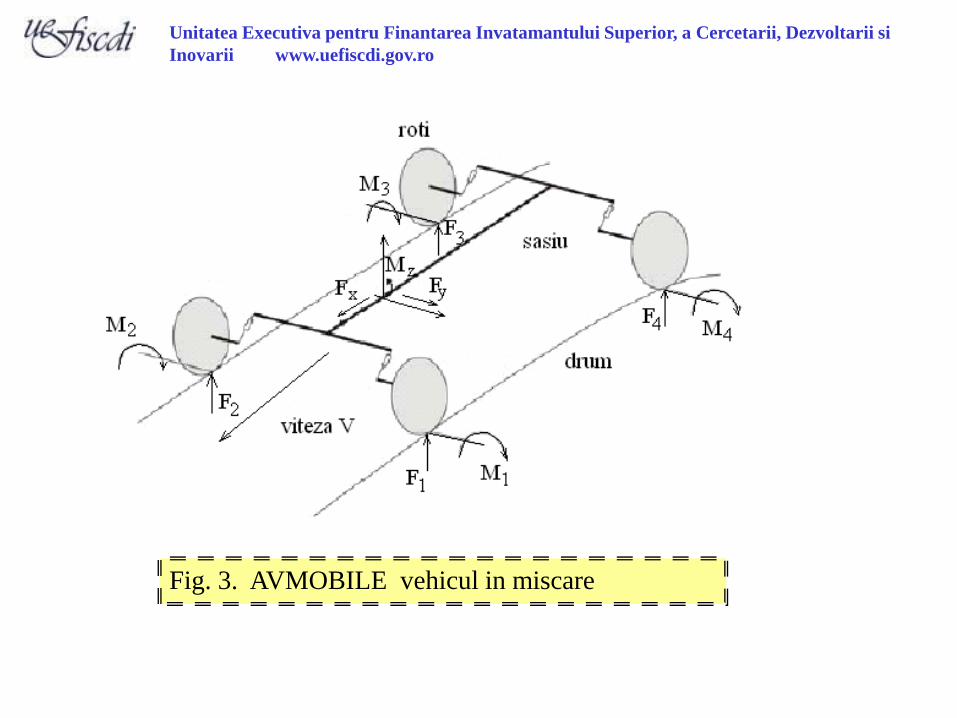
AVMOBILE - platformă mobilă Avatar care generează mişcări
caracterizate de frecvenţă joasă şi amplitudine mare
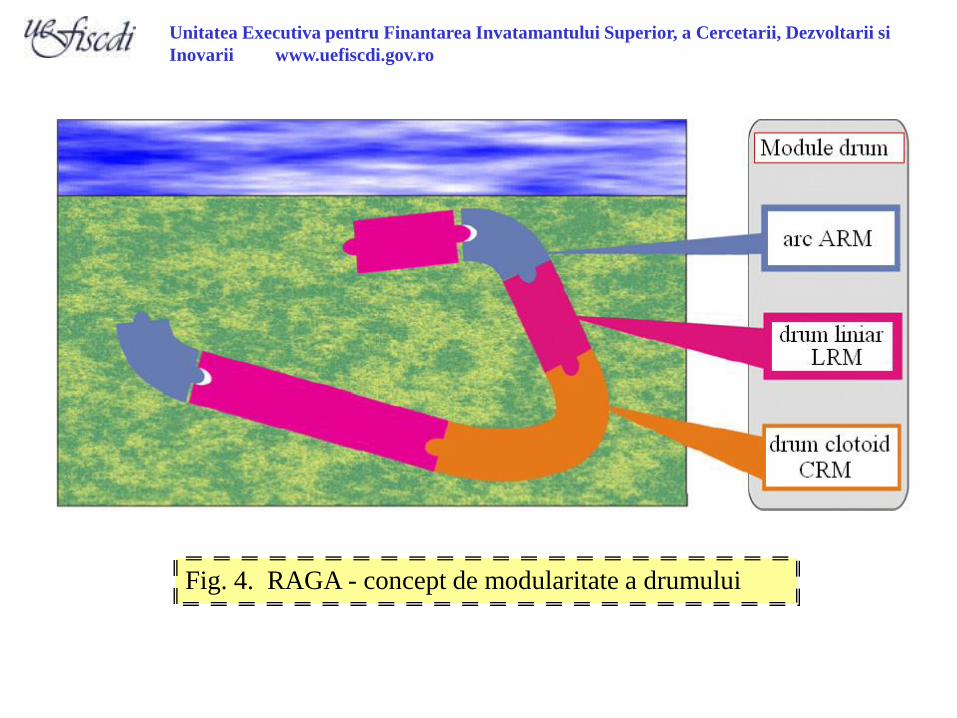
RAGA – model reconfigurabil modular pentru drum
AV-AUTO - reproducerea structurii autovehiculului
AV-ENVIRO - autovehicul virtual între-un mediu virtual: peisaj, participanţi
la trafic, oameni, etc.
Unitatea Executiva pentru Finantarea Invatamantului Superior, a Cercetarii, Dezvoltarii si
Inovarii www.uefiscdi.gov.ro
Fig. 1. Conceptul
AV-DRIVE
Corespondenţa
directă dintre
entităţile din
lumea reală
vehicul, drum si
mediu şi
avatarurile lor într-
un mediu virtual.
Unitatea Executiva pentru Finantarea Invatamantului Superior, a Cercetarii, Dezvoltarii si
Inovarii www.uefiscdi.gov.ro
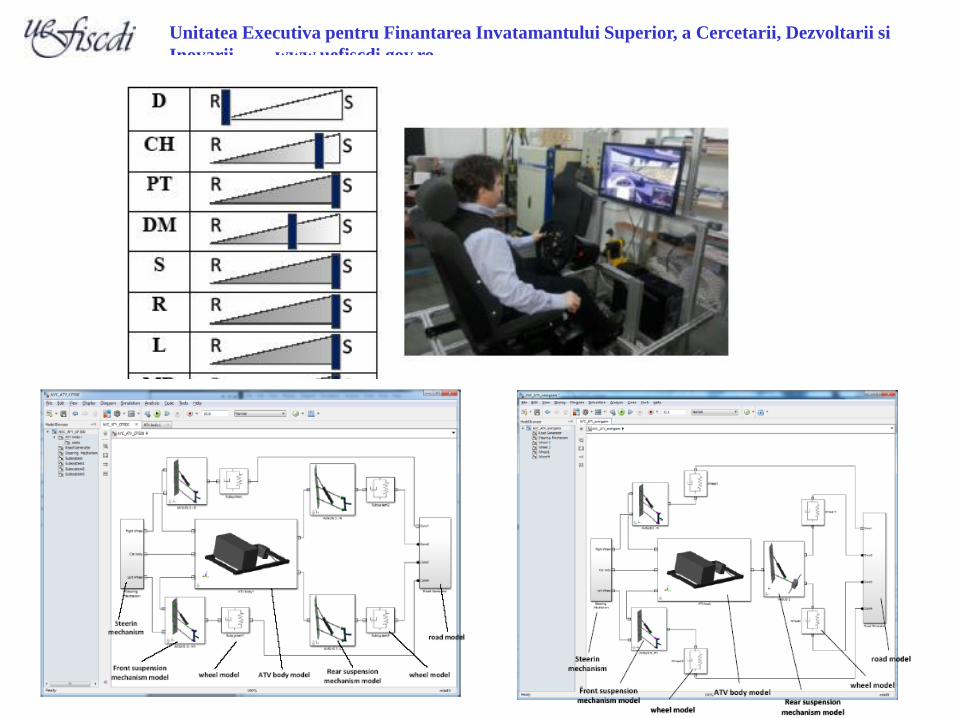
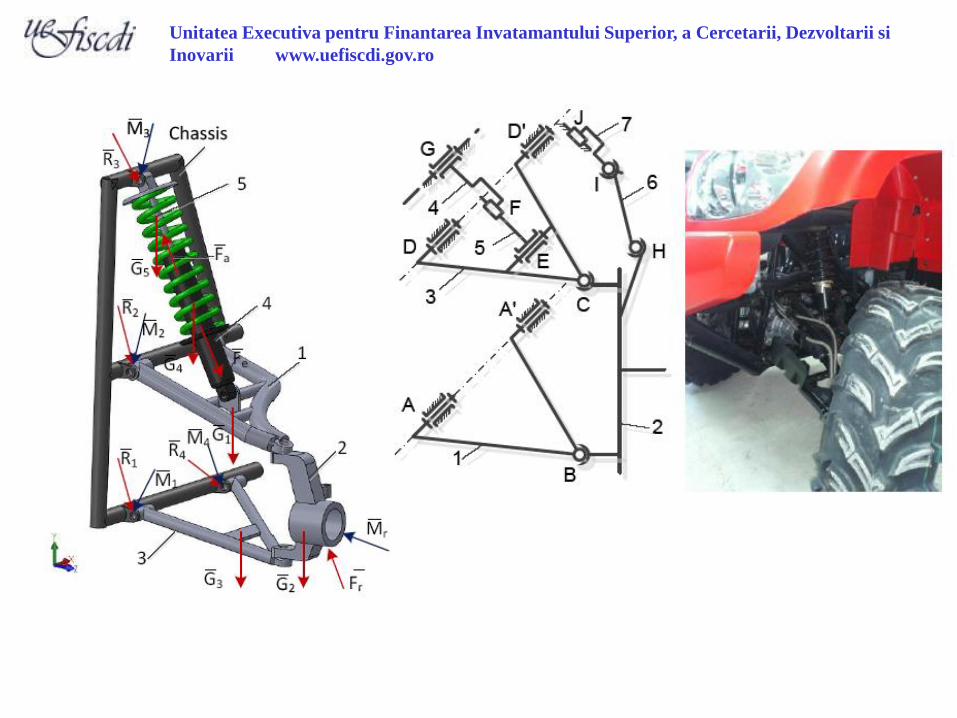
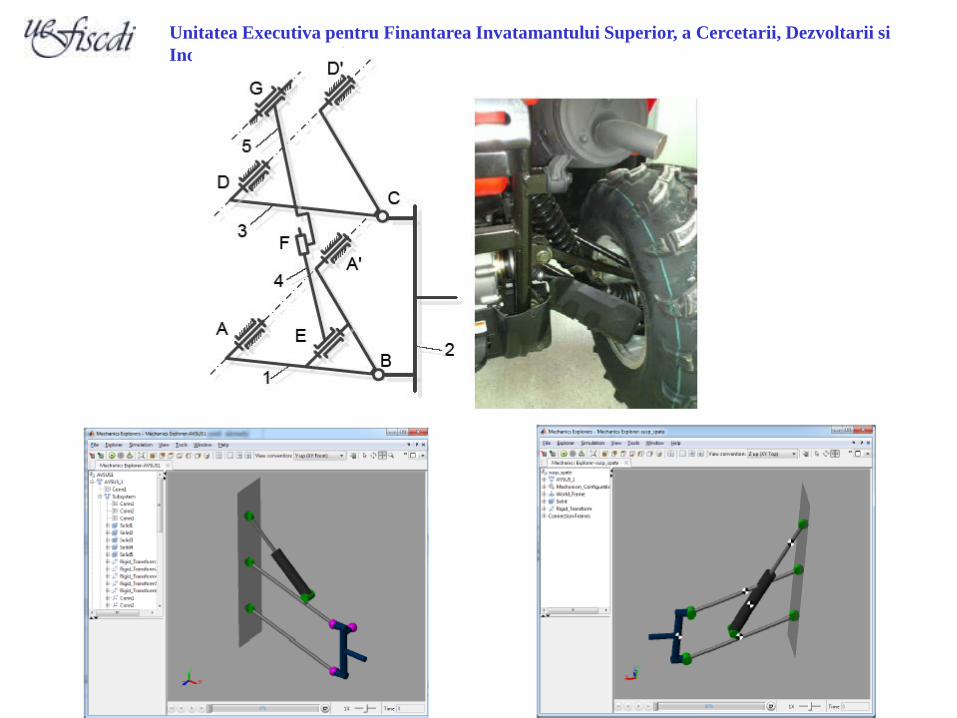
Fig. 2. AVSUS Suspensii reconfigurabile integrate
Unitatea Executiva pentru Finantarea Invatamantului Superior, a Cercetarii, Dezvoltarii si
Inovarii www.uefiscdi.gov.ro
Fig. 3. AVMOBILE vehicul in miscare
Unitatea Executiva pentru Finantarea Invatamantului Superior, a Cercetarii, Dezvoltarii si
Inovarii www.uefiscdi.gov.ro
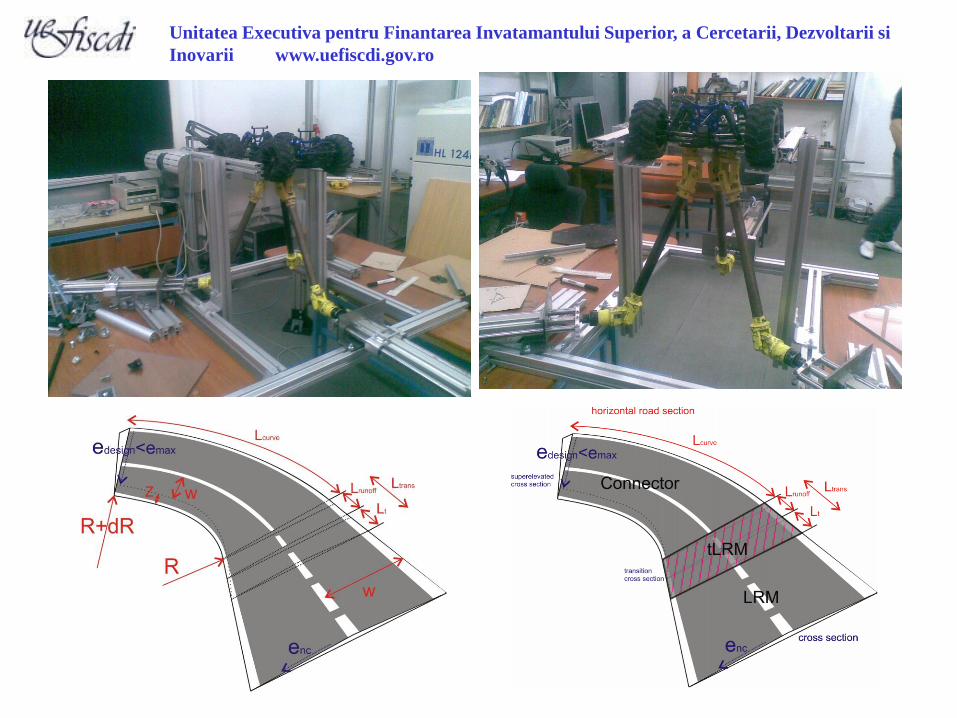
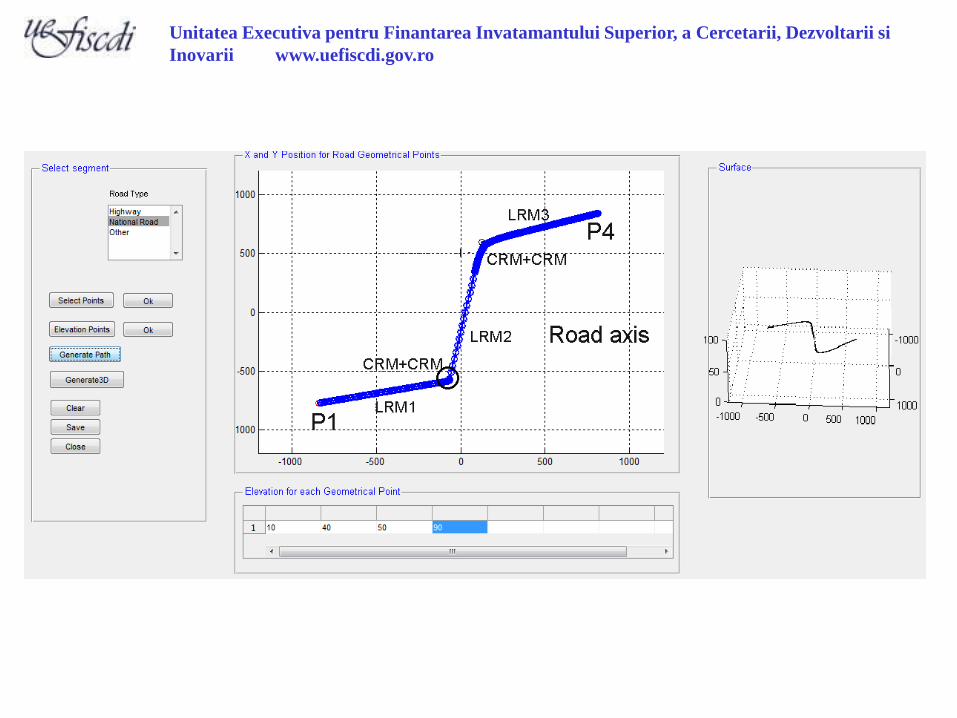
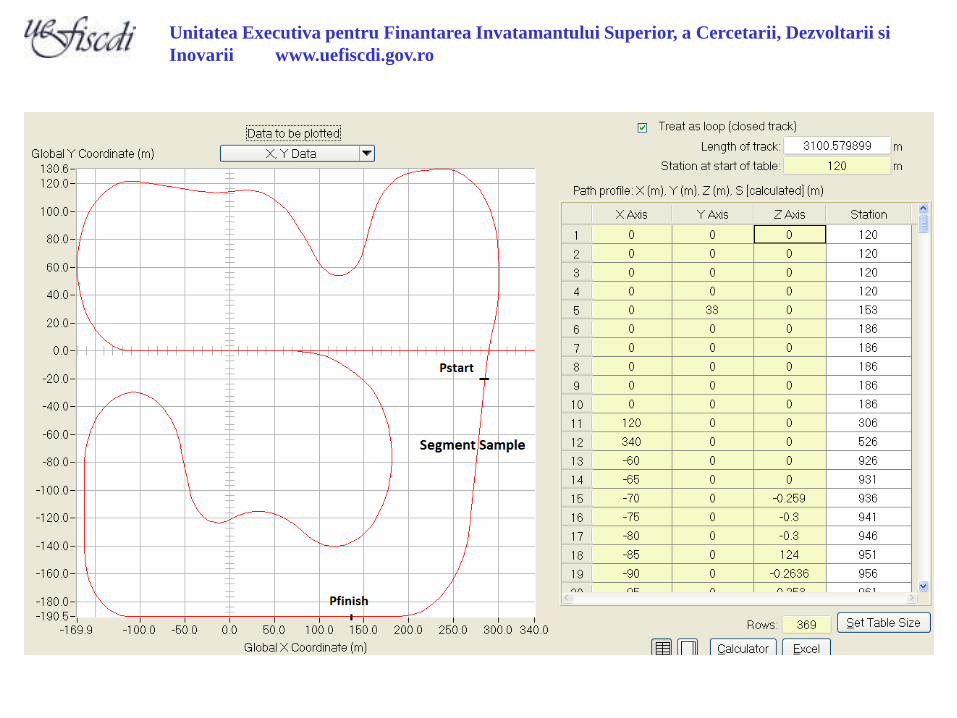
Fig. 4. RAGA - concept de modularitate a drumului
Unitatea Executiva pentru Finantarea Invatamantului Superior, a Cercetarii, Dezvoltarii si
Inovarii www.uefiscdi.gov.ro
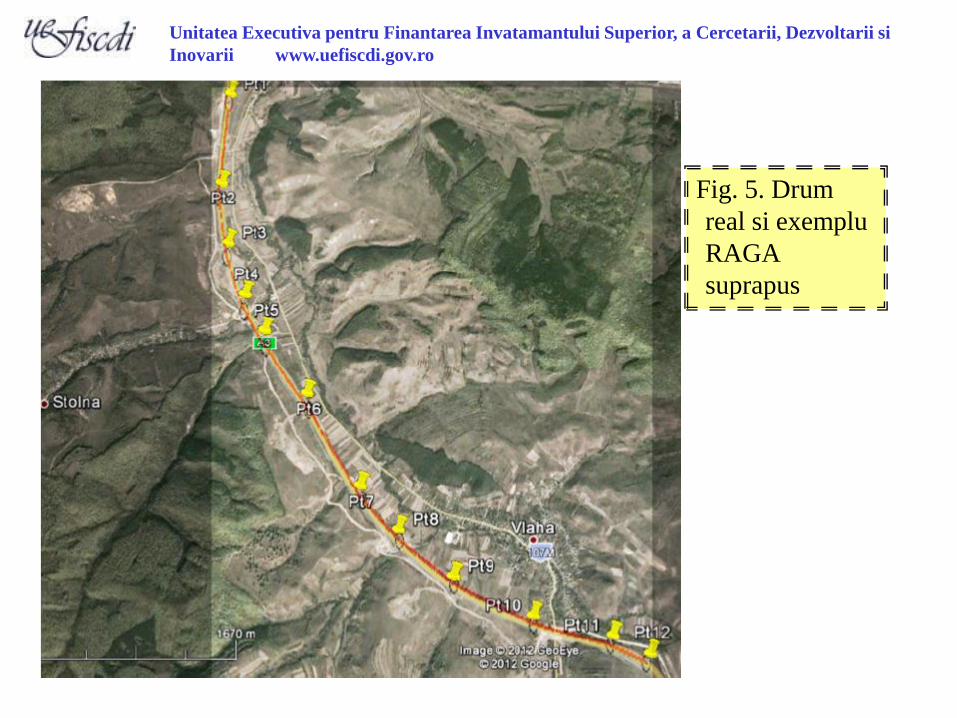
Fig. 5. Drum
real si exemplu
RAGA
suprapus
Unitatea Executiva pentru Finantarea Invatamantului Superior, a Cercetarii, Dezvoltarii si
Inovarii www.uefiscdi.gov.ro
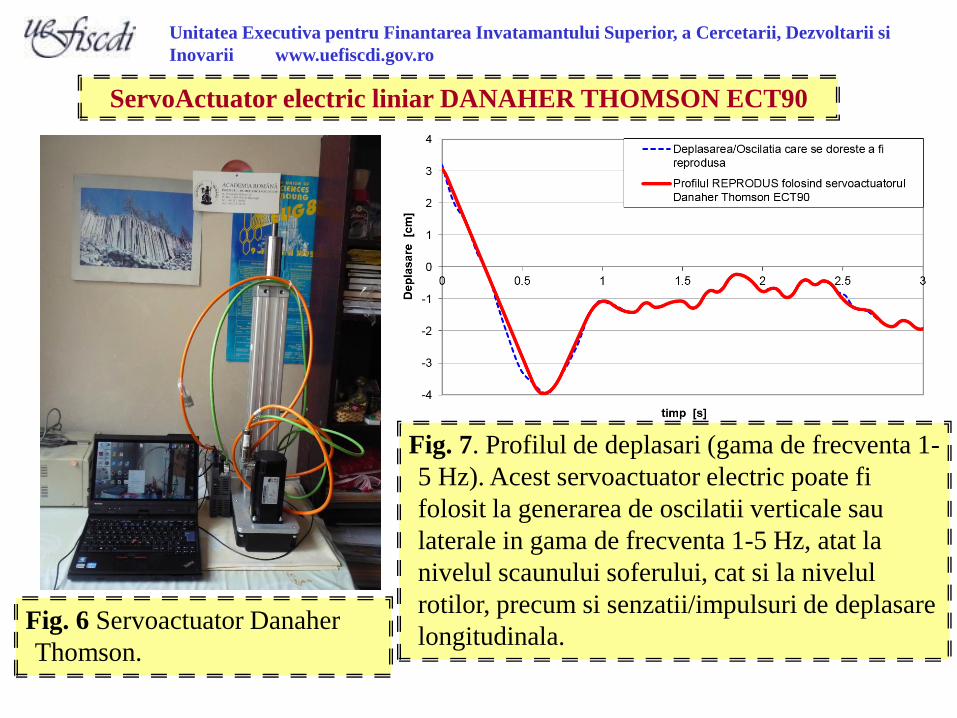
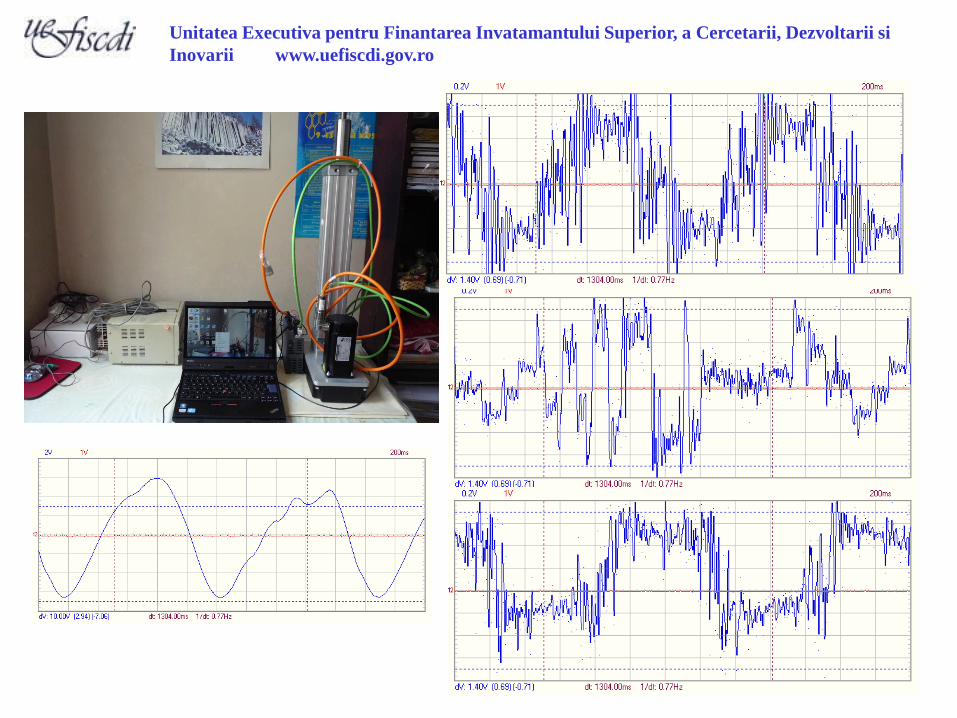
ServoActuator electric liniar DANAHER THOMSON ECT90
Fig. 6 Servoactuator Danaher
Thomson.
Fig. 7. Profilul de deplasari (gama de frecventa 1-
5 Hz). Acest servoactuator electric poate fi
folosit la generarea de oscilatii verticale sau
laterale in gama de frecventa 1-5 Hz, atat la
nivelul scaunului soferului, cat si la nivelul
rotilor, precum si senzatii/impulsuri de deplasare
longitudinala.
Unitatea Executiva pentru Finantarea Invatamantului Superior, a Cercetarii, Dezvoltarii si
Inovarii www.uefiscdi.gov.ro
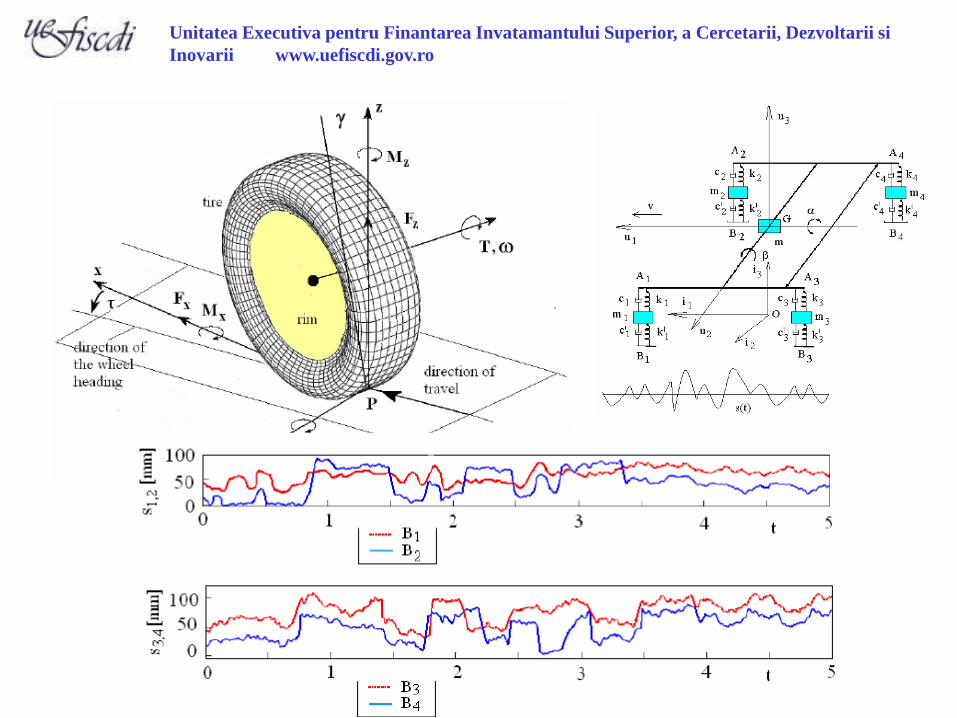
Dezvoltarea tehnicilor de detectare a
contactului/impactului in timp real
Rezultatele noastre se refera la la modelarea contactului dinamic prin
includerea fenomenele de vibroimpact si alunecare cu frecare.
Vibroimpactul apare la amplitude mare, atunci cand suprafetele adiacente
in contact se misca intr-o directie normala pe directia tangentiala.
Alunecarea are loc atunci cand suprafetele adiacente in contact se misca
tangential una in raport cu cealalta datorita unei sarcini externe
tangentiale.
In aceste conditii apar neliniaritati in caracteristicile de rigiditate si
amortizare a interfetelor prin aparitia lipirii si alunecarii.
Alte rezultate se refera la dezvoltarea unor algoritmi de recunoastere in
timp real a contactului dinamic si la validari experimentale pentru trecerea
de la desene CAD la executie.
Unitatea Executiva pentru Finantarea Invatamantului Superior, a Cercetarii, Dezvoltarii si
Inovarii www.uefiscdi.gov.ro
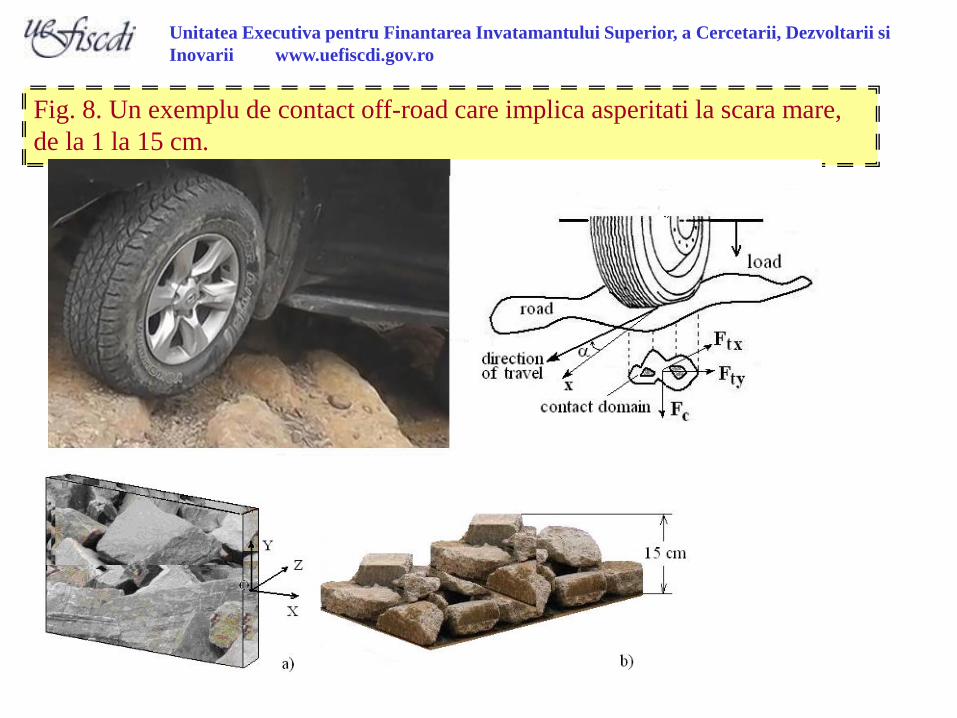
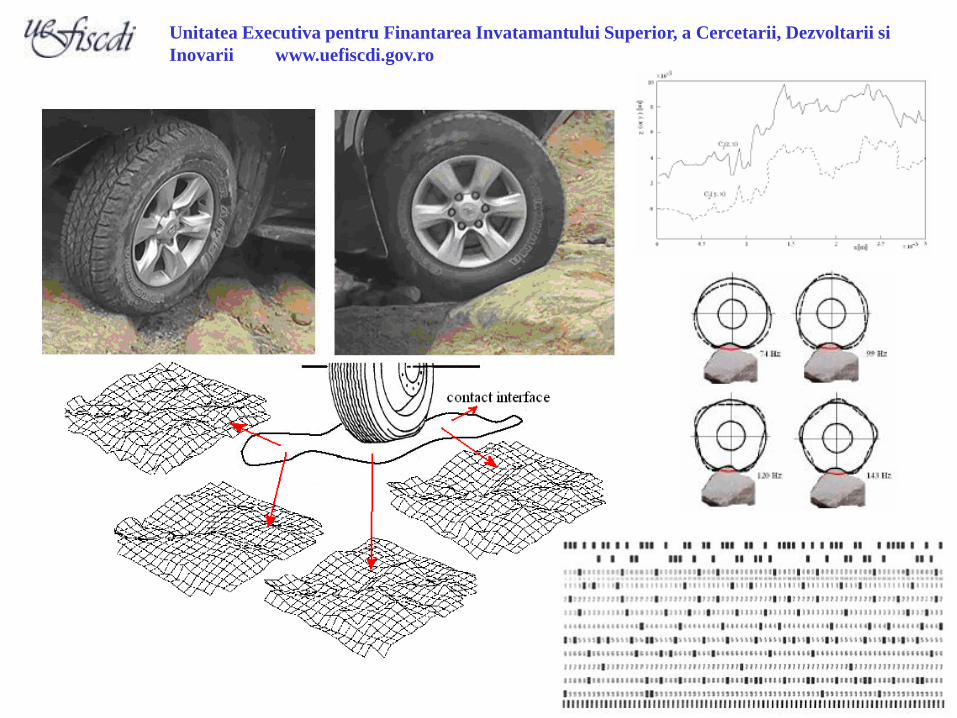
Fig. 8. Un exemplu de contact off-road care implica asperitati la scara mare,
de la 1 la 15 cm.
Fig. 6. Contact dintre roata si off-road
Unitatea Executiva pentru Finantarea Invatamantului Superior, a Cercetarii, Dezvoltarii si
Inovarii www.uefiscdi.gov.ro
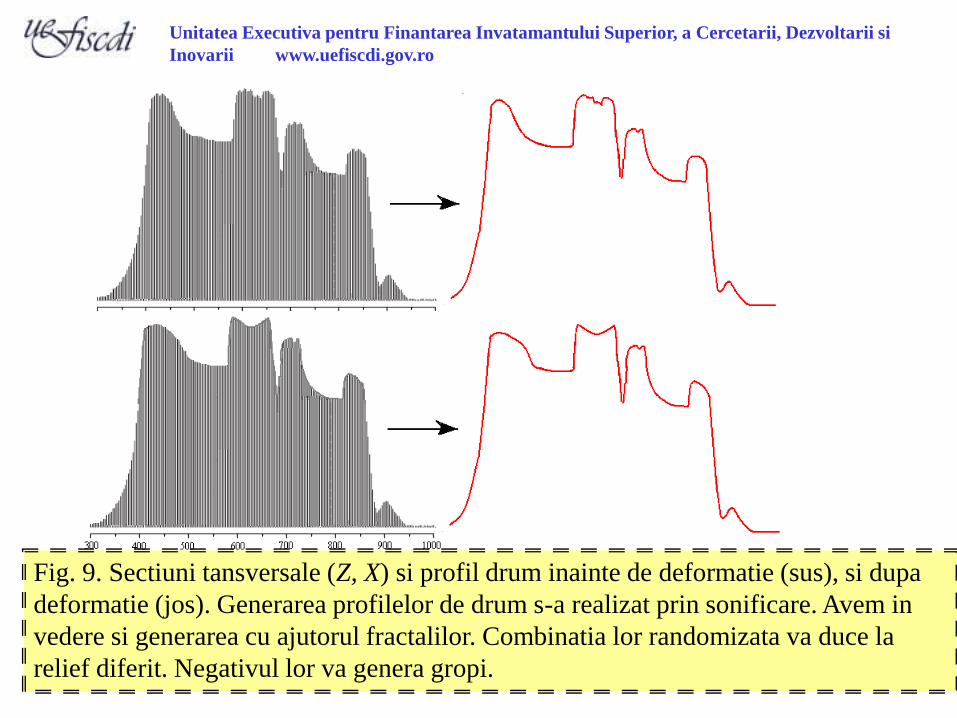
Fig. 9. Sectiuni tansversale (Z, X) si profil drum inainte de deformatie (sus), si dupa
deformatie (jos). Generarea profilelor de drum s-a realizat prin sonificare. Avem in
vedere si generarea cu ajutorul fractalilor. Combinatia lor randomizata va duce la
relief diferit. Negativul lor va genera gropi.
Unitatea Executiva pentru Finantarea Invatamantului Superior, a Cercetarii, Dezvoltarii si
Inovarii www.uefiscdi.gov.ro
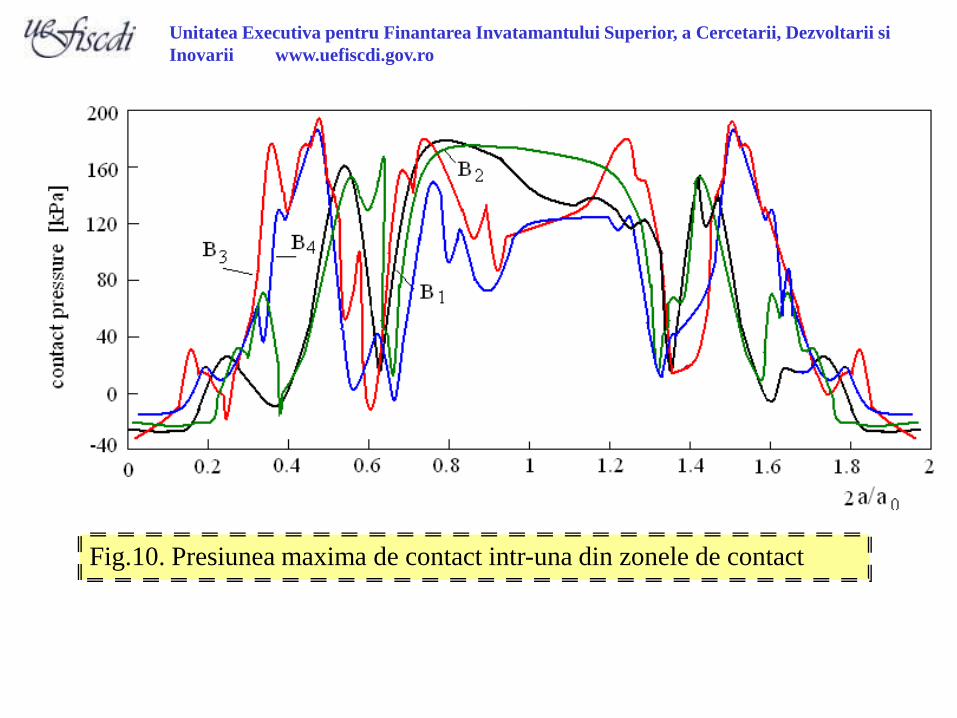
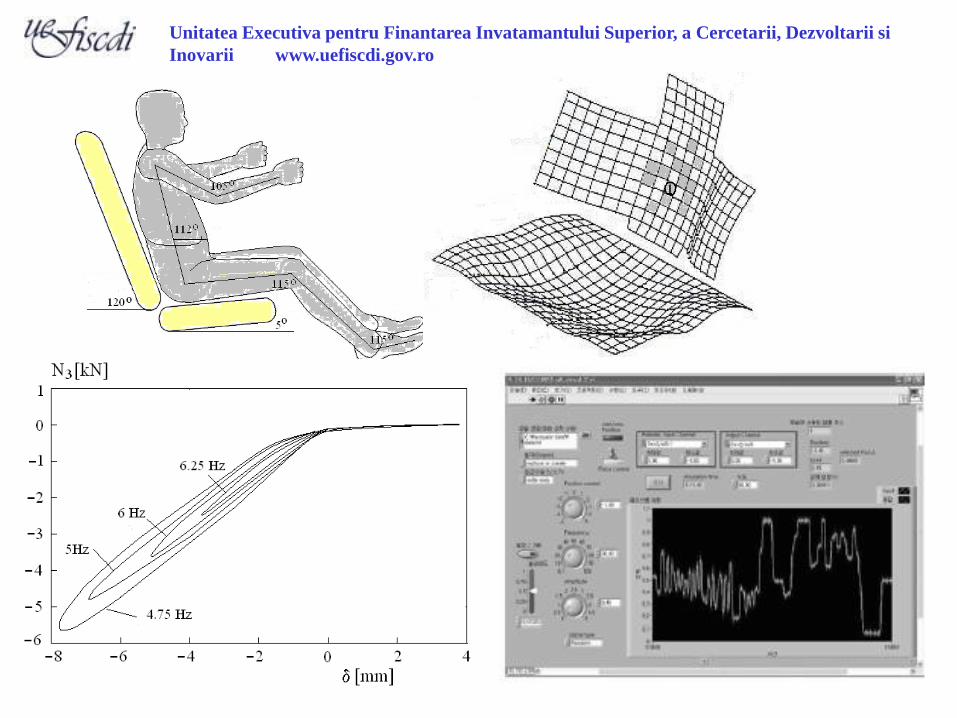
Fig.10. Presiunea maxima de contact intr-una din zonele de contact
Unitatea Executiva pentru Finantarea Invatamantului Superior, a Cercetarii, Dezvoltarii si
Inovarii www.uefiscdi.gov.ro
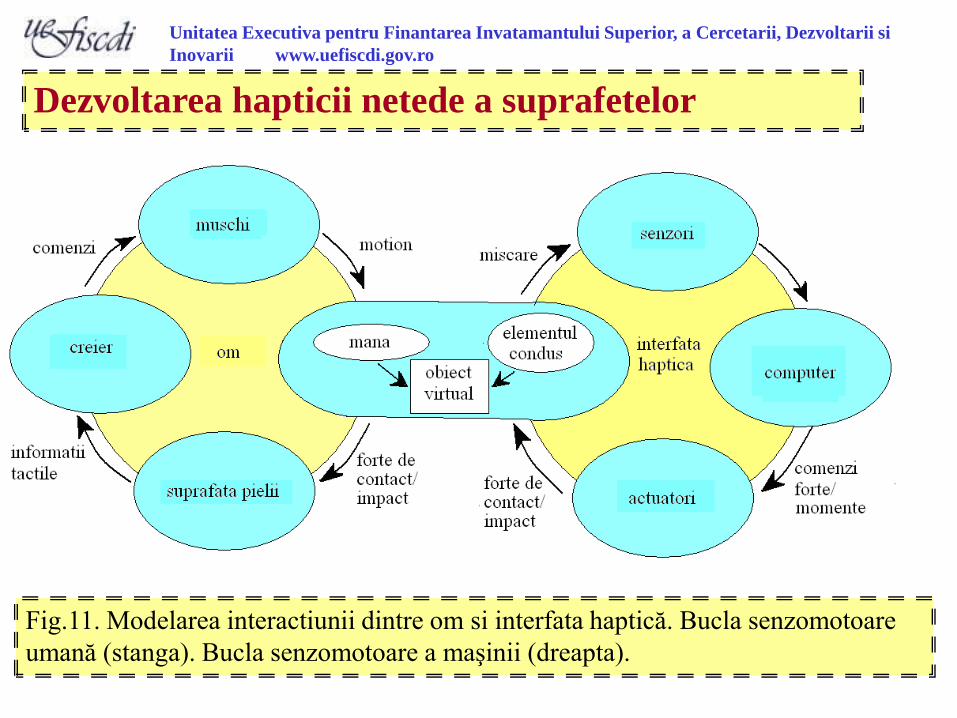
Fig.11. Modelarea interactiunii dintre om si interfata haptică. Bucla senzomotoare
umană (stanga). Bucla senzomotoare a maşinii (dreapta).
Dezvoltarea hapticii netede a suprafetelor
Unitatea Executiva pentru Finantarea Invatamantului Superior, a Cercetarii, Dezvoltarii si
Inovarii www.uefiscdi.gov.ro
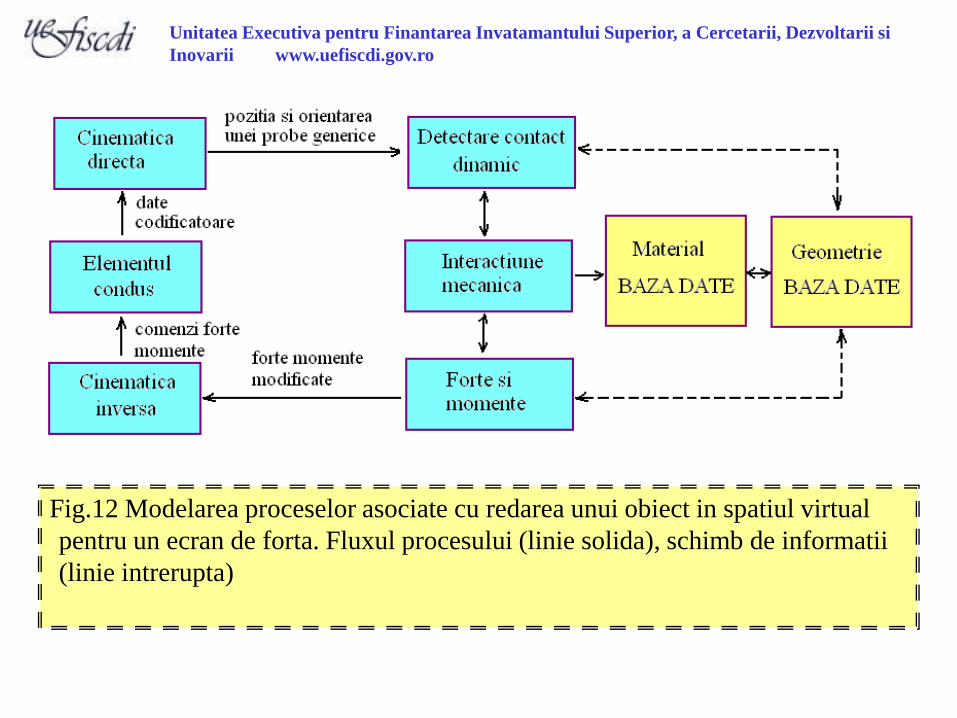
Fig.12 Modelarea proceselor asociate cu redarea unui obiect in spatiul virtual
pentru un ecran de forta. Fluxul procesului (linie solida), schimb de informatii
(linie intrerupta)
Unitatea Executiva pentru Finantarea Invatamantului Superior, a Cercetarii, Dezvoltarii si
Inovarii www.uefiscdi.gov.ro
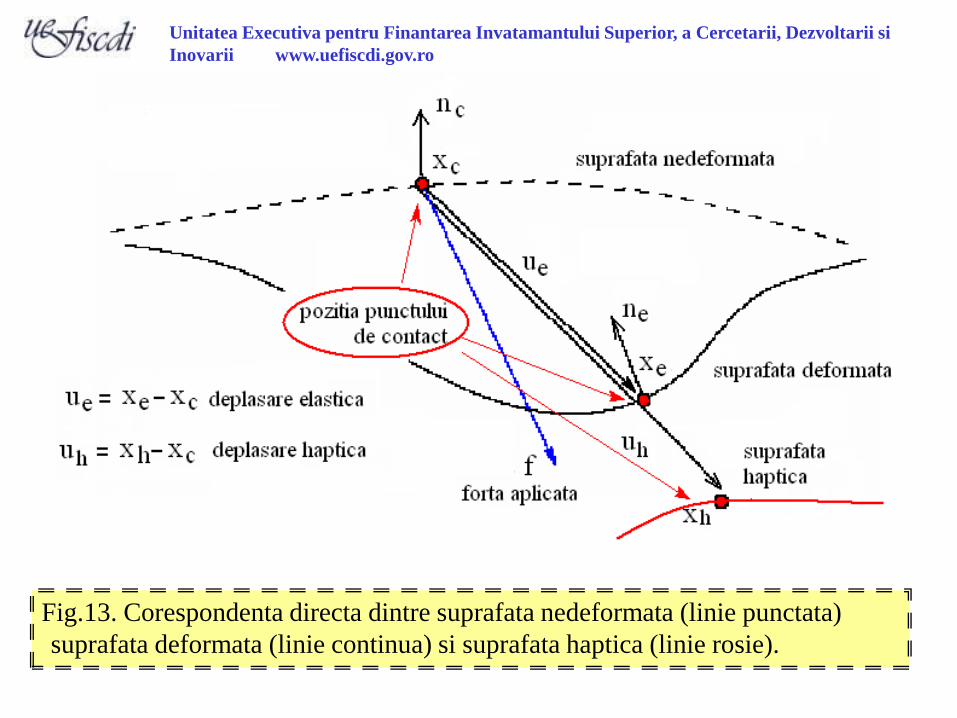
Fig.13. Corespondenta directa dintre suprafata nedeformata (linie punctata)
suprafata deformata (linie continua) si suprafata haptica (linie rosie).
Unitatea Executiva pentru Finantarea Invatamantului Superior, a Cercetarii, Dezvoltarii si
Inovarii www.uefiscdi.gov.ro
6. Diseminarea rezultatelor
Articole publicate în jurnale cotate ISI (6)
[1] L.Munteanu, C.Brişan, St.Donescu, V.Chiroiu, On the compression viewed
as a geometric transformation, CMC: Computers, Materials & Continua,
vol.20, nr.1, pp.1-20, 2012 IF 0,724, ISSN 1546-2218
http://www.techscience.com/doi/10.3970/cmc.2012.031.127.html
[2] C. Brişan, R. V. Vasiu, L. Munteanu, A modular road auto-generating
algorithm for developing the road models for driving simulators,
Transportation Research part C: Emerging Technologies, vol.26, pp.269-
284. 2012, IF 2,006 (pe 2013), SRI 2,23607, ISSN 0968-090X.
http://www.sciencedirect.com/science/article/pii/S0968090X12001180
[3] L. Munteanu, V. Chiroiu, T. Sireteanu, On the response of small buildings to
vibrations, Nonlinear Dynamics, vol.73, issue 3, pp.1527-1543, 2013, IF
3,009 (pe 2013), SRI 1,99697, ISSN 0924-090X.
https://www.springer.com/pay+per+view?SGWID=0-1740713-3131-0-0
Unitatea Executiva pentru Finantarea Invatamantului Superior, a Cercetarii, Dezvoltarii si
Inovarii www.uefiscdi.gov.ro
[4] D. Dumitriu, L. Munteanu, C. Brisan, V. Chiroiu, R.V. Vasiu, O. Melinte, V.
Vlădăreanu, On the continuum modeling of the tire/ road dynamic contact, CMES:
Computer Modeling in Engineering and Sciences, vol. 94 (2), pp.159-173, 2013
IF 0,849 (pe 2013), ISSN 1526-1492.
http://www.techscience.com/doi/10.3970/cmes.2013.094.159.html
[5] L. Munteanu, V. Chiroiu, C. Brişan, D. Dumitriu, T. Sireteanu, S. Petre, On the
3D Normal Tire/off-road Vibro-Contact Problem with Friction, Mechanical Systems
and Signal Processing, 2014, ISSN: 0888-3270, IF 1,913 (pe 2013), SRI 2,668.
[6] L. Munteanu, C. Brişan, V. Chiroiu, D. Dumitriu, R. Ioan, Chaos-hyperchaos
Transition in a Class of Models Governed by Sommerfeld Effect, Nonlinear
Dynamics, 2014, ISSN 0924-090X, IF 3,009 (pe 2013), SRI 1,99697.
Unitatea Executiva pentru Finantarea Invatamantului Superior, a Cercetarii, Dezvoltarii si
Inovarii www.uefiscdi.gov.ro
Articole publicate în jurnale BDI (18)
[6] L. Vlădăreanu, V. Vlădăreanu, P. Schiopu, Hybrid Force-position Dynamic
Control of The Robots Using Fuzzy Applications, Applied Mechanics And
Materials Journal, Vol. 245, pp.15-23, 2013 ISSN 1662-7482.
[7] I. Girip, Şt. Donescu, M. Poienariu, L. Munteanu, On the Behaviour of the
Hysteretic Wire-rope Isolators under Random Excitation, Revue Roumaine
des Sciences Techniqués – Série de Mécanique Appliquée, 2013 ISSN: 0035-
4074.
[8] R.V. Vasiu, O. Melinte, V. Vlădăreanu, D. Dumitriu, On the Response of
the Car from Road Disturbances, Revue Roumaine des Sciences Techniqués –
Série de Mécanique Appliquée, 2013, ISSN: 0035-4074.
[9] L. Munteanu, I. Girip, V. Chiroiu, On the Tire/Road Elastic Contact, Acta
Technica Napocensis, Series: Applied Mathematics and Mechanics, Vol.56,
Issue IV, pp. 721-724, November 2013 (prezentata la ADEMS2013, Cluj-
Napoca, 24-25 Oct. 2013) ISSN 1221-5872.
Unitatea Executiva pentru Finantarea Invatamantului Superior, a Cercetarii, Dezvoltarii si
Inovarii www.uefiscdi.gov.ro
[10] D. Dumitriu, O. Melinte, V. Vlădăreanu, Half-car vertical dynamics
using CARSIM software, Acta Technica Napocensis, Series: Applied
Mathematics and mechanics, 56, IV, pp. 675-680, 2013, ISSN: 1221-5872.
[11] L. Munteanu, D.Dumitriu, V.Chiroiu, P.P.Delsanto, On the Contact
Interfaces between the Driver and the Vehicle Seat, SAE Int. J. Passeng.
Cars - Mech. Syst. 6(2), pp.636-642, 2013, ISSN 1946-4002
doi:10.4271/2013-01-0455 http://papers.sae.org/2013-01-0455.
[12] V. Vladareanu, G. Tont, L. Vladareanu, F. Smarandache, The
Navigation Of Mobile Robots In Non-stationary And Non-structured
Environments, Inderscience Publishers, Int. J. Advanced Mechatronic
Systems, Vol. 5, No. 4, 2013, pg.232- 243, ISSN 1756-
8412, Http://Www.Inderscience.Com/Jhome.Php?Jcode=ijamechs#authors
Unitatea Executiva pentru Finantarea Invatamantului Superior, a Cercetarii, Dezvoltarii si
Inovarii www.uefiscdi.gov.ro
Articole Prezentate/Publicate in Volumele Unor Conferinţe (Conference
Proceedings) (18)
[13] V. Chiroiu, L. Munteanu, T. Sireteanu, On the Response of Small
Buildings To Vibrations, 4th COMPDYN Conference, KOS Greece, June
12-14, 2013 Mini-symposium MS 29: “Accuracy and Computational
Efficiency in Dynamic/Seismic Structural Analysis”, 2013.
[14] L. Munteanu, V. Chiroiu, Haptic Rendering of Deformable Objects,
Cmh1: Computational Modeling of Haptics in Virtual Environments:
Taxonomy, Research Status, and Challenges, Kos, Greece, 15-17 June 2013.
[15] D. Dumitriu, O. Melinte, V. Vlădăreanu, Simularea Interactiunii
Verticale dintre autovehicul si drum folosind CARSIM, A 37-a Conferinţă
Naţională de Mecanica Solidelor, Acustică si Vibraţii CNMSAV XXXVII -
Vol. I, Chisinau, 6-8 Iunie 2013, pp. 81-87, ISBN 978-9975-4241-3-4.
Unitatea Executiva pentru Finantarea Invatamantului Superior, a Cercetarii, Dezvoltarii si
Inovarii www.uefiscdi.gov.ro
[16] C. Brişan, R.V. Vasiu, V. Chiroiu, D. Dumitriu, Avatar Models for Suspension
Mechanisms, International Conference On Innovative Technologies, IN-TECH
2013, Budapest, 10-12 Sept., 2013.
[17] L. Munteanu, T. Sireteanu, C. Brişan, V. Chiroiu, On the Sommerfeld Effects
with Application to Mechanics, Proceedings of The International Conference of
Mechanical Engineering ICOME 2013 Craiova 16-17 Mai 2013, Tome 1,
pp.177-182, 2013.
[18] C. Brişan, P. P. Teodorescu, D. Dumitriu, V. Moşnegutu, On the Identification
of Nonlinear Boundary Conditions by Using the Concept of The Interference
Distance, Proceedings of the International Conference of Mechanical Engineering
ICOME 2013 Craiova 16-17 Mai 2013, Tome 1, pp.171-176, 2013.
[19] O. Melinte, D. Dumitriu, CARSIM Software Simulations of Half-car Vertical
2D Dynamics and Vehicle Suspension Behavior, Annual Symposium of The
Institute of Solid Mechanics SISOM 2013, Bucureşti, 21-22 Mai 2013.
Unitatea Executiva pentru Finantarea Invatamantului Superior, a Cercetarii, Dezvoltarii si
Inovarii www.uefiscdi.gov.ro
[20] C. Brişan, C. Boanţă, M. Popa, R.V. Vasiu, Mechanical Structures used for
Driving Simulators, XXVII Microcad International Scientific Conference, CD
Proceedings, Miskolc, 2013.
[21] D. Dumitriu, C. Brişan, L. Munteanu, Influence of Real Car Longitudinal
Acceleration Regime on the Vertical Vibrations of a Dynamic Car Simulation,
ASME 2014 12th Biennial Conference on Engineering Systems Design and
Analysis ESDA2014 June 25-27, 2014, Copenhagen, Denmark, Paper
ESDA2014-20413.
[22] C. Lăpuşan, V. Chiroiu, L. Munteanu, L. Bara, C. Brişan, Development of an
Avatar for a Car with Independent Suspensions, 2014 IEEE International
Conference on Automation, Quality And Testing, Robotics AQTR 2014- THETA
19th Edition –May 22-24 2014 Cluj-Napoca (Best Paper Award 2014).
[23] D. Dumitriu, I. Stroe, Symplectic Runge-Kutta-Nystrom Integration of Rigid
Body Attitude, 2nd International Workshop on Numerical Modelling In Aerospace
Sciences, NMAS 2014, CD ISSN 2360–1809, ISSN l2360–1809 7-8 May 2014,
Bucharest.
Unitatea Executiva pentru Finantarea Invatamantului Superior, a Cercetarii, Dezvoltarii si
Inovarii www.uefiscdi.gov.ro
[24] C. Brişan, C. Lăpuşan, V. Chiroiu, L. Munteanu, D. Dumitriu, Aspects
concerning development of reconfigurable driving simulators, 2014 IEEE
International Conference on Automation, Quality and Testing, Robotics AQTR
2014- THETA 19th Edition –May 22-24 2014 Cluj-Napoca
[25] D. Dumitriu, C. Lala, D. Baldovin, On the acceleration regimes of a
Thomson linear motion actuator used as vibrations generator in the 1-3 Hz
frequency range – Technical paper, Simpozionul Anual al Institutului de
Mecanica Solidelor SISOM 2014, 22-23 Mai 2014, Bucureşti.
Capitol Carte Springer (1)
[26] R.V. Vasiu, L.Munteanu, C. Brisan, Developing an Avatar Model for
Driving, Intelligent Distributed Computing VII Studies In Computational
Intelligence, Vol. 511, pp.233-242, 2013 ISSN 1860-949x
Http://Link.Springer.Com/Chapter/10.1007%2f978-3-319-01571-2_28#page-1
Unitatea Executiva pentru Finantarea Invatamantului Superior, a Cercetarii, Dezvoltarii si
Inovarii www.uefiscdi.gov.ro
Deplasări la conferinte si seminarii de lucru (11)
1. Seminar de lucru 8-10 Oct. 2012. A participat Prof. Alexander Verl de la
Institut Für Steuerungstechnik Der Werkzeugmaschinen und
Fertigungseinrichtungen, Stuttgart.
2. Stagiu de cercetare Politecnico Di Torino (L.Munteanu 16 August – 7
Sept. 2012).
3. Stagiu de cercetare Universitatea Stuttgart (C.Brişan 20 Octombrie – 2
Noiembrie 2012).
4. L. Munteanu, V. Chiroiu 11-18 Iunie 2013 Kos, COMPDYN 2013 4th
International Methods in Structural Methods in Structural Dynamics and
Earthquake Engineering şi Workshop CMH1-Computational Modeling of
Haptics in Virtual Environments: Taxonomy, Research Status, and
Challenges, 11-18 Iunie, Kos, Greece 2013. Au fost prezentate comunicările
[13] şi [14].
5. D. Dumitriu şi doctoranzii O. Melinte, V. Vlădăreanu Chişinău 5-9 iunie
2013 A 37-a Conferinţă Naţională de Mecanica Solidelor, Acustică şi
Vibraţii CNMSAV XXXVII. D. Dumitriu a prezentat lucrarea [15].
Unitatea Executiva pentru Finantarea Invatamantului Superior, a Cercetarii, Dezvoltarii si
Inovarii www.uefiscdi.gov.ro
6. R.V. Vasiu 20-24 martie la Miskolc, Ungaria Microcad International
Scientific Conference organizata de Universitatea din Miskolc. A prezentat
lucrarea [16].
7. L. Munteanu, V. Chiroiu, D. Dumitriu şi doctorandul V. Vlădăreanu Cluj-
Napoca 23-25 oct., 4th International Conference on Advanced Engineering in
Mechanical Systems-ADEMS2013 pentru prezentarea lucrării [9] si Seminar de
Lucru la Universitatea Tehnică din Cluj-Napoca - articole [3, 4, 5].
8. C. Brişan Institutul de Mecanica Solidelor 10-12 oct. 2013 Seminar de lucru
intitulat: “Cercetări avansate în domeniul mecanicii reconfigurabile”.
9. D. Dumitriu, ASME 2014 12th Biennial Conference on Engineering Systems
Design and Analysis ESDA2014 June 25-27, 2014, Copenhagen, Denmark,
Paper ESDA 2014-20413- prezentare articol [21].
10. C. Brişan, IEEE International Conference On Automation,
Quality And Testing, Robotics AQTR 2014- THETA 19th Edition -May 22-24
2014 Cluj-Napoca, prezentare articole [22, 24].
11. D. Dumitriu, 2nd International Workshop on Numerical Modelling In
Aerospace Sciences, NMAS 2014, 7-8 May 2014, Bucharest, prezentare lucrare
[23].
Unitatea Executiva pentru Finantarea Invatamantului Superior, a Cercetarii, Dezvoltarii si
Inovarii www.uefiscdi.gov.ro
6. Implicarea doctoranzilor Doctoranzii au participat la activităţile etapei, corelând activităţile proiectului cu
obiectivele tezelor de doctorat şi publicând din rezultatele obţinute [1, 3-6, 8, 12,
15, 16, 19,20,24].
In 2014 doi doctoranzi isi sustin tezele de doctorat
Victor Vlădăreanu, Contribuţii la controlul inteligent al roboţilor autonomi
folosind senzori optici, Coordinator ştiinţific Prof. Dr. Ing. Paul Schiopu,
Universitatea Politehnica din Bucureşti (octombrie 2011 - septembrie 2014).
Octavian Melinte, Studii şi cercetări experimentale privind controlul sistemelor
mecanice de poziţionare de mare precizie, Coordinator ştiinţific dr. L.Vlădăreanu,
Institutul de Mecanica Solidelor, Bucureşti (noiembrie 2009 - septembrie 2014).
Unitatea Executiva pentru Finantarea Invatamantului Superior, a Cercetarii, Dezvoltarii si
Inovarii www.uefiscdi.gov.ro
8. Impactul rezultatelor Rezultatele obtinute conduc la realizarea unui produs original - prototip experimental reconfigurabil al unui simulator al raspunsului drumului la actiunea autovehicului (acronim HD RoReSi) cu potential de piata.
Produsul vizeaza performanta autovehiculelor (comfort, calificari dinamice) cresterea gradului de constientizare si de siguranta auto, descresterea accidentelor in trafic si respectiv, reducerea costurilor de intretinere. Calitatea, costul si flexibilitatea fac diferenta dintre noul produs si ofertele existente ale principalilor concurenti pe plan mondial. Prin prelucrarea cunostintelor avansate din domeniul hapticii pe computer (analog graficii pe computer) si din aria colaborarii inteligente dintre om si masina, proiectul este o provocare pentru viitor atat in haptica cat si in simularea drumului, fara medii virtuale scumpe si fara putere costisitoare de calcul.
Unitatea Executiva pentru Finantarea Invatamantului Superior, a Cercetarii, Dezvoltarii si
Inovarii www.uefiscdi.gov.ro
Conceptele au fost introduse in scopul depasirii limitarilor curente din
domeniu (simularea drumului, contact cauciuc-drum, modelarea suspensiei si
respectiv, incorporarea hapticii in mediul virtual).
In plus, proiectul genereaza cunostinte si rezultate stiintifice de interes pentru alt
proiect si anume
Proiectul FP7-PEOPLE-2012-IRSES - project no. 318902
(2013 - 2016)
Title: Real-time Adaptive networked control of rescue robots
Project Manager IMSAR: Dr. Luige Vladareanu
Unitatea Executiva pentru Finantarea Invatamantului Superior, a Cercetarii, Dezvoltarii si
Inovarii www.uefiscdi.gov.ro
9. Concluzii Toate obiectivele au fost realizate in termenul prevazut la contractare.
In urma evaluarii calificativul obtinut este A+
Best Paper Award
[23] la IEEE Int.
Conference on
Automation,
Quality and Testing
, Robotics AQTR
2014- THETA
19th Edition -May
22-24 2014 Cluj-
Napoca.
Unitatea Executiva pentru Finantarea Invatamantului Superior, a Cercetarii, Dezvoltarii si
Inovarii www.uefiscdi.gov.ro
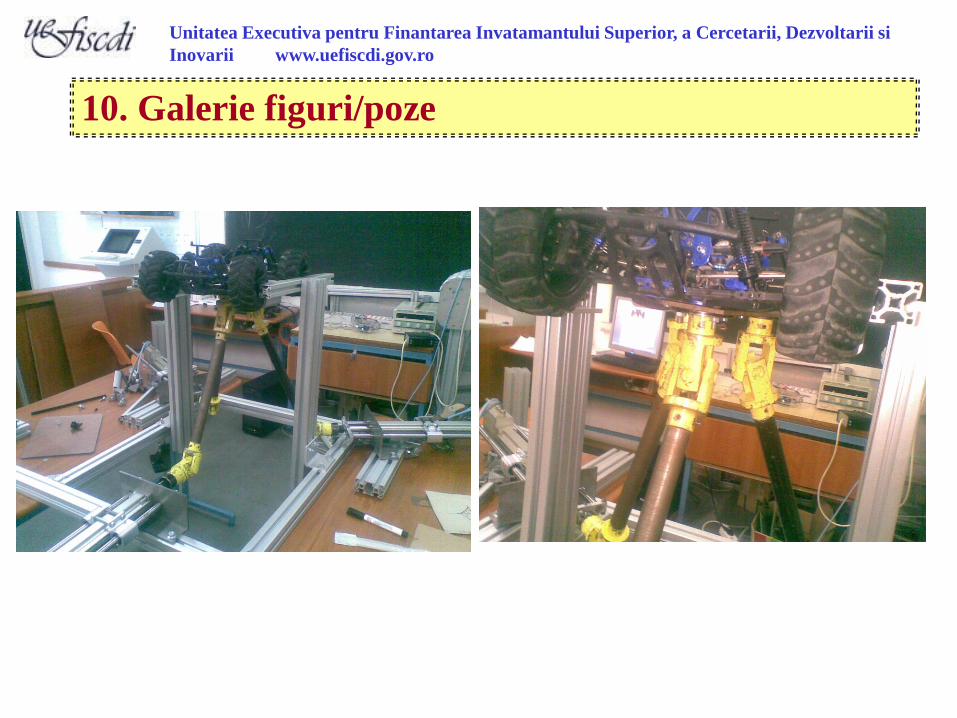
10. Galerie figuri/poze
Unitatea Executiva pentru Finantarea Invatamantului Superior, a Cercetarii, Dezvoltarii si
Inovarii www.uefiscdi.gov.ro

Unitatea Executiva pentru Finantarea Invatamantului Superior, a Cercetarii, Dezvoltarii si
Inovarii www.uefiscdi.gov.ro
Virtu
al mo
del (SIM
ULA
TION
AV
ATA
R)
develo
pm
ent
Pro
toty
pe
(DR
IVIN
G S
IMU
LATO
R)
dev
elo
pm
ent
System sim
ulatio
n/o
ptim
ization P
roto
typ
e te
stin
g/o
pti
miz
atio
n
System integration
Simulator subsystem development
Requiremenst – DRIVING SIMULATOR
DRIVING SIMULATOR
O
zy
x
A2
A4
car body
{T1}
front left suspension
rear left suspension
rear right suspensionfront right
suspension
A3
{T3}
{T4}
{T2}
Road
steering mechanism
power train
Unitatea Executiva pentru Finantarea Invatamantului Superior, a Cercetarii, Dezvoltarii si
Inovarii www.uefiscdi.gov.ro
Unitatea Executiva pentru Finantarea Invatamantului Superior, a Cercetarii, Dezvoltarii si
Inovarii www.uefiscdi.gov.ro
Unitatea Executiva pentru Finantarea Invatamantului Superior, a Cercetarii, Dezvoltarii si
Inovarii www.uefiscdi.gov.ro
Unitatea Executiva pentru Finantarea Invatamantului Superior, a Cercetarii, Dezvoltarii si
Inovarii www.uefiscdi.gov.ro
Unitatea Executiva pentru Finantarea Invatamantului Superior, a Cercetarii, Dezvoltarii si
Inovarii www.uefiscdi.gov.ro
Unitatea Executiva pentru Finantarea Invatamantului Superior, a Cercetarii, Dezvoltarii si
Inovarii www.uefiscdi.gov.ro
Unitatea Executiva pentru Finantarea Invatamantului Superior, a Cercetarii, Dezvoltarii si
Inovarii www.uefiscdi.gov.ro
Unitatea Executiva pentru Finantarea Invatamantului Superior, a Cercetarii, Dezvoltarii si
Inovarii www.uefiscdi.gov.ro
Unitatea Executiva pentru Finantarea Invatamantului Superior, a Cercetarii, Dezvoltarii si
Inovarii www.uefiscdi.gov.ro
Unitatea Executiva pentru Finantarea Invatamantului Superior, a Cercetarii, Dezvoltarii si
Inovarii www.uefiscdi.gov.ro
Multumim pentru atentie !