LUCRARE DE LICENT¸A˘acse.pub.ro/wp-content/uploads/2013/07/thesis1.pdf · 2. Metode pentru...
39
Universitatea Politehnica Bucure¸ sti Facultatea de Automatic˘ a si Calculatoare Departamentul de Automatic˘ a¸ si Ingineria Sistemelor LUCRARE DE LICEN ¸ T ˘ A Localizarea vorbitorului folosind microfoane multiple Absolvent Alexandru Ovidiu-Marius Coordonator Prof. dr. ing. Bogdan Dumitrescu Bucure¸ sti, 2013
Transcript of LUCRARE DE LICENT¸A˘acse.pub.ro/wp-content/uploads/2013/07/thesis1.pdf · 2. Metode pentru...
Universitatea Politehnica BucurestiFacultatea de Automatica si Calculatoare
Departamentul de Automatica si Ingineria Sistemelor
LUCRARE DE LICENTA
Localizarea vorbitorului folosind microfoanemultiple
AbsolventAlexandru Ovidiu-Marius
CoordonatorProf. dr. ing. Bogdan Dumitrescu
Bucuresti, 2013
Cuprins
1. Introducere 11.1. Scopul lucrarii . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2. Aplicat, ii . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2.1. Încadrare in ICA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.3. Problema Direction Of Arrival(DOA) . . . . . . . . . . . . . . . . . . . . . . . . . 1
2. Metode pentru estimarea DOA 22.1. Geometria arrayului . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22.2. Clasificarea metodelor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42.3. Calculul Matricei de Covariant, a . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.4. Metode neparametrice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.4.1. Beamforming . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62.4.2. Capon . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.5. Metode parametrice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82.5.1. ESPRIT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92.5.2. MUSIC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.6. Extindere pentru semnale de banda larga . . . . . . . . . . . . . . . . . . . . . . 122.6.1. Separare prin Short Time Fourier Transform . . . . . . . . . . . . . . . . 12
3. Analiza performant,elor în simulare 153.1. Limita Cramer-Rao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153.2. Estimarea numarului de surse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153.3. Toolbox Matlab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163.4. Simulare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.4.1. Semnale monofrecvent, iale . . . . . . . . . . . . . . . . . . . . . . . . . . . 183.4.2. Semnale multifrecvent, iale . . . . . . . . . . . . . . . . . . . . . . . . . . . 213.4.3. Înregistrari . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
4. Dezvoltarea placii de achizit, ie 274.1. Filtrarea Analogica - placut,a micampx8 . . . . . . . . . . . . . . . . . . . . . . . 274.2. Filtrare Digitala . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 284.3. Downsampling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 284.4. LabView . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
4.4.1. Placa NI 7833R . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
5. Rezultate s, i Concluzii 305.1. Rezultate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 305.2. Concluzii . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
5.2.1. Direct, ii viitoare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
Anexe 36
A. Notat, ii 36
ii
1. Introducere
1.1. Scopul lucrarii
Scopul lucrarii de fat, a este elaborarea s, i implementarea unei metode simple si rapide pentrugasirea sursei unui semnal acustic, fie vocal, instrument etc.
Acest domeniu de cercetare a prezentat interes inca de la inceputul secolului trecut, astfelca in timp au fost elaborate multe metode, de obicei cu obiective diferite. Spre exemplu, neputem dori sa putem estima doar direct,ia de la care vine semnalul, neinteresându-ne sau fiindcunoscute deja proprietat, ile spectrale ale acestuia. Sau ne dorim o filtrare, lasând doar semnalelecare vin dintr-o anumita direct, ie.
1.2. Aplicat, ii
Primele aplicat, ii au fost in domeniul militar. Au fost concepute sisteme de localizare pentruaviat, ie. Acum aceste tehnici sunt folosite cu preponderent, a in routere wireless si telefoanemobile, sub forma de antene inteligente, care pot filtra doar semnalele utile. Spre exemplu, untelefon mobil poate filtra doar semnalele venite de la ret,eauna de telefonie in care este inregistrat,celelalte fiind considerate „zgomot“.
1.2.1. Încadrare in ICA
Independent Component Analysis este un domeniu foarte activ. Obiectivul acestei cercetari estesepararea surselor de semnal una de cealalta. Spre exemplu, o persoana cânta la un instrumentiar alta din voce. Des, i sunt folosite de obicei filtrari in funct, ie de spectrul semnalelor( spreexemplu modelul vocii umane fat, a de un instrument muzical), estimarea direct, iei poate fi deajutor, realizând o filtrare in spatiu, posibil crescand performant,ele totale obt, inute.
1.3. Problema Direction Of Arrival(DOA)
Estimarea direct, iei din care provine un semnal are doua cazuri distincte. Împart, irea se facedupa distant,a intre sursa s, i elementele de masura( microfoane). Astfel avem:
• cazul nearfield: estimam distanta, elevat, ie si azimut. Sursa de semnal se afla la o distantadiferita de fiecare microfon, iar unda emanata de aceasta este o unda sferica.
• cazul farfield: În acest caz, sursa se considera a fi la o distant, a de microfoane care tindela infinit. Din acest motiv, unda este considerata a fi o unda planara. În acest cazsingurul parametru care trebuie estimat este unghiul incident al undei asupra grupului demicrofoane, numit Direction of Arrival(DOA).
In studiul de fat, a ne vom rezuma la estimarea DOA.
1

2. Metode pentru estimarea DOA
Problema de fat, a poate fi privita ca una de estimare a distribut, iei energiei in spat, iu. Pot figasite similitudini cu problema estimarii spectrale temporale, as,adar aceasta problema poatefi considerata „o problema de estimare spat, iala“. Marea majoritate a metodelor de estimaretemporala pot fi adaptate pentru problema estimarii spat, iale. Dintre aceastea, ma voi rezumadoar la cateva, prezentate in acest capitol.
Înainte, insa, de a prezenta metodele, voi face o trecere in revista a câtorva informat, iipreliminare.
Semnalul analizat este un semnal audio in spectrul vocii umane, as,adar in gama [0; 4000]Hertz. Important,a acestei alegeri devine evidenta în sect, iunea urmatoare, unde prezint construct, iaarrayului.
2.1. Geometria arrayului
Cea mai populara geometrie este cea numita Uniform Linear Array - ULA. Aceasta face cel maiusor adaptarea metodelor temporale pentru cazul spat, ial. Aceasta consta in as,ezarea microfoa-nelor intr-o linie, la distant, a egala unul fat, a de celalalt. Aceasta as,ezare face evidenta legaturacu cazul estimarii spectrale temporale. Consideram cazul urmator: o sursa de semnal se aflaîntr-o pozit, ie coliniara cu microfoanele din array. Pentru un singur „snapshot“ spat, ial, avemcâte un es,antion de la fiecare microfon. Fiind amplasate la o anumita distant, a unul fat, a decelalalt, acestea vor înregistra semnalul cu un us,or defazaj, ca in cazul în care ar fi es,antionatun singur microfon la intervale de timp egale. Ne vom baza pe aceasta analogie în adaptarea siimplementarea metodelor, dar s, i în alegerea distant,ei între microfoane.
Fie semnalul s(t) incident asupra arrayului. Ies, irea acestuia va fi urmatoarea:
y(t) = a(θ)s(t) + e(t) (2.1)
Unde:y(t) =
[y1(t) y2(t) . . . ym(t)
]Teste vectorul ies, irilor arrayului.
e(t) =[e1(t) e2(t) . . . em(t)
]Teste zgomotul adit, ional.
a(θ) =[1 e−iωcτ2 . . . e−iωcτm
]T(2.2)
este vectorul de direct, ie.
Figura 2.1 prezinta structura tipica pentru un ULA cu 8 canale. Se poate observa cum θinfluenteaza întârzierea τ pentru fiecare microfon.
Vectorul a(θ) cont, ine informat, ii despre unghi, despre frecvent,a semnalului dar s, i desprearray. Varianta simplificata in (2.2) face urmatoarele presupuneri: cele m microfoane sunt„calibrate“, adica toate au aceeasi funct, ie de transfer. În al doilea rând, semnalul s(t) este de
2

Capitolul 2. Metode pentru estimarea DOA
Figura 2.1.: Un ULA cu 8 microfoane
banda îngusta, având pulsat, ia ωc. În sfârs, it, τk este întârzierea pentru microfonul k fat, a de„primul“(ales arbitrar). Microfoanele sunt amplasate într-o linie, cu distant,a l intre fiecare douamicrofoane alaturate, as,adar întârzierea τk poate fi calculata cu urmatoarea formula:
τk = (k − 1) l sin (θ)c
(2.3)
unde
• l este distant,a între microfoane,
• θ este unghiul semnalului incident,
• c este viteza semnalului în mediu. În cazul nostru, c este viteza sunetului in aer, de340.29m/s.
Întroducând Ecuat,ia(2.3) in Ecuat,ia(2.2) obt, inem:
a(θ) =[1 e−iωcl sin(θ)/c . . . e−i(m−1)ωcl sin(θ)/c
]T(2.4)
Putem definifs = fc
l sinθ
c= l sinθ
λ
s, i
ωs = 2πfs = ωcl sinθ
c(2.5)
Din (2.5) putem rescrie vectorul de direct, ie:
a(θ) =[1 e−iωs e−i2ωs . . . e−i(m−1)ωs
]T(2.6)
Unde ωs este numita frecvent,a spat,iala.
3

Capitolul 2. Metode pentru estimarea DOA
Generalizând (2.1) pentru cazul in care avem n surse, obt, inem:
y (t) = [a (θ1) . . . a (θn)]
s1 (t)...
sn (t)
+ e (t) = As (t) + e (t) (2.7)
Alegerea distant,ei l este o alegere la fel de importanta ca s, i alegerea perioadei de es,antionarein cazul estimarii spectrale temporale. Mai mult, legea lui Shannon poate fi extinsa pentru cazulestimarii spat, iale:
fe > 2fc (2.8)
Lungimea de unda λ = cfc
. În cazul nostru, l = cfe
. Împart, ind (2.8) prin c, obtinem
1l>
2λ
As,adar
l <λ
2 (2.9)
sau
l
λ= d <
12
Respectând (2.9), putem alege l. Frecvent,a maxima a semnalului este de 4000 Hertz, culungimea de unda lambda = 8, 51cm, as,adar stabilim l = 4cm.
2.2. Clasificarea metodelor
În timp, au fost dezvoltate numeroase metode pentru estimarea DOA. În funct, ie de aplicat, ie,acestea au ca scop fie doar detect, ia unei surse de semnal, estimarea unghiului si frecvent,eiacestuia, sau separarea anumitor parametri din es,antioane.
În general, clasificarea metodelor pentru semnale de banda îngusta face uz de doua catego-rii: metode neparametrice s, i metode parametrice. Metodele moderne sunt bazate in general pecautari pentru minimizarea unor norme. Acestea nu mai intra clasificarea aceasta. În aceastasect, iune vor fi prezentate câteva exemple de algoritmi din fiecare categorie.
Metode alternative
O direct, ie recenta în estimarea DOA este cea bazata pe minimizarea unei norme folosind otehnica de cautare. În general aceste metode au precizie mai buna, dar dezavantajul este canecesarul de calcul este mult mai mare, iar în anumite situat, ii, cum ar fi zgomot mare sau ecouri,devin neaplicabile.
4

Capitolul 2. Metode pentru estimarea DOA
2.3. Calculul Matricei de Covariant, a
Toate metodele prezentate se bazeaza pe calculul matricei de covariant, a, R. Aceasta matricenu poate fi determinata exact din numarul finit de date, astfel ca se face apel la o estimare aacesteia:
R = 1N
N∑t=1
y (t) y∗ (t) (2.10)
Având in vedere faptul ca y este de dimensiune m × 1 si contine un singur „snapshot“,putem considera ca setul de date este ordonat intr-o matrice Y ∈ Rm×N . Astfel ca putem rescrie(2.10) în felul urmator:
R = 1NY Y ∗ (2.11)
2.4. Metode neparametrice
Metodele neparametrice pentru estimarea DOA au caracteristic faptul ca nu iau in considerareo anumita structura pentru matricea de covariant, a. De aceea pot fi considerate „neparametrice“.
Punctul de plecare pentru metodele neparametrice este gasirea unui filtru spat,ial h, careare urmatoarele caracteristici:
• trece nedistorsionate semnalele venite de la un anumit unghi, θ.
• atenueaza semnalele venite din oricare alta direct, ie.
Astfel:
yF (t) = h∗y (t) (2.12)
Iar puterea semnalului filtrat spat, ial:
E{∣∣∣yF (t)2
∣∣∣} = h∗Rh (2.13)
undeR = E {y (t) y∗ (t)}
Introducând (2.1) in (2.12) obt, inem:
yF (t) = [h∗a (θ)] s (t) (2.14)
Modul în care este gasit filtrul h constituie diferent,a intre metodele Beamforming si Capon.
5

Capitolul 2. Metode pentru estimarea DOA
2.4.1. Beamforming
Metoda Beamforming este corespondentul direct al periodogramei Blackman-Tukey din estima-rea spectrala temporala. Este considerata in general ca fiind prima incercare in domeniu, fiindde as,teptat ca rezultatele obtinute sa nu fie foarte precise. Are caracteristic faptul ca in jurulpunctului unde este estimata sursa se formeaza un „lob“.
Prima condit, ie impusa filtrului este realizata de:
h∗a(θ) = 1 (2.15)
Din (2.2) putem observa caa∗(θ)a(θ) = m (2.16)
Solut, ia data in cazul Beamforming este data de filtrul:
h = a(θ)a∗(θ)a(θ) (2.17)
Folosing (2.16) obt, inem:
h = a(θ)m
(2.18)
Iar estimarea de putere din (2.13) devine:
E{∣∣∣yF (t)2
∣∣∣} = a∗(θ)Ra(θ)m2 (2.19)
As,adar, putem stabili o metoda pentru estimarea DOA folosind Beamforming: prin „sca-narea“ selectiva a fiecarui unghi, putem stabili puterea semnalului de la acel unghi. Punctul incare puterea este mai mare, constituie unghiul de la care vine semnalul.
Algoritmul 2.1 prezinta pas, ii pentru aceasta metoda, iar Figura 2.2 un rezultat tipic încazul unei singure surse monofrecvent, iale. De observat faptul ca aceasta metoda formeaza un„lob“ in jurul punctului unde se afla sursa. Unghiul DOA = 27◦ este estimat corect.
Algoritm 2.1: BeamformingInput: Y ∈ Rm×N matricea masuratorilor; L rezolutia doritaOutput: Φ ∈ RL×1 vectorul de estimari spectrale
1 R← Y Y ∗/N ;2 for i ∈ [0;L− 1] do3 θi = −π
2 + πL (i− 1);
4 Φ(θi) = a∗(θ)Ra(θ)m2
5 end
2.4.2. Capon
Metoda Capon face separarea intr-un mod mai corect, astfel ca „lobul“ este inlocuit de un vârfveritabil.
6

Capitolul 2. Metode pentru estimarea DOA
Figura 2.2.: Rezultat Beamforming cu DOA = 27◦, formând „lobul“ caracteristic
Spre deosebire de Beamforming, filtrul dat de metoda Capon este
h = R−1a(θ)a∗(θ)R−1a(θ)
(2.20)
S, i estimarea de putere din (2.13) este:
E{∣∣∣yF (t)2
∣∣∣} = 1a∗(θ)R−1a(θ)
(2.21)
As,adar, ca s, i pentru metoda Beamforming putem stabili un algoritm similar in care scanamtot domeniul, cautând valorile cele mai mari pentru estimarea de putere.
Algoritmul 2.2 prezinta pas, ii pentru aceasta metoda, iar Figura 2.3 un rezultat tipic încazul unei singure surse monofrecvent, iale. Fat, a de cazul precedent, estimarea este mult maiprecisa, fiind prezent un vârf pentru Unghiul DOA = 27◦.
Algoritm 2.2: CaponInput: Y ∈ Rm×N matricea masuratorilor; L rezolutia doritaOutput: Φ ∈ RL×1 vectorul de estimari spectrale
1 R← Y Y ∗/N ;2 for i ∈ [0;L− 1] do3 θi = −π
2 + πL (i− 1);
4 Φ(θi) = 1a∗(θ)R−1a(θ)
5 end
Figura 2.3.: Rezultat Capon cu DOA = 27◦
7

Capitolul 2. Metode pentru estimarea DOA
2.5. Metode parametrice
Fat, a de metodele neparametrice, acest set de algoritmi se foloses,te de structura matricei decovariant, a R. Din (2.7) putem extrage modelul general pentru matricea R. S, tiind ca zgomotuladit, ional este de tip zgomot spat,ial alb avem:
E {e(t)e∗(t)} = σ2I
unde σ este variant,a zgomotului, util in calculul SNR - Signal to Noise Ratio.
Notand matricea de covariant,a a semnalului cu P :
P = E {s(t)s∗(t)}
Obt, inem modelul general pentru matricea R
R = E {y(t)y∗(t)} = APA∗ + σ2I (2.22)
De notat faptul ca matricea P trebuie sa fie nesingulara, dar nu neaparat diagonala. CandP nu este diagonala, semnalele sunt part,ial corelate, iar când aceasta este singulara semnalelesunt coerente.
Subspat, iul semnalului si subspat, iul zgomotului
Cunoscând structura matricei de covariant, a R, ne putem folosi de ea in estimare. Informat, ii utilese afla „ascunse“ in valorile proprii ale acesteia. De notat este faptul ca numarul de microfoanem trebuie sa fie mai mare decat cel al surselor de semnal n în acest caz. Motivul este ca fiecarevaloare proprie a lui R corespunde unei surse de semnal. Valorile proprii mai mari corespundsurselor utile, iar cele mici pentru zgomot.
Notam λ1 > λ2 > . . . > λm valorile proprii ale lui R. S, tiind ca
rang(APA∗) = n (2.23)
constatam ca APA∗ are n valori proprii pozitive, restul fiind 0. Din modelul prezentat in (2.22)stabilim ca
λk = λk + σ2 (k = 1..m) (2.24)
Unde λk sunt valorile proprii ale R si λk valorile proprii ale APA∗.
As,adar {λk > σ2 pentru k = 1..nλk = σ2 pentru k = n+ 1..m
În mod ideal, exista o diferent, a foarte mare între valorile proprii corespunzatoare surselorutile s, i cele corespunzatoare zgomotului, data de SNR. Însa, deoarece setul de date este limitat,si matricea de covariant, a R este diferita de R ideala, aceasta diferent, a scade. Acest lucru facedificila estimarea numarului surse n pentru metodele parametrice, acesta fiind de obicei furnizatca parametru la init, ializarea algoritmului. De asemenea, în cazul unor surse de semnal coerenterangul matricei R scade, de obicei insemnând ca estimarile date de metoda folosita in acest cazvor fi eronate.
8

Capitolul 2. Metode pentru estimarea DOA
În cele ce urmeaza, ne vom folosi de vectorii s, i valorile proprii ale matricei R. Fie {s1 . . . sn}vectorii proprii ortonormali asociat, i {λ1 . . . λn} si {g1 . . . gm−n} vectorii proprii ortonormaliasociat, i {λn+1 . . . λm}. Voi folosi ca notat, ie :
S = [s1 . . . sn] (m× n) , G = [g1 . . . gm−n] (m× (m− n))
• S matricea vectorilor proprii asociat, i surselor de semnal
• G matricea vectorilor proprii asociat, i zgomotului
2.5.1. ESPRIT (Estimation of Signal Parameters by Rotational InvarianceTechniques)
Metoda ESPRIT împarte arrayul în doua subarrayuri virtuale identice. Aceste subarrayuri potavea elemente comune, astfel ca putem alege numarul de elemente din fiecare m = m− 1.
Fie
A1 = [Im−1 0]A (m− 1)× n (2.25)A2 = [0 Im−1]A (m− 1)× n (2.26)
Se poate demonstra caA2 = A1D
unde
D =
e−iω1 0. . .
0 e−iωn
Care cont, ine informat, ii despre unghiurile {θi}ni=1 in frecvent,ele spat,iale ωi = ω(θi) as,a
cum au fost prezentate in (2.5).
Similar, putem produce o transformare asemanatoare cu (2.25) si (2.26):
S ← eigenvectors(R)S1 ← [Im−1 0]SS2 ← [0 Im−1]S
(2.27)
Pentru a obt, ineΦ =
(S∗
1 S∗1
)−1S∗
1 S∗2 (2.28)
Ecuat, ia poate fi rezolvata si prin aproximarea
S1Φ w S2 (2.29)
Φ s, i D au aceleasi valori proprii. Putem afla ωk = −arg(νk), unde {νk}nk=1 sunt valorileproprii ale lui Φ.
9

Capitolul 2. Metode pentru estimarea DOA
Algoritmul 2.3 prezinta pas, ii pentru aceasta metoda, iar Figura 2.4 un rezultat tipic încazul unei singure surse monofrecvent, iale. Spre deosebire de celelalte metode prezentate, metodaESPRIT estimeaza direct unghiul surselor.
Algoritm 2.3: ESPRITInput: Y ∈ Rm×N matricea masuratorilor; n numarul de surseOutput: θ ∈ Rn×1 vectorul de estimari DOA in radiani
1 R← Y Y ∗/N ;
2 J ←
0 . . . 0 10 . . . 1 0...
......
...1 . . . 0 0
(m×m);
3 R← 1/2(R+ JR∗J);4 S ← eigvectors(R);5 S1 ← [Im−1 0]S;6 S2 ← [0 Im−1]S;7 Φ = S1\S2;8 ν = eigvalues(Φ);9 θ = arcsin (−arg(ν/d/π/2));
theta = 26.9884
Figura 2.4.: Rezultat ESPRIT cu DOA = 27◦
Persimetricitatea lui R
Matricea R este o matrice Toeplitz. Deoarece setul de date disponibil este finit, s, i de obicei,relativ limitat, aceasta proprietate nu se pastreaza si in cazul lui R.
Se recomanda o transformare de „persimetrizare“( sau „centrosimetrizare“) a lui R, dupacum urmeaza
R← 1/2(R+ JR∗J)
unde
J ←
0 . . . 0 10 . . . 1 0...
......
...1 . . . 0 0
(m×m)
Aceasta transformare ofera rezultate mai bune în estimare, deoarece R se apropie maimult de matricea ideala de covariant, a R.
Aceasta imbunatat, ire este valabila pentru orice metoda care foloses,te modelul general(2.22).
10

Capitolul 2. Metode pentru estimarea DOA
2.5.2. MUSIC (Multiple Signal Classification)
Cea mai populara metoda pentru estimarea DOA este metoda MUSIC. Aceasta, ca s, i in cazulESPRIT, se bazeaza pe separarea subspat, iului semnalelor de cel al zgomotului. Spre deosebirede metoda precedenta, insa, se foloses,te de matricea G, care corespunde zgomotului.
Folosindu-ne de urmatoarea proprietate:
A∗G = 0 (2.30)
Care sugereaza faptul ca G apart, ine subspat, iului nul al lui A. Ne vom folosi de aceasta propri-etate pentru a scrie condit,ia de baza pentru MUSIC :
Valorile unghiurilor {θk}nk=1 sunt singurele solut,ii pentru ecuat,ia
a∗(θ)GG∗a(θ) = 0 (2.31)
Exista mai multe variante ale acestei metode, prezentata aici fiind cea de baza, numitas, i Spectral MUSIC, deoarece nu ofera valori efective pentru puterea semnalului, ci doar denotaprezent,a semalului intr-un unghi.
Algoritmul 2.4 prezinta pas, ii pentru aceasta metoda, iar Figura 2.5 un rezultat tipic încazul unei singure surse monofrecvent, iale. În acest exemplu, Unghiul DOA = 27◦ este estimatfoarte precis.
Algoritm 2.4: MUSICInput: Y ∈ Rm×N matricea masuratorilor; L rezolut, ia dorita; n numarul de surseOutput: Φ ∈ RL×1 vectorul de estimari spectrale
1 R← Y Y ∗/N ;
2 J ←
0 . . . 0 10 . . . 1 0...
......
...1 . . . 0 0
(m×m);
3 R← 1/2(R+ JR∗J);4 S ← eigvectors(R);
5 G←[
0n×m−nIm−n
]S;
6 for i ∈ [0;L− 1] do7 θi = −π
2 + πL (i− 1);
8 Φ(θi) = 1a∗(θ)GG∗a(θ)
9 end
Figura 2.5.: Rezultat MUSIC cu DOA = 27◦
11

Capitolul 2. Metode pentru estimarea DOA
2.6. Extindere pentru semnale de banda larga
Pana acum au fost prezentate metodele prin care pot fi estimate unghiurile DOA pentru unsemnal monofrecvent, ial( in (2.5) parametrul de interes este unghiul θ, restul valorilor fiindconsiderate constante, inclusiv ωc, pulsat, ia semnalului).
Ne propunem, insa, ca algoritmii sa ofere rezultate si pentru semnale cu o gama defrecvent,e mai bogata( sunet cu frecvent,e în gama [0; 4000] Hertz). Realizam acest lucru folosindu-ne de una dintre proprietat, ile metodei Short Time Fourier Transform, anume posibilitatea se-pararii frecvent,elor.
2.6.1. Separare prin Short Time Fourier Transform
Pentru a putea aplica metodele prezentate in acest capitol pentru cazul in care semnalele aumai mult de o frecvent, a in spectru, vom face o „separare“ a frecvent,elor, pastrând amplitudineas, i faza fiecarei frecvent,e. Acest lucru se poate realiza prin Short Time Fourier Transform.Dupa cum vom vedea, aici se vor stabili parametrii necesari pentru a putea realiza arrayulexperimental.
Sa luam cazul în care aplicam Fast Fourier Transform pe un vector y de es,antioane,stocând rezultatul intr-un vector W1. Ne intereseaza lungimea ferestrei si frecvent,a dees,antionare. Vom nota aces,ti parametri cu wlen (window length) si Fs. Consideram wlen caputere de 2.
Aplicand FFT pe o fereatra de dimensiune wlen, obt, inem in W1 valorile FFT pentruaceasta. Fiecare valoare intre 1 si wlen/2 cont, ine informat, ii despre frecvent,ele pozitive alesemnalului, grupate in elementele din W1, astfel:
W1(1) pentru frecvent,ele[0; Fs
wlen
]W1(2) pentru frecvent,ele
[Fswlen ; 2Fs
wlen
]...
W1(wlen/2) pentru frecvent,ele[
(wlen−1)Fs
wlen ; Fs2
]Aplicând FFT pentru mai multe ferestre, W2, W3, etc. obt, inem o serie de informat, ii
despre fiecare frecvent, a. Notam numarul de ferestre peste care aplicam FFT cu bins, si grupamintr-o matrice W :
W =
W1(1) W2(1) . . . Wbins(1)W1(2) W2(2) . . . Wbins(2)
W1(wlen) W2(wlen) . . . Wbins(wlen)
Pe linii sunt grupate es,antioanele pentru o singura grupa de frecvent,e. Spre exemplu, pe
prima linie din W sunt es,antioanele pentru frecvent,ele[0; Fs
wlen
]. Daca alegem wlen suficient de
mare, aceasta separare va fi foarte buna si putem considera o singura frecvent, a, Fs2wlen .
Astfel, putem alege din y, vectorul de es,antioane, doar o anumita frecvent, a, notata y(fi),unde fi este frecvent,a dorita. În cazul nostru, putem aplica aceasta metoda pe fiecare linie dinY (pentru fiecare microfon), astfel obt, inem un numar de matrice Y (fi), unde fi ∈ { Fs
2wlen ; . . . ; Fs2 −
Fs2wlen}.
12
Capitolul 2. Metode pentru estimarea DOA
Y cont, ine semnale monofrecvent, iale, astfel ca poate înlocui Y pentru aplicarea algoritmilorprezentat, i anterior.
Ca observat, ie, pentru obt, inerea de bins es,antioane in Y sunt necesare N = wlen ∗ binses,antioane in Y . Acest numar poate fi redus prin suprapunerea ferestrelor, explicat in sect, iuneaurmatoare.
Suprapunerea ferestrelor
Pentru marirea preciziei, s, i pentru a elimina „salturile“ amplitudinilor semnalelor, de obiceiferestrele W se suprapun cu un numar de es,antioane. În general, suprapunerea se face la jumatatedin dimensiunea unei ferestre. Cu cât se mares,te numarul de es,antioane care se suprapun, semareste precizia dar in acelas, i timp cres,te necesarul de prelucrare pentru un numar total fixatde es,antioane. În cazul nostru insa, deoarece ne dorim ca setul de date sa fie cât mai mic posibil,pentru a evita situat, ia în care semnalul îs, i modifica spectrul, acest lucru constituie un avantaj.Marind factorul de suprapunere la wlen− 1, sunt necesare doar N = wlen+ bins− 1 es,antioaneîn loc de wlen ∗ bins.
Tipul ferestrei
Putem folosi o fereastra de tip Gaussian, Hamming, Hanning etc. pentru a creste preciziaestimarilor.
Figura 2.6 prezinta cateva tipuri de ferestre. Motivul pentru care acestea ajuta la îm-bunatat, irea datelor este în afara scopului acestei lucrari, fiind prezentat pe larg în orice curs dePrelucrarea Semnalelor.
(a) Gaussian (b) Chebîshev
(c) Hamming (d) Hanning
Figura 2.6.: Exemple de ferestre pentru aplicarea FFT
13

Capitolul 2. Metode pentru estimarea DOA
Concluzie
În incheiere, din cele prezentate mai sus putem extrage inca o informat, ie utila pentru stabilireaexperimentului. Ne dorim o separare a frecvent,elor foarte buna, însemnând ca fiecare banda defrecvent,e trebuie sa fie compusa din cât mai put, ine frecvent,e reale. Calitatea acestei separarieste data de raportul ordinului FFT la Fs/2. În general o frecvent, a de es,antioare mai maredecât este necesar are influent, a doar asupra necesarului de calcul. În acest caz, însa, daca marimFs fixând wlen(ordinul FFT) va cres,te necesarul de calcul, dar va scadea precizia. Daca marimcorepunzator si wlen, pastrând calitatea separarii, atunci necesarul de calcul cres,te exponent, ial,fara a avea neaparat de câs,tigat în calitatea estimarii. În concluzie, frecvent,a de es,antionare Fstrebuie aleasa corespunzator aplicat, iei. Amintim faptul ca frecvent,a maxima este de 4000 Hertz,as,adar ne dorim o frecvent, a de es,antionare mai mare de 8000. Putem alege aceasta frecvent, a la8820, pentru a putea realiza o filtrare digitala si downsampling, cum va fi demonstrat ulterior.
14

3. Analiza performant,elor în simulare
În acest capitol propun evaluarea teoretica a fiecarui algoritm prezentat. Fiecare etapa va adaugaun nivel de complexitate pentru algoritm, acest lucru facând mai probabila posibilitatea aparit, ieiunor rezultate eronate.
Mai întâi voi prezenta limita teoretica a preciziei, limita Cramer-Rao ( Cramer-Rao Bo-und), doua metode pentru estimarea a priori a numarului de surse de semnal n, implementareain cod Matlab a algoritmilor si a funct, iilor de test.
3.1. Limita Cramer-Rao
Limita Cramer-Rao ne poate da o masura a preciziei care poate fi atinsa în estimare. Factoriicare influent,eaza sunt urmatorii:
• zgomotul, sau mai degraba SNR
• numarul de microfoane
var(φ) > 6σ2
|α|2N(N2 − 1)(kd)2sin2(φ)
Implicat, iile acestei ecuat, ii sunt:
• pe masura ce SNR scade, precizia scade
• pe masura ce N creste, precizia cres,te
• apertura arrayului, deschiderea acestuia, cres,te precizia pe masura ce creste numarul demicrofoane
• pe masura ce ne apropiem de marginea arrayului, adica unghiul incident se departeaza de0, scade precizia
3.2. Estimarea numarului de surse
Acest lucru este important mai ales in cazul metodelor parametrice, unde trebuie separatsubspat, iul semnalului de cel al zgomotului. Daca se face o estimare gresita, vor fi obtinut,erezultate posibil gres, ite.
Spre exemplu, metoda ESPRIT ofera rezultate gres, ite daca numarul de surse estimat estesub cel real, dar obt, ine rezultate corecte daca acesta este supraestimat. În schimb, vor apareasurse parazite care provin din subspat, iul zgomotului s, i care trebuie eliminate, dar nu am gasito metoda „sigura“ cu care se poate face acest lucru doar analizând rezultatele obt, inute de laESPRIT.
MUSIC este mai robust in aceasta privinta, dar pot aparea probleme daca numarul desurse este subestimat.
15

Capitolul 3. Analiza performant,elor în simulare
Voi prezenta doua metode pentru determinarea numarului de surse, care din pacate potoferi rezultate diferite, as,adar nu sunt precise.
Metodele se bazeaza pe faptul ca in cazul ideal, valorile proprii asociate zgomotului suntegale. Des, i în cazul real nu este cazul, ele sunt apropiate ca valoare. Astfel ca, calculând„distant,a“ între acestea putem da o aproximare a numarului de surse.
Wax si Kailath definesc doua criterii pentru aceasta estimare. Prima se numeste AkaiakeInformation Criterion ( AIC) iar cea de-a doua Minimum Description Length( MDL).
L(d) = −K(N − 1)log
[∏N
n=d+1 λn]1/(N−d)
1N−d
∑Nn=d+1 λn
AIC(d) = L(d) + d(2N − d)
AIC(d) = −K(N − d)log
[∏N
n=d+1 λn]1/(N−d)
1N−d
∑Nn=d+1 λn
+ d(2N − d)
MDL(d) = L(d) + 12d(2N − d)logK
MDL(d) = −K(N − d)log
[∏N
n=d+1 λn]1/(N−d)
1N−d
∑Nn=d+1 λn
+ 12d(2N − d)logK
Des, i au fost prezentate câteva solut, ii pentru problema estimarii numarului de surse,aceasta ramane o problema deschisa. Literatura de specialitate se feres,te in general sa ofereo solutie considerata definita, pentru ca nu exista una.
Acest lucru nu este in general o problema, deoarece fie putem considera numarul de sursen cunoscut de la început, fie putem „încerca“ mai multe valori. Prima solut, ie ar putea, insa,degrada rezultatele in cazul in care operatorul nu ia in considerare efecte cum ar fi ecourilesau reverberat, iile produse de peret, i, sau chiar surse de zgomot parazite aflate in vecinatateaansamblului de microfoane, cum ar fi un ventilator de PC.
O solut, ie „naiva“ ar fi numararea „vârfurilor“ formate prin aplicarea unei metode nepa-rametrice, cum ar fi Capon, care nu necesita furnizarea lui n. Des, i aceasta solut, ie ar putea fiatragatoare la prima vedere, sufera de aceleas, i pericole ca s, i cele enumerate mai sus, astfel caintr-un singur „vârf“ sa se afle in realitate doua surse, as,a cum va fi prezentat intr-o sect, iuneulterioara, în care va fi facuta o analiza mai detaliata a fiecarei metode.
Problema aflarii numarului de surse ramâne una greu de rezolvat in contextul estimariispat, iale. Probabil solut, ia se afla intr-o alta ramura a ICA, în care putem filtra mai bine efectelenedorite, cum ar fi ecoul s, i în care se pot separa, folosind un singur microfon dar informat, ii maidetaliate, sursele, facând aplicarea acestor algoritmi mai putin predispusa erorilor.
3.3. Toolbox Matlab
Pentru estimarea DOA au fost implementat, i algoritmii ales, i in Matlab. Din cauza nevoii detestare la nivel teoretic a metodelor pentru estimare, au fost elaborate si cateva functii desimulare a ies, irilor unui ULA. În cele din urma am ajuns la o serie de funct, ii Matlab, grupateintr-un Toolbox.
Acesta cont, ine:
16

Capitolul 3. Analiza performant,elor în simulare
• implementare separata pentru fiecare algoritm: Beamforming, Capon, ESPRIT si MU-SIC.
• funct, ii pentru generare date de test: semnale de banda îngusta, de banda larga sauprelucrarea unor date deja existente( spre exemplu, fisere .wav). Adit, ional exista s, i ofunct, ie pentru adaugare de zgomot.
• funct, ii pentru separarea frecvent,elor folosind Short Time Fourier Transform, pentruadaptarea us,oara a metodelor in cazul semnalelor de banda larga.
Acest toolbox poate fi descarcat de la adresa:
https://github.com/ovidiualexandru/DOAToolbox
Scopul acestui Toolbox pe viitor va fi ameliorarea efortului necesar aplicarii unui algoritmde estimare spectrala spat, iala. În momentul de fat, a, des, i exista studii si lucrari s,tiint, ificepublicate intr-un numar extensiv, unele chiar care sust, in ca metodele au fost testate pe un ULAadevarat, înregistrarile nu se gasesc. As, dori ca acest lucru sa se schimbe prin acest Toolbox.Înregistrarile facute deja vor fi descarcabile de la adresa mai sus ment, ionata, urmând a mai fiadaugate altele. Des, i în acest studiu se trateaza un caz specific, anume semnale care coresundgamei [0; 4000]Hertz, înregistrarile nefiind de ajutor cuiva care, spre exemplu, studiaza un astfelde algoritm pentru medii subacvatice, consider ca acest caz este destul de general pentru a puteafi de ajutor candva.
3.4. Simulare
Pentru a putea face o distinct, ie între performant,ele s, i caracteristicile fiecarui algoritm estenecesara o evaluare in condit, ii optime, „de laborator“. Acest lucru inseamna ca este necesarun set de date în care zgomotul este de tip zgomot alb si putem modifica influent,a acestuia,SNR-ul.
De asemenea, trebuie sa putem avea control si asupra semnalelor analizate. Spectrultrebuie sa poata fi controlat s, i cunoscut.
În sfârs, it, arrayul de microfoane trebuie sa fie ideal. Acest lucru inseamna ca:
• microfoanele au o funct, ie de transfer ideala, pentru a respecta supozit, ia facuta în (2.2) ,anume ca toate microfoanele au aceeasi funct, ie de transfer, adica arrayul este „calibrat“.
• distant,a între microfoane este egala.
Aceste condit, ii nu se pot realiza decât prin simulare. Astfel ca acest capitol va fi dedicatevaluarii teoretice a algoritmilor. Pentru a face o evaluare cât mai cuprinzatoare, vom folosi maimulte tipuri de semnale, incepând de la cazul monofrecvent, ial si ajungând, în cele din urma, lasemnale deja înregistrate cu un singur microfon.
Împart, irea sect, iunilor este facuta dupa tipul semnalelor folosite:
• Semnale monofrecvent,iale: în aceasta sect, iune vor fi folosite semnale compuse dintr-osingura frecvent, a. Scopul acestei sect, iuni este stabilirea preciziei de baza pentru fiecaremetoda.
• Semnale multifrecvent,iale: aceasta sect, iune va cuprinde semnale de banda larga. Scopuleste de a observa schimbarile produse asupra preciziei prin separarea frecvent,elor folosindSTFT.
17
Capitolul 3. Analiza performant,elor în simulare
• Înregistrari: semnalele nu vor mai fi generate, ci vor fi folosite es,antioane achizit, ionate cuun singur microfon. Scopul este de a vedea daca performant,ele se pastreaza în cazul încare semnalele nu mai sunt ideale.
Fiecare test va cuprinde urmatoarele puncte:
Scopul testului, va fi prezentat pe scurt obiectivul sau caracteristica care va fi scoasa in evident, ade test.
Semnalul folosit, frecvent,a sau frecvent,ele din care este compusa fiecare sursa, s, i cu o reprezen-tare grafica a spectrului unde este cazul.
Rezultatul obt, inut pentru fiecare metoda, sub forma grafica s, i numerica. Prezentarea rezulta-tului numeric va fi facut sub forma de tabel, cuprinzând urmatoarele coloane:
• Metoda folosita: Beamforming, Capon, MUSIC s, i ESPRIT.
• Unghiul DOA estimat, notat θ: rezultatul dat de metoda. Obt, inerea acestuia seface prin însumarea estimarii de putere a tuturor frecvent,elor dintr-un unghi. Fiecaremetoda (în afara de ESPRIT ) are ca rezultat o matrice care cont, ine estimari de puterea semnalului, în perechi (frecvent,a, unghi). Însumând aceste estimari pentru toatefrecvent,ele, putem obt, ine unghiul „cu puterea cea mai mare“. Acesta este interpretatca fiind rezultatul final.
• Frecvent,a dominanta, notata fc. Pe scurt, aceasta este frecvent,a cu puterea ceamai mare din unghiul θ. În cazul ESPRIT, aceasta este frecvent,a pentru care a fostrulat testul.
Interpretarea rezultatului ca o concluzie, fiecare estimare de unghi va fi interpretata.
3.4.1. Semnale monofrecvent, iale
Clasa semnalelor monofrecvent, iale, sau de banda îngusta, reprezinta o instant, a pentru careestimarea DOA se poate face relativ usor. Frecvent,ele nu trebuie separate, iar distant,a întresenzori pooate fi aleasa in funct, ie de singura frecvent,a prezenta.
Aplicat, ii pentru acest caz se regasesc in telecomunicat, ii, cum ar fi routerele wireless s, itelefoanele mobile, care folosesc semnale modulate. Des, i, insa, gama de frecvent,e este mult înafara celor discutate in aceasta lucrare, putem considera un caz ideal în care sursele emit unsemnal monofrecvent, ial in cadrul spectrului audio uman.
Cazul cel mai simplu pentru simulare. Se stabiles,te un unghi incident al semnalului, careva stabili întârzierea pentru fiecare element din array. Cu aceasta intârziere, se calculeaza valorilesinusoidei pentru fiecare microfon.
Rezultatele produse de metoda ESPRIT vor fi interpretate într-o alta maniera decât celepentru Beamforming, Capon si MUSIC deoarece aceasta metoda nu presupune evaluarea puteriisemnalului pentru o pereche (frecventa, unghi) ci produce estimari pentru unghiurile surselor.
18
Capitolul 3. Analiza performant,elor în simulare
Semnale monofrecvent, iale - Surse departate, fara zgomot
Scopul acestui test este de a ne face o prima idee legata de precizia fiecarui algoritm. Condit, iilesunt urmatoarele:
Semnalul are urmatoarele caracteristici:
• doua surse emit un semnal monofrecvent, ial, cu frecventa fc = 4000 Hertz.
• sursele se afla la o distant, a mare una fata de cealalta, θ1 = −5◦ s, i θ1 = 40◦
• zgomotul este foarte mic, cu SNR = 20dB
Fiind condit, ii aproape ideale, este de as,teptat ca estimarile sa fie foarte bune pentru toatemetodele.
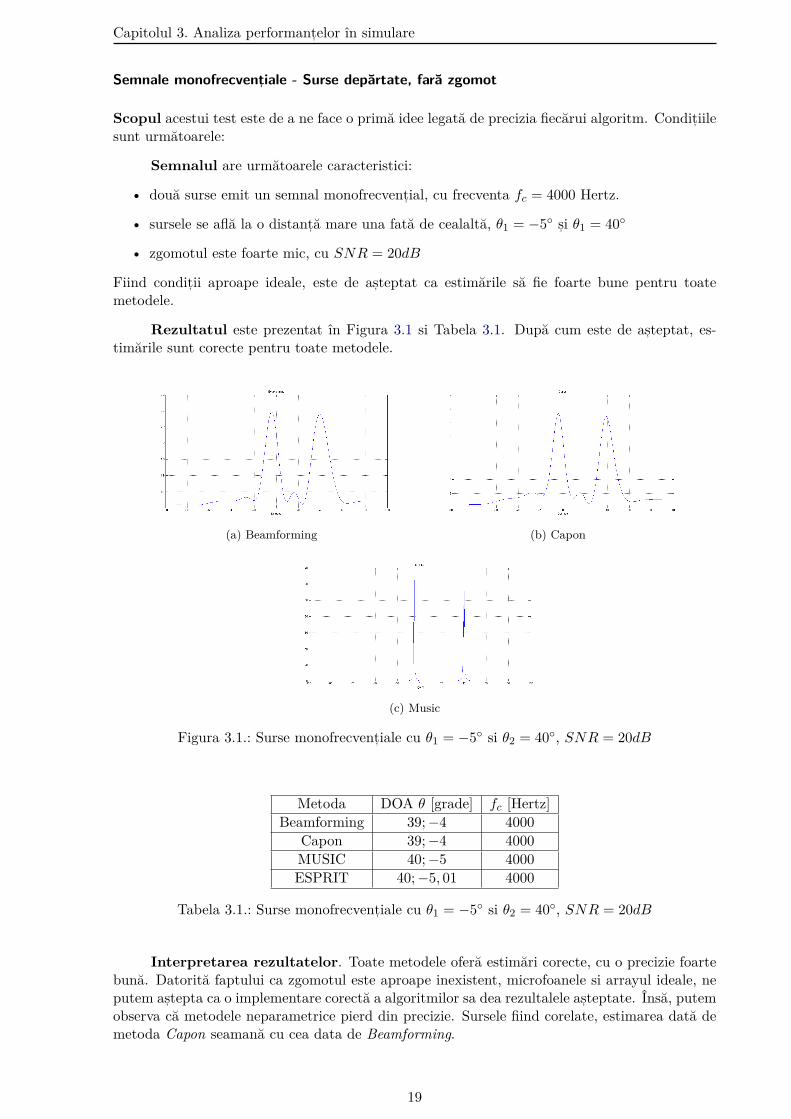
Rezultatul este prezentat în Figura 3.1 si Tabela 3.1. Dupa cum este de as,teptat, es-timarile sunt corecte pentru toate metodele.
(a) Beamforming (b) Capon
(c) Music
Figura 3.1.: Surse monofrecvent, iale cu θ1 = −5◦ si θ2 = 40◦, SNR = 20dB
Metoda DOA θ [grade] fc [Hertz]Beamforming 39;−4 4000
Capon 39;−4 4000MUSIC 40;−5 4000ESPRIT 40;−5, 01 4000
Tabela 3.1.: Surse monofrecvent, iale cu θ1 = −5◦ si θ2 = 40◦, SNR = 20dB
Interpretarea rezultatelor. Toate metodele ofera estimari corecte, cu o precizie foartebuna. Datorita faptului ca zgomotul este aproape inexistent, microfoanele si arrayul ideale, neputem as,tepta ca o implementare corecta a algoritmilor sa dea rezultalele as,teptate. Însa, putemobserva ca metodele neparametrice pierd din precizie. Sursele fiind corelate, estimarea data demetoda Capon seamana cu cea data de Beamforming.
19

Capitolul 3. Analiza performant,elor în simulare
Semnale monofrecvent, iale - Surse departate, in condit, ii de zgomot
Scopul testului este de a determina influenta zgomotului asupra estimarilor, în condit, ii similarecazului anterior, fiind schimbata doar puterea zgomotului.
Semnalul este similar cazului anterior. Doua surse emit cu aceeas, i frecvent, a fc = 4000Hertz. θ1 = −5◦ s, i θ1 = 40◦.În acest caz, SNR = 0dB.
Rezultatul este prezentat în Figura 3.2 si Tabela 3.2.
(a) Beamforming (b) Capon
(c) Music
Figura 3.2.: Surse monofrecvent, iale cu θ1 = −5◦ si θ1 = 40◦, SNR = 0dB
Metoda DOA θ [grade] fc [Hertz]Beamforming −4; 39 4000
Capon −4; 39 4000MUSIC −5; 40 4000ESPRIT −4, 97; 40 4000
Tabela 3.2.: Surse monofrecvent, iale cu θ1 = −5◦ si θ1 = 40◦, SNR = 0dB
Interpretarea rezultatului. Nu se poate observa o diferenta notabila fat, a de cazulprecedent, zgomotul fiind în acest caz inca prea mic pentru a degrada considerabil performant,ele.Se poate observa „largirea“ lobilor pentru metodele neparametrice. Putem concluziona, întreanumite limite, zgomotul nu este o influent, a majora asupra preciziei metodelor.
Semnale monofrecvent, iale - Surse apropiate, fara zgomot
Scopul. În general nu ne putem as,tepta ca sursele de semnal vor fi distant,ate foarte mult unade cealalta. Trebuie analizat s, i cazul în care acestea sunt apropiate la doar cateva grade.
Semnalul este constituit din doua surse cu frecventa fc = 4000 Hertz, la unghiuriapropiate.θ1 = 5◦ si θ2 = 10◦. SNR = 20dB
20
Capitolul 3. Analiza performant,elor în simulare
(a) Beamforming (b) Capon
(c) Music
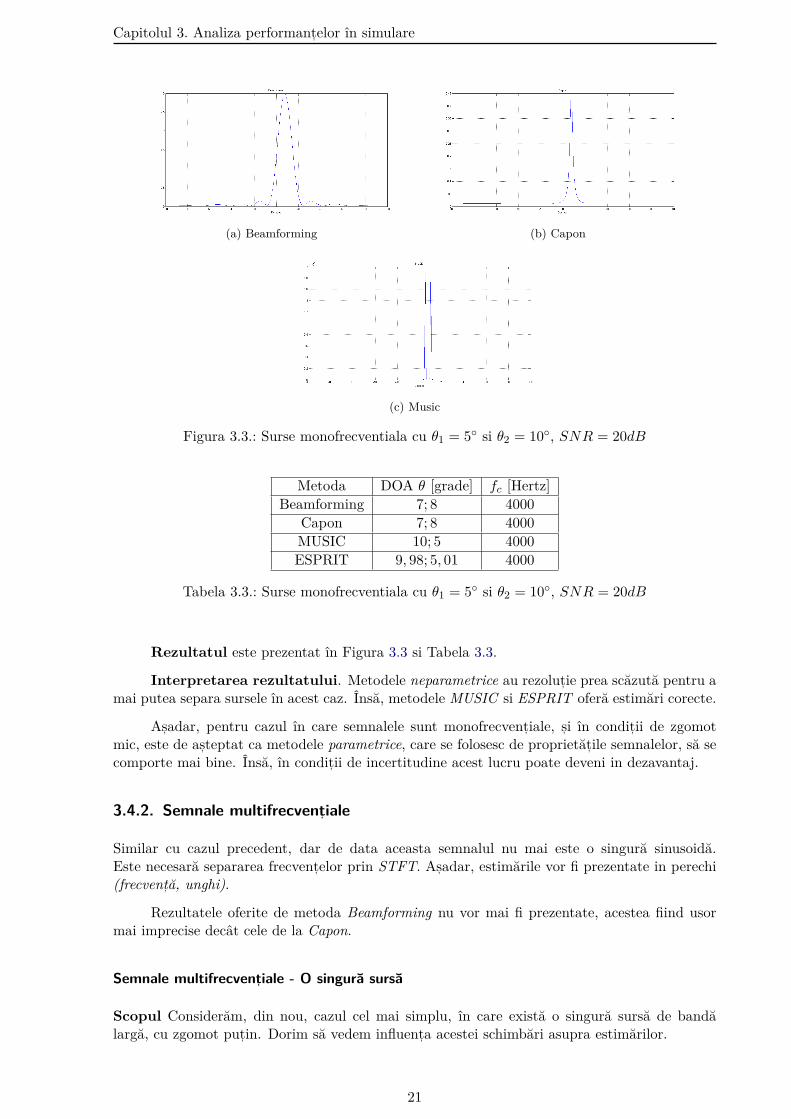
Figura 3.3.: Surse monofrecventiala cu θ1 = 5◦ si θ2 = 10◦, SNR = 20dB
Metoda DOA θ [grade] fc [Hertz]Beamforming 7; 8 4000
Capon 7; 8 4000MUSIC 10; 5 4000ESPRIT 9, 98; 5, 01 4000
Tabela 3.3.: Surse monofrecventiala cu θ1 = 5◦ si θ2 = 10◦, SNR = 20dB
Rezultatul este prezentat în Figura 3.3 si Tabela 3.3.
Interpretarea rezultatului. Metodele neparametrice au rezolut, ie prea scazuta pentru amai putea separa sursele în acest caz. Însa, metodele MUSIC si ESPRIT ofera estimari corecte.
As,adar, pentru cazul în care semnalele sunt monofrecvent, iale, s, i în condit, ii de zgomotmic, este de as,teptat ca metodele parametrice, care se folosesc de proprietat, ile semnalelor, sa secomporte mai bine. Însa, în condit, ii de incertitudine acest lucru poate deveni in dezavantaj.
3.4.2. Semnale multifrecvent, iale
Similar cu cazul precedent, dar de data aceasta semnalul nu mai este o singura sinusoida.Este necesara separarea frecvent,elor prin STFT. As,adar, estimarile vor fi prezentate in perechi(frecvent,a, unghi).
Rezultatele oferite de metoda Beamforming nu vor mai fi prezentate, acestea fiind usormai imprecise decât cele de la Capon.
Semnale multifrecvent, iale - O singura sursa
Scopul Consideram, din nou, cazul cel mai simplu, în care exista o singura sursa de bandalarga, cu zgomot put, in. Dorim sa vedem influent,a acestei schimbari asupra estimarilor.
21
Capitolul 3. Analiza performant,elor în simulare
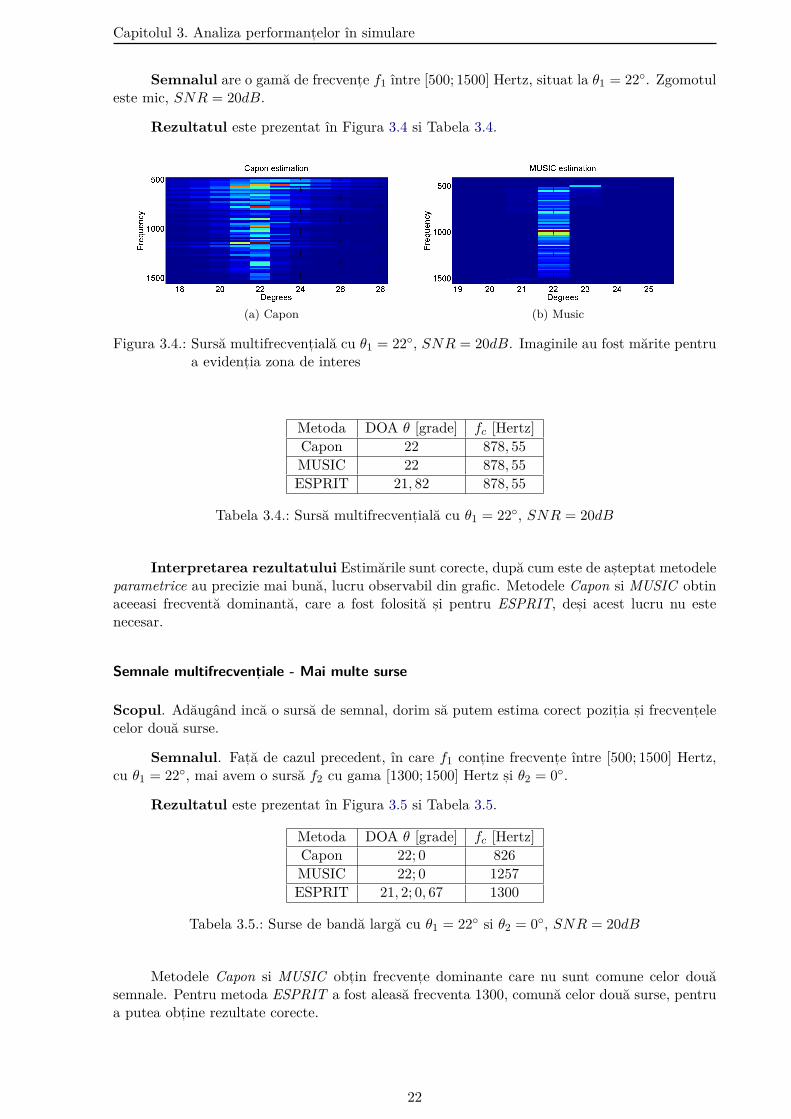
Semnalul are o gama de frecvent,e f1 între [500; 1500] Hertz, situat la θ1 = 22◦. Zgomotuleste mic, SNR = 20dB.
Rezultatul este prezentat în Figura 3.4 si Tabela 3.4.
(a) Capon (b) Music
Figura 3.4.: Sursa multifrecvent, iala cu θ1 = 22◦, SNR = 20dB. Imaginile au fost marite pentrua evident, ia zona de interes
Metoda DOA θ [grade] fc [Hertz]Capon 22 878, 55MUSIC 22 878, 55ESPRIT 21, 82 878, 55
Tabela 3.4.: Sursa multifrecvent, iala cu θ1 = 22◦, SNR = 20dB
Interpretarea rezultatului Estimarile sunt corecte, dupa cum este de as,teptat metodeleparametrice au precizie mai buna, lucru observabil din grafic. Metodele Capon si MUSIC obtinaceeasi frecventa dominanta, care a fost folosita s, i pentru ESPRIT, des, i acest lucru nu estenecesar.
Semnale multifrecvent, iale - Mai multe surse
Scopul. Adaugând inca o sursa de semnal, dorim sa putem estima corect pozit, ia s, i frecvent,elecelor doua surse.
Semnalul. Fat, a de cazul precedent, în care f1 cont, ine frecvent,e între [500; 1500] Hertz,cu θ1 = 22◦, mai avem o sursa f2 cu gama [1300; 1500] Hertz s, i θ2 = 0◦.
Rezultatul este prezentat în Figura 3.5 si Tabela 3.5.
Metoda DOA θ [grade] fc [Hertz]Capon 22; 0 826MUSIC 22; 0 1257ESPRIT 21, 2; 0, 67 1300
Tabela 3.5.: Surse de banda larga cu θ1 = 22◦ si θ2 = 0◦, SNR = 20dB
Metodele Capon si MUSIC obt, in frecvent,e dominante care nu sunt comune celor douasemnale. Pentru metoda ESPRIT a fost aleasa frecventa 1300, comuna celor doua surse, pentrua putea obt, ine rezultate corecte.
22
Capitolul 3. Analiza performant,elor în simulare
(a) Capon (b) Music
Figura 3.5.: Surse de banda larga cu θ1 = 22◦ si θ2 = 0◦, SNR = 20dB
Interpretarea rezultatului. Des, i sunt obt, inute rezultate corecte în ceea ce prives,teunghiurile, estimarile de putere pentru frecvent,e nu pot fi folosite pentru ESPRIT, unde a fostaleasa de operator frecvent,a si numarul de surse cautate. Acest lucru se datoreaza si faptuluica puterea frecvent,elor este egala în toate punctele, lucru rar întâlnit în semnalele reale.
Semnale multifrecvent, iale - Mai multe surse, in condit, ii de zgomot
Scopul. Ca s, i in cazul monofrecvent, ial, încercam sa observam influent,a zgomotului asuprarezultatelor.
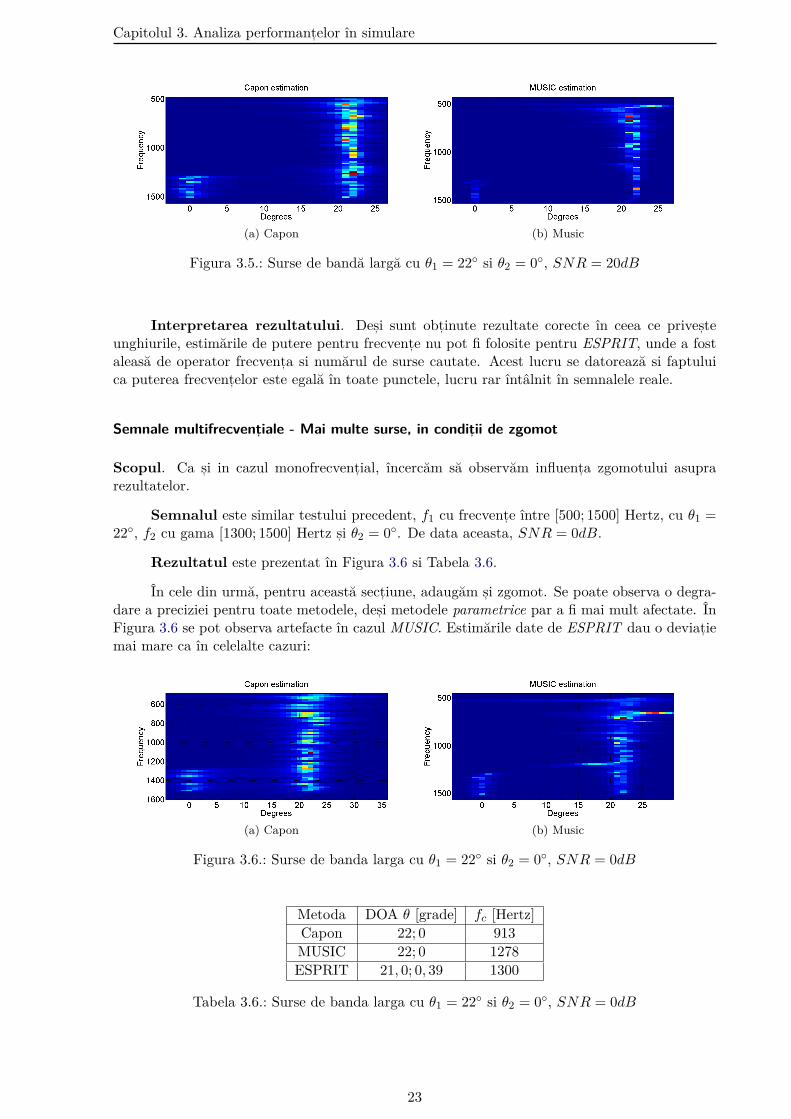
Semnalul este similar testului precedent, f1 cu frecvent,e între [500; 1500] Hertz, cu θ1 =22◦, f2 cu gama [1300; 1500] Hertz s, i θ2 = 0◦. De data aceasta, SNR = 0dB.
Rezultatul este prezentat în Figura 3.6 si Tabela 3.6.
În cele din urma, pentru aceasta sect, iune, adaugam s, i zgomot. Se poate observa o degra-dare a preciziei pentru toate metodele, des, i metodele parametrice par a fi mai mult afectate. ÎnFigura 3.6 se pot observa artefacte în cazul MUSIC. Estimarile date de ESPRIT dau o deviat, iemai mare ca în celelalte cazuri:
(a) Capon (b) Music
Figura 3.6.: Surse de banda larga cu θ1 = 22◦ si θ2 = 0◦, SNR = 0dB
Metoda DOA θ [grade] fc [Hertz]Capon 22; 0 913MUSIC 22; 0 1278ESPRIT 21, 0; 0, 39 1300
Tabela 3.6.: Surse de banda larga cu θ1 = 22◦ si θ2 = 0◦, SNR = 0dB
23
Capitolul 3. Analiza performant,elor în simulare
Interpretarea rezultatului. Similar cazului monofrecvent, ial, nu exista o diferent, a no-tabila intre testul fara zgomot s, i cel cu zgomot. Rezultatele obt, inute sunt corecte.
3.4.3. Înregistrari
Pentru a merge mai departe in aceasta comparat, ie, trebuie sa ne apropriem si mai mult de cazulreal. As,adar, în aceasta sect, iune, vor fi utilizate înregistrari facute în prealabil cu un singurmicrofon.
Es,antioanele semnalului nu mai sunt evaluate de simulator. Acestea sunt furnizate caparametru, s, i în funct, ie de perioada de es,antionare s, i unghi sunt calculate intârzierile aplicatepentru fiecare element din ULA.
Acest caz se aproprie foarte mult de un set de date experimentale achizit, ionate. Funct, ia detransfer a microfonului nu este ideala, as,adar semnalul nu mai este „perfect“. Singurele elementeideale sunt cele legate de array: acesta este calibrat s, i microfoanele sunt as,ezate la distant, a egala.
În aceasta sect, iune, pe lânga estimarile spectrale spat, iale, vor fi afis,ate s, i spectrele tem-porale ale semnalelor.
Înregistrari - O sursa
Scopul. Evident, ierea faptului ca se pastreaza corectitudinea estimarilor în cazul în care sem-nalul nu mai este ideal.
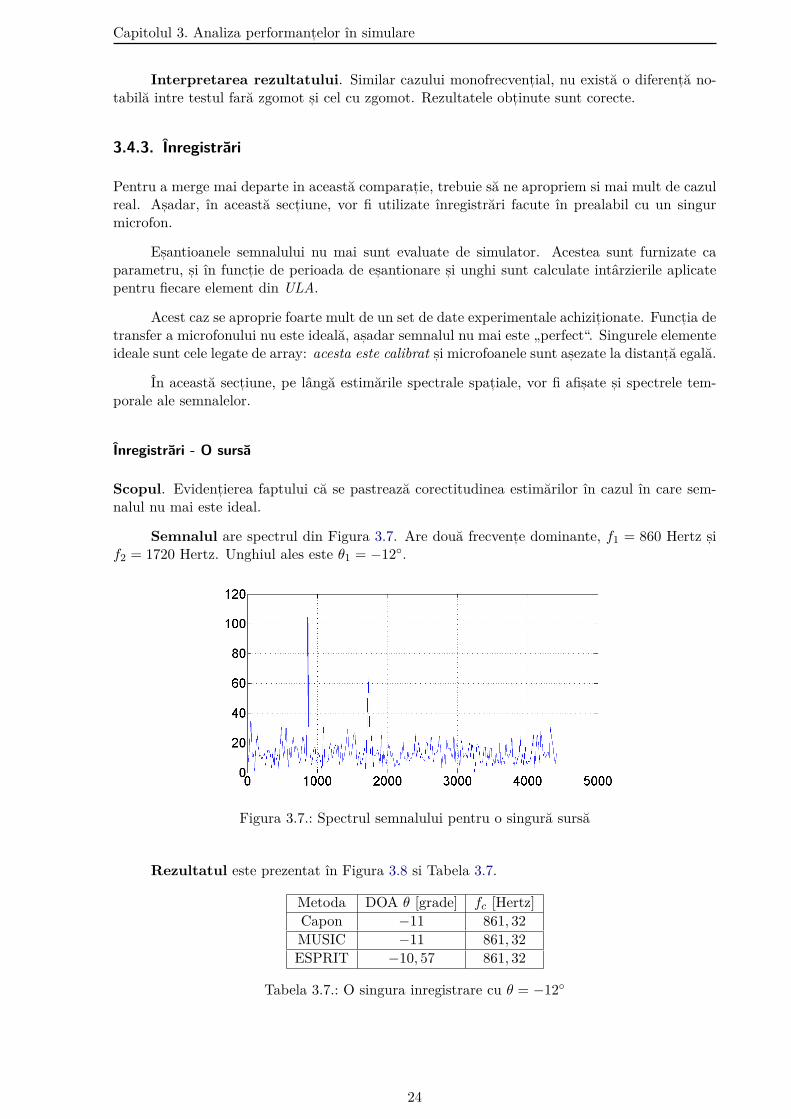
Semnalul are spectrul din Figura 3.7. Are doua frecvent,e dominante, f1 = 860 Hertz s, if2 = 1720 Hertz. Unghiul ales este θ1 = −12◦.
Figura 3.7.: Spectrul semnalului pentru o singura sursa
Rezultatul este prezentat în Figura 3.8 si Tabela 3.7.
Metoda DOA θ [grade] fc [Hertz]Capon −11 861, 32MUSIC −11 861, 32ESPRIT −10, 57 861, 32
Tabela 3.7.: O singura inregistrare cu θ = −12◦
24
Capitolul 3. Analiza performant,elor în simulare
(a) Capon (b) Music
Figura 3.8.: O singura inregistrare cu θ = −12◦
Primele doua metode identifica în mod corect frecvent,a dominanta, as,adar aceasta estefolosita ca parametru pentru ESPRIT.
Interpretarea rezultatului Toate cele trei metode obt, in rezultate bune, erorile fiind deaproximativ un grad. În cazul în care exista o singura sursa se poate estima corect spectrulacesteia s, i pozit, ia.
Înregistrari - Surse multiple
Scopul este constatarea faptului ca în cazul în care exista doua surse cu game diferite, nu sepoate identifica în mod corect pozit, ia acestora.
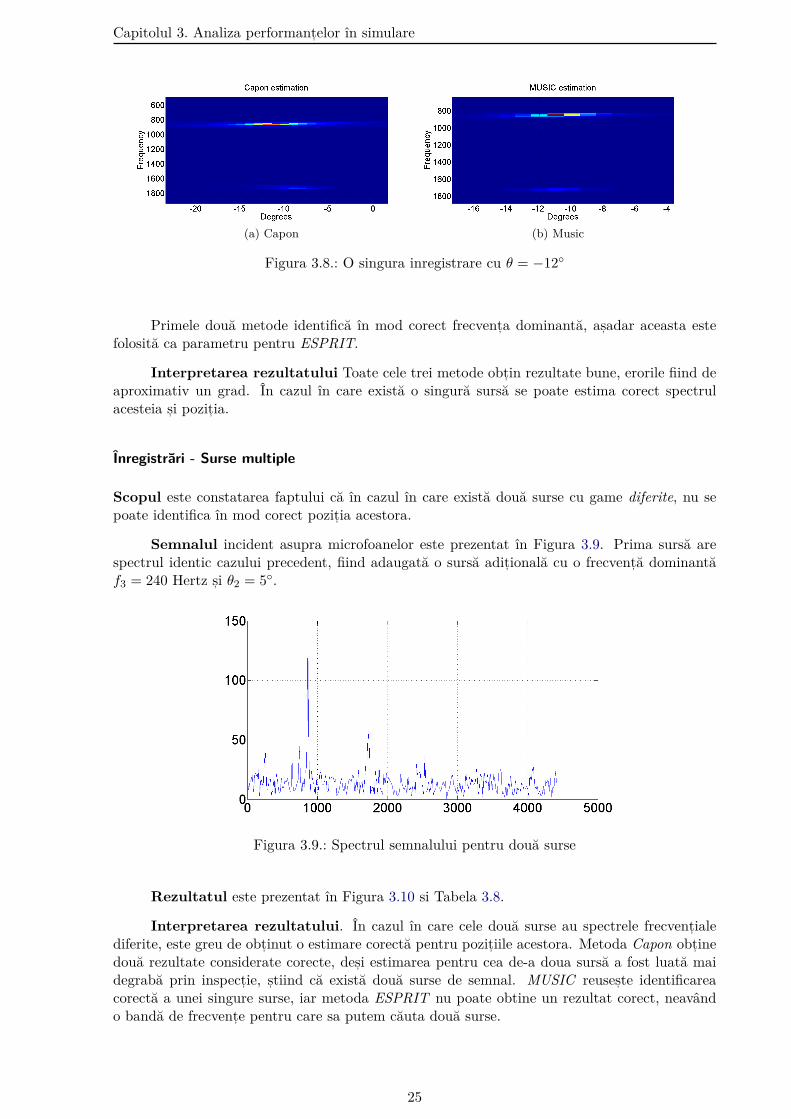
Semnalul incident asupra microfoanelor este prezentat în Figura 3.9. Prima sursa arespectrul identic cazului precedent, fiind adaugata o sursa adit, ionala cu o frecvent, a dominantaf3 = 240 Hertz s, i θ2 = 5◦.
Figura 3.9.: Spectrul semnalului pentru doua surse
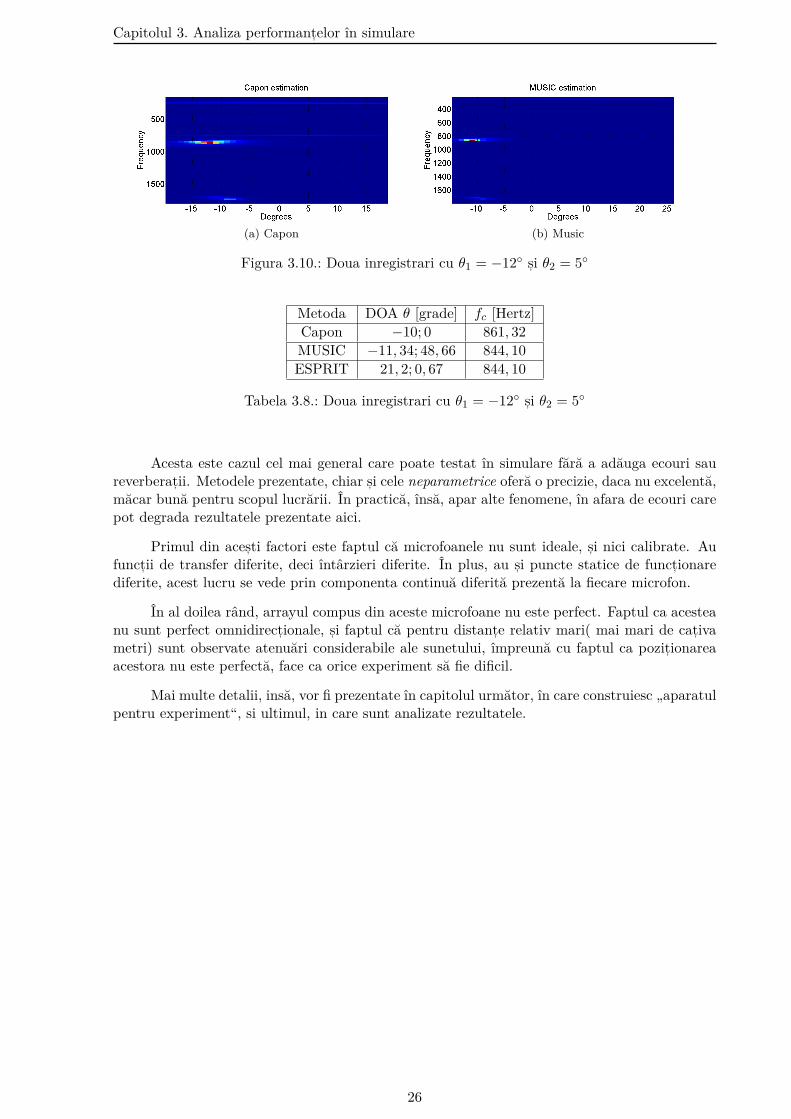
Rezultatul este prezentat în Figura 3.10 si Tabela 3.8.
Interpretarea rezultatului. În cazul în care cele doua surse au spectrele frecvent, ialediferite, este greu de obt, inut o estimare corecta pentru pozit, iile acestora. Metoda Capon obt, inedoua rezultate considerate corecte, des, i estimarea pentru cea de-a doua sursa a fost luata maidegraba prin inspect, ie, s,tiind ca exista doua surse de semnal. MUSIC reuses,te identificareacorecta a unei singure surse, iar metoda ESPRIT nu poate obtine un rezultat corect, neavândo banda de frecvent,e pentru care sa putem cauta doua surse.
25
Capitolul 3. Analiza performant,elor în simulare
(a) Capon (b) Music
Figura 3.10.: Doua inregistrari cu θ1 = −12◦ s, i θ2 = 5◦
Metoda DOA θ [grade] fc [Hertz]Capon −10; 0 861, 32MUSIC −11, 34; 48, 66 844, 10ESPRIT 21, 2; 0, 67 844, 10
Tabela 3.8.: Doua inregistrari cu θ1 = −12◦ s, i θ2 = 5◦
Acesta este cazul cel mai general care poate testat în simulare fara a adauga ecouri saureverberat, ii. Metodele prezentate, chiar s, i cele neparametrice ofera o precizie, daca nu excelenta,macar buna pentru scopul lucrarii. În practica, însa, apar alte fenomene, în afara de ecouri carepot degrada rezultatele prezentate aici.
Primul din aces,ti factori este faptul ca microfoanele nu sunt ideale, s, i nici calibrate. Aufunct, ii de transfer diferite, deci întârzieri diferite. În plus, au s, i puncte statice de funct, ionarediferite, acest lucru se vede prin componenta continua diferita prezenta la fiecare microfon.
În al doilea rând, arrayul compus din aceste microfoane nu este perfect. Faptul ca acesteanu sunt perfect omnidirect, ionale, s, i faptul ca pentru distant,e relativ mari( mai mari de cat, ivametri) sunt observate atenuari considerabile ale sunetului, împreuna cu faptul ca pozit, ionareaacestora nu este perfecta, face ca orice experiment sa fie dificil.
Mai multe detalii, insa, vor fi prezentate în capitolul urmator, în care construiesc „aparatulpentru experiment“, si ultimul, in care sunt analizate rezultatele.
26
4. Dezvoltarea placii de achizit, ie
4.1. Filtrarea Analogica - placut,a micampx8
Pentru es,antionarea corecta a datelor, semnalul microfoanelor trebuie sa fie:
• amplificat, microfoanele în general au caracteristica de a atenua sunetul care nu se afla invecinatatea lor, pentru a face mai us,oara folosirea acestora la birou, fara ca zgomotul defundal sa fie deranjant. De asemenea, ne dorim o precizie cât mai buna a echipamentuluide masura, as,a ca este dezirabila folosirea intregii game de masura a acestuia.
• filtrat analogic, pentru a evita fenomenul de „aliere in frecvent, a“ s, i a încerca eliminareazgomotului înainte de es,antionare.
Convertorul Analog Numeric folosit are o rezolut, ie de 16 bit, i în gama [−10, 10]V . Nedorim sa folosim aceasta gama cât mai eficient, as,adar semnalul microfonului trebuie adus dingama [0, 5]V in cea de [−10, 10]V .
Astfel ca a fost dezvoltata placa micampx8 cu aceste scopuri. Se realizeaza lucrurileacestea folosind doua etaje de Amplificatoare Operat, ionale. Primul are rolul doar de a amplificasemnalul s, i a elimina componenta continua( punctul de 0 este in jurul valorii de 2, 5V ), iar celde-al doilea filtreaza zgomotul s, i mai adauga o amplificare.
În final, amplificarea totala este de 50( aleasa experimental, microfoanele având o variat, iede 20mV în jurul punctului de 0), iar Filtrul Trece Jos este de ordinul I cu frecvent,a de taierefc = 10kHz.
Motivul pentru care nu a fost ales un filtru de ordin mai mare este deoarece defazajuladaugat semnalului devine considerabil, putând afecta masuratorile finale. Nu se pot realizafizic 8 filtre cu exact aceleas, i caracteristici, as,adar a fost aleasa o implementare mai simplapentru partea analogica, lasând loc pentru o filtrare mai buna in domeniul digital.
(a) Schematic (b) Layout
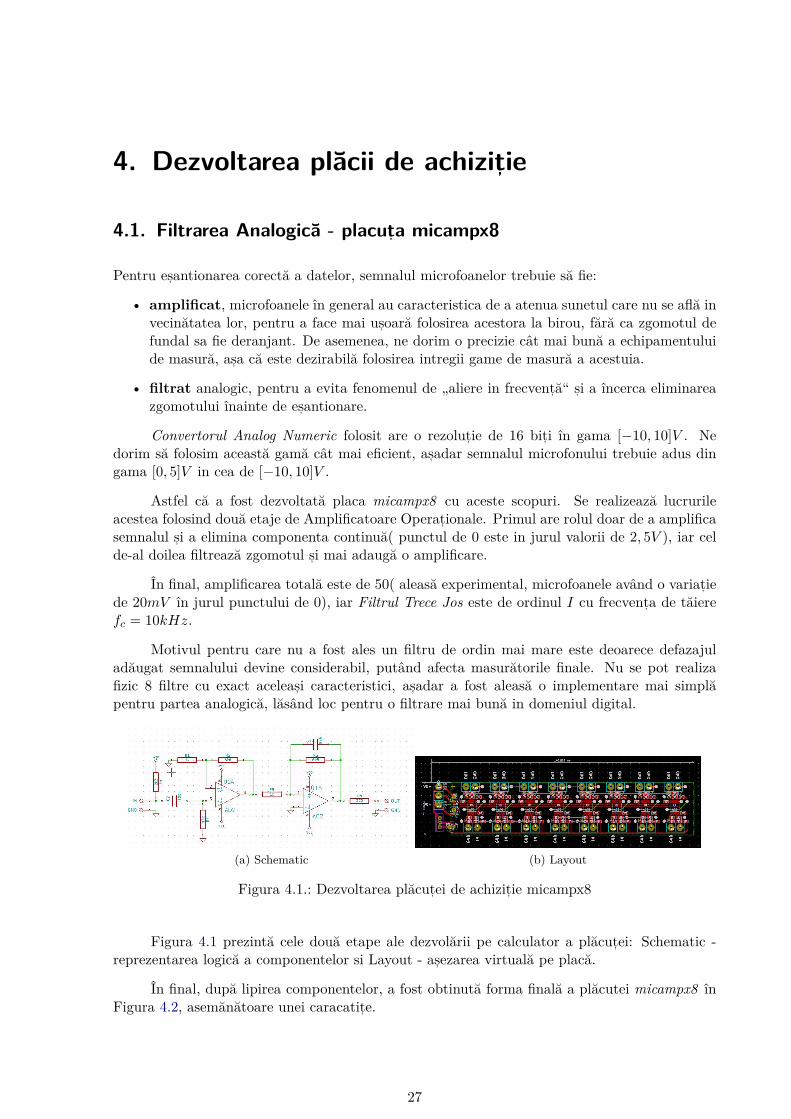
Figura 4.1.: Dezvoltarea placut,ei de achizit, ie micampx8
Figura 4.1 prezinta cele doua etape ale dezvolarii pe calculator a placut,ei: Schematic -reprezentarea logica a componentelor si Layout - as,ezarea virtuala pe placa.
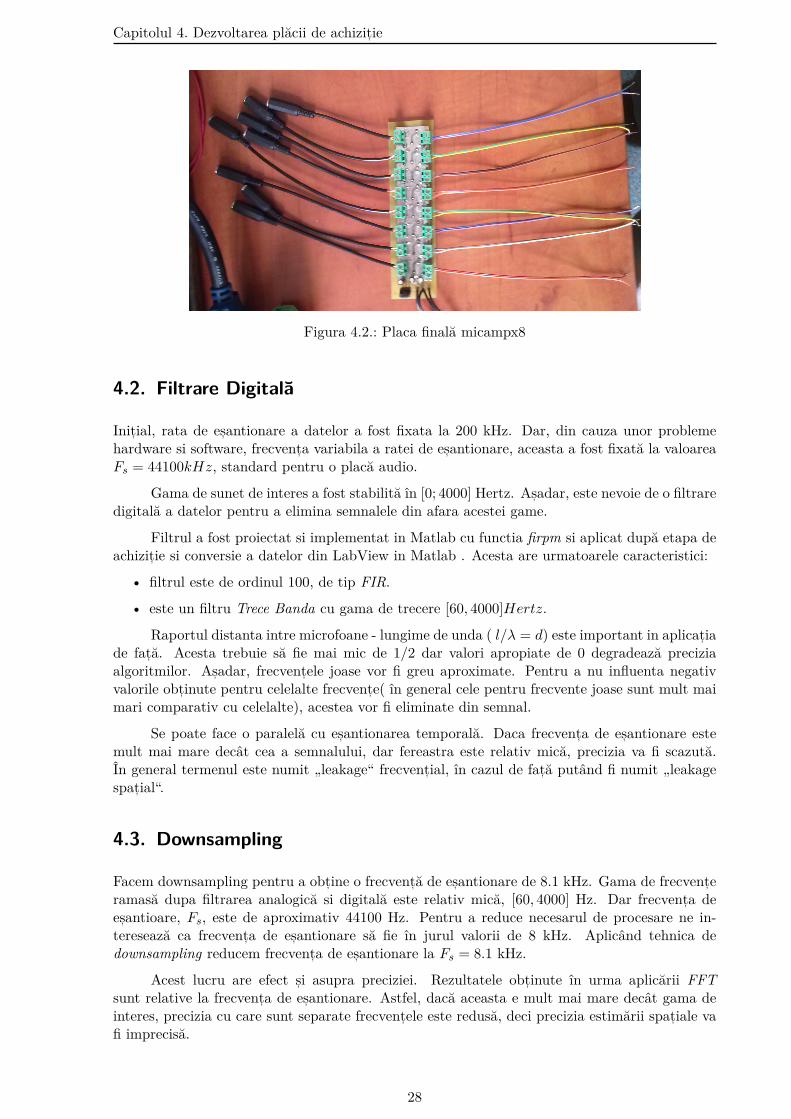
În final, dupa lipirea componentelor, a fost obtinuta forma finala a placutei micampx8 înFigura 4.2, asemanatoare unei caracatit,e.
27
Capitolul 4. Dezvoltarea placii de achizit, ie
Figura 4.2.: Placa finala micampx8
4.2. Filtrare Digitala
Init, ial, rata de es,antionare a datelor a fost fixata la 200 kHz. Dar, din cauza unor problemehardware si software, frecvent,a variabila a ratei de es,antionare, aceasta a fost fixata la valoareaFs = 44100kHz, standard pentru o placa audio.
Gama de sunet de interes a fost stabilita în [0; 4000] Hertz. As,adar, este nevoie de o filtraredigitala a datelor pentru a elimina semnalele din afara acestei game.
Filtrul a fost proiectat si implementat in Matlab cu functia firpm si aplicat dupa etapa deachizit, ie si conversie a datelor din LabView in Matlab . Acesta are urmatoarele caracteristici:
• filtrul este de ordinul 100, de tip FIR.
• este un filtru Trece Banda cu gama de trecere [60, 4000]Hertz.
Raportul distanta intre microfoane - lungime de unda ( l/λ = d) este important in aplicat, iade fat, a. Acesta trebuie sa fie mai mic de 1/2 dar valori apropiate de 0 degradeaza preciziaalgoritmilor. As,adar, frecvent,ele joase vor fi greu aproximate. Pentru a nu influenta negativvalorile obt, inute pentru celelalte frecvent,e( în general cele pentru frecvente joase sunt mult maimari comparativ cu celelalte), acestea vor fi eliminate din semnal.
Se poate face o paralela cu es,antionarea temporala. Daca frecvent,a de es,antionare estemult mai mare decât cea a semnalului, dar fereastra este relativ mica, precizia va fi scazuta.În general termenul este numit „leakage“ frecvent, ial, în cazul de fat, a putând fi numit „leakagespat, ial“.
4.3. Downsampling
Facem downsampling pentru a obt, ine o frecvent, a de es,antionare de 8.1 kHz. Gama de frecvent,eramasa dupa filtrarea analogica si digitala este relativ mica, [60, 4000] Hz. Dar frecvent,a dees,antioare, Fs, este de aproximativ 44100 Hz. Pentru a reduce necesarul de procesare ne in-tereseaza ca frecvent,a de es,antionare sa fie în jurul valorii de 8 kHz. Aplicând tehnica dedownsampling reducem frecvent,a de es,antionare la Fs = 8.1 kHz.
Acest lucru are efect s, i asupra preciziei. Rezultatele obt, inute în urma aplicarii FFTsunt relative la frecvent,a de es,antionare. Astfel, daca aceasta e mult mai mare decât gama deinteres, precizia cu care sunt separate frecvent,ele este redusa, deci precizia estimarii spat, iale vafi imprecisa.
28
Capitolul 4. Dezvoltarea placii de achizit, ie
4.4. LabView
Achizit, ia datelor, es,antionarea, se face in LabView. Placa micampx8 are rolul de filtrare ana-logica si amplificare. Pentru aplicarea filtrelor digitale si obt, inerea setului de date final, estenevoie de es,antionarea fiecarui canal corespunzator fiecarui microfon. Pentru asta, folosim placaNational Instruments 7833R, varful de gama al anului 2007. Aceasta are caracteristicile dorite:8 canale CAN controlate independent, cu frecvent,a de es,antionare de 200 ksps. Mai mult, placaare încorporat si un FPGA, as,adar frecvent,a de es,antionare va fi precisa prin determinismul întimp oferit de acesta.
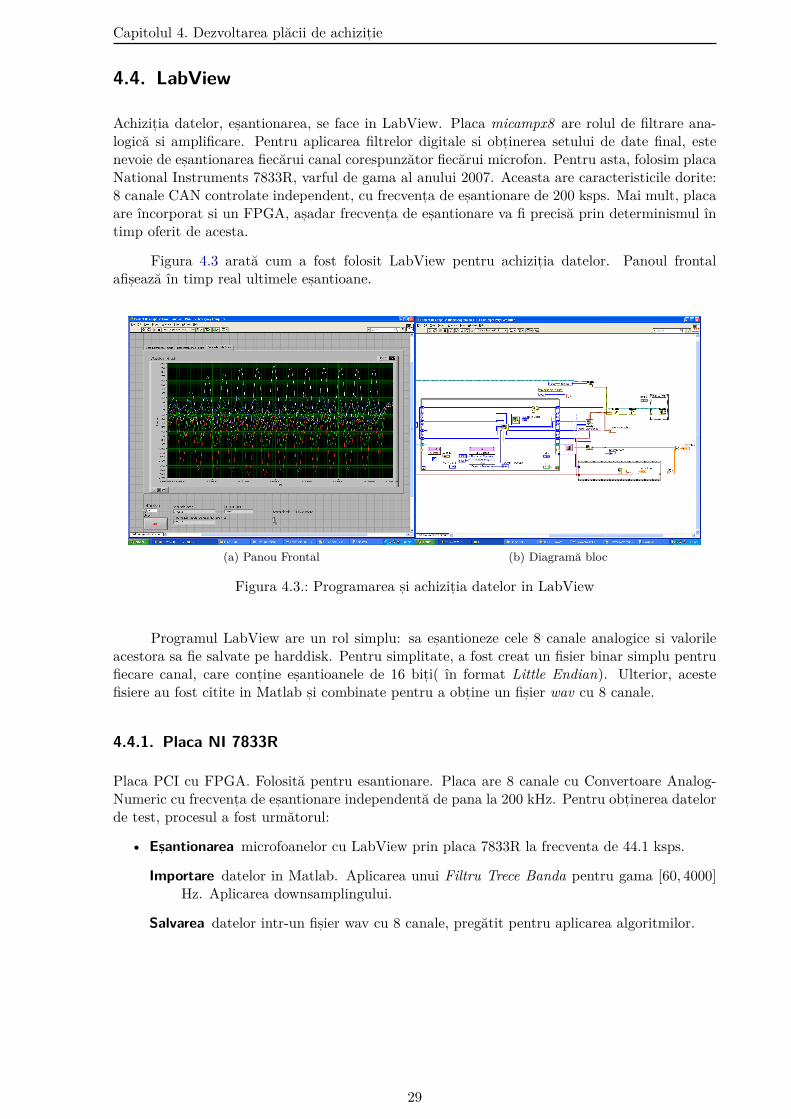
Figura 4.3 arata cum a fost folosit LabView pentru achizit, ia datelor. Panoul frontalafis,eaza în timp real ultimele es,antioane.
(a) Panou Frontal (b) Diagrama bloc
Figura 4.3.: Programarea s, i achizit, ia datelor in LabView
Programul LabView are un rol simplu: sa es,antioneze cele 8 canale analogice si valorileacestora sa fie salvate pe harddisk. Pentru simplitate, a fost creat un fisier binar simplu pentrufiecare canal, care cont, ine es,antioanele de 16 bit, i( în format Little Endian). Ulterior, acestefisiere au fost citite in Matlab s, i combinate pentru a obt, ine un fis, ier wav cu 8 canale.
4.4.1. Placa NI 7833R
Placa PCI cu FPGA. Folosita pentru esantionare. Placa are 8 canale cu Convertoare Analog-Numeric cu frecvent,a de es,antionare independenta de pana la 200 kHz. Pentru obt, inerea datelorde test, procesul a fost urmatorul:
• Es,antionarea microfoanelor cu LabView prin placa 7833R la frecventa de 44.1 ksps.
Importare datelor in Matlab. Aplicarea unui Filtru Trece Banda pentru gama [60, 4000]Hz. Aplicarea downsamplingului.
Salvarea datelor intr-un fis, ier wav cu 8 canale, pregatit pentru aplicarea algoritmilor.
29
5. Rezultate s, i Concluzii
5.1. Rezultate
Rezultatele obt, inute în rulare, prin achizit, ia datelor din mediul real. Nota: datele nu au fostobt, inute în „condit, ii de studio“. Au existat surse parazite de zgomot, cum ar fi ventilatorulcalculatorului care înregistra rezultatele.
Figura 5.1.: Aparatul de înregistrare
Figura 5.1 prezinta ansamblul de înregistrare în act, iune: cele 8 microfoane, placut,a mi-campx8 s, i placa de achizit, ie pentru NI 7833R.
Rezultatele vor fi prezentate similar celor din simulare, mai exact, similar Sect, iunii 3.4.3,cont, inând 4 part, i:
• Scopul testului.
• Semnalul compus incident asupra arrayului cu spectrul s, i frecvent,a dominanta.
• Rezultatul obt, inut, grafic s, i numeric.
• Interpretarea rezultatului.
30
Capitolul 5. Rezultate s, i Concluzii
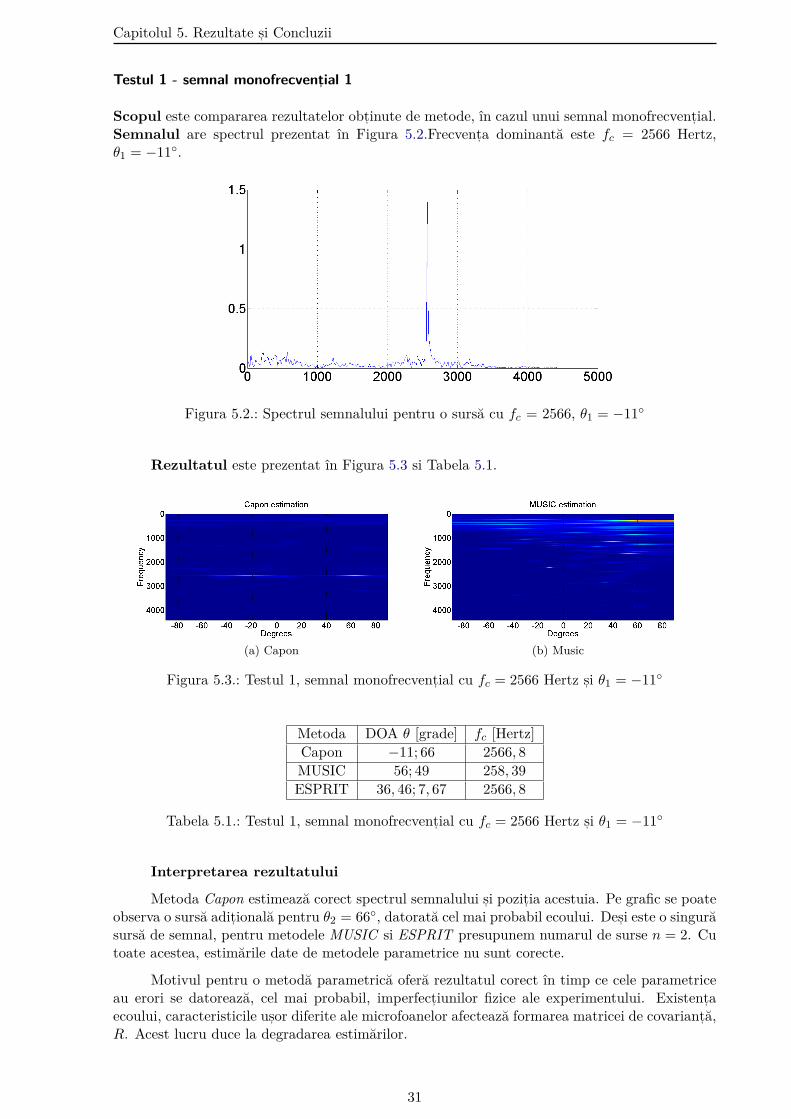
Testul 1 - semnal monofrecvent, ial 1
Scopul este compararea rezultatelor obt, inute de metode, în cazul unui semnal monofrecvent, ial.Semnalul are spectrul prezentat în Figura 5.2.Frecvent,a dominanta este fc = 2566 Hertz,θ1 = −11◦.
Figura 5.2.: Spectrul semnalului pentru o sursa cu fc = 2566, θ1 = −11◦
Rezultatul este prezentat în Figura 5.3 si Tabela 5.1.
(a) Capon (b) Music
Figura 5.3.: Testul 1, semnal monofrecvent, ial cu fc = 2566 Hertz s, i θ1 = −11◦
Metoda DOA θ [grade] fc [Hertz]Capon −11; 66 2566, 8MUSIC 56; 49 258, 39ESPRIT 36, 46; 7, 67 2566, 8
Tabela 5.1.: Testul 1, semnal monofrecvent, ial cu fc = 2566 Hertz s, i θ1 = −11◦
Interpretarea rezultatului
Metoda Capon estimeaza corect spectrul semnalului s, i pozit, ia acestuia. Pe grafic se poateobserva o sursa adit, ionala pentru θ2 = 66◦, datorata cel mai probabil ecoului. Des, i este o singurasursa de semnal, pentru metodele MUSIC si ESPRIT presupunem numarul de surse n = 2. Cutoate acestea, estimarile date de metodele parametrice nu sunt corecte.
Motivul pentru o metoda parametrica ofera rezultatul corect în timp ce cele parametriceau erori se datoreaza, cel mai probabil, imperfect, iunilor fizice ale experimentului. Existent,aecoului, caracteristicile us,or diferite ale microfoanelor afecteaza formarea matricei de covariant, a,R. Acest lucru duce la degradarea estimarilor.
31
Capitolul 5. Rezultate s, i Concluzii
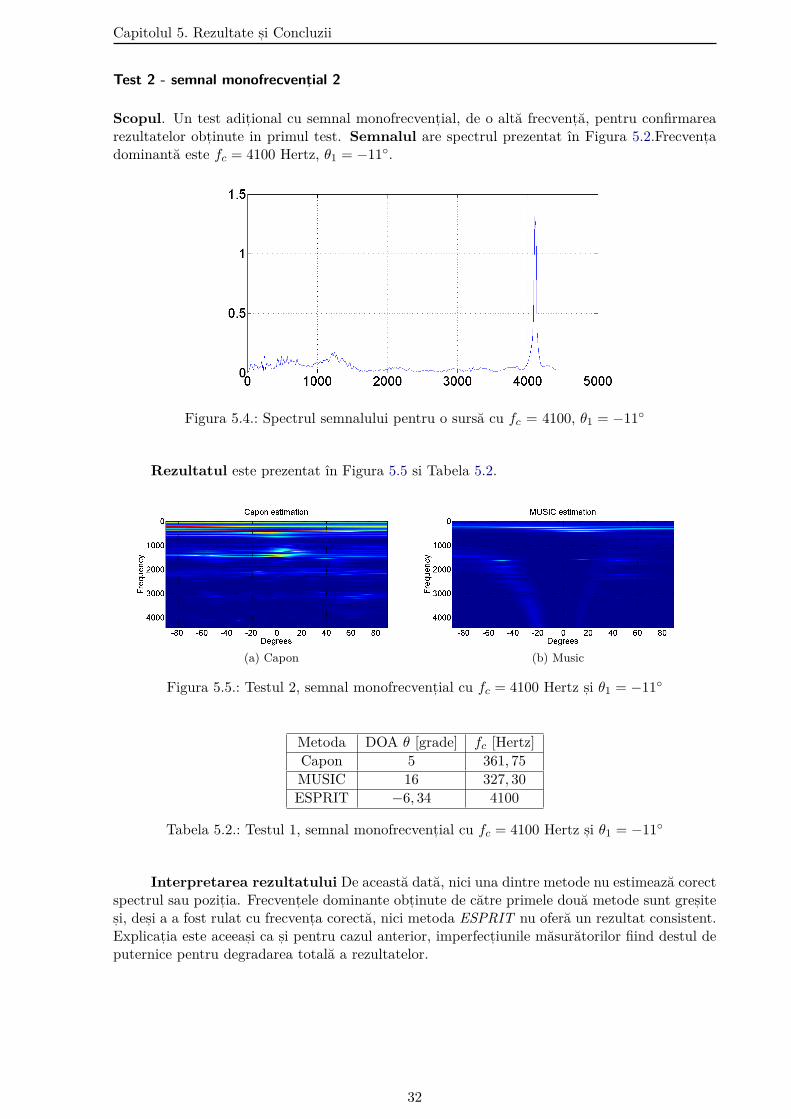
Test 2 - semnal monofrecvent, ial 2
Scopul. Un test adit, ional cu semnal monofrecvent, ial, de o alta frecvent, a, pentru confirmarearezultatelor obt, inute in primul test. Semnalul are spectrul prezentat în Figura 5.2.Frecvent,adominanta este fc = 4100 Hertz, θ1 = −11◦.
Figura 5.4.: Spectrul semnalului pentru o sursa cu fc = 4100, θ1 = −11◦
Rezultatul este prezentat în Figura 5.5 si Tabela 5.2.
(a) Capon (b) Music
Figura 5.5.: Testul 2, semnal monofrecvent, ial cu fc = 4100 Hertz s, i θ1 = −11◦
Metoda DOA θ [grade] fc [Hertz]Capon 5 361, 75MUSIC 16 327, 30ESPRIT −6, 34 4100
Tabela 5.2.: Testul 1, semnal monofrecvent, ial cu fc = 4100 Hertz s, i θ1 = −11◦
Interpretarea rezultatului De aceasta data, nici una dintre metode nu estimeaza corectspectrul sau pozit, ia. Frecvent,ele dominante obt, inute de catre primele doua metode sunt gres, ites, i, des, i a a fost rulat cu frecvent,a corecta, nici metoda ESPRIT nu ofera un rezultat consistent.Explicat, ia este aceeas, i ca s, i pentru cazul anterior, imperfect, iunile masuratorilor fiind destul deputernice pentru degradarea totala a rezultatelor.
32
Capitolul 5. Rezultate s, i Concluzii
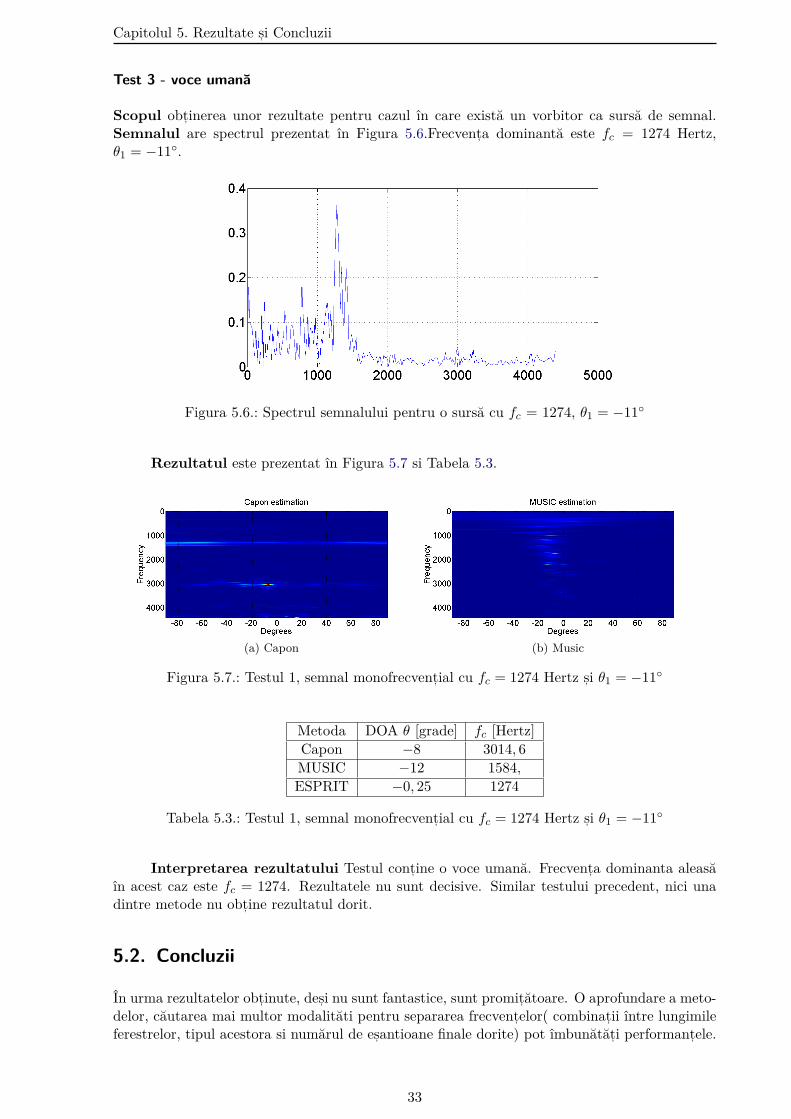
Test 3 - voce umana
Scopul obt, inerea unor rezultate pentru cazul în care exista un vorbitor ca sursa de semnal.Semnalul are spectrul prezentat în Figura 5.6.Frecvent,a dominanta este fc = 1274 Hertz,θ1 = −11◦.
Figura 5.6.: Spectrul semnalului pentru o sursa cu fc = 1274, θ1 = −11◦
Rezultatul este prezentat în Figura 5.7 si Tabela 5.3.
(a) Capon (b) Music
Figura 5.7.: Testul 1, semnal monofrecvent, ial cu fc = 1274 Hertz s, i θ1 = −11◦
Metoda DOA θ [grade] fc [Hertz]Capon −8 3014, 6MUSIC −12 1584,ESPRIT −0, 25 1274
Tabela 5.3.: Testul 1, semnal monofrecvent, ial cu fc = 1274 Hertz s, i θ1 = −11◦
Interpretarea rezultatului Testul cont, ine o voce umana. Frecvent,a dominanta aleasaîn acest caz este fc = 1274. Rezultatele nu sunt decisive. Similar testului precedent, nici unadintre metode nu obt, ine rezultatul dorit.
5.2. Concluzii
În urma rezultatelor obt, inute, des, i nu sunt fantastice, sunt promit, atoare. O aprofundare a meto-delor, cautarea mai multor modalitati pentru separarea frecvent,elor( combinat, ii între lungimileferestrelor, tipul acestora si numarul de es,antioane finale dorite) pot îmbunatat, i performant,ele.
33

Capitolul 5. Rezultate s, i Concluzii
De asemenea, es,antionarea nu a fost facuta in condit, ii de „studio“. Fit, ierele obt, inute nusunt de cea mai buna calitate. De asemenea, echipamentul folosit a fost bazat pe ideea de aobtine un „proof-of-concept“.
5.2.1. Direct, ii viitoare
Implementarea software poate fi de asemenea regândita. Momentan majoritatea codului estescris în Matlab, datorita facilitatii cu care se pot implementa s, i testa idei asupra prelucrariidatelor s, i a semnalelor. O implementare dedicata pentru scopul estimarii spat, iale ar puteacres,te viteza fata de prototipul actual.
În sfârs, it, combinând toate elementele de mai sus ment, ionate, obt, inerea unui sistem dedi-cat care poate realiza aceste calcule nu este imposibil de realizat. Pentru viteza se poate recurgela un FPGA pentru procesare, dar este o intreprindere de programare foarte mare.
Mult,umiri
Studentul dores,te sa mult,umeasca tuturor celor care s-au implicat în acest proiect. Mult,umirispeciale domnului profesor Bogdan Dumitrescu pentru evaluarea muncii mereu întârziate, dom-nului prof. Razvan Tataroiu pentru ajutorul acordat în dezvoltarea placutei de achizit, ie, priete-nilor Bogdan Istrate s, i Adrian Gas,par pentru sprijinul dat pentru realizarea ei, s, i de asemeneacolegilor Rares, Curatu si Cristian Tranca pentru programarea în LabView, ajutor fara de careevaluarea proiectului n-ar fi ramas decât una teoretica. De asemenea, doresc sa mult,umescfamiliei, prietenilor, profesorilor s, i colegilor, aflat, i în România sau pe alte meleaguri, care s, i-au acordat sprijinul, încrederea s, i mai ales parerile asupra punctelor unde lucrarea a putut fiîmbunatat, ita.
34
Anexe
35

A. Notat, ii
• fc, ωc: frecventa si pulsatia semnalului incident
• n: numarul de surse de semnal
• m: numarul de senzori (microfoane) dispobili
• N : numarul de es,antioane (necesare)
• Y ∈ Rm×N : matricea es,antioanelor. Cont, ine pe linii indexul microfonului, iar pe coloaneindexul es,antionului
• R: matrice de covariant, a a esantioanelor
• θ: unghiul semalului incident
• τi: intârzierea semnalului pentru microfonul i
• a (θ): vector de direct, ie
• wlen: ordinul FFT aplicat în cazul semnalelor de banda larga
• bins: numarul de ferestre peste care se aplica FFT.
36
Bibliografie
[1] Stoica, Petre s, i Moses, Randalph Spectral Analysis of Signals. Prentice Hall 2005.
[2] Adve, Raviraj ECE1515S: Smart Antennas 2007.
[3] Zumbahlen, Hank Linear Circuit Design Handbook. Newnes 2008.
[4] Vincent, Emmanuel Blind Audio Source Separation - A review of state-of-the-art techniques.2007.
[5] Boré, Gerhart and Peus, Stephan Microphones - Methods of Operation and Type Examples.Druck-Centrum Fürst GmbH, Berlin 1999.
37