L7 Incov Xy. Axial. Tors. Caz General
5
CAZUL GENERAL DE SOLICITARE ÎNCOVOIEREA BAREI ÎN PLANUL XY Elementul de bara încărcat cu sarcini dispuse paralel cu axa y este încovoiat după axa z (în planul xy). Deplasările extremităţilor şi forţele corespunzătoare acestora sunt reprezentate în figura 1, a. Prin rotaţia pozitivă cu 90 o în jurul axei x se obţine reprezentarea din figura 1, b. Comparând orientările forţelor şi deplasărilor din această figură cu cele din figura 1, a, se observă că relaţiile obţinute la încovoierea după y pot fi utilizate şi pentru încovoierea după z, făcând substituţiile: q z → q y ; I y → I z ; A fz → A fy ; χ z → χ y ; (1) F 1 , Δ 1 → F 5 , Δ 5 , F 3 , Δ 3 → F 7 , Δ 7 ; F 2 , Δ 2 → – F 6 , – Δ 6 , F 4 , Δ 4 → – F 8 , – Δ 8 . (2) F 6 , Δ 6 Fig. 1 Ultimele două substituţii impun nu numai schimbarea indicilor, ci şi a semnelor pe liniile şi coloanele pare din vectorul sarcinilor reduse la noduri şi din matricea de rigiditate de la încovoierea după axa y. Rezultă, ' '' l ' '' o 5 o o 6 o '' ' 7 o l 8 '' ' 1 ( )d (1 ) (2 / 2) (1 / 2) 3(1 ) 1 d (1 ) (2 / 2) (1 / 2) 3(1 ) z z y y z y z y y z z z z y y z y z y y m m q l x x l l m m Q Q Q m m qxx Q l l m m ⎧ ⎫ − + − ⎪ ⎪ +Φ ⎪ ⎪ ⎪ ⎪ +Φ − −Φ ⎧ ⎫ ⎪ ⎪ ⎪ ⎪ +Φ ⎪ ⎪⎪ ⎪ = = ⎨ ⎬⎨ ⎬ − ⎪ ⎪⎪ ⎪ + ⎪ ⎪⎪ ⎪ +Φ ⎩ ⎭ ⎪ ⎪ +Φ − −Φ ⎪ ⎪ − ⎪ ⎪ +Φ ⎩ ⎭ ∫ ∫ Q F , 2 2 3 2 2 12 6 12 6 6 (4 ) 6 (2 ) 12 6 12 6 (1 ) 6 (2 ) 6 (4 ) y y z z y y y l l l l l EI l l l l l l − l l ⎡ ⎤ ⎢ ⎥ +Φ − −Φ ⎢ ⎥ = ⎢ ⎥ − − − +Φ ⎢ ⎥ −Φ − +Φ ⎢ ⎥ ⎣ ⎦ k (3) unde ' o 2 0 6 ( )( )d l z z m M x l x l = − ∫ x , '' o 2 0 6 () d l z z m M xx l = ∫ x , 2 ' 2 24 (1 ) 12 y z z y fy fy I EI l GA lA χ +υ Φ = = . (4) Fig. 2 Observaţie. Sistemul de referinţă xyz considerat este cel folosit la studiul analitic al barelor şi plăcilor în multe din cursurile de Rezistenţa materialelor (inclusiv la Universitatea din Galaţi). Dacă sistemul de referinţă se dispune cu axa y orientată pe verticală în sus, ca în figura 2, b, expresiile pentru vectorul sarcinilor reduse la noduri şi matricea de rigiditate nu se modifică. Referitor la numerotarea locală a necunoscutelor, s-a preferat ordinea din figura 2, a celei din figura 2, b, respectându-se astfel succesiunea y, z pentru axele de încovoiere. BARA SOLICITATĂ AXIAL • Se consideră elementul de bară solicitat ca în figura 3, b prin forţele q x dispuse după axa barei. Vectorul sarcinilor reduse la noduri se obţine din condiţia evidentă Δl = 0, care se scrie sub forma 9 0 0 0 ( )d 1 d d 0 l l x q x Nx x F q x x EA EA ⎛ ⎞ ≡ − − ⎜ ⎟ ⎝ ⎠ ∫ ∫ ∫ = ⇔ ( ) 9 0 0 0 1 d d x l l q x x F l x q x xq x EA EA − − − = ∫ ∫ 0 , din care rezultă 9 0 1 ( )d l q x F q l x l =− − ∫ x . x q y F 7 , Δ 7 F 6 , Δ 6 y x F 8 , Δ 8 F 5 , Δ 5 F 5 , Δ 5 F 7 , Δ 7 EI z , GA fy ,χ y , l y F 8 , Δ 8 a) b) z EI z , GA fy ,χ y , l z q y Δ 5 x Δ 7 y Δ 8 F 6 F 8 F 7 Δ 6 F 5 z EI y , GA fy ,χ y , l a Δ 1 x Δ 3 y Δ 4 F 2 F 4 F 3 Δ 2 q y q y F 1 EI y , GA fy ,χ y , l z b
-
Upload
mihaela-solomon -
Category
Documents
-
view
213 -
download
0
description
L7 Incov Xy. Axial. Tors. Caz General
Transcript of L7 Incov Xy. Axial. Tors. Caz General

CAZUL GENERAL DE SOLICITARE
ÎNCOVOIEREA BAREI ÎN PLANUL XY
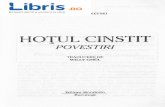
Elementul de bara încărcat cu sarcini dispuse paralel cu axa y este încovoiat după axa z (în planul xy). Deplasările extremităţilor şi forţele corespunzătoare acestora sunt reprezentate în figura 1, a. Prin rotaţia pozitivă cu 90o în jurul axei x se obţine reprezentarea din figura 1, b. Comparând orientările forţelor şi deplasărilor din această figură cu cele din figura 1, a, se observă că relaţiile obţinute la încovoierea după y pot fi utilizate şi pentru încovoierea după z, făcând substituţiile: qz → qy ; Iy → Iz ; Afz → Afy ; χz → χy ; (1) F1 , Δ1 → F5 , Δ5 , F3 , Δ3 → F7 , Δ7 ; F2 , Δ2 → – F6 , – Δ6 , F4 , Δ4 → – F8 , – Δ8 . (2)
F6 , Δ6
Fig. 1
Ultimele două substituţii impun nu numai schimbarea indicilor, ci şi a semnelor pe liniile şi coloanele pare din vectorul sarcinilor reduse la noduri şi din matricea de rigiditate de la încovoierea după axa y. Rezultă,
' ''
l
' ''o5o
o 6o '' '7o
l8'' '
1 ( ) d(1 )(2 / 2) (1 / 2)
3(1 )1 d
(1 )(2 / 2) (1 / 2)
3(1 )
z zy
y
z y z y
yz z
z zy
y
z y z y
y
m m q l x xl l
m mQQQ m m q x xQ l l
m m
⎧ ⎫−+ −⎪ ⎪+ Φ⎪ ⎪
⎪ ⎪+ Φ − − Φ⎧ ⎫ ⎪ ⎪⎪ ⎪ + Φ⎪ ⎪ ⎪ ⎪= = ⎨ ⎬ ⎨ ⎬−⎪ ⎪ ⎪ ⎪+⎪ ⎪ ⎪ ⎪+ Φ⎩ ⎭
⎪ ⎪+ Φ − − Φ⎪ ⎪−⎪ ⎪+ Φ⎩ ⎭
∫
∫Q F ,
2 2
3
2 2
12 6 12 66 (4 ) 6 (2 )12 6 12 6(1 )6 (2 ) 6 (4 )
y yzz
y
y y
l ll l lEI
l lll l l
−l
l
⎡ ⎤⎢ ⎥+ Φ − − Φ⎢ ⎥=⎢ ⎥− − −+ Φ⎢ ⎥
− Φ − + Φ⎢ ⎥⎣ ⎦
k (3)
unde
' o2 0
6 ( )( )dl
z zm M x l xl
= −∫ x , '' o2 0
6 ( ) dl
z zm M x xl
= ∫ x , 2 ' 2
24 (1 )12 y zzy
fy fy
IEIl GA l A
χ + υΦ = = . (4)
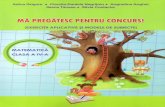
Fig. 2
Observaţie. Sistemul de referinţă xyz considerat este cel folosit la studiul analitic al barelor şi plăcilor în multe din cursurile de Rezistenţa materialelor (inclusiv la Universitatea din Galaţi). Dacă sistemul de referinţă se dispune cu axa y orientată pe verticală în sus, ca în figura 2, b, expresiile pentru vectorul sarcinilor reduse la noduri şi matricea de rigiditate nu se modifică. Referitor la numerotarea locală a necunoscutelor, s-a preferat ordinea din figura 2, a celei din figura 2, b, respectându-se astfel succesiunea y, z pentru axele de încovoiere.
BARA SOLICITATĂ AXIAL
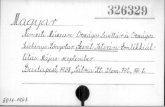
• Se consideră elementul de bară solicitat ca în figura 3, b prin forţele qx dispuse după axa barei. Vectorul sarcinilor reduse la noduri se obţine din condiţia evidentă Δl = 0, care se scrie sub forma
90 0 0
( ) d 1 d d 0l l x
q xN x x F q x x
EA EA⎛ ⎞≡ − −⎜ ⎟⎝ ⎠∫ ∫ ∫ = ⇔ ( )9
00 0
1 d dx llq
x xF l x q x xq xEA EA
− − − =∫ ∫ 0 , din care rezultă 90
1 ( )dl
q xF q l xl
= − −∫ x .
x
qy
F7 , Δ7 F6 , Δ6 y
x
F8 , Δ8
F5 , Δ5
F5 , Δ5 F7 , Δ7
EIz , GAfy ,χy , l
y
F8 , Δ8
a) b)
z
EIz , GAfy ,χy , l
z qy
Δ5
x
Δ7
y Δ8
F6
F8
F7
Δ6
F5
z
EIy , GAfy ,χy , l
a
Δ1
x
Δ3
y Δ4
F2
F4
F3
Δ2qy qy
F1 EIy , GAfy ,χy , l
z b

STATICA STRUCTURILOR
2
Din ecuaţia de echilibru se mai obţine 9 10 0d 0
l
q q xF F q x+ + =∫ 10 0
1 dl
q xF xq xl
= − ∫ . Componentele F9q , F10q ale
vectorului forţelor care apar la extremităţile fixe ale elementului de bară formează vectorul notat Faq . El este egal şi de sens contrar cu vectorul sarcinilor de pe deschidere reduse la noduri, . Se poate deci scrie o
a = −Q Faq
o
09o 9o
10 90
1 ( )d
1 d
l
xq
a aq lqx
q l x xF Q lF Q q x x
l
⎧ ⎫−⎪ ⎪− ⎧ ⎫⎧ ⎫⎪ ⎪ ⎪ ⎪ ⎪= − = = =⎨ ⎬ ⎨ ⎬ ⎨−⎪ ⎪ ⎪ ⎪⎩ ⎭ ⎩ ⎭
⎪⎬
⎪ ⎪⎪ ⎪⎩ ⎭
∫
∫Q F . (5)
qx qx ≠ 0
Fig. 3 • Pentru obţinerea matricei de rigiditate a elementului solicitat axial, se consideră bara din fig. 3, c fără sarcini pe
deschidere, cu deplasări Δ9 , Δ10 la extremităţi. Întrucât Δl = Δ10 – Δ9, unde 9( )F ll
EAΔ−
Δ = , rezultă 9 9( )EAFlΔ = Δ − Δ10
iar din ecuaţia de echilibru se mai obţine 9 10 0F FΔ Δ+ = 10 10 9(EAFlΔ )= Δ − Δ . Rezultă
9
10
1 11 1a a
EAlΔ
Δ− ⎧ ⎫⎡ ⎤= =⎨ ⎬⎢ ⎥ Δ−⎣ ⎦ ⎩ ⎭
F k aΔ , (6)
unde ka este matricea de rigiditate a elementului de bară solicitat axial,
1 1 1 11 1 1 1a a
EA kl
− −⎡ ⎤ ⎡= =
⎤⎢ ⎥ ⎢− − ⎥⎣ ⎦ ⎣
k⎦
a
. (7)
Ecuaţia elementului de bară solicitat axial este deci
. (8) oa a a −F = k QΔ
Matricea ka se putea obţine şi cu relaţia generală, acceptând pentru deplasarea axială legea liniară de interpolare
cu ajutorul polinoamelor Lagrange de grad zero, 9( ) 1 10x xu x . Elementului solicitat axial este cel mai simplu
element de bară iar matricea sa de rigiditate are cea mai simplă structură. Din l l
⎛ ⎞= Δ − + Δ⎜ ⎟⎝ ⎠
(6) se observă că pentru Δ9 = 0 (v. şi fig. 3, d), se obţine ecuaţia legăturii elastice simple de translaţie.
BARA SOLICITATĂ LA TORSIUNE
• Dacă sub acţiunea unor încărcări ce produc torsiunea barei deplanările secţiunilor acesteia nu sunt împiedicate, solicitarea este de torsiune liberă. În acest caz în bară apar numai tensiuni tangenţiale, numite Saint-Venant, care se determină cu relaţii ce depind de tipul secţiunii, deschisă sau închisă (simplu sau multiplu). Ele depind de răsucirea specifică, '
xθ = Mx / GIt , unde Mx este momentul de torsiune iar It este momentul de inerţie la torsiune, dependent de tipul secţiunii. De obicei răsucirea barei este cauzată de deplasările extremităţilor ca urmare a conexiunilor cu alte elemente.
Aceste deplasări şi momentele corespunzătoare (v. fig. 4, a) se notează 11 11
12 12
,t t
FFΔ
Δ⎧ ⎫ ⎧= =
⎫⎨ ⎬ ⎨Δ⎩ ⎭ ⎩ ⎭
FΔ ⎬ . Ţinând seama de analogia
formală între relaţiile de calcul la torsiune şi cele de la solicitarea axială (v. figurile 3 şi 4), se poate scrie
FtΔ = kt Δt , (9) unde matricea de rigiditate este dată de expresia
1 1 1 11 1 1 1
tt t
GI kl
− −⎡ ⎤ ⎡= =
⎤⎢ ⎥ ⎢− − ⎥⎣ ⎦ ⎣
k⎦
. (10)
EAF Cl
= Δ = Δ
≡ + x l
F9q F10q
Δ9 = 0 Δ10 = 0 b)
F9Δ F10Δ
Δ10 ≠ 0Δ9 ≠ 0 qx = 0 c
x
EA F9 F10 Δ9 Δ10
a) l
+ EA, l
Δd)x l

Cazul general de solicitare
3 În absenţa momentelor distribuite qxx, momentul de torsiune şi răsucirea specifică rezultă constante (v. şi fig. 4, b), conform legii liniare care a fost acceptată pentru unghiul de răsucire θ(x),
11 12( ) 1 (0) ( ) 1x x xx x xx ll l l
⎛ ⎞ ⎛ ⎞θ = − θ + θ = Δ − + Δ⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
xl
. (11)
GIt
Fig. 4 Dacă pe lungimea l a elementului sunt aplicate şi momente distribuite qxx (v. fig. 4, c), momentele reduse la noduri se deduc folosind relaţii similare cu (5),
o
0o 11o12
0
1 ( ) d
1 d
l
xx
t l
xx
q l x xQ lQ q x x
l
⎧ ⎫−⎪ ⎪⎧ ⎫⎪ ⎪ ⎪ ⎪= =⎨ ⎬ ⎨ ⎬⎪ ⎪⎩ ⎭ ⎪ ⎪
⎪ ⎪⎩ ⎭
∫
∫Q . (12)
BARA SOLICITATĂ SPAŢIAL
Deplasările şi forţele de la extremităţile unui element solicitat spaţial sunt reprezentate în figura 5, a, unde simbolurilor folosite pentru notarea deplasărilor şi forţelor nodale li s-au adăugat indicii “ '
“. Se mai introduc notaţiile ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' '
1 2 3 4 5 6 7 8 9 10 11 12{ } {T T T T T Ty z a t= = Δ Δ Δ Δ Δ Δ Δ Δ Δ ΔΔ Δ Δ Δ Δ }Δ Δ ,
' ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' '1 2 3 4 5 6 7 8 9 10 11 12{ } {T T T T T T
y z a t F F F F F F F F F F F F= =F F F F F } . (13)
Fig. 5 Observaţie. În figura 5 şi în notaţiile (13) nu au fost incluse gradele de libertate şi forţele generalizate corespunzătoare răsucirii împiedicate. Dacă s-ar ţine seama şi de împiedicarea deplanărilor, ar apare 14 deplasări şi forţe generalizate. Matricea de rigiditate a elementului de bară solicitat spaţial se poate scrie ca o matrice celulară cvasidiagonală, ale cărei elemente sunt matricele de rigiditate stabilite separat pentru încovoierea după y, încovoiere după z, axială şi de torsiune,
Mx Mx
Mx = (Δ12 – Δ11)GIt / lb)
x l
Δ11 F11 F12 21 Δ12
a)
θx(x GItΔ11 = θx(0) Δ12 = θx(l)
GIt
x l
qxx Δ12 = 0o11Q o
12QΔ11 = 0 c
F '11 , Δ'11 F '9 , Δ'
9 F '10 , Δ'10 F '12 , Δ'
12 x
y z
F '1 , Δ'1
F '6 , Δ'6
F '5 , Δ'5
F '2 , Δ'2
F '3 , Δ'3
F '8 , Δ'8
F '7 , Δ'7
F '4 , Δ'4a
F F4 , Δ 1 , Δ1 F
z
F3 , Δ3
F6 , Δ6
F2 , Δ2
F5 , Δ5
7 , Δ F10 , Δ10 x 4 7
bF9 , Δ9
F12 , Δ12
F8 , Δ8
F11 , Δ11
y

STATICA STRUCTURILOR
4
'
''
'
'
y
z
a
t
⎡ ⎤⎢ ⎥⎢ ⎥= ⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
k 0 0 00 k 0 0
k0 0 k 00 0 0 k
. (14)
Făcând înlocuirile, se obţine matricea k' sub forma dezvoltată,
2 2
2 2
'
0 0 0 0 0 0 012 6 12 60 0 0 0 0 0 06 (4 ) 6 (2 )0 0 0 0 0 0 012 6 12 60 0 0 0 0 0 06 (2 ) 6 (4 )
12 6 12 6 0 00 0 0 00 0 0 00 0 0 00 0 0 00 0 0 00 0 0 00 0 0 00 0 0 0
y y y y
y z y y z y
y y y y
y z y y z y
y y y y
k lk k lklk l k lk l kk lk k lk
lk l k lk l kk lk k lk
− − −⎡⎢ − + Φ − Φ⎢⎢−⎢
− − Φ + Φ⎢⎢ −⎢⎢= ⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
k
0000
2 2
2 2
0 06 (4 ) 6 (2 ) 0 0 0 012 6 12 6 0 0 0 06 (2 ) 6 (4 ) 0 0 0 0
0 0 0 0 00 0 0 0 00 0 0 0 0 00 0 0 0 0 0
y y y y y y
y y y y
y y y y y y
a a
a a
t t
t t
lk l k lk l kk lk k lk
lk l k lk l kk kk k
k kk k
⎤
00
⎥⎥⎥⎥⎥⎥⎥
+ Φ − − Φ ⎥⎥− − − ⎥
− Φ − + Φ ⎥⎥− ⎥⎥−⎥
− ⎥⎥− ⎥⎦
, (15)
unde s-au folosit notaţiile: 3
12(1 )
yy
z
EIk
l=
+ Φ ,
312(1 )
zz
y
EIkl
=+ Φ
, a
EAkl
= , tt
GIkl
= . Cu numerotarea din figura 5, a,
ecuaţia elementului solicitat spaţial are expresia F ' = k' Δ' – Qo' , (16) unde s-a mai notat o ' o ' o ' o ' o ' o ' o ' o ' o ' o ' o ' o ' o ' o ' o ' o ' o '
1 2 3 4 5 6 7 8 9 10 11 12{ } {T T T T T Ty z a t Q Q Q Q Q Q Q Q Q Q Q Q= =Q Q Q Q Q } . (17)
Pentru calculul automat, este convenabil ca deplasările şi forţele nodale să fie numerotate nu după solicitări ca în figura 5, a, ci după axe ca în figura 5, b. În acest sistem de numerotare se introduc vectorii 1 2 3 4 5 6 7 8 9 10 11 12{ }T= Δ Δ Δ Δ Δ Δ Δ Δ Δ Δ Δ ΔΔ , (18)
1 2 3 4 5 6 7 8 9 10 11 12{ }TF F F F F F F F F F F F=F , o o o o o o o o o o o o o1 2 3 4 5 6 7 8 9 10 11 12{ }TQ Q Q Q Q Q Q Q Q Q Q Q=Q . (19)
Elementele vectorului Δ au semnificaţii care rezultă din următoarea formă de scriere (v. fig. 5, a), 1 1 1 1 1 1 2 2 2 2 2 2{ ( ) ( ) ( ) ( T
x y z x y zu v w u v w= θ θ θ θ θ θΔ ) }
2
, (20) unde indicii 1 şi 2 se referă la secţiunile x = 0 respectiv x = l, iar ' ' ' '
1 1 1 1 1 1 2 2 2 2 2, , ,s s sy y z z y y zw v w vθ + θ θ + θ θ + θ θ + θ= − = = − = s
z . (21) Trecerea de la numerotare din figura 5, b la cea din figura 5, a se realizează prin relaţiile de transformare Δ' = λB Δ ; F ' = λB F ; Qo' = λB Qo , (22) unde λB conţine numai elemente 0 şi 1 (matrice tip Boole). Ea se obţine prin simpla examinare a figurilor 5, a şi 5, b,
'1'2'3'4'5'6'7'8'9'10'11'12
0 0 1 0 0 0 0 0 0 0 0 00 0 0 0 1 0 0 0 0 0 0 00 0 0 0 0 0 0 0 1 0 0 00 0 0 0 0 0 0 0 0 0 1 00 1 0 0 0 0 0 0 0 0 0 00 0 0 0 0 1 0 0 0 0 0 00 0 0 0 0 0 0 1 0 0 0 00 0 0 0 0 0 0 0 0 0 0 11 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 1 0 0 0 0 00 0 0 1 0 0
⎧ ⎫Δ⎪ ⎪Δ⎪ ⎪Δ⎪ ⎪
Δ⎪ ⎪Δ⎪ ⎪
⎪ ⎪⎪ ⎪Δ =⎨ ⎬Δ⎪ ⎪Δ⎪ ⎪Δ⎪ ⎪
⎪ ⎪Δ⎪ ⎪Δ⎪ ⎪Δ⎪ ⎪⎩ ⎭
1
2
3
4
5
6
7
8
9
10
11
12
0 0 0 0 0 00 0 0 0 0 0 0 0 0 1 0 0
Δ⎧ ⎫⎡ ⎤⎪ ⎪Δ⎢ ⎥⎪ ⎪Δ⎢ ⎥⎪ ⎪⎢ ⎥ Δ⎪ ⎪⎢ ⎥ Δ⎪ ⎪⎢ ⎥ ⎪ ⎪Δ⎨ ⎬⎢ ⎥ Δ⎪ ⎪⎢ ⎥ Δ⎪ ⎪⎢ ⎥ Δ⎪ ⎪⎢ ⎥ Δ⎪ ⎪⎢ ⎥ Δ⎪ ⎪⎢ ⎥⎢ ⎥ Δ⎣ ⎦ ⎪ ⎪⎩ ⎭
. (23)
Matricea λB fiind ortogonală (det λB = 1), se poate scrie Δ = TBλ Δ', F = T
Bλ F ', Qo = T
Bλ Qo'. Se fac înlocuirile în
(16): λB F = k' λB Δ – λB Qo. Înmulţind la stânga relaţia obţinută cu TBλ , se obţine ecuaţia elementului de bară în
numerotarea din figura 5, b, F = k Δ – Qo , (24) unde k = T
Bλ k' λB . (25)

Cazul general de solicitare
5 Toate elementele matricei k'
12 x 12 se regăsesc în k12 x 12, însă matricea k nu mai are forma cvasidiagonală, elementele ei fiind împrăştiate conform numerotării din fig. 5, b. Ea se găseşte în orice carte de MEF. În numerotarea din figura 5, b, ecuaţia barei solicitată spaţial este de forma,
K Δ = Q , ( k + C ) Δ = Q* + Qo , (26)
unde 1 1 1 1 1 1 2 2 2 2 2 2x y z xr yr zr x y z xr yr zrC C C C C C C C C C C C=C , * * * * * * * * * * * * *1 2 3 4 5 6 7 8 9 10 11 12{ }TQ Q Q Q Q Q Q Q Q Q Q Q=Q .