Franarea masinilor de curent continuu - memm.utcluj.ro · Sa se calculeze treptele rezistentei de...
27
Frânarea mainilor de curent continuu Metode de frânare
Transcript of Franarea masinilor de curent continuu - memm.utcluj.ro · Sa se calculeze treptele rezistentei de...
Frânarea maşinilor de curentcontinuu
Metode de frânare
Metode de frânare
• Scop– reducerea vitezei,– menţinerea vitezei
• Rezultate– oprirea utilajului,– funcţionare la viteză
mai redusă,– funcţionare la viteză
constantă.
Metode de frânare
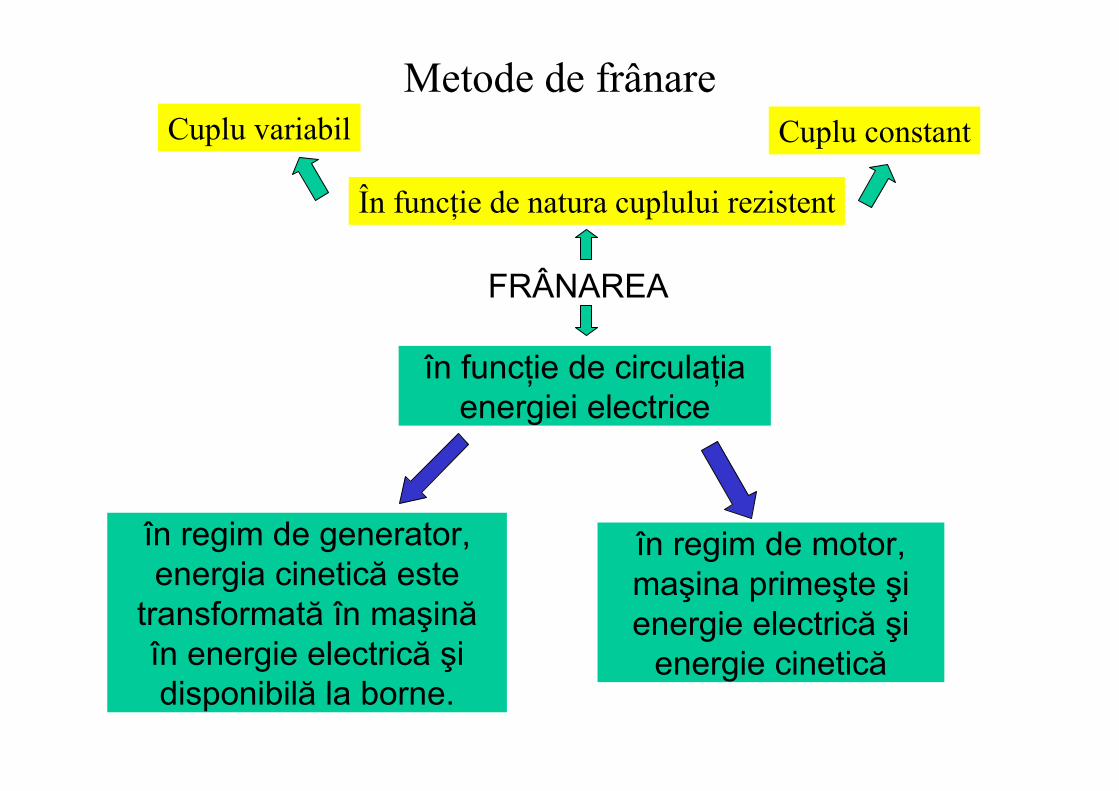
FRÂNAREA
în regim de generator,energia cinetică este
transformată în maşinăîn energie electrică şidisponibilă la borne.
în regim de motor,maşina primeşte şienergie electrică şi
energie cinetică
în funcţie de circulaţiaenergiei electrice
În funcţie de natura cuplului rezistent
Cuplu variabil Cuplu constant
Metode de frânare
• Regim de generator– independent; energia
electrică este consumatăîn rezistenţe.Frânare reostatică saudinamică
– cuplat la sursă; energiaelectrică este recuperată.Frânare cu recuperare
• Regim de motor– energia electrică
consumată vadetermina micşorareaenergiei cinetice autilajului.Frânare prin contra-conectare
Posibilităţi de realizare
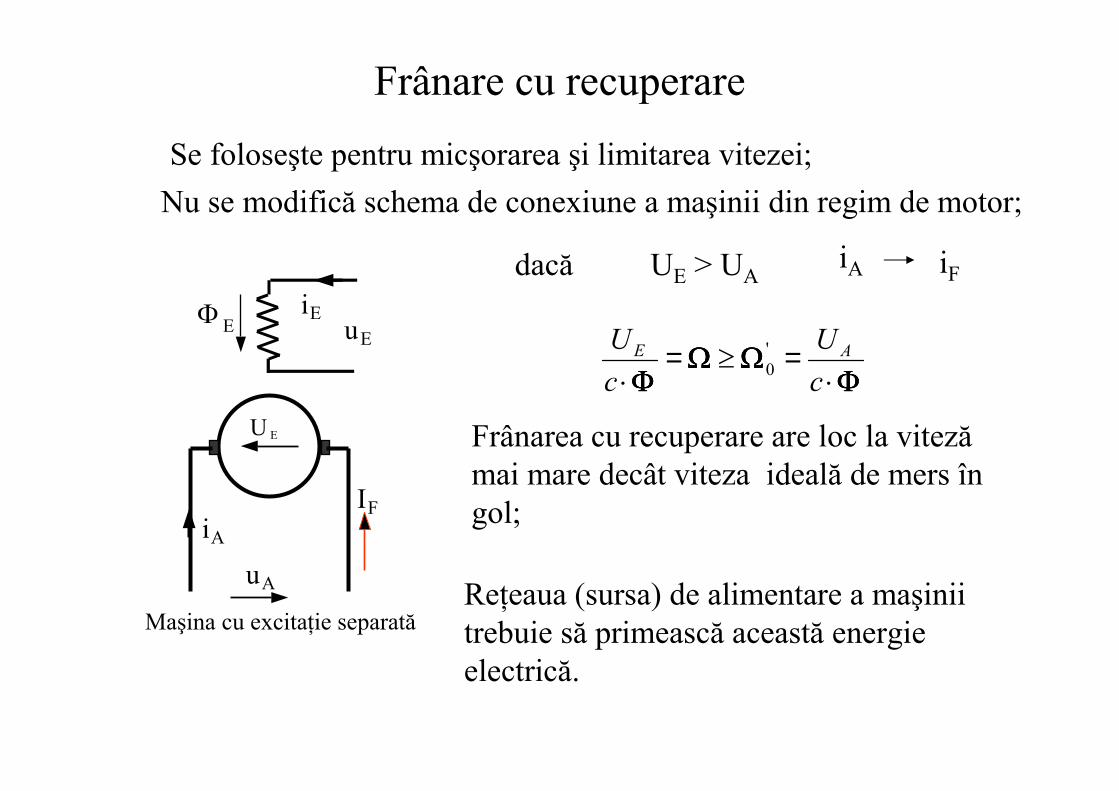
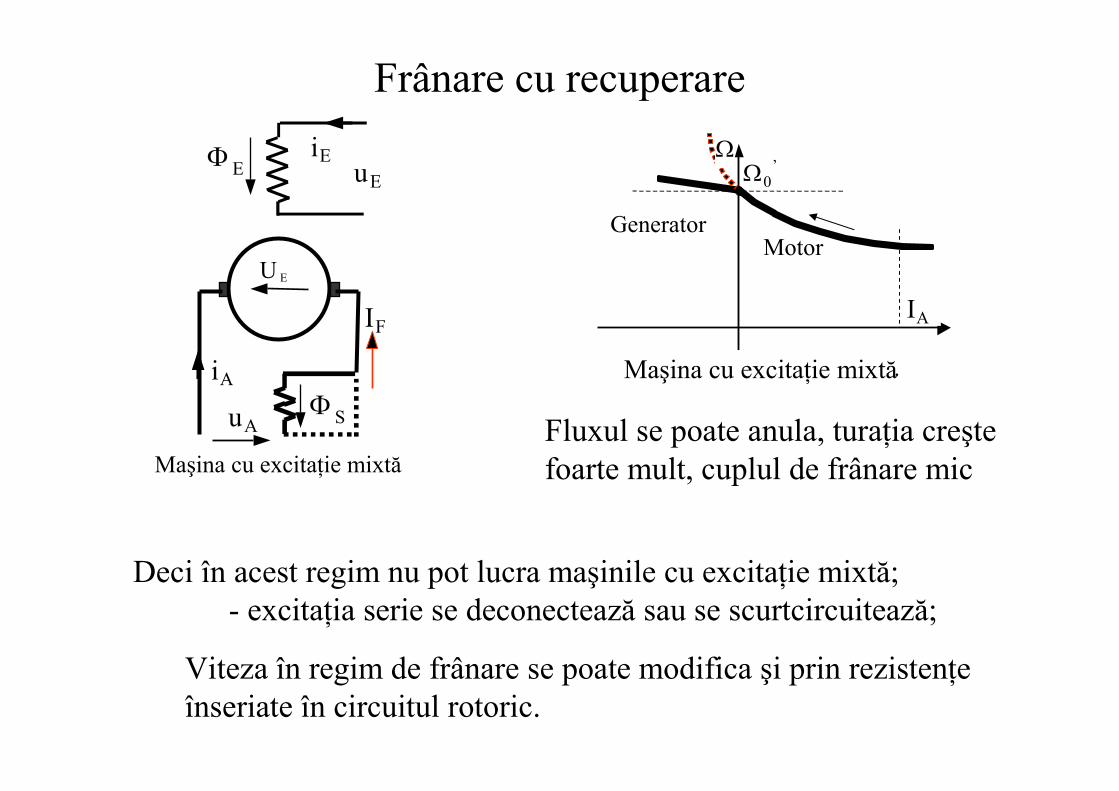
Frânare cu recuperare
Se foloseşte pentru micşorarea şi limitarea vitezei;Nu se modifică schema de conexiune a maşinii din regim de motor;
Reţeaua (sursa) de alimentare a maşiniitrebuie să primească această energieelectrică.
Frânarea cu recuperare are loc la vitezămai mare decât viteza ideală de mers îngol;iA
IF
Φ E uE
iE
U E
uA
Maşina cu excitaţie separată
dacă UE > UAiA
ΦΦΦΦΩΩΩΩΩΩΩΩ
ΦΦΦΦ ⋅=≥=
⋅ cU
cU AE '
0
iF
Frânare cu recuperare
( )F
EcEE
FAA
IcCIRRUcIRU
⋅Φ⋅=⋅+=
Ω⋅Φ⋅+⋅=
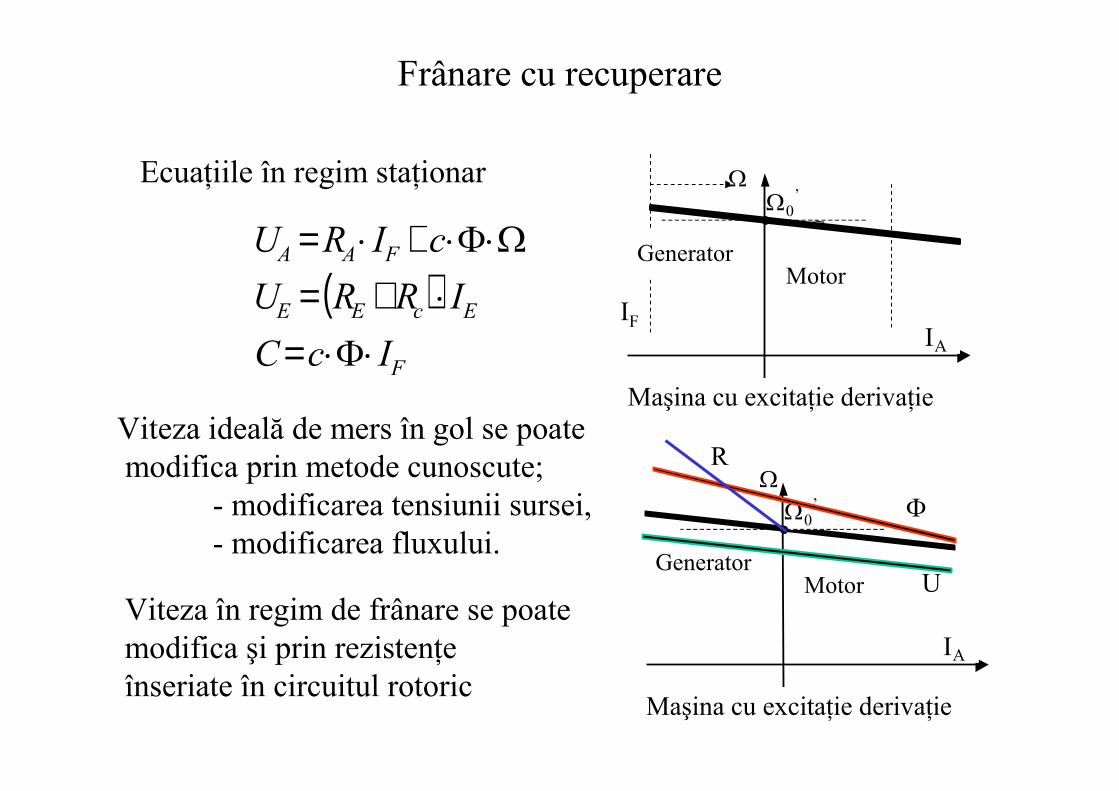
Ecuaţiile în regim staţionar
ΩΩ0
’
IA
GeneratorMotor
Maşina cu excitaţie derivaţie
IF
Viteza ideală de mers în gol se poatemodifica prin metode cunoscute;
- modificarea tensiunii sursei,- modificarea fluxului.
ΩΩ0
’
IA
GeneratorMotor
Maşina cu excitaţie derivaţie
U
Φ
Viteza în regim de frânare se poatemodifica şi prin rezistenţeînseriate în circuitul rotoric
R
Frânare cu recuperareΩΩ0
’
IA
GeneratorMotor
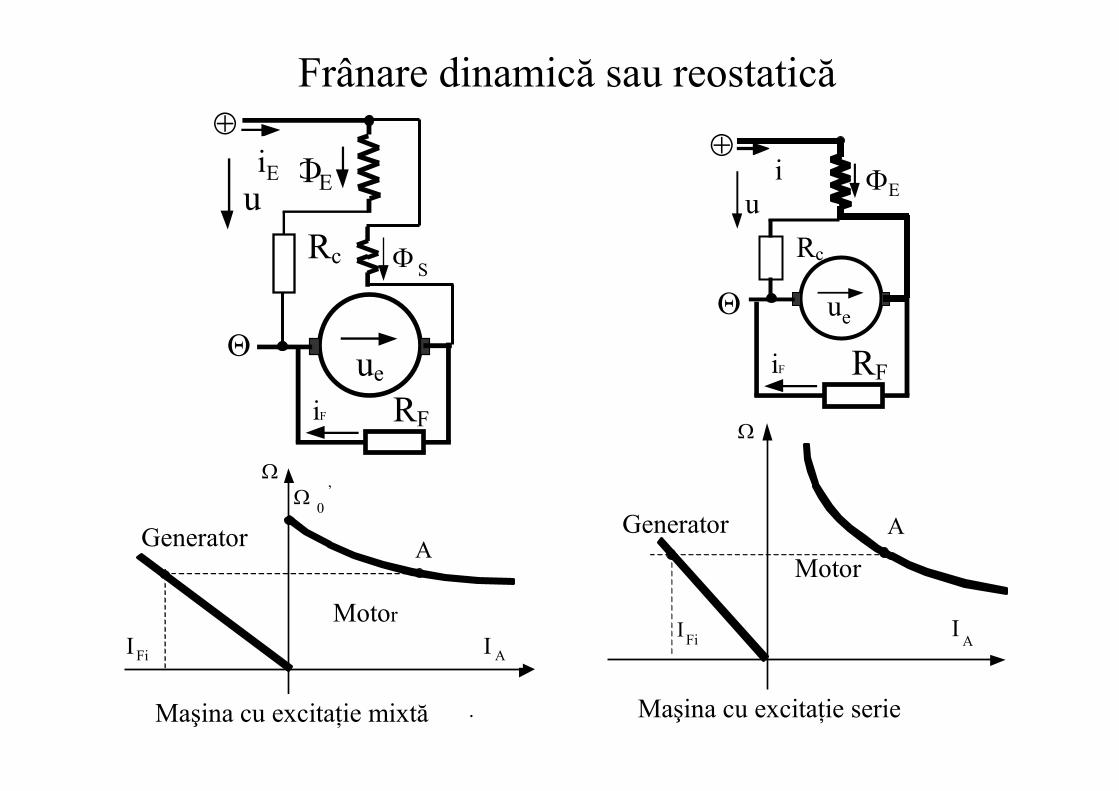
Maşina cu excitaţie mixtă.
Deci în acest regim nu pot lucra maşinile cu excitaţie mixtă;- excitaţia serie se deconectează sau se scurtcircuitează;
Viteza în regim de frânare se poate modifica şi prin rezistenţeînseriate în circuitul rotoric.
Φ S
ΦE uE
iE
U E
uA
Maşina cu excitaţie mixtă
iA
IF
Fluxul se poate anula, turaţia creştefoarte mult, cuplul de frânare mic
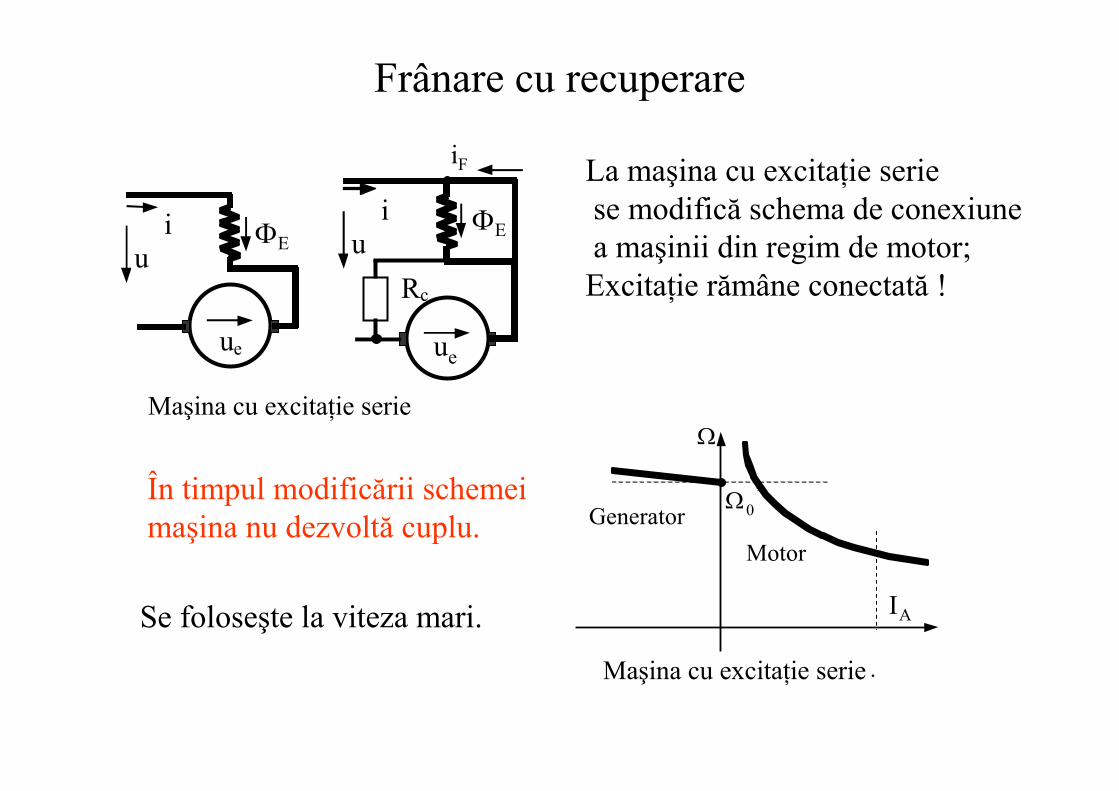
Frânare cu recuperare
Maşina cu excitaţie serie
Rc
iF
ΦEui
ue
ΦEui
ue
Maşina cu excitaţie serie .
Ω0’
Motor
Ω
IA
Generator
La maşina cu excitaţie seriese modifică schema de conexiunea maşinii din regim de motor;
Excitaţie rămâne conectată !
În timpul modificării schemeimaşina nu dezvoltă cuplu.
Se foloseşte la viteza mari.
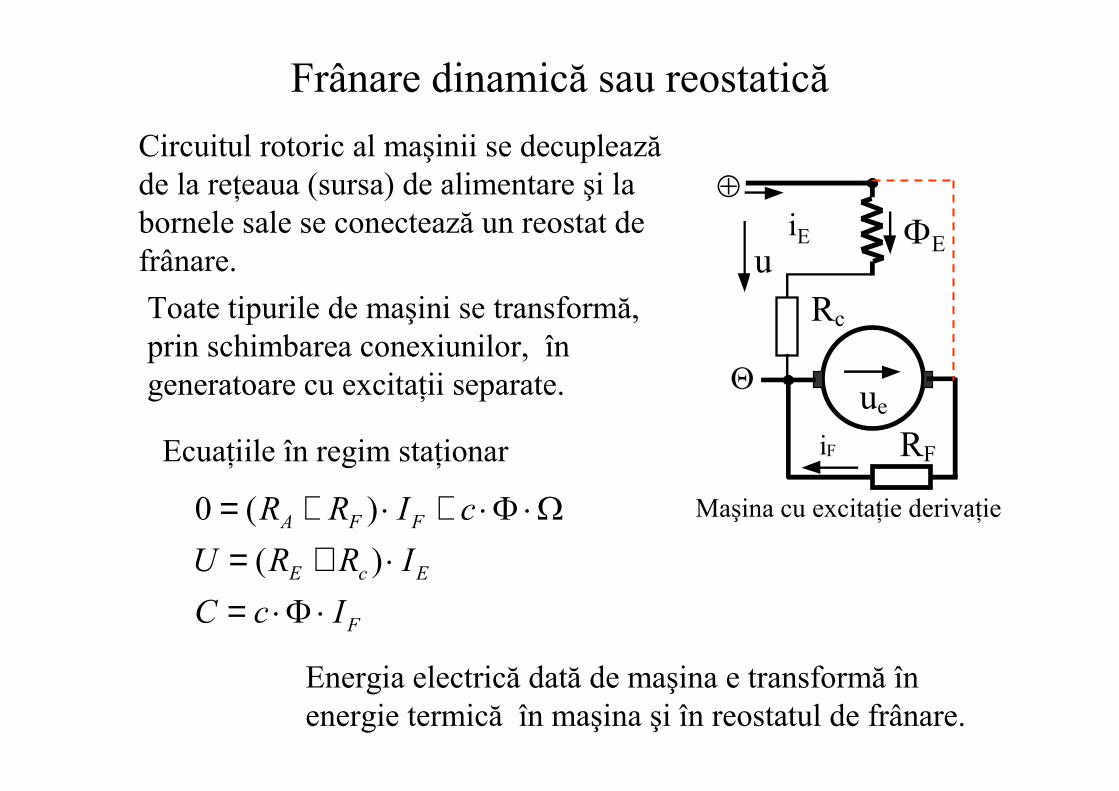
Frânare dinamică sau reostaticăCircuitul rotoric al maşinii se decupleazăde la reţeaua (sursa) de alimentare şi labornele sale se conectează un reostat defrânare.
RFiF
⊕ΦEu
i
ue
Rc
Θ
Maşina cu excitaţie derivaţie
F
EcE
FFA
IcCIRRU
cIRR
⋅Φ⋅=⋅+=
Ω⋅Φ⋅+⋅+=)()(0
Toate tipurile de maşini se transformă,prin schimbarea conexiunilor, îngeneratoare cu excitaţii separate.
Energia electrică dată de maşina e transformă înenergie termică în maşina şi în reostatul de frânare.
Ecuaţiile în regim staţionar
iE
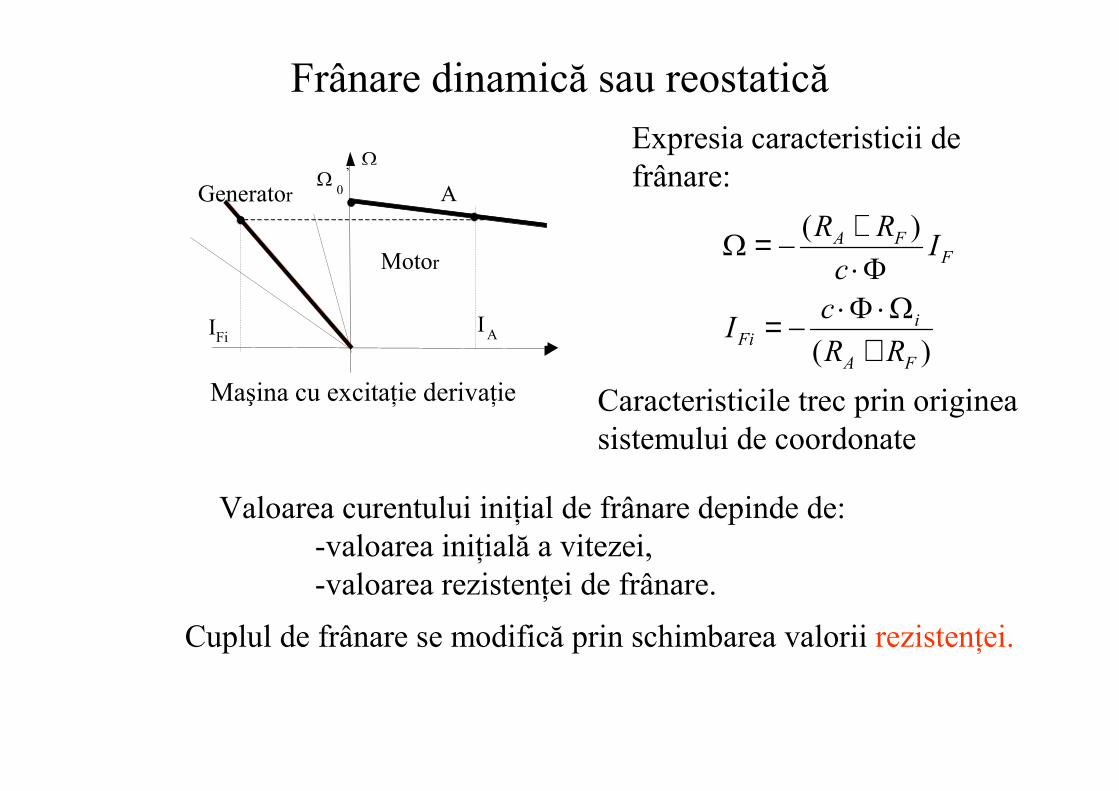
Frânare dinamică sau reostatică
)(
)(
FA
iFi
FFA
RRcI
IcRR
+Ω⋅Φ⋅
−=
Φ⋅+
−=Ω
Valoarea curentului iniţial de frânare depinde de:-valoarea iniţială a vitezei,-valoarea rezistenţei de frânare.
Expresia caracteristicii defrânare:
Cuplul de frânare se modifică prin schimbarea valorii rezistenţei.
Maşina cu excitaţie derivaţie
AGenerator
ΩΩ 0
’
IA
Motor
IFi
Caracteristicile trec prin origineasistemului de coordonate
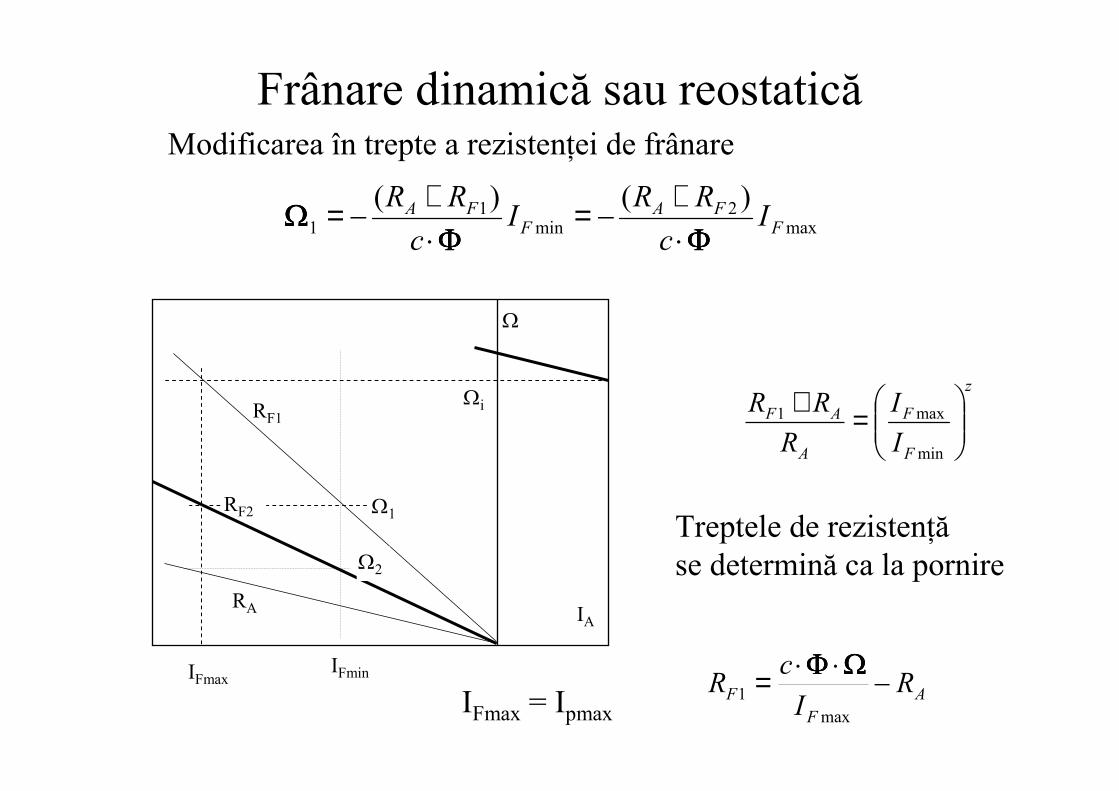
Frânare dinamică sau reostatică
max2
min1
1)()(
FFA
FFA I
cRRI
cRR
ΦΦΦΦΦΦΦΦΩΩΩΩ
⋅+
−=⋅+
−=
IFmax
IA
Ωi
Ω
Ω1RF2
z
F
F
A
AF
II
RRR
=+
min
max1
Modificarea în trepte a rezistenţei de frânare
RF1
IFmin
Ω2
RA
Treptele de rezistenţăse determină ca la pornire
IFmax = IpmaxA
FF R
IcR −
⋅⋅=max
1ΩΩΩΩΦΦΦΦ
Frânare dinamică sau reostatică
A
ΩΩ 0
’
I A
Generator
Motor
Maşina cu excitaţie mixtă .
I Fi
Maşina cu excitaţie serie
IFi
A
Motor
Ω
I A
Generator
Rc
RFiF
ueΘ
⊕ΦEu
i
Rc
iE
ΦS
RFiF
ΦEui
ue
⊕
Θ
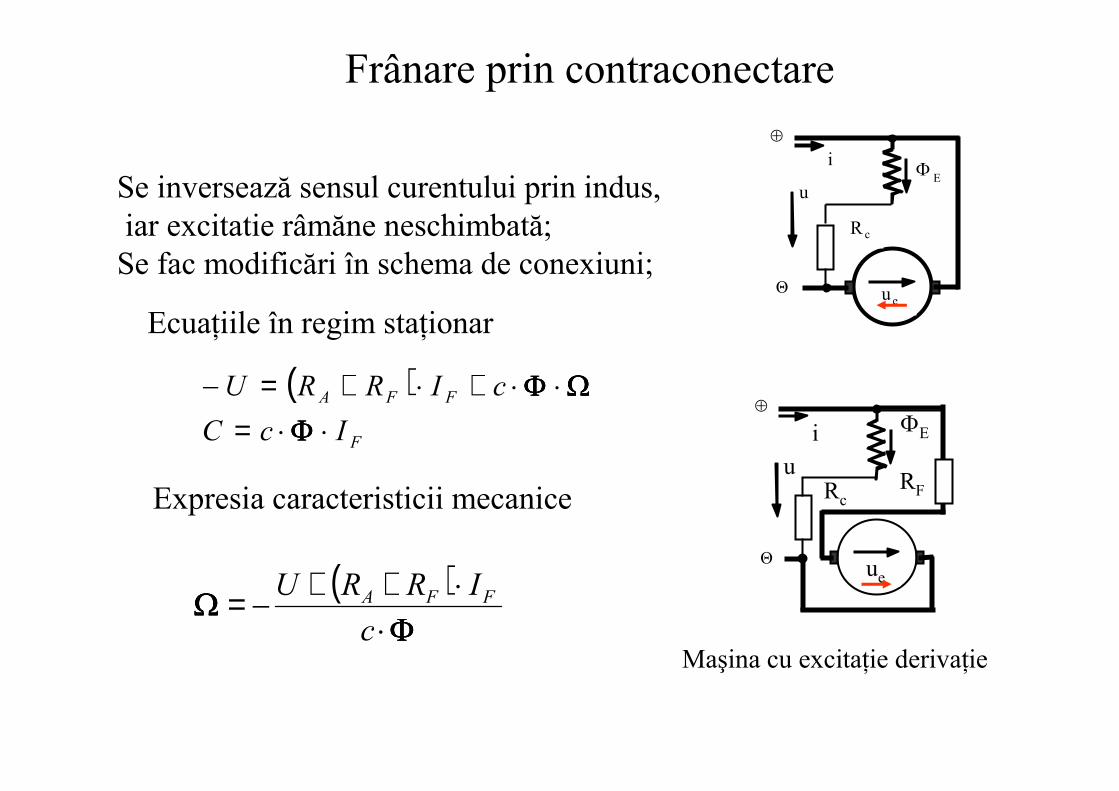
Frânare prin contraconectare
Se inversează sensul curentului prin indus,iar excitatie râmăne neschimbată;
Se fac modificări în schema de conexiuni;
Maşina cu excitaţie derivaţie
( )F
FFA
IcCcIRRU
⋅⋅=⋅⋅+⋅+=−
ΦΦΦΦΩΩΩΩΦΦΦΦ
( )ΦΦΦΦ
ΩΩΩΩ⋅
⋅++−=
cIRRU FFA
Ecuaţiile în regim staţionar
Φ Eu
i
ue
R c
Θ
⊕
RFRc
ΦΕ
ui
ueΘ
⊕
Expresia caracteristicii mecanice
Frânare prin contraconectare
Maşina cu excitaţie derivaţie
B
IFi
'0
Ω−
RA
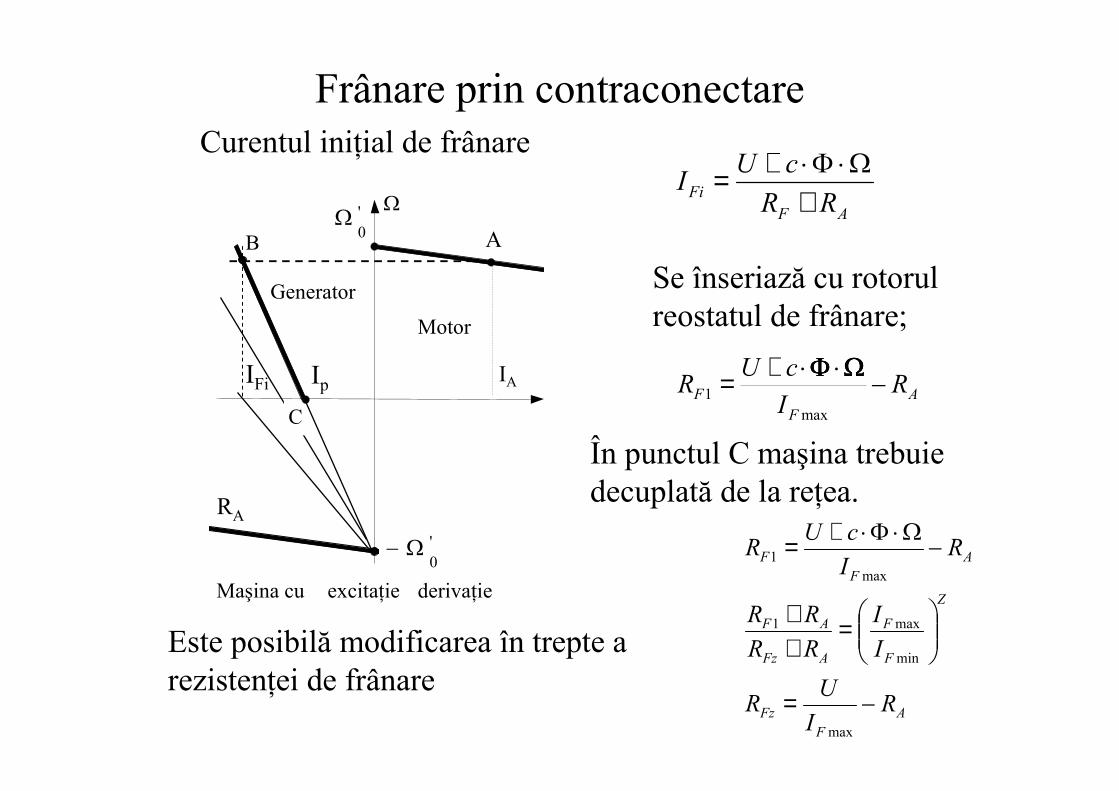
AF
Fz
Z
F
F
AFz
AF
AF
F
RIUR
II
RRRR
RIcUR
−=
=
++
−Ω⋅Φ⋅+=
max
min
max1
max1
AFFi RR
cUI+
Ω⋅Φ⋅+=
Se înseriază cu rotorulreostatul de frânare;
Curentul iniţial de frânare
A'0
Ω
IA
Generator
Ω
Motor
C
Ip AF
F RIcUR −
⋅⋅+=max
1ΩΩΩΩΦΦΦΦ
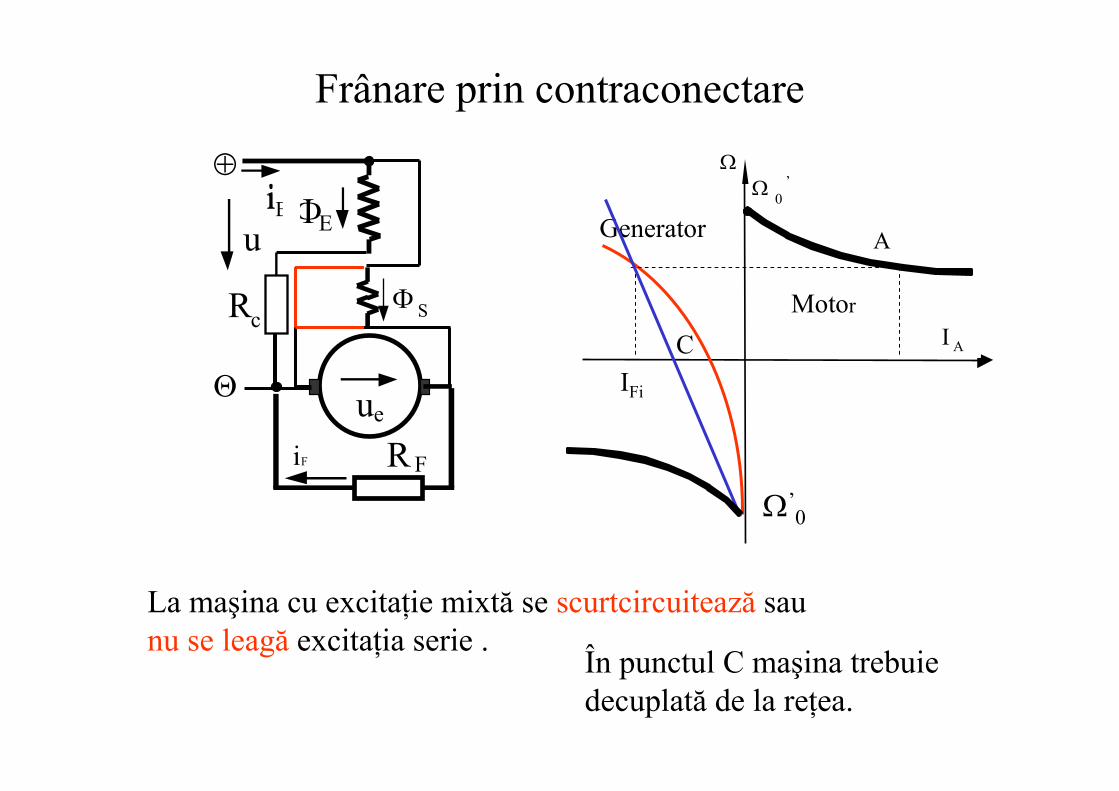
În punctul C maşina trebuiedecuplată de la reţea.
Este posibilă modificarea în trepte arezistenţei de frânare
Frânare prin contraconectare
La maşina cu excitaţie mixtă se scurtcircuitează saunu se leagă excitaţia serie .
R FiF
iE
ΦS
ue
⊕ΦEu
i
Rc
Θ
A
ΩΩ 0
’
I A
Generator
Motor
Ω’0
IFi
În punctul C maşina trebuiedecuplată de la reţea.
C
Frânare prin contraconectare
Maşina cu excitaţie serie
CIp IA
Generator
Ω
Motor
AB
IFi
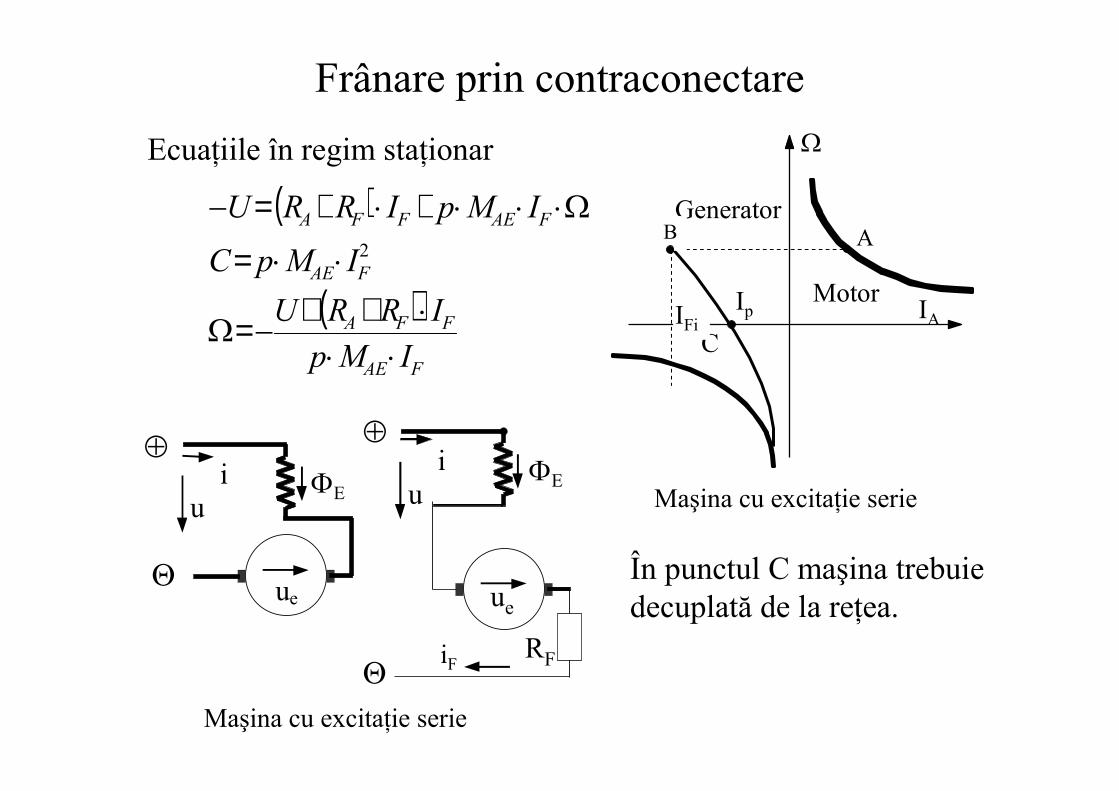
( )
( )FAE
FFA
FAE
FAEFFA
IMpIRRU
IMpCIMpIRRU
⋅⋅⋅++
−=Ω
⋅⋅=
Ω⋅⋅⋅+⋅+=−2
Maşina cu excitaţie serie
ΦEui
ue
⊕
Θ
iF
ΦEui
ue
RF
⊕
Θ
Ecuaţiile în regim staţionar
În punctul C maşina trebuiedecuplată de la reţea.
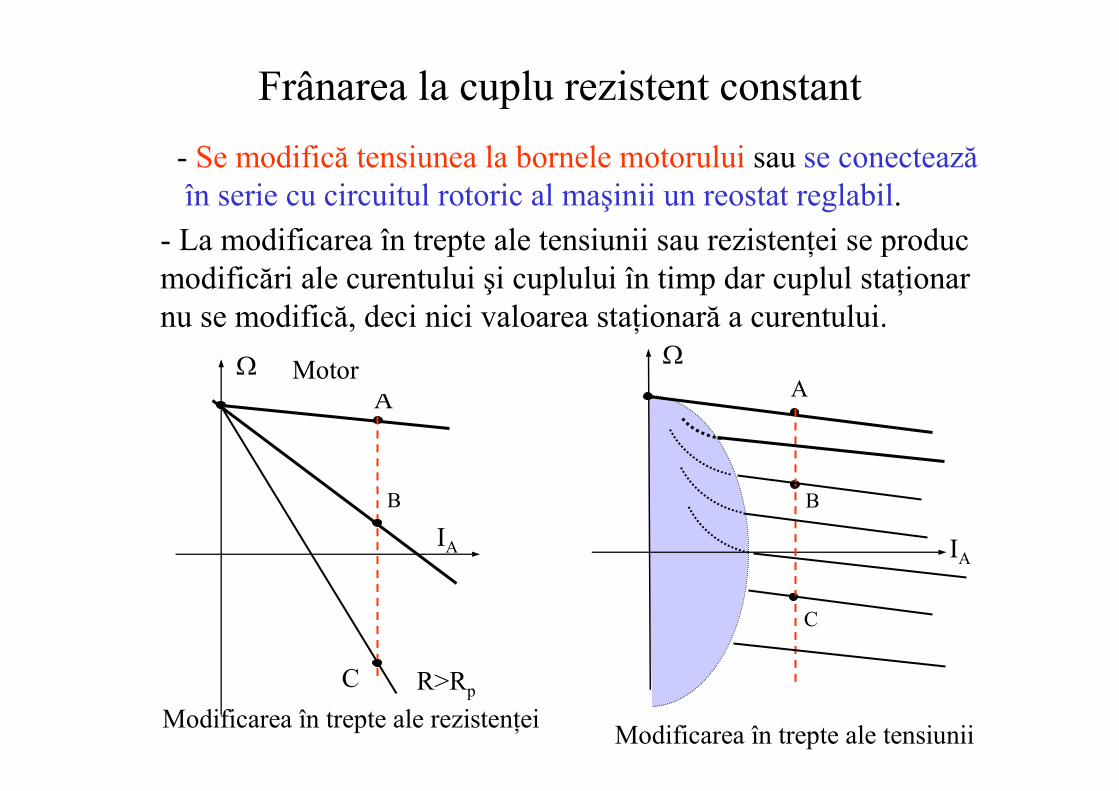
Frânarea la cuplu rezistent constant- Se modifică tensiunea la bornele motorului sau se conecteazăîn serie cu circuitul rotoric al maşinii un reostat reglabil.
A
IA
Ω Motor
B
C
B
Ω
IA
A
Modificarea în trepte ale rezistenţei Modificarea în trepte ale tensiunii
- La modificarea în trepte ale tensiunii sau rezistenţei se producmodificări ale curentului şi cuplului în timp dar cuplul staţionarnu se modifică, deci nici valoarea staţionară a curentului.
R>RpC
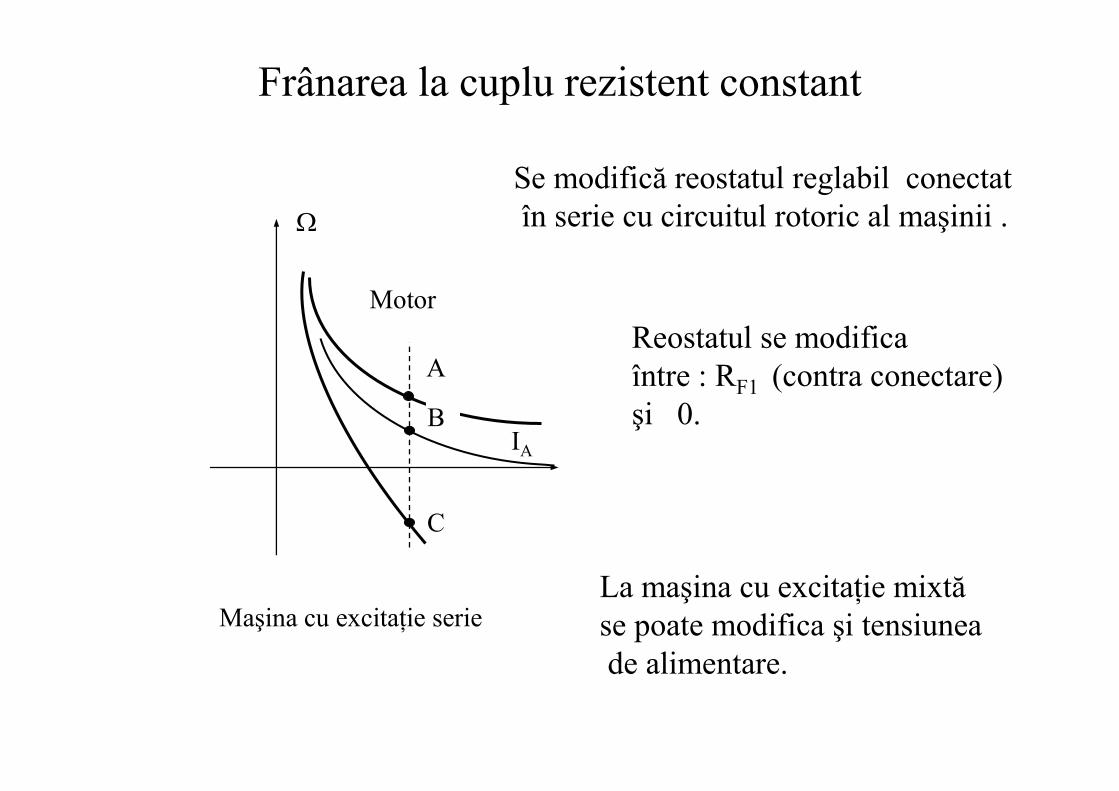
Frânarea la cuplu rezistent constant
Maşina cu excitaţie serie
C
IA
Ω
Motor
A
B
Se modifică reostatul reglabil conectatîn serie cu circuitul rotoric al maşinii .
Reostatul se modificaîntre : RF1 (contra conectare)şi 0.
La maşina cu excitaţie mixtăse poate modifica şi tensiuneade alimentare.
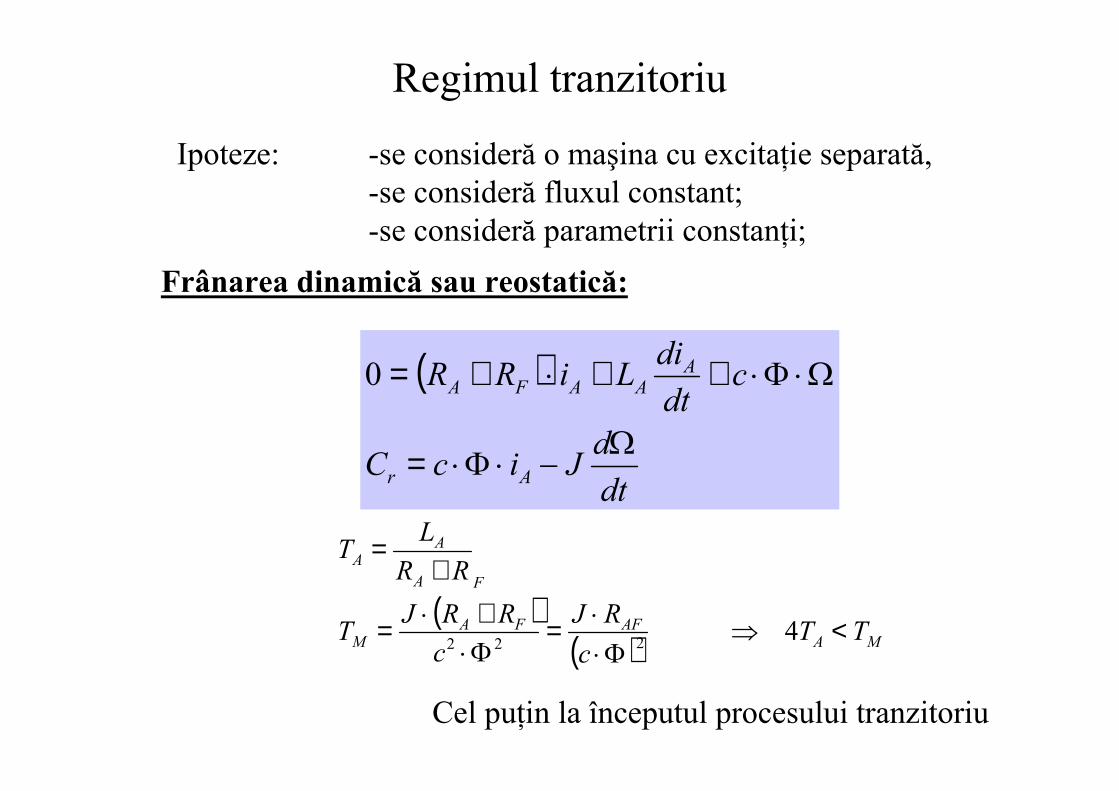
Regimul tranzitoriu
Ipoteze: -se consideră o maşina cu excitaţie separată,-se consideră fluxul constant;-se consideră parametrii constanţi;
Frânarea dinamică sau reostatică:
( )
dtdJicC
cdtdiLiRR
Ar
AAAFA
Ω−⋅Φ⋅=
Ω⋅Φ⋅++⋅+=0
( )( ) MA
AFFAM
FA
AA
TTcRJ
cRRJT
RRLT
<⇒Φ⋅⋅=
Φ⋅+⋅=
+=
4222
Cel puţin la începutul procesului tranzitoriu
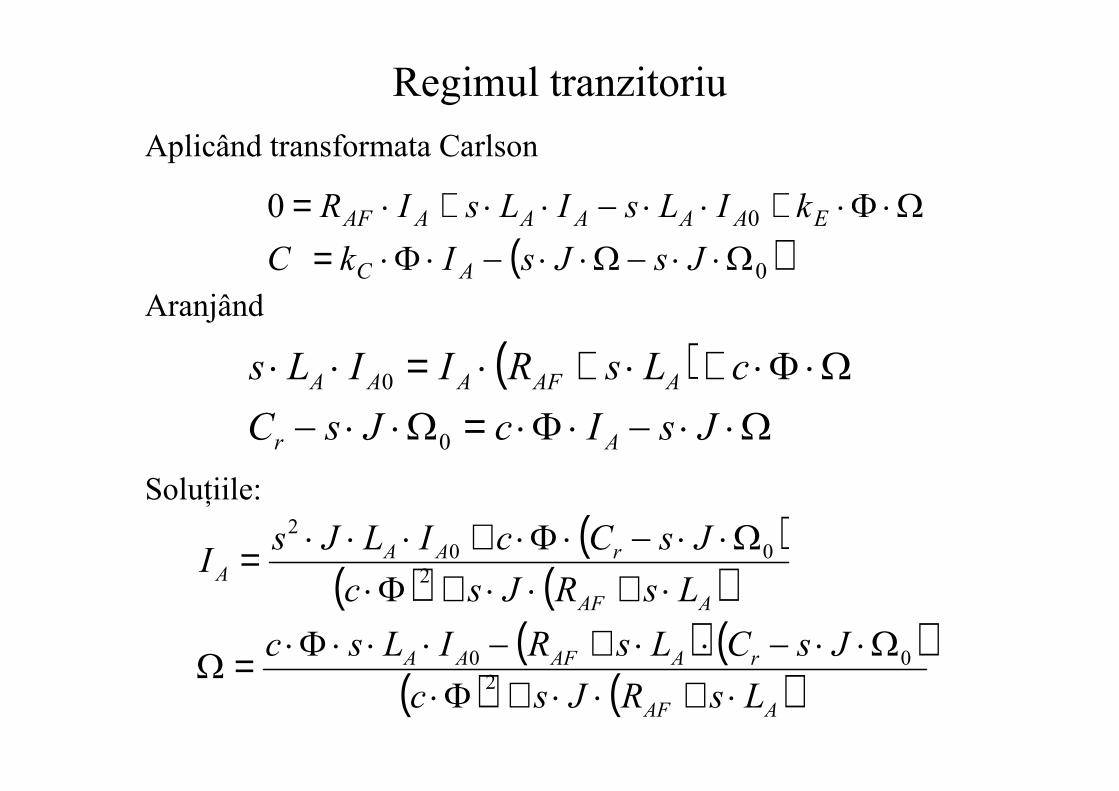
Regimul tranzitoriu
( )0
00Ω⋅⋅−Ω⋅⋅−⋅Φ⋅=
Ω⋅Φ⋅+⋅⋅−⋅⋅+⋅=JsJsIkC
kILsILsIR
AC
EAAAAAAF
Aplicând transformata Carlson
Aranjând
( )Ω⋅⋅−⋅Φ⋅=Ω⋅⋅−
Ω⋅Φ⋅+⋅+⋅=⋅⋅JsIcJsCcLsRIILs
Ar
AAFAAA
0
0
( )( ) ( )
( ) ( )( ) ( )AAF
rAAFAA
AAF
rAAA
LsRJscJsCLsRILsc
LsRJscJsCcILJsI
⋅+⋅⋅+Φ⋅Ω⋅⋅−⋅⋅+−⋅⋅⋅Φ⋅=Ω
⋅+⋅⋅+Φ⋅Ω⋅⋅−⋅Φ⋅+⋅⋅⋅=
200
200
2Soluţiile:
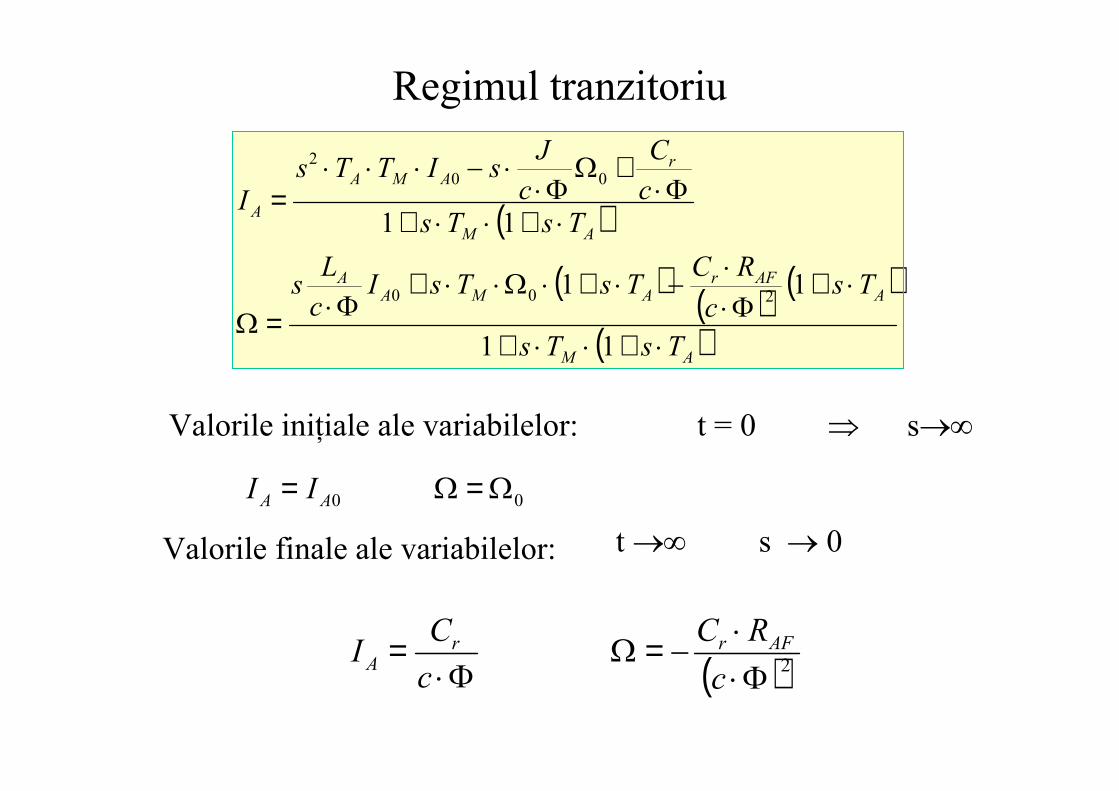
Regimul tranzitoriu
( )
( ) ( ) ( )
( )AM
AAFr
AMAA
AM
rAMA
A
TsTs
TscRCTsTsI
cLs
TsTscC
cJsITTs
I
⋅+⋅⋅+
⋅+Φ⋅⋅
−⋅+⋅Ω⋅⋅+Φ⋅=Ω
⋅+⋅⋅+Φ⋅
+ΩΦ⋅
⋅−⋅⋅⋅=
11
11
11
200
002
Valorile iniţiale ale variabilelor: t = 0 ⇒ s→∞
Valorile finale ale variabilelor:
00 Ω=Ω= AA II
( )2Φ⋅⋅
−=ΩΦ⋅
=cRC
cCI AFrr
A
t →∞ s → 0
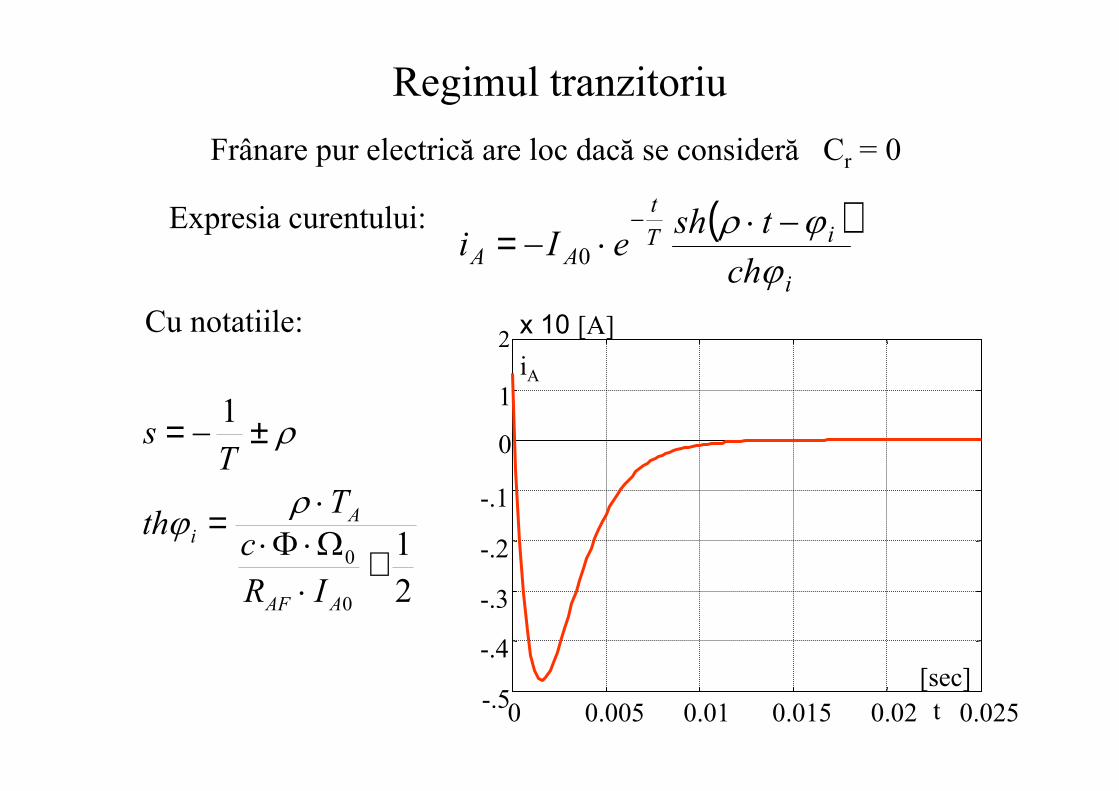
Regimul tranzitoriuFrânare pur electrică are loc dacă se consideră Cr = 0
[A]x 10
0 0.005 0.01 0.015 0.02 0.025-.5
-.4
-.3
-.2
-.1
0
1
2iA
t[sec]
( )i
iTt
AA chtsheIiϕϕρ −⋅
⋅−=−
0Expresia curentului:
21
1
0
0 +⋅Ω⋅Φ⋅⋅=
±−=
AAF
Ai
IRc
Tth
Ts
ρϕ
ρ
Cu notatiile:

Exemplu
La un motor de curent continuu cu excitatie separata s-au masurat la mersul ingol : tensiunea UA = 440 V; curentul IA0 = 5,2 A; turatia n0 = 2485 rot/min.Cunoscind rezistenta circuitului rotoric Ra = 1,48 Ω; caderea de tensiune laperii ∆Up = 2 V; Motorul lucreaza la curentul IA = 33 A.
Sa se calculeze treptele rezistentei de franare in cazul franarii princontraconectare cu 2 trepte de rezistenta, la curent maxim Ipmax = 70 A,
constanta de flux
VsIRUU
C AAp 653,1
302485
2,548,12440
0
0 =⋅
⋅−−=Ω
−∆−=Φ
π
rezistenta totala a circuitului rotoric la franare
Ω=⋅+=ΦΩ+
=+ 845,1170
42,235653,1440
max1
f
AfA I
CURR
srC
IRUU AApA /42,235653,1
3348,12440 =⋅−−=Φ
−∆−=Ω
viteza unghiulara de rotatie
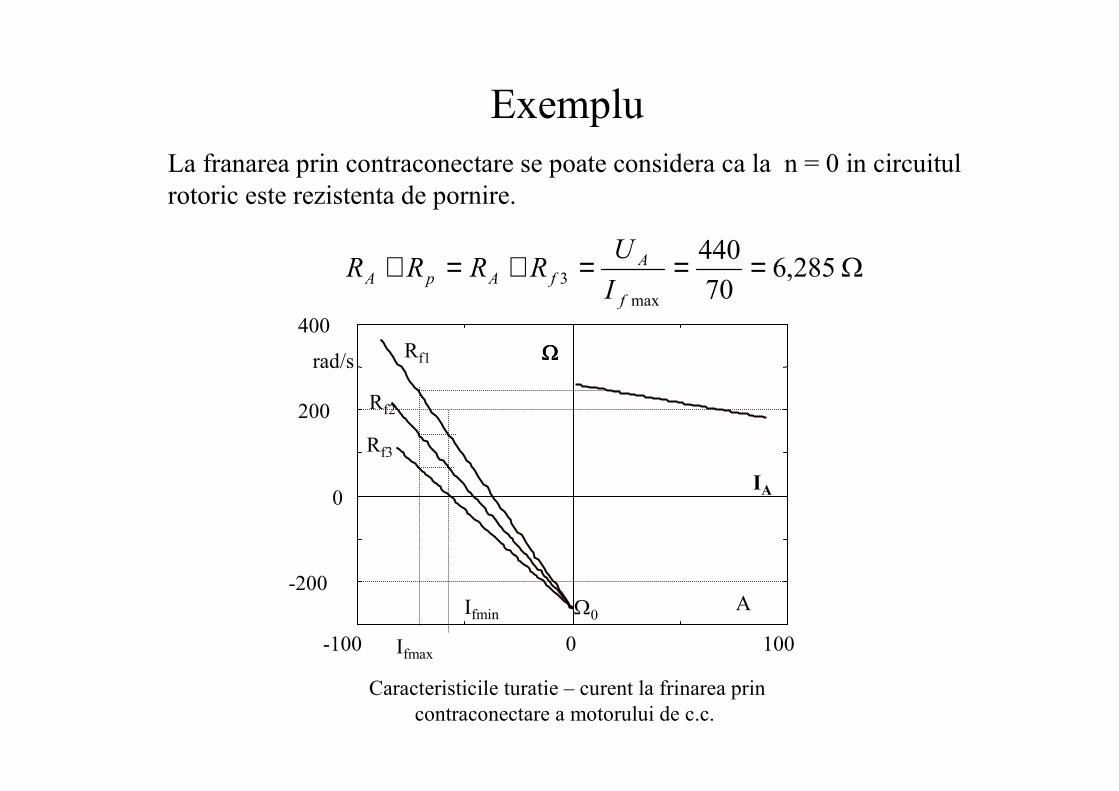
ExempluLa franarea prin contraconectare se poate considera ca la n = 0 in circuitulrotoric este rezistenta de pornire.
Ω===+=+ 285,670440
max3
f
AfApA I
URRRR
Caracteristicile turatie – curent la frinarea princontraconectare a motorului de c.c.
A
rad/s
Ifmin
Ifmax
Rf3
Rf2
Rf1
IA
ΩΩΩΩ
Ω0
-100 0 100
-200
0
200
400
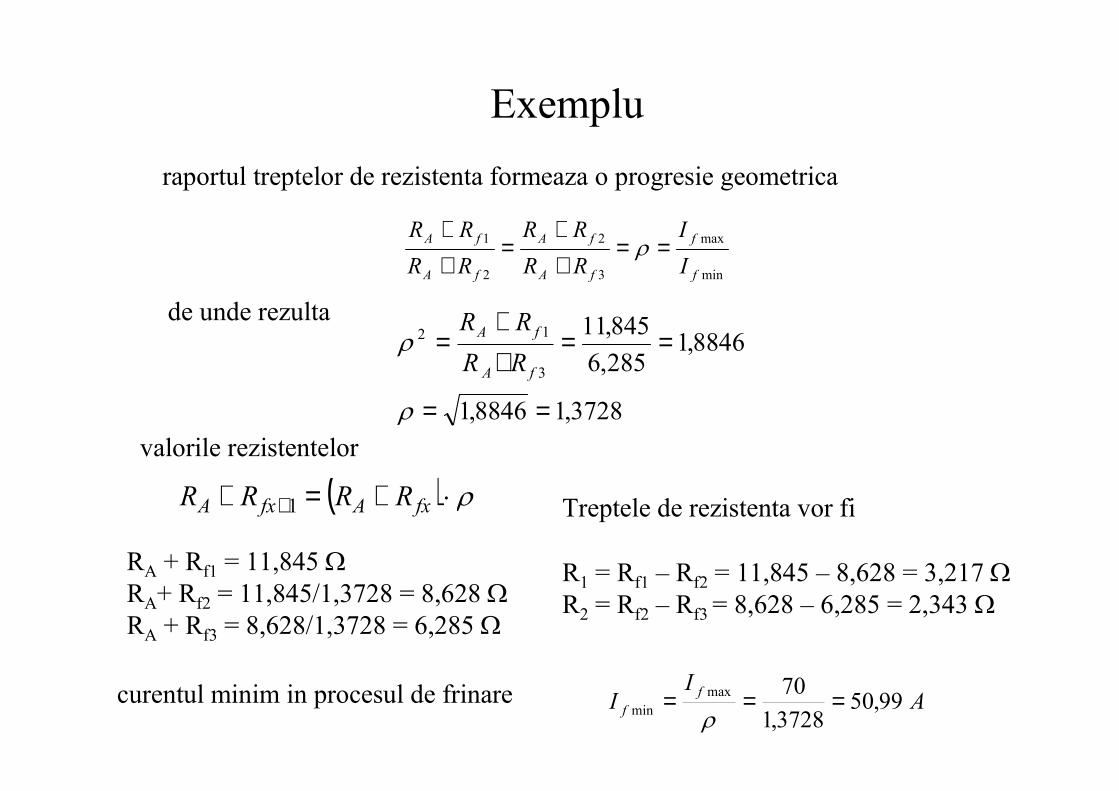
Exempluraportul treptelor de rezistenta formeaza o progresie geometrica
min
max
3
2
2
1
f
f
fA
fA
fA
fA
II
RRRR
RRRR
==++
=++
ρ
de unde rezulta
3728,18846,1
8846,1285,6845,11
3
12
==
==++
=
ρ
ρfA
fA
RRRR
valorile rezistentelor
RA + Rf1 = 11,845 ΩRA+ Rf2 = 11,845/1,3728 = 8,628 ΩRA + Rf3 = 8,628/1,3728 = 6,285 Ω
Treptele de rezistenta vor fi
R1 = Rf1 – Rf2 = 11,845 – 8,628 = 3,217 ΩR2 = Rf2 – Rf3 = 8,628 – 6,285 = 2,343 Ω
curentul minim in procesul de frinare AI
I ff 99,50
3728,170max
min ===ρ
( ) ρ⋅+=+ + fxAfxA RRRR 1
Exemplu
938,1756,3 ==ρ
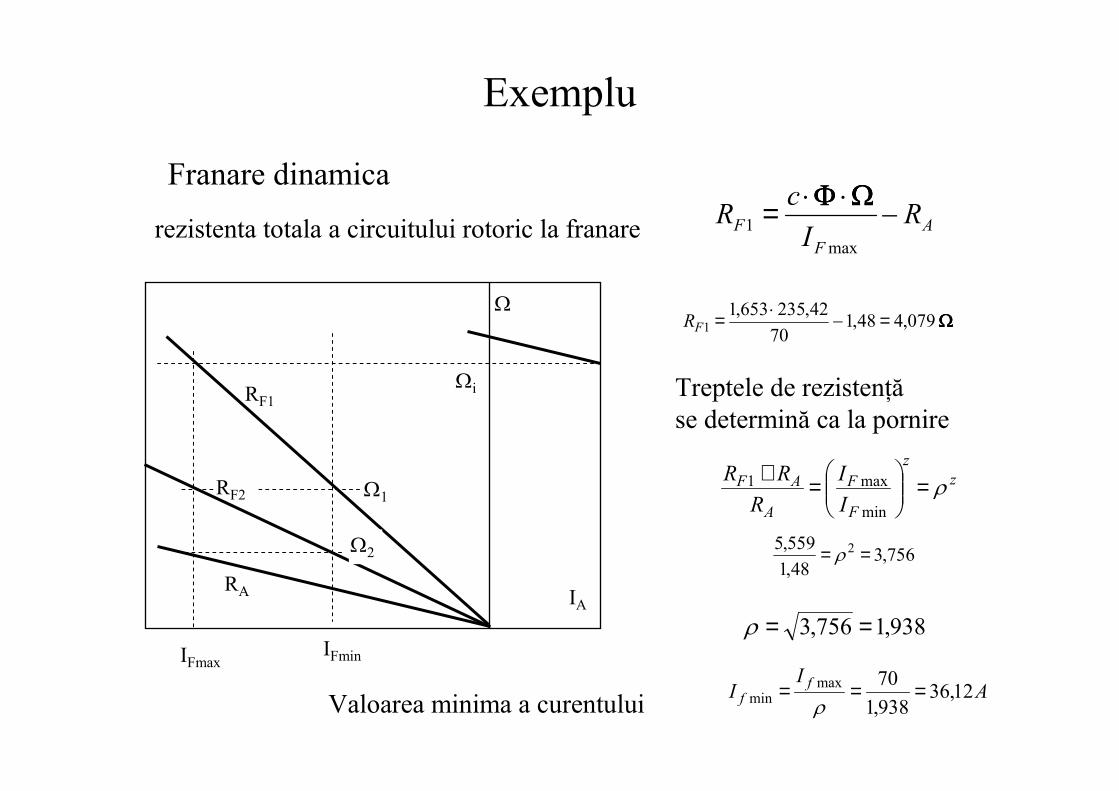
Franare dinamica
IFmax
IA
Ωi
Ω
Ω1RF2z
z
F
F
A
AFII
RRR ρ=
=+
min
max1
RF1
IFmin
Ω2
RA
Treptele de rezistenţăse determină ca la pornire
AF
F RIcR −
⋅⋅=max
1ΩΩΩΩΦΦΦΦ
rezistenta totala a circuitului rotoric la franare
756,348,1559,5 2 == ρ
ΩΩΩΩ079,448,170
42,235653,11 =−
⋅=FR
938,1756,3 ==ρ
AI
I ff 12,36
938,170max
min ===ρValoarea minima a curentului
Exemplu
valorile rezistentelor
RA + Rf1 = 5,559 ΩRA+ Rf2 = 5,559 /1,938 = 2,868 ΩRA + Rf3 = 2,868 / 1,938 = 1,48 Ω
Treptele de rezistenta vor fi
R1 = Rf1 – Rf2 = 5,559 – 2,868 = 2,691 ΩR2 = Rf2 – Rf3 = 2,868 – 1,48 = 1,388 Ω
( ) ρ⋅+=+ + fxAfxA RRRR 1