Echipament de control al rezistenţei de izolaţie tip ECRI-02 · Temperatura de actionare a...
34
ICPE CENTRUL 3 - SERVO CAIET DE SARCINI Sisteme de propulsie cu servomotoare sincrone cu magneti permanenti pentru transport electric de mica capacitate tip SP-EV-X-Y- FILA 1 / 34 APROBAT, DIRECTOR CENTRU 3 SERVO Dr.ing. Mihaela SCORTESCU 1. GENERALITĂŢI 1.1. Obiect şi domeniu de aplicare; Descriere produs Prezentul caiet de sarcini se referă la sistemele de propulsie cu servomotoare sincrone cu magneti permanenti pentru transport electric de mica capacitate tip SP-EV-X-Y. Produsul SP-EV-X-Y este destinat sa echipeze vehicule electrice de mica capacitate (bicicleta electrica, scuter electric, triciclu electric, vehicul electric usor cu 3 sau 4 roti). Componenta unui sistem de propulsie : servomotor sincron cu magneti permanenti , cu traductor de turatie si pozitie bloc de alimentare si comanda, care asigura urmatoarele functiuni: reglarea turatiei motorului functie de comenzile furnizate de catre dispozitivele de comanda speciale montate pe vehicul functionarea corecta a sistemului de propulsie in conditiile alimentarii de la sursa de curent continuu limitarea curentului la valoarea prestabilita franarea electrica 1.2. Simbolizare Simbolizarea produsului este: SP-EV-X-Y,unde - SP- sistem de propulsie - EV- vehicule electrice - X- tensiunea de alimentare (V) - Y- puterea sistemului (kW) 1.3. Notare: Notarea produsului cuprinde denumirea prescurtată si simbolizarea SP-EV-X-Y-MS (pentru motor) SP-EV-X-Y-BAC (pentru blocul de actionare si comanda)
Transcript of Echipament de control al rezistenţei de izolaţie tip ECRI-02 · Temperatura de actionare a...
ICPE CENTRUL 3 - SERVO
CAIET DE SARCINI Sisteme de propulsie cu servomotoare sincrone cu magneti permanenti pentru
transport electric de mica capacitate tip SP-EV-X-Y-
FILA 1 / 34
APROBAT, DIRECTOR CENTRU 3 SERVO Dr.ing. Mihaela SCORTESCU
1. GENERALITĂŢI
1.1. Obiect şi domeniu de aplicare; Descriere produs
Prezentul caiet de sarcini se referă la sistemele de propulsie cu servomotoare sincrone
cu magneti permanenti pentru transport electric de mica capacitate tip SP-EV-X-Y.
Produsul SP-EV-X-Y este destinat sa echipeze vehicule electrice de mica capacitate
(bicicleta electrica, scuter electric, triciclu electric, vehicul electric usor cu 3 sau 4 roti).
Componenta unui sistem de propulsie :
servomotor sincron cu magneti permanenti , cu traductor de turatie si pozitie
bloc de alimentare si comanda, care asigura urmatoarele functiuni:
reglarea turatiei motorului functie de comenzile furnizate de catre dispozitivele de
comanda speciale montate pe vehicul
functionarea corecta a sistemului de propulsie in conditiile alimentarii de la sursa de
curent continuu
limitarea curentului la valoarea prestabilita
franarea electrica
1.2. Simbolizare
Simbolizarea produsului este: SP-EV-X-Y,unde
- SP- sistem de propulsie
- EV- vehicule electrice
- X- tensiunea de alimentare (V)
- Y- puterea sistemului (kW)
1.3. Notare:
Notarea produsului cuprinde denumirea prescurtată si simbolizarea
SP-EV-X-Y-MS (pentru motor)
SP-EV-X-Y-BAC (pentru blocul de actionare si comanda)

ICPE CENTRUL 3 - SERVO
CAIET DE SARCINI Sisteme de propulsie cu servomotoare sincrone cu magneti permanenti pentru
transport electric de mica capacitate tip SP-EV-X-Y-
FILA 2 / 34
1.4. Durata de utilizare
Durata medie de utilizare este de 5 ani.
1.5. Cerinţe de mediu înconjurător
Produsele care fac obiectul prezentei specificaţii tehnice funcţionează , pot fi transportate
si depozitate în următoarele condiţii de mediu:
- pentru depozitare: IE 12, conf. SR EN 60721-3-1 + A2:97;
- pentru transport: IE 22, conf SR EN 60721-3-2 + A2:97;
- pentru utilizare: 3K3, 3B1, 3C2, 3S2, 3M1, conf SR EN 60721-3-3 + A1:95+A2:96
Obs. Menţiunile la condiţiile de transport şi depozitare se referă la produse ambalate.
Produsul nu conduce la impact negativ de mediu conf. POM-BCSMM-30.3-01 (Procedura
operaţională)
1.6. Cerinţe constructive, funcţionale şi se altă natură
- produsul nu pune în pericol viaţa şi sănătatea utilizatorului
- gradul de protecţie constructivă :
IP 44 pentru motor
IP 23 pentru blocul de actionare si comanda,
conf. SR CEI 60529 cap 4.5.
1.7. Prezentul caiet de sarcini este valabil pentru toate dimensiunile seriei.
1.8. Cele 7 tipodimensiuni ale seriei SP-EV-X-Y se vor fabrica la ICPE-SA, Centrul 3
SERVOMOTOARE. Pregatirea de fabricatie este validata.
1.9. In cazul unor cereri de la beneficiari directi, se pot fabrica si alte tipodimensiuni.
Pentru fiecare noua tipodimensiune, se completeaza anexele aferente. Simbolizarea
anexelelor se va face astfel:
SP-Ev-X-Y Anexa ........ (nr.anexei)
ICPE CENTRUL 3 - SERVO
CAIET DE SARCINI Sisteme de propulsie cu servomotoare sincrone cu magneti permanenti pentru
transport electric de mica capacitate tip SP-EV-X-Y-
FILA 3 / 34
2. CONDIŢII TEHNICE DE CALITATE
2.1 Condiţii constructive si de executie :
2.1.1 Dimensiunile de gabarit ale componentelor sunt indicate in anexele 1 si 2 :
2.1.2 Gradul normal de protecţie este IP44 pentru motor si IP 23 pentru blocul de
actionare si comanda, conf. SR EN 60529/1995.
2.2 Condiţii privind aptitudinile de funcţionare
Caracteristicile tehnice principale ale produsului sunt indicate in anexa 3
2.3 Condiţii privind securitatea în utilizare
2.3.1 Rezistenţa de izolaţie între infasurarile motorului si carcasa trebuie să fie de min.
15 Mohmi în stare uscată şi min. 2 Mohmi în stare umedă .
2.3.2 Produsul trebuie să suporte o tensiune de ţinere ( rigiditate dielectrică ) de 500V,
50Hz între bornele de alimentare ale actionarii si carcasa
2.4 Condiţii privind comportarea la acţiunea factorilor de mediu
2.4.1 Produsul rezistă la următorul ciclu climatic :
- 2h la -200C ± 20C ;
- 2h la θa = 20°C ± 5°C;
- 2h la 500C ± 20C ;
- 48h la 400C ± 20C umiditate relativă 70% ± 3% ;
Imediat după terminarea încercării de căldură umedă se verifică conditia tehnica 2.3.1.
2.4.2 Produsul rezistă la încercarea de vibraţii în condiţiile :
- f = 10 – 55 Hz ; - a = 10m/s2 ;
- durata = 1h ;
După încercare produsul îndeplineşte una din conditiile tehnice 2.2.5.
ICPE CENTRUL 3 - SERVO
CAIET DE SARCINI Sisteme de propulsie cu servomotoare sincrone cu magneti permanenti pentru
transport electric de mica capacitate tip SP-EV-X-Y-
FILA 4 / 34
2.5 Condiţii privind funcţionarea de durată
Produsul rezistă la o încercare de durată de funcţionare de 100 h în laborator.
Conditiile in care produsul trebuie sa functioneze sunt urmatoarele :
- Alimentat de la o sursa de X V c.c.
- Temperatura ambianta : 15...30 ˚C
- cel putin 20 manevre pornit/oprit
2.6 Condiţii privind fiabilitatea
Produsul îndeplineşte următorii indicatori de fiabilitate, pentru un nivel de încredere de
0,9 – MTBF 5000h.
Coeficientul de disponibilitate anual prelimitat este mai bun ca 0,9.
3. REGULI PENTRU VERIFICAREA CALITĂŢII
Produsul care face obiectul prezentului caiet de sarcini se supune următoarelor încercări şi verificări:
- de tip
- de lot
- de recepţie
3.1. Încercările de tip se execută pe 1 produse la introducerea în fabricaţie, se repetă
pe 2 produse la fiecare 3 ani pe tot parcursul fabricaţiei precum şi de fiecare dată când se fac
înlocuiri de materiale şi modificări de tehnologie care pot afecta parametrii tehnici ai produsului.
Rezultatele încercărilor de tip se consideră satisfăcătoare dacă produsele corespund tuturor
condiţiilor tehnice aferente încercărilor de tip şi specificate în tabelul 2.
3.2. Încercările de lot se execută pe fiecare produs. Rezultatele încercărilor de lot se
consideră satisfăcătoare dacă produsul corespunde tuturor condiţiilor tehnice aferente
încercărilor de lot şi specificate în tabelul 1.
3.3. Încercările de recepţie se efectuează statistic, conf. STAS 3160/2-84, plan dublu
de control normal, nivel de verificare Nv II, nivel de calitate acceptabil AQL 1,5 şi sunt
specificate în tabelul 1.
Tabelul 1
ICPE CENTRUL 3 - SERVO
CAIET DE SARCINI Sisteme de propulsie cu servomotoare sincrone cu magneti permanenti pentru
transport electric de mica capacitate tip SP-EV-X-Y-
FILA 5 / 34
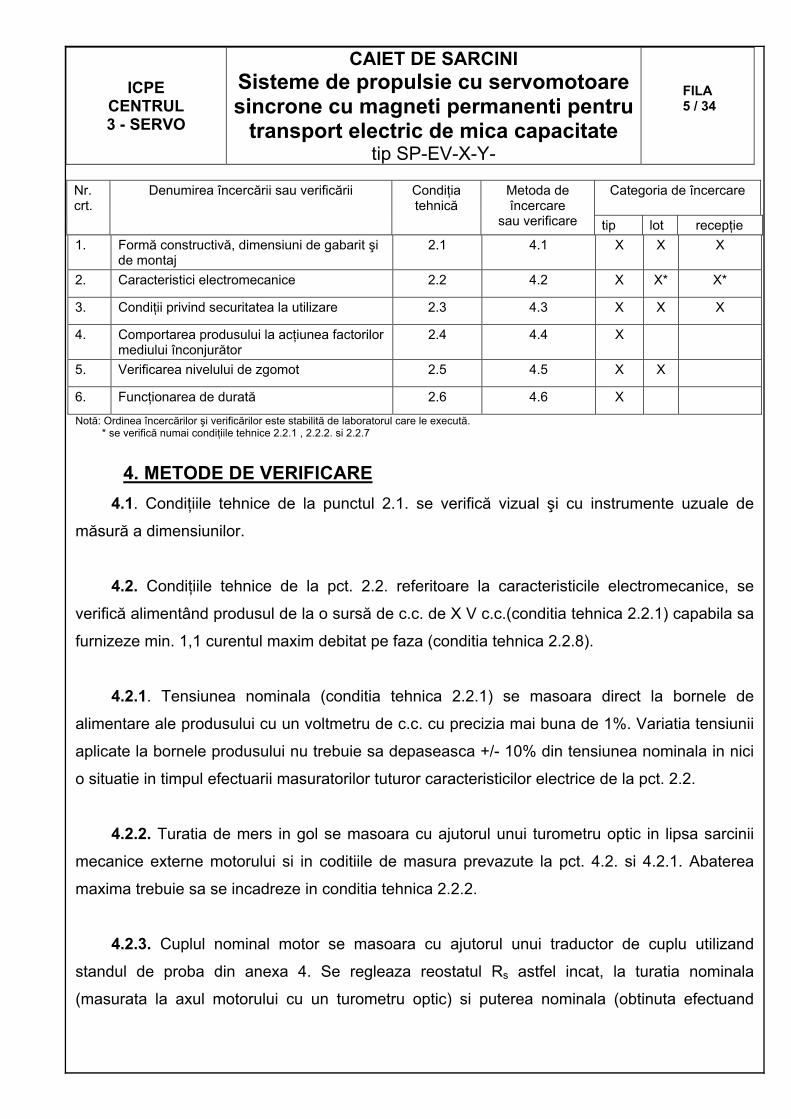
Categoria de încercare
Nr. crt.
Denumirea încercării sau verificării Condiţia tehnică
Metoda de încercare
sau verificare tip lot recepţie
1. Formă constructivă, dimensiuni de gabarit şi de montaj
2.1 4.1 X X X
2. Caracteristici electromecanice 2.2 4.2 X X* X*
3. Condiţii privind securitatea la utilizare 2.3 4.3 X X X
4. Comportarea produsului la acţiunea factorilor mediului înconjurător
2.4 4.4 X
5. Verificarea nivelului de zgomot 2.5 4.5 X X
6. Funcţionarea de durată 2.6 4.6 X
Notă: Ordinea încercărilor şi verificărilor este stabilită de laboratorul care le execută. * se verifică numai condiţiile tehnice 2.2.1 , 2.2.2. si 2.2.7
4. METODE DE VERIFICARE
4.1. Condiţiile tehnice de la punctul 2.1. se verifică vizual şi cu instrumente uzuale de
măsură a dimensiunilor.
4.2. Condiţiile tehnice de la pct. 2.2. referitoare la caracteristicile electromecanice, se
verifică alimentând produsul de la o sursă de c.c. de X V c.c.(conditia tehnica 2.2.1) capabila sa
furnizeze min. 1,1 curentul maxim debitat pe faza (conditia tehnica 2.2.8).
4.2.1. Tensiunea nominala (conditia tehnica 2.2.1) se masoara direct la bornele de
alimentare ale produsului cu un voltmetru de c.c. cu precizia mai buna de 1%. Variatia tensiunii
aplicate la bornele produsului nu trebuie sa depaseasca +/- 10% din tensiunea nominala in nici
o situatie in timpul efectuarii masuratorilor tuturor caracteristicilor electrice de la pct. 2.2.
4.2.2. Turatia de mers in gol se masoara cu ajutorul unui turometru optic in lipsa sarcinii
mecanice externe motorului si in coditiile de masura prevazute la pct. 4.2. si 4.2.1. Abaterea
maxima trebuie sa se incadreze in conditia tehnica 2.2.2.
4.2.3. Cuplul nominal motor se masoara cu ajutorul unui traductor de cuplu utilizand
standul de proba din anexa 4. Se regleaza reostatul Rs astfel incat, la turatia nominala
(masurata la axul motorului cu un turometru optic) si puterea nominala (obtinuta efectuand
ICPE CENTRUL 3 - SERVO
CAIET DE SARCINI Sisteme de propulsie cu servomotoare sincrone cu magneti permanenti pentru
transport electric de mica capacitate tip SP-EV-X-Y-
FILA 6 / 34
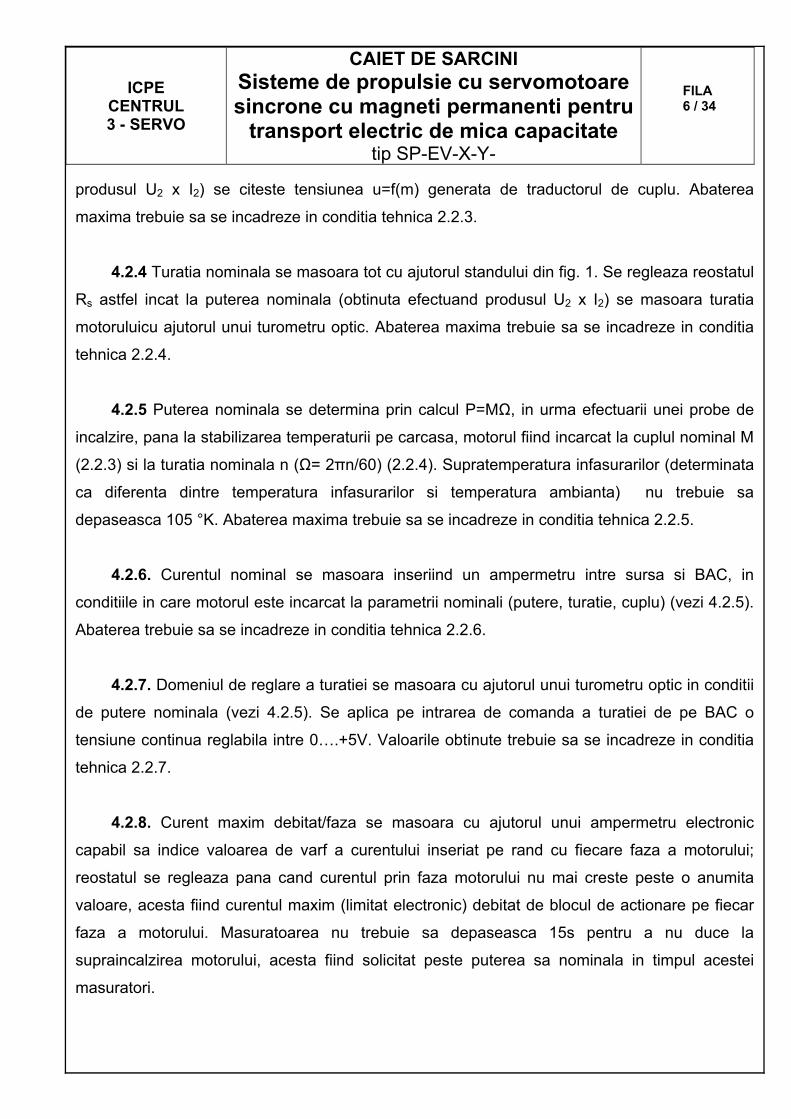
produsul U2 x I2) se citeste tensiunea u=f(m) generata de traductorul de cuplu. Abaterea
maxima trebuie sa se incadreze in conditia tehnica 2.2.3.
4.2.4 Turatia nominala se masoara tot cu ajutorul standului din fig. 1. Se regleaza reostatul
Rs astfel incat la puterea nominala (obtinuta efectuand produsul U2 x I2) se masoara turatia
motoruluicu ajutorul unui turometru optic. Abaterea maxima trebuie sa se incadreze in conditia
tehnica 2.2.4.
4.2.5 Puterea nominala se determina prin calcul P=MΩ, in urma efectuarii unei probe de
incalzire, pana la stabilizarea temperaturii pe carcasa, motorul fiind incarcat la cuplul nominal M
(2.2.3) si la turatia nominala n (Ω= 2πn/60) (2.2.4). Supratemperatura infasurarilor (determinata
ca diferenta dintre temperatura infasurarilor si temperatura ambianta) nu trebuie sa
depaseasca 105 °K. Abaterea maxima trebuie sa se incadreze in conditia tehnica 2.2.5.
4.2.6. Curentul nominal se masoara inseriind un ampermetru intre sursa si BAC, in
conditiile in care motorul este incarcat la parametrii nominali (putere, turatie, cuplu) (vezi 4.2.5).
Abaterea trebuie sa se incadreze in conditia tehnica 2.2.6.
4.2.7. Domeniul de reglare a turatiei se masoara cu ajutorul unui turometru optic in conditii
de putere nominala (vezi 4.2.5). Se aplica pe intrarea de comanda a turatiei de pe BAC o
tensiune continua reglabila intre 0….+5V. Valoarile obtinute trebuie sa se incadreze in conditia
tehnica 2.2.7.
4.2.8. Curent maxim debitat/faza se masoara cu ajutorul unui ampermetru electronic
capabil sa indice valoarea de varf a curentului inseriat pe rand cu fiecare faza a motorului;
reostatul se regleaza pana cand curentul prin faza motorului nu mai creste peste o anumita
valoare, acesta fiind curentul maxim (limitat electronic) debitat de blocul de actionare pe fiecar
faza a motorului. Masuratoarea nu trebuie sa depaseasca 15s pentru a nu duce la
supraincalzirea motorului, acesta fiind solicitat peste puterea sa nominala in timpul acestei
masuratori.
ICPE CENTRUL 3 - SERVO
CAIET DE SARCINI Sisteme de propulsie cu servomotoare sincrone cu magneti permanenti pentru
transport electric de mica capacitate tip SP-EV-X-Y-
FILA 7 / 34
4.2.9. Curentul absorbit fara sarcina este un parametru al blocului de actionare si comanda
(BAC) si se masoara deconectand cele 3 faze ale motorului de la BAC si inseriind un
ampermetru de c.c. cu una din bornele de alimentare a BAC. Valoarea obtinuta trebuie sa se
incadreze in conditia tehnica 2.2.9.
4.2.10. Temperatura de actionare a protectiei termice este temperatura radiatorului BAC la
care comanda motorului este blocata. Se masoara cu ajutorul unui termometru electronic a
carui sonda (termocuplu, etc) se monteaza in contact termic strans cu radiatorul BAC; acestuia
din urma i se creste temperatura cu ajutorul unei surse de caldura externe (rezistenta electrica
amplasata sub acesta) pana cand protectia termica a BAC se anclanseaza. Valoarea obtinuta
trebuie sa se incadreze in conditia tehnica 2.2.10.
4.2.11. Temperatura de deblocare a protectiei termice este temperatura radiatorului BAC
la care protectia termica se reseteaza, permitand reluarea comenzii motorului cu ajutorul BAC.
Se masoara cu ajutorul unui termometru electronic a carui sonda (termocuplu, etc) se monteaza
in contact termic strans cu radiatorul BAC, lasand acesta sa se raceasca dupa incercarea de la
pct. 4.2.10 si urmarind cu un voltmetru de c.c. sau o sonda logica momentul aparitiei semnalului
de reset al protectiei (sau momentul in care comanda motorului devine din nou posibila).
Valoarea obtinuta trebuie sa se incadreze in conditia tehnica 2.2.11.
4.2.12. Franarea electrica se verifica fara sarcina mecanica, intrerupand brusc semnalul de
comanda al motorului; turatia motorului trebuie sa se anuleze in intervalul de timp prevazut in
conditia tehnica 2.2.12.
4.2.13. Intarziere la anularea curentului maxim debitat pe faza – la atingerea curentului
maxim pe faza, BAC actioneaza in sensul limitarii acestuia prin reducerea factorului de umplere
al circuitului PWM; daca prin aceasta reducere motorul atinge turatia minima si totusi curentul
se mentine la valoarea din conditia tehnica 2.2.8, pentru a evita demagnetizarea motorului, intra
in functiune un circuit de protectie cu temporizare , care anuleaza curentul in toate fazele
motorului. Acest parametru se masoara blocand mecanic axul motorului si masurand cu un
ICPE CENTRUL 3 - SERVO
CAIET DE SARCINI Sisteme de propulsie cu servomotoare sincrone cu magneti permanenti pentru
transport electric de mica capacitate tip SP-EV-X-Y-
FILA 8 / 34
cronometru intervalul de timp dintre momentul blocarii si momentul anularii curentului prin fazele
motorului. Valoarea obtinuta trebuie sa se incadreze in conditia tehnica 2.2.13.
4.3. Verificarea caracteristicilor privind securitatea la utilizare
4.3.1 Verificarea rezistenţei de izolaţie se face cu ajutorul unui megohmetru de 500 V c.c.
între oricare dintre bornele de intrare ale produsului şi oricare dintre bornele de alimentare
pentru starea rece uscată, înainte de punerea în funcţiune.
4.4. Condiţia tehnică 2.4 privind comportarea produsului la acţiunea factorilor de mediu
înconjurător se verifică astfel:
Produsul, în stare de nefuncţionare, se plasează timp de 48 de ore într-o incintă care
asigură condiţiile de la pct. 2.4. Imediat dupa scoaterea din incintă la temperatura mediului
ambiant, produsul trebuie să satisfacă condiţiile tehnice de la pct. 2.3.
4.5. Verificarea nivelului de zgomot, condiţia tehnică de la pct. 2.5 se execută conform
SREN 60034-9:2000
Incercarea de lot se face in comparatie cu zgomotul produs de un motor considerat
etalon.
4.6. Verificarea condiţiei tehnice de la pct. 2.6 se face pe stand care asigură condiţiile
impuse.
După efectuarea celor 100 ore, caracteristicile de la pct. 2.2.1 si 2.2.2 nu trebuie să
difere cu mai mult de 10% faţă de valorile iniţiale.
ICPE CENTRUL 3 - SERVO
CAIET DE SARCINI Sisteme de propulsie cu servomotoare sincrone cu magneti permanenti pentru
transport electric de mica capacitate tip SP-EV-X-Y-
FILA 9 / 34
5. MARCARE, AMBALARE, DEPOZITARE, TRANSPORT, DOCUMENTE DE
LIVRARE
5.1. Marcare
Produsul se marchează cu:
sigla firmei producătoare;
tipul produsului;
tensiunea nominală;
puterea nominala;
clasa de izolaţie a motorului
data fabricaţiei
5.2. Ambalare
Produsele se ambalează colectiv în cutii de carton ondulat STAS 4258-87.
5.3. Depozitare
Depozitarea produselor se face în încăperi închise, ferite de umezeală, fără variaţii bruşte de
temperatură, fără agenţi chimici corozivi.
Cutiile cu produse se aşează conform STAS 6876/1-92 în max. 3 straturi, pe o paletă de lemn
conform STAS 6028/3-87.
5.4. Transport
Transportul produselor se execută cu mijloace de transport acoperite, respectând
condiţiile impuse la pct. 1.5.
Cutiile cu produse se aşează conform STAS 6876/1-92 în max. 3 straturi, pe o paletă de lemn
conform STAS 6028/3-87
5.5. Documente de livrare
Fiecare lot se livrează cu certificat de garanţie şi declaraţie de conformitate 1 buc/cutie.
6. GARANŢII
6.1. Termenul de garanţie pentru produse şi piese de schimb, este conform contractului
încheiat cu beneficiarul, respectând conditiile impuse de HG 394/95.
6.2. Termenul de garanţie este asigurat cu condiţia respectării prezentei Specificaţii
Tehnice.
ICPE CENTRUL 3 - SERVO
CAIET DE SARCINI Sisteme de propulsie cu servomotoare sincrone cu magneti permanenti pentru
transport electric de mica capacitate tip SP-EV-X-Y-
FILA 10 / 34
6.3. Furnizorul asigură piesele de schimb şi schimbarea produselor în termenul de
garanţie şi postgaranţie, conform contractului încheiat cu beneficiarul.
ELABORATOR, ICPE SA Bucureşti-n Centrul 3 - SERVOMOTOARE DIRECTOR CENTRU 3 – Dr. ing. Mihaela SCORTESCU
CO-DIRECTOR PROIECT – Ing. Mihaela CHEFNEUX
ICPE CENTRUL 3 - SERVO
CAIET DE SARCINI Sisteme de propulsie cu servomotoare sincrone cu magneti permanenti pentru
transport electric de mica capacitate tip SP-EV-X-Y-
FILA 11 / 34
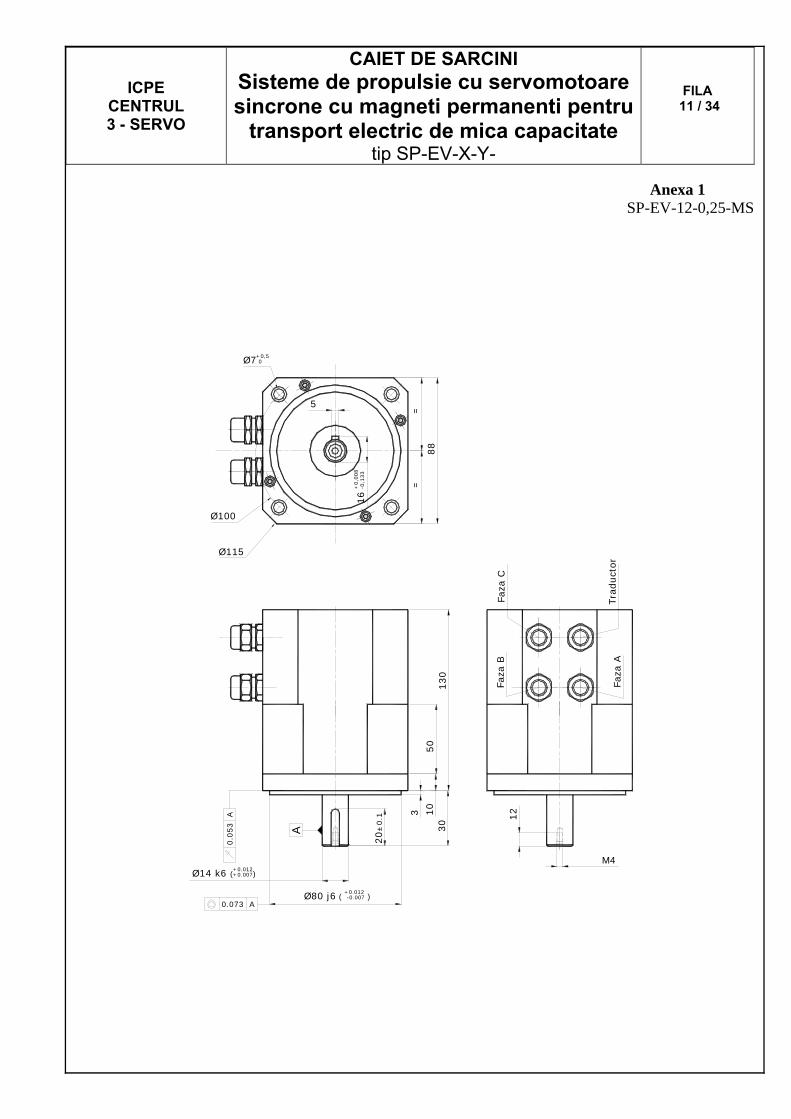
Anexa 1 SP-EV-12-0,25-MS
3 10
50
Ø80 j6 ( +0.012 -0.007 )
0.073 A
0.0
53
A
A
20
±0.1
Ø14 k6 (+0.012+0.007)
30
130
==
88
Ø115
5
16
+0,0
08
-0,1
33
Ø7+0,5 0
Ø100
Faza
A
Faza
BFa
za C
Tra
duct
or
12
M4
ICPE CENTRUL 3 - SERVO
CAIET DE SARCINI Sisteme de propulsie cu servomotoare sincrone cu magneti permanenti pentru
transport electric de mica capacitate tip SP-EV-X-Y-
FILA 12 / 34
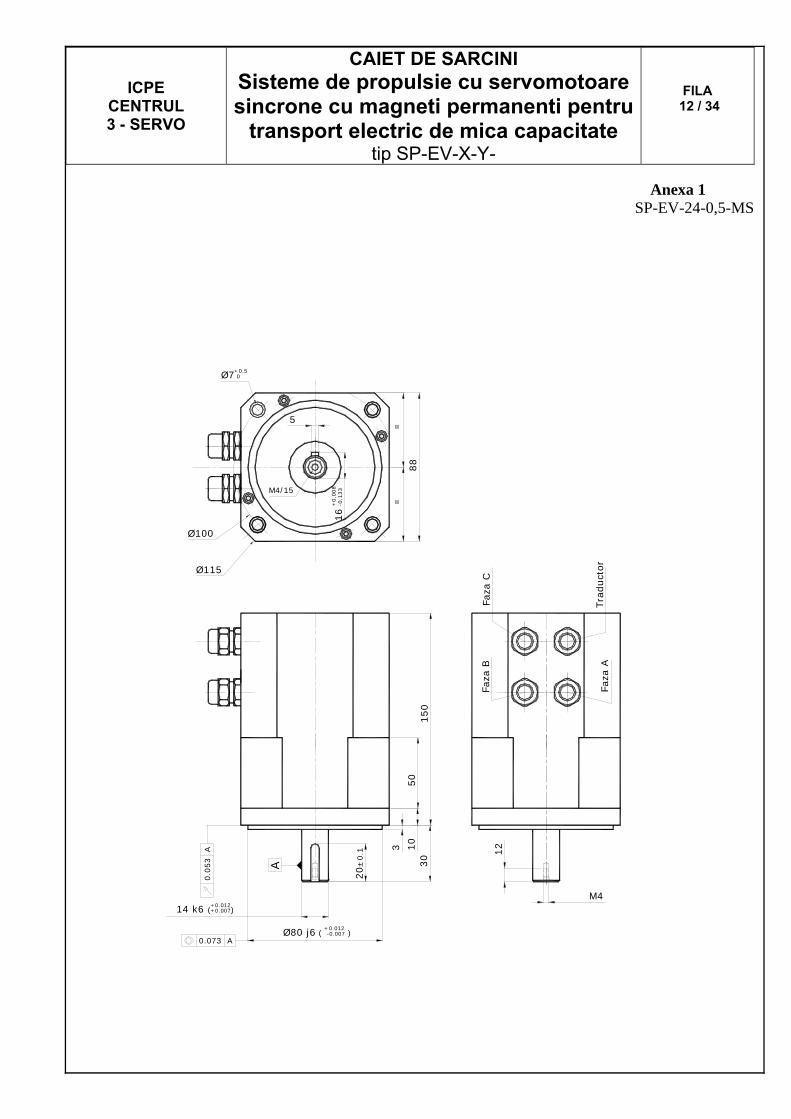
Anexa 1 SP-EV-24-0,5-MS
3 10
50
Ø80 j6 ( +0.012 -0.007 )
0.073 A
0.0
53
A
A
20
±0.1
14 k6 (+0.012+0.007)
30
150
==
88
Ø115
5
16
+0,0
08
-0,1
33
Ø7+0,5 0
Ø100
Faza
A
Faza
BFa
za C
Tra
duct
or
M4/1512
M4
ICPE CENTRUL 3 - SERVO
CAIET DE SARCINI Sisteme de propulsie cu servomotoare sincrone cu magneti permanenti pentru
transport electric de mica capacitate tip SP-EV-X-Y-
FILA 13 / 34
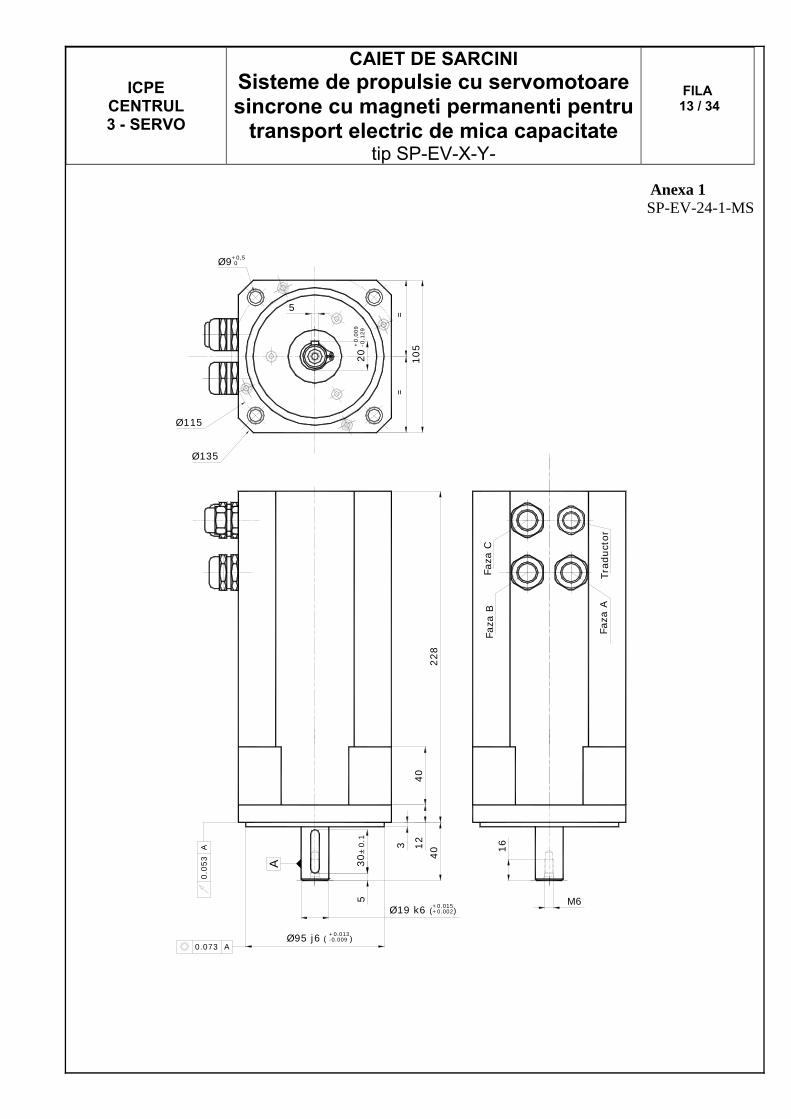
Anexa 1 SP-EV-24-1-MS
3 12
40
Ø95 j6 ( +0.013 -0.009 )
0.073 A
0.0
53
A
A 30
±0.1
Ø19 k6 (+0.015+0.002)
5
40
228
==
105
Ø135
5
20
+0,0
09
-0,1
29
Ø9+0,5 0
Ø115
Faza
A
Faza
BFa
za C
Tra
duct
or
16
M6

ICPE CENTRUL 3 - SERVO
CAIET DE SARCINI Sisteme de propulsie cu servomotoare sincrone cu magneti permanenti pentru
transport electric de mica capacitate tip SP-EV-X-Y-
FILA 14 / 34
Anexa 1 SP-EV-36-1,5-MS
3
12
40
Ø95 j6 ( +0.013 -0.009 )
0.073 A
0.0
53
A
A 30
±0.1
Ø19 k6 (+0.015+0.002)
5
40
248
==
105
Ø135
5
20
+0,0
09
-0,1
29
Ø9+0,5 0
Ø115
Faza
A
Faza
BFa
za C
Tra
duct
or
16
M6
ICPE CENTRUL 3 - SERVO
CAIET DE SARCINI Sisteme de propulsie cu servomotoare sincrone cu magneti permanenti pentru
transport electric de mica capacitate tip SP-EV-X-Y-
FILA 15 / 34
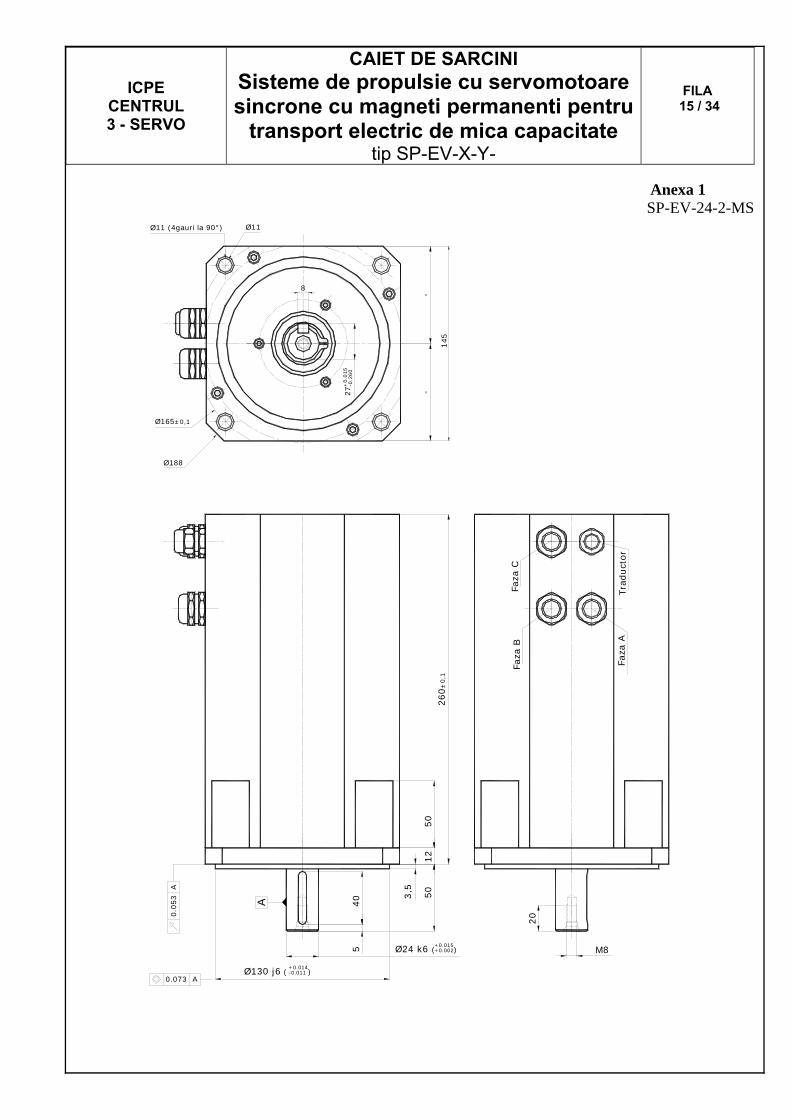
Anexa 1 SP-EV-24-2-MS
==
27+
0.0
15
-0.2
60
8
145
Ø188
Ø165±0,1
Ø11 (4gauri la 90°)
3,5
12
50
Ø130 j6 ( +0.014 -0.011 )
0.073 A
0.0
53
A
A 40
Ø24 k6 (+0.015+0.002)5
50
260
±0,1
Faza
A
Faza
BFa
za C
Tra
duct
or
Ø11
M8
20
ICPE CENTRUL 3 - SERVO
CAIET DE SARCINI Sisteme de propulsie cu servomotoare sincrone cu magneti permanenti pentru
transport electric de mica capacitate tip SP-EV-X-Y-
FILA 16 / 34
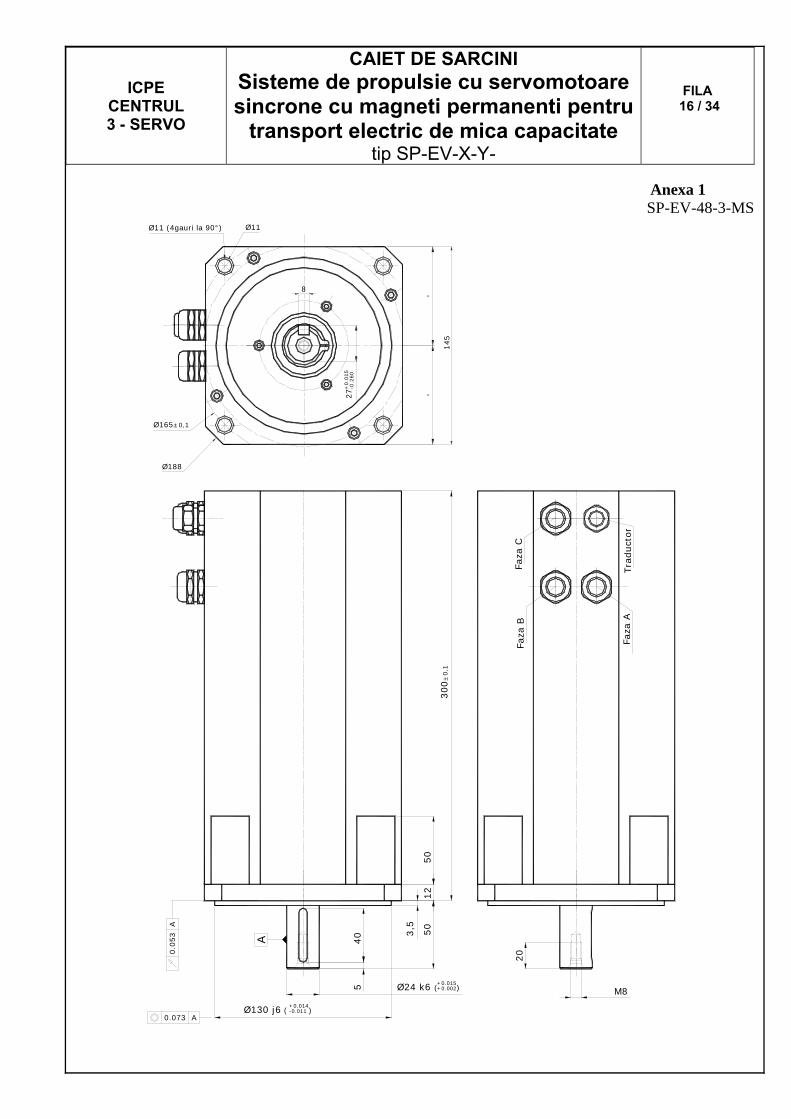
Anexa 1 SP-EV-48-3-MS
==
27+
0.0
15
-0.2
60
8
145
Ø188
Ø165±0,1
Ø11 (4gauri la 90°)
3,5
12
50
Ø130 j6 ( +0.014 -0.011 )
0.073 A
0.0
53
A
A 40
Ø24 k6 (+0.015+0.002)5
50
300
±0,1
Faza
A
Faza
BFa
za C
Tra
duct
or
Ø11
20
M8
ICPE CENTRUL 3 - SERVO
CAIET DE SARCINI Sisteme de propulsie cu servomotoare sincrone cu magneti permanenti pentru
transport electric de mica capacitate tip SP-EV-X-Y-
FILA 17 / 34
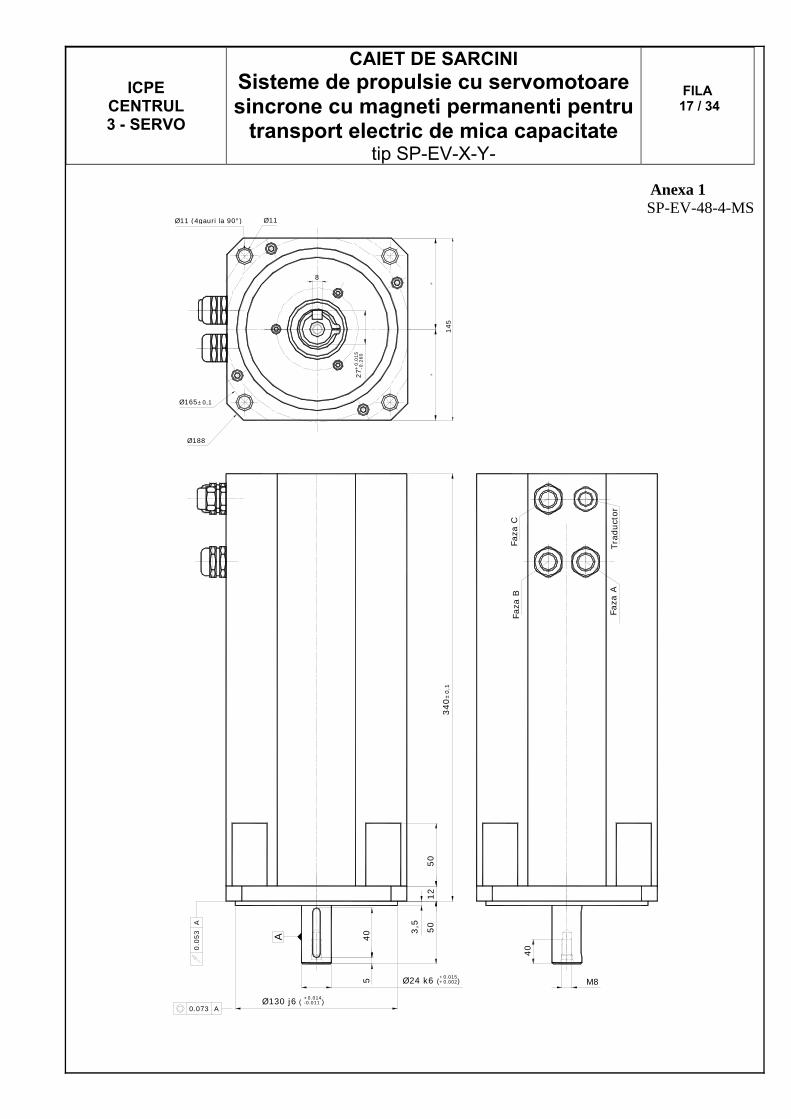
Anexa 1 SP-EV-48-4-MS
==
27+
0.0
15
-0.2
60
8
145
Ø188
Ø165±0,1
Ø11 (4gauri la 90°)
3,5
12
50
Ø130 j6 ( +0.014 -0.011 )
0.073 A
0.0
53
A
A 40
Ø24 k6 (+0.015+0.002)5
50
340
±0,1
Faza
A
Faza
BFa
za C
Tra
duct
or
Ø11
40
M8
ICPE CENTRUL 3 - SERVO
CAIET DE SARCINI Sisteme de propulsie cu servomotoare sincrone cu magneti permanenti pentru
transport electric de mica capacitate tip SP-EV-X-Y-
FILA 18 / 34
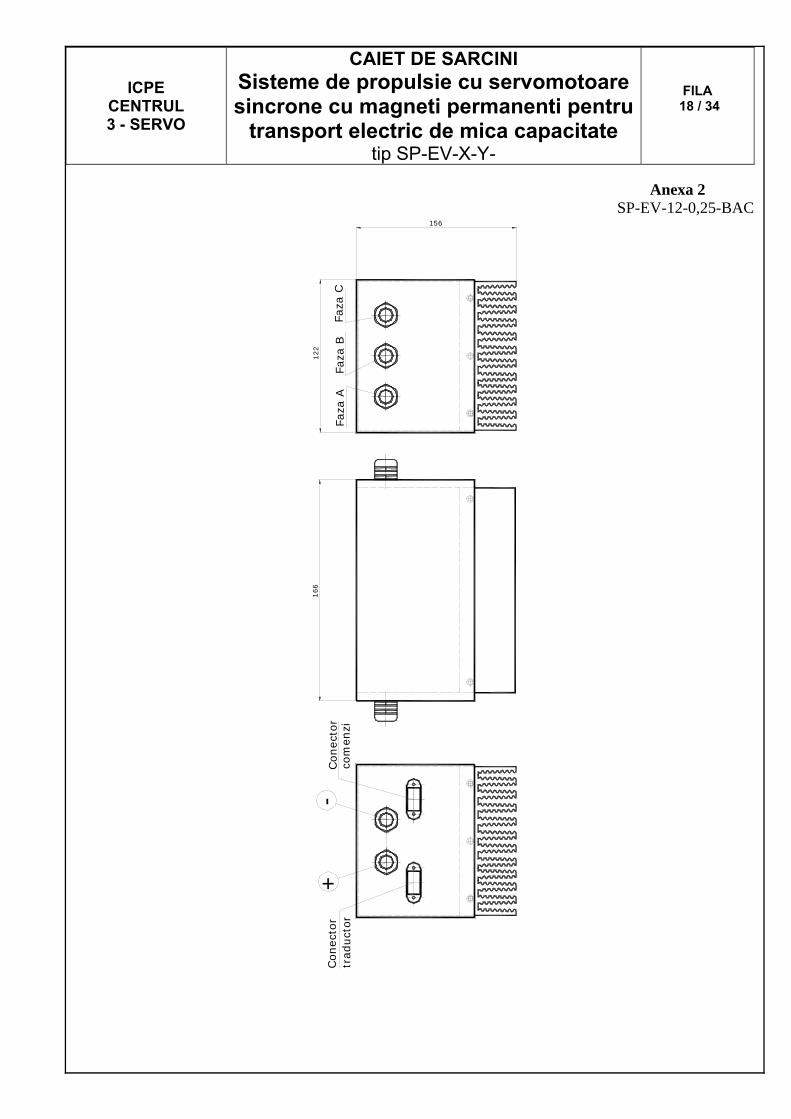
Anexa 2 SP-EV-12-0,25-BAC
122
166
156
Faza
AFa
za B
Faza
C+
-Conec
tor
Conec
tor
traduct
orco
men
zi
ICPE CENTRUL 3 - SERVO
CAIET DE SARCINI Sisteme de propulsie cu servomotoare sincrone cu magneti permanenti pentru
transport electric de mica capacitate tip SP-EV-X-Y-
FILA 19 / 34
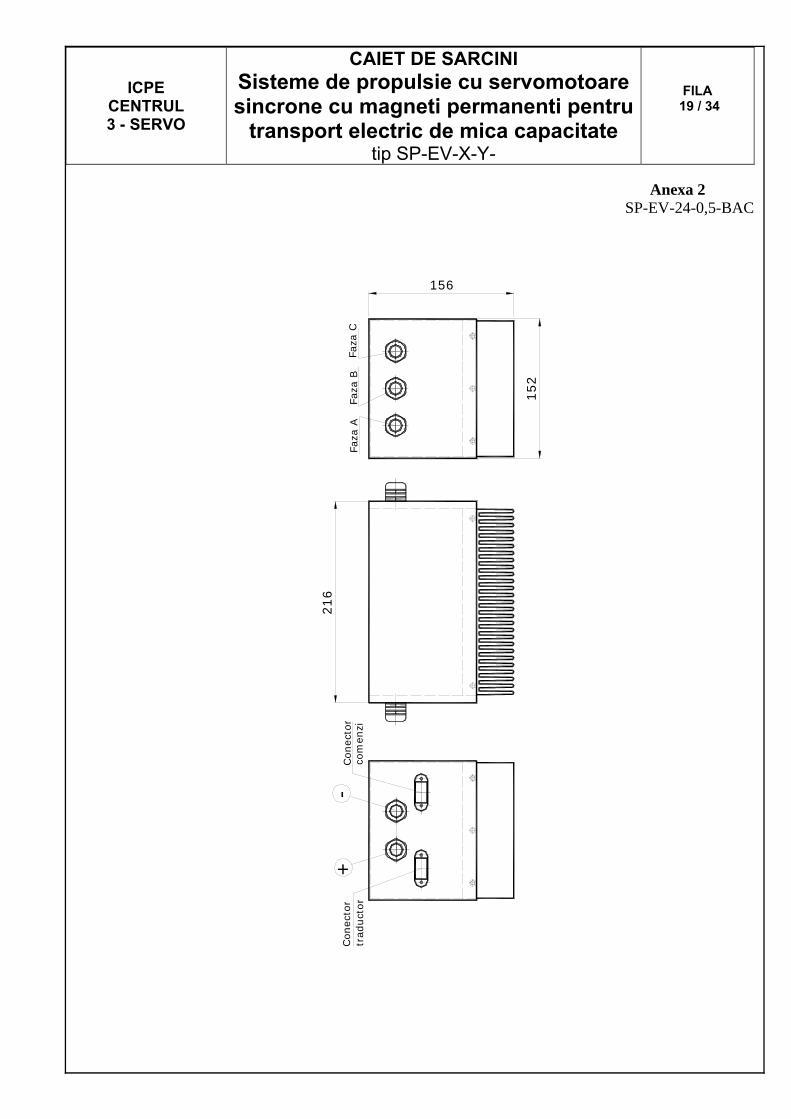
Anexa 2 SP-EV-24-0,5-BAC
152
216
156
Faza
AFa
za B
Faza
C+
-Con
ecto
rCon
ecto
rtr
aduct
or
com
enzi
ICPE CENTRUL 3 - SERVO
CAIET DE SARCINI Sisteme de propulsie cu servomotoare sincrone cu magneti permanenti pentru
transport electric de mica capacitate tip SP-EV-X-Y-
FILA 20 / 34
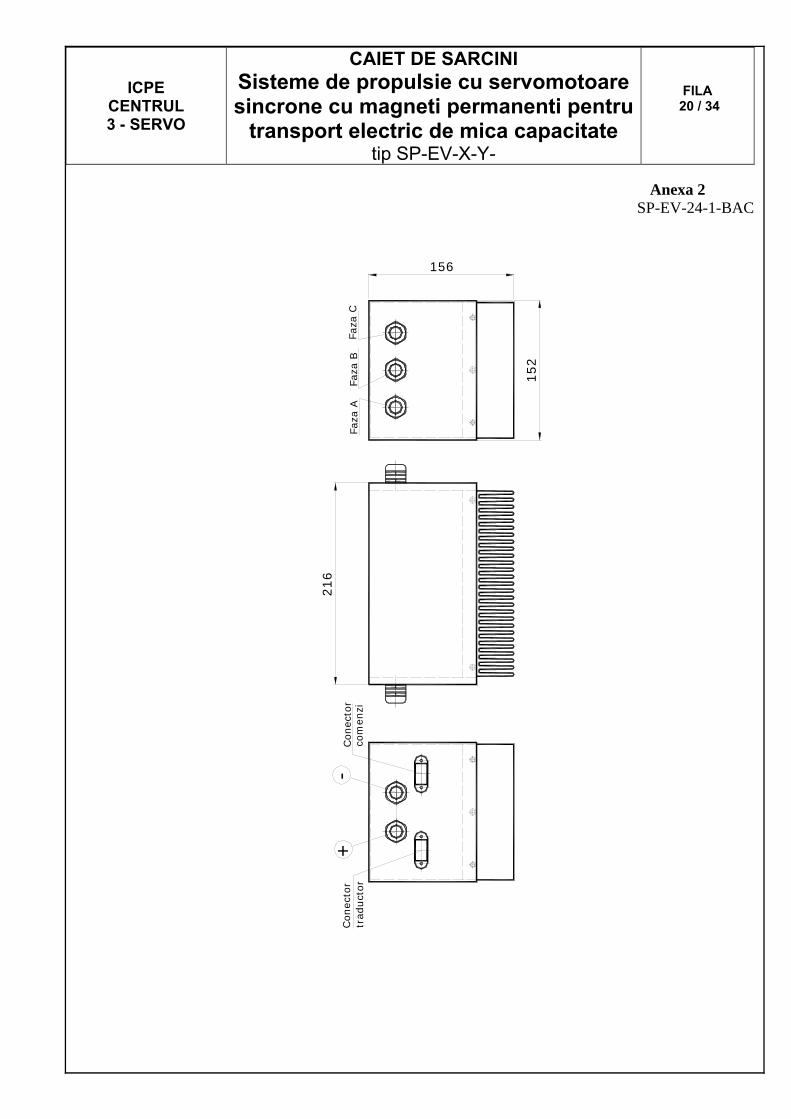
Anexa 2 SP-EV-24-1-BAC
152
216
156
Faza
AFa
za B
Faza
C+
-Con
ecto
rCon
ecto
rtr
aduct
or
com
enzi
ICPE CENTRUL 3 - SERVO
CAIET DE SARCINI Sisteme de propulsie cu servomotoare sincrone cu magneti permanenti pentru
transport electric de mica capacitate tip SP-EV-X-Y-
FILA 21 / 34
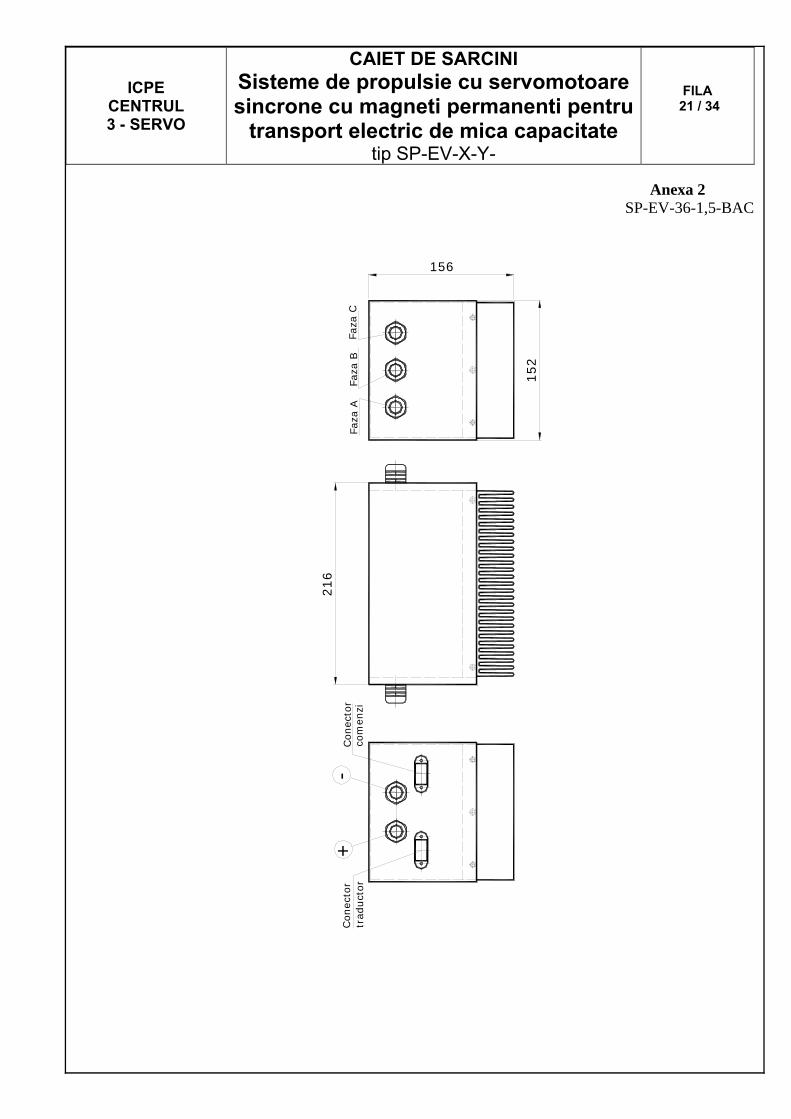
Anexa 2 SP-EV-36-1,5-BAC
152
216
156
Faza
AFa
za B
Faza
C+
-Con
ecto
rCon
ecto
rtr
aduct
or
com
enzi
ICPE CENTRUL 3 - SERVO
CAIET DE SARCINI Sisteme de propulsie cu servomotoare sincrone cu magneti permanenti pentru
transport electric de mica capacitate tip SP-EV-X-Y-
FILA 22 / 34
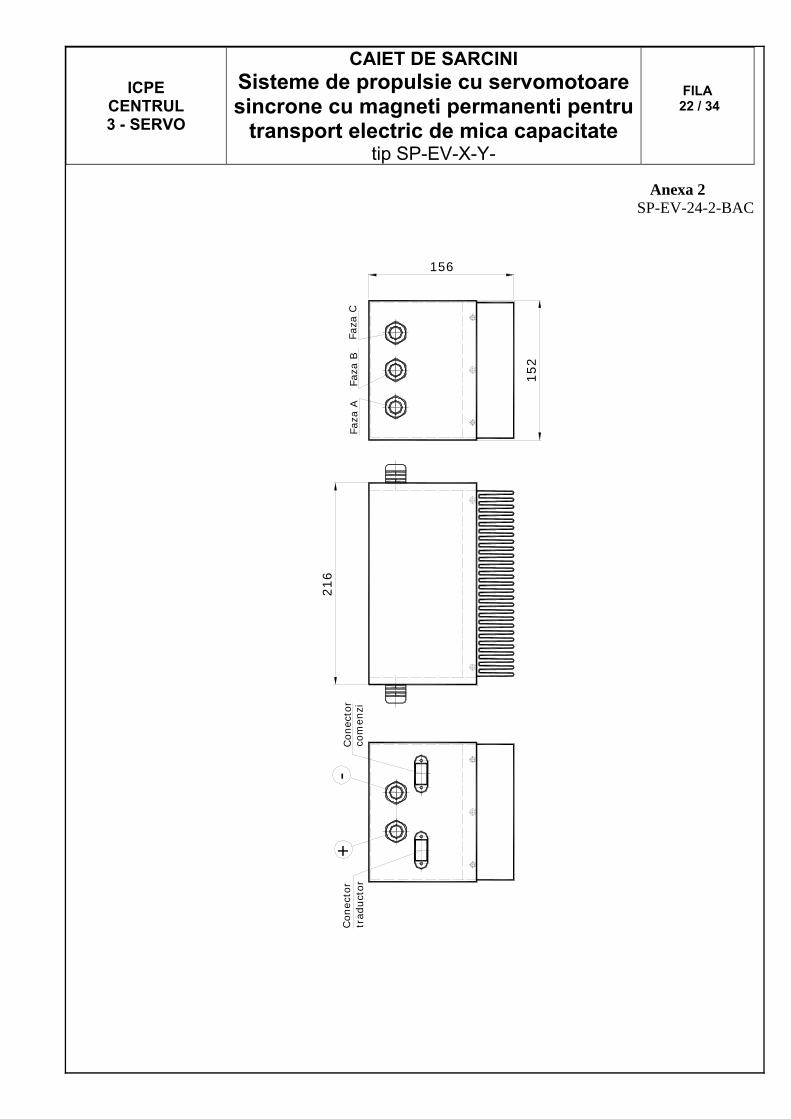
Anexa 2 SP-EV-24-2-BAC
152
216
156
Faza
AFa
za B
Faza
C+
-Con
ecto
rCon
ecto
rtr
aduct
or
com
enzi
ICPE CENTRUL 3 - SERVO
CAIET DE SARCINI Sisteme de propulsie cu servomotoare sincrone cu magneti permanenti pentru
transport electric de mica capacitate tip SP-EV-X-Y-
FILA 23 / 34
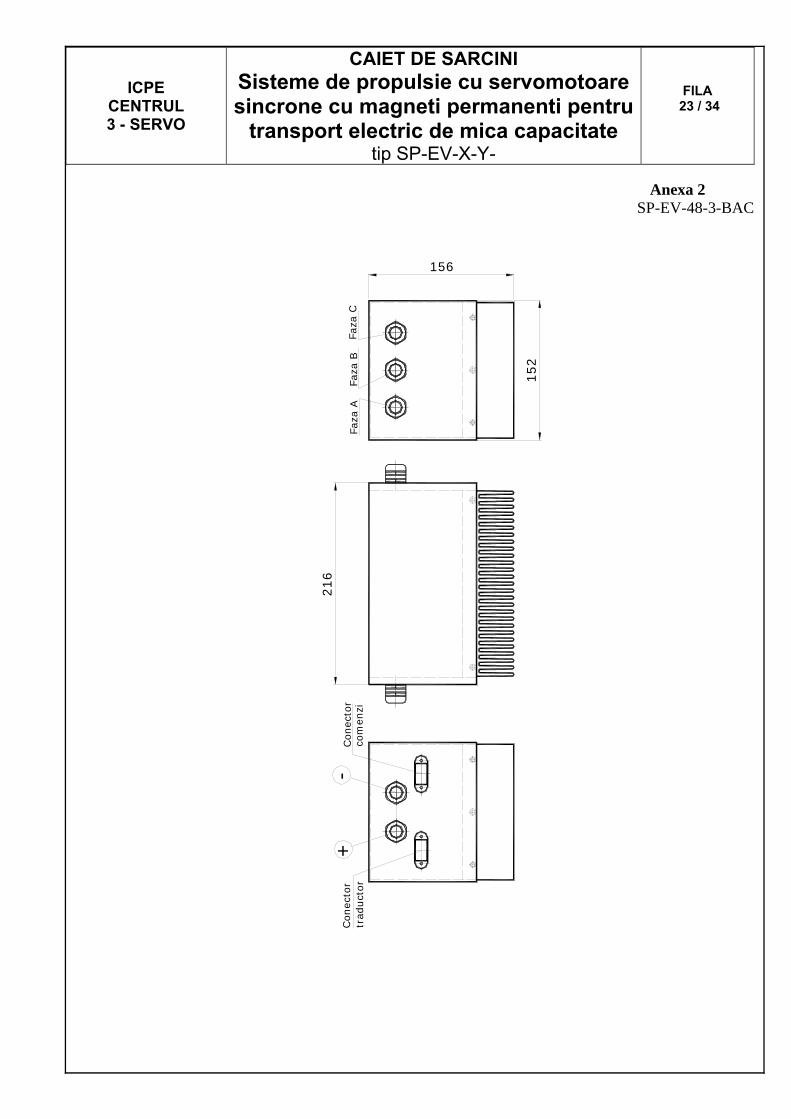
Anexa 2 SP-EV-48-3-BAC
152
216
156
Faza
AFa
za B
Faza
C+
-Con
ecto
rCon
ecto
rtr
aduct
or
com
enzi
ICPE CENTRUL 3 - SERVO
CAIET DE SARCINI Sisteme de propulsie cu servomotoare sincrone cu magneti permanenti pentru
transport electric de mica capacitate tip SP-EV-X-Y-
FILA 24 / 34
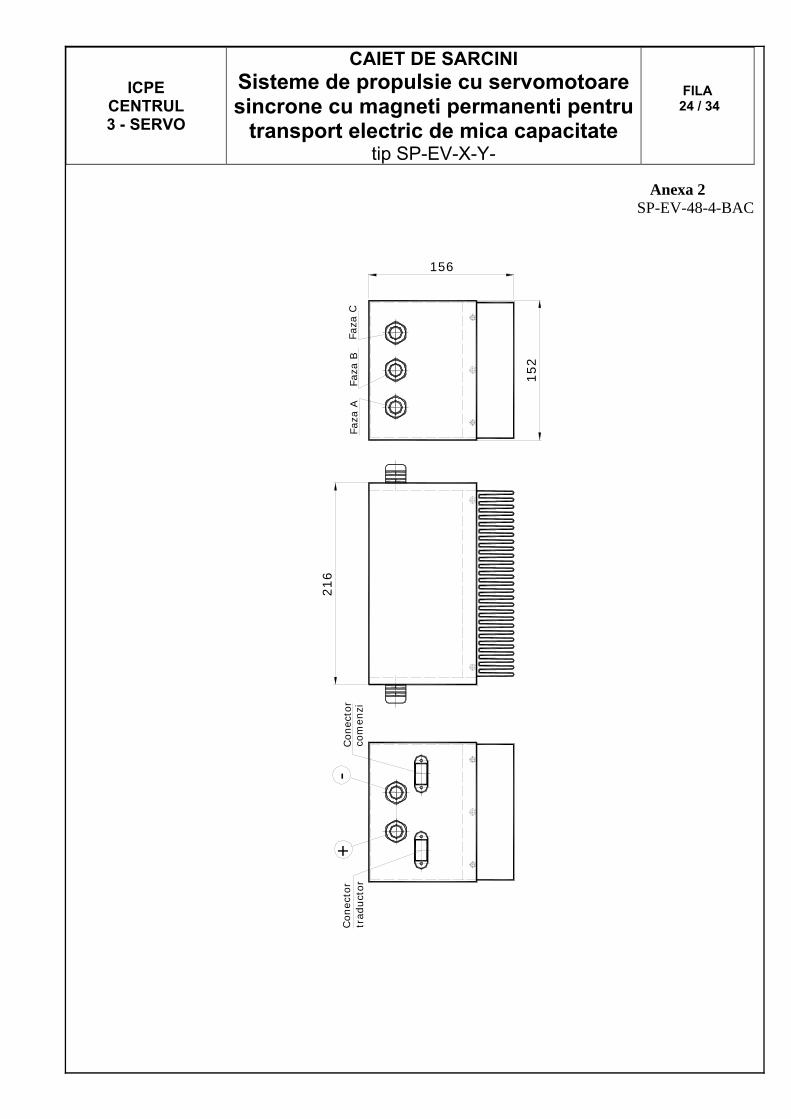
Anexa 2 SP-EV-48-4-BAC
152
216
156
Faza
AFa
za B
Faza
C+
-Con
ecto
rCon
ecto
rtr
aduct
or
com
enzi
ICPE CENTRUL 3 - SERVO
CAIET DE SARCINI Sisteme de propulsie cu servomotoare sincrone cu magneti permanenti pentru
transport electric de mica capacitate tip SP-EV-X-Y-
FILA 25 / 34
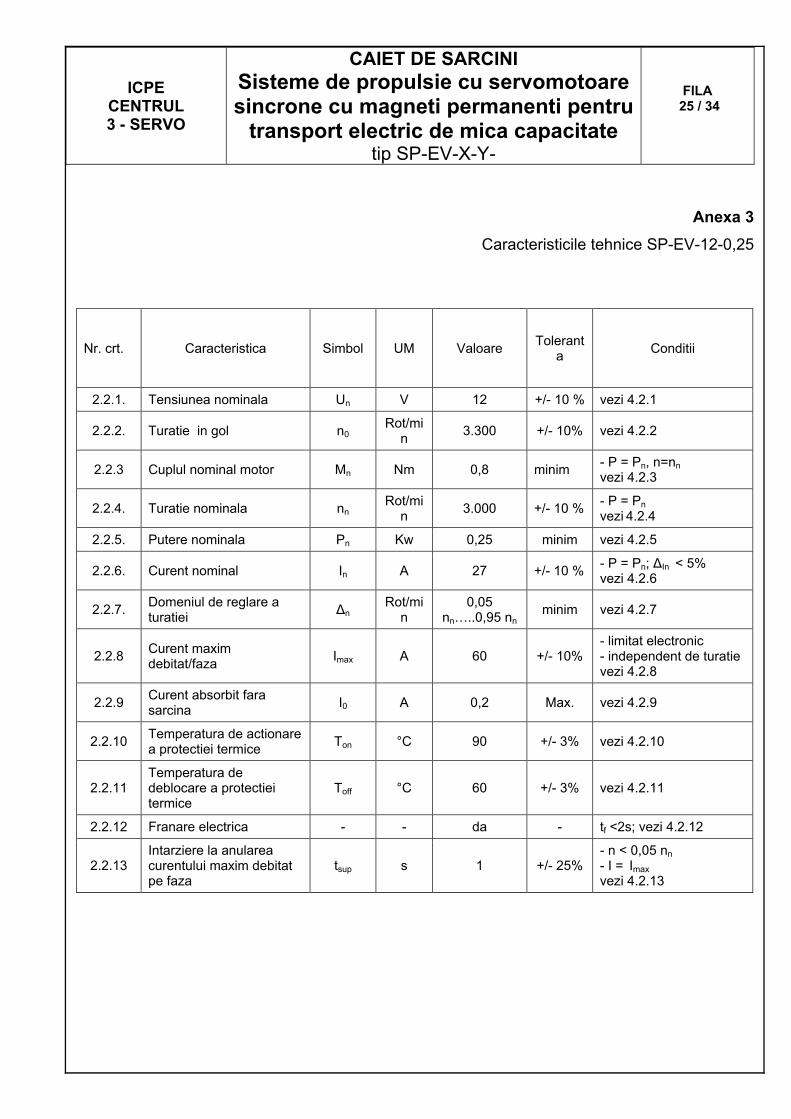
Anexa 3
Caracteristicile tehnice SP-EV-12-0,25
Nr. crt. Caracteristica Simbol UM Valoare Tolerant
a Conditii
2.2.1. Tensiunea nominala Un V 12 +/- 10 % vezi 4.2.1
2.2.2. Turatie in gol n0 Rot/mi
n 3.300 +/- 10% vezi 4.2.2
2.2.3 Cuplul nominal motor Mn Nm 0,8 minim - P = Pn, n=nn
vezi 4.2.3
2.2.4. Turatie nominala nn Rot/mi
n 3.000 +/- 10 %
- P = Pn vezi 4.2.4
2.2.5. Putere nominala Pn Kw 0,25 minim vezi 4.2.5
2.2.6. Curent nominal In A 27 +/- 10 % - P = Pn; ΔIn < 5% vezi 4.2.6
2.2.7. Domeniul de reglare a turatiei
Δn Rot/mi
n 0,05
nn…..0,95 nn minim vezi 4.2.7
2.2.8 Curent maxim debitat/faza
Imax A 60 +/- 10% - limitat electronic - independent de turatie vezi 4.2.8
2.2.9 Curent absorbit fara sarcina
I0 A 0,2 Max. vezi 4.2.9
2.2.10 Temperatura de actionare a protectiei termice
Ton °C 90 +/- 3% vezi 4.2.10
2.2.11 Temperatura de deblocare a protectiei termice
Toff °C 60 +/- 3% vezi 4.2.11
2.2.12 Franare electrica - - da - tf <2s; vezi 4.2.12
2.2.13 Intarziere la anularea curentului maxim debitat pe faza
tsup s 1 +/- 25% - n < 0,05 nn - I = Imax vezi 4.2.13

ICPE CENTRUL 3 - SERVO
CAIET DE SARCINI Sisteme de propulsie cu servomotoare sincrone cu magneti permanenti pentru
transport electric de mica capacitate tip SP-EV-X-Y-
FILA 26 / 34
Anexa 3
Caracteristicile tehnice SP-EV-24-0,5
Nr. crt. Caracteristica Simbol UM Valoare Tolerant
a Conditii
2.2.1. Tensiunea nominala Un V 24 +/- 10 % vezi 4.2.1
2.2.2. Turatie in gol n0 Rot/mi
n 4.400 +/- 10% vezi 4.2.2
2.2.3 Cuplul nominal motor Mn Nm 1,2 minim - P = Pn, n=nn
vezi 4.2.3
2.2.4. Turatie nominala nn Rot/mi
n 4.000 +/- 10 %
- P = Pn vezi 4.2.4
2.2.5. Putere nominala Pn Kw 0,5 minim vezi 4.2.5
2.2.6. Curent nominal In A 25 +/- 10 % - P = Pn; ΔIn < 5% vezi 4.2.6
2.2.7. Domeniul de reglare a turatiei
Δn Rot/mi
n 0,05
nn…..0,95 nn minim vezi 4.2.7
2.2.8 Curent maxim debitat/faza
Imax A 40 +/- 10% - limitat electronic - independent de turatie vezi 4.2.8
2.2.9 Curent absorbit fara sarcina
I0 A 0,18 Max. vezi 4.2.9
2.2.10 Temperatura de actionare a protectiei termice
Ton °C 90 +/- 3% vezi 4.2.10
2.2.11 Temperatura de deblocare a protectiei termice
Toff °C 60 +/- 3% vezi 4.2.11
2.2.12 Franare electrica - - da - tf <2s; vezi 4.2.12
2.2.13 Intarziere la anularea curentului maxim debitat pe faza
tsup s 1 +/- 25% - n < 0,05 nn - I = Imax vezi 4.2.13
ICPE CENTRUL 3 - SERVO
CAIET DE SARCINI Sisteme de propulsie cu servomotoare sincrone cu magneti permanenti pentru
transport electric de mica capacitate tip SP-EV-X-Y-
FILA 27 / 34
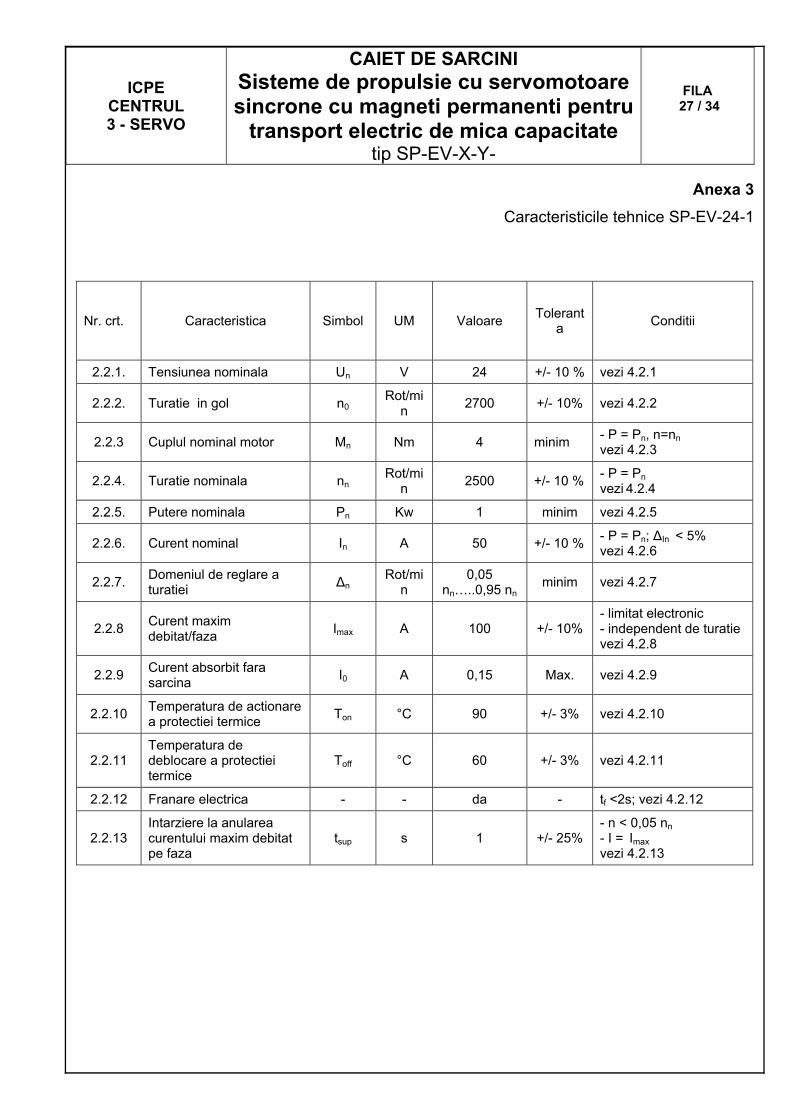
Anexa 3
Caracteristicile tehnice SP-EV-24-1
Nr. crt. Caracteristica Simbol UM Valoare Tolerant
a Conditii
2.2.1. Tensiunea nominala Un V 24 +/- 10 % vezi 4.2.1
2.2.2. Turatie in gol n0 Rot/mi
n 2700 +/- 10% vezi 4.2.2
2.2.3 Cuplul nominal motor Mn Nm 4 minim - P = Pn, n=nn
vezi 4.2.3
2.2.4. Turatie nominala nn Rot/mi
n 2500 +/- 10 %
- P = Pn vezi 4.2.4
2.2.5. Putere nominala Pn Kw 1 minim vezi 4.2.5
2.2.6. Curent nominal In A 50 +/- 10 % - P = Pn; ΔIn < 5% vezi 4.2.6
2.2.7. Domeniul de reglare a turatiei
Δn Rot/mi
n 0,05
nn…..0,95 nn minim vezi 4.2.7
2.2.8 Curent maxim debitat/faza
Imax A 100 +/- 10% - limitat electronic - independent de turatie vezi 4.2.8
2.2.9 Curent absorbit fara sarcina
I0 A 0,15 Max. vezi 4.2.9
2.2.10 Temperatura de actionare a protectiei termice
Ton °C 90 +/- 3% vezi 4.2.10
2.2.11 Temperatura de deblocare a protectiei termice
Toff °C 60 +/- 3% vezi 4.2.11
2.2.12 Franare electrica - - da - tf <2s; vezi 4.2.12
2.2.13 Intarziere la anularea curentului maxim debitat pe faza
tsup s 1 +/- 25% - n < 0,05 nn - I = Imax vezi 4.2.13

ICPE CENTRUL 3 - SERVO
CAIET DE SARCINI Sisteme de propulsie cu servomotoare sincrone cu magneti permanenti pentru
transport electric de mica capacitate tip SP-EV-X-Y-
FILA 28 / 34
Anexa 3
Caracteristicile tehnice SP-EV-36-1,5
Nr. crt. Caracteristica Simbol UM Valoare Tolerant
a Conditii
2.2.1. Tensiunea nominala Un V 36 +/- 10 % vezi 4.2.1
2.2.2. Turatie in gol n0 Rot/mi
n 3.000 +/- 10% vezi 4.2.2
2.2.3 Cuplul nominal motor Mn Nm 5,3 minim - P = Pn, n=nn
vezi 4.2.3
2.2.4. Turatie nominala nn Rot/mi
n 2700 +/- 10 %
- P = Pn vezi 4.2.4
2.2.5. Putere nominala Pn Kw 1,5 minim vezi 4.2.5
2.2.6. Curent nominal In A 45 +/- 10 % - P = Pn; ΔIn < 5% vezi 4.2.6
2.2.7. Domeniul de reglare a turatiei
Δn Rot/mi
n 0,05
nn…..0,95 nn minim vezi 4.2.7
2.2.8 Curent maxim debitat/faza
Imax A 65 +/- 10% - limitat electronic - independent de turatie vezi 4.2.8
2.2.9 Curent absorbit fara sarcina
I0 A 0,12 Max. vezi 4.2.9
2.2.10 Temperatura de actionare a protectiei termice
Ton °C 90 +/- 3% vezi 4.2.10
2.2.11 Temperatura de deblocare a protectiei termice
Toff °C 60 +/- 3% vezi 4.2.11
2.2.12 Franare electrica - - da - tf <2s; vezi 4.2.12
2.2.13 Intarziere la anularea curentului maxim debitat pe faza
tsup s 1 +/- 25% - n < 0,05 nn - I = Imax vezi 4.2.13

ICPE CENTRUL 3 - SERVO
CAIET DE SARCINI Sisteme de propulsie cu servomotoare sincrone cu magneti permanenti pentru
transport electric de mica capacitate tip SP-EV-X-Y-
FILA 29 / 34
Anexa 3
Caracteristicile tehnice SP-EV-24-2
Nr. crt. Caracteristica Simbol UM Valoare Tolerant
a Conditii
2.2.1. Tensiunea nominala Un V 24 +/- 10 % vezi 4.2.1
2.2.2. Turatie in gol n0 Rot/mi
n 3600 +/- 10% vezi 4.2.2
2.2.3 Cuplul nominal motor Mn Nm 6 minim - P = Pn, n=nn
vezi 4.2.3
2.2.4. Turatie nominala nn Rot/mi
n 3200 +/- 10 %
- P = Pn vezi 4.2.4
2.2.5. Putere nominala Pn Kw 2 minim vezi 4.2.5
2.2.6. Curent nominal In A 95 +/- 10 % - P = Pn; ΔIn < 5% vezi 4.2.6
2.2.7. Domeniul de reglare a turatiei
Δn Rot/mi
n 0,05
nn…..0,95 nn minim vezi 4.2.7
2.2.8 Curent maxim debitat/faza
Imax A 110 +/- 10% - limitat electronic - independent de turatie vezi 4.2.8
2.2.9 Curent absorbit fara sarcina
I0 A 0,2 Max. vezi 4.2.9
2.2.10 Temperatura de actionare a protectiei termice
Ton °C 90 +/- 3% vezi 4.2.10
2.2.11 Temperatura de deblocare a protectiei termice
Toff °C 60 +/- 3% vezi 4.2.11
2.2.12 Franare electrica - - da - tf <2s; vezi 4.2.12
2.2.13 Intarziere la anularea curentului maxim debitat pe faza
tsup s 1 +/- 25% - n < 0,05 nn - I = Imax vezi 4.2.13
ICPE CENTRUL 3 - SERVO
CAIET DE SARCINI Sisteme de propulsie cu servomotoare sincrone cu magneti permanenti pentru
transport electric de mica capacitate tip SP-EV-X-Y-
FILA 30 / 34
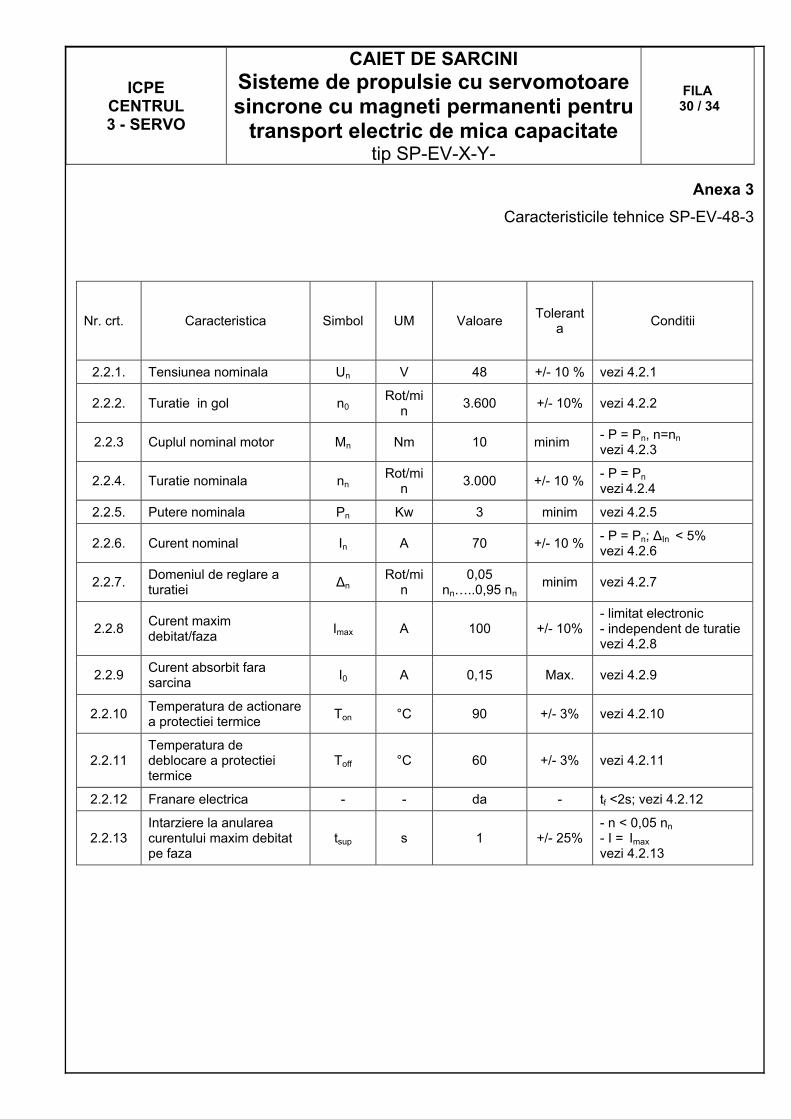
Anexa 3
Caracteristicile tehnice SP-EV-48-3
Nr. crt. Caracteristica Simbol UM Valoare Tolerant
a Conditii
2.2.1. Tensiunea nominala Un V 48 +/- 10 % vezi 4.2.1
2.2.2. Turatie in gol n0 Rot/mi
n 3.600 +/- 10% vezi 4.2.2
2.2.3 Cuplul nominal motor Mn Nm 10 minim - P = Pn, n=nn
vezi 4.2.3
2.2.4. Turatie nominala nn Rot/mi
n 3.000 +/- 10 %
- P = Pn vezi 4.2.4
2.2.5. Putere nominala Pn Kw 3 minim vezi 4.2.5
2.2.6. Curent nominal In A 70 +/- 10 % - P = Pn; ΔIn < 5% vezi 4.2.6
2.2.7. Domeniul de reglare a turatiei
Δn Rot/mi
n 0,05
nn…..0,95 nn minim vezi 4.2.7
2.2.8 Curent maxim debitat/faza
Imax A 100 +/- 10% - limitat electronic - independent de turatie vezi 4.2.8
2.2.9 Curent absorbit fara sarcina
I0 A 0,15 Max. vezi 4.2.9
2.2.10 Temperatura de actionare a protectiei termice
Ton °C 90 +/- 3% vezi 4.2.10
2.2.11 Temperatura de deblocare a protectiei termice
Toff °C 60 +/- 3% vezi 4.2.11
2.2.12 Franare electrica - - da - tf <2s; vezi 4.2.12
2.2.13 Intarziere la anularea curentului maxim debitat pe faza
tsup s 1 +/- 25% - n < 0,05 nn - I = Imax vezi 4.2.13
ICPE CENTRUL 3 - SERVO
CAIET DE SARCINI Sisteme de propulsie cu servomotoare sincrone cu magneti permanenti pentru
transport electric de mica capacitate tip SP-EV-X-Y-
FILA 31 / 34
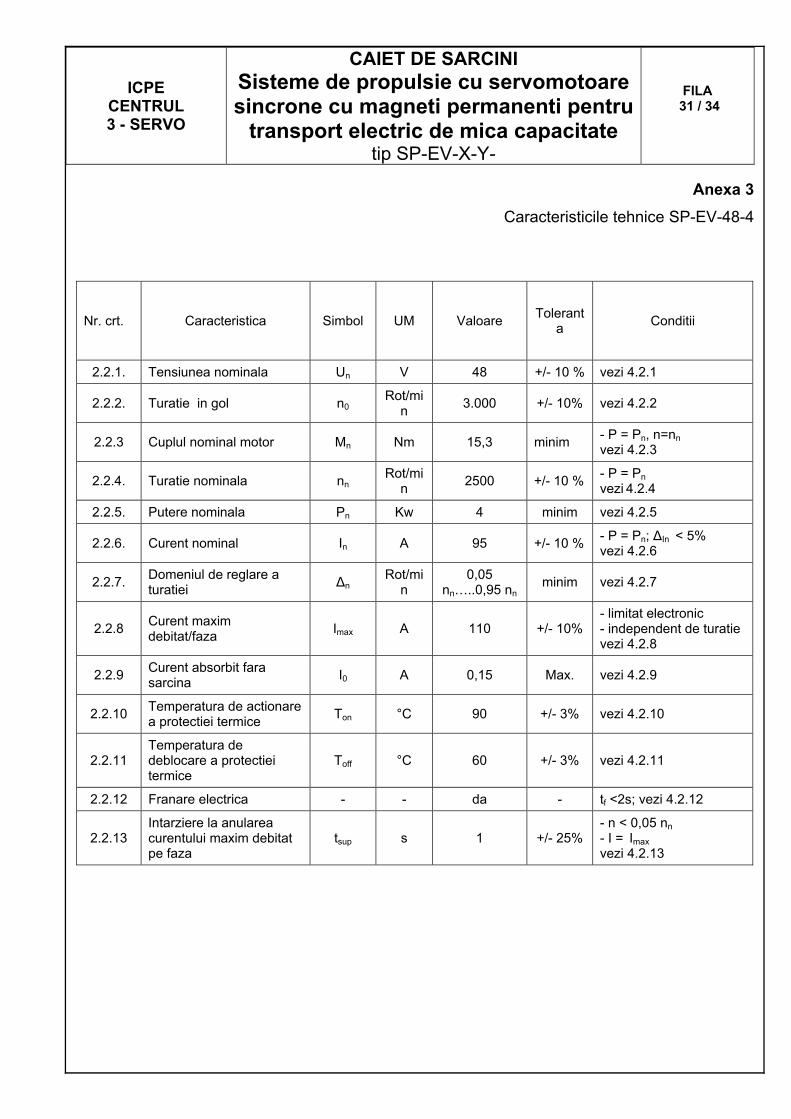
Anexa 3
Caracteristicile tehnice SP-EV-48-4
Nr. crt. Caracteristica Simbol UM Valoare Tolerant
a Conditii
2.2.1. Tensiunea nominala Un V 48 +/- 10 % vezi 4.2.1
2.2.2. Turatie in gol n0 Rot/mi
n 3.000 +/- 10% vezi 4.2.2
2.2.3 Cuplul nominal motor Mn Nm 15,3 minim - P = Pn, n=nn
vezi 4.2.3
2.2.4. Turatie nominala nn Rot/mi
n 2500 +/- 10 %
- P = Pn vezi 4.2.4
2.2.5. Putere nominala Pn Kw 4 minim vezi 4.2.5
2.2.6. Curent nominal In A 95 +/- 10 % - P = Pn; ΔIn < 5% vezi 4.2.6
2.2.7. Domeniul de reglare a turatiei
Δn Rot/mi
n 0,05
nn…..0,95 nn minim vezi 4.2.7
2.2.8 Curent maxim debitat/faza
Imax A 110 +/- 10% - limitat electronic - independent de turatie vezi 4.2.8
2.2.9 Curent absorbit fara sarcina
I0 A 0,15 Max. vezi 4.2.9
2.2.10 Temperatura de actionare a protectiei termice
Ton °C 90 +/- 3% vezi 4.2.10
2.2.11 Temperatura de deblocare a protectiei termice
Toff °C 60 +/- 3% vezi 4.2.11
2.2.12 Franare electrica - - da - tf <2s; vezi 4.2.12
2.2.13 Intarziere la anularea curentului maxim debitat pe faza
tsup s 1 +/- 25% - n < 0,05 nn - I = Imax vezi 4.2.13
ICPE CENTRUL 3 - SERVO
CAIET DE SARCINI Sisteme de propulsie cu servomotoare sincrone cu magneti permanenti pentru
transport electric de mica capacitate tip SP-EV-X-Y-
FILA 32 / 34
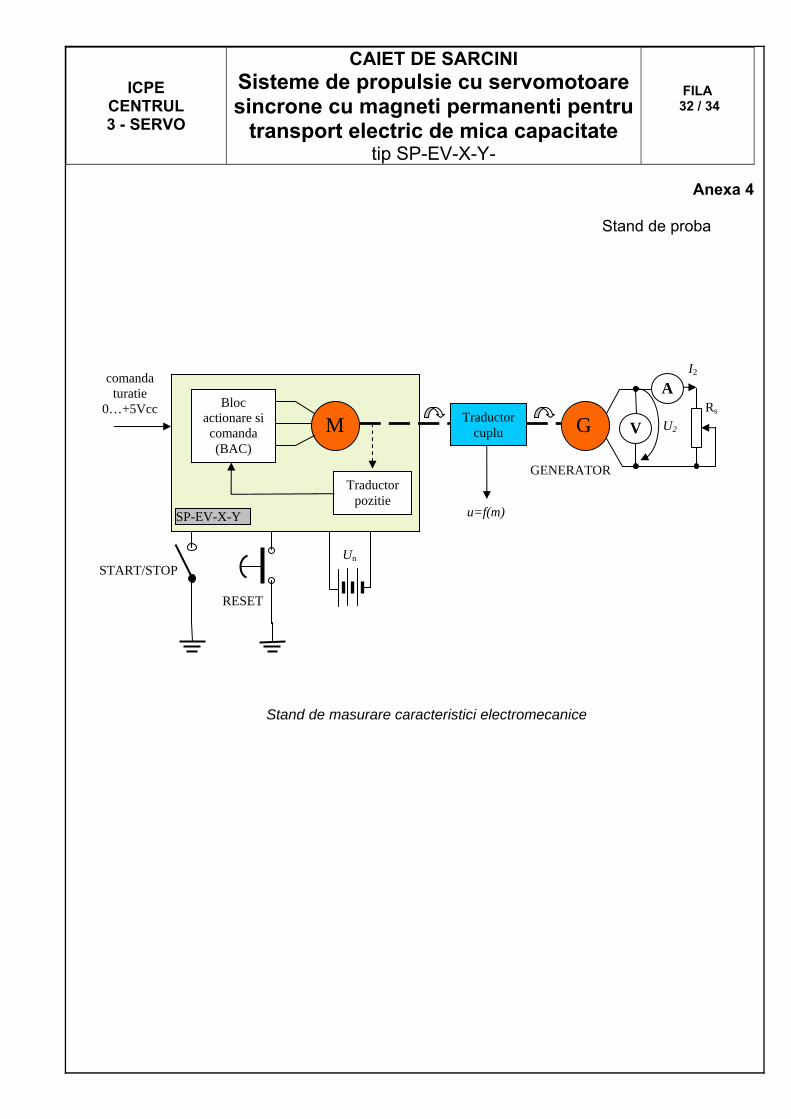
Anexa 4
Stand de proba
I2
comanda turatie
0…+5Vcc Bloc actionare si comanda (BAC)
M
Traductor pozitie
G Traductor cuplu
A
u=f(m)
V U2
Rs
SP-EV-X-Y
Un
GENERATOR
START/STOP
RESET
Stand de masurare caracteristici electromecanice
ICPE CENTRUL 3 - SERVO
CAIET DE SARCINI Sisteme de propulsie cu servomotoare sincrone cu magneti permanenti pentru
transport electric de mica capacitate tip SP-EV-X-Y-
FILA 33 / 34
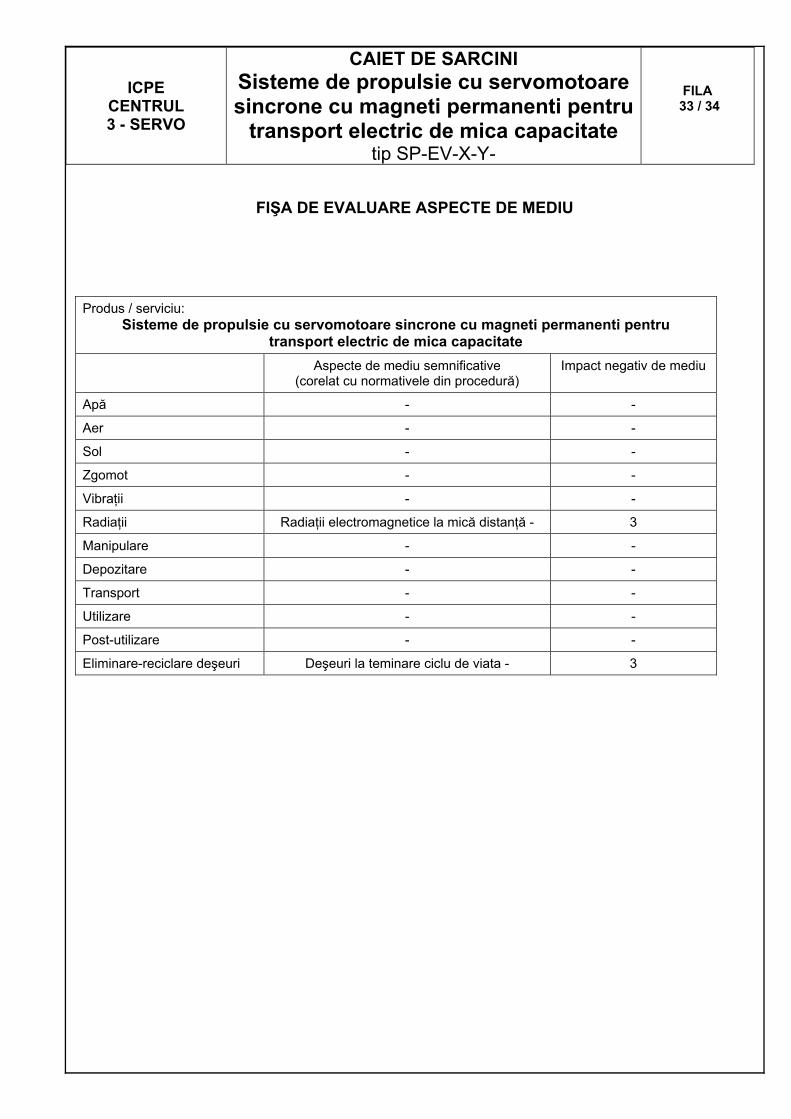
FIŞA DE EVALUARE ASPECTE DE MEDIU
Produs / serviciu: Sisteme de propulsie cu servomotoare sincrone cu magneti permanenti pentru
transport electric de mica capacitate
Aspecte de mediu semnificative (corelat cu normativele din procedură)
Impact negativ de mediu
Apă - -
Aer - -
Sol - -
Zgomot - -
Vibraţii - -
Radiaţii Radiaţii electromagnetice la mică distanţă - 3
Manipulare - -
Depozitare - -
Transport - -
Utilizare - -
Post-utilizare - -
Eliminare-reciclare deşeuri Deşeuri la teminare ciclu de viata - 3
ICPE CENTRUL 3 - SERVO
CAIET DE SARCINI Sisteme de propulsie cu servomotoare sincrone cu magneti permanenti pentru
transport electric de mica capacitate tip SP-EV-X-Y-
FILA 34 / 34
INDICATORUL MODIFICARILOR
Data înregistrării
Nr. documentului şi data intrării în vigoare
Titlul documentului de modificare
Inregistrat: Numele prenumele
semnătura si ştampila