curs3_2012.pdf
56
Convertoare statice CURS 3 http://www.conv.pub.ro/conv_stat/
-
Upload
alex-rob-robert -
Category
Documents
-
view
22 -
download
2
Transcript of curs3_2012.pdf

Convertoare statice
CURS 3
http://www.conv.pub.ro/conv_stat/

2.3. Caracteristica dinamica
Amorsarea tiristorului, ca şi blocarea lui, nu se produc instantaneu, ci necesită un anumitinterval de timp, numit regim dinamic, regim de comutaţie sau regim tranzitoriu. Variaţia în timpa curentului prin tiristor şi a tensiunii la bornele sale pe durata regimului dinamic reprezintăcaracteristica dinamică a dispozitivului semiconductor.
Performanţele dinamice ale tiristoarelor depind în mare măsură de caracteristicile semnaluluide comandă, ale circuitului de sarcină şi de temperatura de funcţionare. Cunoaştereacaracteristicilor dinamice ale tiristorului este importantă pentru a-i putea stabili limitele defuncţionare în regimul tranzitoriu al sarcinii, în aşa fel încât el să nu se deterioreze.
2.3.1. Amorsarea tiristorului
2
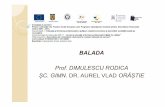
În mod normal, în cadrul convertorului static de putere, tiristorul blochează în direct o tensiune VD şi la momentul t1 primeşte un curent de comandă iG pe poartă, care îi determină amorsarea. Curentul iG are un timp de creştere tcr şi o amplitudine IGM . Variaţia în timp a mărimilor : curent de comandă iG , curent prin tiristor iT , tensiune la bornele tiristorului vT şi putere
disipată la amorsare pTT , este prezentată în figura urmatoare.

t
i GIGM
diG
dt
i T
t r
TTp
TTP
TI
Ti
0,25IRRM
0,9I
diTdt
1t
Tv
GiG
TiA K+ -
t fr
I D
t
t s t f
di T
dt
trr
t 2
Qsdi T
dt
IR
comanda
0,9I
0,1I
GM
GM
∆
3
t
dvT
dt
VD
t 4
t 3VTM
dvR
dt
RV
RM t0
DVT
v0,9I
I
sptgrgdt
gtt
Qs
Q fdt rec
t q0,9V
0,1V
t
V
Conducţ ie
Neco
mandat
RRM
RRM
D
D
Comutaţ ie
Amorsare Comutaţ ie
Blocare
Blocat în
invers
Blocat în
direct

EXPLICATII
La primirea comenzii de amorsare, densitatea de curent nu este uniformă pe suprafaţacatodului, datorită construcţiei specifice a stratului p slab dopat şi a electrodului de comandă. Înapropierea acestui electrod densitatea de curent este mult mai mare, deoarece la începutulamorsării curentul total al tiristorului circulă printr-o secţiune redusă din semiconductor. Aria deconducţie se extinde cu o viteză constantă, care depinde de poziţia electrodului de comandă. Dinacest motiv, tensiunea pe tiristor rămâne practic constantă la valoarea VD un interval de timp dupăaplicarea comenzii de amorsare. Apoi, tensiunea scade rapid, odată cu creşterea curentului printiristor.
Fenomenul de amorsare se caracterizează prin timpul tgt numit timp de amorsare sau de
intrare în conducţie. Acesta are două componente :
4
intrare în conducţie. Acesta are două componente : tgd timpul de întârziere , care reprezintă intervalul de timp măsurat din momentul
aplicării semnalului de comandă pe poartă (t1) şi până când tensiunea pe tiristor scade lavaloarea 0,9VD ; tgr timpul de creştere, care reprezintă intervalul de timp în care tensiunea pe tiristor
scade de la 0,9VD la 0,1VD .
Deci :grgdgt ttt +=

EXPLICATII
Se mai defineşte tsp timpul de răspândire ca intervalul de timp în care tensiunea pe tiristorscade de la valoarea 0,1VD la valoarea tensiunii corespunzătoare conducţiei în direct, VT . Lasfârşitul intervalului de timp tsp conducţia curentului este extinsă pe toată suprafaţa catodului.
Pe pe durata timpului de creştere, atât curentul, cât şi tensiunea au valori semnificative.Creşterea rapidă a curentului prin tiristor iT în acest interval de timp, concomitent cu scădereatensiunii, determină disiparea unei puteri pTT considerabile. Vârful de putere poate să atingăcâţiva kW şi datorită supraîncălzirii locale apărute, structura semiconductoare să se distrugăelectrotermic. Amplitudinea vârfului de putere este determinată de panta de creştere diT /dt acurentului prin tiristor, pantă dictată de sarcina conectată în circuitul anodic.
5
Încălzirea prin efect diT /dt este cu atât mai accentuată în primele milisecunde, cu cât curentulIT este mai mare. Durata de viaţă a unui tiristor este condiţionată de solicitarea sa prin diT /dt.
Fabricantii indică în catalog o viteză critică de creştere a curentului diT /dt în stare deconducţie, pentru condiţii de sarcină şi comandă bine precizate. Această viteză critică(di /dt)crit reprezintă valoarea maxim permisă de creştere a curentului, astfel încât tiristorul să fieferit de distrugere şi să i se asigure o fiabilitate rezonabilă. Tiristoarele moderne au pantacuprinsă între 300A/µs şi 1000 A/µs.

Panta maximă admisibilă de creştere a curentului la care poate fi utilizat un tiristor în cadrulunui circuit al unui convertor static de putere, depinde în principal de trei factori :
frecvenţa de comutaţie impusă de convertorul static, f0 ;tensiunea directă pe care tiristorul a blocat-o înainte de amorsare, VD ;parametrii impulsului de comandă.
În cataloage se dau curbe de corecţie a pantei maxime admise diT/dt , funcţie de variaţia acestorparametri faţă de valorile pentru care s-a indicat (di /dt)crit .
EXPLICATII
6

2.3.2. Blocarea tiristorului
Tiristorul se blochează dacă purtătorii de sarcină existenţi în diferitele lui zone se reduc, încâtsă nu mai fie posibilă autoîntreţinerea reacţiei interne de curent. Micşorarea a curentului anodic iT
sub valoarea curentului de menţinere IH, determină acest fenomen.În cadrul convertoarelor statice de putere, de obicei tiristoarele sunt blocate prin aplicarea unei
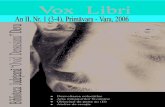
tensiuni inverse VR între anod şi catod, iar după blocare, trebuie să suporte o tensiune directă VD , fără să reamorseze. Pentru un asemenea mod de blocare, variaţia în timp a curentului prin tiristor iT şi a tensiunii la bornele tiristorului vT au fost prezentate:.
i GIGM
diG
dt
1t
v
GiG
TiA K+ -comanda
0,9I
0,1I
GM
GM
7
t
dvT
dt
VD
t 4
t 3VTM
dvR
dt
RV
RM t0
t
i T
t r
DVT
v
TTp
TTP
TI
Ti
0,25IRRM
0,9II
diTdt
sptgrgdtgtt
Tv
t fr
I D
t
t s t f
di T
dt
trr
t 2
Qs
Q f
di T
dt rec
t q
IR
0,9V
0,1V
t
V
GM
Conducţ ie
Neco
mandat
RRM
RRM
D
D
Comutaţ ie
Amorsare Comutaţ ie
Blocare
Blocat îninvers
Blocat îndirect
∆

EXPLICATII
Înaintea momentului t2 de aplicare a tensiunii inverse de blocare, tiristorul aflat în conducţieera străbătut de curentul direct IT şi prezenta la borne o cădere de tensiune VT . În cadrulprocesului tranzitoriu de blocare tiristorul atinge întâi starea de blocare la polarizare inversă şiapoi pe cea de blocare la polarizare directă.
La scăderea rapidă a curentului iT şi atingerea valorii IH a curentului de menţinere, tiristorul nuse blochează, datorită existenţei în exces a unei sarcini stocate în baza B2 a tranzistorului T2
cauzată de grosimea mare a acestui strat n şi slaba lui dopare. Curentul iT scade în continuarepână la valoarea negativă IRRM (la momentul notat cu t3). Tensiunea vT , la bornele tiristoruluirămâne pozitivă în tot acest timp. Curentul invers micşorează numărul de purtători acumulaţi înbazele tranzistoarelor echivalente şi, pe măsură ce baza B2 este eliberată de purtătorii minoritari,conducţia curentului se face din ce în ce mai greu, curentul prin tiristor tinzând către zero. În
8
conducţia curentului se face din ce în ce mai greu, curentul prin tiristor tinzând către zero. Înmomentul t3 joncţiunile J1 şi J3 sunt blocate şi începe procesul de revenire al joncţiunii centraleJ2 , astfel că tensiunea pe tiristor în acest moment este practic nulă.

EXPLICATII
Datorită existenţei inductivităţilor în circuitul de sarcină, după momentul t3, când începe variaţia bruscă a curentului de la valoarea IRRM la zero, la bornele tiristorului apare o supratensiune de comutaţie cu valoarea de vârf VRM . Amplitudinea VRM , dependentă de caracteristicile circuitului de sarcină, poate avea valori care să distrugă tiristorul, dacă VRM >VRRM
. În acest caz ea trebuie limitată la valori nepericuloase prin intermediul unui circuit de protecţie la supratensiuni, montat în paralel pe tiristor .
După momentul t4 , tiristorul are din nou aplicată o tensiune directă, pe care o blochează. Această tensiune creşte cu viteza dvT /dt către valoarea finală VD . Datorită capacităţii de barieră Cb , a joncţiunii J2 , joncţiune care trebuie să blocheze tensiunea VD , ia naştere un curent de deplasare :
vd
9
t
vCi T
bd d
d=
Dacă acest curent este mare din cauza unei viteze mari de creştere a tensiunii, el preia rolulcurentului de comandă iG şi poate produce amorsarea parazită a tiristorului. În cataloage se indicăvalori limită admise pentru viteza de creştere a tensiunii directe (dv /dt)crit , cuprinse în intervalul20…1000V/µs.

ts se numeşte timp de stocare şi este intervalul de timp din momentul trecerii curentului prinzero şi momentul t3 când curentul invers atinge valoarea IRRM ;tf se numeşte timp de cădere şi este intervalul de timp în care se consideră că are loc variaţia
curentului invers de la valoarea IRRM (apărută la momentul t3) la valoarea IR de regim staţionar,corespunzătoare blocării la polarizare inversă. El se măsoară între momentul t3 şi punctul deintersecţie a abscisei cu o dreaptă ajutătoare ∆. Dreapta ∆ se construieşte unind punctele deordonate 0,9IRRM şi 0,25IRRM şi aproximează variaţia curentul invers care scade de la IRRM la IR ;trr se numeşte timp de revenire şi este suma celor doi timpi definiţi anterior :
t se numeşte timp de blocare şi este intervalul de timp măsurat între momentul trecerii prin
DEFINITII
fsrr ttt +=
10
tq se numeşte timp de blocare şi este intervalul de timp măsurat între momentul trecerii prinzero a curentului anodic şi momentul când pe tiristor se poate aplica din nou o tensiune directă,fără ca acesta să reamorseze ;tfr se numeşte timp de revenire în direct şi este intervalul de timp măsurat din momentul t2 de
aplicare a tensiunii inverse VR şi până în momentul când pe tiristorul blocat se aplică întreagatensiune directă VD :
fsrr ttt +=
t
v
Vt
t
i
It
T
Dq
T
Tfr
d
d
d
d++
−
=

DEFINITII
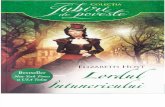
Qs se numeşte sarcină stocată şi reprezintă cantitatea de purtători de sarcină care circulă însens invers prin tiristor în intervalul de timp ts:
tiQt
Ts d0∫=
200
240
280
Qs[ As]µ
IT =800A
400A
200A
11
0 10 20 30 40 50 60 70 80 90 1000
40
80
120
160
diT/dt [A/ s]µ
100A
40A
20A
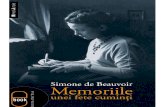
Variaţia sarcinii stocate pentru tiristorul T600F la
Tvj=125°C

DEFINITII
Qf se numeşte sarcină reziduală recombinată ;
tiQft
Ts d0∫=
Qrr se numeşte sarcină de revenire
2d
0
rrRRMt
Tfsrr
tItiQQQ
rr ⋅≅+= ∫
Având în vedere faptul că alura curentului iT este asemănătoare cu cea a curentului prin diodă se pot stabili relaţii similare :
12
t
i
Qt s
s
d
d
2
−
=⇒−=
t
iQI sRRM d
d2
( ) ( ) ( )
t
i
SI
t
it
ttI
I
ttItIQ
T
RRM
T
s
fsRRM
RRM
fsRRMrrRRM
rr
d
d2
1
d
d2
22
222
−
+⋅=
−
+⋅=
+⋅==
S
t
iQ
I
Trr
RRM+
−
=1
d
d
2

După mărimea lui tq tiristoarele se clasifică în :
tiristoare rapide, cu tq = 3… 50µs
tiristoare normale , cu tq =60… 300µs.
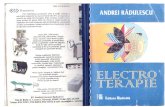
Timpul de blocare depinde în principal de şase parametri; această dependenţă este prezentatăcalitativ în figurile urmatoare:
tq IT2
I T1
<IT2I
T1tq tq
13
diTdt
TJI T
VR
V
DRM2
DRM1
>VDRM1V
DRM2
VD=0,67V
DRM
VD Tdtdv
tq tq
V
tq
Variaţia timpului de blocare tq=f(TJ, IT, -diT /dt, VR, dvT / dt, VD)

2.4. Comanda tiristoarelor
Amorsarea tiristoarelor poate fi voită, prin aplicarea unui semnal (electric sau luminos) de comandă pe poarta tiristorului, sau accidentală
2.4.1. Comanda tiristorului prin semnal electric
Comanda tiristorului pentru intrarea în conducţie se face injectând în circuitul porţii un curentiG, cu amplitudinea mai mare ca IGT, dar mai mică decât IGM, limitat de hiperbola de disipaţie.Schema electronică a circuitului de comandă este impusă de forma, amplitudinea şi durata pe caretrebuie să le aibă semnalul de comandă. Parametrii impulsului de comandă influenţează atâttimpul de întârziere la amorsare tgt , cât şi capabilitatea în di/dt a tiristorului.
Comanda porţii tiristorului se poate face în curent continuu, în curent alternativ sau cuimpulsuri de curent, forma comenzii alegându-se în funcţie de aplicaţia în care este utilizattiristorul. Pentru o comandă în curent continuu punctul de funcţionare M al circuitului de poartătrebuie să se afle în interiorul zonei de amorsare sigură, cât mai aproape de hiperbola de disipaţie4.
În mod uzual, în cadrul convertoarelor statice de putere amorsarea tiristoarelor se face prinintermediul unui impuls sau a unor trenuri de impulsuri. În acest caz, generatorul de comandătrebuie ales astfel încât punctul M de funcţionare să se deplaseze pe caracteristica individuală depoartă 5 numai în cadrul zonei 3 de amorsare sigură. Trebuie luată în consideraţie şi dependenţasuprafeţei zonei de amorsare sigură de temperatura TvJ a joncţiunii.

Un impuls de comandă cu durata mai mare de 100ms se consideră continuu, pentru că tiristorulse găseşte practic, după acest interval de timp, în regim static de funcţionare. Durata impulsuluide comandă trebuie să fie mai mare decât timpul de amorsare tgt şi suficientă pentru ca, printiristor, curentul anodic iT să atingă cel puţin valoarea curentului de acroşare IL.
v G
i G
R S
i T
i T
i G t
t
i T1 ( L ) S1 i T2
( L ) S2
L S1 L S2 <
t g1
I L
Corelaţie între durata impulsului de comandă şi viteza de creştere a curentului de sarcină
L S i G
t
t g1
t g2 t g1 t g2 , > t gt

0.8
1.2
2
1.6
IH
IH [25 C]
IL
IL [25 C]
I
Curentul de acroşare IL, ca şi curentul de menţinere IH scad cu creşterea temperaturii joncţiunii tiristorului
-25 0 +25 +50 +100-400
0.4
0.8
+125 +140
Tvj [ C]
IH
IL
Dependenţa curenţilor de acroşare şi menţinere de temperatura joncţiunii

Valoarea curentului de acroşare este dependentă şi de parametrii impulsului de comandă : amplitudinea IGM, panta diG/dt şi durata tg. Curentul IL scade sensibil cu creşterea amplitudinii curentului de comandă şi cu durata acestuia
0,5
1
1,5
2
tg=10 sµ
20 sµ 50 sµ
100 sµ
Tvj=25 Co
I [A]
IL[A]
0 0,4 0,8 1,2 1,60
IGM[A]
Influenţa caracteristicilor semnalului de comandă asupra curentului de acroşare
La estimarea valorii curentului de acroşare trebuie avută în vedere atât temperatura joncţiunii, cât şi caracteristicile semnalului de comandă

Pentru tiristoarele care funcţionează în circuite cu pantă de creştere de valoare mare acurentului de sarcină, ca şi pentru tiristoarele montate în serie sau în paralel, impulsul decomandă trebuie să fie un « impuls tare ».
Exemplu caracteristici impuls tare : IGM =3…6IGT la (-40°C); diG/dt >1A/µs; tr=0.1…1µs.
IGM
IGM
0.9
IGT
1.1
IGM
0.1
IGM
IGM
0.9
IGM
0.1
iG
t
iG
t 21µ t ttg tgt>trtr 21µs tg tgt>
t
a) b)
t
Impulsuri de comandă : a) tare ; b )slab.
Pentru tiristoarele care funcţionează în circuite de curent alternativ cu frecvenţa de 50 Hz, unde panta de creştere a curentului la amorsare are valori mici, impulsul utilizat poate fi de tipul « slab », dreptunghiular, fără supracreştere.
Exemplu caracteristici impuls slab : IGM=1…3IGT la (-40°C); diG/dt >0,5A/µs; tr=1µs

Scheme de comandă pe poartă utilizate pentru amorsarea tiristorului
Clasificare
După forma curentului de comandă :
- comandă în curent continuu ;- comandă în impulsuri ;- comandă în curent alternativ.
După modul de cuplaj al etajului final :
- comandă cu cuplaj direct la poarta tiristorului ;- comandă cu izolare galvanică realizată cu transformatoare de impulsuri sau optocuploare.- comandă cu izolare galvanică realizată cu transformatoare de impulsuri sau optocuploare.
După modul de realizare :
- cu componente discrete ;- cu circuite integrate specializate.

iG
t
Monostabil
+_
+
_
TBR1 R
2
C iG
U1
IR
+iCI
R
iC
=IR
Ci
T
Schemă principială de comandă cu cuplaj direct a tiristorului
În intervalul de timp cât tranzistorul TB este blocat, condensatorul C se încarcă prin intermediul rezistenţei R1 la valoarea tensiunii U1. La intrarea în conducţie a tranzistorului, condensatorul C se descarcă în circuitul poartă-catod al tiristorului T, curentul de descărcare (iC)
determinând amorsarea acestuia. Rezistenţa R2 are rolul de limitare a curentului de comandă la o valoare admisibilă.

+
_
T
iG
U1
D1
TI* *
D2 R
G
R1
C1
iG
+ V1
V2
DT T
K
R1
R BE
RB
RC
iB
i C
Ta
a
+
a) b)
Comandă cu separare galvanică : a) cu transformator de impuls ; b) cu optocuplor
La intrarea în conducţie a tranzistorului Ta din a) datorită impulsului de comandă aplicat pe baza sa, primarul transformatorului de impuls TI este parcurs de un impuls de curent, care, transmis în secundar, este impulsul de amorsare pentru tiristor. Grupul R1C1 are rolul de a mări imunitatea la paraziţi a tiristorului. Rezistenţa R1 , care se alege cu valori în domeniul 0,2kΩ…5 kΩ, diminuează efectul curentului de deplasare care apare la joncţiunea J2 , evitându-se astfel o amorsare parazită, nedorită a tiristorului.

1 2 3 4 5 6 7
891011121314
4.7 nF+ 5 V
5K
CDB 4121
K START
+5 V
+ 5 V
1 N 4148
+ 5 V
200 Ω
1 N 4148820 Ω
**
BSX 45
+ 5 V
200 µ F K
G
PL6.8V
Ta
Ω
Schemă practică de comandă utilizând monostabilul 4121

uS
ωt
iG
ωt
iS
ωt
α 1
α1IS1
α1
iG
~ uS
RS i S
iωt
iS
ωt
IS2
α 2 Comanda
iG
Principiul controlului de fază
Modificând unghiul de comandă α al tiristorului, se variază valoarea medie a curentului de sarcină iS care parcurge sarcina RS, deci şi puterea activă consumată în ea. Schema electronică ce permite modificarea unghiului de comandă α se construieşte din elemente discrete sau în jurul unui circuit integrat specializat, ea putând fi cu sau fără separare galvanică

AB
PI R
UR
UPM
UABϕ
UCM
90
b)
RS
u S
~
A
B
P
M
M
R 1R
uC
C1
uR
uAB
~
a)
uPM
TTR
Comandă cu punte defazoare : a) schema electrică ; b) diagrama fazorială
La variaţia rezistnţei R, potenţialul punctului P se va deplasa pe semicercul de diametru AB,deci se va schimba defazajul între tensiunea uAM, (M este punctul median al secundaruluitransformatorului) sincronă cu uS şi tensiunea uPM, aplicată circuitului de comandă al tiristoruluiT. Acesta intră în conducţie atunci când tensiunea de comandă uPM depăşeşte tensiunea VGT ,specifică tiristorului. Acest moment este variabil, dacă defazajul ϕ, şi deci, momentul treceriiprin zero a lui uPM este variabil.
Comanda, relativ simplă, permite variaţia unghiului α în domeniul 10…170 grade electrice

Comanda şi controlul puterii active transmise sarcinii într-un circuit de c.a., cu ajutorul a 2 tiristoare montate antiparalel (echivalente unui triac) se poate face şi prin controlul numărului
de semialternanţe de conducţie din cadrul unui ciclu de funcţionare.Acest control se poate face principial în două moduri:
utilizând comanda prin zero cu referinţă constantă în timp ; utilizând comanda prin zero cu referinţă liniar variabilă în timp.
Etaj deadaptare Traductor
sarcinais
iG2C
omp
uS
~
Etaj
de
ieş ire
Sursatensiune
dereferinţ ă
u
Circuit deadaptare
uREF
T1
T2i
G1
usarc u ies
parator
sincr
Schema funcţională a comenzii cu controlul numărului semialternanţelor de conducţie.

Notatii:
usincr este tensiunea de sincronizare, în fază cu tensiunea de alimentare a sarcinii, uS ; usarc este o tensiune proporţională cu puterea disipată în sarcină ; uREF este o tensiune de referinţă generată de sursa de tensiune de referinţă ; uies este tensiunea de ieşire a comparatorului, care validează curenţii iG1 şi iG2 ; iG1 şi iG2 sunt curenţii de comandă ai tiristoarelor T1 şi T2 ; iS este curentul de sarcină.

u S
tusincr
t
t
t
uS usincr
u sarc
u REF
uREF usarc
i G1
i G2
tiS T1
T2
T1
T2 T2
T1
Forme de undă pentru comanda prin zero cu referinţă fixă

uS
tusincr
t
t
t
uS usincr
u sarcu REF
uREF
usarc
iG1
i G2
it
iS
Forme de undă pentru comanda prin zero cu referinţă liniar variabilă în timp

Pentru comanda tiristoarelor care funcţionează în cadrul redresoarelor comandate s-auconceput circuite integrate care lucrează pe principiul controlului de fază, iar pentru comandatiristoarelor şi triacelor din cadrul variatoarelor de tensiune alternativă, circuite integrate bazateatât pe principiul controlului de fază, cât şi pe principiul comenzii prin zero cu referinţă fixă saucu referinţă variabilă.
Exigenţele impuse comenzii sunt extrem de diferite, ele fiind funcţie atât de tipul convertoruluide putere, de tipul tiristorului utilizat, cât şi de caracteristicile circuitului de sarcină.
O creştere lentă a curentului de sarcină necesită impulsuri de aprindere lungi, până este atinscurentul de acroşare, în timp ce o creştere rapidă a curentului de sarcină cere impulsuri deaprindere cu pante şi supracreşteri importante (impulsuri tari).aprindere cu pante şi supracreşteri importante (impulsuri tari).
Circuitul de poartă trebuie dimensionat în acord cu caracteristicile de poartă ale tiristorului,rezultate din caracteristica statică curent-tensiune a porţii. În circuitul de poartă trebuie facutălimitarea curentului, încât chiar în cazul unui scurtcircuit să nu se depăşească valoarea maximăadimisibilă IGM.

2.4.2. Amorsarea accidentala a tiristorului
Amorsarea accidentală se produce în absenţa unui semnal pe poarta tiristorului şi este un fenomen nedorit, considerat o defecţiune în funcţionarea convertoarelor statice. Asemenea amorsări sunt de trei tipuri :
Amorsarea prin autoaprindere se produce în absenţa curentului IG, la depăşireatensiunii de autoaprindere VB0. Acest tip de amorsare este utilizat numai pentru diodele Shockley(structuri pnpn fără electrod de comandă ). La structurile pnpn cu electrod de comandă(tiristoare), această amorsare este nedorită.
În ecuaţia tiristorului, dacă IG=0, rezultă
0CBIMI
⋅=
)αα(10
np
CBT
MI
+⋅−=
unde M este factorul de multiplicare în avalanşă a purtătorilor de sarcină la joncţiunea J2, atunci când este depăşită tensiunea VB0. Această tensiune este mai mică decât tensiunea la care s-ar fi străpuns joncţiunea J2 dacă ar fi fost izolată (neinclusă în structura pnpn). La tensiunea de autoaprindere VB0 , numitorul fracţiei din se anulează şi :
np
Mαα
1+
=
Actualmente tiristoarele pentru tensiuni mari conţin încorporate sisteme interne de protecţie contra autoaprinderii, deoarece acest fenomen poate duce la distrugerea convertorului static în care funcţionează tiristorul

Dispozitivele semiconductoare care utilizează amorsarea prin autoaprindere, deci structurilepnpn fără electrod de comandă (diode Shockley) se folosesc numai în scheme simple, sau pentruprotecţia tiristoarelor. Firma Brown Bovery foloseşte asemenea diode (numite de ei BOD -Break Over Diode) într-o schemă de protecţie împotriva autoaprinderii tiristoarelor.
R1
TR
CR2C2
DAC D
BOD
a) b)
+
a) b)
a) Utilizarea diodei Shockley (BOD) pentru evitarea autoaprinderii;
b) b) Modul de protecţie la supratensiuni cu BOD , cu VB0=2000V
Supratensiunea care apare la bornele tiristorului, determină intrarea în conducţie a diodei BOD şi, prin intermediul ei, aplicarea unui semnal de comandă (limitat de R1) pe poarta tiristorului, care intră astfel în conducţie în mod normal.
Dioda BOD se alege cu VB0=VDRM-100V şi ITAV>IGT, unde VB0 şi IGT sunt parametrii tiristorului protejat. Diodele BOD nu suportă tensiuni inverse mai mari de 10V şi de aceea se montează în serie cu diode de comutaţie (D), care preiau tensiunea inversă.

Amorsarea prin efectul dvT/dt se produce în absenţa curentului de comandă pe poartă, laaplicarea tensiunii directe, cu pantă foarte mare, la bornele unui tiristor blocat în direct.
pnpA
E 2
T2
+ -K 1R C
E 1
B 2 C2
B1C1
T1 p nn
I T
K
G I GK
UP
=IE2I T
IE1
U
A
K
I T
T2
T1
i dIB1
I G
IE1
IC2
I B2
IC1
VT
=I E2
X
Y VG
a)
G I GK 2
+ -
UCRG GC b
I G
b)
La inversarea tensiunii la bornele unui tiristor blocat în invers joncţiunile J1 şi J3 sunt polarizatedirect, iar joncţiunea J2 este polarizată invers. Viteza de expansiune în straturile slab dopate p şin a zonei de sarcină spaţială a joncţiunii J2, deci şi a capacităţii de barieră a acestei joncţiuni(notată Cb) este dependentă direct proporţional de panta de creştere a tensiunii aplicate.Extinderea zonei de sarcină spaţială însemnă o variaţie a sarcinii electrice şi deci apariţia unuicurent de deplasare.

t
Cv
t
vCi b
TT
bd d
d
d
d+=
Practic se neglijează variaţia capacităţii de barieră cu timpul şi se foloseşte o valoare medie acurentului şi capacităţii :
t
vC
t
vCI T
bfT
bd d
d2
d
d⋅==
unde s-a considerat valoarea medie a capacităţii de barieră egală cu dublul capacităţii Cbf
corespunzătoare valorii finale a tensiunii directe anod-catod (tensiunea de blocare în direct).Această capacitate se poate calcula funcţie de caracteristicile de material ale cristalului de siliciu(ε), gradul de dopare al stratului slab dopat n al tiristorului, de tensiunea aplicată şi de sarcina(ε), gradul de dopare al stratului slab dopat n al tiristorului, de tensiunea aplicată şi de sarcinaacumulată. Densitatea acestui curent este mult mai mare decât curentul rezidual al unui tiristorblocat în direct şi valoarea lui este proporţională cu aria structurii semiconductoare. Curentul dedeplasare determină creşterea factorilor de amplificare în curent αn şi αp (Fig.3.5), până laîndeplinirea condiţiei de amorsare:
0)αα(1 =+− np
În concluzie, efectul dvT/dt constă în amorsarea tiristorului în absenţa curentului de comandă şi la o tensiune mult inferioară lui VB0, atunci când panta tensiunii directe aplicate unui tiristor blocat în direct depaseste (dv /dt)crit. Acesta este un parametru important al tiristorului şi este indicat în fila de catalog. Pentru a evita amorsare prin efect dvT /dt se iau măuri de protecţie externe (o anumită configuraţie a circuitului) sau interne, privind structura semiconductoare

Amorsarea prin creşterea temperaturii se produce tot în absenţa semnalului de comandă pepoartă (IG=0). Se produce atunci când condiţia de anulare a numitorului fracţiei din ecuatiatiristorului este îndeplinită datorită creşterii temperaturii de lucru.
Curentul printr-o joncţiune polarizată invers depinde de agitaţia termică şi creşte exponenţialcu creşterea temperaturii. Acelaşi lucru se întâmplă şi cu curentul ICB0 :
2)(0
aTTba
CBCB0 eII−
⋅=
unde : b este un factor de proporţionalitate ; Ta este temperatura ambiantă ; Ia
CB0 este curentul rezidual de colector cu baza în gol la temperatura ambiantă ; I CB0 este curentul rezidual de colector cu baza în gol la temperatura ambiantă ; ICB0 este acelaşi curent la temperatura T> Ta
Din ecuatia tiristorului, când baza este în gol, adică IG=0 , rezultă
)(10
np
CBT
αα
II
+−=

Creşterea lui ICB0 implică o creştere a lui IT şi, prin urmare, o creştere a factorilor αn şi αp
Practic ICB0 se dublează la fiecare 8°C de creştere a temperaturii structurii semiconductoare. Latemperaturi de 125°C, densitatea curentului rezidual ajunge de ordinul mA/cm2 [1].
Amorsarea parazită are loc la valori ale curentului IT ≅ 0,1A. O asemenea amorsare este
facilitată de aplicarea unei tensiuni de blocare mari, precum şi de valori caracteristice mici
pentru curenţii IGT, IL şi IH .

2.5. Puterea activa disipata in tiristor
Puterea activă totală disipată în tiristor se poate calcula cu relaţia :
GRDRQTTT PPPPPPP +++++=
unde : PT reprezintă pierderile de putere activă în conducţie, în direct ; PTT reprezintă pierderile de putere activă în procesul de amorsare ; PRQ reprezintă pierderile de putere activă în procesul de blocare ; PD reprezintă pierderile de putere activă în starea de blocare în direct; PR reprezintă pierderile de putere activă în starea de blocare în invers; PG reprezintă pierderile de putere activă în circuitul de comandă al tiristorului. PG reprezintă pierderile de putere activă în circuitul de comandă al tiristorului.
Funcţie de frecvenţa cu care tiristorul funcţionează în cadrul convertorului static, unele saualtele dintre aceste componente ale pierderilor devin mai mari sau mai mici. Pierderile înconducţie rămân însă mereu cele mai importante.

2.5.1. Pierderile de putere activa in conductie
Când funcţionează la frecvenţă industrială, pierderile cele mai importante se produc înconducţie. Se notează cu PTAV , valoarea medie a puterii active disipate în conducţie pe operioadă T a ciclului de funcţionare:
⇒== ∫∫T
TT
T
TTAV tivT
tpT
P00
d1
d1
( )TAVfTTTAVTRMSTTAVTTAV
IkrVIIrIVP2
02
0 +=+=
unde :este valoarea medie a curentului direct ;∫ =
T
Iti d1
este valoarea medie a curentului direct ;
este valoarea efectivă a curentului direct ;
este factorul de formă al curentului direct.
∫ =TAVF
ItiT
0
d1
TRMS
T
FIti
T=∫
0
2 d1
TAV
TRMS
fI
Ik =
Pierderile în conducţie depind atât de caracteristicile tiristorului (prin VT0 şi rT) date de catalog, deconsumator (prin mărimea curentului absorbit), cât şi de schema convertorului (prin forma deundă a curentului).

2.5.2. Pierderile de putere activa la amorsare
Pierderile de putere activă la amorsare devin importante şi trebuie luate în consideraţie la frecvenţe mari de comutaţie.
t
i GIGM
diG
dt
i T
t r
TTp
TTP
I
TidiTdt
1t
Tv
GiG
TiA K+ -
t fr
di T
dt
comanda
0,9I
0,1I
GM
GM
t
dvT
dt
VD
t 4
t 3VTM
dvR
dt
RV
RM t0
DVT
v
TI
0,25IRRM
0,9II
sptgrgdtgtt
fr
I D
t
t s t f
trr
t 2
Qs
Q f
di T
dt rec
t q
IR
0,9V
0,1V
t
V
Conducţ ie
Neco
mandat
RRM
RRM
D
D
Comutaţ ie
Amorsare Comutaţ ie
Blocare
Blocat îninvers
Blocat îndirect
∆

∫=
gtt
TT
gt
TTtiv
tP
0
d1
Pentru tiristoarele rapide sunt date în catalog două diagrame, care permit evaluarea simplă a sumei pierderilor la amorsare şi în conducţie, PT+PTT (PT reprezintă pierderile de putere activă în conducţie, în direct, v. 2.4)
diagrama PAC pentru determinarea pierderilor de Putere la Amorsare şi în Conducţie.Diagrama este valabilă pentru orice formă de curent care străbate tiristorul şi reprezintă, încoordonate logaritmice, dependenţa de timp a curentului prin tiristor, având suma P +P cacoordonate logaritmice, dependenţa de timp a curentului prin tiristor, având suma PT+PTT caparametru.
diagrama ETS pentru determinarea Energiei Totale disipate pentru un impuls Sinusoidalde curent. Diagrama se foloseşte numai pentru curent sub formă de semiundă sinusoidală şireprezintă, în coordonate logaritmice, dependenţa valorii de vârf a semiundei, ITM, de durata tp aacesteia, având ca parametru energia totală disipată, Wtot . Se calculează apoi puterea, cu :
fWt
WPPP tot
p
totTTTtot ⋅==+= 2
unde f este frecvenţa de funcţionare a tiristorului

20
4060
100
200
400600
1000
2000
40006000
1000015000
60kW
40kW
600W
iT [A]
PTT PT+ =200kW
t[ s]µ
1 2 4 6 10 20 40 60 100 200 400 600 10001020 t[ s]µ
Diagrama PAC privind determinarea pierderilor PT+PTT pentru tiristorul T600F

468
10
2
468
10
3
4
ITM[A]
2
20Ws40Ws
0,02
0,040,060,10,20,40,6
124
6Wtot=10Ws
tp
ITM
0,01 0,04 0,06 0,1 0,2 0,4 0,6 1 2 4 6 1010 2
t [ ms]p
20,01
Diagrama ETS privind determinarea energiei totale disipate pentru tiristorul T600F

Calculele efectuate sunt corecte dacă este îndeplinită condiţia
( ) ispgr ttt <+⋅6,0
unde ti este durata impulsului de curent care străbate tiristorul.
Dacă nu este îndeplinită aceasta condiţie, pentru convertorul static de putere respectiv este recomandabil să se aleagă un tiristor mai rapideste recomandabil să se aleagă un tiristor mai rapid

2.5.3. Pierderile de putere activă la blocare
Pierderile la blocare au valori semnificative (valori de vârf de câţiva kW) doar pe durata timpului de cădere tf al curentului invers, când, atât curentul invers, cât şi tensiunea inversă au valori mari. La frecvenţe mari de comutaţie, aceste pierderi trebuie luate în considerare.
Calculul precis se poate face cu relaţia:
∫=
ft
RR
f
RQtiv
tP
0
d1
Determinarea exactă a pierderilor la blocare prin măsurarea curentului şi tensiunii este Determinarea exactă a pierderilor la blocare prin măsurarea curentului şi tensiunii este complicată atât din punctul de vedere al măsurătorilor, cât şi al calculaţiei. În majoritatea aplicaţiilor este suficient un calcul simplificat, realizat prin linearizarea variaţiei curentului şi tensiunii inverse.
Pierderile de putere la blocare apar uniform distribuite pe întreaga suprafaţă a structurii desiliciu. Totuşi, ele nu pot fi lăsate să ia valori oricât de mari, pentru că, datorită neomogenităţilorinerente în structura plachetei de siliciu, pot apare puncte calde, care, la frecvenţe de comutaţieridicate şi solicitare la tensiune inversă mare, determină distrugerea tiristorului. Prin urmare serecomandă să se calculeze energia care trebuie disipată la blocare :

fRQRQtPW ⋅=
Această energie trebuie să rămână mai mică decât valorile limită recomandate de fabricanţii de tiristoare.
În caz contrar, trebuie luate măsuri de reducere:
- a supratensiunii inverse de comutaţie VRM şi a pantei tensiunii dvR /dt, prin intermediul circuitelor de protecţie la supratensiuni;
- a curentului invers maxim I , prin alegerea unui tiristor cu o sarcină stocată mai - a curentului invers maxim IRRM, prin alegerea unui tiristor cu o sarcină stocată mai mică, sau montarea unei bobine de reactanţă saturabilă, în serie cu tiristorul

2.5.4. Pierderile de putere activă în stare blocată
RECAPITULARE:
Tiristorul poate fi blocat la polarizare directă sau inversă. El este străbătut de curenţi reziduali(ID , respectiv IR) foarte mici, a căror valoare depinde de tensiunea aplicată tiristorului, deexistenţa semnalului de comandă pe poartă şi de temperatura joncţiunii. În catalog sunt datevalorile maxime ale acestor curenţi (IDM , respectiv IRM).
Dacă tensiunile aplicate pe tiristor sunt mari şi frecvenţele de comutaţie ridicate, pierderile deputere activă în stare blocată nu mai pot fi neglijate şi ele trebuie adunate la calculul puterii totaleputere activă în stare blocată nu mai pot fi neglijate şi ele trebuie adunate la calculul puterii totaledisipate în tiristor.

Calcul acoperitor pentru cele două puteri disipate în stare blocată :
la polarizare inversă :
RAVRM
T
RRM
T
RRRVItv
TItiv
TP ⋅=⋅== ∫∫
00
d1
d1
unde VRAV este valoarea medie a tensiunii inverse blocate
la polarizare directă :
TT
DAVDM
T
DDM
T
DDDVItv
TItiv
TP ⋅=⋅== ∫∫
00
d1
d1
unde VDAV este valoarea medie a tensiunii directe blocate

2.5.5. Pierderile de putere activă în circuitul de comandă
Puterea disipată în circuitul de comandă (al porţii) este nesemnificativă comparativ cu celelaltecomponente ale puterii active totale.
O valoare uzuală pentru tiristoarele normale de putere este PG=5W.
În afară de această putere medie se poate defini şi o valoare de vârf a puterii disipate încircuitul de comandă, egală cu produsul dintre valorile de vârf ale curentului şi tensiunii decomandă.

2.6. Regimul termic al tiristorului
Incălzirea tiristorului este condiţionată de pierderile în structura semiconductoare şi de posibilităţile de evacuare sau înmagazinare ale căldurii
Având în vedere că tiristoarele, analog diodelor, se montează în capsule cu răcire unilaterală sau bilaterală, schema lor termică echivalentă este similară cu cea a diodelor, atât pentru regimul termic stabilizat, cât şi pentru cel tranzitoriu. Prin urmare, calculul regimului termic al tiristorului se face în mod asemănător cu calculul termic al diodei (Curs 2 !)

2.7. Date principale de catalog ale tiristoarelor
A. Valori electrice limită şi valori caracteristice care definesc comportarea în conducţie
A1. Curentul mediu maxim în stare de conducţie ITAVM
- valoarea medie a celui mai mare curent, de forma unui puls semi-sinusoidal, cu durata de 10 ms (unghi de conducţie de 180° electrice), care în regim permanent determină o încălzire admisă şi bine determinată a capsulei (TC=85°C), în condiţii de răcire specificate.
ITAVM se mai numeşte şi curent nominal al tiristorului,pentru că, de obicei, un tiristoreste indicat prin intermediul lui. De exemplu tiristorul T455N are ITAVM=455A (TC=85°C) , iareste indicat prin intermediul lui. De exemplu tiristorul T455N are ITAVM=455A (TC=85°C) , iarT600F are ITAVM=600A (TC=85°C) . Litera N indică un tiristor normal, iar F un tiristor rapid. Încatalog sunt date diagrame TC=f( ITAVM ) , pentru diverse forme de curent care străbat tiristorul şipentru diverse condiţii de răcire.

A2. Curentul eficace în stare de conducţie ITRMSM
- valoarea efectivă maximă admisibilă a curentului de conducţie, independentă de forma curentului şi de condiţiile de răcire.
TAVMfTRMSM IkI ⋅= unde kf este factorul de formă al curentului care străbate tiristorul
A3. Tensiunea de prag VT0
A4. Rezistenţa dinamică rT
A5. Tensiunea în stare de conducţie VTMA5. Tensiunea în stare de conducţie VTM
- căderea de tensiune maximă pe tiristor, măsurată în condiţii bine stabilite (străbătut de un curent direct IT, joncţiunea având temperatura TvJ determinată)
A6. Curentul de menţinere IH
- reprezintă cea mai mică valoare a curentului anodic al tiristorului, la care acesta mai rămâne în conducţie, fără să aibă semnal pe poartă, temperatura joncţiunii fiind precizată (de obicei TvJ =125°C).
A7. Curentul de acroşare IL
- reprezintă cea mai mică valoare a curentului anodic al tiristorului, la care acesta intră în conducţie, temperatura joncţiunii şi caracteristicile generatorului de comandă fiind bine precizate.

B. Valori limită electrice pentru regimuri repetitive
B1. Valoarea de vârf a curentul de conducţie repetitiv ITRM
- reprezinta valoarea de vârf maximă admisibilă a curentului de conducţie, în decursul unei perioade, valabilă şi pentru o variaţie nesinusoidală.
Aceasta valoare nu trebuie depăşită nici chiar pentru durate scurte şi cea mai bună răcire.La încărcarea tiristorului cu ITRM nu trebuie depăşită valoarea ITRMSM a curentului.
B2. Tensiunea directă repetitivă maximă VDRM
- reprezintă valoarea instantanee maximă admisibilă a unei tensiuni periodice, care se aplicăîn direct pe tiristorul blocat (v. caracteristica statica);
B3. Tensiunea inversă repetitivă maximă VRRM
- reprezintă valoarea instantanee maximă admisibilă a unei tensiuni periodice, care se aplică în invers pe tiristorul blocat

B4. Viteza critică de creştere a curentului la intrarea în conducţie (di/dt)crit
- reprezintă valoarea maximă a pantei de creştere a curentului la amorsare, încât pierderile care apar în tiristor să nu determine creşterea temperaturii joncţiunii peste valoarea maximă admisibilă.
Această valoare se referă la regimul normal de funcţionare al tiristorului şi poatre fi suportată de un număr nelimitat de ori. Ea este prezentată în catalog pentru condiţii de sarcină şi de comandă bine precizate.
Valoarea vitezei critice de creştere a curentului în stare de conducţie pentru acelaşi tiristor are valori diferite în funcţie de norma după care a fost determinată : DIN, CEI, JDEC.
B5. Sarcina stocată QsB5. Sarcina stocată Qs
B6. Viteza critică de creştere a tensiunii la blocare (dv/dt)crit ,- reprezintă valoarea maximă a pantei de creştere a tensiunii directe pe tiristorul blocat,
în absenţa comenzii pe poartă, care nu determină, pentru tot intervalul temperaturilor defuncţionare ale tiristorului, amorsarea lui parazită.

B7. Curentul de suprasarcină previzibilă IT(OV)
Curentul de suprasarcină maxim IT(OV)M
- sunt date sub formă de diagrame funcţie de timp şi curentul mediu de preîncărcare a tiristorului
B8. Curentul de suprasarcină previzibilă IT(OV) ca şi curentul de suprasarcină maxim IT(OV)M
- sunt date sub formă de diagrame funcţie de timp şi curentul mediu de preîncărcare atiristorului IFAV(PRE);tiristorului IFAV(PRE);

C. Valori limită electrice pentru regimuri accidentale
C1. Curentul de suprasarcină accidentală în stare de conducţie ITSM şi integrala Joule sau
integrala de curent I2t . - definiţiile date pentru parametrii similari ai diodei (IFSM şi I2t), ca şi consideraţiile
asupra lor, rămân valabile şi pentru tiristor;
C2. Tensiunea directă accidentală maximă (valoare de vârf) VDSM
- reprezintă valoarea instantanee maximă a tensiunii directe care se poate aplica accidental (neperiodic) tiristorului blocat, fără ca acesta să amorseze. Dacă nu este specificată, se consideră egală cu VDRM
C3. Tensiunea inversă accidentală maximă (valoare de vârf) VRSM
- reprezintă valoarea instantanee maximă a tensiunii inverse care se poate aplica accidental (neperiodic) tiristorului blocat, fără ca acesta să amorseze. Dacă nu este specificată, se consideră egală cu VRRM

D. Valori caracteristice stării de blocare în direct şi în invers
D1. Curentul direct maxim în stare blocată IDM
- este curentul care trece prin tiristorul blocat în direct, atunci când la bornele lui este aplicată otensiune VD = VDRM , temperatura joncţiunii fiind precizată, de obicei TvJ =125°C;
D2. Curentul invers maxim în stare blocată IRM
- este curentul care trece prin tiristorul blocat în invers, atunci când la bornele lui este aplicatăo tensiune VR = VRRM , temperatura joncţiunii fiind precizată, de obicei TvJ =125°C.

E. Valori caracteristice circuitului de poartă
E1. Curentul de amorsare pe poartă IGT
E2. Tensiunea de amorsare pe poartă VGT
E3. Curentul de neamorsare pe poartă IGD
E4. Tensiunea de neamorsare pe poartă VGD
E5. Timpul de întârziere la amorsare prin poartă tgd
E6. Timpul de blocare (de dezamorsare prin comutarea circuitului) la amorsare prin poartă tq
F. Caracteristici termice
F1. Temperaturi maxime : temperatura virtuală a joncţiunii TvJ , temperatura carcasei TC=f(ITAV)
şi temperatura de stocare Tstg ;
F2. Rezistenţe termice : joncţiune-capsulă în curent continuu RthJC DC, capsulă-radiator RthCK şicorecţia funcţie de unghiul de conducţie ∆r=f(θ);
F3. Impedanţa termică ZthJC DC ;