
CONTROLUL PREDICTIV ÎN REłEA AL PROCESELOR RAPIDE · prin lant¸uri Markov, sistemele ˆın bucl...
63
UNIUNEA EUROPEANĂ GUVERNUL ROMÂNIEI MINISTERUL MUNCII, FAMILIEI ŞI PROTECłIEI SOCIALE AMPOSDRU Fondul Social European POSDRU 2007-2013 Instrumente Structurale 2007-2013 OIPOSDRU UNIVERSITATEA TEHNICĂ “GHEORGHE ASACHI” DIN IAŞI UNIVERSITATEA TEHNICĂ “GHEORGHE ASACHI” DIN IAŞI Şcoala Doctorală a FacultăŃii de Automatică şi Calculatoare CONTROLUL PREDICTIV ÎN REłEA AL PROCESELOR RAPIDE - REZUMAT AL TEZEI DE DOCTORAT - Conducător de doctorat: Prof. univ. dr. ing. Corneliu Lazăr Doctorand: Ing. Constantin Florin Căruntu IAŞI - 2011
Transcript of CONTROLUL PREDICTIV ÎN REłEA AL PROCESELOR RAPIDE · prin lant¸uri Markov, sistemele ˆın bucl...
UNIUNEA EUROPEANĂ GUVERNUL ROMÂNIEI
MINISTERUL MUNCII, FAMILIEI ŞI PROTECłIEI SOCIALE
AMPOSDRU
Fondul Social European POSDRU 2007-2013
Instrumente Structurale 2007-2013
OIPOSDRU UNIVERSITATEA TEHNICĂ “GHEORGHE ASACHI”
DIN IAŞI
UNIVERSITATEA TEHNICĂ
“GHEORGHE ASACHI” DIN IAŞI Şcoala Doctorală a FacultăŃii de Automatică şi Calculatoare
CONTROLUL PREDICTIV ÎN REłEA AL PROCESELOR RAPIDE
- REZUMAT AL TEZEI DE DOCTORAT -
Conducător de doctorat:
Prof. univ. dr. ing. Corneliu Lazăr
Doctorand:
Ing. Constantin Florin Căruntu
IAŞI - 2011


Cuprins
Cuprins iii
1 Introducere 11.1 Sisteme de control ın retea . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Lista publicatiilor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2 Sisteme de control ın retea 72.1 Intarzieri variabile ın timp . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.2 Sisteme de control ın retea din autovehicule . . . . . . . . . . . . . . . . . . . . . . 10
3 Control predictiv liniar ın retea 133.1 Modelarea partii fixate incluzand ıntarzierile . . . . . . . . . . . . . . . . . . . . . . 14
3.1.1 Metoda mediei . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.1.2 Metoda identificarii . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.1.3 Metoda de adaptare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.2 Proiectarea regulatorului predictiv liniar ın retea . . . . . . . . . . . . . . . . . . . . 16
3.2.1 Modelul predictorului . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.2.2 Metoda λ-scheduling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3.3 Control predictiv liniar ın retea pentru procesele rapide din sistemele auto . . . . . . 19
3.4 Rezultate experimentale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
4 Control predictiv neliniar ın retea 254.1 Modelarea ıntarzierilor ca incluziuni politopice . . . . . . . . . . . . . . . . . . . . 26
4.2 Regulator predictiv bazat pe functii Lyapunov . . . . . . . . . . . . . . . . . . . . . 27
4.3 Rezultate de simulare si experimentale . . . . . . . . . . . . . . . . . . . . . . . . . 29
iv CUPRINS5 Control predictiv robust neliniar ın retea 33
5.1 Modelarea ıntarzierilor de intrare ca perturbatii . . . . . . . . . . . . . . . . . . . . 345.2 Modelarea ıntarzierilor de intrare si de iesire ca perturbatii . . . . . . . . . . . . . . 35
5.2.1 Intarzieri pe calea directa . . . . . . . . . . . . . . . . . . . . . . . . . . . . 355.2.2 Intarzieri pe calea de reactie . . . . . . . . . . . . . . . . . . . . . . . . . . 35
5.3 Regulator predictiv robust bazat pe functii Lyapunov . . . . . . . . . . . . . . . . . 365.4 Controlul lantului de transmisie a puterii ce include ambreiaj prin CAN . . . . . . . 39
6 Concluzii 416.1 Contributii . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
6.1.1 Modelarea ıntarzierilor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 426.1.2 Control predicitv liniar ın retea . . . . . . . . . . . . . . . . . . . . . . . . . 426.1.3 Control predicitv neliniar si control predictiv neliniar robust ın retea . . . . . 436.1.4 Aplicatii de control ın retea din domeniul autovehiculelor . . . . . . . . . . . 44
6.2 Directii viitoare de cercetare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
References 49

Capitolul 1
Introducere
1.1 Sisteme de control ın retea
Sistemele de reglare a caror bucla este ınchisa prin intermediul unei retele de comunicatii, deumite,de asemenea, si sisteme de control ın retea (SCR), sunt ın momentul actual foarte utilizate ın diferiteramuri din industrie, de la fabrici automatizate pana la aplicatii din domeniile auto si aerospatial.Aceasta evolutie remarcabila de la sisteme de control individuale la sisteme integrate de control ınretea a adus multe avantaje care includ: costul scazut, simplitatea instalarii si a mentenantei, agili-tatea sporita a sistemului, dar si cresterea fiabilitatii si a flexibilitatii [Johansson et al., 2005, Jian-gang et al., 2007], dar utilizarea retelelor de comunicatii presupune necesitatea combaterii efectelorimperfectiunilor si restrictiilor introduse de retea: ıntarzieri variabile ın timp, pierderi de pachete dedate, perioade de esantionare variabile [Tipsuwan and Chow, 2003].
Intarzierile pot fi necunoscute si variabile ın timp si pot degrada performantele sistemelor dereglare proiectate fara a le considera si, mai mult, pot destabiliza sistemul de reglare ın bucla ınchisa[Jiangang et al., 2007]. Metodele existente de compensare a ıntarzierilor fixe nu sunt potrivite pen-tru controlul unor sisteme ın retea din moment ce ıntarzierile sunt variabile ın timp. In consecinta,pentru a putea compensa ıntarzierile variabile din retea ıntr-un sistem de reglare ın bucla ınchisa suntnecesare metode de control avansate [Tipsuwan and Chow, 2003].
In majoritatea cazurilor, introducerea unei retele de comunicatii nu afecteaza ın mod semni-ficativ performantele sistemului de control [Vatanski et al., 2007]. Totusi, pentru anumite partifixate care au restrictii de timp (restrictii care apar din cauza dinamicii procesului fizic), imple-mentarea unui sistem de control ın retea trebuie realizata luand ın considerare implicatiile unei retelede comunicatii. Pentru asemenea sisteme, introducerea unei retele de comunicatii ın bucla de reglare
2 Introducere
introduce o ıntarziere suplimentara, fie constanta, fie variabila ın timp, care face ca analiza sistemuluisi proiectarea regulatorului sa devina de o complexitate mai mare. O alta urmare cauzata de uti-lizarea unei retele de comunicatii este reprezentata de posibilitatea pierderii pachetelor de date caretrebuie luata ın considerare atunci cand se proiecteaza sistemul de control. Aceste doua problemepot afecta performantele globale ale retelei si chiar destabiliza sistemul de control ın bucla ınchisa[Halevi and Ray, 1990,Zhang et al., 2001,Chow and Tipsuwan, 2001,Juanole and Mouney, 2005,Jian-gang et al., 2007, Gupta and Chow, 2008].
Exista numeroase imperfectiuni si restrictii introduse de retelele de comunicatii ce sunt ımpartiteın cinci categorii ın [Heemels et al., 2010], dar, de obicei, ın literatura de specialitate se consideradoar unele dintre acestea ın analiza SCR: (i) erori de cuantizare, (ii) pierderi de pachete de date, (iii)perioade de esantionare si de transmisie variable, (iv) ıntarzieri variabile ın timp ce pot fi mai micisau mai mari decat perioada de esantionare, (v) restrictii cauzate de utilizarea ın comun a retelei decomunicatii. Mai mult, o analiza a diferitelor aspecte ale limitarilor impuse de utilizarea canalelor decomunicatii pentru conectarea elementelor componente ale unui SCR este realizata ın [Hespanha et
al., 2007].
Exista numeroase studii de cercetare care trateaza diverse strategii de control predictiv pentrusisteme de control ın retea. Dintre acestea, o strategie de control predictiv adaptiv este descrisaın [Wang et al., 2010]. In [Onat et al., 2008], un model al partii fixate este pastrat ın interiorulregulatorului, care este folosit pentru a prezice starile partii fixate ın viitor pentru a genera marimide control corespunzatoare. In plus, un automat de stare finit este utilizat ın elementul de executiepentru a selecta iesirea corespunzatoare pentru a reduce diferenta dintre starile actuale ale partii fixatesi cele prezise de model. In [Li et al., 2008a], doua regulatoare predictive sunt proiectate si unestimator de stare este utilizat atunci cand vectorul de stare complet nu este disponibil. Un regulatorpredictiv bazat pe functii de control Lyapunov este propus ın [de la Pena and Cristofides, 2008] pentrusisteme neliniare incerte, care ia pierderile de date ın mod explicit ın considerare, atat ın problema deoptimizare, cat si ın implementarea regulatorului.
Controlul predictiv (CP) este vazut din ce ın ce mai mult ca o metodologie atractiva pentru acontrola procesele rapide din aplicatiile auto, datorita capacitatii sale de a gestiona, ın mod direct,diferite specificatii si de a include optimizarea unei functii de cost, ın timp ce se impun restrictii asupravariabilelor de stare si de control. Aceasta se potriveste problemelor luate ın considerare ın aceastateza, si anume, controlul diferitor subsisteme din domeniul autovehiculelor, care au dinamica rapida,printr-o retea de comunicatii, de exemplu, Controller Area Network (CAN). Cu toate acestea, datoritacomplexitatii modelelor si limitarilor stricte de timp pentru a gasi o solutie on-line, abordarile de CP
Lista publicatiilor 3
standard (cu un orizont de predictie suficient de mare) [Maciejowski, 2002] nu reprezinta o solutieviabila, conducand la solutii care sunt prea complexe si, ın acelasi timp, prea conservative pentru a fiimplementate ın aplicatiile de control ın timp real, avand ın vedere faptul ca partile fixate din industriaauto au dinamica rapida, necesitand perioade de esantionare mici.
Intarzierile introduse de reteaua de comunicatii sunt variabile ın timp, imprevizibile si pot deteri-ora performantele sistemului de control ın bucla ınchisa si pot chiar sa reduca regiunea de stabilitatea sistemului [Jiangang et al., 2007]. In [Wu et al., 2009] ıntarzierile introduse de retea sunt modelateprin lanturi Markov, sistemele ın bucla ınchisa rezultand de forma unor sisteme liniare cu doua mod-uri de functionare. Intarzierile variabile ın timp, dar marginite, sunt modelate ca procese aleatoaredescrise de functii de densitate a probabilitatilor continue ın [Bernardini et al., 2010]. In [Yue et
al., 2009] se considera ca distributia probabilitatilor ıntarzierilor este cunoscuta a priori. Sistemul decontrol ın retea este descris folosind forma canonica Jordan ın [Salehi et al., 2008, Cloosterman et
al., 2009, Bernardini et al., 2010, Cloosterman et al., 2010] sau pe baza teoremei Cayley-Hamiltonın [Gielen and M.Lazar, 2009a, Gielen et al., 2010]. O alta abordare recenta este sa se ia ın con-siderare ıntarzierea introdusa de reteaua de comunicatii ca fiind o perturbatie si sa se utilizeze unobservator la fel ca ın [Natori et al., 2008, Gadamsetty et al., 2009], care observa starea retelei siefectul ıntarzierilor variabile ın timp este compensat de algoritmul de control.
Pe parcursul ultimilor ani, problema compensarii ıntarzierilor variabile ın timp introduse de SCRa fost intens studiata si numeroase strategii de control au fost raportate ın literatura de specialitate:regulator cu ıntarzieri multiple bazat pe predictorul Smith pentru sistemele cu ıntarzieri variabile,dar marginite [Ibeas et al., 2007], strategie robusta de control care ia ın considerare ın proiectarearegulatorului limita superioara a ıntarzierilor care pot sa apara ın reteaua de comunicatii [Vatanski et
al., 2007], predictor Smith dinamic combinat cu regulator fuzzy PID [Du and Qian, 2008], regula-tor cu predictor Smith, care include o bucla de adaptare pentru a reduce influenta ıntarzierilor asupraperformantlor de control [Velagic, 2008] si chiar control predictiv bazat pe model [Gielen and M.Lazar, 2009b].
1.2 Lista publicatiilor
Aceasta teza de doctorat se bazeaza, ın mare parte, pe articole publicate sau trimise spre publicare.Rezultatele obtinute pe parcursul celor trei ani de studii doctorale au fost publicate ın:
• 2 lucrari publicate ın jurnale cotate ISI cu factor de impact (MSSP - 1.762, IET CT& A - 1.283),din care una ın curs de aparitie;
4 Introducere
• 1 lucrare publicata ıntr-un jurnal indexat ISI (CEAI) ın curs de aparitie;
• 3 lucrari publicate ın volume ale conferintelor internationale indexate ISI Proceedings;
• 2 lucrari indexate SCOPUS;
• 1 lucrare indexata INSPEC;
• 1 lucrare indexata ZBMATH;
• 4 lucrari publicate ın volume ale conferintelor internationale IEEE;
• 2 lucrari publicate ın volume ale conferintelor internationale IFAC;
• 4 lucrari publicate ın volume ale altor conferintelor internationale;
• 1 lucrare trimisa la un jurnal (IEEE TII).
Capitolul 3 contine rezultate prezentate ın:
• [Caruntu and Lazar, 2009a]: C. F. Caruntu and C. Lazar. Network-Induced Variable Time Delay Com-
pensation Technique Based on Predictive Control. In 17th International Conference on Control Systems
and Computer Science, pages 65–71, 2009.
• [Patrascu et al., 2009]: D. I. Patrascu, A. E. Balau, C. F. Caruntu, C. Lazar, M. H. Matcovschi and
O. Pastravanu. Modelling of a Solenoid Valve Actuator for Automotive Control Systems. In 17th Interna-
tional Conference on Control Systems and Computer Science, pages 541–546, 2009.
• [Balau, Caruntu et al., 2009b]: A. E. Balau, C. F. Caruntu, D. I. Patrascu, C. Lazar, M. H. Matcovschi
and O. Pastravanu. Modeling of a Pressure Reducing Valve Actuator for Automotive Applications. In
18th IEEE International Conference on Control Applications, Part of 2009 IEEE Multi-conference on
Systems and Control, Saint Petersburg, Russia, 2009. (indexata ISI Proceedings)
• [Caruntu et al., 2009c]: C. F. Caruntu, M. H. Matcovschi, A. E. Balau, D. I. Patrascu, C. Lazar and
O. Pastravanu. Modeling of an Electromagnetic Valve Actuator. Buletinul Institutului Politehnic Iasi,
vol. LV (LIX), pages 9–28, 2009. (indexata ZBMATH)
• [Caruntu and Lazar, 2009b]: C. F. Caruntu and C. Lazar. Predictive Control for Time-Varying Delay
in Networked Control Systems. In 8th IFAC Workshop on Time Delay Systems, pages 49–54, Sinaia,
Romania, 2009. (indexata SCOPUS)
Lista publicatiilor 5
• [Balau, Caruntu et al., 2009a]: A. E. Balau, C. F. Caruntu, C. Lazar and D. I. Patrascu. New Model
for Predictive Control of an Electro-Hydraulic Actuated Clutch. In 8th International Conference Fuel
Economy, Safety and Reliability of Motor Vehicles, volume 1, pages 463–472, Bucuresti, Romania,
2009.
• [C.Lazar, Caruntu and Balau, 2010]: C. Lazar, C. F. Caruntu and A. E. Balau. Modelling and Predictive
Control of an Electro-Hydraulic Actuated Wet Clutch for Automatic Transmission. In IEEE Symposium
on Industrial Electronics, Bari, Italy, 2010. (indexata SCOPUS)
• [Caruntu et al., 2010b]: C. F. Caruntu, A. E. Balau and C. Lazar. Networked Predictive Control Strategy
for an Electro-Hydraulic Actuated Wet Clutch. In IFAC Symposium Advances in Automotive Control,
pages 419–424, Munchen, Germany, 2010.
• [Balau, Caruntu and C.Lazar, 2011b]: A. E. Balau, C. F. Caruntu and C. Lazar. Simulation and Control
of an Electro-Hydraulic Actuated Clutch. Mechanical Systems and Signal Processing, vol. 25, pages
1911–1922, 2011. (cotata ISI, Impact factor = 1.726)
• [Caruntu and C.Lazar, 2011b]: C. F. Caruntu and C. Lazar. Networked Predictive Control for Time-
varying Delay Compensation with an Application to Automotive Mechatronic Systems. accepted for
Journal of Control Engineering and Applied Informatics, 2011. (indexata ISI)
• [Caruntu et al., 2011h]: C. F. Caruntu, D. Onu, F. C. Braescu and C. Lazar. Model predictive control
for real-time simulation of a network-controlled vehicle drivetrain. In 2nd Eastern European Regional
Conference on the Engineering of Computer Based Systems, pages 115–123, Bratislava, Slovakia, 2011.
Rezultatele prezentate ın Capitolul 4 sunt publicate ın:
• [Caruntu et al., 2011f]: C. F. Caruntu, M. Lazar, S. Di Cairano, R. H. Gielen and P. P. J. van den Bosch.
Horizon-1 predictive control of networked controlled vehicle drivetrains. In 18th IFAC World Congress,
pages 3824–3830, Milano, Italy, 2011.
• [Braescu, Caruntu et al., 2011]: F. C. Braescu, C. F. Caruntu, L. Ferariu and C. Lazar. OSEK Based
Embedded Networked Controller Designed to Handle Communication Delays. In 2nd Eastern European
Regional Conference on the Engineering of Computer Based Systems, pages 71–77, Bratislava, Slovakia,
2011.
Capitolul 5 se bazeaza pe rezultatele publicate ın:
• [Caruntu et al., 2010a]: C. F. Caruntu, A. E. Balau and C. Lazar. Cascade based Control of a Drivetrain
with Backlash. In 12th International Conference on Optimization of Electrical and Electronic Equipment,
Brasov, Romania, 2010. (indexata ISI Proceedings)
6 Introducere
• [Caruntu et al., 2011a]: C. F. Caruntu, A. E. Balau, M. Lazar, P. P. J. van den Bosch and S. Di Cairano.
A Predictive Control Solution for Driveline Oscillations Damping. In Hybrid Systems: Computation
and Control, pages 181–190, Chicago, USA, 2011. (indexata ISI Proceedings)
• [Caruntu and C.Lazar, 2011e]: C. F. Caruntu and C. Lazar. Stabilizing MPC for network-controlled
systems with an application to DC motors. In IEEE International Conference on Mechatronics, pages
973–978, Istanbul, Turkey, 2011. (indexata INSPEC)
• [Caruntu and C.Lazar, 2011d]: C. F. Caruntu and C. Lazar. Robustly stabilizing MPC design for net-
worked control systems with an application to DC motors. accepted for IET Control Theory and Appli-
cations, 2011. (cotata ISI, Impact factor = 1.283)
• [Balau, Caruntu and C.Lazar, 2011a]: A. E. Balau, C. F. Caruntu and C. Lazar. Driveline oscillations
modeling and control. In 18th International Conference on Control Systems and Computer Science,
pages 332–338, Bucuresti, Romania, 2011.
• [Caruntu and C.Lazar, 2011c]: C. F. Caruntu and C. Lazar. Robust MPC for TrueTime Simulation
of a Vehicle Drivetrain Controlled through CAN. In 16th IEEE International Conference on Emerging
Technologies and Factory Automation, Toulouse, France, 2011.
• [Caruntu et al., 2011i]: C. F. Caruntu, D. Onu and C. Lazar. Real-time Simulation of a Vehicle Drivetrain
Controlled through CAN using a Robust MPC Strategy. In 15th International Conference on System
Theory, Control and Computing, Sinaia, Romania, 2011.
• [Caruntu and C.Lazar, 2011j]: C. F. Caruntu and C. Lazar. Network-induced time-varying delay model-
ing and predictive compensation with stability guarantee. submitted to IEEE Transactions on Industrial
Informatics, 2011.

Capitolul 2
Sisteme de control ın retea
In acest capitol sunt prezentate sistemele de control ın retea si problemele care apar ın utilizareaacestora (ıntarzieri variabile ın timp, pierderi de pachete de date). Mai mult, sunt descrise diferitemetode de modelare si strategii de compensare pentru ıntarzierile introduse de reteaua de comunicatii.In plus, sistemele cu dinamica rapida din aplicatiile auto sunt alese pentru a realiza experimenteledin aceasta teza si, din acest motiv, sunt descrise pe scurt unele dintre sistemele de control caresunt implementate ın autovehiculele actuale si sunt modelate ıntarzierile care sunt introduse de catrereteaua CAN.
Un sistem de control ın retea este un sistem la care bucla de control este ınchisa printr-o retea decomunicatii ın timp real. Aceste SCR sunt compuse din urmatoarele componente: o parte fixata, sen-zori, elemente de executie si regulatoare care sunt coordonate prin intermediul retelei de comunicatie.Intr-un sistem de control ın retea, senzorii au sarcina de a masura iesirile procesului si de a trim-ite valorile obtinute la regulator prin intermediul retelei. Regulatorul primeste valorile masurate desenzori, calculeaza si trimite marimea de control prin intermediul retelei elementului de executie. El-ementul de executie are sarcina de a aplica marimea de control primita prin intermediul retelei partiifixate [Onat and Parlakay, 2007].
Sistemele de control ın retea sunt acum utilizate pe scara larga ın diferite ramuri din industrie,sistemele de control evoluand remarcabil ın ultimii ani de la sisteme de control independente la sis-teme de control integrate si sisteme de control ın retea [Johansson et al., 2005]. Evolutia lor a ridicatnumeroase semne de ıntrebare ın domeniile de control, de comunicatii si de procesare a datelor cuprivire la relatiile dintre componentele SCR si calitatea sistemului ca ıntreg. SCR au multe avan-taje atractive care includ costul scazut, simplitatea instalarii si a mentenantei, agilitatea crescuta asistemului, fiabilitate si flexibilitate mai mari [Jiangang et al., 2007]. Mai mult, SCR pot fi usor
8 Sisteme de control ın retea
modificate si modernizate prin adaugarea de noi senzori, elemente de executie si/sau regulatoare. Inplus, datorita schimbului eficient de informatii dintre regulatoare, aceste sisteme au posibilitatea dea combina informatiile primite de la sistem la un nivel mai ınalt cu scopul de a lua cele mai bunedecizii [Gupta and Chow, 2008]. Dar, principalele dezavantaje ın utilizarea SCR sunt reprezentate deefectele ıntarzierilor introduse de reteaua de comunicatii ın bucla de control si de pierderile de pachetede date care pot sa apara ın transmiterea datelor [Tipsuwan and Chow, 2003].
Exista numeroase imperfectiuni si restrictii introduse de retelele de comunicatii ce sunt ımpartiteın cinci categorii ın [Heemels et al., 2010], dar, de obicei, ın literatura de specialitate se considera doarunele dintre acestea ın analiza SCR: (i) erori de cuantificare care apar la transmiterea mesajelor prinreteaua de comunicatii, din cauza dimensiunilor mici ale pachetelor de date; (ii) pierderi de pachetede date cauzate de lipsa de fiabilitate a retelei [Onat et al., 2008, de la Pena and Cristofides, 2008,Sheng and Pan, 2010, Li et al., 2008a, Cloosterman et al., 2010, Shen et al., 2010, Onat et al., 2010];(iii) perioade de esantionare si de transmisie variable [Cloosterman et al., 2010,Bernardini et al., 2010];(iv) ıntarzieri variabile ın timp ce pot fi mai mici decat perioada de esantionare [Zhang et al., 2005,Salehi et al., 2008, Gielen and M.Lazar, 2009a, Wang et al., 2010, Huang et al., 2010] sau mai maridecat perioada de esantionare [Li et al., 2008a, Cloosterman et al., 2010, Shen et al., 2010, Cloost-erman et al., 2009]; (v) restrictii cauzate de utilizarea ın comun a retelei de comunicatii de catremai multe noduri, ceea ce duce la posibilitatea ca un singur nod sa transmita informatii la un anumitmoment de timp [Liu et al., 2010].
Sistemele de control ın retea au fost modelate de-a lungul timpului ın functie de necesitati si detipul retelei modelate. In [Luck and Ray, 1990, Luck and Ray, 1994] sistemul de control ın buclaınchisa este facut invariant ın timp prin introducerea de buffere la intrarea regulatorului si a elementu-lui de executie cu scopul de a compensa ıntarzierile variabile din retea. In acest caz, bufferele trebuiesa fie mai mari decat valoarea maxima a ıntazierilor care pot sa apara ın retea. Dezavantajul cel maiimportant al acestei metode este ca face ıntarzierea de control mai mare decat este necesar, ın celemai multe cazuri. Modelul utilizat ın [Krtolica et al., 1994] presupune ıntarzierea marimii de iesirea sistemului cu un anumit numar de perioade de esantionare, corespunzator ıntarzierilor introduse dereteaua de comunicatii. In [Chan and Ozguner, 1995] se utilizeaza o stiva la iesirea senzorului si unsingur registru cu deplasare ıntre senzor si regulator. In acelasi timp, se utilizeaza o forma simpla dea verifica ıntarzierea cu care ajung datele, adaugand fiecarui mesaj dimensiunea stivei din momentultrimiterii mesajului. In [Nilsson et al., 1998] este utilizat un model care captureaza diferite ıncarcariale retelei, avand trei stari: una pentru ıncarcare mica a retelei, una pentru ıncarcare medie si una pen-tru ıncacare mare. Tranzitiile ıntre diferitele stari ale retelei de comunicatii sunt modelate cu ajutorul
Intarzieri variabile ın timp 9
unui lant Markov.
2.1 Intarzieri variabile ın timp
Atunci cand senzorii, elementele de executie si regulatoarele transmit informatii ın retea, ıntarzieri cuo lungime variabila pot sa apara ca urmare a utilizarii ın comun a mediului de comunicatie. Acesteıntarzieri introduse de retea pot varia foarte mult ın functie de perioada transmiterii unui mesaj side ıncarcarea retelei. De obicei, aceste ıntarzieri variaza aleatoriu ın timp [Rodriguez and Menen-dez, 2007] si pot fi clasificate ın functie de directia transferului de date: ıntarzieri de la senzor laregulator τ sc si ıntarzieri de la regulator la elementul de executie τ ca. De fapt, ambele ıntarzieri intro-duse de retea pot fi mai mici sau mai mari decat perioada de esantionare Ts. Intarzierea de prelucrarea datelor de catre regulator τ c cat si ıntarzierile introduse de retea pot fi considerate ca fiind o sin-gura ıntarziere de control τ pentru a facilita analiza sistemului, aceasta abordare fiind deja utilizataın unele strategii de control ın retea. Existenta ıntarzierilor variabile ın timp si imprevizibile pe liniade comunicare este problema cea mai grava ın domeniul de cercetare a sistemelor de control ın retea.Intarzierea din sistemul de comunicatie poate fi privita ca o ıntarziere de timp ın sistemul de con-trol, care introduce un decalaj de faza si, ın cele din urma, ıntarzierile pot destabiliza sistemul si potdeteriora performantele sistemului de control ın bucla ınchisa [Tipsuwan and Chow, 2003].
Intarzierile de la senzor la elementul de executie au fost modelate pornind de la modele simplecare considera ıntarzierile: constante [Luck and Ray, 1990, Nilsson et al., 1998], medii calculate lafiecare perioada de esantionare [Zhang et al., 2006, Velagic, 2008], aleatoare, distribuite uniform ınanumite intervale [Nilsson et al., 1998], dar aceste modele nu iau ın considerare dinamica retelei decomunicatii. De asemenea, modele ARMA (AutoRegressive Moving-Average) au fost utilizate pen-tru a modela ıntarzierile introduse de retelele de comunicatii [Li and Mills, 2001]; lanturile Markov aufost utilizate pentru a modela ıntarzierile aleatoare ın [Krtolica et al., 1994,Nilsson et al., 1998,Wei et
al., 2002]. Aceste metode de modelare a ıntarzierilor sunt utilizate pentru a proiecta si a evalua regu-latoarele utilizate ın SCR cu privire la stabilitatea si performantele sistemului. Un model care carac-terizeaza precis ıntarzierile introduse de retelele de comunicatii este greu de obtinut, dar, ın general,modelele propuse sunt fiabile. In [Gielen and M.Lazar, 2009b, Gielen et al., 2010] ıntarzierile intro-duse de retelele de comunicatii au fost modelate ca incluziuni politopice. Aceasta metoda de mod-elare a ıntarzierilor ca incluziuni politopice va fi utilizata ın Capitolul 4 pentru a modela ıntarzierileintroduse de reteaua CAN. O alta abordare recenta este sa se ia ın considerare ıntarzierea introdusade reteaua de comunicatii ca fiind o perturbatie si de a utiliza un observator la fel ca ın [Natori et
10 Sisteme de control ın retea
al., 2008, Gadamsetty et al., 2009], care observa starea retelei si efectul ıntarzierilor variabile ın timpeste compensat de algoritmul de control. Pornind de la aceasta metoda, ın Capitolul 5 se propuneo noua metoda de modelare a ıntarzierilor de pe calea directa si a celor de pe calea de reactie caperturbatii. In plus, sunt propuse doua metode noi de marginire a perturbatiilor, limitele fiind utilizateın faza de proiectare a regulatoarelor.
Metodele existente de compensare a ıntarzierilor fixe nu sunt potrivite pentru controlul unor sis-teme de control ın retea din moment ce ıntarzierile introduse de acestea sunt variabile ın timp. Inconsecinta, pentru a putea controla ıntarzierile variabile din retea ıntr-un sistem ın bucla ınchisa suntnecesare metode de control avansate [Tipsuwan and Chow, 2003].
Pe parcursul ultimilor ani, problema compensarii ıntarzierilor care apar ıntr-o retea de comunicatiia fost intens studiata, fiind propuse mai multe strategii de compensare: regulator LQG optimal[Luck and Ray, 1990], metoda determinista de compensare [Luck and Ray, 1994], metoda proba-bilistica de compensare [Chan and Ozguner, 1995], metoda stohastica optimala de control pentru oretea cu ıntarzieri aleatoare [Nilsson et al., 1998], strategie de control predictiv [Liu et al., 2004],metoda care aplica Logica Fuzzy unui regulator PID [Cao and Zhang, 2006], regulator cu predic-tor Smith ın retea cu adaptare la ıntarzierile care apar ın retea [Velagic, 2008], strategie de controlpredictiv bazata pe functii de control Lyapunov [Gielen and M.Lazar, 2009b, Gielen et al., 2010].
2.2 Sisteme de control ın retea din autovehicule
Din marea varietate de sisteme cu dinamica rapida, ın aceasta teza se pune accent pe subclasa sis-temelor din autovehicule, care au dinamica rapida, necesitand perioade mici de esantionare.
Un autovehicul modern are ın componenta sisteme mecanice (motor, ambreiaj, transmisie, sistemde franare, coloana de directie, suspensii), componente electronice si digitale (unitati electronice decontrol, senzori, elemente de executie, retele digitale) si aplicatii software (aplicatii de control/reglare,sisteme de operare ıncorporate). Intr-un astfel de autovehicul, retelele de comunicatii detin un rolimportant deoarece autovehiculul este un sistem distribuit, deci functionarea acestuia depinde de co-laborarea dintre anumite componente aflate ın locatii diferite. Inainte de aparitia sistemelor elec-tronice pentru autovehicule, comunicatia ıntre aceste componente se facea cu sisteme mecanice sauhidraulice [Li et al., 2008a], ınsa sistemele moderne din autovehicule sunt organizate ierarhic si dis-tribuite ıntr-o retea de comunicatii cu control descentralizat.
Studiile recente din domeniul ingineriei auto propun diferite modele pentru motor, cutie de vitezesi sasiu si metode avansate de control pentru a creste performantele vehiculului ın ansamblu, economia
Sisteme de control ın retea din autovehicule 11
de combustibil, siguranta si confortul. In plus, ın zilele noastre, conducatorul auto nu are accesdirect la componentele mecanice ale unui vehicul ci, ın schimb, comenzile sale trec printr-o unitateelectronica de control (ECU - Electronic Control Unit) care controleaza principalele componente aleunui vehicul: motorul, cutia de viteze, franele, diferentialul si chiar sistemul de directie. Pedala deacceleratie si pedalele de frana nu sunt conectate direct la valvele de presiune corespunzatoare; celedoua semnale trec printr-un ECU care decide daca comenzile primite de la conducatorul auto ar trebuisa fie urmate, sau, pe baza masuratorilor primite de la senzori, acesta ar trebui sa aplice alte comenzipentru a mentine stabilitatea vehiculului ın caz de urgenta. De asemenea, ın autovehiculele echipatecu transmisie automata, raportul de transmisie este schimbat de un alt ECU si, ın unele autovehiculecu tractiune integrala 4x4, diferentialul poate fi blocat sau deblocat de catre un alt ECU.
Desi majoritatea strategiilor de control care sunt implementate ın autovehiculele actuale suntbazate pe metode euristice si pe tabele, s-a aratat ca strategiile de control predictiv au un potentialmare pentru controlul subsistemelor din autovehicule, de exemplu, ABS (Anti-lock Braking Sys-tem) [Yoo and Wang, 2007], dinamica autovehiculului [Anwar, 2007], elemente de executie meca-tronice [Di Cairano et al., 2007], lantul de transmisie a puterii [Saerens et al., 2008], motor [DiCairano et al., 2010].
Toate solutiile de control prezentate mai sus presupun ca senzorii, regulatoarele si elementelede executie sunt conectate direct, ceea ce nu este realist. Mai degraba, ın autovehiculele moderne,semnalele de control de la regulatoare si valorile masurate de senzori sunt trimise utilizand o retea decomunicatii, de exemplu, CAN sau FlexRay, ıntre componentele sistemului de control. Acest lucruaduce o noua provocare cu privire la modul ın care sunt luate ın considerare efectele ıntarzierilorintroduse de retea si pierderilor de pachete de date ın bucla de control. Intarzierile pot fi necunoscutesi variabile ın timp, si pot degrada performantele sistemelor de control proiectate fara a le lua ınconsiderare si pot chiar destabiliza sistemul de control ın bucla ınchisa.
La ınceputul aparitiei sistemelor electronice, comunicatiile ın autovehicule ıntre dispozitive sim-ple, cum ar fi comutatoarele si elementele de executie, se realizau utilizand conexiuni punct-la-punct,rezultand o retea de conexiuni voluminoasa, costisitoare si complicata care era greu de realizat siinstalat. O data cu cresterea posibilitatilor de comunicatii din autovehicule, numarul de conexiunia crescut atat de mult, ıncat volumul, fiabilitatea si greutatea acestora a devenit o adevarata prob-lema [Leen et al., 1999].
Functionarea ın siguranta a unui autovehicul depinde nu numai de performanta si mecanismulde acces la sistemul de comunicatii, dar necesita, de asemenea, transferi de date fiabile cu privire laerorile de transmisie si retransmisie, robustetea sistemului de comunicatie si a unitatilor de control.
12 Sisteme de control ın retea
Pentru a asigura functionarea consecventa a unui autovehicul ın timp real, transmisia datelor trebuiesa se faca la timp, astfel ıncat apare necesitatea determinarii unor limite rezonabile pentru ıntarzierilecare apar la transmiterea datelor critice.
Rezultatele prezentate ın [Klehmet et al., 2008, Herpel et al., 2009], care are ca scop oferireaunei metode de calcul a timpului maxim de raspuns a fiecarui mesaj trimis pe CAN ın aplicatiileauto, este folosit pentru a determina limita superioara a ıntarzierilor care sunt introduse de reteauade comunicatii. Rezultatul se bazeaza pe Network Calculus [Le Boudec and Thiran, 2001], care esteo teorie a sistemelor de asteptare deterministe , bazat pe algebra min-plus. Un obiectiv este de adetermina limitele inferioare si superioare pentru ıntarzierile care apar la transmiterea datelor ıntr-oretea de comunicatii. Tehnica Network Calculus necesita doar identificatorii de CAN alocati static siintervalele de timp dintre doua mesaje consecutive transmise de fiecare dispozitiv din retea.
Limita superioara pentru ıntarzierile ce pot aparea ıntr-o retea CAN la transmiterea unor date decatre un dispozitiv aflat pe nivelul de prioritate j, utilizand teoria Network Calculus, este data de
dj ≤(j + 2) · l
R−∑j−1i=0 (l/ci)
, (2.1)
unde l = 136 biti reprezinta numarul maxim de biti ai unui mesaj, R = 500 kbps kb/s reprezinta ratade transfer a protocolului CAN, iar ci reprezinta intervalul dintre doua mesaje consecutive transmisede un dispozitiv aflat pe nivelul de prioritate i.
Capitolul 3
Control predictiv liniar ın retea
Intarzierea variabila ın timp introdusa de catre retelele de comunicatii este principalul factor caredeterioreaza performantele sistemelor de control ın retea. In acest capitol, se presupune ca ıntarzierileintroduse de reteaua de comunicatii sunt marginite si trei metode de modelare a ıntarzierilor variabileın timp introduse de reteaua de comunicatii sunt propuse: metoda mediei, metoda identificarii simetoda de adaptare.
Mai mult, o noua strategie de control predictiv liniar ın retea (CPLR) este propusa, cu scopul de acontrola iesirea unui proces fizic, ın timp ce sunt compensate efectele ıntarzierilor variabile ın timp,prin utilizarea metodelor de modelare propuse. In plus, se propune o noua metoda (λ-scheduling),prin care regulatorul este adaptat la diferenta dintre referinta dorita si iesirea partii fixate. Apoi,strategia propusa este aplicata cu scopul de a controla mai multe parti fixate (procese rapide) dinaplicatiile auto (motor de curent continuu, motor cu ardere interna, sistem valva-ambreiaj, lant detransmisie a puterii) si pentru a reduce influenta ıntarzierlor variabile ın timp introduse de SCR privindperformantele sistemului de control ın bucla ınchisa.
Performantele strategiei de control propuse sunt demonstrate de rezultatele de simulare obtinutesi comparatiile cu alte strategii de control ın retea (PID, Predictor Smith adaptiv) dovedesc importantametodelor de modelare propuse si a strategiei de control. De asemenea, strategia de control predictivın retea a fost testata pe un stand ın timp real si rezultatele obtinute dovedesc faptul ca strategiapropusa poate fi implementata pentru a controla efectiv procesul fizic.
14 Control predictiv liniar ın retea
3.1 Modelarea partii fixate incluzand ıntarzierile
Se considera partea fixata descrisa de modelul CARIMA (Controlled AutoRegressive Integrated Mov-ing Average) [Camacho and Bordons, 2004]
A(z−1)yk = z−dB
(z−1)uk−1 +
ekC (z−1)
D (z−1), (3.1)
unde d este ıntarzierea introdusa de reteaua de comunicatii la momentul de timp k ∈ Z+ si ekreprezinta un zgomot alb cu valoare medie nula.
A (z−1) si B (z−1) sunt polinoamele sistemului
A(z−1)
= 1 + a1z−1 + ...+ anA
z−nA ,
B(z−1)
= b0 + b1z−1 + ...+ bnB
z−nB ,(3.2)
unde nA si nB reprezinta gradele polinoamelor si C (z−1) si D (z−1) sunt polinoamele perturbatiilorsi sunt egale cu
C(z−1)
= 1,
D(z−1)
= 1− z−1,(3.3)
pentru a obtine eroare stationara nula.
Se considera ca ıntarzierea introdusa de reteaua de comunicatii dc este variabila ın timp, darmarginita
dm ≤ dc ≤ dM , (3.4)
unde dm este ıntarzierea minima si dM este ıntarzierea maxima care pot sa apara ın reteaua decomunicatii.
In subsectiunile urmatoare, trei metode de considerare a ıntarzierilor de catre algoritmul de controlpredictiv sunt propuse [Caruntu and Lazar, 2009b,Caruntu et al., 2010b,Balau, Caruntu and C.Lazar, 2011b,Caruntu and C.Lazar, 2011b].
3.1.1 Metoda mediei
In aceasta abordare, ıntarzierea luata ın considerare de catre strategia predictiva de control se cal-culeaza utilizand valoarea medie a ıntarzierilor care pot aparea ın reteaua de comunicatii si este data
Modelarea partii fixate incluzand ıntarzierile 15
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.80
2
4
6
8
Time [s]
Tor
que
[Nm
]
d=dm=0d=dM=12Td=(dm+dM)/2=6TARX model
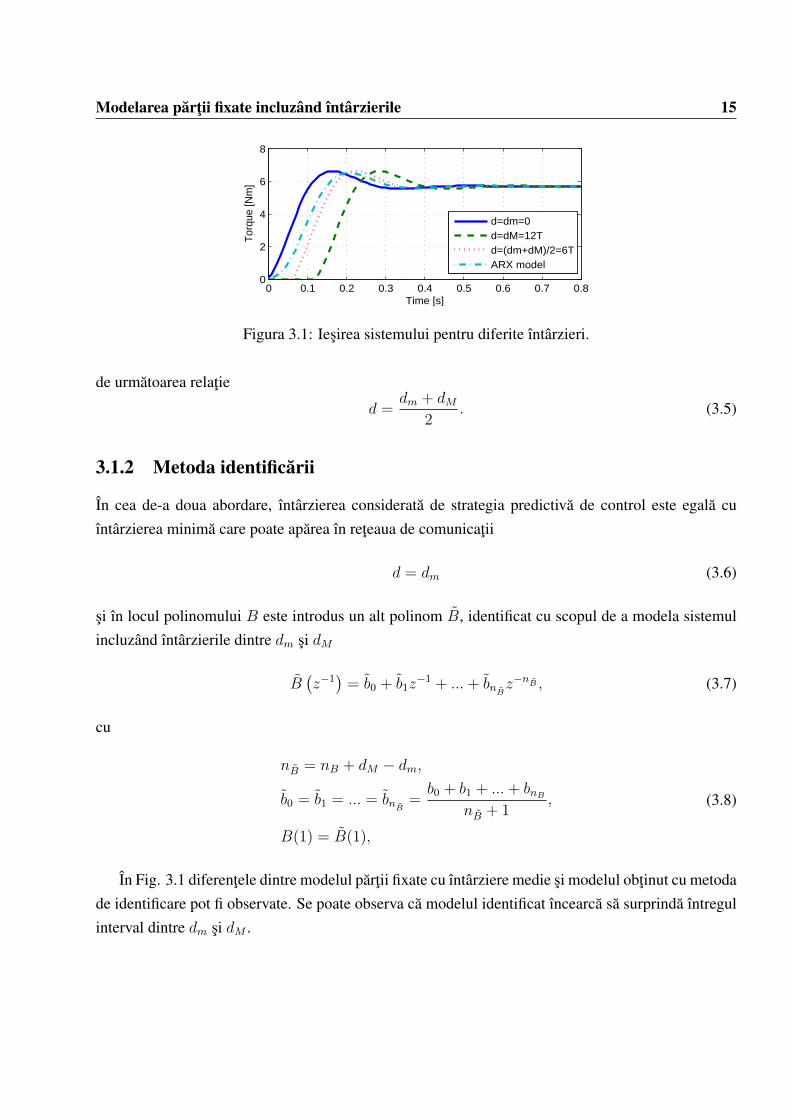
Figura 3.1: Iesirea sistemului pentru diferite ıntarzieri.
de urmatoarea relatie
d =dm + dM
2. (3.5)
3.1.2 Metoda identificarii
In cea de-a doua abordare, ıntarzierea considerata de strategia predictiva de control este egala cuıntarzierea minima care poate aparea ın reteaua de comunicatii
d = dm (3.6)
si ın locul polinomului B este introdus un alt polinom B, identificat cu scopul de a modela sistemulincluzand ıntarzierile dintre dm si dM
B(z−1)
= b0 + b1z−1 + ...+ bnB
z−nB , (3.7)
cu
nB = nB + dM − dm,
b0 = b1 = ... = bnB=b0 + b1 + ...+ bnB
nB + 1,
B(1) = B(1),
(3.8)
In Fig. 3.1 diferentele dintre modelul partii fixate cu ıntarziere medie si modelul obtinut cu metodade identificare pot fi observate. Se poate observa ca modelul identificat ıncearca sa surprinda ıntregulinterval dintre dm si dM .
16 Control predictiv liniar ın retea
3.1.3 Metoda de adaptare
In cea de-a treia abordare, la fiecare perioada de esantionare, ıntarzierea utilizata de strategia predic-tiva de control se calculeaza utilizand urmatoarea relatie
d = 2
N∑i=1
τ sci
N, (3.9)
unde τ sci este ıntarzierea de la senzor la regulator la pasul i. In acest fel, valoarea medie aN ıntarzierianterioare se calculeaza.
Aceasta metoda este conceputa pentru a adapta algoritmul de control la ıntarzierile variabile ıntimp introduse de reteaua de comunicatii. Algoritmul de adaptare este proiectat pornind de la pre-supunerea ca ıntarzierile medii de la senzor la regulator si de la regulator la elementul de executiesunt egale, ambele fiind variabile.
Spre deosebire de primele doua metode de modelare, ın cazul metodei de adaptare nu este nevoiesa se cunoasca limita superioara a ıntarzierilor introduse de reteaua de comunicatii.
3.2 Proiectarea regulatorului predictiv liniar ın retea
Se considera partea fixata descrisa de modelul CARIMA (3.1) si cele trei metode de considerare aıntarzierilor care trebuie sa satisfaca conditia (3.4).
3.2.1 Modelul predictorului
Modelul predictorului este dat de
yk+j|k = Gj−d(z−1)D(z−1)z−d−1uk+j+
+Hj−d (z−1)D (z−1)
C (z−1)uk−1 +
Fj−d (z−1)
C (z−1)yk
(3.10)
cu j = hi, hp, unde hi este orizontul minim de predictie si hp este orizontul de predictie. uk+j−1|k, j =
1, hc reprezinta secventa de comenzi viitoare, calculate la momentul k si yk+j|k reprezinta valorilepredictate ale iesirii, hc fiind orizontul comenzii.
Utilizand cele trei metode de considerare a ıntarzierilor de catre strategia predictiva de control,d din (3.10) este dat de (3.5) pentru metoda mediei, de (3.6) pentru metoda identificarii si de (3.9)
Proiectarea regulatorului predictiv liniar ın retea 17
pentru metoda de adaptare.
Pentru determinarea polinoamelor Fj−d (z−1), Gj−d (z−1) si Hj−d (z−1) sunt utilizate cele douaecuatii diofantice prezentate ın [Camacho and Bordons, 2004].
Modelul predictorului rezulta de forma
yk+j|k = Gj−d(z−1)D(z−1)z−d−1uk+j + y0,k+j|k (3.11)
undey0,k+j|k =
Hj−d (z−1)D (z−1)
C (z−1)uk−1 +
Fj−d (z−1)
C (z−1)yk (3.12)
reprezinta raspunsul liber al sistemului.
Considerand ca intrari D(z−1)uk si punand predictorii de ordin j sub forma matriciala, modelulpredictorului poate fi rescris de forma
y = Gud + y0 (3.13)
undey = [yk+hi|k, yk+hi+1|k, . . . , yk+hp|k]
>, (3.14)
ud =[D(z−1)uk, . . . , D(z−1)uk+hc−1
]>, (3.15)
y0 = [y0,k+hi|k, y0,k+hi+1|k, . . . , y0,k+hp|k]> (3.16)
si matricea G este data ın [Camacho and Bordons, 2004].
Functia obiectiv se bazeaza pe minimizarea erorii de reglare si pe minimizarea comenzii, factorulde ponderare λ fiind introdus cu scopul de a face un compromis ıntre aceste doua obiective
J = (Gud + y0 −w)T (Gud + y0 −w) + λudTud, (3.17)
cu conditia D(z−1)uk+i = 0 pentru i ∈ [hc, hp− d− 1], unde w este vectorul traiectoriei referintacu componentele wk+j|k, j = hi, hp. Minimizand funtia obiectiv (∂J/∂ud = 0), secventa optimalade control rezulta de forma
u∗d =(GTG + λIhc
)−1GT [w − y0] . (3.18)

18 Control predictiv liniar ın retea
Utilizand principiul orizontului alunecator si considerand ca γj, j = hi, hp sunt elementele primeilinii din matricea
(GTG + λIhc
)−1GT, rezulta urmatorul algoritm de control
D(z−1)uk =
hp∑j=hi
γj[wk+j|k − y0,k+j|k
]. (3.19)
Cu y0,k+j|k din (3.12), algoritmul de control poate fi rescris astfel
C(z−1)D(z−1)uk =
−hp∑j=hi
γjHj−d(z−1)D(z−1)uk−1−
−hp∑j=hi
γjFj−d(z−1)yk +
hp∑j=hi
γjC(z−1)wk+j,
(3.20)
Regulatorul predictiv liniar ın retea poate fi determinat analitic off-line utilizand relatia (3.20),ceea ce ınseamna ca marimea de comanda poate fi calculata foarte rapid, astfel ıncat acest algoritmeste capabil sa satisfaca restrictiile de timp asociate proceselor rapide.
3.2.2 Metoda λ-scheduling
Scopul acestei metode este de a adapta algoritmul de control la diferenta dintre referinta dorita siiesirea procesului fizic. Fiind cunoscut faptul ca λ este parametrul utilizat pentru a face un compromisıntre minimizarea erorii de reglare si minimizarea marimii de comanda, este usor sa se arate ca, princresterea parametrului λ, iesirea procesului ajunge la referinta mai ıncet, si prin scaderea parametruluiλ, iesirea procesului ajunge mai rapid la referinta, dar cu o anumita suprareglare. Deci, solutia propusaeste de a modifica parametrul λ on-line, ın functie de eroarea dintre referinta dorita si de iesireaprocesului fizic de [Caruntu and C.Lazar, 2011b].
Se considera urmatoarea eroare normalizata
ek =wk − ykwk
, (3.21)
care ia valori ın intervalul [1, 0].
Acum, considerand ca λmin si λmax sunt doua valori suficient de mici, respectiv mari, pentru λ,

Control predictiv liniar ın retea pentru procesele rapide din sistemele auto 19
0 0.05 0.1 0.15 0.2 0.25 0.30
1
2
3
4
5x 10
−3
Time [s]
Clu
tch
disp
lace
men
t [m
]
referencePI without delayPI with delaySmith predictor with delay
Figura 3.2: Deplasarea ambreiajului (PI & predictor Smith).
este usor sa se faca o legatura ıntre ek si λk ın asa fel ıncat
λk = (1− ek)(λmax − λmin) + λmin =
= −(λmax − λmin)ek + λmax,(3.22)
astfel, pe masura ce ek scade, parametrul λk creste.
3.3 Control predictiv liniar ın retea pentru procesele rapide dinsistemele auto
In aceasta sectiune, sunt proiectate mai multe regulatoare predictive liniare, bazate pe metoda mediei,metoda identificarii, metoda de adaptare si metoda λ-scheduling, pentru un subsistem valva-ambreiajutilizat la cutiile de viteze automate. CAN este utilizat ca mediu de comunicatie pentru toate studi-ile de caz, fiind cea mai raspandita retea de comunicatii din aplicatiile auto. Au fost facute diversecomparatii cu alte regulatoare proiectate pentru controlul ın retea, de exemplu, regulator PID si pre-dictor Smith adaptiv.
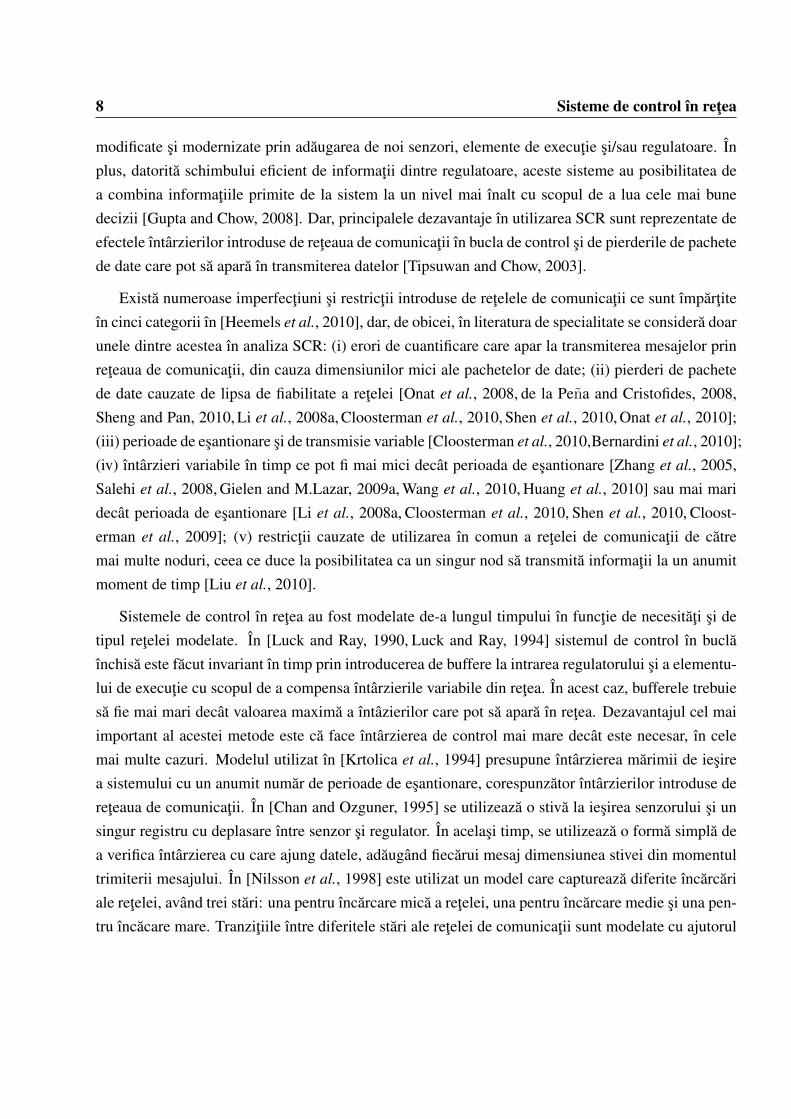
Un semnal de tip treapta a fost aplicat ca referinta pentru deplasarea pistonului ambreiajului sis-a dorit ca sistemul sa urmareasca semnalul de referinta cat mai repede posibil, urmatoarele figuriilustrtand rezultatele obtinute si semnalul de referinta . In Fig. 3.2, deplasarile pistonului ambreiajuluiobtinute de catre regulatoarele PI si predictorul Smith sunt reprezentate.
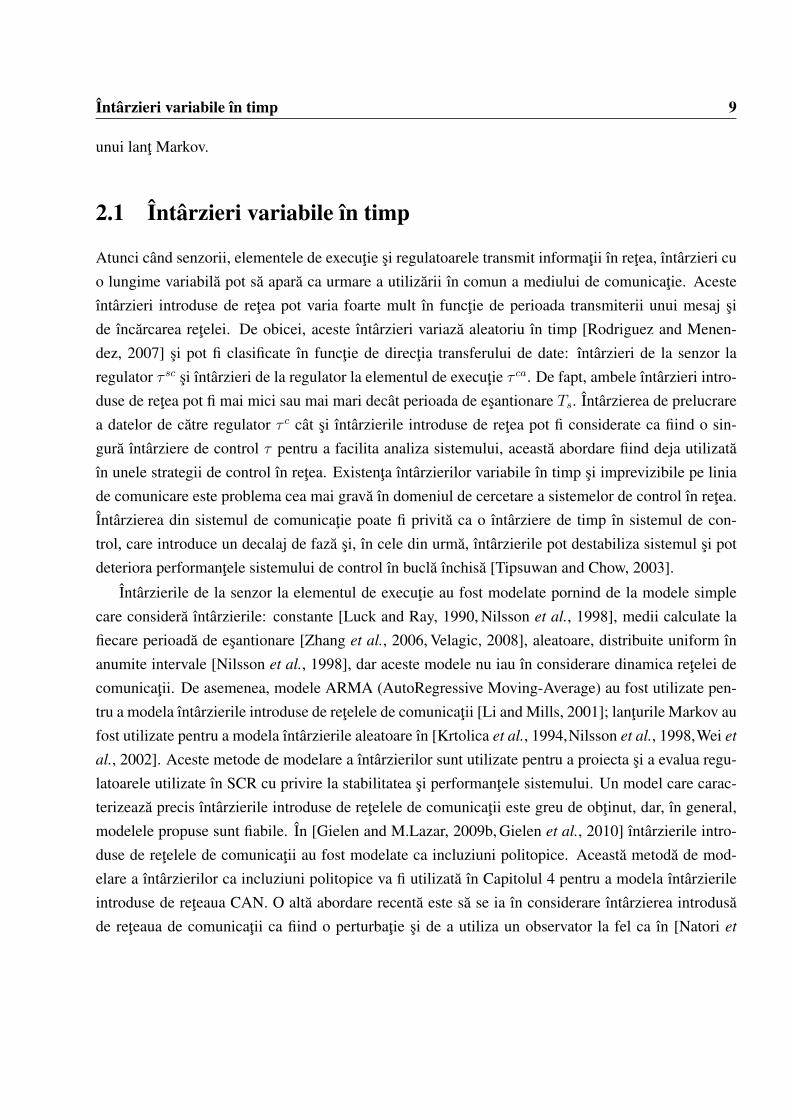
Fig. 3.3 ilustreaza referinta pentru deplasarea pistonului ambreiajului si raspunsurile sistemuluide control ın retea atunci cand este aplicata strategia de control predictiv liniar ın retea. Se poateobserva ca sistemul urmareste semnalul de referinta, neavand eroare de regim stationar si are un timp

20 Control predictiv liniar ın retea
0 0.05 0.1 0.15 0.2 0.25 0.30
1
2
3
4
5x 10
−3
Time [s]
Clu
tch
disp
lace
men
t [m
]
referenceaverageidentificationadaptationλ−scheduling
Figura 3.3: Deplasarea ambreiajului (CPLR).
de crestere ın conformitate cu necesitatile corespunzatoare acestui tip de aplicatie auto.
Raspunsurile sunt ın mod clar diferite de cele obtinute cu regulatoarele PI si de predictorul Smith.Raspunsurile obtinute de regulatoarele PI si de predictorul Smith au o suprareglare evidenta, ın timpce raspunsurile obtinute de regulatoarele predictive sunt similare ıntre ele cu exceptia faptului catimpul de crestere pentru metodele de adaptare si λ-scheduling este mult mai mai mic decat timpii decrestere pentru celelalte metode.
3.4 Rezultate experimentale
ın aceasta sectiune, performantele regulatorului predictiv liniar de control ın retea proiectat cu scopulde a amortiza oscilatiile lantului de transmisie a puterii, ın timp ce se diminueaza efectele ıntarzierilorvariabile ın timp introduse de retaua de comunicatii, asupra performantelor sistemului de control ınbucla ınchisa, sunt evaluate pe baza rezultatelor obtinute pe un stand de simulare ın timp real.
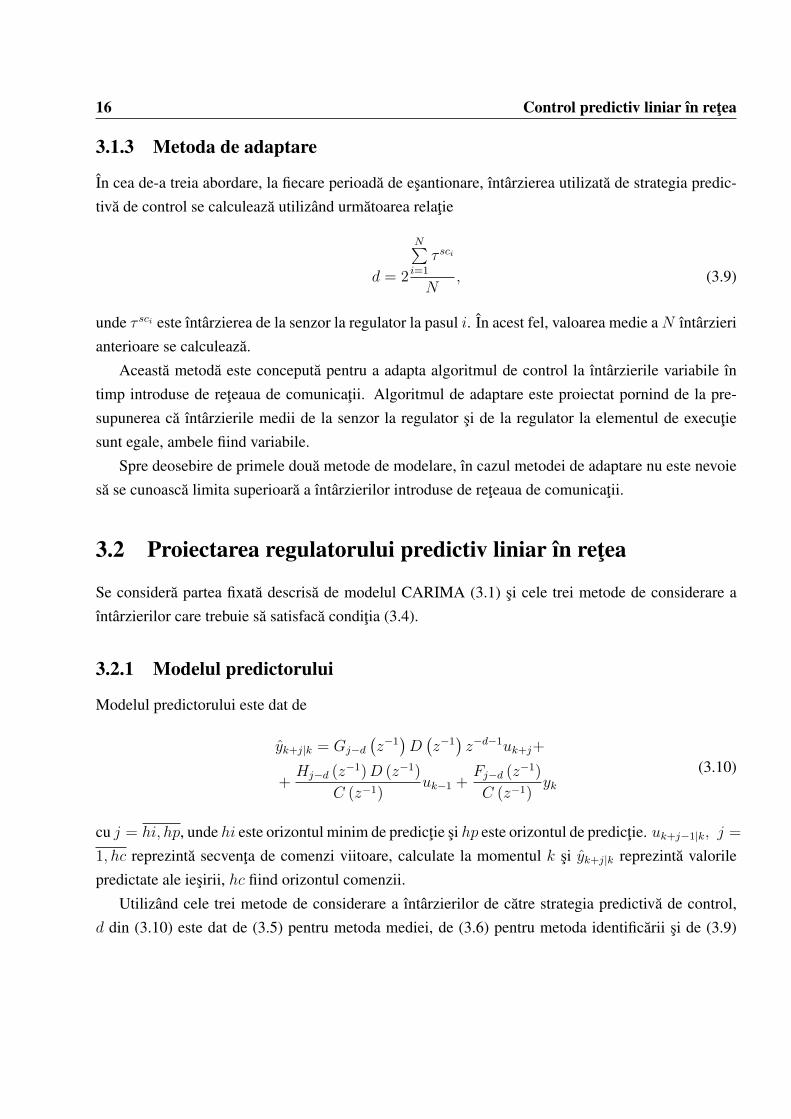
Standul de simulare ın timp real proiectat pentru validarea algoritmului predictiv de control estealcatuit din: dSPACE MicroAutoBox, PC, retea CAN, un model Simulink al lantului de transmisie aputerii si al regulatorului si o interfata grafica (GUI), asa cum este reprezentat ın Fig. 3.4. Se poateobserva ca modelul Simulink al lantului de transmisie a puterii si al regulatorului realizeaza schimburide date prin intermediul unei magistrale CAN. De asemenea, PC-ul are acces la magistrala CAN prinintermediul aplicatiei ControlDesk dezvoltate.
Aceasta sectiune trateaza problema amortizarii oscilatiilor lantului de transmisie a puterii,fiindcritica pentru ımbunatatirea manevrabilitatii autovehiculului si a confortului pasagerilor. Proiectareaunui regulator care sa amortizeze aceste oscilatii reprezinta o problema dificila avand ın vedere calanturile de transmisie a puterii la autovehicule sunt caracterizate de o dinamica rapida si care sunt
Rezultate experimentale 21
Ethernet
MicroAutoBoxHost PC
C A N
Figura 3.4: Real-time test-bench.
supuse unor constrangeri fizice si de control foarte stricte. In plus, ın implementarile actuale seutilizeaza o retea de comunicatii pentru a realiza schimburile de informatii dintre componentele sis-temului de control care introduce ıntarzieri variabile ın timp.
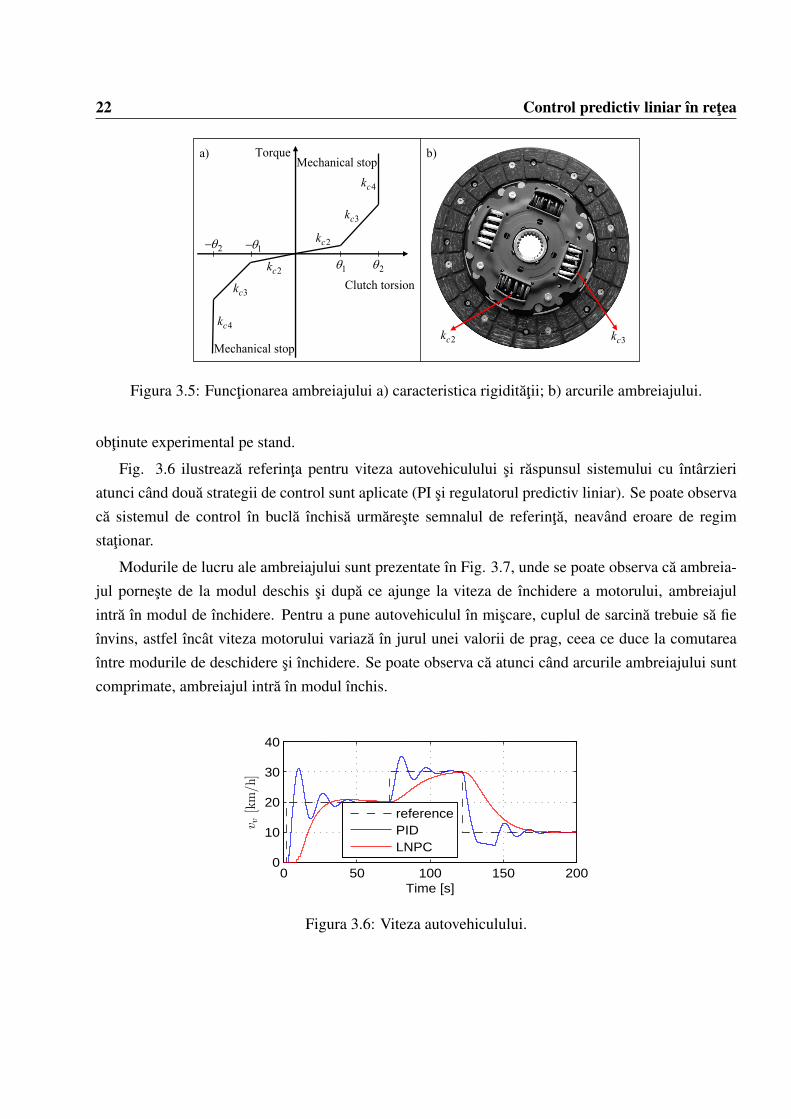
Atunci cand se studiaza un ambreiaj ın detaliu, se observa ca flexibilitatea sa la torsiune esterezultatul unui aranjament de arcuri cu rigiditate mai mica ın serie cu arcuri cu rigiditate mai mare,asa cum se poate observa ın Fig. 3.5. Fig. 3.5. a) ilustreaza caracteristica rigiditatii ambreiajului sidispunerea arcurilor ambreiajului este prezentata ın Fig. 3.5. b). Motivul acestui aranjament este dea izola vibratiile. Spre deosebire de abordarile anteriore de modelare, cazuri ın care doar doua sautrei moduri de functionare sunt luate ın considerare pentru dinamica ambreiajului, ın aceasta sectiunepatru moduri de functionare sunt introduse: deschis, ınchidere, ınchis si blocat, ceea ce conduce laobtinerea unui model mai exact la ambreiajului.
In modul deschis, nu exista nici o legatura mecanica ıntre motor si restul lantului de transmisiea puterii, astfel ıncat cuplul nu este transmis catre roti. In modul de ınchidere, arcurile mai mici dinambreiaj sunt comprimate, ceea ce ınseamna ca o parte din cuplul motor este transmis treptat catreroti. In modul ınchis, arcurile mai rigide din ambreiaj sunt comprimate si transmiterea treptata acuplului la roti continua. Modul blocat corespunde fazei ın care arcurile din ambreiaj nu mai pot ficomprimate, ambreiajul ajunge la un stop mecanic, deci valoarea maxima a cuplului este transmis dela motor la roti prin intermediul lantului de transmisie a puterii.
O secventa de trepte a fost aplicata ca referinta pentru viteza vehiculului si s-a dorit ca sistemulsa urmareasca semnalul de referinta cat mai repede posibil, urmatoarele figuri ilustrand rezultatele
22 Control predictiv liniar ın retea
a) b)
3ck 2ck
1θ 2θ
1θ− 2θ−
Torque
Clutch torsion
2ck
3ck
4ck
4ck
3ck
2ck
Mechanical stop
Mechanical stop
Figura 3.5: Functionarea ambreiajului a) caracteristica rigiditatii; b) arcurile ambreiajului.
obtinute experimental pe stand.
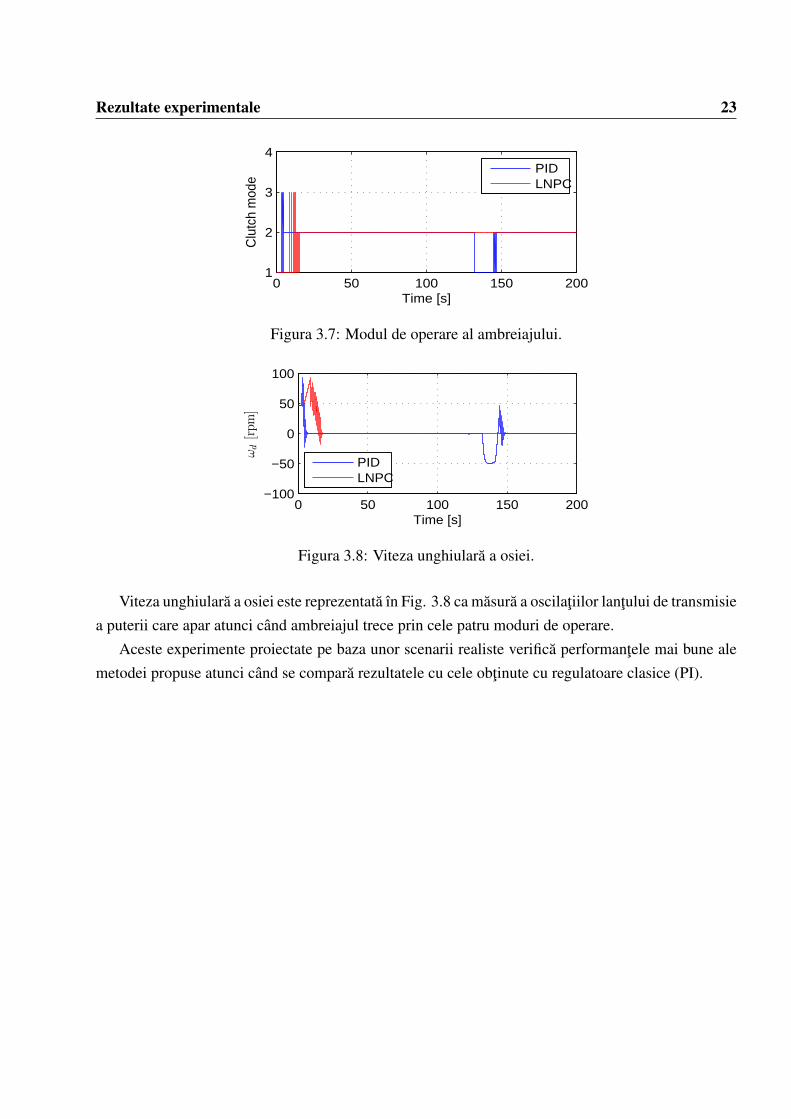
Fig. 3.6 ilustreaza referinta pentru viteza autovehiculului si raspunsul sistemului cu ıntarzieriatunci cand doua strategii de control sunt aplicate (PI si regulatorul predictiv liniar). Se poate observaca sistemul de control ın bucla ınchisa urmareste semnalul de referinta, neavand eroare de regimstationar.
Modurile de lucru ale ambreiajului sunt prezentate ın Fig. 3.7, unde se poate observa ca ambreia-jul porneste de la modul deschis si dupa ce ajunge la viteza de ınchidere a motorului, ambreiajulintra ın modul de ınchidere. Pentru a pune autovehiculul ın miscare, cuplul de sarcina trebuie sa fieınvins, astfel ıncat viteza motorului variaza ın jurul unei valorii de prag, ceea ce duce la comutareaıntre modurile de deschidere si ınchidere. Se poate observa ca atunci cand arcurile ambreiajului suntcomprimate, ambreiajul intra ın modul ınchis.
0 50 100 150 2000
10
20
30
40
Time [s]
v v[km/h
]
referencePIDLNPC
Figura 3.6: Viteza autovehiculului.
Rezultate experimentale 23
0 50 100 150 2001
2
3
4
Time [s]
Clu
tch
mod
e
PIDLNPC
Figura 3.7: Modul de operare al ambreiajului.
0 50 100 150 200−100
−50
0
50
100
Time [s]
ωd[rpm
]
PIDLNPC
Figura 3.8: Viteza unghiulara a osiei.
Viteza unghiulara a osiei este reprezentata ın Fig. 3.8 ca masura a oscilatiilor lantului de transmisiea puterii care apar atunci cand ambreiajul trece prin cele patru moduri de operare.
Aceste experimente proiectate pe baza unor scenarii realiste verifica performantele mai bune alemetodei propuse atunci cand se compara rezultatele cu cele obtinute cu regulatoare clasice (PI).

24 Control predictiv liniar ın retea
Capitolul 4
Control predictiv neliniar ın retea
Proiectarea unui regulator pentru sisteme care sunt caracterizate printr-o dinamica rapida si supuseunor constrangeri fizice si de reglare poate fi o problema dificila. In plus, ın implementarile actuale,conexiunile dintre regulator si partea fixata sunt realizate utilizand o retea de comunicatii care intro-duce ıntarzieri variabile ın timp.
Scopul acestui capitol este de a oferi o strategie de proiectare a unui regulator predictiv ın reteacare sa faca fata ıntarzierilor variabile ın timp si limitarilor sistemului si sa furnizeze o solutie efi-cienta. In acest scop, ın primul rand, este aplicata o tehnica de aproximari politopice pentru a obtineun model discret al buclei de reglare ınchise prin intermediul retelei CAN. In al doilea rand, un regu-lator predictiv pe un pas bazat pe functii de control flexibile Lyapunov [M.Lazar 2009] este proiectatpentru modelul rezultat cu incertitudini politopice si restrictii. Acest algoritm are potentialul de asatisface cerintele de timp, ca urmare a orizontului de predictie mic, ın timp ce poate oferi o solutieneconservativa de stabilizare datorita flexibilitatii functiei Lyapunov. O problema de optimizare (careurmeazasa fie rezolvata on-line) este construita, care impune stabilitatea printr-o constrangere de tipCLRF (control Lyapunov-Razumikhin function) si include, de asemenea, si restrictii ale starilor siintrarilor. Pentru a satisface ultimele restrictii, o solutie pentru relaxarea conditiei de tip CLRF estefurnizata, prin introducerea unei variabile de optimizare auxiliare care adauga flexibilitate conditieiCLRF. Convergenta catre echilibru este garantata totusi printr-o noua conditie care limiteaza variabilade optimizare auxiliara.
Pentru a ilustra potentialul aplicarii metodei pentru procese rapide, cu perioade de esantionaremici, regulatorul propus este aplicat pentru a controla un lant de transmisie a puterii la autovehicule.Ca atare, studiul de caz luat ın considerare ın acest capitol este de a minimiza oscilatiile lantuluide transmisie a puterii ın timp ce sunt compensate ıntarzierile variabile ın timp introduse de CAN.

26 Control predictiv neliniar ın retea
Toolbox-ul TrueTime (pentru Matlab/Simulink), care permite simularea sistemelor de control ın reteaın timp real, tinand seama de efectele de executare a sarcinilor de control si de transmitere a datelorcu privire la dinamica sistemului de control, a fost folosit ca mediu de simulare. Mai multe simulariTrueTime, definite ın colaborare cu Ford Research and Advanced Engineering, SUA, valideaza abor-darea propusa, indicand faptul ca strategia dezvoltata are potentialul de a ındeplini constrangerile careapar la simularile ın timp real. De asemenea, rezultatele de simulare indica faptul ca performanteleobtinute cu strategia propusa sunt ımbunatatite ın comparatie cu rezultatele obtinute cu alte tipuri deregulatoare, cum ar fi PID sau regulator predictiv explicit.
Abordarea propusa a fost verificata, de asemenea, experimental cu ajutorul unui stand de test de tipHIL (Hardware-In-the-Loop), realizat ın colaborare cu Continental Automotive Romania, constanddintr-o unitate electronica de control bazata pe un procesor Freescale (care pune ın aplicare regu-latorul) legata printr-o magistrala CAN cu un simulator al partii fixate implementat de un dSPACEMicroAutoBox.
4.1 Modelarea ıntarzierilor ca incluziuni politopice
Dandu-se limita superioara determinata ın prealabil a ıntarzierilor variabile ın timp introduse dereteaua CAN, sarcina este de a se obtine un model discret al buclei ın circuit ınchis care tine contde ıntarzierile care apar ın retea ın limitele determinate [Caruntu et al., 2011f]. Astfel, se considerasistemul continuu, cu ıntarziere pe intrare introdusa de CAN
x(t) = Acx(t) +Bcu(t− τ),
u(t) = uk,∀t ∈ [tk + τk, tk+1 + τk+1),(4.1)
unde x(t) este starea sistemului, u(t) este intrarea sistemului, Ac si Bc sunt matricile sistemului,τ = τ sc + τ ca reprezinta ıntarzierea introdusa de retea, tk = kTs, k ∈ Z+, Ts ∈ R+ este perioadade esantionare si se presupune ca u(t) = u0 pentru toti t ∈ [0, τ0] cu u0 ∈ Rm un vector constantdeterminat a priori. uk ∈ R este comanda generata la momentul de timp t = tk. τk ∈ R[0,τmax]
reprezinta ıntarzierea introdusa de retea la momentul de timp k ∈ Z+ si τmax ∈ R+ este ıntarziereamaxima care poate fi introdusa de reteaua de comunicatii.
Se considera ıntarzierea maxima determinata cu relatia (2.1) de forma τmax = (Υ + υ)Ts, undeΥ ∈ Z≥1 si υ ∈ R[0,1). Utillizand aproximarea politopica descrisa ın [Gielen et al., 2010], modelul
Regulator predictiv bazat pe functii Lyapunov 27
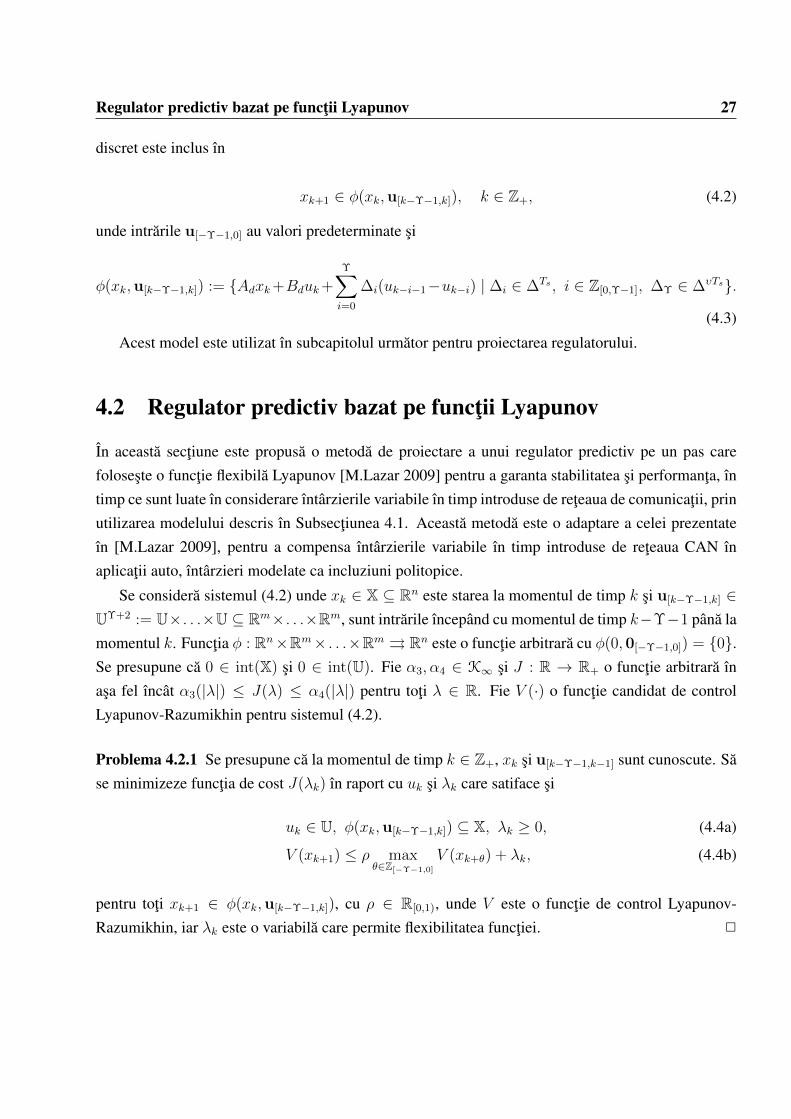
discret este inclus ın
xk+1 ∈ φ(xk,u[k−Υ−1,k]), k ∈ Z+, (4.2)
unde intrarile u[−Υ−1,0] au valori predeterminate si
φ(xk,u[k−Υ−1,k]) := Adxk+Bduk+Υ∑i=0
∆i(uk−i−1−uk−i) | ∆i ∈ ∆Ts , i ∈ Z[0,Υ−1], ∆Υ ∈ ∆υTs.
(4.3)
Acest model este utilizat ın subcapitolul urmator pentru proiectarea regulatorului.
4.2 Regulator predictiv bazat pe functii Lyapunov
In aceasta sectiune este propusa o metoda de proiectare a unui regulator predictiv pe un pas carefoloseste o functie flexibila Lyapunov [M.Lazar 2009] pentru a garanta stabilitatea si performanta, ıntimp ce sunt luate ın considerare ıntarzierile variabile ın timp introduse de reteaua de comunicatii, prinutilizarea modelului descris ın Subsectiunea 4.1. Aceasta metoda este o adaptare a celei prezentateın [M.Lazar 2009], pentru a compensa ıntarzierile variabile ın timp introduse de reteaua CAN ınaplicatii auto, ıntarzieri modelate ca incluziuni politopice.
Se considera sistemul (4.2) unde xk ∈ X ⊆ Rn este starea la momentul de timp k si u[k−Υ−1,k] ∈UΥ+2 := U×. . .×U ⊆ Rm×. . .×Rm, sunt intrarile ıncepand cu momentul de timp k−Υ−1 pana lamomentul k. Functia φ : Rn×Rm× . . .×Rm ⇒ Rn este o functie arbitrara cu φ(0,0[−Υ−1,0]) = 0.Se presupune ca 0 ∈ int(X) si 0 ∈ int(U). Fie α3, α4 ∈ K∞ si J : R → R+ o functie arbitrara ınasa fel ıncat α3(|λ|) ≤ J(λ) ≤ α4(|λ|) pentru toti λ ∈ R. Fie V (·) o functie candidat de controlLyapunov-Razumikhin pentru sistemul (4.2).
Problema 4.2.1 Se presupune ca la momentul de timp k ∈ Z+, xk si u[k−Υ−1,k−1] sunt cunoscute. Sase minimizeze functia de cost J(λk) ın raport cu uk si λk care satiface si
uk ∈ U, φ(xk,u[k−Υ−1,k]) ⊆ X, λk ≥ 0, (4.4a)
V (xk+1) ≤ ρ maxθ∈Z[−Υ−1,0]
V (xk+θ) + λk, (4.4b)
pentru toti xk+1 ∈ φ(xk,u[k−Υ−1,k]), cu ρ ∈ R[0,1), unde V este o functie de control Lyapunov-Razumikhin, iar λk este o variabila care permite flexibilitatea functiei. 2

28 Control predictiv neliniar ın retea
Fie π(xk) := uk ∈ Rm | ∃λk ∈ R s.t. (4.4) holds si fie φcl(xk, π(xk),u[k−Υ−1,k−1]) :=
φ(xk, u,u[k−Υ−1,k−1]) | u ∈ π(xk). Mai mult, fie VΓ := x ∈ Rn | V (x) ≤ Γ pentru oriceΓ ∈ R+. Fie λ∗k optimul din Problema 4.2.1 pentru toti k ∈ Z+.
Teorema 4.2.2 Se presupune ca exista Γ ∈ R>0 astfel ıncat V (·) este o functie de control Lyapunov-Razumikhin pentru conditii initiale ın VΓ pentru sistemul (4.2) si ca X si U sunt marginite. Maimult, se presupune ca Problema 4.2.1 este fezabila pentru toti (x0,u[−Υ−1,0]) ∈ X × UΥ+2 si calimk→∞ λ
∗k = 0. Atunci, incluziunea cu diferente
xk+1 ∈ φcl(xk, π(xk),u[k−Υ−1,k−1]), k ∈ Z+ (4.5)
este asimptotic stabila ın X. 2
Pentru demonstrarea teoremei, trebuie asigurata conditia limk→∞ λ∗k = 0. In urmatoarea lema este
propusa o solutie neconservativa pentru a garanta aceasta conditie.
Lema 4.2.3 Fie Ω ∈ R+ o constanta fixata aleasa a priori si fie ρ ∈ R[0,1). Daca
0 ≤ λk ≤ ρ(λ∗k−1 + ρk−1Ω), ∀k ∈ Z+, (4.6)
atunci limk→∞ λk = 0.
Prin adaugarea la Problema 4.2.1 a restrictiei (4.6), proprietatea limk→∞ λ∗k = 0 este garantata,
ceea ce este suficient pentru stabilitatea asimptotica. Merita mentionat ca aceasta conditie propusapentru limitarea variabilei λ∗k este mai putin conservativa decat solutia prezentata ın [M.Lazar 2009]si [Gielen and M.Lazar, 2009b], care corespunde setarii Ω = 0.
In continuare se arata cum poate fi formulata problema de optimizare ca un program liniar decomplexitate scazuta. Se considera minimizarea functiei de cost
J1(xk,u[k−Υ−1,k], λk) :=JMPC(xk,u[k−Υ−1,k]) + J(λk)
:=‖Qxk+1‖∞ + ‖Ruk‖∞ + ‖Gλk‖∞,(4.7)
unde xk+1 ∈ φ(xk,u[k−Υ−1,k]) si matricile Q si R sunt cunoscute si functia de control Lyapunov-Razumikhin candidat de forma
V (x) = ‖Px‖∞, (4.8)
unde P ∈ Rp×n, p ≥ n, este o matrice ce va fi determinata.
Rezultate de simulare si experimentale 29
Utilizand tehnica de rescriere a inegalitatilor care includ norme infinit ca inegalitati liniare, sepoate formula un program liniar a carui solutie minimizeaza functia de cost J(λ) pentru un orizontegal cu unu, ındeplinind ın acelasi timp toate resctrictiile asupra starilor si comenzii si considerandıntarzierile variabile ın timp introduse de reteaua de comunicatii.
Observand ca doar o solutie fezabila este necesara, ın loc de solutia optima, rezulta ca algoritmulde control poate fi executat ıntr-un timp mai scurt decat algoritmii CP standard, care necesita, deobicei, gasirea unei solutii optime. Acest lucru ınseamna ca regulatorul propus poate fi aplicat pentruclasa proceselor rapide, cu perioade de esantionare mici, ceea ce ınseamna ca regulatorul poate fiutilizat ın aplicatii de timp real.
4.3 Rezultate de simulare si experimentale
Algoritmul de control predictiv propus a fost testat ın Matlab/Simulink si experimental pentru con-trolul unui lant de transmisie a puterii printr-o retea CAN cu scopul de a reduce oscilatiile si de acompensa ıntarzierile introduse de retea.
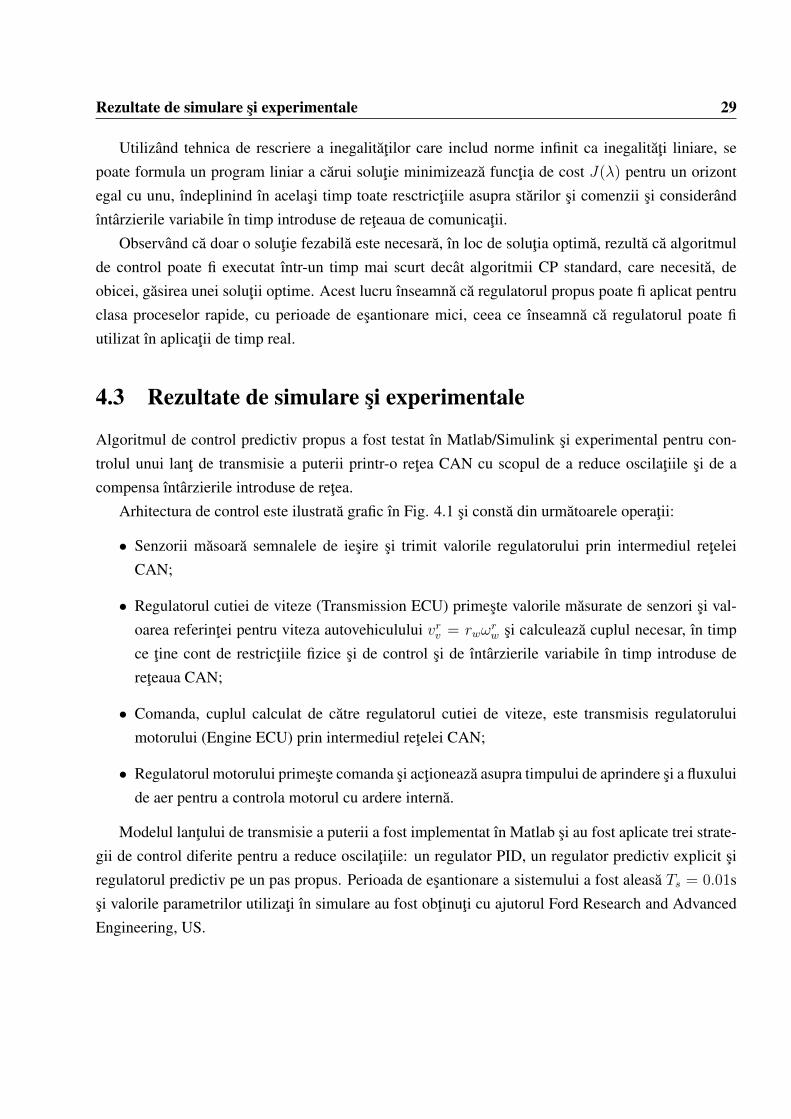
Arhitectura de control este ilustrata grafic ın Fig. 4.1 si consta din urmatoarele operatii:
• Senzorii masoara semnalele de iesire si trimit valorile regulatorului prin intermediul reteleiCAN;
• Regulatorul cutiei de viteze (Transmission ECU) primeste valorile masurate de senzori si val-oarea referintei pentru viteza autovehiculului vrv = rwω
rw si calculeaza cuplul necesar, ın timp
ce tine cont de restrictiile fizice si de control si de ıntarzierile variabile ın timp introduse dereteaua CAN;
• Comanda, cuplul calculat de catre regulatorul cutiei de viteze, este transmisis regulatoruluimotorului (Engine ECU) prin intermediul retelei CAN;
• Regulatorul motorului primeste comanda si actioneaza asupra timpului de aprindere si a fluxuluide aer pentru a controla motorul cu ardere interna.
Modelul lantului de transmisie a puterii a fost implementat ın Matlab si au fost aplicate trei strate-gii de control diferite pentru a reduce oscilatiile: un regulator PID, un regulator predictiv explicit siregulatorul predictiv pe un pas propus. Perioada de esantionare a sistemului a fost aleasa Ts = 0.01ssi valorile parametrilor utilizati ın simulare au fost obtinuti cu ajutorul Ford Research and AdvancedEngineering, US.
30 Control predictiv neliniar ın retea
Engine
totieT
Flexible
driveshaft
Wheels,
Vehicle
loadTdT
dk
dd
Gearbox,
FRG
dT tot
dT
iFh
egfJ
Fh
vJ
Engine
ECU
r
eT
Sensor 1
eω
Sensor 2
wω
r
vvTransmission
ECU
tot
e
w
e wi
ω
ω
θ θ−
r
eT
, ,e e edω θ ,w wω θ
Sensor 3
tote wiθ θ−
CAN 011100001011110001010101 CAN
Figura 4.1: Reprezentare schematica a lantului de transmisie a puterii si arhitectura de control.
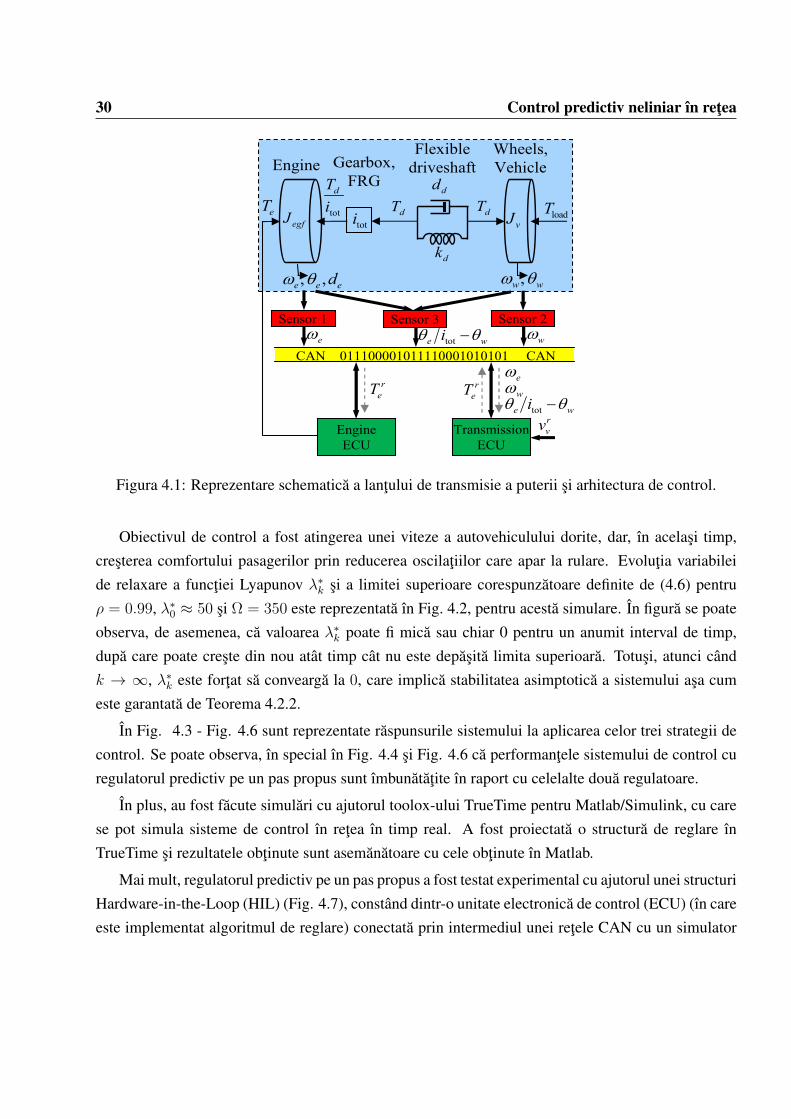
Obiectivul de control a fost atingerea unei viteze a autovehiculului dorite, dar, ın acelasi timp,cresterea comfortului pasagerilor prin reducerea oscilatiilor care apar la rulare. Evolutia variabileide relaxare a functiei Lyapunov λ∗k si a limitei superioare corespunzatoare definite de (4.6) pentruρ = 0.99, λ∗0 ≈ 50 si Ω = 350 este reprezentata ın Fig. 4.2, pentru acesta simulare. In figura se poateobserva, de asemenea, ca valoarea λ∗k poate fi mica sau chiar 0 pentru un anumit interval de timp,dupa care poate creste din nou atat timp cat nu este depasita limita superioara. Totusi, atunci candk → ∞, λ∗k este fortat sa convearga la 0, care implica stabilitatea asimptotica a sistemului asa cumeste garantata de Teorema 4.2.2.
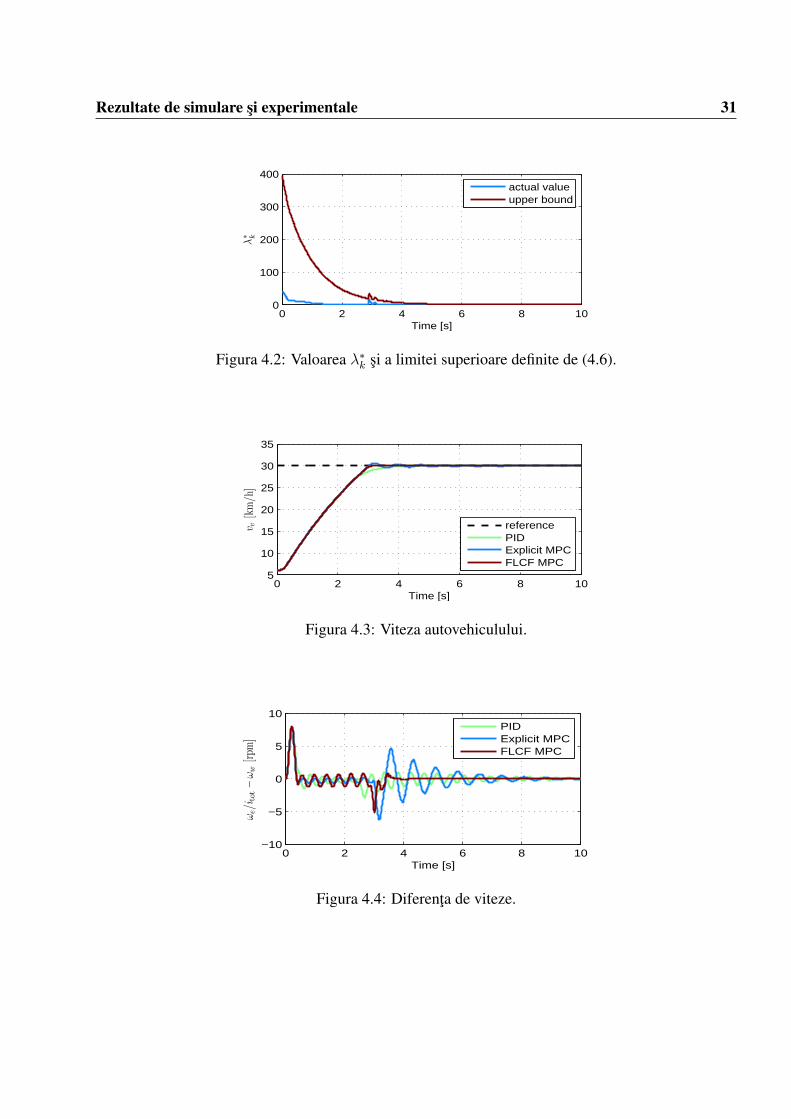
In Fig. 4.3 - Fig. 4.6 sunt reprezentate raspunsurile sistemului la aplicarea celor trei strategii decontrol. Se poate observa, ın special ın Fig. 4.4 si Fig. 4.6 ca performantele sistemului de control curegulatorul predictiv pe un pas propus sunt ımbunatatite ın raport cu celelalte doua regulatoare.
In plus, au fost facute simulari cu ajutorul toolox-ului TrueTime pentru Matlab/Simulink, cu carese pot simula sisteme de control ın retea ın timp real. A fost proiectata o structura de reglare ınTrueTime si rezultatele obtinute sunt asemanatoare cu cele obtinute ın Matlab.
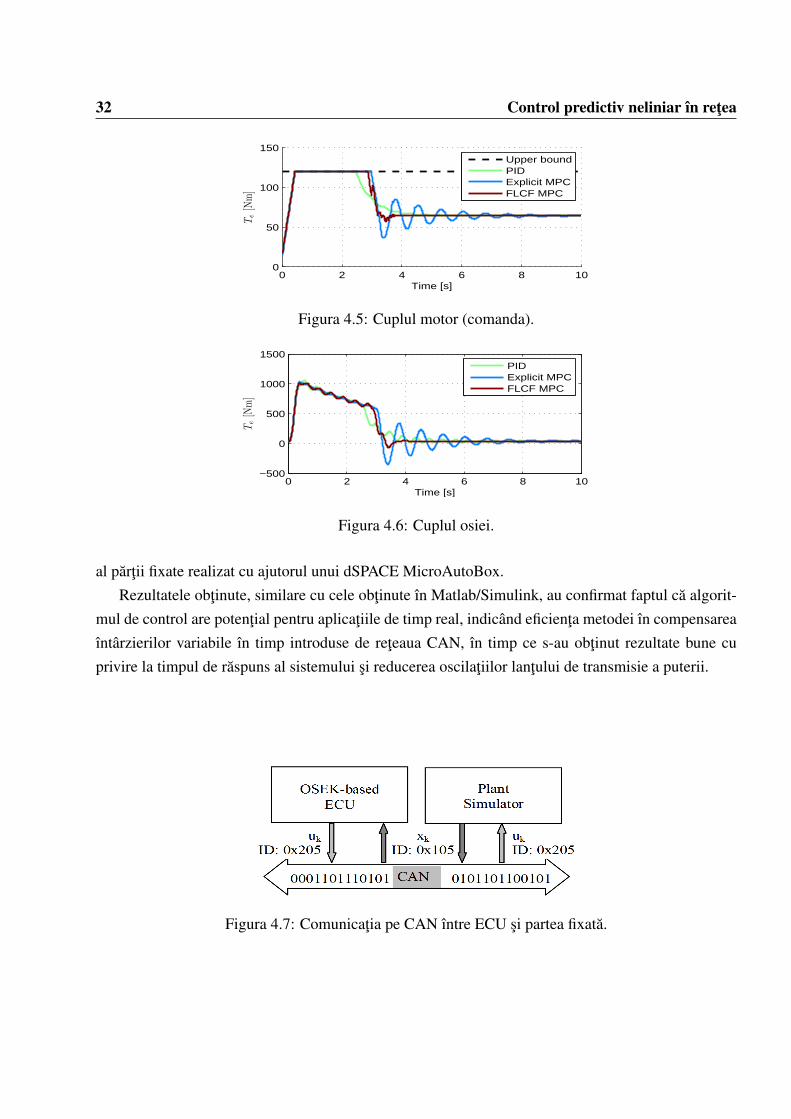
Mai mult, regulatorul predictiv pe un pas propus a fost testat experimental cu ajutorul unei structuriHardware-in-the-Loop (HIL) (Fig. 4.7), constand dintr-o unitate electronica de control (ECU) (ın careeste implementat algoritmul de reglare) conectata prin intermediul unei retele CAN cu un simulator
Rezultate de simulare si experimentale 31
0 2 4 6 8 100
100
200
300
400
Time [s]
λ∗ k
actual valueupper bound
Figura 4.2: Valoarea λ∗k si a limitei superioare definite de (4.6).
0 2 4 6 8 105
10
15
20
25
30
35
Time [s]
v v[km/h
]
referencePIDExplicit MPCFLCF MPC
Figura 4.3: Viteza autovehiculului.
0 2 4 6 8 10−10
−5
0
5
10
Time [s]
ω e/i
tot−ω w
[rpm
]
PIDExplicit MPCFLCF MPC
Figura 4.4: Diferenta de viteze.
32 Control predictiv neliniar ın retea
0 2 4 6 8 100
50
100
150
Time [s]
T e[N
m]
Upper boundPIDExplicit MPCFLCF MPC
Figura 4.5: Cuplul motor (comanda).
0 2 4 6 8 10−500
0
500
1000
1500
Time [s]
T e[N
m]
PIDExplicit MPCFLCF MPC
Figura 4.6: Cuplul osiei.
al partii fixate realizat cu ajutorul unui dSPACE MicroAutoBox.Rezultatele obtinute, similare cu cele obtinute ın Matlab/Simulink, au confirmat faptul ca algorit-
mul de control are potential pentru aplicatiile de timp real, indicand eficienta metodei ın compensareaıntarzierilor variabile ın timp introduse de reteaua CAN, ın timp ce s-au obtinut rezultate bune cuprivire la timpul de raspuns al sistemului si reducerea oscilatiilor lantului de transmisie a puterii.
Figura 4.7: Comunicatia pe CAN ıntre ECU si partea fixata.
Capitolul 5
Control predictiv robust neliniar ın retea
Scopul acestui capitol este de a oferi o metodologie de proiectare a unui regulator care sa asigureperformantele ın bucla ınchisa ale unui proces fizic, ın timp ce se compenseaza ıntarzierile variabileın timp, introduse de reteaua de comunicatii care conecteaza regulatorul cu procesul fizic. In primulrand, eroare cauzata de ıntarzierile variabile ın timp este modelata ca o perturbatie si doua metodenoi de marginire a perturbatiilor sunt propuse. Apoi, este proiectat un regulator predictiv robust peun pas bazat pe functii de control flexibile Lyapunov, care ia ın considerare, ın mod explicit, limiteleperturbatiilor cauzate de ıntarzierile variabile ın timp si garanteaza, de asemenea, stabilitatea intrare-stare a sistemului ıntr-un mod neconservativ. In plus, se arata ca, prin alegerea corespunzatoare afunctiei Lyapunov, algoritmul predictiv de control rezolva un program liniar de complexitate scazutala fiecare perioada de esantionare.
Pentru a ilustra potentialul de aplicare a algoritmului de control propus proceselor rapide, strate-gia este ın primul rand aplicata pentru controlul unui motor de curent continu prin intermediul uneiretele Ethernet si simularile efectuate ın Matlab/Simulink si TrueTime ilustreaza eficienta si robusteteametodei de modelare a ıntarzierilor si a strategiei de control propuse. In al doilea rand, metoda demodelare si strategia de control au fost testate pe un lant de transmisie a puterii la autovehicule con-trolat prin intermediul unei retele CAN, cu scopul amortizarii oscilatiilor, ceea ce este esential pentruımbunatatirea manevrabilitatii si a confortului pasagerilor. Mai multe simulari Matlab/Simulink siTrueTime bazate pe scenarii realiste ilustreaza faptul ca strategia de control propusa poate satisfacerestrictiile legate de performanta si cele fizice. In plus, strategia de control a lantului de transmisie aputerii la autovehicule a fost testata ıntr-o simulare de timp real, rezultatele experimentale aratand castrategia de control predictiv robust propusa poate safisface limitarile stricte cu privire la complexi-tatea de calcul.

34 Control predictiv robust neliniar ın retea
5.1 Modelarea ıntarzierilor de intrare ca perturbatii
Scopul este de a gasi un set marginit W, ın care sa fie incluse toate perturbatiile posibile care pot saapara din cauza ıntarzierilor variabile ın timp, introduse de reteaua de comunicatii, stiind ca marimeade intrare a procesului fizic este marginita. Metoda propusa este diferita de cea prezentata ın [Natori et
al., 2008], ın care, un observator este utilizat pentru a determina diferenta dintre semnalul de comandacalculat si semnalul de comanda care a produs iesirea masurata.
Se considera ca marimea de comanda este marginita astfel
umin ≤ uk ≤ umax, (5.1)
unde umin si umax sunt valorile minime, respectiv maxime, ale marimii de comanda care este furnizataca semnal de intrare procesului fizic. Apoi, perturbatia poate fi marginita astfel [Caruntu and C.Lazar, 2011e,Caruntu and C.Lazar, 2011d]
umin − umax ≤ udk ≤ umax − umin. (5.2)
Mai mult, daca incrementul marimii de control discrete este marginit
−u∆ ≤ ∆uk ≤ u∆, (5.3)
unde ∆uk := uk − uk−1, pentru toti k ∈ Z≥1, cu u0 o valoare predeterminata si u∆ este valoareamaxima a incrementului la fiecare perioada de esantionare k ∈ Z≥1, perturbatia poate fi remarginitaastfel [Caruntu and C.Lazar, 2011e, Caruntu and C.Lazar, 2011d]
−(a+ b)u∆ ≤ udk ≤ (a+ b)u∆, (5.4)
unde a and b reprezinta valoarea maxima a ıntarzierilor de pe calea directa si de pe calea de reactieexprimate ca un numar de perioade de esantionare.
Desi ıntarzierile variabile ın timp cauzeaza o perturbatie variabila ın timp, setul W, care este definitde Bdu
dk, cu udk din (5.2) sau din (5.4), ramane fixat. Astfel, aceasta metoda de modelare este potrivita
pentru utilizarea rezultatelor prezentate ın [M.Lazar and Heemels, 2008], ın care perturbatiile suntluate ın considerare ın mod explicit ın faza de proiectare a regulatorului predictiv.

Modelarea ıntarzierilor de intrare si de iesire ca perturbatii 35
5.2 Modelarea ıntarzierilor de intrare si de iesire ca perturbatii
5.2.1 Intarzieri pe calea directa
Scopul este de a gasi un set marginit Wu, ın care sa fie incluse toate perturbatiile posibile care pot saapara din cauza ıntarzierilor variabile ın timp, introduse de reteaua de comunicatii pe calea directa,stiind ca marimea de intrare a procesului fizic este marginita. Metoda propusa este diferita de ceaprezentata ın [Natori et al., 2008], ın care, un observator este utilizat pentru a determina diferentadintre semnalul de comanda calculat si semnalul de comanda care a produs iesirea masurata.
Se considera ca marimea de comanda este marginita astfel
umin ≤ uk ≤ umax, (5.5)
unde umin si umax sunt valorile minime, respectiv maxime, ale marimii de comanda care este furnizataca semnal de intrare procesului fizic. Apoi, perturbatia poate fi marginita astfel [Caruntu and C.Lazar, 2011e,Caruntu and C.Lazar, 2011d]
umin − umax ≤ udk ≤ umax − umin. (5.6)
Mai mult, daca incrementul marimii de control discrete este marginit
−u∆ ≤ ∆uk ≤ u∆, (5.7)
unde ∆uk := uk − uk−1, pentru toti k ∈ Z≥1, cu u0 o valoare predeterminata si u∆ este valoareamaxima a incrementului la fiecare perioada de esantionare k ∈ Z≥1, perturbatia poate fi remarginitaastfel [Caruntu and C.Lazar, 2011e, Caruntu and C.Lazar, 2011d]
−au∆ ≤ udk ≤ au∆. (5.8)
5.2.2 Intarzieri pe calea de reactie
Scopul este de a gasi un set marginit Wx, ın care sa fie incluse toate perturbatiile posibile care pot saapara din cauza ıntarzierilor variabile ın timp, introduse de reteaua de comunicatii pe calea de reactie,stiind ca marimea de intrare a procesului fizic este marginita.
36 Control predictiv robust neliniar ın retea
Fie modelul discret al unui proces fizic de forma
xk+1 = Adxk +Bd(uk + udk), (5.9)
unde Ad si Bd reprezinta matricile discretizate ale sistemului. Atunci, perturbatia pe calea de reactiepoate fi modelata astfel:
xdk = xk−ak−bk − Abkd xk−ak−bk −bk−1∑i=0
AidBd(uk−ak−i−1 + udk−ak−i−1) =
= (In − Abkd )xk−ak−bk −bk−1∑i=0
AidBd(uk−ak−i−1 + udk−ak−i−1),
(5.10)
unde ak si bk reprezinta valoarea ıntarzierilor de pe calea directa si de pe calea de reactie de la mo-mentul de timp k ∈ Z+ exprimate ca un numar de perioade de esantionare.
xk−ak−bk este cunoscut la momentul de timp k, toate uk−i, i ∈ Z≥1 sunt cunoscute, toate udk−i,i ∈ Z≥1 sunt marginite, ak sunt bk sunt marginite de a si b, respectiv, deci xdk poate fi marginit ın moddinamic la fiecare perioada de esantionare k ∈ Z+.
Acum, (5.9) devinexk+1 = Adxk +Bduk +Bdu
dk + xdk. (5.11)
Desi ıntarzierile variabile ın timp cauzeaza o perturbatie variabila ın timp, seturile Wu, careeste definit de Bdu
dk, cu udk din (5.6) sau din (5.8), si Wx, care este definit de xdk din (5.10) raman
fixate. Astfel, aceasta metoda de modelare este potrivita pentru utilizarea rezultatelor prezentateın [M.Lazar and Heemels, 2008], ın care perturbatiile sunt luate ın considerare ın mod explicit ın fazade proiectare a regulatorului predictiv.
5.3 Regulator predictiv robust bazat pe functii Lyapunov
Recent, o extindere si relaxare a conditiei conventionale Lyapunov a fost propusa ın [M.Lazar 2009],rezultand asa-numitele functii de control flexibile Lyapunov, care ofera o garantie a stabilitatii (sub oipoteza de fezabilitate recursiva), chiar si pentru un orizont de predictie scurt. In aceasta sectiune estepropus un regulator predictiv pe un pas care utilizeaza o functie flexibila Lyapunov [M.Lazar 2009]pentru a asigura stabilitatea si performantele sistemului, ın care perturbatiile sunt luate ın considerareın mod explicit ın faza de proiectare prin utilizarea conceptelor de stabilitare intrare-stare (a se vedea,

Regulator predictiv robust bazat pe functii Lyapunov 37
de exemplu, [Jiang and Wang, 2001]). In plus, se arata ca pentru o anumita alegere a functiei Lya-punov candidat, strategia propusa conduce la un program liniar de complexitate redusa, care poatefi rezolvat eficient ın cadrul intervalului de timp necesar, ın timp ce sunt satisfacute restrictiile siconsiderand ıntarzierile introduse de reteaua de comunicatii, prin utilizarea modelelor perturbatiilordescrise ın subcapitolele 5.1 si 5.2.
Se considera sistemul discret perturbat, neliniar, de forma
xk+1 = φ(xk, uk, wk) := φ(xk, uk) + wk
:= Adxk +Bduk + wk, k ∈ Z+,(5.12)
unde xk ∈ X ⊆ Rn sunt starile, uk ∈ U ⊆ Rm este marimea de control si wk ∈ W ⊆ Rn este operturbatie necunoscuta cauzata de ıntarzierile variabile ın timp introduse de reteaua de comunicatiila momentul de timp k. φ : Rn × Rm × Rn → Rn si φ : Rn × Rm → Rn sunt functii neliniarearbitrare cu φ(0, 0, 0) = 0 si φ(0, 0) = 0. Ad ∈ Rn×n si Bd ∈ Rn. Se presupune ca setul starilorfezabile X, setul intrarilor fezabile U si setul perturbatiilor W sunt poliedre marginite cu interioare cecontin originea.
Se alege off-line o functie de control Lyapunov V (·) pentru sistemul (5.12) fara perturbatii si fieα3 ∈ K∞ si x ∈ X date. La fiecare perioada de esantionare k ∈ Z+ regulatorul predictiv robust pe unpas propus rezolva urmatoarea problema.
Problema 5.3.1 La momentul de timp k ∈ Z+ masoara starea xk si minimizeaza functia de costJ(λ1
k, . . . , λEk , λk) ın raport cu uk, λ1
k, . . . , λEk si λk, tinand cont de restrictiile
uk ∈ U, (Adxk +Bduk) ∈ X, λek ≥ 0, λk ≥ 0, (5.13a)
V (Adxk +Bduk)− V (xk) + α3(‖xk‖) ≤ λk, (5.13b)
V (Adxk +Bduk + we)− V (xk) + α3(‖xk‖)− λek ≤ 0, (5.13c)
pentru toti e = 1, . . . , E. 2
Fie π(xk) := uk ∈ Rm | ∃λk, λek, e ∈ Z[1,E] s.t. (5.13) holds si fie φcl(xk, π(xk), wk) :=
φ(xk, uk, wk) | uk ∈ π(xk) incluziunea cu diferente corespunzatoare systemului (5.12) ın buclaınchisa cu setul solutiilor fezabile obtinute prin rezolvarea Problemei 5.3.1 la fiecare perioada deesantionare k ∈ Z+.
Teorema 5.3.2 Fie α1, α2, α3 ∈ K∞, o functie de control Lyapunov continua si convexa V (·) si o

38 Control predictiv robust neliniar ın retea
functie de cost J(·) date. Se presupune ca Problema 5.3.1 este fezabila pentru toate starile x din X sise presupune ca limk→∞ λ
∗k = 0. Apoi, traiectoriile generate de incluziunea cu diferente
xk+1 ∈ φcl(xk, π(xk), wk), k ∈ Z+, (5.14)
cu starea initiala x0 ∈ X converg ın timp finit la un subset robust invariant pozitiv al lui X, ın careincluziunea cu diferente este stabila intrare-stare pentru perturbatii din W.
Aceasta metoda este o adaptare a celei prezentate ın [M.Lazar and Heemels, 2008], pentru a sepotrivi relaxarii (5.13b) din Problema 5.3.1, adica, λk = 0 pentru toti k ∈ Z+ corespunde problemeiconsiderate ın [M.Lazar and Heemels, 2008].
Pentru demonstrarea teoremei, trebuie asigurata conditia limk→∞ λ∗k = 0. In urmatoarea lema este
propusa o solutie neconservativa pentru a garanta aceasta conditie.
Lema 5.3.3 Fie Ω ∈ R+ o constanta fixata aleasa a priori si fie ρ ∈ R[0,1) si M ∈ Z>0. Daca
0 ≤ λk ≤ ρ1M (λ∗k−1 + ρ
k−1M Ω), ∀k ∈ Z+, (5.15)
atunci limk→∞ λk = 0.
Prin adaugarea la Problema 5.3.1 a restrictiei (5.15), proprietatea limk→∞ λ∗k = 0 este garantata, ceea
ce este suficient pentru stabilitatea asimptotica. Merita mentionat ca aceasta conditie propusa pentrulimitarea variabilei λ∗k este mai putin conservative decat solutia prezentata ın [M.Lazar 2009], carecorespunde setarii Ω = 0.
In continuare se arata cum poate fi formulata problema de optimizare ca un program liniar decomplexitate scazuta.
Se considera minimizarea functiei de cost
J1(xk, uk, λk,λk) := JMPC(xk, uk) + J(λk, λk)
:=‖Px(Adxk +Bduk)‖∞+‖Qxxk‖∞ + ‖Ruk‖∞ + J(λk, λk),
(5.16)
unde costul pe variabilele λk := [λ1k, . . . , λ
Ek ]T si λk este definit ca J(λk, λk) := ‖Λλk‖∞ + |Λλ|,
unde Λ este o matrice de dimensiuni potrivite si Λ ∈ R>0. Costul J(·) este ales asa cum este necesarpentru Problema 5.3.1 si matricile Px, Qx si R sunt de dimensiuni potrivite si functia de control
Controlul lantului de transmisie a puterii ce include ambreiaj prin CAN 39
Lyapunov-Razumikhin candidat de forma
V (x) = ‖Px‖∞, (5.17)
unde P ∈ Rp×n, p ≥ n, este o matrice ce va fi determinata.
Utilizand tehnica de rescriere a inegalitatilor care includ norme infinit ca inegalitati liniare, sepoate formula un program liniar a carui solutie minimizeaza costul J(λ) pentru un orizont egal cuunu, ındeplinind ın acelasi timp toate resctrictiile asupra starilor si comenzii si considerand ıntarzierilevariabile ın timp introduse de reteaua de comunicatii.
Observand ca doar o solutie fezabila este necesara, ın loc de solutia optima, rezulta ca algoritmulde control poate fi executat ıntr-un timp mai scurt decat algoritmii CP standard, care necesita, deobicei, gasirea unei solutii optime. Acest lucru ınseamna ca regulatorul propus poate fi aplicat pentruclasa proceselor rapide, cu perioade de esantionare mici, ceea ce ınseamna ca regulatorul poate fiutilizat ın aplicatii de timp real.
5.4 Controlul lantului de transmisie a puterii ce include ambreiajprin CAN
In aceasta sectiune este proiectat un regulator predictiv robust pe un pas bazat pe functii flexibileLyapunov pentru controlul unui lant de transmisie a puterii la autovehicule cu trei mase inertiale.Mai multe simulari bazate pe scenarii realiste arata ca structura de control propusa poate satisfaceatat restrictiile de performanta si cele fizice, precum si limitarile stricte cu privire la complexitatea decalcul.
Structura de control propusa a fost implementata atat ın Matlab/Simulink, cat si cu ajutorultoolbox-ului TrueTime, precum si pe un stand experimental ın timp real de tipul celui prezentat ınFig. 3.4. Rezultatele obtinute ın cele trei implementari sunt foarte asemanatoare si, din acest motiv,va fi prezentat doar un set de simulari obtinut ın Matlab/Simulink, unde a fost realizata si o comparatiecu un regulator PID pentru ilustrarea performantelor obtinute de regulatorul preditiv robust pe un paspropus.
Rezultatele unei manevre de accelerare-decelerare, ın care referinta pentru viteza autovehicululuise schimba de la 30 km/h la 10 km/h si ınapoi la 30 km/h, sunt prezentate ın Fig. 5.1.
Se poate observa ca regulatorul predictiv robust pe un pas propus are un raspuns usor mai rapid,fara suprareglare, atunci cand se apropie de viteza de referinta. In plus, oscilatiile osiei sunt amor-
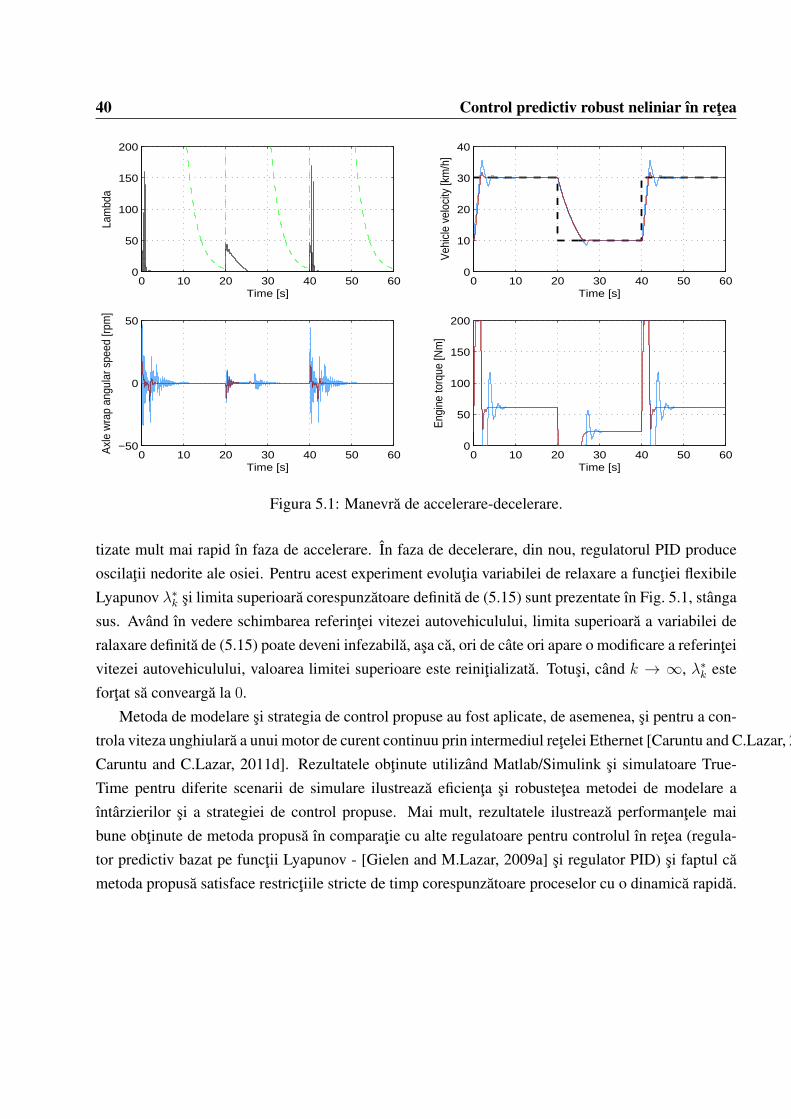
40 Control predictiv robust neliniar ın retea
0 10 20 30 40 50 600
50
100
150
200
Time [s]
Lam
bda
0 10 20 30 40 50 600
10
20
30
40
Time [s]
Veh
icle
vel
ocity
[km
/h]
0 10 20 30 40 50 60−50
0
50
Time [s]
Axl
e w
rap
angu
lar s
peed
[rpm
]
0 10 20 30 40 50 600
50
100
150
200
Time [s]
Eng
ine
torq
ue [N
m]
Figura 5.1: Manevra de accelerare-decelerare.
tizate mult mai rapid ın faza de accelerare. In faza de decelerare, din nou, regulatorul PID produceoscilatii nedorite ale osiei. Pentru acest experiment evolutia variabilei de relaxare a functiei flexibileLyapunov λ∗k si limita superioara corespunzatoare definita de (5.15) sunt prezentate ın Fig. 5.1, stangasus. Avand ın vedere schimbarea referintei vitezei autovehiculului, limita superioara a variabilei deralaxare definita de (5.15) poate deveni infezabila, asa ca, ori de cate ori apare o modificare a referinteivitezei autovehiculului, valoarea limitei superioare este reinitializata. Totusi, cand k → ∞, λ∗k estefortat sa convearga la 0.
Metoda de modelare si strategia de control propuse au fost aplicate, de asemenea, si pentru a con-trola viteza unghiulara a unui motor de curent continuu prin intermediul retelei Ethernet [Caruntu and C.Lazar, 2011e,Caruntu and C.Lazar, 2011d]. Rezultatele obtinute utilizand Matlab/Simulink si simulatoare True-Time pentru diferite scenarii de simulare ilustreaza eficienta si robustetea metodei de modelare aıntarzierilor si a strategiei de control propuse. Mai mult, rezultatele ilustreaza performantele maibune obtinute de metoda propusa ın comparatie cu alte regulatoare pentru controlul ın retea (regula-tor predictiv bazat pe functii Lyapunov - [Gielen and M.Lazar, 2009a] si regulator PID) si faptul cametoda propusa satisface restrictiile stricte de timp corespunzatoare proceselor cu o dinamica rapida.
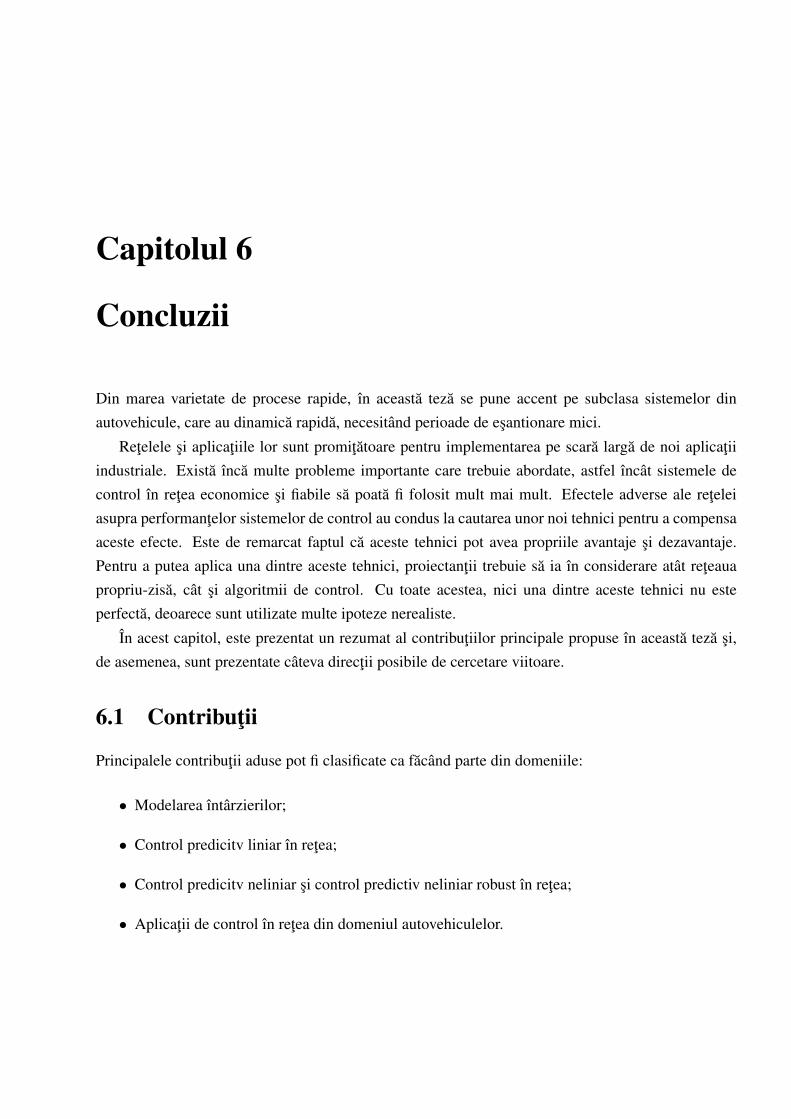
Capitolul 6
Concluzii
Din marea varietate de procese rapide, ın aceasta teza se pune accent pe subclasa sistemelor dinautovehicule, care au dinamica rapida, necesitand perioade de esantionare mici.
Retelele si aplicatiile lor sunt promitatoare pentru implementarea pe scara larga de noi aplicatiiindustriale. Exista ınca multe probleme importante care trebuie abordate, astfel ıncat sistemele decontrol ın retea economice si fiabile sa poata fi folosit mult mai mult. Efectele adverse ale reteleiasupra performantelor sistemelor de control au condus la cautarea unor noi tehnici pentru a compensaaceste efecte. Este de remarcat faptul ca aceste tehnici pot avea propriile avantaje si dezavantaje.Pentru a putea aplica una dintre aceste tehnici, proiectantii trebuie sa ia ın considerare atat reteauapropriu-zisa, cat si algoritmii de control. Cu toate acestea, nici una dintre aceste tehnici nu esteperfecta, deoarece sunt utilizate multe ipoteze nerealiste.
In acest capitol, este prezentat un rezumat al contributiilor principale propuse ın aceasta teza si,de asemenea, sunt prezentate cateva directii posibile de cercetare viitoare.
6.1 Contributii
Principalele contributii aduse pot fi clasificate ca facand parte din domeniile:
• Modelarea ıntarzierilor;
• Control predicitv liniar ın retea;
• Control predicitv neliniar si control predictiv neliniar robust ın retea;
• Aplicatii de control ın retea din domeniul autovehiculelor.
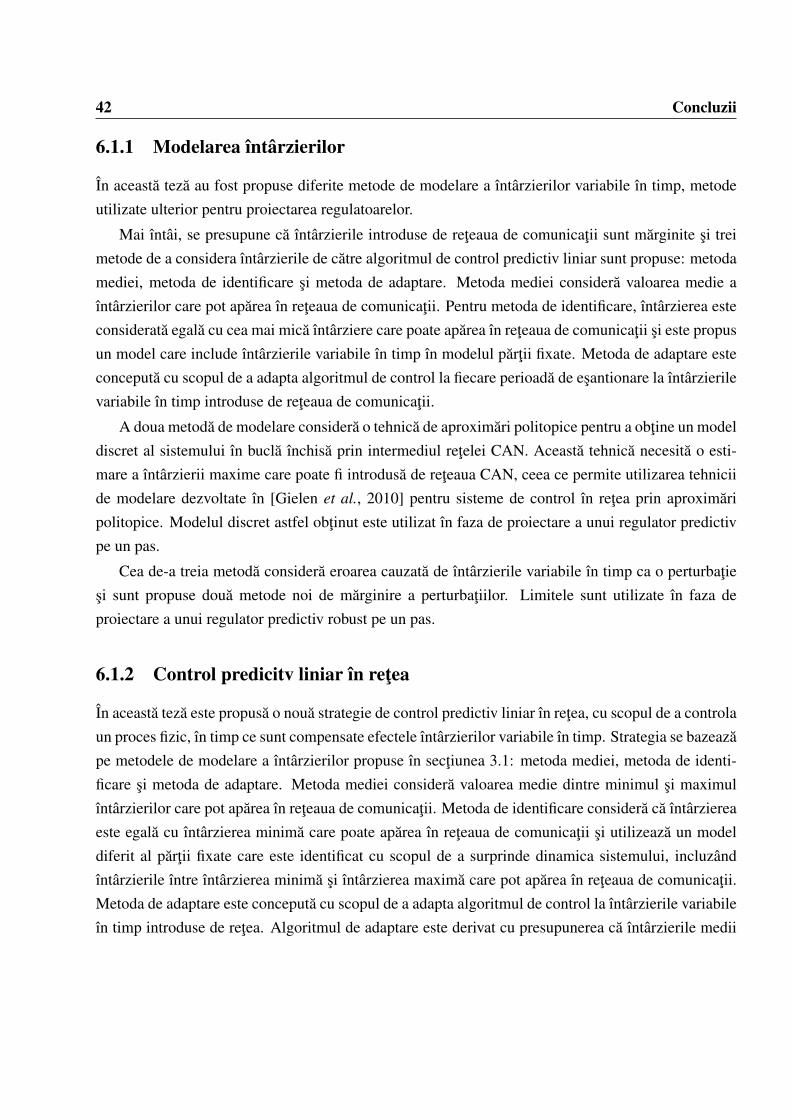
42 Concluzii
6.1.1 Modelarea ıntarzierilor
In aceasta teza au fost propuse diferite metode de modelare a ıntarzierilor variabile ın timp, metodeutilizate ulterior pentru proiectarea regulatoarelor.
Mai ıntai, se presupune ca ıntarzierile introduse de reteaua de comunicatii sunt marginite si treimetode de a considera ıntarzierile de catre algoritmul de control predictiv liniar sunt propuse: metodamediei, metoda de identificare si metoda de adaptare. Metoda mediei considera valoarea medie aıntarzierilor care pot aparea ın reteaua de comunicatii. Pentru metoda de identificare, ıntarzierea esteconsiderata egala cu cea mai mica ıntarziere care poate aparea ın reteaua de comunicatii si este propusun model care include ıntarzierile variabile ın timp ın modelul partii fixate. Metoda de adaptare esteconceputa cu scopul de a adapta algoritmul de control la fiecare perioada de esantionare la ıntarzierilevariabile ın timp introduse de reteaua de comunicatii.
A doua metoda de modelare considera o tehnica de aproximari politopice pentru a obtine un modeldiscret al sistemului ın bucla ınchisa prin intermediul retelei CAN. Aceasta tehnica necesita o esti-mare a ıntarzierii maxime care poate fi introdusa de reteaua CAN, ceea ce permite utilizarea tehniciide modelare dezvoltate ın [Gielen et al., 2010] pentru sisteme de control ın retea prin aproximaripolitopice. Modelul discret astfel obtinut este utilizat ın faza de proiectare a unui regulator predictivpe un pas.
Cea de-a treia metoda considera eroarea cauzata de ıntarzierile variabile ın timp ca o perturbatiesi sunt propuse doua metode noi de marginire a perturbatiilor. Limitele sunt utilizate ın faza deproiectare a unui regulator predictiv robust pe un pas.
6.1.2 Control predicitv liniar ın retea
In aceasta teza este propusa o noua strategie de control predictiv liniar ın retea, cu scopul de a controlaun proces fizic, ın timp ce sunt compensate efectele ıntarzierilor variabile ın timp. Strategia se bazeazape metodele de modelare a ıntarzierilor propuse ın sectiunea 3.1: metoda mediei, metoda de identi-ficare si metoda de adaptare. Metoda mediei considera valoarea medie dintre minimul si maximulıntarzierilor care pot aparea ın reteaua de comunicatii. Metoda de identificare considera ca ıntarziereaeste egala cu ıntarzierea minima care poate aparea ın reteaua de comunicatii si utilizeaza un modeldiferit al partii fixate care este identificat cu scopul de a surprinde dinamica sistemului, incluzandıntarzierile ıntre ıntarzierea minima si ıntarzierea maxima care pot aparea ın reteaua de comunicatii.Metoda de adaptare este conceputa cu scopul de a adapta algoritmul de control la ıntarzierile variabileın timp introduse de retea. Algoritmul de adaptare este derivat cu presupunerea ca ıntarzierile medii
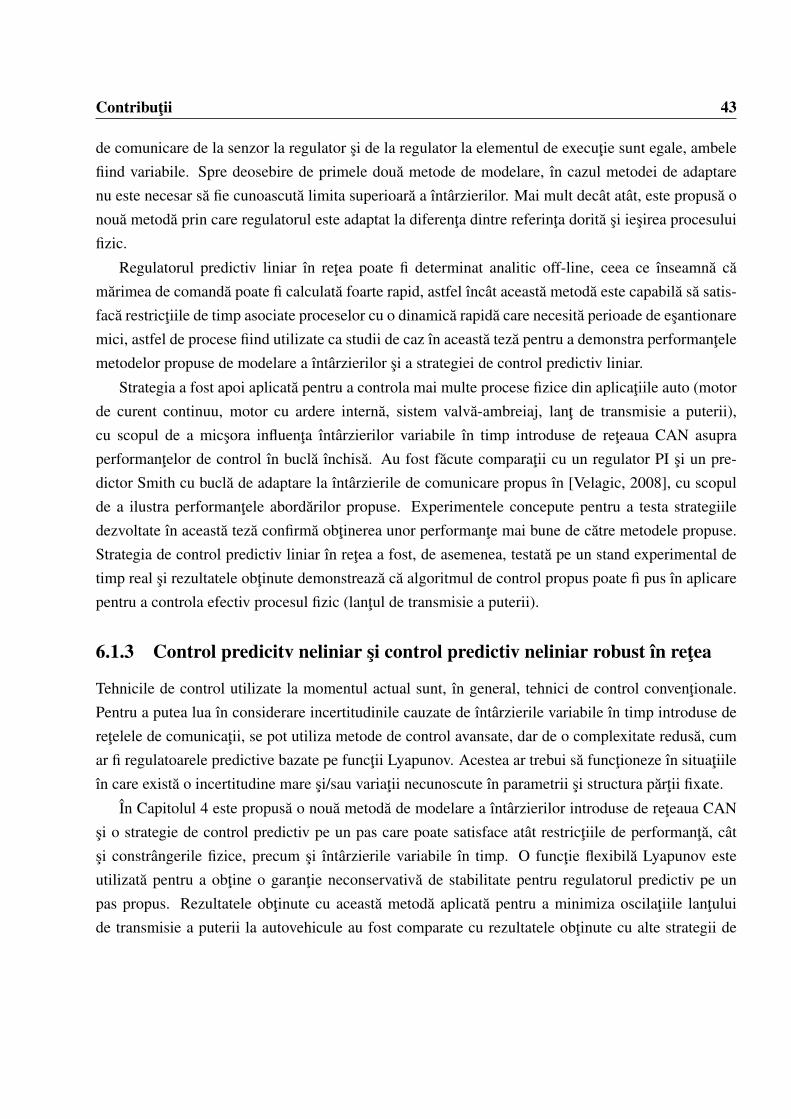
Contributii 43
de comunicare de la senzor la regulator si de la regulator la elementul de executie sunt egale, ambelefiind variabile. Spre deosebire de primele doua metode de modelare, ın cazul metodei de adaptarenu este necesar sa fie cunoascuta limita superioara a ıntarzierilor. Mai mult decat atat, este propusa onoua metoda prin care regulatorul este adaptat la diferenta dintre referinta dorita si iesirea procesuluifizic.
Regulatorul predictiv liniar ın retea poate fi determinat analitic off-line, ceea ce ınseamna camarimea de comanda poate fi calculata foarte rapid, astfel ıncat aceasta metoda este capabila sa satis-faca restrictiile de timp asociate proceselor cu o dinamica rapida care necesita perioade de esantionaremici, astfel de procese fiind utilizate ca studii de caz ın aceasta teza pentru a demonstra performantelemetodelor propuse de modelare a ıntarzierilor si a strategiei de control predictiv liniar.
Strategia a fost apoi aplicata pentru a controla mai multe procese fizice din aplicatiile auto (motorde curent continuu, motor cu ardere interna, sistem valva-ambreiaj, lant de transmisie a puterii),cu scopul de a micsora influenta ıntarzierilor variabile ın timp introduse de reteaua CAN asupraperformantelor de control ın bucla ınchisa. Au fost facute comparatii cu un regulator PI si un pre-dictor Smith cu bucla de adaptare la ıntarzierile de comunicare propus ın [Velagic, 2008], cu scopulde a ilustra performantele abordarilor propuse. Experimentele concepute pentru a testa strategiiledezvoltate ın aceasta teza confirma obtinerea unor performante mai bune de catre metodele propuse.Strategia de control predictiv liniar ın retea a fost, de asemenea, testata pe un stand experimental detimp real si rezultatele obtinute demonstreaza ca algoritmul de control propus poate fi pus ın aplicarepentru a controla efectiv procesul fizic (lantul de transmisie a puterii).
6.1.3 Control predicitv neliniar si control predictiv neliniar robust ın retea
Tehnicile de control utilizate la momentul actual sunt, ın general, tehnici de control conventionale.Pentru a putea lua ın considerare incertitudinile cauzate de ıntarzierile variabile ın timp introduse deretelele de comunicatii, se pot utiliza metode de control avansate, dar de o complexitate redusa, cumar fi regulatoarele predictive bazate pe functii Lyapunov. Acestea ar trebui sa functioneze ın situatiileın care exista o incertitudine mare si/sau variatii necunoscute ın parametrii si structura partii fixate.
In Capitolul 4 este propusa o noua metoda de modelare a ıntarzierilor introduse de reteaua CANsi o strategie de control predictiv pe un pas care poate satisface atat restrictiile de performanta, catsi constrangerile fizice, precum si ıntarzierile variabile ın timp. O functie flexibila Lyapunov esteutilizata pentru a obtine o garantie neconservativa de stabilitate pentru regulatorul predictiv pe unpas propus. Rezultatele obtinute cu aceasta metoda aplicata pentru a minimiza oscilatiile lantuluide transmisie a puterii la autovehicule au fost comparate cu rezultatele obtinute cu alte strategii de
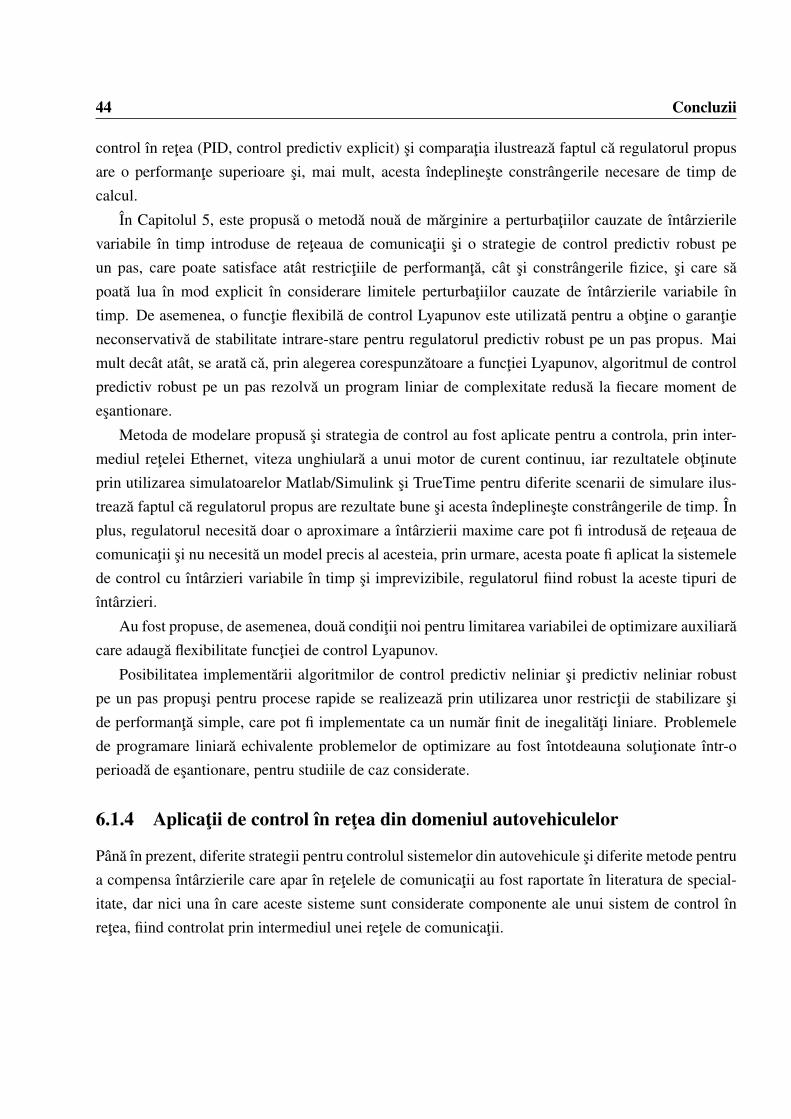
44 Concluzii
control ın retea (PID, control predictiv explicit) si comparatia ilustreaza faptul ca regulatorul propusare o performante superioare si, mai mult, acesta ındeplineste constrangerile necesare de timp decalcul.
In Capitolul 5, este propusa o metoda noua de marginire a perturbatiilor cauzate de ıntarzierilevariabile ın timp introduse de reteaua de comunicatii si o strategie de control predictiv robust peun pas, care poate satisface atat restrictiile de performanta, cat si constrangerile fizice, si care sapoata lua ın mod explicit ın considerare limitele perturbatiilor cauzate de ıntarzierile variabile ıntimp. De asemenea, o functie flexibila de control Lyapunov este utilizata pentru a obtine o garantieneconservativa de stabilitate intrare-stare pentru regulatorul predictiv robust pe un pas propus. Maimult decat atat, se arata ca, prin alegerea corespunzatoare a functiei Lyapunov, algoritmul de controlpredictiv robust pe un pas rezolva un program liniar de complexitate redusa la fiecare moment deesantionare.
Metoda de modelare propusa si strategia de control au fost aplicate pentru a controla, prin inter-mediul retelei Ethernet, viteza unghiulara a unui motor de curent continuu, iar rezultatele obtinuteprin utilizarea simulatoarelor Matlab/Simulink si TrueTime pentru diferite scenarii de simulare ilus-treaza faptul ca regulatorul propus are rezultate bune si acesta ındeplineste constrangerile de timp. Inplus, regulatorul necesita doar o aproximare a ıntarzierii maxime care pot fi introdusa de reteaua decomunicatii si nu necesita un model precis al acesteia, prin urmare, acesta poate fi aplicat la sistemelede control cu ıntarzieri variabile ın timp si imprevizibile, regulatorul fiind robust la aceste tipuri deıntarzieri.
Au fost propuse, de asemenea, doua conditii noi pentru limitarea variabilei de optimizare auxiliaracare adauga flexibilitate functiei de control Lyapunov.
Posibilitatea implementarii algoritmilor de control predictiv neliniar si predictiv neliniar robustpe un pas propusi pentru procese rapide se realizeaza prin utilizarea unor restrictii de stabilizare side performanta simple, care pot fi implementate ca un numar finit de inegalitati liniare. Problemelede programare liniara echivalente problemelor de optimizare au fost ıntotdeauna solutionate ıntr-operioada de esantionare, pentru studiile de caz considerate.
6.1.4 Aplicatii de control ın retea din domeniul autovehiculelor
Pana ın prezent, diferite strategii pentru controlul sistemelor din autovehicule si diferite metode pentrua compensa ıntarzierile care apar ın retelele de comunicatii au fost raportate ın literatura de special-itate, dar nici una ın care aceste sisteme sunt considerate componente ale unui sistem de control ınretea, fiind controlat prin intermediul unei retele de comunicatii.
Contributii 45
Strategia de control predictiv liniar ın retea propusa a fost aplicata pentru a controla mai multeprocese fizice din aplicatiile auto (motor de curent continuu, motor cu ardere interna, sistem valva-ambreiaj, lant de transmisie a puterii), precum si pentru a reduce influenta ıntarzierilor variabile ıntimp introduse de retelele de comunicatii cu privire la performantele de control. Performanta strate-giei propuse este demonstrata de rezultatele de simulare si comparatiile corespunzatoare dovedescimportanta acestei metode.
Strategia de control predictiv neliniar pe un pas propusa ın Capitolul 4 a fost aplicata pentrua minimiza oscilatiile lantului de transmisie a puterii la autovehicule, ın timp ce se compenseazaıntarzierile variabile ın timp introduse de reteaua CAN, utilizand tehnica de modelare propusa ınsectiunea 4.1.
Mai multe simulari realizate ın TrueTime definite ın colaborare cu Ford Research and AdvancedEngineering, SUA valideaza regulatorul predictiv neliniar pe un pas propus, indicand faptul ca strate-gia dezvoltata are potentialul de a ındeplini constrangerile de timp real. Rezultatele de simulareindica, de asemenea, faptul ca strategia propusa poate avea performante mai bune decat alte tipuri deregulatoare, cum ar fi PID sau regulator predictiv explicit.
In plus, strategia de control predictiv a fost verificata experimental cu ajutorul unui stand de tipHIL, constand dintr-o unitate de electronica control (care implementeaza regulatorul) legate printr-o magistraa CAN cu un emulator al partii fixate realizat de dSPACE MicroAutoBox. Rezultateleexperimentale ilustreaza faptul ca strategia propusa ındeplineste constrangerile de timp necesare ınaplicatiile de timp real.
Strategia de control predictiv robust neliniar a fost aplicata pentru a controla un motor de curentcontinuu prin intermediul unei retele Ethernet si simularile Matlab/Simulink si TrueTime ilustreazaeficienta si robustetea metodei de modelare a ıntarzierilor si a strategiei de control propuse. In plus,metoda de modelare si strategia de control propuse au fost testate pe un lant de transmisie a puterii laautovehicule controlat prin intermediul unei retele CAN, cu scopul amortizarii oscilatiilor acestuia,ceea ce este esential ın ımbunatatirea manevrabilitatii si a confortului pasagerilor. Mai multe simulariMatlab/Simulink si TrueTime bazate pe scenarii realiste ilustreaza ca strategia de control propusapoate satisface restrictiile de performanta si constrangerile fizice. In plus, strategia de control a fosttestata pe un stand experimental de timp real, rezultatele experimentale ilustrand faptul ca strategiade control poate satisface limitarile stricte cu privire la complexitatea de calcul.
Ultima contributie se refera la dezvoltarea unui model pe stare mai precis al lantului de trans-misie a puterii la autovehicule cu trei inertii, ın care este considerata atat flexibilitatea osiilor, cat siflexibilitatea ambreiajului cu patru moduri de functionare.

46 Concluzii
6.2 Directii viitoare de cercetare
Studiul de cercetare prezentat ın aceasta teza ofera mai multe directii interesante de cercetare, caresunt descrise pe scurt ın urmatoarele:
• In Capitolul 3, Capitolul 4 si Capitolul 5, sunt propuse mai multe tehnici de modelare pentruıntarzierile variabile ın timp introduse de reteaua de comunicatii, dar se presupune ca acesteıntarzieri sunt marginite si limitele sunt utilizate ın proiectarea regulatorului. Totusi, pen-tru metoda de adaptare, conceputa cu scopul de a adapta algoritmul de control la ıntarzierilevariabile ın timp introduse de retea, nu este nevoie sa se cunoasca exact limita superioara aıntarzierilor, ci doar o aproximare a acesteia. Intrebarile ramase sunt: cum se pot anticipaıntarzierile introduse de reteaua de comunicatii fara a utiliza un model al acestora si cum sepoate proiecta un regulator fara a cunoaste limitele ıntarzierilor variabile ın timp ?
• In Capitolul 4 sunt luate ın considerare doar ıntarzierile de intrare, dar, este bine cunoscut faptulca ın sistemele de control ın retea sunt prezente si ıntarzieri de iesire. Deci, sarcina va fi sa seia ın considerare si ıntarzierile de iesire ın utilizarea metodei aproximarilor politopice propuse.
• Metoda de identificare propusa ın Capitolul 3, care utilizeaza un model diferit al partii fixatecare este identificat cu scopul de a surprinde dinamica sistemului, inclusiv ıntarzierile ıntreıntarzierea minima si ıntarzierea maxima care pot aparea ın reteaua de comunicatii, ar putea fiextins la modelele pe stare, care pot fi utilizate apoi de strategia de control predictiv neliniardescrisa ın Capitolul 4.
• Exista numeroase imperfectiuni si restrictii introduse de retelele de comunicatii ce sunt ımpartiteın cinci categorii ın [Heemels et al., 2010], dar, de obicei, ın literatura de specialitate se con-sidera doar unele dintre acestea ın analiza sistemelor de control ın retea. In aceasta teza au fostluate ın considerare doar ıntarzierile variabile ın timp introduse de reteaua de comunicatii, ınproiectarea regulatorului. Ar fi util, de asemenea, sa se ia ın considerare ın proiectarea regu-latorului si pierderile de pachete de date, erorile de cuantizare, perioade de esantionare si detransmisie variable si ıncarcarea retelei de comunicatii (comunicare limitata).
• Desi studiile de caz luate ın considerare ın aceasta teza sunt, ın principal, procese rapide dinaplicatiile auto, rezultatele teoretice prezentate ar putea fi aplicate pentru controlul ın retea al al-tor aplicatii din domenii de activitate diferite: aeronautica, instalatii automatizate de productie,vehicule militare comandate de la distanta, telerobotica, telemedicina.

Directii viitoare de cercetare 47
• Protocoalele de comunicatie utilizate pentru simularile si experimentele ilustrate ın aceasta tezasunt CAN si Ethernet. De asemenea, rezultatele teoretice prezentate ar putea fi aplicate pen-tru controlul proceselor rapide prin intermediul altor protocoale de comunicatie si chiar prinintermediul retelelor wireless.

48 Concluzii

References
[Anwar, 2007] S. Anwar. Predictive Yaw Stability Control of a Brake-by-Wire Equipped Vehicle via
Eddy Current Braking. In American Control Conference, New York, USA, 2007. 11
[Balau, Caruntu et al., 2009a] A. E. Balau, C. F. Caruntu, C. Lazar and D. I. Patrascu. New Model
for Predictive Control of an Electro-Hydraulic Actuated Clutch. In 8th International Con-ference Fuel Economy, Safety and Reliability of Motor Vehicles, volume 1, pages 463–472,Bucuresti, Romania, 2009. 5
[Balau, Caruntu et al., 2009b] A. E. Balau, C. F. Caruntu, D. I. Patrascu, C. Lazar, M. H. Matcovschiand O. Pastravanu. Modeling of a Pressure Reducing Valve Actuator for Automotive Appli-
cations. In 18th IEEE International Conference on Control Applications, Part of 2009 IEEEMulti-conference on Systems and Control, Saint Petersburg, Russia, 2009. 4
[Balau, Caruntu and C.Lazar, 2011a] A. E. Balau, C. F. Caruntu and C. Lazar. Driveline oscillations
modeling and control. In 18th International Conference on Control Systems and ComputerScience, pages 332–338, Bucuresti, Romania, 2011. 6
[Balau, Caruntu and C.Lazar, 2011b] A. E. Balau, C. F. Caruntu and C. Lazar. Simulation and Con-
trol of an Electro-Hydraulic Actuated Clutch. Mechanical Systems and Signal Processing,vol. 25, pages 1911–1922, 2011. 5, 14
[Bernardini et al., 2010] D. Bernardini, M. C. F. Donkers, A. Bemporad and W. P. M. H. Heemels. A
Model Predictive Control Approach for Stochastic Networked Control Systems. In 2nd IFACWorkshop on Estimation and Control of Networked Systems, Annecy, France, 2010. 3, 8
[Braescu, Caruntu et al., 2011] F. C. Braescu, C. F. Caruntu, L. Ferariu and C. Lazar. OSEK Based
Embedded Networked Controller Designed to Handle Communication Delays. In 2nd EasternEuropean Regional Conference on the Engineering of Computer Based Systems, pages 71–77, Bratislava, Slovakia, 2011. 5
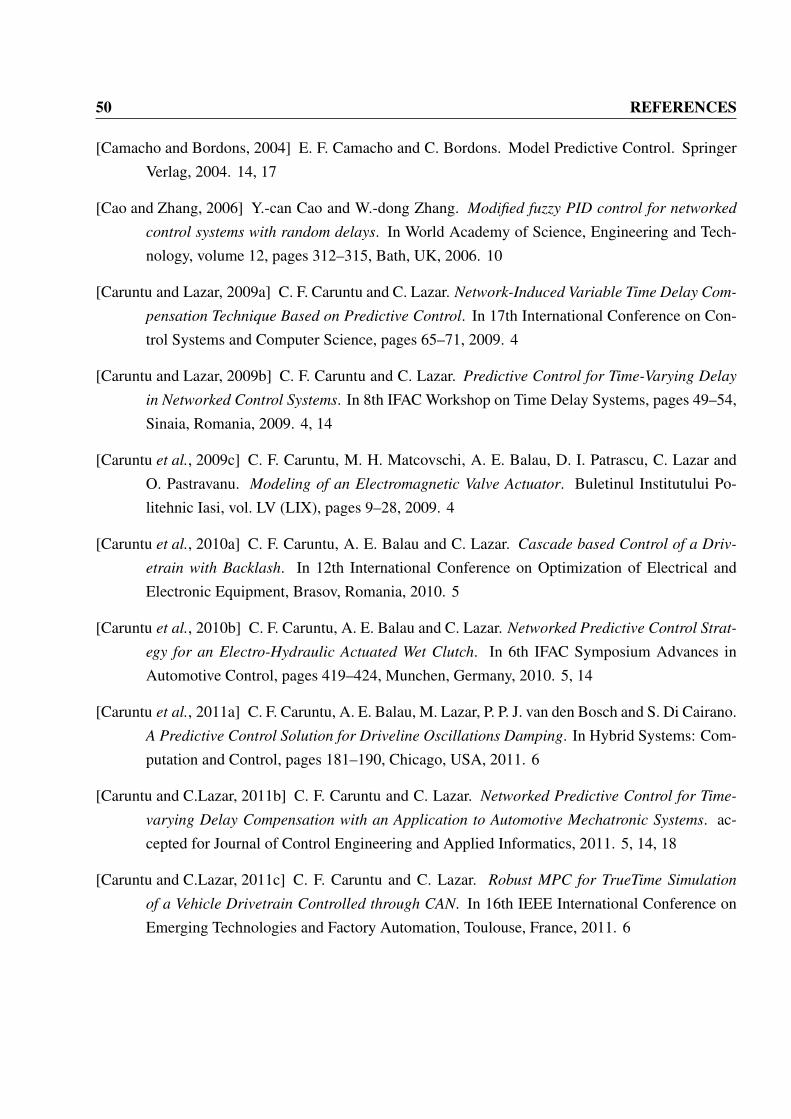
50 REFERENCES
[Camacho and Bordons, 2004] E. F. Camacho and C. Bordons. Model Predictive Control. SpringerVerlag, 2004. 14, 17
[Cao and Zhang, 2006] Y.-can Cao and W.-dong Zhang. Modified fuzzy PID control for networked
control systems with random delays. In World Academy of Science, Engineering and Tech-nology, volume 12, pages 312–315, Bath, UK, 2006. 10
[Caruntu and Lazar, 2009a] C. F. Caruntu and C. Lazar. Network-Induced Variable Time Delay Com-
pensation Technique Based on Predictive Control. In 17th International Conference on Con-trol Systems and Computer Science, pages 65–71, 2009. 4
[Caruntu and Lazar, 2009b] C. F. Caruntu and C. Lazar. Predictive Control for Time-Varying Delay
in Networked Control Systems. In 8th IFAC Workshop on Time Delay Systems, pages 49–54,Sinaia, Romania, 2009. 4, 14
[Caruntu et al., 2009c] C. F. Caruntu, M. H. Matcovschi, A. E. Balau, D. I. Patrascu, C. Lazar andO. Pastravanu. Modeling of an Electromagnetic Valve Actuator. Buletinul Institutului Po-litehnic Iasi, vol. LV (LIX), pages 9–28, 2009. 4
[Caruntu et al., 2010a] C. F. Caruntu, A. E. Balau and C. Lazar. Cascade based Control of a Driv-
etrain with Backlash. In 12th International Conference on Optimization of Electrical andElectronic Equipment, Brasov, Romania, 2010. 5
[Caruntu et al., 2010b] C. F. Caruntu, A. E. Balau and C. Lazar. Networked Predictive Control Strat-
egy for an Electro-Hydraulic Actuated Wet Clutch. In 6th IFAC Symposium Advances inAutomotive Control, pages 419–424, Munchen, Germany, 2010. 5, 14
[Caruntu et al., 2011a] C. F. Caruntu, A. E. Balau, M. Lazar, P. P. J. van den Bosch and S. Di Cairano.A Predictive Control Solution for Driveline Oscillations Damping. In Hybrid Systems: Com-putation and Control, pages 181–190, Chicago, USA, 2011. 6
[Caruntu and C.Lazar, 2011b] C. F. Caruntu and C. Lazar. Networked Predictive Control for Time-
varying Delay Compensation with an Application to Automotive Mechatronic Systems. ac-cepted for Journal of Control Engineering and Applied Informatics, 2011. 5, 14, 18
[Caruntu and C.Lazar, 2011c] C. F. Caruntu and C. Lazar. Robust MPC for TrueTime Simulation
of a Vehicle Drivetrain Controlled through CAN. In 16th IEEE International Conference onEmerging Technologies and Factory Automation, Toulouse, France, 2011. 6
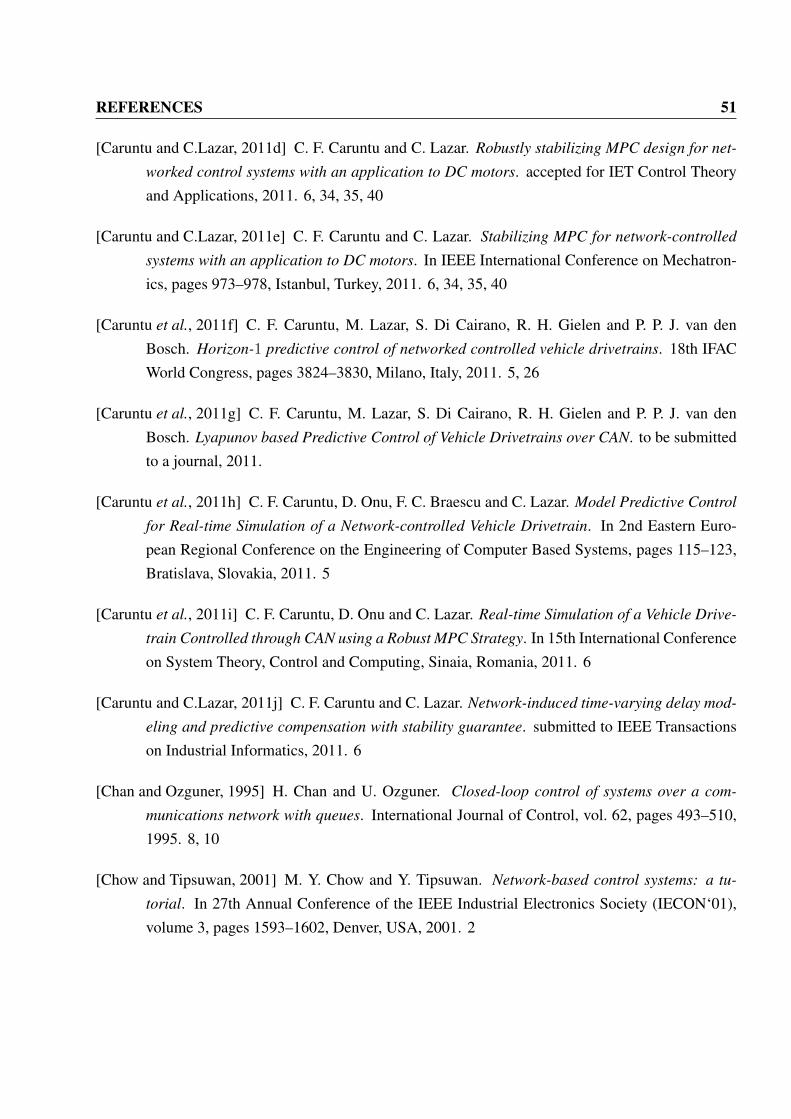
REFERENCES 51
[Caruntu and C.Lazar, 2011d] C. F. Caruntu and C. Lazar. Robustly stabilizing MPC design for net-
worked control systems with an application to DC motors. accepted for IET Control Theoryand Applications, 2011. 6, 34, 35, 40
[Caruntu and C.Lazar, 2011e] C. F. Caruntu and C. Lazar. Stabilizing MPC for network-controlled
systems with an application to DC motors. In IEEE International Conference on Mechatron-ics, pages 973–978, Istanbul, Turkey, 2011. 6, 34, 35, 40
[Caruntu et al., 2011f] C. F. Caruntu, M. Lazar, S. Di Cairano, R. H. Gielen and P. P. J. van denBosch. Horizon-1 predictive control of networked controlled vehicle drivetrains. 18th IFACWorld Congress, pages 3824–3830, Milano, Italy, 2011. 5, 26
[Caruntu et al., 2011g] C. F. Caruntu, M. Lazar, S. Di Cairano, R. H. Gielen and P. P. J. van denBosch. Lyapunov based Predictive Control of Vehicle Drivetrains over CAN. to be submittedto a journal, 2011.
[Caruntu et al., 2011h] C. F. Caruntu, D. Onu, F. C. Braescu and C. Lazar. Model Predictive Control
for Real-time Simulation of a Network-controlled Vehicle Drivetrain. In 2nd Eastern Euro-pean Regional Conference on the Engineering of Computer Based Systems, pages 115–123,Bratislava, Slovakia, 2011. 5
[Caruntu et al., 2011i] C. F. Caruntu, D. Onu and C. Lazar. Real-time Simulation of a Vehicle Drive-
train Controlled through CAN using a Robust MPC Strategy. In 15th International Conferenceon System Theory, Control and Computing, Sinaia, Romania, 2011. 6
[Caruntu and C.Lazar, 2011j] C. F. Caruntu and C. Lazar. Network-induced time-varying delay mod-
eling and predictive compensation with stability guarantee. submitted to IEEE Transactionson Industrial Informatics, 2011. 6
[Chan and Ozguner, 1995] H. Chan and U. Ozguner. Closed-loop control of systems over a com-
munications network with queues. International Journal of Control, vol. 62, pages 493–510,1995. 8, 10
[Chow and Tipsuwan, 2001] M. Y. Chow and Y. Tipsuwan. Network-based control systems: a tu-
torial. In 27th Annual Conference of the IEEE Industrial Electronics Society (IECON‘01),volume 3, pages 1593–1602, Denver, USA, 2001. 2
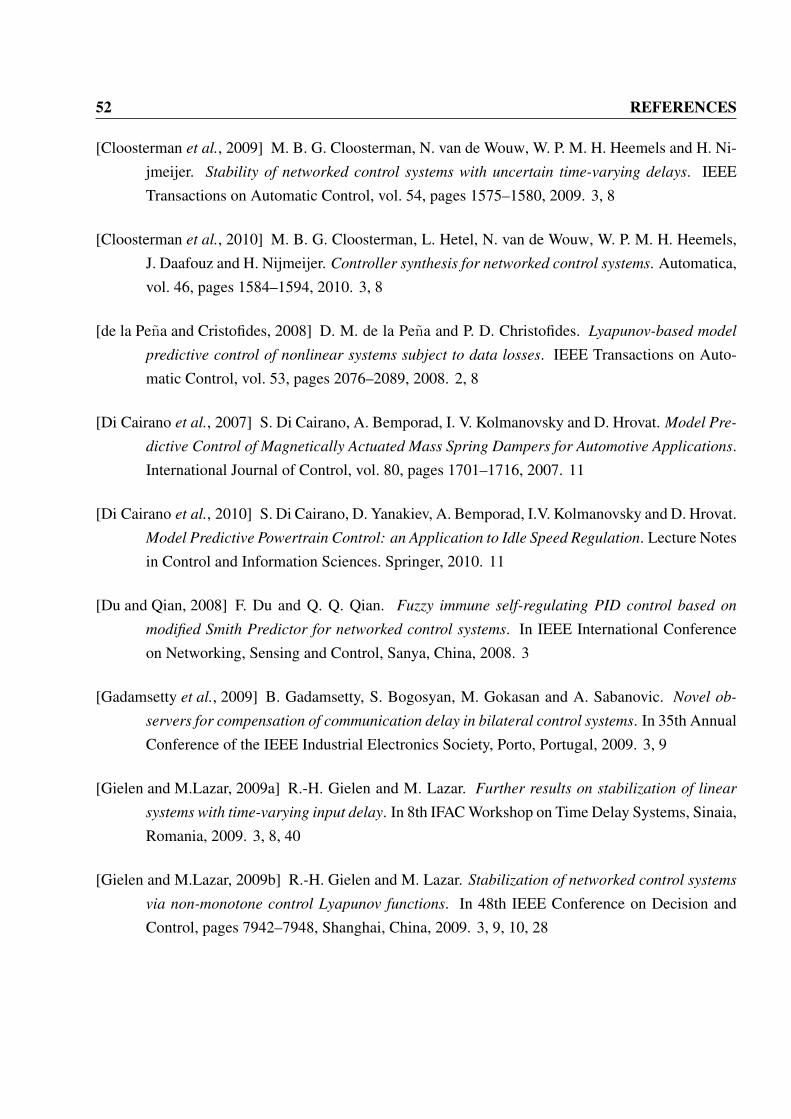
52 REFERENCES
[Cloosterman et al., 2009] M. B. G. Cloosterman, N. van de Wouw, W. P. M. H. Heemels and H. Ni-jmeijer. Stability of networked control systems with uncertain time-varying delays. IEEETransactions on Automatic Control, vol. 54, pages 1575–1580, 2009. 3, 8
[Cloosterman et al., 2010] M. B. G. Cloosterman, L. Hetel, N. van de Wouw, W. P. M. H. Heemels,J. Daafouz and H. Nijmeijer. Controller synthesis for networked control systems. Automatica,vol. 46, pages 1584–1594, 2010. 3, 8
[de la Pena and Cristofides, 2008] D. M. de la Pena and P. D. Christofides. Lyapunov-based model
predictive control of nonlinear systems subject to data losses. IEEE Transactions on Auto-matic Control, vol. 53, pages 2076–2089, 2008. 2, 8
[Di Cairano et al., 2007] S. Di Cairano, A. Bemporad, I. V. Kolmanovsky and D. Hrovat. Model Pre-
dictive Control of Magnetically Actuated Mass Spring Dampers for Automotive Applications.International Journal of Control, vol. 80, pages 1701–1716, 2007. 11
[Di Cairano et al., 2010] S. Di Cairano, D. Yanakiev, A. Bemporad, I.V. Kolmanovsky and D. Hrovat.Model Predictive Powertrain Control: an Application to Idle Speed Regulation. Lecture Notesin Control and Information Sciences. Springer, 2010. 11
[Du and Qian, 2008] F. Du and Q. Q. Qian. Fuzzy immune self-regulating PID control based on
modified Smith Predictor for networked control systems. In IEEE International Conferenceon Networking, Sensing and Control, Sanya, China, 2008. 3
[Gadamsetty et al., 2009] B. Gadamsetty, S. Bogosyan, M. Gokasan and A. Sabanovic. Novel ob-
servers for compensation of communication delay in bilateral control systems. In 35th AnnualConference of the IEEE Industrial Electronics Society, Porto, Portugal, 2009. 3, 9
[Gielen and M.Lazar, 2009a] R.-H. Gielen and M. Lazar. Further results on stabilization of linear
systems with time-varying input delay. In 8th IFAC Workshop on Time Delay Systems, Sinaia,Romania, 2009. 3, 8, 40
[Gielen and M.Lazar, 2009b] R.-H. Gielen and M. Lazar. Stabilization of networked control systems
via non-monotone control Lyapunov functions. In 48th IEEE Conference on Decision andControl, pages 7942–7948, Shanghai, China, 2009. 3, 9, 10, 28
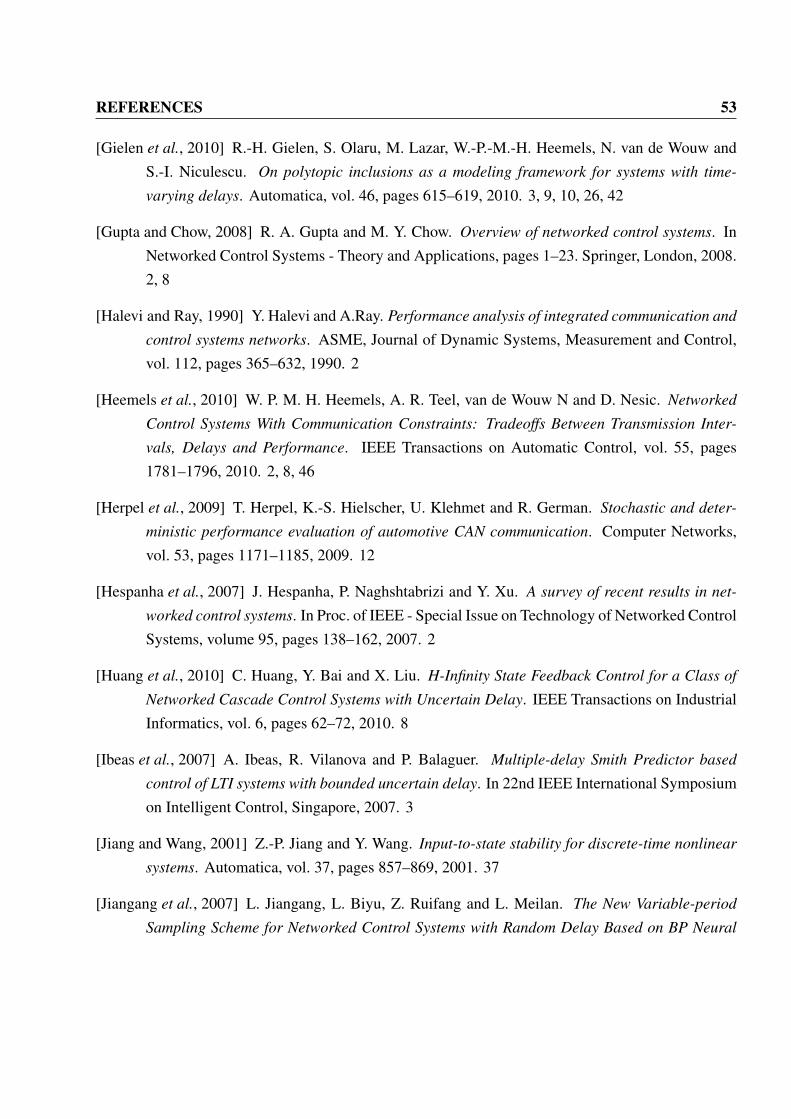
REFERENCES 53
[Gielen et al., 2010] R.-H. Gielen, S. Olaru, M. Lazar, W.-P.-M.-H. Heemels, N. van de Wouw andS.-I. Niculescu. On polytopic inclusions as a modeling framework for systems with time-
varying delays. Automatica, vol. 46, pages 615–619, 2010. 3, 9, 10, 26, 42
[Gupta and Chow, 2008] R. A. Gupta and M. Y. Chow. Overview of networked control systems. InNetworked Control Systems - Theory and Applications, pages 1–23. Springer, London, 2008.2, 8
[Halevi and Ray, 1990] Y. Halevi and A.Ray. Performance analysis of integrated communication and
control systems networks. ASME, Journal of Dynamic Systems, Measurement and Control,vol. 112, pages 365–632, 1990. 2
[Heemels et al., 2010] W. P. M. H. Heemels, A. R. Teel, van de Wouw N and D. Nesic. Networked
Control Systems With Communication Constraints: Tradeoffs Between Transmission Inter-
vals, Delays and Performance. IEEE Transactions on Automatic Control, vol. 55, pages1781–1796, 2010. 2, 8, 46
[Herpel et al., 2009] T. Herpel, K.-S. Hielscher, U. Klehmet and R. German. Stochastic and deter-
ministic performance evaluation of automotive CAN communication. Computer Networks,vol. 53, pages 1171–1185, 2009. 12
[Hespanha et al., 2007] J. Hespanha, P. Naghshtabrizi and Y. Xu. A survey of recent results in net-
worked control systems. In Proc. of IEEE - Special Issue on Technology of Networked ControlSystems, volume 95, pages 138–162, 2007. 2
[Huang et al., 2010] C. Huang, Y. Bai and X. Liu. H-Infinity State Feedback Control for a Class of
Networked Cascade Control Systems with Uncertain Delay. IEEE Transactions on IndustrialInformatics, vol. 6, pages 62–72, 2010. 8
[Ibeas et al., 2007] A. Ibeas, R. Vilanova and P. Balaguer. Multiple-delay Smith Predictor based
control of LTI systems with bounded uncertain delay. In 22nd IEEE International Symposiumon Intelligent Control, Singapore, 2007. 3
[Jiang and Wang, 2001] Z.-P. Jiang and Y. Wang. Input-to-state stability for discrete-time nonlinear
systems. Automatica, vol. 37, pages 857–869, 2001. 37
[Jiangang et al., 2007] L. Jiangang, L. Biyu, Z. Ruifang and L. Meilan. The New Variable-period
Sampling Scheme for Networked Control Systems with Random Delay Based on BP Neural
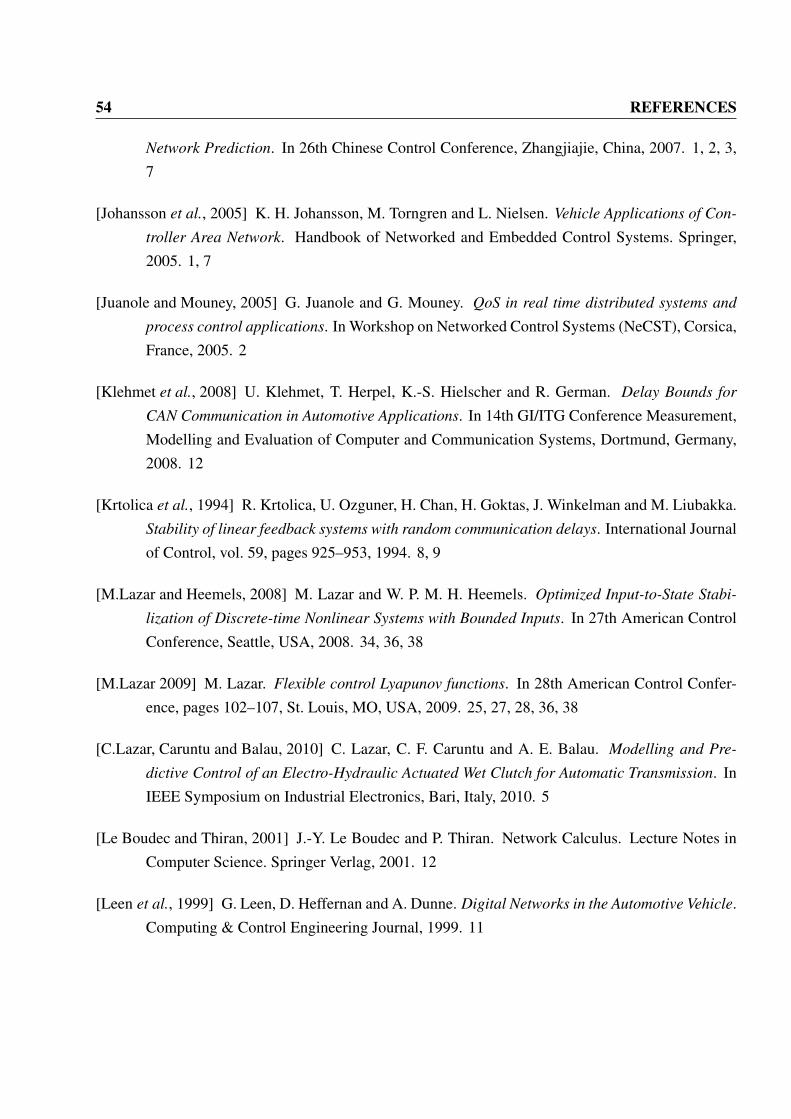
54 REFERENCES
Network Prediction. In 26th Chinese Control Conference, Zhangjiajie, China, 2007. 1, 2, 3,7
[Johansson et al., 2005] K. H. Johansson, M. Torngren and L. Nielsen. Vehicle Applications of Con-
troller Area Network. Handbook of Networked and Embedded Control Systems. Springer,2005. 1, 7
[Juanole and Mouney, 2005] G. Juanole and G. Mouney. QoS in real time distributed systems and
process control applications. In Workshop on Networked Control Systems (NeCST), Corsica,France, 2005. 2
[Klehmet et al., 2008] U. Klehmet, T. Herpel, K.-S. Hielscher and R. German. Delay Bounds for
CAN Communication in Automotive Applications. In 14th GI/ITG Conference Measurement,Modelling and Evaluation of Computer and Communication Systems, Dortmund, Germany,2008. 12
[Krtolica et al., 1994] R. Krtolica, U. Ozguner, H. Chan, H. Goktas, J. Winkelman and M. Liubakka.Stability of linear feedback systems with random communication delays. International Journalof Control, vol. 59, pages 925–953, 1994. 8, 9
[M.Lazar and Heemels, 2008] M. Lazar and W. P. M. H. Heemels. Optimized Input-to-State Stabi-
lization of Discrete-time Nonlinear Systems with Bounded Inputs. In 27th American ControlConference, Seattle, USA, 2008. 34, 36, 38
[M.Lazar 2009] M. Lazar. Flexible control Lyapunov functions. In 28th American Control Confer-ence, pages 102–107, St. Louis, MO, USA, 2009. 25, 27, 28, 36, 38
[C.Lazar, Caruntu and Balau, 2010] C. Lazar, C. F. Caruntu and A. E. Balau. Modelling and Pre-
dictive Control of an Electro-Hydraulic Actuated Wet Clutch for Automatic Transmission. InIEEE Symposium on Industrial Electronics, Bari, Italy, 2010. 5
[Le Boudec and Thiran, 2001] J.-Y. Le Boudec and P. Thiran. Network Calculus. Lecture Notes inComputer Science. Springer Verlag, 2001. 12
[Leen et al., 1999] G. Leen, D. Heffernan and A. Dunne. Digital Networks in the Automotive Vehicle.Computing & Control Engineering Journal, 1999. 11
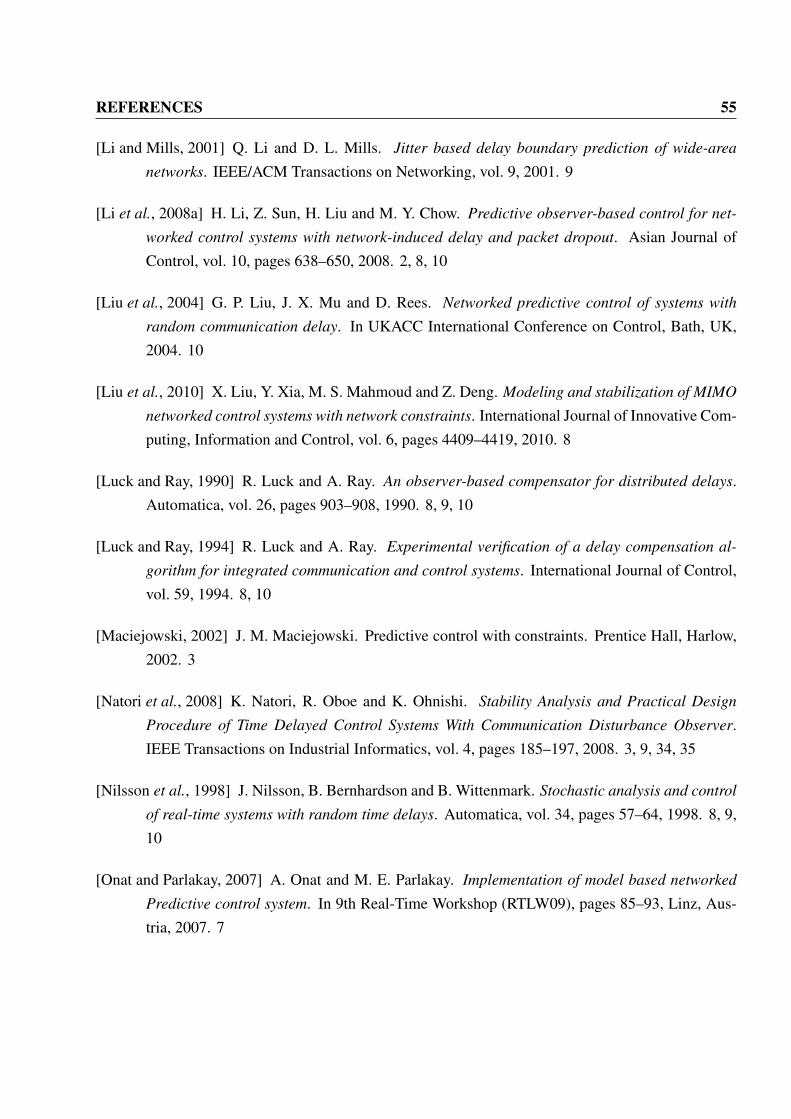
REFERENCES 55
[Li and Mills, 2001] Q. Li and D. L. Mills. Jitter based delay boundary prediction of wide-area
networks. IEEE/ACM Transactions on Networking, vol. 9, 2001. 9
[Li et al., 2008a] H. Li, Z. Sun, H. Liu and M. Y. Chow. Predictive observer-based control for net-
worked control systems with network-induced delay and packet dropout. Asian Journal ofControl, vol. 10, pages 638–650, 2008. 2, 8, 10
[Liu et al., 2004] G. P. Liu, J. X. Mu and D. Rees. Networked predictive control of systems with
random communication delay. In UKACC International Conference on Control, Bath, UK,2004. 10
[Liu et al., 2010] X. Liu, Y. Xia, M. S. Mahmoud and Z. Deng. Modeling and stabilization of MIMO
networked control systems with network constraints. International Journal of Innovative Com-puting, Information and Control, vol. 6, pages 4409–4419, 2010. 8
[Luck and Ray, 1990] R. Luck and A. Ray. An observer-based compensator for distributed delays.Automatica, vol. 26, pages 903–908, 1990. 8, 9, 10
[Luck and Ray, 1994] R. Luck and A. Ray. Experimental verification of a delay compensation al-
gorithm for integrated communication and control systems. International Journal of Control,vol. 59, 1994. 8, 10
[Maciejowski, 2002] J. M. Maciejowski. Predictive control with constraints. Prentice Hall, Harlow,2002. 3
[Natori et al., 2008] K. Natori, R. Oboe and K. Ohnishi. Stability Analysis and Practical Design
Procedure of Time Delayed Control Systems With Communication Disturbance Observer.IEEE Transactions on Industrial Informatics, vol. 4, pages 185–197, 2008. 3, 9, 34, 35
[Nilsson et al., 1998] J. Nilsson, B. Bernhardson and B. Wittenmark. Stochastic analysis and control
of real-time systems with random time delays. Automatica, vol. 34, pages 57–64, 1998. 8, 9,10
[Onat and Parlakay, 2007] A. Onat and M. E. Parlakay. Implementation of model based networked
Predictive control system. In 9th Real-Time Workshop (RTLW09), pages 85–93, Linz, Aus-tria, 2007. 7
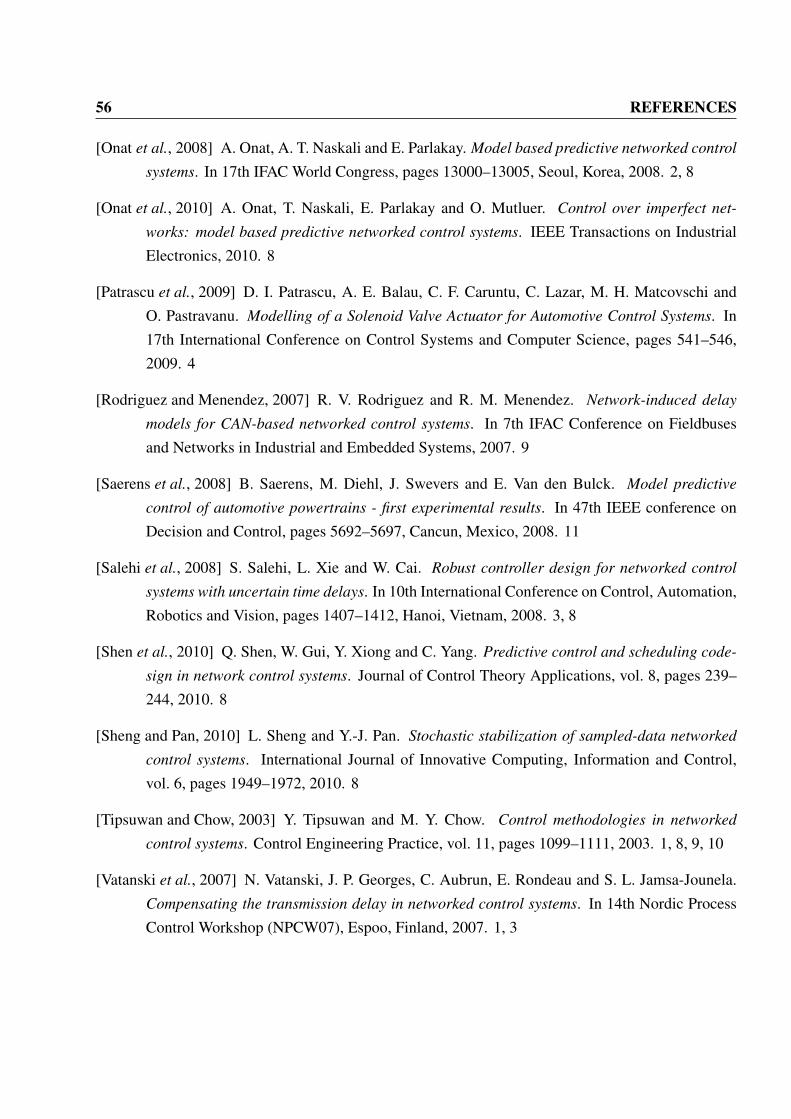
56 REFERENCES
[Onat et al., 2008] A. Onat, A. T. Naskali and E. Parlakay. Model based predictive networked control
systems. In 17th IFAC World Congress, pages 13000–13005, Seoul, Korea, 2008. 2, 8
[Onat et al., 2010] A. Onat, T. Naskali, E. Parlakay and O. Mutluer. Control over imperfect net-
works: model based predictive networked control systems. IEEE Transactions on IndustrialElectronics, 2010. 8
[Patrascu et al., 2009] D. I. Patrascu, A. E. Balau, C. F. Caruntu, C. Lazar, M. H. Matcovschi andO. Pastravanu. Modelling of a Solenoid Valve Actuator for Automotive Control Systems. In17th International Conference on Control Systems and Computer Science, pages 541–546,2009. 4
[Rodriguez and Menendez, 2007] R. V. Rodriguez and R. M. Menendez. Network-induced delay
models for CAN-based networked control systems. In 7th IFAC Conference on Fieldbusesand Networks in Industrial and Embedded Systems, 2007. 9
[Saerens et al., 2008] B. Saerens, M. Diehl, J. Swevers and E. Van den Bulck. Model predictive
control of automotive powertrains - first experimental results. In 47th IEEE conference onDecision and Control, pages 5692–5697, Cancun, Mexico, 2008. 11
[Salehi et al., 2008] S. Salehi, L. Xie and W. Cai. Robust controller design for networked control
systems with uncertain time delays. In 10th International Conference on Control, Automation,Robotics and Vision, pages 1407–1412, Hanoi, Vietnam, 2008. 3, 8
[Shen et al., 2010] Q. Shen, W. Gui, Y. Xiong and C. Yang. Predictive control and scheduling code-
sign in network control systems. Journal of Control Theory Applications, vol. 8, pages 239–244, 2010. 8
[Sheng and Pan, 2010] L. Sheng and Y.-J. Pan. Stochastic stabilization of sampled-data networked
control systems. International Journal of Innovative Computing, Information and Control,vol. 6, pages 1949–1972, 2010. 8
[Tipsuwan and Chow, 2003] Y. Tipsuwan and M. Y. Chow. Control methodologies in networked
control systems. Control Engineering Practice, vol. 11, pages 1099–1111, 2003. 1, 8, 9, 10
[Vatanski et al., 2007] N. Vatanski, J. P. Georges, C. Aubrun, E. Rondeau and S. L. Jamsa-Jounela.Compensating the transmission delay in networked control systems. In 14th Nordic ProcessControl Workshop (NPCW07), Espoo, Finland, 2007. 1, 3
REFERENCES 57
[Velagic, 2008] J. Velagic. Design of Smith-like Predictive Controller with Communication Delay
Adaptation. In World Congress on Science, Engineering and Technology, 5th InternationalConference on Control and Automation, Paris, France, 2008. 3, 9, 10, 43
[Wang et al., 2010] X.-L. Wang, C.-G. Fei and Z.-Z. Han. Adaptive predictive functional control
for networked control systems with random delays. International Journal of Automation andComputing, 2010. 2, 8
[Wei et al., 2002] W. Wei, B. Wang and D. Towsley. Continuous-time hidden Markov models for
network performance evaluation. Performance Evaluation, vol. 49, 2002. 9
[Wu et al., 2009] J. Wu, L. Zhang and T. Chen. Model predictive control for networked control
systems. International Journal of Robust and Nonlinear Control, vol. 19, pages 1016–1035,2009. 3
[Yoo and Wang, 2007] D. K. Yoo and L. Wang. Model based Wheel Slip Control via Constrained
Optimal Algorithm. In IEEE Multi-conference on Systems and Control, Singapore, 2007. 11
[Yue et al., 2009] D. Yue, E. Tian, Y. Zhang and C. Peng. Delay-distribution-dependent robust sta-
bility of uncertain systems with time-varying delay. International Journal of Robust and Non-linear Control, vol. 19, pages 377–393, 2009. 3
[Zhang et al., 2001] W. Zhang, M. S. Branicky and S. M. Philips. Stability of networked sontrol
systems. IEEE Control Systems Magazine, vol. 21, 2001. 2
[Zhang et al., 2005] Q. Zhang, C. Lin and P. Chen. Time-stamped dynamic matrix control for net-
worked control systems. In IEEE International Conference on Industrial Technology, pages1159–1163, Hong Kong, 2005. 8
[Zhang et al., 2006] Q. Z. Zhang, Y. C. Tang and W. D. Zhang. Adaptive dynamic matrix control for
network-based control systems with random delays. Asian Journal of Control, vol. 8, 2006. 9




![VIRUS & MARKOV - Ed[1]_ 4 - Stimularea Biologica__](https://static.fdocumente.com/doc/165x107/55cf9331550346f57b9c99a0/virus-markov-ed1-4-stimularea-biologica.jpg)












