Capitolul 5b.doc
16
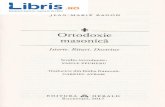
Sisteme de acţionare pentru echipamentele şi instalaţiile de reţinere a suspensiilor grosiere şi de separare prin sedimentare şi flotaţie Fig. 5.5. Motoare asincrone trifazate tip IM 1001, seria de gabarit 132- 200 Tabelul 5.8 Dimensiuni ale motoarelor tip IM 1001, seria de gabarit 132-200 Gaba - rit A B C H K D E F GA d AA AB BB BC HA AC HD L nom tol nom to l nom tol 132 S 21 6 14 0 89 13 2 0 - 0,5 12 38 k6 80 10 h9 41 M12 60 264200 69 19 263395523 132 M 21 6 17 8 89 13 2 0 - 0,5 12 38 k6 80 10 h9 41 M12 60 264250 69 19 263395570 160 M 25 4 21 0 10 8 16 0 0 - 0,5 15 42 k6 11 0 12 h9 45 M16 80 320300 63 20 317470660 160 L 25 4 25 4 10 8 16 0 0 - 0,5 15 42 k6 11 0 12 h9 45 M16 80 320300 63 20 317470660 170
Transcript of Capitolul 5b.doc
Capitolul 5
Determinarea parametrilor principali ai sistemelor de acionareSisteme de acionare pentru echipamentele i instalaiile de reinere a suspensiilor grosiere i de separare prin sedimentare i flotaie
Fig. 5.5. Motoare asincrone trifazate tip IM 1001, seria de gabarit 132-200Tabelul 5.8
Dimensiuni ale motoarelor tip IM 1001, seria de gabarit 132-200
Gaba-
ritABCHKDEFGAdAAABBBBCHAACHDL
nomtol
nomtol
nomtol
132S216140891320
-0,51238k68010h941M12602642006919263395523
132M216178891320
-0,51238k68010h941M12602642506919263395570
160M2542101081600
-0,51542k611012h945M16803203006320317470660
160L2542541081600
-0,51542k611012h945M16803203006320317470660
180M2792411211800
-0,51548k611014h951,5M16803603407125357520730
180L2792791211800
-0,51548k611014h951,5M16803603407125357520730
200L3183051332000
-0,51955m611016h959M20824003809525396573800
Fig. 5.6. Motoare asincrone trifazate tip IM 3001, seria de gabarit 132-200
Tabelul 5.9
Dimensiuni ale motoarelor tip IM 3001, seria de gabarit 132-200
GabaritMNPSTDEFGAdACHD1LALBL
nomtol
nomtol
nomtol
132S265230j630015438k68010h941M1226326312440520
132M265230j630015438k68010h941M1226326312487567
160M300250j635019542k611012h945M1631733516555665
160L300250j635019542k611012h945M1631733516585695
180M300250j635019548k611014h951,5M1635735016626735
180L300250j635019548k611014h951,5M1635735016655765
200L350300j640019555m611016h959M2039637316680790
5.2.2. Parametrii caracteristici ai transmisiei
Transmisiile mecanice uzuale utilizate la sistemele de acionare de la echipamentele i instalaiile analizate pot avea n componen urmtoarele tipuri de elemente de transmisie:
- angrenaje;
- transmisii cu curele;
- transmisii cu lanuri;
- transmisii cu roi de friciune.
Folosirea n cadrul transmisiei a unuia sau mai multor dintre elementele de transmisie prezentate mai sus, este stabilit de ctre proiectant n funcie de caracteristicile i capabilitile elementelor, de modul cum acestea rspund la necesitile transmiterii fluxului de micare, de condiiile pe care elementele le impun pentru o funcionare corect, de modul n care elementele permit o exploatare i ntreinere ct mai uoare. Este de la sine neles c, n urma unei analize a mai multor variante de transmisie posibile, proiectanii vor trebui s aleag varianta cea mai simpl i cea mai ieftin, dar care s rspund corespunztor la cerinele impuse.
Principalii parametrii ai unei transmisii mecanice sunt urmtorii:
Raportul itot total al transmisiei sistemului de acionare care se determin cu relaia:
(5.1)
n care: nME [rot/min]- turaia motorului electric;
nnec[rot/min] - turaia necesar pentru acionarea organelor de lucru (vezi capitolele precedente).
Dac transmisia este format din zTR componente, atunci relaia dintre raportul iTR de transmisie i rapoartele ik ale celor zTR componente ale transmisiei este:
(5.2)
Pentru alegerea unei anumite configuraii a transmisiei dup valoarea raportului de transmisie capabil, n tabelul 5.10 sunt indicate valorile recomandate i limit maxim pentru diferite tipuri de transmisii.
Randamentul TR total al transmisiei sistemului de acionare care se determin cu relaia:
(5.3)
Pentru determinarea randamentelor k ale componentelor transmisiei se pot folosi valorile orientative din tabelul 5.11.
Tabelul 5.10 [1]
Tipul transmisieiRecomandat Valoare maxim
Reductor cu roi dinate cilindrice2,5 6,312,5
Reductor cu roi dinate conice2 46,3
Reductor melcat10 4080
Angrenaj cu roi dinate, deschis3 715 18
Angrenaj melcat, deschis10 60120
Transmisie cu lan2 68
Transmisie cu roi de friciune 2 48
Transmisie cu curea lat2 56
Transmisie cu curea cu rol de ntindere4 68
Transmisie cu curea trapezoidal2 57
Tabelul 5.11 [1]
Cupla de frecarenchis Deschis
Angrenaj cilindric
Angrenaj conic
Motoreductor melcat
Angrenaj melcat, melcul avnd 1 nceput
Angrenaj melcat, melcul avnd 2 nceputuri
Angrenaj melcat, melcul avnd 3 nceputuri
Angrenaj melcat, melcul avnd 4 nceputuri0,97 0,99
0,96 0,98
0,40
0,70 0,75
0,75 0,82
0,80 0,85
0,88 0,920,93 0,95
0,92 0,94
0,30
0,50 0,60
0,60 0,70
-
-
Roi cu friciune0,90 0,960,70 0,88
Transmisie cu lan0,95 0,970,90 0,93
Transmisie cu curea lat sau trapezoidal-0,94 0,97
O pereche de rulmeni
O pereche de lagre cu alunecare0,99 0,995
0,98 0,99
Puterea PME [kW] a motorului electric care se poate determina cu relaia:
(5.4)
n care: cs coeficient ce ine seama de necesarul de putere, necesar la pornire sau la suprasarcini accidentale, care poate lua valori ntre 1,3 2;
Pac [W] puterea necesar pentru acionarea organelor de lucru (vezi capitolele precedente).
Avnd n vedere c n acest moment al procesului de proiectare nu este stabilit nc structura transmisiei, deci nu poate fi precizat valoarea randamentului total TR se va folosi urmtorul algoritm de determinare a parametrilor transmisiei:
- se estimeaz PME a motorului electric pe baza relaiei 5.4, lund n considerare o valoare estimativ a randamentului total TR ntre 0,9 0,5 n funcie de complexitatea estimat a transmisiei;
- pe baza valorii obinute pentru puterea PME se alege din tabelele 5.1 5.4 motorul electric corespunztor cu turaia nME cea mai convenabil;
- pe baza turaiei nME se stabilete valoarea preliminar a raportului iTR total de transmitere;
- pe baza valorii preliminare a raportului iTR se realizeaz configurarea transmisiei, se determin valoarea real a randamentului total TR i apoi se determin valoarea real a puterii PME necesare a motorului electric,
- cu valoarea real a puterii PME se realege din tabelele 5.1 5.4, varianta cea mai corespunztoare, real, de motor electric;
- pe baza turaiei nominale nME a motorului electric, varianta real, se calculeaz valoarea exact a raportului total de transmitere iTR.
5.3. Scheme cinematice ale sistemelor de acionare de la echipamentele i instalaiile de reinere a suspensiilor grosiere i de separare prin sedimentare i flotaie
n acest paragraf, vor fi prezentate mai multe variante de scheme de acionare de la echipamentele i instalaiile de reinere a suspensiilor grosiere i de separare a impuritilor prin sedimentare i flotaie, frecvent utilizate n practic, i anume:
- scheme de acionare a sistemelor de curare cu greble de la grtarele plane (vezi figura 5.7.);
- schem de acionare a transportorului-pres de la echipamentele de sitare cu grtare plane (vezi figura 5.8.);
- schem de acionare de la echipamentele de sitare cu grtare cilindrice fixe i ncrcare frontal (vezi figura 5.9.);
- schem de acionare de la echipamentele de sitare cu grtare cilindrice mobile i ncrcare frontal (vezi figura 5.10.);
- scheme de acionare a podurilor rulante racloare de la obiecte tehnologice cu bazine longitudinale: deznisipatoare, decantoare, separatoare de grsimi (vezi figura 5.11.);
- scheme de acionare a podurilor rulante racloare de la decantoare radiale (vezi figura 5.12.);
- schem de acionare a sistemului de raclare cu racloare pe lanuri de la de la decantoarele longitudinale (vezi figura 5.11.);
Fig. 5.7. Scheme cinematice de acionare a sistemelor de curare de la grtarele planeFig. 5.8. Schema cinematic de acionare a transportorului compactor de la echipamentul de sitare cu grtar plan
Fig. 5.9. Schema cinematic de acionare a echipamentului de sitare cu grtar cilindric fix i ncrcare frontal
Fig. 5.10. Schema cinematic de acionare a echipamentului de sitare cu grtar cilindric mobil i ncrcare frontal
Fig. 5.11. Scheme cinematice de acionare a podurilor rulante de raclare de la bazine longitudinale (deznisipatoare, decantoare, separatoare de grsimi
Fig. 5.12. Scheme cinematice de acionare a podurilor rulante de la bazinele radiale
Fig. 5.13. Schem cinematic de acionare a racloarelor pe lanuri de la decantoarele longitudinale
Bibliografie
1. Filipoiu I.D., Tudor A. Transmisii mecanice. ndrumar pentru proiectare, Institutul Politehnic Bucureti, Catedra de Organe de maini, Bucureti, 1990
2. *** Motoare asincrone antiexpolzive i antideflagrante - Catalog de produse - Uzina de Motoare Electrice Bucureti, 2003
EMBED PBrush
EMBED PBrush
EMBED AutoCAD.Drawing.15
EMBED AutoCAD.Drawing.15
EMBED AutoCAD.Drawing.15
180177
_1129979233.dwg
_1129981933.dwg
_1130237547.unknown
_1129979644.dwg
_1129981550.dwg
_1129979387.dwg
_1127808309.unknown
_1129373966.dwg
_1129374984.dwg
_1127809564.unknown
_1127737286.unknown