
Algebra s˘i geometrie - adrianmanea.xyz · 1.2 Metoda Gauss-Jordan Aceasta metod˘ a ne permite...
75
Algebr˘ as , i geometrie Notit , e de seminar A M Curs: A. Nit , ˘ a, R. R˘ adulescu, V. Slesar 20 ianuarie 2019
Transcript of Algebra s˘i geometrie - adrianmanea.xyz · 1.2 Metoda Gauss-Jordan Aceasta metod˘ a ne permite...

Algebra s, i geometrieNotit,e de seminar
Adrian ManeaCurs: A. Nit, a, R. Radulescu, V. Slesar
20 ianuarie 2019
Cuprins
1 Recapitulare structuri algebrice s, i matrice 31.1 Structuri algebrice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.2 Metoda Gauss-Jordan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.2.1 Inversarea matricelor cu metoda Gauss-Jordan . . . . . . . . . . . . . . . . 61.2.2 Aplicat, ie: Sisteme liniare . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.3 Exercit, ii . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2 Spat, ii vectoriale 112.1 De�nit, ii . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.2 Baza s, i dimensiune . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172.3 Matricea unei aplicat, ii liniare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182.4 Matricea de trecere (schimbare de baza) . . . . . . . . . . . . . . . . . . . . . . . . 202.5 Exercit, ii . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 212.6 Exercit, ii suplimentare. Teorema lui Grassmann . . . . . . . . . . . . . . . . . . . . 242.7 Teorema lui Grassmann . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 252.8 Exercit, ii Grassmann . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3 Vectori s, i valori proprii. Diagonalizare 273.1 Vectori s, i valori proprii . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 273.2 Matrice de trecere. Diagonalizare . . . . . . . . . . . . . . . . . . . . . . . . . . . 283.3 Exercit, ii . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
4 Modele de part, ial 314.1 Model 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 314.2 Model 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 324.3 Model 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
5 Spat, ii euclidiene. Ortonormare 375.1 Exercit, ii . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
6 Forma canonica Jordan. Conice s, i cuadrice 416.1 Forma canonica Jordan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
6.1.1 Exemple rezolvate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 426.1.2 Exercit, ii propuse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
6.2 Conice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 456.3 Cuadrice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 486.4 Exercit, ii propuse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
7 Ecuat, ii s, i sisteme diferent, iale 517.1 Ecuat, ii cu variabile separabile/separate . . . . . . . . . . . . . . . . . . . . . . . . 517.2 Ecuat, ii liniare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 527.3 Ecuat, ia Bernoulli . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 537.4 Ecuat, ia Riccati . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 557.5 Ecuat, ia Clairaut . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 557.6 Ecuat, ii exacte. Factor integrant . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 567.7 Ecuat, ia Lagrange . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 587.8 Sisteme diferent, iale cu coe�cient, i constant, i . . . . . . . . . . . . . . . . . . . . . . 597.9 Exponent, iale matriceale s, i sisteme folosind forma Jordan . . . . . . . . . . . . . . 62
8 Recapitulare examen 658.1 Model 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 658.2 Model 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 668.3 Model 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
Index 70
1
2
SEMINAR 1
RECAPITULARE STRUCTURI ALGEBRICE S, IMATRICE
1.1 Structuri algebrice
Amintim cıteva not, iuni esent, iale ın ce prives, te structurile algebrice. Incepem cu not, iuni prelimi-nare, anume relat, ii binare.
De�nitie 1.1: Fie A o mult, ime nevida. O submult, ime a produsului cartezian A × A se numes, terelat, ie binara pe A.
Daca R ⊆ A ×A este o asemenea relat, ie, ın locul notat, iei a, b ∈ R, pentru doua elemente a�ateın relat, ie, vom folosi aRb s, i vom citi ”a este ın relat, ia R cu b“.
De exemplu, relat, ia de rudenie este o relat, ie binara, de�nita pe mult, imea oamenilor, relat, ia deordine este o relat, ie binara de�nita pe mult, imea numerelor naturale, de pilda, relat, ia de paralelismeste o relat, ie binara de�nita pe mult, imea curbelor din plan s, i altele.
Relat, iile binare pot avea una sau mai multe din urmatoarele proprietat, i:Vom pastra notat, iile s, i contextul de mai sus. Relat, ia R se numes, te:
• re�exiva, daca orice element este ın relat, ia R cu sine, i.e. aRa, ∀a ∈ A;
• simetrica, daca oricınd aRb implica bRa, pentru nis, te a, b ∈ A;
• antisimetrica, daca din aRb s, i bRa, pentru nis, te a, b ∈ A, rezulta ca a s, i b coincid.
• tranzitiva, daca din aRb s, i bRc putem deduce aRc, pentru orice a, b, c ∈ A care satisfacipoteza.
3

In funct, ie de proprietat, ile respectate, relat, iile se pot clasi�ca. De exemplu, cel mai des se ıntılnes, terelat, ia de ordine, care este re�exiva, antisimetrica s, i tranzitiva, precum s, i relat, ia de echivalent, a,care este re�exiva, simetrica s, i tranzitiva.
Exemple clasice: relat, ia ”≤“ este o relat, ie de ordine pe mult, imea ℝ. Egalitatea este o relat, ie deechivalent, a, de�nita pe aproape orice mult, ime de obiecte matematice de acelas, i tip (mult, imi denumere, de matrice, de funct, ii s, .a.m.d.).
Daca relat, iile binare nu returneaza un al treilea element, deci nu dau o dependent, a funct, ionala,ele avınd doar o valoare de adevar (i.e. putem spune doar daca aRb este adevarat, nu s, i ”cıt face“aRb), operat, iile sau legile de compozit, ie au aceasta proprietate. Mai precis:
De�nitie 1.2: Fie A o mult, ime nevida. Se numes, te lege de compozit, ie sau operat, ie (binara) oricefunct, ie de tipul f ∶ A × A→ A.
Exemplele tipice sınt operat, iile algebrice, pe mult, imi de numere. Insa ınainte de a le folosi,mai avem nevoie de terminologie.
Pastrınd notat, iile s, i contextul de mai sus, o lege de compozit, ie f se numes, te:
• interna, daca ∀a, b ∈ A, f (a, b) ∈ A (automat veri�cata, daca ın de�nit, ie impunem condit, iaca f sa �e funct, ie s, i nu doar o asociere abstracta);
• asociativa, daca ∀a, b, c ∈ A, f (a, f (b, c)) = f (f (a, b), c);
• comutativa, daca ∀a, b ∈ A, are loc f (a, b) = f (b, a);
• cu element neutru, daca exista un element distins (unic) e ∈ A, astfel ıncıt f (a, e) = f (e, a) =a, ∀a ∈ A;
• cu elemente inversabile (simetrizabile) daca pentru un a ∈ A exista a−1
∈ A astfel ıncıtf (a, a
−1) = f (a
−1, a) = e, elementul neutru.
Cum spuneam, exemplele tipice sınt operat, iile algebrice elementare. Cum ar � adunarea,de�nita pe mult, imea numerelor reale, care are toate proprietat, ile de mai sus. Inmult, irea, de�nitape mult, imea numerelor naturale, nu admite decıt un singur element inversabil, anume 1.
Compunerea funct, iilor reale, pe de alta parte, nu este comutativa, dar are elemente inversabile(chiar daca nu toate), anume funct, iile bijective.
Exista su�ciente exemple de operat, ii care nu au una sau mai multe din proprietat, ile de maisus, dupa cum va putet, i convinge.
Deoarece, ca ın cazul relat, iilor binare, exista o legatura strınsa ıntre operat, ie s, i mult, imea pecare a fost de�nita, se de�nesc structurile algebrice ca �ind exact perechi alcatuite din mult, imi s, ioperat, ii de�nite pe ele, satisfacınd anumite proprietat, i, conform de�nit, iilor de mai jos.
4
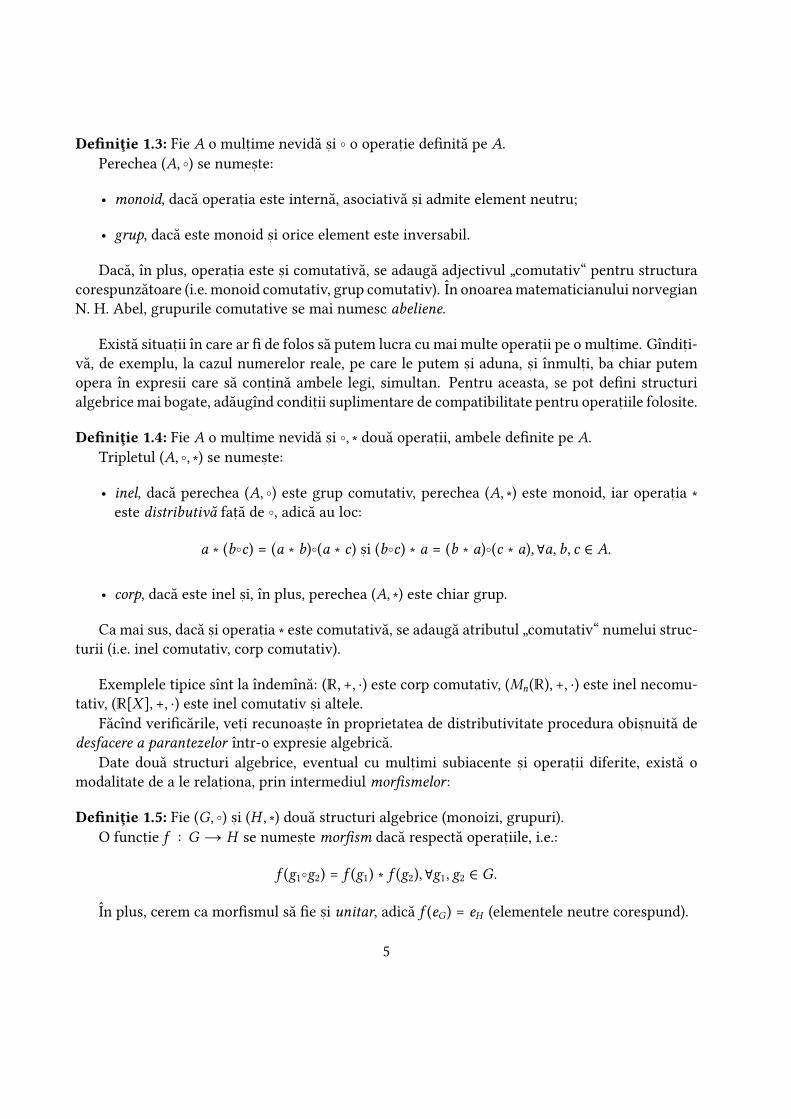
De�nitie 1.3: Fie A o mult, ime nevida s, i ◦ o operat, ie de�nita pe A.Perechea (A, ◦) se numes, te:
• monoid, daca operat, ia este interna, asociativa s, i admite element neutru;
• grup, daca este monoid s, i orice element este inversabil.
Daca, ın plus, operat, ia este s, i comutativa, se adauga adjectivul ”comutativ“ pentru structuracorespunzatoare (i.e. monoid comutativ, grup comutativ). In onoarea matematicianului norvegianN. H. Abel, grupurile comutative se mai numesc abeliene.
Exista situat, ii ın care ar � de folos sa putem lucra cu mai multe operat, ii pe o mult, ime. Gındit, i-va, de exemplu, la cazul numerelor reale, pe care le putem s, i aduna, s, i ınmult, i, ba chiar putemopera ın expresii care sa cont, ina ambele legi, simultan. Pentru aceasta, se pot de�ni structurialgebrice mai bogate, adaugınd condit, ii suplimentare de compatibilitate pentru operat, iile folosite.
De�nitie 1.4: Fie A o mult, ime nevida s, i ◦, ∗ doua operat, ii, ambele de�nite pe A.Tripletul (A, ◦, ∗) se numes, te:
• inel, daca perechea (A, ◦) este grup comutativ, perechea (A, ∗) este monoid, iar operat, ia ∗
este distributiva fat, a de ◦, adica au loc:
a ∗ (b◦c) = (a ∗ b)◦(a ∗ c) s, i (b◦c) ∗ a = (b ∗ a)◦(c ∗ a), ∀a, b, c ∈ A.
• corp, daca este inel s, i, ın plus, perechea (A, ∗) este chiar grup.
Ca mai sus, daca s, i operat, ia ∗ este comutativa, se adauga atributul ”comutativ“ numelui struc-turii (i.e. inel comutativ, corp comutativ).
Exemplele tipice sınt la ındemına: (ℝ, +, ⋅) este corp comutativ, (Mn(ℝ), +, ⋅) este inel necomu-tativ, (ℝ[X ], +, ⋅) este inel comutativ s, i altele.
Facınd veri�carile, vet, i recunoas, te ın proprietatea de distributivitate procedura obis, nuita dedesfacere a parantezelor ıntr-o expresie algebrica.
Date doua structuri algebrice, eventual cu mult, imi subiacente s, i operat, ii diferite, exista omodalitate de a le relat, iona, prin intermediul mor�smelor :
De�nitie 1.5: Fie (G, ◦) s, i (H, ∗) doua structuri algebrice (monoizi, grupuri).O funct, ie f ∶ G → H se numes, te mor�sm daca respecta operat, iile, i.e.:
f (g1◦g2) = f (g1) ∗ f (g2), ∀g1, g2 ∈ G.
In plus, cerem ca mor�smul sa �e s, i unitar, adica f (eG) = eH (elementele neutre corespund).
5
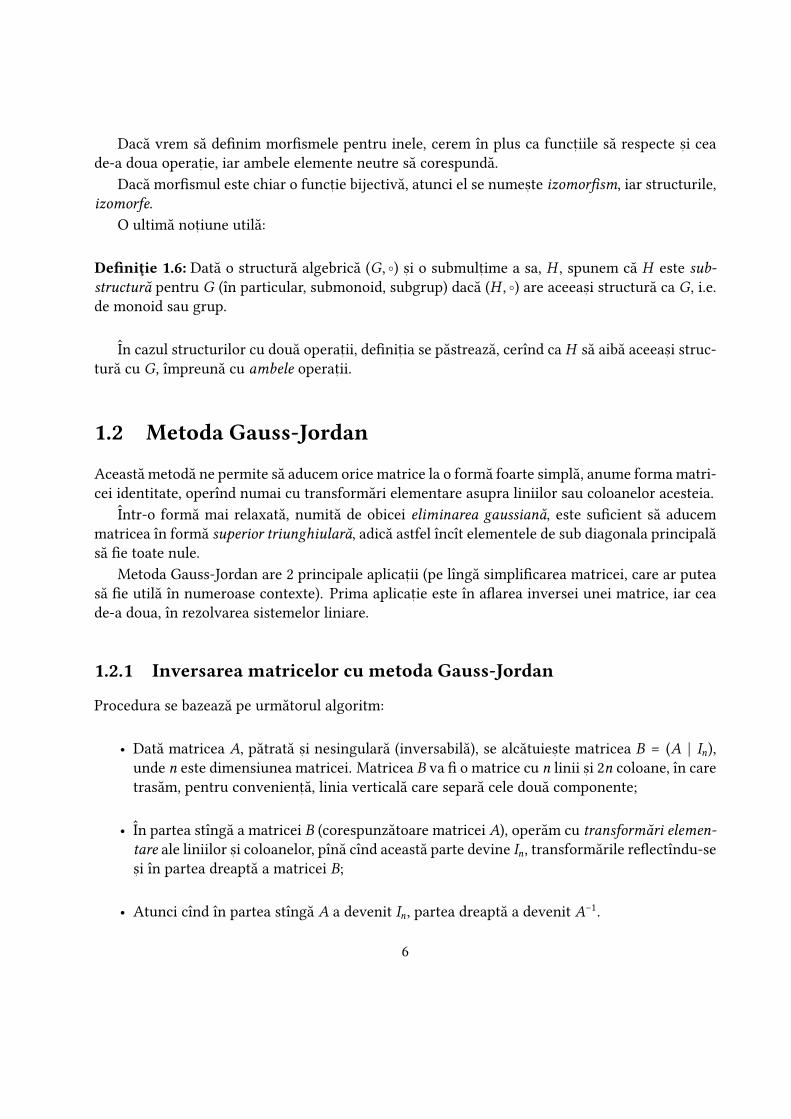
Daca vrem sa de�nim mor�smele pentru inele, cerem ın plus ca funct, iile sa respecte s, i ceade-a doua operat, ie, iar ambele elemente neutre sa corespunda.
Daca mor�smul este chiar o funct, ie bijectiva, atunci el se numes, te izomor�sm, iar structurile,izomorfe.
O ultima not, iune utila:
De�nitie 1.6: Data o structura algebrica (G, ◦) s, i o submult, ime a sa, H , spunem ca H este sub-structura pentru G (ın particular, submonoid, subgrup) daca (H, ◦) are aceeas, i structura ca G, i.e.de monoid sau grup.
In cazul structurilor cu doua operat, ii, de�nit, ia se pastreaza, cerınd ca H sa aiba aceeas, i struc-tura cu G, ımpreuna cu ambele operat, ii.
1.2 Metoda Gauss-Jordan
Aceasta metoda ne permite sa aducem orice matrice la o forma foarte simpla, anume forma matri-cei identitate, operınd numai cu transformari elementare asupra liniilor sau coloanelor acesteia.
Intr-o forma mai relaxata, numita de obicei eliminarea gaussiana, este su�cient sa aducemmatricea ın forma superior triunghiulara, adica astfel ıncıt elementele de sub diagonala principalasa �e toate nule.
Metoda Gauss-Jordan are 2 principale aplicat, ii (pe lınga simpli�carea matricei, care ar puteasa �e utila ın numeroase contexte). Prima aplicat, ie este ın a�area inversei unei matrice, iar ceade-a doua, ın rezolvarea sistemelor liniare.
1.2.1 Inversarea matricelor cu metoda Gauss-Jordan
Procedura se bazeaza pe urmatorul algoritm:
• Data matricea A, patrata s, i nesingulara (inversabila), se alcatuies, te matricea B = (A ∣ In),unde n este dimensiunea matricei. Matricea B va � o matrice cu n linii s, i 2n coloane, ın caretrasam, pentru convenient, a, linia verticala care separa cele doua componente;
• In partea stınga a matricei B (corespunzatoare matricei A), operam cu transformari elemen-tare ale liniilor s, i coloanelor, pına cınd aceasta parte devine In, transformarile re�ectındu-ses, i ın partea dreapta a matricei B;
• Atunci cınd ın partea stınga A a devenit In, partea dreapta a devenit A−1.
6
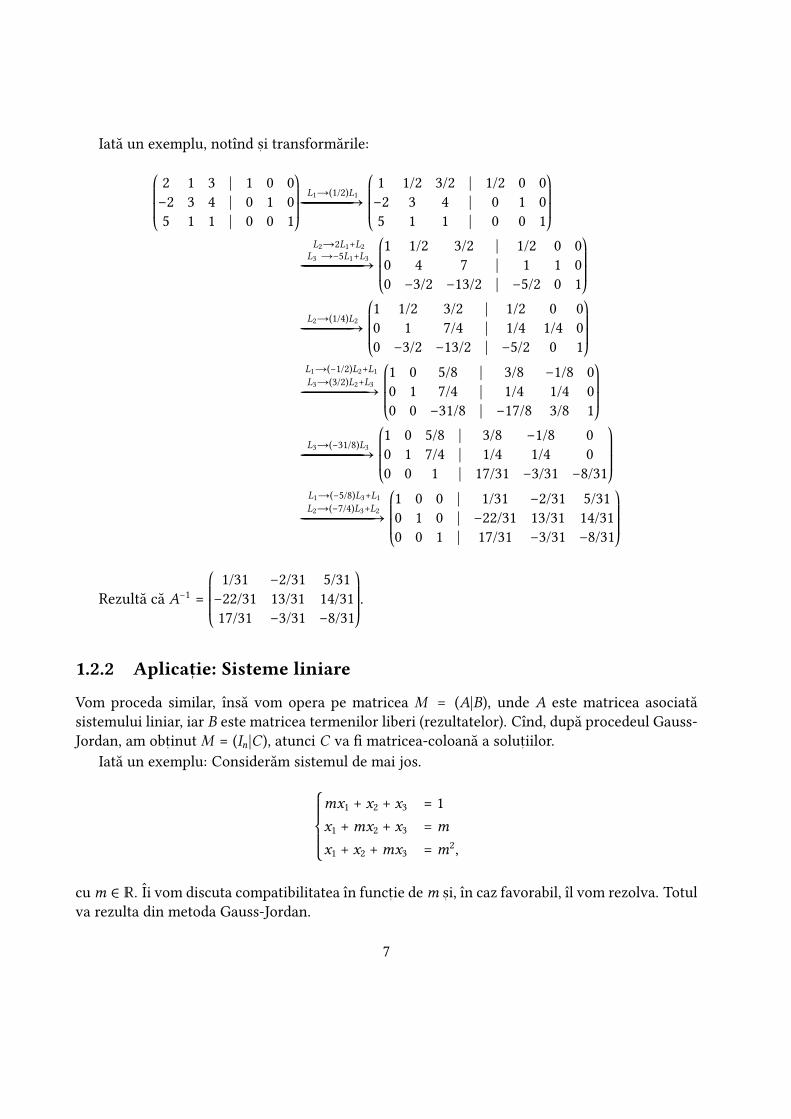
Iata un exemplu, notınd s, i transformarile:
⎛
⎜
⎜
⎝
2 1 3 ∣ 1 0 0
−2 3 4 ∣ 0 1 0
5 1 1 ∣ 0 0 1
⎞
⎟
⎟
⎠
L1→(1/2)L1
←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←→
⎛
⎜
⎜
⎝
1 1/2 3/2 ∣ 1/2 0 0
−2 3 4 ∣ 0 1 0
5 1 1 ∣ 0 0 1
⎞
⎟
⎟
⎠
L2→2L1+L2
L3 →−5L1+L3
←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←→
⎛
⎜
⎜
⎝
1 1/2 3/2 ∣ 1/2 0 0
0 4 7 ∣ 1 1 0
0 −3/2 −13/2 ∣ −5/2 0 1
⎞
⎟
⎟
⎠
L2→(1/4)L2
←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←→
⎛
⎜
⎜
⎝
1 1/2 3/2 ∣ 1/2 0 0
0 1 7/4 ∣ 1/4 1/4 0
0 −3/2 −13/2 ∣ −5/2 0 1
⎞
⎟
⎟
⎠
L1→(−1/2)L2+L1
L3→(3/2)L2+L3
←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←→
⎛
⎜
⎜
⎝
1 0 5/8 ∣ 3/8 −1/8 0
0 1 7/4 ∣ 1/4 1/4 0
0 0 −31/8 ∣ −17/8 3/8 1
⎞
⎟
⎟
⎠
L3→(−31/8)L3
←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←→
⎛
⎜
⎜
⎝
1 0 5/8 ∣ 3/8 −1/8 0
0 1 7/4 ∣ 1/4 1/4 0
0 0 1 ∣ 17/31 −3/31 −8/31
⎞
⎟
⎟
⎠
L1→(−5/8)L3+L1
L2→(−7/4)L3+L2
←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←→
⎛
⎜
⎜
⎝
1 0 0 ∣ 1/31 −2/31 5/31
0 1 0 ∣ −22/31 13/31 14/31
0 0 1 ∣ 17/31 −3/31 −8/31
⎞
⎟
⎟
⎠
Rezulta ca A−1=
⎛
⎜
⎜
⎝
1/31 −2/31 5/31
−22/31 13/31 14/31
17/31 −3/31 −8/31
⎞
⎟
⎟
⎠
.
1.2.2 Aplicat, ie: Sisteme liniare
Vom proceda similar, ınsa vom opera pe matricea M = (A|B), unde A este matricea asociatasistemului liniar, iar B este matricea termenilor liberi (rezultatelor). Cınd, dupa procedeul Gauss-Jordan, am obt, inut M = (In|C), atunci C va � matricea-coloana a solut, iilor.
Iata un exemplu: Consideram sistemul de mai jos.
⎧⎪⎪⎪
⎨⎪⎪⎪⎩
mx1 + x2 + x3 = 1
x1 +mx2 + x3 = m
x1 + x2 +mx3 = m2,
cum ∈ ℝ. Ii vom discuta compatibilitatea ın funct, ie dem s, i, ın caz favorabil, ıl vom rezolva. Totulva rezulta din metoda Gauss-Jordan.
7

Consideram matricea M de mai sus:
(A|B) =
⎛
⎜
⎜
⎝
m 1 1 ∣ 1
1 m 1 ∣ m
1 1 m ∣ m2
⎞
⎟
⎟
⎠
L1↔L2
←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←→
⎛
⎜
⎜
⎝
1 m 1 ∣ m
m 1 1 ∣ 1
1 1 m ∣ m2
⎞
⎟
⎟
⎠
L2→L2−mL1
L3→L3−L1
←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←←→
⎛
⎜
⎜
⎝
1 m 1 ∣ m
0 1 −m2
1 −m ∣ 1 −m2
0 1 −m m − 1 ∣ m2−m.
⎞
⎟
⎟
⎠
In acest punct, avem o discut, ie:(a) Daca m = 1, atunci sistemul se reduce la prima ecuat, ie, deci este compatibil dublu nede-
terminat. Rezulta solut, ia{(1 − � − �, �, �) ∣ �, � ∈ ℝ}.
(b) Daca m ≠ 1, atunci putem continua transformarile s, i ajungem, ın �ne, la:
M =
⎛
⎜
⎜
⎝
1 0 1 +m ∣ m +m2
0 1 −1 ∣ −m
0 0 2 ∣ (m + 1)2
⎞
⎟
⎟
⎠
Aici discutam din nou:(b1) Daca m = −2, sistemul este incompatibil, deoarece ultima ecuat, ie devine 0 = 1.(b2) Daca m ≠ −2, putem continua transformarile s, i ajungem, ın cele din urma, la:
M =
⎛
⎜
⎜
⎝
1 0 0 ∣ −m+1
m2
0 1 0 ∣1
m+2
0 0 1 ∣(m+1)
2
m+2.
⎞
⎟
⎟
⎠
In acest ultim caz, sistemul este compatibil determinat, solut, ia �ind data de ultima coloana:⎧⎪⎪⎪
⎨⎪⎪⎪⎩
x1 = −m+1
2
x2 =1
m+2
x3 =(m+1)
2
m+2.
Concluzia generala este:
(a) Daca m ∈ ℝ − {−2, 1}, sistemul are solut, ie unica;
(b) Daca m = −2, sistemul este incompatibil;
(c) Daca m = −1, sistemul este compatibil nedeterminat.
8
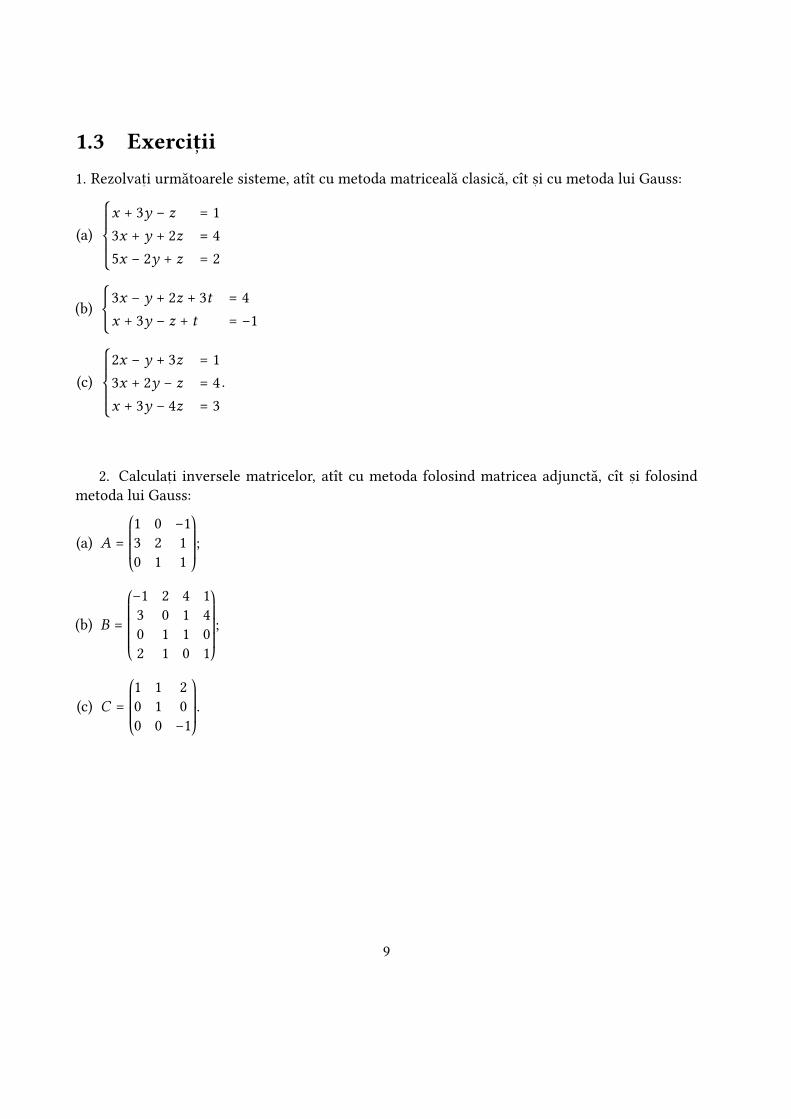
1.3 Exercit, ii1. Rezolvat, i urmatoarele sisteme, atıt cu metoda matriceala clasica, cıt s, i cu metoda lui Gauss:
(a)
⎧⎪⎪⎪
⎨⎪⎪⎪⎩
x + 3y − z = 1
3x + y + 2z = 4
5x − 2y + z = 2
(b)
{
3x − y + 2z + 3t = 4
x + 3y − z + t = −1
(c)
⎧⎪⎪⎪
⎨⎪⎪⎪⎩
2x − y + 3z = 1
3x + 2y − z = 4
x + 3y − 4z = 3
.
2. Calculat, i inversele matricelor, atıt cu metoda folosind matricea adjuncta, cıt s, i folosindmetoda lui Gauss:
(a) A =
⎛
⎜
⎜
⎝
1 0 −1
3 2 1
0 1 1
⎞
⎟
⎟
⎠
;
(b) B =
⎛
⎜
⎜
⎜
⎝
−1 2 4 1
3 0 1 4
0 1 1 0
2 1 0 1
⎞
⎟
⎟
⎟
⎠
;
(c) C =
⎛
⎜
⎜
⎝
1 1 2
0 1 0
0 0 −1
⎞
⎟
⎟
⎠
.
9
10
SEMINAR 2
SPAT, II VECTORIALE
2.1 De�nit, iiNot, iunea de spat, iu vectorial este una foarte importanta ın algebra, dar totodata ea face legatura
s, i cu geometria, oferind cadrul structural ın care se poate studia geometria analitica.In cele ce urmeaza, daca nu se speci�ca altfel, V o mult, ime nevida (pe care o vom ınzestra
cu structura de spat, iu vectorial), iar K va � corpul de baza (al scalarilor), ın practica luat cel maiadesea K = ℝ sau K = ℂ.
De�nitie 2.1: O aplicat, ie ' ∶ V × V → V , de�nita prin (x, y) ↦ '(x, y) ∈ V se numes, te lege decompozit, ie interna sau operat, ie algebrica pe V .
O aplicat, ie f ∶ K × V → V , de�nita prin (�, x) ↦ f (�, x) ∈ V se numes, te lege de compozit, ieexterna pe V .
Cu acestea, avem de�nit, ia fundamentala:
De�nitie 2.2: O mult, ime nevida V , ınzestrata cu doua legi de compozit, ie, una interna + ∶ V ×
V → V s, i alta externa ⋅ ∶ K ×V → V se numes, te spat, iu vectorial peste K sau K -spat, iu vectorial,notat pe scurt KV daca sınt ındeplinite axiomele:
(1) (V , +) este grup abelian, adica:
(a) (x + y) + z = x + (y + z), ∀x, y, z ∈ V ;(b) ∃0V ∈ V a.ı x + 0V = 0V + x = x, ∀x ∈ V ;(c) ∀x ∈ V , ∃(−x) ∈ V a.ı x + (−x) = (−x) + x = 0V ;(d) x + y = y + x, ∀x, y ∈ V
11

(2) Au loc:
(a) � ⋅ (x + y) = � ⋅ x + � ⋅ y, ∀� ∈ K, ∀x, y ∈ V ;(b) (� + �) ⋅ x = � ⋅ x + � ⋅ x, ∀�, � ∈ K, ∀x ∈ V ;(c) � ⋅ (� ⋅ x) = (��) ⋅ x, ∀�, � ∈ K, ∀x ∈ V ;(d) 1K ⋅ x = x, ∀x ∈ V .
In acest context, elementele corpului K se numesc scalari, iar elementele din V se numescvectori. Legea de compozit, ie externa se numes, te ınmult, irea vectorilor cu scalari. Daca K = ℝ sauℂ, spat, iul vectorial V se numes, te real sau, respectiv, complex.
Uneori, ın loc de ”spat, iu vectorial“ se mai poate spune ”spat, iu liniar“ sau, pe scurt, daca nuexista riscul de confuzie, vom spune simplu ”spat, iu“.
In general, pentru a nu complica notat, ia, nu vom face distinct, ie ın scris ıntre operat, iile dincorpul K , cele din V s, i legea externa. Insa trebuie avuta atent, ie, conform de�nit, iei, sa utilizamoperat, iile corespunzatoare.
Observatie 2.1: In situat, ii diverse, spat, iile vectoriale pot � de�nite peste corpuri necomutativeK , caz ın care ınmult, irea dintre un vector s, i un scalar sa �e permisa doar ın una dintre part, i sau,daca este permisa ın ambele, rezultatele sa nu coincida. Pentru acele situat, ii exista not, iunea despat, iu vectorial stıng, respectiv drept, notate KV s, i VK .
Deoarece ın aceasta lucrare vom avea nevoie doar de cazul comutativ, nu vom mai face pre-cizarea de �ecare data, dar vom lucra cu un corp comutativ de scalari, ceea ce face ca spat, iulvectorial sa �e bilateral.
Propozitie 2.1: Fie V un K -spat, iu vectorial. Au loc urmatoarele proprietat, i:
(a) (� − �) ⋅ x = � ⋅ x − � ⋅ x, ∀�, � ∈ K, ∀x ∈ V ;
(b) � ⋅ (x − y) = � ⋅ x − � ⋅ y, ∀� ∈ K, ∀x, y ∈ V ;
(c) 0K ⋅ x = 0V , ∀x ∈ V ;
(d) (−�) ⋅ x = � ⋅ (−x) = −� ⋅ x, ∀� ∈ K, ∀x ∈ V ;
(e) Daca � ⋅ x = 0V , atunci � = 0K sau x = 0V .
Demonstrat, ia propozit, iei este simpla s, i lasata ca exercit, iu, folosind axiomele din de�nit, ie.Primele exemple simple, dar foarte importante (prototipice, dupa cum vom vedea) sınt urmatoarele:
Exemplu 2.1: (1) K este un spat, iu vectorial peste el ınsus, i, cu operat, iile de corp, legea externaconfundındu-se cu cea interna.
12

(2) Mult, imeaK n= K ×K ×⋯×K = {(x1,… , xn) ∣ xi ∈ K}, undeK este un corp comutativ, este un
spat, iu vectorial peste K , numit spat, iul aritmetic, ın raport cu legile de compozit, ie pe componente,pentru x = (x1,… , xn), y = (y1,… , yn) ∈ K
n:
+ ∶ Kn× K
n→ K
n, x + y = (x1 + y1, x2 + y2,… , xn + yn);
⋅ ∶ K × Kn→ K
n, � ⋅ x = (�x1, �x2,… , �xn).
(3) Mult, imea matricelor m,n(K ) este un spat, iu vectorial peste K , operat, ia interna �ind adu-narea obis, nuita a matricelor, iar operat, ia de ınmult, ire cu scalari �ind cea corespunzatoare, princare se ınmult, esc toate elementele matricei cu scalarul respectiv.
(4) Fie mult, imea ℝ[X ]≤n = {p ∈ ℝ[X ] ∣ grad(p) ≤ n}. Aceasta mult, ime este un spat, iu vecto-rial real, cu operat, iile de adunare a polinoamelor s, i ınmult, ire cu scalari.
(5) Mult, imea solut, iilor unui sistem liniar s, i omogen formeaza un spat, iu vectorial peste corpulcoe�cient, ilor acestui sistem, K . Solut, iile unui sistem cum ecuat, ii s, i n necunoscute pot � privite caelemente din K
n, care se aduna s, i ınmult, esc cu scalari respectınd operat, iile din spat, iul aritmeticde mai sus. Datorita transformarilor elementare care produc matrice echivalente, rezultatul va �alcatuit tot din solut, ii ale sistemului.
Ca ın toate cazurile cınd introducem o noua structura, este de folos sa studiem substructuriale acesteia. As, adar, �e V un K -spat, iu vectorial s, i W ⊆ V o submult, ime nevida.
De�nitie 2.3: W se numes, te subspat, iu vectorial al lui V daca operat, iile algebrice pe V induc peW o structura de spat, iu vectorial peste K .
Vom nota W ≤K V .
Observatie 2.2: Condit, ia ca 0V ∈ W este una necesara pentru structura de subspat, iu, datoritastructurii subiacente de subgrup aditiv.
As, a cum ın cazul subgrupurilor, veri�carea substructurii se face printr-un rezultat ajutatormai degraba decıt prin de�nit, ie, s, i ın cazul spat, iilor vectoriale avem:
Propozitie 2.2: Daca W este o submult, ime nevida a K -spat, iului vectorial V , atunci urmatoarelea�rmat, ii sınt echivalente:
(1) W ≤K V ;
(2) ∀x, y ∈ W, ∀� ∈ K , avem x + y ∈ W s, i � ⋅ x ∈ W ;
(3) ∀x, y ∈ W, ∀�, � ∈ K , avem � ⋅ x + � ⋅ y ∈ W .
Propozit, ia poate � pusa sub forma:
W ≤K V ⟺ � ⋅ x + � ⋅ y ∈ W, ∀x, y ∈ W, �, � ∈ K.
Sa luam cıteva exemple corespunzatoare spat, iilor introduse mai sus:
13

Exemplu 2.2: (1) Mult, imea {0V} este un subspat, iu vectorial al lui V , numit subspat, iul nul. Deasemenea, V ≤K V , iar aceste doua exemple se numesc subspat, ii improprii, celelalte �ind proprii.
(2) Mult, imea ℝ[X ]≤n de�nita mai sus este un subspat, iu vectorial al spat, iului polinoamelor cucoe�cient, i reali.
(3) Submult, imeaW = {(x1, x2) ∣ 3x1−5x2 = 0} este un subspat, iu vectorial al spat, iului aritmeticℝ2. Ea poate � asimilata cu spat, iul solut, iilor unui sistem liniar s, i omogen cu o ecuat, ie s, i doua
necunoscute.
(4) In spat, iul aritmetic ℝ3, dreptele s, i planele care cont, in originea sınt subspat, ii vectoriale.In continuare, vom vedea cum putem obt, ine subspat, ii noi din unele deja existente, prin diverse
operat, ii permise.De�nitie 2.4: Fie V un K -spat, iu vectorial s, i V1, V2 doua subspat, ii ale sale. Mult, imea:
V1 + V2 = {x ∈ V ∣ x = x1 + x2, x1 ∈ V1, x2 ∈ V2}
se numes, te suma subspat, iilor V1 s, i V2.
Propozitie 2.3: Fie V un K -spat, iu vectorial s, i V1, V2 doua subspat, ii ale sale. Atunci:
(a) V1 ∩ V2 ≤K V ;
(b) V1 + V2 ≤K V .
Trebuie remarcat ca, ın general, reuniunea a doua subspat, ii nu este un subspat, iu vectorial.Pentru a pregati o noua operat, ii pe baza sumei, avem nevoie de urmatoarea:
Propozitie 2.4: Fie V1, V2 doua subspat, ii vectoriale ale K -spat, iului V . Orice vector din V se scrie ınmod unic ca suma dintre un vector din V1 s, i unul din V2 daca s, i numai daca V1 ∩ V2 = {0V}.
Pe baza acesteia, introducem:De�nitie 2.5: Fie V1, V2 ≤K V , cu V1 ∩ V2 = {0V}. Suma V1 + V2 se numes, te suma directa s, i senoteaza V1 ⊕ V2. In acest caz, subspat, iile V1 s, i V2 se numesc suplementare
Un exemplu care ne arata utilizarea spat, iilor vectoriale pornind de la o problema ”normala“este urmatorul. Orice funct, ie f ∶ (−a, a) → ℝ este suma dintre o funct, ie para s, i una impara:
f (x) =
1
2[f (x) + f (−x)] +
1
2[f (x) − f (−x)], ∀x ∈ (−a, a).
Mai mult, singura funct, ie care este simultan para s, i impara este funct, ia nula. Rezulta de aicica subspat, iul funct, iilor pare s, i subspat, iul funct, iilor impare sınt suplementare. In prealabil, artrebui notat ca mult, imea (ℝ) = {f ∶ ℝ → ℝ} de funct, ii reale formeaza un spat, iu vectorial real,operat, iile �ind cele punctuale:
(f + g)(x) = f (x) + g(x), (� ⋅ f )(x) = � ⋅ f (x), ∀f , g ∈ F(ℝ), ∀�, x ∈ ℝ.
14

De�nitie 2.6: Fie V un K -spat, iu vectorial s, i S = {x1,… , xn} ⊆ V o submult, ime nevida a lui V :Un vector de forma:
v = �1x1 + �2x2 +⋯ + �n ⋅ xn, �i ∈ K, xi ∈ S, ∀i
se numes, te combinat, ie liniara �nita de elemente din S. Se noteaza, folosind terminologia engleza,Sp(S)
1sau, ın unele cazuri, ⟨S⟩K .
2
Din de�nit, ie, se vede imediat ca are loc:
Propozitie 2.5: Cu notat, iile s, i contextul de mai sus, Span(S) este subspat, iu vectorial al lui V . El semai numes, te subspat, iul generat de S sau acoperirea liniara a lui S.
Se pot demonstra s, i observa cu us, urint, a urmatoarele:
Observatie 2.3: (1) S = ∅ ⟹ Span(S) = {0V};
(2) V1 + V2 = Span(V1 ∪ V2);
(3) Span(S) este intersect, ia tuturor subspat, iilor lui V ce cont, in pe S;
(4) Diferite submult, imi de vectori din V pot avea aceeas, i acoperire liniara.
Ne pregatim pentru introducerea unei not, iuni fundamentale pentru spat, ii vectoriale, anumeaceea de baza. Dar mai ıntıi, avem nevoie de alte preliminarii.
De�nitie 2.7: Pastrınd notat, iile s, i contextul de mai sus, sistemul de vectori S se numes, te liniarindependent sau liber daca din egalitatea ∑
i�ixi = 0V , cu �i ∈ K rezulta cu necesitate ca tot, i
�i = 0.Sistemul se numes, te liniar dependent sau legat daca exista �i , nu tot, i nuli, astfel ıncıt ∑
i�ixi =
0V .
Cu acestea, avem:
Propozitie 2.6: Fie K -spat, iul vectorial V s, i submult, imea S = {x1, x2,… , xn} ⊆ V .
(a) Daca 0V ∈ S, atunci S este liniar dependent;
(b) Daca S este liniar independent, atunci xi ≠ 0V , ∀i;
(c) Daca S este liniar dependent, atunci pentru orice S′ ⊆ V , S ⊆ S′, rezulta ca S′ este liniar depen-dent;
(d) Daca S este liniar independent, atunci pentru orice S′′ ⊆ S, rezulta ca S′′ este liniar independent.2de la englezescul span, adica acoperire, ıntindere
15

Demonstratie. (a) Fie xn = 0V ∈ S. Deoarece are loc egalitatea:
0 ⋅ x1 + 0 ⋅ x2 +⋯ + 1 ⋅ xn = 0V ,
care nu are tot, i coe�cient, ii nuli, rezulta ca S este liniar dependent.(b) Daca xi = 0V ∈ S, atunci, conform punctului anterior, S este liniar dependent, care este o
contradict, ie.(c) Deoarece S este liniar dependent, rezulta ca exista o combinat, ie liniara nula, care nu are
tot, i coe�cient, ii nuli. Atunci putem mari oricıt aceasta combinat, ie liniara, adaugınd scalari nulipentru tot, i ceilalt, i vectori s, i rezulta ca, oricum am mari pe S, obt, inem un sistem liniar dependent.
(d) Daca S′′ ar � liniar dependent, atunci s, i S ar trebui sa �e liniar dependent, din subpunctulanterior, contradict, ie.
Pastrınd notat, iile s, i contextul, avem:De�nitie 2.8: Mult, imea S se numes, te sistem de generatori pentru V daca orice vector x ∈ V seexprima ca o combinat, ie liniara de vectori din S. In acest caz, spat, iul vectorial V se numes, te �nitgenerat, deoarece S cont, ine un numar �nit de elemente.
De exemplu, folosind s, i intuit, ia geometrica, avem ca mult, imea S = {(1, 0), (0, 1)} este un sistemde generatori pentru planul ℝ2.
Operat, iile permise asupra unui sistem de generatori, care sa-l faca sa ramına sistem de gene-ratori sınt prezentate ın rezultatul urmator.Propozitie 2.7: FieK -spat, iul vectorialV s, i S = {x1,… , xn} ⊆ V un sistem de generatori. Urmatoareleoperat, ii transforma sistemul S ıntr-un nou sistem S
′, care ramıne sistem de generatori pentru V :
(a) schimbarea ordinii vectorilor din S;
(b) ınmult, irea unui vector din S cu un scalar nenul;
(c) adaugarea la un vector din S a unui alt vector din S, ınmult, it, eventual, cu un scalar nenul.
Demonstrat, ia este evidenta s, i se bazeaza pe ”stabilitatea“ spat, iilor vectoriale la combinat, iiliniare.Teorema 2.1 (Teorema schimbului): Fie V un K -spat, iu vectorial, S = {u1, u2,… , us} un sistemliniar independent din V s, i S′ = {v1,… , vm} un sistem de generatori pentru V . Atunci s ≤ m s, i,dupa o eventuala reindexare a vectorilor din S′, sistemul:
S′′= {u1, u2,… , us , vs+1,… , vm}
este tot un sistem de generatori pentru V .
Demonstrat, ia se poate face simplu prin induct, ie dupa s.Din aceasta teorema rezulta ca, ıntr-un spat, iu vectorial �nit generat, orice sistem de vectori
liniar independent, i are mai put, ine elemente decıt orice sistem de generatori. In plus, ın oricesistem de generatori, se pot ınlocui vectorii cu alt, ii, liniar independent, i, fara ca proprietatea de a� sistem de generatori a sistemului sa �e afectata.
16
2.2 Baza s, i dimensiuneAjungem, ın sfırs, it, la elementul fundamental din studiul spat, iilor vectoriale, anume not, iunea
de baza, care ne va permite sa extragem toate informat, iile relevante ın studiul spat, iilor vectoriale.
De�nitie 2.9: Fie V un K -spat, iu vectorial. Un sistem de vectori ⊆ V se numes, te baza ın V
daca este simultan un sistem liniar independent s, i sistem de generatori pentru V .
De exemplu, ın spat, iul aritmetic K n, mult, imea B = {e1,… , en}, unde ei este un s, ir de n zerouri,cu elementul 1 pe pozit, ia i este o baza, denumita baza canonica.
In spat, iul real al polinoamelor cu coe�cient, i reali s, i de grad cel mult n, notat ℝ[X ]≤n, mult, imeaB = {1, X , X
2,… , X
n} este o baza.
In spat, iul vectorial al matricelor de tip (m, n) cu elemente din K , o baza este data de matriceleEij = (eij), care au 1 la intersect, ia linei i cu coloana j s, i zero ın rest.
De�nitie 2.10: Un spat, iu vectorial V se numes, te �nit dimensional daca admite o baza �nita. Incaz contrar, el se numes, te in�nit dimensional.
Un rezultat foarte important este urmatorul:
Propozitie 2.8: Orice doua baze dintr-un K -spat, iu vectorial �nit dimensional au acelas, i numar deelemente.
Demonstrat, ia rezulta imediat din teorema schimbului, aplicata pentru doua din bazele spat, iului.Datorita acestui rezultat, avem:
De�nitie 2.11: Numarul comun de elemente ale tuturor bazelor unui spat, iu vectorialV se numes, tedimensiune a spat, iului, notata dimKV .
Din exemplele de mai sus, rezulta ca dimℝ ℝ[X ]≤n = n + 1 s, i dimℝm,n(K ) = m ⋅ n.De asemenea, din proprietat, ile s, i not, iunile de pına acum, avem imediat:
Propozitie 2.9: Fie V un K -spat, iu vectorial �nit dimensional s, i B = {x1,… , xn} o submult, ime a sa.Atunci B este o baza ın V daca s, i numai daca orice vector din V are o exprimare unica sub formaunei combinat, ii liniare de vectori din B.
Demonstratie. Daca B este baza, atunci B este sistem de generatori pentru V . Rezulta ca oricevector din V poate � scris ca o combinat, ie liniara de elemente din B. Unicitatea reprezentarii seobt, ine astfel: �e x = ∑
i�ixi = ∑ �ixi doua scrieri diferite pentru x . Atunci ∑(�i − �i) ⋅ xi = 0 s, i,
deoarece B este s, i sistem liniar independent, avem �i = �i , pentru orice i.Reciproc, din ipoteza, avem caB este sistem de generatori pentruV . Pentru a arata independent, a
liniara, consideram o combinat, ie liniara nula. Dar s, i vectorul nul poate � scris ca o combinat, ieliniara a vectorilor din B, cu scalari nuli. Din unicitatea reprezentarii vectorului 0V , rezulta ca tot, iscalarii din prima combinat, ie sınt egali cu cei dintr-a doua, adica nuli.
17
De�nitie 2.12: Fie V un K -spat, iu vectorial s, i B o baza a sa. Fie x ∈ V , scris ın baza B subforma x = ∑
i�ixi . Scalarii (unici) �i ∈ K se numesc coordonatele vectorului x ın baza B. Funct, ia
bijectiva f ∶ V → Kn, care asociaza unui vector coordonatele sale ıntr-o baza se numes, te sistem
de coordonate.
Urmatorul rezultat ne poate ajuta sa gasim o baza ıntr-un spat, iu vectorial �nit dimensional.
Propozitie 2.10: Fie V un K -spat, iu vectorial de dimensiune n. Atunci:
(a) Orice sistem liniar independent are cel mult n vectori;
(b) Orice sistem liniar independent care are exact n vectori este baza;
(c) Orice sistem de generatori are cel put, in n vectori;
(d) Orice sistem de generatori care are exact n vectori este baza.
De asemenea, avem s, i:
Teorema 2.2: Fie V un K -spat, iu vectorial de dimensiune n s, i S = {x1, x2,… , xk}, cu k ≤ n osubmult, ime a sa, liniar independenta. Atunci exista vectorii {xk+1,… , xk+p} astfel ıncıt mult, imea{x1,… , xk+p} sa formeze o baza, cu k + p = n.
Din aceste ultime doua rezultate, obt, inem:
Observatie 2.4: (a) Din orice sistem liniar independent se poate extrage o baza.
(b) Orice sistem de generatori poate � completat la o baza.
Date doua subspat, ii ale unui spat, iu vectorial, ele contribuie la dimensiunea spat, iului as, a cumarata urmatorul rezultat.
Teorema 2.3 (H. Grassmann): Daca V1 s, i V2 sınt doua subspat, ii vectoriale aleK -spat, iului vectorial�nit dimensional V , atunci:
dimK V1 + dimK V2 = dimK (V1 + V2) + dimK (V1 ∩ V2).
2.3 Matricea unei aplicat, ii liniareStrınsa legatura ıntre aplicat, ii liniare s, i matrice, care justi�ca s, i important, a studiului aprofundatal exemplului dat de spat, iul vectorial Mn(ℝ) consta ın faptul ca oricarei aplicat, ii liniare i se poateasocia o matrice, ıntr-o baza a spat, iului vectorial. Aceasta se de�nes, te s, i se calculeaza foartesimplu:
18

De�nitie 2.13: Fie V ,W doua K -spat, ii vectoriale s, i �e B1 = {ei}i∈I o baza a lui V , iar B2 = {fj}j∈J
o baza a lui W .Fie f ∶ V → W o aplicat, ie liniara. Atunci, pentru orice vector v ∈ V , f (v) ∈ W , deci se poate
scrie ın baza B2. In particular, pentru v ∈ B1, obt, inem:
f (ei) = ∑
j
�ijfj .
Matricea A = (�ij)i,j se numes, te matricea aplicat, iei f ın baza B2.
De exemplu: �e V = ℝ3 s, i W = ℝ
2. Luam bazele canonice:
B1 = {(1, 0, 0), (0, 1, 0), (0, 0, 1)}
B2 = {(1, 0), (0, 1)}.
De�nim o aplicat, ie liniara:
f ∶ ℝ3→ ℝ
2, f (x1, x2, x3) = (x1 + x2, 2x2 + 3x3).
Pentru a calcula matricea lui f ın baza B2, avem:
f (e1) = f (1, 0, 0) = (1, 0) = 1 ⋅ e1 + 0 ⋅ e2
f (e2) = f (0, 1, 0) = (1, 2) = 1 ⋅ e1 + 2 ⋅ e2
f (e3) = f (0, 0, 1) = (0, 3) = 0 ⋅ e1 + 3 ⋅ e2.
Matricea se obt, ine acum din scalarii care sınt coe�cient, i ın expresia de mai sus:
A = MB2(f ) =
⎛
⎜
⎜
⎝
1 0
1 2
0 3
⎞
⎟
⎟
⎠
.
Observatie 2.5: In unele cazuri, se lucreaza cuAt , deci coe�cient, ii sınt pus, i pe coloane ın matriceaaplicat, iei liniare. Urmarit, i convent, ia de la curs, pe care o vom folosi.
Cu aceasta legatura, multe din proprietat, ile mor�smelor de spat, ii vectoriale pot � transferatestudiului matriceal. In particular, calculul valorii aplicat, iei liniare ıntr-un vector oarecare coincidecu ınmult, irea matricei aplicat, iei liniare cu vectorul linie (sau coloana) respectiv. Avem s, i:
Exercit, iu: Fie A ∈ Mn(ℝ) o matrice nenula, dar cu det(A) = 0. Sa se arate ca exista o matriceB ∈ Mn(ℝ), nenula, dar cu AB = 0n.
Solut, ie: Reformulam problema ın context de spat, ii vectoriale. As, adar, lucram ın spat, iul vec-torial ℝn
2 , iar matricea A este gındita ca matrice a unei aplicat, ii liniare f ∶ ℝn2
→ ℝn2 .
Proprietate importanta: Deoarece det(A) = 0, deci A nu este inversabila, rezulta ca mor�smulf nu este injectiv. Demonstram prin reducere la absurd. Fie x ∈ ℝ
n2 . Atunci a calcula f (x) este
19

echivalent cu a ınmult, i matricea A cu vectorul coloana x . Presupunem ca avem f (x) = f (y),pentru doi vectori x, y ∈ ℝ
n2 . Matriceal, avem AX = AY . Dar, deoarece A nu este inversabila, nu
o putem reduce pentru a concluziona ca X = Y . As, adar, f nu este injectiva.Dar, daca f nu este injectiva, ınseamna ca Ker(f ) nu cont, ine doar vectorul nul. In particular,
rezulta ca exista un vector nenul b ∈ Ker(f ), cu f (b) = 0Rn2 . Trecınd la matrice, vectorul b
corespunde unei matrice nenule B, astfel ıncıt f (B) = AB = 0n.
Am demonstrat, astfel, part, ial exercit, iul. Pentru a �naliza demonstrat, ia, aratat, i s, i:Exercit, iu: Orice mor�sm injectiv este inversabil la dreapta. Adica, daca f ∶ A → B este un
mor�sm injectiv (de grupuri, spat, ii vectoriale, sau chiar funct, ie), exista g ∶ B → A, astfel ıncıtf ◦g = Id, mor�smul identitate.
Deducet, i, ın exercit, iul anterior, ca putem gasi chiar B ∈ Mn(ℝ) cu proprietatea din enunt, .(Indicat, ie: considerat, i g o posibila inversa la dreapta a lui f , �e B matricea lui g ın baza canonicas, i deducet, i ca (f ◦g)(v) = ABV .)
2.4 Matricea de trecere (schimbare de baza)Date mai multe baze ale unui spat, iu vectorial, sıntem interesat, i de schimbarea de coordonate alevectorilor. Fie, pentru aceasta, un K -spat, iu vectorial V de dimensiune n s, i B1 = {u1,… , un}, B2 =
{v1,… , vn} baze ın V .Orice vector din B2 se poate exprima unic ın funct, ie de vectorii bazei B1, deci vi = ∑
jcjiuj .
Acest sistem de�nes, te o matrice patratica de ordin n, M = (cij) ∈ n(K ), transpusa coe�cient, ilor.Fie B1 s, i B2 matricele-coloana cu elemente din cele doua baze. Atunci, folosind ecuat, ia de mai
sus, relat, ia de legatura dintre vectorii celor doua baze poate � scrisa matriceal:
B2 = MT⋅ B1.
De�nitie 2.14: Matricea M , astfel determinata, se numes, te matricea de trecere de la baza B1 labaza B2.
Pentru schimbarea coordonatelor, avem:
Teorema 2.4 (Schimbarea coordonatelor): Daca M este matricea de trecere de la baza B1 la bazaB2, iar X1, respectiv X2 sınt vectorii coloana ai coordonatelor unui vector x ∈ V ın bazele B1, respectivB2, atunci:
X2 = M−1⋅ X1.
In particular, rezulta ca matricea de trecere M este inversabila.
De�nitie 2.15: Fie T ∈ L(V ,W ). Se numes, te rangul lui T , notat rang(T ), dimensiunea subspat, iuluiIm(T ).
Se numes, te defectul lui T , notat def(T ), dimensiunea subspat, iului Ker(T ).
20

Teorema 2.5 (Teorema rang-defect): Fie V s, i W doua spat, ii vectoriale peste acelas, i corp comutativK , cu dimK V = n s, i �e T ∈ L(V ,W ). Atunci:
rang(T ) + def(T ) = n.
2.5 Exercit, ii1. Fie a ∈ ℝ �xat. Sa se stabileasca daca legile de compozit, ie:
⊕ ∶ ℝ × ℝ → ℝ, x ⊕ y = x + y − a
⊗ ∶ ℝ × ℝ → ℝ, � ⊗ x = �x + (1 − �)a
determina o structura de spat, iu vectorial real pe mult, imea ℝ.
2. Sa se arate ca mult, imea (0,∞) este un spat, iu vectorial real ın raport cu legile de compozit, ie:
⊕ ∶ (0,∞) × (0,∞) → (0,∞)x ⊕ y = xy
⊙ ∶ ℝ × (0,∞) → (0,∞), � ⊙ x = x�.
3. Sa se arate ca mult, imea
S = {(� − 2� ; � + 3� ; �) ∣ �, � ∈ ℝ}
este un subspat, iu vectorial al spat, iului vectorial realℝ3. Determinat, i o baza ın S, precum s, i dimℝ S.
4. Se considera mult, imea:
L =
{
A ∈ M2,3(ℝ) ∣ A =(
x 0 y
0 u z), x, y, z, u ∈ ℝ, x = y + z
}
(a) Sa se arate ca L este un subspat, iu vectorial al lui M2,3(ℝ);
(b) Determinat, i o baza ın L, precum s, i dimℝ L.
5. Se considera sistemul omogen:{
x1 − 2x2 + 3x3 + x4 = 0
2x1 − x2 + x3 − x4 = 0
21
Sa se rezolve sistemul. Sa se arate ca mult, imea solut, iilor sistemului este un subspat, iu vectorial allui ℝ4. Determinat, i o baza ın subspat, iul solut, iilor.
6. Sa se arate ca sistemul de vectori {v1,… , v4} din ℝ3 este liniar dependent, unde:
v1 = (1, 1, 0), v2 = (1, 0, 1), v3 = (0, 1, 1), v4 = (1, 1, 1).
7. Sa se stabileasca daca vectorul v = (4, −2, 0, 3) din spat, iul vectorial real ℝ4 este o combinat, ieliniara a vectorilor v1 = (3, 9, −4, −2), v2 = (2, 3, 0, −1), v3 = (2, −1, 2, 1).
8. In ℝ[X ]≤2, spat, iul polinoamelor reale de grad cel mult 2, sa se gaseasca coordonatele polino-mului p(x) = 3x
2−x +4 ın raport cu baza B formata din p1(x) = x2−1, p2(x) = 2x +1, p3(x) = x
2+3.
9. In spat, iul vectorial real ℝ3 se considera baza canonica:
B = {(1, 0, 0), (0, 1, 0), (0, 0, 1)}
s, i o alta baza:B′= {(1, 2, 1), (1, −1, 0), (3, 1, −2)}.
Sa se determine matricea de trecere de la baza B la baza B′, precum s, i coordonatele vectoruluiv = (2, 3, −5) ın baza B′.
10. Fie V ,W doua spat, ii vectoriale s, i f ∶ V → W o aplicat, ie liniara.A Aratat, i ca Ker(f ) =
{x ∈ V ∣ f (x) = 0W } este un subspat, iu al lui V , iar Im(f ) = {y ∈ W ∣ ∃x ∈ V a.ı f (x) = y} estesubspat, iu al lui W .
11. Fie V s, i W doua K -spat, ii vectoriale. Dat, i exemplu de astfel de spat, ii s, i de o aplicat, ief ∶ V → W care sa �e mor�sm ıntre grupurile aditive (V , +) s, i (W, +), dar sa nu �e K -liniara.
12. In spat, iul vectorial real ℝ3 se considera vectorii:
v1 = (1, 2, 3), v2 = (2, 3, 1), v3 = (� + 3, � + 1, � + 2), � ∈ ℝ.
Sa se determine � , s, tiind ca vectorii sınt liniar dependent, i.
22

13. Fie f ∶ ℝ3→ ℝ
4, f (x1, x2, x3) = (x1 + x2, x2 − x3, x1 + x3, 2x1 + x2).
(a) Aratat, i ca f este mor�sm de spat, ii vectoriale;
(b) Determinat, i Ker(f );
(c) Determinat, i matricea aplicat, iei liniare ın baza canonica.
(d) Veri�cat, i teorema rang-defect.
14. Fie f ∶ ℝ4→ ℝ
2, f (x1, x2, x3, x4) = (2x1 − x2 − x3, x1 + 3x2 + x4).
(a) Aratat, i ca f este mor�sm de spat, ii vectoriale.
(b) Determinat, i matricea aplicat, iei f ın baza canonica.
(c) Determinat, i Ker(f ) s, i Im(f ).
(d) Veri�cat, i teorema rang-defect.
15. Dat, i exemplu de un K -spat, iu vectorial V s, i o submult, imea W ⊆ V care sa �e subgrup allui (V , +), dar sa nu �e subspat, iu vectorial al lui V .
16. Fie V un K -spat, iu vectorial s, i S = {v1,… , vn} o mult, ime de vectori din V . Fie f ∶ V → W
o aplicat, ie liniara. Notam cu f (S) imaginea mult, imii S prin mor�smul f , deci f (S) = {f (vi)}.Aratat, i ca:
(a) Daca S este liniar dependenta ın V , atunci f (S) este liniar dependenta ın W ;
(b) Daca S este liniar independenta ın V s, i f este injectiva, atunci f (S) este liniar independentaın W ;
(c) Daca S este sistem de generatori ın V s, i f este surjectiv, atunci f (S) este sistem de generatoriın W ;
(d) Daca S este baza ın V s, i f este bijectiv, atunci f (S) este baza ın W . Deducet, i de aici ca oricedoua spat, ii vectoriale izomorfe au aceeas, i dimensiune.
23
2.6 Exercit, ii suplimentare. Teorema lui Grassmann1. Determinat, i o baza s, i dimensiunea urmatoarelor spat, ii vectoriale:
(a) V1 = {(x, y, z) ∈ ℝ3∣ 3x + y = 0};
(b) V2 = {(x, y, z) ∈ ℝ3∣ x = 0};
(c) V3 = {(x, y, z) ∈ ℝ3∣ 3x + y = z, x + 2z = y};
(d) V4 = {p ∈ ℝ2[X ] ∣ p(0) = 0};
(e) V5 = {p ∈ ℝ2[X ] ∣ p′(0) = 0};
(f) V6 = {A ∈ M2(ℝ) ∣ tr(A) = 0};
(g) V7 = {A ∈ M2(ℝ) ∣ A = At};
(h) V8 = Sp{v1 = (−1, 1, 2), v2 = (3, 0, 0)};
(i) V9 = Sp{v = (−1, 1, 1)};
(j) V10 = Sp{v1 = (1, 1, 1), v2 = (2, 2, 2)};
(k) V11 = Sp{X + 1, X2+ 1};
(l) V12 = Sp{X2+ x, X + 1, 3X − 2}.
2. Pentru aplicat, iile liniare urmatoare, determinat, i:
(i) matricea ın baza canonica;
(ii) nucleul s, i imaginea, cu baze s, i dimensiuni;
(iii) precizat, i daca aplicat, iile sınt injective sau surjective.
(a) f ∶ ℝ3→ ℝ
3, f (x, y, z) = (x + y + z, x − y − z, 3z);
(b) f ∶ ℝ3→ ℝ
3, f (x, y, z) = (x + y, x + y, x + y);
(c) f ∶ ℝ3→ ℝ
3, f (x, y, z) = (x + y, 2x + 2y, z);
(d) f ∶ ℝ3→ ℝ
3, f (x, y, z) = (x − y, y − x, 3z − x);
(e) f ∶ ℝ3→ ℝ
2, f (x, y, z) = (x − y − z, x + y + z);
24

(f) f ∶ ℝ3→ ℝ
2, f (x, y, z) = (x + y + z, 3z):
(g) f ∶ ℝ3→ ℝ
2, f (x, y, z) = (x, y);
(h) f ∶ ℝ2→ ℝ
3, f (x, y, z) = (x, y, x + y);
(i) f ∶ ℝ2→ ℝ
3, f (x, y) = (3x, y, x + y);
(j) f ∶ ℝ2→ ℝ2[X ], f (x, y) = 3x + 4yX + xX
2;
(k) f ∶ ℝ2[X ] → ℝ2, f (a + bX + cX
2) = (a + c, b);
(l) f ∶ ℝ2[X ] → M2(ℝ), f (a + bX + cX2) =
(
a b + c
b a − c);
(m) f ∶ M2(ℝ) → ℝ2[X ], f(
a b
c d)= (a + c) + (b + d)X + (c − d)X
2.
2.7 Teorema lui GrassmannFie V1, V2 doua subspat, ii ale unui K -spat, iu vectorial V .
De�nitie 2.16: Se de�nes, te suma subspat, iilor V1 s, i V2 prin:
V1 + V2 = {v ∈ V ∣ ∃v1 ∈ V1, v2 ∈ V2, v = v1 + v2}.
Daca V1 ∩ V2 = {0V}, suma se numes, te directa s, i se noteaza V1 ⊕ V2.Daca V1 ⊕ V2 ≃ V , atunci V1 se numes, te complementul lui V2 ın V , iar V2 se numes, te comple-
mentul lui V1 ın V .
O proprietate importanta a sumei directe este:
Teorema 2.6: Daca V = V1 ⊕ V2, atunci pentru orice vector v ∈ V , exista componentele unicev1 ∈ V1, v2 ∈ V2 astfel ıncıt v = v1 + v2.
Cu alte cuvinte, ın cazul unei sume directe, orice vector din suma se proiecteaza unic pe cele douacomponente.
Teorema 2.7 (H. Grassmann): Fie V1, V2 ≤K V ca mai sus. Atunci are loc:
dim(V1 + V2) = dimV1 + dimV2 − dim(V1 ∩ V2).
In particular:dim(V1 ⊕ V2) = dimV1 + dimV2.
Rezulta ca, daca B1 este o baza ın V1, iar B2 este o baza ın V2, atunci:
25

• B1 ∪ B2 este o baza ın V1 + V2;
• B1 ∩ B2 este o baza ın V1 ∩ V2.
Observatie 2.6: Deoarece V1 + V2 ≤K V (demonstrat, i!), rezulta ca:
dim(V1 + V2) ≤ dimV .
2.8 Exercit, ii Grassmann3. In continuarea exercit, iului 1 de mai sus:
(a) Determinat, i, cu baza s, i dimensiune subspat, iile:
• V1 + V2, V1 ∩ V2;• V2 + V3, V2 ∩ V3;• V4 + V5, V4 ∩ V5;• V8 + V2, V8 ∩ V2;• V9 + V10, V9 ∩ V10;• V11 + V5, V11 ∩ V5;• V12 + ℝ2[X ], V12 + ℝ2[X ].
(b) Decidet, i care dintre sumele de mai sus sınt directe.
4. In continuarea exercit, iului 2 de mai sus, daca notam, ın general, aplicat, ia liniara f ∶ V →
W :
(a) Gasit, i un subspat, iu V ′ al lui V astfel ıncıt Kerf ⊕ V ′ sa �e izomorf cu V ;
(b) Gasit, i un subspat, iu W ′ al lui W astfel ıncıt Imf ⊕ W ′ sa �e izomorf cu W .
Cu alte cuvinte, gasit, i complementul lui Kerf ın V s, i complementul lui Imf ın W .
26
SEMINAR 3
VECTORI S, I VALORI PROPRII.DIAGONALIZARE
3.1 Vectori s, i valori propriiFie V un K -spat, iu vectorial s, i f ∶ V → V o aplicat, ie liniara.
De�nitie 3.1: Un vector v ∈ V se numes, te vector propriu (eng. eigenvector) pentru aplicat, ia fdaca exista un scalar � ∈ K astfel ıncıt f (v) = �v.
In acest caz, � se numes, te valoarea proprie (eng. eigenvalue) asociata vectorului propriu v.
Rezulta ca vectorii proprii sınt aceia pentru care aplicat, ia liniara are o act, iune simpla, de
”rescalare“, adica doar de ınmult, ire cu un scalar, care se numes, te valoarea proprie asociata.Pas, ii pentru calculul vectorilor s, i valorilor proprii sınt:
(1) Presupunem dimV = n. Scriem matricea aplicat, iei f ın baza canonica a lui V s, i obt, inemA = M
B
f∈ Mn(K );
(2) Scriem polinomul caracteristic al matricei, anume:
P (x) = det(A − x ⋅ In).
(3) Radacinile polinomului caracteristic sınt valorile proprii ale endomor�smului f . Mult, imeavalorilor proprii se mai numes, te spectrul endomor�smului s, i se noteaza � (f ).
(4) Pentru a gasi vectorii proprii asociat, i �ecarei valori proprii �i , se rezolva ecuat, ia f (vi) = �ivis, i se determina vi ∈ V .
Alte elemente de terminologie:
27

De�nitie 3.2: Fie � o valoare proprie a unui endomor�sm f , iar v, vectorul propriu asociat.Notam V (�) = V� = Sp(v) subspat, iul lui V generat de v, numit subspat, iul invariant (propriu)
asociat lui v.Dimensiunea acestui subspat, iu se numes, te multiplicitatea geometrica a valorii proprii, notata
mg(�) = g(�) = dimV (�).Se numes, te multiplicitatea algebrica a valorii proprii �, notata ma(�) = a(�), multiplicitatea
radacinii x = � ın polinomul caracteristic. Adica a(�) = n ⇔ PA(x) ⋮ (x − �)n.
O proprietate importanta este:
Teorema 3.1 (Cayley-Hamilton): PA(A) = 0, unde A este polinomul caracteristic al matricei A.
3.2 Matrice de trecere. DiagonalizarePutem avea doua sau mai multe baze ale aceluias, i spat, iu vectorial, iar ıntre ele exista o legaturastrınsa, matriceala.
Fie B = {b1,… , bn} s, i C = {c1,… , cn} doua baza ale aceluias, i spat, iu vectorial V . Se numes, tematricea de trecere de la baza B la baza C , notata MC
Bsau B
MC , matricea coe�cient, ilor din scrierea
vectorilor ci ın funct, ie de vectorii bi . Mai precis, deoarece B este baza, avem:
∀i, j, ci = ∑
j
�ijbj ,
iar matricea de trecere este matricea (�ij).
De�nitie 3.3: O matrice A ∈ Mn(K ) se numes, te diagonalizabila daca ea este asemenea cu omatrice diagonala D, care are elemente nenule doar pe diagonala principala.
Altfel spus, exista T ∈ Mn(K ) inversabila, cu T −1AT = D.
Observatie 3.1: Daca matricea A este diagonalizabila, atunci D din de�nit, ia de mai sus cont, inepe diagonala doar valorile proprii ale lui A.
Condit, iile necesare s, i su�ciente pentru diagonalizare sınt:
Teorema 3.2: Urmatoarele a�rmat, ii sınt echivalente:
(a) Matricea A este diagonalizabila;
(b) Exista o baza a spat, iului vectorial V formata doar din vectorii proprii ai lui A;
(c) a(�i) = g(�i), ∀�i ∈ � (A).
Evident, discut, ia are sens atıt pentru cazul ın care pornim cu o aplicat, ie liniara, caz ın care ıiluam matricea ın baza canonica s, i lucram cu ea, cıt s, i daca pornim direct cu o matrice.
Pas, ii pentru diagonalizare sınt:
28

(1) Fixam o baza B a lui V (e.g. baza canonica) s, i scriem A = MB
f;
(2) Determinam valorile proprii �i ale lui A s, i multiplicitat, ile lor geometrice;
(3) Pentru �ecare valoare proprie, determinam vectorii proprii, subspat, iile invariante, cıte o bazaBi ın �ecare dintre acestea s, i multiplicitat, ile geometrice;
(4) Daca exista o valoare proprie �j cu a(�j) ≠ g(�j), algoritmul se opres, te s, i matricea nu se poatediagonaliza;
(5) Daca a(�i) = g(�i), ∀i, matricea se poate diagonaliza, iar B′= ∪iBi este o baza a lui V , formata
numai din vectori proprii;
(6) Se determina matricea de trecere de la baza B la baza B′, notata T , care este inversabila, iarforma diagonala este:
A ∼ T−1AT = diag(�i).
Observatie 3.2: Unul dintre avantajele diagonalizarii matricelor este us, urint, a calculelor ulteri-oare. In particular, daca A = diag(�i), atunci Ak
= diag(�k
i), ∀k.
3.3 Exercit, ii1. Sa se determine vectorii s, i valorile proprii pentru matricele:
A =(
1 0
8 2), B =
⎛
⎜
⎜
⎝
0 2 2
2 0 −2
2 −2 0
⎞
⎟
⎟
⎠
, C =
⎛
⎜
⎜
⎝
0 1 −2
1 1 1
1 −1 −1
⎞
⎟
⎟
⎠
.
2. Fie aplicat, ia liniara f ∶ ℝ3→ ℝ
3, f (x, y, z) = (−y, x, z).
Sa se calculeze vectorii s, i valorile proprii ale lui f .
3. Aceeas, i cerint, a pentru:
f ∶ ℝ3→ ℝ
3, f (x, y, z) = (x − z, 8x + y − 2z, z).
4. Fie aplicat, ia liniara f ∶ M2(ℝ) → M2(ℝ), de�nita prin:
f(
a b
c d)=(
2a + b + d 2b + 4c + 5d
2c + d 8d ).
Sa se arate ca f nu este diagonalizabila.
29

5. Sa se diagonalizeze endomor�smul:
f ∶ ℝ3→ ℝ
3, f (x, y, z) = (y + z, x + z, x + y).
6. Sa se diagonalizeze matricele:
A =
⎛
⎜
⎜
⎝
7 2 −2
2 4 −1
−2 −1 4
⎞
⎟
⎟
⎠
, B =(
1 1
4 1), C =
⎛
⎜
⎜
⎝
11 −5 5
−5 3 −3
5 −3 3
⎞
⎟
⎟
⎠
.
7. Determinat, i vectorii s, i valorile proprii pentru aplicat, ia:
f ∶ ℝ3→ ℝ
3, f (a, b, c) = (a − b + c, b, b − c).
30
SEMINAR 4
MODELE DE PART, IAL
4.1 Model 11. Fie spat, iile vectoriale:
V1 = {(x, y, z) ∈ ℝ3∣ 3x + y = 0}
V2 = Sp{(1, −1, 1), (2, −1, 1)}.
(a) Sa se determine, cu baza s, i dimensiune, V1, V2;Raspuns: dimV1 = dimV2 = 2. Baza ın V2 poate � luata ca �ind cei doi vectori dat, i, iar ın V1
avem, de exemplu, {(1, −3, 0), (0, 0, 1)}.
(b) Sa se determine, cu baza s, i dimensiune, V1 ∩ V2, respectiv V1 + V2. Decidet, i daca suma V1 + V2
este directa;Raspuns: dim(V1 + V2) = 3 ⇒ dim(V1 ∩ V2) = 1, deci suma nu este directa.
(c) Sa se determine un subspat, iu W al lui ℝ3 astfel ıncıt V1 ⊕ W ≃ ℝ3.
Raspuns: dimW = 1 s, i se alege astfel ıncıt W ∩ V1 = {(0, 0, 0)}.
2. Fie aplicat, ia liniara:
f ∶ ℝ2[X ] → ℝ3, f (a + bX + cX
2) = (a + c, 2b, c − b).
(a) Sa se determine matricea lui f ın baza canonica;
31
(b) Sa se determine Kerf s, i Imf , cu baza s, i dimensiune;Raspuns: dimKerf = 0 ⇒ dim Imf = 3.
(c) Decidet, i daca aplicat, ia f este injectiva sau surjectiva.Raspuns: Aplicat, ia este s, i injectiva, s, i surjectiva.
3. Fie aplicat, ia liniara:
f ∶ ℝ3→ ℝ
3, f (a, b, c) = (a, 2b, c − b).
Fie A matricea aplicat, iei ın baza canonica.
(a) Sa se aduca matricea A la forma diagonala.
(b) Sa se calculeze A21.
(*) Fie A ∈ M5(ℝ) astfel ıncıt:A
2− 3 ⋅ A + 2I5 = 05.
A�at, i vectorii s, i valorile proprii ale lui A.Raspuns: � (A) = {1, 2}.
4.2 Model 21. Fie spat, iile vectoriale:
V1 = {p ∈ ℝ2[X ] ∣ p(0) = 0}
V2 = Sp{1 + X, X + X2}.
(a) Sa se determine V1 s, i V2, cu baza s, i dimensiune.Raspuns: dimV1 = 2, dimV2 = 2.
(b) Sa se determine V1 + V2, cu baza s, i dimensiune.Raspuns: dimV1 + V2 = 3.
(c) Gasit, i W ≤ℝ ℝ2[X ] astfel ıncıt W ⊕ V1 ≃ ℝ2[X ].Raspuns: dimW = 1, deci W = Sp{f ∈ ℝ2[X ]}, astfel ıncıt W ∩ V1 = {0}.
32

2. Fie aplicat, ia liniara:
f ∶ ℝ2[X ] → M2(ℝ), f (a + bX + cX2) =
(
a 2b
c − a c − 2b).
(a) Determinat, i matricea aplicat, iei ın baza canonica.
(b) Determinat, i Kerf s, i Imf , cu baze s, i dimensiuni.Raspuns: Kerf = {0} ⇒ dim Imf = 3.
(c) Determinat, i un subspat, iu V ≤ℝ ℝ2[X ] astfel ıncıt V ⊕ Kerf ≃ ℝ2[X ].
(d) Decidet, i daca aplicat, ia f este injectiva sau surjectiva.Raspuns: Aplicat, ia este injectiva, dar nu este surjectiva.
3. Sa se diagonalizeze matricea:
A =
⎛
⎜
⎜
⎝
7 2 −2
2 4 −1
−2 −1 4
⎞
⎟
⎟
⎠
.
4.3 Model 3Acesta este part, ialul din 2017, Prof. A. Nit, a
Numarul 11. Fie aplicat, ia liniara f ∶ M2(ℝ) → ℝ2[X ] de�nita prin:
f(
a b
c d)= (a − b − c) + (8a − d)X
2.
(a) Determinat, i matricea aplicat, iei ın bazele canonice.
(b) Determinat, i Kerf s, i Imf , cu baze s, i dimensiuni.Raspuns: dimKerf = 2 ⇒ dim Imf = 2.
(c) Gasit, i un subspat, iu V ≤ℝ M2(ℝ) astfel ıncıt V ⊕ Kerf ≃ M2(ℝ).Raspuns: dimV = 2, deci V este generat de o matrice care nu se gases, te ın nucleu.
33

2. Fie f ∶ ℝ3→ ℝ
3 o aplicat, ie liniara, cu proprietatea ca f 2 − 3f = Idℝ3 , unde f 2 = f ◦f , iar Idℝ3
este aplicat, ia identitate.Veri�cat, i daca f este izomor�sm.Raspuns: Fie A = M
BC
f. Atunci MBC
f ◦f= A
2, deci relat, ia se rescrie:
A2− 3A = I3 ⇔ A(A − 3I3) = I3.
Cum A s, i A − 3I3 comuta, rezulta A−1= A − 3I3.
3. Fie matricea A =
⎛
⎜
⎜
⎝
1 2 0
0 2 0
−2 −2 −1
⎞
⎟
⎟
⎠
.
Sa se aduca matricea la forma canonica (diagonala).
4. Fie A ∈ M5(ℝ) o matrice nediagonala, cu proprietatea ca:
A2+ 3A + 2I5 = 05.
Calculat, i � (A).Raspuns: � (A) = {−1, −2}.
5. Fie spat, iile:
V1 = Sp{(2, 1, 3), (1, 1, 1)}
V2 = {(x, y, z) ∈ ℝ3∣ x − 3y + 2z = 0}.
Determinat, i V1, V2, V1 + V2, V1 ∩ V2, cu baze s, i dimensiuni.Raspuns: dimV1 = 2, dimV2 = 2, dim(V1 + V2) = 3, dimV1 ∩ V2 = 1.
(*) [Teorie] Aratat, i ca doua spat, ii vectoriale sınt izomorfe daca s, i numai daca au aceeas, i di-mensiune.
Numarul 21. Fie aplicat, ia liniara f ∶ ℝ2[X ] → M2(ℝ) de�nita prin:
f (a + bX + cX2) =
(
a − 8b a − c
0 c − b).
34

(a) Determinat, i Kerf , Imf cu baze s, i dimensiuni, precum s, i matricea aplicat, iei ın bazele canonice.
(b) Gasit, i un subspat, iu V ≤ℝ M2(ℝ) astfel ıncıt V ⊕ Imf ≃ M2(ℝ).
2. Fie f ∶ ℝ3→ ℝ
3 o aplicat, ie liniara, cu proprietatea ca f 2 − 4f = Idℝ3 , unde f 2 = f ◦f , iar Idℝ3
este aplicat, ia identica.Este f izomor�sm?
3. Sa se aduca la forma diagonala matricea:
A =
⎛
⎜
⎜
⎝
4 6 0
−3 −5 0
−3 −6 1
⎞
⎟
⎟
⎠
.
4. Fie A ∈ M5(ℝ) o matrice nediagonala, cu proprietatea:
A2+ 5A + 6I5 = 05.
Calculat, i � (A).
5. Fie spat, iile:
V1 = Sp{(1, 2, 1), (2, 1, 1)}
V2 = {(x, y, z) ∈ ℝ3∣ 3x − 2y + z = 0}.
Determinat, i V1, V2, V1 + V2, V1 ∩ V2, cu baze s, i dimensiuni.
(*) [Teorie] Enunt, at, i teorema de dimensiune a spat, iului factor (cıt).
35
36

SEMINAR 5
SPAT, II EUCLIDIENE. ORTONORMARE
Ne ındreptam spre aplicat, iile ın geometria clasica, adica euclidiana, ın care este esent, ial sa putemcalcula lungimi (distant, e) s, i unghiuri.
In liceu, puteam face aceasta folosind produsul scalar al doi vectori descompus, i ın reperulcartezian. Astfel, �e vectorii:
v = ai + bj, w = ci + dj, a, b, c, d ∈ ℝ.
Avem:
• produsul scalar: v ⋅ w = ac + bd ∈ ℝ;
• lungimea vectorului v =
√
v ⋅ v;
• cosinusul unghiului ıntre doi vectori: cos(v, w) =v ⋅ w
vw
;
• vectorii sınt perpendiculari daca v ⋅ w = 0.
Acestea sınt not, iunile pe care le extindem acum ın cazul spat, iilor vectoriale arbitrare. Vomprezenta pentru cazul spat, iului real V = ℝ
n, celelalte rezolvındu-se similar, prin intermediulizomor�smelor canonice.
Fie, deci, v = (v1,… , vn), w = (w1,… , wn) doi vectori din ℝn. Se de�nesc:
• produsul scalar:
⟨v, w⟩ =
n
∑
i=1
viwi ∈ ℝ;
• norma vectorului:||v|| =
√
⟨v, v⟩ ∈ ℝ;
37

• cosinusul unghiului ıntre doi vectori:
cos(v, w) =
⟨v, w
||v|| ⋅ ||w ||
∈ [−1, 1].
Avem s, i cazul particular de interes:
De�nitie 5.1: Doi vectori v s, i w din ℝn se numesc perpendiculari (ortogonali), notat v ⟂ w , daca
⟨v, w⟩ = 0.
Cu acestea, avem:
De�nitie 5.2: Spat, iul vectorialℝn se numes, te euclidian, deoarece este ınzestrat cu produsul scalarde mai sus.
Aplicat, iile care ne vor interesa sınt: calculul complementului ortogonal al unui subspat, iu s, iortonormarea unei baze.
Incepem cu primul subiect.
De�nitie 5.3: Fie V un subspat, iu al unui spat, iu euclidian (ℝn, ın majoritatea aplicat, iilor). Sede�nes, te:
V⟂= {x ∈ ℝ
n∣ x ⟂ v, ∀v ∈ V }
subspat, iu care se numes, te complementul ortogonal al lui V .
O proprietate esent, iala, care ne va permite sa gasim complementul ortogonal, este urmatoarea:
Teorema 5.1: Fie V un subspat, iu al lui ℝn. Daca V ⟂ este complementul sau ortogonal, atunci:
V ⊕ V⟂≃ ℝ
n.
Rezulta, folosind teorema lui Grassmann s, i de�nit, ia sumei directe, ca:
• dimV⟂= dimℝ
n− dimV ;
• V ⟂∩ V = {0}.
De asemenea, amintim ca ın ℝ2, de exemplu, baza canonica formata din {(1, 0), (0, 1)}, pe care
o putem ınt, elege s, i {i, j}, are o proprietate speciala. Mai precis, vectorii i s, i j sınt versori, adicai ⟂ j s, i i = j = 1.
In orice spat, iu euclidian, putem obt, ine o baza similara, numita baza ortonormata, ın douaetape, folosind procedeul Gram-Schmidt.
Fie, as, adar, B = {b1,… , bn} o baza arbitrara ın ℝn. Vrem sa obt, inem din ea o baza ortonormata
C = {c1,… , cn}, adica sa �e formata din versori:
• ci ⟂ cj , ∀i ≠ j;
38

• ||ci || = 1, ∀i.
Procedeul construies, te pas cu pas ci , pornind de la bi .
(1) Alegem c1 = b1;
(2) De�nim c2 = b2 + �c1, cu � un scalar pe care vrem sa-l determinam. Punem condit, ia c2 ⟂ c1
s, i rezulta:0 = ⟨c2, c1⟩ = ⟨b2 + �c1, c1⟩ = ⟨b2, c1⟩ + �⟨c1, c1⟩.
As, adar:� = −
⟨b2, c1⟩
⟨c1, c1⟩
.
(3) Continuam mai departe sa de�nim c3 = b3 +�c2 + �c1 s, i determinam �, � din condit, iile c3 ⟂ c2
s, i c3 ⟂ c1.
(4) Procedeul continua dupa regula generala:
ci = bi +
1
∑
j=i−1
�jcj ,
iar condit, iile pe care le vom putea folosi la �ecare pas, pentru determinarea constantelor �jsınt ci ⟂ cj , ∀j < i, deoarece cj au fost determinate la pas, ii anteriori.
Rezulta, cu aceasta, o baza ortogonala C = {c1,… , cn}. Aceasta baza se normeaza, obt, inındvectori de norma 1 foarte simplu. De�nim:
c′
i=
1
||ci ||
⋅ ci
s, i observam ca acum avem ||c′
i|| = 1.
As, adar, baza C′= {c
′
1,… , c
′
n} este o baza ortonormata, adica formata doar din versori, iar
procedeul se ıncheie.
5.1 Exercit, ii1. Sa se ortonormeze bazele:
(a) B1 = {(1, 0, 1), (−1, 2, 0), (0, 1, −1)} a lui ℝ3;
(b) B2 = {X + 1, X2+ 1, 3} a lui ℝ2[X ];
(c) B3 = {(1, −1, 0, 0), (0, 1, 1, −1), (1, 0, −1, 1), (2, 1, 0, 1)} a lui ℝ4.
39
2. Sa se completeze mult, imea {(1, −1, 2), (1, 2, 3)} pına la o baza a lui ℝ3 s, i sa se ortonormezebaza rezultata.
3. Sa se completeze mult, imea {3, 2X + 1} pına la o baza a lui ℝ2[X ] s, i sa se ortonormeze bazarezultata.
4. Gasit, i complementele ortogonale pentru:
(a) V1 = Sp{(−1, 1, 2), (0, 1, 1)} ın ℝ3;
(b) V2 = Sp{(1, 1, 1)} ın ℝ3;
(c) V3 = {(x, y, z) ∈ ℝ3∣ 3x + y = 0} ın ℝ
3;
(d) V4 = {(x, y, z) ∈ ℝ3∣ x = y} ın ℝ
3;
(e) V5 = {p ∈ ℝ2[X ] ∣ p′(0) = 0} ın ℝ2[X ];
(f) V6 = {p ∈ ℝ2[X ] ∣ p(0) = 0} ın ℝ2[X ];
(g) V7 = Sp{X} ın ℝ2[X ];
(h) V8 = Sp{2, 5X2} ın ℝ2[X ];
(i) V9 = {(x, y, z, t) ∈ ℝ4∣ 3x + y = 0, y + z − t = 0} ın ℝ
4.
40
SEMINAR 6
FORMA CANONICA JORDAN. CONICE S, ICUADRICE
6.1 Forma canonica JordanDupa cum am vazut, nu orice matrice poate � adusa la forma diagonala. Insa vom vedea ca, pentruspat, ii vectoriale reale, orice matrice poate � adusa la forma canonica Jordan, care este ”aproapediagonala“, ıntr-un anume sens.
Prezentarea de mai jos urmeaza materialul [Brınzanescu and Stanasila, 1998], pp. 90–108.Algoritmul va proceda similar cu cazul diagonalizarii, ın prima parte.Fie A ∈ Mn(ℝ) o matrice careia vrem sa-i gasim forma canonica Jordan.
• Se calculeaza polinomul caracteristic al matricei, PA(X ), de unde se obt, in valorile proprii,� (A) = {�1,… , �p};
• Pentru �ecare valoare proprie, se determina vectorii proprii s, i subspat, iile invariante cores-punzatoare;
• Pentru �ecare valoare proprie �i , de�nim matriceaM = A−�iIn. Observam caKerM = V (�i).Pentru aceasta matrice, se calculeaza s, irul ascendent de nuclee:
V (�i) = KerM ⊂ KerM2⊂ ⋯ ⊂ KerM
s,
ultimul spat, iu notındu-se �e K (M), �e V �i s, i numindu-se nucleu stabil al lui M .Prin de�nit, ie, dimV
�i= ma(�i).
• Alegem vectori liniar independent, i astfel:
41

– u1,… , up1∈ KerM
s− KerM
s−1, astfel ıncıt KerM s−1⊕ Sp{ui} ≃ KerM
s . Altfel spus,completam baza lui KerM s−1 la o baza a lui KerM s ;
– Calculam Mut
j∈ KerM
s−1− KerM
s−2 s, i completam rezultatele la o baza a lui KerM s−1.– Continuam aces, ti pas, i s, i ın �nal se obt, ine o lista de forma:
⎧⎪⎪⎪⎪⎪
⎨⎪⎪⎪⎪⎪⎩
u1,… , up1
Mu1,… , Mup1 , up1+1,… , up2
…
Ms−1u1,… , M
s−1up1,… , ups
ultima linie reprezentınd o baza pentru V (�i), pe care o notam cu B1.
• Refacem pas, ii anteriori pentru �ecare valoare proprie s, i va rezulta B = B1 ∪… cupBp o bazaa lui ℝn;
• Fie T matricea de trecere de la baza canonica la aceasta baza. Atunci forma canonica Jordanse scrie J = T −1
AT .
Observatie 6.1: Daca, ın loc de matrice, se pornes, te cu un endomor�sm f , se considera mai ıntıimatricea asociata ın baza canonica, A, apoi putem continua ca mai sus.
De asemenea, ın locul matricei M , putem gındi ca de�nim un nou endomor�sm g = f − �Idℝn .
6.1.1 Exemple rezolvatePrezentam ın continuare cıteva exercit, ii rezolvate, ın care insistam pe elementele de noutate. Amomis calculele intermediare, pe care le putet, i veri�ca us, or.
1. Fie matricea:
A =
⎛
⎜
⎜
⎝
1 −1 −1
−3 −4 −3
4 7 6
⎞
⎟
⎟
⎠
.
Calculam forma canonica Jordan a acestei matrice.Polinomul caracteristic este:
PA(X ) = det(A − XI3) = −(X + 1)(X − 2)2,
deci avem doua valori proprii �1 = −1, ma(−1) = 1 s, i �2 = 2, ma(2) = 2.Fie �1 = −1. De�nim M = A − �1I3. Atunci KerM = V (�1) = Sp{(0, 1, −1)}. Deoarece
dimV (�1) = 1 = mg(�1) = ma(�1), rezulta ca s, irul nucleelor are un singur termen, deci listava cont, ine doar u1 = (0, 1, −1).
Fie acum �2 = 2. De�nim M = A − �2I3.
42

Calculam KerM = V (�2) = Sp{(1, 0, −1)}. Cumma(�2) = 2, rezulta ca s, irul nucleelor va cont, ineun pas s, i va � de forma V (�2) ⊂ V �2 . Intr-adevar, calculam:
V�2= KerM
2= {(x1, x2, x3) ∈ ℝ
3∣ x1 + 2x2 + x3 = 0}.
Alegem u2 ∈ V�2− V (�2) astfel ıncıt V (�2) ⊕ Sp{u2} = V
�2 . Altfel spus, completam baza luiV (�2) la o baza a lui V �2 .
De exemplu, putem lua u2 = (−2, 1, 0). Mai departe, calculam Mut
2= (1, 0, −1).
Din lista {u1, u2, Mut
2} obt, inem o baza a lui ℝ3, iar matricea de trecere de la baza canonica va
�:
T =
⎛
⎜
⎜
⎝
0 −2 1
1 1 0
−1 0 −1
⎞
⎟
⎟
⎠
Iar forma canonica Jordan este:
J = T−1AT =
⎛
⎜
⎜
⎝
−1 0 0
0 2 0
0 1 2
⎞
⎟
⎟
⎠
Spunem ca aceasta matrice este alcatuita din 2 blocuri Jordan, unul de marime 2, asociat valo-rii proprii 2, iar unul de marime 1, asociat valorii proprii -1. Observat, i forma ”aproape diagonala“a matricei: ıntr-adevar, blocul Jordan asociat valorii proprii 2 cont, ine un element nenul sub dia-gonala.
2. Fie matricea:
A =
⎛
⎜
⎜
⎜
⎝
1 1 1 0
−1 3 0 1
−1 0 −1 1
0 −1 −1 1
⎞
⎟
⎟
⎟
⎠
.
Aducem aceasta matrice la forma canonica Jordan.Calculınd polinomul caracteristic, gasim:
PA(X ) = (X − 1)4⇒ � (A) = {1}, ma(1) = 4.
Rezulta ca V �≃ ℝ
4.Calculam spat, iul vectorilor proprii s, i obt, inem:
V (�) = {(�, �, −�, � − 2�) ∈ ℝ4}.
De�nim M = A − �I4 s, i avem KerM = V (�).Cum mg(�) = 2, rezulta ca s, irul nucleelor va avea 3 termeni:
V (�) = KerM ⊂ KerM2⊂ V
�≃ ℝ
4.
43

Calculınd M2 s, i apoi KerM2, obt, inem:
KerM2= {(x1, x2, x3, x4) ∈ ℝ
4∣ x1 − x2 + x3 − x4 = 0},
deci un spat, iu de dimensiune 3.Alegem u1 ∈ V
�− KerM
2 astfel ıncıt KerM2⊕ Sp{u1} = V
�. Fie, de exemplu, u1 = (1, 0, 0, 0).Calculam Mu
t
1= (0, −1, −1, 0) s, i M2
ut
1= (−2, −2, 2, 2).
Acum alegem u2 ∈ V (�) astfel ıncıt {M2ut
1, u2} sa �e o baza a lui V (�). Fie, de exemplu,
u2 = (1, 0, 0, 1).Lista cont, ine: u1, Mu
t
1, M
2u1, u2, vectori independent, i, su�cient, i pentru o baza a lui ℝ4. Scriem
matricea de trecere de la baza canonica:
T =
⎛
⎜
⎜
⎜
⎝
1 0 −2 1
0 −1 −2 0
0 −1 2 0
0 0 2 1
⎞
⎟
⎟
⎟
⎠
,
iar forma Jordan se obt, ine a �:
J = T−1AT =
⎛
⎜
⎜
⎜
⎝
1 0 0 0
1 1 0 0
0 1 1 0
0 0 0 1
⎞
⎟
⎟
⎟
⎠
.
Observam ca aceasta matrice este alcatuita dintr-un bloc de marime 3 s, i unul de marime 1,ambele corespunzatoare valorii proprii � = 1.
6.1.2 Exercit, ii propuse
Aducet, i la forma canonica Jordan endomor�smul:
f ∶ ℝ3→ ℝ
3, f (x, y, z) = (3x + y − z, 2y, x + y + z)
s, i matricele:
A =
⎛
⎜
⎜
⎝
4 −1 1
1 3 −1
0 1 1
⎞
⎟
⎟
⎠
, B =
⎛
⎜
⎜
⎜
⎝
1 1 1 0
−1 3 0 1
−1 0 −1 1
0 −1 −1 1
⎞
⎟
⎟
⎟
⎠
, C =
⎛
⎜
⎜
⎝
0 −1 0
−1 −2 2
0 −1 0
⎞
⎟
⎟
⎠
.
44

Figura 6.1: Conice s, i ecuat, iile lor
6.2 ConiceConicele sınt curbe plane, date de ecuat, ii patratice. Ele sınt reprezentate ın �gura 6.1, ımpreunacu ecuat, iile canonice.
Scopul pe care ni-l propunem ın aceasta sect, iune este sa aducem o ecuat, ie a unei conice laforma canonica s, i sa o reprezentam gra�c.
Vom prezenta algoritmul direct pe un exemplu. Metoda aplicata se numes, te metoda rototranslat, iei,deoarece va folosi o operat, ie de rotat, ie s, i una de translat, ie a conicei.
Fie, de exemplu, conica:
g(x, y) = 3x2− 4xy − 2x + 4y − 3 = 0.
Mai ıntıi, se scrie forma patratica asociata, adica alegem din conica termenii de grad total 2:
q(x, y) = 3x2− 4xy.
Apoi, scriem matricea asociata lui q, care este:
A =(
3 −2
−2 0 )
45

Aceasta matrice se obt, ine punınd coe�cient, ii termenilor patratici, ın ordine lexicogra�ca.Daca C(t) noteaza coe�cientul termenului t , atunci matricea este, ın forma generica:
A =(
C(x2) C(xy)
C(yx) C(y2))
,
cu convent, ia ca C(xy) = C(yx), deci ın matrice vom avea jumatate din coe�cientul din formapatratica.
Pentru aceasta matrice, scriem ecuat, ia caracteristica:
PA(X ) = det(A − XI2) = X2− 3X − 4 = (X + 1)(X − 4).
Rezulta ca valorile proprii sınt � (A) = {−1, 4}.In acest punct, putem face o observat, ie de anticipat, ie. Se numes, te invariantul � al conicei
produsul valorilor proprii. Avem cazurile:
• � = �1 ⋅ �2 > 0 ⇒ conica este elipsa;
• � = �1 ⋅ �2 < 0 ⇒ conica este hiperbola;
• � = �1 ⋅ �2 = 0 ⇒ conica este parabola.
In cazul nostru, vom obt, ine o hiperbola.Mai departe, se calculeaza vectorii proprii s, i obt, inem:
V (�1) = Sp{(1, 2)}, V (�2) = Sp{(2, −1)}.
Vectorii din bazele subspat, iilor proprii trebuie ortonormat, i (de exemplu, folosind proceduraGram-Schmidt). Observam ca ei sınt deja ortogonali, deci mai trebuie doar sa-i normam:
||(1, 2)|| = ||(2, −1)|| =
√
5,
deci obt, inem versorii proprii:
e1 = (
1
√
5
,
2
√
5), e2 = (
2
√
5
,
−1
√
5)
Aces, ti versori vor alcatui coloanele matricei de rotat, ie:
R =(
1√
5
2√
5
2√
5
−1√
5)
In general, o matrice de rotat, ie de unghi � (ın sens trigonometric) are forma:
R� =(
cos � − sin �
sin � cos � )
46

s, i det R� = 1.In cazul nostru, det R = −1, deci putem schimba ıntre ele coloanele s, i obt, inem o matrice de
rotat, ie (echivalent, putem schimba orientarea unuia dintre versori, de exemplu, e1 ⟶ −e1).Apoi aplicam rotat, ia, adica, daca (x, y) sınt vechile coordonate, coordonatele din sistemul rotit
(x′, y
′) se obt, in din ecuat, ia:
(
x
y)= R ⋅
(
x1
y1)
Cu alte cuvinte, avem sistemul:{
x =−1√
5x+
2√
5y1
y =−2√
5x1 +
−1√
5y1
.
Aceste coordonate se ınlocuiesc ın ecuat, ia init, iala a conicei s, i obt, inem conica rotita:
−x2
1+ 4y
2
1−
6
√
5
x1 −
8
√
5
y1 − 3 = 0.
Prelucram algebric, completınd patratele, s, i obt, inem:
−(x1 +
3
√
5)
2
+ 4(y1 −
1
√
5)
2
= 2.
Facem acum translat, ia:{
X = x1 +3√
5
Y = y1 −1√
5
s, i obt, inem:−X
2+ 4Y
2= 2 ⇔ −
(
X
√
2)
2
+(
Y
1/2)
2
= 1,
deci ecuat, ia unei hiperbole.Pentru reprezentarea gra�ca, trebuie sa t, inem cont de operat, iile efectuate:
• rotat, ia de unghi � , cu proprietatea ca cos � = −
1
√
5
, deci � ≃
2�
3
;
• translat, ia centrului cu 3
√
5
pe axa OX s, i −1
√
5
pe axa OY .
Mai putem determina s, i centrul conicei, din sistemul:⎧⎪⎪⎪⎪⎪
⎨⎪⎪⎪⎪⎪⎩
)g
)x
= 0
)g
)y
= 0
Solut, ia sistemului este centrul conicei, de coordonate C(1, 1).Reprezentarea gra�ca (folosind GeoGebra) este redata ın �gura 6.2.
47

Figura 6.2: Hiperbola 3x2− 4xy − 2x + 4y − 3 = 0
6.3 Cuadrice
Cuadricele sınt suprafet, e care pot � obt, inute prin rotirea unei conice ın jurul unei axe. Astfel, dinelipsa, de exemplu, obt, inem elipsoizi, din parabola, paraboloizi, iar din hiperbola, hiperboloizi.
Formele, ımpreuna cu ecuat, iile canonice, pot � consultate, de exemplu, aici.Procedura de a aduce o cuadrica la forma canonica funct, ioneaza ca ın cazul conicelor.Mai jos un exemplu rezolvat.
x2+ 3y
2+ 4yz − 6x + 8y + 8 = 0.
Consideram forma patratica asociata:
g = x2+ 3y
2+ 4yz,
care are matricea simetrica.
A =
⎛
⎜
⎜
⎝
1 0 0
0 3 2
0 2 0
⎞
⎟
⎟
⎠
Ecuat, ia caracteristica rezulta: (1 − �)(�2 − 3� − 4) = 0, deci �1 = 1, �2 = −1, �3 = 4.
48

Gasim subspat, iile invariante:
V (�1) =
{
(x, y, z) ∈ ℝ3∣
⎛
⎜
⎜
⎝
0 0 0
0 2 2
0 2 −1
⎞
⎟
⎟
⎠
⋅
⎛
⎜
⎜
⎝
x
y
z
⎞
⎟
⎟
⎠
=
⎛
⎜
⎜
⎝
0
0
0
⎞
⎟
⎟
⎠
}
= {(x, 0, 0) ∣ x ∈ ℝ}
Similar:
V (�2) = {(0, y, −2y) ∣ y ∈ ℝ}
V (�3) = {(0, 2z, z) ∣ z ∈ ℝ}.
Alegem vectori proprii ortonormat, i particularizınd elemente din subspat, iile invariante. Deexemplu:
e1 = (1, 0, 0), e2 =
1
√
5
(0, 1, −2), e3 =
1
√
5
(0, 2, 1).
Matricea R cu aces, ti vectori pe coloane are proprietatea det R = 1, deci este o matrice de rotat, ie.O aplicam s, i gasim schimbarea de coordonate:
⎧⎪⎪⎪
⎨⎪⎪⎪⎩
x = x′
y =1√
5(y
′+ 2z
′)
z =1√
5(−2y
′+ z
′)
Ecuat, ia cuadricei devine:
x′2− y
′2+ 4z
′2− 6x
′+
8
√
5
y′+
16
√
5
z′+ 8 = 0.
Formam patrate s, i obt, inem:
(x′− 3)
2− (y
′−
4
√
5)
2
+ 4(z′+
2
√
5)
2
− 1 = 0.
Efectuam translat, ia corespunzatoare noilor coordonate s, i obt, inem:
X2− Y
2+ 4Z
2− 1 = 0 ⇔ X
2− Y
2+
Z2
1
4
− 1 = 0,
adica un hiperboloid cu o pınza.
49
6.4 Exercit, ii propuse1. Aducet, i urmatoarele conice la forma canonica s, i reprezentat, i-le:
(a) 4xy − 3y2+ 4x − 14y − 7 = 0 (hiperbola);
(b) 9x2− 6xy + y
2+ 20x = 0 (parabola);
(c) x2 − 2xy + 3y2− 4x + 6y − 4 = 0 (elipsa);
(d) 5x2+ 8xy + 5y
2− 18x − 18y + 9 = 0 (elipsa);
(e) x2 − 4xy + 4y2− 6x + 2y + 1 = 0 (parabola)
2. Aceeas, i cerint, a pentru cuadrica:
x2− y
2+ z
2− 2xy − 2yz − 2zx − 5x − 1 = 0
(hiperboloid cu o pınza).
50
SEMINAR 7
ECUAT, II S, I SISTEME DIFERENT, IALE
Daca nu se precizeaza altfel, vom presupune ca lucram cu funct, ii de forma y = y(x), deci y′ vaınsemna dy
dx.
7.1 Ecuat, ii cu variabile separabile/separateAcesta este cel mai simplu exemplu de ecuat, ii diferent, iale s, i se rezolva direct prin integrare, dupao reordonare corespunzatoare.
Exemplu 1: (1 + x2)yy′+ x(1 + y
2) = 0, s, tiind ca y(1) = 2.
Solut, ie: Separam variabilele s, i diferent, ialele s, i obt, inem succesiv:
(1 + x2)y ⋅
dy
dx
+ x(1 + y2) = 0 ⇔
(1 + x2)ydy = −x(1 + y
2)dx ⇔
y
1 + y2dy = −
x
1 + x2dx ⇔
1
2
ln(y2+ 1) = −
1
2
ln(x2+ 1) + c.
Pentru uniformitate, putem pune 1
2ln c ın locul constantei.
Rezulta 1 + y2=
c
1+x2, cu c > 0, pentru existent, a logaritmului.
Inlocuim ın condit, ia init, iala y(1) = 2 s, i obt, inem c = 10. In �ne:
y(x) =
√
9 − x2
1 + x2, x ∈ (−3, 3),
punınd s, i condit, iile de existent, a.
51

In unele cazuri, este util sa facem schimbari de variabila. De exemplu:Exemplu 2: y′
= sin2(x − y).
Solut, ie: Notam x − y = z s, i avem ca y′= 1 − z
′, de unde, ın ecuat, ie, obt, inem succesiv:
z′= 1 − sin
2z = cos
2z ⇒
dz
dx
= cos2z ⇒
dz
cos2z
= dx ⇒
tan z = x + c ⇒
tan(x − y) = x + c,
care poate � prelucrata pentru a obt, ine y(x) sau lasata ın forma implicita.
7.2 Ecuat, ii liniareForma generala a acestor ecuat, ii este:
y′= P (x) ⋅ y + Q(x).
Distingem doua cazuri:
• Daca Q = 0, atunci ecuat, ia se numes, te omogena;
• Daca Q ≠ 0, ecuat, ia este neomogena.
Metoda generala de rezolvare este sa folosim formula:
y(x) = c ⋅ exp(−∫
x
x0
P (t)dt),
pentru a obt, ine o solut, ie particulara pentru ecuat, ia omogena. Apoi, din teorie, s, tim ca putemfolosi metoda variat, iei constantelor (Lagrange) pentru a obt, ine solut, ia ecuat, iei neomogene. Pentruaceasta, ın locul constantei c vom considera o funct, ie c(x) s, i ınlocuim ın ecuat, ia init, iala.
Pe scurt, pentru ecuat, ia liniara:
y′+ P (x)y = Q(x),
avem:
• Solut, ia particulara pentru varianta omogena yp = c ⋅ exp( − ∫ P (x)dx)
;
52

• Solut, ia generala (din Lagrange):
yg = exp(−∫
P (x)dx)⋅(C +
∫Q(x) ⋅ exp
(∫P (x)dx
)dx
)
Solut, ia generala a problemei este suma ıntre solut, ia particulara s, i cea generala.Exemplu 1: y′
+ y sin x = − sin x cos x .Solut, ie: Putem ınlocui direct ın formula s, i obt, inem y = C ⋅ e
cos x− cos x − 1.
Exemplu 2: y′+ xy = xe
−x2
2 .Solut, ie: Asociem ecuat, ia omogena y′
+ xy = 0, pe care o rescriem:
dy
dx
+ xy = 0 ⇒
dy
y
= −xdx ⇒ yp = ce−x2
2 .
Acum, folosind metoda lui Lagrange, cautam o solut, ie de forma y(x) = c(x)e− x2
2 .Inlocuim ın ecuat, ia init, iala s, i gasim y
′+xy = c
′(x)e
−x2
2 , dar, comparınd cu ecuat, ia data, gasimc′(x) = x , de unde c(x) = x
2
2.
As, adar, avem yg =x2
2e−x2
2 , iar solut, ia �nala este suma celor doua:
y =(
x2
2
+ c)e−x2
2 .
Exemplu 3: 2xyy′+ 2y
2− x
4= 0.
Solut, ie: Putem face o substitut, ie y2= z, cu care ecuat, ia devine z′ + 2
xz = x
3. Avem, ın acestcaz, P (x) = 2
x, iar Q(x) = x
3. Cum ∫ P (x)dx = 2 ln x , iar ∫ Q(x)e∫ P (x)dx
dx =x6
6, obt, inem solut, ia
generala:
y(x) =
1
x
√
c +
x6
6
, x > 0.
7.3 Ecuat, ia BernoulliForma generala a ecuat, iei Bernoulli este:
y′+ P (x)y = Q(x)y
�.
Remarcam ca:
• Daca � = 0, obt, inem o ecuat, ie omogena;
53

• Daca � ≠ 0, obt, inem o ecuat, ie neomogena, ca ın sect, iunea anterioara.
Pas, ii de rezolvare sınt:
• Se ımparte cu y� s, i obt, inem:
y−�y′+ P (x)y
1−�= Q(x);
• Facem substitut, ia y1−�= z s, i ajungem la ecuat, ia:
(1 − �)y1−�
⋅ y′= z
′,
de unde z′
1−�+ P (x)z = Q(x), care este o ecuat, ie neomogena, rezolvabila ca ın sect, iunea
anterioara.
Exemplu 1: y′−
y
3x=
1
3y4ln x, x > 0.
Solut, ie: Avem � = 4, deci ımpart, im la y4 s, i obt, inem:
y−4y′−
1
3x
y−3=
1
3
ln x.
Cu substitut, ia z = y−3, ajungem la:
z′= −3y
4y′⇒ z
′+
1
x
z = − ln x.
Avem P (x) =1
xs, i Q(x) = − ln x , deci putem aplica formula pentru solut, ia generala a ecuat, iei
neomogene:z = e
− ln x
(c −
∫ln xe
ln xdx
)=
1
x(c −
∫x ln x
).
In �ne:y−3=
c
x
+
x
4
−
x
2
ln x, x > 0.
Exemplu 2: y′+
2
3xy =
1
3y2.
Solut, ie: Avem � = 2, deci ımpart, im la y2 s, i ajungem la:
y′
y2+
2
3x
⋅
1
y
=
1
3
.
Cu substitut, ia z = 1
y, avem z
′+
2
3xz =
1
3, care este liniara s, i neomogena.
Lucram cu ecuat, ia omogena z′ + 2
3x= 0, de unde z
′
z=
2
3x, care este cu variabile separabile s, i
gasim z = cx
2
3 , pentru ecuat, ia omogena.Aplicam acum metoda variat, iei constantelor s, i luam z = c(x)x
2
3 . Dupa ınlocuire ın ecuat, iainit, iala, avem c(x) = −x
1
3 .Solut, ia �nala este acum suma z = −x + cx
2
3 =1
y.
54

7.4 Ecuat, ia RiccatiForma generala este:
y′= P (x)y
2+ Q(x)y + R(x).
Observam ca:
• Daca Q = 0, avem o ecuat, ie liniara s, i neomogena;
• Daca R = 0, este o ecuat, ie Bernoulli, cu � = 2.
In general, ecuat, ia Riccati se rezolva s, tiind o solut, ie particulara yp . Apoi, folosind formulay = yp + z s, i ınlocuind, se ajunge la o ecuat, ie Bernoulli:
z′+ (p(x) + 2q(x)yp)z + q(x)z
2= 0.
Pentru a gasi solut, ii particulare, urmatoarea teorema ne ajuta ıntr-un anumit caz:
Teorema 7.1: Daca avem ecuat, ia Riccati de forma:
y′= Ay
2+
B
x
y +
C
x2,
unde (B + 1)2− 4AC ≥ 0, atunci o solut, ie particulara este yp = c
x.
Exemplu 1: y′= −
1
3y2−
2
3x2, x > 0.
Solut, ie: Aplicınd teorema, putem lua yp =1
xca solut, ie particulara. Apoi cautam o solut, ie
generala de forma y =1
x+ z, dar, pentru convenient, a, putem lua z → 1
z. Inlocuim ın ecuat, ie s, i
obt, inem succesiv:
−
1
x2−
z′
z2= −
1
3(
1
x2+
2
xz
+
1
z2)
−
2
3x
⇒
z′−
2
3x
z =
1
3
⇒
z = Cx
2
3 + x,
de unde y =1
x+
1
Cx
2
3 +x
, cu x > 0.
7.5 Ecuat, ia ClairautForma generala a ecuat, iei este:
y = xy′+ '(y
′).
Pentru rezolvare, se noteaza y′= p s, i, ınlocuind, avem:
y = xp + '(p).
55

Derivam dupa x s, i gasim:
p = p + x ⋅
dp
dx
+ '′(p) ⋅
dp
dx
,
de unde (x + '′(p))
dp
dx= 0.
Mai departe:
• Daca dp
dx= 0, atunci p = C s, i avem y = C ⋅ x + '(c), ca solut, ie generala;
• Daca x + '′(p) = 0, obt, inem solut, ia singulara, care se prezinta parametric, adica ın funct, ie
de p, astfel:{
x = −'′(p)
y = −p'′(p) + '(p)
Exemplu: y = xy′− y
′2.Solut, ie: Notam y
′= p, deci y = xp − p
2.Obt, inem, ınlocuind ın ecuat, ie:
pdx + xdp − 2pdp = pdx ⇒ (x − 2p)dp = 0.
Distingem cazurile:
• Daca dp = 0, atunci p = C s, i y = Cx − C2, o solut, ie particulara;
• Solut, ia singulara se reprezinta parametric, corespunzator cazului x − 2p = 0, prin:{
x = 2p
y = p2
Revenind la y, gasim y =x2
4.
Observatie 7.1: Geometric, solut, ia generala este ınfas, uratoarea solut, iei particulare, adica o curbacare aproximeaza, din aproape ın aproape, dreapta solut, iei particulare.
7.6 Ecuat, ii exacte. Factor integrantForma generala este:
P (x, y) + Q(x, y)y′= 0.
56

Daca are loc )P
)y=
)Q
)x, atunci ecuat, ia se numes, te exacta, iar solut, ia ei generala se prezinta prin:
F (x, y) =∫
x
x0
P (t, y0)dt + ∫
y
y0
Q(x, t)dt,
pentru orice (x, y) din domeniul de de�nit, ie, iar (x0, y0) un punct arbitrar �xat, ın jurul caruiadeterminam solut, ia.
Observatie 7.2: Pentru simplitate, vom mai folosi notat, iile Py =)P
)ys, i similar pentru Qx . Deci
condit, ia de exactitate se mai scrie, pe scurt, Py = Qx .
Exemplu: (3x2 − y) + (3y2− x)y
′= 0.
Solut, ie: Remarcam ca avem P (x, y) = 3x2− x s, i Q(x, y) = 3y
2− x , deci Py = Qx = −1, ecuat, ia
�ind exacta. Obt, inem direct, din formula pentru solut, ia generala:
F (x, y) = x3+ y
3− xy + x0y0 − x
3
0− y
3
0.
Cum (x0, y0) sınt �xate, putem prezenta solut, ia ın forma implicita y = ', unde ' = x3+y
3−xy =
c, constanta �ind expresia de (x0, y0) de mai sus.
Daca ecuat, ia nu este exacta, se cauta un factor integrant, adica o funct, ie �(x, y) cu care seınmult, es, te ecuat, ia pentru a deveni exacta.
Exista doua cazuri particulare ın care factorul integrant se gases, te simplu:
• Daca expresia Py−Qx
Qdepinde doar de x , se poate lua � = �(x);
• Daca expresia Qx−Py
Pdepinde doar de y, se poate lua � = �(y).
In celelalte cazuri, factorul integrant, de obicei, se da ın enunt, ul problemei, deoarece estedi�cil de gasit, dar o teorema de existent, a ne arata ca el poate � mereu gasit.
Observatie 7.3: Pentru a ret, ine mai us, or condit, iile simple de cautare a factorului integrant, por-nim cu ecuat, ia ın forma generala, ınmult, im cu �, ceea ce ne schimba s, i P s, iQ, apoi scriem condit, iade exactitate. Pentru primul caz, de exemplu, obt, inem:
�x
�
=
Py − Qx
Q
,
deci daca membrul drept depinde doar de x , putem lua � = �(x) s, i similar ın al doilea caz.
57

Odata gasit factorul integrant, sa presupunem � = �(x), integram condit, ia de exactitate s, igasim:
ln �(x) =∫
'(x) + c,
unde '(x) = Py−Qx
Qs, i deci �(x) = exp
(∫ '(x)dx
).
Exemplu: (1 − x2y) + x2(y − x)y′= 0.
Solut, ie: Observam ca ecuat, ia nu este exacta, dar veri�cınd condit, iile pentru factorul integrant,putem lua �(x) = 1
x2. Inmult, im ecuat, ia cu � s, i gasim:
(
1
x2− y
)+ (y − x)y
′= 0,
care este exacta. Atunci putem scrie direct solut, ia generala:
F (x, y) =
y2
2
−
1
x
− xy + C,
solut, ia implicita �ind y2
2−
1
x− xy = const..
Exercit, iu: Rezolvat, i ecuat, ia y2(2x −3y) + (7 − 3xy
2)y
′= 0, cautınd (dupa veri�care) un factor
integrant �(y).
7.7 Ecuat, ia LagrangeForma generala a ecuat, iei Lagrange este:
A(y′) ⋅ y + B(y
′) ⋅ x + C(y
′) = 0.
Daca avem A(y′) ≠ 0, putem ımpart, i s, i obt, inem:
y = f (y′) + g(y
′), f (y
′) =
−B(y′)
A(y′)
, g(y′) = −
C(y′)
A(y′)
.
Daca f (y′) = y
′, obt, inem o ecuat, ie de tip Clairaut.Altfel, �e y′
= p, deci dy = pdx . Inlocuim ın ecuat, ia init, iala s, i gasim:
y = xf (p) + g(p) ⇒ dy = f (p)dx + xf′(p)dp + g
′(p)dp.
Egalam cele doua expresii pentru dy s, i ajungem la:
pdx = f (p)dx + xf′(p)dp + g
′(p)dp.
58

In �ne:(f (p) − p)dx + (xf
′(p) + g
′(p))dp = 0.
In acest caz, daca f (p) este o constanta, obt, inem o ecuat, ie cu variabile separabile.Altfel, putem ımpart, i la (f (p) − p)dp s, i ajungem la:
dx
dp
+
f′(p)
f (p) − p
x +
g′(p)
f (p) − p
= 0.
Aceasta este o ecuat, ie liniara s, i neomogena ın x(p) s, i o rezolvam corespunzator.Daca f (p) = p, obt, inem o solut, ie particulara.
Exemplu: y = x −4
9y′2
+8
27y′3.
Solut, ie: Facem notat, ia y′= p, deci dy = pdx . Obt, inem:
y = x −
4
9
p2+
8
27
p3⇒ dy = dx −
8
9
pdp +
8
9
p2dp.
Rezulta pdx = dx −8
9pdp +
8
9p2dp, deci:
(p − 1)(dx −
8
9
pdp) = 0.
Distingem cazurile:Daca dx =
8
9pdp, atunci x =
4
9p2+ c s, i, ınlocuind ın ecuat, ia init, iala, gasim y =
8
27p3+ c. Solut, ia
poate � prezentata parametric:{
x =4
9p2+ c
y =8
27p3+ c
Daca p = 1, avem o solut, ie particulara y = x + c, iar constanta se obt, ine a � c = −4
27, din
ecuat, ia init, iala.
7.8 Sisteme diferent, iale cu coe�cient, i constant, iCa ın cazul sistemelor de ecuat, ii liniare, putem scrie un sistem ın forma matriceala X ′
= A ⋅ X ,unde A este matricea coe�cient, ilor.
Distingem mai multe cazuri, ın funct, ie de proprietat, ile matricei A.Daca A se diagonalizeaza, �e {�i} valorile proprii ale sale, iar {ui} vectorii proprii asociat, i.
Atunci funct, iile:{xi(t) = e
�i t⋅ ui}i
59

dau o baza ın spat, iul vectorial al solut, iilor. Solut, ia generala poate � scrisa, atunci, ca o combinat, ieliniara a acestora:
x(t) = ∑
i
cixi(t).
Se obis, nuies, te ca solut, ia sa �e prezentata sub forma matriceala, alcatuind matricea fun-damentala a sistemului: X (t) = t
(e�i tui).
Exemplu:{
x′
= x − y
y′
= −4x + y.
Matricea sistemului este A =(
1 −1
−4 1 ).
Obt, inem �1 = 1 s, i �2 = 3. Cum acestea au multiplicitatea algebrica egala cu 1, rezulta camatricea se diagonalizeaza. Se obt, in subspat, ii proprii de dimensiune 1, bazele �ind, de exemplu:
X1 =(
1
2), X2 =
(
1
−2).
Atunci solut, ia generala se scrie:
X (t) =(
x(t)
y(t))= C1e
�1t
(
1
2)+ C2e
�2t
(
1
−2).
Atunci matricea fundamentala se scrie:
X (t) =(
C1e−t+ C2e
3t
2C1e−t− 2C2e
3t).
DacaAnu se diagonalizeaza, �e �1,… , �k valorile proprii, de multiplicitat, i algebrice n1,… , nk .Atunci se cauta solut, ii de forma:
xj(t) =
k
∑
i=1
Pij(t)e�i t, gradPij ≤ ni − 1.
Inlocuim ın ecuat, ia init, iala s, i gasim Pij . Aceasta metoda poarta numele de metoda coe�cient, ilornedeterminat, i.
60

Exemplu:{
x′
1= x2
x′
2= −x1 + 2x2
Solut, ie: Matricea sistemului este A =(
0 1
−1 2), care are valoarea proprie � = 1, de multipli-
citate algebrica 2. Se poate veri�ca faptul ca matricea nu este diagonalizabila s, i atunci cautamsolut, ii de forma:
{
x1(t) = (A1 + B1t)et
x2(t) = (A2 + B2t)et
Inlocuim ın sistem s, i obt, inem un sistem liniar cu necunoscutele A1, A2, B1, B2, care va � dublunedeterminat. As, adar, solut, ia se prezinta cu 2 parametri ın forma:
(A1, A2, B1, B2) ∈ {(�, � + �, �, �) ∣ �, � ∈ ℝ}.
Rezulta ca matricea fundamentala este:
X (t) =(
(� + �t)et
(� + � + �t)et)
Daca matricea A nu se diagonalizeaza, iar �i ∈ ℂ, lucram cu numere complexe.Exemplu:
{
x′
1= 2x1 + x2
x′
2= −8x1 − 2x2
s, tiind ca solut, ia cont, ine la t = 0 punctul M0(1, 0).
Solut, ie: Matricea sistemului este A =(
2 1
−8 2).
Valorile sale proprii sınt �1,2 = ±2i. Atunci subspat, iul invariant va �:
V�1 = Sp{(1, −2 + 2i)}.
Obt, inem o solut, ie generala ın forma:
x1(t) = e2it
(
1
−2 + 2i)= (cos 2t + i sin 2t)
(
1
−2 + 2i).
Din proprietat, ile algebrice ale numerelor complexe, avem ca xt(t) = x1(t) s, i atunci solut, iagenerala va � x(t) = c1x1(t) + c2x2(t).
Folosind condit, iile init, iale, avem ca x1(0) = 1 s, i x2(0) = 0, deci c1 = c2 = 1.
61

7.9 Exponent, iale matriceale s, i sisteme folosind forma Jor-dan
Exemplu: Fie matricea:
A =
⎛
⎜
⎜
⎝
1 −1 1
1 1 −1
0 −1 2
⎞
⎟
⎟
⎠
(a) Sa se calculeze eAt , pentru t ∈ ℝ;
(b) Sa se determine solut, ia generala a sistemului X ′= AX , apoi solut, ia particulara care veri�ca
condit, ia x(0) = 1, y(0) = 2, z(0) = 0.
Solut, ie:(a) Matricea A are valorile proprii �1 = �2 = 1, �3 = 2. Vectorii proprii (baze ın subspat, iile
invariante) sınt:v1 = (1, 1, 1), v2 = (1, 0, 1).
Forma canonica Jordan a matricei se obt, ine a �:
J =
⎛
⎜
⎜
⎝
1 0 0
1 1 0
0 0 2
⎞
⎟
⎟
⎠
,
folosind matricea de trecere
T =
⎛
⎜
⎜
⎝
2 1 1
0 1 0
1 1 1
⎞
⎟
⎟
⎠
.
Deci A = T JT−1.
S, tim din teorie ca eAt = T ⋅ eJ t⋅ T
−1.Folosim acum dezvoltarea ın serie Taylor a funct, iei exponent, iale:
ex= ∑
n≥0
x
n!
,
adevarata s, i pentru matrice. In plus, daca matricea este diagonala, exponent, iala sa va cont, ineexponent, iala pe diagonala, adica, daca M = diag(x1, x2,… , xn), atunci eM = diag(e
x1,… , e
xn).
Pentru a folosi aceasta proprietate, ne legam de descompunerea ın blocuri Jordan a lui A. FieJ1 blocul Jordan de dimensiune 2, corespunzator valorii proprii �1 = �2 = 1 s, i J2 blocul Jordande dimensiune 1 corespunzator valorii proprii �3 = 2. Avem descompunerea pe blocuri s, i pentruexponent, iala:
eJ t=(
eJ1t
0
0 eJ2t)
62

Cum eJ2t
= e2t , calculam celalalt bloc:
eJ1t
= e
⎛
⎜
⎜
⎝
t 0
t t
⎞
⎟
⎟
⎠
= e
⎛
⎜
⎜
⎝
t 0
0 t
⎞
⎟
⎟
⎠
⎛
⎜
⎜
⎝
0 0
t 0
⎞
⎟
⎟
⎠
=(
et
0
0 et)⋅
[(
1 0
0 1)+
1
1! (
0 0
t 0)]
=(
et
0
tetet)
Am folosit faptul ca(
0 0
t 0)
2
= 0, as, adar din seria Taylor va � su�cient sa pastram primii 2
termeni. Calculam s, i T −1, obt, inınd:
T−1=
⎛
⎜
⎜
⎝
1 0 −1
0 1 0
−1 −1 2
⎞
⎟
⎟
⎠
gasim, ın �ne:
eAt
= T ⋅ eJ t⋅ T
−1=
⎛
⎜
⎜
⎝
et(t + 2) − e
2tet− e
2t−e
t(t + 2) + 2e
2t
tet
et
−tet
et(t + 1) − e
2tet− e
2t−e
t(t + 1) + 2e
2t
⎞
⎟
⎟
⎠
(b) Conform teoriei, solut, ia generala a sistemului este:
X (t) = eAt⋅
⎛
⎜
⎜
⎝
C1
C2
C3
⎞
⎟
⎟
⎠
,
constantele Ci determinındu-se din condit, iile init, iale. In acest caz:
X (t) = eAtX (0) = e
At
⎛
⎜
⎜
⎝
1
2
0
⎞
⎟
⎟
⎠
63

Exemplu 2: Sa se determine solut, ia sistemului diferent, ial liniar neomogen:⎧⎪⎪⎪
⎨⎪⎪⎪⎩
x′
= 2x − y
y′
= −x + 2z + etz
z′
= −y + 2,
s, tiind ca satisface condit, iile init, iale X (0) =⎛
⎜
⎜
⎝
0
1
0
⎞
⎟
⎟
⎠
.
Solut, ie: Fie matricele:
X =
⎛
⎜
⎜
⎝
x
y
z
⎞
⎟
⎟
⎠
, A =
⎛
⎜
⎜
⎝
2 −1 0
−1 0 2
0 −1 2
⎞
⎟
⎟
⎠
, B(t) =
⎛
⎜
⎜
⎝
0
et
0
⎞
⎟
⎟
⎠
.
Atunci sistemul se scrie matriceal X ′= AX + B(t). Valorile proprii ale matricei A sınt �1 =
�2 = 1 s, i �3 = 2. Avem vectorul propriu (1, 1, 1) baza ın V�1,2 s, i vectorul (2, 0, 1) baza ın V�3 .Aducem matricea A la forma canonica Jordan, folosind matricea de trecere:
T =
⎛
⎜
⎜
⎝
0 1 2
−1 1 0
0 1 1
⎞
⎟
⎟
⎠
⇒ T−1=
⎛
⎜
⎜
⎝
−1 −1 2
−1 0 2
1 0 −1
⎞
⎟
⎟
⎠
Forma canonica Jordan se obt, ine a �:
J =
⎛
⎜
⎜
⎝
1 0 0
1 1 0
0 0 2
⎞
⎟
⎟
⎠
.
Putem descompune matricea Jordan ın doua blocuri, unul de dimensiune 2 s, i unul de dimen-siune 1, ceea ce ne ajuta sa calculam:
eAt
=
⎛
⎜
⎜
⎝
2e2t− (t + 1)e
t−te
t2e
t(t + 1) − 2e
2t
−tet
(1 − t)et
2tet
2e2t− (t + 1)e
t−te
t2e
t(t + 1) − 2e
2t
⎞
⎟
⎟
⎠
Conform teoriei, obt, inem solut, ia problemei Cauchy (t, inınd cont de valorile init, iale) sub forma:
X (t) = eAtX (0) +
∫
t
0
eA(t−s)
B(s)ds.
Integrala se calculeaza integrınd �ecare din elementele matricei s, i obt, inem, ın �nal:
X (t) = et
⎛
⎜
⎜
⎝
−t −t2
2
1 −t2
2
−t −t2
2
⎞
⎟
⎟
⎠
64

SEMINAR 8
RECAPITULARE EXAMEN
8.1 Model 1
1. Fie spat, iul vectorial:
V = {p ∈ ℝ2[X ] ∣ p′(1) = 0}.
(a) Gasit, i complementul sau ortogonal V ⟂.
(b) Gasit, i o baza ortonormata ın V ⊕ V⟂.
Indicat, ii: (a) V = {aX2+ bX + c ∣ 2a + b = 0}, deci dimV = 2 ⇒ dimV
⟂= 1.
(b) Se ia reuniunea bazelor din V s, i V ⟂, care este o baza a sumei directe. Se aplica Gram-Schmidt pentru aceasta.
2. Aducet, i la forma canonica s, i desenat, i conica:
x2− 4xy + 4y
2− 6x + 2y + 1 = 0.
Raspuns: Conica este o parabola:
65
3. Rezolvat, i ecuat, iile diferent, iale:
(a) (x + y − 2)dx + (x + y)dy = 0; (ecuat, ie exacta)
(b) xy′= y + x
2y2, x > 0. (ecuat, ie Riccati)
4. Rezolvat, i sistemul diferent, ial:⎧⎪⎪⎪
⎨⎪⎪⎪⎩
x′
= y + z
y′
= x + z
z′
= x + y
cu condit, iile init, iale x(0) = −1, y(0) = 0, z(0) = 0.Indicat, ie: Se aduce matricea sistemului la forma canonica Jordan: (matricea este chiar diago-
nalizabila):
A =
⎛
⎜
⎜
⎝
0 1 1
1 0 1
1 1 0
⎞
⎟
⎟
⎠
⇒ J =
⎛
⎜
⎜
⎝
−1 0 0
0 −1 0
0 0 2
⎞
⎟
⎟
⎠
,
apoi se calculeaza eAt folosind aceasta forma simpli�cata.
8.2 Model 2Fie spat, iul vectorial:
V = {(x, y, z, t) ∈ ℝ4∣ x + y − 2z + t = 0}.
(a) Gasit, i complementul ortogonal, V ⟂;
66

(b) Gasit, i o baza ortonormata ın V .
Indicat, ie: dimV = 3, deci dimV⟂= 1. Avem:
V = {(−� + 2� − , �, �, ) ∈ ℝ4} = Sp{(−1, 1, 0, 0), (2, 0, 1, 0), (−1, 0, 0, 1)}
s, i se alege V = Sp{(a, b, c, d)} astfel ıncıt
⟨(a, b, c, d), v⟩ = 0,
unde v este, pe rınd, �ecare vector din baza lui V .
2. Aducet, i la forma canonica s, i reprezentat, i conica:
x2− 2xy + 3y
2− 4x + 6y − 4 = 0.
Raspuns: Conica este o elipsa:
3. Rezolvat, i ecuat, iile diferent, iale:
(a) y′+ y sin x = − sin x cos x ; (ecuat, ie liniara s, i neomogena)
(b) (3x2− y) + (3y
2− x)y
′= 0. (ecuat, ie exacta)
4. Rezolvat, i sistemul diferent, ial:{
x′
= x − y
y′
= −4x + y
,
cu condit, iile init, iale x(0) = 1, y(0) = −1.Indicat, ie: Se poate folosi forma Jordan pentru matricea sistemului sau se pot aplica metodele
din §7.8, deoarece matricea este diagonalizabila s, i este 2 × 2.
67
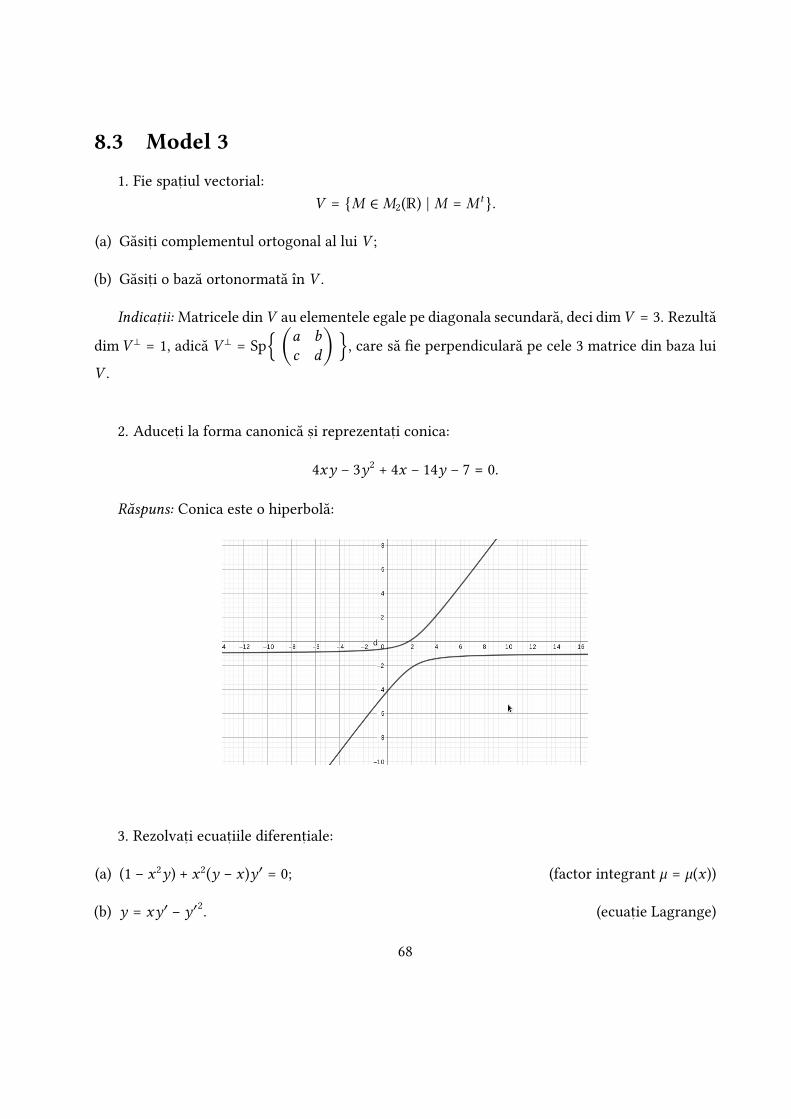
8.3 Model 31. Fie spat, iul vectorial:
V = {M ∈ M2(ℝ) ∣ M = Mt}.
(a) Gasit, i complementul ortogonal al lui V ;
(b) Gasit, i o baza ortonormata ın V .
Indicat, ii: Matricele din V au elementele egale pe diagonala secundara, deci dimV = 3. Rezulta
dimV⟂= 1, adica V ⟂
= Sp
{
(
a b
c d)
}
, care sa �e perpendiculara pe cele 3 matrice din baza luiV .
2. Aducet, i la forma canonica s, i reprezentat, i conica:
4xy − 3y2+ 4x − 14y − 7 = 0.
Raspuns: Conica este o hiperbola:
3. Rezolvat, i ecuat, iile diferent, iale:
(a) (1 − x2y) + x
2(y − x)y
′= 0; (factor integrant � = �(x))
(b) y = xy′− y
′2. (ecuat, ie Lagrange)
68

4. Fie matricea:
A =
⎛
⎜
⎜
⎝
1 −1 1
1 1 −1
0 −1 2
⎞
⎟
⎟
⎠
(a) Sa se calculeze eAt , pentru t ∈ ℝ;
(b) Sa se determine solut, ia generala a sistemului X ′= AX , apoi solut, ia particulara care veri�ca
condit, ia x(0) = 1, y(0) = 2, z(0) = 0.
Indicat, ie: Vezi §7.9 (completat, i detaliile lipsa din rezolvare).
69
70
INDEX
Aalgoritm
Gram-Schmidt, 38
Mmetoda Gauss-Jordan, 6
inversare, 6sisteme liniare, 7
Ooperat, ie, 4
asociativa, 4comutativa, 4cu element neutru, 4cu elemente inversabile, 4distributiva, 5interna, 4
Ppolinom
caracteristic, 27produs
scalar, 37
Rrelat, ie
antisimetrica, 3binara, 3
echivalent, a, 4ordine, 4re�exiva, 3simetrica, 3tranzitiva, 3
Sspat, iu vectorial, 11
baza, 17baza canonica, 17combinat, ie liniara, 15coordonatele unui vector, 18dimensiune, 17euclidian, 38exemple, 12matricea aplicat, iei, 19matricea de trecere, 20sistem de generatori, 16subspat, iu, 13suma directa dde subspat, ii, 14suma subspat, iilor, 14vectori liniar independent, i, 15
structuri algebricecorp, 5grup, 5inel, 5monoid, 5
71
mor�sm, 5substructuri, 6
subspat, iucomplement ortogonal, 38suma, 25
directa, 25
Tteorema
Cayley-Hamilton, 28Grassmann, 18rang-defect, 21schimbului, 16
Vvaloare
proprie, 27valoare proprie
multiplicitate algebrica, 28multiplicitate geometrica, 28spectru, 27
vectorcosinus, 37norma, 37propriu, 27
vector propriusubspat, iu invariant, 28
72
BIBLIOGRAFIE
[Brınzanescu and Stanasila, 1998] Brınzanescu, V. and Stanasila, O. (1998). Matematici speciale.ALL.
[Balan, 2004] Balan, V. (2004). Algebra liniara, geometrie analitica. online.
[Purcaru, 2010] Purcaru, M. (2010). Algebra liniara, geometrie analitica si ecuatii diferentiale.online.
73



![LINOgRAvURA,patrimoniu.piscu.ro/wp-content/uploads/2016/12/...se va face o singur` copiere cu indigo, direct pe placa de forex. Pentru matri]a pozitiv se va copia pe calc, apoi, imaginea](https://static.fdocumente.com/doc/165x107/5e51471159a03052481b23d9/linogravura-se-va-face-o-singur-copiere-cu-indigo-direct-pe-placa-de-forex.jpg)

![Drenajul platformelor exterioare...deoarece materialele `n suspensie antrenate de precipita]ii sunt distribuite pe toat\ lungimea sistemului `ntre]inere simpl\ se pot folosi [i pentru](https://static.fdocumente.com/doc/165x107/5e4f483467772b5dc556cedd/drenajul-platformelor-deoarece-materialele-n-suspensie-antrenate-de-precipitaii.jpg)





![ESECUTIVO VICTRIX EXA EXPORT M - Ecalorifere.ro · VICTRIX EXA ErP poate fi controlat` de la distan]` prin intermediul noii aplica]ii DOMINUS (disponibil` toamna 2016). Simpl` [i](https://static.fdocumente.com/doc/165x107/60483894068aa75ef82ecd74/esecutivo-victrix-exa-export-m-victrix-exa-erp-poate-fi-controlat-de-la-distan.jpg)






