.5. Cicluri limită - aut.upt.ro · Prof. dr. ing. Toma L. Dragomir, TEORIA SISTEMELOR II -...
14
Prof. dr. ing. Toma L. Dragomir, TEORIA SISTEMELOR II - 2014/2015 270 § 4.5. Cicluri limită 1. Aspecte generale referitoare la ciclurile limită La fel ca și sistemele liniare, sistemele neliniare se pot găsi în regimuri periodice. În portretul de stare regimurilor periodice le corespund traiectorii de stare închise denumite orbite închise sau traiectorii periodice. Regimurile periodice pot fi determinate de acțiunea permanentă a unor semnale exterioare sistemului sau de procese interne din sistem. În acest paragraf ne referim numai la cea de a doua categorie de regimuri periodice: cele determinate de procese interne din sistem. Fie n R x starea sistemului autonom f(x) (t) x , x(t0) = x0, (4.62) în care au loc evoluţii periodice de perioada T . Aceasta înseamnă că x(t) satisface o relaţie de forma: t x T t x , R t . (4.63) Evoluției sistemului îi pot corespunde două tipuri de orbite închise: - traiectorii periodice cu vecinătăţi periodice; - traiectorii periodice fără vecinătăţi periodice. Traiectoriile periodice cu vecinătăţi perio- dice încercuiesc, de regulă, în portretul de stare un punct de echilibru de tip centru. În particular, în cazul sistemelor de ordinul II traiectoriile periodice cu vecină- tăţi periodice pot avea formă de elipsă sau formă de cerc. Pentru acest tip de traiec- torii este caracteristic faptul că traiectoria pe care evoluează sistemul este „dictată” de punctul iniţial. În Fig. 240 apar patru puncte iniţiale (): 4 3 2 1 , , , . Odată adus sistemul, prin mijloace exterioare, în unul din aceste puncte, și lăsat apoi liber, el va evolua ulterior pe traiectoria care trece prin acel punct (I, II, III) (). În cazul traiectoriilor periodice fără vecinătăţi periodice lucrurile stau diferit. Dacă, iniţi- al, punctul de funcționare al sistemului se găseşte pe o astfel de traiectorie, atunci, sistemul continuă să evolueaze (periodic) pe traiectorie. Dacă, iniţial, punctul de funcționare este abătut de la o astfel de traiectorie atunci, după caz, sistemul va tinde să revină asimptotic pe traiectoria periodică sau să se îndepărteze de aceasta. Acest tip de traiectorii periodice poartă numele de cicluri limită. În acest context vorbim și despre stabilitatea ciclurilor limită.. Distinem trei categorii de cicluri limită: stabile, semistabile, instabile. Fig. 241 ilustrează cele trei categorii de cicluri prin intermediul portretului de stare al unui sistem de ordinul II. Fig. 240. Traiectorii de stare cu vecinătăți periodice. 1 x 2 x 0 4 3 2 1 III II I
Transcript of .5. Cicluri limită - aut.upt.ro · Prof. dr. ing. Toma L. Dragomir, TEORIA SISTEMELOR II -...
Prof. dr. ing. Toma L. Dragomir, TEORIA SISTEMELOR II - 2014/2015 270
§ 4.5. Cicluri limită 1. Aspecte generale referitoare la ciclurile limită La fel ca și sistemele liniare, sistemele neliniare se pot găsi în regimuri periodice. În portretul de stare regimurilor periodice le corespund traiectorii de stare închise denumite orbite închise sau traiectorii periodice. Regimurile periodice pot fi determinate de acțiunea permanentă a unor semnale exterioare sistemului sau de procese interne din sistem. În acest paragraf ne referim numai la cea de a doua categorie de regimuri periodice: cele determinate de procese interne din sistem.
Fie nRx starea sistemului autonom
f(x)(t)x , x(t0) = x0, (4.62)
în care au loc evoluţii periodice de perioada T . Aceasta înseamnă că x(t) satisface o relaţie de forma:
txTtx , Rt . (4.63)
Evoluției sistemului îi pot corespunde două tipuri de orbite închise:
- traiectorii periodice cu vecinătăţi periodice; - traiectorii periodice fără vecinătăţi periodice.
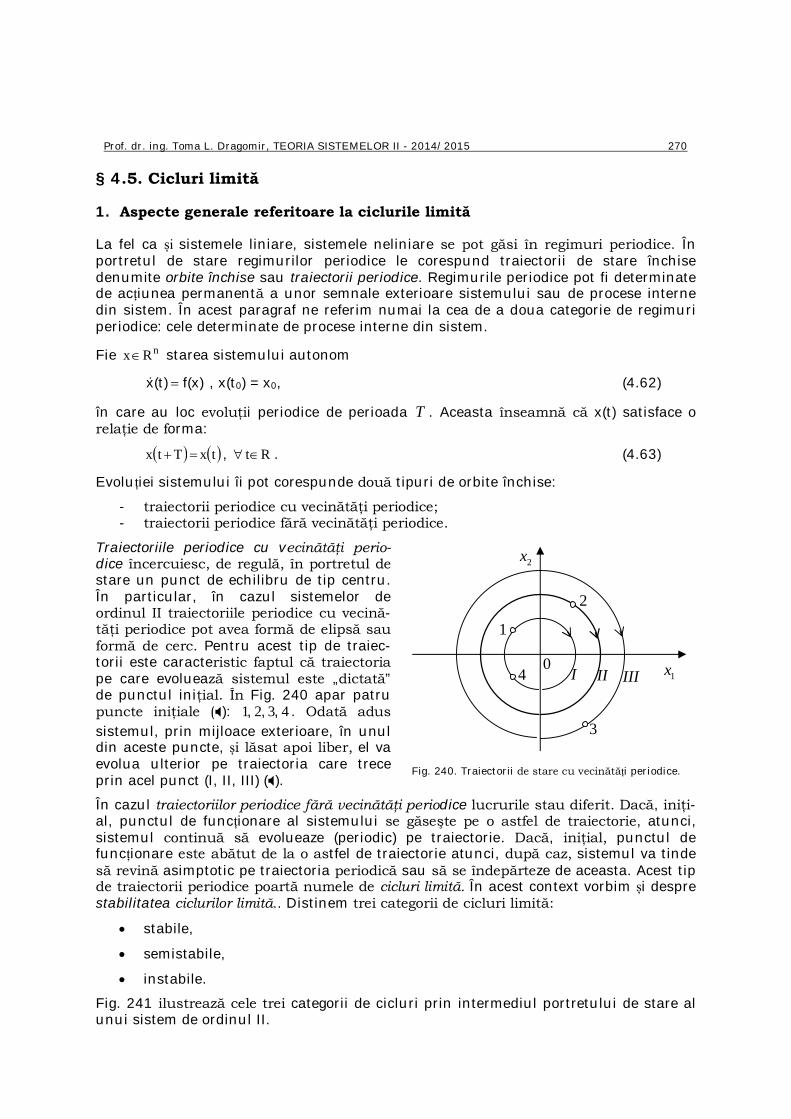
Traiectoriile periodice cu vecinătăţi perio-dice încercuiesc, de regulă, în portretul de stare un punct de echilibru de tip centru. În particular, în cazul sistemelor de ordinul II traiectoriile periodice cu vecină-tăţi periodice pot avea formă de elipsă sau formă de cerc. Pentru acest tip de traiec-torii este caracteristic faptul că traiectoria pe care evoluează sistemul este „dictată” de punctul iniţial. În Fig. 240 apar patru puncte iniţiale (): 4321 ,,, . Odată adus sistemul, prin mijloace exterioare, în unul din aceste puncte, și lăsat apoi liber, el va evolua ulterior pe traiectoria care trece prin acel punct (I, II, III) ().
În cazul traiectoriilor periodice fără vecinătăţi periodice lucrurile stau diferit. Dacă, iniţi-al, punctul de funcționare al sistemului se găseşte pe o astfel de traiectorie, atunci, sistemul continuă să evolueaze (periodic) pe traiectorie. Dacă, iniţial, punctul de funcționare este abătut de la o astfel de traiectorie atunci, după caz, sistemul va tinde să revină asimptotic pe traiectoria periodică sau să se îndepărteze de aceasta. Acest tip de traiectorii periodice poartă numele de cicluri limită. În acest context vorbim și despre stabilitatea ciclurilor limită.. Distinem trei categorii de cicluri limită:
stabile,
semistabile,
instabile.
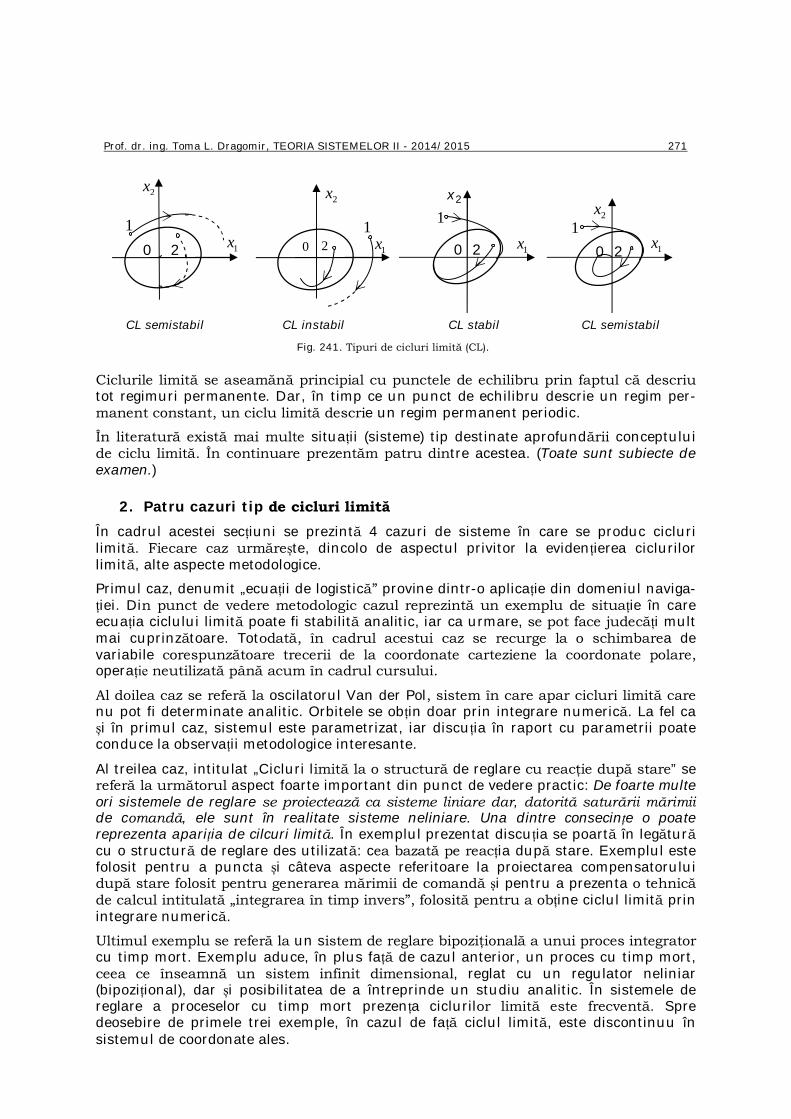
Fig. 241 ilustrează cele trei categorii de cicluri prin intermediul portretului de stare al unui sistem de ordinul II.
Fig. 240. Traiectorii de stare cu vecinătăți periodice.
1x
2x
0 4
3
2
1
III II I
Prof. dr. ing. Toma L. Dragomir, TEORIA SISTEMELOR II - 2014/2015 271
Ciclurile limită se aseamănă principial cu punctele de echilibru prin faptul că descriu tot regimuri permanente. Dar, în timp ce un punct de echilibru descrie un regim per-manent constant, un ciclu limită descrie un regim permanent periodic.
În literatură există mai multe situații (sisteme) tip destinate aprofundării conceptului de ciclu limită. În continuare prezentăm patru dintre acestea. (Toate sunt subiecte de examen.)
2. Patru cazuri tip de cicluri limită În cadrul acestei secțiuni se prezintă 4 cazuri de sisteme în care se produc cicluri limită. Fiecare caz urmărește, dincolo de aspectul privitor la evidențierea ciclurilor limită, alte aspecte metodologice.
Primul caz, denumit „ecuații de logistică” provine dintr-o aplicație din domeniul naviga-ției. Din punct de vedere metodologic cazul reprezintă un exemplu de situație în care ecuația ciclului limită poate fi stabilită analitic, iar ca urmare, se pot face judecăți mult mai cuprinzătoare. Totodată, în cadrul acestui caz se recurge la o schimbarea de variabile corespunzătoare trecerii de la coordonate carteziene la coordonate polare, operație neutilizată până acum în cadrul cursului.
Al doilea caz se referă la oscilatorul Van der Pol, sistem în care apar cicluri limită care nu pot fi determinate analitic. Orbitele se obțin doar prin integrare numerică. La fel ca și în primul caz, sistemul este parametrizat, iar discuția în raport cu parametrii poate conduce la observații metodologice interesante.
Al treilea caz, intitulat „Cicluri limită la o structură de reglare cu reacţie după stare” se referă la următorul aspect foarte important din punct de vedere practic: De foarte multe ori sistemele de reglare se proiectează ca sisteme liniare dar, datorită saturării mărimii de comandă, ele sunt în realitate sisteme neliniare. Una dintre consecințe o poate reprezenta apariția de cilcuri limită. În exemplul prezentat discuția se poartă în legătură cu o structură de reglare des utilizată: cea bazată pe reacția după stare. Exemplul este folosit pentru a puncta și câteva aspecte referitoare la proiectarea compensatorului după stare folosit pentru generarea mărimii de comandă și pentru a prezenta o tehnică de calcul intitulată „integrarea în timp invers”, folosită pentru a obține ciclul limită prin integrare numerică.
Ultimul exemplu se referă la un sistem de reglare bipoziţională a unui proces integrator cu timp mort. Exemplu aduce, în plus față de cazul anterior, un proces cu timp mort, ceea ce înseamnă un sistem infinit dimensional, reglat cu un regulator neliniar (bipozițional), dar și posibilitatea de a întreprinde un studiu analitic. În sistemele de reglare a proceselor cu timp mort prezența ciclurilor limită este frecventă. Spre deosebire de primele trei exemple, în cazul de față ciclul limită, este discontinuu în sistemul de coordonate ales.
1x
2x
1x
2x
1 1
0 2 0 2 1x
2x
1 1 1x
2x
0 2 20
CL semistabil CL instabil CL stabil CL semistabil
Fig. 241. Tipuri de cicluri limită (CL).

Prof. dr. ing. Toma L. Dragomir, TEORIA SISTEMELOR II - 2014/2015 272
2.1. Ecuaţiile de logistică
Ele se referă la mişcarea unui punct într-un plan descrisă de sistemul de ordinul II
)xx(xxx)xx(xxx22
21
2212
22
21
2121
202
101x(0)xx(0)x
R, . (4.64)
Pentru început considerăm cazul particular: 1 , 1 , pentru care (4.64) devine:
)xx1(xxx)xx1(xxx22
21212
22
21121
(4.65)
Studiul mişcării poate fi mult simplificat aducând ecuaţiile (4.64) şi (4.65), prin schimbarea de variabile (Fig. 242):
1
2
22
21
xxtg
xx (4.66)
în formă polară. 21 , xx reprezintă coordo-natele carteziene inițiale, iar , coordo-natele polare, noi.
În (4.66) toate mărimile sunt funcţii de timp. Pentru cazul particular al sistemului (4.65), prima ecuația de stare în coordonate polare se obține derivând prima ecuaţie din (4.66) în raport cu timpul. Rezultă:
22
21
222
21211
22
2112
22
21
221122
21
xx
x)]xx1(xx[x)]xx1(xx[
xx
xxxxxxdtd
222
21
22
21
22
21 1
xx
)xx1)(xx(
,
adică ecuaţia
)1( 2 . (4.67.1).
Derivând a doua ecuaţie din (4.66) în raport cu timpul se obţine
21
121221
2x
xxxx
cos
1xx
dtd tg
dtd tg
.
Înlocuind apoi în ultima relaţie expresiile lui 21 x,x din (4.65) deducem egalitatea
22 cos1
cos1 , adică a doua ecuație de stare în coordonate polare:
1 . (4.67.2).
Prin urmare, în locul ecuațiilor de stare (4.65) avem ecuaţiile de stare:
11 2
)( cu condiţiile iniţiale
10
20
220
210
xx)0(tg
xx)0(. (4.68).
0
,, 21 PxxP
1x 1x
2x
2x
Fig. 242. Referitoare la legătura dintre coordonatele polare și coordonatele carteziene

Prof. dr. ing. Toma L. Dragomir, TEORIA SISTEMELOR II - 2014/2015 273
Ecuaţiile (4.65) şi (4.68) sunt echivalente în orice punct al planului exceptând originea 0x,0x 21 , pentru care unghiul nu poate fi definit. Ecuațiile (4.68) prezintă
avantajul remarcabil de a avea variabilele de stare şi separate.
Din simpla examinare a primei relaţii din (4.68) rezultă că
1(t) (4.69)
este o soluţie a acestei ecuaţii. Deci cercul de rază unitară este o traiectorie a sistemului.
Totodată, observăm că din prima ecuație din (4.68) rezultă implicaţiile:
01
010
,,
.
Ca urmare, dacă este subunitară şi nenulă tendinţa lui este de creştere, iar dacă este supraunitară tendinţa lui este de scădere. Rezultă că traiectoria (4.69), reprezentată în Fig. 243, este un ciclu limită stabil întrucât orice variaţie a lui se soldează cu tendinţa de stabilizare a lui la valoarea 1 .
Din a doua ecuaţie (4.68) observăm că 0 scade în timp în mod continuu. Deoarece sensul pozitiv de cotare al argumentului este cel trigono-metric deducem că unghiul variază în sens orar după relaţia
;tt 0 (4.70).
Ciclul limită este exprimat de ultimele două ecuaţii (4.69) şi (4.70) (). Ele constituie un ansamblu de ecuaţii parametrice în coordonate polare. În coordonate carteziene lor le corespund pe baza relaţiilor de legătură (4.66) ecuaţii parametrice de forma: )sin(t(t)x),cos(t(t)x 21 . (4.71)
Vom observa, pe de altă parte, că sistemul (4.65) are punctul de echilibru ( ,0x1 0x2 ), pe când sistemul (4.68) nu are un punct de echilibru. Pentru a asigura
echivalența, în locul sistemului (4.68) vom considera sistemul:
0ρpentru0
0ρpentru1
)1( 2
arbitrar
(4.72)
Aspectele discutate anterior apar în Fig. 243: punctele ''','',' 111 sunt puncte iniţiale ex-terioare ciclului limită iar '2,2 puncte iniţiale interioare (). Analitic, traiectoriile de sta-re care pleacă din aceste puncte se obţin prin integrarea sistemului (4.68). Rezultă:
tt
;11c,ec1
1t
0
20
0t20 . (4.73)
1x
2x 1
1
ρ = 1 O 2 2`
1
Fig. 243. Ciclul limită din cazul ecuațiilor de logistică

Prof. dr. ing. Toma L. Dragomir, TEORIA SISTEMELOR II - 2014/2015 274
Observaţie: La soluţia (4.73) se poate ajunge pe diferite căi. Una dintre acestea este următoarea:
- se separă variabilelor în prima ecuaţie din (4.68): dt)ρρ(1
dρ2
,
- se face substituţia
2eeuch;uchρ
uuşi se obţin succesiv egalităţile:
dtduuchush
ushuch;dtuchush
du;dtu)sh(uch
duush 22
2
;
- având în vedere că uchush şi că ushuch se procedează la integrarea membru cu membru a ultimei egalităţi:
;euth
uth;e
uthuth
;tuthuth
ln;tuthln
;tuchlnushln;dtduuchush
ushuch
2t
02
2t
00
uu
tt
uu
u
u
t
t
0
000 0
;
- deoarece 222
2
2
22
ρ
11uch
11uch
1uch
uch
ushuth
, rezultă ;e t220
21111
- în final obţinem tθtθ;
e1ρ11
1t 0
2t20
.
În cazul general, când 1 , 1 , în locul egalităţii (4.73) se ajunge la formula:
tθtθ;
e1ρβ1
βtρ 0
t22α20
. (4.74)
Este ușor de observat că durata perioadei de parcurgere a ciclului limită este 2 secunde. În adevăr, ținând seamă de fapul că traiectoria de stare circulară se parcurge în sens orar rezultă că o perioadă corespunde unei variații =-2. Deoarece din (4.73) rezultă că = - t, deducem că 22tT secunde.
2.2. Oscilatorul Van der Pol
Sub denumirea de oscilator Van der Pol se înţelege sistemul (4.76) care reprezintă modelul matematic al unui circuit electric oscilant.
0tyty]ty1[ty 2 , 00 y(0)y,yy(0) . (4.76)
Definind variabilele de stare yx,yx 21 , MM-II (4.76) îi corespunde MM-ISI:
12212
21
xx)x1(xxx
,
02
01y(0)xy(0)x
(4.77).

Prof. dr. ing. Toma L. Dragomir, TEORIA SISTEMELOR II - 2014/2015 275
Spre deosebire de ecuaţiile de logistică în acest caz soluţiile nu se mai pot obţine anali-tic, ci doar numeric. Portretul de stare are aspectul din Fig. 244 (figură de principiu). El conţine următoarele elemente: punctul de echilibru ( ,0x1 0x2 ), ciclul limită (curba închisă trasată cu linie îngroşată) şi traiectorii de stare.
Urmărind traiectoriile de stare din vecinătatea ciclului limită rezultă că ciclul limită este stabil iar punctul de echilibru este instabil. Atât traiectoriile care încep din puncte situate în exteriorul ciclului limită cât şi cele care încep din puncte situate în interiorul ciclului limită tind înspre ciclul limită.
Pentru cazul particular 3,40 şi diferite condiţii iniţiale s-au obţinut comportările redate în figurile 245. Într-un caz sistemul se găsește iniţial în starea x10=1.95544, x20 = 0 care corespunde unui punct foarte apropiat de ciclul limită. Într-un al doilea caz sistemul se găseşte la momentul iniţial în exteriorul ciclului limită ajungând într-un timp foarte scurt în regim periodic. Un al treilea caz corespunde situației în care la momentul iniţial sistemul este scos din starea de echilibru în punctul x10=0.01, x20 = -0.01; se observă că odată cu trecerea timpului starea sistemului se îndepărtează de punctul de echilibru, ajungând în final pe ciclul limită.
La fel ca şi în exemplul precedent, ne punem problema determinării perioadei T în care punctul de funcționare parcurge ciclul limită. Nu vom putea obţine un rezultat exact sau o formulă de calcul, ci doar o aproximare numerică a valorii lui T. Pentru aceasta recurgem la coordonate polare operând în principiu cu rel. (4.66).
Astfel, după introducerea argumentului prin relaţiile:
)t(x)t(x
)t(x)t(sin22
21
2
,
)t(x)t(x
)t(x)t(cos22
21
1
și derivarea lor în raport cu timpul, rezultă
22
21
2121
xxxxxx)t(
.
Potrivit acestui rezultat se poate obţine prin integrare:
t
0 22
21
2121 dtxx
xxxxθ(t)
,
iar perioada T va corespunde duratei de parcurgere a ciclului limită, adică duratei unei variaţii a argumentului cu 2 .
1x
0
2x
Fig. 244. Ciclul limită din cazul oscilatorului Van der Pol.
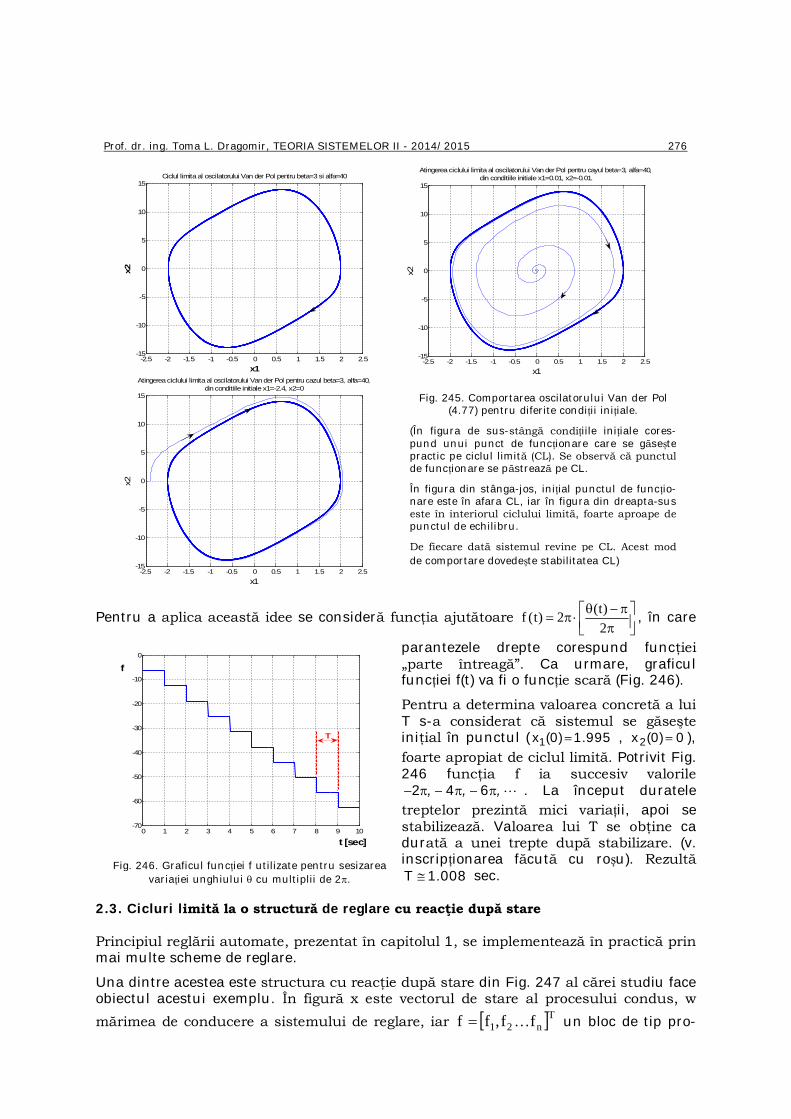
Prof. dr. ing. Toma L. Dragomir, TEORIA SISTEMELOR II - 2014/2015 276
Pentru a aplica această idee se consideră funcţia ajutătoare
2)t(2)t(f , în care
parantezele drepte corespund funcţiei „parte întreagă”. Ca urmare, graficul funcției f(t) va fi o funcție scară (Fig. 246).
Pentru a determina valoarea concretă a lui T s-a considerat că sistemul se găseşte iniţial în punctul ( 1.995(0)x1 , 0(0)x2 ), foarte apropiat de ciclul limită. Potrivit Fig. 246 funcţia f ia succesiv valorile
,,, 642 . La început duratele treptelor prezintă mici variații, apoi se stabilizează. Valoarea lui T se obţine ca durată a unei trepte după stabilizare. (v. inscripționarea făcută cu roșu). Rezultă
0081T . sec.
2.3. Cicluri limită la o structură de reglare cu reacţie după stare Principiul reglării automate, prezentat în capitolul 1, se implementează în practică prin mai multe scheme de reglare.
Una dintre acestea este structura cu reacţie după stare din Fig. 247 al cărei studiu face obiectul acestui exemplu. În figură x este vectorul de stare al procesului condus, w mărimea de conducere a sistemului de reglare, iar Tn21 ff,ff un bloc de tip pro-
0 1 2 3 4 5 6 7 8 9 10-70
-60
-50
-40
-30
-20
-10
0
t [sec]
f
T
Fig. 246. Graficul funcției f utilizate pentru sesizarea variației unghiului cu multiplii de 2.
-2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5-15
-10
-5
0
5
10
15
x1
x2
Atingerea ciclului limita al oscilatorului Van der Pol pentru cazul beta=3, alfa=40,din conditiile initiale x1=-2.4, x2=0
Fig. 245. Comportarea oscilatorului Van der Pol (4.77) pentru diferite condiții inițiale.
(În figura de sus-stângă condițiile inițiale cores-pund unui punct de funcționare care se găsește practic pe ciclul limită (CL). Se observă că punctul de funcționare se păstrează pe CL.
În figura din stânga-jos, inițial punctul de funcțio-nare este în afara CL, iar în figura din dreapta-sus este în interiorul ciclului limită, foarte aproape de punctul de echilibru.
De fiecare dată sistemul revine pe CL. Acest mod de comportare dovedește stabilitatea CL)
-2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5-15
-10
-5
0
5
10
15
x1
x2
Ciclul limita al oscilatorului Van der Pol pentru beta=3 si alfa=40
-2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5-15
-10
-5
0
5
10
15
x1
x2
Atingerea ciclului limita al oscilatorului Van der Pol pentru cayul beta=3, alfa=40, din conditiile initiale x1=0.01, x2=-0.01.

Prof. dr. ing. Toma L. Dragomir, TEORIA SISTEMELOR II - 2014/2015 277
porţional, un amplificator multicanal, denumit compensator (după stare). Presupunem că procesul condus este de tip SISO și că are ecuaţia de stare:
buAxx . . (4.78)
Toate variabilele de stare se presupun măsurabile, astfel că reacția după stare este realizabilă. Conducerea procesului se realizează folosind legea de reglare
w
x
xx
ff,fuadicăw,xfu
n
2
1
n21T
. (4.79)
Substituind (4.79) în (4.78) se obţine ecuaţia de stare a sistemului de reglare (sistemul închis): )wxf(bAxx T . O rescriem sub forma:
bwx)bfA(x T . (4.80)
Se demonstrează că dacă procesul condus este controlabil, adică rangul matricei de controlabilitate b]AAb[bM 1n
C este n nMrang C , atunci sistemului în circuit
închis i se pot impune orice n - poli (reali şi/sau perechi de poli complex-conjugaţi) 1). Polii se adoptă (alocă) astfel încât sistemul închis să fie stabil şi să fie îndeplinite obiec-tivele reglării.
La aplicarea acestui principiu trebuie avute în vedere particularităţile situaţiilor reale de implementare. Una dintre ele, singura la care ne referim, o reprezintă limitarea do-meniului de variație al mărimii de comandă maxmin u,uu , situație care în practică se petrece întotdeauna din diverse considerente tehnice. Fig. 248 se referă la un astfel de caz.
Considerăm 0min0max uu,uu . Datorită aces-
tei limitări legea de reglare wxfu T se apli-că sub această formă doar atâta timp cât suma
wxf T nu depăşeşte domeniul 00 u,uu .
Dacă wxf T depăşeşte limitele domeniului vom avea, după caz, 0uu(t) sau 0uu(t) . În intervalele de timp în care 0uu(t) sau
0uu(t) , sistemul devine un sistem neliniar.
Consecinţa limitării, adică a rămânerii lui u pe anumite intervale de timp în plafoanele de saturaţie 0u este aceea că în sistemul de reglare pot să apară cicluri limită. Aşadar, o funcţionare stabilă, care să ducă sistemul într-o stare impusă prin valoarea lui w nu mai e garantată decât într-o vecinătate restrânsă a punctului de echilibru corespunzător acestei valori. Pentru a exemplifica afirmaţiile de mai sus considerăm cazul particular al unui proces de ordinul II cu ecuaţiile:
uxxx2xxx
:P212
211
. (4.81).
1) Enunțul este cunoscut sub denumirea de „teorema alocării”.
Fig. 248. Schemă de reglare după stare cu limitarea mărimii de comandă.
Fig. 247. Schema de bază pentru un sistem de reglare după stare.

Prof. dr. ing. Toma L. Dragomir, TEORIA SISTEMELOR II - 2014/2015 278
Procesul e instabil întrucât are polii 2j1 . El este însă controlabil deoarece:
2Mrang0Mdet1120
AbbM1121
A,10
b CCC
.
În consecinţă, sistemului de reglare i se poate impune printr-o reacţie după stare de tipul (4.79), wxfxfu 2211 , orice pereche de poli reali sau complex-conjugaţi. În cadrul acestui exemplu alegem polii sistemului închis doar din considerente de stabilitate. Astfel, adoptăm polii 3j1 . Rezultă 2) un compensator cu amplificările
4f,2.5f 21 , iar ecuaţiile de stare ale sistemului în circuit închis devin:
w3x3.5xx2xxx
212
211
(4.82)
Studiem doar cazul 0w , când punctul de echilibru al sistemului închis este 0x,0x 2e1e (Fig. 249). Pentru început considerăm că nu există blocul de limitare BL (sau că u0 ∞). Polii sistemului închis fiind complex-conjugaţi rezultă că punctul de echilibru este de tip focar atractor, iar domeniul de atracţie îl reprezintă întregul plan al stărilor. Fig. 250 ilustrează acest lucru prin variațiile mărimilor de stare (figura a) și prin traiectoria de stare urmată de sistem (figura b).
0 2 4 6 8 10-6
-4
-2
0
2
4
6
8
10
12
14
t [sec]
x1, x2
x1
x2
-4 -2 0 2 4 6 8 10 12 14-6
-4
-2
0
2
4
6
8
10
12
x1
x2
O
- a - - b -
Considerăm în continuare cazul din Fig. 248 în situația când blocul de limitare BL are 1u0 . Aşadar, 11uuu 00 ,, , iar mărimea de comandă u se va calcula cu relaţia:
2) Compensatorul f = [f1 f2]
T se obţine astfel: i) Se calculează matricea sistemului cu expresia din (4.80):
2f11f121
2f1f10
1121TbfA . ii) Se calculează polinomul caracteristic al acestei matrice
)()()()( 2f1f23s2f22s2f1s1f1
21sTbfAsIs
. iii) Impunem sistemului (4.80) polii 3j121p , ,
adică polinomul caracteristic 4s22s2ps1pss ))(()( . iv) Egalăm cele două expresii ale polinomului caracteristic:
4s22s2f1f23s2f22s )()( . Prin identificarea coeficienţilor obţinem amplificările compensatorului: 42f521f ,. .
Fig. 250. Comportarea sistemului din Fig. 247 în regim liber în cazul când procesul condus are ecuațiile (4.82), legea de reglare este u = 2.5 x1 – 4 x2, iar condițiile inițiale sunt x10=10, x20=-5.
Fig. 249. Pentru w = 0 punctul de echilibru al sis-
temului (4.82) este x1e=0, x2e=0.
Prof. dr. ing. Toma L. Dragomir, TEORIA SISTEMELOR II - 2014/2015 279
1wxf11wxf1wxf
1wxf1u
T
TT
T
,,
, . (4.83)
Efectul acestei limitări îl reprezintă apariţia unui ciclu limită.
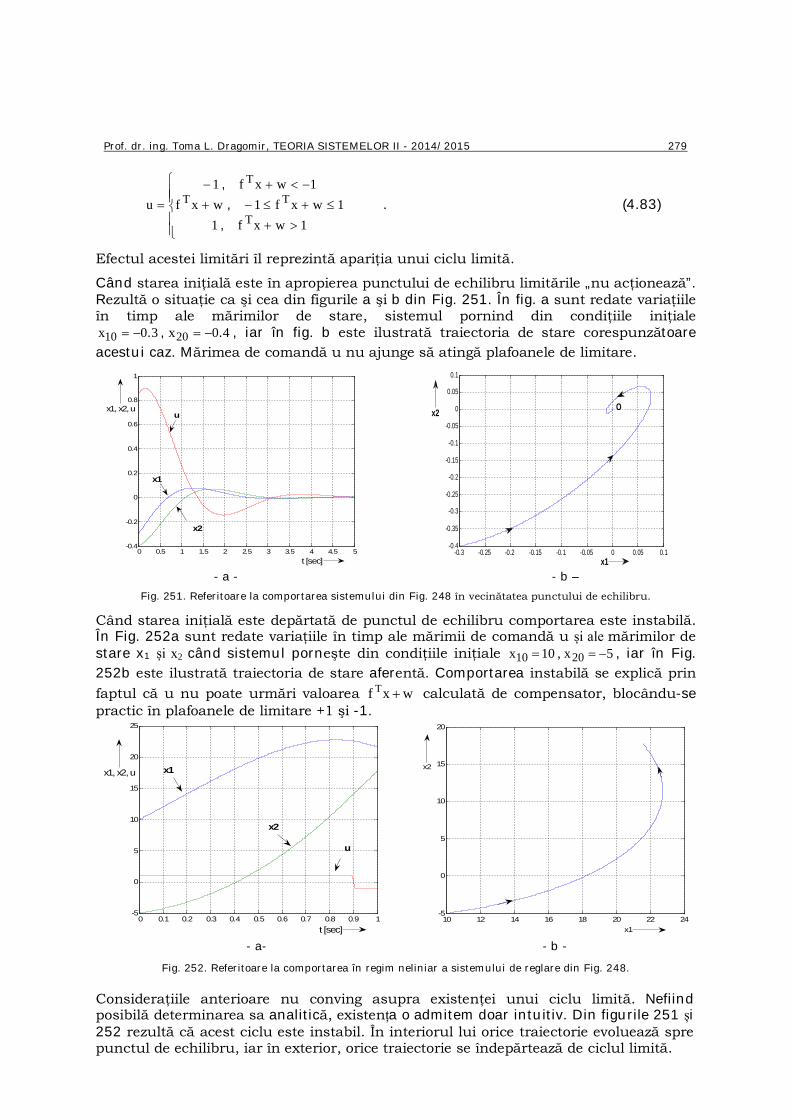
Când starea iniţială este în apropierea punctului de echilibru limitările „nu acţionează”. Rezultă o situaţie ca şi cea din figurile a şi b din Fig. 251. În fig. a sunt redate variaţiile în timp ale mărimilor de stare, sistemul pornind din condiţiile iniţiale
40x30x 2010 .,. , iar în fig. b este ilustrată traiectoria de stare corespunzătoare acestui caz. Mărimea de comandă u nu ajunge să atingă plafoanele de limitare.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
t [sec]
x1, x2, uu
x1
x2
-0.3 -0.25 -0.2 -0.15 -0.1 -0.05 0 0.05 0.1
-0.4
-0.35
-0.3
-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
x1
x2 O
- a - - b –
Când starea iniţială este depărtată de punctul de echilibru comportarea este instabilă. În Fig. 252a sunt redate variaţiile în timp ale mărimii de comandă u și ale mărimilor de stare x1 și x2 când sistemul porneşte din condiţiile iniţiale 5x,10x 2010 , iar în Fig. 252b este ilustrată traiectoria de stare aferentă. Comportarea instabilă se explică prin faptul că u nu poate urmări valoarea wxf T calculată de compensator, blocându-se practic în plafoanele de limitare +1 şi -1.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-5
0
5
10
15
20
25
t [sec]
x1, x2, u
u
x1
x2
10 12 14 16 18 20 22 24-5
0
5
10
15
20
x1
x2
- a- - b -
Consideraţiile anterioare nu conving asupra existenţei unui ciclu limită. Nefiind posibilă determinarea sa analitică, existența o admitem doar intuitiv. Din figurile 251 și 252 rezultă că acest ciclu este instabil. În interiorul lui orice traiectorie evoluează spre punctul de echilibru, iar în exterior, orice traiectorie se îndepărtează de ciclul limită.
Fig. 251. Referitoare la comportarea sistemului din Fig. 248 în vecinătatea punctului de echilibru.
Fig. 252. Referitoare la comportarea în regim neliniar a sistemului de reglare din Fig. 248.
Prof. dr. ing. Toma L. Dragomir, TEORIA SISTEMELOR II - 2014/2015 280
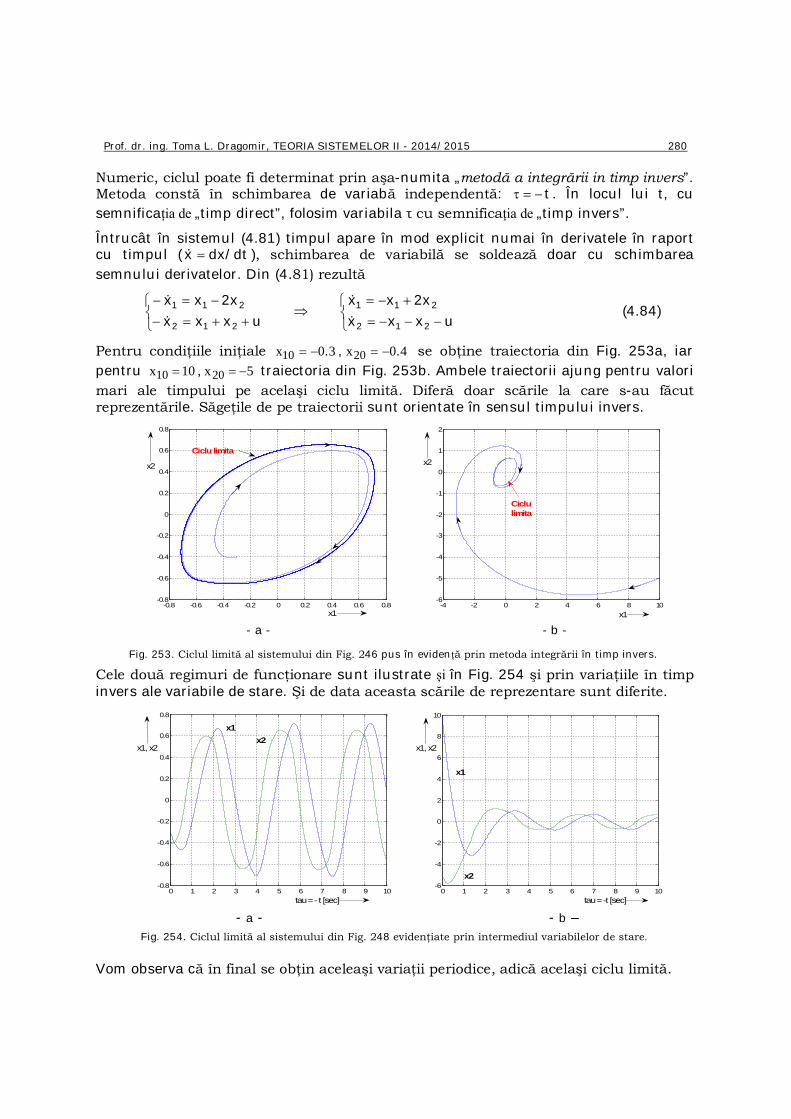
Numeric, ciclul poate fi determinat prin aşa-numita „metodă a integrării in timp invers”. Metoda constă în schimbarea de variabă independentă: t . În locul lui t, cu semnificația de „timp direct”, folosim variabila τ cu semnificația de „timp invers”.
Întrucât în sistemul (4.81) timpul apare în mod explicit numai în derivatele în raport cu timpul ( dx/dtx ), schimbarea de variabilă se soldează doar cu schimbarea semnului derivatelor. Din (4.81) rezultă
uxxx2xxx
uxxx2xxx
212
211
212
211
(4.84)
Pentru condiţiile iniţiale 40x30x 2010 .,. se obţine traiectoria din Fig. 253a, iar pentru 5x,10x 2010 traiectoria din Fig. 253b. Ambele traiectorii ajung pentru valori mari ale timpului pe acelaşi ciclu limită. Diferă doar scările la care s-au făcut reprezentările. Săgeţile de pe traiectorii sunt orientate în sensul timpului invers.
-0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
x1
x2
Ciclu limita
-4 -2 0 2 4 6 8 10-6
-5
-4
-3
-2
-1
0
1
2
x1
x2
Ciclulimita
- a - - b -
Cele două regimuri de funcţionare sunt ilustrate și în Fig. 254 şi prin variaţiile în timp invers ale variabile de stare. Şi de data aceasta scările de reprezentare sunt diferite.
0 1 2 3 4 5 6 7 8 9 10-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
tau = - t [sec]
x1, x2
x1x2
0 1 2 3 4 5 6 7 8 9 10-6
-4
-2
0
2
4
6
8
10
tau = -t [sec]
x1, x2
x1
x2
- a - - b –
Vom observa că în final se obţin aceleaşi variaţii periodice, adică acelaşi ciclu limită.
Fig. 254. Ciclul limită al sistemului din Fig. 248 evidenţiate prin intermediul variabilelor de stare.
Fig. 253. Ciclul limită al sistemului din Fig. 246 pus în evidență prin metoda integrării în timp invers.
Prof. dr. ing. Toma L. Dragomir, TEORIA SISTEMELOR II - 2014/2015 281
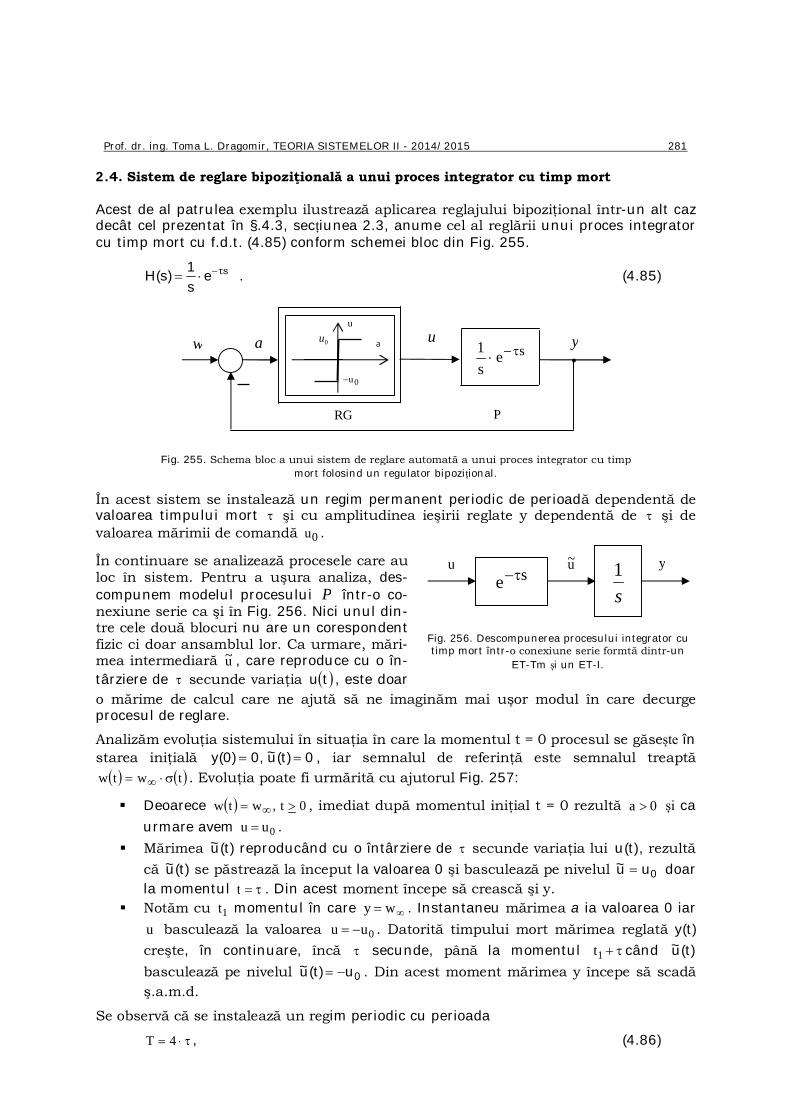
2.4. Sistem de reglare bipoziţională a unui proces integrator cu timp mort Acest de al patrulea exemplu ilustrează aplicarea reglajului bipoziţional într-un alt caz decât cel prezentat în §.4.3, secțiunea 2.3, anume cel al reglării unui proces integrator cu timp mort cu f.d.t. (4.85) conform schemei bloc din Fig. 255.
τses1H(s) . (4.85)
În acest sistem se instalează un regim permanent periodic de perioadă dependentă de valoarea timpului mort şi cu amplitudinea ieşirii reglate y dependentă de şi de valoarea mărimii de comandă 0u .
În continuare se analizează procesele care au loc în sistem. Pentru a uşura analiza, des-compunem modelul procesului P într-o co-nexiune serie ca şi în Fig. 256. Nici unul din-tre cele două blocuri nu are un corespondent fizic ci doar ansamblul lor. Ca urmare, mări-mea intermediară u~ , care reproduce cu o în-târziere de secunde variaţia tu , este doar o mărime de calcul care ne ajută să ne imaginăm mai uşor modul în care decurge procesul de reglare.
Analizăm evoluţia sistemului în situaţia în care la momentul t = 0 procesul se găsește în starea iniţială 0(t)u0,y(0) ~ , iar semnalul de referinţă este semnalul treaptă twtw . Evoluţia poate fi urmărită cu ajutorul Fig. 257:
Deoarece 0twtw , , imediat după momentul iniţial t = 0 rezultă 0a și ca urmare avem 0uu .
Mărimea (t)u~ reproducând cu o întârziere de secunde variaţia lui u(t), rezultă că (t)u~ se păstrează la început la valoarea 0 şi basculează pe nivelul 0uu ~ doar la momentul t . Din acest moment începe să crească şi y.
Notăm cu 1t momentul în care wy . Instantaneu mărimea a ia valoarea 0 iar u basculează la valoarea 0uu . Datorită timpului mort mărimea reglată y(t) creşte, în continuare, încă secunde, până la momentul 1t când (t)u~ basculează pe nivelul 0u(t)u ~ . Din acest moment mărimea y începe să scadă ş.a.m.d.
Se observă că se instalează un regim periodic cu perioada
4T , (4.86)
y u~ u se
s1
Fig. 256. Descompunerea procesului integrator cu timp mort într-o conexiune serie formtă dintr-un
ET-Tm și un ET-I.
Fig. 255. Schema bloc a unui sistem de reglare automată a unui proces integrator cu timp mort folosind un regulator bipozițional.
y u a w
P
u
0u
0u
a se
s1
RG
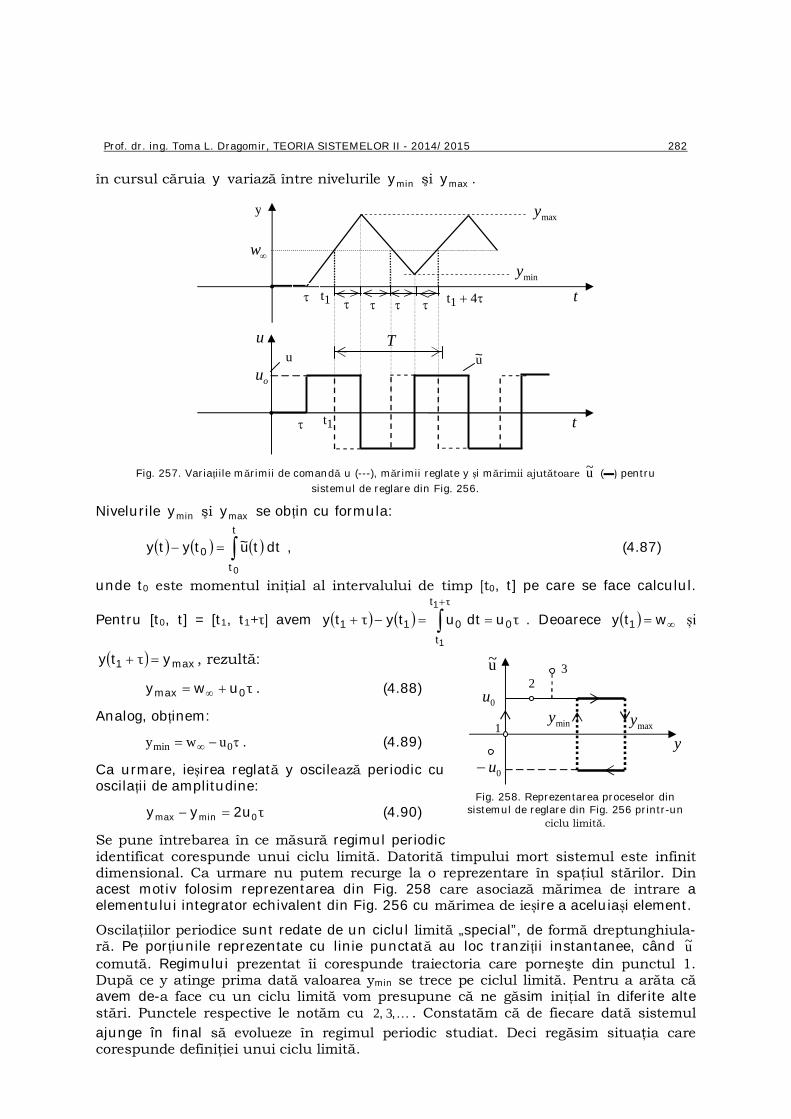
Prof. dr. ing. Toma L. Dragomir, TEORIA SISTEMELOR II - 2014/2015 282
în cursul căruia y variază între nivelurile miny şi maxy .
Nivelurile miny şi maxy se obțin cu formula:
dttutytyt
t0
0
~ , (4.87)
unde t0 este momentul iniţial al intervalului de timp [t0, t] pe care se face calculul.
Pentru [t0, t] = [t1, t1+τ] avem
τt
t0011
1
1
τudtutyτty . Deoarece wty 1 și
max1 yτty , rezultă:
τuwy 0max . (4.88)
Analog, obținem:
0min uwy . (4.89)
Ca urmare, ieșirea reglată y oscilează periodic cu oscilații de amplitudine:
τ2uyy 0minmax (4.90)
Se pune întrebarea în ce măsură regimul periodic identificat corespunde unui ciclu limită. Datorită timpului mort sistemul este infinit dimensional. Ca urmare nu putem recurge la o reprezentare în spaţiul stărilor. Din acest motiv folosim reprezentarea din Fig. 258 care asociază mărimea de intrare a elementului integrator echivalent din Fig. 256 cu mărimea de ieșire a aceluiași element.
Oscilaţiilor periodice sunt redate de un ciclul limită „special”, de formă dreptunghiula-ră. Pe porțiunile reprezentate cu linie punctată au loc tranziții instantanee, când u~ comută. Regimului prezentat îi corespunde traiectoria care porneşte din punctul 1. După ce y atinge prima dată valoarea ymin se trece pe ciclul limită. Pentru a arăta că avem de-a face cu un ciclu limită vom presupune că ne găsim iniţial în diferite alte stări. Punctele respective le notăm cu ,, 32 . Constatăm că de fiecare dată sistemul ajunge în final să evolueze în regimul periodic studiat. Deci regăsim situaţia care corespunde definiţiei unui ciclu limită.
Fig. 257. Variațiile mărimii de comandă u (---), mărimii reglate y și mărimii ajutătoare u~ (▬) pentru sistemul de reglare din Fig. 256.
u u~
1t
u
y
ou
w
t
t
T
1t
miny
maxy
4t1
maxy miny
3 2
1
0u
u~
y
0u Fig. 258. Reprezentarea proceselor din
sistemul de reglare din Fig. 256 printr-un ciclu limită.

Prof. dr. ing. Toma L. Dragomir, TEORIA SISTEMELOR II - 2014/2015 283
3. Teoreme referitoare la puncte de echilibru şi cicluri limită 3) În continuare se enunţă 3 teoreme care se referă la sisteme de ordinul II de forma:
20022122
10012111
x)(txx,xfxx)(txx,xfx
,,
(4.91)
în care au loc procese redate prin portrete de stare în care apar puncte singulare şi /sau cicluri limită.
Teorema indecșilor a lui Poincare Dacă sistemul (4.91) are un ciclu limită şi puncte de echilibru, atunci este valabilă relaţia
1 SN , (4.92)
în care N este suma numărului de noduri, focare şi centre, iar S este numărul punctelor şa.
Teorema Poincare – Bendixon Pentru orice traiectorie de stare a sistemului (4.91) care se înscrie într-o zonă finită a planului stărilor sunt posibile 3 tipuri de evoluţii:
i) traiectorii care evoluează spre un punct de echilibru,
ii) traiectoria care evoluează spre un ciclu limită,
iii) traiectorii care sunt tocmai un ciclu limită.
Teorema de inexistență a ciclurilor limită a lui Bendixon
Pentru sistemul (4.91) nu pot exista cicluri limită într-un domeniu al planului
stărilor în care divergenţa lui
),x(xf),x(xf
f212
211 , adică cantitatea 2
2
1
1
xf
xffdiv
, nu
tinde către 0 şi nu îşi schimbă semnul.
Ca exemplu de aplicare a ultimei teoremei considerăm sistemul
22112
22121
xxxxxxxx
. În
acest caz avem 21
222
211
2
2212
1xx)xxx(
x)xx(x
xfdiv
. Observăm că
expresia nu poate să schimbe semnul. Rezultă că nu există ciclu limită.
Rezultatul se poate uşor generaliza pentru sistemul
221
212
221
221
xxβxhxxxαxgx
, pentru
care 21
222
2 xβxαfdiv .
3) În afara teoremelor prezentate mai jos și a metodei balansului armonic, prezentate în paragraful următor se utilizează ca metode de studiu a ciclurilor limita metoda transformarilor curbelor caracteristice; metoda Lienard și metoda parametrului mic pentru miscarea libera a sistemelor autonome.