curs cuadrice
13
Cuadrice Ecuaţiile canonice ale cuadricelor Sfera Definiţie Sfera este locul geometric al punctelor din spaţiu care sunt egal depărtate de un punct fix numit centru. Fie C(x 0 , y 0 , z 0 ) centrul sferei şi M(x, y, z) un punct oarecare situat pe sferă. Conform definiţiei, are loc egalitatea dist(M, C) = r, sau Prin ridicare la pătrat, obţinem Ecuaţiile parametrice ale unei sfere , u ∈ [0, 2π), v ∈ [0, π]. ⎩ Elipsoidul Definiţie Se numeşte elipsoid suprafaţa care într-un reper ortonormat convenabil ales (O, {i, j, k}) are ecuaţia , a, b, c > 0. Reprezentarea grafică a unui elipsoid este dată în figură Propoziţie Elipsoidul are trei plane de simetrie, xOy, yOz, zOx, trei axe de simetrie, Ox, Oy, Oz, un centru de
-
Upload
marian-badescu -
Category
Documents
-
view
124 -
download
0
description
curs cuadrice algebra an 1 facultate
Transcript of curs cuadrice

Cuadrice
Ecuaţiile canonice ale cuadricelor
SferaDefiniţie Sfera este locul geometric al punctelor din spaţiu care sunt egal depărtate de un punct fix numit centru.
Fie C(x0, y0, z0) centrul sferei şi M(x, y, z) un punct oarecare situat pe sferă. Conform definiţiei, are loc egalitatea dist(M, C) = r, sau
Prin ridicare la pătrat, obţinem
Ecuaţiile parametrice ale unei sfere
, u ∈ [0, 2π), v ∈ [0, π].
⎩Elipsoidul
Definiţie Se numeşte elipsoid suprafaţa care într-un reper ortonormat convenabil ales (O, {i, j, k}) are ecuaţia
, a, b, c > 0.
Reprezentarea grafică a unui elipsoid este dată în figură
Propoziţie Elipsoidul are trei plane de simetrie, xOy, yOz, zOx, trei axe de simetrie, Ox, Oy, Oz, un centru de simetrie, O(0, 0, 0) şi şase vârfuri,A(a, 0, 0), A'(−a, 0, 0), B(0, b, 0), B'(0, −b, 0), C(0, 0, c), C'(0, 0, −c).Propoziţie Elipsoidul intersectează planele de simetrie xOy, yOz, zOx după elipse reale.Propoziţie Ecuaţiile parametrice ale elipsoidului sunt
,u ∈ [0, 2π), v ∈ [0, π].

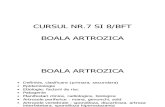
Hiperboloidul cu o pânzăDefiniţie Se numeşte hiperboloid cu o pânză suprafaţa care într-un reper ortonormat convenabil ales (O, {i, j, k}) are ecuaţia
, a, b, c > 0.
Reprezentarea grafică a unei hiperboloid cu o pânză este dată în figură
Propoziţie Hiperboloidul cu o pânză are trei plane de simetrie, xOy, yOz, zOx, trei axe de simetrie, Ox, Oy, Oz, un centru de simetrie, O(0, 0, 0)şi patru vârfuri, A(a, 0, 0), A'(−a, 0, 0), B(0, b, 0), B' (0, −b, 0).Propoziţie Planele de simetrie xOy, yOz, zOx intersectează hiperboloidul cu o pânză după o elipsă reală şi două hiperbole.Propoziţie Ecuaţiile parametrice ale hiperboloidului cu o pânză sunt
, u ∈ [0, 2π), v ∈ R
-6-4
-2 0
2 4
6 -4-3
-2-1
0 1
2 3
4
-2-1.5
-1-0.5
0 0.5
1 1.5
2
load(draw)draw3d(xu_grid=50,yv_grid=50,color="blue",parametric_surface(4*cosh(v)*cos(u), 3*cosh(v)*sin(u), 2*sinh(v), u,0,2*%pi,v,-5,5));
Hiperboloidul cu două pânze

Definiţie Se numeşte hiperboloid cu două pânze suprafaţa care într-un reper ortonormat convenabil ales (O, {i, j, k}) are ecuaţia
, a, b, c > 0.
Reprezentarea grafică a unui hiperboloid cu două pânze este dată în figură
Propoziţie Hiperboloidul cu două pânze are trei plane de simetrie, xOy, yOz, zOx, trei axe de simetrie, Ox, Oy, Oz, un centru de simetrie, O(0, 0, 0) şi două vârfuri, C(0, 0, c), C'(0, 0, -c).Propoziţie Planele de simetrie yOz, zOx intersectează hiperboloidul cu două pânze după două hiperbole, iar planul xOy nu intersectează suprafaţa.Propoziţie Ecuaţiile parametrice ale hiperboloidului cu două pânze sunt
, u ∈ [0, 2π), v ∈ R
-40 -30 -20 -10 0 10 20 30 40 -30-20
-10 0
10 20
30-20-15-10-5 0 5
10 15 20
load(draw)draw3d(xu_grid=50,yv_grid=50,color="blue", parametric_surface(4*sinh(v)*cos(u), 3*sinh(v)*sin(u),2*cosh(v),u,0,2*%pi,v,-3,3),parametric_surface(4*sinh(v)*cos(u),3*sinh(v)*sin(u), -2*cosh(v),u,0,2*%pi,v, -3,3));
Paraboloidul eliptic

Definiţie Se numeşte paraboloid eliptic suprafaţa care într-un reper ortonormat convenabil ales (O, {i, j, k}) are ecuaţia
, a, b > 0.
Reprezentarea grafică a paraboloidului eliptic este dată în figură
Propoziţie Paraboloidului eliptic are două plane de simetrie, yOz, zOx, o axă de simetrie, Oz, şi un vârf, originea axelor O(0, 0, 0).Propoziţie Planele de simetrie yOz, zOx intersectează paraboloidului eliptic după două parabole. Propoziţie Ecuaţiile parametrice paraboloidului eliptic sunt
, u ∈ [0, 2π), v ∈ R
Paraboloidul hiperbolicDefiniţie Se numeşte paraboloid hiperbolic suprafaţa care într-un reper ortonormat convenabil ales (O, {i, j, k}) are ecuaţia
, a, b > 0.
Reprezentarea grafică a paraboloidului hiperbolic este dată în figură
Propoziţie Paraboloidul hiperbolic are două plane de simetrie, yOz, zOx, o axă de simetrie, Oz, şi un vârf, originea axelor O(0, 0, 0).

Propoziţie Planele de simetrie yOz, zOx intersectează paraboloidului hiperbolic după două parabole. Planul xOy nu este plan de simetrie pentru paraboloidul hiperbolic.
Intersecţia paraboloidului cu acest plan este dată de sistemul ,
Propoziţie Ecuaţiile parametrice paraboloidului hiperbolic sunt
, u, v ∈ R
-3 -2 -1 0 1 2 3-3-2-1 0 1 2 3
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
1
-6-4-2 0 2 4 6 -6-4-2 0 2 4 6
-30-20-10
0 10 20 30
x^2-y^2
-30-20-10 0 10 20 30
Alte forme canonice
Definiţie Se numeşte con cu vârful în origine suprafaţa care într-un reper ortonormat convenabil ales (O, {i, j, k}) are ecuaţia

Definiţie Se numesc cilindrii suprafeţele care într-un reper ortonormat convenabil ales (O, {i, j, k}) au ecuaţiile date mai jos:
Cilndrul eliptic: , x, y, z ∈ R.
Cilindrul hiperbolic: , x, y, z ∈ R.
Cilindrul parabolic: y2 = 2px,
Generarea suprafeţelor
Generarea suprafeţelor conice
Definiţie Se numeşte suprafaţă conică suprafaţa generată de o dreaptă variabilă, numită generatoare, care trece printr-un punct fix, numit vârf, şi se sprijină pe o curbă fixă numită curbă directoare.
Fie vârful suprafeţei conice. Curba directoare (C) o considerăm dată sub forma intersecţiei a două suprafeţe
(C): Prin punctul ducem o dreaptă oarecare
Deoarece vectorul director al dreptei, , este nenul, cel puţin unul dintre parametrii directori este diferit de zero. Fie . Atunci ecuaţiile dreptei se pot scrie sub forma
unde s-a notat şi

Pentru ca dreptele (dλ,μ) să fie generatoarele suprafeţei conice, ele trebuie să se sprijine pe curba directoare (C). Din punct de vedere analitic, aceasta înseamnă că sistemul de patru ecuaţii cu trei necunoscute, formatdin ecuaţiile dreptelor (dλ,μ) şi ecuaţiile curbei (C), adică
trebuie să fie un sistem compatibil.Fie Φ(λ, μ) = 0 condiţia de compatibilitate a sistemului anterior, obţinută prin eliminarea celor trei necunoscute x, y, z între cele patru ecuaţii ale sistemului. Ecuaţia suprafeţei conice se obţine eliminând parametrii λ şi μ între ecuaţiile dreptei şi condiţia de compatibilitate. Din ecuaţiile dreptei (dλ,μ) rezultă
care introduse în condiţia de compatibilitate Φ(λ, μ) = 0 conduc la ecuaţia suprafeţei conice
Φ( , )=0
Exemplu Să se scrie ecuaţia conului care are vârful în originea sistemului de axe şi curba directoare cercul
.Ecuaţiile unei drepte oarecare care trece prin origine sunt
(dλ,μ) :
Generatoarele (dλ,μ) se sprijină pe curba (C) dacă sistemul format din ecuaţiile dreptei şi ecuaţiile curbei
este compatibil. Pentru a obţine relaţia de compatibilitate se elimină necunoscutele x, y, z între cele patru ecuaţii ale sistemului. Pentru z = 4 ecuaţia a doua devine x2 + y2 − 8 = 0, iar din ecuaţiile dreptei rezultă x = 4λ, y = 4μ. Introducând valorile lui x şi y în ecuaţia x2 + y2 − 8 = 0 seobţine 16λ2 + 16μ2 − 8 = 0, sauΦ(λ, μ) = 2λ2 + 2μ2 − 1 = 0.Această relaţie între λ şi μ este condiţia de compatibilitate a sistemului. Pentru a obţine ecuaţia conului se introduc valorile parametrilor λ şi μ
scoase din ecuaţiile dreptei, în condiţia de compatibilitate.
Rezultă
Ecuaţia canonică a conului este

Generarea suprafeţelor cilindrice
Definiţie Se numeşte suprafaţă cilindrică o suprafaţă generată de o dreaptă variabilă care se deplasează rămânând paralelă cu o direcţie fixă şi se sprijină pe o curbă fixă, numită curbă directoare.
Fie vectorul director al direcţiei fixe şi(C):
ecuaţiile curbei directoare. Pentru o scrie ecuaţiile unei drepte variabile de direcţie scriem mai întâi ecuaţiile dreptei care trece prin origine şi are ca vector director vectorul
:
Aducem apoi această ecuaţie la forma generală
O dreaptă paralelă cu această dreaptă este de forma(dλ,μ) :
Pentru ca dreptele (dλ,μ) să se sprijine pe curba (C) trebuie ca sistemul formatdin ecuaţiile dreptei şi ecuaţiile curbei
să fie compatibil. Eliminând pe x, y, z între cele patru ecuaţii ale sistemului se obţine o relaţie între parametrii λ şi μ necesară pentru ca sistemul să fie compatibil. Notăm acestă această condiţie de compatibilitate sub forma
Φ(λ, μ) = 0.Ecuaţia suprafeţei cilindrice se obţine introducând în condiţia de compatibilitate valorile lui λ şi μ obţinute din ecuaţiile dreptei. Prin urmare, ecuaţiasuprafeţei cilindrice are ecuaţia Φ(nx − lz, ny − mz) = 0.
Exemplu Să se determine ecuaţia suprafeţei cilindrice care are drept curbă directoare cercul
şi generatoarele paralele cu drepta
Vectorul director al dreptei date este . Dreapta care trece prin origine şi
este paralelă cu dreapta dată, deci are pe ca vector director, are ecuaţiile

sau O dreaptă oarecare, paralelă cu această dreaptă, este de forma(dλ,μ) : Pentru ca dreptele (dλ,μ) să se sprijine pe curba (C) trebuie ca sistemul formatdin ecuaţiile dreptei şi ecuaţiile curbei
să fie compatibil. Ţinând seama că z = 0, din prima şi din a doua ecuaţie
rezultă
Aceste valori introduse în a treia ecuaţie conduc la obţinerea relaţiei de compatibilitateΦ(λ, μ) = λ2 + μ2 − 225 = 0. Pentru a obţine ecuaţia suprafeţei cilindrice se introduc valorile parametrilorλ şi μ, date de ecuaţiile dreptei, în condiţia de compatibilitate. Rezultă astfel ecuaţia căutată (3x + 2z)2 + (3y − z)2 − 225 = 0,
Generarea suprafeţelor de rotaţie
Definiţie Se numeşte suprafaţă de rotaţie o suprafaţă generată de o curbă (C) care se roteşte fără alunecare în jurul unei axe fixe (d).
Curba (C) se numeşte curbă generatoare, iar axa (d) se numeşte axa de rotaţie. În timpul rotaţiei un punct P (x, y, z) al curbei (C) descrie un cerc cu centrul pe axa de rotaţie (d) şi situat într-un plan perpendicular pe axă.Din felul în care a fost definită suprafaţa de rotaţie rezultă că ea poate fi generată de un cerc variabil (Γ) care are centrul pe axa de rotaţie (d), este situat într-un plan perpendicular pe axă şi se sprijină pe curba (C). Un astfel de cerc generator se numeşte paralel.Teoremă Fie dată dreapta (d) de ecuaţie
şi curba (C) care are ecuaţiile(C):
Atunci ecuaţia suprafeţei de rotaţie obţinută prin rotirea curbei (C) în

jurul dreptei (d) este Exemplu Să se afle ecuaţia suprafeţei de rotaţie obţinută prin rotirea dreptei
(d) : în jurul axei Oz.Ecuaţiile unui cerc cu centrul pe axa Oz şi perpendicular Oz sunt(Γλ,μ) : Acest cerc se sprijină pe dreapta (d) dacă sistemul
este compatibil. Ţinând seama că , prima ecuaţie
devine
ceea ce constituie condiţia de compatibilitate a sistemului.Ecuaţia suprafeţei de rotaţie se obţine eliminând parametrii λ, μ întreecuaţiile cercurilor Γλ,μ şi condiţia de compatibilitate. Avem
de unde se obţine ecuaţia
care reprezintă un hiperboloid de rotaţie cu o pânză.