





Limbile
Pagini
Legal

90 M. Morega, MAINI ELECTRICE
3.3 Maina sincron trifazat
3.3.1 Elemente constructive specifice. Domeniu de utilizare. Principiul de funcionare n regim de generator i motor
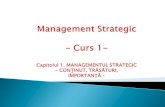
Maina sincron poate funciona att n regim de generator (n centralele electrice, pentru producerea energiei electrice sunt utilizate turbo i hidrogeneratoare sincrone trifazate), ct i n regim de motor (n acionarea sarcinilor de mare putere, la turaie constant). Prile constructive principale ale mainii sincrone sunt: statorul (fix n raport cu platforma pe care este poziionat maina) i rotorul (n interiorul statorului aflat n micare de rotaie i concentric cu acesta). La construcia normal, statorul are rol de indus, realizarea lui fiind asemntoare cu cea a mainii asincrone (carcas, miez feromagnetic lamelat, cu crestturi uniforme pe circumferina interioar, nfurare polifazat simetric, uzual trifazat). Rotorul are rolul de inductor. Construcia lui este heteropolar i este echipat cu o nfurare de excitaie alimentat n curent continuu. Alimentarea nfurrii poate fi fcut prin inele fixate pe arbore, la care sunt conectate capetele acesteia i pe care calc perii colectoare fixate n carcas, conectate la cutia de borne, sau prin intermediul unei puni redresoare solidare cu rotorul i alimentat de la un generator de curent alternativ, tot printr-un sistem de inele i perii. Exist dou variante constructive de rotor: cu poli apareni (se practic pentru rotoare cu p = 2) i cu poli necai (varianta tipic pentru p = 1 i mai rar p = 2), reprezentate n figura 3.31.
cu poli apareni cu poli necai
Fig. 3.31 Tipuri de rotoare pentru maina sincron Miezul rotoric cu poli necai se realizeaz dintr-un bloc masiv, cilindric din oel n care se frezeaz crestturi (n lungul generatoarelor cilindrului), n crestaturi se dispune nfurarea de excitaie. Construcia cu poli necai se folosete la turbogeneratoare la care turaia n1 = 3000 rot/min (pentru frecvena de 50 Hz).
Miezul rotoric cu poli apareni este realizat prin montarea unor piese polare masive pe jugul rotoric, prinderea fcndu-se prin buloane sau pene; este necesar o consolidare mecanic bun, deoarece n timpul funcionrii polii sunt supui aciunii forelor centrifuge. Polii susin nfurarea de excitaie. Construcia cu poli apareni se utilizeaz la motoare sincrone i hidrogeneratoare la care turaia este mic n1 25 rot/sec.(sau 1500 rot/min), la funcionarea n reele de 50 Hz. Principiul de funcionare al mainii sincrone n regim de generator presupune antrenarea rotorului la o turaie n1 i existena curentului continuu n nfurarea de excitaie;
S
N
N
S
S
N
Capitolul 3 Maini de curent alternativ 91
efectul const n producerea unui cmp magnetic constant n timp, repartizat n spaiu dup alternana polilor, sub forma unor pulsuri pozitive i negative, care se rotete cu aceeai turaie cu rotorul, devenind astfel un cmp nvrtitor, cu turaia n1 (cum este prezentat in finalul paragrafului 3.1.2 i fig. 3.6). Indusul (armatura statorica) este parcurs de fluxul magnetic variabil n timp i n nfurarea polifazat (trifazat) statoric se induc tensiuni electromotoare, avnd frecvena f1 = pn1. Dac nfurarea se nchide pe un circuit de sarcin, n nfurri se stabilesc cureni avnd tot frecvena f1. Sistemul trifazat, simetric, echilibrat de cureni produce un cmp de reacie, tot nvrtitor i sincron cu cel inductor. Prin compunerea celor dou cmpuri nvrtitoare ia natere cuplul electromagnetic al generatorului sincron, care se opune cuplului de antrenare a rotorului. Pentru funcionarea n regim de motor este necesar alimentarea nfurrii statorice cu un sistem de tensiuni trifazat, simetric, echilibrat, de frecvena f1, astfel nct curenii care parcurg fazele s produc un cmp magnetic nvrtitor cu turaia n1 = f1 / p. Este de asemenea necesar ca rotorul (cu nfurarea de excitaie parcurs de c.c.) s se nvrt la aceeai turaie n1. Cuplul electromagnetic care se formeaz menine sincronismul dintre cmpul nvrtitor statoric i cel rotoric (respectiv rotor) i permite transferul de putere activ mecanismului acionat. De remarcat c principiul de funcionare al motorului sincron este condiionat de sincronismul dintre turaia rotorului i a cmpului, astfel c motorul sincron nu poate funciona dect la turaia de sincronism (constant ct timp f1 = const.) i nu dezvolt cuplu la pornire, deci trebuie pornit indirect, pn la turaia de sincronism. Tot din acest motiv, maina sincron nu poate funciona n regimul de frn.
3.3.2 Regimurile staionare de generator i motor ale mainii sincrone. Ecuaii, scheme echivalente, diagrame de fazori
Pentru simplificarea teoriei se va considera pentru nceput o main sincron trifazat, de construcie simetric i cu poli necai (ntrefier constant, deci circuit magnetic izotrop). Se consider materialul magnetic liniar. Teoria urmeaz s se stabileasc pentru o faz de referin (faza reprezentativ) a nfurrii statorice. Dup cum s-a artat n 3.3.1, n maina sincron, n timpul funcionrii ca generator n sarcin, sunt prezente dou cmpuri magnetice nvrtitoare: cmpul magnetic inductor (produs de nfurarea de excitaie) i cmpul magnetic de reacie (produs de curenii statorici). Se neglijeaz coninutul n armonici al acestor cmpuri, aa cum s-a considerat i n 3.1, ct i armonicile din curbele t.e.m. induse n nfurri i ale curenilor. Ipoteza considerrii regimului sinusoidal simplific teoria, fr a neglija fenomenele importante din timpul funcionrii. Se folosete reprezentarea mrimilor sinusoidale n complex simplificat (v. Anexa II). n nfurarea de referin statoric se induc att t.e.m. datorate cmpului magnetic inductor, ct i cmpului magnetic de reacie. Cmpul magnetic inductor este produs de solenaia exexex Iw= a nfurrii de excitaie, unde wex este numrul de spire al nfurrii de excitaie, parcurs de curentul continuu Iex. Prin compunerea t.e.m. induse de cmpul magnetic inductor pe toate elementele de nfurare rezult tensiunea E0. Similar, rezult t.e.m. indus datorit cmpului de reacie (v. 3.1.5) al solenaiei nfurrii statorice Er. La mersul n gol, cnd curentul prin fazele nfurrii statorice este nul (nu exist cmp de reacie), t.e.m. indus i msurabil la bornele nfurrii este E0. Cnd curentul prin faza de referin este maxim, atunci cmpul magnetic de reacie are axa coincident cu axa nfurrii i se poate defini o inductivitate de reacie a indusului,
numit inductivitate ciclic:
L = wkwri
, unde r este fluxul magnetic de reacie, iar i este
92 M. Morega, MAINI ELECTRICE
curentul prin faza de referin. Valorile sunt instantanee, deoarece la o deplasare a cmpului de reacie r i i nu mai au valori maxime. Se poate exprima t.e.m. indus datorit cmpului de reacie, utiliznd imaginile n complex ale mrimilor armonice
Er = wkwdrd t
= j1LI = jXI. (3.52)
S-a considerat r drept fluxul magnetic de reacie util n main. Curentul i prin spirele fazei de referin produce ns i un cmp magnetic de dispersie , care conduce i el la apariia unei t.e.m. de autoinducie n spirele fazei de referin
E = wkwdd t
= j1L I = jX I. (3.53)
i la definirea inductivitii de dispersie L, a fazei de referin. innd seama i de rezistena electric a conductorului din care este realizat nfurarea, deci de cderea de tensiune rezistiv, se poate aplica teorema a II-a a lui Kirchhoff pe conturul nfurrii i se poate exprima tensiunea la borne n legtur i cu schema echivalent (figura 3.32a)
IRIXIXEIREEEU r =++= jj00 (3.54) Ecuaia (3.54) corespunde diagramei de fazori din figura 3.32b.
a.
b. Fig. 3.32 Schema echivalent (a) i diagrama de fazori (b) a unei nfurri de referin
a mainii sincrone (n regim de generator) n diagrama de fazori s-au pus n eviden dou unghiuri: defazajul dintre curentul i tensiunea de la bornele nfurrii, care este impus de caracterul impedanei de sarcin Zs conectat la bornele AX ale nfurrii de referin i defazajul dintre t.e.m. indus de cmpul inductor E0 i tensiunea la borne U (respectiv ntre cmpul magnetic inductor i cmpul magnetic rezultant datorit suprapunerii peste cmpul inductor a cmpului de reacie). Acesta poart numele de unghi intern i este un parametru important n teoria mainii sincrone, caracteriznd ncrcarea acesteia n sarcin. Reprezentarea schemei echivalente i a diagramei fazoriale se poate simplifica (figura 3.33) definind o reactan echivalent a mainii: reactana sincron += XXX s .
U
R
Zs
A
X
X X
E0
I
RI
jX jXI
I
U
E0
Capitolul 3 Maini de curent alternativ 93
a.
b. Fig. 3.33 Reprezentarea simplificat a schemei echivalente (a) i a diagramei fazoriale (b)
n cazul motorului sincron se pot deduce n mod similar ecuaia corespunztoare de tensiuni (3.55), schema echivalent i diagrama de fazori (fig. 3.34). Fa de cazul generatorului se remarc urmtoarele: inversarea sensului de referin al curentului, asociat cu cel al tensiunii la borne dup regula de la receptoare i unghiul intern, care are semn opus fa de cazul generatorului.
IRIXEU s ++= j0 . (3.55)
a.
b. Fig. 3.34 Schema echivalent simplificat i diagrama de fazori la motorul sincron
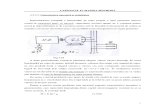
De multe ori, n aplicaii, se neglijeaz cderea de tensiune pe rezistena nfurrii de faz n raport cu cea corespunztoare reactanei sincrone (respectiv R 0). Multe construcii reale de maini sincrone nu satisfac ipoteza referitoare la izotropia circuitului magnetic; astfel, sunt mainile cu reluctan variabil i mainile cu poli apareni. Teoria acestora se stabilete considernd construcia mainii proiectat pe dou axe dup direcii radiale (n raport cu geometria cilindric a mainii) i ortogonale ntre ele (din punct de vedere electromagnetic, adic defazate cu unghiul electric pg = /2), numite: axa longitudinal (d) (coincide cu axa polilor, adic trece prin zona de reluctan magnetic minim a circuitului magnetic) i axa transversal (q) (coincide cu axa neutr a polilor, adic trece prin zona de reluctan magnetic maxim a circuitului magnetic), ca n figura 3.35. Din cauza variaiei reluctanei magnetice a circuitului mainii n cele dou axe considerate, reactana sincron a fazei de referin are dou componente: reactana sincron longitudinal (Xd) i reactana sincron transversal (Xq). De asemenea, curentul prin nfurarea fazei de referin a indusului are o component longitudinal (Id) i una transversal (Iq). Solenaia de excitaie fiind plasat pe poli (axa bobinei de excitaie coincide
U
R A
X
Xs
E0
I jXsI
RI
I
U
E0
U
R A
X
Xs
E0
I
94 M. Morega, MAINI ELECTRICE
cu axa d), are component numai dup direcia longitudinal ca i fluxul inductor produs de ea, iar t.e.m. indus de cmpul magnetic inductor E0, ca derivat a fluxului inductor, are componenet numai pe axa q.
Fig. 3.35 Maina sincron anizotrop (cu polii apareni)
Cu aceste sumare explicaii, ecuaia simplificat de tensiuni a generatorului sincron cu poli apareni are forma (3.56), iar schema echivalent i diagrama de fazori sunt reprezentate n figura 3.36, prin raportare la cele dou axe (d, q) i cu considerarea R 0.
qqdd IXIXEU jj0 = (3.56)
Fig. 3.36. Schema echivalent i diagrama de fazori a generatorului sincron cu poli apareni Pentru motorul sincron cu poli apareni se deduc n mod similar: ecuaia de tensiuni, schema echivalent i diagrama de fazori inversnd polaritatea curentului I. n continuare se va trata cazul mai simplu al mainii cu poli necai, fcndu-se referire la maina cu polii apareni doar n cazul aplicaiilor specifice. Observatie. In teoria mainii expus n acest paragraf, mrimile U i I sunt mrimi de faz i corespund fazei reprezentative a nfurrii statorice.
(d)
(q)
pg=/2 g=/4
Ucos
A
X
Xd
E0
Id
Usin
A
X
Xq Iq
jXdId
I
U
E0 jXqIq
Iq
Id
Capitolul 3 Maini de curent alternativ 95
3.3.3 Puterea i cuplul electromagnetic produse n maina sincron.
Caracteristica mecanic. Stabilitatea n funcionare Revenind la diagrama de fazori simplificat a generatorului sincron cu polii necai (fig. 3.33) cu neglijarea rezistenei nfurrii de faz statoric ( 0R ) reluat n figura 3.37, se poate deduce, prin relaii geometrice, ecuaia
,sin)cos( =+ UIX s (3.57) care permite exprimarea puterii electromagnetice corespunztoare fazei reprezentative; componenta activ a puterii electromagnetice este patea real a puterii electromagnetice totale (aparente)
Pe = Re{Se} = E0Icos( + ) (3.58) sub forma
.sin0 =s
e XUE
P (3.59)
Fig. 3.37 Diagrama fazorial simplificat a generatorului sincron cu poli necai
(constructia grafica implica segmentele pq
perpendicular pe op si mn perpendicular pe oq, astfel ca unghiurile nmq si poq sunt egale, iar relatia (3.57) rezulta prin exprimarea segmentului mn ca latura a celor doua triunghiuri
nmq, respectiv omn)
La o main trifazat, la producerea puterii contribuie toate cele trei faze
.sin3 0 =
se X
UEP (3.60)
Cuplul electromagnetic are expresia dedus pornind de la relaia sa de definiie:
M = Pe1
=Pe2n1
=3pE0U2f1Xs
sin, (3.61)
unde 1 este viteza unghiular de rotaie a cmpului inductor (respectiv a rotorului), p este numrul de perechi de poli ai mainii, iar f1 este frecvena curenilor prin nfurarea statoric. Expresiile (3.60) i (3.61) pun n eviden dependena sinusoidal dintre puterea electromagnetic, respectiv cuplul electromagnetic i unghiul intern. Caracteristica mecanic a mainii sincrone este reprezentat uzual ca dependena dintre cuplul electromagnetic i unghiul intern, avnd forma din figura 3.38. pentru cele dou regimuri: regimul de generator,
96 M. Morega, MAINI ELECTRICE
corespunztor la > 0, M > 0, Pe > 0 cnd maina debiteaz putere activ i regimul de motor, pentru < 0, M < 0, Pe < 0 cnd maina absoarbe putere activ.
Unghiul intern este parametrul care reflect ncrcarea n sarcin a mainii sincrone. Funcionarea stabil a mainii (n sensul stabilitii statice, 1.5) corespunde zonei de caracteristic pentru /2 < < /2. La variaii brute ale cuplului de sarcin ns, zona de stabilitate este mai restrns, deoarece variaiile de cuplu de sarcin implic variaii de turaie i exist pericolul ca maina s nu mai poat reveni la sincronism i deci s nu mai poat produce cuplu electromagnetic.
Fig. 3.38 Caracteristica mecanic a
mainii sincrone cu poli necai
Observaii. 1. Din ecuaia cuplului electromagnetic se observ c, la o scdere accidental a tensiunii la borne este posibil meninerea cuplului constant prin "forarea excitaiei" (creterea solenaiei de excitaie produce creterea fluxului magnetic inductor i implicit a t.e.m. induse prin variaia acestuia). 2. Pentru maina sincron trifazat cu polii apareni se pot deduce n mod similar expresiile puterii electromagnetice (3.62) i cuplului electromagnetic (3.63), pornind de la diagrama de fazori simplificat din figura 3.36:
,2sin1123sin
3 20
+=
dqde XX
UXUE
P
(3.62)
M = 3p2f1
E0UXd
sin + U2
21Xq
1Xd
sin2
.
(3.63)
Caracteristica mecanic a mainii cu poli apareni nu mai red variaia sinusoidal a cuplului cu unghiul intern, ci o "sinusoid deformat", cu valoarea de cuplu maxim la || < /2.
3. Dup cum se observ din ecuaii, maina sincron cu poli apareni poate dezvolta putere electromagnetic i cuplu electromagnetic i n absena t.e.m.induse E0, adic la curent de excitaie nul. Pe aceast proprietate se bazeaz funcionarea aa numitelor maini sincrone reactive (fr nfurare de excitaie).
2
2
M Mmax
-Mmax motor generator
Capitolul 3 Maini de curent alternativ 97
3.3.4 Maina sincron conectat la reea. Schimbul de puteri. Compensatorul sincron Se consider o main sincron trifazat cu polii necai, conectat cu nfurarea statoric la o reea de tensiune alternativ trifazat i simetric, de valoare efectiv constant U i frecvena f (fig. 3.39). Prin variaia cuplului la ax, maina poate fi fcut s funcioneze fie ca motor, aplicndu-i-se un cuplu de sarcin Ms i ea absoarbe din reea putere activ (P < 0), fie ca generator, antrennd axul cu un cuplu activ Ma i ea produce putere electric activ pe care o cedeaz reelei (P > 0). n acest timp, curentul de excitaie Iex i respectiv t.e.m. indus de fluxul inductor E0 au valoare constant. Schimbul de putere activ dintre maina sincron i reea este nsoit de variaia unghiului intern. Aceeai main la funcionarea cu un anumit cuplu la ax, respectiv putere activ constant (indiferent de regimul de motor sau generator), prin variaia curentului de excitaie poate avea un schimb de putere reactiv cu reeaua. Exist o valoare "optim" a curentului de excitaie (Iex*), respectiv a t.e.m. E0, la care schimbul de putere reactiv este nul. La curent de excitaie mai mic, maina este subexcitat i absoarbe din reea putere reactiv (Q < 0), iar la curent de excitaie mai mare, maina este supraexcitat i produce putere reactiv pe care o cedeaz reelei (Q > 0).
Fig. 3.39 Schema electric a
mainii sincrone cuplat la reeaua de tensiune
constant
Aceste regimuri de funcionare corespund unor anumite domenii de variaie a unghiului de defazaj dintre tensiunea reelei U i curentul ce strbate nfurarea statoric de referin I, dup cum arat diagramele de fazori i tabelul din figura 3.40. Se consider c maina sincron este tot timpul conectat cu nfurarea statoric la reeaua trifazat cu tensiunea U. De aceea, n diagramele fazoriale, U este identic n toate cele patru cazuri. Datorit acestei proprieti, maina sincron poate fi utilizat (independent de regimul de lucru ca motor sau generator) i pentru reglarea factorului de putere din reeua la care este conectat, acest regim fiind denumit compensator sincron. Uneori se utilizeaz maina sincron n regim de motor n gol, cu excitaie reglabil, numai pentru aceast funcie de compensare controlat a factorului de putere al reelei (similar cu utilizarea unei baterii de condensatoare). Caracteristicile de funcionare specifice acestui regim de compensator sincron sunt numite caracteristici de reglaj sau "curbe n V" (dup forma lor tipic), definite ca: I = I(Iex), la P = const i U = const. Reprezentarea lor grafic la diferite valori de putere constant, din figura 3.41, arat c variaia curentului I (care circul ntre main i reea) la variaia curentului de excitaie este exclusiv reactiv (componenta activ Icos = const. n ipotezele
U1, f1 3~
R S T W2
A1
A2
A3
W1
V
MS 3~
U V W
n1 M
-M
=
A
Iex
-P P
I
-I
98 M. Morega, MAINI ELECTRICE
menionate). O alt variant de prezentare a caracteristicilor de reglaj este variaia cos = f(Iex), la P = const. i U = const., cu importan pentru regimul de compensator sincron. Curbele n V sunt similare n regimul de motor i n cel de generator, dar n cazul motorului, o scdere prea mare a curentului de excitaie (mai ales la maina cu poli necai, care nu are cuplu electromagnetic reactiv), poate conduce la scderea cuplului electromagnetic sub valoarea cuplului rezistent i la ieirea mainii din sincronism.
generator
supraexcitat generator subexcitat
motor supraexcitat
motor subexcitat
Fig. 3.40. Regimurile de funcionare ale mainii sincrone la reeaua de tensiune constant.
Fig. 3.41 Caracteristicile de reglaj (curbele n V) ale mainii sincrone
0..../2 (3)/2....2 /2.... ....(3)/2 P = 3UIcos debiteaz (P>0) debiteaz (P>0) absoarbe (P0)
subexcitat motor (
Capitolul 3 Maini de curent alternativ 99
3.3.5 Bilanul de puteri active i randamentul mainii sincrone
Indiferent de regimul de funcionare (motor sau generator), pierderile n maina sincron sunt de aceleai categorii (v. Anexa IV):
- pierderile de tip Joule n nfurarea statoric: 23RIPJs = (unde R este rezistena nfurrii de faz, iar I este valoarea efectiv a curentului de faz); - pierderile n fier n armtura statoric: PFe formate din pierderi prin cureni turbionari i prin histerezis;
- pierderile de tip Joule n nfurarea de excitaie: 2exexJex IRP = ;
- pierderile de frecare i ventilaie: Pfv;
- pierderile suplimentare n miez (tlpi polare, dini statorici) datorate armonicilor superioare din curba cmpului rezultant: Ps;
Suma pierderilor este format din categoriile de pierderi din main ( +++= sfvFeJs PPPPP ) exceptnd pierderile n nfurarea de excitaie, care provin din transformarea puterii absorbite separat de acest circuit exexex IUP = ; i dac sunt i acestea considerate n calculul randamentului, intr ca o putere suplimentar consumat (la fel ca i la maina de c.c. cu excitaie independent).
Randamentul se poate exprima n funcie de puterea electric din circuitul statoric (absorbit de motor, respectiv produs de generator)
.;Jex
generatorJex
motor PPPP
PPPP
++=
+
=
(3.64)
Puterea activ P = Re S[ ] absorbit din reea prin circuitul nfurrii statorice se exprim n funcie de factorul de putere n circuit i de valorile tensiunii i curentului ca mrimi de linie, P = 3UI cos , sau de faz,
P = 3U f I f cos .
Observaie. n teoria mainii expus n 3.3.2. mrimile U i I sunt mrimi de faz.
3.3.6 Caracteristicile de funcionare ale generatorului sincron pe reea proprie Funcionarea pe reea proprie caracterizeaz regimul de generator al mainii sincrone pentru un circuit de sarcin independent. Caracteristicile se definesc la turaie constant a rotorului, condiie asigurat de motorul de antrenare i sunt ridicate experimental pe un circuit cu schema prezentat n figura 3.42. Caracteristicile sunt urmtoarele: Caracteristica de mers n gol: U0 = f(Iex) la n = const i I = 0 se ridic lsnd circuitul de sarcin deschis i variind curentul din circuitul de excitaie att n sens cresctor ct i descresctor, n mod monoton. Forma caracteristicii (fig. 3.43a) este influenat de proprietile magnetice ale miezului, reprezentnd la alt scar caracteristica magnetic a
100 M. Morega, MAINI ELECTRICE
mainii, adic dependena dintre fluxul magnetic inductor i solenaia nfurrii de excitaie. Curba ascendent pleac din zero (Ur1 = 0) dac miezul nu prezint magnetizaie remanent; dac maina a mai funcionat, atunci exist o tensiune remanent Ur1 diferit de zero n absena curentului de excitaie.
Fig. 3.42 Schema de montaj pentru funcionarea generatorului sincron pe reea proprie
Caracteristica extern: U = f(I), pentru n = const., Iex = const. i cos = const. caracterizeaz funcionarea n sarcin simetric a generatorului, la flux inductor constant i acelai tip de sarcin. n funcie de caracterul sarcinii cderea de tensiune n main,
IXRU s )j( += , variaz i deci tensiunea la borne scade sau crete fa de valoarea de la mers n gol (fig. 3.43b). Caracteristica de scurtcircuit: I = f(Iex), pentru n = const. i U = 0 (figura 3.43.c) este o caracteristic liniar, care pleac de la o valoare puin diferit de zero datorit existenei tensiunii remanente.
Fig. 3.43. Caracteristicile generatorului sincron la funcionarea pe reea proprie: (a) - caracteristica de mers n gol (b) - caracteristici externe (c) - caracteristica de scurtcircuit
3.3.7 Caracteristicile electromecanice ale motorului sincron. Pornirea i reglajul de turaie
Caracteristica mecanic a motorului sincron n(M) este rigid, turaia constant la variaii ale cuplului de sarcin fiind o condiie a sincronismului motorului. La depirea unei valori limit a cuplului, motorul i pierde stabilitatea, ieind din sincronism; cuplul electromagnetic devine nul, turaia scade pn la oprire liber, iar curentul absorbit din reea
A1
A2
A3
V GS 3~
n=const.
Ma
M
=
A
Iex
U
Zs I
F
(K)
I
U0=E0
U sarcina R C R R - L
Iex
Isc
Iex
U0=E0
Ur2 Ur1
Capitolul 3 Maini de curent alternativ 101
crete, deoarece prin scderea la zero a t.e.m. induse, tensiunea reelei se aplic pe impedana intern a mainii. Caracteristicile electromecanice care se pot studia la funcionarea n sarcin a motorului alimentat la tensiune i frecven nominale, curent de excitaie constant i asigurndu-i ncrcarea n sarcin cu un generator frn care permite msurarea cuplului sau a puterii utile Pu, ntr-o schem de montaj ca cea din figura 3.44a, sunt urmtoarele:
- caracteristica randamentului: = (Pu);
- caracteristica factorului de putere: cos = f(Pu);
- caracteristica curentului absorbit din reea: I = I(Pu);
- caracteristica cuplului: M = M(Pu).
n figura 3.44.b aceste caracteristici s-au reprezentat grafic, n mrimi adimensionalizate prin raportare la datele nominale.
a. schema de montaj b. caracteristicile electromecanice
Fig. 3.44 Funcionarea n sarcin a motorului sincron Pornirea motorului sincron este o problem mai dificil dect la celelalte tipuri de motoare electrice, deoarece el nu are cuplu propriu de pornire. Doar la nvrtirea rotorului la turaia de sincronism, n acelai sens cu cmpul nvrtitor statoric, maina dezvolt cuplu electromagnetic. Metodele de pornire ale motorului sincron presupun aducerea arborelui la turaia de sincronism printr-unul dintre urmtoarele procedee:
1. Antrenarea arborelui cu un motor auxiliar, care este scos din funciune dup prinderea n sincronism; la cuplarea la reea a statorului ns, trebuie luate msuri de sincronizare, deoarece maina sincron, n momentul cuplrii pe reea, este n regim de generator i sistemul de tensiuni al generatorului trebuie s se suprapun identic peste sistemul de tensiuni al reelei (adic s aib aceeai valoare efectiv, aceeai frecven, aceeai succesiune a fazelor i n momentul cuplrii tensiunile omoloage s fie n faz). Metoda de realizare i verificare a acestor condiii se numete sincronizare fin i se bazeaz pe msurarea diferenelor dintre tensiunile sistemului reelei i generatorului sincron i ajustarea acestora din urm prin varierea turaiei motorului de antrenare i a curentului de excitaie.
Pu/Pn
1
1
cos
I/In
M/Mn
U1, f1 3~
R S T W2
A1
A2
A3
W1
V
MS 3~
U V W
n1 M
-M
=
A
Iex
I
F
102 M. Morega, MAINI ELECTRICE
Aceast metod se aplic i la cuplarea n paralel cu reeaua a generatoarelor sincrone din centralele electrice. 2. Pornirea n asincron este metoda cea mai des utilizat i se poate aplica motoarelor sincrone cnd nfurarea de excitaie este nchis pe o rezisten de valoare mare (de cca. zece ori mai mare dect rezistena nfurrii). Unele maini au o nfurare suplimentar scurtcircuitat, ca o colivie de motor asincron, dispus n crestturi practicate n lungul tlpilor polare i numit nfurare de amortizare. Ea are rol activ doar la turaii diferite de turaia de sincronism, cnd maina se comport ca un motor asincron, n timp ce la sincronism t.e.m. induse n aceast nfurare (v. principiul de funcionare al mainii asincrone) sunt nule, deoarece ele sunt proporionale cu alunecarea i la sincronism s = 0. Circuitul feromagnetic masiv al rotorului poate i el juca rol de colivie de pornire datorit t.e.m. induse i curenilor turbionari ce apar la funcionare asincron. Dup ce arborele ajunge la turaia subsincron n = (1 - s) n1 (apropiat ns ca valoare de n1, ca i la motorul asincron), se alimenteaz nfurarea de excitaie de la sursa de tensiune continu. Cmpurile magnetice nvrtitoare se sincronizeaz, dup un scurt regim tranzitoriu i produc cuplu electromagnetic. Se spune c maina "se prinde n sincronism". 3. Pornirea prin alimentarea nfurrii statorice de la o surs de tensiune i frecven variabil, crescnd frecvena de la zero, permite creterea treptat, de la zero, a turaiei cmpului nvrtitor inductor; este astfel posibil antrenarea treptat, din repaus, a rotorului. Reglarea turaiei de sincronism (n1 = 60 f1/p) poate fi fcut numai prin varierea numrului de perechi de poli ai nfurrii statorice sau prin varierea frecvenei tensiunii de alimentare. Varierea lui p este imposibil la masina sincron, deoarece, pentru a asigura sincronismul cmpurilor nvrtitoare, numrul perechilor de poli ai nfurrii statorice trebuie s fie egal cu numrul perechilor de poli ai rotorului, iar acesta din urm este impus de construcia rotorului. Variaia frecvenei f1 se poate face cu un convertor static, un reglaj eficient trebuind s fie fcut prin variere continu. Aceast metod se aplic la acionri unde i pornirea se face prin creterea treptat a frecvenei. Un exemplu de astfel de instalaie este acionarea morilor (de ciment, crbune, cereale, etc) cu motor sincron inelar (diametrul mainii este mult mai mare dect lungimea ei) alimentat de la reea prin intermediul unui cicloconvertor (figura 3.45); de la aceeai reea, printr-un redresor n punte se alimenteaz i nfurarea de excitaie a motorului. Instalaia permite pornirea n asincron, cu introducerea n circuit a rezistenei Rp i funcionarea la o frecven a tensiunii de alimentare de cca. (0,2...0,3) din frecvena reelei. Prin comanda aprinderii tiristoarelor se poate regla att amplitudinea ct i frecvena tensiunii de alimentare, putndu-se asigura raportul U1/f1 = const (din aceleai motive ca la motorul asincron). Datorit posibilitilor reduse de reglare a turaiei motorului sincron, utilizarea lui este preferat n acionri de turaie constant i unde turaia nu trebuie s fie afectat de sarcin: pompe centrifuge i cu piston, ventilatoare, compresoare lente (cu piston), mori i concasoare, elicele vapoarelor, unele tipuri de laminoare, etc. O alt direcie de larg utilizare a motorului sincron este n acionrile de finee: sisteme de poziionare, unde se utilizeaz construcii speciale de maini sincrone de puteri mici (unele dintre ele sunt prezentate n continuare). Avantajele utilizrii motorului sincron constau, pe de o parte, n faptul c poate funciona la acelai cuplu activ cu diferii factori de putere (intereseaz regimul capacitiv) i
Capitolul 3 Maini de curent alternativ 103
pe de alt parte c, la o scdere a tensiunii la borne se poate menine cuplul electromagnetic constant prin creterea curentului de excitaie, ceea ce nu se poate realiza la alt tip de motor.
Fig. 3.45 Instalaie de acionare cu motor sincron alimentat prin cicloconvertor
Meninerea riguros constant a turaiei la variaiile cuplului poate fi privit ca un avantaj i constituie principalul motiv al utilizrii motorului sincron n acionrile de precizie de tipul echipamentelor electro-mecanice analogice: la perifericele calculatoarelor (cititor de band, antrenarea hrtiei pentru imprimant), la aparatura audio-vizual (aparat de proiecie film, rulare banda casetofon, videorecorder si videoplayer, cap citire pic-up), aparatura medical (inregistratoare grafice de semnale). Deasemenea, se utilizeaz n transmisia la distanta a informatiilor si semnalelor: telefonie, telegrafie, transmisie sincron a micrii, etc. In prezent, o bun parte din aceste aplicatii sunt depsite, nu mai sunt de actualitate, fiind foarte rapid inlocuite cu tehnologiile bazate pe achizitia, conversia analog-digiala a semnalelor si a imaginilor si stocarea informatiei in format electronic.