Verificarea sensului de rotaţie a motoarelor asincrone.
9
VERIFICAREA SENSULUI DE ROTAŢIE A MOTOARELOR ASINCRONE. DETERMINAREA RAPORTULUI DE TRANSFORMARE LA MOTOARELE ASINCRONE CU ROTORUL BOBINAT 1. Verificarea sensului de rotaţie a motoarelor asincrone Aspecte generale Sensul de rotaţie al maşinii electrice este dictat de sensul de rotaţie al motorului de antrenare în cazul generatoarelor sau de necesitatea unui anumit sens de rotaţie al agregatului sau mecanismului pentru motoare. Verificarea sensului de rotaţie are o importanţă deosebită în cazul motoarelor care acţionează instalaţii cu sens restrictiv de rotaţie (pompe, ventilatoare, malaxoare) şi unde acţionarea într-un sens incorect poate conduce la distrugerea instalaţiei sau agregatului sau mecanismului respectiv. În practică există suficiente exemple care evidenţiază cazuri de avarii provocate de acţionarea incorectă a instalaţiilor respective. Unul din aceste exemple (fig.1) prezintă cazul avarierii unui transformator, datorită funcţionării incorecte a servosistemului destinat pentru acţionarea comutatorului folosit pentru reglarea sub sarcină a tensiunii. Alimentarea servosistemului cu un sistem de tensiuni de succesiune incorectă a condus la o necorelare între sensul de rotaţie a motorului asincron şi ansamblul
-
Upload
neculaitarabuta -
Category
Documents
-
view
885 -
download
9
Transcript of Verificarea sensului de rotaţie a motoarelor asincrone.

VERIFICAREA SENSULUI DE ROTAŢIE A MOTOARELOR ASINCRONE.
DETERMINAREA RAPORTULUI DE TRANSFORMARE LA MOTOARELE
ASINCRONE CU ROTORUL BOBINAT
1. Verificarea sensului de rotaţie a motoarelor asincrone
Aspecte generale
Sensul de rotaţie al maşinii electrice este dictat de sensul
de rotaţie al motorului de antrenare în cazul generatoarelor sau
de necesitatea unui anumit sens de rotaţie al agregatului sau
mecanismului pentru motoare.
Verificarea sensului de rotaţie are o importanţă
deosebită în cazul motoarelor care acţionează instalaţii cu sens
restrictiv de rotaţie (pompe, ventilatoare, malaxoare) şi unde
acţionarea într-un sens incorect poate conduce la distrugerea
instalaţiei sau agregatului sau mecanismului respectiv. În
practică există suficiente exemple care evidenţiază cazuri de
avarii provocate de acţionarea incorectă a instalaţiilor
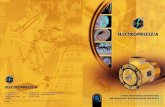
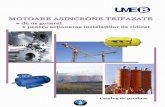
respective. Unul din aceste exemple (fig.1) prezintă cazul
avarierii unui transformator, datorită funcţionării incorecte a
servosistemului destinat pentru acţionarea comutatorului folosit
pentru reglarea sub sarcină a tensiunii. Alimentarea
servosistemului cu un sistem de tensiuni de succesiune
incorectă a condus la o necorelare între sensul de rotaţie a
motorului asincron şi ansamblul limitatoarelor de cursă montate
în cadrul servosistemului. Drept urmare s-a ajuns la depăşirea
limitelor extreme ale comutatorului de prize urmate de
avarierea acestuia precum şi a înfăşurărilor aşa cum indică
imaginile prezentate în fig.1.
Stabilirea sensului de rotaţie. Dacă maşina nu
posedă decât un singur capăt de arbore (sau posedă două capete
de arbore de diametre diferite) sensul de rotaţie este cel pe
care-l vede un observator aşezat cu faţa spre arborele unic (sau
în faţa arborelui cu diametrul mai mare).
Dacă posedă două capete de arbore de acelaşi diametru
sau nu posedă capete de arbore, observatorul trebuie plasat:
a) În partea opusă colectorului sau inelelor colectoare,
dacă nu există colector şi (sau) inel decât într-o parte a maşinii;
b) În partea inelelor dacă maşina posedă într-o parte
colectorul şi în cealaltă inelelor colectoare;

c) conform standardului de produs în cazul când
convenţiile precedente duc la confuzii.
Sensul de rotaţie “dreapta” corespunde la rotaţia
maşinii în sens orar.
Sensul de rotaţie “stânga” corespunde la rotaţia maşinii
în sens antiorar.
Sensul de rotaţie al unui motor asincron este dat de
sensul de rotaţie al câmpului învârtitor creat de stator şi care la
rândul său este dat de sensul de succesiune a fazelor. Din cele
arătate rezultă că sensul de rotaţie al unui motor asincron poate
fi schimbat dacă se modifică succesiunea fazelor sistemului
trifazat al tensiunilor de alimentare. În mod practic acest lucru
se poate realiza prin inversarea a două legături între stator şi
placa de borne sau prin inversarea a două legături între placa de
borne şi cablul de alimentare.
Modul de lucru
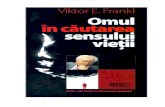
Verificarea sensului de rotaţie a unui motor electric
asincron cu rotorul bobinat presupune transformarea temporară
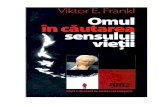
a motorului asincron într-un motor sincron. În acest scop
înfăşurarea rotorică este conectată după schema prezentată în
fig.2 şi este alimentată de la o sursă de curent continuu.
Fig. 1: a – avaria arborelui de acţionare a selectorului (vedere generală); b – avaria arborelui de acţionare a selectorului (vedere detailată);
c – avaria contactorului (vedere generală); d – idem (detaliu); e – avaria înfăşurării de înaltă tensiune;
f - avaria înfăşurării de joasă tensiune

Tensiunea de alimentare trebuie limitată la o valoare care să
conducă la un curent rotoric Irot = (0,05 – 0,1) Irot n .
La bornele motorului se racordează un dispozitiv pentru
identificarea succesiunii fazelor (DISF). Corespondenţa dintre
notaţia bornelor discului şi notaţia înfăşurărilor rotorice trebuie
să fie în mod obligatoriu cea indicată în fig.2. Se imprimă
rotorului o rotire cât se poate de bruscă, în sensul dorit.
Tensiunea indusă în înfăşurările statorice şi dată la aparat poate
fi suficientă pentru a indica succesiunea tensiunii obţinute. În
cazul în care DISF-ul indică succesiunea directă se poate
concluziona că sensul de rotaţie al motorului, atunci când
alimentarea se realizează cu un sistem echilibrat de tensiuni de
succesiune directă, este cel dorit.
Dacă valoarea tensiunii obţinute este prea mică, pentru
a executa proba se folosesc două transformatoare ridicătoare,
montate în V pentru alimentarea DISF-ului.
În cazul motoarelor cu rotorul în scurtcircuit sunt
utilizate, în general, metodele prezentate în continuare.
Se alimentează statorul cu o tensiune redusă, în cazul
motoarelor de tensiune înaltă, de obicei cu 3 x 380V, iar pentru
Fig. 2 Montajul pentru verificarea sensului de rotaţie a unui motor asincron cu rotorul bobinatIS – înfăşurare statorică; IR – înfăşurare rotorică ; T1, T2 – transformatoare ridicătoare;
DISF – dispozitiv pentru identificarea succesiunii fazelor; S.R.c.c. – sursă reglabilă de curent continuu
R S T
DISF
A
V
S.R. de c.c.
x1
a2
a2
Rx2
A1
A2
X2
X1
IR IS
U1
V1
W1
T1
T2
Motor asincron cu rotor bobinat

motoarele de tensiune joasă cu un sistem de tensiune trifazat
redus.
Se dă un cuplu de rotaţie rotorului în sensul dorit şi în
cazul în care sensul de rotaţie dat corespunde cu cel al
câmpului învârtitor, motorul se va roti încet în continuare.
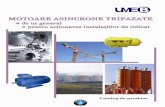
Pentru motoarele mari, alimentarea se face prin trei
ampermetre montate cum se indică în fig. 3.
Dacă la rotirea în sensul dorit ele vor arăta un curent în
scădere, rezultă că sensul de rotaţie corespunde cu cel al
câmpului.
În caz contrar indicaţiile aparatelor vor creşte ca rezultat
al sensurilor opuse al rotaţiei cu cel al câmpului.
Pentru obţinerea sensului de rotaţie necesar, se vor
inversa două faze între ele.
2. Determinarea raportului de transformare la motoare asincrone cu rotorul bobinat
Aspecte generale
Pentru determinarea raportului de transformare se
utilizează:
metoda alimentării trifazate a înfăşurării statorice;
metoda alimentării trifazice, succesiv, a înfăşurării
statorice şi rotorice;
metoda alimentării unei faze a înfăşurării statorice.
În mod obişnuit raportul de transformare se
determină prin metoda alimentării înfăşurării statorice. Pentru
determinări de precizie se poate utiliza una din celelalte două
metode.
Descrierea metodelor şi prezentarea modului de lucru
Metoda alimentării trifazate a înfăşurării statorice.
Pentru determinarea raportului de transformare, se aplică
DISF
S TR
RST
K
DISF
A1 A2 A3
Fig. 3 Montaj pentru verificarea sensului de rotaţie a motoarelor asincrone trifazate cu rotor în colivie prin alimentarea cu tensiune redusă

înfăşurării statorice un sistem simetric trifazat de tensiuni, cu
înfăşurarea rotorică deschisă, reostatul de pornire deconectat şi
rotorul imobil.
Se măsoară cele trei tensiuni de linie la bornele
înfăşurării statorice şi la inelele de contact.
La motoarele asincrone cu tensiune nominale până la
660 V inclusiv, se aplică înfăşurării statorice tensiunea de linie
nominală. La motoarele asincrone cu tensiunea nominală mai
mare de 660V se aplică înfăşurării statorice 10…..15% din
tensiunea de linie normală.
Raportul de transformare kt se determină cu relaţia:
Kt=
în care:
Us reprezintă media aritmetică a valorilor tensiunilor de
linie ale înfăşurării statorice;
Ur reprezintă media aritmetică a tensiunilor de linie ale
înfăşurării rotorice.
Metoda alimentării trifazate a înfăşurării statorice şi rotorice
Pentru determinarea raportului de transformare se
procedează astfel:
a) Se determină raportul de transformare ca la punctul
anterior;
b) Se aplică înfăşurării rotorice un sistem trifazat de
tensiuni, înfăşurarea statorică fiind deschisă şi rotorul fiind
blocat.
c) Se măsoară cele trei tensiuni de linie la bornele
înfăşurării statorice şi la inelele de contact.
La motoarele asincrone cu tensiunea nominală a
înfăşurării rotorice mai mică sau egală cu 660V, se aplică la
inelele de contact tensiunea de linie nominală. La motoarele cu
tensiunea nominală a înfăşurării rotorice mai mare de 660V se
aplică la inelele de contact 10…15% din tensiunea de linie
nominală.
Raportul de transformare determinat prin metoda
alimentării înfăşurărilor statorice şi rotorice este media
aritmetică a valorilor determinate utilizând relaţia de la punctul
2, pentru măsurările de la punctul 3 a şi 3 b.
Metoda alimentării unei faze a înfăşurării statorice
Pentru determinarea raportului de transformare prin
această metodă se procedează astfel:

a) se alimentează o singură fază (de exemplu faza
U1U2) a înfăşurării statorice cu tensiunea alternativă, de valoare
dată, menţinută constantă;
b) fazele constante (V1V2, W1W2) ale statorului sunt
deconectate;
c) înfăşurarea rotorică este deschisă, iar rotorul este
imobil;
d) se roteşte uşor rotorul (manual) până când se obţine
valoarea cea mai mare a tensiunii electromotoare, măsurată
între două inele oarecare;
e) se măsoară concomitent valoarea cea mai mare a
tensiunii electromotoare Uer, între două inele ale rotorului şi
tensiunile electromotoare UeV şi UeW la bornele fazelor libere ale
înfăşurării statorice.
Raportul de transformare se determină cu relaţia:
kt =
în care:
UeV,UeW reprezintă tensiunea electromotoare indusă în
fazele libere (V1V2, W1W2) ale înfăşurării statorice;
Uer reprezintă valoarea cea mai mare, în funcţie de
poziţia rotorului, a tensiunii electromotoare induse în două din
fazele înfăşurării rotorice, conectate în stea.