Unitatea Rotatiei Verticale 2
27
1.2. Acţionarea unităţilor de rotaţie verticală Sunt posibile cele trei tipuri de acţionare: electrică, hidraulică şi pneumatică. În funcţie de natura acţionării apar diferenţe şi în concepţia constructivă a unităţii, nu numai în acţionarea propriuzisă. Acţionarea pneumatică este mai puţin răspândită din cauza limitării numărului de puncte de oprire pe cursă şi a preciziei în cazul intenţiei de oprire în orice punct de pe cursă. În proiectarea acţionării trebuie considerate asigurarea capacităţii portante, precizia de rotire şi comanda. Unitatea de rotaţie reprezentând de obicei primul grad de libertate al robotului influenţa erorilor acesteia şi, în primul rând, precizia de rotire, este determinantă în precizia globală. Influenţa preciziei de rotire se poate arăta, considerând o structură RTT ca în fig. 3. Eroarea de rotire a unităţii reprezintă diferenţa dintre unghiul real de rotire şi unghiul teoretic : Componenta erorii de poziţie în planul OX 0 Y 0 are valoarea: , unde este “deschidera robotului ” până la puncul caracteristic M. Se poate deduce: Luând un exemplu pentru un robot cu precizie de
-
Upload
ion-tomita -
Category
Documents
-
view
229 -
download
0
description
Z
Transcript of Unitatea Rotatiei Verticale 2
Curs Roboti
1.2. Acionarea unitilor de rotaie vertical
Sunt posibile cele trei tipuri de acionare: electric, hidraulic i pneumatic. n funcie de natura acionrii apar diferene i n concepia constructiv a unitii, nu numai n acionarea propriuzis. Acionarea pneumatic este mai puin rspndit din cauza limitrii numrului de puncte de oprire pe curs i a preciziei n cazul inteniei de oprire n orice punct de pe curs.
n proiectarea acionrii trebuie considerate asigurarea capacitii portante, precizia de rotire i comanda.
Unitatea de rotaie reprezentnd de obicei primul grad de libertate al robotului influena erorilor acesteia i, n primul rnd, precizia de rotire, este determinant n precizia global.
Influena preciziei de rotire se poate arta, considernd o structur RTT ca n fig. 3. Eroarea de rotire a unitii reprezint diferena dintre unghiul real de rotire i unghiul teoretic :
Componenta erorii de poziie n planul OX0Y0 are valoarea:
,
unde este deschidera robotului pn la puncul caracteristic M. Se poate deduce:
Lund un exemplu pentru un robot cu precizie de poziionare medie: ; mm, rezult:
Din acest exemplu simplu se poate concluziona asupra preciziei ridicate de rotire ce se impune acionrii unitii de rotaie, cu att mai mult cu ct nu s-au luat n considerare erorile de deformaie i alte influene.
1.2.1. Acionarea electric.
Particularitile construciei apar, n primul rnd, funcie de tipul de reductor folosit. Se pot folosi reductoare armonice, reductoare cicloidale cu boluri, reductoare cu roi cilindrice n mai multe trepte. Utilizarea reductorului cu melc i roat melcat este limitat este limitat comportrii dinamice necorespunztoare la schimbarea sensului de rotaie i a dificultii de preluare a jocului din angrenare.
1.2.1.1. Aprecierea raportului de transmitere al acionrii
Sistemul de acionare va cuprinde, n toate cazurile, un reductor. Aceasta rezult simplu analiznd valorile extreme ale turaiei motoarelor electrice actuale de (3000...6000) rot/min (i chiar mai mult) i turaia la platoul de ieire al unitii de (90...360) 0/s = (15...60) rot/min. Din aceast simpl apreciere, ar rezulta un raport de transmitere al reductorului: it = 50...400.
O apreciere mai judicioas a raportului de transmitere se poate face dintr-o optimizare a transmisiei, n sensul minimizrii timpului de acionare pentru parcurgerea unui unghi la ieirea unitii cu cinematic numai cu periode de accelerare tac i frnare tf (fig. 4). Cinematica real (curbele 2 i 4) este nlocuit cu
Fig. 4
variaia simpl cu acceleraii constante (curbele 1 i 3). De acest lucru se ine cont prin factorii supraunitari:
n relaiile de mai sus la numrtoarele rapoartelor sunt unghiure reale parcurse n perioadele de accelerare i frnare, respectiv i la numitoare sunt unghiurile teoretice parcurse n exprimrile cinematice cu acceleraii constante.
Se mai consider i factorul:
,
care indic mrirea periodei de frnare pentru asigurarea (n finalul acesteia) a preciziei de poziionare.
Trezultatul calculului de optimizare este valoarea raportului de transmitere:
,
unde factorul A:
Dac se ia ca valoare uzual k1 = 2,6 se apreciat: . Relaia lui it devine:
(1)
Semnificaiile celorlalte mrimi din relaia (1) sunt:
- - viteza unghiular maxim a motorului;
- Jr - Momentul de inerie redus al unitii la nivelul arborelui de ieire, fr includerea efectului rotorului motorului;
- - unghiul parcurs de arborele de ieire al unitii n ciclul considerat;
Mrez - momentul rezistent redus la arborele motorului (partea disipativ);
Mm momentul maxim capabil al motorului.
Relaia (1) arat c raportul de transmitere necesar scade odat cu creterea rezervei de putere a motorului: Mm Mrez . Valorile raportului de transmitere ce se obin sunt de: it = 50...300. Se pot realiza direct cu reductoare armonice. n cazul reductoarelor cicloidale cu boluri sunt necesare cel puin dou trepte. n cazul reductoarelor planetare ce au pe treapt sunt necesare 2..3 trepte. La reductoarele cu roi cilindrice ce au se introduc 3...4 trepte de reducere.
1.2.1.2. Utilizarea reductoarelor armonice
Reductorul armonic se utilizeaz adeseori (v. fig. 1 i fig. 2) pentru acionarea unitilor de rotaie vertical avnd avantajele:
raport de transmitere mare;
lipsa jocului n angrenare ce s-ar manifesta la schimbarea sensului de rotaie, deoarece la aceste reductoare deformatorului realizeaz o prestrngere radial n sensul element elastic-coroan dinat;
Dezavantajul acestor tipuri de reductoare este rigiditatea torsional ceva mai sczut fa de cele cicloidale cu boluri i cele cu roi cilindrice.
n fig. 5 este redat soluia constructiv de unitate de rotaie din fig. 1, dar cu reductorul armonic reprezentat n detaliu. Fixarea motorului electric 3 se face
Fig. 5
prin piesa intermediar (adaptor) 2. Adaptorul este fixat prin uruburile 10 de coroana dinat 9, care este solidarizat de corpul unitii cu uruburile 1.
Buca cu flan 5 este cuplat de arborele 4 al motorului electric prin pana 5. Transmiterea cuplului la deformatorul eliptic 6 se face prin piesa intermediar 7. Aceste trei elemente: 5, 7 i 6 formeaz un cuplaj de tip Olham ce confer mobilitate radial necesar pentru a compensa erorile de centrare dintre arborele motorului i coroana dinat. n fig. 6 sunt reprezentate 3D aceste trei elemente ale cuplajului. Pe deformator este montat rulmentul special 8 ce are inele deformabile.
O dat cu arborele motorului se va roti i deformatorul care are suprafaa exterioar de form eliptic. Elementul deformabil 11 (pahar) este danturat exterior cu modul de valori (0,3...0,6) mm i numr de dini z1 . Paharul angreneaz cu coroana 10, danturat interior cu numr de dini z2 .Contactul dinilor n angrenare se face n dou zone opuse, deoarece diferena dintre numerele de dini: z2 z1 = 2.
Diferena dintre axele elipsei deformatorului 6 este redus, de ordinul de mrime al nlimii danturii. Rotaia deformatorului va duce la deformarea continu la ncovoiere a peretelui paharului elastic, acesta fiind puternic solicitat, dei grosimea
Fig. 6
Paharul este solidarizat cu platoul 13 al unitii cu ajutorul uruburilor 14 i a piesei de centrare 15. raportul de transmitere al reductorului armonic este:
Semnul - arat schimbarea de sens de rotaie. Se pot realiza valori mari:
Pentru controlul poziiei unghiulare a unitii se introduce un traductor de poziie unghiular 1 (fig. 1) . Acesta poate fi de tip incremental optic sau analogic, de exemplu de tip inductosyn. Traductoarele analogice de tip poteniometric se utilizeaz mai rar , dat fiind durabilitatea lor redus.
Prin prelucrarea semnalului de poziie se poate obine i un semnal proporional cu viteza, n acest caz nemaifiind necesar folsirea unui tahogenerator.
1.2.1.3. Utilizarea reductoarelor cicloidale cu bolurin fig.7 este redat acionarea direct a platoului 8 utiliznd un reductor planetar cu boluri. Aceste reductoare au o rigiditate mai bun dect n cazul reductorului armonic. Micarea de la motor ajunge la arborele 1 pe care este fixat buca 2 cu dou zone excentrice, pe care sunt aezai rulmenii 3. Pe inelele exterioare ale rulmenilor sunt dispuse dou discuri 4 ce poart dantura cicloidal care angreneazcu bolurile 5 fixate n corpul 6. Micarea la arborele de ieire 7 se preia
Fig. 7
prin bolurile 9 ce iau contact cu gurile din discurile 4.
Raportul de transmitere este:
iR = - z1,
unde z1 este numrul de dini al discurilor cu dantur cicloidal.
1.2.1.4. Utilizarea reductoarelor cu roi dinate cilindrice
Aa cum s-a menionat n & 1.2.2.1 dac se utilizeaz astfel de reductoare sunt necesare 3...5 trepte pentru a realiza raportul de transmitere total necesar. Principala problem ce apare este influena jocului de flanc din angrenaje care conduce la o curs moart la schimbarea sensului de rotaie, ceeace nu este admisibil n construcia roboilor.
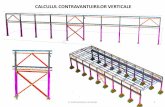
O posibil rezolvare raional este pretensionarea la torsiune a ntregului lan cinematic, prin adugarea unei ramuri suplimentare (fig. 8) (roile dinate sunt reprezentate incomplet cu cte unul i doi dini pentru a se observa mai bine
Fig. 8
angrenajele). Lanul cinematic principal este, n acest exemplu, format din 4 trepte: treapta 1-a cu roile 1 i 2; treapta 2-a cu roile 2 i 3; treapta 3-a cu roile 3 i 4 i treapta 4-a cu roile 4 i 5. Roata 1 este solidar cu arboreal motorului electric de antrenare iar roata 5 este solidar cu arborele de ieire al unitii. Celelalte roi din acest lan sunt dou cte dou solidare i pe acelai arbore (roile 2 cu 2 pe arborele O2; 3 cu 3 pe arborele O3 i 4 cu 4 pe arboreal O4 ).
Se introduce un lan cinematic suplimentar cu arborii: O2s ; O3s ; O4s ; O4s. Din punct de vedere cinematic conteaz numai ca raportul de transmitere total s fie acelai pe ambele lanuri cinematice i nu i rapoartele de transmitere pariale. Rapoartele de transmitere pe cele dou lanuri sunt:
Se impune, numai: .
n laul cinematic suplimentar se decupleaz roile de pe unul din arbori; n acest exemplu de pe arborele O3s , sunt decuplate roile 3s i 3s . ntre aceste roi se introduce cuplajul elastic C pretensionat cu momentul Me . Dac acest moment este suficient ca valoare, el se transmite n anumite proporii n circuitul nchis format din cele dou lanuri cinematice. Aceasta conduce la meninerea angrenrii pe acelai tip de flancuri. De exemplu: Pentru angrenajul 4-5 contactul se menine pe flancurile drepte; pentru angrenajul 4s-5 contactul se menine pe flancurile stngi, etc. Aceste contacte se menin i la schimbarea sensului de rotaie, deci nu se va manifesta jocul de flanc n nici-unul din angrenaje.
Aa cum se va arta mai departe scderea randamentului fa de o transmisie clasic deschis este relativ redus. De asemenea nici creterea momentului de inerie redus nu este mare (sub 20%). Complicaiile constructive apar la realizarea cuplajului C, ce va trebui s asigure o reglare comod a cuplului
, ct i o btaie radial minim a roii dinate de pe arborele respectiv. Fa de o transmisie clasic apare i o cretere a gabaritului, care poate fi limitat prin poziionarea corespunztoare a arborilor. Avantajul prelurii jocurilor de flanc cu meninerea unui randament bun i al unui moment de inerie acceptabil recomand introducerea acestui tip de transmisie mecanic pentru antrenarea modulelor de rotaie.
Dimensionarea cuplajului elastic C (calculul cuplulului Me de pretensionare) se va face din considerentul acoperirii:
- pierderilor prin frecare pe calea cea mai deprtat: O3,s O4,s O5 O4 O3 O2 de la cuplaj pn la angrenajul 1-2;
efectului cuplurilor ineriale necesare accelerrii n perioada tranzitorie;
efectului momentului rezistent la arborele de ieire.
n [Tez] este prezentat metodica de calcul pentru momentul elestic Me. Mai jos este dat relaia practic de calcul:
(2)Au fost notate:
J2 momentul de inerie al arborelui 2 (practic egal cu al roii 2);
(1 acceleraia unghiular [s-2] a motorului n perioada tranzitorie de accelerare; Ms momentul minim ce trebuie asigurat n timpul funcionrii la nivelul arborelui de intrare pentru a menine contactul treptei 1. Se poate lua Ms = (0,080,15) Nm; Mrez - momentul rezistent (disipativ) la arboreal de ieire a unitii.Factorii A, B i C depind de parametrii:
raportul de transmitere al unei trepte de angrenare, presupus egal pe ntre trepte, cu excepia ultimei trepte;
n numrul de arbori al unui lan cinematic ( n = nr. trepte + 1);
k numrul arborelui pe care este introdus cupljul (n exemplu din fig. 8
k = 3);
t raportul dintre momentul de inerie total al arborelui de ieire al unitii (incluznd structura robotului) i momentul de inerie la nivelul aceluiai arbore considernd numai partea din reductor.
Au mai fost adoptate unele valori practice:
randamentul unui angrenaj: ;
randamentul lgruirii unei trepte: ;
t = 8...10 ; mai jos a fost luat t = 8.
Valorile factorilor A, B i C se pot lua din tabelul 3.
n fig. 9 i fig. 10 este redat o unitate de rotaie vertical cu reductor cu preluarea jocului n circuit nchis cu lan cinematic de pretensionare. Seciunea din fig. 9 este fcut n trepte prin arborii lanului cinematic suplimentar.
Se folosesc 4 tipuri de lagre: lagre cu rulmeni radiali L1 pentru arborii O2,s i O3,s i cu rulmeni radiali cu ace L2 pentru arborele O4,s (pentru reducerea gabaritului radial). Pentru arborele de ieire al unitii Az este folosit rulmentul radial-axial cu role ncruciate L3 i rulmentul radial cu role cilindrice L4.
Pe arborele O3,s este introdus cuplajul elastic de pretensionare C realizat cu bar de torsiune ce este detaliat n fig. 11.
n fig. 10 (seciunea B B) se observ c gabaritul unitii nu crete prea mult fa de varianta la care nu ar exista lan cinematic suplimentar datorit dispunerii judicioase a arborilor reductorului.
n fig. 11 este redat construcia cuplajului de pretensionare. Roile 3s i 3s nu mai sunt solidare. ntre ele se realizeaz un lagr realizat cu coliviile cu ace5. Elementul elastic de pretensionare este bara de torsiune 6 ale crei capete sunt fixate unul de arborele-roat 3s cellalt de caseta 8. Pentru a obine pretensionarea trebuie
Tabelul 3
i=3 i=3,5 i=4
nn-k A B C A B C A B C
312,4983,2540,3442,0493,7960,2951,7274,340,258
415,55610,0620,3445,8213,6960,2955,44717,890,258
2 1,9363,4580,1181,7454,0340,08681,4364,610,0664
112,66731,1210,34417,37149,4190,29518,24573,770,258
525,71910,6940,1185,18714,5560,08684,78219,010,0664
32,1763,6750,04061,7014,2880,02561,3794,900,0171
144,75896,250,34454,31178,310,29564,606304,20,258
215,49833,0760,11816,1652,5230,086816,85274,400,0664
635,76211,3660,04065,15915,4710,02564,71220,210,0171
42,1993,9060,0141,704,5570,00751,3675,2080,0044
1125,52297,680,344176,67643,400,295239,6312540,258
243,376102,290,11852,41189,520,086862,266323,30,0664
7315,81435,1530,040616,35955,8820,025616,97883,320,0171
45,88912,080,0145,23416,4420,00754,75921,470,0044
52,2484,1510,00481,7274,8430,00221,3835,530,0011
Fig.9
Fig. 10
rotit caseta fa de partea de arbore tubular ce face parte din roata 3s . n acest scop n caset sunt montai melcii 7 i 9 ce angreneaz cu o zon danturat executat n arborele tubular. Unul din melci servete pretensionrii (cellalt este demontat), ulterior, cu cel de al doilea se face asigurarea contra desfacerii.
1.2.1.5. Precizia unitilor de rotire
Aa cum s-artat n & 1.2. este necesar asigurarea unei precizii de rotire relativ ridicate de . Din punct de vedere a cauzelor erorii de rotire
Fig. 11
acestea sunt: eroarea cinematic, eroarea cursei moarte i eroarea datorat traductorului de poziie unghiular. Mai jos se vor face unele considerente asupra acestor erori n cazul transmisiilor cu roi dinate.
Eroarea cinematic apare ca urmare a existenei erorilor de execuie i montaj ale roilor dinate ce formeaz angrenajul. Unghiul de rotaie al roii conduse
difer de unghiul de rotaie al mecanismului ideal (fig.12), pentru o valoare dat a unghiului de rotaie
al roii conductoare:
,
unde este eroarea de poziie a roii conduse; este eroarea ce se msoar pe
periferia cercului de divizare al roii conduse. Diferena algebric dintre erorile de
Fig. 12
poziie se numete eroare cinematic: . Eroarea cinematic se poate aprecia fie prin metoda maxim-minim, fie prin metoda probabilistic. Prin metoda maxim-minim se dau:
,
unde pentru treptele de precizie 7 i 8
, pentru restul de trepte ; i sunt toleranele la eroarea cinematic ale roilor; i sunt coeficieni dependeni de compensarea de faz i depind de (Tab. 4).
Tab. 4
i121..1,51,5..22..2,52,5..33..3,53,5..44..4,54,5..55..5,55,5..66..6,56,5..
k,98,85,83,93,97,96,96,96,98,96,97,98
ks,80,76,75,74,75,80,90,87,85,88,94,99
este eroarea de montaj redus:
,
unde: este unghiul profilului de referin (
=200); este unghiul nclinrii dintelui; i sunt btaia radial i axial de montaj a roii:
;,
, sunt toleranele asupra componentelor primare ale btii radiale i axiale, respectiv.
Prin metoda probabilistic:
S-a notat prin coeficientul compensaiei de faz, determinat funcie de i12 i de factorul de risc p, ca n tab. 5.
Tab. 5
kP pentru valorile lui i12
p1..1,51,5..22..2,52,5..33..3,53,5..44..4,54,5..55..5,55,5..66..6,56,5..
32,58,68,60,74,71,71,68,71,78,70,78,80
10,92,78,73,88,82,82,80,82,90,88,91,94
4,5,95,83,81,91,92,91,88,92,94,94,94,96
1,0,96,84,82,92,95,95,94,95,97,95,96,96
Cursa moart n angrenaj. Reprezint diferena algebric dintre erorile de poziie unghiular ale roii conduse pentru aceiai poziie a roii conductoare, la cursa direct i invers:
Prin metoda de maxim-minim, valoarea maxim a cursei moarte msurat pe suprafaa de divizare:
S-au notat: -deplasri suplimentare minime ale profilului; - toleranele deplasrii suplimentare minime a profilului;
- tolerana variaiei distanei de msurat ntre axe; - jocul radial n lagrele roilor. Prin metoda probabilistic:
Eroarea cinematic la mecanismele cu mai multe trepte. Cnd aprecierea se face dup metoda maxim-minim, eroarea cinematic a ntregului mecanism este (la nivelul ultimei suprafee de divizare):
;
S-au notat: -eroarea cinematic a angrenajului j; - coeficientul de transmitere a erorii la ultimul arbore al mecanismului (fig.13).
Fig. 13
Prin metoda probabilistic:
,
unde coordonata jumtii cmpului de toleran al erorii cinematice este:
Cmpul de mprtiere al erorii cinematice: . Coeficientul este dat n tab.6 funcie de riscul p.
p104,51,00,270,1
t10,260,350,480,570,61
t20,210,280,390,460,5
Tab. 6
Cursa moart pentru mecanismele cu mai multe trepte se poate calcula funcie de cursele moarte ale fiecrui angrenaj (fig.13). Dac se noteaz: cursa moart a angrenajelor: 1-2, 2-3,..., (n-1)-n, respectiv se poate scrie:
Prin metoda maxim-minim cursa moart nsumat pentru mecanismul cu mai multe trepte va avea expresia:
unde: este cursa moart a angrenajului j.
Prin metoda probabilistic:
,
unde:
- ,
este coordonata mijlo-cului cmpului de toleran al cursei moarte;
-
este un coeficient ce se determin funcie de riscul p (tabelul de mai sus);-
, este cmpul de mprtiere a mrimii lui
n angrenajul j.
Eroarea de poziie datorat traductorului. Presupunem cunoscut traductorul, deci i eroarea sa (tr. Pentru traductoarele incrementale:
,
(3)
unde N este numrul de impulsuri date pentru o rotaie complet. n cazul divizrii suplimentare electronice, se consider numrul de impulsuri echivalent. Pentru traductoarele de tip analogic (inductosine, poteniometre, etc.) eroarea
este dat direct de firm. Dac traductorul este dispus pe arborele t al transmisiei, atunci componenta erorii traductorului n eroarea de rotire va fi:
(4)Eroarea de de rotire va cuprinde influena erorii cinematice, a cursei moarte i traductorului. Dac se noteaz cu raza de rostogolire a ultimei roi din mecanism, se poate scrie pentru eroarea de rotire:
Dac transmisia are preluat jocul de flanc (care reprezint componenta cea mai important a cursei moarte), atunci eroarea de rotire este sensibil micorat, relaia de mai sus devine:
(5)
_1129111410.unknown
_1129112194.unknown
_1129112298.unknown
_1129112406.unknown
_1129112796.unknown
_1129113111.unknown
_1129113728.unknown
_1129113784.unknown
_1129112797.unknown
_1129112485.unknown
_1129112720.unknown
_1129112795.unknown
_1129112410.unknown
_1129112367.unknown
_1129112374.unknown
_1129112324.unknown
_1129112209.unknown
_1129112248.unknown
_1129112250.unknown
_1129112233.unknown
_1129112201.unknown
_1129112205.unknown
_1129112197.unknown
_1129112066.unknown
_1129112089.unknown
_1129112126.unknown
_1129112138.unknown
_1129112093.unknown
_1129112068.unknown
_1129112069.unknown
_1129112067.unknown
_1129111977.unknown
_1129112062.unknown
_1129112064.unknown
_1129112065.unknown
_1129112063.unknown
_1129111986.unknown
_1129112061.unknown
_1129112060.unknown
_1129111978.unknown
_1129111890.unknown
_1129111893.unknown
_1129111976.unknown
_1129111805.unknown
_1129111808.unknown
_1129111795.unknown
_1128688045.unknown
_1128717747.unknown
_1128931495.unknown
_1128933053.unknown
_1128977240.unknown
_1128932990.unknown
_1128847062.unknown
_1128847063.unknown
_1128801561.unknown
_1128688402.unknown
_1128691849.unknown
_1128717679.unknown
_1128691732.unknown
_1128688102.unknown
_1128688214.unknown
_1128688091.unknown
_1128683756.unknown
_1128685209.unknown
_1128686969.unknown
_1128687765.unknown
_1128686652.unknown
_1128683923.unknown
_1128683963.unknown
_1128683887.unknown
_942037587.unknown
_1128683359.unknown
_1128683531.unknown
_1128683607.unknown
_1128683495.unknown
_1128683312.unknown
_1128683339.unknown
_1128683270.unknown
_942071067.unknown
_941841052.unknown
_941890288.unknown
_941892223.unknown
_941892598.unknown
_941892775.unknown
_941890542.unknown
_941881117.unknown
_941829579.unknown
_941835240.unknown
_941829336.unknown