surse de erori
21
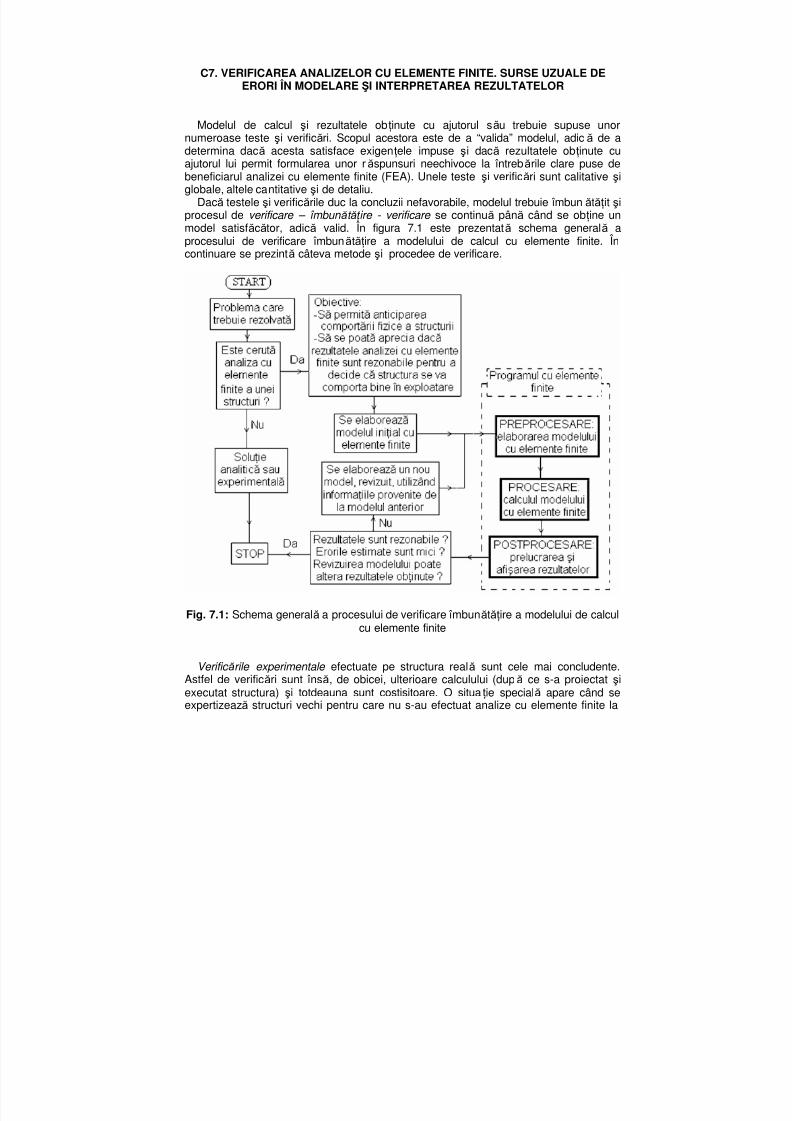
C7. VERIFICAREA ANALIZELOR CU ELEMENTE FINITE. SURSE UZUALE DE ERORI ÎN MODELARE ŞI INTERPRETAREA REZULTATELOR Modelul de calcul şi rezultatele ob ţinute cu ajutorul s ău trebuie supuse unor numeroase teste şi verificări. Scopul acestora este de a “valida” modelul, adic ă de a determina dacă acesta satisface exigen ţele impuse şi dacă rezultatele obţinute cu ajutorul lui permit formularea unor r ăspunsuri neechivoce la întreb ările clare puse de beneficiarul analizei cu elemente finite (FEA). Unele teste şi verificări sunt calitative şi globale, altele ca ntitative şi de detaliu. Dacă testele şi verificările duc la concluzii nefavorabile, modelul trebuie îmbun ătăţit şi procesul de verificare – îmbun ăt ăţ ire - verificare se continuă până când se obţine un model satisf ăcător, adică valid. În figura 7.1 este prezentat ă schema general ă a procesului de verificare îmbun ătăţire a modelului de calcul cu elemente finite. În continuare se prezint ă câteva metode şi procedee de verifica re. Fig. 7.1: Schema general ă a procesului de verificare îmbun ătăţire a modelului de calcul cu elemente finite Verific ările experimentale efectuate pe structura real ă sunt cele mai concludente. Astfel de verificări sunt însă, de obicei, ulterioare calculului (dup ă ce s-a proiectat şi executat structura) şi totdeauna sunt costisitoare. O situa ţie special ă apare când se expertizează structuri vechi pentru care nu s-au efectuat analize cu elemente finite la
Transcript of surse de erori
5/12/2018 surse de erori - slidepdf.com
http://slidepdf.com/reader/full/surse-de-erori 1/21
C7. VERIFICAREA ANALIZELOR CU ELEMENTE FINITE. SURSE UZUALE DEERORI ÎN MODELARE ŞI INTERPRETAREA REZULTATELOR
Modelul de calcul şi rezultatele obŃinute cu ajutorul său trebuie supuse unornumeroase teste şi verificări. Scopul acestora este de a “valida” modelul, adică de a
determina dacă acesta satisface exigenŃele impuse şi dacă rezultatele obŃinute cuajutorul lui permit formularea unor răspunsuri neechivoce la întrebările clare puse debeneficiarul analizei cu elemente finite (FEA). Unele teste şi verificări sunt calitative şiglobale, altele cantitative şi de detaliu.
Dacă testele şi verificările duc la concluzii nefavorabile, modelul trebuie îmbunătăŃit şiprocesul de verificare – îmbun ăt ăŃ ire - verificare se continuă până când se obŃine unmodel satisfăcător, adică valid. În figura 7.1 este prezentată schema generală aprocesului de verificare îmbunătăŃire a modelului de calcul cu elemente finite. Încontinuare se prezintă câteva metode şi procedee de verificare.
Fig. 7.1: Schema generală a procesului de verificare îmbunătăŃire a modelului de calculcu elemente finite
Verific ările experimentale efectuate pe structura reală sunt cele mai concludente.Astfel de verificări sunt însă, de obicei, ulterioare calculului (după ce s-a proiectat şiexecutat structura) şi totdeauna sunt costisitoare. O situaŃie specială apare când seexpertizează structuri vechi pentru care nu s-au efectuat analize cu elemente finite la
5/12/2018 surse de erori - slidepdf.com
http://slidepdf.com/reader/full/surse-de-erori 2/21
proiectare. Se pot face verificări experimentale şi pe modele fizice reduse la scară alestructurii reale, în astfel de cazuri fiind necesară rezolvarea problemelor de modelare şisimilitudine.
Determinările experimentale permit verificări cantitative ale rezultatelor obŃinute princalcul şi evaluarea preciziei acestora. Se pot verifica mărimi care provin dincomportarea globală a structurii, cum sunt deplasările sau reacŃiunile în reazeme, sau
mărimi cu caracter local, cum sunt tensiunile maxime.
Efectuarea calculelor pe dou ă sau mai multe modele şi compararea rezultatelorobŃinute. Modelele pot fi de acelaşi tip, adică elaborate pe baza aceleiaşi metode decalcul (de exemplu, metoda elemntelor finite - MEF) sau de tipuri diferite, adică elaborate pe baza unor metode de calcul diferite (de exemplu MEF şi metodaelementelor de frontieră sau o metodă analitică de calcul ).
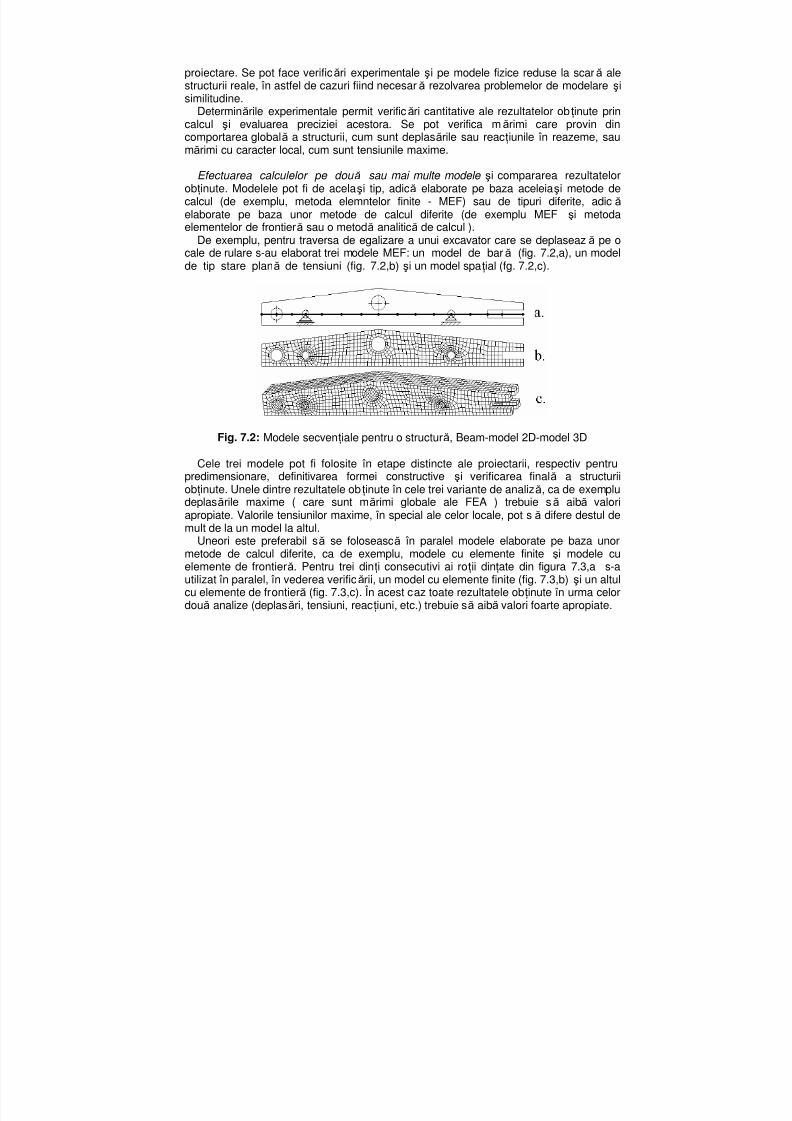
De exemplu, pentru traversa de egalizare a unui excavator care se deplasează pe ocale de rulare s-au elaborat trei modele MEF: un model de bară (fig. 7.2,a), un modelde tip stare plană de tensiuni (fig. 7.2,b) şi un model spaŃial (fg. 7.2,c).
Fig. 7.2: Modele secvenŃiale pentru o structură, Beam-model 2D-model 3D
Cele trei modele pot fi folosite în etape distincte ale proiectarii, respectiv pentrupredimensionare, definitivarea formei constructive şi verificarea finală a structuriiobŃinute. Unele dintre rezultatele obŃinute în cele trei variante de analiză, ca de exempludeplasările maxime ( care sunt mărimi globale ale FEA ) trebuie să aibă valoriapropiate. Valorile tensiunilor maxime, în special ale celor locale, pot să difere destul demult de la un model la altul.
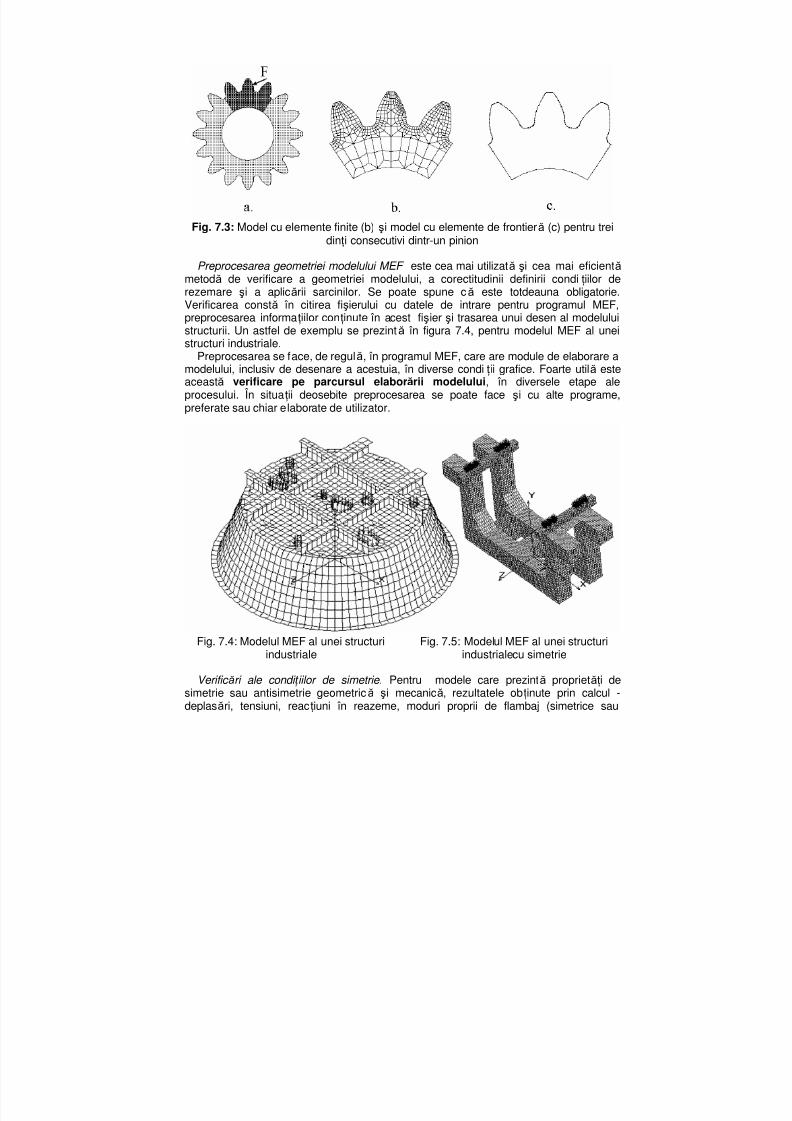
Uneori este preferabil să se folosească în paralel modele elaborate pe baza unormetode de calcul diferite, ca de exemplu, modele cu elemente finite şi modele cuelemente de frontieră. Pentru trei dinŃi consecutivi ai roŃii dinŃate din figura 7.3,a s-autilizat în paralel, în vederea verificării, un model cu elemente finite (fig. 7.3,b) şi un altulcu elemente de frontieră (fig. 7.3,c). În acest caz toate rezultatele obŃinute în urma celor
două analize (deplasări, tensiuni, reacŃiuni, etc.) trebuie să aibă valori foarte apropiate.
5/12/2018 surse de erori - slidepdf.com
http://slidepdf.com/reader/full/surse-de-erori 3/21
Fig. 7.3: Model cu elemente finite (b) şi model cu elemente de frontieră (c) pentru trei
dinŃi consecutivi dintr-un pinion
Preprocesarea geometriei modelului MEF este cea mai utilizată şi cea mai eficientă metodă de verificare a geometriei modelului, a corectitudinii definirii condiŃiilor derezemare şi a aplicării sarcinilor. Se poate spune că este totdeauna obligatorie.
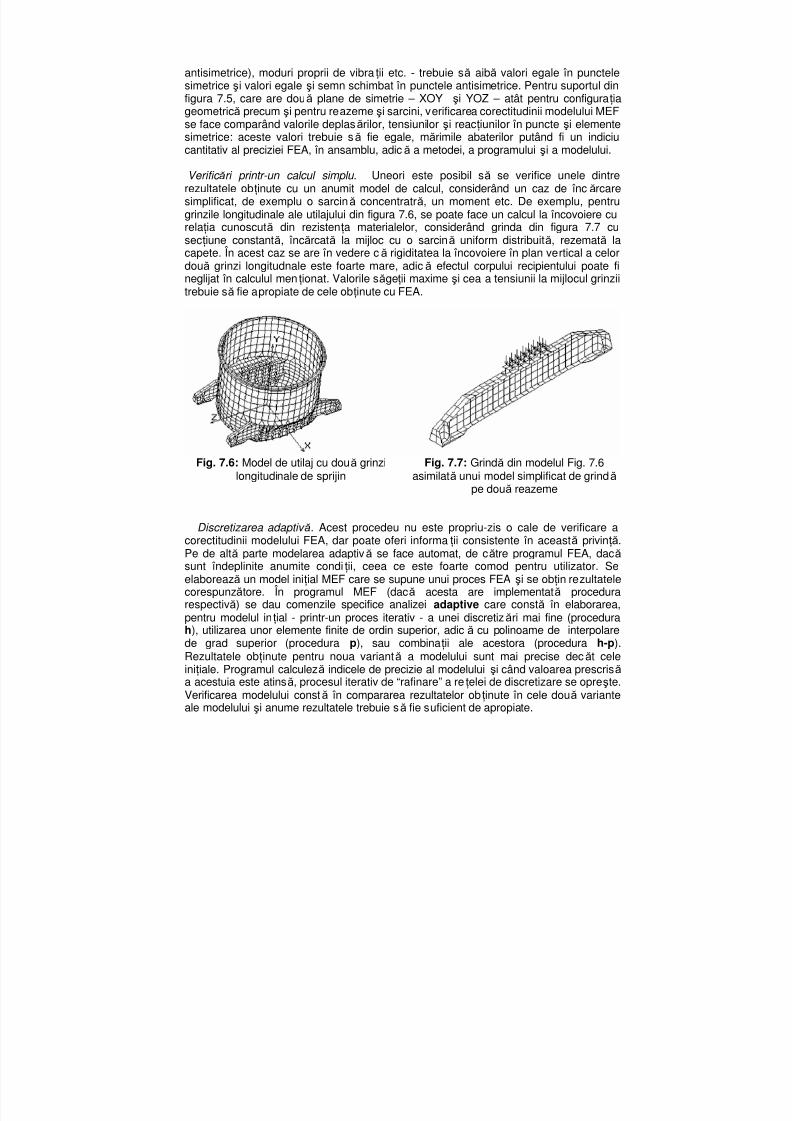
Verificarea constă în citirea fişierului cu datele de intrare pentru programul MEF,preprocesarea informaŃiilor conŃinute în acest fişier şi trasarea unui desen al modeluluistructurii. Un astfel de exemplu se prezintă în figura 7.4, pentru modelul MEF al uneistructuri industriale.
Preprocesarea se face, de regulă, în programul MEF, care are module de elaborare amodelului, inclusiv de desenare a acestuia, în diverse condiŃii grafice. Foarte utilă esteaceastă verificare pe parcursul elaborării modelului, în diversele etape aleprocesului. În situaŃii deosebite preprocesarea se poate face şi cu alte programe,preferate sau chiar elaborate de utilizator.
Fig. 7.4: Modelul MEF al unei structuriindustriale
Fig. 7.5: Modelul MEF al unei structuriindustrialecu simetrie
Verific ări ale condi Ń iilor de simetrie. Pentru modele care prezintă proprietăŃi desimetrie sau antisimetrie geometrică şi mecanică, rezultatele obŃinute prin calcul -deplasări, tensiuni, reacŃiuni în reazeme, moduri proprii de flambaj (simetrice sau
5/12/2018 surse de erori - slidepdf.com
http://slidepdf.com/reader/full/surse-de-erori 4/21
antisimetrice), moduri proprii de vibraŃii etc. - trebuie să aibă valori egale în punctelesimetrice şi valori egale şi semn schimbat în punctele antisimetrice. Pentru suportul dinfigura 7.5, care are două plane de simetrie – XOY şi YOZ – atât pentru configuraŃiageometrică precum şi pentru reazeme şi sarcini, verificarea corectitudinii modelului MEFse face comparând valorile deplasărilor, tensiunilor şi reacŃiunilor în puncte şi elementesimetrice: aceste valori trebuie să fie egale, mărimile abaterilor putând fi un indiciu
cantitativ al preciziei FEA, în ansamblu, adică a metodei, a programului şi a modelului.
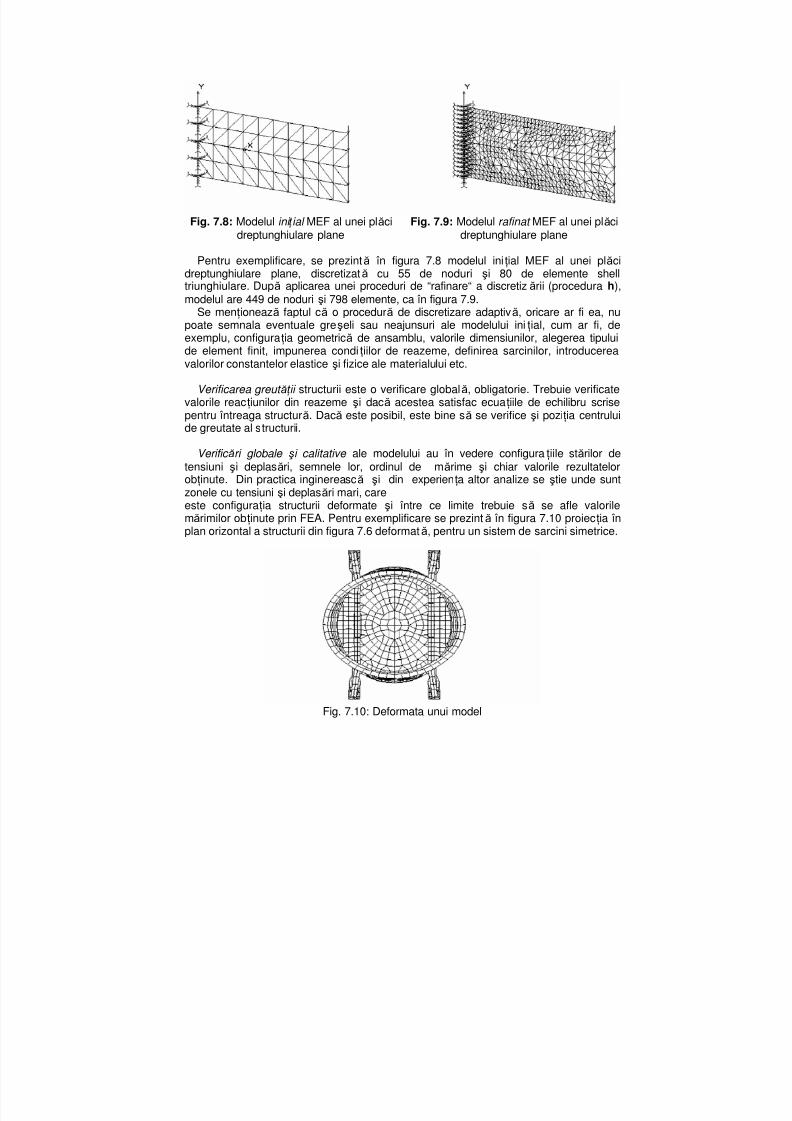
Verific ări printr-un calcul simplu. Uneori este posibil să se verifice unele dintrerezultatele obŃinute cu un anumit model de calcul, considerând un caz de încărcaresimplificat, de exemplu o sarcină concentratră, un moment etc. De exemplu, pentrugrinzile longitudinale ale utilajului din figura 7.6, se poate face un calcul la încovoiere curelaŃia cunoscută din rezistenŃa materialelor, considerând grinda din figura 7.7 cusecŃiune constantă, încărcată la mijloc cu o sarcină uniform distribuită, rezemată lacapete. În acest caz se are în vedere că rigiditatea la încovoiere în plan vertical a celordouă grinzi longitudnale este foarte mare, adică efectul corpului recipientului poate fineglijat în calculul menŃionat. Valorile săgeŃii maxime şi cea a tensiunii la mijlocul grinziitrebuie să fie apropiate de cele obŃinute cu FEA.
Fig. 7.6: Model de utilaj cu două grinzilongitudinale de sprijin
Fig. 7.7: Grindă din modelul Fig. 7.6asimilată unui model simplificat de grindă
pe două reazeme
Discretizarea adaptiv ă. Acest procedeu nu este propriu-zis o cale de verificare acorectitudinii modelului FEA, dar poate oferi informaŃii consistente în această privinŃă.Pe de altă parte modelarea adaptivă se face automat, de către programul FEA, dacă sunt îndeplinite anumite condiŃii, ceea ce este foarte comod pentru utilizator. Seelaborează un model iniŃial MEF care se supune unui proces FEA şi se obŃin rezultatelecorespunzătore. În programul MEF (dacă acesta are implementată procedura
respectivă) se dau comenzile specifice analizei adaptive care constă în elaborarea,pentru modelul inŃial - printr-un proces iterativ - a unei discretizări mai fine (procedurah), utilizarea unor elemente finite de ordin superior, adică cu polinoame de interpolarede grad superior (procedura p), sau combinaŃii ale acestora (procedura h-p).Rezultatele obŃinute pentru noua variantă a modelului sunt mai precise decăt celeiniŃiale. Programul calculeză indicele de precizie al modelului şi când valoarea prescrisă a acestuia este atinsă, procesul iterativ de “rafinare” a reŃelei de discretizare se opreşte.Verificarea modelului constă în compararea rezultatelor obŃinute în cele două varianteale modelului şi anume rezultatele trebuie să fie suficient de apropiate.
5/12/2018 surse de erori - slidepdf.com
http://slidepdf.com/reader/full/surse-de-erori 5/21
Fig. 7.8: Modelul ini Ń ial MEF al unei plăcidreptunghiulare plane
Fig. 7.9: Modelul rafinat MEF al unei plăcidreptunghiulare plane
Pentru exemplificare, se prezintă în figura 7.8 modelul iniŃial MEF al unei plăcidreptunghiulare plane, discretizată cu 55 de noduri şi 80 de elemente shelltriunghiulare. După aplicarea unei proceduri de “rafinare“ a discretizării (procedura h),
modelul are 449 de noduri şi 798 elemente, ca în figura 7.9.Se menŃionează faptul că o procedură de discretizare adaptivă, oricare ar fi ea, nupoate semnala eventuale greşeli sau neajunsuri ale modelului iniŃial, cum ar fi, deexemplu, configuraŃia geometrică de ansamblu, valorile dimensiunilor, alegerea tipuluide element finit, impunerea condiŃiilor de reazeme, definirea sarcinilor, introducereavalorilor constantelor elastice şi fizice ale materialului etc.
Verificarea greut ăŃ ii structurii este o verificare globală, obligatorie. Trebuie verificatevalorile reacŃiunilor din reazeme şi dacă acestea satisfac ecuaŃiile de echilibru scrisepentru întreaga structură. Dacă este posibil, este bine să se verifice şi poziŃia centruluide greutate al structurii.
Verific ări globale şi calitative ale modelului au în vedere configuraŃiile stărilor detensiuni şi deplasări, semnele lor, ordinul de mărime şi chiar valorile rezultatelorobŃinute. Din practica inginerească şi din experienŃa altor analize se ştie unde suntzonele cu tensiuni şi deplasări mari, careeste configuraŃia structurii deformate şi între ce limite trebuie să se afle valorilemărimilor obŃinute prin FEA. Pentru exemplificare se prezintă în figura 7.10 proiecŃia înplan orizontal a structurii din figura 7.6 deformată, pentru un sistem de sarcini simetrice.
Fig. 7.10: Deformata unui model
5/12/2018 surse de erori - slidepdf.com
http://slidepdf.com/reader/full/surse-de-erori 6/21
Comentarii, observa Ń ii, concluzii :
Prezentarea, mai sus, a unor modalităŃi de verificare a modelelor MEF, desigur că nueste exhaustivă. Fiecare utilizator poate să-şi imagineze şi alte tehnici şi metode deverificare.
Se poate remarca faptul că în lucrarea de faŃă nu s-au făcut nici un fel de menŃiunicantitative privind condiŃiile de precizie cu care se pot sau trebuie verificate modeleMEF. Aceasta nu este o pierdere din vedere ci este rezultatul unei realităŃi şi anume că nu se poate stabili precizia unui model MEF în general, ci toate exigenŃele impusemodelului (inclusiv cele de precizie) depind de particularităŃile concrete, asociateproblemei inginereşti care se rezolvă, ca, de exemplu, tipul structurii, scopul FEA,importanŃa structurii, gradul de pericol în cazul unei avarii, tipul solicitării, durata deexploatare etc.
De asemenea, trebuie avut în vedere faptul că MEF este aproximativă, ceea ce înseamnă că nu se poate cere modelului mai mult decât poate oferi metoda, rezultateleobŃinute fiind determinate atât de performanŃele modelului cât şi de principiile, ipotezeleşi procedurile matematice de calcul incluse în metoda şi în programul cu elemente
finite.Toate verificările făcute modelelor cu elemente finite sunt validate în ultimă
instanŃă de intuiŃia şi experienŃa utilizatorului şi atunci când este posibil,experimental.
SURSE DE ERORI ÎN MODELAREA CU ELEMENTE FINITE
Metoda elementelor finite (MEF) este o metodă aproximativă de calcul. La modelareaşi rezolvarea unei probleme date se fac o serie de aproximări, care au drept consecinŃă faptul că soluŃia obŃinută cu MEF are unele abateri faŃă de soluŃia exactă, necunoscută.Aceste abateri de aproximare se numesc în mod obişnuit erori ale MEF, ceea ce nueste corect. În principiu, conceptul de eroare are sensul de greşeală – intenŃionată sauinvoluntară – şi ea poate fi, de obicei, corectată sau evaluată cantitativ, ceea ce nu estevalabil şi pentru MEF. Pentru problemele care sunt abordate cu MEF nu sunt, de obicei,cunoscute soluŃii alternative, obŃinute pe alte căi, cu care acestea să se compare pentrua se determina abaterile relative. ExistenŃa acestor abateri sau erori de aproximare aleMEF este principalul său dezavantaj şi este tributul plătit pentru calităŃile, avantajele şiperformanŃele sale. În continuare se va folosi pentru aceste abateri termenul, obişnuit,de eroare a MEF .
Sursele de erori de aproximare se află la diverse nivele şi intervin în diverse etapeale procesului de analiză cu elemente finite (FEA). Identificarea şi înŃelegereamecanismelor care guvernează aceste erori face posibilă - uneori şi într-o oarecare
măsură – reducerea şi evaluarea acesora. Cele mai importante dintre sursele de eroriale MEF sunt următoarele (nu se menŃionează greşelile posibile ale utilizatorului,provenite din neştiinŃă, neatenŃie sau incompetenŃă).
Erorile conceptuale sau de principiu provin din neglijarea satisfacerii ipotezelor şiconceptelor care definesc diversele categorii de probleme ale structurilor mecanice,ceea ce poate duce la erori mari ale soluŃiei obŃinute. De exemplu, nu sunt îndepliniteuna sau mai multe dintre ipotezele care delimitează modelul de structură liniarelastică, definită ca mediu continuu, omogen şi izotrop, cu liniaritate geometrică,

5/12/2018 surse de erori - slidepdf.com
http://slidepdf.com/reader/full/surse-de-erori 7/21
elasticitate perfectă, liniaritate fizică şi fără tensiuni iniŃiale. De asemenea, se presupunecă structura este în echilibru (static sau dinamic) şi că este valabil principiul lui SaintVenant, ipoteza secŃiunii plane (pentru bare) şi ipoteza normalei rectilinii (pentru plăci şi învelişuri). În aceste condiŃii, ecuaŃiile de echilibru scrise pentru structura nedeformată rămân valabile şi pentru structura deformată, funcŃiile eforturilor nu depind de deplasări,dependenŃa dintre sarcini şi deplasări este liniară, ecuaŃiile diferenŃiale sunt cu
coeficienŃi constanŃi, este aplicabil principiul suprapunerii efectelor etc.Câteva exemple de situaŃii relativ simple în care nu sunt îndeplinite una sau maimulte dintre ipotezele enumerate pot fi:
- pentru barele de secŃiune necirculară (sau neinelară) solicitate la răsucire nueste valabilă ipoteza secŃiunii plane;
- unele aliaje metalice, unele materiale plastice şi o serie de materiale compozitenu sunt perfect elastice şi nu “ascultă“ de legea lui Hooke, adică nu au liniaritate fizică;
- profilele laminate, dar, mai ales, tablele sunt puternic anizotrope, ca urmare alaminării;
- pentru plăcile plane subŃiri, solicitările din planul plăcii nu sunt decuplate de celeperpendiculare pe acesta, ca urmare a unor deplasări transversale (chiar relativ mici);
- pentru barele cu pereŃi subŃiri nu mai este valabil principiul lui Saint Venant şi
ipoteza secŃiunii plane, deplanările secŃiunilor fiind relativ mari, propagarea acestorafăcându-se pe toată lungimea barei;
- modurile proprii ale vibraŃiilor libere nu sunt decuplate, ca urmare a existen Ńeiamortizărilor;
- existenŃa unei stări de tensiuni iniŃiale importante ca urmare a tehnologiilor deexecuŃie prin sudare, ambutisare, roluire etc.
Aproximarea geometriei structurii reale are loc în procesul de elaborare a modeluluide calcul. Diversele forme geometrice ale structurii date se aproximează pentru camodelul de calcul să fie cât mai simplu şi pentru a se putea realiza pe el reŃeaua dediscretizare.
De exemplu, contururile curbe se aproximează prin poligoane. Cu cât numărul delaturi al poligonului este mai mare, cu atât aproximarea este mai precisă şi erorile vor fimai mici. Dacă configuraŃia geometrică este complicată, atunci este necesar calungimile liniilor drepte cu care se face aproximarea să fie cât mai mici iar numărulacestora cât mai mare.
Pentru exemplificare, se prezintă în figura 10.1 o paletă de turbină (fig. 10.1.a) şimodelul ei spaŃial discretizat cu 9450 noduri şi 5760 elemente de volum, de tip brick, cuopt noduri (fig. 10.1.b).
a. b.Figura 10.1
5/12/2018 surse de erori - slidepdf.com
http://slidepdf.com/reader/full/surse-de-erori 8/21
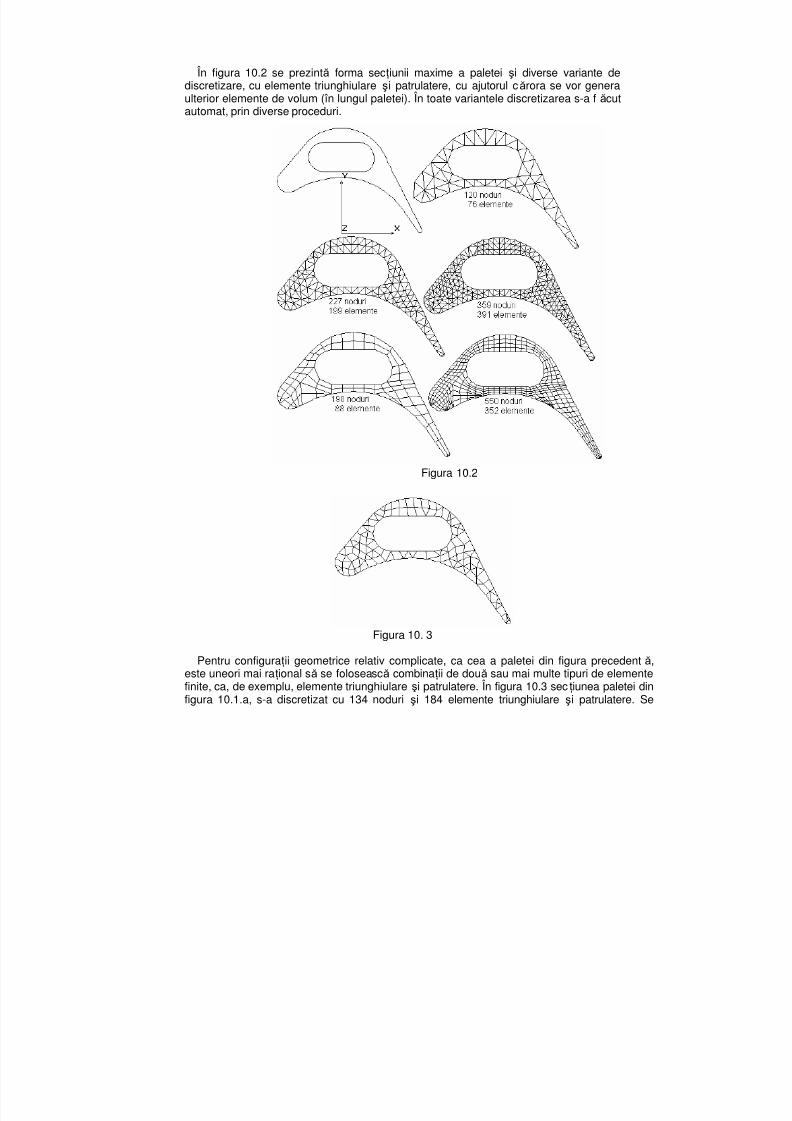
În figura 10.2 se prezintă forma secŃiunii maxime a paletei şi diverse variante dediscretizare, cu elemente triunghiulare şi patrulatere, cu ajutorul cărora se vor generaulterior elemente de volum (în lungul paletei). În toate variantele discretizarea s-a făcutautomat, prin diverse proceduri.
Figura 10.2
Figura 10. 3
Pentru configuraŃii geometrice relativ complicate, ca cea a paletei din figura precedentăeste uneori mai raŃional să se folosească combinaŃii de două sau mai multe tipuri de elementfinite, ca, de exemplu, elemente triunghiulare şi patrulatere. În figura 10.3 secŃiunea paletei difigura 10.1.a, s-a discretizat cu 134 noduri şi 184 elemente triunghiulare şi patrulatere. S
5/12/2018 surse de erori - slidepdf.com
http://slidepdf.com/reader/full/surse-de-erori 9/21
remarcă faptul că deşi numărul de noduri şi elemente este relativ mic, aproximarea geometriesecŃiunii maxime a paletei este foarte bună.
Aproximarea sarcinilor care se aplică modelului se referă la: valorile acestora, modulde variaŃie (pe suprafaŃă, pe volum, în funcŃie de timp etc), direcŃia, poziŃia pe model apunctului de aplicaŃie etc. Se vor avea în vedere variantele de încărcare cerute de
beneficiar şi modalităŃile de evaluare ale regimurilor de încărcare şi anume, sarcininominale, de avarie, de probă, maxime, accidentale etc. De asemenea, sarcinile se potaplica static, dinamic cu o viteză cunoscută, (prin şoc) etc. Încărcarea poate fi staŃionară sau nestaŃionară, variabilă după legi cunoscute sau variabilă aleator. În procesul dedeformare al structurii sarcinile îşi pot modifica direcŃiile sau punctele de aplicaŃie.
În mod obişnuit, pentru simplitate, sarcinile se consideră ca forŃe concentrate,aplicate în nodurile modelului. Diversele tipuri de elemente permit definirea sarcinilorsub forma unor presiuni (de exemplu, presiuni hidrostatice) sau sarcini distribuite pecontur sau pe volum (de exemplu, forŃele de inerŃie). Şi în aceste situaŃii, în final,rezultantele acestora se introduc – de către program – în nodurile elementelor.ConsecinŃa acestui demers este că aplicarea sarcinilor asupra modelului depindede localizarea nodurilor, adică de reŃeaua de discretizare.
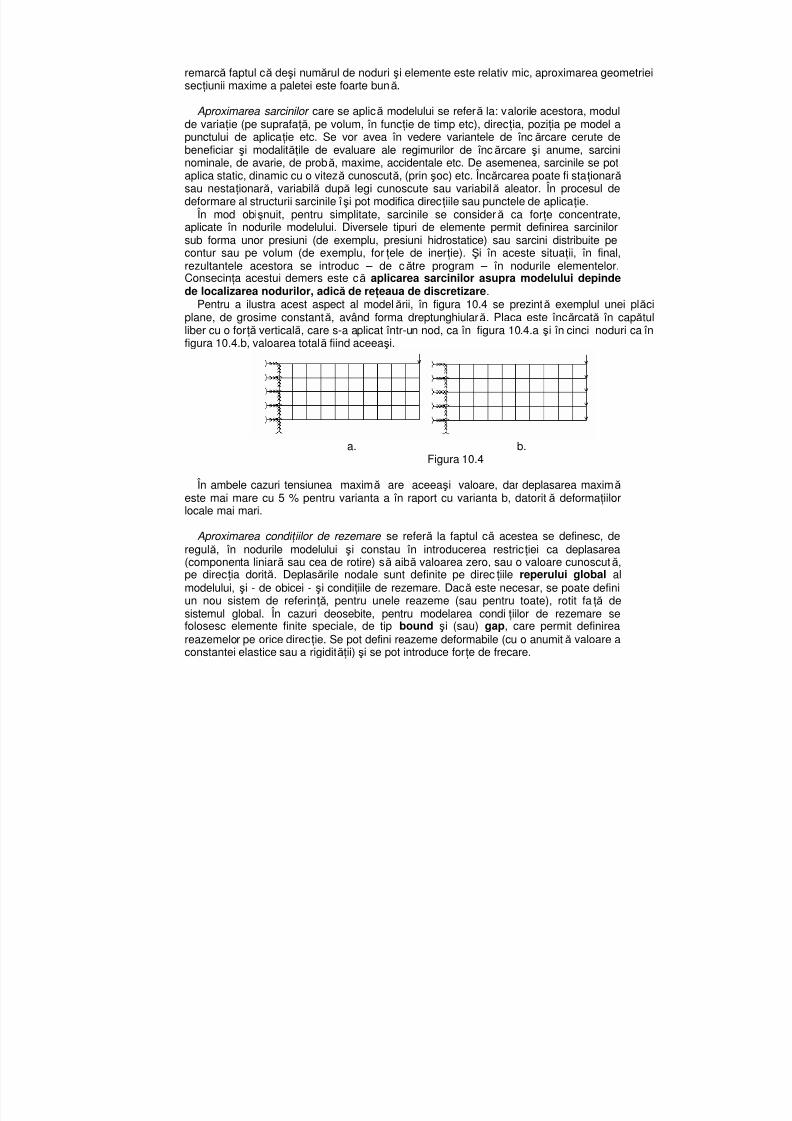
Pentru a ilustra acest aspect al modelării, în figura 10.4 se prezintă exemplul unei plăcplane, de grosime constantă, având forma dreptunghiulară. Placa este încărcată în capătuliber cu o forŃă verticală, care s-a aplicat într-un nod, ca în figura 10.4.a şi în cinci noduri ca îfigura 10.4.b, valoarea totală fiind aceeaşi.
a. b.Figura 10.4
În ambele cazuri tensiunea maximă are aceeaşi valoare, dar deplasarea maximă este mai mare cu 5 % pentru varianta a în raport cu varianta b, datorită deformaŃiilorlocale mai mari.
Aproximarea condi Ń iilor de rezemare se referă la faptul că acestea se definesc, deregulă, în nodurile modelului şi constau în introducerea restricŃiei ca deplasarea(componenta liniară sau cea de rotire) să aibă valoarea zero, sau o valoare cunoscută,pe direcŃia dorită. Deplasările nodale sunt definite pe direcŃiile reperului global almodelului, şi - de obicei - şi condiŃiile de rezemare. Dacă este necesar, se poate defini
un nou sistem de referinŃă, pentru unele reazeme (sau pentru toate), rotit faŃă desistemul global. În cazuri deosebite, pentru modelarea condiŃiilor de rezemare sefolosesc elemente finite speciale, de tip bound şi (sau) gap, care permit definireareazemelor pe orice direcŃie. Se pot defini reazeme deformabile (cu o anumită valoare aconstantei elastice sau a rigidităŃii) şi se pot introduce forŃe de frecare.
5/12/2018 surse de erori - slidepdf.com
http://slidepdf.com/reader/full/surse-de-erori 10/21
Pentru modelarea corectă a reazemelor modelului şi evitarea unei surse de erori la acesdemers al modelării, trebuie cunoscute foarte bine condiŃiile de funcŃionare ale structurii îdiversele regimuri de lucru iar condiŃiile de rezemare să modeleze cât mai bine acestsituaŃii. Pentru exemplificare, în figura 10.5 se prezintă modelul unei structuri din bare care sdeplaseză pe o cale de rulare, pe şinele paralele AB şi CD.
Figura 10.5
S-au definit următoarele condiŃii pentru blocarea deplasărilor celor patru reazeme: A – toate; B – verticală şi transversală; C şi D verticală. În D s-a introdus şi o forŃă defrecare pe direcŃia de rulare pentru a simula situaŃia când funcŃionează doar unul dincele două sisteme care asigură deplasarea structurii pe calea de rulare.
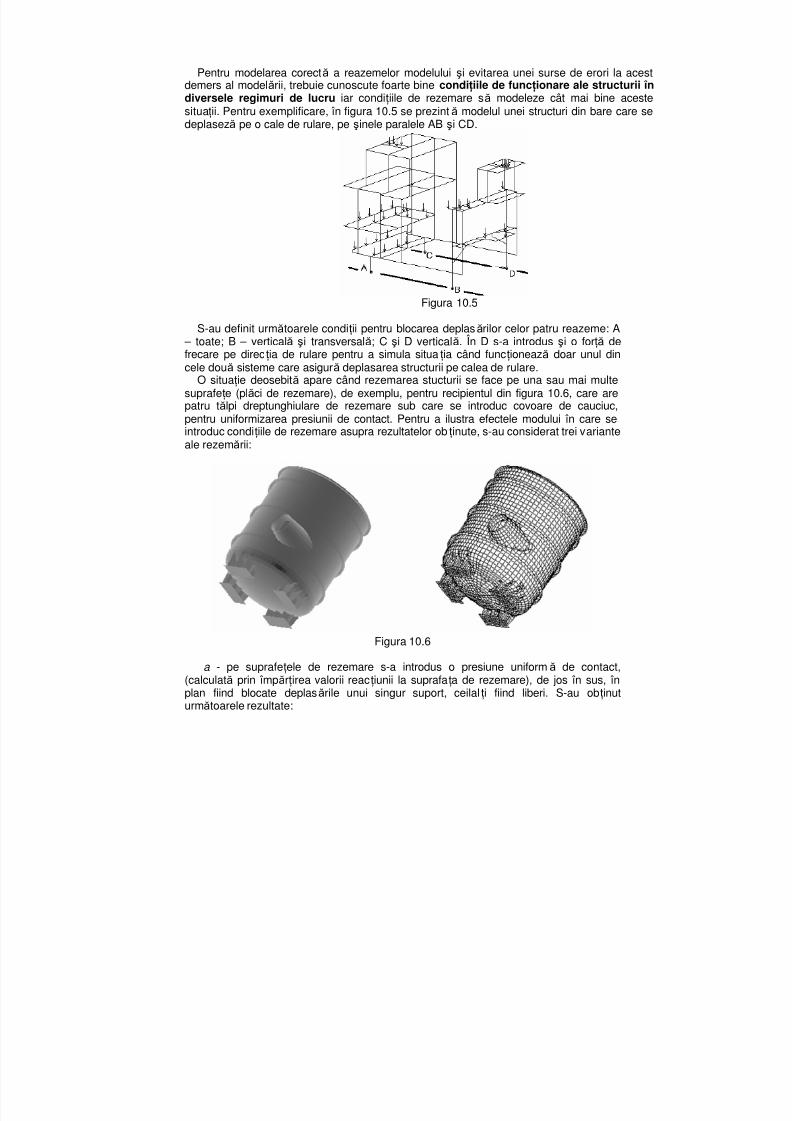
O situaŃie deosebită apare când rezemarea stucturii se face pe una sau mai multesuprafeŃe (plăci de rezemare), de exemplu, pentru recipientul din figura 10.6, care arepatru tălpi dreptunghiulare de rezemare sub care se introduc covoare de cauciuc,pentru uniformizarea presiunii de contact. Pentru a ilustra efectele modului în care seintroduc condiŃiile de rezemare asupra rezultatelor obŃinute, s-au considerat trei varianteale rezemării:
Figura 10.6
a - pe suprafeŃele de rezemare s-a introdus o presiune uniformă de contact,(calculată prin împărŃirea valorii reacŃiunii la suprafaŃa de rezemare), de jos în sus, înplan fiind blocate deplasările unui singur suport, ceilalŃi fiind liberi. S-au obŃinuturmătoarele rezultate:
5/12/2018 surse de erori - slidepdf.com
http://slidepdf.com/reader/full/surse-de-erori 11/21
- deplasarea rezultantă maximă : 10.94 mm;- tensiunea echivalentă maximă von Mises în noduri : 144 N/mm2;- tensiunea echivalentă maximă von Mises în elemente : 115 N/mm2;
b - s-au considerat aceleaşi condiŃii ca la varianta anterioară, dar fără presiune decontact. S-au obŃinut următoarele rezultate:
- deplasarea rezultantă maximă : 10.97 mm;
- tensiunea echivalentă maximă von Mises în noduri : 233 N/mm2
;- tensiunea echivalentă maximă von Mises în elemente : 117 N/mm2;c – s-au blocat în plan deplasările tuturor reazemelelor, fără presiune de contact. S-
au obŃinut următoarele rezultate:- deplasarea rezultantă maximă : 2.29 mm;- tensiunea echivalentă maximă von Mises în noduri : 216 N/mm2;- tensiunea echivalentă maximă von Mises în elemente : 117 N/mm2.
Din analiza rezultatelor prezentate se constată o scădere de 4.79 ori a deplasăriimaxime, între variantele b şi c şi o creştere de 1.62 ori a tensiunii echivalente maximedin noduri, între variantele b şi a . Tensiunea echivalentă maximă din elemente rămânepractic constantă. Trebuie făcută precizarea că determinarea exactă a legii dedistribuŃie a presiunii de contact în reazemele exemplului prezentat implică o analiză
neliniară a problemei. Dacă acest demers se justifică sau nu, depinde de scopulcalculului.
Aproximarea introdus ă de elementul finit utilizat este, probabil, cea mai importantă sursă de erori în MEF, acesta fiind inclusă în principiile fundamentale ale metodei. ÎnesenŃă aproximarea aceasta constă în faptul că pentru un subspaŃiu al structurii reale,pentru care deplasările (şi tensiunile) au o lege de variaŃie oarecare, necunoscută, seutilizează un element finit care are implementată o funcŃie de aproximare prestabilită,specifică tipului de element finit utilizat. Tipurile de elemente disponibile în “bibliotecile”programelor au fost concepute astfel încât să fie cât mai performante şi să ofereutilizatorului posibilitatea satisfacerii unor cerinŃe cât mai diverse, acestuia revenindu-isarcina de a le utiliza corect şi eficient, incluzând şi cerinŃa ca erorile de aproximare să fie cât mai mici. În acest sens utilizatorul trebuie să ştie care sunt principalele cerinŃe şiproprietăŃi ale funcŃiilor de aproximare (denumite şi funcŃii de interpolare) aleelementelor.
Pentru MEF, modelul deplasare, funcŃiile se referă la câmpul deplasărilor. AcestefuncŃii trebuie să asigure energiei potenŃiale totale a structurii deformate o valoareminimă, corespunzătoare stării de echilibru stabil a acesteia, compatibilitatea internă şisatisfacerea condiŃiilor la limită. În acest caz, rezultatele obŃinute prin FEA, pentrumodele cu discretizări tot mai fine, adică având un număr tot mai mare de noduri şi deelemente, conduce la obŃinerea unor rezultate tot mai precise, adică procesul esteconvergent.
Pentru asigurarea convergenŃei FEA, funcŃiile de aproximare trebuie să satisfacă
următorele cerinŃe:a – Continuitatea. Dacă funcŃiile sunt polinoame, se asigură cerinŃa ca îninteriorul elementului şi pe conturul său câmpul deplasărilor să nu aibă discontinuităŃi,salturi, goluri sau variaŃii bruşte;
b – Compatibilitatea sau conformitatea. Trebuie ca în procesul de deformaŃieelementele să rămână solidare în toate punctele frontierei comune, adică să nu sesepare, să nu ducă la goluri sau discontinuităŃi şi să nu pătrundă în domeniulelementelor vecine. Pentru a fi compatibile, elementele adiacente trebuie ca pe linia sausuprafaŃa comună să aibă aceleaşi: coordonate pentru noduri, grade de libertate în
5/12/2018 surse de erori - slidepdf.com
http://slidepdf.com/reader/full/surse-de-erori 12/21
noduri, tip de funcŃii de aproximare pentru deplasări şi (uneori) să fie raportate lasisteme de coordonate locale. În practica FEA, apar frecvent situaŃii în care trebuie“conectate” elemente care nu sunt compatibile. Cel puŃin în zonele din imediataapropiere a acestor linii sau suprafeŃe este de aşteptat ca rezultatele obŃinute să fieafectate de erori.
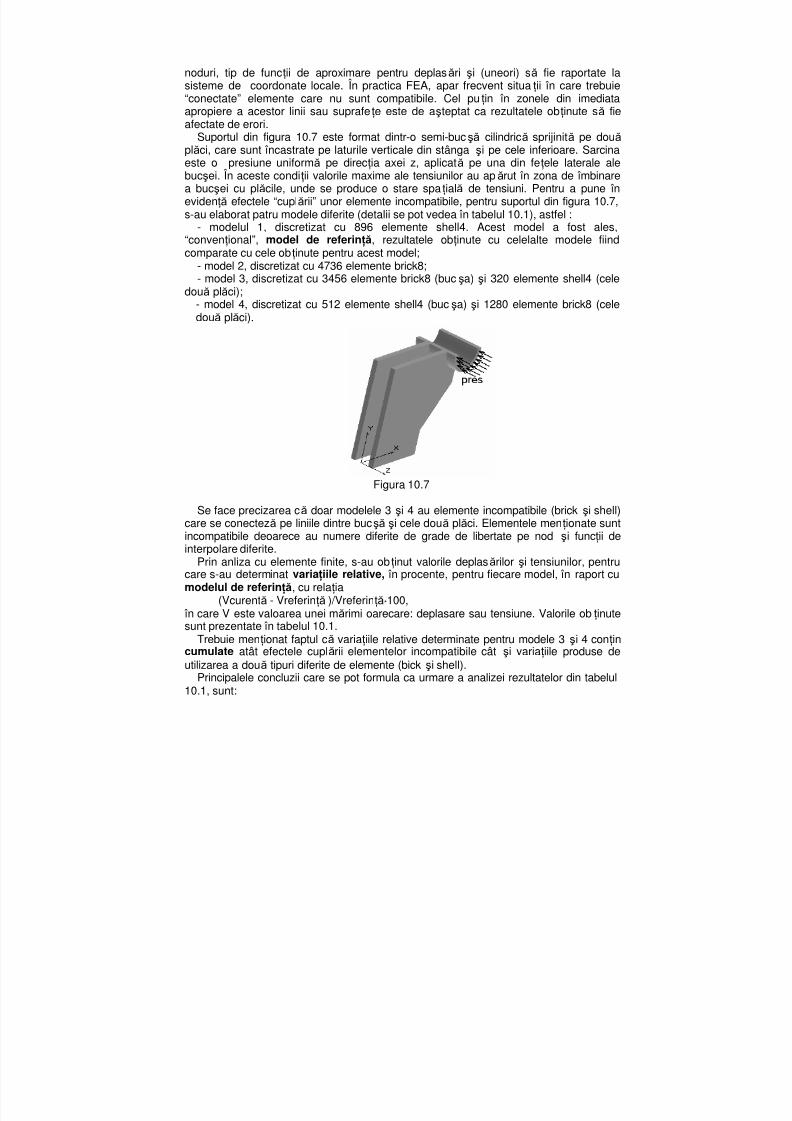
Suportul din figura 10.7 este format dintr-o semi-bucşă cilindrică sprijinită pe două
plăci, care sunt încastrate pe laturile verticale din stânga şi pe cele inferioare. Sarcinaeste o presiune uniformă pe direcŃia axei z, aplicată pe una din feŃele laterale alebucşei. În aceste condiŃii valorile maxime ale tensiunilor au apărut în zona de îmbinarea bucşei cu plăcile, unde se produce o stare spaŃială de tensiuni. Pentru a pune înevidenŃă efectele “cuplării” unor elemente incompatibile, pentru suportul din figura 10.7,s-au elaborat patru modele diferite (detalii se pot vedea în tabelul 10.1), astfel :
- modelul 1, discretizat cu 896 elemente shell4. Acest model a fost ales,“convenŃional”, model de referinŃă, rezultatele obŃinute cu celelalte modele fiindcomparate cu cele obŃinute pentru acest model;
- model 2, discretizat cu 4736 elemente brick8;- model 3, discretizat cu 3456 elemente brick8 (bucşa) şi 320 elemente shell4 (cele
două plăci);
- model 4, discretizat cu 512 elemente shell4 (bucşa) şi 1280 elemente brick8 (celedouă plăci).
Figura 10.7
Se face precizarea că doar modelele 3 şi 4 au elemente incompatibile (brick şi shell)care se conecteză pe liniile dintre bucşă şi cele două plăci. Elementele menŃionate suntincompatibile deoarece au numere diferite de grade de libertate pe nod şi funcŃii deinterpolare diferite.
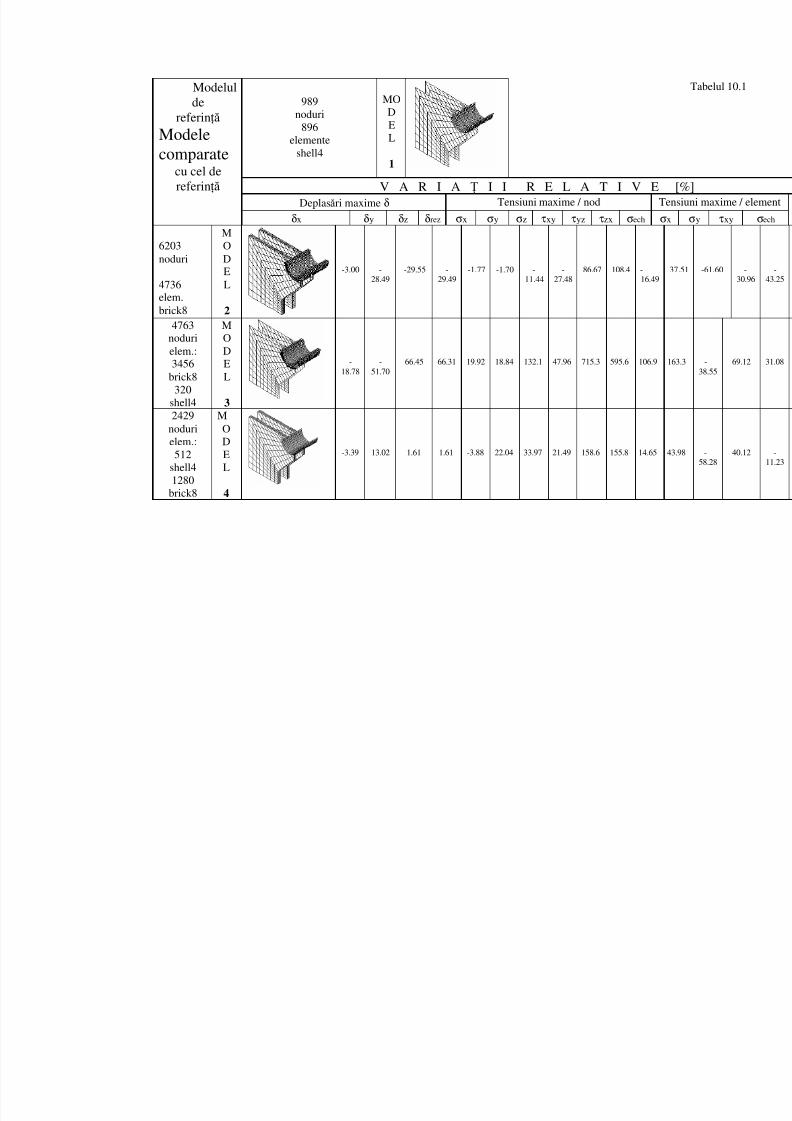
Prin anliza cu elemente finite, s-au obŃinut valorile deplasărilor şi tensiunilor, pentrucare s-au determinat variaŃiile relative, în procente, pentru fiecare model, în raport cumodelul de referinŃă, cu relaŃia
(Vcurentă - VreferinŃă )/VreferinŃă*100, în care V este valoarea unei mărimi oarecare: deplasare sau tensiune. Valorile obŃinutesunt prezentate în tabelul 10.1.
Trebuie menŃionat faptul că variaŃiile relative determinate pentru modele 3 şi 4 conŃincumulate atât efectele cuplării elementelor incompatibile cât şi variaŃiile produse deutilizarea a două tipuri diferite de elemente (bick şi shell).
Principalele concluzii care se pot formula ca urmare a analizei rezultatelor din tabelul10.1, sunt:
5/12/2018 surse de erori - slidepdf.com
http://slidepdf.com/reader/full/surse-de-erori 13/21
- din compararea modelelor 1 şi 2, rezultă variaŃii foarte mari pentru tensiunile τzx , τyz din noduri şi σy pe elemente;
- pentru modelul 3, cu elemente incompatibile, rezultă variaŃii imense pentrutensiunile τyz (715.3%), τzx (595,6 %), σz (132.1 %) din noduri şi σx (163,3 %) dinelemente;- o situaŃie asemănătore este şi pentru modelul 4, dar variaŃiile sunt mai mici.
S-au determinat, în aceeaşi manieră ca cea prezentată mai sus, variaŃiile relativepentru cele 4 modele şi pentru analiza de stabilitate. Considerând tot modelul 1 modelde referinŃă, pentru celelalte trei modele s-au obŃinut următoarele variaŃii relative aleprimelor trei valori proprii de flambaj:
- modelul 2: 53.28 %; 64.68 %; 67.17 %;- modelul 3: 21.70 %; -13.04 %; -13.24 %;- modelul 4: 38.68 %; 37.84 %; 52.74 %.
Trebuie menŃionat faptul că variaŃiile relative ale valorilor factorilor de flambaj dintremodelele 2 şi 1 reprezintă efectul tipului de element şi se vede că variaŃiile sunt destulde mari. Pentru modelele 3 şi 4 variaŃiile relative sunt mai mici (mai ales pentru modelul3) şi ele cumulează efectul conectării elementelor incompatibile şi cel al schimbăriitipului de element.
c – Complinirea. FuncŃiile de aproximare trebuie să conŃină termeni care să descrie deplasările de corp rigid (adică translaŃii uniforme pe toate direcŃiile şi rotaŃii fără distorsiuni unghiulare) şi stările de deformaŃii constante ale elementului, adică să conŃină termeni constanŃi şi termeni de gradul întâi. Dacă, pentru încovoierea plăcilor,gradele de libertate nodale includ curburile plăcii, atunci funcŃiile trebuie să conŃină şitermeni de gradul al doilea, deoarece atunci derivatele de ordinul al doilea trebuie să fieconstante.
Cele mai utilizate şi eficiente tipuri de elemente finite sunt cele izoparametrice, careau polinoame (sau, mai rar, alte tipuri de funcŃii) de acelaşi tip atât pentru definireageometriei elementului (de exemplu laturile unui patrulater) cât şi pentru aproximareacâmpului deplasărilor;
5/12/2018 surse de erori - slidepdf.com
http://slidepdf.com/reader/full/surse-de-erori 14/21
989
noduri896
elementeshell4
MODEL
1
V A R I A ł I I R E L A T I V Deplasări maxime δ Tensiuni maxime / nod
Modelulde
referinŃă
Modele
comparatecu cel dereferinŃă
δx δy δz δrez σx σy σz τxy τyz τzx σech
6203noduri
4736
elem.brick8
MODEL
2
-3.00 -28.49
-29.55 -29.49
-1.77 -1.70 -11.44
-27.48
86.67 108.4 -16
4763nodurielem.:3456
brick8320
shell4
MODEL
3
-18.78
-51.70
66.45 66.31 19.92 18.84 132.1 47.96 715.3 595.6 10
2429nodurielem.:
512shell41280
brick8
MOD
EL
4
-3.39 13.02 1.61 1.61 -3.88 22.04 33.97 21.49 158.6 155.8 14
5/12/2018 surse de erori - slidepdf.com
http://slidepdf.com/reader/full/surse-de-erori 15/21
Tabelul 10.2
D e p l a s ă r i m a x i m e δ Tensiuni echivalent
δresultant δy σech/nod
VARI
ANTA
Numărulde
elemente
Tipul
elementelor
Forma
geometrică a
elementelor Valoare[mm]
VariaŃie[ % ]
Valoare[mm]
VariaŃie[ % ]
Valoare[ N/mm2]
VariaŃie[ % ] [
Normală 0.9244 -0.8907 99.25 61PLANE2D Distorsionată 0.9055
-2.04-0.8726
-2.0399.79
0.546
Normală 0.7776 -0.7513 79.42 52 SHELL4T(gros) Distorsionată 0.7540
-3.03-0.7280
-3.1079.23
- 0.245
Normală 0.9444 -0.9073 92.58 63 Un
patrulater Distorsionată 0.9419
-0.26
-0.9045
-0.31
93.21
0.68
6Normală 0.9406 -0.9035 87.63 64 2
triunghiuri Distorsionată 0.9360-0.49
-0.8988-0.52
87.44- 0.22
6Normală 0.9810 -0.9399 96.27 65 4
triunghiuri Distorsionată 0.9725-0.87
-0.9326-0.78
109.4713.71
6Normală 0.9903 -0.9484 120.18 66
40
elemente
patrulatere
S
HELL4(subŃire)
Poligoanede gradsuperior
Distorsionată 0.9786-1.18
-0.9383-1.05
120.660.40
6
Normală 0.7776 -0.7513 79.42 77TRIANG Distorsionată 0.7540
-3.03-0.7280
-3.1079.23
- 0.247
Normală 0.9444 -0.9073 84.19 78
80elementetriunghiu-
lareSHELL3 sauSHELL4T Distorsionată
0.9419
-0.26
-0.9045
-0.31
85.22
1.22
7
5/12/2018 surse de erori - slidepdf.com
http://slidepdf.com/reader/full/surse-de-erori 16/21
Tabelul 10.3
VariaŃia relativă, în %, a mărimilor, pentru elemente no
Deplasări maxime δ Tensiunimaxime / nod
VA
RIANTA
Tipul
solicitării
SchiŃa bareişi
a încărcării δx δy δz δrez σx σy τxy σech σx
1Întindere
cupresiune
0.02 1.32 ------
0.03 0.63 -0.34 6.45 -0.10 -1.38
2Întinderecu forŃeaxiale
1.58 7.24 ------
1.82 12.80 35.08 60.69 8.41 31.59
3 Încovoierepură -5.38 -6.67 ------
-6.66 5.09 8.22 81.96 5.74 18.64
4Încovoiere
simplă 0.38 -0.31 ------
-0.26 1.14 19.06 9.51 1.22 0.16
5Răsucirecu două
forŃe-----
- ------ 0.14 0.14 -0.04 -0.04 0.00 -0.03 1.92
6
Răsucire
cu unmoment ------
------ 0.13 0.13 5.10 7.81 -0.84 8.87 57.74

5/12/2018 surse de erori - slidepdf.com
http://slidepdf.com/reader/full/surse-de-erori 17/21
d – InvarianŃa geometrică. Elementul finit trebuie să aibă aceeaşi stare dedeformaŃie (sau de tensiune, relaŃia dintre ele fiind linară prin legea lui Hooke) oricare arfi orientarea sistemului local de coordonate (reperul local) în raport cu care aceasta esteformulată. Această cerinŃă are în vedere faptul că în timp ce sistemul global decoordonate (reperul global), al întregii structuri, are o orientare spaŃială fixă, la care suntraportate toate mărimile nodale (deplasări, sarcini, grade de libertate geometrică,
condiŃii de rezemare), fiecare element are propria sa poziŃie şi orientare spaŃială.CerinŃa este satisfăcută dacă expresia funcŃiei de aproximare, prin termenii pe care îiconŃine, nu “favorizează” nici una dintre coordonatele locale.
La elaborarea modelului trebuie luat în considerare faptul că procesul de convergenŃă poate fi atins pe două căi şi anume:
a – utilizarea elementelor de “ordin superior”, care au polinoame de aproximare cugrad cât mai mare. Aceasta presupune ca elementul să aibă un număr mai mare denoduri, cu mai multe grade de libertate geometrică şi o formă geometrică maicomplicată. Privit din punct de vedere informatic acest tip de element este mai eficientdeorece prelucrează o cantitate mai mare de informaŃii. Din păcate, bibliotecile cuelemente finite ale programelor oferă un număr mic de elemente de acest tip;
b – realizarea unei discretizări cât mai fine, adică modelul să aibă un număr cât
mai mare de noduri şi de elemente finite.Practica FEA nu a confirmat superioritatea uneia sau alteia din cele două căi, fiecare
cale dovedind faŃă de cealaltă o mai bună aproximare a soluŃiei pentru unele tipuri deprobleme, dar inferioară pentru altele.
Pentru ca soluŃia obŃinută prin “rafinarea” discretizării să fie o mai bună aproximare aproblemei date, trebuie satisfăcute următorele cerinŃe [1]:
- fiecare dicretizare anterioară trebuie să se “regăsească” în cea nouă;- fiecare punct al modelului trebuie să aparŃină unui element finit;- funcŃiile de aproximare ale elementelor utilizate trebuie să rămână aceleaşi cândse trece de la o reŃea de discretizare la alta.
Figura 10.8Forma distorsionat ă a elementelor finite obŃinute prin discretizare duce la creşterea
erorilor de aproximare. Aceasta înseamnă că, de exemplu, un element triunghiulartrebuie să fie cât mai apropiat de un triunghi echilateral, un element patrulater să fie unpătrat, un element hexaedric de volum să fie un cub, etc. Pentru a analiza practic acestaspect al modelării şi pentru a face şi o evaluare cantitativă a efectului distorsiuniielementelor s-a considerat exemplul unei bare drepte (plăci) din oŃel, cu lungimea de1000 mm, încastrată la un capăt şi liberă la celălalt, cu secŃiunea dreptunghiulară având
5/12/2018 surse de erori - slidepdf.com
http://slidepdf.com/reader/full/surse-de-erori 18/21
înălŃimea de 400 mm şi lăŃimea de 100 mm. Solicitarea s-a realizat cu o forŃă concentrată verticală de 266.7 kN, aplicată în capătul liber al barei.
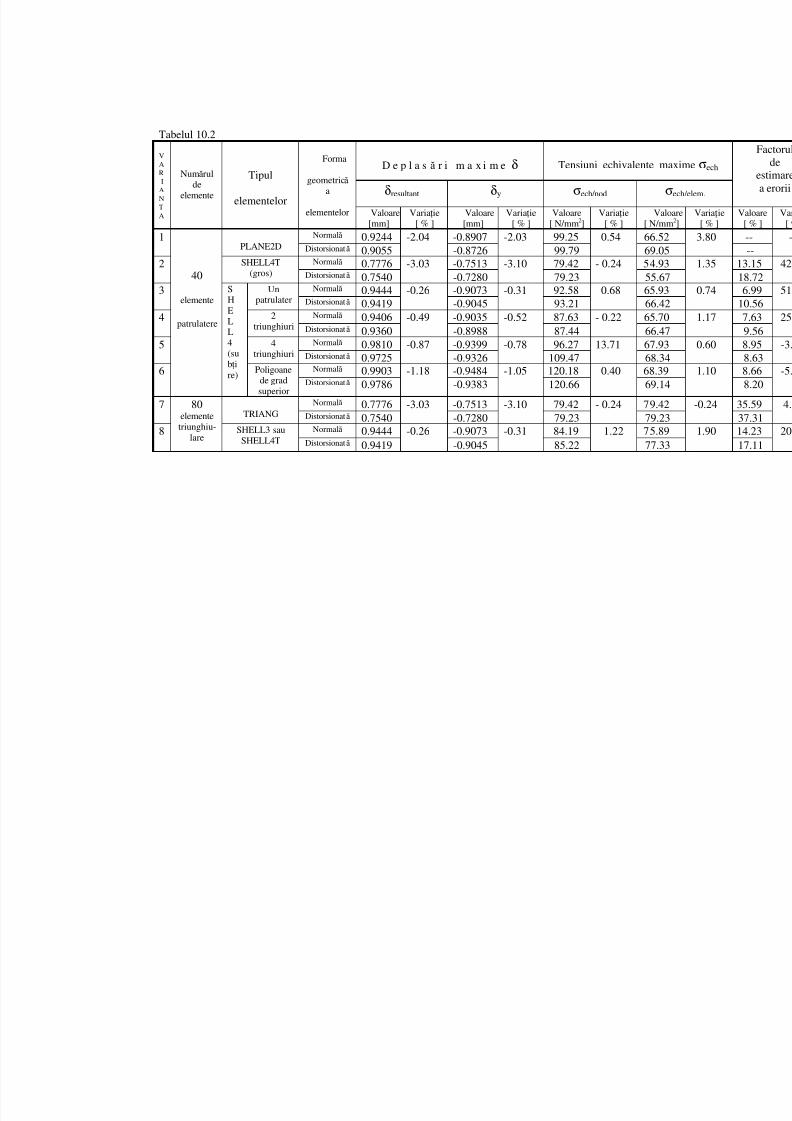
S-a realizat o discretizare cu 55 de noduri şi 40 de elemente nedistorsionate cu patrunoduri (fig. 10.8.a) şi distorsionate (fig. 10.8.b) precum şi cu 80 de elementenedistorsionate cu trei noduri (fig. 10.8.c) şi distorsionate (fig. 10.8.d). Se faceprecizarea că în mod voit s-au realizat dicretizările “fanteziste” din figurile 10.8.b şi
10.8.d pentru a obŃine elemente puternic distorsionate.Pentru a testa “sensibilitatea” diferitelor tipuri de elemente la efectul de distorsiune, s-au realizat opt variante de analiză a modelelor din figura 10.8, pentru fiecare variantă considerând atât elementele normale, nedistorsionate, cât şi cele distorsionate.Rezultatele obŃinute se prezintă în tabelul 10.2. Din analiza acestora se constată că pentru acelaşi model, variaŃia relativă a valorilor maxime ale deplasărilor (rezultantă şipe direcŃia Y) şi ale tensiunilor echivalente von Mises (în noduri şi în elemente) întrevarianta cu elemente normale şi cea cu elemente distorsionate este mică, doar decâteva procente: cea mai mare valoare este de 13.71 %, pentru σech/nod, pentruelementul Shell4, descompus în patru triunghiuri. Pentru factorul de estimare a erorii dediscretizare, variaŃiile sunt mult mai mari, ajungând la 51.07 % pentru modelul cuelemente shell4.
Programele MEF conŃin proceduri de verificare a formei elementelor şi transmitmesaje de atenŃionare pentru cele distorsionate, astfel încât utilizatorul să poată interveni, prin modificarea reŃelei de discretizare, pentru a reduce cât mai mult această eroare de modelare.
Din analiza valorilor prezentate în tabelul 10.2 se constată variaŃii relativ mari alemărimilor calculate în cele 8 variante de modelare, ca urmare a utilizării unor elementede tipuri diferite. Pentru variantele de calcul cu elemente nedistorsionate variaŃiilemaxime ale rezultatelor obŃinute pentru cele 4 modele sunt: 27.35 % pentru δresultant ;26.23 % pentru δy; 51.32 % pentru σech/nod ; 44.58 % pentru σech/element; 409 % pentrufactorul de estimare a erorii de discretizare.
În legătură cu acest factor se semnaleză o “anomalie” a valorilor din tabelul 10.2 şi
anume că pentru variantele de modelare 5 şi 6 s-au obŃinut valori mai mici pentrumodelele cu elemente distorsionate comparativ cu modelele cu elementele normale,nedistorsionate.
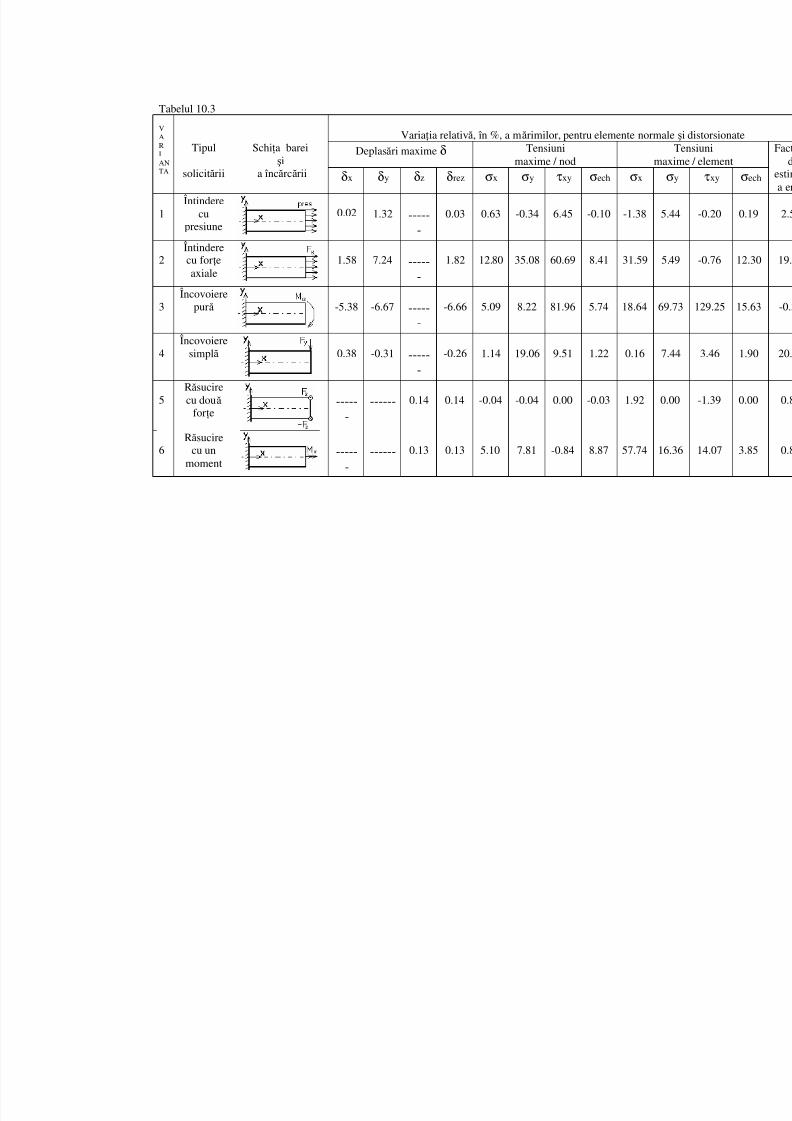
Deoarece efectul distorsionării elementelor depinde şi de configuraŃia stării detensiuni, s-au reluat analizele pentru modelele din figurile 10.8.c şi 10.8.d, discretizatecu elemente shell3 şi s-au considerat 6 variante de încărcare relativ simple, prezentate în tabelul 10.3. S-au calculat variaŃiile relative ale diverselor mărimi pentru modelele cuelemente distorsionate, comparativ cu modelele cu elementele normale,nedistorsionate, considerate ca modele de referinŃă. Cele mai mari variaŃii au fostobŃinute pentru tensiunile τxy, din noduri (81,96 %) şi elemente (129.25 %) pentruvarianta de solicitare de încovoiere pură, (varianta 3) produsă de un moment Miz,aplicat într-un nod. Este “ciudat” faptul că în acest caz factorul de estimare a erorii are
variaŃie relativă negativă, adică valoarea sa este mai mică pentru modelul cu elementedistorsionate, decât pentru modelul normal.Pentru varianta 3 de solicitare - încovoiere simplă produsă de o forŃă concentrată - s-
a făcut şi calculul la flambaj şi pentru primele trei valori proprii s-au obŃinut variaŃii de,respectiv: 0,71 %, -0,16 % şi –0.39 %. Aceste valori sunt foarte mici, deci se poateafirma că flambajul este influenŃat relativ în mică măsură de forma distorsionată aelementelor finite.
5/12/2018 surse de erori - slidepdf.com
http://slidepdf.com/reader/full/surse-de-erori 19/21
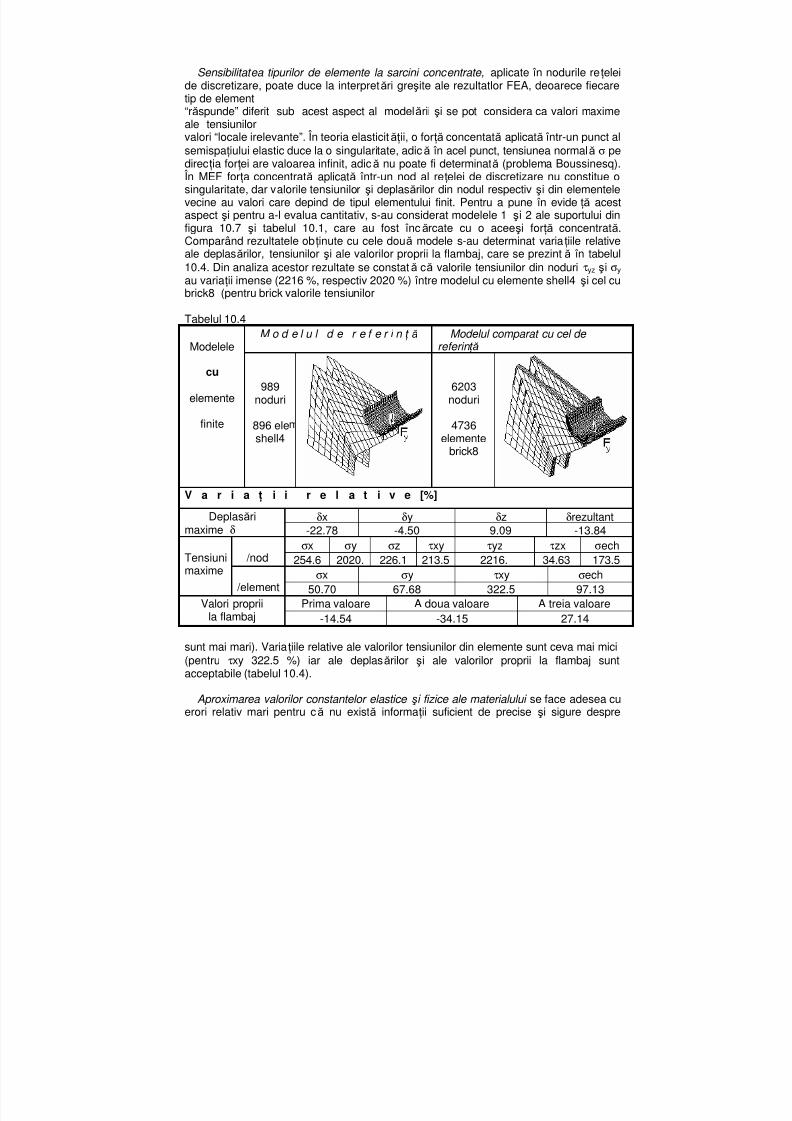
Sensibilitatea tipurilor de elemente la sarcini concentrate, aplicate în nodurile reŃeleide discretizare, poate duce la interpretări greşite ale rezultatlor FEA, deoarece fiecaretip de element“răspunde” diferit sub acest aspect al modelării şi se pot considera ca valori maximeale tensiunilorvalori “locale irelevante”. În teoria elasticităŃii, o forŃă concentată aplicată într-un punct al
semispaŃiului elastic duce la o singularitate, adică în acel punct, tensiunea normală σ pedirecŃia forŃei are valoarea infinit, adică nu poate fi determinată (problema Boussinesq).În MEF forŃa concentrată aplicată într-un nod al reŃelei de discretizare nu constitue osingularitate, dar valorile tensiunilor şi deplasărilor din nodul respectiv şi din elementelevecine au valori care depind de tipul elementului finit. Pentru a pune în evideŃă acestaspect şi pentru a-l evalua cantitativ, s-au considerat modelele 1 şi 2 ale suportului dinfigura 10.7 şi tabelul 10.1, care au fost încărcate cu o aceeşi forŃă concentrată.Comparând rezultatele obŃinute cu cele două modele s-au determinat variaŃiile relativeale deplasărilor, tensiunilor şi ale valorilor proprii la flambaj, care se prezintă în tabelul10.4. Din analiza acestor rezultate se constată că valorile tensiunilor din noduri τyz şi σy au variaŃii imense (2216 %, respectiv 2020 %) între modelul cu elemente shell4 şi cel cubrick8 (pentru brick valorile tensiunilor
Tabelul 10.4M o d e l u l d e r e f e r i n Ń ă Modelul comparat cu cel de
referin Ńă Modelele
cu
elemente
finite
989noduri
896 eleshell4
6203noduri
4736elemente
brick8
V a r i a Ń i i r e l a t i v e [%]
δx δy δz δrezultantDeplasărimaxime δ -22.78 -4.50 9.09 -13.84
σx σy σz τxy τyz τzx σech /nod 254.6 2020. 226.1 213.5 2216. 34.63 173.5
σx σy τxy σech
Tensiunimaxime
/element 50.70 67.68 322.5 97.13
Prima valoare A doua valoare A treia valoareValori propriila flambaj -14.54 -34.15 27.14
sunt mai mari). VariaŃiile relative ale valorilor tensiunilor din elemente sunt ceva mai mici(pentru τxy 322.5 %) iar ale deplasărilor şi ale valorilor proprii la flambaj suntacceptabile (tabelul 10.4).
Aproximarea valorilor constantelor elastice şi fizice ale materialului se face adesea cuerori relativ mari pentru că nu există informaŃii suficient de precise şi sigure despre

5/12/2018 surse de erori - slidepdf.com
http://slidepdf.com/reader/full/surse-de-erori 20/21
structura pentru care se face modelarea. De exemplu, nu se cunoaşte curbacaracteristică reală a materialului, sau variaŃiile constantelor elastice ale unui laminat înraport cu direcŃia de laminare (mai ales pentru table), valorile coeficienŃilor de frecare înreazeme (pentru calculul forŃelor de frecare), valorile factorilor de amortizare şidependenŃa acestora funcŃie de frecvenŃă, constantele de transmisie a căldurii princonductivitate, radiaŃie sau convecŃie, variaŃia constantelor funcŃie de temperatura de
lucru etc. În aceste condiŃii trebuie remarcat faptul că adesea este absurd să se depună eforturi pentru elaborarea unui model sofisticat, cu un mare număr de noduri şielemente, în speranŃa obŃinerii unor rezultate precise, dacă valorile constantelorintroduse în calcul sunt incerte, deorece acestea pot altera semnificativ rezultatele şideci nivelul lor de încredere să fie iluzoriu. Sunt cazuri în care variaŃii relativ mici (decâteva procente) ale valorilor constantelor duc la variaŃii relativ mari ale rezultatelor (de zeci de procente).
Aproximarea maselor şi a distribu Ń iei acestora apare pentru problemele dinamice –vibraŃii libere şi forŃate, răspuns dinamic, răspuns seismic etc. – şi poate duce la eroriimprevizibile, greu de evaluat. Pentru structuri complexe, volumul calculelor pentruprobleme de valori proprii poate deveni foarte mare şi o cale pentru reducerea acestuia
este ca modelul să aibă un număr limitat de grade de libertate, ceea ce implică “reducerea”, sau condensarea matricei de masă şi a celei de rigiditate. Detalii înlegătură cu aceste probleme se prezintă în capitolul 21.
Erorile de trunchiere apar în procesul de calcul ca urmare a faptului că în calculatortoate variabilele (altele decât cele întregi) sunt reprezentate cu un număr finit de cifre.Prin aceasta apar erori care se “cumulează” şi se “propagă” şi pot deveni importantecând volumul operaŃiilor de calcul este foarte mare. Erorile de trunchiere pot afecta înspecial precizia soluŃiei sistemului de ecuaŃii al MEF precum şi celelalte etape de calculale unei FEA. În consecinŃă, sunt programe care au implementate module de calculpentru rezolvarea iterativă a sistemului de ecuaŃii, prin aceasta putându-se “corecta”soluŃia iniŃială până când corecŃia devine mai mică decât un prag prestabilit.
Calculul tensiunilor şi ale altor mărimi “derivate” introduce erori suplimentare deaproximare. Trebuie avut în vedere faptul că, pentru modelul deplasare, deplasărilenodale sunt necunoscutele “primare”, deci primele valori care se obŃin în urma FEA,celelalte fiind mărimi “derivate” din valorile acestora, ceea ce implică operaŃii de calculsuplimentare şi deci şi erori suplimentare de aproximare. Pentru fiecare tip de elementtensiunile se determină altfel, în anumite puncte şi pe anumite direcŃii, acestea fiindopŃiuni ale post-procesării, sau ale “retro-calculului”. Tensiunile în noduri, se calculează ca medii aritmetice ale tensiunilor nodale pentru elementele care se conectează înfiecare nod. Acest fapt trebuie avut în vedere când se fac interpretări ale rezultelorobŃinute prin FEA: care sunt tensiunile care trebuie luate în considerare cele din noduri
sau cele din elemente.Concluzii. Din cele prezentate se poate constata că problema erorilor de aproximare
ale modelării şi analizei cu elemente finite este foarte complexă, ceea ce face aproapeimposibile controlul şi evaluarea acestora. O modalitate de evalua erorile de aproximareconstă în calculul factorului de estimare a erorii, F er, procedură pe care o auimplementată programele actuale pentru FEA. Acest factor se defineşte prin relaŃia(vezi şi relaŃiile (13.28)-(13.33)).

5/12/2018 surse de erori - slidepdf.com
http://slidepdf.com/reader/full/surse-de-erori 21/21
F er = [ E e / ( 2 * E d + E e )] ½* 100 [ % ] ,
în care: E d este energia totală de deformaŃie şi E e energia totală a “erorilor”.Pentru probleme statice, energia totală de deformaŃie E d este egală cu lucrul mecanic
al sarcinilor efectuat pe deplasările corespunzătoare ale punctelor lor de aplicaŃie.Această valoare este aproximativă, deoarece valorile deplasărilor nodale au fost
obŃinute prin FEA, care este aproximativă.În concluzie, factorul de estimare a erorii, F er, pentru o analiză statică cu elementefinite poate fi util doar pentru compararea erorilor de aproximare a două sau mai multevariante ale aceleiaşi FEA, când se modifică discretizarea, tipurile elementelor sau încărcarea. Varianta care are valoarea mai mică a F er este mai precisă, dar nu se poatespune care este abaterea ei faŃă de soluŃia exactă, necunoscută.
Pentru reducerea efectelor erorilor de aproximare nu se pot emite recomandări cuaplicabilitate generală ci fiecare utilizator, de la caz la caz, trebuie să se descurcesingur, pentru a obŃine o soluŃie acceptabilă a modelării şi analizei cu elemente finite.Cunoaşterea surselor de erori şi înŃelegerea mecanismelor lor de “acŃiune” pot fiajutoare preŃioase în demersurile pentru o FEA de succes.
În toate activităŃile inginereşti problemele trebuie formulate în termeni numerici iar
toate aprecierile privind performanŃele de orice fel se susŃin cu valori numerice relative,comparative. În analiza surselor de erori MEF şi FEA prezentată mai sus, s-auprezentat câteva exemple complete tocmai pentru a se putea vedea ordinul de mărimeal efectelor acestor erori, astfel încât cititorul să-şi poată forma o părere corectă,motivată şi deci, temeinică, despre aceste erori de aproximare, care se constituie într-un un aspect fundamental al practicii modelării şi analizei cu elemente finite.