
Strategii de Control Pentru Autovehicule Electrice Hibride
50
1 UNIVERSITATEA TEHNICA “GHEORGHE ASACHI” DIN IAŞI Facultatea de AUTOMATICA SI CALCULATOARE STRATEGII DE CONTROL PENTRU AUTOVEHICULE ELECTRICE HIBRIDE - REZUMATUL TEZEI DE DOCTORAT - Conducător de doctorat: Prof. univ. dr. Alexandru Onea Doctorand: Ing. Cezar Leandru Corneliu Babici IAŞI – 2012 UNIUNEA EUROPEANĂ GUVERNUL ROMÂNIEI MINISTERUL MUNCII, FAMILIEI ŞI PROTECŢIEI SOCIALE AMPOSDRU Fondul Social European POSDRU 2007-2013 Instrumente Structurale 2007-2013 OIPOSDRU UNIVERSITATEA TEHNICĂ “GHEORGHE ASACHI” DIN IAŞI
-
Upload
valentinmuller -
Category
Documents
-
view
143 -
download
13
description
Este prezentată o strategie de control bazată pe gestionarea a două tipuri de propulsoare, şi două tipuri de surse de energie: baterii electrochimice şi supercondensatoare. Deşi ADVISOR este o structură închisă, pentru a schimba strategia originală, s-a desfăcut blocul de control şi blocul bateriilor şi s-a implementat un nou control care gestionează cele două surse.
Transcript of Strategii de Control Pentru Autovehicule Electrice Hibride
1
UNIVERSITATEA TEHNICA “GHEORGHE ASACHI”
DIN IAŞI
Facultatea de AUTOMATICA SI CALCULATOARE
STRATEGII DE CONTROL PENTRU AUTOVEHICULE ELECTRICE HIBRIDE
- REZUMATUL TEZEI DE DOCTORAT -
Conducător de doctorat:
Prof. univ. dr. Alexandru Onea
Doctorand:
Ing. Cezar Leandru Corneliu Babici
IAŞI – 2012
UNIUNEA EUROPEANĂ GUVERNUL ROMÂNIEI
MINISTERUL MUNCII, FAMILIEI ŞI PROTECŢIEI SOCIALE
AMPOSDRU
Fondul Social European
POSDRU 2007-2013
Instrumente Structurale
2007-2013 OIPOSDRU UNIVERSITATEA TEHNICĂ
“GHEORGHE ASACHI” DIN IAŞI
2
Mulţumiri
Această lucrare este rezultatul cercetărilor ştiinţifice efectuate în perioada
septembrie 2009 – septembrie 2012 în domeniul Ingineria Sistemelor, în cadrul
Facultăţii de Automatică şi Calculatoare, Universitatea Tehnică „Gheorghe Asachi”, Iaşi.
Pe parcursul acestor studii doctorale am beneficiat de o bursă prin proiectul
EURODOC, finanţat de Uniunea Europeană. Pe tot parcursul efectuării acestor trei ani,
am avut parte de sprijinul necondiţionat al conducătorului tezei de doctorat, domnul
Prof. dr. ing. Alexandru Onea, căruia doresc să îi mulţumesc pe această cale pentru
toată bunăvoinţa cu care m-a îndrumat în activitatea ştiinţifică şi pentru colaborarea
fructuoasă avută pe parcursul cercetărilor doctorale. De asemenea, doresc să
mulţumesc domnului Prof. dr. ing Radu Iustin Bojoi de la Politecnico Di Torino,
Dipartimento di Ingegneria Elettrica, din Italia pentru posibilitatea efectuării stagiului
extern în cadrul laboratorului de inginerie electrică. Adresez mulţumiri anticipate
membrilor comisiei de analiză a tezei de doctorat şi tuturor specialiştilor care vor avea
amabilitatea şi răbdarea de a citi acest rezumat. Mulţumesc colegilor: mei, din cadrul
departamentului de Automatică şi Calculatoare care prin atmosfera placută m-au
stimulat. Nu în cele din urmă aş dori să mulţumesc mamei şi soţiei mele pentru spijinul
neconditionat şi încrederea acordată pe parcursul celor trei ani de doctorat
UNIUNEA EUROPEANĂ GUVERNUL ROMÂNIEI
MINISTERUL MUNCII, FAMILIEI ŞI PROTECŢIEI SOCIALE
AMPOSDRU
Fondul Social European
POSDRU 2007-2013
Instrumente Structurale
2007-2013 OIPOSDRU UNIVERSITATEA TEHNICĂ
“GHEORGHE ASACHI” DIN IAŞI

3
4
CUPRINS
Capitolul 1 Apariţia Vehiculelor Electrice Hibride…………………………………………….5
1.1 Poluarea aerului mediului înconjurător………………………………………………..5
1.2 Resurse petroliere mondiale…………………………………………………………...5
1.3 Surse de energie pentru transportul rutier……………………………………………..6
1.4 Evoluţia vehiculului electric şi a celui electric hibrid…………………………………8
Capitolul 2 Modelarea autovehiculelor convenţionale………………………………………..10
2.1 Modelarea şasiului…………………………………………………………………...13
2.2 Forţele de rezistenţă ale căii de rulare ………………………………………….........14
2.3 Forţa de tracţiune maximă. Aderenţa pneu-cale de rulare …………………………..18
2.4 Modelarea lanţului de transmisie a puterii…………………………………………...19
2.5 Caracteristica de tracţiune a vehiculului……………………………………………..26
2.5.1Elemente de dimensionare a cutiei de viteze……………………………27
Capitolul 3 Performanţe dinamice ale autovehiculelor………………………………………..30
3.1 Capacitatea de ascensiune.……………………………………………………….31
3.2 Performanţele de acceleraţie.…………………………………………………….32
3.3 Performanţe de frânare …………………………………………………………..34
Capitolul 4 Sisteme de propulsie bazate pe motoare termice ………………………………...38
4.1 Parametrii de funcţionare …….…………………………………………………..39
4.2 Randamentul mecanic al motorului termic……….………………………………40
4.3 Parametri de performanţă ai motoarelor termice ………………………………...42
4.4 Mijloace de creştere a randamentului energetic „rezervor→vehicul” …………..47
Capitolul 5 Vehicule electrice…………………………..……………………………………..50
5.1 Baterii utilizate în arhitecturi electrice și electrice hibride …………………….. 54
Capitolul 6 Vehicule electrice hibride………………….……………………………………..61
6.1 Trenul de acţionare electric hibride………………………………………..…….61
6.2. Arhitecturi ale autovehiculelor electrice hibride………………………………...64
6.2.1 Arhitectura serie……………………………………………………….…65
6.2.2 Arhitectura de tip paralel…………………………………………………66
6.2.3 Arhitectura mixta(serie-paralel)…………………….……………………73
Capitolul 7 Metode pentru analiza vehiculelor electrice hibride …………………………76
7.1 Simulările off-line............………………………………………………………..76
7.2 Simulările on-line………………………………………………………………...76
7.3 Pachetul software pentru simularea autovehiculelor-ADVISOR……….………..79
7.3.1 Modelarea trenului de acţionare……..………………………………….82
7.3.2 Modelarea motorului de tracţiune. ……….…………………………….86
7.3.3 Modelul motorului termic ……………………………………...………89
7.3.4 Modelul generatorului folosit în arhitectura serie……………………...89
7.3.5 Modelul bateriilor utilizate în arhitecturi hibride…….…………………90
5
7.3.6 Modele de cicluri de drum……………………………………………...94
7.4 Comparaţie între diferite arhitecturi……………………………………………...95
7.5 Concluzii………………………………………………………………………..100
Capitolul 8 Strategii de control ale HEV…………………………………………………101
8.1 Clasificarea strategiilor de control ale HEV……………………………………101 8.2 Strategii bazate pe reguli …………………………………………………...…..105
8.2.1 Strategia de control tip „termostat” ………………………………......106
8.2.2 Strategia de control Power Follower………………………………….106
8.3 Strategii bazate pe logica fuzzy…………………………………………………107
8.4 Strategii de control bazate pe optimizare……………………………………….108
8.4.1 Minimizarea consumului de combustibil echivalent………………….109
Capitolul 9 Strategia de control a HEV, având supercapacitori………………………….112
9.1 Rezultate experimentale………………………………………………………...118
9.2 Concluzii………………………………………………………………………..120
Capitolul 10 Strategia de control a HEV paralel bazată pe reguli………………………..121
10.1 Rezultate experimentale ………………………………………………………124
Capitolul 11 Strategia de control a HEV paralel bazată pe control distribuit…..……….126
11.1 Rezultate experimentale………………………………………………………130
Capitolul 12 Strategia de control a HEV pe baza metodei de programare dinamică…….131
12.1 Rezultate experimentale….……………………………………………………134
.......... Capitolul 13 Contribuţii şi diseminarea rezultatelor…………………………………….136
Bibliografie……………………………………………………………………………..139
6
Capitolul 1 Apariția Vehiculelor Electrice Hibride
1.1 Poluarea aerului mediului înconjurător
Pentru a obţine energia de propulsie, în prezent, cea mai mare parte a vehiculelor se
bazează pe arderea combustibililor pe bază de hidrocarburi. Acest fenomen (combustia)
reprezintă o reacţie între combustibil şi aer cu degajare de căldură şi produşi de ardere. Căldura
este transformata în putere mecanică de motorul termic drept urmare în atmosfera sunt eliberati
produşii de ardere. Reacţia din care în urma arderii se obţine numai căldură, bioxid de carbon
(CO2) şi apă (H2O), reprezint reacţia completă (ideală), deoarece produşii rezultati nu dăunează
mediului înconjurător. În mod real, arderea combustibilului pe bază de hidrocarburi nu se
realizează niciodată complet, totodată rezultând şi o anumită cantitate de oxizi de azot (NOx) şi
hidrocarburi nearse (HC), pe lângă CO2 şi H2O, toate acestea fiind toxice pentru sănătatea
oamenilor.
1.2 Resursele petroliere mondiale
Majoritatea combustibililor utilizaţi pentru transport sunt combustibilii lichizi obţinuţi din
petrol. Estimarea totală a rezervelor Pamantului este problematică și din motive politice și
economice. Volumul descoperirilor viitoare de petrol este ipotetic iar noile descoperiri nu vor fi
uşor accesibile. O creştere considerabilă a consumului de combustibil este direct influenţată de
dezvoltarea rapidă a unor ţări masiv populate, în special în regiunea Asia-Pacific. Cea mai rapidă
creştere este în Asia-Pacific unde trăieşte cea mai mare parte a populaţiei. Explozia de consum
de petrol, va duce automat la o creştere proporţională în emisii de poluanţi şi CO2.
1.3. Surse de energie pentru transportul rutier
Încă nu se poate face o estimare a perioadei de posibil consum a petrolui existent
deoarece aceasta depinde de descoperirea a noi zăcăminte de petrol şi de producţia totală a
acestuia. S-a demonstrat statistic faptul că în ultimii ani ritmul de descoperire de noi zăcăminte
de petrol este lent, spre deosebire de consum care are un ritm alert de creştere. Dacă descoperirile
de zăcăminte şi consumul urmează tendinţele actuale atunci resursele de petrol se vor epuiza în
jurul anului 2038.
1.4. Evoluţia vehiculului electric și a celui electric hibrid
Vehiculul electric a fost inventat în 1834. Datorită limitărilor associate bateriilor și
evoluţiei rapide în cazul vehiculelor cu motoare cu ardere internă, vehiculele electrice aproape au
dispărut de pe scena încă din anul 1930. Cu toate acestea, la începutul anilor 1970, unele ţări,
aflate în plină criză energetică, au reluat interesul pentru vehiculul electric. În 1898, germanul
Dr. Ferdinand Porsche şi-a construit prima maşină, the Lohner Electric Chaise. A fost prima
maşină din lume cu acţionare pe roata din faţă. A doua maşină a germanului, a fost un hibrid,
utilizând un motor cu ardere internă pentru a învârti un generator ce a furnizat putere pentru
motoarele electrice aflate în butucii roţilor. Utilizând doar sistemul de baterii, maşina a putut
merge aproape 40 de mile. În primi ani ai secolului 20, mii de maşini electrice şi hibride au fost
produse. Lumea a luat o nouă întorsătură în 1997 când prima maşină electrică hibridă modernă,

7
Toyota Prius a fost vândută în Japonia. Doi ani mai târziu în Statele Unite a apărut primul
vehicul hibrid Honda Insight. Aceste două vehicule, urmate de Honda Civic Hibrid, au marcat o
schimbare radicală în tipul maşinii oferite publicului.
Capitolul 2. Modelarea autovehiculelor convenționale
Utilizarea unui sistem de coordonate tridimensionale este ideal pentru a realiza descrierea
autovehiculului. Acesta este fixat de sol (F), şi orientat astfel încât forţa gravitaţională să fie
perpendiculară planului xFzF. Pe de altă parte, se poate folosi şi un sistem de coordonate mobil,
solidar cu vehiculul, planul xTzT fiind tangenţial (T) căii de rulare [1]. Noul sistem de referinţă
are aceeaşi direcţie zT ca şi referenţialul fix, zF, dar direcţiile xT şi yT se modifică continuu în
funcţie de panta carosabilului. O cale de rulare curbată va împrima vehiculului forţe centrifuge,
determinând solicitări mecanice laterale. Atunci când se dorește simularea dinamicii unui vehicul
care rulează pe o şosea, forţele laterale care acţionează asupra vehiculului pot fi, în general,
neglijate. Daca ţinem seama numai de deplasări pe şosele care nu implică schimbarea direcţiei de
mişcare (mișcări în planul xFyF) atunci, aplicând legea a II-a a mișcării în referenţialul mobil
asociat centrului de greutate al vehiculului, se obţine:
dt
dvMF xT
vxT
(1)
dt
dvMF
yT
vyT (2)
0dt
dvMF zT
vzT (3)
Pentru a modela dinamica sistemului vehicular se impune modelarea simplificată a
componentelor autovehiculului, adică a şasiului autovehiculului şi a liniei de acţionare a acestuia.
Prin intermediul modelului şasiului pot fi evaluate forţele rezistente care se opun mișcării, şi
care, sumate, constituie forţa de rezistenţă la rulare.
2.1 Modelarea şasiului
Ecuaţia dinamică a mișcării vehiculului în direcţia tangenţială poate fi dedusă cu ajutorul
ecuaţiei (1) sub forma:
v
rulare_rezistentat
M
FFa
dt
dv
…..(4)
unde δ reprezintă coeficientul de influenţă al maselor în rotaţie, care ia în considerare creşterea
aparentă a masei vehiculului, datorată maselor rotitoare din sistem. Valorile tipice ale lui δ sunt
în plaja [1.04,1.10]. Viteza autovehiculului poate fi determinată printr-o integrare ordinară a
acceleraţiei rezultate:
t
t
0
0
d)(a)t(v)t(v
(5)

8
2.2 Forţele de rezistenţă ale căii de rulare
Forţa generată ca rezultat al pantei căii de rulare este de forma
singMF vx (6)
unde g reprezintă acceleraţia gravitaţională iar
100
pantaarctg (7)
În mod uzual, forţa de rezistenţă aerodinamică este descrisă ca o funcţie proporţională cu
pătratul vitezei:
2
dfDaerdaer vAC2
1)vsgn(F (8)
unde vantd vvv , vvânt - viteza de deplasare a vântului, CD – coeficientul de rezistenţă
aerodinamică, Af - suprafaţa frontală echivalentă a vehiculului.
Deplasarea spre partea frontală a cauciucului are ca efect creşterea presiunii în această
zonă. În acest caz greutatea din roată şi forţa normală a şoselei sunt nealiniate, generând un cuplu
care se opune mișcării.
aFT yr (9)
yr
d
yr FCr
aFF (10)
unde Cr reprezintă coeficientul rezistenţei la rostogolire. Forţa de rezistenţă la rostogolire, Fr, este
proporţională cu forţa normală care acţionează asupra roţilor, Fy. Aceasta înseamnă că forţa de
rezistenţă la rulare nu este aceeaşi pe toate roţile vehiculului fapt care duce la o distribuţiei
neuniformă a greutăţii acestuia.
2.3 Forţa de tracţiune maximă. Aderenţa pneu-cale de rulare
Pentru a putea stabili forţa de tracţiune maximă care poate fi dezvoltată la suprafaţa de
contact pneu-cale de rulare vom utiliza forţele normale şi al coeficientului de aderenţă, μ. În
cazul unei punţi motoare faţă, forţa de tracţiune are forma:
yfmaxt FF
(11)
Rezultatele experimentale arată că, pe diferite căi de rulare, forţa de tracţiune maximă se
dezvoltă foarte aproape de momentul debutului patinării roţii.
Alunecarea (patinarea) se defineşte uzual cu relaţia:
)r
v1(s
dw (12)
unde v este viteza liniară de deplasare a butucului roţii, ωw este viteza unghiulară a pneului iar rd
este raza efectivă a roţii.. Pentru regimul de frânare alunecarea se defineşte sub forma:
)v
r1(s dw
(13)
care are tot o valoare pozitivă subunitară, similar regimului de tracţiune.

9
În concluzie, pentru o conducere adecvată, valoarea alunecării trebuie limitată în plaja
15÷20%.
2.4. Modelarea lanţului de transmisie a puterii
Componentele unui tren de acţionare sunt: sistemul de propulsie, ambreiaj (în cazul unei
cutii de viteze manuală) sau convertorul de cuplu (în cazul unei cutii de viteze automată), cutia
de viteze, angrenajul central sau principal format din grupul conic şi diferenţialul, arborii
planetari şi roţile motoare. Legătura dintre cuplul de tracţiune, furnizat de linia de acţionare, şi
forţa de tracţiune, care ia naştere la punctul de contact dintre roţile motoare și calea de rulare, se
poate stabili folosind relaţia puterii mecanice:
vFTP pneu_twwm
(14)
Propulsorul este controlat de catre șofer prin intermediul pedalei de acceleraţie. Scopul
modelării lanţului de transmisie a puterii este de a surprinde cele mai importante efecte fizice
care pot explica oscilaţiile în viteza măsurată a propulsorului, a cutiei de viteze şi a roţilor
vehiculului. Propulsorul, definit de propriul moment de inerţie, pJ , este caracterizat de cuplul de
acţionare dezvoltat Tacţ_p, cuplul intern de frecare Tfrec-p, şi sarcina externă de la ambreiaj Tamb.
ambpfrecp_act
p
p TTTdt
dJ
(15)
Dacă se consideră raportul de transmisie icv atunci modelul asociat este
cvcvamb i (16)
apcvcvcvcvcv
cv TDiTdt
dJ
(17)
Se obţine astfel:
cvcvcvambcvcvambcvfreccvap i,i,i,T,TfT (18)
Deşi arborele cardanic (când există) este un element elastic, pentru simplificarea
modelului, acesta poate fi asimilat cu un arbore rigid. În consecinţă viteza unghiulară este aceeaşi
de-a lungul axului, adică:
cvap (19)
apdif TT (20)
Randamentul mecanic total al liniei de acţionare, ηt, este obţinut ca produs al
randamentelor componentelor interpuse între propulsor şi roţile motoare:
roatadifcvambpt (21)
2.5. Caracteristica de tracţiune a vehiculului
În aplicaţiile de tracţiune, caracteristica de performanţă ideală a sistemului de propulsie este
reprezentată de funcţionarea la putere de ieşire constantă, în toată gama sa de viteze.
constTP ppm (22)
Acest lucru înseamnă că trebuie dezvoltat un cuplu care variază invers proporţional cu viteza.

10
pp
mp
constPT
(23)
Capitolul 3. Performanţele dinamice ale vehiculelor
Comportarea dinamică a unui autovehicul, poate fi apreciată prin performanţele pe care
acesta le poate realiza în exploatare: viteza maximă de croazieră; capacitatea de accelerare la
pornirea de pe loc; capacitatea de ascensiune (de urcare a pantelor); capacitatea de frânare.
3.1 Capacitatea de ascensiune
Pentru situaţiile în care vehiculul se deplasează pe o cale de rulare rectilinie cu o pantă relativ
mică şi viteză constantă, echilibrul dintre forţa de tracţiune şi forţa de rezistenţă la rulare poate fi
exprimat sub forma:
gM)vCC( vAC2
1gM
cosgM)vCC( vAC2
1singM
r
Tii
v1r0r
2
fDaerv
v1r0r
2
fDaerv
d
pdifcvt
(1)
În acest caz (sin α ≈ α, cos α ≈1) se obţine:
cdgM
gM)vCC( vAC2
1
r
Tii
v
v1r0r
2
fDaer
d
pdifcvt
(2)
unde:
gM
FFd
v
aert
(3)
termen adimensional, se numeşte factor de performanţă
)vCC(c 1r0r (4)
Atunci când vehiculul se deplasează pe o cale de rulare cu pantă mare, în baza notaţiilor
(11)-(12), ecuaţia (10) devine:
coscdsin (5)
Prin rezolvarea ecuaţiei se obţine:
2
22
c1
dc1cdsin
(6)
3.2 Performanţele de acceleraţie
Pentru a evalua aceste performanţe se pot utiliza mai mulţi indicatori, cum ar fi:
acceleraţia; timpul de acceleraţie; spaţiul de demarare. Pentru determinarea valori
acceleraţiei se poate utiliza ecuaţia de echilibru dinamic (1), adică:
11
)cd(g
M
gM)vCC( -vAC2
1
r
Tii
M
FF
dt
dva
v
v1r0r
2
fDaer
d
pdifcvt
v
rulare_rezistentat
(7)
Exprimarea analitică a timpului de demarare se poate realiza, în baza ecuaţiei (15), sub forma:
dvgM)vCC( -vAC5.0r/)Tii(
Mddv
)cd(ga
dvdt
2
1
a v
v v1r0r
2
fDaerdpdifcvt
v
t
0
(8)
Se obţine:
dvgM)vCC( -vAC5.0r/)Tii(
Mt
2
1
v
v v1r0r
2
fDaerdpdifcvt
va
(9)
Spaţiul de acceleraţie (de demarare) care se defineşte ca fiind distanţa parcursă de vehicul când
viteza se măreşte de la valoarea v1 la valoarea v2 pe durata timpului de acceleraţie [1].
dvgM)vCC( -vAC5.0r/)Tii(
vMdv
a
vd)(vS
2
1
1
1
a v
v v1r0r
2
fDaerdpdifcvt
v
v
v
t
0
a
(10)
3.3 Performanţe de frânare
Ecuaţia de mișcare a vehiculului aflat în regim de frânare este:
v
t_franare
v
rulare_rezistentafranare
M
F
M
FFa
dt
dv
(11)
Valoarea deceleraţiei maxime, pentru cazul în care sunt frânate simultan roţile de la ambele
punţi, este determinată pentru momentul în care roţile ajung simultan la limita de aderenţă. În
acest caz se obţine:
v
rulare_rezistentav
v
rulare_rezistentayryf
M
FcosgM)s(
M
F)FF)(s(
dt
dv
(12)
)gM
Fsincos)vCC)s(((
g
dt
dv
v
aer1r0r
(13)
În situaţia în care roţile punţii faţă sunt frânate iar cele ale punţii spate încă rulează liber,
deceleraţia maximă este dependentă şi de parametri constructivi ai vehiculului. Pentru acest caz
ecuaţia (13) devine:

12
)dt
dv
gL
h)s()
L
h)s(1(
gM
Fsin)
L
h)s(1(cos))vCC(
L
L)s(((
g
)cos)vCC(gM
Fsin))
dt
dv
ggM
F(sin
L
hcos
L
L)(s((
g
M
F))dt
dvMFsingM(
L
hcosgM
L
L)(s(
M
FF)s(
dt
dv
gg
v
aerg
1r0rb
1r0r
v
aer
v
aergb
v
rulare_rezistentavaerv
g
vb
v
rulare_rezistentayf
(14)
Timpul şi spaţiul de frânare:
dvvAC5.0)sincos)vCC)s(((gM
Mt
1
2
v
v
2
fDaer1r0rv
vd
(15)
De asemenea, spaţiul de frânare poate fi calculat sub forma:
dvvAC5.0)sincos)vCC)s(((gM
vMdv
a
vd)(vS
1
2
1
1
d v
v
2
fDaer1r0rv
v
v
v
t
0
d
(16)
Capitolul 4. Sisteme de propulsie bazate pe motoare termice
4.1. Parametrii de funcţionare
Cei mai importanţi parametri pentru performanţele motorului sunt:
Puterea nominală maximă: Puterea cea mai mare pe care un motor termic poate să o dezvolte
pentru o perioadă scurtă de funcţionare.
Puterea nominală normală: Puterea cea mai mare pe care un motor termic poate să o dezvolte
în regim permanent de funcţionare.
Viteza nominală: Viteza de rotaţie a arborelui cotit la care motorul termic dezvoltă puterea
nominală normală.
Pentru aplicaţiile de tracţiune, performanţele motorului termic sunt mai bine precizate prin:
Puterea maximă (sau cuplul maxim) disponibilă la fiecare viteză din plaja de funcţionare a
motorului termic.
Plaja de viteză şi puterea pentru care funcţionarea motorului termic este acceptabilă.
4.2. Randamentul mecanic al motorului termic
Randamentul mecanic al motorului termic se poate determina cu relaţia:
p
p_frec
p
ambM
P
P1
P
P
(1)
Pentru a testa motoarele termice, consumul de combustibil este măsurat cu ajutorul
debitului masic de combustibil (raportul dintre cantitatea de combustibil şi timpul de consum):
dt
dmm f
f (2)
13
Un parametru metric mult mai util îl reprezintă consumul specific de combustibil (sfc-
specific fuel consumption), definit ca raportul dintre debitul masic de combustibil şi puterea utilă
la ieşire:
]kW[P
]h/g[m]kWh/g[sfc f
(3)
unde P reprezintă puterea motorului.
Randamentul termic se defineşte ca raportul dintre lucrul mecanic produs într-un ciclu şi
energia cantităţii de combustibil furnizat într-un ciclu:
ffff
cT
Hm
P
Hm
W
(4)
unde Hf, energia specifică inferioară a combustibilului utilizat. Randamentul termic mai poate fi
exprimat şi sub forma:
f
THsfc
1 (5)
4.3. Parametri de performanţă ai motoarelor termice
Importanţa parametrilor definiţi mai sus devine evidentă atunci când mărimile mecanice
ale motorului termic (putere, cuplu, presiune efectivă medie) sunt exprimate cu ajutorul acestora.
Pentru putere se obţine:
p
i,aerfdVT
)F/A(2
HVP
(6)
Pentru cuplu
)F/A(4
HVT i,aerfdVT
(7)
Pentru presiunea efectivă medie
)F/A(
Hmep i,aerfVT
(8)
Aceste relaţii ilustrează importanţa directă asupra performanţelor motorului termic cu
privire la: randamentul ridicat al conversiei combustibilului; randamentul volumetric ridicat;
creşterea puterii de ieşire pentru un motor termic de dimensiune dată (deplasament) prin
creşterea densităţii aerului din sistemul de aspiraţie; raportul minim aer/combustibil care poate fi
ars în mod util în camera de ardere. Din punct de vedere practic, parametrii de performanţă ai
motoarelor termice care prezintă interes sunt puterea, cuplul, consumul specific de combustibil şi
emisiile specifice. Puterea unui motor cu benzină poate fi exprimată şi sub forma:
4
SAmepP
pp (9)
unde Ap este aria capului de piston iar Sp este viteza medie a pistonului. Pentru cuplu se obţine:
4
VmepT d
p (10)
14
4.4. Mijloace de creştere a randamentului energetic „rezervor→vehicul”
Pentru reducerea consumului total de energie pentru vehiculele rutiere există trei posibile
abordări: îmbunătăţirea randamentului „sondă→rezervor” prin optimizarea proceselor din
centrale şi rafinării şi prin utilizarea surselor de energie primară alternativă; îmbunătăţirea
randamentului „rezervor→vehicul”; îmbunătăţirea randamentului „vehicul→şosea” prin
reducerea masei vehiculului şi a pierderilor la rostogolire şi aerodinamice. Pentru ameliorarea
randamentului energetic „rezervor→vehicul” sunt remarcabile trei abordări la nivel de
componente şi două abordări la nivel de sistem, adică: Îmbunătăţirea randamentului maxim al
componentelor trenului de putere; Îmbunătăţirea randamentului de subîncărcare al
componentelor trenului de putere; Adăugarea capacităţii de recuperare a energiei cinetice şi
potenţiale înmagazinată în vehicul; Optimizarea structurii şi parametrilor sistemului de propulsie,
presupunându-se că parametrii vehiculului şi carburanţii sunt prestabiliţi; Realizarea de algoritmi
de supervizare care valorifică avantajele oferite de configuraţia sistemului de propulsie ales.
Cap.5 Vehicule electrice
Vehiculele electrice utilizează drept sistem de propulsie un motor electric având în
general ca sursă de energie un pachet de baterii chimice. Facând o antiteza între vehiculele
convenţionale, care sunt propulsate de un motor termic cu ardere internă şi vehiculele electrice,
la cele din urmă vom observa o serie de avantaje precum: funcţionare silenţioasă şi fără vibraţii;
randament ridicat; absenţa emisiilor de noxe (ZEV – zero emission vehicle); independenţa de
combustibilii fosili;
Sistemul de propulsie electrică este compus din unitatea electronică de control a
vehiculului (Vehicle Electronic Control Unit – VECU), convertorul static de putere, motorul
electric, transmisia mecanică şi roţile motoare. Sistemul sursei de energie cuprinde sursa de
energie (pachetul de baterii chimice), unitatea de gestionare a energiei şi unitatea de încărcare cu
energie. Sistemul elementelor auxiliare este format din unitatea de asistare a direcţiei, unitatea de
control a climatizării habitaclului şi unitatea surselor auxiliare de alimentare. Unitatea de
management a energiei cooperează cu unitatea electronică de control a vehiculului pentru a
controla regimul de recuperare a energiei. Ea cooperează, de asemenea, cu unitatea de
reîncărcare a bateriilor pentru a controla regimul de încărcare şi a monitoriza gradul de încărcare.
Sistemul surselor auxiliare de putere furnizează puterea necesară la diferite nivele de tensiune
pentru toţi consumatorii electrici auxiliari, şi în mod special pentru sistemul de climatizare şi a
unităţii de direcţie asistată.
5.1. Baterii utilizate în arhitecturi electrice și electrice hibride
Bateriile electrochimice sunt dispozitive care convertesc energia electrică în energie chimică
potenţială în timpul încărcării, şi energia chimică potenţială în energie electrică în timpul
descărcării. O baterie este compusă din câteva celule elementare legate împreună. În principal, o
celulă de baterie este formată din trei elemente primare: electrodul pozitiv; electrodul negativ;
electrolitul.
Un parametru important al unei baterii îl reprezintă gradul de încărcare (State Of Charge
– SOC), adică raportul între capacitatea curentă şi capacitatea totală a bateriei. Modificarea stări
de încărcare în intervalul de timp dt, cu un curent de încărcare sau descărcare i constant poate fi
exprimată sub forma:

15
(1)
unde Q(i) este capacitatea bateriei la curentul de descărcare i. În regim de încărcare
curentul are valoare negativă, iar în regim de descărcare curentul are valoare pozitivă. În acest fel
gradul de încărcare a bateriei poate fi exprimat sub forma:
∫
(2)
unde SOC0 este valoarea iniţială a gradului de încărcare. Puterea preluată de rezistenţa de
sarcină se exprimă sub forma:
(3)
Avantajele bateriilor cu plumb constau în preţul mic, tehnologie maturizată, putere
specifică relativ mare şi durată de viaţă bună (multe cicluri de încărcări/descărcări). Bateriile cu
plumb au şi o serie de dezavantaje: densitatea de energie este mică, caracteristicile de
temperatură sunt nesatisfăcătoare. Astfel sub 10ºC puterea sa specifică şi energia specifică sunt
reduse simţitor. Nichelul este un metal mai uşor decât plumbul şi are proprietăţi electrochimice
foarte bune, adecvate aplicaţiilor de baterii. Există patru tehnologii diferite bazate pe nichel.
Tensiunea de celulă este 1.30V. Baterii nichel-hidridă metalică (Ni-MH) au apărut pe piaţă în
1992. Bateriile pe bază de litiu se împart în două tehnologii majore pe bază de litiu: litiu-polimer
şi litiu-ion. Avantaje ar fi o rată mică de autodescărcare (aprox. 0.5%/lună) şi posibilitatea de
producere în forme şi dimensiuni variate. Dezavantajul major îl reprezintă diminuarea
performanţelor la temperatură scăzută deoarece scade conductivitatea ionilor. Baterii litiu-ion
(Li-ion) au fost deja utilizate în aplicaţii ale vehiculelor electrice şi hibride.
Capitolul 6. Vehicule electrice hibride
Autovehiculele convenţionale existente pe piaţă au performanţe dinamice bune şi o rază
de acţiune mare datorită utilizării carburanţilor cu energie specifică mare. Dezavantajul major îl
reprezintă consumul crescut de combustibil şi un grad mare de poluare a mediului înconjurător.
Pe de altă parte vehiculele pur electrice, au unele avantaje în raport cu cele convenţionale cum ar
fi eficienţa mare şi grad de poluare nul, cu precizarea că raza de acţiune este cu mult mai mică
decât a vehiculelor convenţionale. Modelele hibride au avantajele vehiculelor electrice, în
principal gradul nul de poluare și cele ale vehiculelor convenţionale adică energia specifică mare
a carburanţilor. Prin trenurile de acţionare specifice, vehiculele hibride pot îmbunătăţi consumul
de combustibil al vehiculelor convenţionale. În principiu, un consum redus poate rezulta din
subdimensionarea motorului termic, recuperarea unei părţi din energia pierdută prin frânare,
optimizarea distribuţiei de energie între sursele de energie, eliminarea consumurilor de
combustibil în mers în gol prin oprirea motorului termic, eliminarea pierderilor de ambreiaj prin
utilizarea motorului termic când turatia sa este adaptată la viteza vehiculului.
6.1. Trenul de acţionare electric hibrid
Datorită noilor norme impuse în ultimii ani pentru autovehicule, marii constructori de
maşini au implementat soluţii noi pentru client.
Ultimele cercetari dezvaluie vehicule cu mai multe surse de energie:
16
- un motor termic; un motor electric alimentat de la pile de combustie cu hidrogen; un motor
electric alimentat de la baterii sau supercondensatori. Trenul de putere al unui vehicul hibrid
constă într-un tren de putere primar (1) (unidirecţional) şi un tren de putere secundar (2)
(bidirecţional). Există mai multe moduri de combinare a acestora pentru a furniza puterea cerută
de utilizator:
a) este folosit doar trenul de putere (1).
b) doar trenul de putere (2) este utilizat.
c) Ambele trenuri de putere acţionează simultan pentru a produce puterea necesară.
d) Trenul de putere (2) recuperează energia cinetică a vehiculului în regim de decelerare.
e) Trenul de putere (2) obţine energie de la trenul de putere (1)
f) Trenul de putere (2) obţine energie de la trenul de putere (1) şi de la calea de rulare
g) Trenul de putere (1) furnizează simultan putere pentru propulsie şi pentru înmagazinare.
h) Trenul de putere (1) furnizează energie trenului de putere (2) iar acesta furnizează puterea
de propulsie
i) Trenul de putere (1) furnizează puterea necesară propulsiei iar trenul de propulsie (2) preia
energie de la calea de rulare.
6.2. Arhitecturi ale autovehiculelor electrice hibride
Legătura dintre componentele prin care trece fluxul de energie al unui hibrid şi partea de
control, poate fi denumită arhitectură. Cele două categorii clasice sunt serie și paralel. Ultimele
cercetări în domeniu însă, au aratat că vehiculele electrice hibride se pot împărti în 4 categorii:
vehicul electric hibrid serie; vehicul electric hibrid paralel; vehicul electric hibrid serie-paralel și
vehicul electric hibrid complex.
6.2.1 Arhitectura serie
În cazul unui vehicul electric hibrid serie, două surse de energie alimentează un singur
motor de tracţiune, cel propulsor. Sursa de energie unidirecţională este rezervorul de combustibil
fosil lichid iar convertorul unidirecţional de energie este un motor termic cuplat cu un generator
electric. Ieşirea generatorului electric este conectată la o magistrală de putere electrică printr-un
redresor. Arhitectura serie are cateva avantaje pentru care a fost preferată în dezvoltarea unor
mijloace de transport.
1. Motorul termic poate funcţiona numai în regiunea de randament maxim deoarece este
complet decuplat de la roţile motoare. Mai mult, decuplarea mecanică a motorului termic de
roţile motoare permite utilizarea unui motor termic de turaţie mare (şi cuplu mic) Randamentul şi
emisiile de noxe ale motorului termic pot fi mult îmbunătăţite printr-un control optimal pentru o
regiune îngustă.
2. Deoarece motoarele electrice au o caracteristică cuplu-viteză aproape ideală ele nu
necesită transmisii cu trepte multiple de viteze. În acest fel construcţia se simplifică foarte mult
iar costurile de producţie scad corespunzător. Mai mult, se pot utiliza două motoare electrice care
să acţioneze individual câte o roată. Această configuraţie permite o decuplare mecanică între roţi
că şi un diferenţial mecanic dar acţionează, de asemenea, şi că un diferenţial de limitare a
patinării în scop de control al tracţiunii. De asemenea se poate realiza o acţionare pe fiecare din
cele patru roţi (4x4) fără utilizarea de arbori de transmisie şi diferenţiale mecanice.
3. Strategiile de control sunt simple deoarece există decuplarea mecanică dintre roţile
motoare și motorul termic.
17
Dezavantajele majore sunt:
1. Energia mecanică obţinută de la motorul termic este convertită de două ori: energia
mecanică în energie electrică de către generatorul electric şi energia electrică în energie
mecanică de către motorul de tracţiune. În acest fel randamentul de ansamblu al trenului de
putere poate scădea semnificativ.
2. Generatorul utilizat creşte masa şi costurile arhitecturii.
3. Motorul de tracţiune trebuie să fie dimensionat pentru a satisface toate cerinţele
maxime de performanţă deoarece el este singura sursă de propulsie a vehiculului.
6.2.2 Arhitectura de tip paralel
Diferit faţă de hibridul serie, vehiculul electric hibrid paralel permite celor două motoare
să distribuie putere în paralel acţionării roţilor. Deoarece cele două motoare sunt în general
cuplate la axul roţilor prin intermediul a două cutii de viteze, puterea de propulsie poate fi
furnizată de un singur motor cu ardere internă, de un motor electric sau de amândouă. Puterile de
la motorul termic şi motorul electric sunt conectate împreună prin cuplaj mecanic. Combinarea
puterii motorului termic şi a motorului electric permite diverse configuraţii.
Puterile de la cele două motoare pot fi cuplate împreună printr-un dispozitiv de sumare a
vitezelor. Alegerea rolului corespunzător pentru fiecare parte determină raportul de transmisie
pentru setul planetar. Cuplul la pinionul solar este cel mai mic, cuplul la sistemul portplanetar
este cel mai mare iar cuplul la coroana planetară are o valoare intermediară. Ca şi dispozitivele
de sumare a cuplurilor, acest dispozitiv de sumare a vitezelor poate fi utilizat pentru proiectarea
diferitelor trenuri de acţionare hibride. Motorul termic furnizează puterea la pinionul solar prin
intermediul unui ambreiaj şi a unei cutii de viteze pe când motorul electric furnizează puterea la
coroana planetară cu ajutorul unei perechi de roţi dinţate. Sistemele de blocare sunt utilizate
pentru blocarea pinionului solar şi respectiv a coroanei planetare la sistemul de referinţă staţionar
al vehiculului în scopul satisfacerii cerinţelor diferitelor moduri de funcţionare.
6.2.3 Arhitectura mixta (serie – paralel)
Cea de-a treia configuraţie constructivă a vehiculelor electrice hibride constă într-o
combinaţie a celor două moduri (serie-paralel). Varianta hibridă mixtă constă în asigurarea unei
posibilităţi de conectare a axului generatorului la cel al motorului. Astfel cea mai simplă
conexiune mixtă rezultă prin montarea generatorului pe axul de antrenare al motorului electric,
cuplarea realizându-se prin intermediu unui ambreiaj comandat de unitatea centrală a vehiculului
hibrid. În felul acesta prin alimentarea generatorului de la pachetul de baterii se obţine încă un
propulsor electric iar dacă nu este comandat puterea mecanică a liniei de acţionare poate fi
asigurată de motorul termic. Prin selectarea manuală sau automată a modului de lucru se poate
trece de la o configuraţie paralelă la una serie şi invers sporind flexibilitatea. Comutarea directă,
prin ambreiaj, prezintă dezavantajul unei încărcări bruşte a motorului termic atunci când se
comută din configuraţia serie (ambreiaj decuplat) în cea paralelă (ambreiaj cuplat) şi aceasta mai
ales în regimurile de putere redusă sau de mers în gol, când motorul termic se poate cala. De
aceea este de dorit ca cele două configuraţii să poată fi active în acelaşi timp, partajând acelaşi
motor termic, modul de funcţionare serie sau paralel să putând fi stabilit prin adaptarea
regimurilor celor două maşini electrice reversibile. Pentru caracterizarea performanţelor
18
vehiculelor electrice hibride se foloseşte un indicator specific, numit grad de hibridizare
electrică. Acesta se defineşte sub forma:
∑
∑ (1)
Cu ajutorul gradului de hibridizare, H, se poate realiza o nouă clasificare a vehiculelor
electrice hibride: micro hybrid (H=15%), mild hybrid (H=25%) şi full hybrid (H=50%).
Capitolul 7 Metode pentru analiza vehiculelor electrice hibride.
7.1 Simulările off-line
Pentru analiza vehiculelor electrice hibride, din punct de vedere al consumului sunt
utilizate mai multe metode de analiză printre care metoda punctului mediu de funcţionare,
metoda cvasistatică şi modelarea dinamică. În această etapă, mai întâi sunt determinate cerinţele
și restricţiile modelului iar apoi sunt proiectate componentele de sistem. Simularea numerică este
o metodologie des utilizată pentru optimizarea performanţelor vehiculelor electrice hibride.
Acest tip de analiză este folosit şi de producătorii de maşini pentru a reduce costurile de realizare
a prototipurilor şi timpul necesar realizării. Arhitectura vehiculelor conţine diferite subsisteme,
conectate între ele prin legături mecanice electrice și de control. De aceea simularea trebuie să se
bazeze pe semnale mixte.
7.2 Simulări on-line
O cerinţă esenţială impusă sistemelor de control digital încorporat (embedded systems) şi
de achiziţie şi prelucrare numerică a semnalelor (DSP-based systems), este operarea în timp real,
cu garantarea respectării termenelor de timp impuse de specificaţiile de proiectare şi de mediu.
Tranziţia uşoară şi rapidă de la conceptele unui proiect la verificările lor experimentale se
poate realiza cu ajutorul unor instrumente adecvate de proiectare asistată a sistemelor de control
(Computer Aided Control Systems Design – CACSD). Instrumentele CACSD, sunt din ce în ce
mai intens utilizate de firmele producătoare de autovehicule precum Toyota, Ford, BMW, Audi,
Daimler-Chrysler şi altele. Simularea HIL permite testarea unităţilor electronice de control în
laborator, independent de vehiculul de test. Faţă de metoda clasică de testare pe un vehicul real,
metoda are avantajul de-a asigura reproductibilitatea condiţiilor de testare, posibilitatea de testare
în situaţii extreme, modificarea uşoară a parametrilor sistemului de control şi posibilitatea de
automatizare a testării complete a unităţilor electronice de control din producţia de serie. În acest
fel efortul de testare şi dezvoltare poate fi redus considerabil. Tehnica de simulare în timp real
serveşte ambelor scopuri, atât pentru RCP cât şi pentru HILS.
7.3 Pachetul software pentru simularea autovehiculelor ADVISOR
Una din cele mai utilizate unelte software pentru analiza autovehiculelor hibride este mediul
de simulare Matlab Simulink, la care se adaugă pachetul ADVISOR (ADvanced VehIcle
SimulatOR), sintetizat de National Renewable Energy Laboratory din SUA. Scopul este de a
19
putea analiza rapid aspecte importante ale autovehiculelor convenţionale, pur electrice sau
hibride, precum consumul de combustibil, de energie, emisiile, noxele, evaluarea strategiilor de
management energetic, etc. Acesta lucrează interactiv cu mediul de programare Matlab şi
Simulink şi conţine o bază de date importantă în care se găsesc tipuri de vehicule, motoare
termice şi electrice, baterii, supercondensatoare, transmisii mecanice etc.
Interfaţa programului este prietenoasă și permite alegerea tipului de autovehiculului
(convenţional, pur electric, sau hibrid) care urmează a fi simulat, puterea motorului termic (în
Kw), tipul de baterii (Pb, Li), puterea motorului electric (în Kw), tipul de transmisie, tipul de
strategie de control, etc. În etapa a-2-a se pot alege ciclul de drum pe care va fi testat
autovehiculul ales anterior şi teste pentru performanţele dinamice precum accelerarea de la o
anumită viteză la alta precum şi gradul pantei pe care va urca modelul. La sfârșitul testelor se
poate urmări distanţa parcursă de mobil, timpii de accelerare doriți de utilizator, viteza maximă
atinsă pe panta nulă, viteza maximă atinsă pe panta având gradul de inclinare prestabilit de
utilizator, şi cel mai important, consumul de combustibil, de energie şi noxele emise.
7.3.1 Modelarea trenului de acţionare
Forţele de rezistenţă ale căii de rulare din relatia sunt modelate ca:
singMF vx (1)
Forţa de rezistenţă aerodinamică, Faer, datorită mișcării vehiculul care împinge aerul din
faţă să este descrisă că o funcţie proporţională cu pătratul vitezei:
2
2
1)sgn( vACvF fDaeraer (2)
Forţele şi cuplurile care acţionează la o roată motoare sunt influenţate de viteza unghiulară
a roţii. Forţa de rezistenţă la rostogolire, Fr, este proporţională cu forţa normală care acţionează
asupra roţilor, Fy. Aceasta înseamnă că forţa de rezistenţă la rulare nu este aceeaşi pe toate roţile
vehiculului, consecinţă a distribuţiei neuniforme a greutăţii acestuia.
yrrr FvCCF )( 10 (3)
Uzual, coeficientul Cr0 are plaja [0.004,0.02] iar Cr1 <<Cr0.
Forţa de tracţiune maximă care poate fi dezvoltată la suprafaţa de contact pneu-cale de
rulare este uzual descrisă cu ajutorul forţelor normale şi al coeficientului de aderenţă, μ. În cazul
unei punţi motoare faţă, forţa de tracţiune are forma:
yft FF max (4)
În multe situaţii, această forţă de tracţiune maximă este principala limitare în performanţele
vehiculului. Acest lucru se întâmplă mai ales atunci când vehiculul se deplasează pe suprafeţe
umede, acoperite cu gheaţă sau cu zăpadă, sau când se deplasează pe suprafeţe de contact moi
(nisip).
Pentru modelarea în Simulink a roţii este necesară obţinerea unui model al alunecării
cauciucului faţă de calea de rulare. Notăm alunecarea cu s.
20
w ar vs
v
(5)
7.3.2 Modelarea motorului de tracţiune
Performanţele dinamice ale unui vehicul sunt uzual evaluate prin timpul de accelerare,
viteza maximă şi capacitatea de ascensiune. Proiectarea acestor parametri depinde în cea mai
mare parte de caracteristicile mecanice (cuplu, putere) ale motorului electric de tracţiune. În zona
vitezelor joase, până la viteza de bază, ωb, motorul are un cuplu maxim constant, limitat de
regimul termic nominal. În regiunea vitezelor mai mari decât viteza de bază motorul intră în
regiunea de funcţionare la putere constantă.
Variaţia caracteristicilor mecanice poate fi uşor argumentată cu ajutorul ecuaţiilor de
tensiune şi de cuplu ale motorului de curent continuu. Astfel, în regim staţionar, aceste ecuaţii au
forma:
EIRkIRU aaeaaa (6)
aee IkT (7)
Atunci când viteza de rotaţie devine egală cu viteza de bază, tensiunea electromotoare
devine comparabilă cu tensiunea maximă de la bornele motorului electric. Deoarece în această
gamă de viteze cuplul electromagnetic a fost menţinut constant la valoarea sa maximă, puterea
mecanică dezvoltată de motor are o variaţie liniară, dependentă de viteza unghiulară de rotaţie:
maxeTP (8)
Pentru evaluarea cuplului electromagnetic total se foloseşte ecuaţia de bază a mișcării:
relr
m TTdt
dJ
lim (9)
sau
dt
dJTT r
mrellim
(10)
Folosindu-se viteza mecanică limitată, cuplul electromagnetic este limitat pe baza
caracteristicii mecanice a maşinii electrice.
)),(min( lim1lim elrel TfT (11)
unde f1 este o funcţie care exprimă valoarea maximă a cuplului în funcţie de viteză.
Mărimile mecanice limitate sunt utilizate apoi pentru interpolare, determinându-se puterea
activă.
),( limlim2 elractiva TfP (12)
În final, cuplul electromagnetic disponibil se determină cu ajutorul relaţiei:
dt
dJT
dt
dJT
P
PT r
melMEr
mel
activa
aa
limlim
limlim
(13)

21
7.3.4 Modelul generatorului folosit în arhitectura serie
Cuplul şi turaţia rotorului sunt intrări din blocul de modelare al motorului termic. O altă
intrare în model este valoarea tensiunii din bateria de voltaj ridicat. Împreună cu limita de curent
maxim se stabileşte dacă puterea rezultată din generator esta mai mică, în caz contrar se alege
puterea calculată maxIUPgen . În blocul „efectul inerţiei” se ţine cont de inerţia rotorului
generatorului şi are forma din ecuaţia (18):
gengenmt Tdt
dJT
(14)
unde m tT este cuplu generat de motorul termic, genT este cuplul de intrare în tabel2D, genJ
momentul de inertie, iar dt
dreprezintă acceleraţia unghiulară a rotorului.
7.3.5. Modelarea bateriilor electrochimice
Bateriile electrochimice sunt o componentă esenţială atât în arhitectura vehiculelor
electrice cât şi în cea a vehiculelor electrice hibride. Ele reprezintă un sistem reversibil de
înmagazinare a energiei, care transformă energia electrochimică în energie electrică şi invers.
Capacitatea unei baterii Q, exprimată de regulă în Amperi-oră, Ah, reprezintă integrala
temporală a curentului pe care bateria poate să-l furnizeze în anumite condiţii. Pentru selecţia
corespunzătoare a rezistenţei interne a bateriei, dependentă de ciclu de încărcare/descărcare, se
utilizează puterea cerută de la pachetul de baterii. Puterea maximă limitată este calculată cu
relaţia:
int
limR
UUUP busoc
busr
(15)
unde Ubus poate fi Uoc/2 sau Ulim min. Determinarea curentului şi tensiunii pachetului de baterii
din funcţionarea curentă se determină în baza relaţiei :
IRUU oc int (16)
Prin înmulţirea ei cu valoarea curentului de sarcină se obţine:
lim
2
int roc PIRIUIU (17)
sau
0lim
2
int roc PIUIR (18)
Determinarea gradului de încărcare a pachetului de baterii se realizează considerând
capacitatea maximă a pachetului de baterii, temperatura de funcţionare şi randamentul de
încărcare/descărcare. Suplimentar, modelul consideră şi o stare iniţială de încărcare a pachetului
de baterii, SOC0, diferită de valoarea unitară. Astfel gradul de încărcare iniţial poate fi evidenţiat
sub forma:
0
1000 )()1(
Q
dttISOCQQSOC
(19)
22
7.3.6 Modele de cicluri de drum
Drept modele de trafic sunt folosite ciclurile de trafic standardizate, adică profiluri de
viteză care reprezintă o varietate de împrejurări de rulare a vehiculului. Ciclurile de trafic au fost
iniţial introduce pentru a măsura consumul de combustibil şi emisiile de noxe. Prin emularea însă
a diverselor accelerări, decelerări şi viteze de regim staţionar, ciclurile de trafic evaluează
indirect performanţele dinamice şi energetice ale vehiculului. În timp ce unele cicluri de trafic
sunt specifice traficului urban, incluzând porniri, opriri, accelerări şi decelerări frecvente, alte
cicluri de trafic sunt specifice traficului pe autostrăzi, având viteze medii mult mai mari şi
accelerări şi decelerări mai puţine. Astfel, în traficul urban linia de acţionare funcţionează mai
frecvent la viteze mici şi cupluri mari, pe când în cazul traficului pe autostradă ea funcţionează la
viteze mari şi cupluri mici.
7.4 Comparaţie între diferite arhitecturi
Pentru a avea o vedere de ansamblu asupra arhitecturilor hibride şi a avantajelor
respectiv, dezavantajelor faţă de vehiculele convenţionale sau pur electrice am ales cele mai
semnificative teste pentru simulare în ADVISOR. Vom analiza fiecare tip de vehicul în parte,
convenţional, electric cu diferite tipuri de baterii și hibrid serie şi paralel. Se vor folosi aceleași
cicluri de drum pentru a observa raza de acţiune, consumul, noxele și performante dinamice
precum capacitatea de ascensiune a unei rampe şi diferiți timpi de accelerare. Vor fi luați în
considerare timpul de accelerare de la 0 la 100Km/h şi timpul de accelerare de la 30 de km/h la
60Km/h. De asemenea se va putea observa și viteza maximă cu care rulează respectivele
arhitecturi de autovehicule.
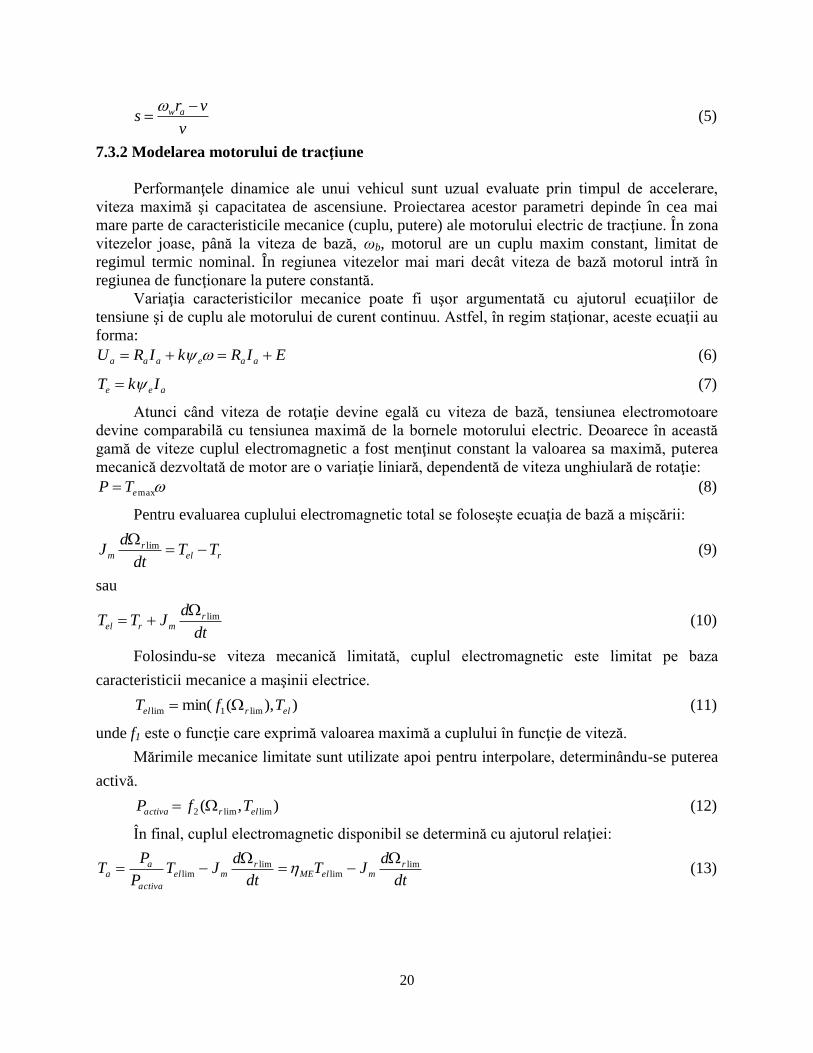
Pentru primul caz am luat în considerare un vehicul convenţional cu o greutate de
1001Kg şi cu un motor termic de 47 de KW. Rezultatele testelor în ceea ce priveşte
performanţele dinamice au fost după cum urmează:
- timp de accelerare 0-100km/h ->16s
- timp de accelerare 30-60km/h: 4s;
- acceleraţie maximă -> 3.1m/ ;
- viteza maximă: 155.6 km/h;
- rampa maximă la 40km/h: 38.9%.
Pentru testarea eficienţei combustibilului, vehiculului a fost testat pe parcursul a 5 cicluri
de drum de tip ECE (echivalentul a 5 Km de trafic urban), 5 cicluri de tip EUDC (echivalentul a
38.5 Km trafic de autostradă) şi 5 cicluri de tip ECE_EUDC, echivalentul a 50.7 Km trafic mixt.
Rezultatele în ceea ce priveşte consumul autovehiculului de tip convenţional la sfârșitul
celor 3 tipuri de teste au fost după cum urmează:
- consum urban.....8.1l/100 km
- consum extra urban...5.3l/100 km
- consum mixt.....6.3l/100 km
- emisii în mediul urban: HC=0.888 g/km; Nox=0.392 g/km; CO=2.994 g/km
- emisii în regim autostradă: HC=0.194g/km CO=2.994 g/km; Nox=0.185 g/km
Eficienţa globală a sistemului după terminarea celor 5 cicluri urbane este de 0.05; 0.174
după cele 5 cicluri de autostradă şi 0.118 după cele 5 cicluri mixte.
23
Fig.1. Comparaţie între vehiculul convenţional şi cele 2 tipuri electrice
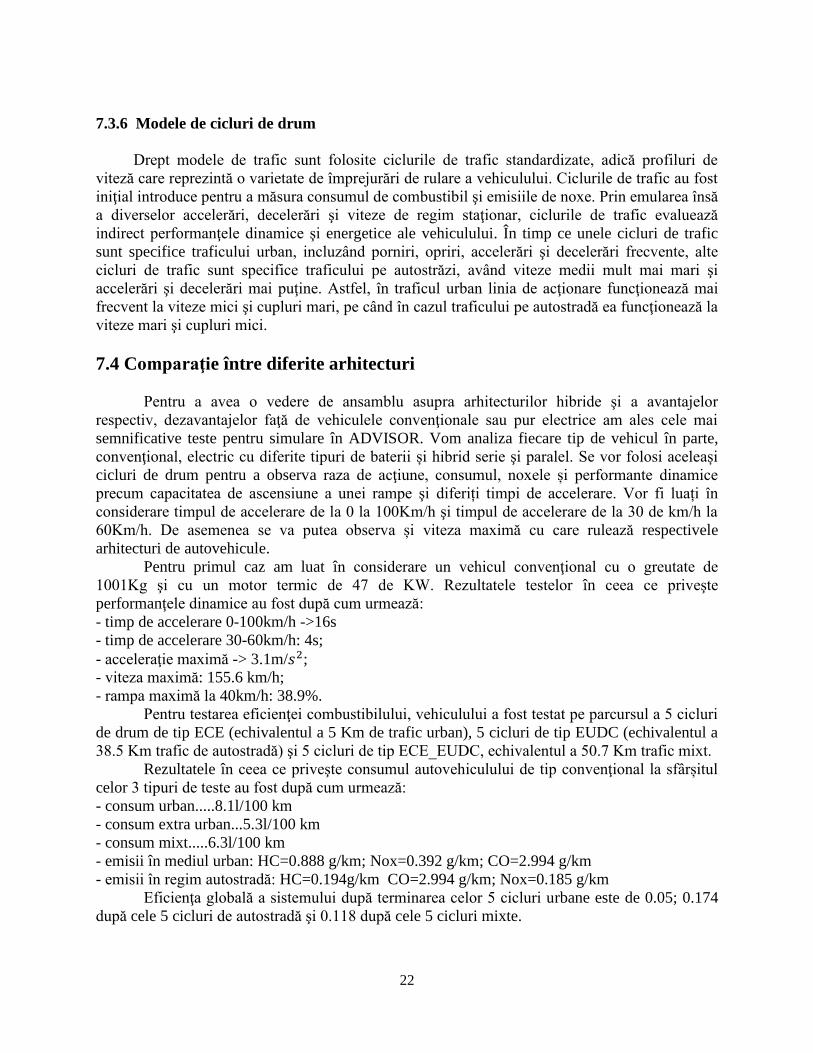
2) În cazul al doilea a fost luat în considerare pentru testare un autovehicul convenţional
având 1135 de Kg și un motor termic de 94Kw. Din nou această valoare a puterii motorului a
fost special aleasă pentru a egala suma puterilor motoarelor electrice şi termice ale vehiculului
hibrid ce urmează a fi testat. Ca şi performanţe dinamice s-a putut observa:
- timp de accelerare 0-100km/h ->8.7s
- timp de accelerare 30-60km/h: 2.3s;
- acceleraţie maximă -> 5m/ ;
- viteza maximă: 210 km/h;
- rampa maximă la 40km/h: 50%.
Din nou la sfârşitul testelor de drum au fost obţinute următoarele valori pentru consum:
- consum urban.....8.7l/100 Km
- consum extra urban...7.5l/100 Km
- consum mixt.....8l/100 Km
- emisii în mediul urban: HC=1.64 g/Km; Nox=5.71 g/ Km; CO=0.468 g/ Km
-emisii în regim autostradă: HC=0.314g/ Km CO=1.105 g/ Km; Nox=0.139 g/ Km
Fig.2. Comparaţie între vehiculul convenţional şi hibrid paralel
0
5
10
15
20
Conventional
Electric Plumb
Electric Litiu
02468
101214
Conventional
Hibrid paralel
24
3) Pentru cazul al 3-lea am ales un vehicul pur electric de 1110 Kg, având un motor de 47
de KW și un pachet de baterii pe baza de plumb. La sfârşitul testelor am obţinut ca şi
performanţe dinamice următoarele valori:
- timp de accelerare 0-100Km/h ->17.7s
- timp de accelerare 30-60Km/h: 3.9s;
- acceleraţie maximă -> 5m/ ;
- viteza maximă: 130 Km/h;
- rampa maximă la 40Km/h: 27.7%.
Prin diferite transformări ale energiei disipate s-a putut calcula un consum echivalent de
combustibil după cum urmează:
- consum urban.....1.9l/100 Km
- consum extra urban...2l/100 Km
- consum mixt nu s-a putut stabili deoarece vehiculul nu a avut resurse suficiente pentru a
termina testul.
- emisii în mediul urban; autostradă: 0
4) Am ales acelaşi vehicul electric dar am schimbat pachetul de baterii alegând de aceasta
dată tehnologia pe litiu. S-a observat că toate performantele dinamice au fost mai bune, inclusiv
consumul echivalent în oraș, dar în ceea ce priveşte testul pe autostradă sau cel mixt vehiculul nu
a putut termina nici unul din cele două:
- timp de accelerare 0-100Km/h->14.1s
- timp de accelerare 30-60Km/h: 3.2s;
- acceleraţie maximă -> 5m/ ;
- viteza maximă: 124.2 Km/h;
- rampa maximă la 40Km/h: 36.3%.
5) Următorul vehicul testat este un hibrid de tip paralel de 1323 Kg cu baterii pe bază de
plumb. Performanţe dinamice:
- timp de accelerare 0-100Km/h->11.5s
- timp de accelerare 30-60Km/h: 2.6s;
- acceleraţie maximă -> 5m/ ;
- viteza maximă: 151.7 Km/h;
- rampa maximă la 40Km/h: 19.2%.
Pentru consum s-a considerat că starea iniţială de încărcare a bateriilor (SOC) să fie de 50%:
- consum urban.....4.8l/100 Km şi SOC final de 42%
- consum extra urban...6.7l/100 Km şi SOC final de 55%
- consum mixt.....6.5l/100 Km şi SOC final de 45%
- emisii în mediul urban: HC=1.64 g/Km; Nox=5.71 g/ Km; CO=0.468 g/ Km
-emisii în regim autostradă: HC=0.314g/ Km CO=1.105 g/ Km; Nox=0.139 g/ Km
Emisii:
- urban Hc=1.006g/km; Co=4.78g/km; Nox=0.97g/km;
- autostradă Hc=0.25g/km; Co=1.046g/km; Nox=0.378g/km;
- mixt Hc=0.22g/km; Co=1.023; Nox=0.37g/km;
7.5 Concluzii
S-a putut observa din teste, că autovehiculul de tip convenţional are performanţe
dinamice bune, în cazul în care este ales la început, un propulsor de putere mai mare.
25
Vehiculul cu un motor termic de 47 de KW, a avut o funcţionare defectuoasă în
comparaţie cu cel de 94 de KW, consumul pe testul extraurban arătând aproape la fel. În primul
caz în care am ales motorul termic de 47 de KW, înafara faptului că la sfârşit s-a obţinut un
consum ridicat de combustibil, nici performanţele dinamice nu au fost satisfăcătoare. Vehiculul
cu un propulsor de 94Kw a avut un consum apropiat cu cel de 47 de KW dar performanţe
dinamice mult îmbunătățite.
În ceea ce priveşte modelele alese pentru arhitectura electrică, s-a putut constata, că
utilizând bateriile pe baza de plumb, autovehiculul a avut o rază de acţiune mai mare, dar nu
suficientă din păcate. Nu a putut termina testul ECE_EUDC. Performanţele dinamice sunt
satisfăcătoare, iar consumul echivalent de combustibil, este destul de mic (2l/100Km).
Autovehiculul electric cu baterii pe bază de litiu, a obţinut performanţe dinamice mai
bune decât cel cu baterii pe bază de plumb, datorită densităţii mari de energie, dar raza de acţiune
a fost cu mult micşorată. Nu a putut termina nici măcar testul de autostradă. Starea de încărcare a
bateriilor a scăzut sub nivelul de minim înainte de terminarea testelor EUDC şi ECE-EUDC.
Trecând apoi la modelele de tip hibrid, au fost testate arhitecturile de tip serie şi paralel,
modificând apoi şi tipul de strategie de control. S-a putut observa că arhitectura de tip serie oferă
avantaje în privința consumului, şi performanţe dinamice acceptabile.
Cel mai avantajos model este cel de tip hibrid paralel, unde s-au înregistrat rezultate bune
pentru consumul de combustibil şi pentru performanţele dinamice.
Capitolul 8 Strategii de control HEV
Partea de control a vehiculelor electrice hibride trebuie să fie foarte bine dezvoltată
deoarece ajută la gestionarea în mod separat sau simultan sursele de putere, în timpul funcţionării
autovehiculului. Modul în care este solicitată furnizarea fluxului de energie de către sursele de
putere, fac obiectul strategiilor de control în domeniul sistemelor auto hibride. Deciziile
controlerului țin cont de faptul că puterea cerută de șofer prin acţionarea pedalelor trebuie să fie
asigurată integral atât timp cât ea nu depăşeşte valoarea maximă asigurată constructiv.
8.1 Clasificarea strategiilor de control în HEV
Strategiile aplicate de către sistemul de control pot fi bazate pe reguli sau pe optimizare.
Prima categorie se poate implementa destul de uşor cu ajutorul ecuațiilor logice sau fuzzy luând
în considerare mai multe variabile ale vehiculului. Dezavantajul lor constă în faptul că depind de
setări ale unor parametrii ce variază în trafic. Strategiile de control bazate pe optimizare,
minimizează funcţiile obiectiv date de consumul minim de combustibil și obţin referinţe de
putere pentru trenul de acţionare. Dacă această optimizare se realizează de-a lungul unui ciclu de
trafic prestabilit atunci se poate determina o soluţie optimală în raport cu acel ciclu. Prin
definirea unei funcţii obiectiv instantanee se pot crea noi strategii de control bazate pe
optimizarea în timp real.
Pe baza vitezei dorite, v*(t), în raport cu viteza reală a vehiculului condus, v(t), şoferul
acţionează fie pedala de acceleraţie, p(t), şi, eventual cea de ambreiaj, r(t), fie pedala de frână,
q(t):
max_max_ brake
PtqtracPtptrP (1)

26
Plecând de la această estimaţie, strategia de control determină în mod optimal când şi cât
de multă energie trebuie extrasă din fiecare sursă de putere (electrică, mecanică) pentru a
propulsa vehiculul cu atingerea obiectivelor iniţiale de control (consum minim, emisii minime).
Deciziile controlerului de supervizare trebuie să ţină seama de două restricţii
(constrângeri). În primul rând puterea de deplasare cerută de șofer trebuie să fie asigurată
totdeauna atât timp cât ea nu depăşeşte valoarea maximă asigurată constructive, Pr_max. În al
doilea rând, gradul de încărcare a pachetului de baterii trebuie să fie menţinut într-o plajă
prestabilită. În mod ideal, puterea de deplasare trebuie să fie distribuită în fiecare moment astfel
încât pe un ciclu de trafic de durată T să se obţină:
dt
fmJ
eP0
.min (2)
cu restricții de forma:
tb
PtePtrP (3)
1maxmin0 soctsocsoc (4)
max_0 ePteP (5)
Problema principală a acestei abordări constă în faptul că trebuie cunoscut a priori
caracteristicile ciclului de trafic (durată, viteză, panta, tipul căii de rulare, viteza şi direcţia
vântului). În funcţie de topologia surselor de putere, vehiculele electrice hibride mai pot fi
clasificate şi după modul de utilizare a sursei de înmagazinare a energiei. Din acest punct de
vedere se disting vehiculele electrice hibride cu descărcare avansată a pachetului de baterii
(charge depleting-CD) şi vehicule electrice hibride cu menţinerea stării de încărcare a pachetului
de baterii (charge sustaining-CS).
8.2 Strategii bazate pe reguli
Strategiile de control bazate pe reguli sunt implementate cu ajutorul ecuaţiilor logice
(variabile boole) sau fuzzy şi iau în considerare diversele variabile ale vehiculului. Marele
avantaj al acestor strategii de control (euristice) este că sunt uşor de conceput şi destul de uşor
de implementat. Dacă sunt acordate adecvat aceste strategii pot asigura rezultate bune cu privire
la consumul de combustibil şi gestiunea energiei în sursele de înmagazinare. Din păcate
comportarea acestor tipuri de controlere de supervizare depinde puternic de setările realizate
pentru anumite pragurile ale variabilelor cuantificate, valori care pot varia în funcţie de condiţiile
de trafic. Robusteţea limitată a acestor tipuri de controlere de supervizare euristice precum şi
efortul de acordare necesar justifică efortul de proiectare a unor algoritmi de supervizare bazaţi
pe model, care să optimizeze fluxul de putere. Strategiile de control bazate pe optimizare
determină referinţele de putere pentru componentele trenului de acţionare hibrid că soluţie a
minimizării unei funcţii obiectiv care în general reprezintă consumul de combustibil sau emisiile
de noxe.
8.2.1 Strategia de control termostat
Strategia de control tip „termostat”, (SCT), este o strategie primitivă, specifică pentru
configuraţia vehiculelor electrice hibride serie care utilizează un grup motor termic – generator
în scopul alimentării motorului de tracţiune şi pentru a încărca pachetul de baterii electrochimice

27
descărcat. Gradul de încărcare a pachetului de baterii (SOC) variază între două valori limită
prestabilite similar cazului unui termostat cu bimetal care menţine temperatura într-o gamă
dorită. Principiul strategiei de control este de a descărca pachetul de baterii până la valoarea
minim şi apoi de a porni motorul termic astfel încât acesta să antreneze generatorul pentru a
reîncărca pachetul de baterii de la care este alimentat motorul de tracţiune. În momentul în care
bateriile sunt încărcate complet, atingându-se astfel nivelul maxim al gradului de încărcare,
motorul termic este oprit din nou până când este necesară o nouă pornire. În timpul frânării o
parte din energia cinetică este recuperată pentru a contribui la încărcarea bateriilor prin frânare
cu recuperare.
8.2.2 Strategia de control Power Follower
Strategia de control cu urmărirea puterii de propulsie (SCUPP) are ca obiectiv
determinarea punctului de funcţionare al ansamblului motorului termic-generator, Pe (t), pentru a
urmări cerinţele medii de putere necesare deplasării vehiculului. Ansamblul motor termic –
generator este pornit tot timpul cu excepţia cazului când, datorită cerinţelor mici de propulsie,
gradul de încărcare a pachetului de baterii, SOC(t), depăşeşte nivelul maxim admisibil, SOC
max. Puterea furnizată de ansamblu motor termic-generator este determinată astfel:
(
)
(6)
unde Pe_min şi Pe_max sunt puterile extreme de ieşire ale grupului motor termic – generator iar
Pînc este valoarea puterii de încărcare a pachetului de baterii. Când motorul termic este pornit
puterea de ieşire a grupului tinde să urmărească puterea cerută pentru deplasarea vehiculului,
Pr(t). De aceea, în anumite momente, puterea de ieşire a motorului termic poate fi ajustată de
gradul de încărcare, SOC(t), care are tendinţa de a îl menţine în mijlocul plajei de funcţionare sau
peste o anumită valoare minimă. În alte momente, puterea de ieşire a generatorului poate fi
menţinută aproape de puterea de randament maxim al motorului termic sau modificată dar nu
mai rapid decât o anumită rată de variaţie prescrisă. Logica de funcţionarea este descrisă astfel:
(7)
Avantajul acestei strategii de control este că pachetul de baterii este relativ mic iar gradul
de încărcare este menţinut în jurul unei valori medii. Dezavantajul este că motorul termic este
forţat să funcţioneze în multiple puncte de funcţionare, pe curbele de randament şi emisii de
noxe, pentru a se adapta la modificările de sarcină. Însă modificarea lentă a clapetei de
acceleraţie (de către unitatea electronică de control a grupului motor termic-generator) poate
compensa acest efect negativ.
8.3 Strategii bazate pe logica fuzzy
28
Privind trenul de acţionare hibrid ca un domeniu multiplu, neliniar şi variabil în timp,
logica fuzzy pare a fi cea mai bună abordare a problemei. În locul regulilor deterministe se poate
aplica logica fuzzy pentru a face o împărţire optimă a puterii, în timp real. Acest controller este
privit că o extensie a celui bazat pe reguli. Avantajele majore sunt:
1) robustețea, deoarece este tolerant la măsurători imperfecte și variații ale
componentelor
2) adaptivitatea, deoarece regulile fuzzy pot fi modificate uşor dacă este nevoie.
8.4 Strategii de control bazate pe optimizare
Strategiile de control prezentate anterior sunt derivate din reguli de bază. Marele lor
avantaj este că nu necesită un model exact pentru controlerul de supervizare şi deci sunt simplu
de implementat. Însă ele nu caută în mod explicit să optimizeze consumul de combustibil sau
emisiile de noxe şi deci nu sunt optimizate pentru cel mai mic consum de combustibil. În acelaşi
timp un consum global optimizat poate fi asigurat pe baza funcţiei obiectiv numai cu ajutorul
metodelor necauzale de optimizare. Pentru a evita acest dezavantaj se poate înlocui criteriul
global - o funcţională, cu unul local – o funcţie, reducând problema la minimizarea consumului
de combustibil echivalent pentru fiecare moment curent de timp. Criteriul local devine:
(8)
unde este debitul masic de combustibil echivalent la orice moment de timp t
şi cu aceleaşi constrângeri.
Într-o strategie de tip CS (charge sustaining) orice încărcare sau descărcare a pachetului
de baterii trebuie ulterior balansată de o descărcare, respectiv o încărcare. Această descărcare sau
încărcare viitoare va rezulta într-un consum mai mic sau mai mare de combustibil decât cel
necesar pentru deplasarea vehiculului.
8.4.1 Strategia de control a minimizării consumului de combustibil echivalent
Strategia de control a minimizării consumului de combustibil echivalent (SCMCCE) se
bazează pe ipoteza de comportare cvasistaţionară a sistemului. În general, pentru un vehicul
această comportare este caracterizată prin surprinderea fenomenelor care au loc în gama de
0.5÷1s, dinamicele rapide fiind neglijate. În acest caz, pentru a formula explicit o funcţie obiectiv
care să minimizeze consumul de combustibil se utilizează un model cvasistatic al vehiculului
electric hibrid serie. Ideea principală constă în atribuirea utilizării curente a energiei electrice a
unor costuri şi economii/consumuri de combustibil viitoare astfel:
• o descărcare curentă a pachetului de baterii corespunde unui consum de combustibil în viitor,
care va fi necesar pentru reîncărcarea pachetului de baterii cu ajutorul grupului motor termic-
generator;
• o încărcare curentă a pachetului de baterii corespunde unei economii de combustibil în viitor,
deoarece această energie va fi disponibilă în viitor pentru a fi utilizată la un cost mai scăzut.
Consumul total de combustibil la un moment dat de timp poate fi exprimat că o sumă a
consumului real de combustibil al ansamblului motor termic-generator şi consumul echivalent al
pachetului de baterii [78].
29
( ) (9)
Acest fapt permite o reprezentare unificată a ambelor tipuri de energii utilizate din
consumul de combustibil şi pachetul de baterii, balansând costurile viitoare cu economiile
viitoare de combustibil. În timpul descărcării pachetului de baterii puterea electrică pozitivă
circulă de-a lungul magistralei electrice furnizând putere suplimentară pentru comanda motorului
de tracţiune. Această putere electrică este utilizată de motorul de tracţiune care furnizează putere
mecanică la roţi.
Capitolul 9. Strategia de control HEV având supercapacitori
ADVISOR ca şi mediu de simulare este o structură închisă. Prin interfaţa pusă la
dispoziţia utilizatorului, se pot alege diferite tipuri de arhitecturi de autovehicule precum şi
diferiţi parametrii de funcţionare (putere motor, tipuri baterii etc). Strategia de control este
prestabilită. În cele ce urmează s-a desfăcut blocul de control impus de ADVISOR, şi s-a înlocuit
cu altul conţinând altă strategie, pentru a încerca minimizarea consumului de combustibil şi de
energie prin gestionarea unei noi surse auxiliare (supercapacitori). Pentru arhitectura hibridă este
propusă ca sursă electrică, un pachet de baterii ce cuprinde 25 de module cu o tensiune nominală
de 308 volţi. ADVISOR nu permite prin interfaţa sa adăugarea de surse auxiliare, ci doar
schimbarea tipului de baterii. Pentru aceasta s-a desfăcut arhitectura simulink impusă cu baterii şi
s-a introdus un nou bloc ce conţine modelul unui pachet de supercapacitoare. Această sursă ar
putea fi foarte utilă în cazul în care șoferul dorește să depășească un obstacol fix sau în mișcare,
cerând un surplus de putere pentru o perioadă relativ scurtă de timp. Dificultatea în a obţine surse
de energie cu o viaţă extinsă, volum mic şi densitate mare de energie duce la căutarea de noi
soluţii. Una dintre ele ar putea fi hibridizarea surselor de energie şi de putere.
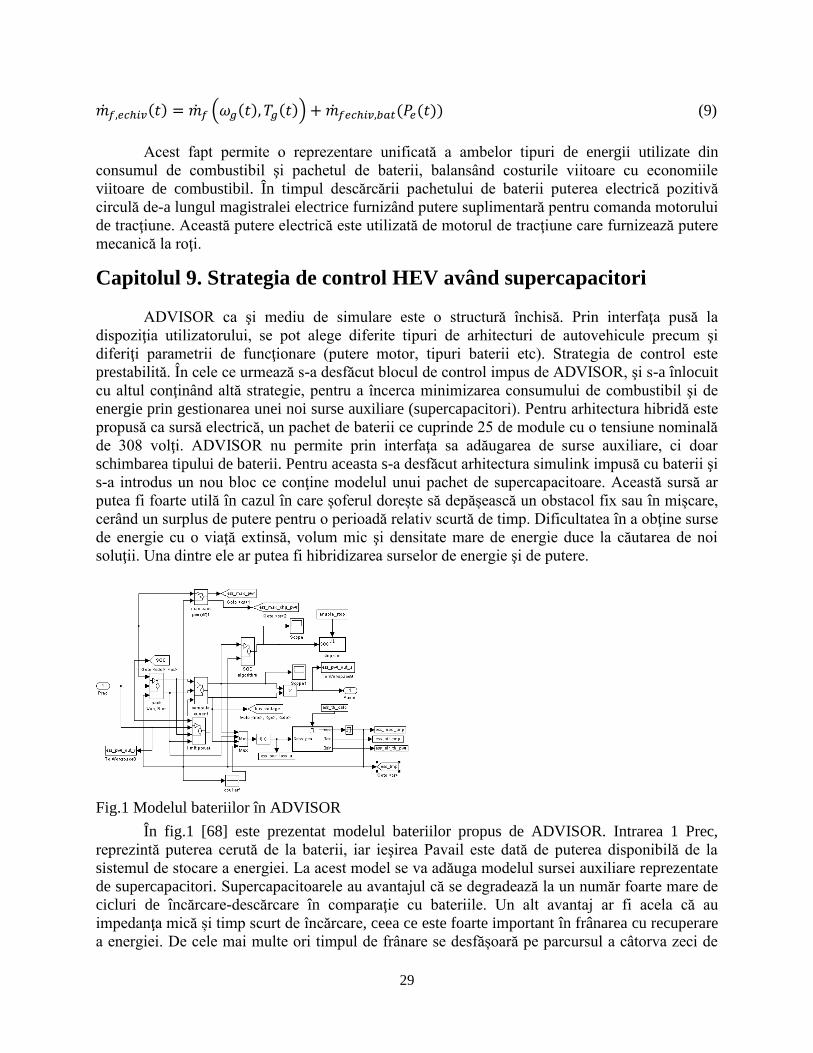
Fig.1 Modelul bateriilor în ADVISOR
În fig.1 [68] este prezentat modelul bateriilor propus de ADVISOR. Intrarea 1 Prec,
reprezintă puterea cerută de la baterii, iar ieşirea Pavail este dată de puterea disponibilă de la
sistemul de stocare a energiei. La acest model se va adăuga modelul sursei auxiliare reprezentate
de supercapacitori. Supercapacitoarele au avantajul că se degradează la un număr foarte mare de
cicluri de încărcare-descărcare în comparaţie cu bateriile. Un alt avantaj ar fi acela că au
impedanţa mică și timp scurt de încărcare, ceea ce este foarte important în frânarea cu recuperare
a energiei. De cele mai multe ori timpul de frânare se desfășoară pe parcursul a câtorva zeci de

30
secunde, poate chiar mai puţin. Un alt mare avantaj al supercapacitoarelor îl constituie densitatea
mare de energie. Astfel utilizând acelaşi volum alocat sistemului de stocare a energiei vom
obţine o putere mai mare, sau utilizând aceeaşi putere obţinem o greutate redusă care
influenţează mai puţin consumul total de combustibil al autovehiculului. Dezavantajul lor ar fi că
se descarcă mai rapid decât bateriile, deci oferă putere mare pe un timp scurt. Un supercapacitor
este caracterizat de capacitatea C și rezistenta R, modelul simplificat al acestuia fiind o înseriere
de C şi R. Tensiunea poate fi exprimată ca:
dttiC
uc 1
(1)
tirtutu sc (2)
Alt parametru important este constanta de descărcare : Crs 0 (3)
Energia maximă este dată de:
2
0max,02
1UCE (4)
unde 0U este tensiunea iniţială a capacitorului. Puterea poate fi exprimată cu ajutorul unei
rezistenţe de sarcină Rl
Fig.2 Modelul capacitorului cu transfer de putere
l
ls
cll R
Rr
uRiP
2
2
(5)
tVCQ c . (6)
dt
tdVC
dt
tdQtI c
sc . (7)
sVs
C
sI
dt
tdV
C
tIc
sccsc
. (8)
sVCssI csc (9)
Ecuația de încărcare este dată de relația:
tu
CRtV
CRdt
tdVc
c
11 (10)
Utilizând transformata Laplace s-a obţinut:
sV
CRsU
CRssV cc
111 (11)
Utilizând relaţia (11), va fi introdus modelul pachetului de supercapacitoare (fig.4) în
sistemul de stocare a energiei, pentru a prelua vârfurile de putere de pe magistrală. Modelul
implementat în ADVISOR a suferit câteva modificări, fiind necesar de adăugat tot în acest bloc
și o parte din control.
31
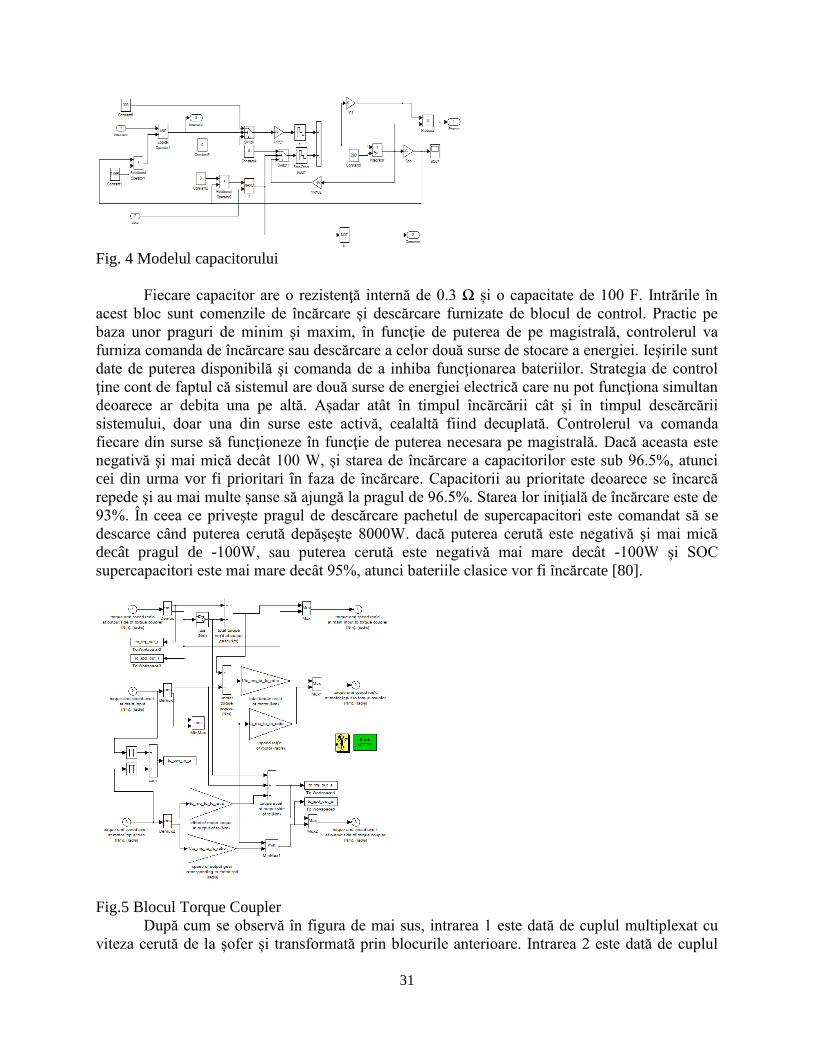
Fig. 4 Modelul capacitorului
Fiecare capacitor are o rezistenţă internă de 0.3 Ω și o capacitate de 100 F. Intrările în
acest bloc sunt comenzile de încărcare și descărcare furnizate de blocul de control. Practic pe
baza unor praguri de minim și maxim, în funcţie de puterea de pe magistrală, controlerul va
furniza comanda de încărcare sau descărcare a celor două surse de stocare a energiei. Ieşirile sunt
date de puterea disponibilă şi comanda de a inhiba funcţionarea bateriilor. Strategia de control
ţine cont de faptul că sistemul are două surse de energiei electrică care nu pot funcţiona simultan
deoarece ar debita una pe altă. Așadar atât în timpul încărcării cât și în timpul descărcării
sistemului, doar una din surse este activă, cealaltă fiind decuplată. Controlerul va comanda
fiecare din surse să funcţioneze în funcţie de puterea necesara pe magistrală. Dacă aceasta este
negativă şi mai mică decât 100 W, și starea de încărcare a capacitorilor este sub 96.5%, atunci
cei din urma vor fi prioritari în faza de încărcare. Capacitorii au prioritate deoarece se încarcă
repede şi au mai multe șanse să ajungă la pragul de 96.5%. Starea lor iniţială de încărcare este de
93%. În ceea ce priveşte pragul de descărcare pachetul de supercapacitori este comandat să se
descarce când puterea cerută depăşeşte 8000W. dacă puterea cerută este negativă şi mai mică
decât pragul de -100W, sau puterea cerută este negativă mai mare decât -100W și SOC
supercapacitori este mai mare decât 95%, atunci bateriile clasice vor fi încărcate [80].
Fig.5 Blocul Torque Coupler
După cum se observă în figura de mai sus, intrarea 1 este dată de cuplul multiplexat cu
viteza cerută de la șofer și transformată prin blocurile anterioare. Intrarea 2 este dată de cuplul
32
multiplexat cu viteza disponibilă de la motorul termic, iar intrarea 3 este dată de cuplul
multiplexat cu viteza disponibilă de la motorul electric. Ieşirile sunt comenzile de cuplu și viteză
cerute de la cele două tipuri de motoare, precum şi cuplul și viteza disponibile de la cele două
propulsoare. Se observă că mai întâi este accesat motorul termic pentru a furniza putere, apoi
diferenţa dintre cuplul şi viteza cerute de șofer și cuplul şi viteza disponibile de la prima sursă de
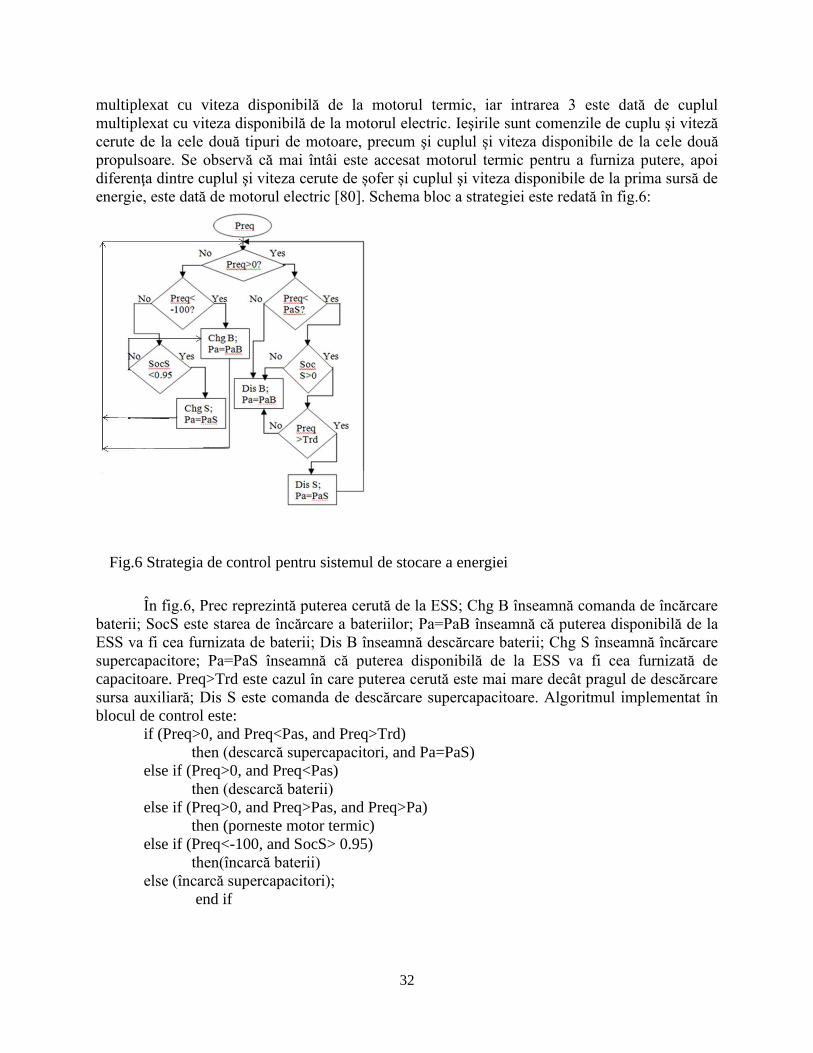
energie, este dată de motorul electric [80]. Schema bloc a strategiei este redată în fig.6:
Fig.6 Strategia de control pentru sistemul de stocare a energiei
În fig.6, Prec reprezintă puterea cerută de la ESS; Chg B înseamnă comanda de încărcare
baterii; SocS este starea de încărcare a bateriilor; Pa=PaB înseamnă că puterea disponibilă de la
ESS va fi cea furnizata de baterii; Dis B înseamnă descărcare baterii; Chg S înseamnă încărcare
supercapacitore; Pa=PaS înseamnă că puterea disponibilă de la ESS va fi cea furnizată de
capacitoare. Preq>Trd este cazul în care puterea cerută este mai mare decât pragul de descărcare
sursa auxiliară; Dis S este comanda de descărcare supercapacitoare. Algoritmul implementat în
blocul de control este:
if (Preq>0, and Preq<Pas, and Preq>Trd)
then (descarcă supercapacitori, and Pa=PaS)
else if (Preq>0, and Preq<Pas)
then (descarcă baterii)
else if (Preq>0, and Preq>Pas, and Preq>Pa)
then (porneste motor termic)
else if (Preq<-100, and SocS> 0.95)
then(încarcă baterii)
else (încarcă supercapacitori);
end if
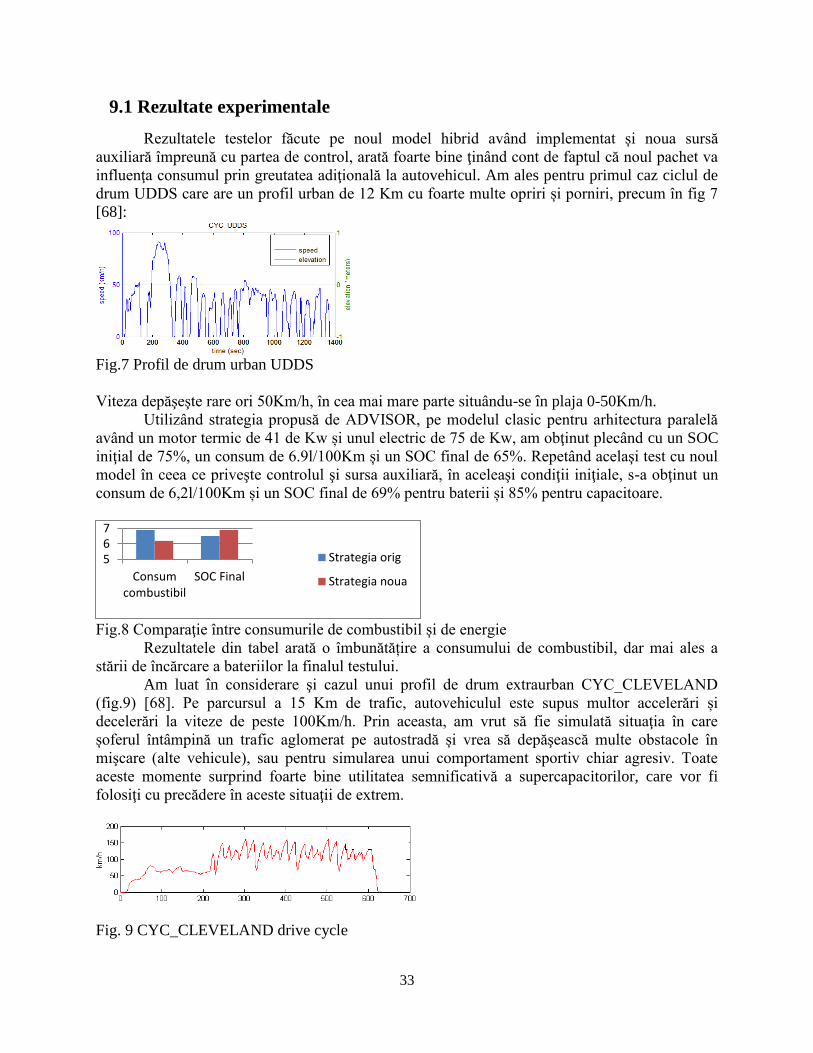
33
9.1 Rezultate experimentale
Rezultatele testelor făcute pe noul model hibrid având implementat și noua sursă
auxiliară împreună cu partea de control, arată foarte bine ţinând cont de faptul că noul pachet va
influenţa consumul prin greutatea adiţională la autovehicul. Am ales pentru primul caz ciclul de
drum UDDS care are un profil urban de 12 Km cu foarte multe opriri și porniri, precum în fig 7
[68]:
Fig.7 Profil de drum urban UDDS
Viteza depăşeşte rare ori 50Km/h, în cea mai mare parte situându-se în plaja 0-50Km/h.
Utilizând strategia propusă de ADVISOR, pe modelul clasic pentru arhitectura paralelă
având un motor termic de 41 de Kw și unul electric de 75 de Kw, am obţinut plecând cu un SOC
iniţial de 75%, un consum de 6.9l/100Km și un SOC final de 65%. Repetând acelaşi test cu noul
model în ceea ce priveşte controlul şi sursa auxiliară, în aceleaşi condiţii iniţiale, s-a obţinut un
consum de 6,2l/100Km și un SOC final de 69% pentru baterii și 85% pentru capacitoare.
Fig.8 Comparaţie între consumurile de combustibil și de energie
Rezultatele din tabel arată o îmbunătățire a consumului de combustibil, dar mai ales a
stării de încărcare a bateriilor la finalul testului.
Am luat în considerare şi cazul unui profil de drum extraurban CYC_CLEVELAND
(fig.9) [68]. Pe parcursul a 15 Km de trafic, autovehiculul este supus multor accelerări și
decelerări la viteze de peste 100Km/h. Prin aceasta, am vrut să fie simulată situaţia în care
șoferul întâmpină un trafic aglomerat pe autostradă și vrea să depăşească multe obstacole în
mişcare (alte vehicule), sau pentru simularea unui comportament sportiv chiar agresiv. Toate
aceste momente surprind foarte bine utilitatea semnificativă a supercapacitorilor, care vor fi
folosiţi cu precădere în aceste situaţii de extrem.
Fig. 9 CYC_CLEVELAND drive cycle
567
Consumcombustibil
SOC Final
Strategia orig
Strategia noua
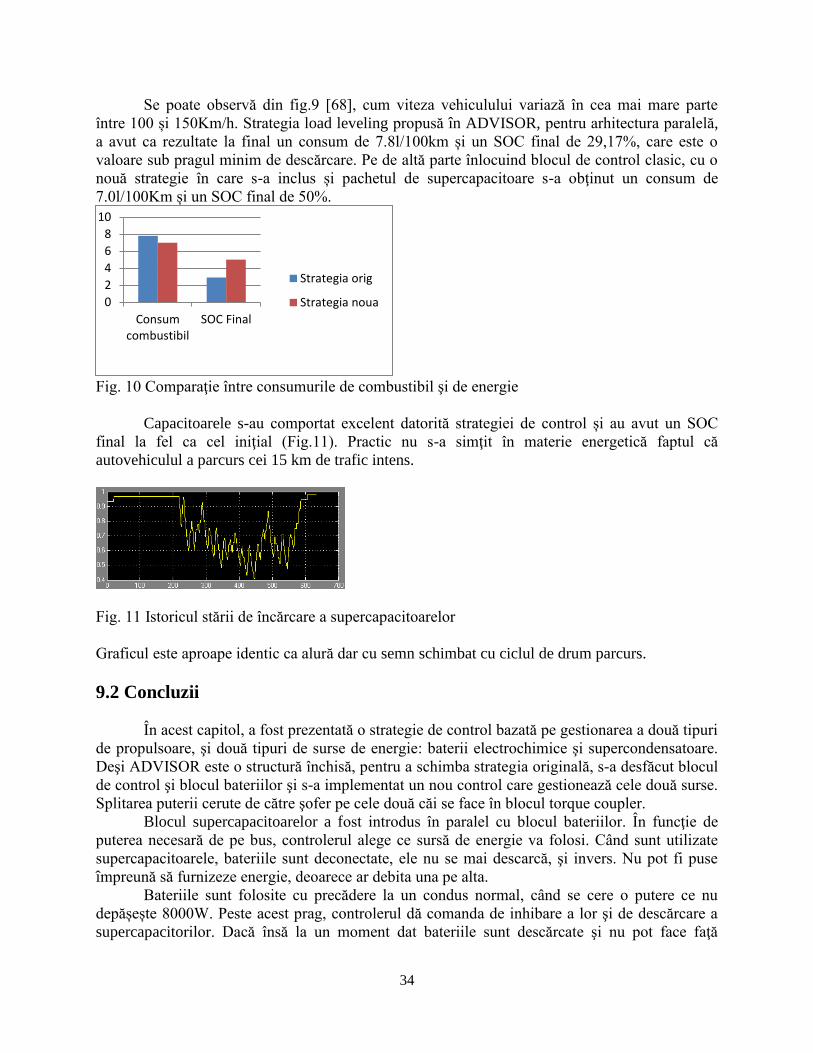
34
Se poate observă din fig.9 [68], cum viteza vehiculului variază în cea mai mare parte
între 100 și 150Km/h. Strategia load leveling propusă în ADVISOR, pentru arhitectura paralelă,
a avut ca rezultate la final un consum de 7.8l/100km și un SOC final de 29,17%, care este o
valoare sub pragul minim de descărcare. Pe de altă parte înlocuind blocul de control clasic, cu o
nouă strategie în care s-a inclus și pachetul de supercapacitoare s-a obţinut un consum de
7.0l/100Km și un SOC final de 50%.
Fig. 10 Comparaţie între consumurile de combustibil şi de energie
Capacitoarele s-au comportat excelent datorită strategiei de control și au avut un SOC
final la fel ca cel iniţial (Fig.11). Practic nu s-a simţit în materie energetică faptul că
autovehiculul a parcurs cei 15 km de trafic intens.
Fig. 11 Istoricul stării de încărcare a supercapacitoarelor
Graficul este aproape identic ca alură dar cu semn schimbat cu ciclul de drum parcurs.
9.2 Concluzii
În acest capitol, a fost prezentată o strategie de control bazată pe gestionarea a două tipuri
de propulsoare, şi două tipuri de surse de energie: baterii electrochimice şi supercondensatoare.
Deşi ADVISOR este o structură închisă, pentru a schimba strategia originală, s-a desfăcut blocul
de control şi blocul bateriilor şi s-a implementat un nou control care gestionează cele două surse.
Splitarea puterii cerute de către şofer pe cele două căi se face în blocul torque coupler.
Blocul supercapacitoarelor a fost introdus în paralel cu blocul bateriilor. În funcţie de
puterea necesară de pe bus, controlerul alege ce sursă de energie va folosi. Când sunt utilizate
supercapacitoarele, bateriile sunt deconectate, ele nu se mai descarcă, şi invers. Nu pot fi puse
împreună să furnizeze energie, deoarece ar debita una pe alta.
Bateriile sunt folosite cu precădere la un condus normal, când se cere o putere ce nu
depășește 8000W. Peste acest prag, controlerul dă comanda de inhibare a lor şi de descărcare a
supercapacitorilor. Dacă însă la un moment dat bateriile sunt descărcate şi nu pot face faţă
0
2
4
6
8
10
Consumcombustibil
SOC Final
Strategia orig
Strategia noua
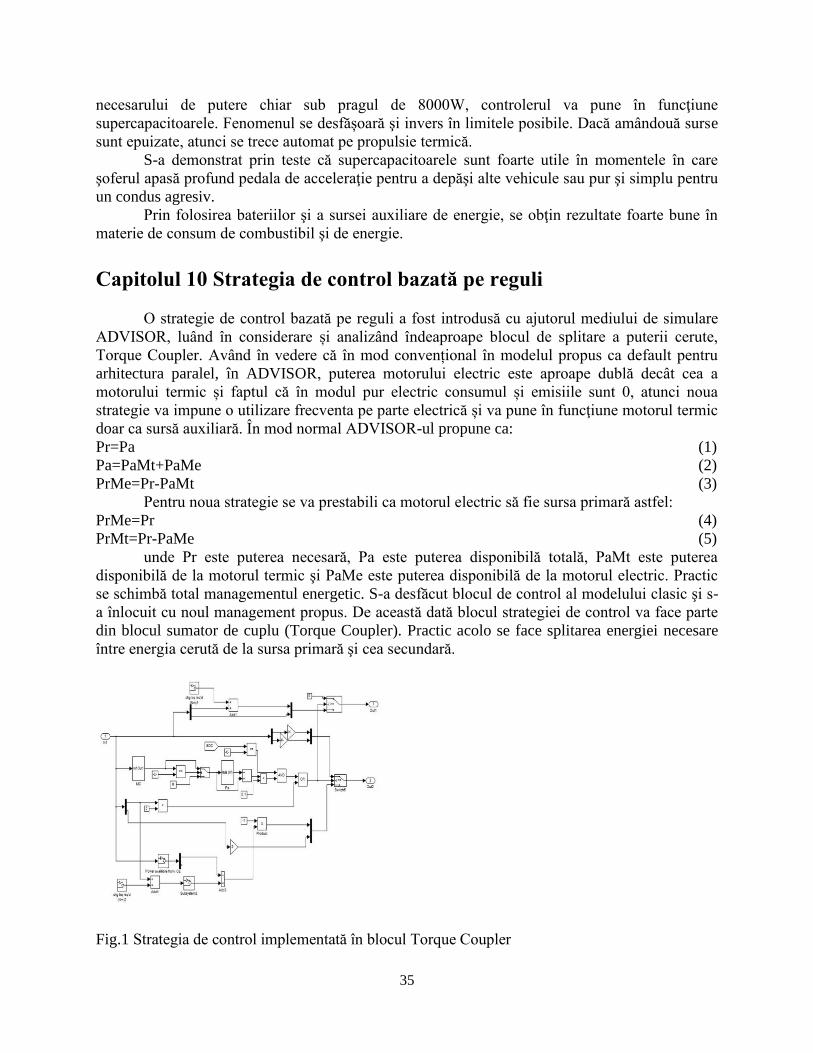
35
necesarului de putere chiar sub pragul de 8000W, controlerul va pune în funcţiune
supercapacitoarele. Fenomenul se desfășoară şi invers în limitele posibile. Dacă amândouă surse
sunt epuizate, atunci se trece automat pe propulsie termică.
S-a demonstrat prin teste că supercapacitoarele sunt foarte utile în momentele în care
şoferul apasă profund pedala de acceleraţie pentru a depăşi alte vehicule sau pur şi simplu pentru
un condus agresiv.
Prin folosirea bateriilor şi a sursei auxiliare de energie, se obţin rezultate foarte bune în
materie de consum de combustibil şi de energie.
Capitolul 10 Strategia de control bazată pe reguli
O strategie de control bazată pe reguli a fost introdusă cu ajutorul mediului de simulare
ADVISOR, luând în considerare și analizând îndeaproape blocul de splitare a puterii cerute,
Torque Coupler. Având în vedere că în mod convențional în modelul propus ca default pentru
arhitectura paralel, în ADVISOR, puterea motorului electric este aproape dublă decât cea a
motorului termic și faptul că în modul pur electric consumul și emisiile sunt 0, atunci noua
strategie va impune o utilizare frecventa pe parte electrică și va pune în funcţiune motorul termic
doar ca sursă auxiliară. În mod normal ADVISOR-ul propune ca:
Pr=Pa (1)
Pa=PaMt+PaMe (2)
PrMe=Pr-PaMt (3)
Pentru noua strategie se va prestabili ca motorul electric să fie sursa primară astfel:
PrMe=Pr (4)
PrMt=Pr-PaMe (5)
unde Pr este puterea necesară, Pa este puterea disponibilă totală, PaMt este puterea
disponibilă de la motorul termic şi PaMe este puterea disponibilă de la motorul electric. Practic
se schimbă total managementul energetic. S-a desfăcut blocul de control al modelului clasic şi s-
a înlocuit cu noul management propus. De această dată blocul strategiei de control va face parte
din blocul sumator de cuplu (Torque Coupler). Practic acolo se face splitarea energiei necesare
între energia cerută de la sursa primară şi cea secundară.
Fig.1 Strategia de control implementată în blocul Torque Coupler
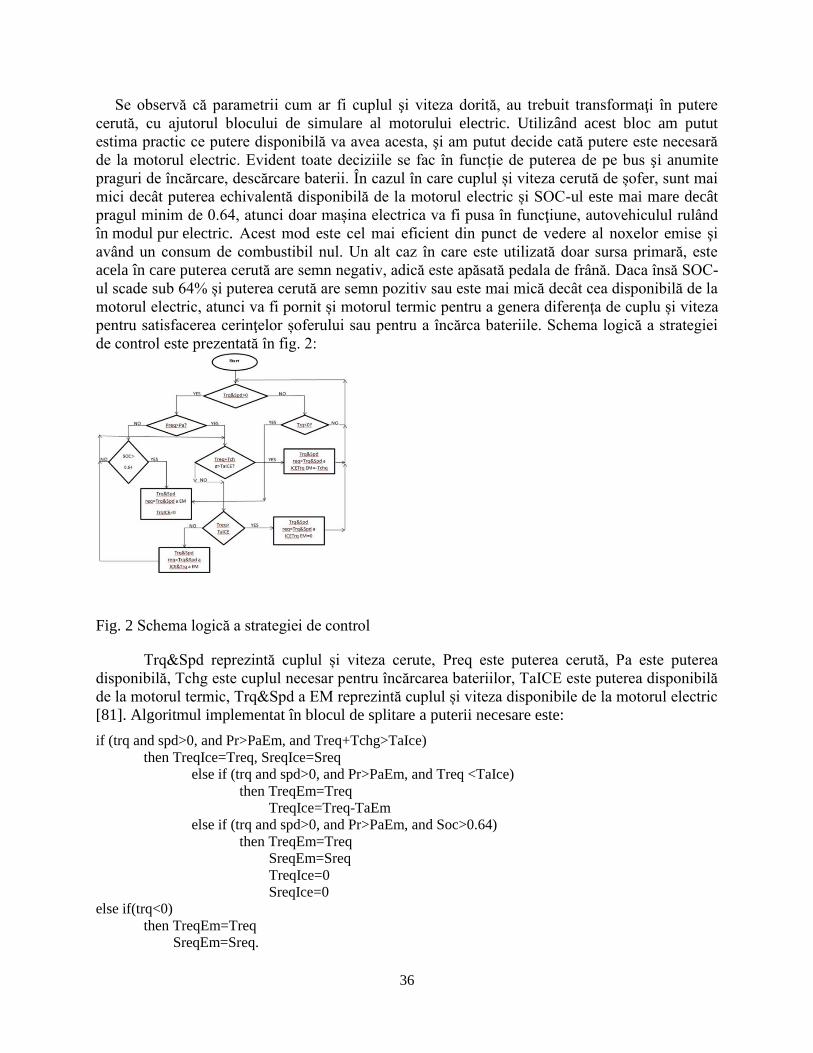
36
Se observă că parametrii cum ar fi cuplul şi viteza dorită, au trebuit transformaţi în putere
cerută, cu ajutorul blocului de simulare al motorului electric. Utilizând acest bloc am putut
estima practic ce putere disponibilă va avea acesta, şi am putut decide cată putere este necesară
de la motorul electric. Evident toate deciziile se fac în funcție de puterea de pe bus şi anumite
praguri de încărcare, descărcare baterii. În cazul în care cuplul și viteza cerută de șofer, sunt mai
mici decât puterea echivalentă disponibilă de la motorul electric și SOC-ul este mai mare decât
pragul minim de 0.64, atunci doar mașina electrica va fi pusa în funcţiune, autovehiculul rulând
în modul pur electric. Acest mod este cel mai eficient din punct de vedere al noxelor emise şi
având un consum de combustibil nul. Un alt caz în care este utilizată doar sursa primară, este
acela în care puterea cerută are semn negativ, adică este apăsată pedala de frână. Daca însă SOC-
ul scade sub 64% și puterea cerută are semn pozitiv sau este mai mică decât cea disponibilă de la
motorul electric, atunci va fi pornit și motorul termic pentru a genera diferenţa de cuplu și viteza
pentru satisfacerea cerinţelor șoferului sau pentru a încărca bateriile. Schema logică a strategiei
de control este prezentată în fig. 2:
Fig. 2 Schema logică a strategiei de control
Trq&Spd reprezintă cuplul și viteza cerute, Preq este puterea cerută, Pa este puterea
disponibilă, Tchg este cuplul necesar pentru încărcarea bateriilor, TaICE este puterea disponibilă
de la motorul termic, Trq&Spd a EM reprezintă cuplul și viteza disponibile de la motorul electric
[81]. Algoritmul implementat în blocul de splitare a puterii necesare este:
if (trq and spd>0, and Pr>PaEm, and Treq+Tchg>TaIce)
then TreqIce=Treq, SreqIce=Sreq
else if (trq and spd>0, and Pr>PaEm, and Treq <TaIce)
then TreqEm=Treq
TreqIce=Treq-TaEm
else if (trq and spd>0, and Pr>PaEm, and Soc>0.64)
then TreqEm=Treq
SreqEm=Sreq
TreqIce=0
SreqIce=0
else if(trq<0)
then TreqEm=Treq
SreqEm=Sreq.
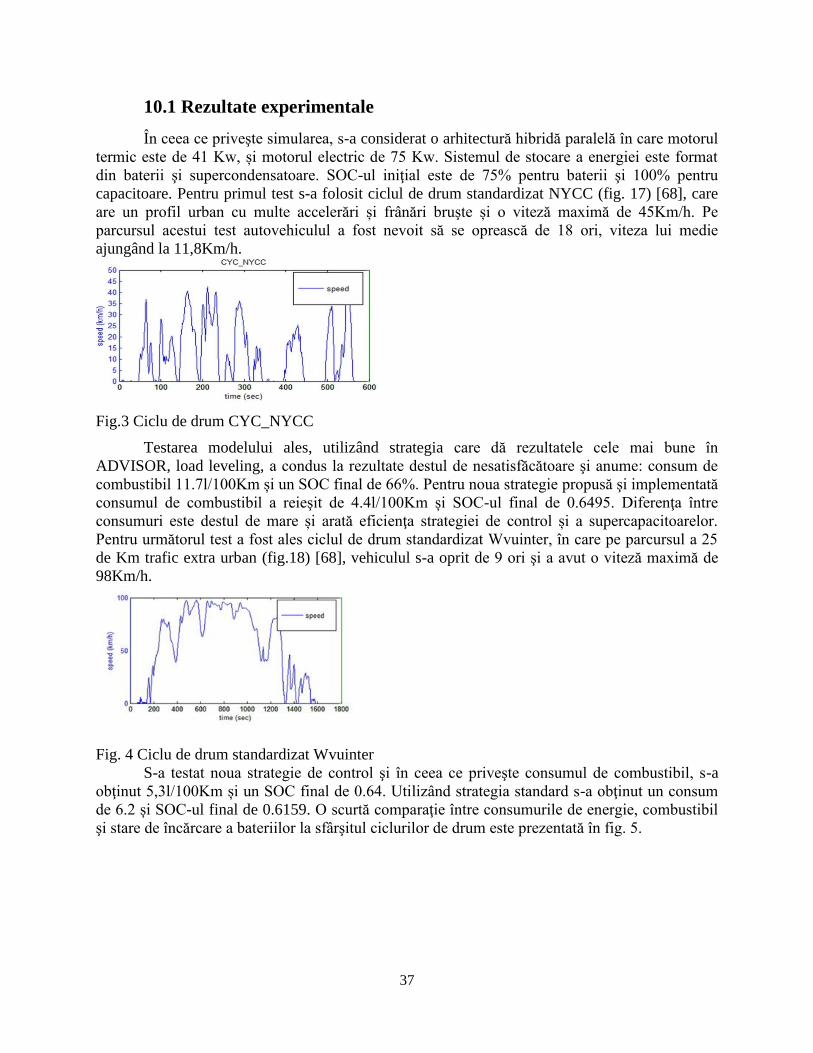
37
10.1 Rezultate experimentale
În ceea ce priveşte simularea, s-a considerat o arhitectură hibridă paralelă în care motorul
termic este de 41 Kw, și motorul electric de 75 Kw. Sistemul de stocare a energiei este format
din baterii şi supercondensatoare. SOC-ul iniţial este de 75% pentru baterii şi 100% pentru
capacitoare. Pentru primul test s-a folosit ciclul de drum standardizat NYCC (fig. 17) [68], care
are un profil urban cu multe accelerări și frânări bruşte și o viteză maximă de 45Km/h. Pe
parcursul acestui test autovehiculul a fost nevoit să se oprească de 18 ori, viteza lui medie
ajungând la 11,8Km/h.
Fig.3 Ciclu de drum CYC_NYCC
Testarea modelului ales, utilizând strategia care dă rezultatele cele mai bune în
ADVISOR, load leveling, a condus la rezultate destul de nesatisfăcătoare şi anume: consum de
combustibil 11.7l/100Km și un SOC final de 66%. Pentru noua strategie propusă şi implementată
consumul de combustibil a reieşit de 4.4l/100Km și SOC-ul final de 0.6495. Diferenţa între
consumuri este destul de mare și arată eficienţa strategiei de control și a supercapacitoarelor.
Pentru următorul test a fost ales ciclul de drum standardizat Wvuinter, în care pe parcursul a 25
de Km trafic extra urban (fig.18) [68], vehiculul s-a oprit de 9 ori şi a avut o viteză maximă de
98Km/h.
Fig. 4 Ciclu de drum standardizat Wvuinter
S-a testat noua strategie de control şi în ceea ce priveşte consumul de combustibil, s-a
obţinut 5,3l/100Km și un SOC final de 0.64. Utilizând strategia standard s-a obţinut un consum
de 6.2 și SOC-ul final de 0.6159. O scurtă comparaţie între consumurile de energie, combustibil
şi stare de încărcare a bateriilor la sfârşitul ciclurilor de drum este prezentată în fig. 5.
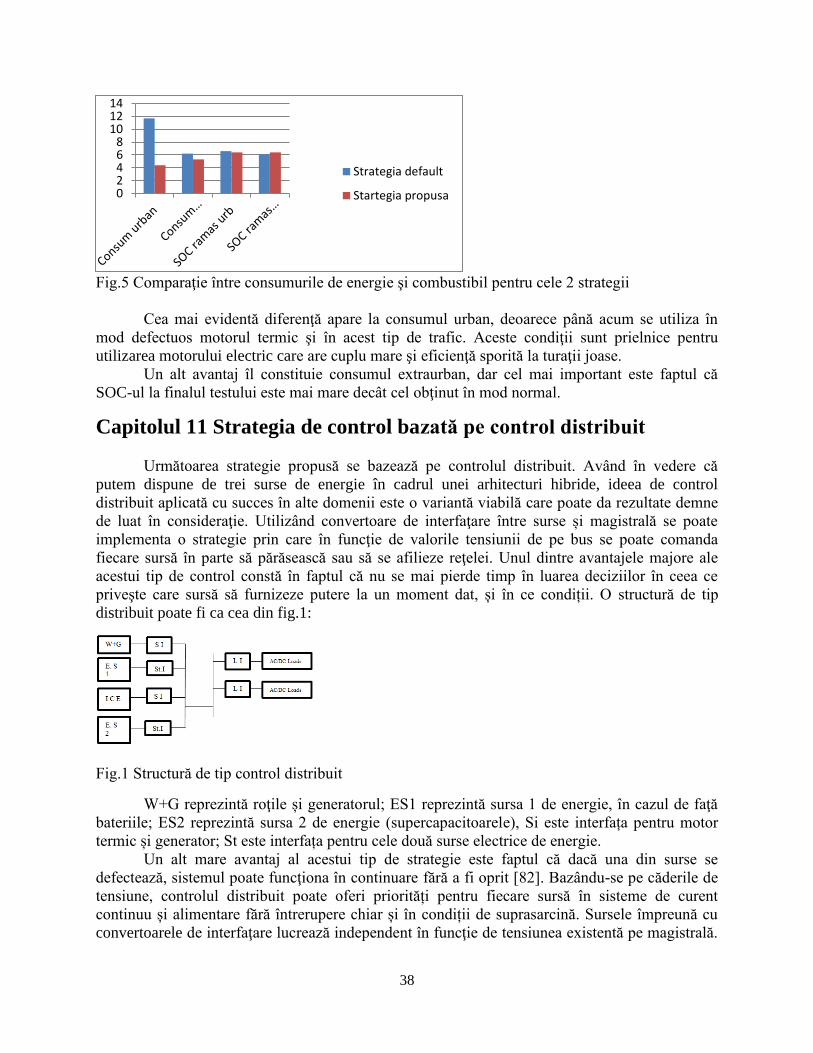
38
Fig.5 Comparaţie între consumurile de energie şi combustibil pentru cele 2 strategii
Cea mai evidentă diferenţă apare la consumul urban, deoarece până acum se utiliza în
mod defectuos motorul termic şi în acest tip de trafic. Aceste condiţii sunt prielnice pentru
utilizarea motorului electric care are cuplu mare şi eficienţă sporită la turaţii joase.
Un alt avantaj îl constituie consumul extraurban, dar cel mai important este faptul că
SOC-ul la finalul testului este mai mare decât cel obţinut în mod normal.
Capitolul 11 Strategia de control bazată pe control distribuit
Următoarea strategie propusă se bazează pe controlul distribuit. Având în vedere că
putem dispune de trei surse de energie în cadrul unei arhitecturi hibride, ideea de control
distribuit aplicată cu succes în alte domenii este o variantă viabilă care poate da rezultate demne
de luat în consideraţie. Utilizând convertoare de interfaţare între surse și magistrală se poate
implementa o strategie prin care în funcţie de valorile tensiunii de pe bus se poate comanda
fiecare sursă în parte să părăsească sau să se afilieze reţelei. Unul dintre avantajele majore ale
acestui tip de control constă în faptul că nu se mai pierde timp în luarea deciziilor în ceea ce
priveşte care sursă să furnizeze putere la un moment dat, și în ce condiții. O structură de tip
distribuit poate fi ca cea din fig.1:
Fig.1 Structură de tip control distribuit
W+G reprezintă roţile și generatorul; ES1 reprezintă sursa 1 de energie, în cazul de faţă
bateriile; ES2 reprezintă sursa 2 de energie (supercapacitoarele), Si este interfața pentru motor
termic și generator; St este interfața pentru cele două surse electrice de energie.
Un alt mare avantaj al acestui tip de strategie este faptul că dacă una din surse se
defectează, sistemul poate funcţiona în continuare fără a fi oprit [82]. Bazându-se pe căderile de
tensiune, controlul distribuit poate oferi priorități pentru fiecare sursă în sisteme de curent
continuu și alimentare fără întrerupere chiar și în condiții de suprasarcină. Sursele împreună cu
convertoarele de interfaţare lucrează independent în funcţie de tensiunea existentă pe magistrală.
02468
101214
Strategia default
Startegia propusa
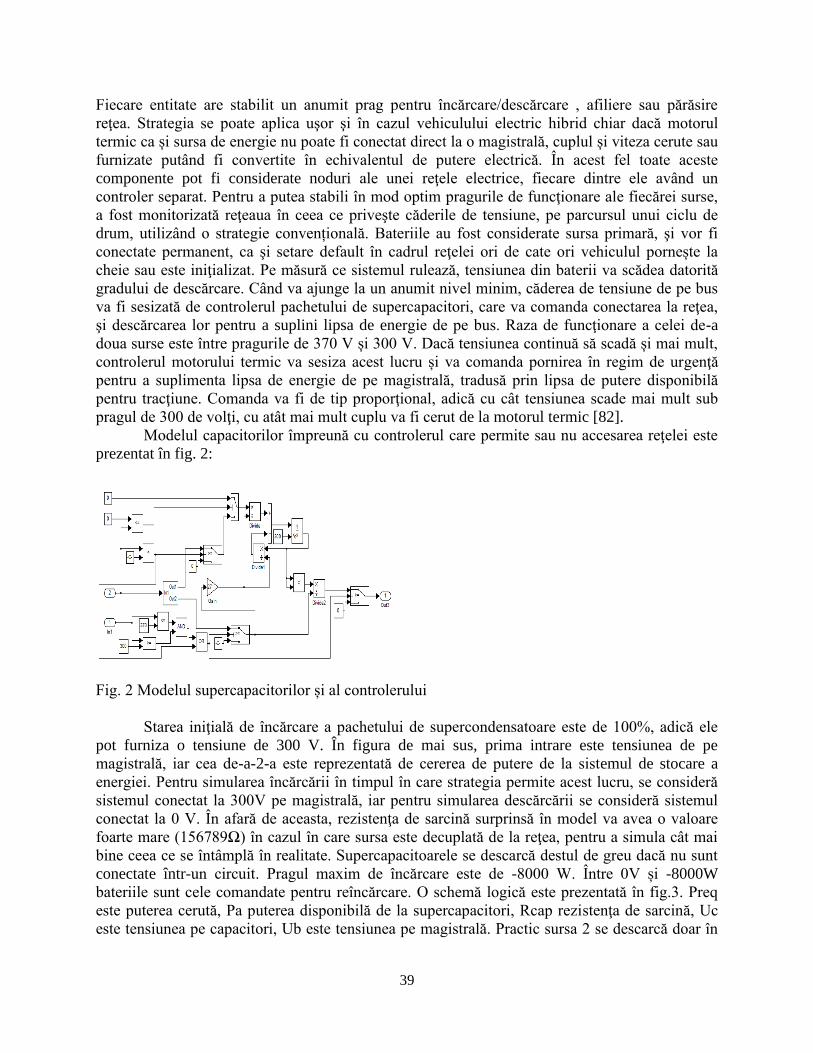
39
Fiecare entitate are stabilit un anumit prag pentru încărcare/descărcare , afiliere sau părăsire
reţea. Strategia se poate aplica uşor şi în cazul vehiculului electric hibrid chiar dacă motorul
termic ca și sursa de energie nu poate fi conectat direct la o magistrală, cuplul și viteza cerute sau
furnizate putând fi convertite în echivalentul de putere electrică. În acest fel toate aceste
componente pot fi considerate noduri ale unei reţele electrice, fiecare dintre ele având un
controler separat. Pentru a putea stabili în mod optim pragurile de funcţionare ale fiecărei surse,
a fost monitorizată reţeaua în ceea ce priveşte căderile de tensiune, pe parcursul unui ciclu de
drum, utilizând o strategie convențională. Bateriile au fost considerate sursa primară, şi vor fi
conectate permanent, ca şi setare default în cadrul reţelei ori de cate ori vehiculul pornește la
cheie sau este iniţializat. Pe măsură ce sistemul rulează, tensiunea din baterii va scădea datorită
gradului de descărcare. Când va ajunge la un anumit nivel minim, căderea de tensiune de pe bus
va fi sesizată de controlerul pachetului de supercapacitori, care va comanda conectarea la reţea,
şi descărcarea lor pentru a suplini lipsa de energie de pe bus. Raza de funcţionare a celei de-a
doua surse este între pragurile de 370 V și 300 V. Dacă tensiunea continuă să scadă și mai mult,
controlerul motorului termic va sesiza acest lucru și va comanda pornirea în regim de urgenţă
pentru a suplimenta lipsa de energie de pe magistrală, tradusă prin lipsa de putere disponibilă
pentru tracţiune. Comanda va fi de tip proporţional, adică cu cât tensiunea scade mai mult sub
pragul de 300 de volţi, cu atât mai mult cuplu va fi cerut de la motorul termic [82].
Modelul capacitorilor împreună cu controlerul care permite sau nu accesarea reţelei este
prezentat în fig. 2:
Fig. 2 Modelul supercapacitorilor și al controlerului
Starea iniţială de încărcare a pachetului de supercondensatoare este de 100%, adică ele
pot furniza o tensiune de 300 V. În figura de mai sus, prima intrare este tensiunea de pe
magistrală, iar cea de-a-2-a este reprezentată de cererea de putere de la sistemul de stocare a
energiei. Pentru simularea încărcării în timpul în care strategia permite acest lucru, se consideră
sistemul conectat la 300V pe magistrală, iar pentru simularea descărcării se consideră sistemul
conectat la 0 V. În afară de aceasta, rezistenţa de sarcină surprinsă în model va avea o valoare
foarte mare (156789Ω) în cazul în care sursa este decuplată de la reţea, pentru a simula cât mai
bine ceea ce se întâmplă în realitate. Supercapacitoarele se descarcă destul de greu dacă nu sunt
conectate într-un circuit. Pragul maxim de încărcare este de -8000 W. Între 0V și -8000W
bateriile sunt cele comandate pentru reîncărcare. O schemă logică este prezentată în fig.3. Preq
este puterea cerută, Pa puterea disponibilă de la supercapacitori, Rcap rezistenţa de sarcină, Uc
este tensiunea pe capacitori, Ub este tensiunea pe magistrală. Practic sursa 2 se descarcă doar în
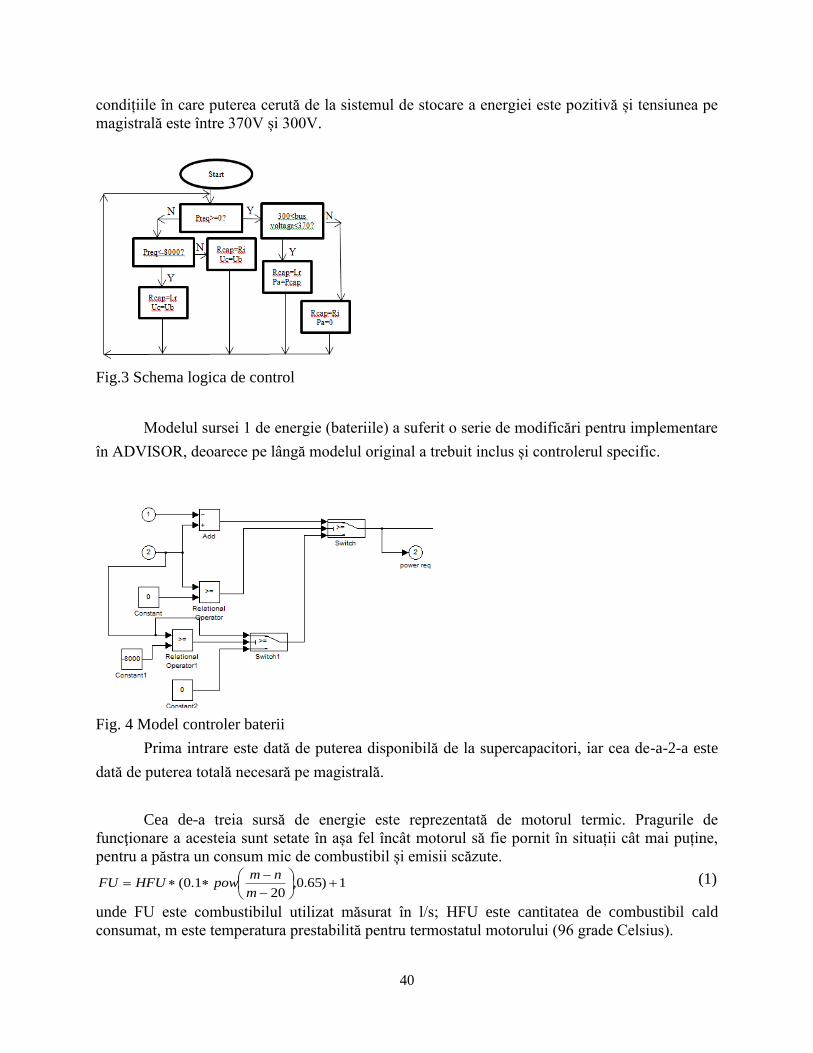
40
condițiile în care puterea cerută de la sistemul de stocare a energiei este pozitivă și tensiunea pe
magistrală este între 370V și 300V.
Fig.3 Schema logica de control
Modelul sursei 1 de energie (bateriile) a suferit o serie de modificări pentru implementare
în ADVISOR, deoarece pe lângă modelul original a trebuit inclus și controlerul specific.
Fig. 4 Model controler baterii
Prima intrare este dată de puterea disponibilă de la supercapacitori, iar cea de-a-2-a este
dată de puterea totală necesară pe magistrală.
Cea de-a treia sursă de energie este reprezentată de motorul termic. Pragurile de
funcţionare a acesteia sunt setate în așa fel încât motorul să fie pornit în situații cât mai puține,
pentru a păstra un consum mic de combustibil și emisii scăzute.
1)65.0,20
1.0(
m
nmpowHFUFU (1)
unde FU este combustibilul utilizat măsurat în l/s; HFU este cantitatea de combustibil cald
consumat, m este temperatura prestabilită pentru termostatul motorului (96 grade Celsius).
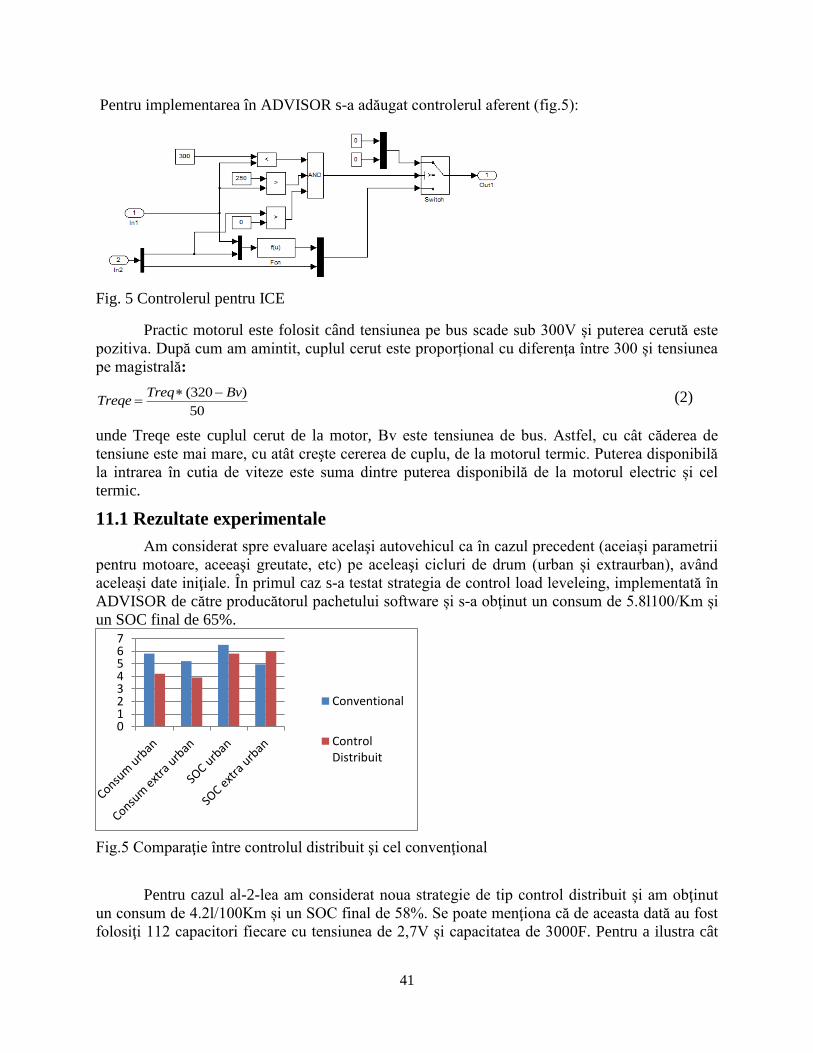
41
Pentru implementarea în ADVISOR s-a adăugat controlerul aferent (fig.5):
Fig. 5 Controlerul pentru ICE
Practic motorul este folosit când tensiunea pe bus scade sub 300V și puterea cerută este
pozitiva. După cum am amintit, cuplul cerut este proporțional cu diferenţa între 300 și tensiunea
pe magistrală:
50
)320( BvTreqTreqe
(2)
unde Treqe este cuplul cerut de la motor, Bv este tensiunea de bus. Astfel, cu cât căderea de
tensiune este mai mare, cu atât creşte cererea de cuplu, de la motorul termic. Puterea disponibilă
la intrarea în cutia de viteze este suma dintre puterea disponibilă de la motorul electric și cel
termic.
11.1 Rezultate experimentale
Am considerat spre evaluare acelaşi autovehicul ca în cazul precedent (aceiași parametrii
pentru motoare, aceeaşi greutate, etc) pe aceleaşi cicluri de drum (urban și extraurban), având
aceleași date iniţiale. În primul caz s-a testat strategia de control load leveleing, implementată în
ADVISOR de către producătorul pachetului software și s-a obţinut un consum de 5.8l100/Km și
un SOC final de 65%.
Fig.5 Comparaţie între controlul distribuit şi cel convenţional
Pentru cazul al-2-lea am considerat noua strategie de tip control distribuit și am obţinut
un consum de 4.2l/100Km și un SOC final de 58%. Se poate menţiona că de aceasta dată au fost
folosiţi 112 capacitori fiecare cu tensiunea de 2,7V și capacitatea de 3000F. Pentru a ilustra cât
01234567
Conventional
ControlDistribuit
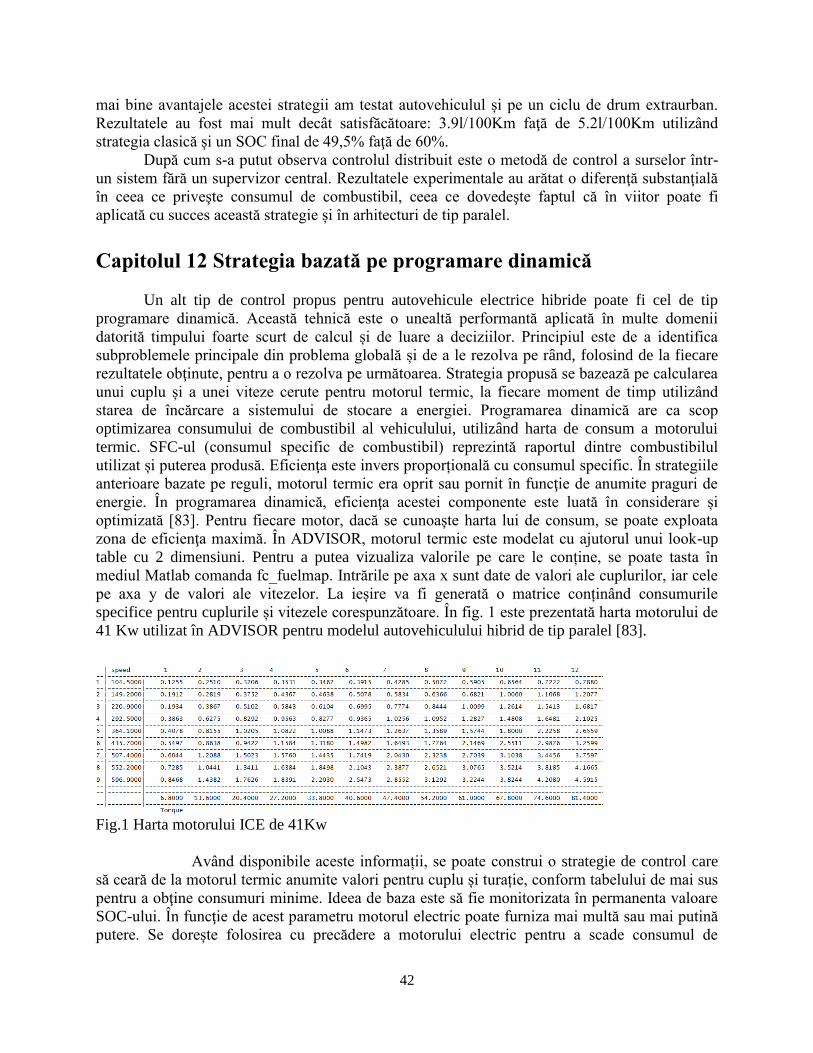
42
mai bine avantajele acestei strategii am testat autovehiculul și pe un ciclu de drum extraurban.
Rezultatele au fost mai mult decât satisfăcătoare: 3.9l/100Km faţă de 5.2l/100Km utilizând
strategia clasică și un SOC final de 49,5% faţă de 60%.
După cum s-a putut observa controlul distribuit este o metodă de control a surselor într-
un sistem fără un supervizor central. Rezultatele experimentale au arătat o diferenţă substanţială
în ceea ce priveşte consumul de combustibil, ceea ce dovedeşte faptul că în viitor poate fi
aplicată cu succes această strategie și în arhitecturi de tip paralel.
Capitolul 12 Strategia bazată pe programare dinamică
Un alt tip de control propus pentru autovehicule electrice hibride poate fi cel de tip
programare dinamică. Această tehnică este o unealtă performantă aplicată în multe domenii
datorită timpului foarte scurt de calcul și de luare a deciziilor. Principiul este de a identifica
subproblemele principale din problema globală și de a le rezolva pe rând, folosind de la fiecare
rezultatele obţinute, pentru a o rezolva pe următoarea. Strategia propusă se bazează pe calcularea
unui cuplu și a unei viteze cerute pentru motorul termic, la fiecare moment de timp utilizând
starea de încărcare a sistemului de stocare a energiei. Programarea dinamică are ca scop
optimizarea consumului de combustibil al vehiculului, utilizând harta de consum a motorului
termic. SFC-ul (consumul specific de combustibil) reprezintă raportul dintre combustibilul
utilizat și puterea produsă. Eficienţa este invers proporțională cu consumul specific. În strategiile
anterioare bazate pe reguli, motorul termic era oprit sau pornit în funcţie de anumite praguri de
energie. În programarea dinamică, eficienţa acestei componente este luată în considerare și
optimizată [83]. Pentru fiecare motor, dacă se cunoaște harta lui de consum, se poate exploata
zona de eficienţa maximă. În ADVISOR, motorul termic este modelat cu ajutorul unui look-up
table cu 2 dimensiuni. Pentru a putea vizualiza valorile pe care le conține, se poate tasta în
mediul Matlab comanda fc_fuelmap. Intrările pe axa x sunt date de valori ale cuplurilor, iar cele
pe axa y de valori ale vitezelor. La ieșire va fi generată o matrice conținând consumurile
specifice pentru cuplurile și vitezele corespunzătoare. În fig. 1 este prezentată harta motorului de
41 Kw utilizat în ADVISOR pentru modelul autovehiculului hibrid de tip paralel [83].
Fig.1 Harta motorului ICE de 41Kw
Având disponibile aceste informații, se poate construi o strategie de control care
să ceară de la motorul termic anumite valori pentru cuplu și turație, conform tabelului de mai sus
pentru a obţine consumuri minime. Ideea de baza este să fie monitorizata în permanenta valoare
SOC-ului. În funcţie de acest parametru motorul electric poate furniza mai multă sau mai putină
putere. Se dorește folosirea cu precădere a motorului electric pentru a scade consumul de
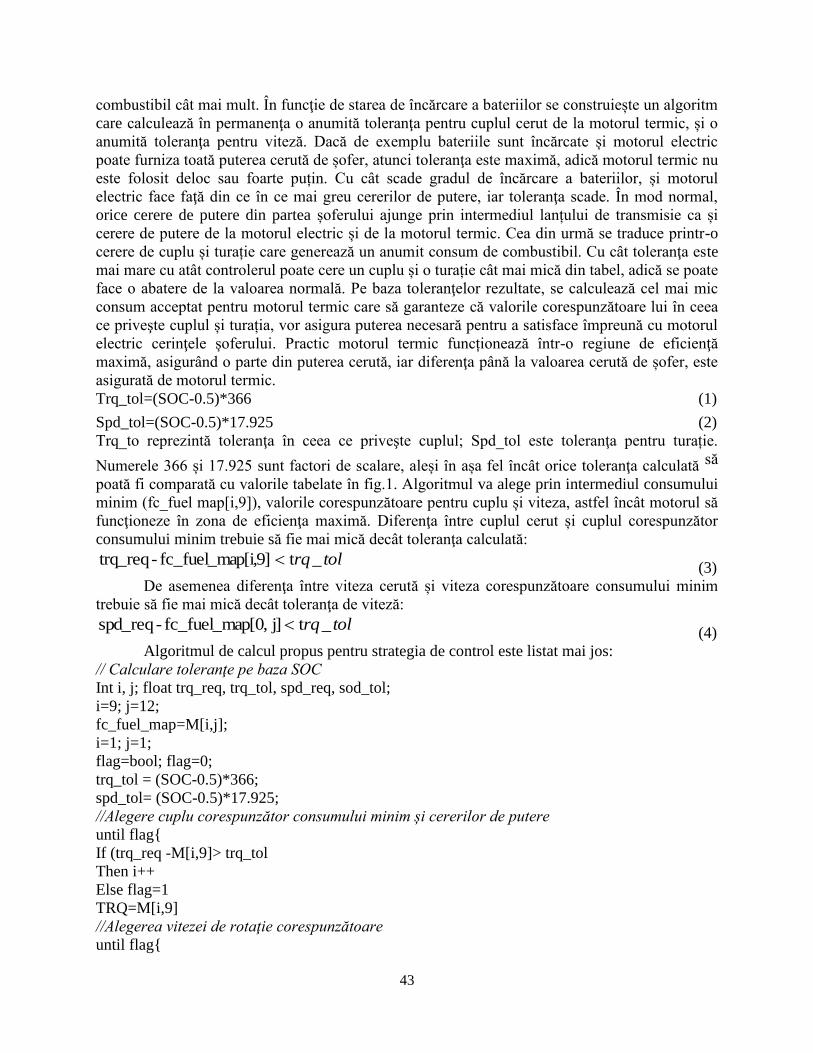
43
combustibil cât mai mult. În funcţie de starea de încărcare a bateriilor se construiește un algoritm
care calculează în permanenţa o anumită toleranţa pentru cuplul cerut de la motorul termic, și o
anumită toleranţa pentru viteză. Dacă de exemplu bateriile sunt încărcate și motorul electric
poate furniza toată puterea cerută de șofer, atunci toleranţa este maximă, adică motorul termic nu
este folosit deloc sau foarte puțin. Cu cât scade gradul de încărcare a bateriilor, și motorul
electric face faţă din ce în ce mai greu cererilor de putere, iar toleranţa scade. În mod normal,
orice cerere de putere din partea șoferului ajunge prin intermediul lanțului de transmisie ca și
cerere de putere de la motorul electric și de la motorul termic. Cea din urmă se traduce printr-o
cerere de cuplu și turație care generează un anumit consum de combustibil. Cu cât toleranţa este
mai mare cu atât controlerul poate cere un cuplu și o turație cât mai mică din tabel, adică se poate
face o abatere de la valoarea normală. Pe baza toleranţelor rezultate, se calculează cel mai mic
consum acceptat pentru motorul termic care să garanteze că valorile corespunzătoare lui în ceea
ce priveşte cuplul și turația, vor asigura puterea necesară pentru a satisface împreună cu motorul
electric cerinţele șoferului. Practic motorul termic funcționează într-o regiune de eficienţă
maximă, asigurând o parte din puterea cerută, iar diferenţa până la valoarea cerută de șofer, este
asigurată de motorul termic.
Trq_tol=(SOC-0.5)*366 (1)
Spd_tol=(SOC-0.5)*17.925 (2)
Trq_to reprezintă toleranţa în ceea ce priveşte cuplul; Spd_tol este toleranţa pentru turație.
Numerele 366 și 17.925 sunt factori de scalare, aleși în așa fel încât orice toleranţa calculată să
poată fi comparată cu valorile tabelate în fig.1. Algoritmul va alege prin intermediul consumului
minim (fc_fuel map[i,9]), valorile corespunzătoare pentru cuplu și viteza, astfel încât motorul să
funcţioneze în zona de eficienţa maximă. Diferenţa între cuplul cerut și cuplul corespunzător
consumului minim trebuie să fie mai mică decât toleranţa calculată: tolrq_t p[i,9]fc_fuel_ma-trq_req
(3)
De asemenea diferenţa între viteza cerută și viteza corespunzătoare consumului minim
trebuie să fie mai mică decât toleranţa de viteză:
tolrq_t j]p[0,fc_fuel_ma-spd_req (4)
Algoritmul de calcul propus pentru strategia de control este listat mai jos:
// Calculare toleranţe pe baza SOC
Int i, j; float trq_req, trq_tol, spd_req, sod_tol;
i=9; j=12;
fc_fuel_map=M[i,j];
i=1; j=1;
flag=bool; flag=0;
trq_tol = (SOC-0.5)*366;
spd_tol= (SOC-0.5)*17.925;
//Alegere cuplu corespunzător consumului minim și cererilor de putere
until flag
If (trq_req -M[i,9]> trq_tol
Then i++
Else flag=1
TRQ=M[i,9]
//Alegerea vitezei de rotaţie corespunzătoare
until flag
44
If (spd_req-M[1,j]>spd_tol then j++
Else flag=1
Rpm=M[0,j]
//Verificarea dacă consumul ales este cel mai mic în condiţiile date
if M[i,j]>M[i+1,j] then i++; TRQ=M[i,9]
if M[i,j]>M[i,j+1] then
j++
Rpm=M[0,j]
Acest algoritm propus, va fi pus în aplicare de către controlerul vehiculului, dacă cuplul
cerut este pozitiv și toleranţa corespunzătoare lui este sub 65. Dacă valoarea calculată este peste
acest prag atunci vehiculul poate funcţiona în modul pur electric.
12.1 Rezultate experimentale
Am ales pentru primul test ciclul de drum urban UDDS. Modelul testat este o arhitectură
hibridă de tip paralel cu un motor termic de 41 Kw, 25 de module baterii pe bază de plumb,
tensiune nominală 308 V, și un motor electric de 75Kw. La final, autovehiculul testat având ca și
strategie de control pe cea folosită în ADVISOR, utilizată pentru comparaţie şi în capitolele
anterioare, a avut un consum de 5,8l/100Km și un SOC final de 65%, ca în fig.2[68].
t(s)
Fig. 2 Istoricul consumului de energie
Fig.3 Comparaţie între controlul prin programare dinamică şi cel convenţional
În cazul al doilea a fost testat modelul ce a avut implementat în controler strategia de
control bazată pe programare dinamică. Au fost făcute și câteva modificări în ceea ce priveşte
arhitectura, adică au fost adăugate 112 supercapacitoare, fiecare cu o tensiune nominală de 2,7 V,
o greutate de 0,5 Kg, o capacitate de 3000F și un preț de 230 USD. Curentul maxim suportat de
fiecare celula este de 230A. Dacă sunt conectați în serie vor forma un pachet care va furniza o
tensiune de 300 de volți și va avea o capacitate de 26,78 F. Pentru simulare s-a luat în
considerare și faptul că acest pachet va însemna o încărcătură de 50 Kg în plus faţă de greutatea
01234567
Strategiaconventionala
Strategia propusa
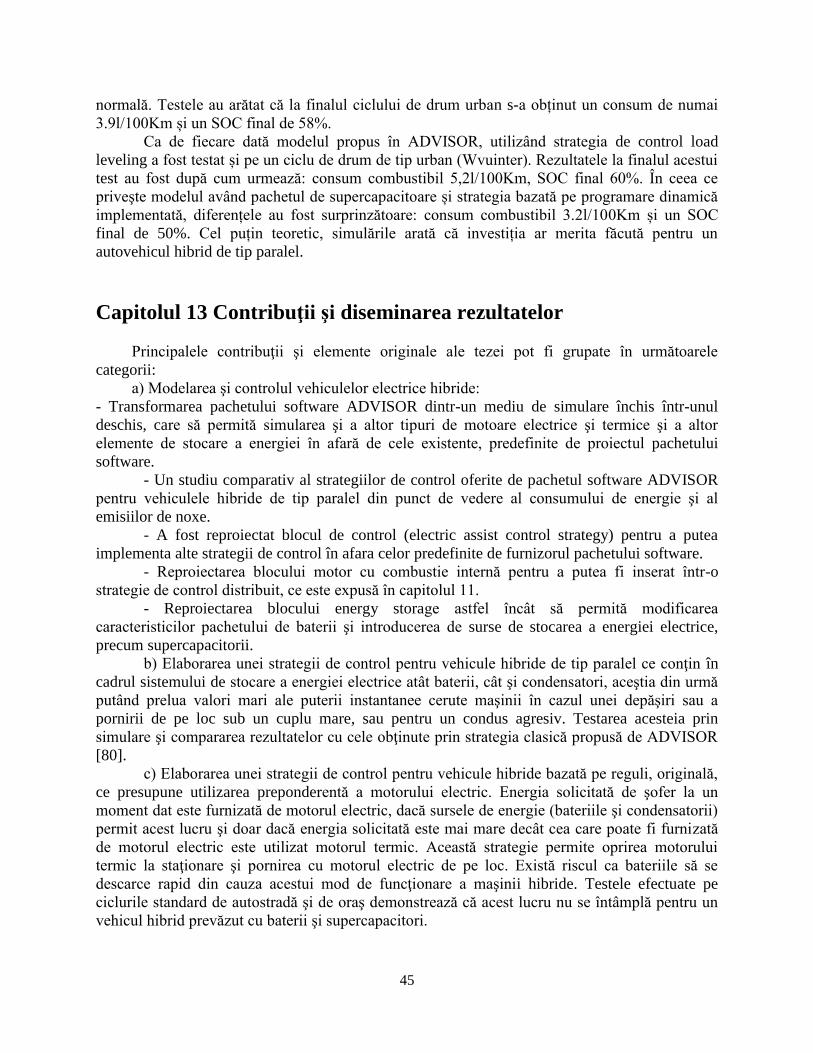
45
normală. Testele au arătat că la finalul ciclului de drum urban s-a obținut un consum de numai
3.9l/100Km și un SOC final de 58%.
Ca de fiecare dată modelul propus în ADVISOR, utilizând strategia de control load
leveling a fost testat și pe un ciclu de drum de tip urban (Wvuinter). Rezultatele la finalul acestui
test au fost după cum urmează: consum combustibil 5,2l/100Km, SOC final 60%. În ceea ce
priveşte modelul având pachetul de supercapacitoare și strategia bazată pe programare dinamică
implementată, diferențele au fost surprinzătoare: consum combustibil 3.2l/100Km și un SOC
final de 50%. Cel puțin teoretic, simulările arată că investiția ar merita făcută pentru un
autovehicul hibrid de tip paralel.
Capitolul 13 Contribuţii şi diseminarea rezultatelor
Principalele contribuţii şi elemente originale ale tezei pot fi grupate în următoarele
categorii:
a) Modelarea şi controlul vehiculelor electrice hibride:
- Transformarea pachetului software ADVISOR dintr-un mediu de simulare închis într-unul
deschis, care să permită simularea şi a altor tipuri de motoare electrice şi termice şi a altor
elemente de stocare a energiei în afară de cele existente, predefinite de proiectul pachetului
software.
- Un studiu comparativ al strategiilor de control oferite de pachetul software ADVISOR
pentru vehiculele hibride de tip paralel din punct de vedere al consumului de energie şi al
emisiilor de noxe.
- A fost reproiectat blocul de control (electric assist control strategy) pentru a putea
implementa alte strategii de control în afara celor predefinite de furnizorul pachetului software.
- Reproiectarea blocului motor cu combustie internă pentru a putea fi inserat într-o
strategie de control distribuit, ce este expusă în capitolul 11.
- Reproiectarea blocului energy storage astfel încât să permită modificarea
caracteristicilor pachetului de baterii şi introducerea de surse de stocarea a energiei electrice,
precum supercapacitorii.
b) Elaborarea unei strategii de control pentru vehicule hibride de tip paralel ce conţin în
cadrul sistemului de stocare a energiei electrice atât baterii, cât şi condensatori, aceştia din urmă
putând prelua valori mari ale puterii instantanee cerute maşinii în cazul unei depăşiri sau a
pornirii de pe loc sub un cuplu mare, sau pentru un condus agresiv. Testarea acesteia prin
simulare şi compararea rezultatelor cu cele obţinute prin strategia clasică propusă de ADVISOR
[80].
c) Elaborarea unei strategii de control pentru vehicule hibride bazată pe reguli, originală,
ce presupune utilizarea preponderentă a motorului electric. Energia solicitată de şofer la un
moment dat este furnizată de motorul electric, dacă sursele de energie (bateriile şi condensatorii)
permit acest lucru şi doar dacă energia solicitată este mai mare decât cea care poate fi furnizată
de motorul electric este utilizat motorul termic. Această strategie permite oprirea motorului
termic la staţionare şi pornirea cu motorul electric de pe loc. Există riscul ca bateriile să se
descarce rapid din cauza acestui mod de funcţionare a maşinii hibride. Testele efectuate pe
ciclurile standard de autostradă şi de oraş demonstrează că acest lucru nu se întâmplă pentru un
vehicul hibrid prevăzut cu baterii şi supercapacitori.

46
d) Elaborarea unei strategii de control pentru vehicule hibride de tip paralel utilizând o
metodă de control distribuit. Metoda se bazează pe controlul unei reţele electrice formată din
surse de energie şi consumatori în funcţie de tensiunea busului de DC. De remarcat că în cazul
unui vehicul hibrid motorul electric poate fi atât consumator (în regim de generator) cât şi sursă
de energie. Pentru a putea aplica această metodă a fost conceput un bloc care să genereze o
tensiune de bus echivalentă corespunzătoare motorului termic pornind de la viteza instantanee şi
cuplul cerut.
e) Elaborarea unei strategii de control pentru vehicule hibride bazată pe programare
dinamică. Obiectivul este minimizarea consumului de combustibil. Motorul termic este un sistem
neliniar şi este descris de producătorul motorului printr-o hartă a motorului bidimensională.
Această hartă este echivalentă cu un look-up table 2D, având ca intrări turaţia şi cuplul, iar ca
ieşire consumul de combustibil. A fost conceput un algoritm care să selecteze în orice moment
varianta de consum minim pentru motorul termic, diferenţa de cuplu necesar la un moment dat
fiind asigurată de motorul electric, daca sursa de energie a acestuia permite acest lucru.
Toate aceste tehnici de control vin în sprijinul vehiculelor hibride pentru proteja mediul
înconjurător oferind generațiilor viitoare, condiții cel puțin la fel de prietenoase precum au fost
până acum.
Rezultatele cercetărilor doctorale au fost prezentate in 7 lucrări publicate sau acceptate
spre publicare dintre care 2 lucrări la conferințe internaționale ISI Proceedings 3 in reviste
indexate IEEE Xplore si 2 în reviste indexate BDI.
13.1 Diseminarea rezultatelor
Rezultatele cercetărilor doctorale au fost prezentate in 7 lucrări publicate sau acceptate
spre publicare dintre care 2 lucrări la conferințe internaționale ISI Proceedings 3 in reviste
indexate IEEE Xplore si 2 în reviste indexate BDI.
ISI Proceedings
Babici C. Onea A. (2012) A Control Strategy for Reducing Fuel Consumption in a Hybrid
Electric Vehicle, lucrare publicată în volumul 2 la conferinței internaționale ICINCO 2012 -
9th International Conference on Informatics in Control, Automation and Robotics, July 28-
31, Rome, Italy, pp 543-547.
Babici C. Onea A. (2012) A Dynamic Programming Control Strategy for HEV, lucrare
acceptată spre publicare în cadrul The 2012 International Conference on Information
Technology and Management Innovation (ICITMI 2012),November 10-11, 2012,
Guangzhou, China.
Lucrări indexate IEEE
Babici, C., Onea, A., A Rule-Based Energy Management Strategy for Parallel Hybrid
Vehicles with Supercapacitors Proceedings of 15th
International Conference on System
Theory, Control, and Computing (ICSTCC), October 14 -16, 2011, Sinaia, Romania, pp. 63-
68, ISBN 978-973-621-323-6.
Babici, C., Onea, A., Hybrid Electric Vehicles Control Strategies – A Comparative study,
Proc. 14th International Conference on System Theory and Control, October 17 – 19, 2010,
Sinaia, Romania, (Ed. E. Petre), Ed. Universitaria Craiova, ISSN 2068 – 0465, pp. 49-55.
47
Babici C., Onea A.,: A Distributed Control Strategy for a Hybrid Electric Vehicle, lucrare
acceptată spre publicare în Proc of 16th International Conference on System Theory, Control,
and Computing (ICSTCC) October 12-14, 2012, Sinaia, Romania.
Lucrări indexate în reviste BDI:
Babici, C., Onea, A., A Brief Study of Reducing Fuel Consumption in Hybrid Electric
Vehicles, Annals of the University of Craiova, Vol. 7(34), No. 1, pp. 7-14, 2010, ISSN 1841-
0626.
Babici, C., Onea, A., Fuel Economy and Emissions in Hybrid Electric Vehicles, Buletinul
Institutului Politehnic din Iaşi, Tomul LVI(LX), Fasc. 2, pp. 75-91, 2010, ISSN 1220-2169.
Bibliografie
[1] Horga, V, Note de curs Vehicule electrice hibride.
[2] Livinţ, G.Vehiclue electrice hibride, Casa de Editura Venus 2006.
[3] Chan, C. C, The State of the Art of Electric and hybrid Vehicles, Proceedings of the IEEE
vol.90, No.2, February 2002.
[4] Gao Y., Ehsany M.; Hybrid electric Vehicle: Overview and State of the Art IEEE ISIE
2005, June 2005, Dubrovnik Croatia.
[5] Dăscălescu D., Dinamica autovehiculelor rutiere, Editura Politehnium Iasi,2006.
[6] Ghiulai C., Vasiliu Gh., Dinamica autovehiculelor, Editura Didactică şi Pedagogică,
București 1975.
[7] Gillespie Th., Fundamentals of Vehicle Dinamics. S.A.E. Incorporation, Warrendale, 1992.
[8] Husain I., Islam M., Design Modeling and Simulation of an Electric Vehicle Sistem, S.A.E.
Incorporation, 1999-01-1149.
[9] Husain I., Electric and Hybrid Vehicles. Design Fundamentals, CRC Press, Boca Raton,
Florida, 2003.
[10] Macarie T;, Automobile. Dinamică, Universitatea din Pitești, 2003.
[11] Tabacu S., Tabacu I., Macarie T., Neagu E., Dinamică Autovehiculelor. Îndrumar de
Proiectare, Editura Univesitatii din Pitești, 2004.
[12] Untar M., Stoicescu A., Potincu Gh., Peres Gh., Tabacu I., Dinamica autovehiculelor pe
roţi,. Editura Științifică şi Pedagogica, București, 1981.
[13] Urdareanu T., Vasiliu C., Gorianu M., Canta T., Propulsia şi circulatia autovehiculelor
cu roti,. Editura Stiintifica şi Enciclopedica, București, 1987.
[14] California Energy Commission. Analysis and Forecast of the Performance and Cost of
Convenţional and Electric-Hybrid Vehicles, Consultant Report, March2002.
[15] Serrao L., A Comparative Analysis of Energy Management Strategies For Hybrid
Electric Vehicles, Disertation, Ohio University 2009.
[16] Rahman Z., Butler K.L., Ehsani M., A Study of Design Issues on Electrically Peaking
Hybrid Electric Vehicle for Diverse Urban Driving Patterns, S.A.E. Incorporation,
1999-1-1151.
[17] Dumitru A., Stefan I., Comanda numerică a acţionarilor electrice de tip sensorless, Editura
ICPE, București, 2000.
[18] Dordea T., Mașini electrice, Editura Didactică şi Pedagogică, București, 1977.
[19] Fransua Al., Măgureanu R., Mașini şi acţionari electrice, Editura Tehnică, București, 1986.
[20] Kelemen A., Imecs M, Sisteme de reglare cu orientare după câmp ale mașinilor de curent
alternativ, Editura Academiei Romane, București, 1989.
48
[21] Leonhard W., Control of Electrical Drives, Editura Springer Verlag, Berlin, 1985;
[22] Livinţ Gh., Teoria sistemelor automate, Editura Gama, Iaşi, 1996.
[23] Livinţ Gh., Modelarea şi identificarea sistemelor, Editura Gh. Asachi, Iasi, 2002.
[24] Naunin D., Modern Drive System for Electric Vehicles, Journal of Electrical Engineering,
vol 2/2002.
[25] Alasdair, C., Blaxill, H.,Lean Boost and External Exaust Gas Recilculation for High Load
Controlled Auto-Ignition, SAE International, 2005.
[26] Chin Y.K., Coats F.E., Engine Dynamics :Time Based Versus Crank-Angle Based, SAE
paper No. 860412, 1986.
[27] Oprean I., Automobilul modern, Editura Academiei Romane, București, 2003.
[28] Sorenson S.C., Hendricks E., Mean Value Modeling of Spark Ignition Engines, SAE
Techincal paper 900616, 1990.
[29] Gaiginschi R., Rakosi E., The Mixture Stratification Procedure by the Division of Direct
Injection, Proc. Of the 3-rd International Colloquium FUELS, Germany, 2001.
[30] Jhonson, V, et al Development and Validation of a Temperature-Dependent
Resistance/Capacitance Battery Model for Advisor, Electric Vehicles Symposium 18,
2001, Germany.
[31] Corrigan, D., Menjak, I., Dhar S,. Nickel-Metal Hybride Batteries for ZEV-Range Hybrid
Electric Vehicles, Univerity of California, PNGV Future Truck Technical report, June
2000.
[32] Lipman, T.E., The Cost of Manufacturing Electric Vehicle Batteries, Report CARB,
Institute of Transportation Studies, Davis, 1999.
[33] Stempel R., Ovshinsky, S.R., Gifford P., Annual Battery Conference on Applications
and Advances, IEEE Spectrum, 35, No 11, 29, 1998.
[34] Panasonic, Lithium- Ion Batteries, Technical Handbook, 2000, International English.
[35] Panasonic, Nickel Cadmium Batteries, Technical Handbook, 2000, International
English.
[36] Panasonic, Ni-MH Batteries, Technical Handbook, 2000, International English.
[37] SAE Special Publication, Strategies în Electric and Hybrid Vehicle Design, No. SP 1156,
1996.
[38] Clondescu Gh., Tomuta O.D., Acumulatoare electrice, întretinere şi reparare, Editura
Tehnică București, 1977.
[39] Bojoi R., Direct Flux Vector Control of Axial Flux IPM Motors for in-Wheel Traction
Solutions, IECON 2010, pp 4-6.
[40] Dag Noreus, Substitution of Rechargeable NiCd Batteries, a Background Document to
Evaluate the Possibles of Finding Alternatives to NiCd Batteries, Arrhenius
Laboratory, Stockholm University 2008.
[41] Ehsani M., Electrical System Architectures For Military Vehicles, Overwiew of Vehicle
Group Projects, Texas A&M Univesity, Advanced Vehicle System Research
Program, Departament of Electrical Engineering Texas A&M Univerity.
[42] Juichi Arai, Dr. Eng., Yasushi Muranaka, Dr. Eng.,Mitsuru Koseki, High-Power and High
Energy Lithium Secondary Batteries for Electric Vehicles, Hitachi Review Vol.53, 2004.
[43] Kopera John, Inside the Nickel Metal Hybride Battery, Cobasys, iunie, 2004.
[44] Rahman Z., Butler K.L., Ehsani M., Designing Parallel Hybrid Electric Vehicles Using
V-ELPH 2.01, Proceedings of the American Control Conference, San Siego,
California, June 1999, pp. 2693-2697.

49
[45] Hellman, K., Peraltă, M., Pietrowski, G., Evaluation of a Toyota Prius Hybrid System
(THS) EPA Tehnical Report, 1998.
[46] Hrovat, D., Tobler, W.E., Bond Graph Modeling and Computer Simulation of
Automotive Torque Converters, Journal of Franklin Institute, Volume 319 Issue 1-2,
1985.
[47] Jung, K., Lee, H., Kim, T., et. al. Dinamic Characteristics of CVT Electro Hydraulic
Control Valves Including Shift Dynamics, FISITA World Automotive Congress, June
12-15, Seoul, Korea.
[48] Kotwiski, A.J., Dynamic Models for Torque Converter Equipped Vehicles, SAE Papers,
Paper No 820393, 1982.
[49] Yang, W., et al., An Optimization Technique for the Design of a Continously Variable
Transmission Control System for Automobiles, Int. Journal of Vehicles Design, Vol.6,
No.1, Jan 1985.
[51] Yang, W., et al., On the Use of Engine Modulation for Deceleration Control of
Continously Variable Transmission Vehicles, SAE Technical Paper, Paper No.850490,
1985.
[52] Toyota Motor Corporation Communications Dept, Toyota Electric and Hybrid Vehicles,
December 1997, Tokyo, Japan.
[53] Denis Dorffel, Peace-of-Mind, Seires Hybrid Electric Vehicle Drivetrain, Teza de
Doctorat 2003.
[54] Zeraoulia M. Benbouzid M.E.H., Dialo, D. Electric Motor Drive Selection Issues for HEV
Propulsion Systems: a Comparaţive Study”, IEEE 2005
[55] Ayalew B., Streit D.A., Tracţion Modelling Modification în ADVISOR, Heavy Vehicle
System, Int. J. of Vehicle Design, Vol.10, 2003.
[56] Marino R, Tomei P, Induction Motor Control Design, Editura Springer, Springer
Verlang London, 2010
[57] Elmqvist H., Mattson S.E., Otter M., Modelica- A Language for Physical System
Modeling, Visualization and Interacţion, The 1999 IEEE Sympos. On Computer Aided
Control System Design, Hawaii, aug.22-27, 1997.
[58] Gheorghiu V., Schmitz H., Krohm H., Real-Time Models for Hardware-in-the-Loop
System, ASIM Symposium Simulations Technik, 1993, Berlin, Germany.
[59] Grega W., Harware-in-the-loop Simulation and its Aplication în Control Education, 29th
ASEE/IEEE Frontiers în Education Conference, November 10-13, 1999, San Juan,
Puerto Rico.
[60] Boldea I., Atanasiu G., Analiza unitara a masinilor electrice, Editura Academiei,
București, 1983.
[61] Bose B., Modern Power Electronics and AC Drives Pretince Hall PTR, 2002.
[62] Caron J., Hautier J.P., Modelisation et commande de la machine asynchrone, Editions
Techniq, Paris, 1995.
[63] Tod R., Disturbance Torque and Motion State Estimation With Low-Resolution Position
Interfaces Using Heterodyning Observers, IEEE Transaction on Industry Applications,
Vol 44, No. 1, January/February 2008
[64] Chiasson J., Tolbert L., A Librari of Simulink Blocks for Real-Time Control of HEV
Tracţion Drives, SAE Inc., 02FCC-30, 2002.
[65] Husain I., Electric and Hybrid Vehicles, Design Fundamentals, CRC Press, Boca Raton,
Florida, 2003.
50
[66] Gao Y., Ehsani M., Hybrid Electric Vehicle: Overview and State of the Art, IEEE, 0 7803
8738-4/2005.
[67] Carlos A. Hernandez-Aramburo, Tim C.: Fuel Consumption Minimization of a
Microgrid, Disturbance Torque and Motion State Estimation With Low-Resolution
Position Interfaces Using Heterodyning Observers, IEEE Transaction on Industry
Applications, Vol. 41, No. 3, May/June 2005.
[68] ADVISOR
[69] Babici, C., Onea, A., Fuel Economy and Emissions in Hybrid Electric Vehicles,
Buletinul Institutului Politehnic din Iaşi, Tomul LVI(LX), Fasc. 2, pp. 75-91, 2010,
ISSN 1220-2169 [70] Babici C., Onea A.:“Hybrid Electric Vehicles Control
Strategies-A Comparaţive Study”, Proc. of 14th International Conference on System
Theory and Control. 2010.
[70] Lianghong W. Multiobjective Optimization of HEV Fuel Economy and Emissions Using
the Self-Adaptive Differential Evolution Algorithm, IEEE Transactions on Vehicular
Technology, Vol. 60, No 6, July 2011.
[71] Babici C., Onea A:“A Brief Study of Reducing Fuel Consumption in Hybrid Electric
Vehicles” The Annals of the Univeristy of Craiova, Series Automation, Computers,
Electronics and Mechatronics, Vol. 7 (34), No. 1, 2010.
[72] Serao L.: A Comparative Analysis of Energy management Strategies for Hybrid Electric
Vehicles.
[73] Smith K., Corregedor A.: Design and implementation of an Autonomous Hybrid Vehicle
[74] Pisu P., Rizzoni G.: A Comparative Study Of Supervisory Control Strategies for Hybrid
Electric Vehicles.
[75] Banvait H., Anwar S.: A Rule-Based Energy Management Strategy for Plugin Hybrid
Electric Vehicle (PHEV), 2009 American Control Conference Hyatt Regency
Riverfront, St. Louis, MO, USA.
[76] Crolla D, Ren Q., ElDemerdash S.: Controller design for hybrid vehicles – state of the
art review. IEEE Vehicle Power and Propulsion Conference (VPPC), September 3-5,
2008, Harbin, China.
[77] Huang K, Jiang D.: Design of Testbed System for Parallel HEV Powertrain
[78] A. Halvai, H. Moghbelli: Design Methodology of Drive Train for a Series Parallel Hybrid
Electric Vehicle (SP-HEV) and its Power Flow Control Strategy.
[79] Rezaei A, Salmasi F: State of Charge Estimation for Batteries in HEV Using Locally
LinearModel Tree (LOLIMOT), Proceeding of International Conference on Electrical
Machines and Systems 2007, Oct. 8~11, Seoul, Korea.
[80] Babici C., Onea A : “ Fuel Economy and Emissions in Hybrid Electric Vehicles“, Proc of
15th International Conference on System Theory, Control, and Computing
(ICSTCC) (2011).
[81] Babici C. Onea Al. A Control Strategy for Reducing Fuel Consumption in a Hybrid
Electric Vehicle, lucrare publicată în volulumul conferinţei int. ICINCO 2012
[82] Babici C. Al.Onea: A Distributed Control Strategy for a Hybrid Electric Vehicle, lucrare
acceptată spre publicare 16th International Conference on System Theory, Control,
and Computing (ICSTCC), 2012.
[83] Babici C. Al.Onea A Dynamic Programming Control Strategy for HEV, lucrare
acceptată spre publicare The 2012 International Conference on Information
Technology and Management Innovation (ICITMI 2012).


















