
STADIUL ACTUAL AL SISTEMELOR DE CONTROL A SUSPENSIEI ... · auto, s-a prezentat pe două strategii...
71
Universitatea „Ștefan cel Mare” – Suceava Facultatea de Inginerie Mecanică, Mecatronică și Management Domeniul Inginerie Mecanică REFERAT 1 STADIUL ACTUAL AL SISTEMELOR DE CONTROL A SUSPENSIEI AUTOVEHICULELOR în cadrul tezei de doctorat: CONTROLUL SEMI-ACTIV AL SUSPENSIEI AUTOMOBILULUI FOLOSIND FLUIDE MAGNETO-REOLOGICE ~ proiect de cercetare ~ Drd. Ing. Andronic Florin Conducător științific: Prof. dr. ing. Ioan Mihai - Ianuarie 2012 -
Transcript of STADIUL ACTUAL AL SISTEMELOR DE CONTROL A SUSPENSIEI ... · auto, s-a prezentat pe două strategii...
Universitatea „Ștefan cel Mare” – Suceava
Facultatea de Inginerie Mecanică, Mecatronică și Management
Domeniul Inginerie Mecanică
REFERAT 1
STADIUL ACTUAL AL SISTEMELOR DE CONTROL A SUSPENSIEI AUTOVEHICULELOR
în cadrul tezei de doctorat:
CONTROLUL SEMI-ACTIV AL SUSPENSIEI AUTOMOBILULUI FOLOSIND FLUIDE MAGNETO-REOLOGICE
~ proiect de cercetare ~
Drd. Ing. Andronic Florin Conducător științific: Prof. dr. ing. Ioan Mihai
- Ianuarie 2012 -

2

3
4
CUPRINS Rezumat ...................................................................................................................................... 6 I. SUSPENSIA AUTOMOBILULUI. CLASIFICARE. STRATEGII DE CONTROL ................................... 7
1.1 Rolul suspensiei ................................................................................................................ 7
1.2 Clasificarea suspensiilor ................................................................................................... 9
1.2.1 Sisteme de suspensii pasive ...................................................................................... 9
1.2.2 Sisteme de suspensii adaptive .................................................................................. 9
1.2.3 Sisteme de suspensii semi-active (parțial active) ................................................... 10
1.2.4 Sisteme de suspensii active parțial încărcate ......................................................... 10
1.2.5 Sisteme de suspensii active ..................................................................................... 10
1.3 Componență ................................................................................................................... 11
1.3.1 Amortizorul ............................................................................................................. 11
1.3.2 Elementele elastice ale suspensiei .......................................................................... 13 II. CONSIDERENTE ASUPRA MODELULUI MATEMATIC AL SUPENSIEI AUTOVEHICULULUI, STRATEGIILOR DE CONTROL, MODELELOR REOLOGICE .......................................................... 16
2.1 Modelul matematic al suspensiei autovehiculului ......................................................... 16
2.2 Strategii de control al suspensiei semi-active ................................................................ 19
2.2.1 Strategia "The Threshold Value" ............................................................................. 19
2.2.2 Strategia "Skyhook" ................................................................................................. 20
2.3 Modele reologice ........................................................................................................... 22
2.3.1 Modelul reologic Newton........................................................................................ 22
2.3.2 Modelul reologic Bingham ...................................................................................... 22
2.3.3 Modelul reologic Bouc-Wen .................................................................................... 27
2.3.4 Modelul reologic Oh-Onoda .................................................................................... 28
2.3.5 Modelul reologic Choi ............................................................................................. 29 III. STADIUL ACTUAL AL SISTEMELOR DE CONTROL A SUSPENSIEI AUTOVEHICULELOR ........ 30
3.1 Introducere ..................................................................................................................... 30
3.2 Suspensia controlată electronic, Renault Safrane ......................................................... 31
3.3 Sistemul Bilstein Damtronic, Nissan GT-R ...................................................................... 35
3.4 Suspensia pneumatică(4CL) cu control continuu al amortizoarelor (CDC), Volkswagen Phaeton ................................................................................................................................ 38
3.5 Sistemul Magnetic Ride, Audi TT .................................................................................... 42
3.6 Sisteme de control a suspensiei ce utilizează bara stabilizatoare ................................. 46
3.6.1 Bara stabilizatoare decuplabilă pe drum neasfaltat ............................................... 46
3.6.2 Bara stabilizatoare cu acțiune în două trepte ......................................................... 47
3.6.3 Bara stabilizatoare semi-activă ............................................................................... 47
3.6.4 Bara stabilizatoare activă ........................................................................................ 48
5
IV. STADIUL ACTUAL AL CERCETĂRILOR PRIVIND SISTEMELE DE CONTROL A SUSPENSIEI AUTOVEHICULELOR FOLOSIND AMORTIZORUL MAGNETO-REOLOGIC ................................... 51
4.1 Introducere ..................................................................................................................... 51
4.2 Stadiul actual al cercetărilor privind sistemele de control a suspensiei autovehiculelor folosind materiale magneto-reologice ................................................................................. 52
V. CONCLUZII ȘI DIRECȚII DE CERCETARE .................................................................. 67
5.1 Concluzii ......................................................................................................................... 67
5.2 Direcții de cercetare ....................................................................................................... 69 Bibliografie ............................................................................................................................... 70
6
Rezumat
Confortul la rulare este definit ca fiind confortul general şi bunăstarea ocupanţilor
vehiculului, în timpul călătoriei cu vehiculul. Principalele surse de disconfort sunt oscilațiile
care ajung în habitaclul vehiculului şi produc zgomot, vibraţii sau ambele. Având în vedere că
aceste surse de oscilații (calea de rulare, sistemul de suspensie, sistemul de propulsie) sunt în
afara habitaclului, componente special concepute pot fi folosite pentru a împiedica
transmiterea şi pătrunderea perturbaţiilor în compartimentul pentru pasageri. Amortizorul are rolul de a atenua oscilaţiile verticale ale caroseriei autovehiculului şi de
a micşora astfel acceleraţiile la care este supus corpul conducătorului şi pasagerilor.
Caracteristică de amortizare exprimă dependenţa dintre forţa de rezistenţă şi viteza de
deplasare a pistonului. Amortizoarele clasice au o caracteristică de amortizare unică.
Utilizarea unui amortizor având caracteristică reglabilă permite, pe de o parte, obţinerea
unor coeficienţi de amortizare diferiţi pe cursa de comprimare şi pe cea de destindere, iar pe
de altă parte o adaptare mai bună la condiţiile terenului.
Amortizoarele la care caracteristica de amortizare se modifică prin schimbarea
vâscozităţii fluidului de lucru utilizează lichide magneto-reologice sau electro-reologice. Sub
acţiunea câmpului magnetic sau electric, lichidul trece de la starea lichidă la cea semisolidă
într-un interval de timp de ordinul milisecundelor. Fluidele electro-reologice prezintă o serie
de dezavantaje (necesită intensităţi mari ale câmpului electric, vâscozitatea se modifică în
limite restrânse şi este puternic influenţată de temperatură); din acest motiv, în construcţia
amortizoarelor semi-active se preferă utilizarea lichidelor magneto-reologice. Un fluid
magneto-reologic este un lichid obținut din dispersarea coloidală a unor particule metalice
solide fine într-un ulei sintetic pe baza de hidrocarburi. Vâscozitatea acestuia se modifică când
este expus la diferite câmpuri magnetice. Proprietatea acestui fluid poate fi utilizată pentru a
schimba caracteristicile amortizării, drept urmare amortizorul magneto-reologic este folosit în
diferite aplicații în scopul controlului activ al vibrațiilor.
Lucrarea de față constituie un punct de plecare în ceea ce privește cercetările teoretice și
experimentale. În capitolul unu am efectuat o prezentare sumară a sistemului de suspensie a
autovehiculelor, o clasificare a acestora precum și descrierea elementelor esențiale care
influențează în mod direct siguranța și confortul ocupațiilor.
Capitolul doi prezintă considerente asupra modelului matematic clasic al suspensiei
auto, s-a prezentat pe două strategii de control esențiale a sistemului de suspensie și stadiul
actual al modelelor reologice care sunt esențiale la proiectarea unor aplicații tehnice cu
elemente disipative utilizând lichide magneto-reologice.
Controlul sistemului de suspensie se face prin intermediul amortizoarelor cu
caracteristică variabilă, a arcurilor pneumatice și a barelor stabilizatoare controlabile. Stadiul
actual a sistemelor de control a suspensiei vehiculului întâlnite în practică este prezentat în
capitolul trei.
În capitolul patru este prezentat stadiul actual al cercetărilor privind sistemele de control
a suspensiei folosind amortizorul magneto-reologic. Diferite tipuri de control sunt folosite ca:
LPV - variația parametrilor liniari, FLC - controlul logic fuzzy, SMC - controlul modului de
alunecare, etc.
Capitolul cinci încheie această lucrare cu o serie de concluzii privind materialele
studiate, stabilindu-se și direcțiile de cercetare pentru etapa viitoare.
7
I. SUSPENSIA AUTOMOBILULUI. CLASIFICARE. STRATEGII DE CONTROL
1.1 Rolul suspensiei
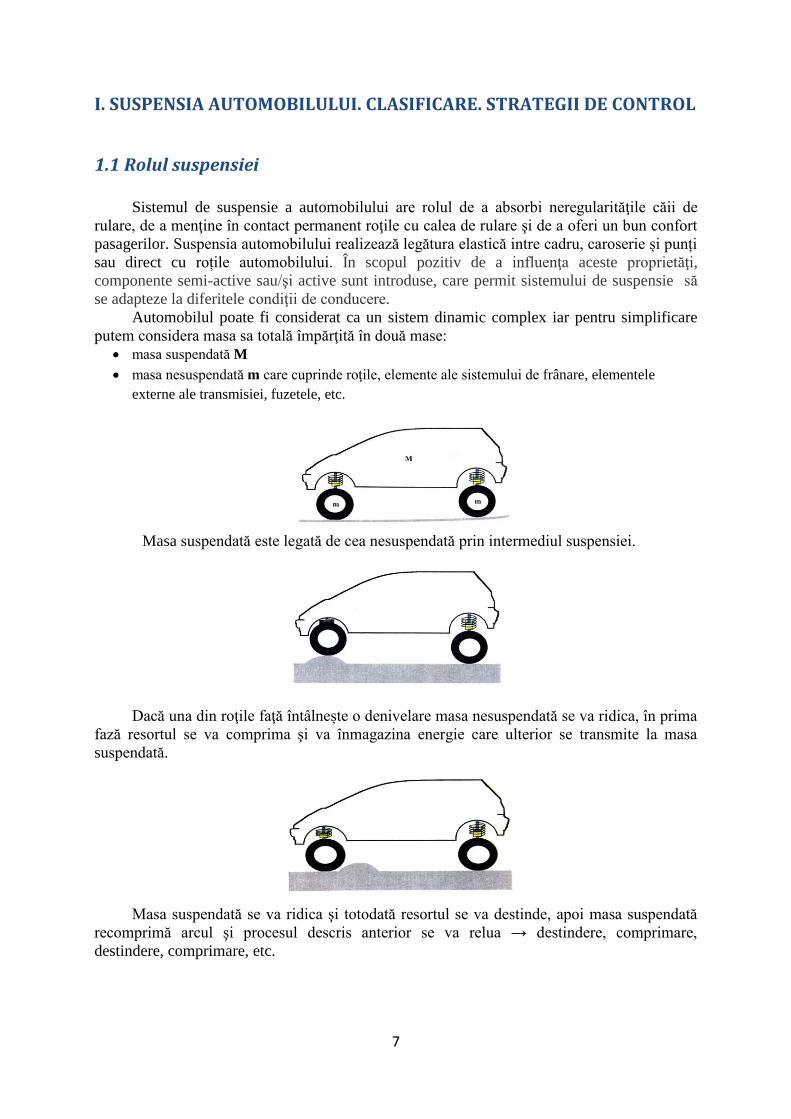
Sistemul de suspensie a automobilului are rolul de a absorbi neregularităţile căii de
rulare, de a menţine în contact permanent roţile cu calea de rulare şi de a oferi un bun confort
pasagerilor. Suspensia automobilului realizează legătura elastică intre cadru, caroserie și punți
sau direct cu roțile automobilului. În scopul pozitiv de a influenţa aceste proprietăţi,
componente semi-active sau/şi active sunt introduse, care permit sistemului de suspensie să
se adapteze la diferitele condiţii de conducere.
Automobilul poate fi considerat ca un sistem dinamic complex iar pentru simplificare
putem considera masa sa totală împărţită în două mase:
masa suspendată M
masa nesuspendată m care cuprinde roţile, elemente ale sistemului de frânare, elementele
externe ale transmisiei, fuzetele, etc.
Masa suspendată este legată de cea nesuspendată prin intermediul suspensiei.
Dacă una din roţile faţă întâlnește o denivelare masa nesuspendată se va ridica, în prima
fază resortul se va comprima şi va înmagazina energie care ulterior se transmite la masa
suspendată.
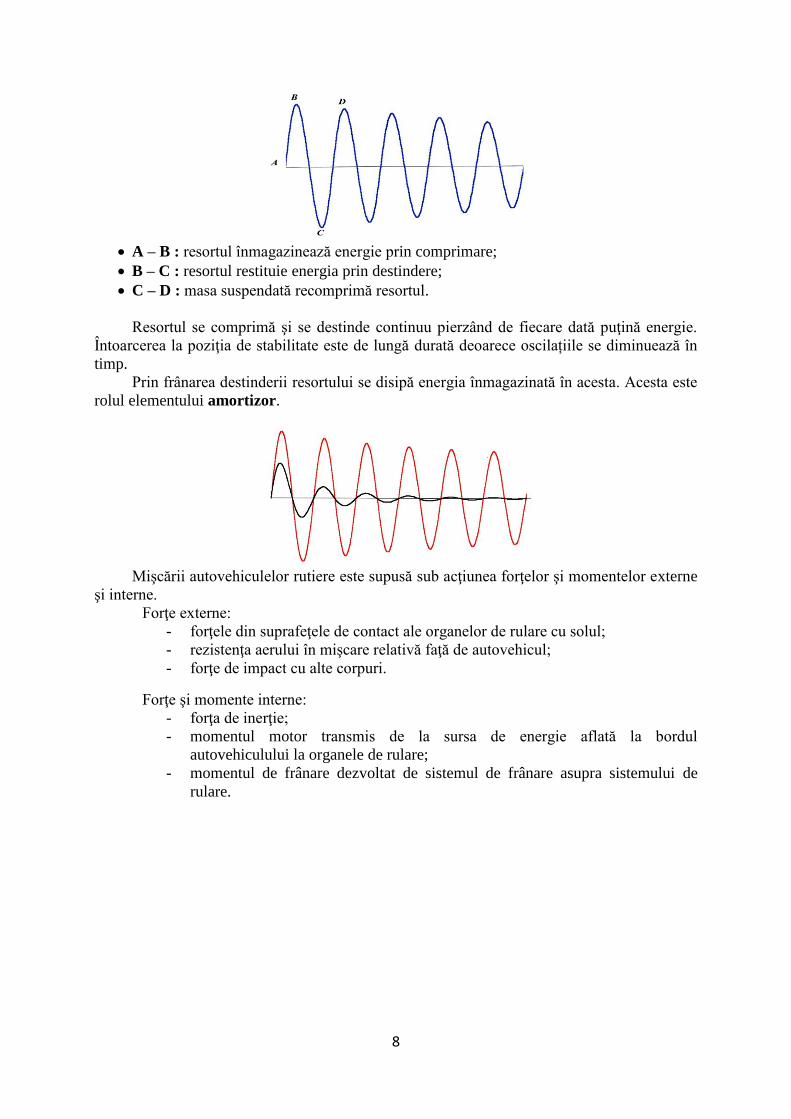
Masa suspendată se va ridica şi totodată resortul se va destinde, apoi masa suspendată
recomprimă arcul şi procesul descris anterior se va relua → destindere, comprimare,
destindere, comprimare, etc.
8
A – B : resortul înmagazinează energie prin comprimare;
B – C : resortul restituie energia prin destindere;
C – D : masa suspendată recomprimă resortul.
Resortul se comprimă şi se destinde continuu pierzând de fiecare dată puţină energie.
Întoarcerea la poziţia de stabilitate este de lungă durată deoarece oscilațiile se diminuează în
timp.
Prin frânarea destinderii resortului se disipă energia înmagazinată în acesta. Acesta este
rolul elementului amortizor.
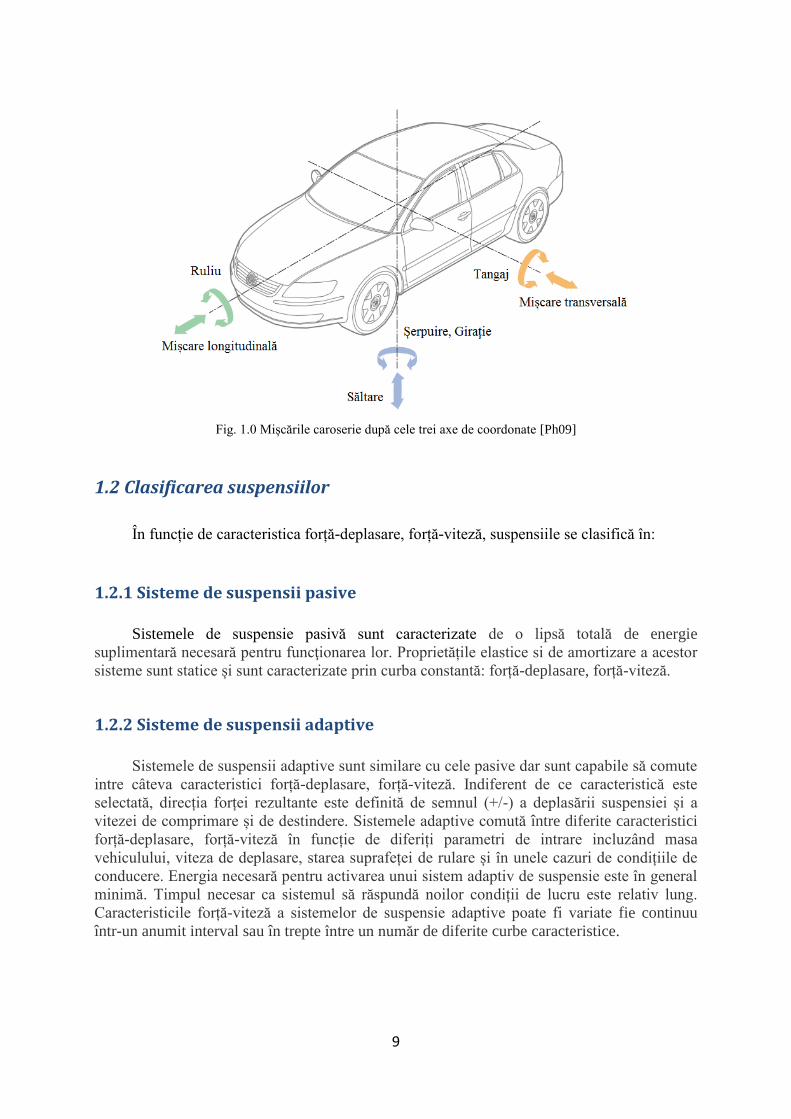
Mişcării autovehiculelor rutiere este supusă sub acţiunea forţelor şi momentelor externe
şi interne.
Forţe externe:
- forţele din suprafeţele de contact ale organelor de rulare cu solul;
- rezistenţa aerului în mişcare relativă faţă de autovehicul;
- forţe de impact cu alte corpuri.
Forţe şi momente interne:
- forţa de inerţie;
- momentul motor transmis de la sursa de energie aflată la bordul
autovehiculului la organele de rulare;
- momentul de frânare dezvoltat de sistemul de frânare asupra sistemului de
rulare.
9
Fig. 1.0 Mișcările caroserie după cele trei axe de coordonate [Ph09]
1.2 Clasificarea suspensiilor
În funcție de caracteristica forță-deplasare, forță-viteză, suspensiile se clasifică în:
1.2.1 Sisteme de suspensii pasive
Sistemele de suspensie pasivă sunt caracterizate de o lipsă totală de energie
suplimentară necesară pentru funcţionarea lor. Proprietățile elastice si de amortizare a acestor
sisteme sunt statice și sunt caracterizate prin curba constantă: forță-deplasare, forță-viteză.
1.2.2 Sisteme de suspensii adaptive
Sistemele de suspensii adaptive sunt similare cu cele pasive dar sunt capabile să comute
intre câteva caracteristici forță-deplasare, forță-viteză. Indiferent de ce caracteristică este
selectată, direcția forței rezultante este definită de semnul (+/-) a deplasării suspensiei și a
vitezei de comprimare și de destindere. Sistemele adaptive comută între diferite caracteristici
forță-deplasare, forță-viteză în funcție de diferiți parametri de intrare incluzând masa
vehiculului, viteza de deplasare, starea suprafeței de rulare și în unele cazuri de condițiile de
conducere. Energia necesară pentru activarea unui sistem adaptiv de suspensie este în general
minimă. Timpul necesar ca sistemul să răspundă noilor condiții de lucru este relativ lung.
Caracteristicile forță-viteză a sistemelor de suspensie adaptive poate fi variate fie continuu
într-un anumit interval sau în trepte între un număr de diferite curbe caracteristice.
10
1.2.3 Sisteme de suspensii semi-active (parţial active)
Frecvențele de comutare a sistemelor semi-active sunt mai mari decât cele ale
oscilaţiilor caracteristice ale roţilor vehiculului şi corpul său. Sistemele semi-active pot trece
destul de repede de la o curbă caracteristică la alta precum și in orice punct dintre cele două
caracteristici și sunt dinamic realizabile.
1.2.4 Sisteme de suspensii active parţial încărcate
Astfel de sisteme de suspensii pun în prim-plan o componentă activă, ajustabilă care
suplimentează elementele standard de arc și amortizor. Elementele active utilizate în aceste
sisteme sunt de regulă pneumatice sau hidraulice. Timpul mai mare de răspuns a acestor
sisteme presupune că acestea sunt folosite în paralel cu un sistem pasiv arc/amortizor pentru a
compensa micile frecvențele a mișcărilor de ruliu, înclinare si deplasare pe verticală.
1.2.5 Sisteme de suspensii active
Sistemele de suspensii active sunt sigurele sisteme din această clasificare la care se pot
aplica forțe între caroserie automobilului și roțile acestuia, forțe care sunt complet
independente direcția curentă a deplasării suspensiei. Aplicare acestor forțe presupune sursă
de putere externă sistemului.
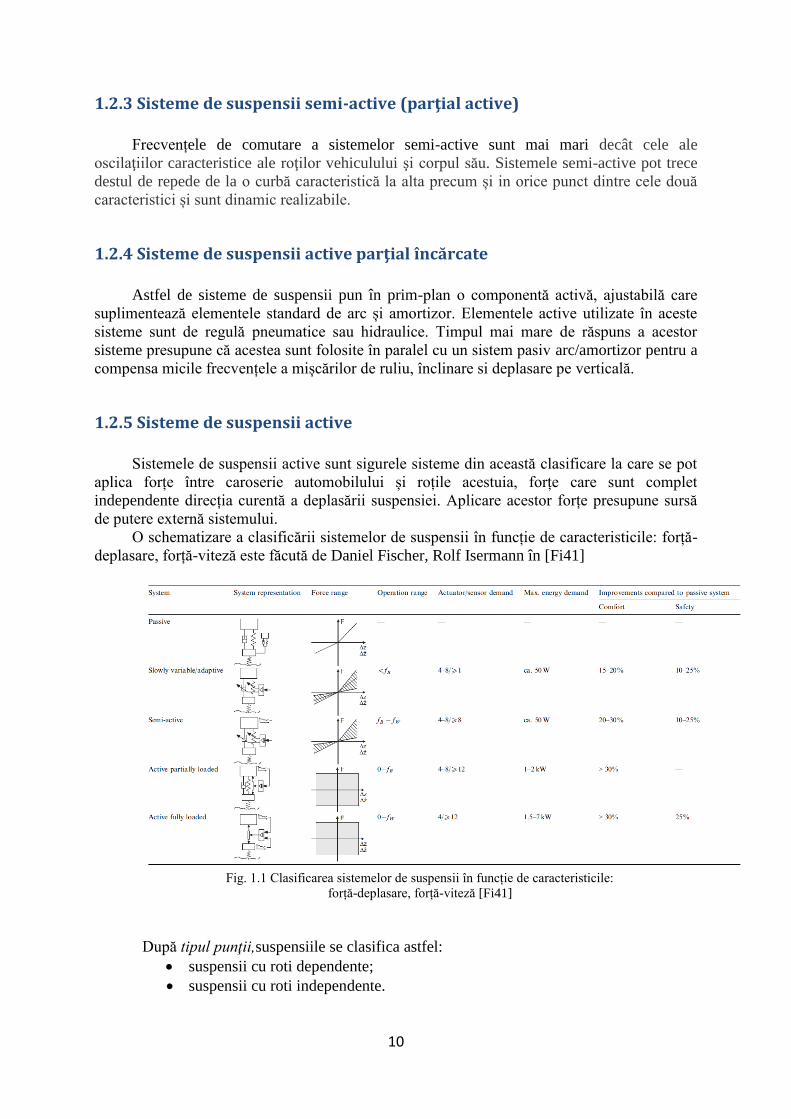
O schematizare a clasificării sistemelor de suspensii în funcție de caracteristicile: forță-
deplasare, forță-viteză este făcută de Daniel Fischer, Rolf Isermann în [Fi41]
Fig. 1.1 Clasificarea sistemelor de suspensii în funcție de caracteristicile:
forță-deplasare, forță-viteză [Fi41]
După tipul punţii,suspensiile se clasifica astfel:
suspensii cu roti dependente;
suspensii cu roti independente.
11
În funcţie de tipul caracteristicii elastice, suspensiile se clasifică în:
suspensii cu caracteristica elastică lineară;
suspensii cu caracteristica elastică nelineară.
1.3 Componenţă
Suspensia unui automobil cuprinde elemente elastice, dispozitive de ghidare,
amortizoare şi stabilizatoare. Elementele elastice servesc pentru micşorarea sarcinii dinamice
rezultate la trecerea roţilor pentru neregularităţile drumului.
În acelaşi timp, elementele elastice fac ca oscilaţiile caroseriei să fie suportabile de
pasageri şi să nu dăuneze mărfurilor care se transportă.
Elementele de ghidare transmit componentele longitudinale şi transversale ale forţelor
de interacţiune cu drumul, precum şi momentele acestor forte, determinând cinematica roţilor
fată de cadru sau caroserie.
Elementele de amortizare împreună cu frecarea dintre foile arcurilor amortizează
oscilaţiile caroseriei şi ale roţilor, eliminând apariţia fenomenului de rezonantă.
Funcţiile celor trei elemente principale ale suspensiei pot fi îndeplinite de unul şi acelaşi
element sau de elemente diferite.
În unele cazuri, suspensia automobilului mai conţine elemente suplimentare -
stabilizatoare, care au rol de a reduce înclinările laterale ale autovehiculelor în viraje.
Suspensia automobilului trebuie să îndeplinească următoarele condiţii principale:
caracteristică elastică corespunzătoare care să asigure un grad de confort
satisfăcător;
construcţie simplă şi rezistentă;
amortizarea vibraţiilor caroseriei şi roţilor;
asigurarea cinematicii corecte a mecanismului de direcţie;
greutatea minimă;
să transmită forţele de la caroserie la roţi şi de la roţi la caroserie, precum şi
momentele reactive care apar.
Suspensia conţine în principal un element suplu (resort tip lamă, elicoidal, bară de
torsiune, cauciuc, gaz, aer) şi un element de amortizare (amortizorul).
1.3.1 Amortizorul
Pentru amortizarea rapidă a oscilaţiilor, în suspensia automobilelor moderne se
montează amortizoare hidraulice. Amortizoarele pot fi folosite la ambele punţi ale
automobilului sau numai la puntea din faţă, soluţie întâlnită mai ales la autocamioane.
Principiul de funcţionare a amortizorului hidraulic se bazează pe transformarea energiei
mecanice a oscilaţiei în energie termică. Majoritatea amortizoarelor sunt cu dublă acţiune,
lucrând în ambele sensuri: la apropierea roţilor de caroserie opun rezistenţă mică; la
depărtarea roţii de caroserie opun rezistenţă mai mare.
Amortizoarele cele mai răspândite la automobile sunt cele sub formă telescopică,
clasificate în mono-tubulare şi bi-tubulare, şi care, la rândul lor, pot fi de mai mult; tipuri.
Cele mai folosite sunt amortizoarele bi-tubulare, care în comparaţie cu cele mono-tubulare, au
o lungime mai redusă şi o durată de funcţionare mai mare.
Amortizorul are rolul de a contribui la creșterea gradului de confort şi de securitate a
vehiculului prin atenuarea mişcării maselor suspendate şi nesuspendate.
12
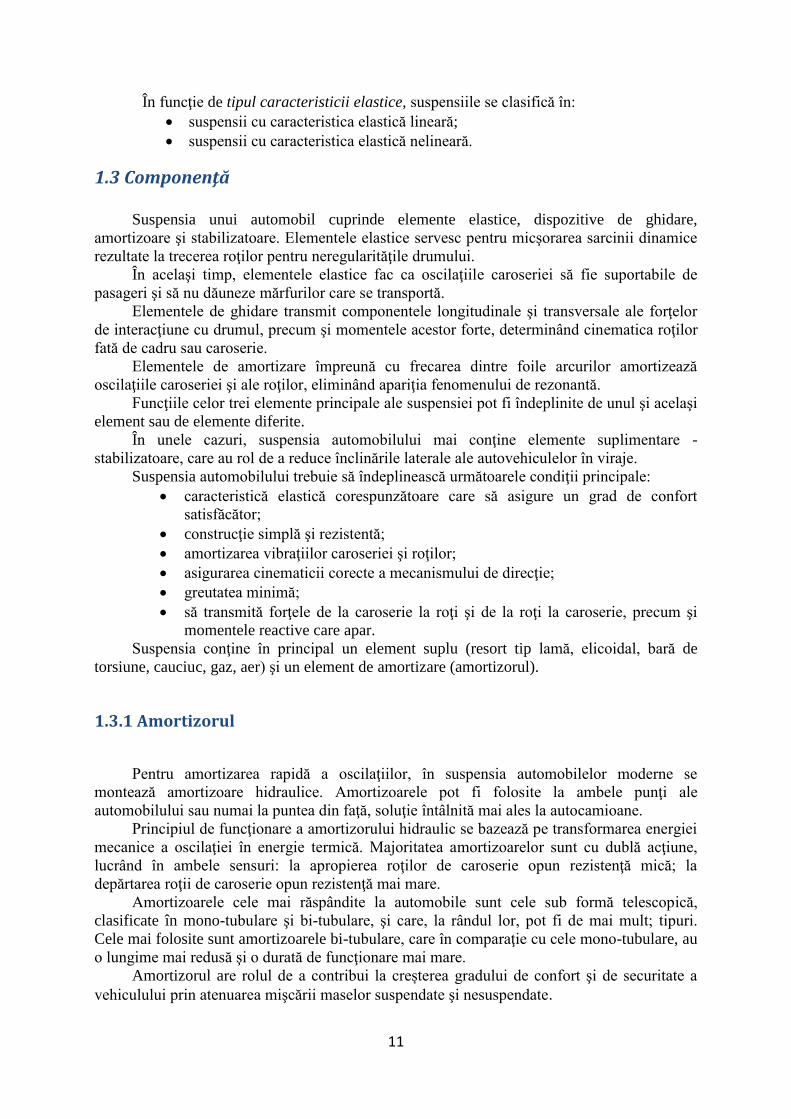
Efectul de amortizare este direct proporţional cu viteza de deplasare a pistonului din
interiorul amortizorului. În cazul deplasărilor lente ale maselor vehiculului amortizorul
lucrează puţin iar rezistenţa sa este scăzută. Dacă mişcarea este rapidă amortizorul opune o
puternică rezistenţă.
Sub efectul unei solicitări rapide pistonul comprimă brutal uleiul care se opune
deplasării sale şi care va fi obligat să treacă printr-un orificiu calibrat. Viteza de trecere este
funcţie de tarajul orificiului şi de diferenţa de presiune dintre cele două camere ale
amortizorului.
Fig. 1.2 Elementele componente ale amortizorului, principiul de funcționare [Re02]
1 – corp cilindric; 2 – piston; 3 – supape (destindere, comprimare); 4 – tijă; 5 – garnitură; 6 –
piston flotant; 7 – cameră de volum variabil; 8 – protector; 9- valve; 10 – resort; 11 - ulei.
Fig. 1.3 Secțiune longitudinală amortizor bi-tubular și monotubular [Be11]
Rezistenţa opusă de amortizor pe cursa de comprimare este inferioară celei
corespunzătoare cursei de destindere (avem taraje diferite la cele două supape uni-sens).
13
1.3.2 Elementele elastice ale suspensiei
Scopul elementelor elastice ale suspensiei este de a filtra neregularităţile căii de rulare
prin acumulare de energie care va fi restituită ulterior.
Elementele elastice ale suspensiei întâlnite la automobile sunt:
arcurile în foi,
arcurile elicoidale,
barele de torsiune,
elementele elastice pneumatice şi hidropneumatice.
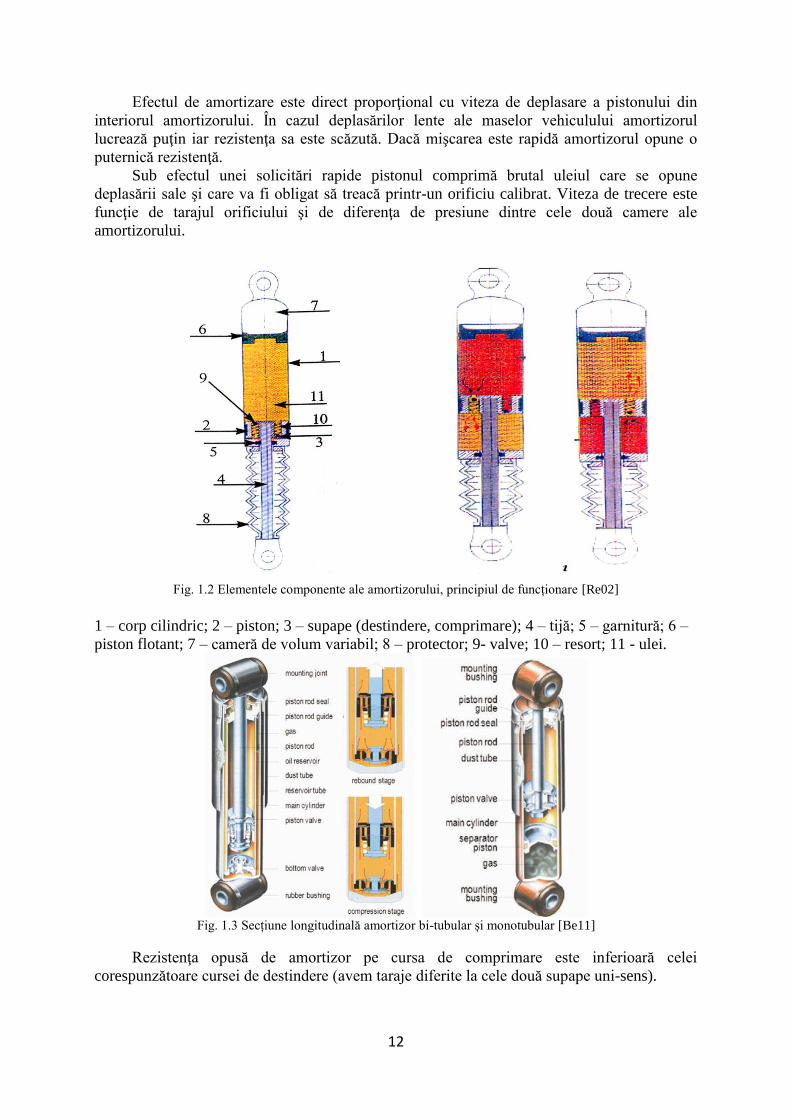
Elementele componente ale unui arc în foi sunt reprezentate în fig. 1.4. Foaia principală
a arcului are capetele îndoite în formă de ochiuri în care se introduc bucşe din bronz sau inele
din cauciuc, prin intermediul cărora se fixează de partea suspendată a automobilului. Celelalte
foi se numesc foi secundare şi sunt strânse cu bulonul central de foaia principală.
Fig. 1.4 Arcul in foi [Gf05]
Bridele nu dau posibilitatea foilor de arc să se deplaseze lateral una faţă de alta. Se
întâlnesc şi arcuri cu două foi principale, la care ochiul primei foi principale este dublat de a
doua foaie principală.
Pentru a micşora tensiunile ce apar în foaia principală, foile arcului sunt executate cu
raze de curbură diferite, din ce în ce mai mici (springuite), iar la strângerea lor, cu bulonul
central, apare o pretensionare a foii principale, care îşi va micşora raza de curbură.
Frecarea care ia naştere între foile arcului contribuie la amortizarea oscilaţiilor
automobilului. Frecarea între foi fiind mare, arcul este prea rigid şi pentru a i se mări
elasticitatea la montare, foile sunt unse cu unsoare consistentă grafitată. Prinderea arcului de
cadru se poate face în mai multe feluri. Arcurile pot fi dispuse longitudinal sau transversal pe
cadru.
Un avantaj al suspensiei cu arcuri în foi îl constituie faptul că, pe lângă forţele verticale,
poate prelua şi forţele orizontale.
Arcurile elicoidale se execută din bare de oţel înfăşurate după o elice. La acest tip de
arcuri, nu apare frecarea, ca urmare, suspensia cu astfel de arcuri necesită folosirea unor
amortizoare mai puternice. De asemenea, aceste arcuri preiau numai sarcini ce lucrează în
lungul axei lor şi din această cauză la o suspensie cu astfel de arcuri se prevăd dispozitive de
ghidare.
14
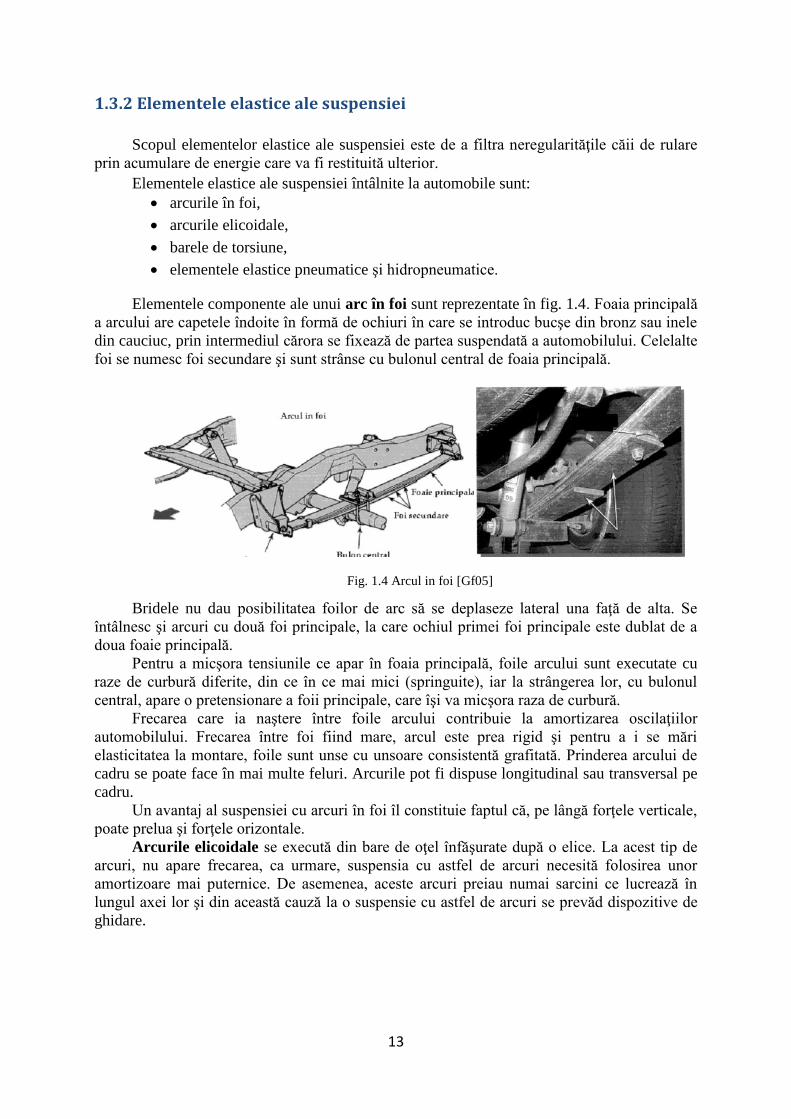
Fig. 1.5 Arc elicoidal, a) cu rigiditate fixă, b) cu rigiditate variabilă [Re02]
Sub efectul sarcinii spirele se apropie una de alta conservând intervale identice între
acestea ( rigiditate fixă ). La resortul cu rigiditate variabilă se asigură progresivitatea durităţii
suspensiei odată cu creşterea încărcării.
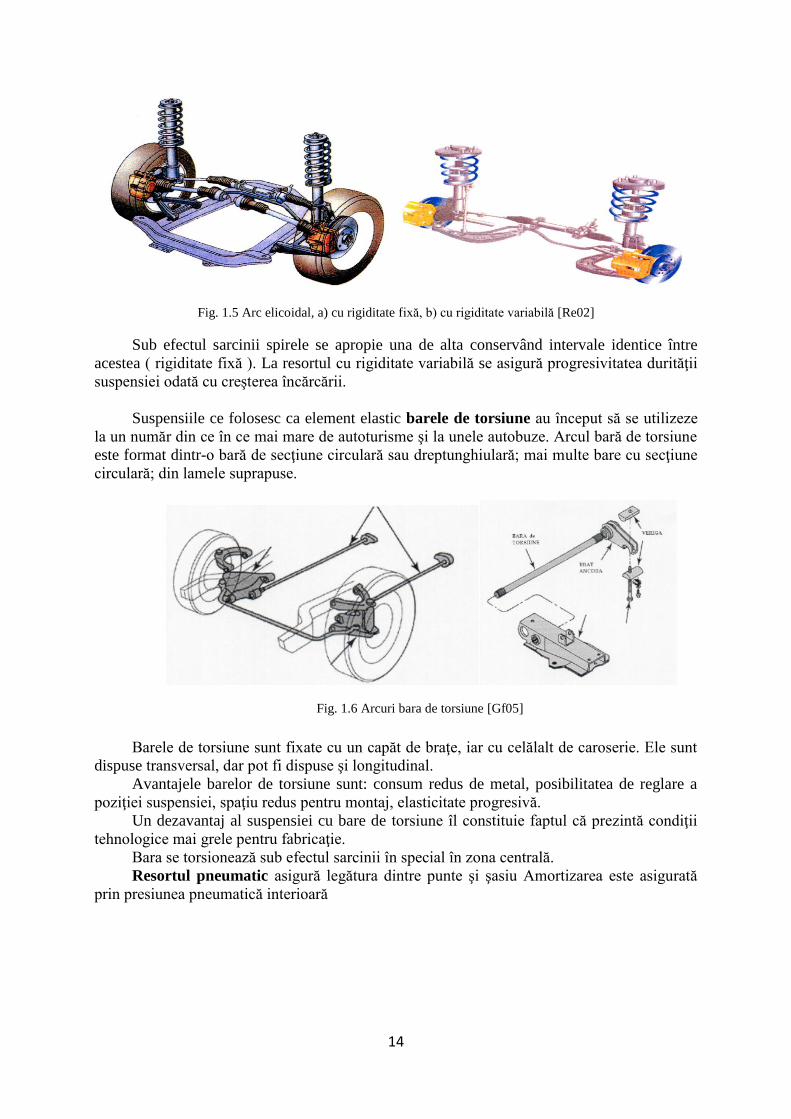
Suspensiile ce folosesc ca element elastic barele de torsiune au început să se utilizeze
la un număr din ce în ce mai mare de autoturisme şi la unele autobuze. Arcul bară de torsiune
este format dintr-o bară de secţiune circulară sau dreptunghiulară; mai multe bare cu secţiune
circulară; din lamele suprapuse.
Fig. 1.6 Arcuri bara de torsiune [Gf05]
Barele de torsiune sunt fixate cu un capăt de braţe, iar cu celălalt de caroserie. Ele sunt
dispuse transversal, dar pot fi dispuse şi longitudinal.
Avantajele barelor de torsiune sunt: consum redus de metal, posibilitatea de reglare a
poziţiei suspensiei, spaţiu redus pentru montaj, elasticitate progresivă.
Un dezavantaj al suspensiei cu bare de torsiune îl constituie faptul că prezintă condiţii
tehnologice mai grele pentru fabricaţie.
Bara se torsionează sub efectul sarcinii în special în zona centrală.
Resortul pneumatic asigură legătura dintre punte şi şasiu Amortizarea este asigurată
prin presiunea pneumatică interioară
15
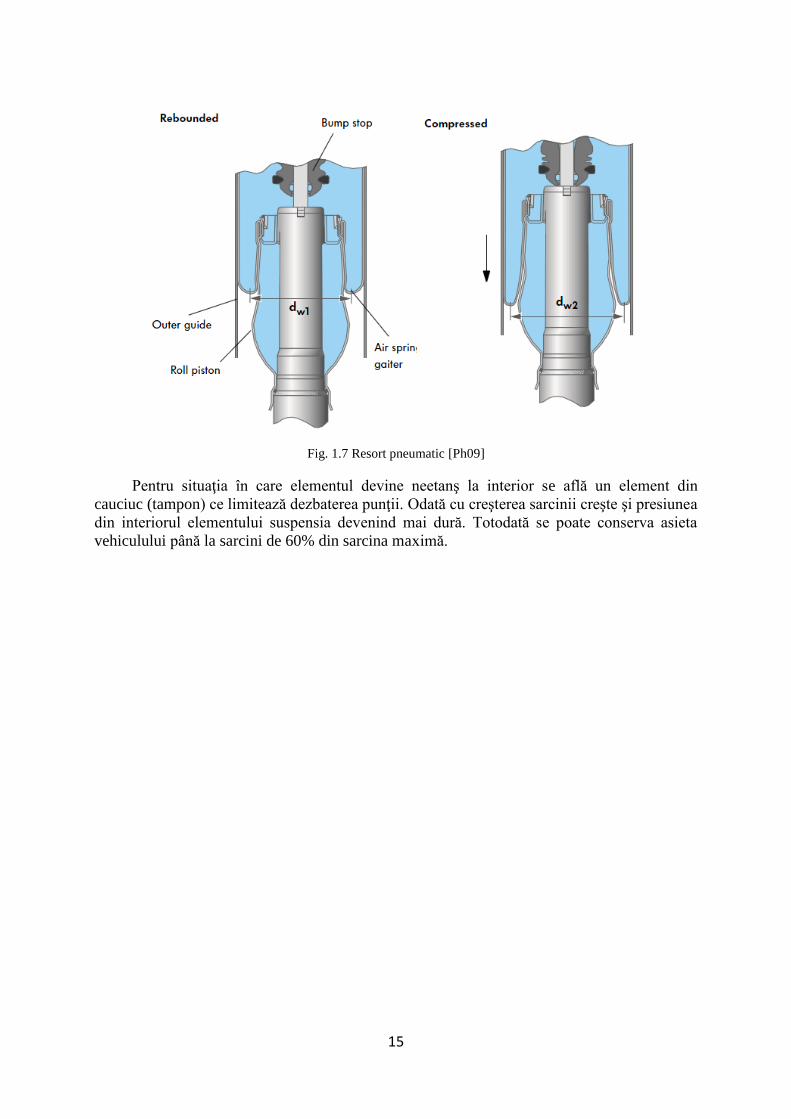
Fig. 1.7 Resort pneumatic [Ph09]
Pentru situaţia în care elementul devine neetanş la interior se află un element din
cauciuc (tampon) ce limitează dezbaterea punţii. Odată cu creşterea sarcinii creşte şi presiunea
din interiorul elementului suspensia devenind mai dură. Totodată se poate conserva asieta
vehiculului până la sarcini de 60% din sarcina maximă.
16
II. CONSIDERENTE ASUPRA MODELUL MATEMATIC AL SUPENSIEI AUTOVEHICULULUI, STRATEGIILOR DE CONTROL, MODELELOR REOLOGICE
2.1 Modelul matematic al suspensiei autovehiculului
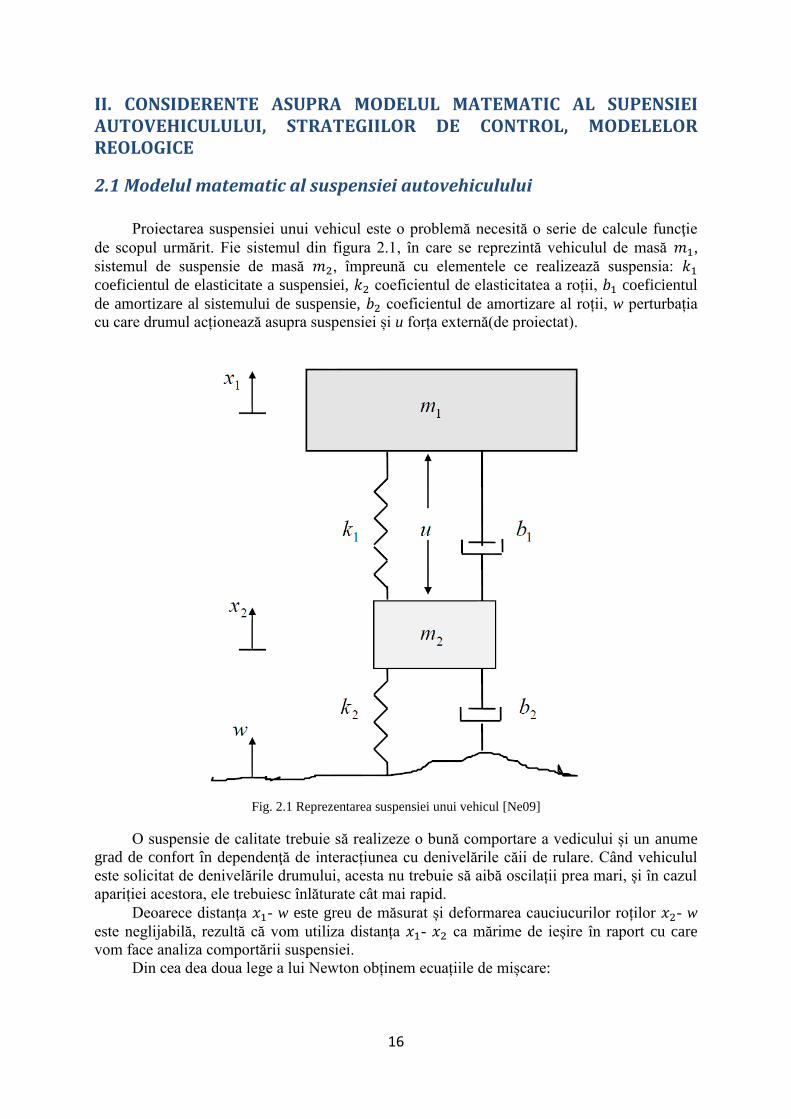
Proiectarea suspensiei unui vehicul este o problemă necesită o serie de calcule funcţie
de scopul urmărit. Fie sistemul din figura 2.1, în care se reprezintă vehiculul de masă ,
sistemul de suspensie de masă , împreună cu elementele ce realizează suspensia:
coeficientul de elasticitate a suspensiei, coeficientul de elasticitatea a roții, coeficientul
de amortizare al sistemului de suspensie, coeficientul de amortizare al roții, w perturbația
cu care drumul acționează asupra suspensiei și u forța externă(de proiectat).
Fig. 2.1 Reprezentarea suspensiei unui vehicul [Ne09]
O suspensie de calitate trebuie să realizeze o bună comportare a vedicului și un anume
grad de confort în dependenţă de interacțiunea cu denivelările căii de rulare. Când vehiculul
este solicitat de denivelările drumului, acesta nu trebuie să aibă oscilații prea mari, și în cazul
apariției acestora, ele trebuiesc înlăturate cât mai rapid.
Deoarece distanța - w este greu de măsurat și deformarea cauciucurilor roților - w
este neglijabilă, rezultă că vom utiliza distanța - ca mărime de ieșire în raport cu care
vom face analiza comportării suspensiei.
Din cea dea doua lege a lui Newton obținem ecuațiile de mișcare:

17
(2.1)
(2.2)
Pentru a obține o reprezentare în spațiul stărilor trebuie să selectăm variabilele de stare.
Pe moment nu cunoaștem care este cea mai bună alegere ale acestor variabile. De aceea, vom
începe prin a scrie:
(2.3)
(2.4)
Alegem prima variabilă de stare ca fiind poziția . Deoarece derivata intrării nu apare
în ecuația lui vom alege o a doua variabilă de stare ca . A treia variabilă de stare o
alegem ca fiind . Cu acestea, putem scrie:
(2.5)
(2.6)
Scăzând relația (2.6) din relația (2.5), obținem:
(2.7)
Integrând obținem:
(2.8)
Observăm că în această ecuație nu apare derivata intrării. Mai mult, deoarece , rezultă că este exprimat numai în funcție de stările selectate până acum și de intrare. Ca
atare, integrala din relația de mai sus o notăm cu . Deci:

18
(2.9)
Cu acestea, putem scrie:
(2.10)
Substituind această relație în ecuația (2.3) obținem:
(2.11)
Cu acestea, considerând variabilele de stare: , , și modelul matematic al
sistemului de suspensie al unui vehicul, în reprezentarea prin variabile de stare este
următorul:
1 2 1 1 1 2 1 1
1 11 2 1 1 2 2 1 1
1 1
2 1 1 21 1
2 1 2 22 2
2 1 1 2
2 2 2 2
1
1 2
0 1 0 0
0
0 1
0 0
0
1
0
1 1
b b b b b b k bx x
m m m m m m m mx x
b b b bz z
m m m mz z
k k k k
m m m m
m
m m
1 2
1 2
2
2
2
2
0
b b
m mu
bw
m
k
m
(2.12)
(2.13)
19
2.2 Strategii de control al suspensiei semi-active
Sistemele dinamice de control vertical oferă trei avantaje principale:
1. confortul la rulare poate fi mărit prin modificarea suspensiei pentru a se potrivi
abaterilor de la suprafaţa drumului, de exemplu, prin modificarea amortizării pe
drumuri accidentate folosind în construcția amortizoarelor valve variabile.
2. manevrabilitatea și siguranța pot fi îmbunătățite prin menținerea pneului tot
timpul in contact cu calea de rulare.
3. manevrabilitatea automobilului poate fi mai puțin dependentă de condițiile de
încărcare a vehiculului, prin intermediul unui sistem de reglare a asietei.
La un sistem de suspensie pasivă este necesar întotdeauna un compromis între confort și
siguranță. Amortizoarele controlate electronic elimină acest dezavantaj prin ajustarea continuă
a ratei de amortizare în conformitate cu condițiile de conducere la momentul respectiv.
Într-un sistem de suspensie semi-activă forțele. amortizorului pot fi controlate folosind
diferite strategii. Două dintre aceste strategii de control sunt prezentate în cele ce urmează:
2.2.1 Strategia "The Threshold Value"
Strategia "The Threshold Value" controlează ratele amortizării în funcție de semnalele
primite de la unul sau doi senzori care detectează condițiile de conducere și starea căii de
rulare. Obiectivul principal al acestei strategii de control este de a îmbunătății confortul
pasagerilor.
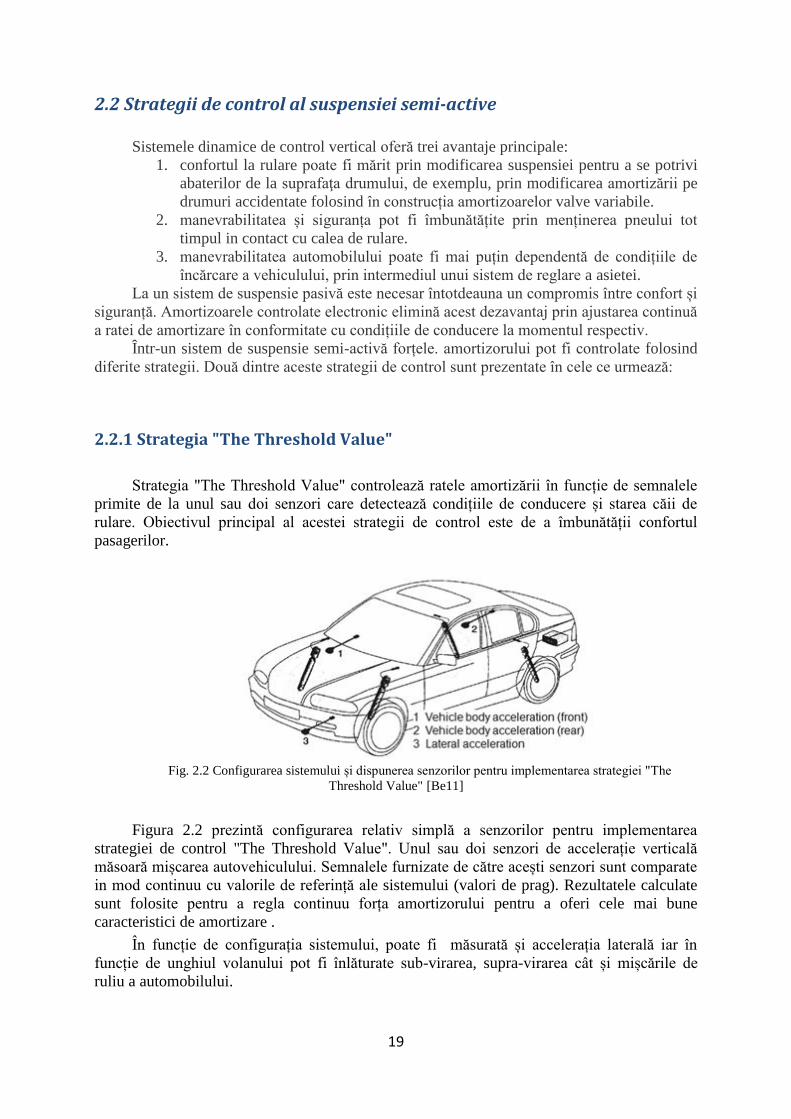
Fig. 2.2 Configurarea sistemului și dispunerea senzorilor pentru implementarea strategiei "The
Threshold Value" [Be11]
Figura 2.2 prezintă configurarea relativ simplă a senzorilor pentru implementarea
strategiei de control "The Threshold Value". Unul sau doi senzori de accelerație verticală
măsoară mișcarea autovehiculului. Semnalele furnizate de către acești senzori sunt comparate
in mod continuu cu valorile de referință ale sistemului (valori de prag). Rezultatele calculate
sunt folosite pentru a regla continuu forța amortizorului pentru a oferi cele mai bune
caracteristici de amortizare .
În funcție de configurația sistemului, poate fi măsurată și accelerația laterală iar în
funcție de unghiul volanului pot fi înlăturate sub-virarea, supra-virarea cât și mișcările de
ruliu a automobilului.
20
2.2.2 Strategia "Skyhook"
Strategia "Skyhook" este bazată pe teoria conform căreia confortul în rulare este optim
când oscilațiile caroseriei vehiculului sunt amortizate în raport cu orizontala sau o linie
paralelă cu orizontala (de aici "Skyhook") mai degrabă decât cu privire la suprafața inegală a
carosabilului.
Această strategie încearcă de a simula răspunsurile care ar apărea dacă un amortizor ar
fi montat între corpul vehiculului și o linie paralelă cu orizontala de pe cer, mai degrabă decât
dintre caroserie și roți. Când sunt aplicate în mod corespunzător, strategia "Skyhook" oferă un
condus calm, bun indiferent de condițiile de conducere sau de starea suprafeței drumului. În
scopul de a crea un răspuns, amortizoarele de la roți trebuie să aplice aceleași forțe
vehiculului ca și cum cele imaginare ar fi reale.
(2.14)
rezultă
(2.15)
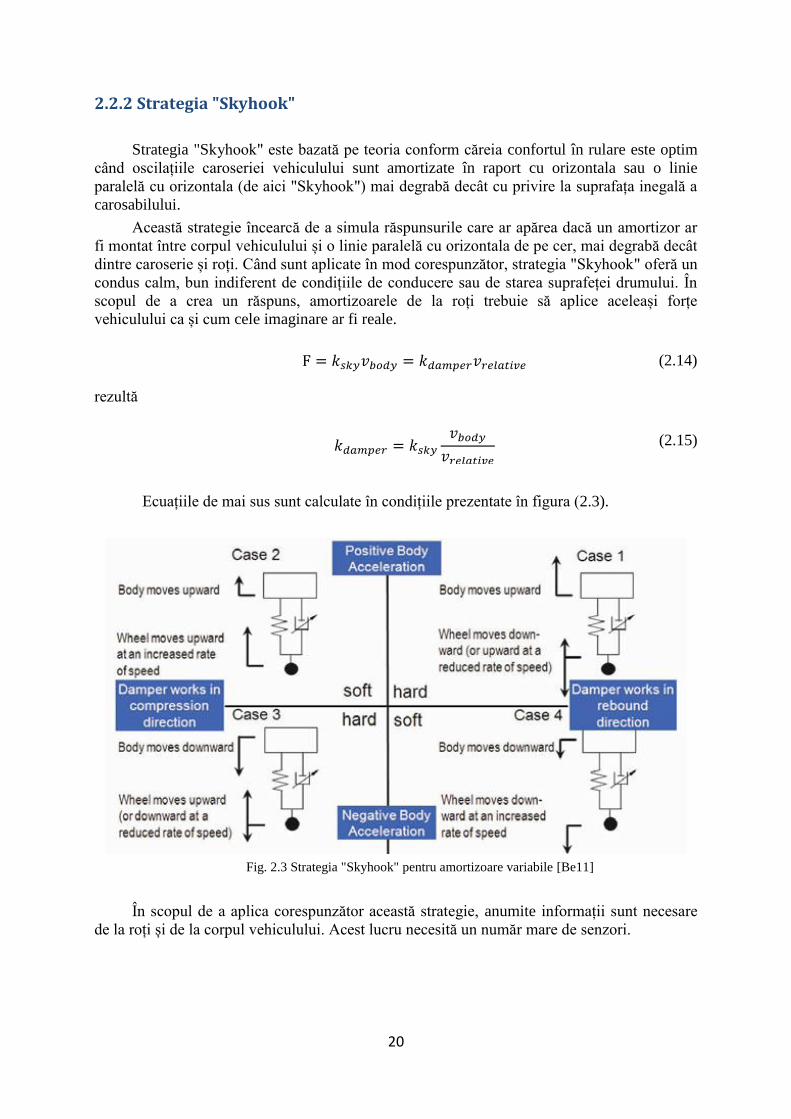
Ecuațiile de mai sus sunt calculate în condițiile prezentate în figura (2.3).
Fig. 2.3 Strategia "Skyhook" pentru amortizoare variabile [Be11]
În scopul de a aplica corespunzător această strategie, anumite informații sunt necesare
de la roți și de la corpul vehiculului. Acest lucru necesită un număr mare de senzori.
21
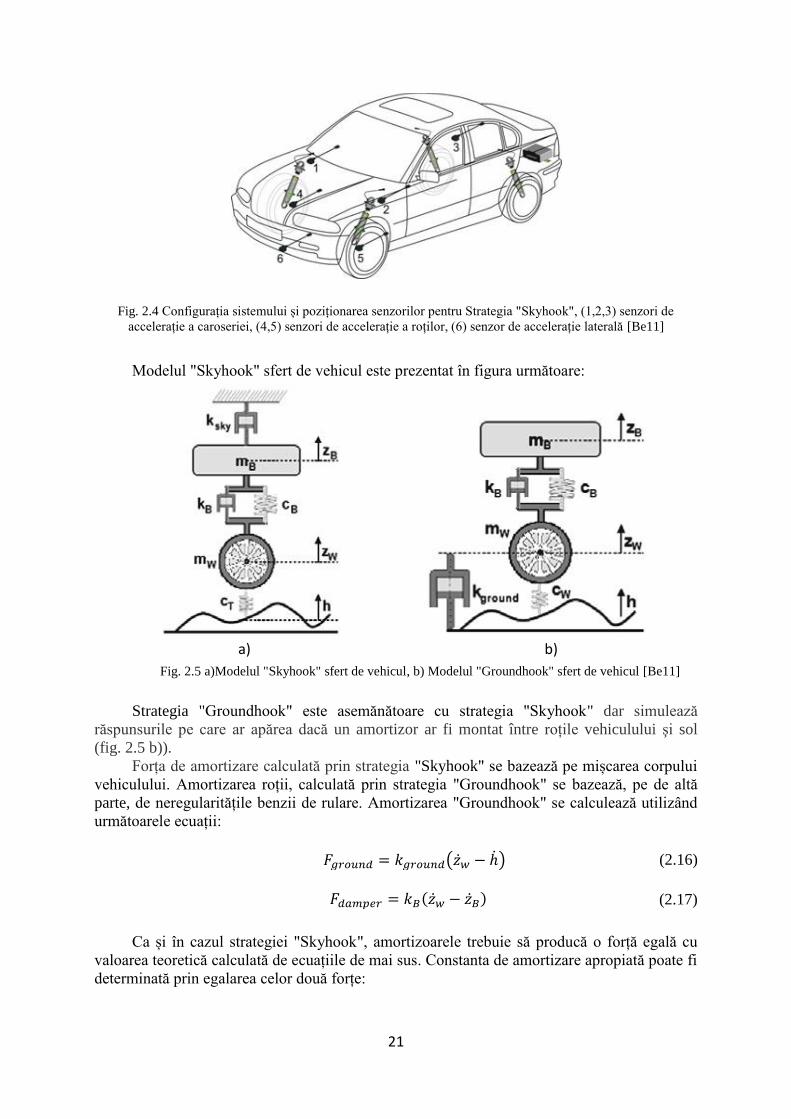
Fig. 2.4 Configurația sistemului și poziționarea senzorilor pentru Strategia "Skyhook", (1,2,3) senzori de
accelerație a caroseriei, (4,5) senzori de accelerație a roților, (6) senzor de accelerație laterală [Be11]
Modelul "Skyhook" sfert de vehicul este prezentat în figura următoare:
Fig. 2.5 a)Modelul "Skyhook" sfert de vehicul, b) Modelul "Groundhook" sfert de vehicul [Be11]
Strategia "Groundhook" este asemănătoare cu strategia "Skyhook" dar simulează
răspunsurile pe care ar apărea dacă un amortizor ar fi montat între roțile vehiculului şi sol
(fig. 2.5 b)).
Forța de amortizare calculată prin strategia "Skyhook" se bazează pe mișcarea corpului
vehiculului. Amortizarea roții, calculată prin strategia "Groundhook" se bazează, pe de altă
parte, de neregularitățile benzii de rulare. Amortizarea "Groundhook" se calculează utilizând
următoarele ecuații:
(2.16)
(2.17)
Ca și în cazul strategiei "Skyhook", amortizoarele trebuie să producă o forță egală cu
valoarea teoretică calculată de ecuațiile de mai sus. Constanta de amortizare apropiată poate fi
determinată prin egalarea celor două forțe:
a) b)
22
(2.18)
2.3 Modele reologice
Problema esenţială la proiectarea unor aplicaţii tehnice cu elemente disipative
utilizând materiale magneto-reologice este modelarea reologică a elementului utilizat.
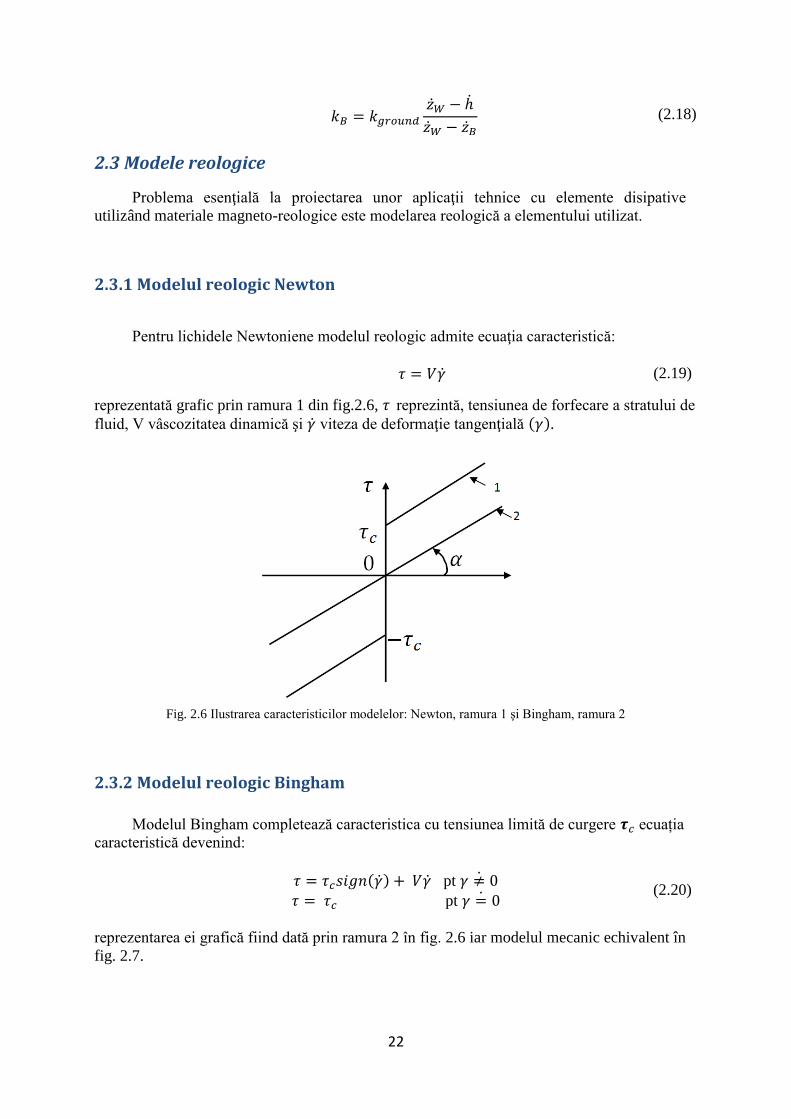
2.3.1 Modelul reologic Newton
Pentru lichidele Newtoniene modelul reologic admite ecuaţia caracteristică:
(2.19)
reprezentată grafic prin ramura 1 din fig.2.6, reprezintă, tensiunea de forfecare a stratului de
fluid, V vâscozitatea dinamică şi viteza de deformaţie tangenţială .
Fig. 2.6 Ilustrarea caracteristicilor modelelor: Newton, ramura 1 şi Bingham, ramura 2
2.3.2 Modelul reologic Bingham
Modelul Bingham completează caracteristica cu tensiunea limită de curgere ecuația
caracteristică devenind:
pt
pt (2.20)
reprezentarea ei grafică fiind dată prin ramura 2 în fig. 2.6 iar modelul mecanic echivalent în
fig. 2.7.

23
Fig. 2.7 Ilustrarea modelului Bingham
Mecanismul de disipaţie la o structură reală este foarte greu de modelat matematic. De
aceea, se apelează la definirea unei energii specifice de disipare:
(2.21)
pe un ciclu pentru o variație armonică a legii de deformare:
(2.22)
În cazul modelului newtonian, ținând cont de (2.19) se obține:
Experimental energia de disipație pe un ciclu se obține după cum urmează:
(2.24)
de unde
(2.25)
care pusă sub forma
(2.26)
reprezintă ecuaţia unei elipse axată după sistemul , (fig.2.8a) a cărei suprafaţă interioară
reprezintă valoarea energiei disipate . Curba eliptică reprezintă aşa numita buclă de
histerezis.
(2.23)

24
Fig. 2.8 Ilustrarea buclei de histerezis în cazul modelului Newton [Al11]
a) legătură pur vâscoasă b) legătură vâsco-elastică
Cum legăturile de interacțiune particule fluid, mai ales în prezența câmpului magnetic
conțin și componente elastice modelul Newtonian poate fi definit prin ecuația:
(2.27)
unde k este o constantă.
Pentru acest caz ecuația elipsei rezultante se va obține prin relația:
(2.28)
care devine
(2.29)
ecuație a unei elipse cu axele rotite cu unghiul față de sistemul (fig. 2.8b).
Suprafața buclei de histerezis este în acest caz:
(2.30)
egală cu cea a buclei reale de histerezis.
Dacă amortizarea este extrem de slabă (V 0)atunci suprafața elipsei tinde spre valoarea
zero iar ecuația (2.29) degenerează în ecuația unei drepte:
(2.31)
de unde
(2.32)
Pentru modelul Bingham definit de relațiile (2.20), calculate, în MathCad [Al11], prin
condiționarea:
25
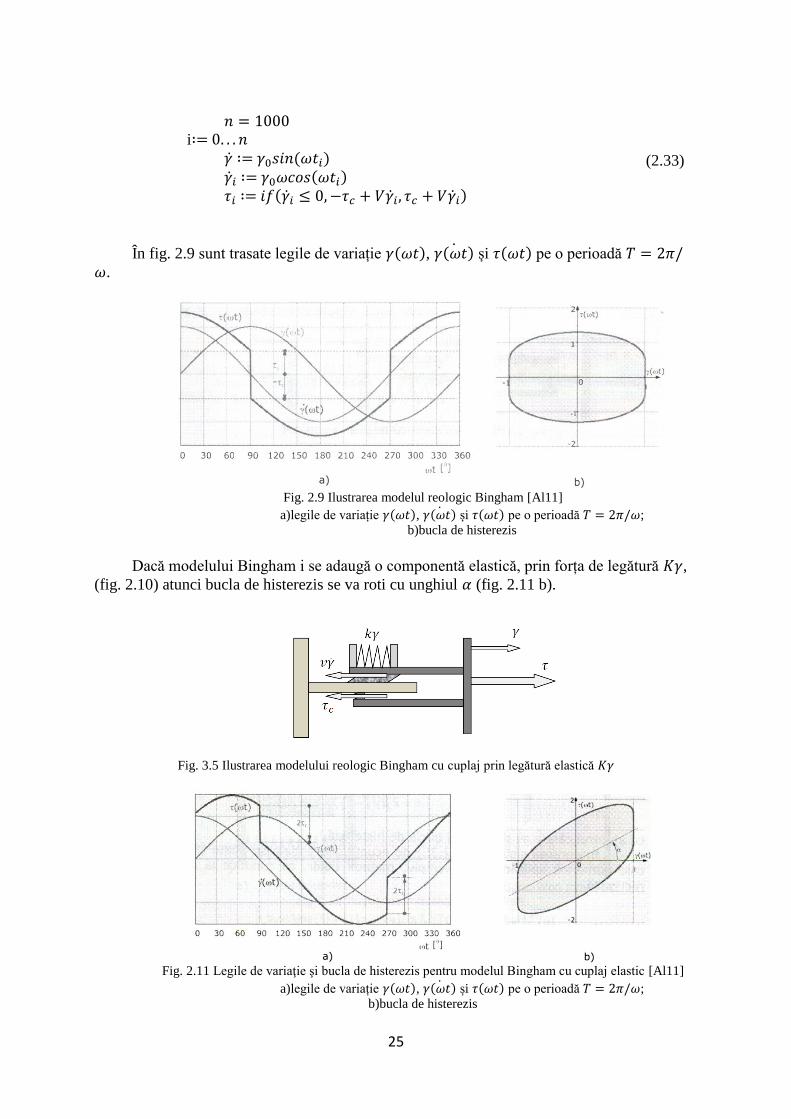
i
(2.33)
În fig. 2.9 sunt trasate legile de variație , și pe o perioadă .
Fig. 2.9 Ilustrarea modelul reologic Bingham [Al11] a)legile de variație , și pe o perioadă ;
b)bucla de histerezis
Dacă modelului Bingham i se adaugă o componentă elastică, prin forța de legătură ,
(fig. 2.10) atunci bucla de histerezis se va roti cu unghiul (fig. 2.11 b).
Fig. 3.5 Ilustrarea modelului reologic Bingham cu cuplaj prin legătură elastică
Fig. 2.11 Legile de variaţie şi bucla de histerezis pentru modelul Bingham cu cuplaj elastic [Al11]
a)legile de variație , și pe o perioadă ;
b)bucla de histerezis
26
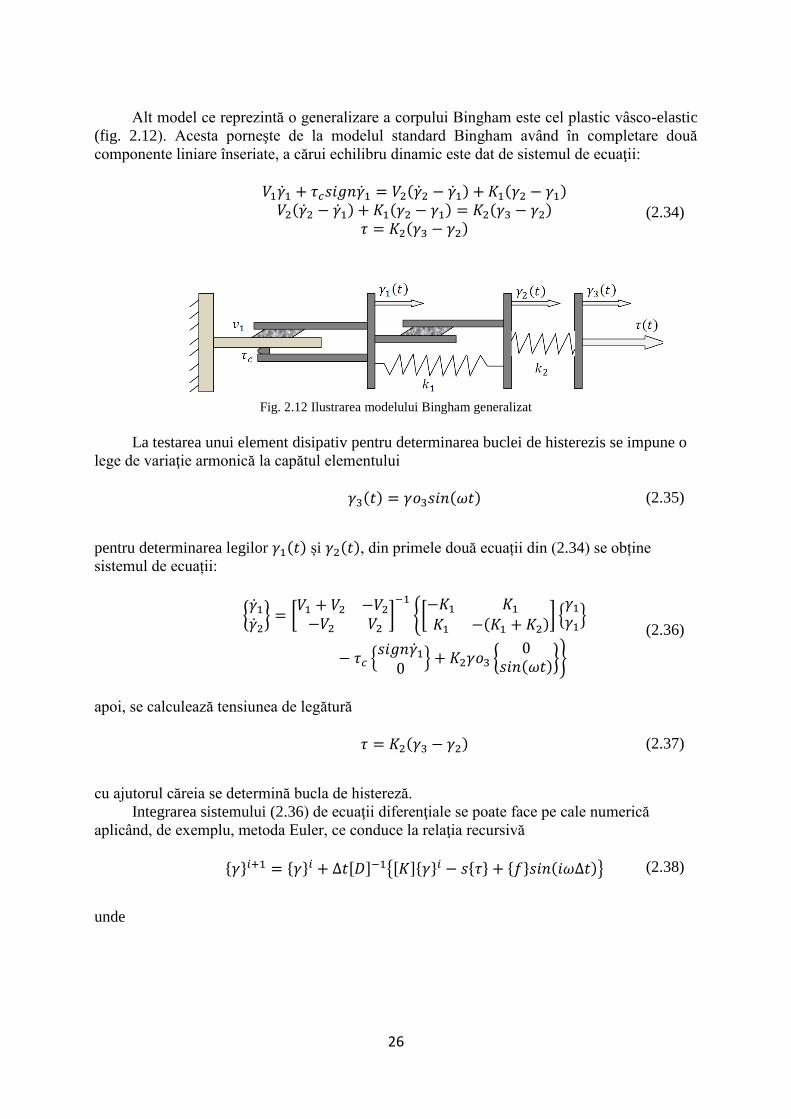
Alt model ce reprezintă o generalizare a corpului Bingham este cel plastic vâsco-elastic
(fig. 2.12). Acesta porneşte de la modelul standard Bingham având în completare două
componente liniare înseriate, a cărui echilibru dinamic este dat de sistemul de ecuaţii:
(2.34)
Fig. 2.12 Ilustrarea modelului Bingham generalizat
La testarea unui element disipativ pentru determinarea buclei de histerezis se impune o
lege de variaţie armonică la capătul elementului
(2.35)
pentru determinarea legilor și , din primele două ecuații din (2.34) se obține
sistemul de ecuații:
(2.36)
apoi, se calculează tensiunea de legătură
(2.37)
cu ajutorul căreia se determină bucla de histereză.
Integrarea sistemului (2.36) de ecuaţii diferenţiale se poate face pe cale numerică
aplicând, de exemplu, metoda Euler, ce conduce la relaţia recursivă
(2.38)
unde
27
(2.39)
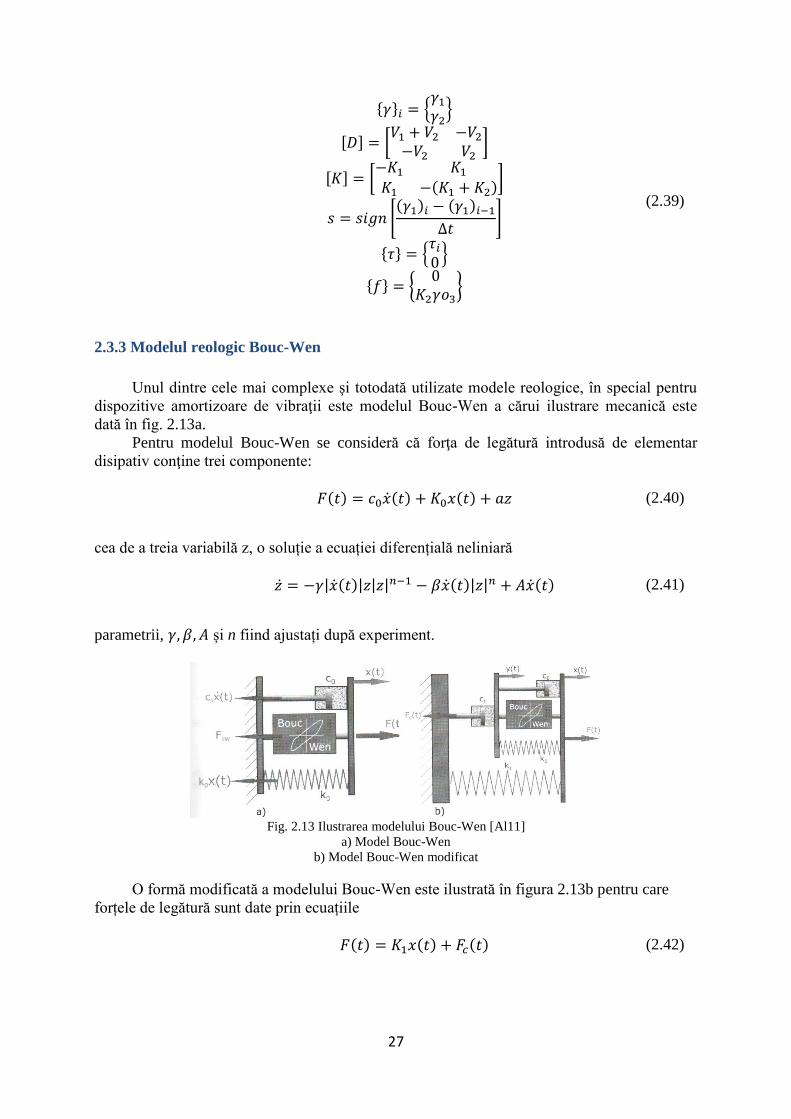
2.3.3 Modelul reologic Bouc-Wen
Unul dintre cele mai complexe şi totodată utilizate modele reologice, în special pentru
dispozitive amortizoare de vibraţii este modelul Bouc-Wen a cărui ilustrare mecanică este
dată în fig. 2.13a.
Pentru modelul Bouc-Wen se consideră că forţa de legătură introdusă de elementar
disipativ conţine trei componente:
(2.40)
cea de a treia variabilă z, o soluție a ecuației diferențială neliniară
(2.41)
parametrii, și n fiind ajustați după experiment.
Fig. 2.13 Ilustrarea modelului Bouc-Wen [Al11]
a) Model Bouc-Wen
b) Model Bouc-Wen modificat
O formă modificată a modelului Bouc-Wen este ilustrată în figura 2.13b pentru care
forțele de legătură sunt date prin ecuațiile
(2.42)

28
(2.43)
unde
(2.44)
2.3.4 Modelul reologic Oh-Onoda
Modelul Oh-Onoda, ilustrat în fig.2.14, ia în considerare influenţa câmpului magnetic,
prin intensitatea H, astfel că între elementele 1 şi 2 în mişcare de translaţie după legile x(t) şi
y(t) iau naştere forţele de legătură:
(2.45)
disipative în stratul de MRE, (caracteristica în fig.2.14), controlabilă prin coeficientul c(H),
dependent de intensitatea H a câmpului magnetic, iar forţa de fricţiune:
(2.46)
având o componentă constantă , la momentul corespunzătoare unei deplasări
relative inițială , pentru care
(2.47)
Din echilibrul forțelor de legătură rezultă:
(2.48)
Pentru modelarea unui amortizor asamblat trebuie să se ţină seama şi de masele în
mişcare, ale pistonului şi tijei, şi de aceea modelului din figura 2.14 i se ataşează masa m iar
în relaţiile (2.48) intervine forţa de inerţie:
(2.49)

29
Fig. 2.14 Ilustrarea modelului Oh-Onoda cu caracteristica viteză [Al11]
2.3.5 Modelul reologic Choi
Modelul Choi consideră pentru modelarea caracteristicii forţă disipativă - viteză
relativă o formă polinomială de ordinul 6:
(2.50)
coeficienţii fiind determinaţi pe baza identificării cu date experimentale.
În lucrarea [Ch11], Choi a observat că modelul Bingham nu poate simula
comportamentul histerezis în totalitate, deşi este prezisă amplitudinea forţei de amortizare la o
anumită viteză a pistonului.
30
III. STADIUL ACTUAL AL SISTEMELOR DE CONTROL A SUSPENSIEI AUTOVEHICULELOR
3.1 Introducere
Sistemule de suspensii sunt subansamble vitale pentru un automobil modern, rolul lor
fiind de a asigura nu numai creșterea securității şi manevrabilității, ci şi un confort optim şi
agilitate.
Amortizoarele convenţionale deşi foarte sofisticate la ora actuală, nu pot răspunde
instantaneu şi optim la schimbările condiţiilor de rulare sau ale stilului de conducere. Aici
viteza de reacţie este controlată prin intermediul electronicii, mai exact printr-un sistem
automat, controlul electric al amortizoarelor.
Senzorii acestui sistem determină caracteristicile căii de rulare şi stilul conducătorului
auto, datele sunt evaluate de microprocesoare, care comandă amortizoarelor setarea optimă,
de la „confort” la „sport”. Acest lucru nu se întâmplă numai în mod automat, cel de la volan
având şi el posibilitatea de a preselecta singur un anumit mod de răspuns al amortizoarelor.
Acest sistem creşte confortul, însă în anumite limite.
Dacă pavajul este prost, existând multe denivelări, o suspensie prea confortabilă va duce
la vibraţii neplăcute transmise caroseriei. Sistemele de control sesizează momentul
premergător acestor vibraţii şi comandă întărirea suspensiei de câte ori situaţia o cere.
Opţional, este disponibil un sistem de suspensie pneumatică cu punte dublă şi sistem
automat de menţinere constantă a gărzii de sol. Sistemul de reglare a distanţei faţă de sol
poate comanda coborârea nivelului cu până la 35 mm pentru accesul în sau din autovehicul,
de exemplu, sau, dimpotrivă, garda la sol poate fi mărită cu 25 mm pentru condiţii de teren
accidentat. Sistemul beneficiază de un rezervor de aer comprimat, cu acţiune rapidă, ajustarea
distanţei la sol fiind realizată în funcţie de viteza de deplasare, pentru păstrarea unei ţinute de
drum cât mai bune.
Confortul presupune setări moi ale suspensiei, care duc la mişcări ample de ruliu sau
tangaj. Pe de altă parte, o suspensie mai rigidă asigură o stabilitate bună în curbe, însă
confortul este redus. Controlul barei stabilizatoare este un sistem electronic care reuşeşte să
combine confortul cu sportivitatea.
Principalele componente ale acestuia sunt două bare antiruliu active, care, în câteva
fracţiuni de secundă, primesc comanda de la unitatea de control pentru a contracara mişcarea
de ruliu în viraj. Acest sistem acţionează şi în cazul rulării în linie dreaptă, când roţile de pe o
parte sunt pe o porţiune de carosabil degradată.
În mod normal, acest lucru ar influenţa şi suspensiile celorlalte roţi ale punţilor, însă,
datorită barelor antiruliu active, acest lucru nu se întâmplă, iar automobilul rămâne confortabil
pe traiectorie. Dynamic Drive mai are şi rolul de a adapta comportamentul maşinii în funcţie
de viteză şi stilul de conducere.
La viteze mici şi medii, forţele stabilizatoare sunt păstrate în raport aproximativ egal,
pentru un comportament neutru al maşinii. La viteze mari, maşina capătă un caracter
subvirator, forţele stabilizatoare fiind aplicate asupra punţii din faţă. Acest lucru face
comportamentul maşinii mai uşor de controlat pentru şoferii neexperimentaţi, pentru care
supravirarea maşinii devine periculoasă.
31
3.2 Suspensia controlată electronic, Renault Safrane
Sistemul de suspensie controlat electronic pe vehiculul Renault Safrane are două funcții:
Amortizoare variabile(AMV) care au trei nivele de funcționare(Mediu, Sport și
Confort), nivele care pot fi selectate manual sau automat în funcție de
condițiile de utilizare a vehiculului;
Corecția de asietă(COA) permite reglarea înălțimii vehiculului în trei
poziții(Normal, Înalt și Autostradă) în funcție de condițiile de utilizare a
acestuia.
Acest sistem îmbunătățește confortul la conducere, oferă o mare flexibilitate la drumuri
scurte oferind în același timp performanțe bune atunci când vehiculul este supus și la sarcini.
Sistemul permite menținerea constantă a înălțimii vehiculului indiferent de încărcătura
acestuia.
Aceste două funcții sunt controlate de un singur calculator. Aceasta permite controlul
funcțiilor complexe și de mare finețe, a funcționării în mod degradat și trecerea la sistemul
normal când o componentă cedează.
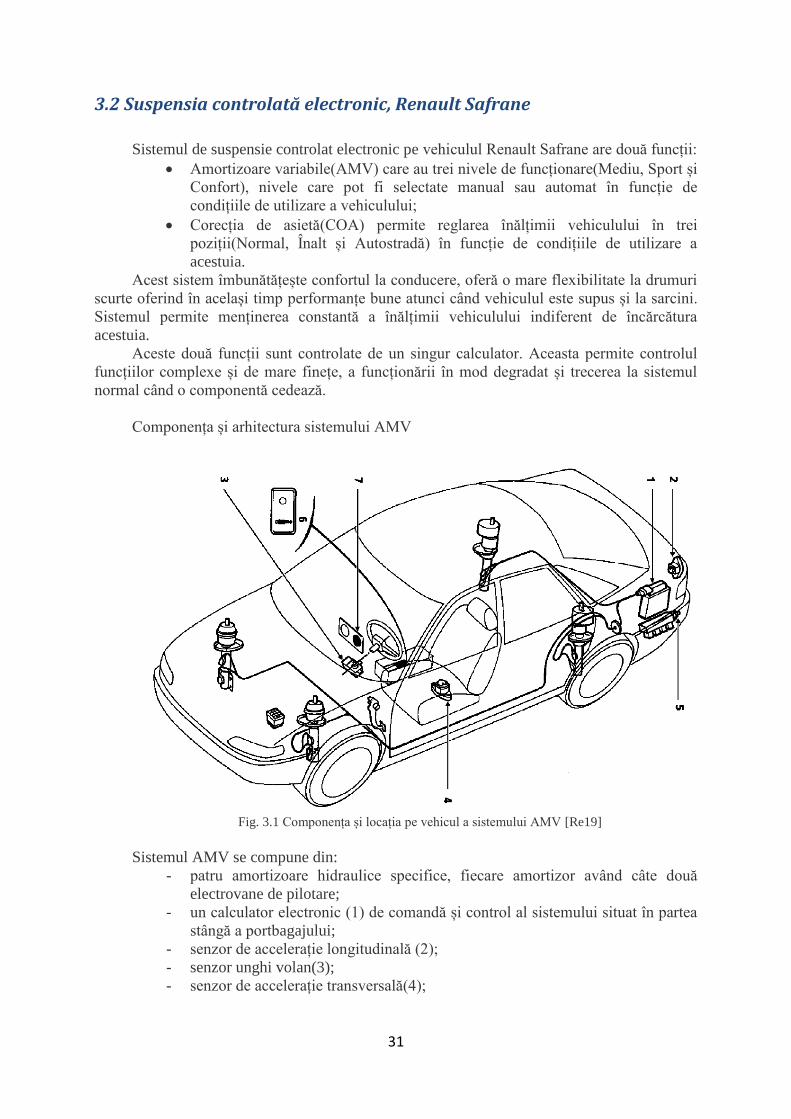
Componența și arhitectura sistemului AMV
Fig. 3.1 Componența și locația pe vehicul a sistemului AMV [Re19]
Sistemul AMV se compune din:
- patru amortizoare hidraulice specifice, fiecare amortizor având câte două
electrovane de pilotare;
- un calculator electronic (1) de comandă și control al sistemului situat în partea
stângă a portbagajului;
- senzor de accelerație longitudinală (2);
- senzor unghi volan(3);
- senzor de accelerație transversală(4);
32
- un senzor(5) ce măsoară încărcătura pusă pe vehicul, principul de funcționare
fiind celui unui reostat;
- interfață șofer/vehicul: cutie de comandă și semnalizare situată pe consola
centrală.
Se mai folosesc semnalele de viteză vehicul și contactor stop.
Fig. 3.2 Arhitectura sistemului AMV [Re19]
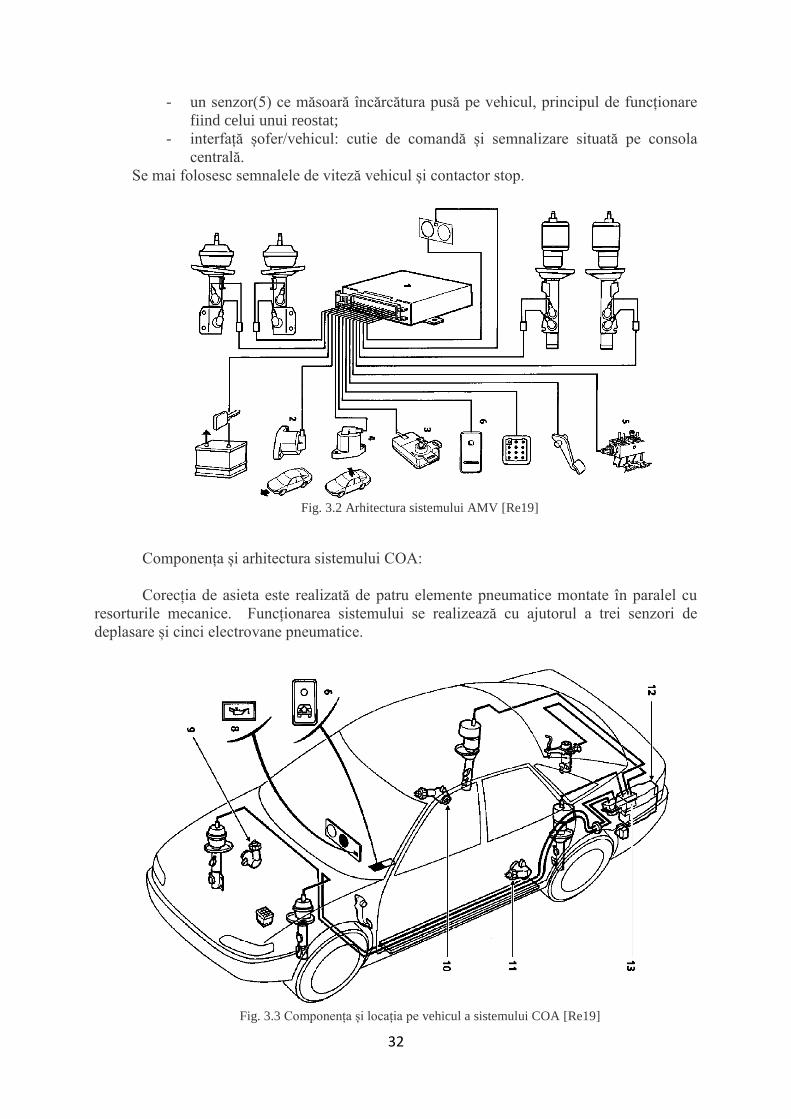
Componența și arhitectura sistemului COA:
Corecția de asieta este realizată de patru elemente pneumatice montate în paralel cu
resorturile mecanice. Funcționarea sistemului se realizează cu ajutorul a trei senzori de
deplasare și cinci electrovane pneumatice.
Fig. 3.3 Componența și locația pe vehicul a sistemului COA [Re19]
33
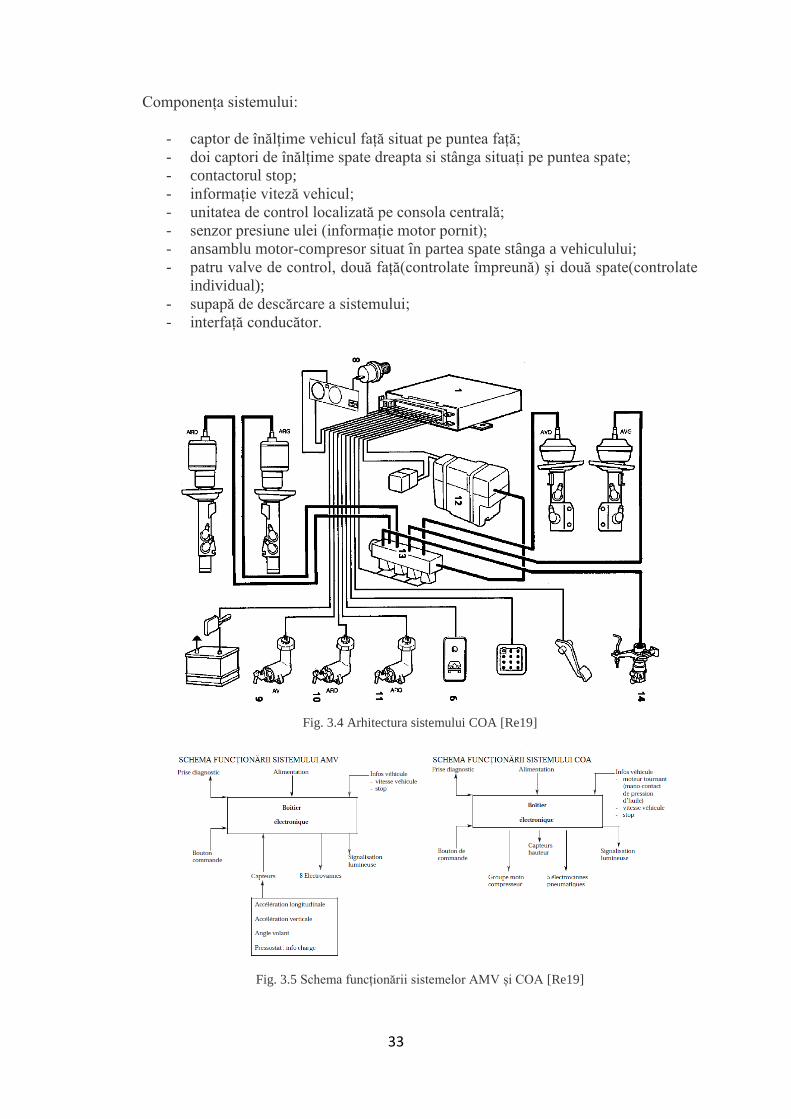
Componența sistemului:
- captor de înălțime vehicul față situat pe puntea față;
- doi captori de înălțime spate dreapta si stânga situați pe puntea spate;
- contactorul stop;
- informație viteză vehicul;
- unitatea de control localizată pe consola centrală;
- senzor presiune ulei (informație motor pornit);
- ansamblu motor-compresor situat în partea spate stânga a vehiculului;
- patru valve de control, două față(controlate împreună) și două spate(controlate
individual);
- supapă de descărcare a sistemului;
- interfață conducător.
Fig. 3.4 Arhitectura sistemului COA [Re19]
Fig. 3.5 Schema funcționării sistemelor AMV și COA [Re19]
34
Principiul de funcționare al amortizoarelor variabile (AMV):
Două moduri de operare sunt posibile:
- Modul automat. La punerea contactului acest mod este activat și în
funcție de stilul de conducere și suprafața căii de rulare, unitatea de control
selectează unul din cele trei moduri: "Confort","Mediu","Sport", pentru a oferi
confortul și siguranța în vehicul.
- Modul manual. Prin apăsarea contactorului, de exemplu "Sport",
trecerea la acest mod este confirmată prin indicatorul luminos de pe contactor,
indicator care rămâne aprins când sistemul este activat. Pentru dezactivare
modului se apasă din nou contactorul.
La fiecare schimbare de stare a suspensiei este asociată o temporizare care permite
sistemului să elimine stările tranzitorii nedorite.
Funcționarea sistemului este confirmată de indicatorul din tabloul de bord, indicator
care la punerea contactului se aprinde 2,5 secunde, fapt ce indică funcționarea normală a
sistemului. În caz de defecțiune a sistemului la punerea contactului indicatorul luminos din
tabloul de bord rămâne tot timpul aprins.
Principiul de funcționare al corecției de asietă(COA):
Funcția se bazează pe o corecție lentă la trei înălțimi asigurându-se astfel compensarea
greutății care este adăugată sau eliminată vehiculului:
- Poziția normală (N):
- Poziția înalta (H) de trecere peste obstacule;
- Poziția autostradă (B), îmbunătățește factorul de tracțiune prin
reducerea rezistenței aerodinamice.
Variația înălțimii vehiculului în funcție și de încărcătură este controlată de unitatea de
control, care în funcție de valorile predefinite crește sau scade presiunea în sistem.
La pornirea motorului sistemul intră în modul automat pentru a asigura corecția
necesară indiferent de greutatea pe vehicul. Când vehiculul depășește 120 km/h timp de șapte
minute sistemul intră automat în poziția autostradă(-15 mm față de poziția normală) pentru a
îmbunătății aerodinamica acestuia. Vehiculul revine la poziția normală dacă este detectată o
suprafață a căii de rulare necorespunzătoare cu poziția sistemului și atunci când viteza
vehiculului scade sub 80 km/h.
Poziția înaltă(+ 15 mm față de poziția normală) se selectează manual prin apăsarea
contactorului de pe consolă. Indicatorul luminos de pe contactor clipește și rămâne aprins
când poziția este atinsă. Această poziție este folosită la trecerea peste obstacole și în rulaj pe o
cale de rulare defectuoasă. Vehiculul trece automat în poziția normală dacă viteza acestuia
trece de 100 km/h și se întoarce la această poziție daca viteza scade sub 25 km/h.
Martorul luminos din tabloul de bord care indică funcționarea sistemului și modul de
avarie este același cu cel al sistemului AMV.

35
3.3 Sistemul Bilstein Damtronic, Nissan GT-R
Nissan GT-R are un nou tip de suspensie care oferă o excelentă stabilitate în linie
dreaptă, chiar şi peste 300 km/h, o bună manipulare şi frânare în toate situaţiile - de la naveta
obișnuită în mediul urban, la drumurile înzăpezite şi noroioase și la pista de curse. Suspensia
oferă echilibrul perfect al încărcăturii pe toate cele patru roti [Gt13].
Fig. 3.6 Suspensiile față și spate ale Nissan GT-R [Gt11]
Descrierea sistemului:
Sistemul Bilstein Damptronic este compus în principal din unitatea de control
E-SUS, senzor vertical G pe punte față, senzor vertical G pe punte spate și
actuatorii din amortizoarele față și spate.
Informațiile primite de la calculatorul de injecție, calculatorul ABS, senzorul
unghi volan, senzorii verticali G față și spate sunt procesate de calculatorul E-
SUS al sistemului, calculator care la rândul lui transmite valorile calculate
către actuatorii amortizoarelor controlând astfel forțele de amortizare.
Informațiile se transmit prin rețeaua CAN a vehiculului, sistemul fiind
diagnosticabil cu ajutorul testerului de diagnosticare.
Fig. 3.7 Diagrama sistemului Bilstein Damptronic [Ni10]
36
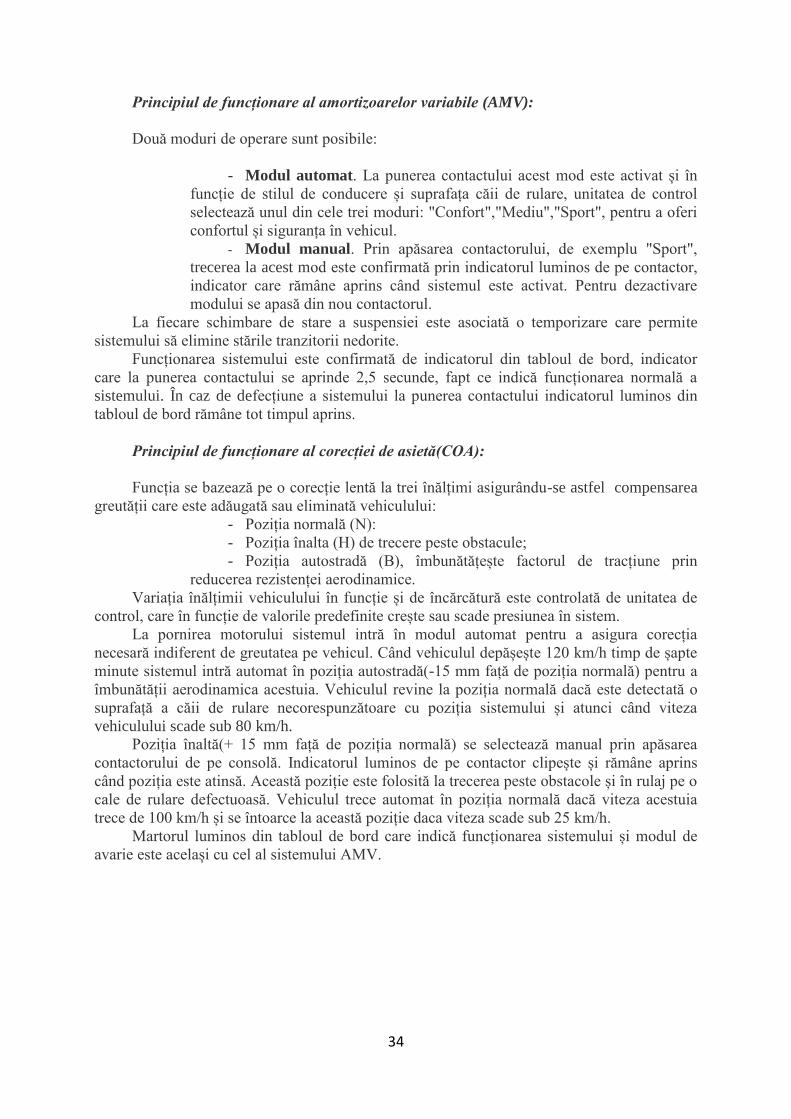
Principiul de funcționare:
Un comutator permite șoferului să acceseze trei moduri diferite de suspensie: R (de
înaltă performanţă), Sport (setarea normală) şi Confort (conducere pe drumuri dificile).
Comutatorul modifică electronic setările de pe amortizoarele Bilstein Damptronic în felul
următor:
- Când valva (2) este închisă de către miezul solenoidului (1) se obține o
rezistență mare la curgerea uleiului astfel forța de amortizare este mare.
Fig. 3.8 Valvă amortizor în poziția închisă, forță de amortizare mare [Ni10]
- Când valva (2) este deschisă activând solenoidul (1) uleiul curge prin două
pasaje diferite astfel rezistența la curgere a uleiului scade obținându-se o forță
de amortizare redusă.
Fig. 3.9 Valvă amortizor în poziția deschisă, forță de amortizare mică [Ni10]
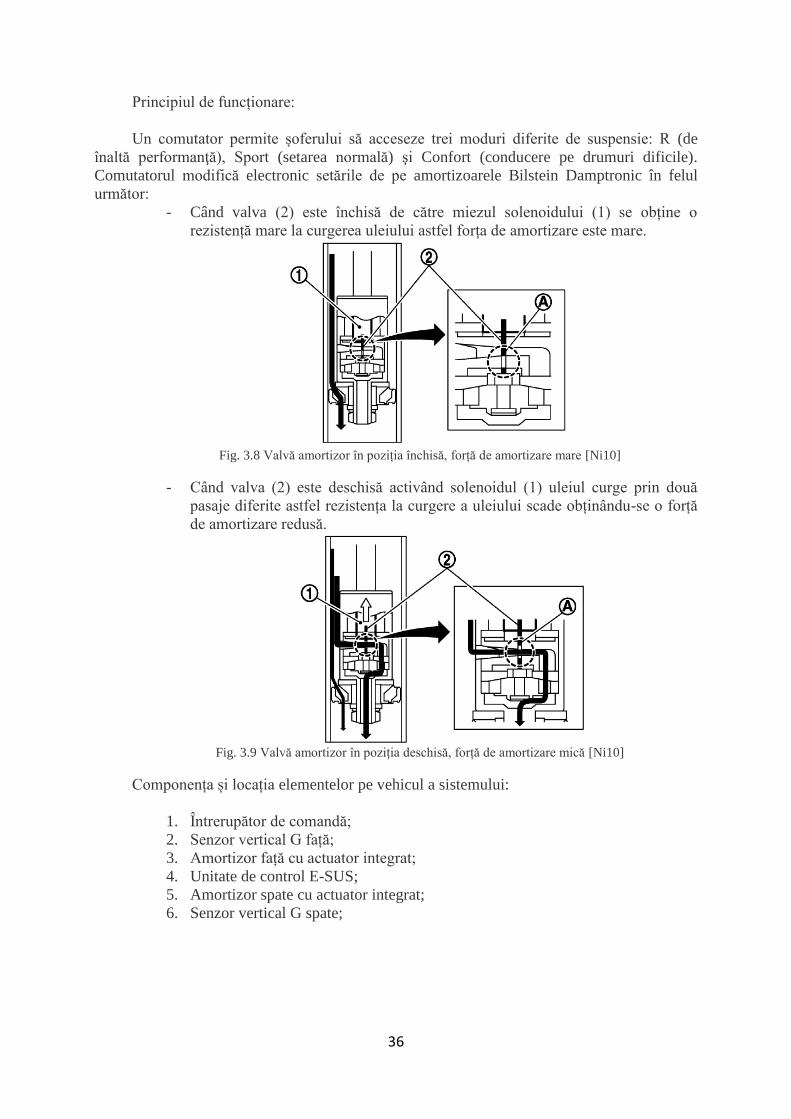
Componența și locația elementelor pe vehicul a sistemului:
1. Întrerupător de comandă;
2. Senzor vertical G față;
3. Amortizor față cu actuator integrat;
4. Unitate de control E-SUS;
5. Amortizor spate cu actuator integrat;
6. Senzor vertical G spate;
37
Fig. 3.10 Locația elementelor pe vehicul a sistemului [Ni10]
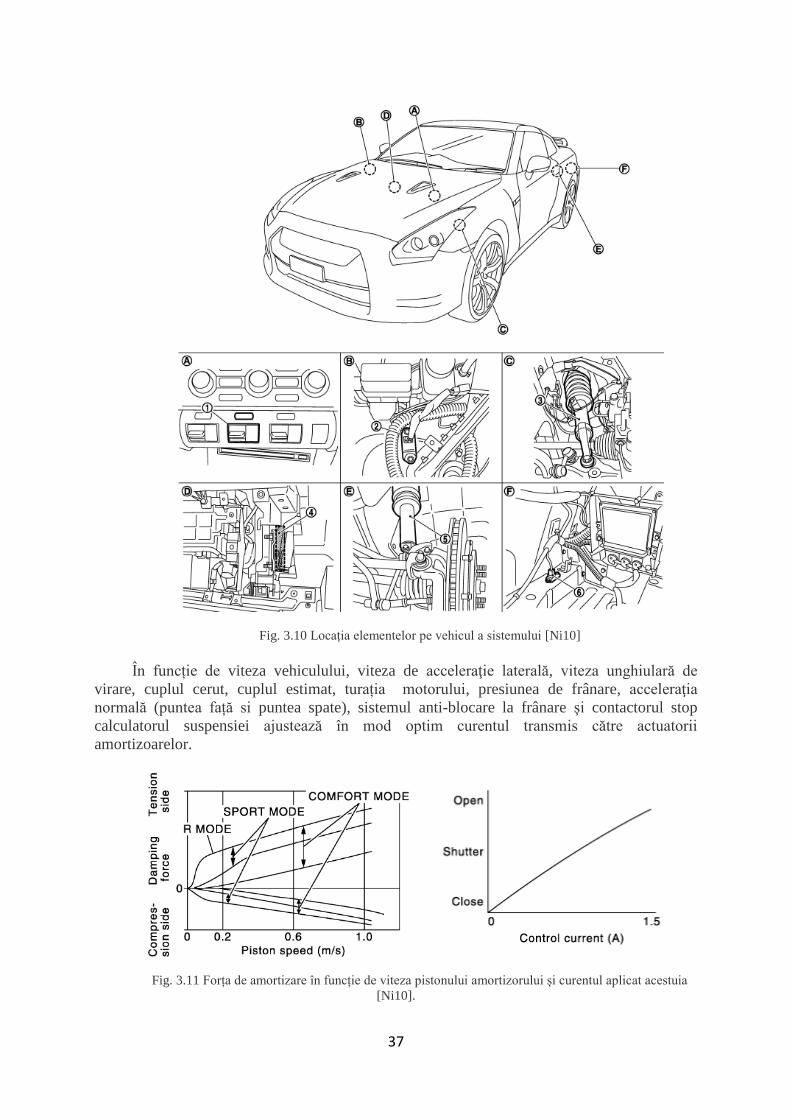
În funcție de viteza vehiculului, viteza de acceleraţie laterală, viteza unghiulară de
virare, cuplul cerut, cuplul estimat, turația motorului, presiunea de frânare, acceleraţia
normală (puntea față si puntea spate), sistemul anti-blocare la frânare şi contactorul stop
calculatorul suspensiei ajustează în mod optim curentul transmis către actuatorii
amortizoarelor.
Fig. 3.11 Forța de amortizare în funcție de viteza pistonului amortizorului și curentul aplicat acestuia
[Ni10].
38
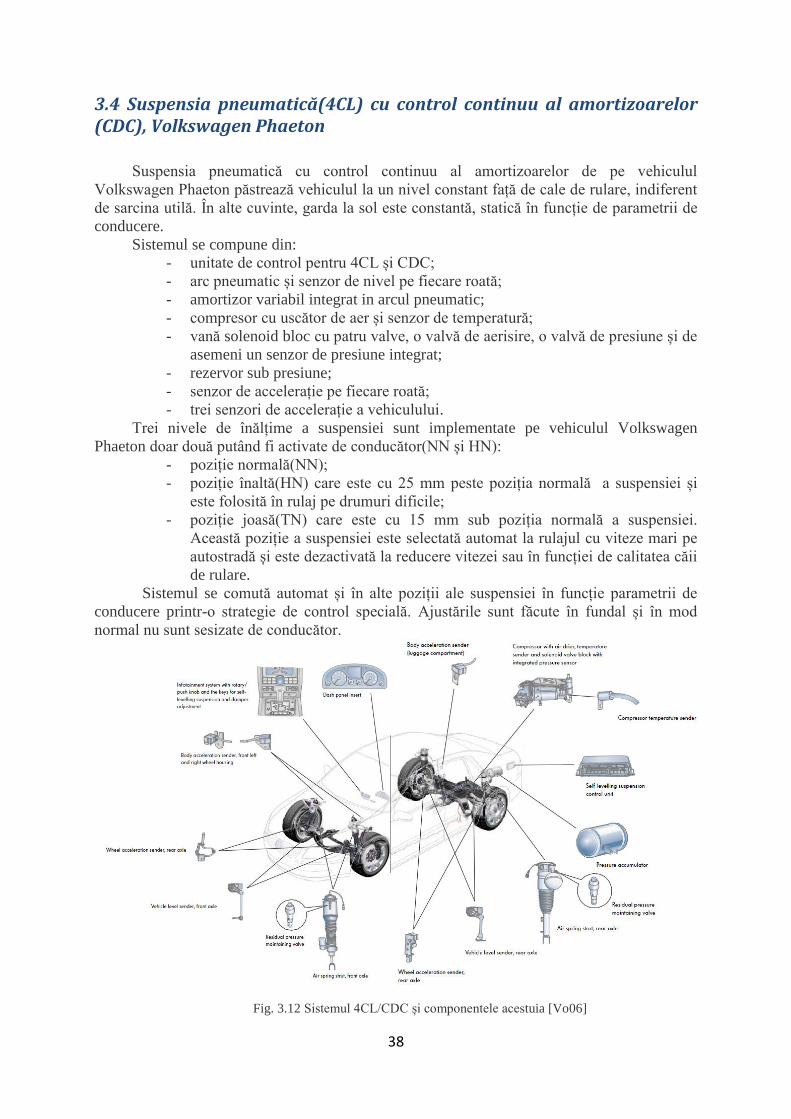
3.4 Suspensia pneumatică(4CL) cu control continuu al amortizoarelor (CDC), Volkswagen Phaeton
Suspensia pneumatică cu control continuu al amortizoarelor de pe vehiculul
Volkswagen Phaeton păstrează vehiculul la un nivel constant față de cale de rulare, indiferent
de sarcina utilă. În alte cuvinte, garda la sol este constantă, statică în funcție de parametrii de
conducere.
Sistemul se compune din:
- unitate de control pentru 4CL și CDC;
- arc pneumatic și senzor de nivel pe fiecare roată;
- amortizor variabil integrat in arcul pneumatic;
- compresor cu uscător de aer și senzor de temperatură;
- vană solenoid bloc cu patru valve, o valvă de aerisire, o valvă de presiune și de
asemeni un senzor de presiune integrat;
- rezervor sub presiune;
- senzor de accelerație pe fiecare roată;
- trei senzori de accelerație a vehiculului.
Trei nivele de înălțime a suspensiei sunt implementate pe vehiculul Volkswagen
Phaeton doar două putând fi activate de conducător(NN și HN):
- poziție normală(NN);
- poziție înaltă(HN) care este cu 25 mm peste poziția normală a suspensiei și
este folosită în rulaj pe drumuri dificile;
- poziție joasă(TN) care este cu 15 mm sub poziția normală a suspensiei.
Această poziție a suspensiei este selectată automat la rulajul cu viteze mari pe
autostradă și este dezactivată la reducere vitezei sau în funcției de calitatea căii
de rulare.
Sistemul se comută automat și în alte poziții ale suspensiei în funcție parametrii de
conducere printr-o strategie de control specială. Ajustările sunt făcute în fundal și în mod
normal nu sunt sesizate de conducător.
Fig. 3.12 Sistemul 4CL/CDC și componentele acestuia [Vo06]
39
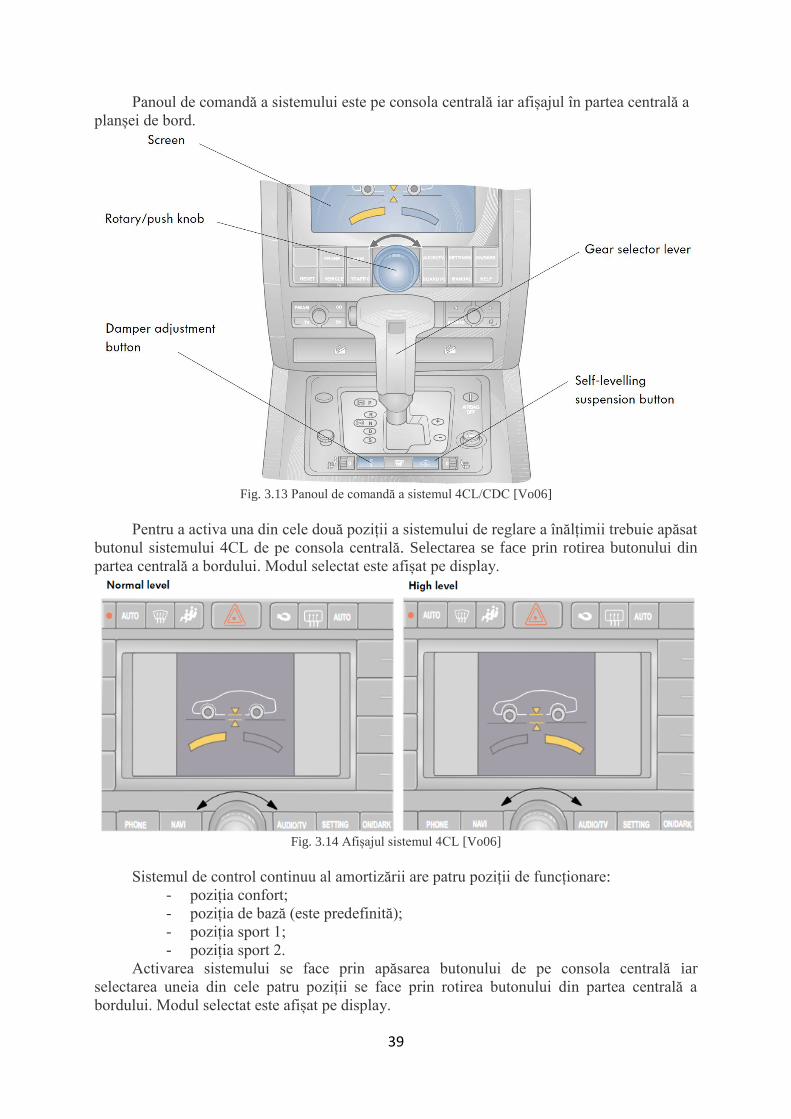
Panoul de comandă a sistemului este pe consola centrală iar afișajul în partea centrală a
planșei de bord.
Fig. 3.13 Panoul de comandă a sistemul 4CL/CDC [Vo06]
Pentru a activa una din cele două poziții a sistemului de reglare a înălțimii trebuie apăsat
butonul sistemului 4CL de pe consola centrală. Selectarea se face prin rotirea butonului din
partea centrală a bordului. Modul selectat este afișat pe display.
Fig. 3.14 Afișajul sistemul 4CL [Vo06]
Sistemul de control continuu al amortizării are patru poziții de funcționare:
- poziția confort;
- poziția de bază (este predefinită);
- poziția sport 1;
- poziția sport 2.
Activarea sistemului se face prin apăsarea butonului de pe consola centrală iar
selectarea uneia din cele patru poziții se face prin rotirea butonului din partea centrală a
bordului. Modul selectat este afișat pe display.

40
Fig. 3.15 Afișajul sistemul CDC [Vo06]
Strategia de control a sistemului 4CL
Poziția vehiculului la nivelul fiecărei roți este măsurată de patru senzori de nivel care
sunt situați între brațul inferior și cadru motor iar valorile măsurate sunt comparate cu cele
standard care sunt memorate în unitatea de control.
Cantitatea de aer necesară sistemului este furnizată de compresor care furnizează o
presiune maximă de 16 bari. Când viteza vehiculului crește peste 35 km/h ajustarea presiunii
în sistem este făcută de către compresor, sub 35 km/h presiunea este reglată de către
rezervorul sub presiune. Pentru funcționarea sistemului între rezervorul sub presiune si
elementele pneumatice trebuie sa fie o diferență de presiune de minim trei bari.
În cazul în care înălțimea vehiculului se modifică în ceea ce privește suprafața drumului
din cauza proceselor de încărcare și descărcare, unitatea de control re-ajustează înălțimea
vehiculului la nivelul nominal.
Fig. 3.16 Diagrama schematică a reglării automate a sistemului 4CL [Vo06]
41
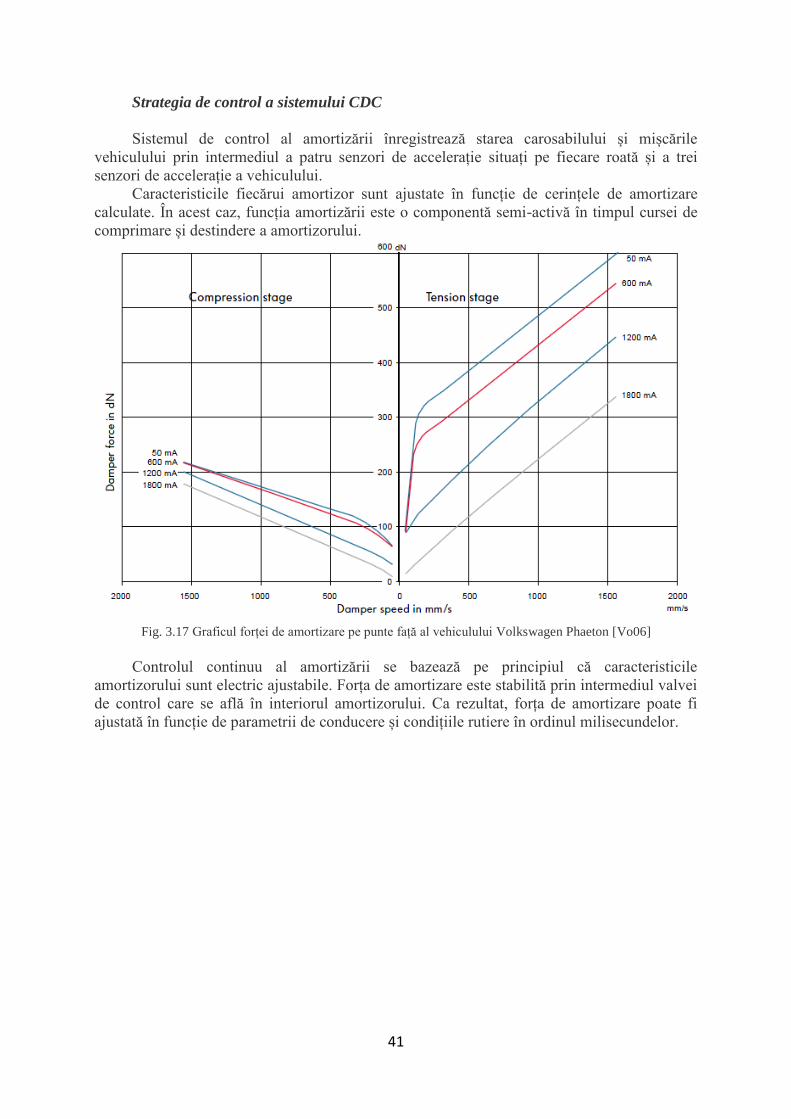
Strategia de control a sistemului CDC
Sistemul de control al amortizării înregistrează starea carosabilului și mișcările
vehiculului prin intermediul a patru senzori de accelerație situați pe fiecare roată și a trei
senzori de accelerație a vehiculului.
Caracteristicile fiecărui amortizor sunt ajustate în funcție de cerințele de amortizare
calculate. În acest caz, funcția amortizării este o componentă semi-activă în timpul cursei de
comprimare și destindere a amortizorului.
Fig. 3.17 Graficul forței de amortizare pe punte față al vehiculului Volkswagen Phaeton [Vo06]
Controlul continuu al amortizării se bazează pe principiul că caracteristicile
amortizorului sunt electric ajustabile. Forța de amortizare este stabilită prin intermediul valvei
de control care se află în interiorul amortizorului. Ca rezultat, forța de amortizare poate fi
ajustată în funcție de parametrii de conducere și condițiile rutiere în ordinul milisecundelor.
42
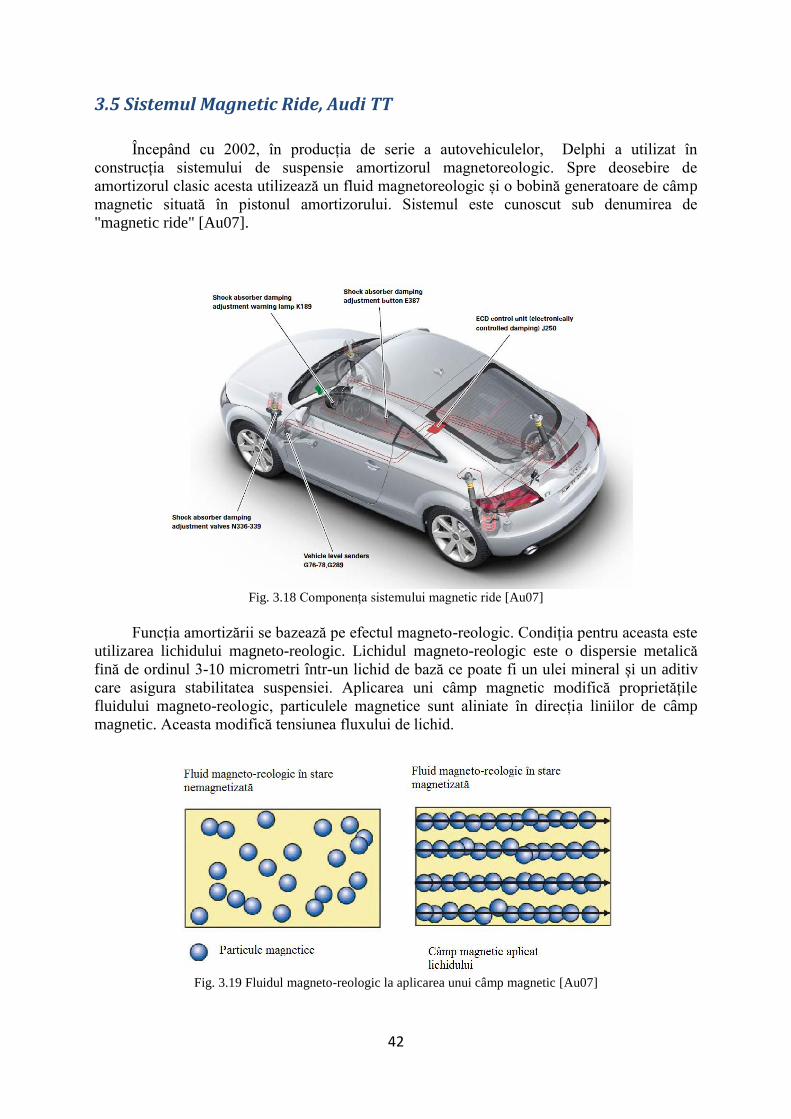
3.5 Sistemul Magnetic Ride, Audi TT
Începând cu 2002, în producția de serie a autovehiculelor, Delphi a utilizat în
construcția sistemului de suspensie amortizorul magnetoreologic. Spre deosebire de
amortizorul clasic acesta utilizează un fluid magnetoreologic și o bobină generatoare de câmp
magnetic situată în pistonul amortizorului. Sistemul este cunoscut sub denumirea de
"magnetic ride" [Au07].
Fig. 3.18 Componența sistemului magnetic ride [Au07]
Funcția amortizării se bazează pe efectul magneto-reologic. Condiția pentru aceasta este
utilizarea lichidului magneto-reologic. Lichidul magneto-reologic este o dispersie metalică
fină de ordinul 3-10 micrometri într-un lichid de bază ce poate fi un ulei mineral și un aditiv
care asigura stabilitatea suspensiei. Aplicarea uni câmp magnetic modifică proprietățile
fluidului magneto-reologic, particulele magnetice sunt aliniate în direcția liniilor de câmp
magnetic. Aceasta modifică tensiunea fluxului de lichid.
Fig. 3.19 Fluidul magneto-reologic la aplicarea unui câmp magnetic [Au07]
43
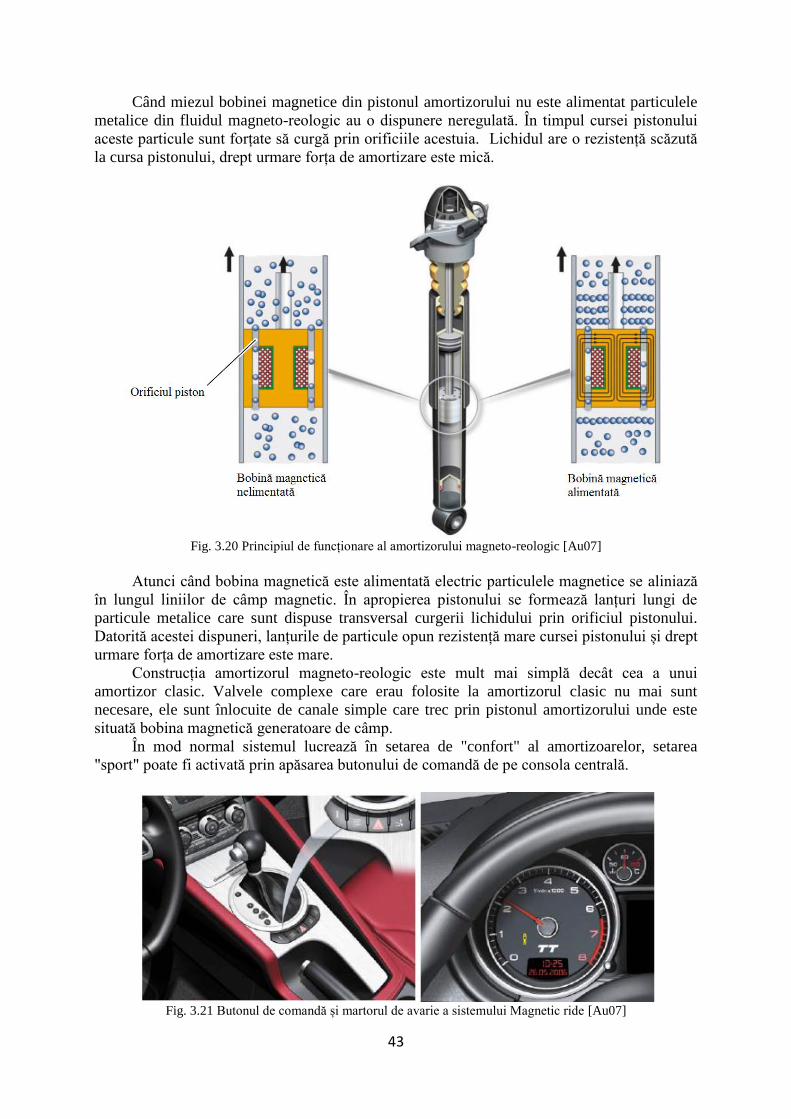
Când miezul bobinei magnetice din pistonul amortizorului nu este alimentat particulele
metalice din fluidul magneto-reologic au o dispunere neregulată. În timpul cursei pistonului
aceste particule sunt forțate să curgă prin orificiile acestuia. Lichidul are o rezistență scăzută
la cursa pistonului, drept urmare forța de amortizare este mică.
Fig. 3.20 Principiul de funcționare al amortizorului magneto-reologic [Au07]
Atunci când bobina magnetică este alimentată electric particulele magnetice se aliniază
în lungul liniilor de câmp magnetic. În apropierea pistonului se formează lanțuri lungi de
particule metalice care sunt dispuse transversal curgerii lichidului prin orificiul pistonului.
Datorită acestei dispuneri, lanțurile de particule opun rezistență mare cursei pistonului și drept
urmare forța de amortizare este mare.
Construcția amortizorul magneto-reologic este mult mai simplă decât cea a unui
amortizor clasic. Valvele complexe care erau folosite la amortizorul clasic nu mai sunt
necesare, ele sunt înlocuite de canale simple care trec prin pistonul amortizorului unde este
situată bobina magnetică generatoare de câmp.
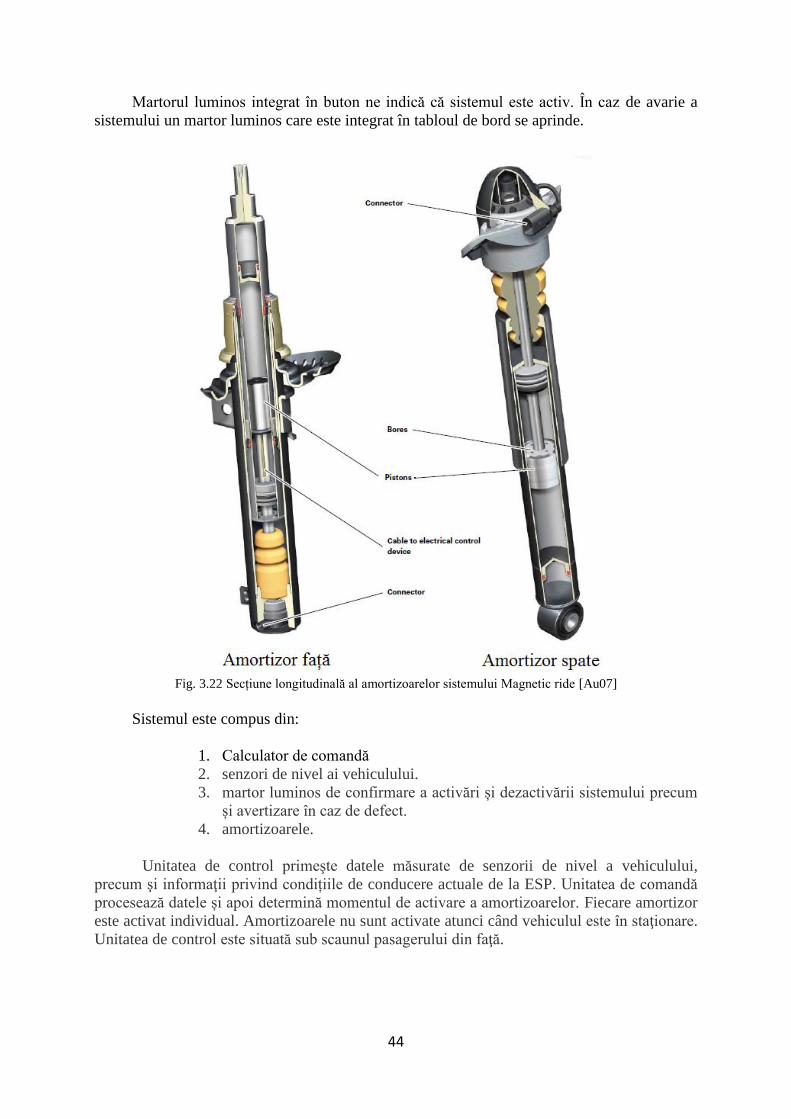
În mod normal sistemul lucrează în setarea de "confort" al amortizoarelor, setarea
"sport" poate fi activată prin apăsarea butonului de comandă de pe consola centrală.
Fig. 3.21 Butonul de comandă și martorul de avarie a sistemului Magnetic ride [Au07]
44
Martorul luminos integrat în buton ne indică că sistemul este activ. În caz de avarie a
sistemului un martor luminos care este integrat în tabloul de bord se aprinde.
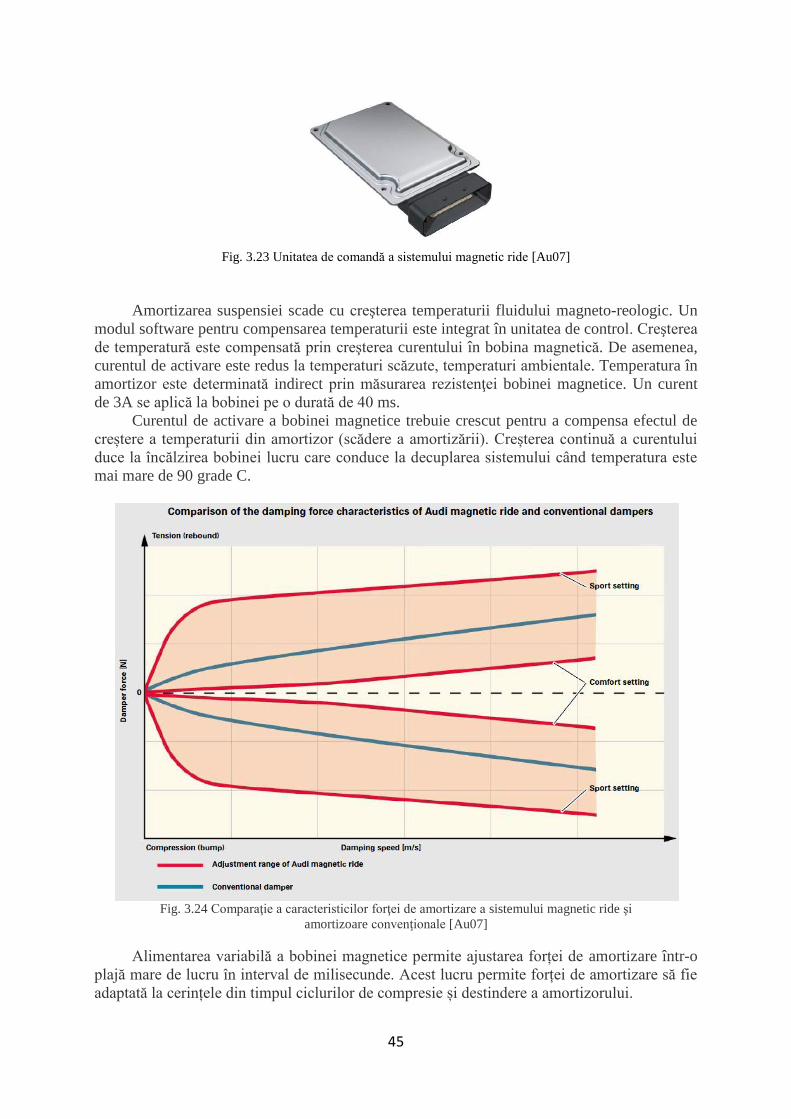
Fig. 3.22 Secțiune longitudinală al amortizoarelor sistemului Magnetic ride [Au07]
Sistemul este compus din:
1. Calculator de comandă
2. senzori de nivel ai vehiculului.
3. martor luminos de confirmare a activări și dezactivării sistemului precum
și avertizare în caz de defect.
4. amortizoarele.
Unitatea de control primeşte datele măsurate de senzorii de nivel a vehiculului,
precum şi informaţii privind condițiile de conducere actuale de la ESP. Unitatea de comandă
procesează datele și apoi determină momentul de activare a amortizoarelor. Fiecare amortizor
este activat individual. Amortizoarele nu sunt activate atunci când vehiculul este în staţionare.
Unitatea de control este situată sub scaunul pasagerului din faţă.
45
Fig. 3.23 Unitatea de comandă a sistemului magnetic ride [Au07]
Amortizarea suspensiei scade cu creşterea temperaturii fluidului magneto-reologic. Un
modul software pentru compensarea temperaturii este integrat în unitatea de control. Creşterea
de temperatură este compensată prin creşterea curentului în bobina magnetică. De asemenea,
curentul de activare este redus la temperaturi scăzute, temperaturi ambientale. Temperatura în
amortizor este determinată indirect prin măsurarea rezistenţei bobinei magnetice. Un curent
de 3A se aplică la bobinei pe o durată de 40 ms.
Curentul de activare a bobinei magnetice trebuie crescut pentru a compensa efectul de
creștere a temperaturii din amortizor (scădere a amortizării). Creșterea continuă a curentului
duce la încălzirea bobinei lucru care conduce la decuplarea sistemului când temperatura este
mai mare de 90 grade C.
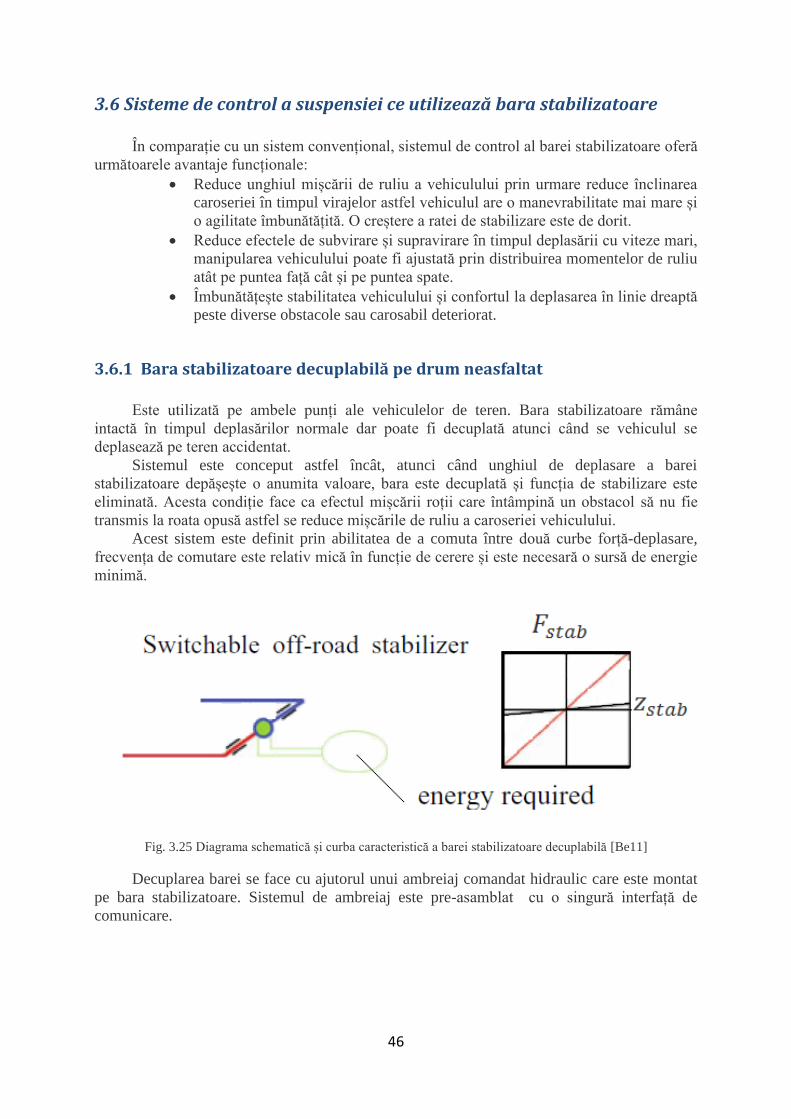
Fig. 3.24 Comparaţie a caracteristicilor forţei de amortizare a sistemului magnetic ride şi
amortizoare convenţionale [Au07]
Alimentarea variabilă a bobinei magnetice permite ajustarea forței de amortizare într-o
plajă mare de lucru în interval de milisecunde. Acest lucru permite forței de amortizare să fie
adaptată la cerințele din timpul ciclurilor de compresie și destindere a amortizorului.
46
3.6 Sisteme de control a suspensiei ce utilizează bara stabilizatoare
În comparație cu un sistem convențional, sistemul de control al barei stabilizatoare oferă
următoarele avantaje funcționale:
Reduce unghiul mișcării de ruliu a vehiculului prin urmare reduce înclinarea
caroseriei în timpul virajelor astfel vehiculul are o manevrabilitate mai mare și
o agilitate îmbunătățită. O creștere a ratei de stabilizare este de dorit.
Reduce efectele de subvirare și supravirare în timpul deplasării cu viteze mari,
manipularea vehiculului poate fi ajustată prin distribuirea momentelor de ruliu
atât pe puntea față cât și pe puntea spate.
Îmbunătățește stabilitatea vehiculului și confortul la deplasarea în linie dreaptă
peste diverse obstacole sau carosabil deteriorat.
3.6.1 Bara stabilizatoare decuplabilă pe drum neasfaltat
Este utilizată pe ambele punți ale vehiculelor de teren. Bara stabilizatoare rămâne
intactă în timpul deplasărilor normale dar poate fi decuplată atunci când se vehiculul se
deplasează pe teren accidentat.
Sistemul este conceput astfel încât, atunci când unghiul de deplasare a barei
stabilizatoare depășește o anumita valoare, bara este decuplată și funcția de stabilizare este
eliminată. Acesta condiție face ca efectul mișcării roții care întâmpină un obstacol să nu fie
transmis la roata opusă astfel se reduce mișcările de ruliu a caroseriei vehiculului.
Acest sistem este definit prin abilitatea de a comuta între două curbe forță-deplasare,
frecvența de comutare este relativ mică în funcție de cerere și este necesară o sursă de energie
minimă.
Fig. 3.25 Diagrama schematică și curba caracteristică a barei stabilizatoare decuplabilă [Be11]
Decuplarea barei se face cu ajutorul unui ambreiaj comandat hidraulic care este montat
pe bara stabilizatoare. Sistemul de ambreiaj este pre-asamblat cu o singură interfață de
comunicare.

47
Fig. 3.26 Mecanismul de comandă și ambreiaj a barei stabilitoare [Be11]
Unitatea electronică și hidraulică a sistemului este compusă dintr-o pompă acționată de
un motor electric, un bloc de valve, un senzor de presiune, un element de fixare a barei de
șasiu și circuite electronice ce comunică cu unitatea de comandă. Sistemul este conectat la
rețeaua globală a vehiculului.
3.6.2 Bara stabilizatoare cu acţiune în două trepte
Sistemul de control a barei stabilizatoare are două trepte de funcționare, modul de bază
care oferă barei un moment de torsiune mic ceea ce ajută a îmbunătății confortul în timpul
călătoriei și modul ferm care pentru siguranță și manipulare stabilizatorului ii se mărește
momentul de torsiune atunci când o anumită valoare a accelerației laterale este depășită în
timpul virajelor.
Acest sistem este capabil de a comuta între două curbe forță-deplasare, curbele sunt
alese în funcție de condițiile de conducere și este necesară o sursă de energie minimă.
Fig. 3.25 Diagrama schematică și curba caracteristică a barei stabilizatoare cu
acțiune în două trepte [Be11]
Funcționarea acestui sistem este asemănătoare cu sistemul de bară stabilizatoare
decuplabilă, în funcție de construcție aceste două sisteme pot fi montate împreună.
3.6.3 Bara stabilizatoare semi-activă
Barele stabilizatoare semi-active pot oferi caracteristici de arc ajustabile și se comportă
ca un amortizor a mișcării de ruliu a vehiculului. Prin reducerea mișcării de ruliu se
îmbunătățește confortul ocupanților iar prin eliminarea vârfurilor de rezonanță se garantează
siguranța.
48
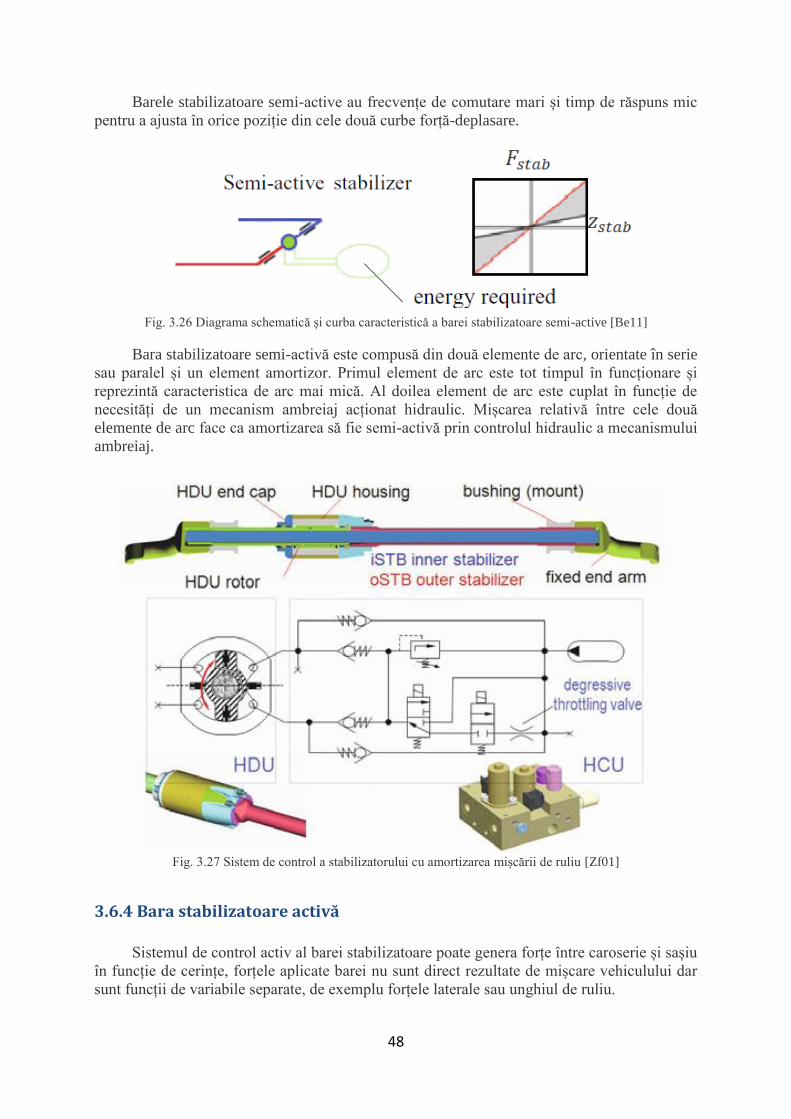
Barele stabilizatoare semi-active au frecvențe de comutare mari și timp de răspuns mic
pentru a ajusta în orice poziție din cele două curbe forță-deplasare.
Fig. 3.26 Diagrama schematică și curba caracteristică a barei stabilizatoare semi-active [Be11]
Bara stabilizatoare semi-activă este compusă din două elemente de arc, orientate în serie
sau paralel și un element amortizor. Primul element de arc este tot timpul în funcționare și
reprezintă caracteristica de arc mai mică. Al doilea element de arc este cuplat în funcție de
necesități de un mecanism ambreiaj acționat hidraulic. Mișcarea relativă între cele două
elemente de arc face ca amortizarea să fie semi-activă prin controlul hidraulic a mecanismului
ambreiaj.
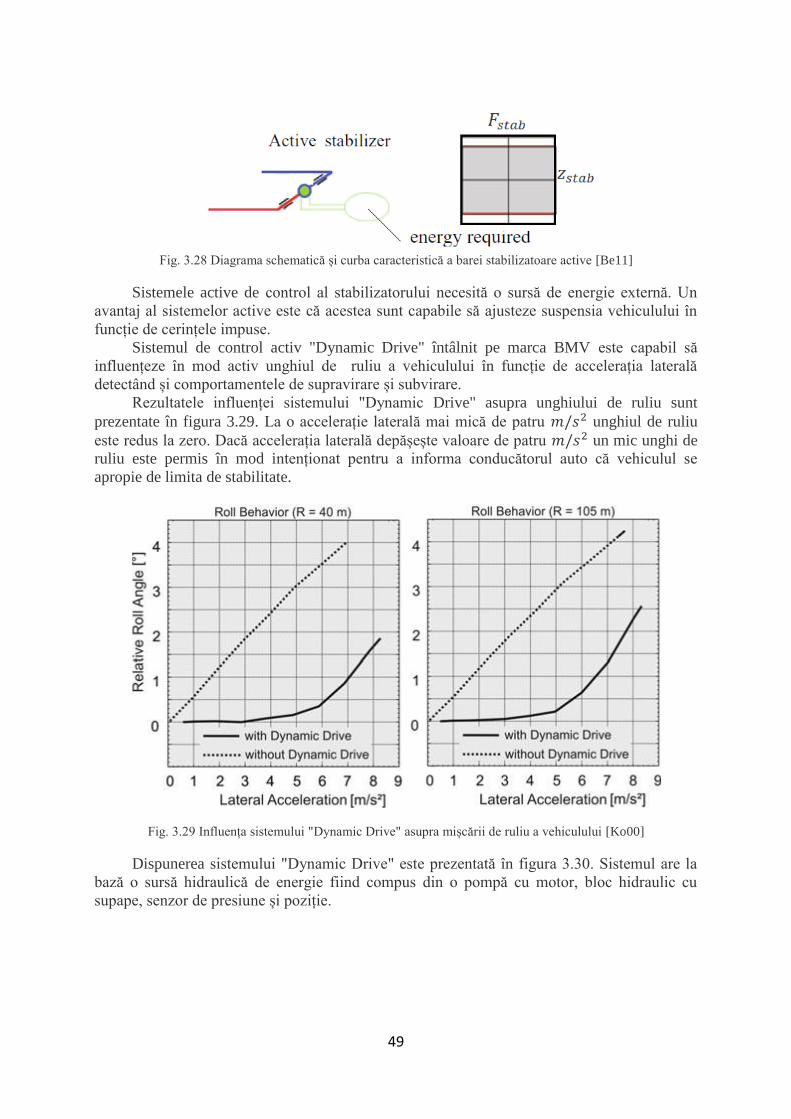
Fig. 3.27 Sistem de control a stabilizatorului cu amortizarea mișcării de ruliu [Zf01]
3.6.4 Bara stabilizatoare activă
Sistemul de control activ al barei stabilizatoare poate genera forțe între caroserie și sașiu
în funcție de cerințe, forțele aplicate barei nu sunt direct rezultate de mișcare vehiculului dar
sunt funcții de variabile separate, de exemplu forțele laterale sau unghiul de ruliu.
49
Fig. 3.28 Diagrama schematică și curba caracteristică a barei stabilizatoare active [Be11]
Sistemele active de control al stabilizatorului necesită o sursă de energie externă. Un
avantaj al sistemelor active este că acestea sunt capabile să ajusteze suspensia vehiculului în
funcție de cerințele impuse.
Sistemul de control activ "Dynamic Drive" întâlnit pe marca BMV este capabil să
influențeze în mod activ unghiul de ruliu a vehiculului în funcție de accelerația laterală
detectând și comportamentele de supravirare și subvirare.
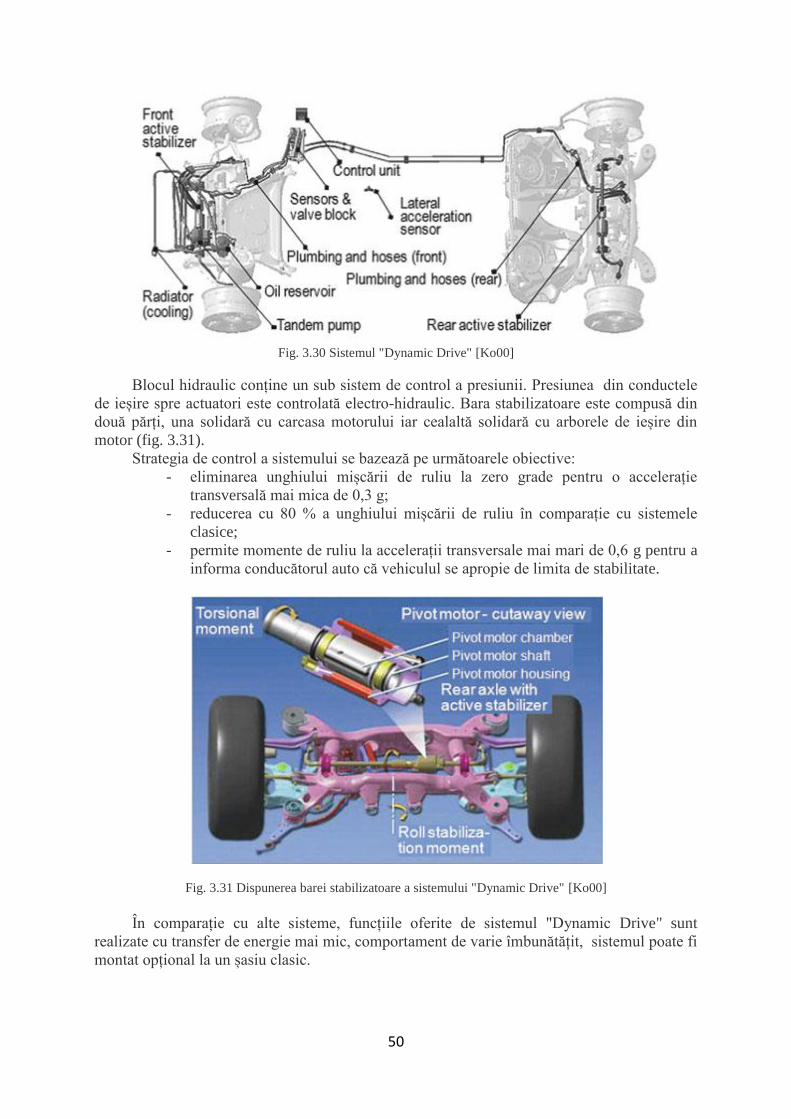
Rezultatele influenței sistemului "Dynamic Drive" asupra unghiului de ruliu sunt
prezentate în figura 3.29. La o accelerație laterală mai mică de patru unghiul de ruliu
este redus la zero. Dacă accelerația laterală depășește valoare de patru un mic unghi de
ruliu este permis în mod intenționat pentru a informa conducătorul auto că vehiculul se
apropie de limita de stabilitate.
Fig. 3.29 Influența sistemului "Dynamic Drive" asupra mișcării de ruliu a vehiculului [Ko00]
Dispunerea sistemului "Dynamic Drive" este prezentată în figura 3.30. Sistemul are la
bază o sursă hidraulică de energie fiind compus din o pompă cu motor, bloc hidraulic cu
supape, senzor de presiune și poziție.
50
Fig. 3.30 Sistemul "Dynamic Drive" [Ko00]
Blocul hidraulic conține un sub sistem de control a presiunii. Presiunea din conductele
de ieșire spre actuatori este controlată electro-hidraulic. Bara stabilizatoare este compusă din
două părți, una solidară cu carcasa motorului iar cealaltă solidară cu arborele de ieșire din
motor (fig. 3.31).
Strategia de control a sistemului se bazează pe următoarele obiective:
- eliminarea unghiului mișcării de ruliu la zero grade pentru o accelerație
transversală mai mica de 0,3 g;
- reducerea cu 80 % a unghiului mișcării de ruliu în comparație cu sistemele
clasice;
- permite momente de ruliu la accelerații transversale mai mari de 0,6 g pentru a
informa conducătorul auto că vehiculul se apropie de limita de stabilitate.
Fig. 3.31 Dispunerea barei stabilizatoare a sistemului "Dynamic Drive" [Ko00]
În comparație cu alte sisteme, funcțiile oferite de sistemul "Dynamic Drive" sunt
realizate cu transfer de energie mai mic, comportament de varie îmbunătățit, sistemul poate fi
montat opțional la un șasiu clasic.
51
IV. STADIUL ACTUAL AL CERCETĂRILOR PRIVIND SISTEMELE DE CONTROL A SUSPENSIEI AUTOVEHICULELOR FOLOSIND AMORTIZORUL MAGNETO-REOLOGIC
4.1 Introducere
Materialele magneto şi electro-reologice fac parte din clasa mai largă a materialelor așa-
zis inteligente sau adaptive care reacţionează la modificarea controlată a unor stimuli externi
ca temperatura, presiunea, tensiunea electrică sau alţi parametri fizici, prin modificarea
proprietăţilor reologice.
Materialele magnetoreologice(MR) sunt suspensii coloidale omogene de particule
magnetizabile, ultrafine, micrometrice, plasate într-o matrice. De aici provine şi o variantă de
clasificare. în funcţie de natura matricei avem o matrice fluidică (apă, glicoli, hidrocarbon,
uleiuri minerale sau uleiuri sintetice pe bază de silicon) sau o matrice vâsco-elastică din
polimeri (cauciuc natural sau polimeri siliconici). în aplicaţiile din mecanică se preferă, ca
material cu rol de matrice, uleiurile şi polimerii siliconici.
Ca particule magnetizabile, cele mai utilizate sunt microparticulele de Fe. Pentru
evitarea efectelor de aglomerare şi sedimentare gravitaţională se folosesc aditivi care asigură
o peliculă în jurul particulelor. La aditivi moderni apare şi un efect de respingere electrostatică
care micşorează şi mai mult tendinţa de sedimentare şi aglomerare. Se mai adaugă aditivi,
care micşorează efectul abraziv, şi antioxidanţi. Oxidarea reprezintă un factor major de
degradare pentru acest tip de material.
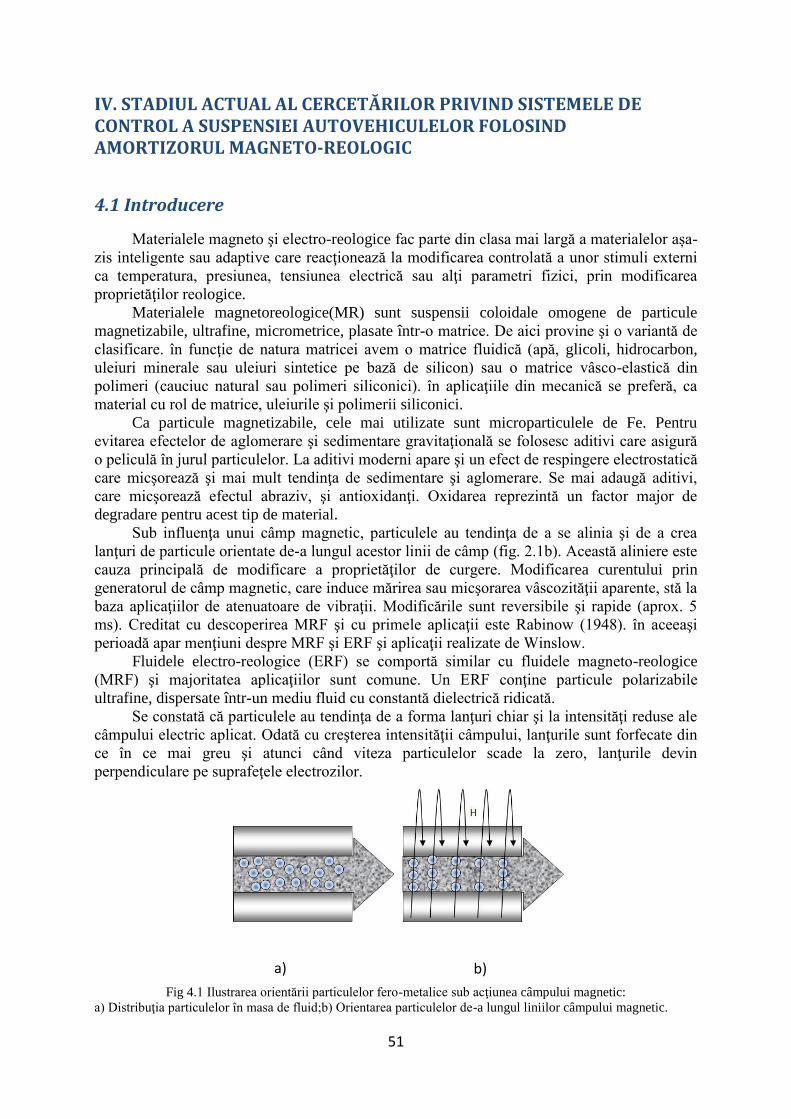
Sub influenţa unui câmp magnetic, particulele au tendinţa de a se alinia şi de a crea
lanţuri de particule orientate de-a lungul acestor linii de câmp (fig. 2.1b). Această aliniere este
cauza principală de modificare a proprietăţilor de curgere. Modificarea curentului prin
generatorul de câmp magnetic, care induce mărirea sau micşorarea vâscozităţii aparente, stă la
baza aplicaţiilor de atenuatoare de vibraţii. Modificările sunt reversibile şi rapide (aprox. 5
ms). Creditat cu descoperirea MRF şi cu primele aplicaţii este Rabinow (1948). în aceeaşi
perioadă apar menţiuni despre MRF şi ERF şi aplicaţii realizate de Winslow.
Fluidele electro-reologice (ERF) se comportă similar cu fluidele magneto-reologice
(MRF) şi majoritatea aplicaţiilor sunt comune. Un ERF conţine particule polarizabile
ultrafine, dispersate într-un mediu fluid cu constantă dielectrică ridicată.
Se constată că particulele au tendinţa de a forma lanţuri chiar şi la intensităţi reduse ale
câmpului electric aplicat. Odată cu creşterea intensităţii câmpului, lanţurile sunt forfecate din
ce în ce mai greu şi atunci când viteza particulelor scade la zero, lanţurile devin
perpendiculare pe suprafeţele electrozilor.
Fig 4.1 Ilustrarea orientării particulelor fero-metalice sub acţiunea câmpului magnetic:
a) Distribuţia particulelor în masa de fluid;b) Orientarea particulelor de-a lungul liniilor câmpului magnetic.
a) b)
52
Creşterea vâscozităţii, cu până la trei ordine de mărime, este datorată energiei
consumate pentru disocierea lanţurilor de particule. Reluarea curgerii are loc numai atunci
când tensiunea de forfecare aplicată depăşeşte tensiunea de curgere dinamică. Din acel
moment, în continuare, materialul ER se comportă ca un fluid obişnuit, cu vâscozitate
constantă. Aşadar, materialele ER au comportamente diferite: în regim pre-curgere şi în regim
post-curgere. Majoritatea aplicaţiilor sunt pentru materiale ER, cu comportare la forfecare
controlabilă, în regim post-curgere.
4.2 Stadiul actual al cercetărilor privind sistemele de control a suspensiei autovehiculelor folosind materiale magneto-reologice
Efectele mici electro-reologice au fost de mult timp cunoscute, dar efectele pe scară
largă cu posibile aplicații în practică au fost studiate începând cu anul 1947 de W. M.
Winslow. Primele cercetări importante asupra amortizoarelor magneto-reologice sunt atribuite
lui Rabinow în 1951. De patruzeci de ani, eforturi semnificative au fost făcute asupra
amortizoarelor electro-reologice (ER), neglijând pe scară larg amortizoarele magneto-
reologice (MR), dar începând din 1990 când cercetările au luat amploare asupra MR, s-a
dovedit că acestea sunt mult mai practice din cauza că folosesc tensiunii de operare mai mici,
necesar de putere mai mică, au randament mai mare la forfecare, rezistă la temperaturi mai
ridicate, şi au toleranţă mai mare la lichidele de contaminare, în special la apă.
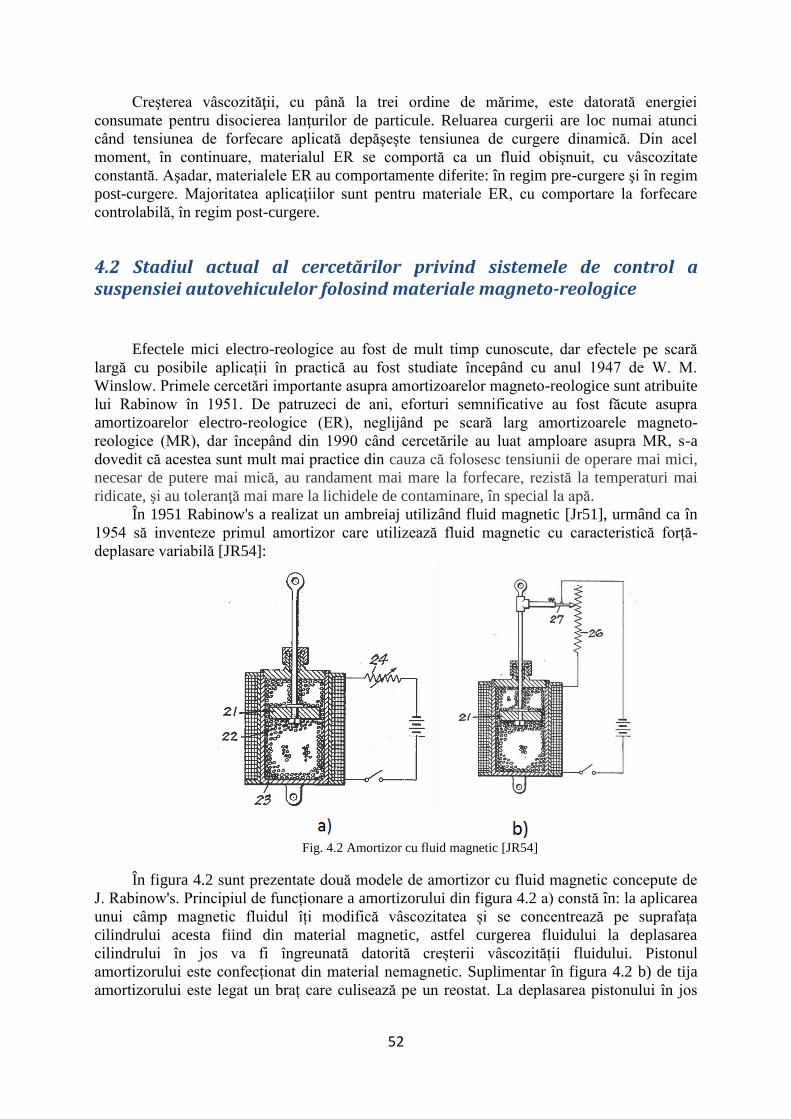
În 1951 Rabinow's a realizat un ambreiaj utilizând fluid magnetic [Jr51], urmând ca în
1954 să inventeze primul amortizor care utilizează fluid magnetic cu caracteristică forță-
deplasare variabilă [JR54]:
Fig. 4.2 Amortizor cu fluid magnetic [JR54]
În figura 4.2 sunt prezentate două modele de amortizor cu fluid magnetic concepute de
J. Rabinow's. Principiul de funcționare a amortizorului din figura 4.2 a) constă în: la aplicarea
unui câmp magnetic fluidul îți modifică vâscozitatea și se concentrează pe suprafața
cilindrului acesta fiind din material magnetic, astfel curgerea fluidului la deplasarea
cilindrului în jos va fi îngreunată datorită creșterii vâscozității fluidului. Pistonul
amortizorului este confecționat din material nemagnetic. Suplimentar în figura 4.2 b) de tija
amortizorului este legat un braț care culisează pe un reostat. La deplasarea pistonului în jos
53
rezistența reostatului scade, fapt ce duce la creșterea curentului, crește câmpul magnetic iar
pistonul va întâmpina o rezistență mai mare la deplasare.
Amortizoarele magneto-reologice sunt optimizate. Relaţiilor dimensionale implicate în
fluxul magnetic sunt legate de un raport de parametrii de funcţionare a densităţii fluxului
magnetic în lichidul la densitatea de flux din oţel.
O supapă magnetică este utilizată pentru a modifica parametrii fluxului de fluid MR şi,
prin urmare, caracteristicile operaţionale ale amortizorului.
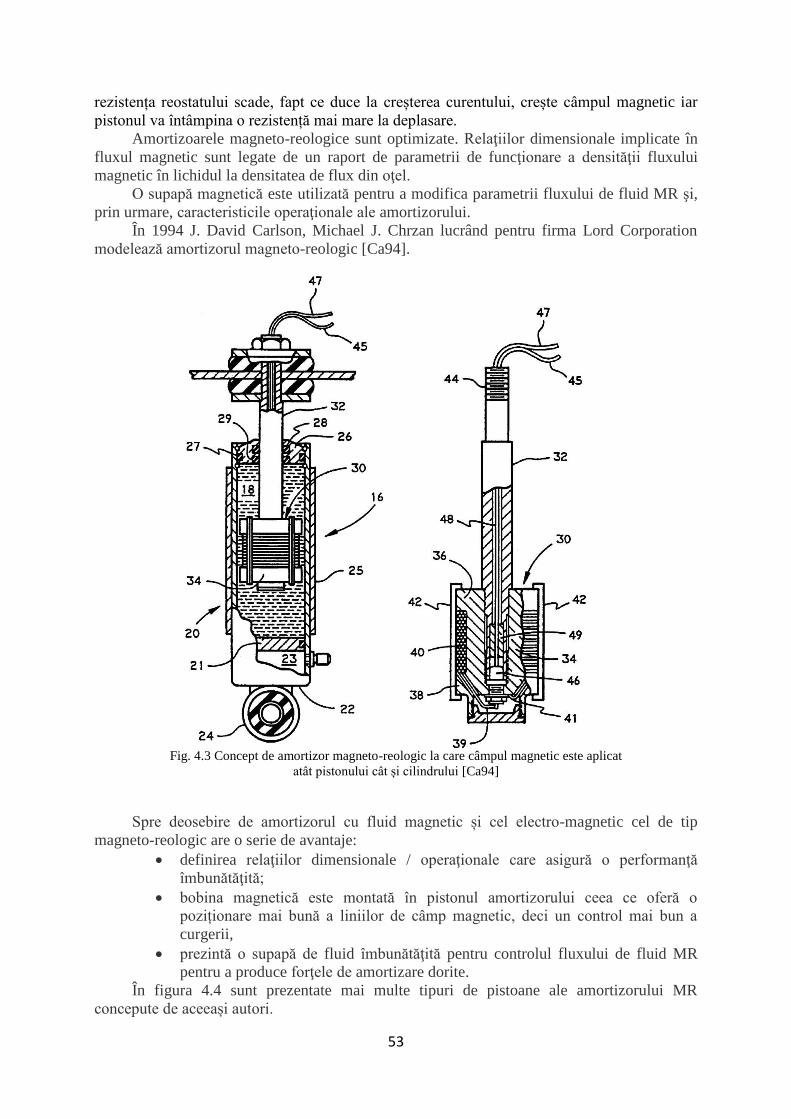
În 1994 J. David Carlson, Michael J. Chrzan lucrând pentru firma Lord Corporation
modelează amortizorul magneto-reologic [Ca94].
Fig. 4.3 Concept de amortizor magneto-reologic la care câmpul magnetic este aplicat
atât pistonului cât și cilindrului [Ca94]
Spre deosebire de amortizorul cu fluid magnetic și cel electro-magnetic cel de tip
magneto-reologic are o serie de avantaje:
definirea relaţiilor dimensionale / operaţionale care asigură o performanţă
îmbunătăţită;
bobina magnetică este montată în pistonul amortizorului ceea ce oferă o
poziționare mai bună a liniilor de câmp magnetic, deci un control mai bun a
curgerii,
prezintă o supapă de fluid îmbunătăţită pentru controlul fluxului de fluid MR
pentru a produce forţele de amortizare dorite.
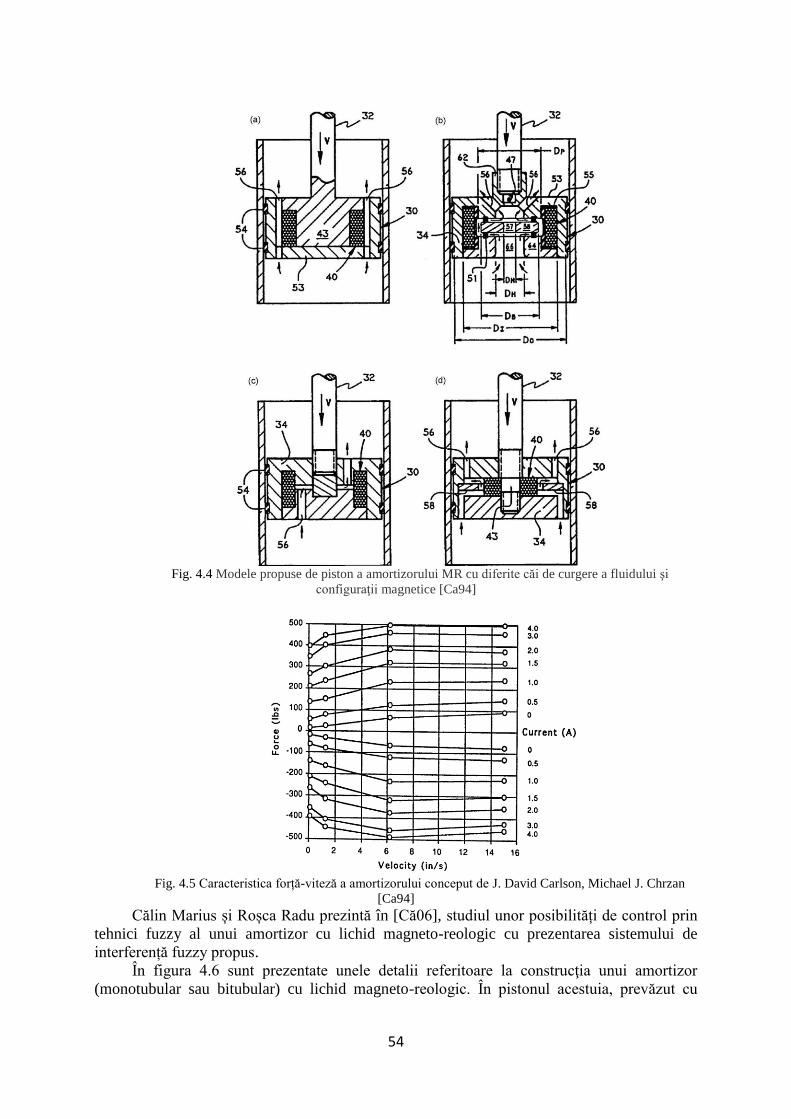
În figura 4.4 sunt prezentate mai multe tipuri de pistoane ale amortizorului MR
concepute de aceeași autori.
54
Fig. 4.4 Modele propuse de piston a amortizorului MR cu diferite căi de curgere a fluidului şi
configuraţii magnetice [Ca94]
Fig. 4.5 Caracteristica forță-viteză a amortizorului conceput de J. David Carlson, Michael J. Chrzan
[Ca94]
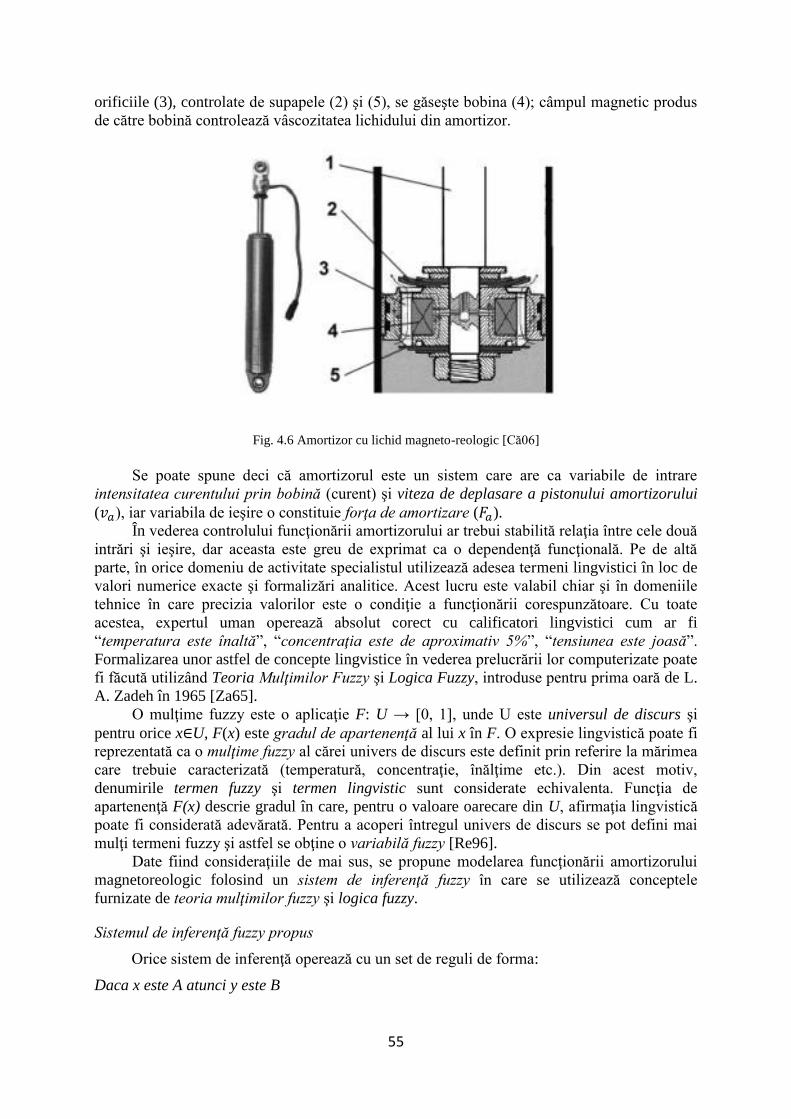
Călin Marius și Roșca Radu prezintă în [Că06], studiul unor posibilități de control prin
tehnici fuzzy al unui amortizor cu lichid magneto-reologic cu prezentarea sistemului de
interferență fuzzy propus.
În figura 4.6 sunt prezentate unele detalii referitoare la construcţia unui amortizor
(monotubular sau bitubular) cu lichid magneto-reologic. În pistonul acestuia, prevăzut cu
55
orificiile (3), controlate de supapele (2) şi (5), se găseşte bobina (4); câmpul magnetic produs
de către bobină controlează vâscozitatea lichidului din amortizor.
Fig. 4.6 Amortizor cu lichid magneto-reologic [Că06]
Se poate spune deci că amortizorul este un sistem care are ca variabile de intrare
intensitatea curentului prin bobină (curent) şi viteza de deplasare a pistonului amortizorului
( ), iar variabila de ieşire o constituie forţa de amortizare ( ).
În vederea controlului funcţionării amortizorului ar trebui stabilită relaţia între cele două
intrări şi ieşire, dar aceasta este greu de exprimat ca o dependenţă funcţională. Pe de altă
parte, în orice domeniu de activitate specialistul utilizează adesea termeni lingvistici în loc de
valori numerice exacte şi formalizări analitice. Acest lucru este valabil chiar şi în domeniile
tehnice în care precizia valorilor este o condiţie a funcţionării corespunzătoare. Cu toate
acestea, expertul uman operează absolut corect cu calificatori lingvistici cum ar fi
“temperatura este înaltă”, “concentraţia este de aproximativ 5%”, “tensiunea este joasă”.
Formalizarea unor astfel de concepte lingvistice în vederea prelucrării lor computerizate poate
fi făcută utilizând Teoria Mulţimilor Fuzzy şi Logica Fuzzy, introduse pentru prima oară de L.
A. Zadeh în 1965 [Za65].
O mulţime fuzzy este o aplicaţie F: U → [0, 1], unde U este universul de discurs şi
pentru orice x∈U, F(x) este gradul de apartenenţă al lui x în F. O expresie lingvistică poate fi
reprezentată ca o mulţime fuzzy al cărei univers de discurs este definit prin referire la mărimea
care trebuie caracterizată (temperatură, concentraţie, înălţime etc.). Din acest motiv,
denumirile termen fuzzy şi termen lingvistic sunt considerate echivalenta. Funcţia de
apartenenţă F(x) descrie gradul în care, pentru o valoare oarecare din U, afirmaţia lingvistică
poate fi considerată adevărată. Pentru a acoperi întregul univers de discurs se pot defini mai
mulţi termeni fuzzy şi astfel se obţine o variabilă fuzzy [Re96].
Date fiind consideraţiile de mai sus, se propune modelarea funcţionării amortizorului
magnetoreologic folosind un sistem de inferenţă fuzzy în care se utilizează conceptele
furnizate de teoria mulţimilor fuzzy şi logica fuzzy.
Sistemul de inferenţă fuzzy propus
Orice sistem de inferenţă operează cu un set de reguli de forma:
Daca x este A atunci y este B
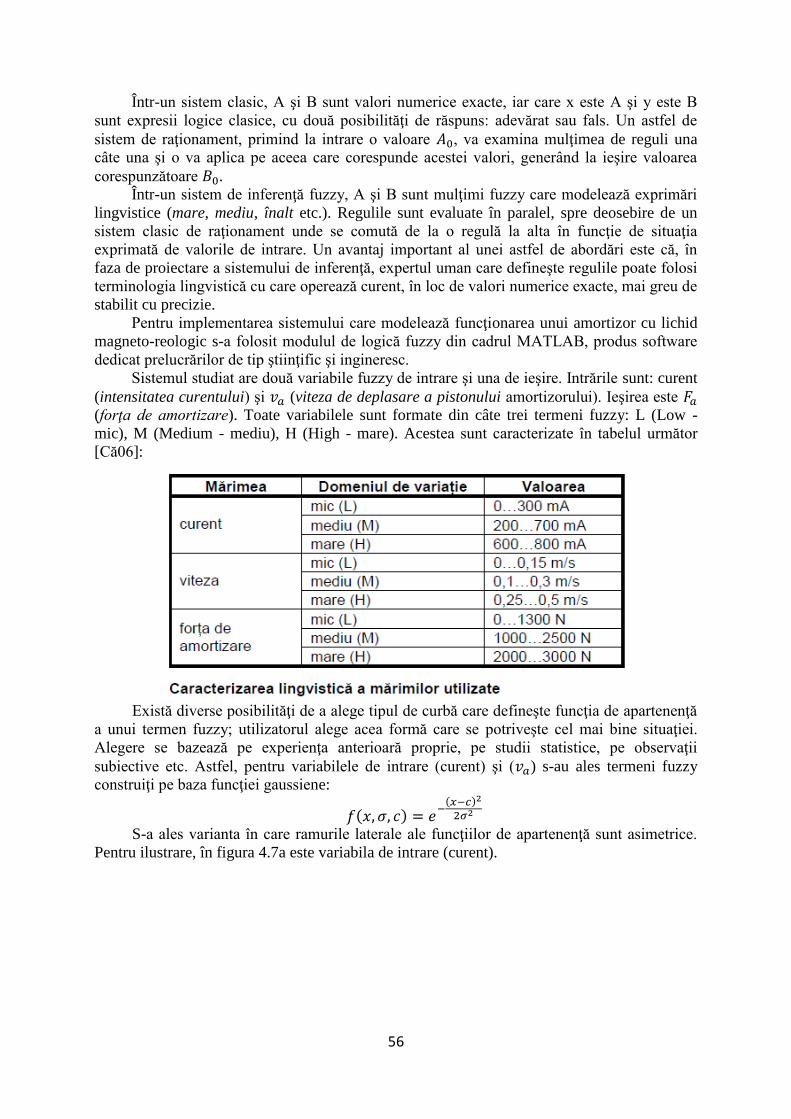
56
Într-un sistem clasic, A şi B sunt valori numerice exacte, iar care x este A şi y este B
sunt expresii logice clasice, cu două posibilităţi de răspuns: adevărat sau fals. Un astfel de
sistem de raţionament, primind la intrare o valoare , va examina mulţimea de reguli una
câte una şi o va aplica pe aceea care corespunde acestei valori, generând la ieşire valoarea
corespunzătoare .
Într-un sistem de inferenţă fuzzy, A şi B sunt mulţimi fuzzy care modelează exprimări
lingvistice (mare, mediu, înalt etc.). Regulile sunt evaluate în paralel, spre deosebire de un
sistem clasic de raţionament unde se comută de la o regulă la alta în funcţie de situaţia
exprimată de valorile de intrare. Un avantaj important al unei astfel de abordări este că, în
faza de proiectare a sistemului de inferenţă, expertul uman care defineşte regulile poate folosi
terminologia lingvistică cu care operează curent, în loc de valori numerice exacte, mai greu de
stabilit cu precizie.
Pentru implementarea sistemului care modelează funcţionarea unui amortizor cu lichid
magneto-reologic s-a folosit modulul de logică fuzzy din cadrul MATLAB, produs software
dedicat prelucrărilor de tip ştiinţific şi ingineresc.
Sistemul studiat are două variabile fuzzy de intrare şi una de ieşire. Intrările sunt: curent
(intensitatea curentului) şi (viteza de deplasare a pistonului amortizorului). Ieşirea este
(forţa de amortizare). Toate variabilele sunt formate din câte trei termeni fuzzy: L (Low -
mic), M (Medium - mediu), H (High - mare). Acestea sunt caracterizate în tabelul următor
[Că06]:
Există diverse posibilităţi de a alege tipul de curbă care defineşte funcţia de apartenenţă
a unui termen fuzzy; utilizatorul alege acea formă care se potriveşte cel mai bine situaţiei.
Alegere se bazează pe experienţa anterioară proprie, pe studii statistice, pe observaţii
subiective etc. Astfel, pentru variabilele de intrare (curent) şi ( ) s-au ales termeni fuzzy
construiţi pe baza funcţiei gaussiene:
S-a ales varianta în care ramurile laterale ale funcţiilor de apartenenţă sunt asimetrice.
Pentru ilustrare, în figura 4.7a este variabila de intrare (curent).
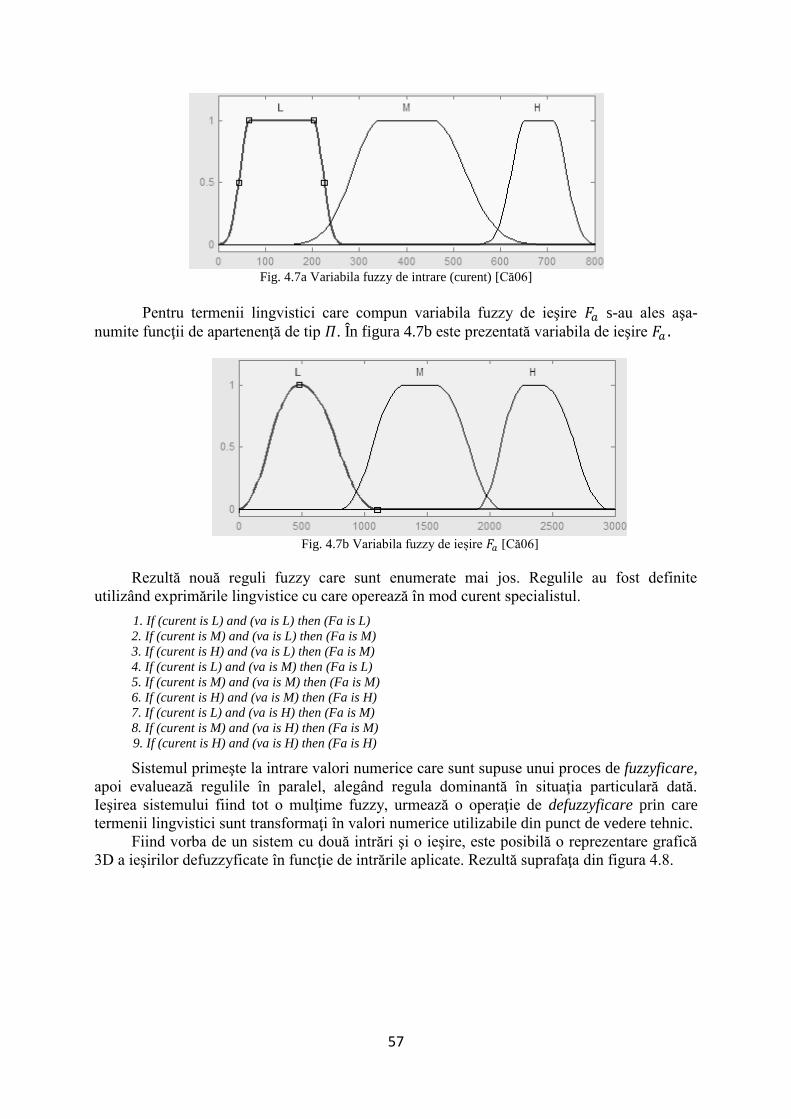
57
Fig. 4.7a Variabila fuzzy de intrare (curent) [Că06]
Pentru termenii lingvistici care compun variabila fuzzy de ieşire s-au ales aşa-
numite funcţii de apartenenţă de tip . În figura 4.7b este prezentată variabila de ieşire .
Fig. 4.7b Variabila fuzzy de ieșire [Că06]
Rezultă nouă reguli fuzzy care sunt enumerate mai jos. Regulile au fost definite
utilizând exprimările lingvistice cu care operează în mod curent specialistul.
1. If (curent is L) and (va is L) then (Fa is L)
2. If (curent is M) and (va is L) then (Fa is M)
3. If (curent is H) and (va is L) then (Fa is M)
4. If (curent is L) and (va is M) then (Fa is L)
5. If (curent is M) and (va is M) then (Fa is M)
6. If (curent is H) and (va is M) then (Fa is H)
7. If (curent is L) and (va is H) then (Fa is M)
8. If (curent is M) and (va is H) then (Fa is M)
9. If (curent is H) and (va is H) then (Fa is H)
Sistemul primeşte la intrare valori numerice care sunt supuse unui proces de fuzzyficare,
apoi evaluează regulile în paralel, alegând regula dominantă în situaţia particulară dată.
Ieşirea sistemului fiind tot o mulţime fuzzy, urmează o operaţie de defuzzyficare prin care
termenii lingvistici sunt transformaţi în valori numerice utilizabile din punct de vedere tehnic.
Fiind vorba de un sistem cu două intrări şi o ieşire, este posibilă o reprezentare grafică
3D a ieşirilor defuzzyficate în funcţie de intrările aplicate. Rezultă suprafaţa din figura 4.8.
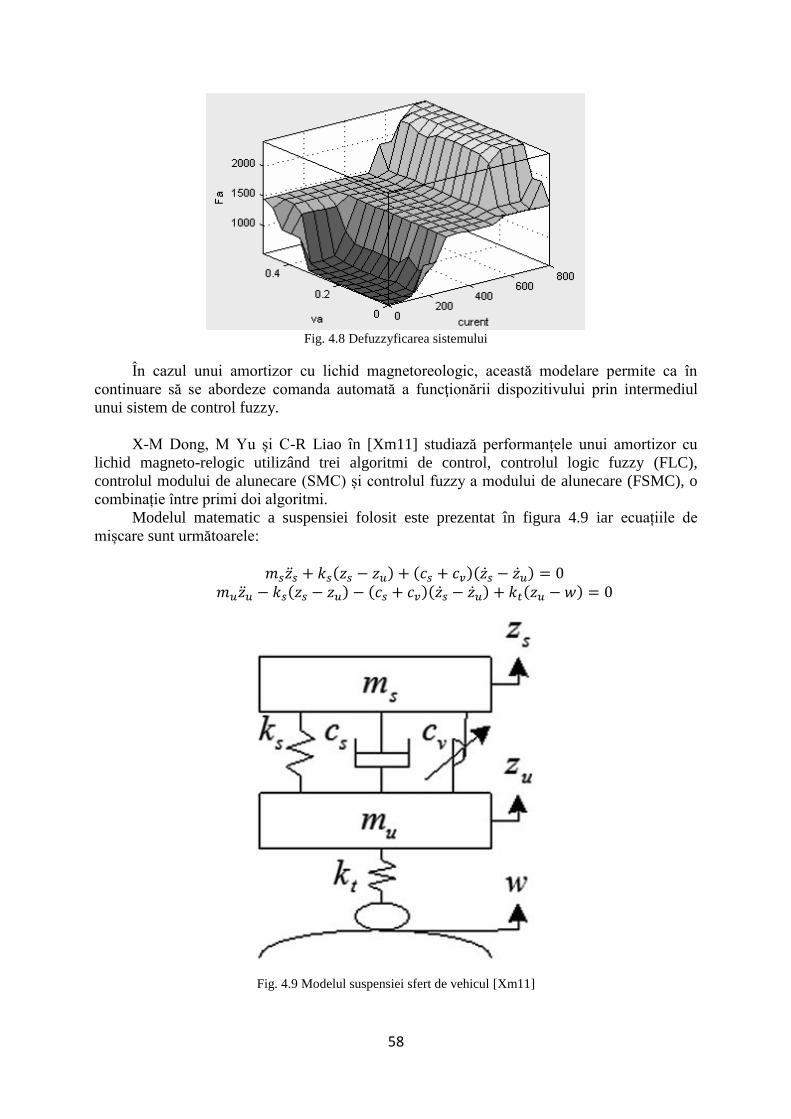
58
Fig. 4.8 Defuzzyficarea sistemului
În cazul unui amortizor cu lichid magnetoreologic, această modelare permite ca în
continuare să se abordeze comanda automată a funcţionării dispozitivului prin intermediul
unui sistem de control fuzzy.
X-M Dong, M Yu și C-R Liao în [Xm11] studiază performanțele unui amortizor cu
lichid magneto-relogic utilizând trei algoritmi de control, controlul logic fuzzy (FLC),
controlul modului de alunecare (SMC) și controlul fuzzy a modului de alunecare (FSMC), o
combinație între primi doi algoritmi.
Modelul matematic a suspensiei folosit este prezentat în figura 4.9 iar ecuațiile de
mișcare sunt următoarele:
Fig. 4.9 Modelul suspensiei sfert de vehicul [Xm11]
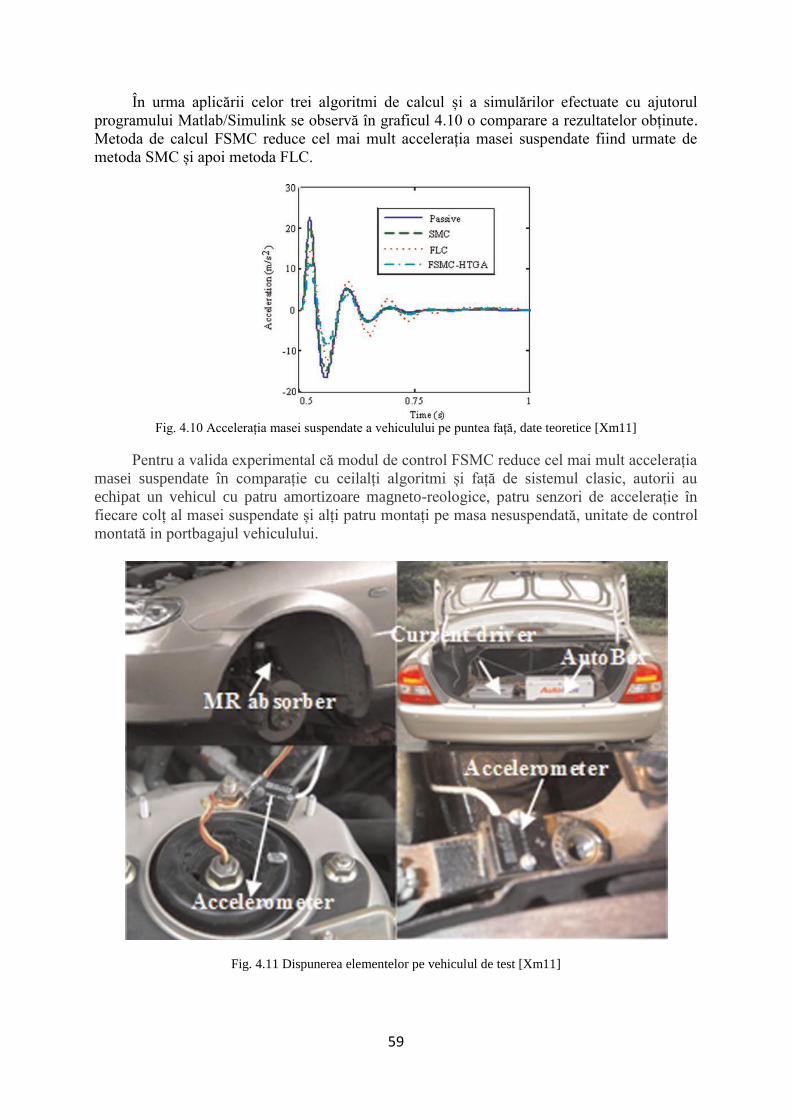
59
În urma aplicării celor trei algoritmi de calcul și a simulărilor efectuate cu ajutorul
programului Matlab/Simulink se observă în graficul 4.10 o comparare a rezultatelor obținute.
Metoda de calcul FSMC reduce cel mai mult accelerația masei suspendate fiind urmate de
metoda SMC și apoi metoda FLC.
Fig. 4.10 Accelerația masei suspendate a vehiculului pe puntea față, date teoretice [Xm11]
Pentru a valida experimental că modul de control FSMC reduce cel mai mult accelerația
masei suspendate în comparație cu ceilalți algoritmi și față de sistemul clasic, autorii au
echipat un vehicul cu patru amortizoare magneto-reologice, patru senzori de accelerație în
fiecare colț al masei suspendate și alți patru montați pe masa nesuspendată, unitate de control
montată in portbagajul vehiculului.
Fig. 4.11 Dispunerea elementelor pe vehiculul de test [Xm11]
60
Fig. 4.12 Încercarea vehiculului la denivelarea căii de rulare
Fig.4.13 Accelerația masei suspendate a vehiculului pe puntea față, date experimentale [Xm11]
Comparând rezultatele experimentale obținute în urma testului rutier prezentate în
figura 4.13 cu cele teoretice din figura 4.10 se poate observa că valorile de simulare sunt mai
mari decât cele ale testului rutier, acest lucru este datorat neglijării forțelor de frecare în partea
teoretică. Se observă de asemeni o diferență între amplitudinile accelerației verticale motivul
pentru aceasta fiind parametrii de control care mai pot fi optimizați.
Alexandru Boltoși în [Al11] folosește un amortizor magneto-reolgic tip RD -1001/4
produs de firma Lord Corporation, amortizor a cărei caracteristică forță - viteză relativă
este prezentată în figura 4.14.
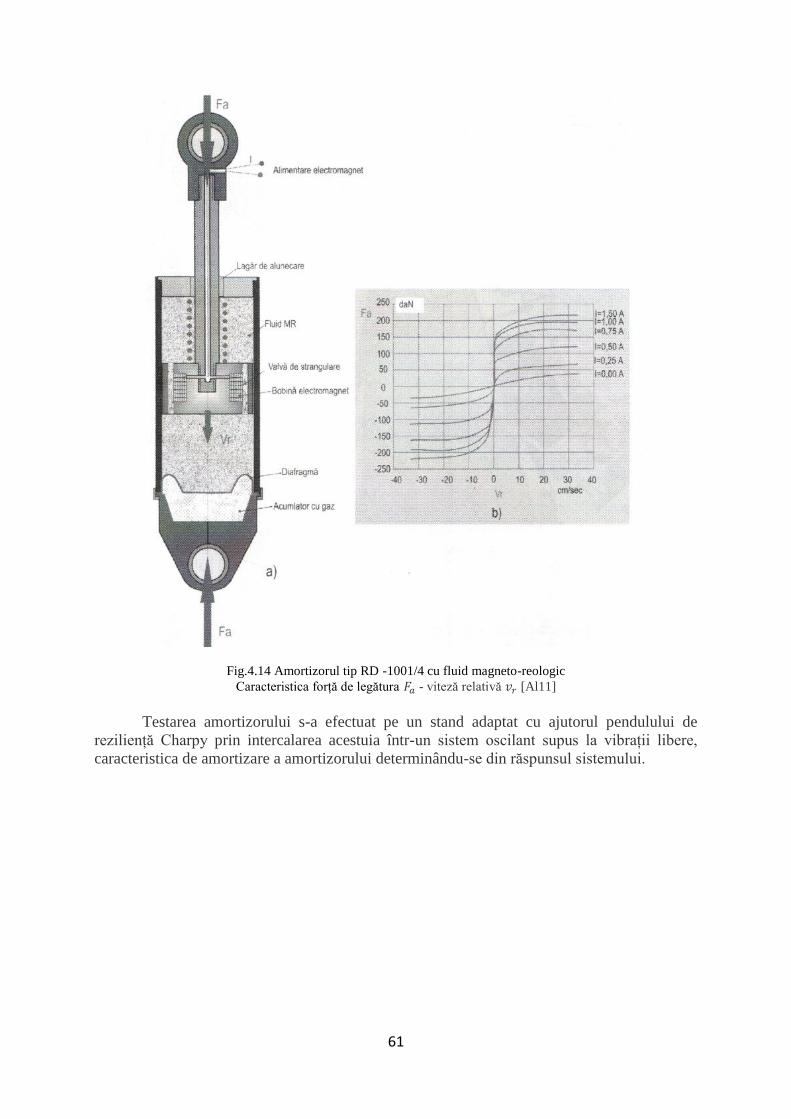
61
Fig.4.14 Amortizorul tip RD -1001/4 cu fluid magneto-reologic
Caracteristica forță de legătura - viteză relativă [Al11]
Testarea amortizorului s-a efectuat pe un stand adaptat cu ajutorul pendulului de
reziliență Charpy prin intercalarea acestuia într-un sistem oscilant supus la vibrații libere,
caracteristica de amortizare a amortizorului determinându-se din răspunsul sistemului.
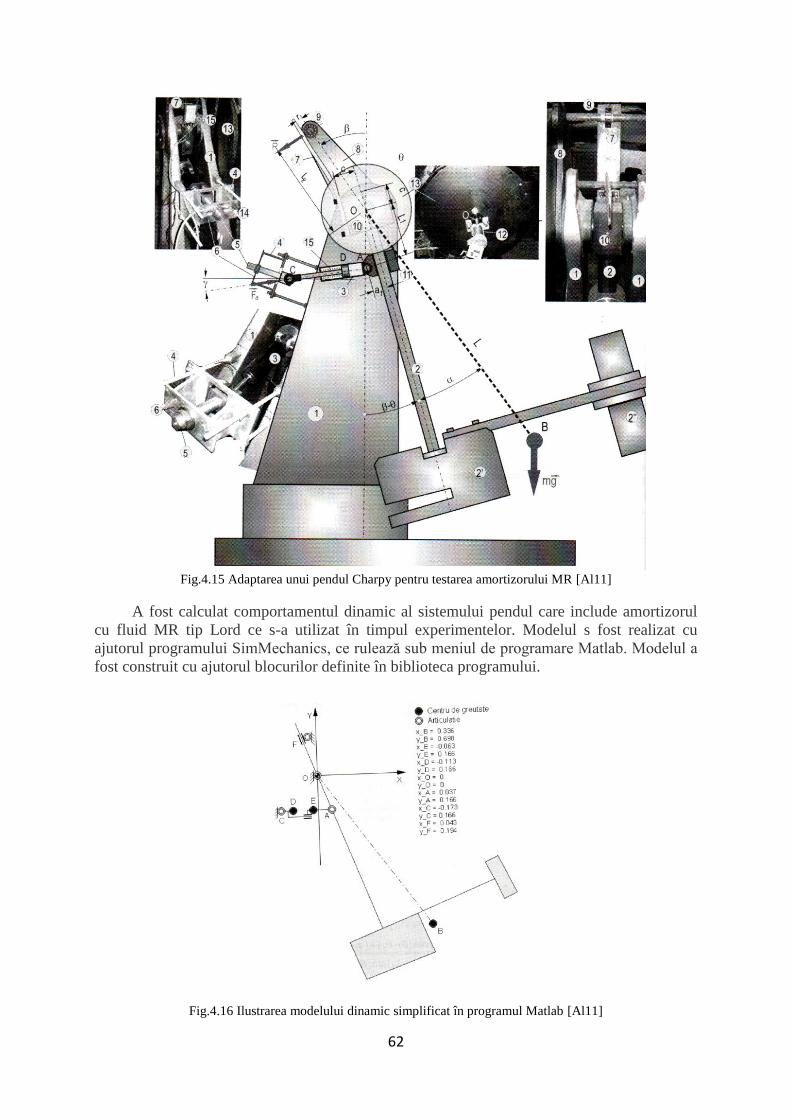
62
Fig.4.15 Adaptarea unui pendul Charpy pentru testarea amortizorului MR [Al11]
A fost calculat comportamentul dinamic al sistemului pendul care include amortizorul
cu fluid MR tip Lord ce s-a utilizat în timpul experimentelor. Modelul s fost realizat cu
ajutorul programului SimMechanics, ce rulează sub meniul de programare Matlab. Modelul a
fost construit cu ajutorul blocurilor definite în biblioteca programului.
Fig.4.16 Ilustrarea modelului dinamic simplificat în programul Matlab [Al11]
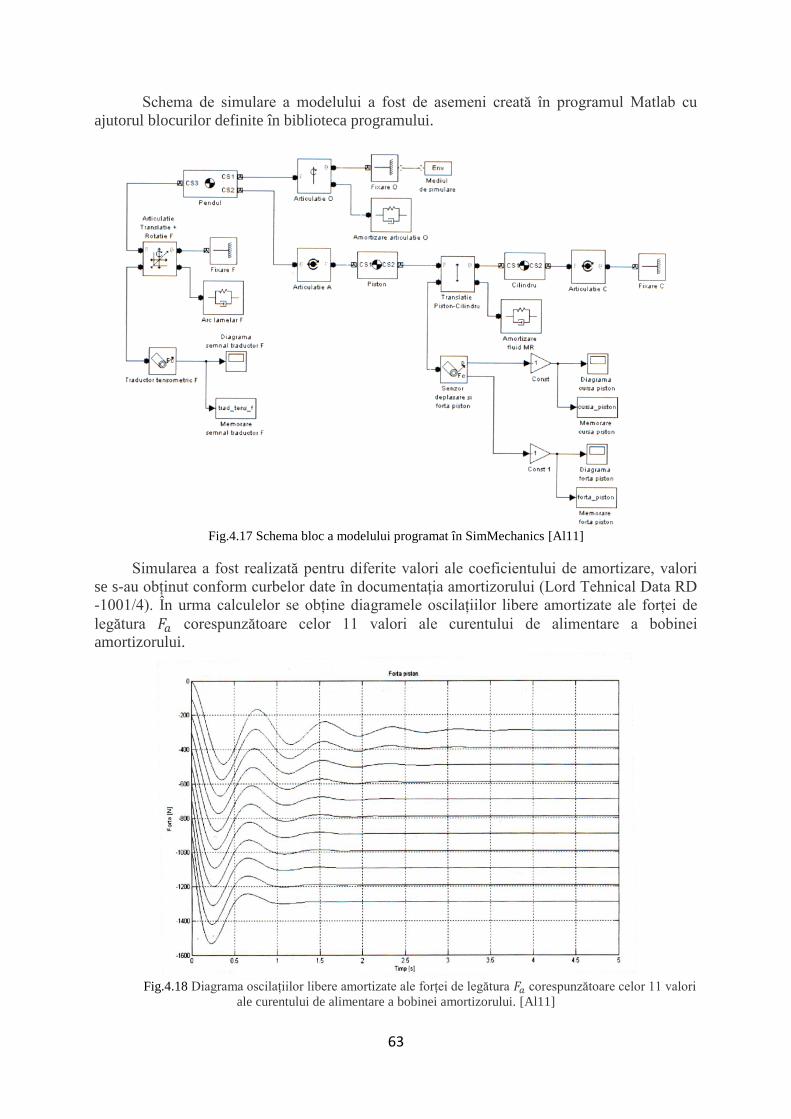
63
Schema de simulare a modelului a fost de asemeni creată în programul Matlab cu
ajutorul blocurilor definite în biblioteca programului.
Fig.4.17 Schema bloc a modelului programat în SimMechanics [Al11]
Simularea a fost realizată pentru diferite valori ale coeficientului de amortizare, valori
se s-au obținut conform curbelor date în documentația amortizorului (Lord Tehnical Data RD
-1001/4). În urma calculelor se obține diagramele oscilațiilor libere amortizate ale forței de
legătura corespunzătoare celor 11 valori ale curentului de alimentare a bobinei
amortizorului.
Fig.4.18 Diagrama oscilațiilor libere amortizate ale forței de legătura corespunzătoare celor 11 valori
ale curentului de alimentare a bobinei amortizorului. [Al11]
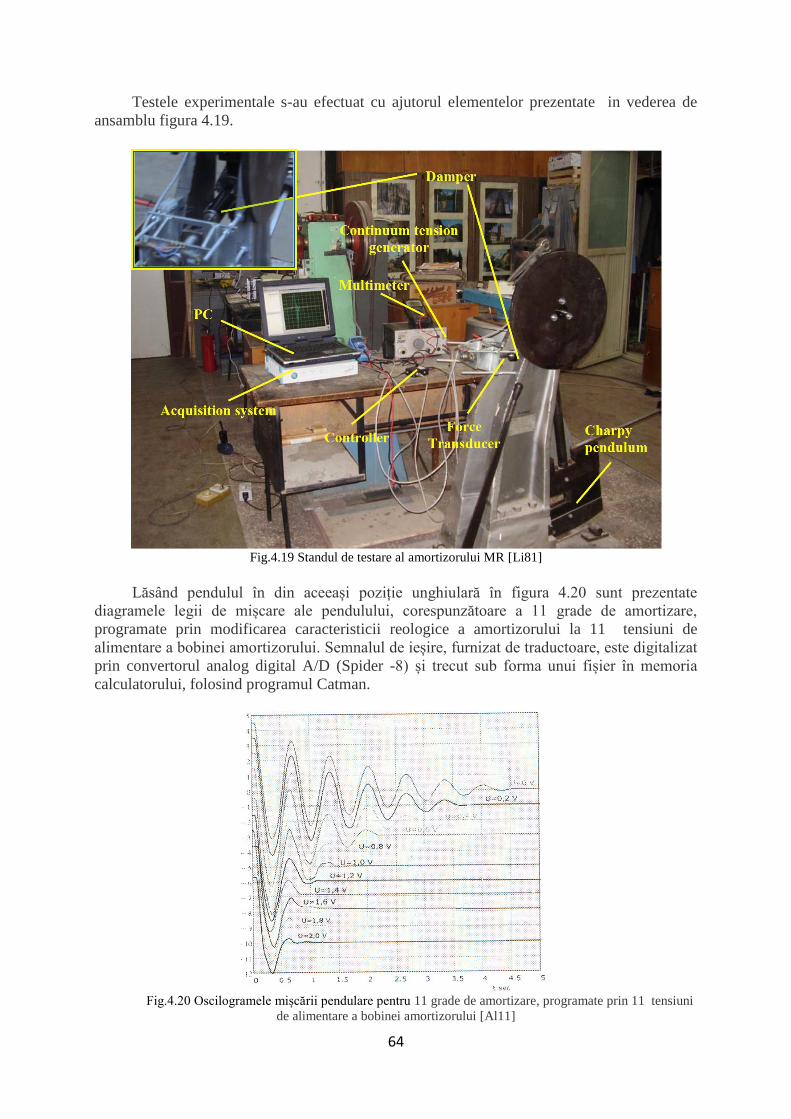
64
Testele experimentale s-au efectuat cu ajutorul elementelor prezentate in vederea de
ansamblu figura 4.19.
Fig.4.19 Standul de testare al amortizorului MR [Li81]
Lăsând pendulul în din aceeași poziție unghiulară în figura 4.20 sunt prezentate
diagramele legii de mișcare ale pendulului, corespunzătoare a 11 grade de amortizare,
programate prin modificarea caracteristicii reologice a amortizorului la 11 tensiuni de
alimentare a bobinei amortizorului. Semnalul de ieșire, furnizat de traductoare, este digitalizat
prin convertorul analog digital A/D (Spider -8) și trecut sub forma unui fișier în memoria
calculatorului, folosind programul Catman.
Fig.4.20 Oscilogramele mișcării pendulare pentru 11 grade de amortizare, programate prin 11 tensiuni
de alimentare a bobinei amortizorului [Al11]

65
Cum este și normal, gradul de amortizare cel mai scăzut este pentru tensiunea de
alimentare , stingerea oscilației corespunzătoare făcându-se după 7 secunde iar pentru
o tensiune de alimentare de 2 stingerea oscilației făcându-se după numai o secundă.
Prin prelucrarea acestor oscilograme se poate determina caracteristica de amortizare a
oricărui dispozitiv disipativ, fără a necesita utilizarea unui excitator cu forță de excitație de
nivel înalt, cum sunt pulsatoarele hidraulice, foarte scumpe.
Autorul a realizat un model pentru a studia comportamentul dinamic a sistemului
amortizor-pendul, model realizat în programul SimMechanics ce rulează sub meniul de
programare Matlab și un stand pentru experimente și măsurători prin modificarea unui pendul
Charpy.
Din studiul comparativ al datelor experimentale și a celor simulate se poate concluziona
că rezultatele oferite de modelul teoretic se apropie de datele obținute experimental.
Folosind același stand experimental Liviu Bereteu și colaboratorii în [Li81] calculeză
randamentul amortizorului MR ca fiind raportul dintre energia disipată de amortizor și cea
impusă acestuia:
Energia impusă amortizorului poate fi calculată din diagramele de bază forță - deplasare
iar energia disipată de amortizor poate fi considerată ca o măsură a performanțelor acestuia.
Considerând graficul forță-deplasare a comportamentului unui amortizor vâscos, energia
disipată este dată de aria elipsei, figura 4.21.
Fig.4.20 Diagrama forță-deplasare [Li81]
Energia disipată dată de aria elipsei se calculează prin următoarea integrală:
unde , și este forța generată de amortizor.
unde este deplasarea în lungul amortizorului.
În figura 4.21 este reprezentată diagrama experimentală forță-deplasare pentru diferite
valori a intensității curentului aplicat bobinei amortizorului MR. Culoarea roșie este pentru
amortizorul clasic.
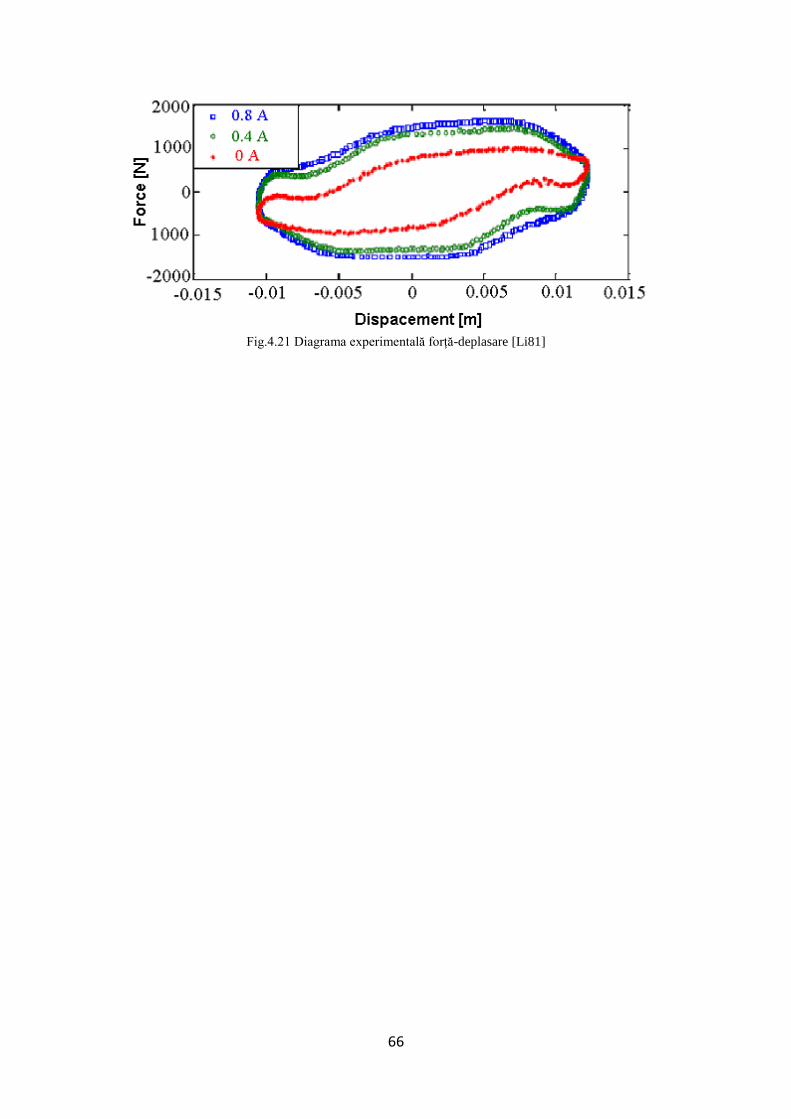
66
Fig.4.21 Diagrama experimentală forță-deplasare [Li81]
67
V. CONCLUZII ȘI DIRECŢII DE CERCETARE
5.1 Concluzii
1. Încă de la apariția primelor autovehicule, odată cu conștientizarea importantei acestora,
sub aspect economic şi social, au fost formulate şi primele cerințe privind asigurarea
confortului. De atunci, între constructorii de autovehicule s-a născut o competiție
acerbă care a avut ca rezultat perfecționarea autovehiculelor (şi a caracteristicilor
funcționale ale suspensiei în particular) cu scopul de a-şi asigura prezența dominantă pe
piață.
2. Dintre toate sistemele ce intră în compunerea autovehiculelor se poate spune ca sistemul
de suspensie a avut o evoluție permanentă, constructiva si funcțională, ce s-a menținut
în tandem cu a autovehiculului în ansamblu său. Aceasta remarca are la baza observația
că, încă de la primele tipuri de autovehicule, echipate cu sisteme de suspensie
rudimentare si cu caracteristici mai mult decât precare, cerințele privind ridicarea
performantelor, sub aspect dinamic sau al reducerii consumului de combustibil, de
exemplu, au fost dublate de cerințe (uneori chiar necesitați) vizând îmbunătățirea
caracteristicilor suspensiei.
3. După cum s-a arătat, sistemul de suspensie este responsabil pe de-o parte de asigurarea
confortului dar contribuie decisiv şi la îndeplinirea cerințelor referitoare la asigurarea
stabilității, manevrabilității şi maniabilității autovehiculului. De asemenea tot de
caracteristicile şi parametrii suspensiei depinde și buna funcționare a celorlalte sisteme
şi agregate ce intră în compunerea autovehiculului. Daca pe autovehicul exista sisteme
sau agregate ce nu sunt indispensabile pentru starea de operativitate, nu același lucru se
poate spune despre sistemul suspensiei.
4. Degradarea parametrilor funcționali ai sistemului de suspensie poate conduce la
oscilații şi trepidații necontrolate ale masei suspendate (caroserie) și nesuspendate,
fenomene supărătoare / obositoare pentru personalul transportat, dăunătoare pentru
materialele aflate în caroserie, impunând deci rularea cu viteze foarte mici. Dacă, mai
mult decât atât, sistemul suspensiei este complet deteriorat, aceasta poate echivala, în
majoritatea cazurilor, cu scoaterea din funcțiune a întregului autovehicul.
5. Folosind criteriul perechii element elastic – element de amortizare ce a stat la baza
proiectării sistemului de suspensie, pentru mărirea stabilității și manevrabilității
autovehiculului trebuie asigurat un contact permanent al roților pe calea de rulare,
caz în care este necesar ca sarcinile dinamice ale roţii sa fie cât mai mici.
6. Asigurarea confortului impune pe de altă parte ca mișcarea masei suspendate sa fie
cât mai mică.
7. Se observă deci, faptul că, cele două cerințe sunt influențate de mărimea masei
suspendată şi a celei nesuspendată precum şi de raportul lor. Sarcina proiectanților este
să stabilească între cele două direcții o soluție de compromis care să răspundă cel mai
bine condițiilor de rulare și încărcare ce pot apărea pe parcursul utilizării
autovehiculului.
68
8. Atenuatoarele de vibrații semi-active realizate cu materiale magneto-reologice în
matriță lichidă reprezintă un progres semnificativ în acest domeniu și nu numai.
Aplicațiile acestora sunt extrem de numeroase.
9. Cele mai utilizate sisteme automate de control în construcția suspensiilor semi-active
sunt skyhook, groundhook şi combinat. În cazul sistemelor de tip skyhook scopul
primordial al reglării amortizării este acela de a limita oscilațiile masei suspendate, în
consecință, de a mări confortul autovehiculului. Amortizorul poate comuta între două
caracteristici date de coeficienți diferiți de atenuare în funcție de viteza relativă a
amortizorului şi de viteza absolută a masei suspendate. Sistemele de tip groundhook
acționează în sensul îmbunătățirii performanţelor de stabilitate și manevrabilitate prin
limitarea oscilațiilor masei nesuspendate. Ca si în cazul anterior amortizorul va lucra tot
după doua caracteristici, dar avându-se însă în atenție viteza absolută a masei
nesuspendate. Metoda de control combinată îmbină avantajele metodelor skyhook și
groundhook în sensul în care reușește să îmbunătățească atât performanţele dinamice ale
masei suspendate cât si pe cele ale masei nesuspendate.
10. În cazul utilizării metodelor de calcul, analiză şi proiectare pentru construcția
sistemelor de suspensie ale autovehiculelor, facilitatea majoră rezidă din multitudinea
diferiților factori de control utilizați pentru a studia diverse situații funcționale și de
mișcare a sistemelor de suspensie.
11. Sistemele de suspensiei ale autovehiculului în ansamblul sau, au devenit în prezent tot
mai complexe, înglobând, atât componente clasice sub aspectul funcțiilor îndeplinite,
dar mult rafinate sub aspect structural și tehnologic, cât si componente electronice si
hidraulice, toate concurând la obținerea unor caracteristici corespunzătoare pentru
ansamblu.
69
5.2 Direcţii de cercetare
În urma studierii aspectelor legate de controlul suspensiilor până în stadiul actual se
desprind următoarele direcţii necesare cercetării:
1. Se va stabili modelul matematic ce va fi adoptat pentru studiul comportării reologice a
elementelor sistemului de suspensie;
2. Se va realiza modelarea matematică a sistemului de suspensie folosind diferiți
algoritmi de calcul cu şi fără folosirea fluidelor magneto-reologice;
3. Simularea funcţionării sistemului de control semi-activ în mediul de programare
Matlab, folosind și blocurile definite în biblioteca programului. Cu ajutorul blocurilor
Simulink şi a caracteristicilor amortizorului pentru cazul fluidelor magneto-reologice
se vor trasa o serie de caracteristici de funcţionare;
4. Se va construi un stand asemănător sistemului de suspensie față tip McPherson,
compus din:
a. amortizor magneto-reologic;
b. calculator de comandă;
c. senzor de înălțime a sistemului arc amortizor;
d. comutator de comandă,
sau se vor adapta pe un vehicul patru amortizoare magneto-reologice împreună cu
partea de comandă a acestora, precum și senzorii de accelerație montați atât pe caroserie cât si
pe partea de suspensie față și spate;
5. Standul sau vehiculul modificat va fi suspus încercărilor pe testerul de verificare a
amortizoarelor construit de compania Maha al societății Sc Darex Auto SRL la care
voi folosi partea hidraulică de comandă, excitatorul cât și softul pentru compararea
rezultatelor;
6. Se va cerceta comportamentul amortizorului magneto-reologic în cele trei moduri de
funcționare (normal, setare sport, setare confort), cât și la diferiți curenți de
alimentarea a bobinei amortizorului. Se va face o comparație cu rezultatele unui
amortizor clasic;
7. Rezultatele obținute se vor compara în vederea validării modelelor matematice
propuse și calculate cu ajutorul programului SimMechanics ce rulează sub mediul de
programare Matlab.
70
Bibliografie
[Ph09] Volkswagen. (2009) "The Phaeton Air Suspension with Controlled Damping, Self
Study Books".
[Gt13] GTR Web site. (2004) "Gtr forums". [Online].
http://features.gtrforums.com/article.php?id=13
[Gt11] Gtroc.org. (2011) [Online]. http://www.gtroc.org/news/gt-r/r35-gt-r-the-original-
specification
[Ni10] Nissan. (2010) "Nissan GT-R Service operation manual".
[Vo06] Volkswagen. (2006) Volkswagen Phaeton Service manual.
[Au07] Audi. (2007) "Audi TT Coupé ´07 - Suspension System Service training manual".
[Zf01] Z. Lemförder. "Fahrwerktechnik: Werkfotos, Interne Präsentationen".
[Ko00] Konik, Bartz, Bärnthol, and B. Wimmer. (2000) "Dynamic Drive – Das neue aktive
Wankstabilisierungssystem der BMW".
[Jr51] J. Rabinow, ""Magnetic fluid torque and force transmitting device"," Patent
2,575360, Oct. 20, 1951.
[JR54] J. Rabinow, ""Magneticfluid shock absorber"," Patent 2,667,237, Jan. 26, 1954.
[Ca94] J. D. Carlson and M. J. Chrzan, ""Magnetorheological fluid dampers"," Patent
5,277,281, Jan. 11, 1994.
[Fi41] D. Fischer and R. Isermann, ""Mechatronic semi-active and active vehicle
suspensions"," Control Engineering Practice 12, 2004.
[Că06] C. Marius and R. Radu, ""Studiul unor posibilități de control prin tehnici fuzzy al
unui amortizor cu lichid magnetoreollogic"," in , Iași, 2006, pp. 945-950.
[Za65] L. A. Zadeh, ""Fuzzy sets"," Information and control, 1965.
[Re96] B. Reusch, ""Mathematics of Fuzzy Logic"," Real World Application and intelligent
technologies, 1996.
[Xm11] X.-M. Dong and M. Y. C.-R. Liao, ""Fuzzy sliding mode control based on hybrid
Taguchi generic algoritm for magneto-rheological suspension system"," Journal of
Automotive Engineering, 2011.
[Li81] L. Bereteu, R. Nagy, A. Boltoși, and A. Chiriac, ""Study and tests of a semi-active
damper using complex media"," 2008.
[Bf96] B. F. S. Jr, S. J. Dyke, and M. K. S. J. D. Carlson, ""Phenomenological Model of a
Magnetorheological Damper"," ASCE Journal of Engineering Mechanics, 1996.
[Ib06] B. Ioan, ""Advances in magnetorheological suspension: Production and properties","
Journal ind. eng. chem., vol. 12, no. 4, 2006.
[Bi99] B. Ioan, ""Nanoparticle production by plasma"," Materials science and engineering
B, vol. 68, no. 1, 1999.
[Ca00] C. J. D. Jolly, ""MR-fluid, foam and elastomer device"," Mechatronics 10, 2000.
[Gi99] G. J. M., N. M. E., and E. L. D. T. J. L., ""Magnetorheological Elastomers; Propertis
and apllications," 1999.
[Re02] Renault. (2002) "Renault self study curses".
[Jc96] J. M. R. and B. C. Carlson and J. D. Munoz, ""A model of the behaviour of
magnetorheological materials"," Smart mater. struct. 5, 1996.
[Jo96] J. M. R., C. J. D., and M. B. C. B. T. A., ""The Magnetoviscoelastic response of
elastomer composites consisting of ferrous particles embedded in polymer matrix","
71
J. Intel. Mater. Syst. Struct., 1996.
[Jo98] J. M. R. and J. D. Bender J. W. Carlson, ""Properties and apllications of commercial
magnetorheological fluids"," Proceedings of spie - The international society for
optical engineering, 1998.
[Li08] L. Bereteu, A. Boltoși, and R. N. A. Chiriac, ""Double separating screen active
control"," Physics conference, 2008.
[Ly00] L. W. H., Y. G. Z., and C. G. Y. S. H. &. Yap, ""Testing and steady state modeling of
a linear MR damper under sinusoidal loading"," Smart mater. struct. 9, 2000.
[Lo11] Corporation Lord. "www.marfluid.com; www.lord.com".
[Be11] B. Heißing and M. Ersoy, "Chassis Handbook, Fundamentals, Driving Dynamics,
Components, Mechatronics, Perspectives". Germany, 2011.
[Gf05] G. Frățilă, M. Frățilă, and S. samoilă, "Autovehicule- cunoaștere, întreținere și
reparare", D. ș. pedagogică, Ed. 2005.
[Ne09] N. Andrei. (2009) "Modele matematice în mecanică".
[Al11] B. Alexandru, ""Controlul vibrațiilor utilizând materiale compozite magneto-
reologice"," 2011.
[Ch11] C. S.-B and L. S.-K., ""A hysteresis model for the field-dependent damping force of
magnetorheological damper"," Journal of sound and vibration, 2011.
[Re19] Renault. (1990) "Renault Safrane service manual".











![(2012) Cronologia Egiptului Antic. Stadiul Actual Al Cercetarilor [N. Ciobanu]](https://static.fdocumente.com/doc/165x107/55721062497959fc0b8d1508/2012-cronologia-egiptului-antic-stadiul-actual-al-cercetarilor-n-ciobanu.jpg)






