SARCINA - win.tue.nlmpisaren/_files/0506_BScThesis/text_invert.pdf · urmeaza: motorul Otto,...
55
3 Mod Coala N Document Semnat. Data Coala UTM.2153. 0 1.001 SARCINA Se cere elaborarea unui algoritm de stabilizare a turatiilor unui motor cu ardere interna. Este necesara obtinerea unor performante de reglare superioare regulatoarelor liniare PID. În special, se cere o imunitate buna la perturbatie, care în cazul dat apare ca o marirea sau micsorare brusca a cuplului sarcinii aplicat la axul motorului. Raspunsul la semnal treapta trebuie sa fie aperiodic, un semnal oscilatoriu nu este acceptabil
Transcript of SARCINA - win.tue.nlmpisaren/_files/0506_BScThesis/text_invert.pdf · urmeaza: motorul Otto,...

3 Mod Coala N Document Semnat . Data
Coala UTM.2153.01.001
SARCINA
Se cere elaborarea unui algoritm de stabilizare a turatiilor unui motor cu
ardere interna. Este necesara obtinerea unor performante de reglare superioare
regulatoarelor liniare PID. În special, se cere o imunitate buna la perturbatie, care
în cazul dat apare ca o marirea sau micsorare brusca a cuplului sarcinii aplicat la
axul motorului. Raspunsul la semnal treapta trebuie sa fie aperiodic, un semnal
oscilatoriu nu este acceptabil

4 Mod Coala N Document Semnat . Data
Coala UTM.2153.01.001
INTRODUCERE
Automobilele moderne sunt echipate cu accesorii ce actioneaza ca sarcina
asupra motorului. În regim de functionare în gol, turatiile pot scadea brusc când
sarcinile sunt pornite. Conditionarea aerului (climatizorul) poate fi cea mai mare
sarcina, dar de asemenea farurile, amplificatorul volanului, încalzirea electrica a
ferestrelor si motoarele electrice ce misca ferestrele în sus si în jos sunt sarcini
însemnate.
Obiectivul acestei lucrari este de proiecta un regulator, astfel încât turatiile
sunt mentinute la acelasi nivel independent de variatiile în sarcina. Proiectarea
regulatorului se face utilizând un model validat al motorului cu ardere interna [2].
Acest model este o reprezentare fenomenologica de frecvente joase a unui motor
de patru cilindri. Dinamica sistemului modelat a fost verificata si validata prin
testare dinamometrica a motorului, care a demonstrat ca un model de ordin relativ
redus al motorului poate captura principalele procese pentru a fi utilizat la
proiectarea sistemelor automate de tractiune.
În afara de stabilizarea turatiilor în regim de functionare în gol, sistemul
automat proiectat este utilizabil si pentru asa-numitul cruise control, adica
pastrarea vitezei constante automobilului la apasarea unui buton de comanda de
catre sofer. Acest regim este utilizat în special pe automagistrale, unde
autovehiculul merge monoton si fara opriri. În acest caz în calitate de perturbatii
apar deja nu dispozitivele electrice si electronice din automobil, ci factorii externi.
Evident ca cea mai importanta perturbatie externa este panta (unghiul de înclinare)
drumului. Printre alti factori sunt directia si puterea vîntului, modificarea masei
automobilului.
În domeniul reglarii turatiilor motorului cu ardere interna (MAI) au fost
implementate diferite tehnici de reglare asa cum sunt reglarea clasica, fuzzy, H-
infinit, cu predictie. În aceasta lucrare se va proiecta un regulator PID cu parametri

5 Mod Coala N Document Semnat . Data
Coala UTM.2153.01.001
de acord variabili (PID cu auto-acordare). Aceasta alegere se explica prin
comportarea neliniara a MAI si necesitatea acordarii regulatorului pentru fiecare
regim de functionare în parte. Se intentioneaza a obtine performante superioare
unui regulator PID liniar (cu parametri constanti) proiectat în [2].
Sub comanda unui regulator PID liniar procesul tranzitoriu al sistemului este
diferit la diferite turatii, astfel neatingându-se performantele optime. De aceea
îmbunatatirea cea mai importanta care se prevede sa o aduca regulatorul PID cu
parametri variabili este obtinerea aceluiasi proces tranzitoriu la toate valorile
turatiilor, adica obtinerea unei comportari constante si robuste a motorului. De
asemenea este necesar ca imunitatea la perturbatii a sistemului rezultant sa fie cât
mai mare.
Pentru a aprecia performantele regulatorului proiectat în ultimul capitol se vor
face simularile respective si rezultatele obtinute în cadrul acestui proiect vor fi
comparate cu rezultatele obtinute în [2].

6 Mod Coala N Document Semnat . Data
Coala UTM.2153.01.001
1. FUNCTIONAREA MOTOARELOR CU ARDERE INTERNA
Definitie: Se numeste motor cu combustie (sau ardere) interna orice
dispozitiv care obtine energie mecanica direct din energie chimica prin arderea
unui combustibil intr-o camera de combustie care este parte integranta a motorului
(spre deosebire de motoarele cu ardere externa unde arderea are loc in afara
motorului).
Exista de fapt patru tipuri de baza de motoare cu ardere interna dupa cum
urmeaza: motorul Otto, motorul Diesel, motorul cu turbina pe gaz si motorul
rotativ.
Motorul Otto este denumit astfel dupa numele inventatorului sau Nikolaus
August Otto, iar motorul Diesel în aceeasi maniera dupa numele inginerului
german de origine franceza Rudolf Diesel. Motorul Diesel este folosit pentru
generatoare de energie electrica, de asemenea el este utilizat si la camioane si
autobuze precum si în unele automobile. Motorul Otto este motorul folosit pentru
majoritatea automobilelor.
1.1 Componentele unui MAI
Partile esentiale ale unui motor Otto si Diesel coincid. Camera de ardere este
formata dintr-un cilindru inchis la un capat si un piston care aluneca de sus in jos.
Printr-un sistem biela manivela pistonul este legat de un arbore cotit care transmite
lucrul mecanic spre exterior (de obicei cu ajutorul unei cutii de viteze). Rolul
arborelui cotit este acela de a transforma miscarea de “du-te vino” a pistonului in
miscare de rotatie.
Un motor poate avea de la unu pana la 28 de cilindri (pistoane) care pot fi
asezate asa zis in linie sau in V. Sistemul de alimentare cu combustibil consta
dintr-un rezervor o pompa si un sistem pentru vaporizarea combustibilului care l-a
motorul Otto poate fi carburator sau la masinile de constructie recenta sisteme de

7 Mod Coala N Document Semnat . Data
Coala UTM.2153.01.001
injectie. Aceste sisteme de injectie sunt gestionate electronic iar eficienta lor a
facut ca ele sa fie folosite pe majoritatea automobilelor
Fig. 1.1 Sectiune printr-un motor.
Aerul din amestecul carburant precum si gazele evacuate sunt gestionate de
supape actionate mecanic de un ax cu came. La toate motoarele este necesar un
sistem de aprindere a combustibilului care la motorul Otto este o bujie. Conform
principiului al doilea al termodinamicii, un motor trebuie sa cedeze caldura; în
general acest lucru este realizat in doua moduri, prin evacuarea gazelor rezultate
din arderea carburantului si prin folosirea unui radiator. In timpul deplasarii unui
vehicul echipat cu un motor cu ardere interna, simpla deplasare genereaza un flux
de aer rece suficient pentru a asigura mentinerea temperaturii motorului in limite

8 Mod Coala N Document Semnat . Data
Coala UTM.2153.01.001
acceptabile dar pentru ca motorul sa poata functiona si când vehiculul sta,
radiatorul este echipat cu unul sau mai multe ventilatoare. De asemenea se mai
folosesc si sisteme de racire cu apa mai ales pentru barci.
Motorul Otto
Fig. 1.2 Motor Morris din 1925
1.2 Functionarea MAI
Motorul Otto standard este un motor in 4 timpi in care pistonul face 4 curse.
Sa vedem care sunt acestea:
Timpul 1: Admisie; pistonul porneste de la capatul superior al cilindrului s i
în cilindru este aspirat amestecul de aer si benzina deoarece supapa de admisie este
deschisa la sfârsitul acestui timp pistonul ajunge la capatul inferior si supapa de
admisie este închisa.
Timpul 2: Compresie adiabatic a; amestecul se încalzeste pâna când pistonul
ajunge la capatul superior.
Timpul 3: Ardere si destindere adiabatica; o descarcare electrica a bujiei
aprinde amestecul carburant al carui ardere are loc rapid, ca o explozie. De aici

9 Mod Coala N Document Semnat . Data
Coala UTM.2153.01.001
provine si denumirea alternativa de motor cu explozie. Presiunea si temperatura în
cilindru cresc brusc si pistonul este împins. Timpul 3 este timpul motor, in care se
efectueaza lucru mecanic asupra pistonului. La sfârsitul acestui timp se deschide
supapa de evacuare
Timpul 4: Evacuarea gazelor arse în atmosfera începe printr-un proces de
racire izocora, pâna când gazele ajung la presiunea atmosferic a. Pistonul se ridica
si gazele sunt evacuate supapa de evacuare fiind deschisa. La capatul ciclului
supapa de evacuare se inchide supapa de admisie se deschide si începe un nou
ciclu.
Randamentul mecanic efectiv al unui motor Otto modern este de circa 20-
25%
Fig. 1.3 Structura si functionarea MAI

10 Mod Coala N Document Semnat . Data
Coala UTM.2153.01.001
2. MODELUL MATEMATIC NELINIAR AL MAI
Motoare cu ardere interna reprezinta niste sisteme neliniare foarte complexe
si obtinerea unor simplificari corespunzatoare a comportarii lor este o problema
majora. Natura simplificarilor facute si modelele rezultante trebuie sa fie comode
pentru utilizare în procesul de sinteza a algoritmului de reglare. Aceasta, în
general, va însemna o simplificare mult mai mare a proceselor, decât în cazul când
se încearca crearea modelelor utilizate pentru proiectarea motorului însusi.
Modelele complexe tridimensionale ce tin cont de dinamica fluidelor si reactiile
chimice în interiorul motorului pot ajuta în designul camerei de ardere, însa nu sunt
o alegere convenabila pentru ingineria reglarii datorita unor durate mari a
calculelor necesare.
Elaborarea modelelor pentru noi aplicatii sau pentru a acoperi un numar mai
mare a regimurilor de functionare a motorului, reprezinta sarcina majora în
domeniul comenzii automate a motoarelor. În general, modelele motoarelor cu
ardere interna pot fi de doua tipuri:
- time-based (bazat pe timp);
- event-based (bazat pe evenimente);
Modelul matematic utilizat în aceasta lucrare va fi unul bazat pe evenimente
luându-se în considerare avantajul acestor tipuri de modele în ceea ce priveste
imitarea functionarii în 4 timpi a motoarelor cu ardere interna. El se bazeaza pe
rezultatele publicate de Crossley si Cook (1991) si descrie simularea unui MAI de
4 cilindri.
Modelul general al MAI poate fi divizat în submodele ale urmatoarelor
fenomene si elemente functionale:
• Supapa de reglaj
• Colector (teava de intrare)
• Debitul de aer spre cilindri

11 Mod Coala N Document Semnat . Data
Coala UTM.2153.01.001
• Etapa de compresie
• Generarea cuplului si acceleratia
Componente suplimentare pot fi adaogate la acest model pentru a imita mai
exact comportarea sistemului. Aceasta însa va duce la cresterea cerintelor fata de
sistemul de calcul pe care se face simularea.
2.1 Supapa de reglaj
Primul element al simularii este supapa de reglaj. Aici, marimea de intrare
este unghiul placii ce limiteaza cantitatea de aer. Rata la care modelul introduce aer
în teava de intrare poate fi exprimat ca produs a 2-ua functii – una, o functie
empirica ce depinde numai de unghiul placii; si cealalta, o functie ce depinde de
presiunea atmosferica si presiunea în colector. În cazul unei presiuni mai mici în
colector, debitul prin supapa este sonic si depinde numai de unghiul placii.
Debitul de aer:
(2.1)
unde
Pm – presiunea în colector (bar)
Pamb – presiunea atmosferica (bar)

12 Mod Coala N Document Semnat . Data
Coala UTM.2153.01.001
2.2 Colectorul
Modelul descrie colectorul (teava de intrare) ca o ecuatie diferentiala pentru
presiunea în colector. Diferenta între debitul de intrare si cel de iesire reprezinta
variatia masei în timp. Aceasta cantitate, în conformitate cu legile gasului ideal,
este proportionala cu variatia (derivata) presiunii în colector.
(2.2)
unde
R – constanta specifica a gazelor
T – temperatura (K)
Vm – volumul colectorului (m3)
- debitul de iesire a aerului (g/s)
- variatia presiunii în colector (g/s)
2.3 Debitul de aer spre cilindri
Debitul aerului ce este pompat spre cilindri din colector este descris de o
ecuatie empirica. Acest debit este o functie de presiunea în colector si turatiile
motorului.
(2.3)
unde
N – viteza unghiulara a axului motorului (rad/s)

13 Mod Coala N Document Semnat . Data
Coala UTM.2153.01.001
Pm – presiunea în colector (bar)
Pentru a determina cantitatea de aer pompata în c ilindri, modelul integreaza
debitul de aer dinspre colector si îl esantioneaza la sfârsitul fiecarui timp de
admisie. Astfel se determina cantitatea (masa) totala de aer prezent în fiecare
cilindru dupa timpul (etapa) de admisie si înainte de compresie.
2.4 Etapa de compresie
Într-un motor cu ardere interna de 4 cilindri inline, 180 O de rotatie a
arborelui separa aprinderea amestecului în fiecare cilindru succesiv. Aceasta
înseamna ca în fiecare cilindru aprinderea are loc o data la 2 rotatii a arborelui. În
acest model, admisia, compresia, arderea si evacuarea au loc simultan (în orice
moment de timp un cilindru este în fiecare faza). Pentru a lua în considerare
compresia, arderea fiecarei cantitati de aer admise este întârziata cu 180O de rotatie
a arbore lui de la sfârsitul etapei de admisie.
2.5 Generarea cuplului si acceleratia
Elementul final al simularii descrie cuplul mecanic dezvoltat de motor.
Acest cuplu se calcula printr-o relatie empirica care depinde de cantitatea de aer
admisa în cilindri, raportul aer-combustibil, avansul scânteii (aprinderii) si viteza
motorului.
(2.4)
ma – masa aerului în cilindru pentru ardere
A/F – raportul aer/combustibil

14 Mod Coala N Document Semnat . Data
Coala UTM.2153.01.001
s – avansul scânteii
Torque eng – cuplul produs de motor (Nm)
Scazând din cuplul dezvoltat de motor cuplul sarcinii vom obtine acceleratia:
(2.5)
unde
J – momentul de inertie al (kg·m2)
- acceleratia (rad/s2)

15 Mod Coala N Document Semnat . Data
Coala UTM.2153.01.001
3. SIMULAREA PE CALCULATOR A MAI
Elementele modelului matematic descris în capitolul precedent au fost
incorporate într-un model al motorului utilizând mediul de simulare Simulink, care
face parte din pachetul MATLAB 6.5. În paragrafele urmatoare se va descrie
implementarea modelului neliniar complex al MAI si elementele cheie utilizate
pentru aceasta.
În fig. 3.1 este aratat nivelul ierarhic superior al modelului din Simulink.
Blocurile majore corespund listei de functii de nivel înalt descrise în capitolul
anterior. Profitând de capacitatile de modelare ierarhica ale Simulink-ului,
majoritatea blocurilor din fig. 3.1 sunt compuse din blocuri mai mici. Urmatoarele
paragrafe descriu aceste blocuri.
Fig. 3.1 Nivelul ierarhic superior al modelului motorului cu ardere interna.
3.1 Supapa de reglaj si colectorul
Modelele Simulink pentru supapa de reglaj si colector sunt aratate în fig. 3.2.
Supapa de reglaj se comporta într-o maniera neliniara si este modelata ca un sistem
cu 3 intrari. Ecuatiile individuale din ecuatia 2.1 sunt implementate ca blocuri
functionale. Acest fapt ofera un mod convenabil de a descrie o ecuatie neliniara de
mai multe variabile. Un bloc Switch determina daca debitul este sonic (moleculele

16 Mod Coala N Document Semnat . Data
Coala UTM.2153.01.001
de aer se misca cu viteza sunetului) prin compararea raportului de presiuni
(atmosferica si interioara) cu o valoare de referinta, care este egala cu 0.5 (ecuatia
1.1). În regimul sonic, debitul este functie numai de pozitia supapei de reglaj.
Directia miscarii aerului este de la presiunea mai înalta spre presiune mai joasa, asa
cum este determinata de blocul Sign. Având aceasta în vedere, blocul Min asigura
ca raportul de presiuni sa fie întotdeauna mai mic sau egal cu unitatea.
Colectorul este modelat de o ecuatie diferentiala asa cum este descris în
ecuatia 2.2. Conform acestei ecuatii se calcula presiunea instantanee în colector.
Un bloc functional de asemenea calcula debitul de aer spre cilindri ca functie de
presiunea în colector si turatiile motorului (ecuatia 1.3).
3.2 Admisia si compresia
Un integrator acumuleaza debitul de aer spre cilindri în blocul Intake. Blocul
Valve Timing genereaza impulsuri ce corespund anumitor pozitii la rotatia
arborelui cotit. Evenimentele de admisie (4 evenimente) au loc la fiecare rotatie a
arborelui cu came, sau în fiecare 360º de rotatie. Având în vedere ca arborele cu
came se roteste de doua ori mai încet decât arborele cotit, evenimentele de admisie
vor avea loc în fiecare 720º de rota tie a arborelui cotit (axului motorului) . T imp de
720º de rota tie au loc 4 evenimente de admisie în cei 4 cilindri, deci vom avea în
final câte un eveniment de admisie la fiecare 180º de rotatie a axului. Fiecare
eveniment initiaza o singura executie a subsistemului Compression. Iesirea trigger
a subsistemului Compression printr-o reactie reseteaza integratorul Intake. În acest
fel, desi ambele triggere conceptual au loc în acelasi moment de timp, iesirea
integratorului este procesata de blocul Compression imediat înainte de a fi resetat
integratorul. Din punct de vedere functional, subsistemul Compression utilizeaza
un bloc Unit Delay (z -1) pentru a introduce o retinere de 180º între admisia si
arderea fiecarei portii de aer.

17 Mod Coala N Document Semnat . Data
Coala UTM.2153.01.001
Sa consideram un ciclu complet (4 timpi) a unui cilindru. Pe durata timpului
de admisie, blocul Intake integreaza debitul de aer dinspre colector. Dupa 180º
rotatie a arborelui cotit, supapa de admisie se închide si blocul Unit Delay în
subsistemul Compression memoreaza starea integratorului. Aceasta valoare, masa
acumulata de aer, este disponibila la iesirea subsistemul Compression cu 180º mai
tîrziu pentru utlizare la simularea arderii (de catre blocul Combustion). Pe durata
timpului de ardere, axul accelereaza datorita cuplului generat. Ultimele 180º,
timpul de evacuare, se termina cu resetarea integratorului Intake, pregatit pentru
urmatorul ciclu complet de 720º a acestui cilindru.
Pentru 4 cilindri s-ar fi putut utiliza 4 blocuri Intake, 4 subsisteme
Compression, etc., dar fiecare ar fi în stare de asteptare 75% din timp.
Implementarea a fost facuta mai eficienta prin executarea functiilor celor 4 cilindri
cu un singur set de blocuri. Aceasta este posibil deoarece, la nivelul de detalizare
utilizat, fiecare functie se aplica unui singur cilindru la orice moment de timp.
3.3 Arderea
Cuplul dezvoltat de motor este o functie de patru variabile. Modelul utilizeaza
un bloc Mux pentru a combina aceste variabile într-un vector ce reprezinta intrarea
pentru blocul Torque Gen. Aici, un bloc functional calculeaza cuplul dezvoltat de
motor, asa cum este descris empiric în ecuatia 2.4. Cuplul sarcinii se scade din
cuplul motorului în subsistemul Vehicle Dynamics. Cuplul rezultant, împartit la
inertie produce acceleratia unghiulara, care este integrata pentru a ajunge la viteza
unghiulara a arborelui cotit, adica a axului motorului.
3.4 Rezultatele simularii motorului
Pentru a începe simularea se alege Start din meniul Simulation . Ferestrele
Scope din Simulink (care imita niste osciloscoape virtuale) afiseaza urmatoarele
semnale:

18 Mod Coala N Document Semnat . Data
Coala UTM.2153.01.001
• Unghiul supapei de reglaj – semnal de comanda
• Cuplul sarcinii – semnal perturbator
• Viteza (turatiile) motorului – semnal de iesire
Semnalele enumerate anterior sunt aratate în fig. 3.2 si fig. 3.3.
Fig. 3.2 Semnale externe (unghiul de deschidere – jos, sarcina la motor – sus)
Fig. 3.3 Modificarea turatiilor motorului sub actiunea semnalelor externe

19 Mod Coala N Document Semnat . Data
Coala UTM.2153.01.001
Modelul implementat are o pozitionare exacta în timp a evenimentelor de
admisie, o caracteristica critica în crearea unui model de acest tip. Fidelitatea înalta
a modelului se datoreaza în special implementarii lui în calitate de sistem dinamic
cu evenimente discrete.

20 Mod Coala N Document Semnat . Data
Coala UTM.2153.01.001
4. MODELE LINIARE ALE MAI
Comportarea obiectelor comandate în general se descrie cu ecuatii
diferentiale neliniare . Complexitatea analizei si gasirii solutiei acestor ecuatii duce
la introducerea unor aproximari astfel încât procesul studiat este descris cu ecuatii
diferentiale liniare sau ecuatia neliniara initia la este înlocuita cu o ecuatie liniara
exprimata prin variatii de la punctul de echilibru (delta) ale unor variabile de
ordinul unu (metoda liniarizarii). Necesita mentionat faptul ca o astfel de înlocuire
a ecuatiilor neliniare cu cele liniare este valabila doar pentru un diapazon limitat a
variatiei.
În teoria sistemelor se utilizeaza mai multe metode de alcatuire a ecuatiilor
dinamicii obiectelor
1. Ecuatiile diferentiale sau ecuatiile cu diferente se deduc analitic în baza
analizei proceselor fizice ce au loc în obiectul tehnic
2. Cu ajutorul caracteristicilor statice a obiectului care sunt determinate
experimental si prezentate sub forma de grafice
3. Prin identificarea obiectului tehnic care este considerat a fi o cutie neagra
pentru care sunt cunoscute semnalele de intrare si iesire
Problema modelarii proceselor, utilizând un set de date, obtinut din
observatii directe asupra proceselor, constituie obiectul unor domenii de cercetare,
pornind de la regresia neliniara si ajungând pana la identificarea sistemelor si
„machine learning". În literatura dedicatã acestui subiect, se disting doua directii
principale, care utilizeaza metode bazate pe memorare localã, respectiv globalã.
Modelarea globala construieste, din setul de date disponibile din proces, un
singur model functional. În rezultatul aplicarii acestei metode modelul obtinut, ca
regula, este unul neliniar (pe când avem nevoie de un model liniar). Exemple de
modelare globala sunt modelarea pe baza de retele neurale si alte tehnici de

21 Mod Coala N Document Semnat . Data
Coala UTM.2153.01.001
regresie statistica neliniara. Setul de date disponibil, corespunzând, în general,
masurarilor asupra evolutiei procesului, este utilizat în cadrul unui algoritm de
învatare pentru a determina un model care sa reflecte fidel corespondenta intrare-
iesire. Apoi, se renunta la setul de date si este pastrat doar modelul obtinut.
Algoritmii pe baza de memorare locala proceseaza setul de date, pâna la
obtinerea informatiei dorite pentru predictie sau modelare locala. Abordarea
clasic a a modelarii locale este reprezentata de metoda celui mai apropiat vecin -
„nearest neighbor method". În cadrul acestei abord ari, se construieste o bazã de
date, formata din masurarile asupra intrarilor si ie sirilor din proces, si se încearca,
prin interpolare, obtinerea unei estimari a unui nou punct de functionare, utilizând
o vecinatate a punctului curent de operare. O nouã caracteristicã a abordarii locale
o reprezinta adoptarea unor proceduri statistice pentru identificarea aproximarii
locale. Anume aceasta procedura (identificarea) se va utiliza în lucrare pentru
obtinerea aproximarilor liniare locale a motorului cu ardere interna.
Desi exista instrumente pentru aproximarea unei functii neliniare cu o
suficient de bunã precizie, tinând seama de existenta unor regiuni diferite de
operare, abordarea multimodel se poate dovedi beneficã în urmatoarele conditii:
- din datele intrare-iesire din proces, este dificilã construirea precisã a unui
model global;
- în cadrul modelarii, pot fi combinate diferite tehnici de modelare;
- în cadrul modelarii, pot fi utilizate simultan modele liniare sau neliniare;
- cunostintele apriori pot exista doar pentru anumite conditii de operare,
situatie în care vor putea fi utilizate pentru descrierea comportarii
sistemului în regiunile respective cu ajutorul unor modele mecaniciste.
Structura modelului poate fi interpretatã atât în mod calitativ în termenii
regiunilor de operare, cât si cantitativ, în termenii modelelor individuale. În cadrul

22 Mod Coala N Document Semnat . Data
Coala UTM.2153.01.001
unor regiuni diferite de operare, marimile de intrare, care sunt relevante pentru
identificarea procesului, pot fi si ele diferite. Abordarea multimodel face posibila
utilizarea unor intrari diferite pentru fiecare domeniu de operare. Aceasta
proprietate se dovedeste cu adevarat utila în cadrul proceselor multivariabile, unde
importanta variabilelor pentru identificare se modifica de la o regiune de operare la
alta. Implementarea strategiilor de conducere multimodel, în cadrul unor structuri
de conducere, este recomandatã datorita numarului redus de parametri ai
modelului.
4.1 Liniarizarea modelelor neliniare
În cazurile când avem de a face cu neliniaritati netede si ne preocupa
functionarea în vecinatatea unei traiectorii de referinta sau a unui punct de referinta
putem aproxima dinamica variatiilor în jurul acestei referinte cu un set de ecuatii
liniare.
Consideram un sistem neliniar descris ca model matematic intrare-stare-
iesire:
(4.1)
unde f este o functie continua neliniara în x si u cu derivate continui în
vecinatatea traiectoriei de referinta definita prin:
(4.2)
Pentru o astfel de traiectorie de referinta valoarea initiala si intrarea
sunt fixate. Daca ele sunt alese astfel încât pentru orice t atunci
traiectoria degenereaza într-un punct de referinta .

23 Mod Coala N Document Semnat . Data
Coala UTM.2153.01.001
Fig. 4.1 Traiectoria de referinta si traiectoria reala
De-a lungul traiectoriei reale (punctata în fig.4.1) putem gasi x cauzat de u în
dependenta de traiectoria de referinta x0 cauzat de u0 în conformitate cu:
(4.3)
Deoarece aproximarea liniara se face doar pentru variatii mici ale lui x si u
de la traiectoria de referinta , termenii de ordin superior pot fi exclusi din
descompunerea în serie Taylor a functiei f:
(4.4)
unde prin H.O.T s-au notat termenii de ordin superior.
În rezultat, devierile de la traiectoria de referinta pot fi descrise:
(4.5)
unde matricea de stare A si matricea de comanda B sunt determinate de
coeficientii termenilor liniari:

24 Mod Coala N Document Semnat . Data
Coala UTM.2153.01.001
(4.6)
(4.7)
Pentru traiectoriile de referinta generale ecuatiile liniare obtinute vor fi
variabile în timp (vari-liniare). În majoritatea cazurilor traiectoria de referinta va fi
un punct de referinta sau punct de lucru la care dorim sa stabilizam sistemul (asa
cum este aratat în fig.4.1 dreapta). Acest punct de echilibru se defineste prin:
(4.8)
unde u0 este în general un semnal de referinta constant.
Acum stabilitatea sistemului liniarizat este determinata de matricea A si în
particular de valorile proprii ale lui A care determina polii sistemului liniarizat.
Totusi, trebuie tinut cont ca acesti poli determina dinamica sistemului numai
pentru devieri mici de la punctul de referinta.
Desi liniarizarea prin descompunere în serie Taylor este pe larg utilizata, ea
totusi s-a dovedit a fi practic inaplicabila pentru modelul matematic descris în
capitolul 3, principala cauza fiind faptul ca acest model a fost conceput ca un
sistem dinamic bazat pe evenimente discrete. Se stie însa ca sistemele bazate pe
evenimente discrete nu pot fi descrise cu functii continue si derivabile (netede). De

25 Mod Coala N Document Semnat . Data
Coala UTM.2153.01.001
aceea, în continuare, pentru obtinerea modelelor locale liniare a MAI se va recurge
la urmatoarele proceduri: lin iarizarea statica a modelului neliniar si identificarea
liniara a modelului neliniar la diferite valori a semnalului de intrare.
4.2 Liniarizarea statica
Ca si majoritatea obiectelor de reglare, MAI au o comportare neliniara atâ t
în regim dinamic cât si în regim static. Din punctul de vedere al regimului static,
aceasta înseamna ca factorul de amplificare a procesului se schimba în functie de
semnalul de intrare (iesirea regulatorului). Fara liniarizare (statica), regulatorul va
trebui acordat pentru regimul în care factorul de amplificare este maximal [5].
Aceasta rezulta într-o acordare necorespunzatoare pentru alte regimuri de
functionare a motorului si poate duce la marirea timpului de reglare sau cresterea
excesiva a suprareglajului. Liniarizarea statica a sistemului va îmbunatati calitatea
reglarii datorita faptului ca regulatorul va fi acordat pentru întregul interval de
functionare. Pentru a realiza acest lucru în sistem se introduce un bloc de
liniarizare statica (BLS), numit în literatura de limba engleza si characterizer.
Un BLS primeste semnalul de iesire a regulatorului si îl transforma într-o
valoare astfel încât sistemul sa devina liniar pe întregul domeniu de comanda.
Pentru a compensa caracteristica statica neliniara a motorului este necesar ca BLS
sa imita o caracteristica neliniara inversa celei a motorului. Adica daca MAI are o
caracteristica descrisa de functia f, atunci BLS-ului i se va impune o caracteristica
f -1.
În continuare sunt enumerati pasii efectuati la construirea unui bloc de
liniarizare statica.
1. Se colecteaza date intrare -iesire la diferite regimuri de functionare, adica se
ridica caracteristica statica a obiectului, în cazul nostru a modelului
neliniar al MAI (fig.4.2).

26 Mod Coala N Document Semnat . Data
Coala UTM.2153.01.001
Fig. 4.2 Schema pentru colectarea datelor intrare-iesire
2. Se memoreaza datele de intrare si iesire în spatiul de lucru al Matlab sub
denumirile X si Y respectiv.
3. Se studiaza caracteristica obtinuta. Pentru afisarea graficului se utilizeaza
functia Matlab plot(x,y)
Fig. 4.3 Caracteristica statica a MAI

27 Mod Coala N Document Semnat . Data
Coala UTM.2153.01.001
4. Se alege tipul de interpolare: liniar sau hiperbolic(polinomial). Întrucât este
mai simpla în implementare s-a ales interpolarea liniara.
5. Se genereaza caracteristica impusa BLS. Întrucât caracteristica statica a
motorului are urmatoarea descriere matematica f: X ? Y, atunci
caracteristica ce compenseaza neliniaritatea va fi descrisa de functia
f -1: Y ? X. Pentru a vedea caracteristica BLS, iarasi utilizam functia plot
plot(y,x).
Fig. 4.4 Caracteristica impusa blocului de liniarizare statica
6. Se introduce blocul Look-Up Table ce îndeplineste functia unui BLS asa
cum este aratat în fig.4.5. Caracteristica statica rezultanta este aratata în
fig.4.6.

28 Mod Coala N Document Semnat . Data
Coala UTM.2153.01.001
Fig. 4.5 Linia rizarea caracteristicii statice a motorului prin introducerea unui BLS
realizat ca bloc Simulink Look-Up Table
Fig. 4.6 Caracteristica statica rezultanta
4.3 Identificare a parametrica
Dupa cum s-a aratat în paragraful 4.1 liniarizarea clasica utilizând
descompunerea în serie Taylor nu este aplicabila pentru modele simulate ca
sisteme cu evenimente discrete. O metoda simpla si rapida de obtinere a
aproximarii liniare a unui model neliniar este utilizarea procedurii de identificare.
Identificarea este o procedura matematica ce ne permite sa construim
modelul sistemului dinamic bazându-ne pe semnalele masurate. De cele mai multe
ori identificarea (parametrica) reprezinta o procedura de optimizare. Sa analizam
mai detaliat problema identificarii sistemului.

29 Mod Coala N Document Semnat . Data
Coala UTM.2153.01.001
Fig. 4.5 Reprezentarea intrare -iesire a unui sistem
Configuratia generala intrare-iesire este aratata în fig.4.2 de mai sus.
Considerând perioada de discretizare egala cu unu, avem semnalul de intrare
si semnal de iesire
Având în vedere faptul ca semnalul de iesire este generat în baza semnalului
de intrare de catre un sistem liniar, relatia între semnale poate fi scrisa:
(4.9)
unde q este operatorul de avans si G(q)u(t) este reprezentarea prescurtata
(4.10)
si
(4.11)
Numerele {g(k)} sunt numite raspunsul la impuls al sistemului. Este evident
ca g(k) este iesirea sistemului la pasul k daca intrarea este un impuls unitar la pasul
zero. Functia G(k) se numeste functia de transfer a sistemului. Evaluând aceasta
functie pe cercul unitar (q=e jw) se obtine functia frecventiala

30 Mod Coala N Document Semnat . Data
Coala UTM.2153.01.001
(4.12)
În ecuatia (4.9) v(t) reprezinta un semnal perturbator (zgomot) nemasurabil.
P roprietatile lui pot fi exprimate în termenii spectrului sau (de putere)
(4.13)
care este definit prin
(4.14)
unde Rv(t) este functia de corelatie a semnalului v(t)
(4.15)
si E denota asteptarea mate matica a semnalului.
Alternativ, perturbatia v(t) poate fi descrisa zgomot alb filtrat
(4.16)
unde e(t) este zgomot alb cu dispersia si
(4.17)
Ecuatiile (4.9) si (4.16) definesc reprezentarea în domeniul timpului a
sistemului
(4.18)
unde G este fu nctia de transfer a sistemului.
Ecuatiile (4.12) si (4.13) constituie reprezentarea în domeniul frecventei
(4.19)
Raspunsul la impuls (4.11) si descrierea în domeniul frecventei (4.19) sunt
numite modele nonparametrice , deoarece ele nu sunt definite printr-un numar finit

31 Mod Coala N Document Semnat . Data
Coala UTM.2153.01.001
de parametri. Descrierea (4.18) reprezinta un model parametric si va fi utilizata în
continuare la identificare.
Fiind data reprezentarea (4.18) si fiind culese datele intrare-iesire u, y,
erorile (de predictie) e(t) în (4.18) pot fi calculate ca
(4.20)
Aceste erori sunt functii de G si H, care la rândul lor sunt parametrizate prin
polinoame (coeficientii polinoamelor) sau reprezentari în spatiul starilor (matrice).
Cea mai utilizata metoda de identificare parametrica este determinarea estimarilor
lui G si H prin minimizarea
(4.21)
adica
(4.22)
Aceasta metoda este numita metoda erorii de predictie. Pentru perturbatii
Gaussiene ea coincide cu metoda MLE (Maximum Likelihood Estimator).
Utilizând descrierea cu ecuatii de stare functiile de transfer G si H sunt
parametrizate astfel
(4.23)
unde Inx este matricea unitate cu dimensiunile nx pe nx.
si
(4.24)
unde ny este dimensiunea lui y(t) si e(t)

32 Mod Coala N Document Semnat . Data
Coala UTM.2153.01.001
Sistemul (modelul) este descris prin urmatoarele ecuatii de stare
(4.25)
În afara de modele ISI (Intrare-Stare-Iesire), la identificare se mai utilizeaza
urmatoarele modele:
1. ARX
2. Output-Error (OE)
3. ARMAX
4. FIR (Finite Impulse Response)
5. Box-Jenkins (BJ)
Modelul ARX nu reprezinta altceva decât ecuatii de diferenta (cu operator q).
Modelele 2 – 5 sunt niste variatii a modelului ARX ce permit de asemenea
caracterizarea proprietatilor perturbatiei e.
S-a luat decizia de utilizare a modelelor ISI în special datorita simplitatii de
utilizare a lor. Variabila esentiala de structura reprezinta doar un scalar: ordinul
modelului. Aceasta ne genereaza doar o singura necunoscuta la cautarea descrierii
convenabile a modelului.
În descrierea ISI din (4.25) matricea K determina proprietatile perturbatiei. La
procedura de identificare se va utiliza K=0, astfel încât sursa de zgomot va afecta
doar iesirea si nu va fi construit un model specific al proprietatilor zgomotului.
Aceasta corespunde cu H=1 în (4.18) si este mentionat de obicei ca model Output-
Error.
4.4 Identificarea modelului la diverse valori a turatiilor
Pentru a întelege necesitatea identificarii la diferite regimuri de functionare
si obtinerea mai multor modele în locul unui singur trebuie sa vedem comportarea
MAI la turatii joase si la turatii înalte. Dupa cum se vede din fig.4.6. la turatii joase

33 Mod Coala N Document Semnat . Data
Coala UTM.2153.01.001
procesul tranzitoriu are un caracter oscilant (fiind prezent suprareglajul). La turatii
înalte însa, comportarea motorului se schimba esential. Din fig.4.7. se vede ca
procesul tranzitoriu devine aperiodic. Aceasta ne demonstreaza ca motorul are o
comportare neliniara nu numai în regim static, dar si în regim dinamic.
Fig. 4.6 Procesul tranzitoriu al MAI la turatii joase
Fig. 4.7 Procesul tranzitoriu al MAI la turatii înalte
Pentru a descrie cât mai precis functionarea motorului în diferite regimuri, în
continuare, se vor identifica 5 modele liniare corespunzatoare urmatoarelor
regimuri:
1. Turatii foarte joase, 1000 – 1500 rpm (rotatii pe minut)
2. Turatii joase, 1500 – 2000 rpm
3. Turatii normale, 2000 – 3000 rpm
4. Turatii înalte, 3000 – 5500 rpm
5. Turatii foarte înalte, 5500 – 8000 rpm

34 Mod Coala N Document Semnat . Data
Coala UTM.2153.01.001
Pentru identificare s-a utilizat System Identification Toolbox din componenta
MATLAB 6.5. Interfata aplicatiei ident este aratata în fig. 4.8. Pentru a începe
procesul de identificare, aplicatia are nevoie de setul de date intrare-iesire, care au
fost culese anterior pentru fiecare din cele 5 regimuri de functionare. Secventa de
semnale intrare-iesire folosita pentru identificarea motorului la turatii foarte joase
este prezentata în fig. 4.9.
Fig. 4.8 Mediul de identificare a sistemelor ident
Fig. 4.9 Semnalul de intrare (punctat) si de iesire utilizate la identificare

35 Mod Coala N Document Semnat . Data
Coala UTM.2153.01.001
Aplicatia ident ofera posibilitatea utilizarii diferitor tipuri de identificare.
Dupa cum s-a mentionat în paragraful precedent, în cazul nostru se va utiliza
identificarea parametrica. Pentru aceasta în meniul Estimate se alege punctul
Parametric Models. În rezultat apare fereastra aratata în fig. 4.10. Aici iarasi, dupa
cum s-a discutat în paragraful precedent, în calitate de model pentru identificare se
alege modelul intrare-stare-iesire (state space). De asemenea trebuie ales ordinul
modelului. Aplicatia ident are posibilitatea de a estima ordinul modelului ce va fi
cel mai potrivit pentru modelarea legaturii între datele de intrare si iesire primite.
Dupa cum se vede din fig. 4.11 ordinul recomandat pentru datele intrare-iesire
culese la turatii foarte joase este patru. Acest ordin este optimal pentru majoritatea
regimurilor. De aceea, pentru a pastra claritatea, pentru toate cele 5 regimuri, la
identificare se va alege ordinul patru.
Dupa executarea identificarii propriu -zise modelul obtinut se verifica, se
compara iesirea modelului liniar estimat cu cea reala si se ia decizia privind
pastrarea modelului curent obtinut sau repetarea procedurii de identificare
modificând careva parametri (de exemplu, ordinul modelului).
Fig. 4.10 Alegerea structurii si ordinului modelului

36 Mod Coala N Document Semnat . Data
Coala UTM.2153.01.001
Fig. 4.11 Estimarea ordinului optimal a modelului
Modele obtinute în urma identificarii sunt discrete, fiind descrise de
urmatoarele ecuatii:
x(t+Ts) = A x(t) + B u(t) + K e(t)
y(t) = C x(t) + D u(t) + e(t) (4.26)
unde Ts=0.1
Ts – perioada de discretizare
Întrucât K=0 si D=0 , si netinând cont de zgomotul e(t) vom avea:
x(t+Ts) = A x(t) + B u(t)
y(t) = C x(t) (4.27)
Asadar modelul obtinut va fi determinat de tripletul (A,B,C). În continuare
vor fi prezentate tripletele obtinute în urma identificarii celor 5 regimuri de
functionare a motorului cu ardere interna.

37 Mod Coala N Document Semnat . Data
Coala UTM.2153.01.001
1) Modelul MAI la turatii foarte joase, 1000 – 1500 rpm
0.94901 0.19506 -0.0060046 -0.0037912
A = -0.3026 0.77663 -0.069597 0.0018493
0.065443 0.46367 0.010224 0.11528
-0.0014813 -0.069659 -0.29713 0.8867
-0.25261 B = 0.61474
0.90962
0.79658
C = 0.85602 0.41554 -0.025198 -0.01485
D = 0 K = 0
2) Modelul MAI la turatii joase, 1500 – 2000 rpm
0.94373 -0.20212 0.0042757 -0.00070202
A = 0.32897 0.62849 -0.057761 0.010535
-0.016689 0.48652 -0.36981 0.068277
0.00036406 0.015875 0.084581 0.99318
0.31443
B = 1.0295
3.4563
-0.29628
C = -0.83589 0.32577 -0.013783 0.016756
D = 0 K = 0

38 Mod Coala N Document Semnat . Data
Coala UTM.2153.01.001
3) Modelul MAI la turatii normale, 2000 – 3000 rpm
0.91181 -0.13451 -0.00092016 -0.00010986
A = 0.40316 0.46161 -0.044575 -0.035594
0.018701 -0.20746 0.67599 -0.67316
-0.0061304 0.084961 0.3028 0.13832
-0.082045 B = -0.65755
-0.23904
0.17222
C = 1.7748 -0.27854 0.012733 0.00016272
D = 0 K = 0
4) Modelul MAI la turatii înalte, 3000 – 5500 rpm
0.89299 0.070098 -7.3165e-005 -0.00055149
A = -0.44341 0.19705 -0.11814 0.069105
-0.013482 -0.28067 0.68604 0.46766
3.4475e-005 -0.00093659 -0.0024786 0.97515
-0.0049045
B = 0.3856
0.10719
0.00047369
C = 4.6558 0.22591 -0.022075 0.01229
D = 0 K = 0

39 Mod Coala N Document Semnat . Data
Coala UTM.2153.01.001
5) Modelul MAI la turatii foarte înalte, 5500 – 8000 rpm
0.86212 0.028798 -0.0010702 0.00081743
A = -0.50244 0.050845 -0.097648 0.063133
-0.0061123 -0.29345 0.68281 0.52149
-2.6371e-005 -0.003679 -0.010692 0.89362
0.020121 B = 0.46867
0.11452
0.0015596
C = 4.4184 0.0287 -0.010096 0.00013628
D = 0 K = 0
Pentru a verifica calitatea identificarii sa comparam semnalul de iesire initial
cu semnalul de iesire al modelului obtinut (comparatia se face pentru regimul de
turatii foarte joase). În fig. 4.12 cele doua semnale, practic, nu pot fi distinse. Deci,
modelul liniar estimat aproximeaza foarte precis comportarea celui neliniar pe
aceasta portiune a regimului de functionare.
Fig. 4.12 Iesirea masurata si iesirea modelului liniar

40 Mod Coala N Document Semnat . Data
Coala UTM.2153.01.001
5. PROIECTAREA REGULATORULUI NUMERIC
Regulatorul automat are rolul de a prelucra operational semnalul de eroare ,
obtinut in urma comparatiei liniar-aditive a marimii de intrare si a marimii de
reactie în elementul de compara tie, si de a da la iesire un semnal de comanda
pentru elementul de executie.
Informatiile curente asupra procesului automatizat se obtin cu ajutorul
traductorului de reactie si sunt prelucrate de regulatorul automat in conformitate cu
o anumita lege care defineste algoritmul de reglare automata. Algoritmii de reglare
(legile de reglare) conventionali utilizati în mod curent in reglarea proceselor
automatizate (tehnologice) sunt de tip proportional - integral - derivativ (PID).
Implementarea unei anumite legi de reglare se poate realiza printr-o varietate
destul de larga a constructiei regulatorului, ca regulator electronic, pneumatic,
hidraulic sau mixt.
Totusi odata cu dezvoltarea microprocesoarelor si a microcontrolerelor a
devenit foarte convenabila utilizarea regulatoarelor numerice. Implementarea
regulatorului în forma de program reprezinta o cale optimala pentru elaborarea
unui sistem performant si robust.
Sistemele de reglare numerica, a caror dezvoltare a cunoscut o evolu tie rapida
sunt caracterizate prin:
– viteza si precizie de prelucrare a informatiei ridicate;
– posibilitatea utilizarii unor algoritmi de reglare conventionali si evoluati
usor de implementat pe cale numerica;
– posibilitatea memorarii informatiilor pe durata nelimitata fara alterarea
continutului acestora;
– posibilitatea multiplexarii semnalelor;
– siguranta in functionare ridicata.

41 Mod Coala N Document Semnat . Data
Coala UTM.2153.01.001
5.1 Reglarea multimode
Metodele pentru analiza si sinteza sistemelor neliniare (asa cum este motorul
cu ardere interna) nu sunt suficient comode. Pe de alta parte, metodele elaborate
pentru sistemele liniare sunt bine cunoscute si cu ele s-a acumulat destula
experienta. De aceea, este atractiv de a adopta o strategie “divide et empera”
(împarte si stapâneste), astfel încât sarcina de analiza sau sinteza a unui sistem
neliniar sa fie descompusa într-un numar de sarcini de analiza sau sinteza a
sistemelor liniare.
Reglarea multimode consta în proiectarea (sinteza) mai multor regulatoare
pentru un obiect ce are caracteristici dinamice diferite în diferite regimuri de
functionare. Pentru aceasta se face aproximarea liniara a obiectului reglat pentru un
numar de regimuri de functionare si se sintetizeaza câte un regulator pentru fiecare
regim.
Având în vedere cele spuse, etapele proiectarii unui regulator multimode sunt:
1. Se liniarizeaza obiectul neliniar pentru un numar de regimuri de
functionare
2. Se sintetizeaza un regulator pentru fiecare aproximare liniara (pentru
fiecare regim de functionare)
3. Se combina regulatoarele liniare pentru a obtine în rezultat regulatorul
neliniar.
La etapa a treia se proiecteaza o unitate de supervizare care comuta
regulatoarele în dependenta de starea actuala a obiectului.
5.2 Acordarea regulatoarelor la modelele liniare
Initial pentru acordarea regulatoarelor s-a încercat utilizarea metodei Ziegler-
Nichols. Datorita simplitatii sale aceasta metoda este pe larg utilizata la acordarea

42 Mod Coala N Document Semnat . Data
Coala UTM.2153.01.001
regulatoarelor. În fig. 5.1 este aratat regimul de oscilatii întretinute din care au fost
determinati parametrii:
Kcr = 7.1
Tcr = 0.75 s
Fig. 5.1 Regimul de oscilatii întretinute
Din parametrii procesului oscilant din fig.5.1 se determina coeficientii KP, KI,
KD ai regulatorului PID:
KP = 0.75*Kcr = 5.32
KI = 1/(0.6* Tcr) = 1/0.45 = 2.22
KD = 0.1*Tcr = 0.075 (5.1)
Se testeaza sistemul cu regulator PID cu parametrii din ecuatiile (5.1). În
fig.5.2 este aratat procesul tranzitoriu al sistemului. Dupa cum putem observa
procesul are un suprareglaj de peste 50% si un timp de reglare mare. În general,
suprareglajul este un fenomen inacceptabil la reglarea turatiilor motorului cu

43 Mod Coala N Document Semnat . Data
Coala UTM.2153.01.001
ardere interna. De aici se poate trage concluzia ca în cazul dat utilizarea metodei
Ziegler-Nichols pentru acordarea regulatorului PID nu este rezonabila.
Fig. 5.2 Procesul tranzitoriu al sistemului cu regulator PID acordat dupa ZN
Reiesind din imposibilitatea utilizarii metodei Ziegler-Nichols s-a recurs la
metodele de optimizare parametrica. În MATLAB 6.5 aceste functii sunt
implementate de Nonlinear Control Design Blockset (NCDB). La utilizarea NCDB
procesului tranzitoriu i se pot impune unele limite (superioare si inferioare).
Aceasta este foarte convenabil în special pentru evitarea suprareglajului, lucru care
se poate face prin impunerea limitei superioare egale cu unu.
NCDB transforma limitarile impuse si iesirea sistemului simulat într-o
problema de optimiz are de forma:
(5.2)
unde
x – vectorul parametrilor de acordare, în cazul nostru x = [Kp Ki Kd]
xl – vectorul limitelor inferioare a parametrilor de acordare

44 Mod Coala N Document Semnat . Data
Coala UTM.2153.01.001
xu – vectorul limitelor superioare a parametrilor de acordare
g(x) – vectorul erorilor
w – ponderea limitarilor superioare si inferioare
? – scalar ce introduce un element de elasticitate în problema de optimizare
În esenta, NCDB încearca sa minimizeze eroarea maxima. NCDB genereaza
valorile erorilor la intervale egale de timp (intervalul se defineste de catre
Discretization Interval în dialogul Tunable Parameters) începând cu startul
timpului de simulare si terminând cu stopul timpului de simulare. Pentru limitele
superioare, eroarea este definita ca diferenta între limita si iesirea simulata. Pentru
limitele inferioare, eroarea este definita ca diferenta între iesirea simulata si limita.
Acest tip de probleme de optimizare este solutionat de rutina (functia) constr
al Optimization Toolbox. Functia data utilizeaza metoda Sequential Quadratic
Programming (SQP) ce rezolva o problema de programare patratica la fiecare
iteratie.
Fig. 5.3 Schema de acordare a regulatorului PID utilizând optimizarea parametrica
În fig.5.3 este prezentata schema utilizata pentru acordarea regulatorului.
Blocul numit NCD Outport este cel care se ocupa de optimizarea procesului
tranzitoriu. Dupa cum se vede din schema coeficientii Kp, Ki, Kd nu sunt introduse
ca valori numerice, ci ca variabile. Deasemenea aceste variabile sunt mentionate în
blocul NCD Outport ca parametri de optimizare. La apasarea butonului Start

45 Mod Coala N Document Semnat . Data
Coala UTM.2153.01.001
începe procedura de optimizare, iar în acelasi timp pe ecran se afiseaza procesul
tranzitoriu calculat, fig.5.4. La finalul optimizarii sunt afisati parametrii de acord
calculati.
Fig. 5.4 P rocedura de optimizare a procesului tranzitoriu
Procedura de optimizare a fost efectuata pentru toate cele 5 modele liniare. În
rezultat s-au obtinut 5 regulatoare PID – câte unul pentru fiecare regim de lucru al
motorului. În continuare sunt prezentati parametrii de acord ai regulatorului în
dependenta de turatiile motorului:
1) Turatii foarte joase, 1000 – 1500 rpm
Kp = 4.7649;
Ki = 3.9000;
Kd = 0.8946;
2) Turatii joase, 1500 – 2000 rpm
Kp = 11.4438;

46 Mod Coala N Document Semnat . Data
Coala UTM.2153.01.001
Ki = 5.5691;
Kd = 1.5779;
3) Turatii normale, 2000 – 3000 rpm
Kp = 11.5641;
Ki = 5.9108;
Kd = 1.3894;
4) Turatii înalte, 3000 – 5500 rpm
Kp = 12.0288;
Ki = 5.9728;
Kd = 1.2402;
5) Turatii foarte înalte, 5500 – 8000 rpm
Kp = 11.8835;
Ki = 6.7920;
Kd = 1.0466;
5.3 Proiectarea unitatii de supervizare
Dupa cum s-a aratat în paragraful precedent, pentru a obtine o reglare
optimala din punctul de vedere al criteriului (5.2), parametrii de acord ai
regulatorului PID trebuie modificati „online” în dependenta de valoarea curenta a
turatiilor motorului. De aici apare necesitatea proiectarii unei unitati de supervizare
care ar modifica parametrii regulatorului în timpul functionarii.
În fig.5.5 este prezentata grafic dependenta parametrilor de acord de turatii. Se
vede însa ca datorita împartirii discrete pe 5 regimuri, la granita între regimuri apar
salturi bruste ale parametrilor. Acest fapt nu este logic pentru ca comportarea
motorului nu se schimba brusc, ci are loc o modificare lenta a caracteristicilor sale.
De aceea este normal ca si parametrii de acord ai regulatorului sa aiba o modificare
lenta.

47 Mod Coala N Document Semnat . Data
Coala UTM.2153.01.001
Fig. 5.5 Modificarea parametrilor de acord în dependenta de turatiile motorului
(sus – Kp, mijloc – Ki, jos – Kd)
Fig. 5.6 Rezultatul interpolarii liniare a dependentelor Kp(N), Ki(N), Kd(N)
(sus – Kp, mijloc – Ki, jos – Kd)

48 Mod Coala N Document Semnat . Data
Coala UTM.2153.01.001
Pentru a obtine o dependenta în care sa aiba loc o modificare lenta a
parametrilor, vom folosi interpolarea polinomiala. Si întrucât forma curbei obtinute
nu are prea mare importanta vom utiliza cea mai simpla interpolare polinomiala –
interpolarea liniara (cu polinoame de ordinul unu). În fig.5.6 este aratat rezultatul
interpolarii liniare a dependentelor Kp(N), Ki(N), Kd(N), unde N – turatiile
motorului [103 rot./min.].
Astfel, unitatea de supervizare va avea o intrare – viteza motorului – si trei
iesiri – cei trei parametri de acord Kp, Ki, Kd. Aceste 3 semnale de iesire se
furnizeaza regulatorului pentru înmultire cu semnalele regulatorului: E
(proportional), E/s (integrator), sE (derivativ). Modul de conectare a unitatii de
supervizare la regulator este prezentata în fig.5.7.
Fig. 5.7 Schema sistemului de reglare a turatiilor motorului.
Unitatea de supervizare la rândul ei este constituita din subunitati. Pentru
implementarea unitatii de supervizare se utilizeaza trei blocuri Look-Up Table, care
au si functia de interpolatoare de ordinul unu. În fiecare din aceste trei blocuri se

49 Mod Coala N Document Semnat . Data
Coala UTM.2153.01.001
introduc valorile turatiilor si valorile corespunzatoare ale parametrului de acord.
Structura interna a unitatii de supervizare este prezentata în fig.5.8.
O posibilitate de implementare a unitatii de supervizare este utilizarea unui
FIS (Fuzzy Inference System – sistem de inferenta fuzzy). Avantajul utilizarii sale
este trecerea lenta de la un regim la altul ce apare în mod natural datorita
proprietatilor sistemelor fuzzy. Cu toate acestea, utilizarea lor în cadrul sistemului
dat nu a fost testata si reprezinta doar o eventuala extindere.
Fig. 5.8 Structura interna a unitatii de supervizare
Este de mentionat faptul ca, în cuplu cu unitatea de supervizare, regulatorul
P ID, initial liniar, devine neliniar. Acest fapt se datoreaza, în primul rând,
introducerii dependentelor neliniare a parametrilor de acord de turatiile motorului
(blocurile Look-Up Table). Un alt motiv este utilizarea operatiei de înmultire care
este o operatie neliniara. Astfel, se adevereste axioma care spune ca comanda
obiectelor neliniare se face cu regulatoare neliniare.

50 Mod Coala N Document Semnat . Data
Coala UTM.2153.01.001
6. SIMULAREA PE CALCULATOR
Simularea este acel instrument care ne permite de a observa functionarea
sistemului automat proiectat oricât de complex (sau dimpotriva, simplu) n-ar fi el.
Pentru rezolvarea ecuatiilor diferentiale ce apar la simularea obiectelor si
proceselor dinamice s-au utilizat doua tipuri de metode numerice: cu pas fixat si cu
pas variabil. Din categoria metodelor cu pas fixat a fost utilizata metoda Runge-
Kutta, iar din categoria celor cu pas variabil – metoda Dormand-Prince.
În urmatoarele paragrafe vor fi prezentate rezultatele simularii sistemului
automat în mediul Simulink. De asemenea se vor aprecia rezultatele obtinute prin
comparatia cu un regulator liniar propus în [2].
6.1 Simularea pe calculator a sistemului automat
Pentru a observa comportarea motorului cu ardere interna sub comanda
regulatorului PID numeric cu parametri variabili se va simula raspunsul sistemului
la semnal treapta cu ? = +500 rot./min. Schimbarea valorii impuse a turatiilor se va
face pentru trei valori initiale 1500, 2500 si 3500 rot./min. Analiza raspunsurilor la
diferite valori a turatiilor este necesara pentru a demonstra ca datorita variatiei
corespunzatoare a parametrilor de acord a regulatorului, neliniaritatea dinamica a
motorului este compensata si raspunsurile sunt aceleasi independent de valoarea
turatiilor. Schema de simulare a sistemului automat este prezentata în fig. 5.7 a
capitolului precedent
Totodata, pentru a demonstra avantajele reglarii multimode (cu variatie a
parametrilor), se va simula acelasi sistem, însa cu regulator PID clasic [2].
Simularea se va face la aceleasi conditii, adica semnalul de referinta va fi modificat
cu ? = +500 rot./min, iar valorile initiale a turatiilor vor fi 1500, 2500 si 3500
rot./min.
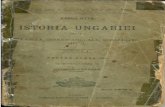
Rezultatele simularilor sunt prezentate în fig. 6.1 sub forma de tabel. În
coloana din stânga sunt aratate rezultatele simularii sistemului automat cu regulator

51 Mod Coala N Document Semnat . Data
Coala UTM.2153.01.001
Regulator PID liniar Regulatorul proiectat
Fig. 6.1 Comparatia raspunsului tranzitoriu al motorului cu ardere interna la
diferite turatii sub comanda regulatorului proiectat si sub comanda
unui regulator PID liniar
PID liniar (clasic), iar în coloana din dreapta – cu regulator PID cu parametri
variabili. În cele trei rânduri ale tabelului sunt prezentate procesele tranzitorii
pentru diferite valori initiale a turatiilor.

52 Mod Coala N Document Semnat . Data
Coala UTM.2153.01.001
Regulator PID liniar Regulatorul proiectat
Fig. 6.2 Comparatia raspunsului la perturbatie (5Nm) al motorului cu ardere
interna la diferite turatii sub comanda regulatorului proiectat si sub
comanda unui regulator PID liniar
În fig. 6.2 se face comparatia raspunsurilor la perturbatie a sistemelor automate cu
regulator PID liniar si, respectiv, cu regulator PID cu parametri variabili.
Simularea se face pentru 3 valori initiale a turatiilor: 1500, 2500 si 3500 rot./min.

53 Mod Coala N Document Semnat . Data
Coala UTM.2153.01.001
Fizic, perturbatia este variatia cuplului sarcinii aplicate la axul motorului. La
simulare, perturbatia este reprezentata de un semnal treapta p(t), cu saltul ?p = +5
Nm ce apare la momentul de timp t = 20 s.
6.2 Aprecierea rezultatelor obtinute
Analiza proceselor tranzitorii din fig.6.1 arata ca regulatorul proiectat în
aceasta lucrare demonstreaza performante uniforme pentru toate regimurile de
functionare, pe când sistemul automat cu regulator PID liniar are comportari
diferite la diferite valori a turatiilor. Cea mai mare diferenta poate fi observata în
regimul de functionare la turatii joase, regim care este foarte important pentru ca la
functionare în gol turatiile motorului de obicei nu depasesc 2000 rot./min. Astfel se
poate vedea ca în acest regim cu regulator PID liniar se obtin oscilatii (suprareglaj)
si un timp de reglare mare. În acelasi timp, acceptând o eroare de 5%, timpul de
reglare al regulatorului proiectat nu depaseste 0.5 s.
Un avantaj important al regulatorului proiectat este si imunitatea foarte buna
la perturbatii. Din fig.6.2 se poate observa ca în cazul regulatorului PID clasic, sub
actiunea unei perturbatii de 5 Nm (care apare la punerea în functiune a
climatizorului), turatiile motorului scad cu aproape 100 rot./min. Aceasta scadere
este destul de mare si la turatii joase poate duce la oprirea nedorita a motorului. Pe
de alta parte, regulatorul PID cu parametri variabili asigura o imunitate foarte buna
la perturbatii. Dupa cum se poate observa din aceeasi fig.6.2, turatiile scad cu mai
putin de 20 rot./min. si apoi revin lent la valoarea sa initiala.

54 Mod Coala N Document Semnat . Data
Coala UTM.2153.01.001
CONCLUZII
Obiectivul acestei lucrari a fost de proiecta un regulator care sa mentina
turatiile unui motor cu ardere interna la acelasi nivel independent de variatiile în
sarcina. Proiectarea regulatorului s-a facut utilizând un model validat al motorului
cu ardere interna, care este o reprezentare fenomenolo gica de frecvente joase a
unui motor de patru cilindri.
Regulatorul proiectat este utilizabil pentru doua situatii:
- idle control (stabilizarea turatiilor în regim de functionare în gol)
- cruise control (pastrarea vitezei constante a autovehiculului pe
automagistrale)
Motorul cu ardere interna demonstreaza o comportare neliniara atât în regim
static, cât si în regim dinamic. Pentru a compensa neliniaritatea statica s-a utilizat
un bloc de liniarizare statica cu o caracteristica inversa celei a motorului. Pentru a
elimina neliniaritatea dinamica s-a recurs la obtinerea a cinci aproximatii liniare
pentru diferite regimuri de functionare. Acest fapt a permis utilizarea metodelor de
analiza si sinteza destinate sistemelor liniare si, ca rezultat, a facilitat proiectarea
regulatorului.
Regulatorul proiectat în aceasta lucrare este un regulator PID cu parametri de
acord variabili si poate fi numit si regulator P ID cu auto-acordare. Modificarea
parametrilor regulatorului în timpul functionarii sistemului ne-a permis adaptarea
algoritmului de reglare la comportarea neomogena a motorului cu ardere interna la
diferite turatii. Datorita acestei abordari, au fost obtinute performante superioare
unui regulator PID clasic (cu parametri constanti).
În continuare sunt enumerate principalele caracteristici ale regulatorului
proiectat:
- Un timp de reglare sub 0.5 s
- Lipsa suprareglajului atât la turatii înalte cât si la turatii joase

55 Mod Coala N Document Semnat . Data
Coala UTM.2153.01.001
- O imunitate foarte buna la perturbatii (valoara turatiilor se schimba cu
mai putin de 20 rot./min.)
- Comportare omogena a sistemului automat în toate regimurile de
functionare

56 Mod Coala N Document Semnat . Data
Coala UTM.2153.01.001
BIBLIOGRAFIE
1. Petter Strandh
Combustion Engine Models for Hybrid Vehicle System Development. – Lund:
Lund Institute of Technology, 2002. – 114 p.
2. Using Simulink and Stateflow in automotive applications. – The Mathworks
Corporation.
3. Diana Yanakiev, Ioannis Kanellakopoulos
Engine and Transmission Modeling for Heavy-Duty Vehicles. – California:
University of California , 1995. – 64 p.
4. Ad Damen
Modern Control Theory. – Eindhoven: Eindhoven University of Technology,
2002. – 163 p.
5. http://www.expertune.com/characterizer.html - articol ce descrie realizarea
practica a liniarizarii statice
6. Lennart Ljung
System Identification Toolbox User’s Guide. – The MathWorks, Inc., 2001. –
366 p.
7. Karl Johan Åström
Control System Design. – Santa Barbara: University of California, 2002. – 333
p.

57 Mod Coala N Document Semnat . Data
Coala UTM.2153.01.001
8. Mihail Voicu
Introducere în automatica. – Iasi: Polirom, 2002. – 280 p.