Roboti Industriali - Proiect de Diploma

If you can't read please download the document
Transcript of Roboti Industriali - Proiect de Diploma
PROIECT DE DIPLOM 1 1.STADIUL ACTUAL AL ROBOILOR INDUSTRIALI 1.1. Scurt istoric Osocietateindustrializatavansatpresupuneoautomatizareflexibilaproceselorproductive, n care manipulatoarelei roboii industriali au un rol determinant. Avnd n vederec roboii industriali sunt flexibili, asigurnd libertide micare similarecu aceleaale membrelorsuperioare(brat-mna)alefiinelorumane,utilizarealorproduceoseriedeavantaje economiceisociale.ntreacesteapotfimenionate:cretereaproductivitii,umanizareavieii muncitorilor,prevenireaaccidentelordemunc,ridicareacalitiiproduselorirecuperareamai rapid a investiiilor.Creareaunormijloacedeautomatizaredetipulmanipulatoareloriroboilorafost determint, printre altele, de creterea nomenclaturii pieselor produse i de reducerea cotei relative a produciilor de mas i de serie mare datorit produciei de unicate i deserie mic. Automatizarea supl,reprezentndcelmainaltnivelalautomatizriiprogramabile,seorganizeazpentru producia discretn loturi, n celule de fabricaie controlate i conduse de calculator i deservite de unul sau mai muli roboi industriali.S-aajunsastfel,prinintroducereamanipulatoareloriaroboilorindustriali,la transformarea sistemelor de producie de la sisteme om-main la sisteme om-robot-main. Aceast transformare conduce la eliberarea muncitorilor de la prestarea unor munci periculoase sau lipsite de confort.Robotulindustrialfolositnproceseledefabricaieesteunnlocuitoralomului,putnd nlocui, la actualul nivel tehnologic, funciile minilor, fiind incapabil s aib picioare. Cuvntul ,,robot are astzi aproape un secol de via aprndpentru prima dat n piesa R.U.R.(Robotul Universal al lui Rossum), scris de ctre un dramaturg ceh. Karel i folosit pe plan internaional din anul 1923, cnd lucrarea menionata a fost tradus n limba englez. Termenul de robotic a fost inventat de Isaac Asimov, unul din marii scriitori de PROIECT DE DIPLOM 2 literaturetiinifico-fantastic.Acestscriitorautilizatpentruprimadatcuvntul,,roboticn anul1942,npovestireaRunaround,ncarestabiletedelanceput,,celetreiprincipiialeunui robot. Aceste trei principii, enunate de ctre Asimov, sunt : -Un robot nu poate leza o fiin uman sau nu poate asista inactiv la o primejdie n care este implicat o fiin uman ; -Unrobottrebuiessesupuncomenzilordateluidectrefiineleumane,cuexcepia acelora care nu respect primul principiu ; -Un robot trebuies se protejeze pe sine nsui de la vtmri, cu excepia cazurilor n care s-ar nclca primele dou principii ; n prezent, prin alturarea adjectivului ,,industrial, noul termen ,,robot industrial are o semnificaie foarte bine definit in limbajul industrial. 1.2 Istoricul apariiei manipulatoarelor i roboilor Introducereamanipulatoareloriaroboilorindustrialinproceseledeproducieaavut loc n condiiile trecerii de la fabricaia produselorn serii marila fabricaia de serie medie i mic. Operaiiledemanipulareapieseloriadispozitivelorspecializateaudevenitastfeldemare importann procesele de fabricaie.Fabricareaiutilizareamanipulatoareloriaroboilorindustrialiafostposibildup ce au fost rezolvate urmtoarele probleme : -Manipulareapieselorladistancuajutorulmecanismelorarticulate,numite telemanipulatoare ; -Automatizarea mainilor unelteutiliznd comanda numeric ; -Utilizarea calculatoarelor electronice ; Telemanipulatoarelesuntmanipulatoareacionatedeomdeladistan.Acesteaau aprutdinnecesitateamanipulriimaterialelornocivepentruorganismelevii,utilizatentehnica nuclear. Istoriaroboilorindustrialianceputcumaibinedepatrudeceniiijumtatenurm, cnd inventatorul American George Devol observ, pe de o parte, accelerarea nvechirii (uzurii morale) a mainilor-unelte sip e de alt parte, numrul mare de muncitori care erau obligais efectuezeo extenuant munc repetitiv. Invenia imaginat de G.Devol trebuia s fie o PROIECT DE DIPLOM 3 mainauniversalacarespoatefectuaovarietatedeoperaiisecundarerepetitiveicaresse poatadaptaunuinouprocesstehnologic.Conceptulde,,robotindustrialaprinsconturnanul 1954,cndGeorgeDevolasolicitatbrevetpentruunmanipulatordeuzgeneralcumemorie retroactiv i control punct cu punct, manipulator construit abia n anul 1958. brevetul a fost vndut firmeiCondec,carevadevenicelebrafirmdeaziUnimation.Primulprototip,robotulUnimate (UNIversalautoMATE)realizatdectreaceastfirm,asemntormodelelorurmtoare,dateazdin 1962; n acelai an fiindrealizat primul robot Ford i primul Versatran. Aurmat o perioad de 5 ani n care producia de roboi se limita la cteva exemplare pe an, din modelele citate.Dinanul1967interesulpentruacestesistemesporete.Primelefirmecareauaplicat roboiiindustrialiaufost:GeneralMotorscaren1968acomandat50deexemplareiainiiat studiul unui sistem cu ase grade de libertate, denumit SAM, Ford i General Electric. n anul 1967 firma japonez Tokyo Kikai Boeki a importat din SUA, de la firma AMF, licenadefabricaiearobotuluiVersatran,iarnanul1968firmaKawasakiancheiatcufirma americanUnimationuncontractpentrufabricareanconsumarobotuluiindustrialUnimate, devenitmaitrziuRobitusRB.nacelaianfirmajaponezAidaEngineeringafabricatmanipulatorul Auto Hand. Totnanul1967anceputfabricarearoboilorindustrialinAnglia,duplicen american, iar n anul 1968ncepe fabricarea roboilor n Suedia. Desigur,nutrebuiesignormimportanadificultiloreconomiceisocialecareaparla introducerea acestormijloace de automatizare n producie. Costul ridicat al robotuluiimpune o analizaprofundat a implicaiilor introducerii acestuia ca mijloc de operare n cadrul unui proces tehnologic. Totui,nciudaacestordificulti,dezvoltarearoboilornaniidedup1970poatefi consideratfrexageraredreptexploziv.Dinamicaacesteidezvoltrinregistreazlanivelul anului1970circa200deroboicuovaloaredeasemilioanededolarinSUA;serealizeazn uzina Chevrolet, la Lordstown, prima linie robotizat n care 26 de roboi Unimate execut sudrilecaroseriilor automobilelor Vega. n1970piaanregistreazefortulmasivaljaponezilorpentrurecuperareatimpului pierdut; de altfelchiar n 1970 japonezii produceau aproximativ 10 modele proprii. n aceeiai perioad la Universitateadin Stanford a fost realizatun sistem manipulator-ochi-mnpentrumanipulareaunorcuburicolorateiarnanul1972afostrealizatrobotulmobil intelligent,denumitShakey,echipatcucamerdeteleviziune,sensordeproximitateetc.,pentua PROIECT DE DIPLOM 4 puteas-icoordonezemicrilenjurulobstacolelorisplasezediversecutiidupunmodel impus.nanul1975,laEdinburgh,afostrealizatunmanipulatorautomatochi-mn,denumit Freddy,careputeassortezepiesedelemndintr-ogrmadisleasamblezeconformunui program impus. Robotul Freddy poate fi consideratprintele roboilor de asamblare, primul robot de asamblarecomercializat n SUA fiind echipatcu un bra specializat, tip Puma. Lanivelulanului1974existaucca5500deroboiindustrialidintrecare:2500n Japonia,2000nSUA,1000nEuropa,pentrucaunanmaitrziu,dup[16]sfienfunciune circa 8300 R.I., dintre care :4000 n Japonia, 2500 n SUA i 1200 n Europade vest. Dup [28], n 1978eraunfunciedoar5000deR.I.,dintrecare1000nJaponiai600nRFG.DupaceeaisursseapreciaznsnumrulunitilordemanipulareindustrialeprogramabilefixnJaponiala 29000 i n RFG de acelai ordin de mrime. n conformitate cu [24], n URSS erau n funciunen anul 1976500 R.I.n sfrit, conform cu [27], existaun 1978 n Japonia9800 R.I., dintre care: 15%manipulatoare,74%roboisecveniali,5%roboiindustrialii6%roboiinteligeni.Se observcnstatisticileprivindroboiiindustrialiapardiferenesubstaniale,uneoridatelefiind chiarcontradictorii.Numrulmaredelucrriiprezentrialedatelorprivindroboiiindustrialiau impus, n paralelcu oferta tot mai mare i mai diversificatde roboi, stabilirea unor caracteristici generale,uordeaplicatpentrucompararea,achiziionareaiimplementarealornproducie.Cauzaprincipaladispersieimariadatelorprivindnumrulroboilor,estefaptulcnuexistun consensnliteraturamondialdespecialitatenprivinadefiniriinoiuniideR.I.nacelaitimp, datelecontradictoriicuprivirelanumrulroboilorindustrialireflect,pedeoparte,dinamica dezvoltrii producerii acestui utilaj n rile avansatedin punct de vedere economic iar, pe de alt parte, discreia firmelor productoarei utilizatoare referitor la noutateatehnic a R.I. Optimismulprodusdenumrulmaredetipurideroboioferitdecelectevasutede firme constructoare prezentate pe pia nu trebuietotui s mpiedice o imagine real arspndirii lor. Exceptnd cteva firme cu tradiie i realizri importante (UNIMATION, Cincinnatti Milacron,ASEA,AMF-Versatran,Kawaski,Mitsubishi,Fujitsu,Kaufeldt,etc.),lacares-au adugatprincipaliiconstructorideautovehicule(Renault,Volkswagen,Fiat,GeneralMotorsetc.) marea majoritatea celorlali productori sunt nc la nceput, la nivelul anului 1980 avnd cifre de desfacere reduse.Numrul mare de roboti industriali care aparpe piaa mondial explic explic numrul mare de firme care se ocup de obinerea lor i, n mod implicit, numrul mare de tipuri de R.I. n PROIECT DE DIPLOM 5 fabricaie.n conformitate cu [21], n 1972100 firme produceau 170deR.I. n ntreaga lume.n lucrarea[25], ediia 1 aprut n 1974, sunt prezentate 240 de tipuri de R.I. fabricai de 80firme i semenioneazexistenaaltor37defirmeconstructoaredeR.I.n[28]seprezint14firme japonezecarenoctombrie1979fabricauroboiindustriali.Seconstatcodatcucreterea numruluideroboiapareiodinamicacreteriinumruluideproductori,carecautsaduc perfecionrisubstanialenconstruciaroboilorpecareiproduc.Unexemplusemnificativl oferFrana,caredemarndcercetrilelegatederoboiiindustrialiniunie1974,devinenanul 1978,prinintermediulRegieiNaionaleRenault,posesoareaunuinumrde33roboideconcepie proprie (21 pentru sudur incluznd linia de asamblare final la R18 la Flins i 12 pentru acoperiri de suprafa). n perioada 1970-1980 se remarc de asemenea R.P.BULGARIA care posed o gam de roboi,R.P.Poloncareconstruieteroboisecvenialipneumatici,R.D.German,R.F.German, SuediacareconstruietengeneralroboiacionaipneumaticiU.R.S.S.,careafabricatprimele modele de roboi industriali (UM-1, Universal-50, UPK-1) n anul 1971. naranoastrprincipalaaciunepentruconstruireaderoboiindustrialiprintr-o fabricaie de serie, o constituie Programul M.I.C.M. avizat de C.T.S.-I.C.C.M. din 26.02.1980 i aprobat de conducerea M.I.C.M.n cadrul acestui program sunt prevzute urmtoarele obiective: -asimilarea n ar a fabricaieiunui sistem de roboi industriali; -experimentareaipregtireautilizriiroboilorindustrialindiferitetehnologiicurealizarea echipamentelor auxiliare necesare; -cercetriprivindasimilareacomponentelorspecificeroboilorindustriali(traductoare, servovalve, motoare electrice pas cu pas, motoare hidraulice etc.). Laprogramuldelucruurmascolaboreze8institutedecercetare,3ntreprinderii4 colectivealeunorinstituiidenvmntsuperior(I.P.Bucureti,I.P.T.V.Timioara,I.P.Iai, I.P.Cluj-Napoca). Lanceputulanilor`80cercetrileaufostndreptatespreroboiidingeneraiaadoua. Puterea lor de calcul este suficient pentru a face posibil modificareacomportrii lor, ca rspuns la stimuli din mediul nconjurtor. Lasfritulanului1980,nconformitatecu[26],nindustriajaponezlucraupeste 70.000deroboi,nJaponiafiindestimatafinacelande20.000deexemplare.Excluznd manipulatoarelemanuale i roboii secveniali, populaia de roboin funciune n Japonia a ajuns PROIECT DE DIPLOM 6 la cca 14.000,n timp ce n rile vestice, la sfritul anului 1979, erau aproximativ 6.300 de roboi n funciune, potrivit aceleiai surse bibliografice.Daclasfrsitulanului1985majoritatearoboilorindustrialiimplementainprocese industrialeeraudingeneraiaanti,pnnanul1990s-aateptatscreascponderearoboilor din generaia a doua, astfel ca folosirea roboilor n activitilede asamblare s depeasc celelalte domenii, inclusiv pe cel al sudurii. 1.3 Caracteristici tehnice generale Se obinuiete ca la nceputul unei lucrri s se dea definiii ale domeniului care urmeaz afitratat.Definiiapoatefiprivit,pedeoparte,caodeschideredeorizonturidacsunt specificate obiective mai cuprinztoare dect celecare au fost atinse la stadiul actual de dezvoltare al domeniuluila care se refer. Pe de alt parte, definiia poate fi privit n sensrestrictiv, ceea ce, uneori, poate fi infirmat de evoluia ulterioar a domeniului. Unadinprimeledefiniiidaterobotuluiianconsiderarefaptulcacestaesteun dispozitivcareimitomulntr-oanumitmsur,fiecanfiare,fiecaposibilitideaciune. Astfel, n lucrarea [22], robotul este definit ca un mecanism automat care se poate substitui omului pentruaefectuauneleoperaii,fiindcapabils-imodificesingurcicluldeexecuieprindetecie fotoelectric, creier electronic, servomotor etc. Exist, desigur, i alte definiii date roboilor industriali, dintre care : -definitiaAsociaieiroboilorindustrialidinJaponiaJIRA(JapanIndustrialRobot Association)aratcrobotulesteundispozitivversatiliflexibil,careoferfunciidedeplasare similare celor ale membrelor umane sau ale crui funcii de deplasare sunt comandate de senzori i de mijloace proprii de recunoatere; -definiiaAsociaieiroboilordinMareaBritanieBRA(BritishRobotAssociation)aratc robotulesteundispozitivreprogramabilrealizatpentrumanipulareaitransportulpieselor, sculelor,sauaaltormijloacedeproducieprinmicrivariabileprogramatepentruandeplini sarcinile specificede fabricaie; -definiia Institutului de roboidin America RIA(Robot Institute of America) arat c robotul esteunmanipulatormultifuncional,reprogramabil,destinatdeplasriimaterialelor,pieselor, sculelorsauaaltordispozitivespecializateprinmicrivariabileprogramatepentruandeplini diferite sarcini. PROIECT DE DIPLOM 7 Analizndacestedefiniii,seconstatcmoduldedefinirearobotuluidectreJIRA este destul de larg, incluznd i telemanipulatoarele i protezele, n timp ce definiiile date de ctre BRA i RIA sunt similare, avnd o arie de cuprindere mai restrns. nFrana,prinnormafrancezNFE61-100,sedefinetelanceputmanipulatorulca fiind un mecanism compus n general din elemente montate n serie, articulate sau culisante unul n raportcucellalt,alcruiscopesteapucareaideplasareaobiectelordupmaimultedirecii, comandatfiinddectreunoperatorumansauprinsistemelogicepneumatice,cucamesau electronice. Se definete apoi robotul ca un manipulatorautomat cu poziie aservit, reprogramabil, polivalent,capabilspoziionezeisorientezematerialele,piesele,sculeleidispozitivele specializate n cursul micrilor variabile, programate pentru execuia unor sarcini diverse.Diversitateadefiniiilordateroboilorindustrialiilipsaunuiconsensprivindnoiunea de robot industrial, fac imposibil gsirea unei definiii adecvate. Dar, oare, este absolute necesar o definiie sintetic pentru buna conturarea unui domeniu al cunoaterii? Dindefiniiileprezentateanteriorsedesprindurmtoarelecaracteristicialeroboilor industriali: -Sunt realizai pentru a executa n principal operaii de manipulare, deplasare i transport care necesit vitez i exactitate dar pentru fore limitate; -Suntdotaicumaimultegradedelibertate(ntre26)astfelnctspoatexecuta operaii complexe, fiecare micare fiind controlat de unitatea de conducere; -Sunt autonomi, funcionnd fr intervenia sistematic a omului; -Suntdotaicuomemoriereprogramabilcapabilsconducoaparaturnecesar pentruexecutareaunoroperaiicarepotfischimbateprinmodificareaprogramului iniial; -Sunt dotai cu o capacitate logic, n general foarte redus, cu ajutorul creia pot executa ncercrisialegentredoualternative,precumiaschimbasemnaledeaprobarecu alte aparaturi. Caracteristicile tehnice ale roboilorindustriali includ: dimensiuni, valorile deplasrilor realizabile,precizia,repetabilitatea,numrdegradedelibertate,tipuldeacionare,greutatea robotului,volumulspaiuluidelucru,capacitateasistemuluidecomandicontrol,vitez,sarcin transportabil, condiii de lucru, posibilitatea de a dispune de mai multe brae de lucru. Performaneleroboilorindustriali,nconformitatecu[14],potfiapreciatecuajutorul parametrilor globali, definii dup cum urmeaz: PROIECT DE DIPLOM 8 Parametrul global k1 : k1 = (1.1)(N) * R.I. a servici de Greutatea) lucru(m de spatiului Volumul3 caracterizeazR.Idinpunctdevederealeficieneisaledeintervenienmediulindustrialial supleeisale**.PringreutatedeservicisentelegegreutateaR.I.ncondiiidefuncionare(de exemplu, inclusive greutatea fluidului de acionare). Parametrulglobal k2 : k2= (1.2) R.I.(N) a servici de Greutatea(N) manipulatobiectului Greutatea caracterizeazR.I din punct de vedere al capacitii gravitaionale specifice de manipulare. Parametrul global k3: k3= (1.3) m) ( e pozitionar de precizia xR.I.(N) a servici de Greutatea(N) manipulatobiectului greutatea x) lucru(m de spatiului Volumul3 caracterizeazcalitile tehniceale R.I., acetia fiind cu att mai bunicu ctk3 este mai mare.Roboiiindustrialipotfiapropiaidinpunctdevederefuncionalicaprincipiude sistememecanice,cumsuntmainilecucomandnumericavndncomunurmtoarele proprieti fundamentale : -ambele sisteme(robot i main) sunt prin ele nile generale; -suntspecializatepentruoanumitoperaie,schimbndsimpluinstruciunileconinutentr-o memorie reprogramat. Existoarecareasemnarearoboilorindustrialicuservo-manipulatoarelefolosite pentru operaii de manipulare n medii ostile omului (medii radioactive, medii cu substane chimice nociveetc.).Diferenafundamentalntreceledousistemeesteclamanipulatoareeste indispensabil prezena omului (local sau la distan), n timp ce, roboii industriali funcioneaz n mod autonom. n mod sigur, roboiiindustrialinu au aproape nici un punct comun cu acele maini de tiptradiionalcarendeplinescsarcinidemanipularetipiceroboilor.Estevorbademaini specializate, realizateadesea ca unicate, pentru a executao operaie determinat, fie o anumit serie deoperaii.naceastcategorieintrmainoletradiionaledemontaj,liniiledetransferale PROIECT DE DIPLOM 9 mainilor, braele de alimentare ale preselor i transportoarelor aeriene, utilaje care toate au acelai ciclu de lucru. 1.4. Roboi industriali seriali Specific domeniilor de activitate, oamenii i-au conceput, realizat i perfecionat diverse sisteme automate, de la sistemelesimple la sisteme inteligente, adaptabile i autoinstruibile. Robotulesteomainunealtspecializat,acruiprincipalcaracteristicestepoziiai orientareaefectorului final, realizat prin corelarea micrilor elementelor componente. n general, robotul industrial trebuie s realizeze urmtoarele funcii generale: -S acioneze asupra mediului nconjurtor cu ajutorul dispozitivelor de prehensiune; -Sobinpripercepereinformaiidespremediuidesprepropriastareisprelucreze aceste informaii,conform cerinelorsistemului central de comand; -S comunice cu operatorul uman sau cu ali roboi,inclusiv cu scopulinstruirii acestuia; -S ia deciziipentru realizarea sarcinilor dorite Pentrucretereaproductivitiintr-oaplicaie,osoluiearfiutilizarearoboilorsau,chiarmai mult,integrareaacestorantr-unsistemflexibildefabricaie.Automatizareairobotizareaactivitii de producie, prin integrarea roboilorn celule flexibile de fabricaie, a condusla ateliere flexibile i uzinecomplet automatizate, controlate i conduse cu ajutorul calculatoarelor, n care, de obicei, robotul deservete o celul robotizat. Deexemplu,roboiitipMITSUBISHIsuntusoradaptabilinaplicaiipentru:deservirea mainilor-unelte, ncrcareai descrcarea paletelor, turnare prin injecie etc. n figura 1.1, fiura1.2, acetia execut operaii de manipulare ntr-un sistem automatizat. Fig.1.1Robot tip Mitsubishi PROIECT DE DIPLOM 10 Fig 1.2 Roboi tip Mitsubishi Conducereasistemelorflexibiledeautomatizareesterealizatdeunulsaumaimulte calculatoare,omulavnddoarroluldeprogramareisupervizare.Uniiroboiaucapacitateade adaptarelamediupentrudiversesituaii,fiind nzestraicuinteligenartificial.Aliiauungrad de flexibilitate mai redus, ei executndu-i sarcinile pe baza unui program memorat. Un alt tip de roboi sunt roboii de tip FANUC prezentai in figura 1.3. Fig1.3 Roboi de tip Fanuc n figura 1.4sunt prezentai doi roboi detip Kawasaki. PROIECT DE DIPLOM 11 Fig.1.4Roboi tip Kawasaki 1.5. Structura general a roboilor seriali Exist firme cu tradiie n construcia roboilor seriali integrai n activiti industriale(FANUC, MITSUBISHI, KAWASAKI etc.).n figurile 1.5-1.7 sunt prezentate cteva structuri. Fig.1.5 Roboi tip Fanuc PROIECT DE DIPLOM 12 Fig.1.6 Roboi tip MitsubishiFig.1.7 Roboi tip Kawasaki Structurageneralaunuirobotcuprinde:structuramecanic,sistemuldeacionarei structura de comand aa cum reiese i din figura 1.8. Fig.1.8 1.6. Structura mecanic Structuramecanicaunuirobotserialpoatefireprezentatschematicprintr-unlancinematicde corpuri rigide, conectate cu ajutorul articulaiilor de rotaie sau translaie, care constituie gradele de mobilitate ale structurii. Un capt al lanului l constituie baza robotului, n timp ce prehensorul este montat la cellalt capt. Structura mecanic a roboilorindustriali se mparte n: -Subansamblul principal, care asigur poziionarea prehensorului; PROIECT DE DIPLOM 13 -Subansamblul de orientare, care asigur poziia relativ prehensor-obiect manipulat; -Efectorul final, numit n cazul operaiilor de manipulare,dispozitiv de prehensiune nfiecaremoment,efectorulfinaltrebuiessepoziioneze,cuoanumitorientarepecurba spaialdorit.Braul(subansamblulprincipal)estencredinatcusarcinapoziionriipunctului caracteristic, iar ncheietura (subansamblul de orientare) asigur orientarea prehensorului. Configuraia antropomorfic a condus la denumirea acestor roboi brae articulate. Este cea mai potrivit configuraie pentru mediile cu obstacole. Deoarece roboii cu acest tip de configuraie pot atingeunpunctdinspaiuldelucrunmaimultemoduri,traiectoriaprogramattrebuiealeas. Articulaiileorizontalederotaielimiteazlaacetiroboicapacitateadencrcareaprehensorului iscadperformanelede repetabilitate.Roboii articulainecesitsisteme decontrolmaicomplexe, comparativcualte configuraiicareasigur aceleaiposibilitide ncrcare a prehensorului i acelaispaiudelucru acoperit. Dinaceast categorie,roboiiSCARA suntceimaiutilizain operaiiledeasamblare, fiindfoarterapizii necesituncontrolmai simplu.Robotularticulat estefoarterobustnplan verticalimaipuinrobust nplanorizontal.Maijos estereprezentatrobottip SCARA. PROIECT DE DIPLOM 14 Robot SCARA PROIECT DE DIPLOM 15 2. Modelarea RoboilorIndustriali Seriali 2.1. Structura modelului Robotulproiectattrbuiespermitmanipulareapieselor,caurmareaccesuldispozitivuluide prehensiune n anumite puncte ale spaiului de lucru, cu o anumit orientare. Modelarea este important pentru proiectarea structurii mecanice a robotului, alegerea acionrii, determinarea strategiei de control i simulareacu calculatorul a micriimanipulatorului.n figura 2.1estereprezentatmodelulrobotuluiindsustrialncontextulstructuriigeneralearobotului prezentat n figura 1.8. Creareanroboticametodeloriformalismelorspecificedeanaliz,reprezintunmare avantaj. Prinanalizamodelelormatematiceaferenteroboilorindustrialisestudiazcomportamentul acestora.nacestcapitolsestabilescecuaiilematematicecaredefinescmodelulcinematicalroboilor, pe baza cruia se vor analiza trei structuri de roboi industriali. Laelaborareamodeluluiseconsideripotezesimplificatoare.nmajoritateasituaiilor,n modelarea i analiza roboilor seriali modulari vom considera modulele componente, subansambluri lacarepieselecomponentenu-imodificpoziiaiorientarearelativntimpulfuncionrii. Pentruacestecazuri,subaspectmecanic,elementelecineticedevinelementerigideivorfi reprezentateschematicprinbare.Deasemenea,elementeledelegtur(cuplele)seconsider perfecte sub aspect mecanic. Analizamodelelortrebuiesaibnvederemicriletipice,caresfiecorelatecustructurile specifice de roboi. Comportamentul roboilor se identific cu evoluia n timp a modelelor acestora, conformalgoritmilorstabiliiprincerineleaplicaiei.Simulareapermitetestareamodelelori eliminarea unor eventuale disfuncionaliti. Semodeleaz i se simuleaz robotul, cunoscndu-seecuaiile care descriu poziia i orientarea, respectiv distribuia de vitezei acceleraii pentru fiecare element din structura robotului. Simulareapecalculatornseamnproiectareaunuimodelalunuisistemfizicrealsauteoretic, executarea modelului pe un calculator digital i analizarea rezultatelor execuiei. La simularea n timp real pentru gestionarea eficient a resurselor, prelucrarea grafic trebuie s fie concurent cu execuia programului modelului robotului analizat, pe baza modelului cinematic i a celui dinamic. Robotul trebuie s prelucreze permanent date despre starea evoluiei sale. PROIECT DE DIPLOM 16 2.2. Modelare cinematic Micarearelativdincuplelerobotuluipoziioneaziorienteazprehensorulfadebaza robotului. Analiza cinematic conduce la geometria micrii modulelor robotului i dispozitivului de prehensiunecafunciidetimp,fraluanconsiderareforelesaumomentelecarecauzeaz micarea prin relaia n funcie de timp ntre coordonatele operaionale(coordonatele prehensorului) icoordonatelegeneralizate(coordonatelecuplelorcinematice),seobineodescriereanalitica micrii spaialea robotului. 2.2.1METODA ITERATIV Unadintremetodeleutilizatefrecventnmodelareacinematicdirectesteometoditerativ. Easebazeazpeaplicareavectorilordepoziie,amatricelorderotaieiaderivateloracestoran raport cu timpul.Pentru descrierea metodei se reprezint schematic structura mecanic a unui robot cu n g.d.l. Ea esteformatdinnelementerigideimobilelegateprinncuplecinematicemotoaredeclasaa cincea{R-rotaie; T-translaie} i considerate perfecte sub aspect mecanic. PROIECT DE DIPLOM 17 MetodaiterativconstnparcurgerealanuluicinematicalrobotuluidinsprebazafixOspre dispozitivuldeprehensiunenideterminareapriniteraiisuccesiveaparametrilorcinematicicare urmeaz: { 1 , , , , , = i a v kiiiiiiiiii c e n}. Parametriimenionaicaracterizeazmicareafiecruielementi,i=1n,nraportcu sistemul fix (T0) de la baza robotului. Exprimarea acestor parametri se face n sistemul de referin (Ti), semnificaia lor fiind urmtoarea: ii k -reprezint versorul axei de micare de ordin i; iiii c e , -reprezintvitezaiacceleraiaunghiularcucareelementuliserotetenjurul punctului su Oi (originea sistemului(Ti)), exprimate n raport cu (T0); iiii a v , -reprezint viteza i acceleraia punctului Oi exprimate n raport cu sistemul fix(T0). A) ROBOT INDUSTRIAL SERIAL CU STUCTURA TTR1 Nume robot: TTR1 nfigura2.2.1Aestereprezentatstructuramecanicaunuirobotcu3gradedelibertate.Ea esterealizatdin4elementerigidelegatentreeleprin3cuplecinematicemotoaredeclasaa PROIECT DE DIPLOM 18 cincia{R-rotaie,Ttranslaie(prismatice)}iconsiderateperfectedinpunctdevedere mecanic. Fig.2.2.1A Numar grade de libertate: 3 Tipul cuplei 1 (R- rotaie, T -translaie): t Tipul cuplei 2 (R- rotaie, T-translaie): t Tipul cuplei 3 (R- rotaie, T translaie): r
Versorul axei cuplei 1...
ATENIE! Introduceicosinusurile directoare - valori numerice intre [-1,1] -componenta pe x: 0 -componenta pe y: 0 -componenta pe z: 1
Matricea de rotaie este: PROIECT DE DIPLOM 19
[R]10 =((((
1 0 00 1 00 0 1
Vectorul de poziie al cuplei 1 fata de sistemul 0 (se va ine cont numai de dimensiunile geometrice:) -componenta pe x: 0 -componenta pe y: 0 -componenta pe z: 0
10 r=((((
100q
Versorul axei cuplei 2...
ATENIE! Introduceicosinusurile directoare - valori numerice intre [-1,1] -componenta pe x: 0 -componenta pe y: 1 -componenta pe z: 0
Matricea de rotaie este:
[R]21 =((((
1 0 00 1 00 0 1
Vectorul de poziie al cuplei 2 fata de sistemul 1 (se va ine cont numai de dimensiunile geometrice:) -componenta pe x: 0 -componenta pe y: l2 -componenta pe z: l1
PROIECT DE DIPLOM 20 21 r=((((
+111202q
Versorul axei cuplei 3...
ATENIE! Introduceicosinusurile directoare - valori numerice ntre [-1,1] -componenta pe x: 0 -componenta pe y: 1 -componenta pe z: 0
Matricea de rotaie este:
[R]32 =((((
) cos( 0 ) sin(0 1 0) sin( 0 ) cos(3 33 3q qq q
Vectorul de poziie al cuplei 3 fa de sistemul 2 (se va ine cont numai de dimensiunile geometrice:) -componenta pe x: 0 -componenta pe y: l3 -componenta pe z: 0
32 r=((((
0130
Versorul axei efectorului final:ATENIE! Introduceicosinusurile directoare - valori numerice ntre [-1,1] -componenta pe x: 0 PROIECT DE DIPLOM 21 -componenta pe y: 1 -componenta pe z: 0
Matricea de rotaie este:
[R]43 =((((
1 0 00 1 00 0 1
Vectorul de poziieal efectorului final fa de centrul ultimei cuple: -componenta pe x: 0 -componenta pe y: l4 -componenta pe z: 0
43 r=((((
0140 Nume robot: TTR1
[R]10=((((
1 0 00 1 00 0 1 [R]21 =((((
1 0 00 1 00 0 1
[R]32 =((((
) cos( 0 ) sin(0 1 0) sin( 0 ) cos(3 33 3q qq q
PROIECT DE DIPLOM 22 [R]43 =((((
1 0 00 1 00 0 1
11 k=((((
100 22 k=((((
010 33 k=((((
010 44 k=((((
010
00 e=((((
000 00 v=((((
000 e00=((((
000 00v =((((
g00 PROIECT DE DIPLOM 23
11 e=((((
000 22 e=((((
000 33 e=((((
003q44 e=((((
003q
11 v=((((
100q 22 v=((((
120qq
33 v=((((
-- 1 321 3) cos() sin(q qqq q 44 v=((((
-- 1 321 3) cos() sin(q qqq q
11 c =((((
000 PROIECT DE DIPLOM 24 22 c =((((
000 ((((
=00333 q c 44 c =((((
003q
11 a =((((
+100q g
22 a =((((
+120q g q 33 a =((((
+ -+ -) ( ) cos() ( ) sin(1 321 3q g qqq g q
44 a =((((
+ -+ - 1 321 3( ) cos() ( ) sin(q g qqq g q
04 v =((((
120qq PROIECT DE DIPLOM 25 04 e =((((
003q
04 a =((((
+120q g q
04 c =((((
003q
B) ROBOT INDUSTRIAL SERIAL CU STRUCTURA TTR2
Nume robot: TTR2 nfigura2.2.1Bestereprezentatstructuramecanicaunuirobotcu3gradedelibertate.Eaeste realizat din 4 elemente rigide legate ntre ele prin 3 cuple cinematice motoare de clasa a cincia {R- rotaie, T- translaie} i considerate perfecte din punct de vedere mecanic. Fig.2.2.1B PROIECT DE DIPLOM 26 Numar grade de libertate: 3 Tipul cuplei 1 (R rotaie, T translaie): t Tipul cuplei 2 (R rotaie, T translaie): t Tipul cuplei 3 (R rotaie, T translaie): r
Versorul axei cuplei 1...
ATENIE! Introduceicosinusurile directoare - valori numerice ntre [-1,1] -componenta pe x: 1 -componenta pe y: 0 -componenta pe z: 0
Matricea de rotaie este:
[R]10 =((((
1 0 00 1 00 0 1 Vectorul de poziie al cuplei 1 fa de sistemul 0 (se va ine cont numai de dimensiunile geometrice:) -componenta pe x: 0 -componenta pe y: 0 -componenta pe z: 0
10 r=((((
001q
Versorul axei cuplei 2...
ATENIE! Introduceicosinusurile directoare - valori numerice ntre [-1,1] -componenta pe x: 0 PROIECT DE DIPLOM 27 -componenta pe y: 0 -componenta pe z: 1
Matricea de rotatie este:
[R]21 =((((
1 0 00 1 00 0 1 Vectorul de poziie al cuplei 2 fa de sistemul 1 (se va ine cont numai de dimensiunile geometrice:) -componenta pe x: 0 -componenta pe y: 0 -componenta pe z: l1
21 r=((((
+11002q
Versorul axei cuplei 3...
ATENIE! Introduceicosinusurile directoare - valori numerice ntre [-1,1] -componenta pe x: 0 -componenta pe y: 0 -componenta pe z: 1
Matricea de rotaie este: [R]32 =((((
1 0 00 ) cos( ) sin(0 ) sin( ) cos(3 33 3q qq q
PROIECT DE DIPLOM 28 Vectorul de poziie al cuplei 3 fa de sistemul 2 (se va ine cont numai de dimensiunile geometrice:) -componenta pe x: 0 -componenta pe y: 0 -componenta pe z: l2 32 r=((((
1200
Versorul axei efectorului final:ATENIE! Introducei cosinusurile directoare - valori numerice ntre [-1,1] -componenta pe x: 0 -componenta pe y: 1 -componenta pe z: 0
Matricea de rotaie este: [R]43 =((((
1 0 00 1 00 0 1 Vectorul de poziie al efectorului final fade centrul ultimei cuple: -componenta pe x: 0 -componenta pe y: l3 -componenta pe z: 0 43 r=((((
0130
< MODEL CI NEMATI C ROBOT>
Nume robot: TTR2
PROIECT DE DIPLOM 29
[R]10 =((((
1 0 00 1 00 0 1 [R]21 =((((
1 0 00 1 00 0 1 [R]32 =((((
1 0 00 ) cos( ) sin(0 ) sin( ) cos(3 33 3q qq q [R]43 =((((
1 0 00 1 00 0 1
k11=((((
001 22 k =((((
100 33 k =((((
100 44 k =((((
010
00 e =((((
000 PROIECT DE DIPLOM 30 00 v =((((
000 00 c =((((
000 00 a =((((
g00 11 e =((((
000 22 e =((((
000 33 e =((((
300q 44 e =((((
300q
11 v =((((
001q 22 v =((((
210qq 33 v =((((
- -21 31 3) sin() cos(qq qq q PROIECT DE DIPLOM 31 44 v =((((
- - -21 33 1 3) sin(13 ) cos(qq qq q q
11 c =((((
000 22 c =((((
000 33 c =((((
300q 44 c =((((
300q
11 a =((((
gq01 22 a =((((
+210q gq 33 a =((((
+- -21 31 3) sin() cos(q gq qq q 44 a =((((
+- - - -223 1 33 1 313 ) sin(13 ) cos(q gq q qq q q PROIECT DE DIPLOM 32 04 v =((((
- - + - - 23 31 3 313 ) sin(13 ) cos(qq qq q q 04 e =((((
300q 04 a =((((
+- - - - - - + + - - 223 3 3 323 3 1 3 313 ) cos( 13 ) sin(13 ) sin( 13 ) cos(q gq q q qq q q q q 04 c =((((
300q
C) ROBOT INDUSTRIAL SERIAL CU STRUCTURA TRR Nume robot: TRR nfigura2.2.1Cestereprezentatstructuramecanicaunuirobotcu3gradedelibertate.Ea esterealizatdin4elementerigidelegatentreeleprin3cuplecinematicemotoaredeclasaa cincia {R- rotaie, T- translaie} i considerate perfecte din punct de vedere mechanic. PROIECT DE DIPLOM 33 Fig.2.2.1C Numar grade de libertate: 3 Tipul cuplei 1 (R rotatie, T translatie): t Tipul cuplei 2 (R rotatie, T translatie): r Tipul cuplei 3 (R rotatie, T translatie): r
Versorul axei cuplei 1...
ATENIE! Introducei cosinusurile directoare - valori numericentre [-1,1] -componenta pe x: 0 -componenta pe y: 0 -componenta pe z: 1
Matricea de rotaie este:
[R]10 =((((
1 0 00 1 00 0 1 PROIECT DE DIPLOM 34 Vectoruldepoziiealcuplei1fadesistemul0(sevainecontnumaidedimensiunile geometrice:) -componenta pe x: 0 -componenta pe y: 0 -componenta pe z: 0 10 r=((((
100q
Versorul axei cuplei 2...
ATENIE! Introducei cosinusurile directoare - valori numerice ntre [-1,1] -componenta pe x: 0 -componenta pe y: 0 -componenta pe z: 1 Matricea de rotaie este:
[R]21 =((((
1 0 00 ) cos( ) sin(0 ) sin( ) cos(2 22 2q qq q
Vectorul de poziieal cuplei 2 fa de sistemul 1 (se va tine cont numai de dimensiunile geometrice:) -componenta pe x: 0 -componenta pe y: 0 -componenta pe z: l1
21 r=((((
1100
Versorul axei cuplei 3... ATENIE! Introducei cosinusurile directoare - valori numerice ntre [-1,1] PROIECT DE DIPLOM 35 -componenta pe x: 0 -componenta pe y: 1 -componenta pe z: 0 Matricea de rotaieeste:
[R]32 =((((
) cos( 0 ) sin(0 1 0) sin( 0 ) cos(3 33 3q qq q
Vectorul de poziie al cuplei 3 fa de sistemul 2 (se va ine cont numai de dimensiunile geometrice:) -componenta pe x: 0 -componenta pe y: l2 -componenta pe z: 0 32 r=((((
0120
Versorul axei efectorului final:ATENIE! Introducei cosinusurile directoare - valori numerice ntre [-1,1] -componenta pe x: 0 -componenta pe y: 1 -componenta pe z: 0 Matricea de rotaie este:
[R]43 =((((
1 0 00 1 00 0 1 Vectorul de poziie al efectorului final fa de centrul ultimei cuple: -componenta pe x: 0 -componenta pe y: l3 -componenta pe z: 0
PROIECT DE DIPLOM 36 43 r=((((
0130
Nume robot: TRR
[R]10 =((((
1 0 00 1 00 0 1 [R]21 =((((
1 0 00 ) cos( ) sin(0 ) sin( ) cos(2 22 2q qq q [R]32 =((((
) cos( 0 ) sin(0 1 0) sin( 0 ) cos(3 33 3q qq q [R]43 =((((
1 0 00 1 00 0 1
11 k=((((
100 22 k=((((
100 33 k=((((
010 PROIECT DE DIPLOM 37 44 k=((((
010 00 e=((((
000 00 v=((((
000 00 c=((((
000 00 a=((((
g00
11 e=((((
000 22 e=((((
200q 33 e=((((
-- 2 332 3) cos() sin(q qqq q 44 e=((((
-- 2 332 3) cos() sin(q qqq q
PROIECT DE DIPLOM 38 11 v=((((
100q 22 v=((((
100q 33 v=((((
- + - - - - - 1 3 2 31 3 2 3) cos( 12 ) sin(0) sin( 12 ) cos(q q q qq q q q 44 v=((((
- - - + - - - - - - - 13 ) sin( ) cos( 12 ) sin(013 ) cos( ) sin( 12 ) cos(2 3 1 3 2 32 3 1 3 2 3q q q q q qq q q q q q
11 c=((((
000 22 c=((((
200q 33 c=((((
- - -- - - 2 3 3 2 332 3 3 2 3) sin( ) cos() cos( ) sin(q q q q qqq q q q q 44 c=((((
- - -- - - 2 3 3 2 332 3 3 2 3) sin( ) cos() cos( ) sin(q q q q qqq q q q q
11 a=((((
+100q g PROIECT DE DIPLOM 39 22 a=((((
+100q g 33 a=((((
+ - + - - - + - - - ) ( ) cos( 12 ) sin(12) ( ) sin( 12 ) cos(1 3 2 3221 3 2 3q g q q qqq g q q q 44 a=((((
- - - + - + - - - - - - - - - - 2 3 1 3 3 2 322222 3 1 3 3 2 3) sin( 13 ) cos( ) cos( 12 ) sin(13 12) cos( 13 ) sin( ) sin( 12 ) cos(q q q q g q q qq qq q q q g q q q
04 v=((((
- - - - - - - - 12 2 2 22 2 2 213 ) sin( 12 ) sin(13 ) cos( 12 ) cos(qq q q qq q q q 04 e=((((
-- 23 23 2) cos() sin(qq qq q 04 a=((((
+- - - - - - - - - - - - - - + - -12 2 2 222 222 22 2 2 222 222 213 ) sin( 12 ) sin( 13 ) cos( 12 ) cos(13 ) cos( 12 ) cos( 13 ) sin( 12 ) sin(q gq q q q q q q qq q q q q q q q 04 c=((((
- - -- - - 22 3 2 3 22 3 2 3 2) sin( ) cos() cos( ) sin(qq q q q qq q q q q PROIECT DE DIPLOM 40 3.Proiectareamodululuidetranslaiepeverticala dispozitivului de prehensiune Introducere Principalaproblemnmuncadeproiectaredindomeniulmechanicestedimensionarea organelordemaininfunciedesolicitrilecunoscute.Uneorisevorbetechiardeo predimensionare,adicdeodeterminarecuajutorulunorrelaiisimplificateaprincipalelor dimensiuni geometrice ale pieselor solicitate mechanic. Dimensionareareprezint,nesen,rezolvareauneiecuaiicaredescrie(deregul)egalitateadintreotensiuneiotensiuneadmisibil.Aceastecuaieareunnumroarecaredenecunoscute (de obicei dimensiuni geometrice) i adeseori o infinitate de soluii. Pentru a putearezolva o astfel deecuaieproiectantulestenevoits-ialeagdoarunadinacestenecunoscute,iarpetoate celelaltesleconsideresaucunoscute(folosindexperienapropriesauindicaiiledinliteraturede specialitate)sausleexprimenfunciedenecunoscutaaleasprindiferiteprocedee.Adeseori, necunoscuta ce se dorete a fi eliminat seexprim ca i un produs dintre necunoscutaaleas spre determinare i un coefficient pentru care se gsesc indicaii(ntre limite foarte largi) n literatura de specialitate.nacestfelseobineoecuaiecuosingurnecunoscut,careserezolvfrnicio dificultate. Dinnefericire,oastfeldeabordarenureprezintdectrezolvareaproblemeiiniialentr-un hiperplanal spaiului soluiilor ecuaieicu mai multe necunoscute .Pentru soluia gsit nu exist niciogaranieceaesteceamaibun(optim)dintresoluiileposibilealeproblemei.nplus soluia gsit (prin rezolvarea ecuaiei cu o necunoscut) s-ar putea s nu convin din alte puncte de vedere,pecareproiectantulnule-aluatsaunuleputealuanconsiderareatuncicndascrisi rezolvatecuaia de dimensionare. Se au aici n vedere restriciile de natur economic, tehnologic, de montaj, de material etc. 3.1.Studiuldinamicalroboilorindustrialideconstrucie modular cu module interschimbabile Fabricaianserieaunuinumrderoboiindustrialidediferitevariantearhitecturale, acionndnspaiidelucrudeformeidimensiunidiferite,nfunciedecerineleprogramuluide manipulare, se poate realizaconcepnd modele de roboi n structur modular. PROIECT DE DIPLOM 41 Concepiamodularestrebazatperealizareaseparatamoduleloracrorconstruciepermite asamblarealorcualtemodule.Rezultastfelarhitecturivariatederoboiindustriali,carepotfi livrai beneficiarilor n conformitate cu cerinele aplicaiei concrete. Folosind module de translaie, de rotaie, de basculare i de orientare, se pot concepe variante de mecanisme generatoare de traictorii, transpuse practic n tot attea variante deroboi industriali. Fiinddatecincimoduleacionateelectric:modululdetranslaiedelabazarobotului, module de translaie pe verticali de rotaie a braului robotului, respectiv module de translaie i de orientare a dispozitivului de prehensiune. Interconectndacesteunitimodulare,rezultunrobotindustrial,posedndtreigrade de libertate , de tipul TTRTR. Se noteaz: 0l,il (i=15)-parametrii constructivi ai robotului; kq -parameriigeometrico-cinematici(translaiiirotaii)careconstituecoordonatele generalizate ale sistemului; k=13 numrul gradelor de libertate ale robotului; iP (i=15)-foreledegreutatecorespunztoaremodulelorrobotuluiidispozitivuluide prehensiune cu semifabricatul prins nacest dispozitiv de prehensiune. iF(i=1, 2, 4) forele motoare n care se include i forele rezistente aferente modulelor 1,2,4; i M(i=3,5)-momentelemotoarencareseincludeimomentelerezistenteaferente modulelor 3 i 5; im(i=15) masele modulelor robotului i a dispozitivului de prehensiune cu obiectul de manipulat prins n clete; .kqvitezele generalizate; ..kqacceleraiile generalizate iJ2A(i=2,3)momenteledeineriemecanicealemodulelordetranslaie2iderotaie3n raport cu axa de rotaie ( 2A); PROIECT DE DIPLOM 42 iJ3A(i=4, 5) - momentele de inerie mecanice ale modulului 4, respectiv subansamblului format din partea mobil a modulului 5 solidar cu dispozitivul de prehensiune i cusemifabricatul de manipulat, n raport cu axa de rotaie (3A ) ioiJ2(i=4, 5) - momentele de inerie mecanice ale modulului 4, respectiv subansamblului format din partea mobil a modulului 5 solidar cu dispozitivul de prehensiune i cusemifabricatul de manipulat, n raport cu axa de rotaie 4orespectiv 5oi sunt paralele cu axa(2A ) Ecuaiile dinamice ale robotului a crui schema cinematic structural este prezentat n figura2.2.1A,seobinaplicndprincipiuldeplasrilorvirtualesubformdinamicpentru sistemele cu mai multe grade de libertate exprimate prin relaia: = + =niiiii M r F w1) ( u o o o (3.1) n care prin iF i iM s-au notat forele exterioare date i de inerie, respectiv momentele acestorforecorespunztoaremodulelorrobotului,iarprin i ro i iu o s-aumotatdeplasrile elementelor virtuale ale modulelor compatibile cu legturile. Se poate scrie: 0 ] [ } ] [ {} )] ( ) ( [ { ][ } ] [ ] [ {5) 5 (3 5 5 4 354) (54) (354) (4 43 3 4 5 451 4 4) 4 (154) (253) (2 3 3 252) (2522 2 1 354) (454) (3 4 354) (354) (351) (1 1= + + + + + + + + + + + + =A= = ==A=A== = = = = = q M M q sq F F F Fcq q l l F q l F M M M q FP F q sq F F F cq F F F F wjiijiiitiijj jiiciijiiji iijiitiitiiciijo oo oo ouu (3.2) n relatia (3.2) s-au notat prin) 5 ,..., 1 () (1 = i Fij - forele de inerie corespunzatoare modulelor 1-5 datorate acceleraiei 1q ; ) 5 ,..., 2 () (2 = i Fij -forele de inerie corespunzatoare modulelor 2-5 datorate acceleraiei2q ; ) 5 , 4 () (4 = i Fij -fortele de inerie corespunzatoate modulelor 4 si 5 datorate acceleraiei 4q ; ) 5 , 4 () (3 = i Fic -foreleinerialeCorioliscorespunzatoaremodulelor4si5datoratemicarilorde rotaie si de translaie ale acestora caracterizate de parametri 3q si 4q ; PROIECT DE DIPLOM 43 ) (3it F si) 5 , 4 () (3 = i Fitu -foreleinerialedetransportcorespunzatoaremodulelor4si5datorate micrii de rotaie a acestora in jurul arcului) (2A ; ) 5 , 4 , 3 () (2 3 = A i Mij =momenteleforelordeinerieinraportcuarcul 2(A ) corespunztoare modulelor 3,4 si 5, datorate micrii de rotaie a acestora, caracterizat de parametrul 3q ; ) 5 (3 5A j M - momentul forelor de inerie in raport cu arcul) (3A corespunzator modulului 5, datorat micrii de rotaie caracterizat de parametrul 5q; ) 5 , 4 () (2 = A i Mic - momentele forelor ineriale Coriolis in raport cu arcul) (2A ; Expresiilemoduleloracestorforesimomente,conformcunotaiiledinfigura2.2.1A, sunt: ); 5 ,..., 1 (1) (1= = i q m Fiij) 5 ,..., 2 (2) (2= = i q m Fiij;); 5 , 4 (4) (4= = i q m Fiij ); 5 , 4 ( * 24 3) (3= = i q q m Fiic; ) (3 4 4 4) 4 (3q q l m Ft+ =; ) (3 4 5 4 5) 5 (3q q l l m Ft+ + = ; ) (23 4 4 4) 4 (3q q l m Ft+ =u; ) (23 4 5 4 5) 5 (3q q l l m Ft+ + =u;3) 3 (2) 3 (2 3q J Mj A A = (2.3) ; ] ) ( [324 4 4) 4 (0) 4 (2 324q q l m J Mj+ + =A; ] ) ( [324 5 4 5) 5 (0) 5 (2 325q q l l m J Mj+ + + =A ;5) 5 (3) 5 (3 5q J Mj A A = ; ) ( 24 3 4 4 4) 4 (2q q q l m Mc+ =A. ) ( 24 3 4 5 4 5) 5 (2q q q l l m Mc+ + =A nrelaia(3.2)deplasrilevirtuale 5 2 , 1,..., q q q o o o suntindependente.Egalndcuzero acestedeplasri,cuexcepiauneia,seobinsuccesivfactoriicarenmulescacestedeplasri egali cu zero. Rezult astfel un sistem de ecuaii difereniale scalare format din attea ecuaii ci parametri independeni sunt. Astfel,avndnvedere(3),din(2)seobinecuaiiledinamicealerobotuluiTTRsub forma: ; ) ( ) ( [) ( 2 ) ( )] ( ) ( [ ) (3 4 123 3 4 5 4 5 4 4 44 3 3544 3543 3 4 5 4 5 4 4 4 151sq F F q sq q l l m q l mq q cq m q sq m q cq q l l m q l m q miiiiii+ = + + + + + + + + + + + = = =
(3.4) ; ) (522 252 = =iiiiP F q m(3.5) PROIECT DE DIPLOM 44 ; )] ( ) ( [ 2) ( ) ( [ )] ( ) (3 4 3 4 5 4 5 4 4 4224 5 4 524 4 4) 5 (0) 4 (0) 3 (2 1 3 4 5 4 5 4 4 42524M q q q l l m q l mq q l l m q l m J J J q cq q l l m q l m= + + + ++ + + + + + + + + + + + +A423 4 5 4 5 4 4 4 4541 354)] ( ) ( [ ) ( ) ( F q q l l m q l m q m q sq miiii= + + + + + = =;(3.6) 5 5) 5 (3M q J =A. (3.7) 3.2Aspecteprivindcalcululiconstruciamodulelordetranslaiepe vertical din structura roboilor industriali modulari Roboii industriali specializai ridic productorului problema realizrii unei diversiti mari detipuri,delacelemaisimplecumobilitateiflexibilitateredus,pnlaroboiinteligeni.O rezolvareaproblemeiconstnabordareaconstrucieimodularearoboilor.Aceastapresupune realizareaunuinumrdemodulestandard,comunepentruoaceeaifamiliederoboi,care, combinate,judicios,sconduclaovarietatedeconstruciidiferitencomplexitateiutilizare. Pentru ca un sistem modular s rezolve problemele ridicate de proiectare, realizare i exploatare, el trebuiesfiecompusdintr-unnumrredusdemodule,avndoconcepieunitariposibiliti multiple de interconectare funcional. Analizndcriteriiledeoptimizareamintitemaisus,amconceputiproiectatunmodulde translaiepeverticaldinstructuraunuirobotindustrialmodularacionatelectric,posedndtrei grade de libertate. Robotul este constituit din modulul translaie de baz MTBA, modulul de transla-ie pe vertical MTV, modulul de rotaie MTR, modul detranslaie MTB din componena braului, modulul de orientare MO i dispozitivul de prehensiume DP. Obiectullucrriilconstituiecalcululiconstruciamodululuidetranslaiepeverticaldin structura robotului menionat. Utilizndecuaiiledinamicedeterminatemaisussepoaterealizacalcululmotorului modulului de translaie pe vertical. Astfel: 25imi =|
\|||.q2 F225iPi = :=(3.8) PROIECT DE DIPLOM 45 n relaia (3.8)s-au notatmiPii 2 3 , 4 , 5 , := 2 3 , 4 , 5 ,masele, respectiv greutile modulelor MTV, MTB,MO(includeidispozitivuldeprehensiune); 2q -acceleraiileliniarelaieire corespunztoare modulelor MTV i MTB , 2Ffora motoare corespunztoare modulului. Avnd n vedereconstruciamodululuiMTV,sepoatedeterminaexpresiaforeimotoare 2F nfunciede momentele motoare, rapoartele de transmitere, randamentele , geometria transmisiei urub-piuli cu bile precum i tipul ghidajelor utilizate. Foraaxialutil(foramotoare)necesarpuneriinmicareaechipajelormobileale modulului MTV are expresia: F FsbFf := (3.9) ncare sbF reprezintforaaxialdezvoltatdetransmisiacuurubcubile,iar fF esteforade frecare din ghidaje. Fora sbFdezvoltat de transmisia cu urub cu bile are expresia: Fsb2 103Msd0tg arctgkdbsin u|
\||.+|
\ :=[N] (3.10) n care: 0d(mm) - este diametrul cilindrului pe care se afl centrele bilelor - reprezint unghiul de nchidere a elicei pe cilindrul mediu k- este coeficientul de frecare de rostogolire! d - diametrul bilei - unghiul de contactsM -reprezintmomentuldetorsiunelaaxulurubuluicubile.Notndcu sP ,i sn puterea, respectiv turaia urubului cu bile, se poate determina momentul de torsiune cu relaia: sssnPM 9550 =Puterea P se determin astfel: m r m sP P q q =(N.m)
(3.11) (3.12) nrelaia(3.12)s-anotatprin mP putereadezvoltatdeservomotorcareantreneazn micareechipajelemobiledincomponenamodulelor,iarprin m rq q s-aunotatrandamenteleunei perechi de rulmeni i angrenajului melcat. Turaiasna urubului cu bile are expresia: PROIECT DE DIPLOM 5 nsnmim:=(rot/min) (3.13) ncare mn esteturaiaarboreluimotorului,iar mi esteraportuldetransmitereal angrenajului melcat. Avnd n vedere (5), (6) i (7) , relaia (4) ajunge la forma Fsb191 105 Pm qr qm im( )nmdo tg atanKdbsinu |
\||.+|
\||.:=sinu
(3.14) inndseamade(3.9)i(3.14),ecuaiadinamic(3.5)corespunztoaremodululuide translaie pe vertical MTV devine: 25imi( )qi=191 105 Pm qr qm im( )nmdo tg atanKdbsinu |
\||.+|
\||.:=25imi( )qi=191 105 Pm qr qm im( )nmdo tg atanKdbsinu |
\||.+|
\||.:=25iPi=(3.15)
Impunndparametriigeometrici,mecanici-constructivicorespunztorimodululuide translaie pe vertical MTV, modulului de rotaie MR, de orientare MO cu dispozitivul de prehensiune DP, precum i valorile extreme ale parametrilor geometrico-cinematici culei de peelementele de ieire ale modulului, se poate alege motorul de acionare al modulului prin utilizarea ecuaiei dinamice (3.15) .
3.3. Alegerea motorului Utiliznd urmatoarele date numerice a fost obinutputerea motorului: 8 . 13552== iim [kg]masele modulelor de rotaie, translaie a braului, modulului de orientare idispozitivului de prehensiune cu piesa prins n dispozitiv.995 . 0 =rq randamentul unei perechi de rulmeni 84 . 0 =mqrandamentul reductorului melcat 98 . 12 =bd[mm] , diametrul bilelor urubului 39 . 11 )* 14 . 3(22= = +cdParctg8 . 152 =cd[mm],k=0.008...0.01[mm] 1 . 0..2 = q[m/s],135852=iP[N] Puterea motorului necesar pentru antrenarea modulului este: P=0.68 Kw Momentul de torsiune: M9554 P n:= M 2.166 = [Nm](3.16) DincatalogulfirmeiFanucamalesservomotorul:SLM100(fig3.1)dotatcuencoderavnd urmatoarele caracteristici: Voltajul: 230 [V], Puterea: 1 [Kw],Turaia:3000[rot/min] Fig. 3.1
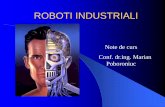
Momentul de torsiune: 3.18 [N*m] Momentul de inerie al rotorului: 1.16 [kg2m410] Greutarea:4.5 [kg] la care se mai adaug 0.6 [kg] reprezentnd greutatea frnei care este montat pe motor Feedback : 2500 linii Incremental Encoder (5 VDC5% @ 0.3 A; 250 kHz max.) 3.4. Alegerea urubului cu bile Generaliti Pentrurealizareauneimicriderostogolirentreelementeletransmisiei urubpiuliseutilizezuruburilecubile,caresemaidefinesccaansamblul mecanic funcional urub - piuli cu bile interpuse. Corpurile de rostogolire, prin intermediul crora se realizeaz contactul dintre urubipiuli,determincaracteruldeosebitalacestorcuple,ducndlaomrire semnificativ a randamentului. Avantajele acestor mecanisme n raport cu uruburile de micare clasice sunt: -coeficientdefrecaremultmaimic,attlapornirectinfuncionare,datorit nlocuirii frecrii de alunecare prin frecarea de rostogolire; - randament ridicat, =90 ... 95%; -preciziecinematicntimp,jocurileaxialeputndfiuoreliminateprin constructive adecvate; -capacitate portant ridicat i uzare extrem de redus; siguran n funcionare; -posibilitateautilizriintr-ogamlargdetemperaturi(60C...500C)ichiar medii corozive etc. Dezavantajeleprincipalealeacestormecanismesunt:construciamai complicat costul mult mai ridicat. Construciaifuncionareaunuiastfeldemecanismsepoateurmrinfigura3.2n urubsinpiulisuntpracticatecanaleelicoidalencaresedeplaseazncircuit corpurile de rostogolire (bilele). La captul piuliei bilele sunt readuse n
circuit printr-un canal de revenire (recirculare), care permite circuitul bilelor n canalele elicoidale i nu le las s ias afar din piuli. Fig.3.2 Existmaimultesistemederecirculareabilelorcumarfisistemulde recirculareabilelorprintr-opanexterioarfixatnpiuli,sistemderecirculare prin eav exterioarfixat n piuli, mai exist un sistem care le combin pe cele 2 mai sus amintite adic sistemul combinat de recirculare a bilelor utilizeaz atteav ct i pan de recirculare. n cazul uruburilor scurte, la curse mici ale piuliei, se poate utiliza sistemul de recirculare a bilelor direct prin urub. uruburilecubileseutilizeazpentrutransformareamicriiderotaienmicarede translaiesauinvers(fig.3.3),cumodificareaforeiaxialetransmise,nconstruciademaini- unelte, autovehicule, mecanic fin, aeronautic, maini de ridicat i transportat .a. Fig. 3.3 Calculul i dimensionarea urubului cu bile: Din schema cinematica a mecanismului se cunosc: v 100 := [mm/min] viteza de deplasare a piuliteiFa1358 := [N]forta axialan 600 := [rot/min] turatiaSarcina axiala maximaFamedFa:= Famed1.358 103 =
l 600 := [mm] lungimea surubuli cu bilelflungimea de f lambaj lf0.7l :=Fa1358 :=[3 tab. 2.34 pag 155]d1nec464 Fa lf2 caf|\|.t3E :=d1nec8.759 = [mm] din catalogul f irmei ONDRIVE se adopta surubul cu bile seria LSAGF25-C diametrul 25 [mm] impreuna cu piulita omoloaga seria N2510E5PD cu pasul de 10 [mm]d125 := [mm] P 10 := [mm] Fig. 3.4 Forta axiala criticaa 2 := coeficient functie de tipul lagarelor surubului[3 tab. 2.31 pag 150]ls lungimea dintre reazemele surubuluils550 := [mm][ 3 tab 2.34 pag 155]Facr34000a d14( )ls2 :=Facr8.781 104 = [N]FaFacr< se observa ca, conditia este respectataCapacitatea de incarcare dinamica necesara
Randamentul cupleiu 45 :=ungliul de contact al bilelordb1.98 :=diametrul bilelor [mm]K 8 103 := [mm] pentru otel calit [3 tab. 2.34 pag 156]rKdbsin u( ):=r4.748 103 = coef icient de frecare de rostogoliretratan r( ):= tr4.748 103 =|matanPt d1|
\||.:= |m0.127 =[3 tab. 2.34 pag 156]qtan |m( )tan |mtr+( ):=CanecFa60 Lh n ( )106 := Canec1.421 104 := [N] [3 tab. 2.34 pag 156]Cacatalog22.8103 := [N]CanecCacatalog P2 conditia este indeplinitaCalculul momentelor de torsiuneT10330 tPmnm := T 3.183 = [N*m]T110330 tP1n1 := T13.151 = [N*m]T210330 tP2n2 := Alegerea materialelor si a tensiunilor limita Alegerea materialelor melcului, a rotii melcate si a tratamentului termic -melcul: OLC 45 (imbunatatire + calire superficiala la 58 HRC) 7501 =ro[MPa]
Factorul zonei de contact: b :=Zh2 cos bt180|
\||.sin ot180|
\||.cos ot180|
\||.:= Zh2cos t180|
\||.sin 2 o t180|
\||. := [2 pag. 131]Zh2.418 =[2 tab. 2.1 pag. 53]Factorul regimului de functionare: Ka1 := Factorul dinamic : Kv1.2 := STAS6273 81 [2 fig. 2.39 pag.51] Factorul de repartizare a sarcinii pe latimea danturii pentru solicitarea de contact :[2 tab. 2.3 pag. 54]Kh|1 := - pentru sarcina constantaMomentul de torsiune la arborele rotii melcate :q 0.92 := - pentruz1=4T19.55 106P1n1 := T13.151 103 = [N*mm] [2 pag. 131]T2T1u q := T21.45 104 = [N*mm]or1750 :=- roata melcata : material CuZn30Al5Fe3Mn2(turnat in cochila) oi650 := [MPa] Tensiunile limita pentru solicitarea de contact , respectiv de incovoiereoHlim2190 := [MPa] oFlim2110 := [MPa] Calculul de dimensionare si verificare Numarul de inceputuri ale melcului si numarul de dinti ai rotii melcate :z14 := z2z1udat := z220 =[2 pag. 129] Raportul de angrenare real :[2 pag 129]uz2z1:= u 5 =Coeficientul diametral al melcului : q 11 := [2 tab. 4.3 pag. 125] Factorul de elasticitate al materialelor rotilor : Ze155 := Unghiul elicei de referinta : atanz1q|
\||.180t := 19.983 = [grade]
aw60.165 = [mm] awSTAS63 := STAS 6055-82 Modulul axial :mx2 awSTASq z2+:= mx4.065 = mxSTAS4 := [2 tab. 4.3 pag 125] Coeficientul diametral al melcului :- pentru mx =4avem q 11 := [2 tab. 4.3 pag 125] Coeficientul deplasarii de profil al rotii melcate :xawSTASmxSTASq z2+2 := [2 pag 125]x 0.25 = Tensiunea admisibila pentru solicitarea de contact :n2n1u:= n2600 = [rot/min]NL260 n2 Lh := NL22.34 108 = 25 107 sZn2107NL2|
\||.18:= Zn20.674 = [2 pag. 131]oHP2oHlim2Zn2 := oHP2128.115 = [MPa]Distanta axiala : x 0 :=aw0.6 1q 2 x +z2+|
\||. T2Ka Kv Kh|z2q 2 x +|
\||.13
(((ZeZhoHP2|
\||.23 := [2pag 130] [mm] da290 = da2mxSTASz22 ha + 2 x + ( ) :=[2pag 130] [mm] da152 = da1mxSTASq 2 ha + ( ) :=Diametrele cercurilor de cap[2pag 130] [mm] d280 = d2mxSTASz2 :=[mm] d146 = d1mxSTASq 2 x + ( ) :=[2pag 130]Diametrele cercurilor de divizare[mm] d0144 = d01mxSTASq :=Diametrul de referinta al melcului
v1t d1 n160 103:= v17.226 = [m/s] [2pag 121][2pag 121]v2t d2 n260 103:= v22.513 = [m/s]- treapta de precizie 8Tensiunea efectiva de contactoH0.45 Ze Zh T11q 2 x +z2+awSTAS|
\|||.3z2q 2 x + Ka Kv Kh| :=oH54.073 = [MPa] s oHP2128.115 = [MPa]Numarul de dinti ai rotii echivalente rotii melcatezn2z2cos t180|
\||.3:= zn224.095 =Factorul de forma al dintelui rotii melcate pentru solicitarea de incovoiereYFa22.3 := [2 tab. 2.3 pag 54]Factorul inclinarii dintilor pentru solicitarea de incovoiereY|1120 := Y|0.833 =da2mxSTASz22 ha + 2 x + ( ) := da290 =Diametrele cercurilor de piciordf1mxSTASq 2 ha 2 c ( ) := df134 = [mm] [2pag 130]df2mxSTASz22 ha 2 x + 2 c ( ) := df272 = [mm] [2pag 130]Diametrul exterior al rotiide2da2mxSTAS+ := de294 = [mm]Latimea rotii[2pag 130]b20.75 da1 := b239 = [mm]Lungimea melculuib1mxSTAS12.5 0.1 z2 + ( ) := b158 = [2pag 130]Viteza periferica a melcului respectiv a rotii melcate
[N*mm] Mte7.973 103 = MteT2K:=K - coeficient de corectie a MtK 1.818 = KRm3550:= 550 [MPa] = Rm[MPa] Rm31000 := - rezistenta la rupere :[N*m] T21.45 104 = - momentul de torsiune :[kW] P20.823 = - puterea :Arborele de iesire : 40Cr10[mm] D130 := h110 := de112 = alegem manset 12x30STAS 7950/2-87 [mm] de112 := de111.5 = de11.15 dc1 :=[mm] dc110 = Arborele de intrareTronsoanele pentru mansetele de etansared3 - diametrul nominal al captului de arbore la iesire[mm] dc319 := STAS 8724/3-74Mte - momentul de torsiune echivalent- rezistenta la rupere :[N*m] T13.151 103 = - momentul de torsiune :[kW] P10.99 = - puterea :Arborele de intrare, cu pinionul melcat :OLC45 (imbunatatire + calire superficiala la 58 HRC )Capete de arbori Dimensionarea si verificarea arborilor 3.6 [MPa] oFP259.999 = oFP2oFlim2YN2 :=YN20.545 = YN2106NL2|
\||.19:= NL22.34 108 =Tensiunea admisibila pentru solicitarea de incovoiereoFP271.546 := oF23.398 =d1 - diametrul nominal al captului de arbore la intrared 27.403 = [mm] dc110 := STAS 8724/3-74Mte - momentul de torsiune echivalentd316T11000t tta :=[N*mm] Mte2.222 103 = MteT1K:=K - coeficient de corectie a MtK 1.418 = KRm1550:=tta780 := 550 [MPa] =Rm[MPa] Rm1780 :=
[N*mm]d146 = [mm] d280 = [mm]T2T1u q12 := [N*mm] T21.261 104 = [N*mm]Mt1T1:= Mt13.151 103 = [N*mm]Ft12Mt1d1 := Ft1137.022 = Fa2Ft1:= Fa2137.022 = [grade] on18.884 = onatan tan ot180|
\||.cos t180|
\||.|
\||.180t :=[grade] 19.983 =[N] Fr249.872 = Fr2Ft1tan ot180|
\||. :=[N] Fr1114.705 = Fr1Ft2tan ot180|
\||. :=[N] Fa1315.15 = Fa1Ft2:= Ft2315.15 = Ft22T2d2 :=[N]Tronsoanele pentru rulmenti (fusuri)[mm] D340 := h310 := de322 = alegem manset 22x40 7950/2-87 [mm] de322 := de321.85 = de31.15 dc3 :=[mm] dc319 = Arborele de iesireT13.151 103 =o 20 := q120.8 := u 5 = Fortele din angrenaj[mm] dr325 := [mm] de322 = Arborele de iesire : [mm] dr115 := [mm] de112 = Arborele de intrare : 3.7.Verificarea rulmentilor la durabilitate Arborele de intrare rulment seria 7302:STAS 7416-80 P = 1358[N] C = 8050 [N]Cef = 1.175 x C Cef = 2.397 x 104 [N] L = (C ef / P)xPx106 L = 2.397 x 1010 [rot]
os15.007 = os4 T1dc1h1 l1:=Verificarea la strivire[mm] r20.16 :=[mm]r10.25 := raza de racordare :[mm] t212.8 :=butuc :[mm] t113.8 := arbore : adncimea :[mm]materialOL 60 STAS 500/2-80 Dimensiunile penei panA 6x6x36 STAS 1004-81 [mm] dc3 = Arborele de iesire[MPa] taf65 := s [MPa] tf7.504 = tf2 T1b1l1 dc1:=Verificarea la forfecare [MPa] oas70 := s [MPa]Arborele de intrare3.8 Calculul penelor si al canalelor de panL>Lnec[rot] Lnec 2.34 108 = Lnec Lh60 n2 :=[rot] L 2.397 1010 =LCefP|
\||.P 106 :=[N] Cef2.397 104 =Cef1.175 C :=[N] C 20400 := [N] P 1358 := STAS 3920-80 Arborele de iesire : rulment seria 32005b 6 := ltimea :Dimensiunile canalului de pan[mm] l114 := lungimea :[mm] h16 := nltimea :[mm] b16 := ltimea :forma :ADimensiunile peneimaterialOL 60 STAS 500/2-80panA 6x6x14 STAS 1004-81 [mm] dc110 =
[mm]butuc :t233.2 := [mm]raza de racordare : r10.4 :=[mm]r20.25 := [mm]Verificarea la strivireos4 T2dc3h3 l3:= os9.478 = [MPa] s oas70 := [MPa] Verificarea la forfecaretf2 T2b3l3 dc3:= tf4.147 = [MPa] s taf65 := [MPa] Arborele de iesiredc319 = [mm] panA 10x8x40 STAS 1004-81Dimensiunile peneimaterialOL 60 STAS 500/2-80forma :Altimea : b38 := [mm]nltimea : h37 := [mm]lungimea : l340 := [mm]Dimensiunile canalului de pan ltimea : b 8 := [mm]adncimea : arbore : t133.7 := 3.9. Alegerea ghidajului. Datoritnecesitiirealizriideplasrimoduluipeverticalcuopreciziefoartemaream ales ca variant constructiv a ghidajului, un ghidaj seria: LSAGF22800 (fig.2.6) format din dou bare foarte precis realizate pe care ruleaz cte o buc cu bile. Avantajeleacestuighidajsuntaceleacnlocuietefrecareadealunecarecurostogolirea bilelor din buci, micornd pierderile care aveau loc prin frecarea ntr-un alt tip de ghidaj. Ghidajul a fost ales din catalogul firmei ONDRIVES i are urmatoarele caracteristici: Lungime: 600 mm Diametru: 22 [mm] Capacitate dinamic: 15400 [N] Capacitate static: 23200 [N]