Proiect Multimedia
15
1 UNIVERSITATEA ³ A UREL VLAICU ´, ARAD PROIECT Multimedia Prezentare Matlab ARAD, 2011 CUPRINS
-
Upload
flavius-falcon -
Category
Documents
-
view
104 -
download
0
Transcript of Proiect Multimedia

5/14/2018 Proiect Multimedia - slidepdf.com
http://slidepdf.com/reader/full/proiect-multimedia 1/15
1
UNIVERSITATEA ³ AUREL VLAICU ´, ARAD
PROIECT
Multimedia
Prezentare Matlab
ARAD,
2011
CUPRINS
5/14/2018 Proiect Multimedia - slidepdf.com
http://slidepdf.com/reader/full/proiect-multimedia 2/15
2
1. Cuvinte cheie..................................................... 3
2. Introducere........................................................ 43. Prezentare teoretic........................................... 54. Implementare.....................................................75. Rezultate............................................................96. Concluzii..........................................................14
7. Bibliografie......................................................15
5/14/2018 Proiect Multimedia - slidepdf.com
http://slidepdf.com/reader/full/proiect-multimedia 3/15
3
1. Cuvinte cheie
y Regulator
y PID
y Motor
y Turaie
y
Parametri
y Reglare
y MATLAB
2. Introducere

5/14/2018 Proiect Multimedia - slidepdf.com
http://slidepdf.com/reader/full/proiect-multimedia 4/15
4
Lucrarea de fa urmrete sa studieze implementarea în MATLABSimulink a unui motor de current continuu i testarea mai multor modaliti deajustare a regulatorului PID în funcie de datele tehnice ale motorului i
regimurile de exploatare.Maina de curent continuu este o main electric cu dou înfurri,una plasat în stator, numit înfurarea de excitaie i cealalt în rotor,numit înfurarea indusului, ambele fiind parcurse de curent continuu.
Maina de curent continuu (MCC) este folosit în general ca motor,având proprieti foarte bune i simple privind reglarea turaiei.
Ecuaiile folosite :
Cu ajutorul acestui sistem de ecuaii se construieste în Matlab/Simulink modelul motorului de curent continuu cu excitaie derivaie pentru simulareafuncionrii acestuia.
3. Prezentare teoretic
±±°
±±̄
®
;!
;!
dt
d J M iC
C dt
di
Li Ru
m E
E ii

5/14/2018 Proiect Multimedia - slidepdf.com
http://slidepdf.com/reader/full/proiect-multimedia 5/15
5
Pentru compensarea dezavantajelor regulatoarelor PI, efectului integrativ ise poate aduga efectul complementar: cel derivativ. Rezult o structur dereglare fundamental: regulatorul proporional-integrativ-derivativ liniar PID,cu legea de reglare:
FT (funcia de transfer) a regulatorului PID este prin urmare:
Cei trei parametri de ajustare ai regulatoarelor PID sunt: constanta de proporionalitate KP, constanta de timp de integrare TI i constanta de timpderivare TD .
Structura PID este fundamental, întrucât ine cont în acelai timp:y de istoria sistemului, prin componenta integrativ I;y de situaia prezent, prin componenta proporional P;y de estimarea evoluiei viitoare, prin componenta derivativ D.
Algoritmul de reglare PID liniar este algoritmul clasic din automatic caredac este corect implementat i funcioneaz într-un proces compatibil asigur performane foarte bune cu cheltuieli minime. În esen toate aciunile dereglare pot fi reduse la un algoritm PID.
P artea proporional P este cea mai important i ia în considerarecomportamentul sistemului în momentul deciziei. Este foarte greu de imaginatun regulator fr P.
P artea integrativ I este efectul prin care lum în considerare trecutulsistemului.Dac avem eroare mic, dar constant în timp, prin cumulare regulatorul ajunge
s poat aplica o aciune de corecie suplimentar în sensul anulrii erorii.Principala problem creat de efectul integrativ este o întârziere general aaciunii de reglare i posibilitatea saturrii regulatorului.
Efectul derivativ D ne permite s estimm evoluia viitoare a eroriisistemului de reglare i s obinem un efect de tip predictiv, care va accelera
5/14/2018 Proiect Multimedia - slidepdf.com
http://slidepdf.com/reader/full/proiect-multimedia 6/15
6
comportamentul sistemului i va îmbunti substanial rejecia perturbaiilor.
Orice algoritm de reglare, chiar dac pare diferit, poate fi redus la unalgoritm PID. Putem afirma c cea mai mare parte a automaticii deterministeconst în dezvoltri, perfecionri i adaptri a regulatorului PID.
În funcie de caz regulatorul PID poate fi studiat dup criteriul adaptivsau neliniar.Cea mai important parte a muncii în acest domeniu o constituie alegerea celeimai avantajoase configuraii i mai ales ajustarea cât mai bun a regulatorului.
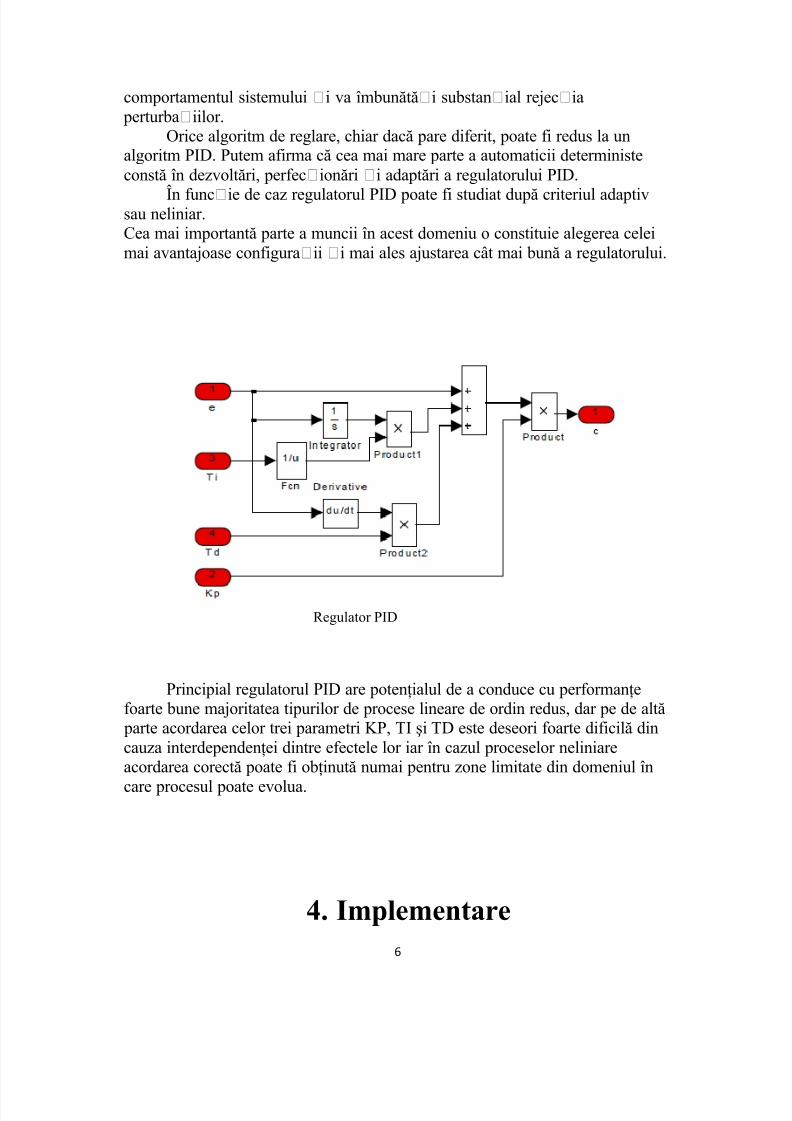
Regulator PID
Principial regulatorul PID are potenialul de a conduce cu performanefoarte bune majoritatea tipurilor de procese lineare de ordin redus, dar pe de alt parte acordarea celor trei parametri KP, TI i TD este deseori foarte dificil dincauza interdependenei dintre efectele lor iar în cazul proceselor neliniareacordarea corect poate fi obinut numai pentru zone limitate din domeniul în
care procesul poate evolua.
4. Implementare
5/14/2018 Proiect Multimedia - slidepdf.com
http://slidepdf.com/reader/full/proiect-multimedia 7/15
7
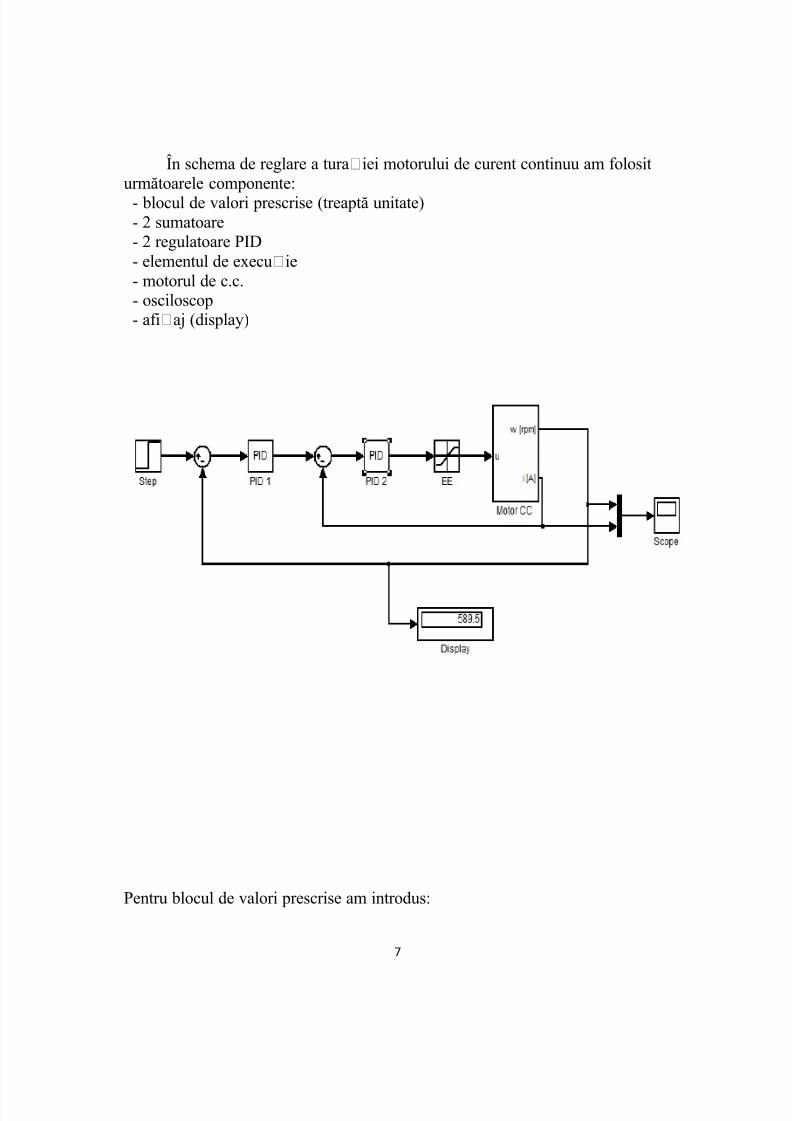
În schema de reglare a turaiei motorului de curent continuu am folositurmtoarele componente:
- blocul de valori prescrise (treapt unitate)- 2 sumatoare- 2 regulatoare PID- elementul de execuie- motorul de c.c.- osciloscop- afiaj (display)
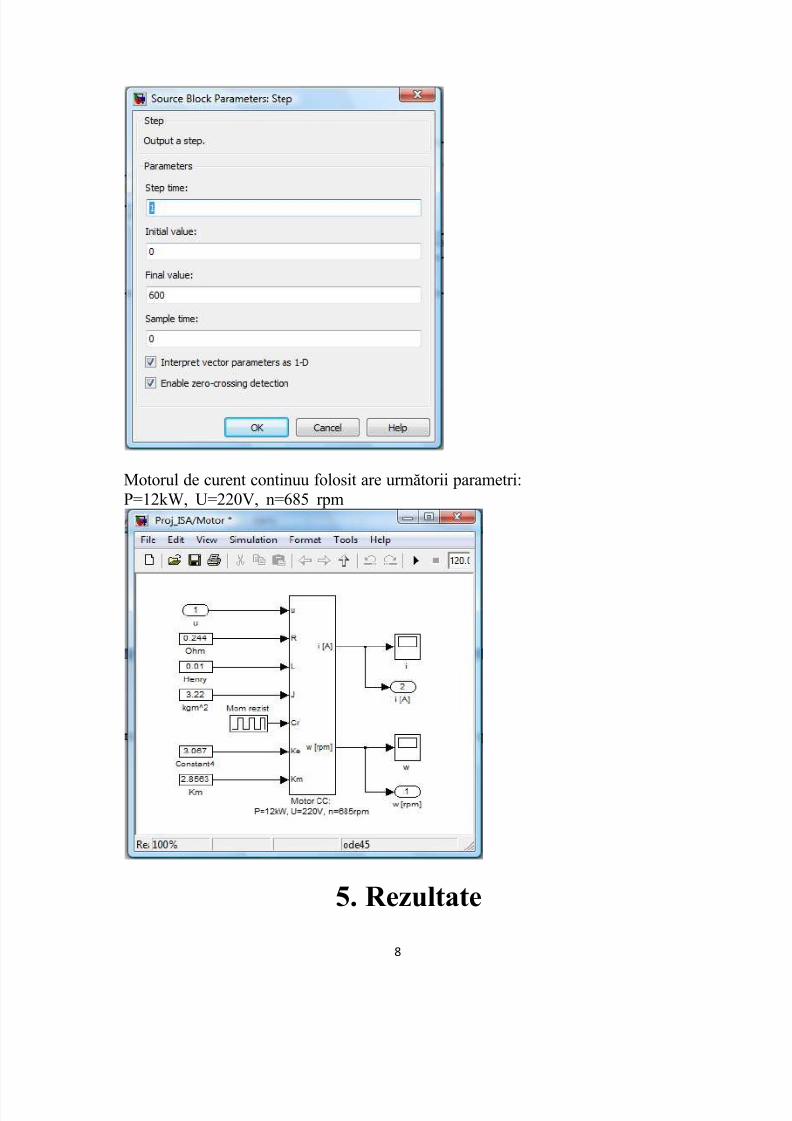
Pentru blocul de valori prescrise am introdus:
5/14/2018 Proiect Multimedia - slidepdf.com
http://slidepdf.com/reader/full/proiect-multimedia 8/15
8
Motorul de curent continuu folosit are urmtorii parametri:P=12kW, U=220V, n=685 rpm
5. Rezultate
5/14/2018 Proiect Multimedia - slidepdf.com
http://slidepdf.com/reader/full/proiect-multimedia 9/15
9
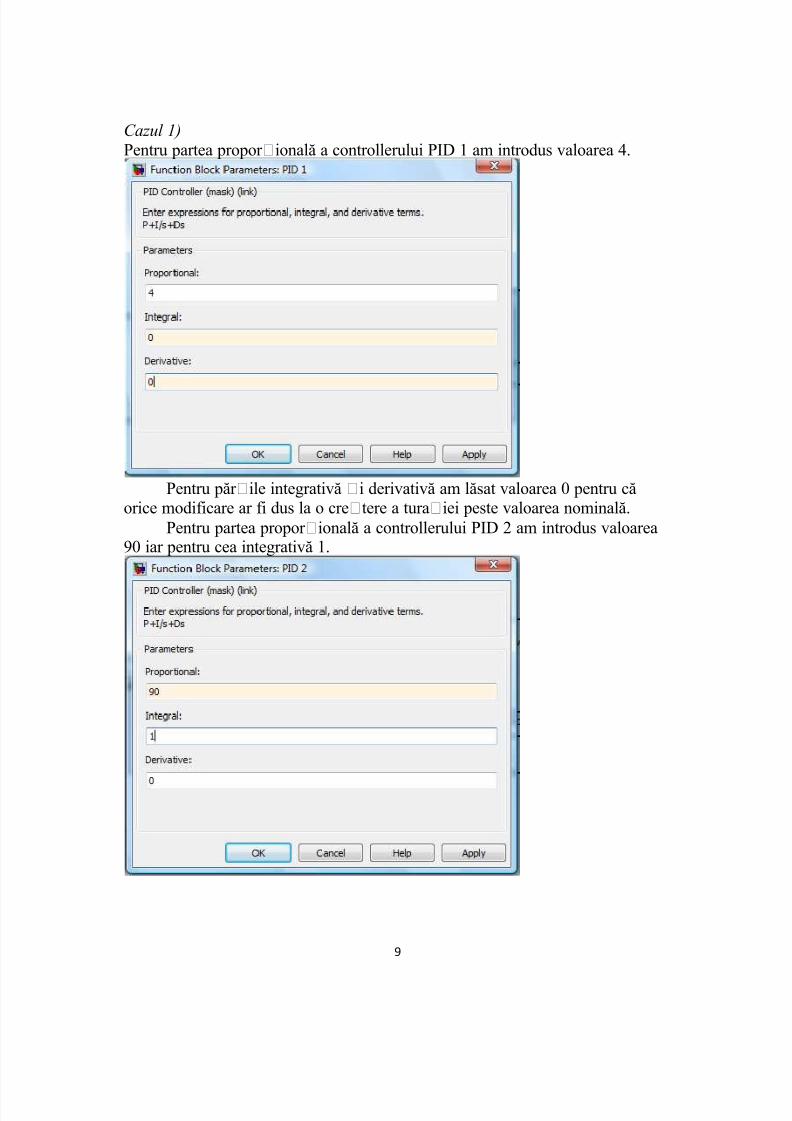
Cazul 1)
Pentru partea proporional a controllerului PID 1 am introdus valoarea 4.
Pentru prile integrativ i derivativ am lsat valoarea 0 pentru corice modificare ar fi dus la o cretere a turaiei peste valoarea nominal.
Pentru partea proporional a controllerului PID 2 am introdus valoarea90 iar pentru cea integrativ 1.

5/14/2018 Proiect Multimedia - slidepdf.com
http://slidepdf.com/reader/full/proiect-multimedia 10/15
10
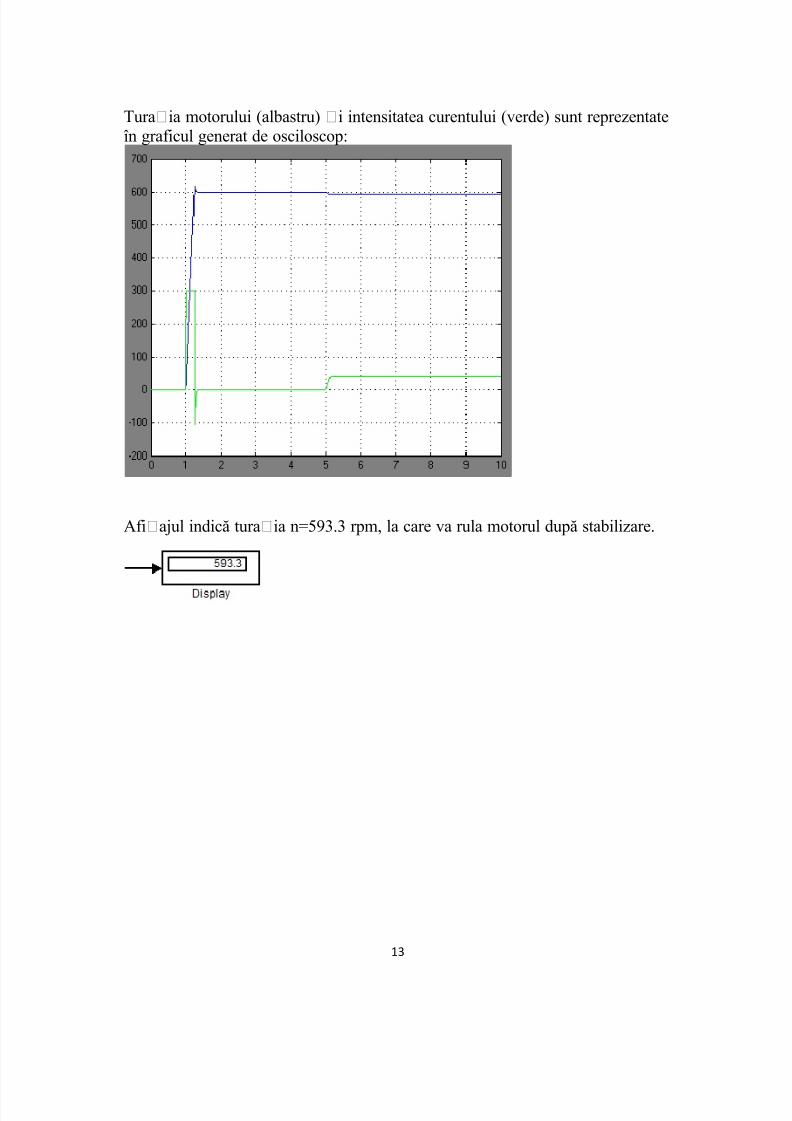
Turaia motorului (albastru) i intensitatea curentului (verde) suntreprezentate în graficul generat de osciloscop:
Afiajul indic turaia n=589.6 rpm, la care va rula motorul dup stabilizare.
Cazul 2)
Pentru partea proporional a controllerului PID 1 am introdus valoarea 5.
5/14/2018 Proiect Multimedia - slidepdf.com
http://slidepdf.com/reader/full/proiect-multimedia 11/15
11
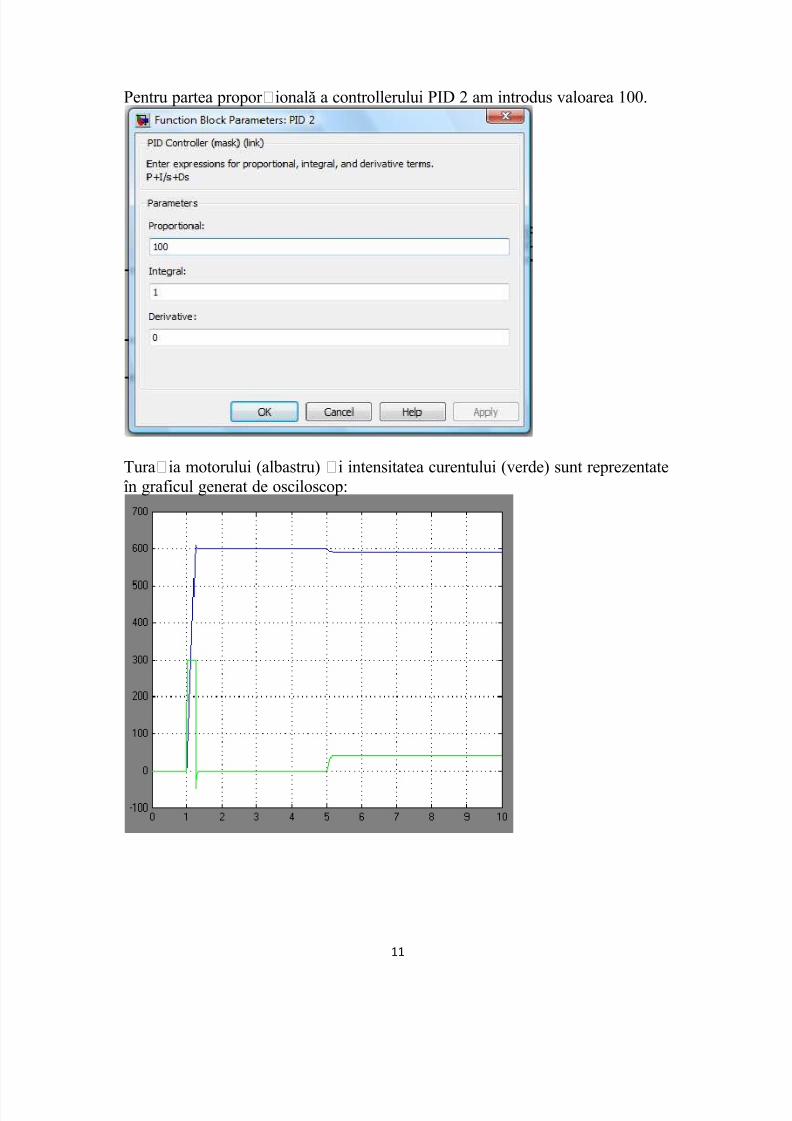
Pentru partea proporional a controllerului PID 2 am introdus valoarea 100.
Turaia motorului (albastru) i intensitatea curentului (verde) sunt reprezentateîn graficul generat de osciloscop:

5/14/2018 Proiect Multimedia - slidepdf.com
http://slidepdf.com/reader/full/proiect-multimedia 12/15
12
Afiajul indic turaia n=591.8 rpm, la care va rula motorul dup stabilizare.
Cazul 3)Pentru partea proporional a controllerului PID 1 am introdus valoarea 6.
Pentru partea proporional a controllerului PID 2 am introdus valoarea 110.
5/14/2018 Proiect Multimedia - slidepdf.com
http://slidepdf.com/reader/full/proiect-multimedia 13/15
13
Turaia motorului (albastru) i intensitatea curentului (verde) sunt reprezentateîn graficul generat de osciloscop:
Afiajul indic turaia n=593.3 rpm, la care va rula motorul dup stabilizare.
5/14/2018 Proiect Multimedia - slidepdf.com
http://slidepdf.com/reader/full/proiect-multimedia 14/15
14
6. Concluzii
În primul caz, în timpul procesului de reglare turaia nu depetevaloarea turaiei nominale, dar intensitatea curentului scade pân la -267,5A.
În cel de-al doilea caz, turaia nu depete niciun moment valoarea de
610 rpm, ajungând la o valoare stabil de 591,8 rpm. De asemenea, intensitateacurentului scade doar pân la -48A.În cel de-al treilea caz, turaia ajunge la un maxim de 620 rpm. Dei
stabilizarea se realizeaz la 593,3 rpm, intensitatea curentului scade pân la-105A.
În concluzie, reglarea optim este cea din cazul doi, suprareglajulregulatorului PID fiind cel mai mic în ceea ce privete intensitatea curentului.
Turaia este mai mic decât în cazul trei, dar se prefer acest compromisdatorit limitrii supracurenilor care apar în timpul pornirii motorului.Aceast limitare este realizat de bucla de curent, care este subordonat bucleide turaie.
5/14/2018 Proiect Multimedia - slidepdf.com
http://slidepdf.com/reader/full/proiect-multimedia 15/15
15
BIBLIOGRAFIE
[1] Marius Bla, Note de Curs ISA , 2010
[2] Valentin Mller, Curs Maini i Acionri
Electrice, Editura Aurel Vlaicu, 2009