
Procesarea Imaginilor - Curs 3etc.unitbv.ro/~csaba.kertesz/pds/curs/PI-curs03.pdf · Filtrarea...
29
Procesarea Digitală a Semnalelor și a Imaginii Procesarea Digitală a Semnalelor și a Imaginii Procesarea Imaginilor Procesarea Imaginilor – – curs 3 – curs 3 – Universitatea Transilvania Brașov Facultatea de Inginerie Electrică și Știința Calculatoarelor Departamentul de Electronică și Calculatoare 2012.05.28 ș.l. dr. ing. Kertész Csaba-Zoltán
Transcript of Procesarea Imaginilor - Curs 3etc.unitbv.ro/~csaba.kertesz/pds/curs/PI-curs03.pdf · Filtrarea...
Procesarea Digitală a Semnalelor și a ImaginiiProcesarea Digitală a Semnalelor și a Imaginii
Procesarea ImaginilorProcesarea Imaginilor
– – curs 3 –curs 3 –
Universitatea Transilvania BrașovFacultatea de Inginerie Electrică și Știința CalculatoarelorDepartamentul de Electronică și Calculatoare
2012.05.28 ș.l. dr. ing. Kertész Csaba-Zoltán
Filtrarea imaginilorFiltrarea imaginilor
● filtrarea imaginilor este o operație de îmbunătățire cu principalul scop de a elimina zgomotul suprapus imaginii
● pentru a restaura valoarea unui pixel afectat de zgomot trebuie estimat valoarea folosind și pixelii adiacenți
● operație pe vecinătate
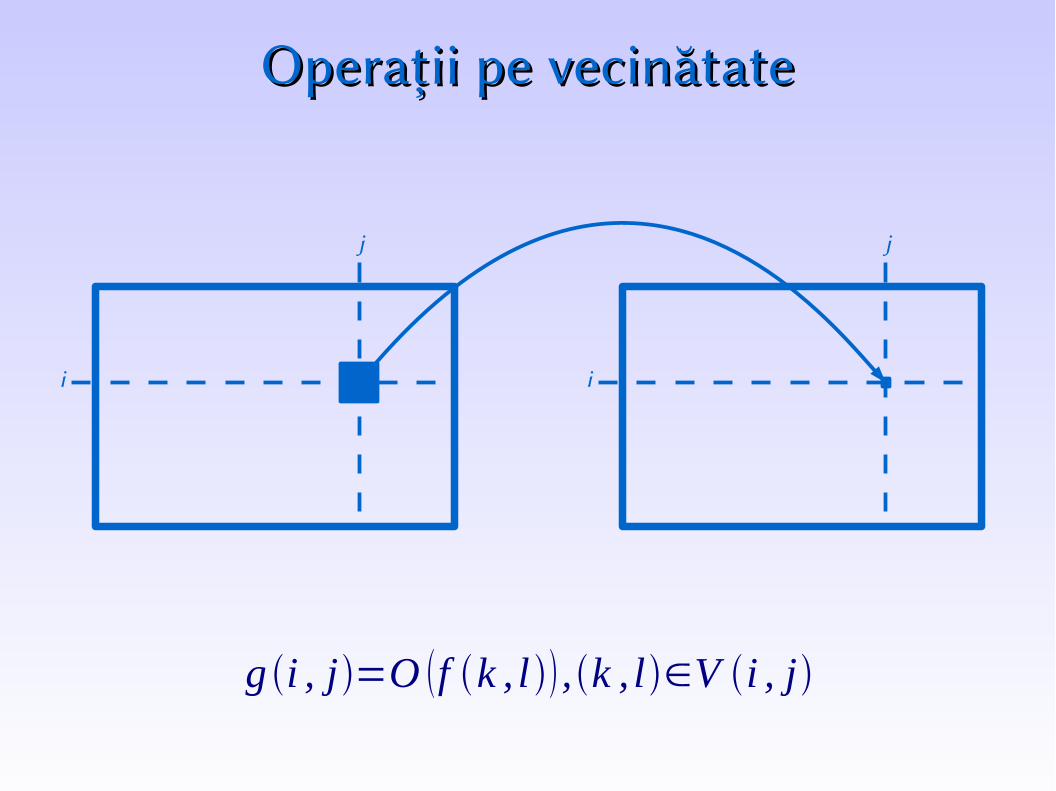
Operații pe vecinătateOperații pe vecinătate
i
j
i
j
g i , j=O f k , l ,k , l∈V i , j
Filtrarea liniară a imaginilorFiltrarea liniară a imaginilor
● fiind date două imagini f1(x,y) și f
2(x,y), și două
numere reale α și β, se numește operator liniar, un operator O care are următoarea proprietate:
● noua valoare a unui pixel este o combinație liniară a pixelilor dintr-o vecinătate a pixelului din imaginea originală
O [⋅f 1⋅f 2]=⋅O [ f 1]⋅O [ f 2]
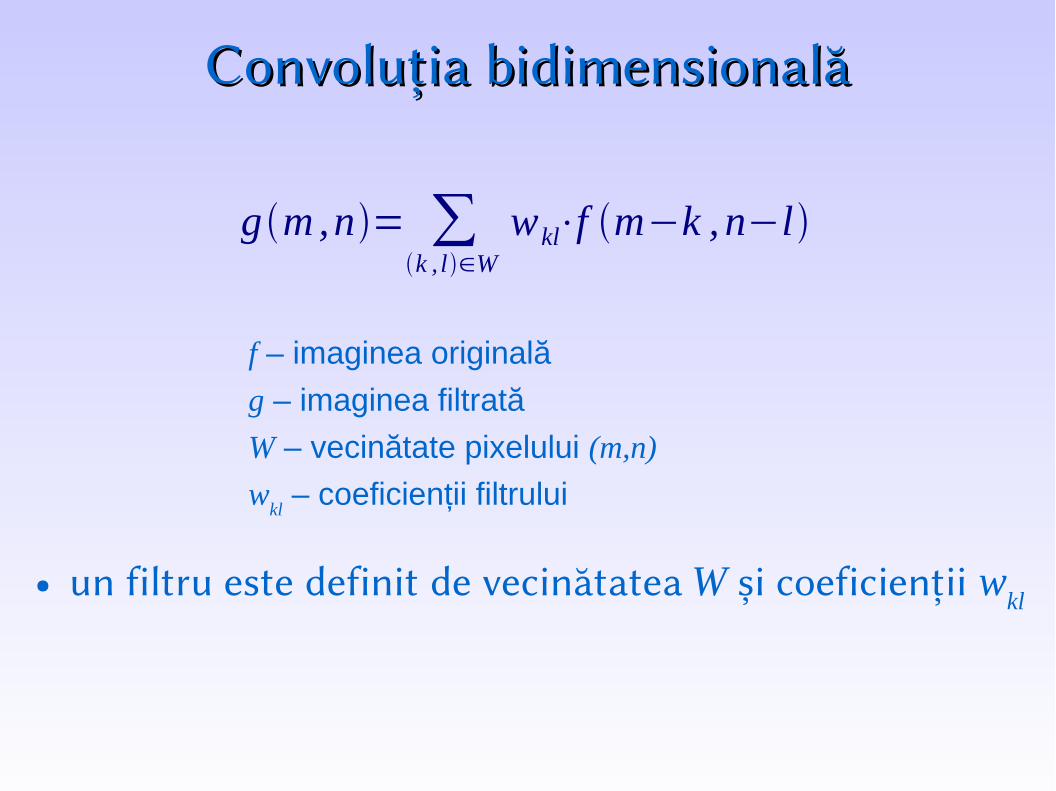
Convoluția bidimensionalăConvoluția bidimensională
f – imaginea originală
g – imaginea filtrată
W – vecinătate pixelului (m,n)
wkl – coeficienții filtrului
● un filtru este definit de vecinătatea W și coeficienții wkl
gm,n= ∑k , l∈W
wkl⋅f m−k , n−l
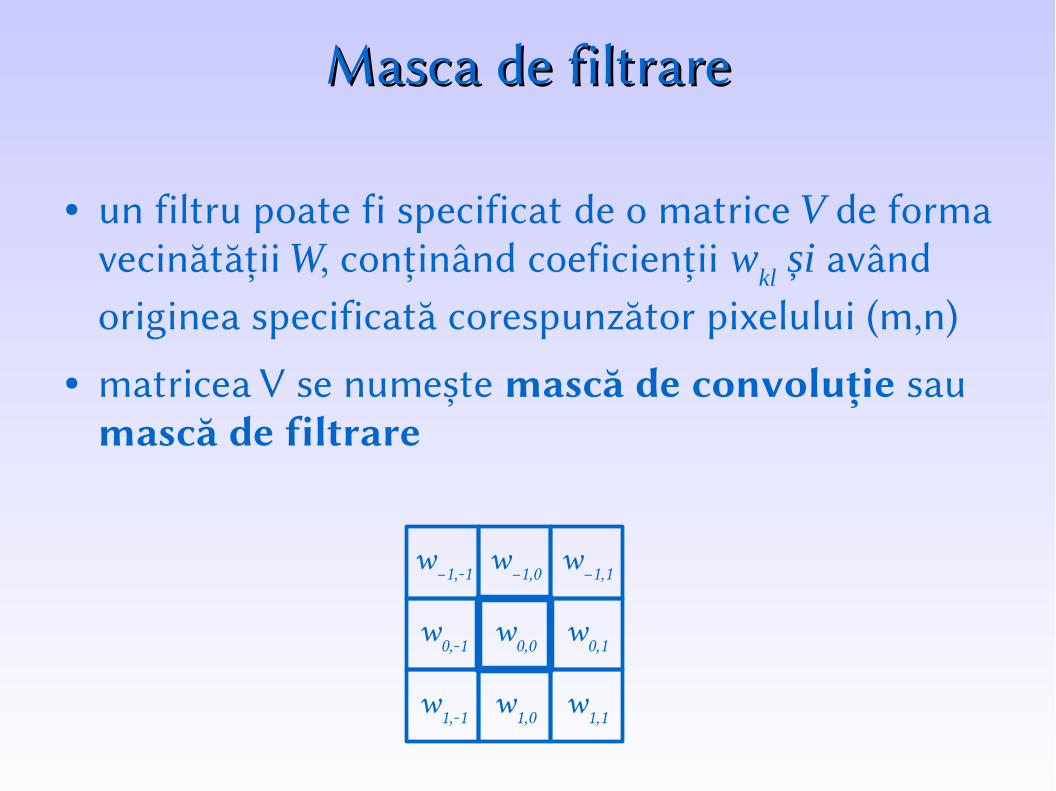
Masca de filtrareMasca de filtrare
● un filtru poate fi specificat de o matrice V de forma vecinătății W, conținând coeficienții w
kl și având
originea specificată corespunzător pixelului (m,n)● matricea V se numește mască de convoluție sau
mască de filtrare
w-1,-1 w-1,0 w-1,1
w0,-1 w0,0 w0,1
w1,-1 w1,0 w1,1
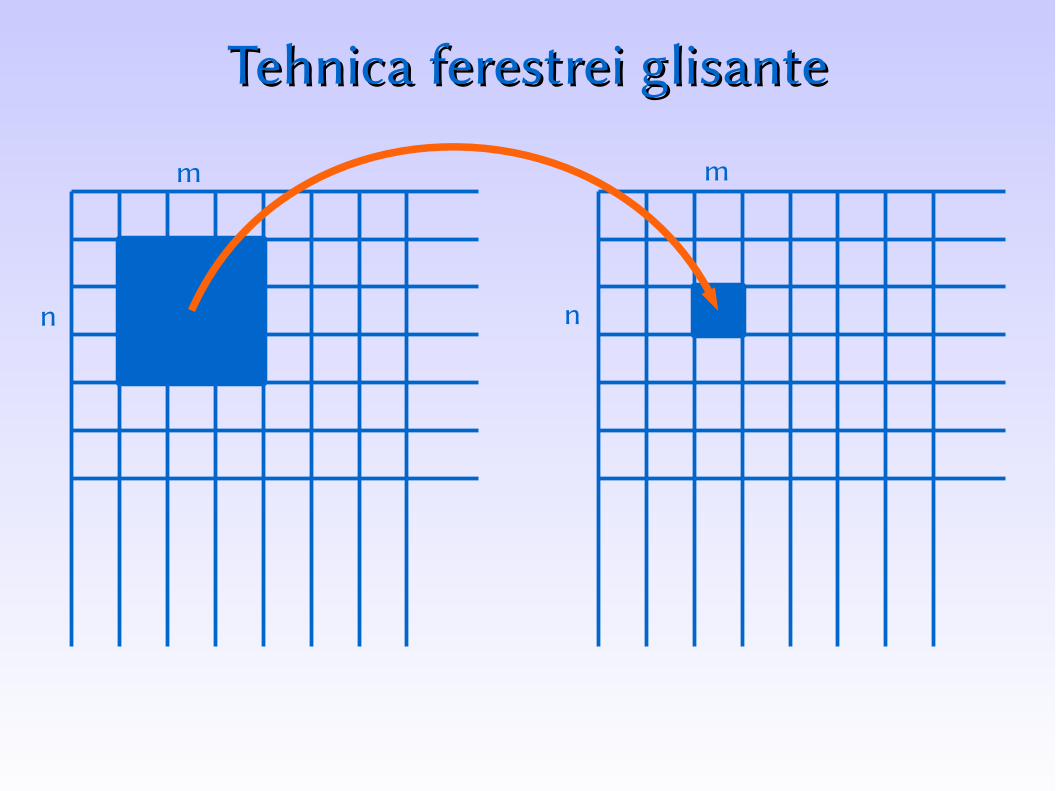
Tehnica ferestrei glisanteTehnica ferestrei glisante
m
n
m
n
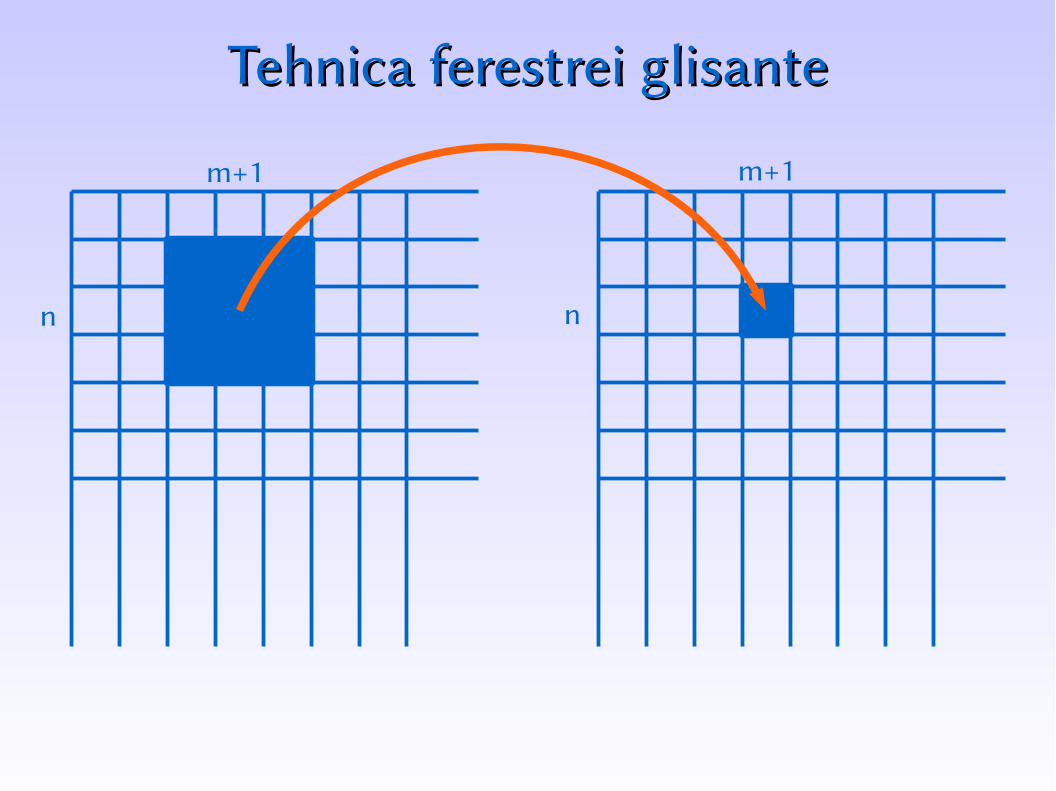
Tehnica ferestrei glisanteTehnica ferestrei glisante
m+1
n
m+1
n
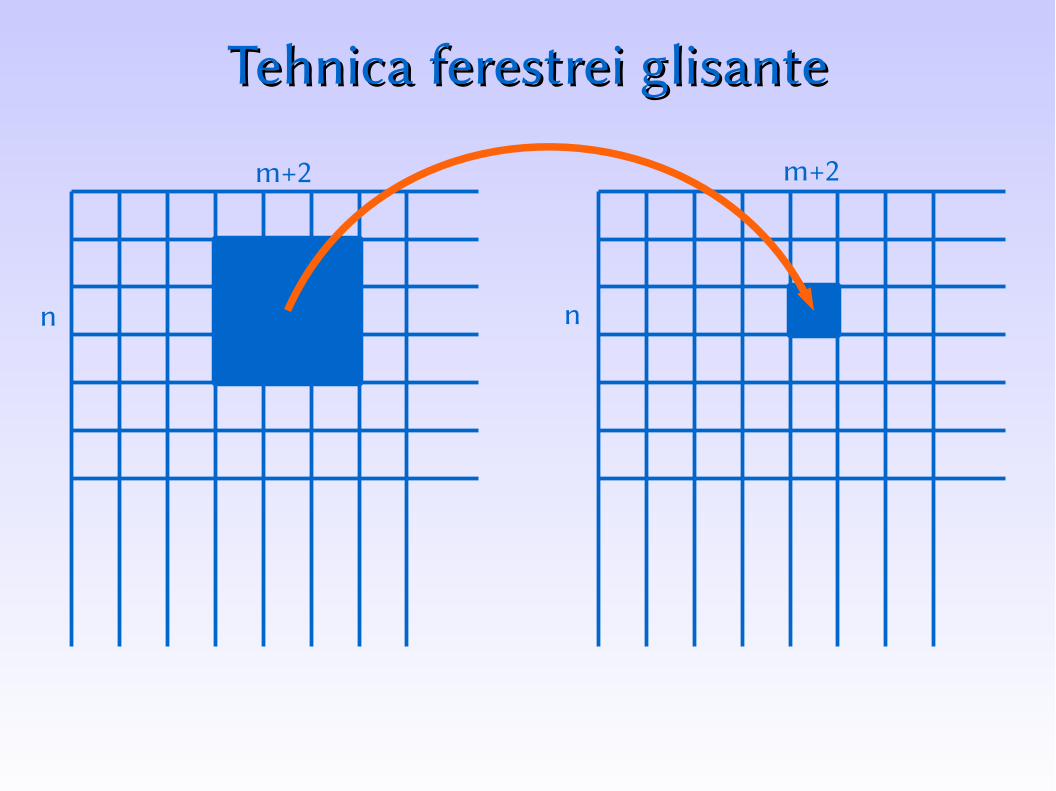
Tehnica ferestrei glisanteTehnica ferestrei glisante
m+2
n
m+2
n
Filtre de netezireFiltre de netezire
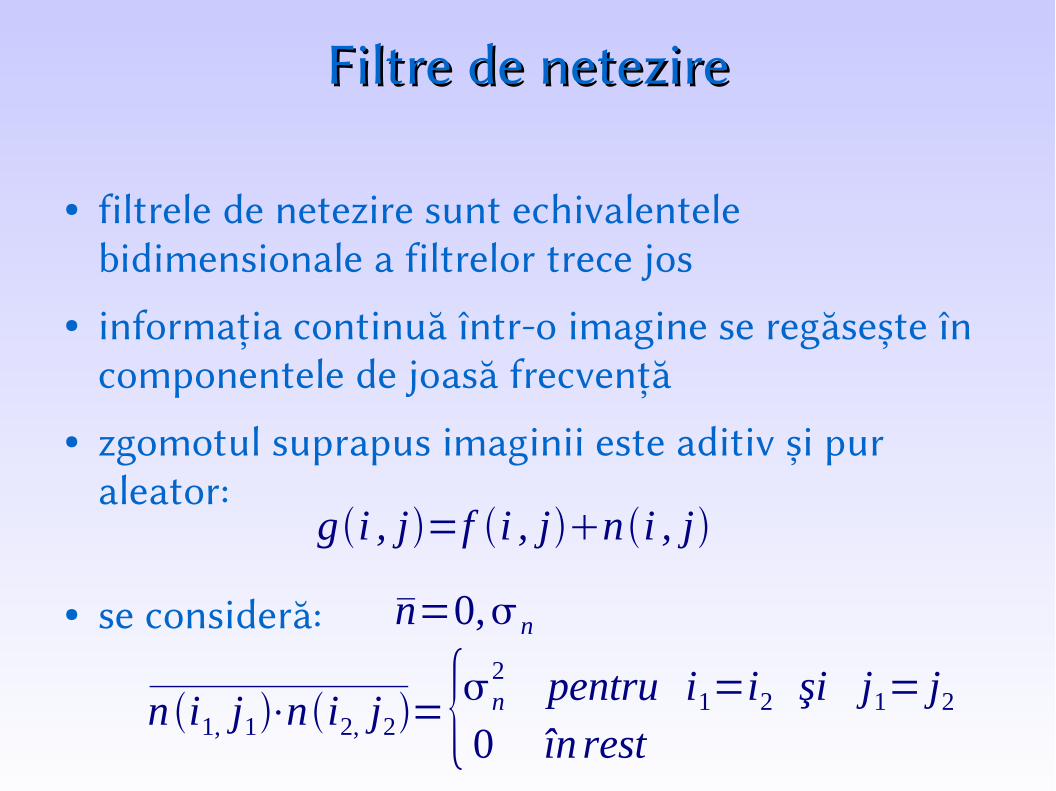
● filtrele de netezire sunt echivalentele bidimensionale a filtrelor trece jos
● informația continuă într-o imagine se regăsește în componentele de joasă frecvență
● zgomotul suprapus imaginii este aditiv și pur aleator:
● se consideră:
gi , j=f i , jni , j
n=0, n
n i1, j1⋅ni2, j2={n2 pentru i1=i2 şi j1= j2
0 în rest

Zgomot aditivZgomot aditiv
Condiția de normare a coeficienților Condiția de normare a coeficienților filtrelor de netezirefiltrelor de netezire
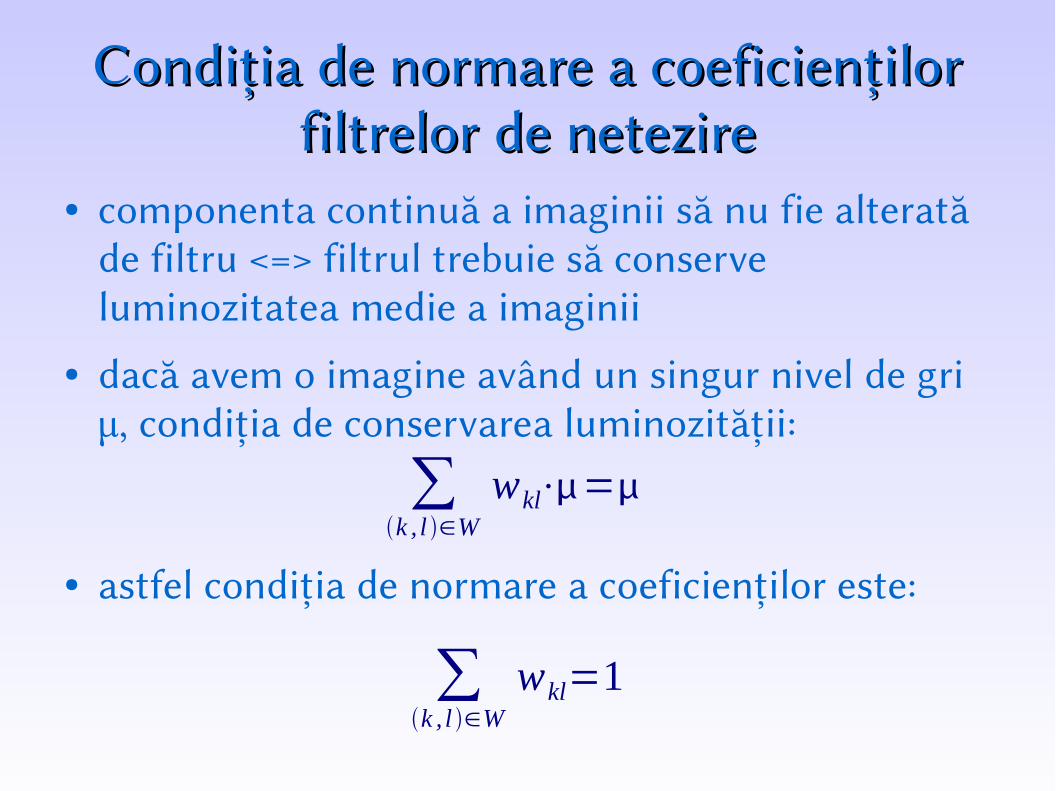
● componenta continuă a imaginii să nu fie alterată de filtru <=> filtrul trebuie să conserve luminozitatea medie a imaginii
● dacă avem o imagine având un singur nivel de gri µ, condiția de conservarea luminozității:
● astfel condiția de normare a coeficienților este:
∑k , l ∈W
wkl⋅=
∑k , l ∈W
wkl=1
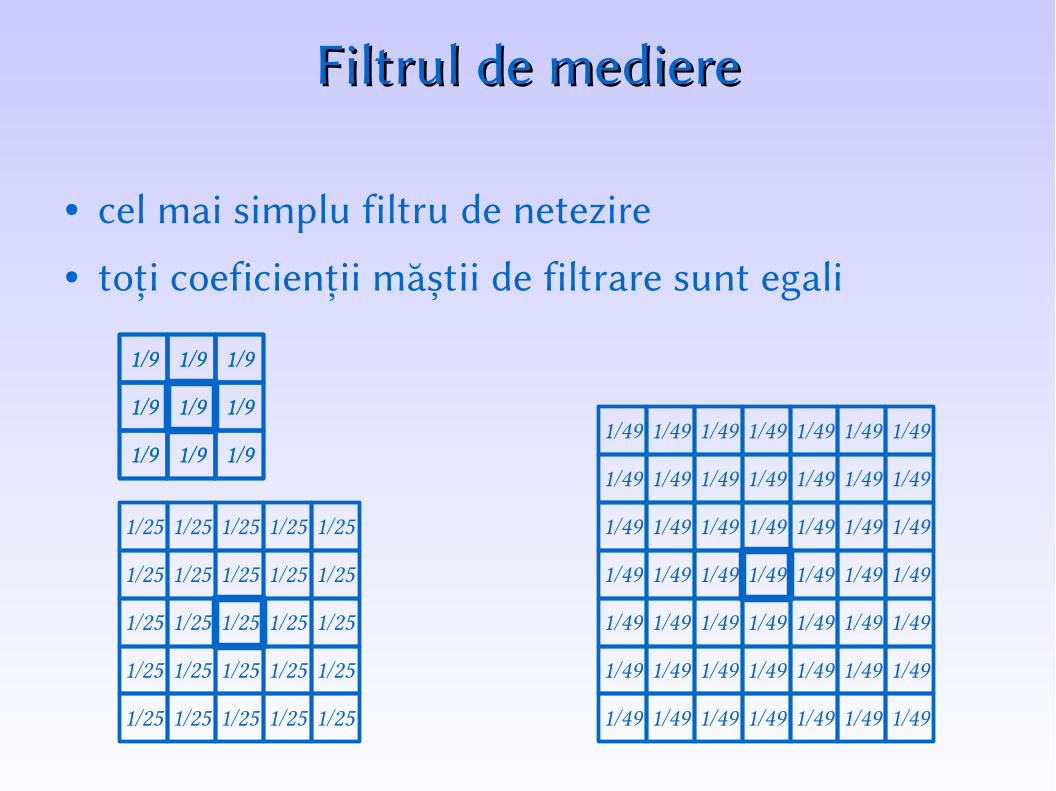
Filtrul de mediereFiltrul de mediere
● cel mai simplu filtru de netezire● toți coeficienții măștii de filtrare sunt egali
1/9 1/9 1/9
1/9 1/9 1/9
1/9 1/9 1/9
1/9 1/9 1/9
1/9 1/9 1/9
1/9 1/9 1/9
1/25 1/25 1/25 1/25 1/25
1/25 1/25 1/25 1/25 1/25
1/25 1/25 1/25 1/25 1/25
1/25 1/25 1/25 1/25 1/25
1/25 1/25 1/25 1/25 1/25
1/49 1/49 1/49 1/49 1/49 1/49 1/49
1/49 1/49 1/49 1/49 1/49 1/49 1/49
1/49 1/49 1/49 1/49 1/49 1/49 1/49
1/49 1/49 1/49 1/49 1/49 1/49 1/49
1/49 1/49 1/49 1/49 1/49 1/49 1/49
1/49 1/49 1/49 1/49 1/49 1/49 1/49
1/49 1/49 1/49 1/49 1/49 1/49 1/49
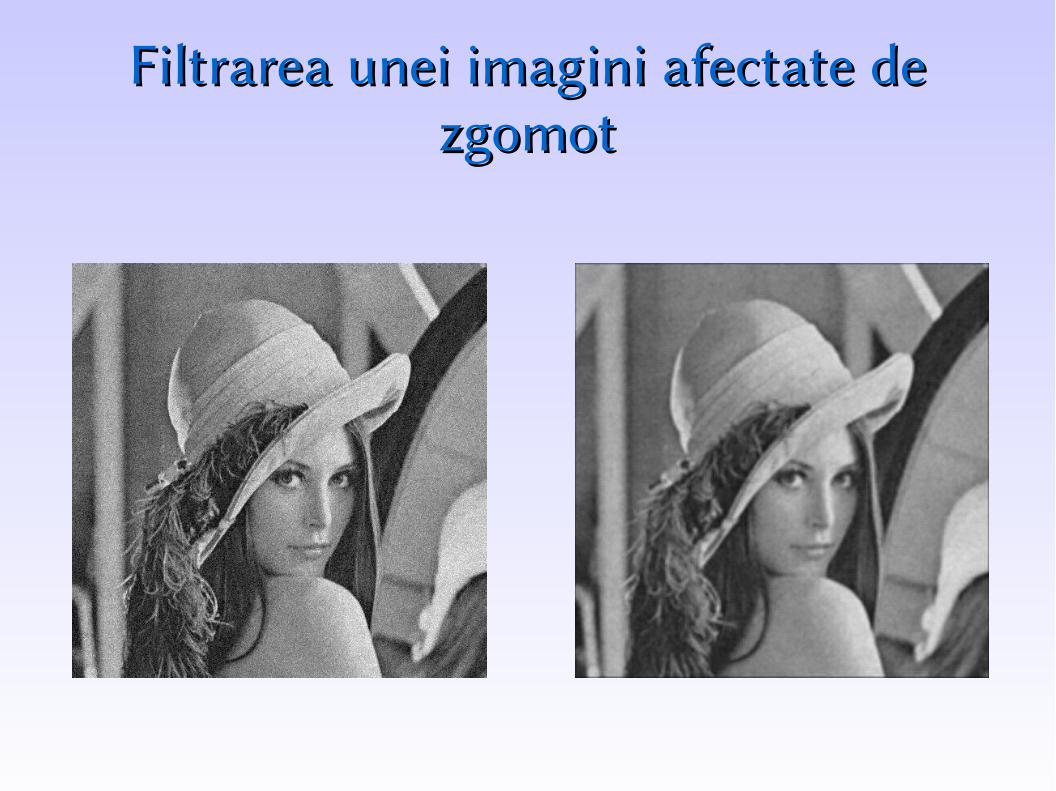
Filtrarea unei imagini afectate de Filtrarea unei imagini afectate de zgomotzgomot
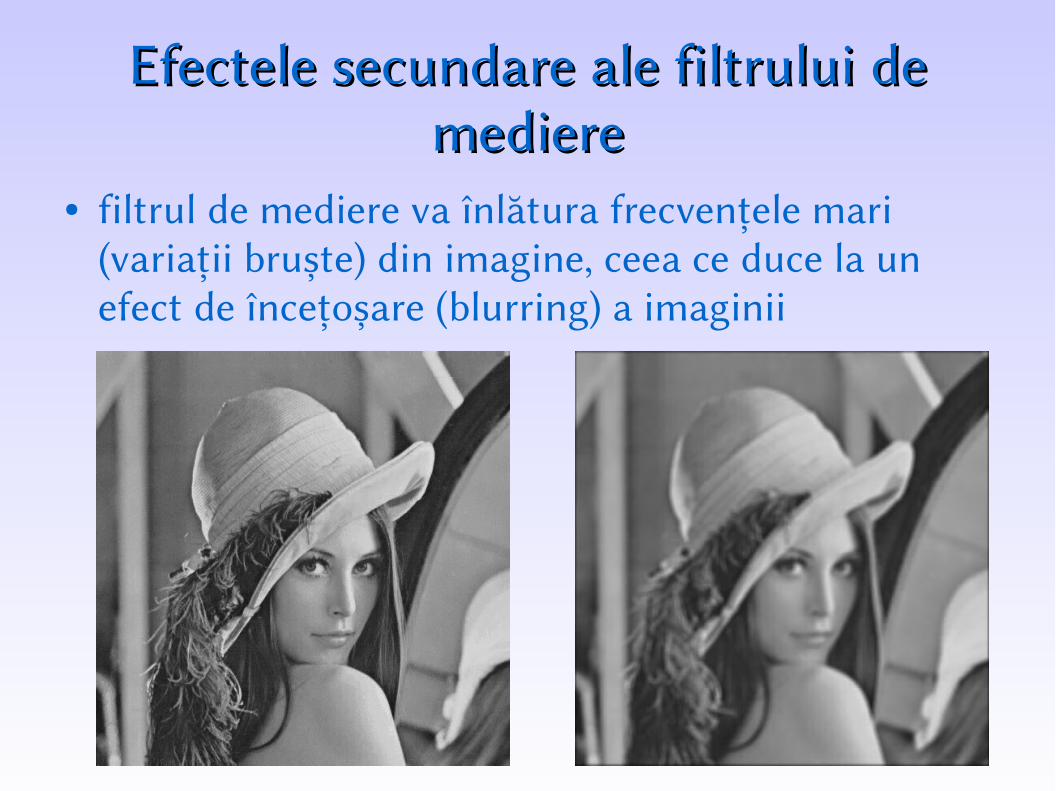
Efectele secundare ale filtrului de Efectele secundare ale filtrului de medieremediere
● filtrul de mediere va înlătura frecvențele mari (variații bruște) din imagine, ceea ce duce la un efect de încețoșare (blurring) a imaginii
Considerații asupra filtrului de mediereConsiderații asupra filtrului de mediere
● din punctul de vedere al zgomotului, pentru filtrare este utilă o mască de filtrare cât mai mare
● din punctul de vedere al semnalului util este util o mască de filtrare cât mai mică
● de obicei în practică filtrarea de mediere nu este folosită pentru filtrarea zgomotului din cauza degradării semnalului util, ci numai pentru realizarea de efecte speciale asupra imaginii (blur)
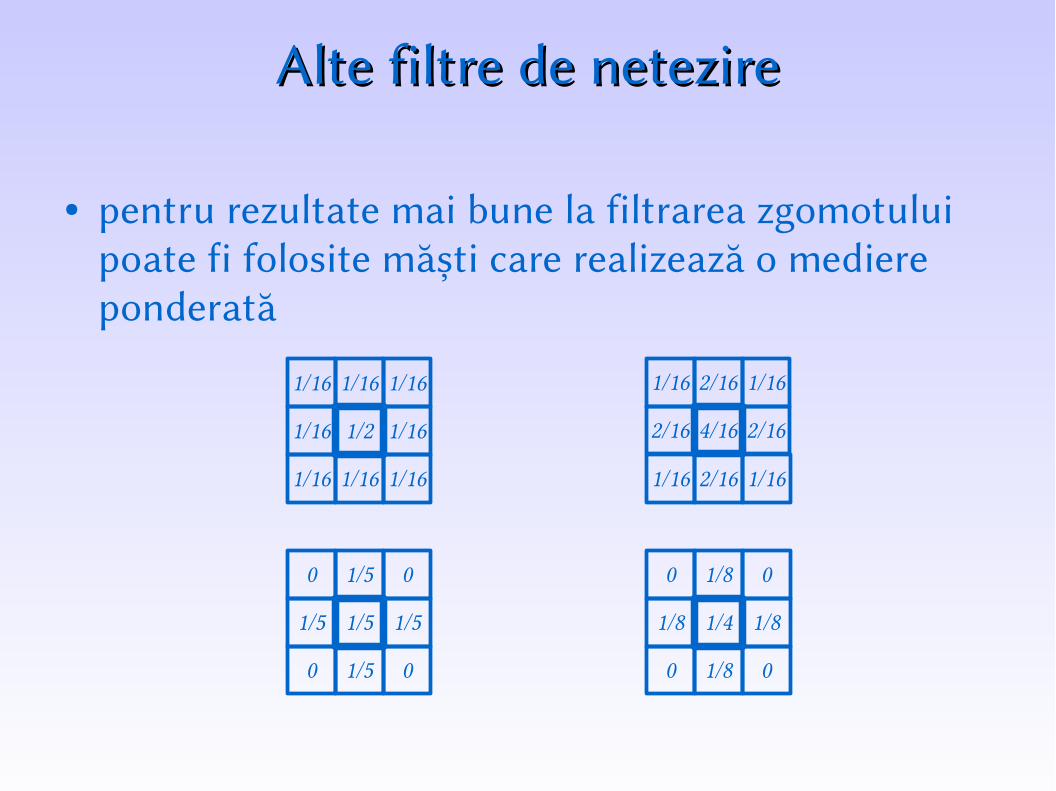
Alte filtre de netezireAlte filtre de netezire
● pentru rezultate mai bune la filtrarea zgomotului poate fi folosite măști care realizează o mediere ponderată
1/16 1/16 1/16
1/16 1/2 1/16
1/16 1/16 1/16
1/16 2/16 1/16
2/16 4/16 2/16
1/16 2/16 1/16
0 1/8 0
1/8 1/4 1/8
0 1/8 0
0 1/5 0
1/5 1/5 1/5
0 1/5 0
Filtre de detecție a contururilorFiltre de detecție a contururilor
● filtrele de detecție a contururilor sunt echivalente bidimensionale ale filtrelor trece sus
● prin eliminarea componentei continue în imagine rămân numai zonele de frecvență înaltă (variații bruște ale luminanței) ceea ce corespunde cu conturul obiectelor din imagine
Condiția de normare a coeficienților Condiția de normare a coeficienților filtrelor trece susfiltrelor trece sus
● componenta continuă a imaginii trebuie rejectată de filtru
● dacă avem o imagine având un singur nivel de gri µ, condiția de eliminare a luminozității:
● astfel condiția de normare a coeficienților este:
∑k , l ∈W
wkl⋅=0
∑k , l ∈W
wkl=0
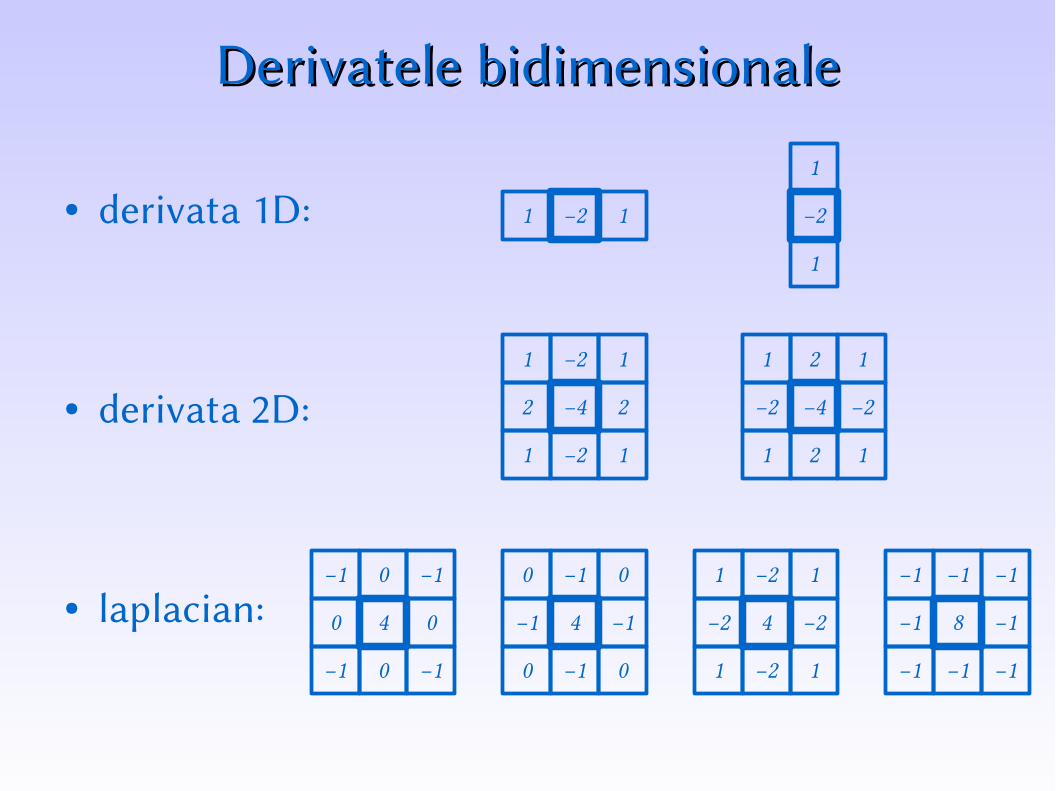
Derivatele bidimensionaleDerivatele bidimensionale
● derivata 1D:
● derivata 2D:
● laplacian:-1 0 -1
0 4 0
-1 0 -1
1 -2 1
2 -4 2
1 -2 1
1
-2
1
2
-4
2
1
-2
1
1 -2 1
1
-2
1
0 -1 0
-1 4 -1
0 -1 0
1 -2 1
-2 4 -2
1 -2 1
-1 -1 -1
-1 8 -1
-1 -1 -1

Contururi dintr-o imagineContururi dintr-o imagine
Filtre de ascuțireFiltre de ascuțire
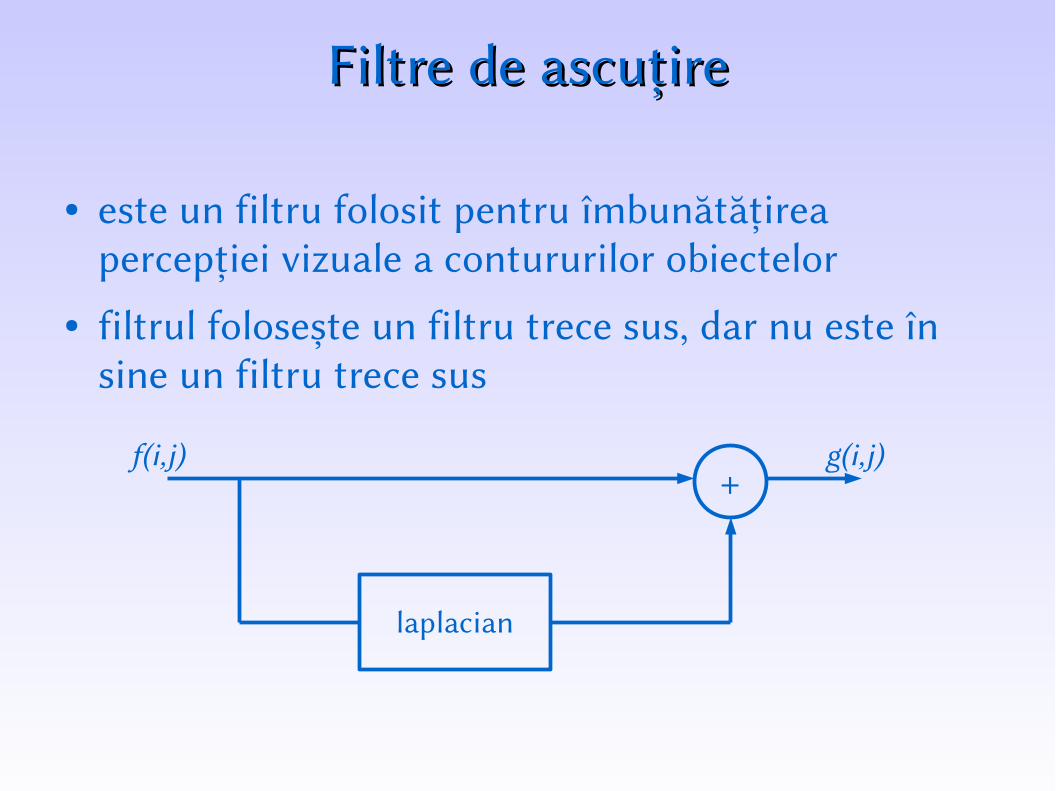
● este un filtru folosit pentru îmbunătățirea percepției vizuale a contururilor obiectelor
● filtrul folosește un filtru trece sus, dar nu este în sine un filtru trece sus
laplacian
+f(i,j) g(i,j)
–
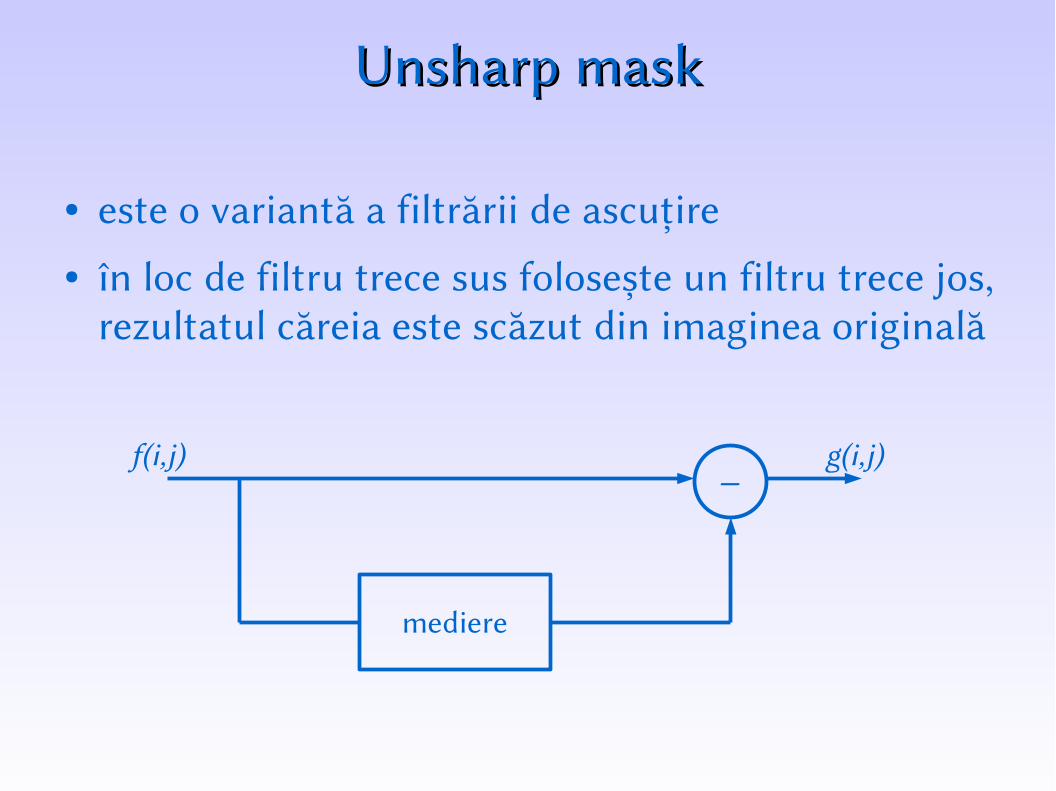
Unsharp maskUnsharp mask
● este o variantă a filtrării de ascuțire● în loc de filtru trece sus folosește un filtru trece jos,
rezultatul căreia este scăzut din imaginea originală
mediere
f(i,j) g(i,j)
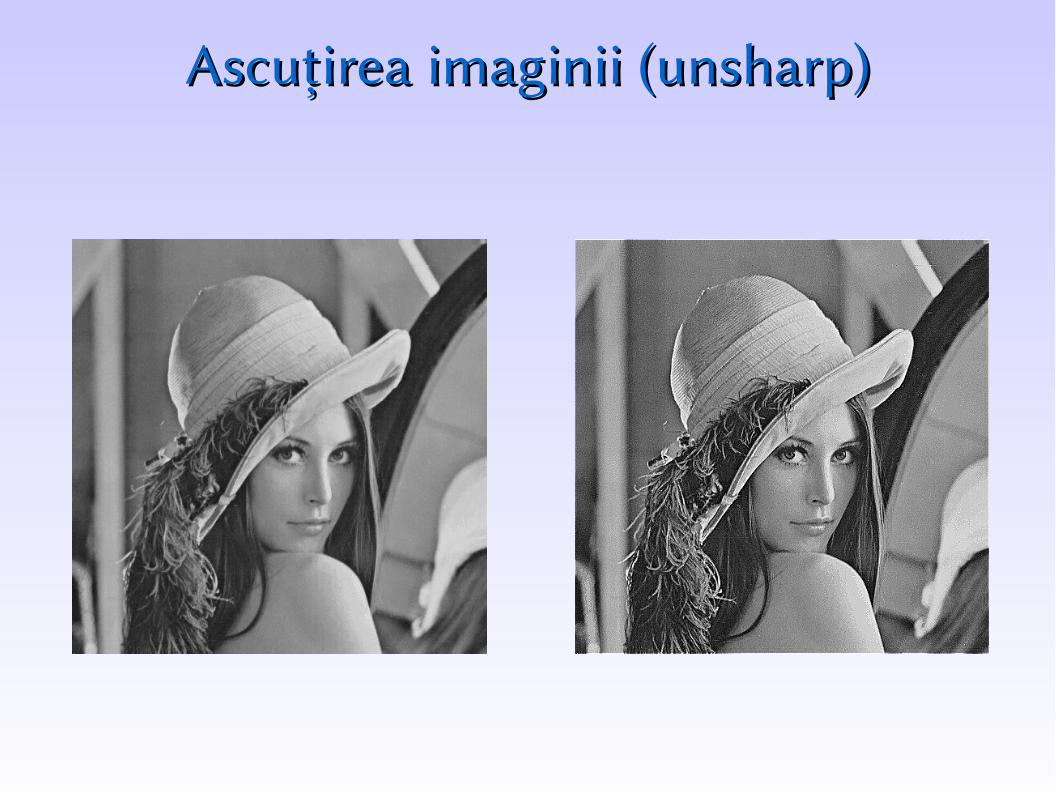
Ascuțirea imaginii (unsharp)Ascuțirea imaginii (unsharp)
Filtrarea neliniară a imaginilorFiltrarea neliniară a imaginilor
● filtrele neliniare nu respectă principiul liniarității sau a superpoziției
● sunt tot operatori de vecinătate, sunt definiți de o fereastră care selectează pixeli vecini pixelului asupra căreia se lucrează
● pixeli din vecinătate sunt ordonați într-un șir crescător după luminozitate, iar filtrul va lucra cu acest șir crescător
● deoarece ordinea în șirul crescător depinde de valorile pixelilor operația nu este liniară
Filtre de ordineFiltre de ordine
● fie pixeli vecini pixelului curent:
● aceste valori sunt ordonate crescător:
● ieșirea filtrului de ordine de ordin k este statistica de ordinul k, adică elementul de pe poziția k din șirul ordonat:
{x1, x2, , xn}
{x1 , x2 , , xn}, unde x1≤x2≤≤xn
rank k {x1, x2, , xn}=xk
Filtrul medianFiltrul median
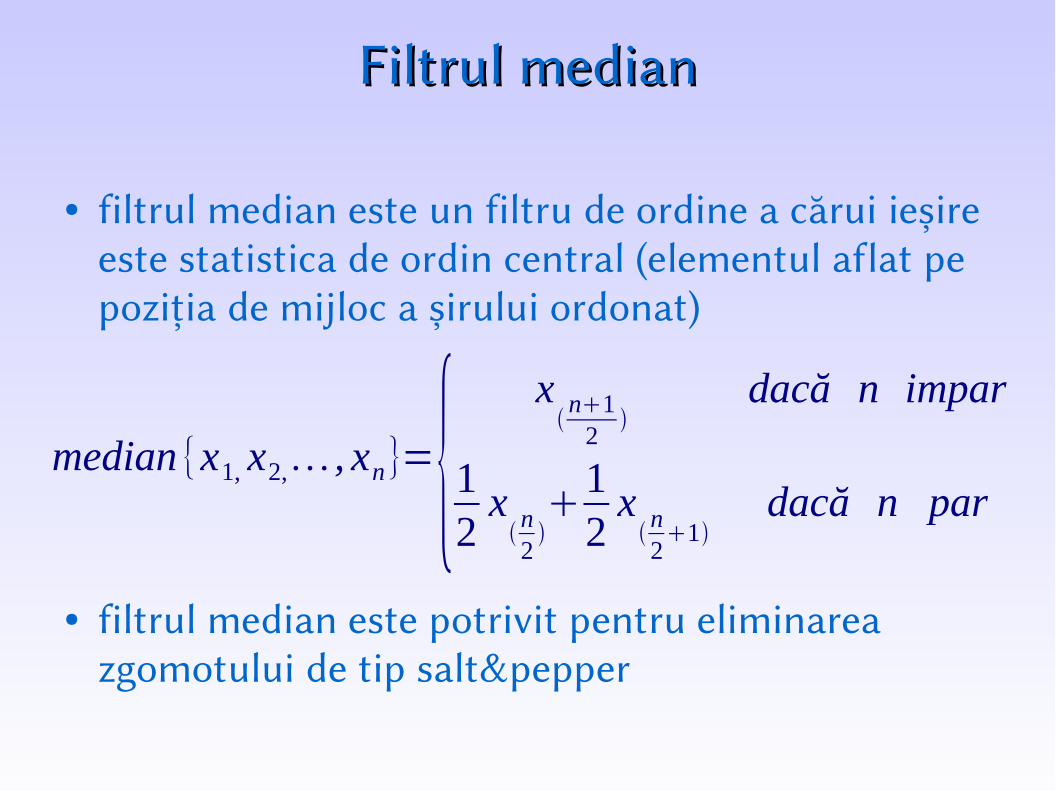
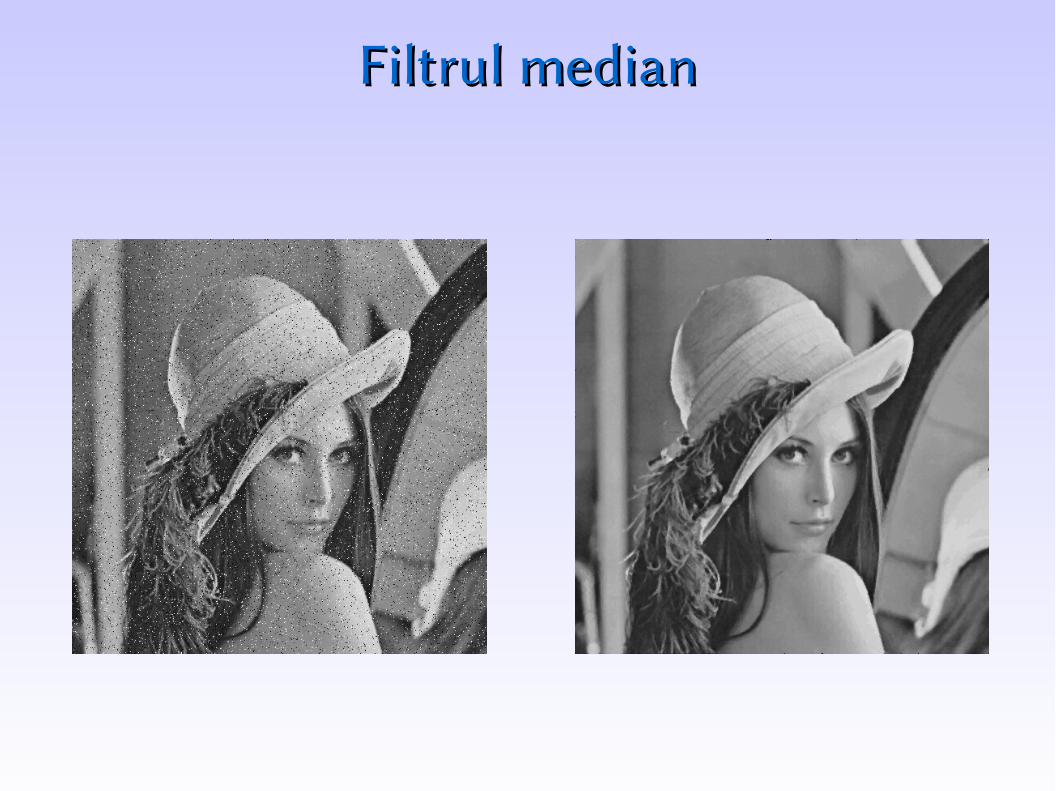
● filtrul median este un filtru de ordine a cărui ieșire este statistica de ordin central (elementul aflat pe poziția de mijloc a șirului ordonat)
● filtrul median este potrivit pentru eliminarea zgomotului de tip salt&pepper
median {x1, x2, , xn}={x
n1
2
dacă n impar
12
xn2
12
xn21
dacă n par
Filtrul medianFiltrul median
Filtrele min și maxFiltrele min și max
● sunt filtre de ordine de rangul 1 respectiv n● selectează culorile spre negru respectiv spre alb de
aceea nu sunt folosite în practică● în practică se folosesc anumite combinații ale
acestor filtre● filtre L: combinație liniară de filtre de ordine
f {x1, x2,, xn}=∑i=1
n
i⋅xi


















