pag 68-102
35
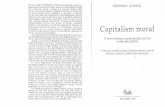
B.II.2. PROIECŢIA ORTOGONALĂ A DREPTEI 68 B.II.2.1 REPREZENTAREA DREPTEI DEFINIŢIE: Dreapta este un element liniar determinat de: • două puncte sau • un punct şi o direcţie. DREAPTA DETERMINATĂ DE DOUĂ PUNCTE Fie M ≠ N; M şi N = puncte oarecare M + N = D [ H] n [V] [W] N n' n'' [ H] m' [V] [W] M m'' m x x z z o o y y Fig.II.2.1 Fig.II.2.2
Transcript of pag 68-102

B.II.2. PROIECŢIA ORTOGONALĂ A DREPTEI
68
B.II.2.1 REPREZENTAREA DREPTEI DEFINIŢIE: Dreapta este un element liniar determinat de:
• două puncte sau • un punct şi o direcţie.
DREAPTA DETERMINATĂ DE DOUĂ PUNCTE Fie M ≠ N; M şi N = puncte oarecare M + N = D
[H]
n
[V] [W]
N
n'n''
[H]
m'
[V] [W]
Mm''
mx x
zz
o o
y y
Fig.II.2.1 Fig.II.2.2

B.II.2. PROIECŢIA ORTOGONALĂ A DREPTEI
69
d'
[H]
D
d
n
m'
d''[V] [W]
M
N
n'
m''
n''
m
z
x
o
y
Fig.II.2.3 (Fig.II.2.1 + Fig.II.2.2)
d
d' d''
m'
n'
m''
n''
n
m d
d'
m'
n'
n
m
z z
y
y
y
x xo o
Fig.II.2.4a Triplă proiecţie ortogonală Fig.II.2.4b Dublă proiecţie ortogonală
OBSERVAŢIE : Dacă M + N = D ⇒ M ∈ D şi N ∈ D
⇓
m ∈ d n ∈ d
m’ ∈ 'd n’ ∈ 'd
m’’∈ ''d n’’∈ ''d (vezi „A IV Invarianţii proiecţiilor - Apartenenţa” )

B.II.2. PROIECŢIA ORTOGONALĂ A DREPTEI
70
Fie H ≠ V; H + V = D unde H ∈ [H] V ∈ [V] (vezi II.1 Puncte particulare).
[H]
[V] [W]
V=
[H]
[V] [W]
H=
z z
xx
o o
v
v'
v''
h
h'
h''
y y
Fig.II.2.5 Fig.II.2.6
d'
[H]
D
d
d''
[V] [W]
H=
h'
v''
h''v
V=
h
v'
x
o
y
Fig.II.2.7 (Fig.II.2.5 + Fig.II.2.6)
d'
h'
v' v''
h''v
h
d''
d
d'
h'
v'
v
h
d
z z
y y
o ox xy
Fig.II.2.8a Triplă proiecţie ortogonală Fig.II.2.8b Dublă proiecţie ortogonală OBSERVAŢIE : Dacă H + V = D ⇒ H ∈ D şi V ∈ D
⇓
h ∈ d v ∈ d
h’ ∈ 'd v’ ∈ 'd
h’’∈ ''d v’’∈ ''d (vezi „A IV Invarianţii proiecţiilor - Apartenenţa” )

B.II.2. PROIECŢIA ORTOGONALĂ A DREPTEI
71
Fie H ≠ W; H + W = D unde H ∈ [H] W ∈ [W] (vezi II.1 Puncte particulare).
[H]
[V] [W]W=
[H]
[V] [W]
H=
z z
x xy
oo
w
w''
w'
h''
h
h'
Fig.II.2.9 Fig.II.2.10
d'
[H]
D
d
d''
[V] [W]
H=
h'
w'
w
h''
W=
h
w''
x
o
y
Fig.II.2.11(Fig.II.2.9 + Fig.II.2.10)
d''
w''
h
w'
h' h''
w
d'
d
h
w'
h'
w
d'
d
z z
x xy
y y
o o
Fig.II.2.12a Triplă proiecţie ortogonală Fig.II.2.12bDublă proiecţie ortogonală OBSERVAŢIE : Dacă H + W = D ⇒ H ∈ D şi W ∈ D
⇓
h ∈ d w ∈ d
h’ ∈ 'd w’ ∈ 'd
h’’∈ ''d w’’∈ ''d (vezi capitolul „A IV Invarianţii proiecţiilor - Apartenenţa” )

B.II.2. PROIECŢIA ORTOGONALĂ A DREPTEI
72
Fie V ≠ W; V + W = D unde V ∈ [V] W ∈ [W] (vezi II.1 Puncte particulare).
x
[H]
o
z
y
[V] [W]
W=w''
w
w'
x
[H]
o
z
y
[V] [W]
v
v''
v'V=
Fig.II.2.13 Fig.II.2.14
x
d'
[H]
D
o
y
d''[V] [W]
d
W=w''
V=v'
w
v
v''
w'
Fig.II.2.15 (Fig.II.2.13 + Fig.II.2.14)
v''
d''d'
d
v'
v
w''w'
w
d'
d
v'
v
w'
w
z z
x xy
yy
o o
Fig.II.2.16a Triplă proiecţie ortogonală Fig.II.2.16b Dublă proiecţie ortogonală OBSERVAŢIE : Dacă V + W = D ⇒ V ∈ D şi W ∈ D
⇓
v ∈ d w ∈ d
v’ ∈ 'd w’ ∈ 'd
v’’∈ ''d w’’∈ ''d (vezi capitolul „A IV Invarianţii proiecţiilor - Apartenenţa” )

B.II.2. PROIECŢIA ORTOGONALĂ A DREPTEI
73
DREAPTA DETERMINATĂ DE UN PUNCT ŞI O DIRECŢIE
• D ⊃ M ⇒ m ∈ d , m’ ∈ 'd , m’’∈ ''d (vezi „A IV Invarianţii proiecţiilor - apartenenţa” )
• şi D || E (vezi II.2.5 Poziţia relativă a două drepte)
sau D || [P] unde [P] = [H] sau [V] sau [W] (vezi II.2.4 Drepte particulare)
sau unde [P] = oarecare (vezi Poziţia dintre dreaptă şi plan – volumul II). B.II.2.2 URMELE DREPTEI DEFINIŢIE: Numim „urmele dreptei” punctele de intersecţie ale dreptei cu planele de proiecţie.
D ∩∩∩∩ [H] = H D ∩∩∩∩ [V] = V
D ∩∩∩∩ [W] = W ⇓
[H]
[V] [W]
H=[H]
[V] [W]
[H]
[V] [W]
V=
W=
x x x
o o o
zzz
y y y
v''
v'
h''
h
h' w
w''
v
w'
H ∈ [H] V ∈ [V] W ∈ [W] Fig.II.2.17
(vezi II.1 Puncte particulare). OBSERVAŢIE: Coordonatele punctelor H, V şi W din figura de mai sus au valori pozitive.

B.II.2. PROIECŢIA ORTOGONALĂ A DREPTEI
74
URMA ORIZONTALĂ A DREPTEI D D ∩ [H] = H
d'
[H]
D
d
d''
[V] [W]
H=
h'
h''
h
z
o
x y
Fig.II.2.18
h ∈ d
Dacă H ∈ D ⇒⇒⇒⇒ h’ ∈ 'd
h’’∈ ''d (vezi „A IV Invarianţii proiecţiilor - apartenenţa” ) ⇓
H ∈ D ; h ∈ d şi H ≡ h (vezi Fig.II.2.17) ⇓
h ≡≡≡≡ H = D ∩∩∩∩ d h’ ∈ OX (vezi Fig.II.2.17) h’’ ∈ OY (vezi Fig.II.2.17)
h’ ∈ 'd h’’ ∈ ''d (vezi „A IV Invarianţii proiecţiilor - apartenenţa” ) ⇓ ⇓
h’ = 'd ∩∩∩∩ OX h’’ = ''d ∩∩∩∩ OY şi h ∈ d (vezi „A IV Invarianţii proiecţiilor - apartenenţa” )
d'
h' h''
h
d''
d
d'
h'
h
d
z z
y
y y
xx o o
Fig.II.2.19a Triplă proiecţie ortogonală Fig.II.2.19b Dublă proiecţie ortogonală

B.II.2. PROIECŢIA ORTOGONALĂ A DREPTEI
75
URMA VERTICALĂ A DREPTEI D D ∩ [V] = V
d'
[H]
D
d
d''
[V] [W]
v''
v
V=v'
z
o
x y
Fig.II.2.20
v ∈ d
Dacă V ∈ D ⇒⇒⇒⇒ v’ ∈ 'd
v’’∈ ''d (vezi „A IV Invarianţii proiecţiilor - apartenenţa” ) ⇓
V ∈ D ; v’ ∈ 'd şi V ≡ v’ (vezi Fig.II.2.17) ⇓
v’ ≡≡≡≡ V = D ∩∩∩∩ 'd v ∈ OX v’’ ∈ OZ (vezi Fig.II.2.17)
v ∈ d v’’ ∈ ''d (vezi „A IV Invarianţii proiecţiilor - apartenenţa” ) ⇓ ⇓
v = d ∩∩∩∩ OX v’’ = ''d ∩∩∩∩ OZ
şi v’ ∈ 'd (vezi „A IV Invarianţii proiecţiilor - apartenenţa” )
d'
v' v''
v
d''
d
d'
v'
vd
z z
o oy
y y
xx
Fig.II.2.21a Triplă proiecţie ortogonală Fig.II.2.21b Dublă proiecţie ortogonală

B.II.2. PROIECŢIA ORTOGONALĂ A DREPTEI
76
URMA LATERALĂ A DREPTEI D D ∩ [W] = W
d'
[H]D
d
d''
[V]
[W]
w
W=w''
w'
o
+y
x
+z
-y
Fig.II.2.22
w ∈ d
Dacă W ∈ D ⇒⇒⇒⇒ w’ ∈ 'd
w’’∈ ''d (vezi „A IV Invarianţii proiecţiilor - apartenenţa” ) ⇓
W ∈ D ; w’’∈ ''d şi W ≡ w’’ (vezi Fig.II.2.17) ⇓
w’’ ≡≡≡≡ W = D ∩∩∩∩ ''d w ∈ OY w’ ∈ OZ (vezi Fig.II.2.17)
w ∈ d w’ ∈ 'd (vezi „A IV Invarianţii proiecţiilor - apartenenţa” ) ⇓ ⇓
w = d ∩∩∩∩ OY w’ = 'd ∩∩∩∩ OZ
şi w’’ ∈ ''d (vezi „A IV Invarianţii proiecţiilor - apartenenţa” )
d' d''
d
w'' w'
wd'
d
w
w'z z
o oxx y
y y Fig.II.2.23a Triplă proiecţie ortogonală Fig.II.2.23b Dublă proiecţie ortogonală

B.II.2. PROIECŢIA ORTOGONALĂ A DREPTEI
77
d'
[H]D
d
d''
[V]
[W]
H=
h'
v''
h''v
V=
h
v'
w
W=w''
w'
+y
x
o
-y
z
Fig.II.2.24
d'
h'
v' v''
h''
h
d''
d
w'' w'
wd'
h'
v'
v
h
d
w
v
w'z z
y y
xx o oy
Fig.II.2.25a Triplă proiecţie ortogonală Fig.II.2.25b Dublă proiecţie ortogonală

B.II.2. PROIECŢIA ORTOGONALĂ A DREPTEI
78
3[W ] I[V ]
[H ]P
[W ]4
A[H ]
2[W ]T2
S[V ]1T
[W ]1
D
V
T3 4T
H
W
+z
-z
+y-y ox
Fig.II.2.26 Vedere în lungul axei OX
OBSERVAŢII: 1. Lungimea unei drepte este infinită.
Dacă vom considera şi spaţiul de dincolo de planul lateral de proiecţie [W], adică –OX, afirmaţia de mai sus este valabilă. Dacă vom considera numai +OX, atunci [W] limitează toate dreptele D [W]. Dreptele devin semidrepte, limitate de punctul W = D ∩ [W].
2. O dreaptă D intersectează un plan într-un singur punct. ⇒ ∃ H (unic), H = D ∩ [H], ∃ V (unic), V = D ∩ [V], ∃ W (unic), W = D ∩ [W]. şi H = ∞ dacă D [H], V = ∞ dacă D [V], W = ∞ dacă D [W].

B.II.2. PROIECŢIA ORTOGONALĂ A DREPTEI
79
B.II.2.3 STUDIUL DREPTEI DEFINŢIE : Studiul dreptei se referă la analiza traseului dreptei, cu precizarea triedrelor şi octanţilor prin care trece dreapta. II.2.3.1 STABILIREA URMELOR DREPTEI Pentru precizarea triedrelor prin care trece dreapta se vor afla mai întâi urma orizontală (H) şi verticală (V) ale dreptei D .
d'
[H]
D
d
d''
[V] [W]
H=
h'
v''
h''v
V=
h
v'
z
x
o
y
Fig.II.2.27
d'
h'
v' v''
h''v
h
d''
d
d'
h'
v'
v
h
d
z z
y
y y
xx o o
Fig.II.2.28a Triplă proiecţie ortogonală Fig.II.2.28b Dublă proiecţie ortogonală
Dacă d , 'd , ''d sunt deja determinate (trasate), atunci: h’ = 'd ∩∩∩∩ OX şi v = d ∩∩∩∩ OX h’’ = ''d ∩∩∩∩ OY v’’= ''d ∩∩∩∩ OZ (vezi II.2.2 Urmele Dreptei)

B.II.2. PROIECŢIA ORTOGONALĂ A DREPTEI
80
II.2.3.2 ANALIZA TRIEDRELR PARCURSE DE D
3[W ] I[V ]
[H ]P
[W ]4
A[H ]
2[W ]T2
S[V ]1T
[W ]1
D
V
T3 4T
H
+z
-z
+y-y ox
Fig.II.2.29 Vedere în lungul axei OX
OBSERVAŢII: 1. H ∈ [H]. Dacă H ∈ D , atunci H este punctul unde D trece dintr-un triedru în
altul, vecin. 2. V ∈ [V]. Dacă V ∈ D , atunci V este punctul unde D trece dintr-un triedru în altul,
vecin. 3. Din observaţiile 1 şi 2 ⇒ H şi V delimitează triedrele parcurse de D . 4. Din observaţiile 1 şi 2 ⇒ între H şi V, D trece printr-un singur diedru. 5. Din observaţiile 1 şi 2 ⇒ dincolo de H şi V, D intră în triedrele alăturate celui
dintre H şi V. 6. Nu este necesar să se afle W = D ∩ [W] pentru că W nu ajută la stablirea
triedrelor parcurse de D . Concluzii: 1. O dreaptă D ( D [V] şi D [H]) trece prin TREI TRIEDRE ALĂTURATE
(vecine). 2. Dacă D ar trece prin toate cele patru triedre, D ar trebui să intersecteze de două
ori [V] (şi o singură dată [H]) sau de două ori [H] (şi o singură dată [V]), ceea ce este imposibil (vezi obs. Nr.2 „urmele dreptei”).

B.II.2. PROIECŢIA ORTOGONALĂ A DREPTEI
81
II.2.3.2a ANALIZA TRIEDRELOR PARCURSE DE D ÎN TRIPLĂ PROIECŢIE
-z
3[W ] I[V ]
[H ]P-y ox
[W ]4
A[H ] +y
+z
2[W ]T2
S[V ]1T
[W ]1
D=
T3 4T
H=
V=
h=h''
v'=v''
d''d'
h'=v d
Fig.II.2.30 Vedere în lungul axei OX
OBSERVAŢII: 1. În aşezarea axelor de mai sus, unele proiecţii sunt confundate, deşi sunt distincte
în realitate (v’ = v’’, h = v, h = h’’). 2. Analog ''d ≡ D (disticte în realitate, vezi fig.II.2.24). 3. Dacă, analizând proiecţia laterală a unui punct (m’’) putem preciza triedrul în
care se găseşte punctul M (vezi proiecţiile punctului), analog, analizând traseul
proiecţiei laterale ''d a unei drepte D , putem preciza triedrele prin care trece
dreapta D . Concluzie: În triplă proiecţie stabilirea triedrelor prin care trece D se face urmărind traseul proiecţiei laterale ''d . Triedrele se vor marca pe o linie paralelă cu ''d , fiind delimitate de linii perpendiculare pe aceasta, din proiecţiile laterale ale urmelor (h’’ şi v’’).

B.II.2. PROIECŢIA ORTOGONALĂ A DREPTEI
82
d'
[H]
D
d
d''
[V] [W]
H=
h'
v''
h''v
V=
h
v'
T2
1T
4T
z
x
o
y
Fig.II.2.31
d'
h'
v'v''
h''v
h
d''
d
4T
1T
2
z
o
y
yx
Fig.II.2.32

B.II.2. PROIECŢIA ORTOGONALĂ A DREPTEI
83
II.2.3.2b ANALIZA TRIEDRELOR PARCURSE DE D ÎN DUBLĂ PROIECŢIE OBSERVAŢII: 1. Numai utilizând ''d , putem preciza direct traseul dreptei D în triplă proiecţie. 2. În cazul dublei proiecţii, unde avem la dispoziţie d şi 'd se pot stabili doar
limitele triedrelor şi anume, urma orizontală H şi verticală V. 3. Pentru a afla în ce triedru se află D în intervalul (H…V) se studiază semnul + sau
– al coordonatelor b şi c ale unui punct oarecare de pe dreaptă, din acest interval. Triedrele se vor marca pe o linie paralelă la OX, fiind delimitate de linii perpendiculare pe aceasta, din proiecţiile punctelor H şi V.
d'
h'
h
p
m
m'
v'p'
n
v
b >
0N
c <
0N
c >
0M
b >
0M
c >
0P
b <
0P
1T 2T4T
d
n'
z
o
y
x
Fig.II.2.33
• Fie M ∈ D , M între H şi V.
Dacă ∀M ∈ D , M ∈ (H…V), cM > 0 şi bM > 0 ⇒ intervalul (H…V) este T1. • Fie N ∈ D , N lateral faţă de H.
Dacă ∀N ∈ D , N ∈ (∞…H), cN < 0 şi bN > 0 ⇒ intervalul (∞…H) este T4. • Fie P ∈ D , P lateral faţă de V.
Dacă ∀P ∈ D , P ∈ (V…∞), cP > 0 şi bP < 0 ⇒ intervalul (V…∞) este T2. OBSERVAŢIE: Este suficient să se stabilească în modul de mai sus numai două din cele trei triedre prin care trece dreapta, anume triedrul dintre H şi V, şi unul dintre cele laterale, avându-se în vedere ca triedrele sunt vecine.

B.II.2. PROIECŢIA ORTOGONALĂ A DREPTEI
84
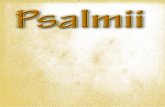
II.2.3.3 STABILIREA PUNCTELOR DE INTERSECŢIE CU PLANELE BISECTOARE II.2.3.3.a B1
• Fie B1 ∈ [B1]. Pentru (∀)B1, b = c, b şi c au simultan acelaşi semn.
3[W ] I[V ]
[H ]P
[W ]4
A[H ]
2[W ]T2
S[V ]1T
[W ]1
T3 4T
B , b ''1 1
B , b ''1 1
+b
+b-b
-b+
c
+c
-c-c[B
],B
11W
[B ],
B1
1W
45°
ox, o+y-y
Fig.II.2.34a
Fig.II.2.34b
[H]
[V]
[W]
[H]
bise
ctoa
rea
ungh
iulu
i -Y
O-Z
bise
ctoa
rea
ungh
iulu
i +ZO
+Y
b''1
b''1
-b
-c
-b = -c
+b
+c
+b = +c
+z
-z
+y
-yx
o
+b se măsoară pe +OY, +c se măsoară pe +OZ ⇒ b1’’ se va găsi pe bisectoarea unghiului +ZO+Y
-b se măsoară pe -OY, -c se măsoară pe -OZ ⇒ b1’’ se va găsi pe bisectoarea unghiului -ZO-Y
Dacă B1 ∈ D ⇒ b1’’ ∈ ''d (vezi „A IV Invarianţii proiecţiilor - apartenenţa” )
⇒ b1’’ ∈ bisectoarea unghiului ZOY, -ZO-Y. b1’’ ∈ ''d ⇓ b1’’ = ''d ∩ bisectoarea unghiului ZOY, -ZO-Y.

B.II.2. PROIECŢIA ORTOGONALĂ A DREPTEI
85
[H]
[V]
[W]
[H]
bise
ctoa
rea
ungh
iulu
i -Y
O-Z
bise
ctoa
rea
ungh
iulu
i +ZO
+Y
b''1
b''1
-b
-c
-b = -c
+b
+c
d''
d''
1
2
+b = +c
+z
-z
x
+y
-y
o
Fig.II.2.35
O
+z(-y)
+y(-z)
d''
o
+z(-y)
+y(-z)
d''
1
2sau
bise
ctoar
ea
ungh
iulu
i -YO-Z
bisec
toarea
ungh
iului
+ZO+Y
1b''
1b''
x(-y) x(-y)+y +y
Fig.II.2.36
OBSERVAŢIE: În tripla proiecţie unghiul ZOY = 900, bisectoarea unghiului este o direcţie înclinată la 450 faţă de OY (axa orizontală) şi OZ (axa verticală). (planul lateral în triplă proiecţie este determinat de axele OY orizontală şi OZ verticală)

B.II.2. PROIECŢIA ORTOGONALĂ A DREPTEI
86
DETERMINAREA PROIECŢIILOR PUNCTULUI B1 • +b = +c
[H]
[V][W]
d'D
d
B
d''
b' b''
b
11
1
1
bisecto
area
unghiului +ZO+Y
+z
o
x
Fig.II.2.37
OBSERVAŢIE: - prima proiecţie determinată este b1’’ (vezi pag. 85); - B1 = D ∩ paralela la OX din b1’’; - b1’ = 'd ∩ paralela la OY din B1; - b1 = d ∩ paralela la OZ din B1.
d' d''
d
b''1b'1
b1
+c
+b
bisec
toare
a
ungh
iului
+ZO+Y
+z(-y)
+y(-z)
yxo
Fig.II.2.38 Triplă proiecţie
OBSERVAŢIE:
- prima proiecţie determinată este b1’’ (vezi pag.85); - b1’ = 'd ∩ paralela la OX din b1’’; - b1 ∈ d .

B.II.2. PROIECŢIA ORTOGONALĂ A DREPTEI
87
• -b = -c
[H]
[V]
[W]
d'
D
d
B
d''
b'b''
b
1
1
1
1
bise
ctoa
rea
ungh
iulu
i -Y
O-Z
[W]
[W]
[H]
[V]
+z
-z
x
+y
-y
o
Fig.II.2.39
OBSERVAŢIE: - prima proiecţie determinată este b1’’ (vezi pag.85); - B1 = D ∩ paralela la OX din b1’’; - b1’ = 'd ∩ paralela la OY din B1; - b1 = d ∩ paralela la OZ din B1.
d''b''1
-b-c
d'
d
b'1
b1z(-y)
y(-z)
yo
x(-y)
Fig.II.2.40 Triplă proiecţie
OBSERVAŢIE:
- prima proiecţie determinată este b1’’ (vezi pag.85); - b1’ = 'd ∩ paralela la OX din b1’’; - b1 ∈ d .

B.II.2. PROIECŢIA ORTOGONALĂ A DREPTEI
88
DETERMINAREA PROIECŢIILOR PUNCTULUI B1 ÎN DUBLĂ PROIECŢIE Pentru determinarea proiecţiilor punctului B1 în dublă proiecţie ortogonală se trasează simetrica uneia dintre proiecţiile dreptei faţă de OX. Fie 'd proiecţia a cărei simetrică se va trasa.
d'
h'
v'
vsim
etrica proiecþiei d'
faþã de OX
b'1
b1
+c
+b
=
=
+b = +cb > 0, c > 0
z
y
ox
Fig.II.2.41
x o
+z(-y)
+y(-z)
d'
h' v
v'
simetr
ica p
roiec
þiei d
'
faþã
de O
X
b1
b'1
=
=
-b = -cb < 0, c < 0
-c-b
Fig.II.2.42

B.II.2. PROIECŢIA ORTOGONALĂ A DREPTEI
89
sau Fie d proiecţia a cărei simetrică se va trasa.
d
h' v
simetrica proiecþiei d
faþã de OX
b'1
b1
+c
+b
=
=
+b = +cb > 0, c > 0
h
+z
ox
Fig.II.2.43
-b = -cb < 0, c < 0
d
h' v
simetr
ica pr
oiec
þiei d
faþã
de O
X
b1
b'1
-b-c
h
ox
Fig.II.2.44

B.II.2. PROIECŢIA ORTOGONALĂ A DREPTEI
90
Pentru ∀B1, cu b1’ ∈ 'd şi b1 ∈ liniei simetrice a proiecţiei 'd faţă de OX, sau b1 ∈ d şi b1’
∈ liniei simetrice a proiecţiei d faţă de OX, b = c; b şi c au simultan acelaşi semn (vezi Fig.II.2.38 şi Fig.II.2.40).
Dacă B1 ∈ D ⇒ b1 ∈ d (vezi „A IV Invarianţii proiecţiilor - Apartenenţa” ) Dacă B1 ∈ [B1] ⇒ b1’ ∈ 'd şi b1 ∈ liniei simetrice a proiecţiei 'd faţă de OX (vezi pag.88) ⇓ b1 = d ∩∩∩∩ simetrica proiecţiei 'd faţă de OX
d'h'
v'
v
h
d
simetrica proiecþiei d'
faþã de OX
b'1
b1
+c
+b
=
=
+b = +cb > 0, c > 0
z
y
ox
Fig.II.2.45
x o
+z(-y)
+y(-z)
d'
h' v
v'
simetr
ica p
roiec
þiei d
'
faþã
de O
X
b1
b'1
=
=
-b = -cb < 0, c < 0
hd
-c-b
Fig.II.2.46

B.II.2. PROIECŢIA ORTOGONALĂ A DREPTEI
91
Dacă B1 ∈ D ⇒ b1’ ∈ 'd (vezi „A IV Invarianţii proiecţiilor - apartenenţa” ) Dacă B1 ∈ [B1] ⇒ b1 ∈ d şi b1’ ∈ liniei simetrice a proiecţiei d faţă de OX (vezi pag.89) ⇓ b1’ = 'd ∩∩∩∩ simetrica proiecţiei d faţă de OX
d
v
simetrica proiecþiei d'
faþã de OX
b'1
b1
+c
+b
=
=
+b = +cb > 0, c > 0
h
v
h'd'
+z
+y
ox
Fig.II.2.47
-b = -cb < 0, c < 0
d
v
simet
rica p
roiec
þiei d
'
faþã
de O
X
b1
b'1
-b-c
h
v'd'
h'
+z
+y
ox
Fig.II.2.48
OBSERVAŢIE: Nu este necesar să se traseze două linii simetrice faţă de OX, una simetrica proiecţiei d iar cealaltă simetrica proiecţiei 'd , deoarece se obţine acelaşi rezultat în ambele cazuri (proiecţiile punctului B1 sunt unice pentru o dreaptă D dată). În concluzie se va
trasa fie simetrica lui d faţă de OX, fie a lui 'd faţă de OX.

B.II.2. PROIECŢIA ORTOGONALĂ A DREPTEI
92
II.3.3.b B2 • Fie B2 ∈ [B2]. Pentru ∀B2, b = c, b şi c au semne diferite.
3[W ] I[V ]
[H ]P
[W ]4
A[H ]
2[W ]T2
S[V ]1T
[W ]1
T3 4T
B , b ''2 2
B , b ''2 2
-b
-b
+c
+c
-c
[B ],B2
+b
+b
-c
2W
45°
ox, o+y-y
Fig.II.2.49a
Fig.II.2.49b
x
[H]
+z
+y
[V]
[W]
o
-y
[H]
-z
bisectoareaunghiului -yoz
b''2
b''2
-b
+b
+c
=
=
=
=
-c
bisectoareaunghiului yo-z
-b = +c
+b = -c
-b se măsoară pe -OY, +c se măsoară pe +OZ ⇒ b2’’ se va găsi pe bisectoarea unghiului +ZO-Y +b se măsoară pe +OY, -c se măsoară pe -OZ ⇒ b2’’ se va găsi pe bisectoarea unghiului –ZO+Y Dacă B2 ∈ D ⇒ b2’’ ∈ ''d (vezi „A IV Invarianţii proiecţiilor - apartenenţa” )
⇒ b2’’ ∈ bisectoarea unghiului +ZO-Y = -ZO+Y b2’’ ∈ ''d ⇓ b2’’ = ''d ∩ bisectoarea unghiului +ZO-Y = -ZO+Y

B.II.2. PROIECŢIA ORTOGONALĂ A DREPTEI
93
x
[H]
+z
+y
[V]
[W]
o
-y
[H]
-z
bisectoareaunghiului +zo-y
b''2
b''2
-b
+b
+c
=
=
=
=
-c
d''
d''
1
2
bisectoareaunghiului -zoy
-b = +c
+b = -c
Fig.II.2.50
d''
d''
1
2
sau
bisectoarea
unghiului -YO+Z
bisectoarea
unghiului -ZO+Y
2b''
2b''
+z(-y)
+y(-z)
yox(-y) x(-y) o
+z(-y)
y
+y(-z)
Fig.II.2.51 OBSERVAŢIE: În tripla proiecţie unghiul +ZO-Y = -ZO+Y = 900, bisectoarea unghiului este o direcţie înclinată la 450 faţă de OY (axa orizontală) şi OZ (axa verticală). (planul lateral în triplă proiecţie este determinat de axele OY orizontală şi OZ verticală)

B.II.2. PROIECŢIA ORTOGONALĂ A DREPTEI
94
DETERMINAREA PROIECŢIILOR PUNCTULUI B2 • -b = +c
[H]
[V][W]
d''
Dd
B
d'
b'2
2
2
bisectoarea
unghiului +ZO-Y
[W]
[H]
[V]
b''
b
2
+z
o
-z
+y
x-y
Fig.II.2.52
OBSERVAŢIE: - prima proiecţie determinată este b2’’ (vezi pag.93); - B2 = D ∩ paralela la OX din b2’’; - b2’ = 'd ∩ paralela la OY din B2; - b2 = d ∩ paralela la OZ din B2.
x(-y) o y
y(-z)
d''b''2b' =b 2
+c=
-b
2
dd'
bisectoarea
unghiului +zo-y
+z(-y)
Fig.II.2.53 Triplă proiecţie
OBSERVAŢIE:
- prima proiecţie determinată este b2’’ (vezi pag. 93); - b2’ = 'd ∩ paralela la OX din b2’’; - b2 ∈ d .

B.II.2. PROIECŢIA ORTOGONALĂ A DREPTEI
95
• +b = -c
[H]
[V]d'
D
d
B
d''
b''b'
b
2 2
2
bisectoarea
unghiului +YO
-Z[W]
[V]
[W]
[W]
[H]
2
+z
-z
o
+y
-y
x
Fig.II.2.54
OBSERVAŢIE: - prima proiecţie determinată este b2’’ (vezi pag. 93); - B2 = D ∩ paralela la OX din b2’’; - b2’ = 'd ∩ paralela la OY din B2; - b2 = d ∩ paralela la OZ din B2.
b' =b 2 2d
-c=
+bd'
b''2bisectoarea
d''x(-y)
z(-y)
y(-z)
o y
unghiului +yo-z
Fig.II.2.55 Triplă proiecţie
OBSERVAŢIE: - prima proiecţie determinată este b2’’ (vezi pag. 93); - b2’ = 'd ∩ paralela la OX din b2’’; - b2 ∈ d .

B.II.2. PROIECŢIA ORTOGONALĂ A DREPTEI
96
DETERMINAREA PROIECŢIILOR PUNCTULUI B2 ÎN DUBLĂ PROIECŢIE Pentru ∀B2 ∈ [B2] ⇒ b2 ≡ b2’ Dacă b2 ∈ d , b2’ ∈ 'd şi b2 ≡ b2’
⇓ b2 ≡≡≡≡ b2’ ≡≡≡≡ d ∩∩∩∩ 'd
-b = +c
b' =b 2
+c=
-b
2
dd'
z
o
y
x
Fig.II.2.56
+b = -c
b' =b 2
-c=
+b
2d d'
z
o
y
x
Fig.II.2.57

B.II.2. PROIECŢIA ORTOGONALĂ A DREPTEI
97
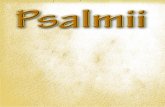
II.2.3.4 ANALIZA OCTANŢILOR PARCURŞI DE D Vederi în lungul axei OX
3[W ] I[V ]
[H ]P
[W ]4
A[H ]
2[W ]T2
S[V ]1T
[W ]1
D
T3 4T
H
B
B
V
1[B ]
2[B ]
2
1
O2
O1
O8
O7
O3
+z
-z
ox-y +y
Fig.II.2.58
3[W ] I[V ]
[H ]P
[W ]4
A[H ]
2[W ]T2
S[V ]1T
[W ]1
D
T3 4T
H
B
B
V
1[B ]
2[B
]2
1
O3
O4
O5
O6
O2
+z
-z
ox +y-y
Fig.II.2.59

B.II.2. PROIECŢIA ORTOGONALĂ A DREPTEI
98
OBSERVAŢII:
1. B1 ∈ [B1]. Dacă B1 ∈ D , atunci B1 este punctul unde D trece dintr-un octant în altul, vecin, ambii ai aceluiaşi triedru.
2. B2 ∈ [B2]. Dacă B2 ∈ D , atunci B2 este punctul unde D trece dintr-un octant în altul, vecin, ambii ai aceluiaşi triedru.
3. Din observaţiile 1 şi 2 ⇒ B1 şi B2 delimitează octanţii prin care trece D . 4. ⇒ între H şi B1 şi respectiv V şi B1 sau
între H şi B2 şi respectiv V şi B2, D parcurge un singur octant.
5. ⇒ între H şi V, D străbate doi octanţi ai aceluiaşi triedru.
6. ⇒ în triedrele în care D nu∩ [B1] şi respectiv D nu∩ [B2], D parcurge un singur octant.
Concluzii:
1. O dreaptă D ( D ∩ [V], D ∩ [H], D ∩ [B1], D ∩ [B2]) trece prin cinci octanţi vecini (alăturaţi).
2. O dreaptă intersectează un plan o singură dată
⇒ ∃B1 = unic, B1 = D ∩ [B1], B1 ∈ T1 sau B1 ∈ T3
∃B2 = unic, B2 = D ∩ [B2], B2 ∈ T2 sau B2 ∈ T4.
3. Dacă B1 = D ∩ [B1], B1 ∈ T1 ⇒ D parcurge O1 şi O2.
Dacă B1 = D ∩ [B1], B1 ∈ T3 ⇒ D parcurge O5 şi O6.
Dacă B2 = D ∩ [B2], B2 ∈ T4 ⇒ D parcurge O7 şi O8.
Dacă B2 = D ∩ [B2], B2 ∈ T2 ⇒ D parcurge O3 şi O4.

B.II.2. PROIECŢIA ORTOGONALĂ A DREPTEI
99
II.2.3.4.a ANALIZA OCTANŢILOR PARCURŞI DE D ŞI STABILIREA TRASEULUI DREPTEI D ÎN TRIPLĂ PROIECŢIE
H=
h'h''
v
V=
h
v'
[H]
[V]
[W]
d''
D
d
d'
1
bisecto
area
unghiului +ZO+Y
b''
b
1
Bb'11
B2
b'2
[V]
[W]
[W]
b''2
b2
[H]
1Tv''
bisectoarea
unghiului -ZO+Y
4T
2T
7O
8O
1O
2O
3O
+z
-z
+y
o
x
Fig.II.2.60
1. În triplă proiecţie stabilirea octanţilor prin care trece dreapta D se face urmărind
traseul proiecţiei laterale ''d (vezi Obs.2 pag.81). 2. Analog cu triedrele, octanţii se vor marca pe o linie paralelă cu ''d , delimitată
de linii perpendiculare pe aceasta, din proiecţiile laterale ale punctelor care delimitează octanţii (H, V, B1, B2).
3. Dacă triedrele parcurse de D au fost deja stabilite, este suficient să se determine un
singur octant, în funcţie de triedrul în care se află şi de triedrul vecin (ex.: O1, vezi Fig. de mai sus). Ceilalţi 4 octanţi se vor denumi în ordine, fiind vecini cu acesta.

B.II.2. PROIECŢIA ORTOGONALĂ A DREPTEI
100
d'
h'
v' v''
h''v
h
d
b''
b''
d''
b =b'
b'
b
1
1
2 2
1
2
1T
4T
2T
2O
1O
8O
7O
3O
bisec
toare
a
ungh
iului
+ZO+Y
bisectoarea
z
o
y
yx
Fig.II.2.61 Triplă proiecţie
II.2.3.4.b ANALIZA OCTANŢILOR PARCURŞI DE D ŞI STABILIREA TRASEULUI DREPTEI D ÎN DUBLĂ PROIECŢIE
d'
h'
v'
v
h
d
b =b'
b'
b
1
1
2 2
simetrica proiecþiei d'
faþã de OX
2O1O8O7O 3O
2T1T4T
z
o
y
x
Fig.II.2.62 Dublă proiecţie
• Pentru stabilirea proiecţiilor punctelor B1 şi B2 vezi pag. 88, 89, 90, 91 şi 96. • Pentru stabilirea octanţilor parcurşi de D vezi pag. 98, pct.3. • Octanţii se vor marca pe o linie paralelă la OX, delimitată de linii perpendiculare pe
aceasta, din proiecţiile punctelor care delimitează octanţii (H, V, B1, B2).

B.II.2. PROIECŢIA ORTOGONALĂ A DREPTEI
101
II.2.3.5 ETAPELE STABILIRII TRASEULUI UNEI DREPTE D . RECAPITULARE
Fie M ≠ N, M şi N = oarecare, M + N = D 1. Reprezentarea proiecţiilor punctelor
M şi N
n
n' n''
m
m' m''
y
yox
2. Reprezentarea proiecţiilor dreptei
D :
m + n = d
m’ + n’ = 'd
m’’+ n’’= ''d
d'
d
d''
n
n' n''
m
m' m''
o
y
yx
3. Determinarea urmelor H şi V ale
dreptei D .
d'
h'
v' v''
h''
h
d
d''
v
z
y
y
ox
4. Stabilirea triedrelor parcurse de
dreapta D .
d'
h'
v' v''
h''
h
d
d''1T
4T
2T
v
z
o
y
yx
5. Aflarea punctelor de intersecţie ale
dreptei D cu [B1] şi [B2].
d'
h'
v' v''
h''v
h
d
b''
b''
d''
b =b'
b'
b
1
1
2 2
1
2
z
o
y
yx
6. Stabilirea octanţilor prin care trece
dreapta D .
d'
h'
v' v''
h''v
h
d
b''
b''d''
b =b'
b'
b
1
1
2 2
1
2
1T
4T
2T
2O
1O
8O
7O
3O
bisec
toarea
ungh
iului
+ZO+Y
bisectoarea
unghiului -ZO+Y
z
o
y
yx

B.II.2. PROIECŢIA ORTOGONALĂ A DREPTEI
102