Olteanu I. Vlad Gabriel - Rezumat
35
UNIVERSITATEA TEHNICĂ DE CONSTRUCŢII BUCUREŞTI FACULTATEA DE GEODEZIE TEZĂ DE DOCTORAT (rezumat) Contribuţii la dezvoltarea sistemelor mobile de scanare terestră Coordonator ştiinţific: Prof. Univ. Dr. Ing. Constantin MOLDOVEANU Doctorand: Ing. Vlad Gabriel OLTEANU BUCUREŞTI, 2014
Transcript of Olteanu I. Vlad Gabriel - Rezumat

UNIVERSITATEA TEHNICĂ DE CONSTRUCŢII BUCUREŞTI FACULTATEA DE GEODEZIE
TEZĂ DE DOCTORAT (rezumat)
Contribuţii la dezvoltarea sistemelor mobile de scanare
terestră
Coordonator şt i inţ if ic:
Prof . Univ . Dr. Ing. Constant in MOLDOVEANU
Doctorand:
Ing . Vlad Gabrie l OLTEANU
BUCUREŞTI, 2014


Cuprins
1 Drd. ing.Vlad Gabriel OLTEANU
Cuprins
Capitolul I Introducere
Capitolul II Noţiuni generale
II.1 Scurt istoric al dezvoltării sistemelor de scanare II.2 Principii elementare ale sistemelor LiDAR II.3 Sisteme de coordonate carteziene utilizate în navigație II.4 Cinematica mişcării II.5 Metode de estimare secvențială a observațiilor. Filtrul Kalman
Capitolul III Stadiul actual la nivel național și internațional referitor la tematica abordată
III.1 Privire de ansamblu asupra dezvoltărilor din domeniu III.2 Sisteme terestre de scanare mobilă realizate la nivel internațional III.3 Situația la nivel național
Capitolul IV Senzori și sisteme de navigație utilizate în cadrul echipamentelor mobile de scanare terestră
IV.1 Sisteme de radionavigație prin satelit IV.2 Senzori inerțiali IV.3 Unități inerțiale de măsurare (IMU). Sisteme de navigație inerțiale (INS) IV.4 Sisteme de navigație complexe realizate prin cuplarea GNSS/INS IV.5 Realizarea sistemelor terestre mobile de scanare
Capitolul V Modele de prelucrare în estimarea formei
V.1 Noţiuni generale despre teoria estimării V.2 Estimatori V.3 Modelul de estimare Gauss-Markov V.4 Modelul de prelucrare Gauss-Helmert V.5 Metode de prelucrare robustă în cazul modelului Gauss-Markov V.6 Metode de prelucrare robustă în cazul prelucrărilor clasice V.7 Metode de prelucrare robustă în cazul modelului Gauss – Helmert V.8 Prelucrarea robustă a formei pentru nori de puncte obţinuţi cu ajutorul sistemelor
terestre de scanare

Cuprins
2 Drd. ing.Vlad Gabriel OLTEANU
Capitolul VI Studiu comparativ privind analiza formei pe baza scanărilor terestre mobile și statice
VI.1 Generalităţi VI.2 Implementarea în Matlab a estimatorilor pentru modelele prezentate VI.3 Studiu pe baza obiectelor simulate VI.4 Studiu pe baza măsurătorilor reale
Capitolul VII Concluzii și viitoare direcții de cercetare
VII.1 Concluzii VII.2 Contribuții personale VII.3 Direcții de cercetare propuse în legătură cu tematica abordată

Introducere
3 Drd. ing.Vlad Gabriel OLTEANU
Capitolul I Introducere
Prestigioasa companie de cercetare de piață în domenii industriale Markets and Markets estima într-un raport comprehensiv din octombrie 2013 (Markets and Markets, 2013) că piața sistemelor LiDAR, evaluată curent la aproximativ $220 milioane, va atinge în 2018 o cotă de peste $550 milioane, cu o rată de creștere anuală estimată ce se apropie de 16.5%. Momentan, contribuția principală a acestei piețe este reprezentată de sistemele LiDAR aeropurtate, încă extrem de scumpe. Geoff Zeiss, fost director al programului de utilitate industrială al Autodesk și actual președinte al unei companii de consultanță de renume (Between the Poles) afirma în februarie 2014 (Zeiss, 2014) că acest lucru urmează să se schimbe drastic în perioada imediat următoare, sistemele LiDAR terestre statice și mobile vor depăși cota de piață a celor aeropurtate până în 2018. Mai mult, raportul Markets and Markets prevede posibilitatea ca echipamentele LiDAR low cost să revoluționeze întreaga industrie geospațială.
Prezenta lucrare tratează posibilitățile de utilizare a sistemelor LiDAR terestre mobile în estimarea formelor plane sau pătratice pentru posibile aplicații industriale. Lucrarea continuă oarecum eforturile depuse în cadrul lucrării de licență realizate la Universitatea Leibniz din Hannovra – Geodatische Institut Hannover prin programul Erasmus (Olteanu, 2007). În respectiva lucrare erau tratate posibilitățile de estimare a formelor prin metode robuste. Lucrarea de față își propune să preia, dezvolte și implementeze algoritmii respectivi pentru o analiză robustă a formei în cazul scanărilor dinamice și statice cu scopul de a sublinia rezultatele bune ale acestora dar și alte avantaje aduse de tehnologiile cinematice.
Având în vedere tematica lucrării, în cazul comparării estimărilor obținute pe baza norilor de puncte extrași din scanări cinematice cu estimări similare obținute din scanări statice, este important ca observațiile alese să aparțină formei respective, iar impactul observațiilor greșite sau pârghie existente în norul de puncte să fie minimizat. Aceasta a dus la concluzia clară că este necesară abordarea robustă în estimarea formelor.
Lucrarea este împărțită în șapte capitole, inclusiv unul introductiv și unul ce sintetizează rezultatele și concluziile lucrării. Celelalte capitole sunt destinate prezentării atât a noțiunilor teoretice cât și a studiului de caz ce demonstrează aplicabilitatea elementelor dezvoltate.

Noţiuni generale
4 Drd. ing.Vlad Gabriel OLTEANU
Capitolul II Noţiuni generale
II.1 Scurt istoric al dezvoltării sistemelor de scanare Tehnologiile de scanare se bazează pe sistemele de detecție și localizare RaDAR/LiDAR
(Radio Detection And Ranging / Light Detection and Ranging), ce permit determinarea distanțelor, orientării și vitezei de deplasare relative a obiectelor fixe sau aflate în mișcare cu ajutorul undelor electromagnetice.
Iniţial utilizate în aplicaţii statice, pe măsură ce sistemele satelitare de navigație (GNSS – Global Navigation Satellite Systems) au fost dezvoltate și utilizate din ce în ce mai mult de sectorul civil, iar sistemele inerțiale de navigație au devenit disponibile ca urmare a declasificării informațiilor militare de ghidare a proiectilelor, soluțiile de navigație complexe bazate pe fuziunea acestor senzori au căpătat un rol important în dezvoltarea sistemelor LiDAR mobile.
II.2 Principii elementare ale sistemelor LiDAR Principiul sistemelor de scanare se bazează pe tehnologiile LIDAR, ce permit determinarea
distanţelor, orientării şi vitezei de deplasare a obiectelor fixe sau aflate în mişcare cu ajutorul undelor electromagnetice.
Există în principiu două modalităţi de determinare a distanţei: Prima metodă, cunoscută în literatura de specialitate sub numele de „impuls-ecou” Metoda alternativă constă în emiterea continuă a unui fascicul de radiaţie laser, în
locul unui impuls Cele două metode prezentate mai sus prezintă doar determinarea distanţei dintre instrument
şi punctul scanat. Pentru a putea obţine poziţia acestuia într-un sistem de coordonate tridimensional sunt necesare două unghiuri. Scannerele terestre, ce fac obiectul prezentei lucrări, au incorporate un sistem de deviere a undei emise pe anumite direcţii precis determinate. De regulă, acest sistem este reprezentat de o oglindă sau o prismă pentagonală ce este rotită cu viteze foarte ridicate în plan vertical. În acest mod, sistemul de scanare realizează un profil vertical cu o densitate foarte ridicată de puncte. Pentru unghiul orizontal, instrumentele folosesc un servomotor ce roteşte întregul instrument în plan orizontal.
II.3 Sisteme de coordonate carteziene utilizate în navigație Acest subcapitol cuprinde o descriere a sistemelor de coordonate utilizate cu precădere în
domeniul sistemelor mobile de scanare terestră şi al navigaţiei în general. În speţă sunt descrise sistemul de coordonate cvas cvasi-inerţial geocentric (ECI – Earth Centered Inerital Frame), sistemul de coordonate neinerţial geocentric (ECEF - Earth Centered Earth Fixed Frame), sistemul de coordonate local şi sistemul de coordonate al vehiculului, precum şi relaţiile de legătura dintre acestea.

Stadiul actual la nivel național și internațional referitor la tematica abordată
5 Drd. ing.Vlad Gabriel OLTEANU
II.4 Cinematica mişcării Elementele de bază ce sunt studiate în cadrul acestui subcapitol sunt reprezentate de
exprimarea poziţiei în sistemele de coordonate carteziene, metodele de descriere a orientării dintre două sisteme (unghiuri Euler, matricea de rotaţie, cuaternioni), precum şi viteza şi acceleraţia între sistemele de coordonate.
II.5 Metode de estimare secvențială a observațiilor. Filtrul Kalman Filtrul Kalman este un algoritm de estimare recursiv dezvoltat de matematicianul american de
origine ungară R.E. Kalman (Kalman, 1960) şi îmbunătăţit sau adaptat ulterior de mulţi alţi autori. Acesta poate fi utilizat pentru a menţine în timp real estimări asupra parametrilor unui sistem ce se schimbă în timp, aşa cum sunt în cazul nostru poziţia, viteza, acceleraţia, pe baza unor măsurători afectate de erori.
Filtrul Kalman este alcătuit principial din 5 elemente de bază: vectorul de stare şi matricea sa de varianţă covarianţă, modelul sistemului, vectorul măsurătorilor şi matricea sa de varianţă covarianţă, modelul măsurătorilor şi algoritmul filtrului.
Capitolul III Stadiul actual la nivel național și internațional referitor la tematica abordată
III.1 Privire de ansamblu asupra dezvoltărilor din domeniu Această parte a lucrării reprezintă un studiu detaliat ce analizează situația la nivel național și
internațional în ceea ce privește echipamentele de scanare terestră mobilă existente, dezvoltate atât ca platforme modulare, în general de diverse centre de cercetare, precum și sisteme ca integrate, dezvoltate și comercializate de companii private.
Desigur, ținând cont de perioada dificilă din punct de vedere economic pe care Europa și Statele Unite au traversat-o și întrucât astfel de sisteme reprezintă la momentul actual soluții deloc ieftine, necesitând investiții majore ale companiilor, aceste sisteme au o distribuție destul de rară la nivel internațional și extrem de rară la nivelul României. De aceea, studiul este oarecum disproporționat din punct de vedere al echipamentelor existente sau dezvoltate internațional / național.
III.2 Sisteme terestre de scanare mobilă realizate la nivel internațional Printre sistemele terestre de scanare mobilă identificate la nivel internaţional se numără
Geomobil – Institut Cartografic de Catalunya (ICC), StreetMapper – 3D Laser Mapping & IGI mbH, LYNX Mobile MapperTM – Optech Inc., RIEGL VMX, TOPCON IP-S2, TRIMBLE – MX, MDL – Dynascan sau LEICA Pegasus-One
III.3 Situația la nivel național În țara noastră nu există un dezvoltator de astfel de sisteme destinate comercializării. Mai
mult, repartiția la nivel național a acestor sisteme este de asemenea scăzută, motivul principal fiind perioada de recesiune economică și mai ales costurile încă extrem de ridicate ale echipamentelor.

Stadiul actual la nivel național și internațional referitor la tematica abordată
6 Drd. ing.Vlad Gabriel OLTEANU
Un singur astfel de sistem de scanare mobilă a fost dezvoltat la nivelul României, ca urmare a unui proiect de cercetare finanțat în cadrul Programului Național de Cercetare, Dezvoltare Inovare II (PNCDI II). Din punct de vedere al arhitecturii platformei de scanare mobilă, sistemul realizat de compania S.C. C-TECH S.R.L. (Constanța) nu se diferențiază de cele realizate la nivel internațional.
O altă companie din România ce deține un astfel de sistem este S.C. Primul Meridian S.R.L. ce beneficiază în prezent de un sistem de scanare mobilă terestră Riegl VMX-250 (S.C. Primul Meridian S.R.L., 2013).
De asemenea, (Savu, 2010) menționează existența unui sistem mobil de scanare de tipul L-KOPIA (bazat pe un instrument de scanare al Z+F) ca aparținând Regionalei CF Brașov. Nu au fost identificate însă publicații suplimentare ce pot descrie capabilitățile sau aplicațiile în care a fost testat sistemul.

Senzori și sisteme de navigație utilizate în cadrul echipamentelor mobile de scanare terestră
7 Drd. ing.Vlad Gabriel OLTEANU
Capitolul IV Senzori și sisteme de navigație utilizate în cadrul echipamentelor mobile de scanare terestră
IV.1 Sisteme de radionavigație prin satelit Sistemele GNSS sunt acele sisteme satelitare ce permit utilizatorilor să îşi determine poziţia
prin utilizarea unor semnale radio transmise de sateliţii sistemului ce orbitează în jurul Pământului. Cel mai cunoscut dintre aceste sisteme este cel dezvoltat de Statele Unite denumit NAVSTAR GPS (NAVigation System with Timing And Ranging).
Pe lângă acesta, alte 3 mari sisteme sunt deja dezvoltate sau se află în curs de dezvoltare: sistemul GLONASS (GLObal’naya NAvigatsionnaya Sputnikova Sistema) dezvoltat de Rusia, sistemul GALILEO dezvoltat de Uniunea Europeană şi sistemul COMPASS dezvoltat de Republica Populară Chineză.
IV.2 Senzori inerțiali Senzorii utilizaţi în domeniul navigaţiei inerţiale, întâlniţi în literatură şi sub denumirea generică
de senzori inerţiali, sunt reprezentaţi cel mai des de accelerometre şi giroscoape. Accelerometrele măsoară forţa specifică iar giroscoapele măsoară viteza unghiulară fără a avea o referinţă externă. Instrumentele care măsoară viteza, acceleraţia sau viteza unghiulară raportate la alte elemente din mediul înconjurător nu intră în categoria senzorilor inerţiali.
Prezentul subcapitol încercă să prezinte succint cele două categorii de senzori inerţiali menţionate şi principiile de bază pe care acestea le folosesc. De asemenea, vor fi analizate şi principalele surse de erori ale fiecărui tip de instrument.
IV.3 Unități inerțiale de măsurare (IMU). Sisteme de navigație inerțiale (INS) Ansamblul de senzori utilizaţi pentru determinarea forţei specifice (accelerometre) şi a
vitezelor de rotaţie (giroscoape), poartă denumirea de Unitate Inerţială de Măsurare (Inertial Measurement Unit – IMU). Pentru aplicaţii ce necesită şi un calcul al poziţiei şi orientării vehiculului, este necesar ca IMU să fie completat cu un microprocesor ce rezolvă ecuaţiile de orientare şi de navigaţie. Ansamblul format din microprocesorul de navigaţie, unitatea inerţială de măsurare, sursa de energie şi sistemul de atenuare a vibraţiilor poartă denumirea de Sistem Inerţial de Navigaţie (Inertial Navigation System – INS).
IV.4 Sisteme de navigație complexe realizate prin cuplarea GNSS/INS Acest subcapitol motivează necesitatea unor sisteme complexe GNSS/INS pentru sisteme de
navigaţie, accentuând complementaritatea soluţiilor oferite de cele două tehnologii şi descriind totodată şi arhitecturile de cuplare.

Senzori și sisteme de navigație utilizate în cadrul echipamentelor mobile de scanare terestră
8 Drd. ing.Vlad Gabriel OLTEANU
IV.5 Realizarea sistemelor terestre mobile de scanare Poziţia punctelor măsurate în procesul de scanare poate fi determinată prin metoda
coordonatelor polare dar ele vor fi raportate la centrul instrumentului de scanare. Acesta se află în mişcare şi va avea coordonate variabile în raport cu timpul. De aceea este necesar să se determine cu precizie traiectoria pe care o va avea instrumentul în timpul scanării şi astfel poziţia sa în orice moment, având în vedere rata de scanare a punctelor.
Unitatea inerţială oferă soluţii optime în cazul scanărilor dinamice, însă, în scanarea terestră mobilă, din cauza mediului sau a condiţiilor de trafic, platforma purtătoare poate deveni statică. În acest caz, procesul de estimare nu va oferi soluţii optime, întrucât el se va baza doar pe observaţiile GNSS. Pentru a elimina această problemă de estimare în cazul în care platforma devine temporar statică, sistemele terestre mobile sunt dotate cu un senzor adiţional de măsurarea a distanţei montat pe roata vehiculului (DMI – Distance Measurement Instrument).

Modele de prelucrare în estimarea formei
9 Drd. ing.Vlad Gabriel OLTEANU
Capitolul V Modele de prelucrare în estimarea formei
V.1 Noţiuni generale despre teoria estimării Teoria estimării este o ramură a statisticii ce se ocupă cu estimarea parametrilor ce descriu
sau modelează un proces, fenomen sau obiect pe baza unui set de măsurători afectate de o componentă arbitrară.
Scopul estimării este acela de a trage concluzii, de a îmbunătăţi cunoștințele şi de a face predicţii ulterioare referitoare la fenomenul, procesul sau obiectul respectiv.
Relativ la domeniul la care se referă această lucrare, estimarea parametrilor este un proces ce apare în nenumărate faze ale scanărilor terestre mobile. Într-o primă fază, aceasta este implementată în determinarea poziţiei instantanee a receptoarelor GNSS ce fac parte din arhitectura generală a platformelor de scanare pe baza măsurătorilor de pseudodistanţe, de fază a purtătoarelor sau măsurători Doppler (Hofmann-Wellenhof, Lichtenegger, & Collins, 2001). Ulterior, o estimare a traiectoriei celei mai probabile a instrumentului este din nou o aplicaţie a estimării parametrilor, de această dată printr-un filtru Kalman ce integrează poziţiile de la echipamentele GNSS cu măsurătorile obţinute de la unităţile inerţiale (Groves, 2008). În sfârşit, în cazul exploatării norilor de puncte obţinuţi prin scanări terestre fie ele mobile sau statice, este de regulă necesară o modelare a obiectelor scanate, mai precis o determinare a formelor de ordin doi sau trei ce aproximează cel mai bine obiectele sau părţi ale acestora. Acest proces reprezintă tot un caz de estimare a parametrilor, care va fi de altfel tratat în această lucrare în mod special.
V.2 Estimatori Această parte a capitolului tratează o serie de estimatori nerobuşti împreună cu câteva definiţii
aferente acestora, în speţă estimatorul ideal nedeviat, metoda celor mai mici pătrate şi metoda verosimilităţii maxime.
V.3 Modelul de estimare Gauss-Markov O definiţie mai riguroasă a acestui model poate fi dată astfel (Koch, 1999): fie X o matrice n ×
u de coeficienţi cunoscuţi, β un vector de dimensiune u al parametrilor constanţi necunoscuţi, y un vector de dimensiune n al observaţiilor şi D(y) = σ2P-1 matricea n × n de varianţă-covarianţă a observaţiilor, unde σ2 este necunoscut. Dacă rangul matricei X este maxim şi egal cu u (întrucât se presupune că numărul de observaţii este cel puţin egal cu numărul de parametrii ce trebuie estimaţi n ≥ u) şi matricea P este pozitiv definită, atunci relaţiile următoare descriu modelul Gauss-Markov de rang maxim:
)(yEX =⋅β şi yyQPyD ⋅=⋅= − 212)( σσ
Prima relaţie este denumită modelul funcţional al modelului Gauss-Markov, în sensul în care ea descrie legăturile funcţionale ce se stabilesc între parametrii necunoscuţi şi observaţiile sau măsurătorile efectuate. A doua relaţie este denumită modelul stohastic al modelului Gauss-Markov

Modele de prelucrare în estimarea formei
10 Drd. ing.Vlad Gabriel OLTEANU
deoarece acesta conţine proprietăţile observaţiilor, legăturile sau corelaţiile dintre acestea şi pe baza sa se pot deduce ponderile observaţiilor (Moldoveanu, 2002).
V.4 Modelul de prelucrare Gauss-Helmert O definiţie mai riguroasă a modelului general de compensare este următoarea (Koch, 1999):
Fie X o matrice de dimensiuni n × u şi Z o matrice de dimensiuni n × r, ambele de coeficienţi cunoscuţi cu rang Z = n. Fie β un vector de dimensiune u de coeficienţi necunoscuţi, v un vector de dimensiune r de corecţii necunoscute cu valoare de aşteptare nulă (E[v] = 0) şi matrice de varianţă covarianţă
D(v)=σ2Qvv, cu σ2 factor pozitiv necunoscut şi Qvv o matrice de r × r cunoscută şi pozitiv definită, şi
w un vector de dimensiune n de termeni liberi cunoscuţi. Atunci:
0=++ wZvXβ cu 0][ =vE si 122)( −== vvvv PQvD σσ
este cunoscut sub denumirea de model mixt, model general de compensare sau model Gauss-Helmert. Similar modelului Gauss-Markov, prima relaţie de mai sus defineşte modelul funcţional al modelului Gauss-Helmert în timp ce ultima relaţie descrie modelul stohastic.
V.5 Metode de prelucrare robustă în cazul modelului Gauss-Markov Aplicarea estimatorilor prezentaţi în capitolul anterior pe un set de observaţii afectat de erori
grosolane va conduce la obţinerea unor rezultate mai mult sau mai puţin diferite faţă de cele ce ar fi obţinute dacă distribuţia erorilor ar fi una normală.
Identificarea şi eliminarea influenţei greşelilor din estimarea parametrilor de interes este absolut necesară. De asemenea, există situaţii în care anumite observaţii pot influenţa destul de mult parametrii estimaţi prin poziţia lor geometrică. Este riguros necesar ca şi aceste puncte să fie identificate pentru ca rezultatele să fie cele căutate.
Estimarea robustă a parametrilor pleacă de la ideea utilizării unei funcţii scop mai complexe care să diminueze influenţa greşelilor.
V.6 Metode de prelucrare robustă în cazul prelucrărilor clasice Un estimator poate fi numit robust, dacă rezultatele estimatorului nu sunt senzitive la
schimbări mici în distribuţia observaţiilor sau a populaţiei. Existenţei greşelilor în unele observaţii conduce la modificarea distribuţiei observaţiilor. Astfel, dacă estimatorul este insenzitiv faţă de aceste modificări ale distribuţiei şi oferă în continuare rezultatele optime atunci el se numeşte robust iar estimarea în sine poartă denumirea de estimare robustă.
Astfel, s-au dezvoltat o serie de estimatori ce înlocuiesc funcţia scop ce minimizează suma pătratelor minime cu alte funcţii. O primă clasă de estimatori este reprezentată de cei ce sunt obţinuţi plecând de la estimări cu verosimilitate maximă, aşa numiţii estimatori de tip M (sau M-estimators) (Huber, 1964). În această categorie fiind incluşi estimatorii Huber (Huber, 1964) şi Hampel (Hampel, 1986). O a doua clasă de estimatori robuşti poate fi cea a estimatorilor cu influenţă mărginită ce ţin cont şi de existenţa unor puncte pârghie. Aici asociem estimatorii de tip Mallows sau Schweppe (Wicki, 1999). A treia clasă de estimatori sunt estimatorii de tip Lp-Norm întrucât funcţia lor scop depinde de o putere a normei corecţiei (Koch, 1999). În ultima clasă de estimatori sunt incluşi estimatorii cu punct de cedare ridicat (high breakdown point).

Modele de prelucrare în estimarea formei
11 Drd. ing.Vlad Gabriel OLTEANU
V.7 Metode de prelucrare robustă în cazul modelului Gauss – Helmert În această secţiune s-a arătat că prelucrarea robustă în acest model este posibilă. În cazul
estimării robuste pentru modelul Gauss Markov s-a prezentat mai sus că aceasta constă în înlocuirea funcţiei scop ce presupunea minimizarea sumei pătratelor corecţiilor cu o funcţie mai generală.
Pentru a localiza şi repondera observaţiile greşite, ca şi în cazul modelului Gauss-Markov, se modifică modelul funcțional al modelului Gauss-Helmert prin introducerea unui nou parametru ∇ în procesul de estimare, parametru ce are rolul de a încapsula greşeala conţinută într-o anumită observaţie sau într-un grup de observaţii. În acest fel, greşeala este estimată în cadrul modelului Gauss-Helmert împreună cu ceilalţi parametri.
V.8 Prelucrarea robustă a formei pentru nori de puncte obţinuţi cu ajutorul sistemelor terestre de scanare În cazul observaţiilor de tip LiDAR pentru estimarea formei, fiecare punct va genera o ecuaţie
în modelul general de compensare Gauss-Helmert. Punctul aparţinând unei cuadrice, va satisface teoretic ecuaţia acesteia, însă, din cauza erorilor de măsurare ecuaţia va fi satisfăcută doar în urma corectării observaţiilor.
Nu toţi cei 10 parametri ai cuadricei sunt independenți şi de aceea modelul funcţional precedent trebuie completat cu o ecuaţie de condiţie între parametrii.

Studiu comparativ privind analiza formei pe baza scanărilor terestre mobile și statice
12 Drd. ing.Vlad Gabriel OLTEANU
Capitolul VI Studiu comparativ privind analiza formei pe baza scanărilor terestre mobile și statice
VI.1 Generalităţi În prima parte a capitolului sunt prezentate pe larg implementările estimatorilor robuşti pentru
analiza formelor, punând accent pe modul de reponderare al fiecăruia (acolo unde este cazul) sau pe modalitatea de estimare a parametrilor, precum şi caracteristicile şi particularităţile acestora în comparaţie cu metoda clasică de estimare a pătratelor minime. În acest sens sunt prezentate iniţial metodele de implementare pentru modelul Gauss-Markov cu scopul de a estima o formă des întâlnită în practică, după cum se va arăta spre finalul capitolului, şi anume estimarea ecuaţiei unui plan pe baza punctelor scanate. Ulterior, va fi analizat modul de implementare a analizei robuste a parametrilor unei cuadrice la modul general, principiul de reponderare, precum şi un proces pe care îl propunem pentru estimarea formei, proces de estimare ce se bazează atât pe estimatorii de tip M cât şi pe un estimator de tip high breakdown point. Motivaţia necesara adoptării acestui model va fi apoi detaliată.
În a doua parte a capitolului sunt prezentate pentru început estimări pe baza diverselor simulări ale unor cuadrice în diferite poziţii faţă de sistemul de coordonate ales, în aşa fel încât să se poată realiza o validare a algoritmilor implementaţi, algoritmi ce trebuie să analizeze şi să prevadă toate situaţiile posibile de analiză a formei. În acest sens vor fi studiaţi nori de puncte aferenţi unor forme cărora li se adaugă ulterior un zgomot pentru a simula cât mai bine măsurătorile. De asemenea, în setul de date vor fi introduse intenţionat greşeli pentru a analiza răspunsul estimatorilor implementaţi în aceste cazuri.
În ultima sa parte, capitolul cuprinde rezultatele estimărilor asupra unor nori de puncte obţinuţi din scanări reale atât statice cât şi dinamice. Scopul final al lucrării este acela de a arăta că utilizarea estimatorilor robuşti împreună cu date obţinute din scanări dinamice conduce către rezultate similare celor obţinute din scanări statice, unde norul de puncte este de regulă mai dens şi în care erorile coordonatelor punctelor scanate sunt cauzate doar de erorile de determinare a distanţei şi a unghiurilor sub care este emis fasciculul de unde.
VI.2 Implementarea în Matlab a estimatorilor pentru modelele prezentate Iniţial a fost implementată metoda celor mai mici pătrate pentru estimarea parametrilor
planului, metodă ce are la baza minimizarea sumei pătratelor corecţiilor. Similar au fost implementate funcţii de estimare a parametrilor pentru estimatorii Huber,
Hampel, Biber, LMS şi L1-Norm. Algoritmul estimării parametrilor cuadricei este unul iterativ, plecând de la valori aproximative
ale parametrilor determinate printr-o estimare nerobustă.

Studiu comparativ privind analiza formei pe baza scanărilor terestre mobile și statice
13 Drd. ing.Vlad Gabriel OLTEANU
Meniu principal pentru importare,
exportare si procesare date
Selectarea tipului de suprafaţă estimata şi a
estimatorului
Diferite opţiuni necesare în funcţie de estimatorul
selectat
Opţiuni referitoare la vizualizarea
grafică a observaţiilor
şi/sau a rezultatelor şi
informaţii referitoare la prelucrare
Vizualizarea unor grafice suplimentare cu privire la rezultate (corecţii, ponderi în urma
iteraţiilor) precum şi alte opţiuni de vizualizare referitoare la grafic
Reprezentarea grafică a observaţiilor şi a formei estimate pe baza opţiunilor selectate
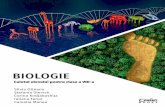
Figura VI-1 – Imagine de ansamblu a interfeţei şi descrierea grafică a opţiunilor implementate
După cum se poate observa, interfaţa permite într-o primă etapă introducerea datelor din fişiere de observaţii de tip *.txt. După introducerea datelor, utilizatorul poate previzualiza datele prin bifarea căsuţei Preview Data. Această opţiune îi poate oferi utilizatorului o imagine de ansamblu a datelor studiate, ajutându-l pe acesta să selecteze la pasul următor tipul formei estimate în sensul în care aceasta este un plan, caz în care prelucrarea se va face pe baza modelului Gauss-Markov prezentat în capitolele precedente, sau o suprafaţă pătratică, caz în care estimarea se face pe baza modelului Gauss-Helmert. Tot aici, utilizatorul poate selecta estimatorul dorit în prelucrarea observaţiilor. În funcţie de estimatorul selectat, anumite elemente suplimentare devin accesibile pentru definire de către utilizator. Pentru exemplificare, sunt prezentate în figura de mai jos opţiunile ce devin active pentru utilizator în cazul selectării din lista de estimatori a estimatorului Hampel sau LMS.
După selectarea opţiunilor aferente se poate începe procesul de estimare a parametrilor formei prin modalitatea aleasa. După terminarea procesului, în fereastra din dreapta vor putea fi vizualizate observaţiile, suprafaţa estimată, greşelile identificate etichetele punctelor precum şi tipul formei estimate.

Studiu comparativ privind analiza formei pe baza scanărilor terestre mobile și statice
14 Drd. ing.Vlad Gabriel OLTEANU
VI.3 Studiu pe baza obiectelor simulate Pentru a putea utiliza interfaţa creată în estimarea formelor paragrafele următoare tratează
rezultatele obţinute prin studiul unor obiecte simulate în care s-au introdus voit un anumit număr de greşeli.
Într-o primă etapă sunt studiate rezultatele obţinute pentru estimarea parametrilor unui plan prin diverse modele de prelucrare prezentate anterior.
Pentru aceasta s-a realizat în Matlab funcţia simulatePlane.m ce are rolul de a genera un număr de observaţii pentru un plan cu o anumită abatere standard definită de utilizator, în care se introduc forţat un număr de greşeli, de asemenea definit de utilizator. Opțional se pot introduce și o serie de puncte pârghie pentru a studia și metoda estimatorilor de a identifica și folosi în estimare aceste observații. Funcția creată generează doua fișiere ASCII ce conțin norul de puncte și respectiv informații despre norul generat.
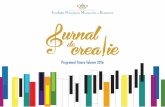
Interfaţa dezvoltată a fost utilizată pentru a estima parametrii de interes ai unui plan pe baza unor observații simulate în care s-au introdus greșeli. În acest sens a fost simulat un set de 150 de observații în care au fost introduse 6 greșeli.
Figura VI-2 – Puncte etichetate / suprafață estimată
Pentru a realiza simularea observațiilor aferente unei cuadrice a fost implementată funcția
simulateQuadric.m ce generează un nor de puncte cu o anumită abatere medie pătratică aferent unei forme pătratice alese de utilizator sau generată arbitrar.

Studiu comparativ privind analiza formei pe baza scanărilor terestre mobile și statice
15 Drd. ing.Vlad Gabriel OLTEANU
Estimator Parametrii planului Ab. med. pătratică
[m]
Greșeli introduse / identificate
Număr iterații
Timp estimare
[s]
Simulare +15.00 +25.00 +8.50 0.01 64, 97, 102, 95, 142, 31
- -
LSE +14.937 +25.106 -2.601
7.58 - 1 0.68
Huber +15.000 +25.000 +8.463
0.12 64, 97, 102, 95, 142, 31
8 0.78
Hampel +15.000 +25.000 +8.470
0.01 64, 97, 102, 95, 142, 31
8 0.61
Biber +15.000 +25.000 +8.464
0.01 64, 97, 102, 95, 142, 31
8 0.87
Data snooping +15.000 +25.000 +8.469
0.01 64, 97, 102, 95, 142, 31
8 0.65 (fără eliminare)
LMS (Combinatorial)
Inaplicabil în acest caz
LMS (Subsample)
+15.000 +25.000 +8.424
0.01 -
13 (err = 0.1%,
prob 99%)
0.52
LMS (Subsample)
+14.999 +25.002 +8.408
0.01 -
4 (err = 0.1%, prob 95%)
0.59
L1-Norm +15.00 +25.00 +8.46
0.04 - 10 0.64
Tabelul VI-1 - Rezultate obținute cu ajutorul diferiţilor estimatori implementaţi

Studiu comparativ privind analiza formei pe baza scanărilor terestre mobile și statice
16 Drd. ing.Vlad Gabriel OLTEANU
Pentru a exemplifica apelarea și rularea funcției, au fost simulate observații aferente unui paraboloid eliptic fără greșeli şi aferente unui elipsoid in care se introduc voit un număr de 3 greșeli (din totalul de 250 de puncte). Procesul de simulare este oarecum interactiv în sensul în care utilizatorul poate să selecteze zone ale cuadricei în care algoritmul să genereze observaţii.
După generare, fişierele cu nori de puncte au fost importaţi în interfaţa creată. În cazul paraboloidului, suprafaţa estimată a fost coincidentă cu cea simulată, dovedind că estimarea nerobustă a cuadricelor funcţionează.
Figura VI-3 – Rezultatele obținute în urma prelucrării / Comparație grafică între simulare și estimare
Pentru cazul observaţiilor aferente elipsoidului în care au fost introduse şi greşeli se observă o abatere extrem de mare între parametrii estimați și cei teoretici. La nivel grafic acest lucru se traduce și printr-o identificare greșită a formei. În timp ce forma teoretică este un elipsoid, forma identificată este aceea a unui hiperboloid cu o pânză.
Figura VI-4 – Rezultatele estimare nerobustă / robustă a formei în cazul prezenţei greşelilor
În cazul apelării metodelor robuste pentru estimare, se obțin rezultate mult îmbunătățite, însă acestea necesită timpi destul de ridicați de estimare din cauza procesului de testare pe fiecare

Studiu comparativ privind analiza formei pe baza scanărilor terestre mobile și statice
17 Drd. ing.Vlad Gabriel OLTEANU
observație în parte. Criteriile de estimarea robustă sunt respectate în sensul în care influența observațiilor asupra parametrilor este diminuată. Teste au arătat însă ca, în forma actuală a implementării, există cazuri în care estimatorul identifică mai multe greșeli decât cele generate. Acest lucru este cauzat de forma pătratică estimată ce se apropie foarte mult de observațiile greșite (în special pentru cazul generării formelor pătratice închise).
VI.4 Studiu pe baza măsurătorilor reale A doua parte a studiului de caz aferent acestei lucrări are la bază estimarea formelor plane și
pătratice pe baza observațiilor reale provenite de la sistemele de scanare mobile și statice. În ceea ce privește datele provenite de la sistemele de scanare mobile, acestea au fost puse
la dispoziție de către S. C. Primul Meridian SRL și constau în două zone extrase dintr-un nor de puncte obținut cinematic cu ajutorul sistemului de scanare mobilă Riegl VMX250 în cadrul unui proiect privat. Datele colectate se află în două localități din județul Teleorman: satul Gresia, comuna Stejaru situat la aproximativ 10 km NV de orașul Roșiorii de Vede și satul Izvoarele, comuna Izvoarele situat la aproximativ 20km S de Alexandria.
O vedere de ansamblu a datelor obținute se poate observa în imaginile de mai jos obținute cu ajutorul unei versiuni trial a Bentley Pointools.
Din norii de puncte vizualizați mai jos au fost selectate zone reprezentative în care s-au putut identifica forme plane sau pătratice pentru a putea fi estimate cu ajutorul interfeței create. Pentru aceste zone au fost apoi realizate scanări statice cu ajutorul unui instrument de scanare Riegl VZ-400 pus la dispoziție de Institutul de Geografie al Academiei Române în luna decembrie a anului 2013.
Figura VI-5 – Amplasamentul zonelor de test Izvoarele / Gresia

Studiu comparativ privind analiza formei pe baza scanărilor terestre mobile și statice
18 Drd. ing.Vlad Gabriel OLTEANU
Figura VI-6 – Nori de puncte obținuți cu ajutorul tehnologiilor de scanare mobilă în satul Gresia și în satul
Izvoarele (Teleorman) previzualizaţi în Bentley Pointools
Figura VI-7 –Scanări statice în zona Gresia

Studiu comparativ privind analiza formei pe baza scanărilor terestre mobile și statice
19 Drd. ing.Vlad Gabriel OLTEANU
În etapele preliminare estimării, pentru scanările statice, în modul postprocesare s-a realizat în primă fază importarea datelor și registrația norilor de puncte (acolo unde a fost cazul) precum și georeferențierea.
Ulterior s-au importat datele cinematice din cele două zone de test într-o versiune trial a Bentley Pointools pentru vizualizare facilă și salvare în fișiere de tip *.pod. Ulterior, acestea au fost importate în Bentley Microstation (versiune trial) cu scopul de a extrage observații aferente unor forme plane sau pătratice pentru a fi estimate apoi cu ajutorul interfeței MIRUNA.
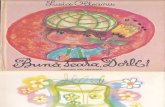
În cele ce urmează au fost exportate din norul de puncte observațiile aferente unei forme plane (acoperișul casei din zona Izvoarele). Imagini ale acestui obiectiv sunt prezentate în figura de mai jos, imagini preluate de camera echipamentului de scanare cinematică.
Figura VI-8 – Obiectivul studiat din zona Izvoarele (imagini preluate de camera sistemului VMX)
După importarea norului de puncte s-au aplicat succesiv filtrări (de tip Mask sau Boundary) ale acestuia pentru a obține doar punctele aferente zonei de interes. Pentru a testa pe date reale răspunsul estimatorilor în cazul acestor observații au fost introduse în mod voit și câteva puncte greșite în procesul de selectare a observaţiilor aferente formei.
Norul de puncte obținut conține 3470 puncte. După exportarea datelor în format ASCII *.xyz s-a rulat aplicația MIRUNA din mediul MATLAB. A fost procesat norul de puncte exportat utilizând diverși estimatori.
Interfaţa a estimat corect suprafața plană și a eliminat influența observațiilor greșite. În cazul estimatorilor ce pot localiza greșelile, acestea au fost identificate.

Studiu comparativ privind analiza formei pe baza scanărilor terestre mobile și statice
20 Drd. ing.Vlad Gabriel OLTEANU
Figura VI-9 – Identificarea greșelilor și estimarea parametrilor cu ajutorul interfeței MIRUNA
Estimator Parametrii planului
Ab. med. pătratică
[m]
Greșeli introduse / identificate
Număr iterații
Timp estimare
LSE -0.1313 0.5403 145.03
0.09 - 1 2.43 s
Huber -0.1271 0.5405 141.29
0.025
3146 615 1408 2301 1999 101 1714 1666
2938 2742 2930 2647 281 1257 359 619
2508 1866 2750 3351 2764 2116 2853 1359
3279 853
27 4.88 s
Hampel -0.1269 0.5405 141.11
0.016
3146 615 1408 2301 1999 101 1714 1666
2938 2742 2930 2647 281 1257 359 619
2508 1866 2750 3351 2764 2116 2853 1359
3279 853 187 6 316 2449 3303
1169
33 11.02 s
Biber -0.1271 0.5405 141.29
0.025
3146 615 1408 2301 1999 101 1714 1666
2938 2742 2930 2647 281 1257 359 619
2508 1866 2750 3351 2764 2116 2853 1359
27 10.84 s

Studiu comparativ privind analiza formei pe baza scanărilor terestre mobile și statice
21 Drd. ing.Vlad Gabriel OLTEANU
3279 853
LMS (Comb) Inaplicabil în acest caz
LMS (Subsample)
-0.1256 0.5357 140.22
0.002 - 13 (err = 0.1%,
prob 99%) 12.50 s
L1-Norm -0.1266 0.5384 140.94
0.14 - 32 0.64
Tabelul VI-2 - Rezultate obținute cu ajutorul diferiţilor estimatori pentru forme plane
Același proces de filtrare succesivă s-a aplicat ulterior rezultatelor scanării statice pentru obținerea norilor de puncte aferenți celor două zone ale acoperișului.
Figura VI-10 – Norul de puncte static pentru zona Izvoarele
Pentru a face o estimare cantitativă a abaterilor norului de puncte obținut cinematic față de cel obținut prin metode statice, s-a considerat ca suprafață de referință suprafața plană estimată robust cu ajutorul estimatorului Hampel și față de aceasta s-au determinat abaterile norului de puncte din care au fost extrase greșelile identificate de același estimator.
În graficul de mai jos au fost apoi raportate erorile, împreună cu valoarea medie (roșu) și abaterea standard(verde). Se poate observa că valoarea medie a diferenței este de 2.1 cm cu o abatere standard de aproximativ 1.4 cm, ceea ce conduce la concluzia că astfel de scanări împreună

Studiu comparativ privind analiza formei pe baza scanărilor terestre mobile și statice
22 Drd. ing.Vlad Gabriel OLTEANU
cu estimări robuste pot fi folosite pentru a realiza modele ce se apropie ca nivel de precizie de scanările statice.
Figura VI-11 – Diferențe obținute între norul de puncte obținut cinematic și suprafata de refeință estimată
robust pe baza scanărilor statice în zona Izvoarele
În ceea ce privește estimările formelor pătratice, în zona Izvoarele, din norul de puncte obținut cinematic au putut fi extrași nori de puncte aferenți coloanelor casei scanate (hiperboloizi cu o pânză foarte apropiați ca formă de cilindri eliptici).
După extragerea acestora, utilizând interfața implementată, s-au estimat formele și s-au realizat comparațiile aferente, similar celor realizate în cazul formelor plane.
Pentru zona Gresia, norul de puncte cinematic conține, după cum se poate observa în imaginile de mai jos, doar observații pe partea dinspre drum a fântânii, în timp ce pentru scanarea statică ce a avut loc din stații multiple, observațiile acoperă întreaga suprafață a fântânii.
Figura VI-12 – Nor de puncte aferent fântânii din zona Gresia obținut prin scanări statice/dinamice

Studiu comparativ privind analiza formei pe baza scanărilor terestre mobile și statice
23 Drd. ing.Vlad Gabriel OLTEANU
Figura VI-13 – Estimarea formei fântânii din zona Gresia cu ajutorul interfeței MIRUNA
Figura VI-14 – Compararea setului de date cinematic cu forma estimată robust pe baza observațiilor statice
(Gresia)

Studiu comparativ privind analiza formei pe baza scanărilor terestre mobile și statice
24 Drd. ing.Vlad Gabriel OLTEANU
Cu ajutorul interfeței au fost estimate robust cele două forme rezultând parametrii aferenți unor hiperboloizi cu o pânză. Trebuie menționat că pentru a putea compara rezultatele, observațiile cinematice au fost reduse la centrul de greutate obținut din setul de observații statice. Pentru a analiza rezultatele au fost implementate pe de-o parte soluții grafice de vizualizare suprapusă a formelor/observațiilor și pe de altă parte soluții analitice. Pentru acestea, s-a folosit următoarea abordare: după estimarea formei robuste din măsurătorile cinematice și identificarea greșelilor, acestea au fost eliminate iar pentru restul punctelor s-a determinat distanța minimă până la suprafața de referință considerată a fi suprafața estimată robust pe baza măsurătorilor statice.
Pentru început, urmărind reprezentarea grafică suprapusă a celor două forme se pot evidenția câteva concluzii. Ca dimensiuni, formele se apropie una de cealaltă, deși la nivelul parametrilor există diferențe ce par relativ mari. Mai mult decât atât se poate observa că există o deplasare la nivel de coordonate atât a formelor cât și a observațiilor. Această sursă de erori nu poate fi asociată estimării în sine ci metodei de referențiere alese.
La nivel analitic, se poate observa din graficul erorilor estimate că observațiile cinematice se apropie de suprafața de referință (în medie 6 cm). Se poate deci concluziona că la nivel de formă estimată rezultatele oferite sunt bune, însă o problemă importantă este referenţierea formei respective.
Figura VI-15 – Estimarea robustă a formei coloanelor case din zona Izvoarele pe baza măsurătorilor statice

Studiu comparativ privind analiza formei pe baza scanărilor terestre mobile și statice
25 Drd. ing.Vlad Gabriel OLTEANU
Pentru zona Izvoarele, rezultatul estimării formei pentru norul de puncte static aferent uneia dintre coloanele casei studiate. Se poate observa că estimatorul robust obține în cazul acestui obiect o aproximare pe baza unui hiperboloid cu două pânze, ai cărui parametrii au fost exportați în fișierul HTML prezentat, de asemenea mai jos.
Similar cazului trecut a fost estimată și forma coloanei pe baza scanărilor cinematice. În cazul coloanei studiate din zona Izvoarele, dimensiunea obiectului este relativ mică iar numărul de puncte aferent acesteia obținut din scanarea cinematică este extrem de mic (aproximativ 250 de puncte). Mai mult decât atât ele sunt distribuite pe o zonă restrânsă a coloanei, fapt ce induce în eroare estimatorul, în sensul în care, pe zone restrânse, un cilindru sau un hiperboloid cu o pânză se poate aproxima foarte ușor și cu alte forme (e.g. hiperboloid cu două pânze). Acest lucru a fost identificat în cazul coloanei respective, o imagine grafică sugestivă fiind prezentată de asemenea mai jos.
Din punct de vedere al abaterilor observațiilor cinematice față de suprafața estimată robust pe baza observațiilor statice (scanare densă dintr-o singură poziție cu peste 5000 de puncte), aplicând algoritmul menționat mai devreme se poate observa că eroarea (ca medie și deviație standard) se menține în aceeași zonă ca și în cazul precedent. Există un risc în estimarea formei (chiar și robust) în situația în care setul de observații ce defineşte forma nu este distribuit pe o parte semnificativă a cuadricii. Astfel, deși pentru zona restrânsă se pot obține abateri foarte mici, prin extrapolarea formei, aceasta poate diverge față de forma reală.
Figura VI-16 – Estimarea robustă a formei coloanelor case din zona Izvoarele din măsurători cinematice
Figura VI-17 – Compararea setului de date cinematic cu forma estimată robust din observații statice (Izvoarele)

Concluzii și viitoare direcții de cercetare
26 Drd. ing.Vlad Gabriel OLTEANU
Capitolul VII Concluzii și viitoare direcții de cercetare
VII.1 Concluzii Din punct de vedere al eficienței colectării de date, sistemele terestre mobile de scanare
reprezintă soluția ideală la momentul actual. Avantajele aduse de acestea sunt reprezentate de viteza de colectare a datelor, costurile de operare și posibilitățile de instalare pe orice fel de platformă. În ceea ce privește precizia, nu se poate vorbi de o precizie unitară a acestora și de aceea un studiu general de comparare a preciziilor sistemelor terestre mobile cu alte sisteme de colectare de date este destul de greoaie și se poate face doar în anumite condiții. Precizia sistemelor terestre mobile de scanare nu depinde doar de precizia instrumentelor de scanare ci mai ales de precizia de determinare a traiectoriei și orientării platformei purtătoare. Acest lucru este realizat prin sisteme GNSS/INS care răspund bine în medii mai puțin solicitante, în care există semnal satelitar aproape permanent, sau altfel spus nu există pierderi pe timp lung a acestora (peste 1 minut). În alte zone, în care acest lucru nu se întâmplă, preciziile de poziționare descresc exponențial. Există exemple (Boavida, Oliveira, & Santos, 2012) în care s-a arătat că se pot obține totuși precizii bune ale punctelor colectate folosind tehnici combinate de realizare a observaţiilor.
Prin prisma celor menționate mai sus, prezenta lucrare încearcă să realizeze un studiu comparativ între sistemele de scanare terestre mobile și statice raportat la estimarea formelor plane și pătratice. Acest studiu are la bază implementări proprii în mediul de lucru MATLAB ale algoritmilor de estimare robustă şi nerobustă descrişi în capitolele teoretice ale lucrării şi testarea cu ajutorul unei interfeţe implementate în acelaşi mediu de dezvoltare a datelor simulate sau provenite din scanări terestre mobile şi statice.
Referitor la rezultatele obținute, se poate concluziona în primul rând că sistemele terestre mobile pot fi folosite în estimarea formei pentru obiective de dimensiuni medii sau mari (clădiri, antene parabolice, ș.a.m.d.), ele având avantajul colectării rapide a unui nor de puncte georeferențiat și de dimensiuni mari. În aceste cazuri, sistemele, completate de un algoritm de estimare robustă optimizat, asigură precizii bune în estimare, comparabile cu cele obținute prin scanări statice. Din punct de vedere al eficienței însă, sistemele reprezintă soluții mult mai bune decât variantele statice ale sistemelor, singurul deficit temporar al acestora fiind reprezentat de costurile de achiziție extrem de mari.
Pentru obiective de dimensiuni mici, estimarea formei cu ajutorul acestor sisteme nu este o soluție întrucât densitatea de puncte obținute prin scanare cinematică nu este suficient de ridicată. În acest caz pot fi utilizați estimatori cu breakdown point ridicat (LMS) pentru a obține totuși soluții optime, însă rezultatele nu pot fi comparate cu soluțiile statice de scanare în care densitatea punctelor poate fi chiar de sute de mii de ori mai mare.
Testele pe simulări de nori de puncte au arătat că estimarea robustă a formei este un necesar în cazul prezenței valorilor extreme în cazul funcțiilor. Utilizarea estimatorilor clasici (BUE, LSE) în aceste cazuri conduce la estimarea nu doar a unor parametri diferiți dar și a unor forme diferite.
O mențiune importantă ce trebuie făcută este aceea că în seturile de date cinematice avute la dispoziție nu a existat un număr mare de forme pătratice ce s-au putut utiliza.

Concluzii și viitoare direcții de cercetare
27 Drd. ing.Vlad Gabriel OLTEANU
VII.2 Contribuții personale Pe baza celor descrise în paragrafele precedente se vor menționa în cele ce urmează
contribuțiile personale ale autorului în raport cu tematica studiată. Raportat la problema studiată, lucrarea aduce contribuţii în special în partea de estimare a
formelor pătratice pe baza observaţiilor provenite de la sistemele mobile de scanare, fixând totodată limitele şi posibilităţile de utilizare a acestora în aplicaţiile de estimare a formelor.
Cel mai important livrabil al lucrării este reprezentat de aplicația de estimare implementată în mediul MATLAB®. După cum a fost arătat în cadrul lucrării, aplicația dezvoltată beneficiază de o interfață Windows cu ajutorul căreia utilizatorul poate încărca norii de puncte pentru care se dorește estimarea formei. Aceștia pot fi vizualizați monocolor sau, daca fișierul de intrare conține valori RGB, în culori naturale.
Software-ul implementat permite apoi estimarea formelor plane sau pătratice cu ajutorul diverşilor estimatori robuşti şi nerobuşti implementaţi precum și vizualizarea suprafețelor estimate sau grafice ale ponderilor și corecțiilor obținute în urma procesului aplicat.
Trebuie subliniată totodată implementarea proprie a diverşilor estimatori robuşti şi nerobuşti pentru estimarea formelor (LSE, Huber, Hampel, Biber, LMS, L1-Norm).
Interfața creată beneficiază de implementarea algoritmilor de estimare robustă pentru forme plane folosind modelul Gauss-Markov sau pentru forme pătratice folosind modelul Gauss-Helmert.
Ca o contribuţie suplimentară, lucrarea a arătat posibilitatea de identificare robustă a muchiilor prin dezvoltarea unor rutine Matlab® separate de interfaţa principală care să permită estimarea robustă a formelor plane şi realizarea şi evidenţierea intersecţiei acestora.
După estimarea formei, interfața permite generare unui raport în format HTML, conținând parametrii estimați, greșelile identificate (acolo unde este cazul), precum și alte detalii aferente prelucrării. De asemenea, la solicitarea beneficiarului se pot adăuga alte opțiuni exportării.
Este necesar să fie menţionată și analiza rezultatelor pe nori de puncte generați pe baza unor forme simulate. În acest sens, o contribuție personală o reprezintă și seria de funcții dezvoltate ce permit utilizatorului să genereze automat sau semiautomat nori de puncte în care sunt introduse greșeli sau puncte pârghie. Atât pentru simularea formelor plane cât şi pentru simularea formelor pătratice au fost dezvoltaţi algoritmi individuali extrem de flexibili care generează nori de puncte aferenţi unor parametri arbitrari sau aleşi de utilizator. Mai mult, pentru cazul formelor pătratice, generarea formei şi a norului de puncte se realizează parţial interactiv în sensul în care utilizatorul poate defini o serie de eşantioane aferente formei generate (arbitrară sau solicitată) care să minimizeze timpul de generare dar şi distribuţia punctelor pe anumite zone ale formei.
O altă contribuție importantă a lucrării este realizarea unei analize comparative între scanarea statică și cea mobilă în ceea ce privește estimarea formelor plane sau pătratice, cu scopul de a trage concluzii referitoare la posibilitățile de utilizare a sistemelor mobile în aplicații industriale ce necesită astfel de estimări. Această analiză a avut la bază utilizarea software-ului dezvoltat cu ajutorul căruia au fost analizaţi nori de puncte aferenţi aceluiaşi obiectiv în diferite configuraţii pentru a putea trage concluzii cu privire la posibilităţile de estimare a formei pe baza scanărilor terestre mobile.
Pentru a asigura consistenţa analizei comparative pe baza celor două tipuri de echipamente au fost realizate măsurători statice şi dinamice pe aceleaşi zone de test în care au fost identificate atât

Concluzii și viitoare direcții de cercetare
28 Drd. ing.Vlad Gabriel OLTEANU
forme plane cât şi pătratice. A fost astfel definit şi un flux de prelucrare a observaţiilor pentru a putea realiza o comparaţie numerică a celor două metode de colectare a informaţiilor geospaţiale.
Totodată, un alt element nou adus de lucrare îl reprezintă raportul efectuat cu privire la stadiul actual al dezvoltărilor din domeniu. Raportul prezintă arhitectura sistemelor dezvoltate la nivel național și internațional, punând accent pe utilizările practice ale acestora. Sunt incluse aici sistemele dezvoltate de universități sau centre de cercetare dar și echipamentele produse de companiile private în scopuri de comercializare.
La nivel național, lucrarea contribuie la dezvoltarea sistemelor mobile terestre de scanare. Pe de-o parte, prin prezentarea aplicațiilor posibile și prin analiza realizată, lucrarea contribuie la dezvoltarea acestora la nivelul utilizării în diverse domenii iar pe de altă parte la nivelul dezvoltării fizice a sistemelor, prezenta teză tratând și aspectele de arhitectură a sistemelor, funcționare, estimare secvențială a parametrilor de poziție a platformei purtătoare, etc.
Lucrarea aduce o altă contribuție la nivel național prin realizarea studiului inclus în capitolul IV, ce prezintă majoritatea tipurilor de senzori inerțiali existenți (accelerometre și giroscoape), împreună cu principiile de funcționare ale acestora, preciziile asigurate și perspectivele de dezvoltare.
Mai mult, trebuie menționat că tematica abordată reprezintă în sine un subiect nou în cadrul tezelor de doctorat la nivel național, existând o singură teză ca referință în domeniu (Savu, 2010), însă aceasta tratează utilizarea unui sistem pentru căile de comunicație și mai puțin arhitectura sistemelor sau mijloacele de estimare a formei.
VII.3 Direcții de cercetare propuse în legătură cu tematica abordată Elementele implementate pot fi considerate un prim pas în această direcție a estimării formei
pe baza norilor de puncte proveniți de la scanări mobile. Vom prezenta în această secțiune o serie de direcții ce ar putea fi urmate pentru a continua cercetările în domeniul ales în concordanță cu direcțiile generale ale dezvoltărilor tehnologice și de piață.
O primă direcție ce ar putea fi considerată este utilizarea estimării robuste a formei în procesele de calibrare a sistemelor. În acest sens se poate studia posibilitatea prin care, cunoscând parametrii formei unui obiect ce se poate scana prin tehnologii mobile, prin estimarea robustă a formei să se determine parametrii de orientare interioară ai sistemului.
După cum prezentam încă din capitolul introductiv al acestei lucrări, tendința tehnologică a sistemelor este de miniaturizare și scădere a costurilor. Din această perspectivă o viitoare direcție de cercetare este reprezentată de posibilitatea de utilizare a instrumentelor de scanare low cost împreună cu sisteme de navigație ieftine bazate pe senzori inerțiali (preferabil MEMS sau CAI) și cu echipamente GNSS multiconstelație-multifrecvență.
Tot în acest domeniu, pentru echipamente complexe se pot studia și dezvolta tehnici noi de fuziune a senzorilor GNSS/INS prin cuplare de tip ultra-tightly (super-strânsă) sau deeply coupling. Tehnicile de cuplare liberă sau strânsă sunt momentan mature și folosite în multe cazuri de navigație bazată pe instrumente de acest tip, însă pentru aplicații de scanare mobilă celelalte moduri de cuplare ar putea furniza rezultate mult îmbunătățite.
La nivel aplicativ, considerăm utilă extinderea aplicațiilor în care aceste sisteme sunt folosite. Dintre acestea putem menționa: monitorizarea prin scanare mobilă infrastructurilor critice, scanarea autostrăzilor și a drumurilor europene și naționale cu scopul de a evalua studiul de degradare și necesitatea unor intervenții sau identificarea imobilelor fără autorizații de construire în localități.

Concluzii și viitoare direcții de cercetare
29 Drd. ing.Vlad Gabriel OLTEANU
De asemenea, având în vedere o altă direcție tehnologică a companiilor producătoare de astfel de echipamente, și anume realizarea sistemelor UAV dotate cu echipamente LiDAR, este necesar să se studieze posibilitățile de integrare a norilor de puncte proveniți din tipuri diferite de sisteme, ce oferă precizii diferite și chiar informații diferite.

Bibliografie
30 Drd. ing.Vlad Gabriel OLTEANU
Bibliografie 3DLM & IGI. (2012). Street Mapper. Retrieved 04 23, 2014, from Street Mapper - Gallery:
http://www.streetmapper.net/gallery 3DLM. (2006, Iulie/August). Accurate Terrestrial Laser Scanning from a Moving Platform. Geomatics
World , pp. 28-30. Akkaya, A., & Tiku, M. (2004). Robust Estimation and Hypothesis Testing. New Delhi: New Age
International. Alamus, R., Baron, A., Bosch, E., Casacuberta, J., Miranda, J., Pla, M., et al. (2004). On the accuracy
and performance of the Geomobil system. Proceedings of the XX Congres of the ISPRS. ISPRS. Aronowitz, F. (1999). Fundamentals of the Ring Laser Gyro. In R. a. RTO, Optical Gyros and their
Application (pp. 3-1 - 3-45). NATO. Baarda, W. (1968). A testing procedure for use in geodetic networks. Delft: Publications on Geodesy
Vol 2, Nr. 5. Boavida, J., Oliveira, A., & Santos, B. (2012). Precise Long Tunnel Survey using the Riegl VMX-250
Mobile Laser Scanning System. Riegl LiDAR 2012 User Conference. Orlando: Riegl. Coșarcă, C. (2009). Sisteme de măsurare în industrie. București: Conspress. Coșarcă, C. (1999). Teza de doctorat. București: UTCB. Cosentino, R., Diggle, D., Uijt de Haag, M., Hegarty, C., Milbert, D., & Nagle, J. (2006). Differential
GPS. In E. Kaplan, & C. Hegarty, Understanding GPS: Principles and Applications (Second edition) (pp. 379-454). Norwood, Massachusetts: Artech House.
Council of the European Union. (1999). Council Resolution 1999/C 221/01. Bruxelles: Official Journal of the European Communities.
Drixler, E. (1993). Analyse der Lage und Form von Objecten im Raum. DGK Reihe C, Heft 409 . Eissfeller, B. (2008, Iulie 21-31). GNSS/INS Sensor Fusion. Second International Summer School on
GNSS: A Worldwide Utility . Berchtesgaden, Germania: Universitat der Bunderswehr Munchen. Eissfeller, B. (2011, Mai 23-25). Inertial Sensors. First GNSS PhD Training 2011 . Munchen,
Germania: Universitat der Bunderswhr Munchen. Eissfeller, B. (2011, Mai 23-25). Introduction to Inertial Navigation. First GNSS PhD Training .
Munchen: Universitat der Bunderswhr Munchen. Fischer, R. A. (1922). On the mathematical foundations of theoretical statistics. Fotescu, N. (1975). Teoria erorilor si metoda celor mai mici patrate. Bucuresti: ICB. Fuller, A. (2012). Terrasolid - Download Section. Retrieved 04 23, 2014, from
https://www.terrasolid.com/download/presentations/2012/3DLM%20Terrasolid%202012.pdf Gauss, C. F. (1809). Teoria mișcării corpurilor cerești. Hamburg. Gleason, S., & Gebre-Egziahbher, D. (2009). GNSS Applications and Methods. Norwood,
Massachusetts: Artech House. Gordon, G. (1959). The LASER, Light Amplification by Stimulated Emission of Radiation. The Ann
Arbor Conference on Optical Pumping (p. 128). Michigan: Universiity of Michigan.

Bibliografie
31 Drd. ing.Vlad Gabriel OLTEANU
Groves, P. (2008). Principles of GNSS, Inertial and Multisensor Integrated Navigation Systems. Boston-London: Artech House.
Hampel, F. (1971). A general qualitative definition of robustness. Annals of Mathematical Statistics 42 , pp. 1887-896.
Hampel, F. (1986). Robust statistics. In F. Hampel, E. Ronchetti, & P. Rousseeuw, Robust statistics: the approach based on influence functions. Wiley, New York: John Wiley & Sons Inc.
Hofmann-Wellenhof, B., Lichtenegger, H., & Collins, J. (2001). GPS Theory and Practice. Wien-New York: Springer.
Huber, P. J. (1964). Robust estimation of a location parameter. Annals Mathematical Statistics , pp. 73-101.
Hulsmeyer, C. (1904). The Telemobiloscope. Electrical Magazine (London), Vol. 2 , 388. IEEE Sensors Working Group. (2007). 528-2001 IEEE Standard for Inertial Sensor Terminology. IEEE
Standards Association. Iglewicz, B., & Hoaglin, D. (1993). How to detect and handle outliers. Milwakee: ASQC Quality Press. Jager, R., Muller, T., & Saler, H. (2005). Klassiche und robuste Ausgleichungsverfahren. Wichman:
Munchen. Kalman, R. E. (1960). A New Approach to Linear Filtering and Prediction Problems. Journal of Basic
Engineering 82 , 35-45. Kanani, E. (2000). Robust Estimators for Geodetic Transformations and GIS. Zurich: Institut fur
Geodasie and Photogrammetrie. Koch, K.-R. (1999). Parameter Estimation and Hypothesis Testing in Linear Models. Berlin-New York:
Springer. Kremer, J., & Hunter, G. (2007). Performance of the StreetMapper Mobile LIDAR Mapping System in
Real World Projects. In D. Frisch, Photogrammetric Week 2007 (pp. 215-225). Wichmann Herbert. Leica Geosystems. (2014). Présentation Scanner laser dynamique (Mobile Mapping). Retrieved 04 27,
2014, from http://www.leica-geosystems.fr/fr/Evenements_19480.htm?id=9981 Lewin, W. (1999, 10 29). MIT Open courseware: Angular Momentum. Retrieved 05 11, 2014, from
http://ocw.mit.edu/courses/physics/8-01-physics-i-classical-mechanics-fall-1999/video-lectures/lecture-20/ Markets and Markets. (2013). LiDAR Market by Components (INS, Laser, GPS/GNSS, Camera,
MEMS), Product Types (Airborne, Mobile, Terrestrial), Applications (Corridor Mapping, Forestry, Mining, Topographic Surveying, Volumetric Mapping) - Global Forecasts and Analysis 2013 – 2018. Dallas, TX: Markets and Markets.
Markov, A. (1912). Calculus of probabilities. Leipzig. Martinez Morera, D., & Estrada Sarlabous, J. (2003). On the distance from a point to a quadric surface.
Revista investigacion operational , 24 (2), pp. 153-161. MDL part of Reinshaw plc. (n.d.). Dynascan S250 X-Plane Survey Grade Mobile Mapping System.
Retrieved 04 27, 2014, from Dynascan S250 X-Plane Survey Grade Mobile Mapping System: http://www.mdl-laser.com/en/dynascan-s250-x-plane-survey-grade-mobile-mapping-system--18372
Moldoveanu, C. (2002). Geodezie. Bucuresti: Matrix Rom.

Bibliografie
32 Drd. ing.Vlad Gabriel OLTEANU
Morgan, D. (2009). Using Mobile Lidar to Survey Railway Infrastructure. Lynx Mobile Mapper. FIG Commissions 5, 6 and SSGA Workshop - Innovative Technologies for an Efficient Geospatial Management of Earth Resources. Lake Baikal, Rusia: FIG.
Neuner, J. (2000). Sisteme de poziționare globală. București: Matrix ROM. Olteanu, V. (2007). Robust adjustment methods in parameter estimation for geometric forms in
industrial applications. Bucuresti: UTCB. Petrie, G., & Toth, C. (2009). Introduction to Laser Ranging, Profiling and Scanning. In J. Shan, & C.
Toth, Topographic Laser Ranging and Scanning - Principles and Applications (pp. 1-27). Boca Raton, FL: CRC Press.
Petrie, G., & Toth, C. (2009). Introduction to Laser Ranging, Profiling and Scanning. (J. S. Toth, Ed.) Boca Raton, FL: CRC Press Taylor & Francis Group.
Petrie, G., & Toth, C. (2009). Terrestrial Laser Scanners. Boca Raton, FL: CRC Press Taylor & Francis Group.
Pope, A. J. (1976). The statistics of residuals and the detecion of outliers. Rockville, Maryland: US Department of Commerce, National Geodetic Survey.
Riegl . (2007, 03 05). Long range 3D terrestrial laser scanner system LMZ-Z210ii. Datasheet . Horn, Austria: Riegl.
Riegl. (2014). Riegl - Mobile scanning Gallery. Retrieved 04 27, 2014, from Riegl: http://www.riegl.com/nc/products/mobile-scanning/gallery/
Riegl. (2014, 03). VMX-250 MARINE Datasheet. VMX-250 MARINE Datasheet . Horn, Austria: Riegl. Riegl. (2014, 03). VMX-450-RAIL Datasheet. VMX-450-RAIL Datasheet . Horn, Austria: Riegl. Ristic, B., Arulampalam, S., & Gordon, N. (2004). Beyond the Kalman Filter: Particle filters for
tracking applications. Boston: Artech House. Rousseeuw, P. (1984). Least median of squares regression. American Statistical Association , pp. 871-
880. S.C. Primul Meridian S.R.L. (2013). Primul Meridian. Retrieved 05 10, 2014, from primulmeridian.ro:
http://primulmeridian.ro/articole/sistem-mobil-de-scanare-terestra-riegl-vmx-250-113 Sanz Subirana, J., Juan Jornoza, J., & Hernandez-Pajares, M. (2013). GNSS Data Processing - Volume
I: Fundamentals and Algorithms. Noordwijk, Olanda: ESA. Sanz Subirana, J., Juan Zornoza, J., & Hernandez-Pajares, M. (2011). Conventional Terrestrial
Reference System. Retrieved 07 04, 2011, from Navipedia: http://www.navipedia.net/index.php/Conventional_Terrestrial_Reference_System
Savu, A. (2010). Perfectionari ale lucrarilor topografice si geodezice in domeniul cailor de comunicatii. Bucuresti: Universitatea Tehnica de Constructii Bucuresti.
Serra, A., Baron, A., Bosch, E., Alamus, R., Kornus, W., Ruiz, A., et al. (2005). Geomobil: Integration y experiencias de Lidar Terrestre en LB-MMS. Setmana Geomatica 2005. Barcelona: ISPRS.
Stengel, R. (1994). Optimal Control and Estimation. New York: Dover Publications. Talaya, J., Alamus, R., Bosch, E., Serra, A., Kornus, W., & Baron, A. (2004). Integration of a
Terrestrial Laser Scanner with GPS/IMU Orientation Sensors. Proceedings of the XX Congress of the ISPRS. ISPRS.

Bibliografie
33 Drd. ing.Vlad Gabriel OLTEANU
Taubin, G. (1994, Ianuarie). Distance Approximations for Rasterizing Implicit Curves. ACM TransactIons on Graphics , pp. 3-42.
Teunissen, P. J. (1985). The geometry of geodetic inverse linear mapping and non-linear adjustment. Delft: Netherlands Geodetic Commision.
Titterton, D., & Wetson, J. (2004). Strapdown Inertial Navigation Technology 2nd Edition. Reston, VA: American Institute of Aeronautics and Astronautics.
Topcon Corporation. (2010, 07). Topcon IP-S2 Datasheet. Topcon IP-S2 Datasheet . Topcon Corporation.
Trimble. (2013). Trimble MX8 Datasheet. Trimble MX8 Datasheet . Trimble. Ussyshkin, V. (2009). Mobile Laser Scanning Technology for Surveying Application: From Data
Collection to End-Products. FIG Working Week. Eilat, Israel: FIG. Wehr, A. (2009). LiDAR Systems and Calibration. Boca Raton, FL: CRC Press, Taylor & Francis
Group. Weisberg, S., & Atkinson, A. (1991). Simulated annealing for the detection of multiple outliers using
least squares and LMS fitting. New York: Springer-Verlag. Weisstein, E. (2007). Quadratic Surface. Retrieved 12 18, 2013, from MathWorld - A Wolfram Web
Resource: http://mathworld.wolfram.com/QuadraticSurface.html Wicki, F. (2001). Robust estimator for the adjustment of Geodetic Network. First International
Symposium on Robust Statistics and Fuzzy Techniques in Geodesy and GIS (pp. 53-60). Zurich: Institute of Geodesy and Photogrammetry.
Wicki, F. (1999). Robuste Schatzwerfahren fur die Parameterschatzung in geodatischen Netzen. Zurich: Institute for Geodesy and Photogrammetry.
Wikipedia. (2014, martie 30). Lidar - Wikipedia. Retrieved aprilie 1, 2014, from Wikipedia, The Free Encyclopedia : http://en.wikipedia.org/wiki/Lidar
Wikipedia. (2014, martie 15). USS Nautilus (SSN-571). Retrieved aprilie 2, 2014, from Wikipedia, The Free Encyclopedia: http://en.wikipedia.org/wiki/USS_Nautilus_(SSN-571)
Wolf, H. (1978). Das geodatische Gauss Helmert Modell und seine Eigenschaften. Z Vermessungswesen , 103:41-43.
Wrigley, W. (1977). The history of inertial navigation. Journal of Navigation , 61-68. Zarchan, P., & Musoff, H. (2009). Fundamentals of Kalman Filtering: A practical approach (Third
Edition). Reston, Virgina, USA: American Institute of Aeronautics and Astronautics, Inc. . Zeiss, G. (2014, Februarie 20). Report predicts that low cost LiDAR will be disruptive in next 5 years.
Retrieved Aprilie 1, 2014, from geospatial.blogs.com: http://geospatial.blogs.com/geospatial/2014/02/report-predicts-that-low-cost-handheld-lidar-will-be-disruptive-in-next-5-years.html