Mulţumesc domnului Conf. Dr. Vasile Dorobanţu …fiz.upt.ro/articole/1751374153carte1.pdf3...
58
3 Mulţumiri Mulţumesc domnului Conf. Dr. Vasile Dorobanţu pentru atenta citire şi corectare a scăpărilor ce au apărut la redactare. Mulţumesc domnului Conf. Dr. Duşan Popov pentru sugestiile privitoare la evidenţierea unor expresii semnificative şi modal itatea de editare.
Transcript of Mulţumesc domnului Conf. Dr. Vasile Dorobanţu …fiz.upt.ro/articole/1751374153carte1.pdf3...
3
Mulţumiri
Mulţumesc domnului Conf. Dr. Vasile Dorobanţu pentru atenta citire
şi corectare a scăpărilor ce au apărut la redactare.
Mulţumesc domnului Conf. Dr. Duşan Popov pentru sugestiile
privitoare la evidenţierea unor expresii semnificative şi modalitatea de editare.
4
Prefaţă
Prezenta carte poate fi considerată ca un “curs scurt” de Fizică, curs
care propune o abordare, de altfel, obişnuită a domeniului de înţelegere a
elementelor fundamentale ale unei părţi a Fizicii. Astfel, se prezintă elementele
esenţiale de Mecanică Clasică, Oscilaţii, Unde elastice, Teoria Relativităţii şi
Termodinamică, noţiuni care sunt apoi folosite în rezolvarea problemelor.
În ceea ce priveşte problemele, adică acea metodă constatativă de
înţelegere a fenomenelor fizice, unele, fiind considerate ca probleme tip, sunt
rezolvate, iar altele propuse spre rezolvare.
Sper ca demersul meu să constituie un factor educativ important în
ceea ce priveşte Fizica.
Autorul
5
CUPRINS
1. OPERAŢII CU VECTORI ......................................................... 6
2. MECANICĂ CLASICĂ .............................................................. 8
2.1 ELEMENTE DE DINAMICĂ .......................................................... 8
2.2 OSCILAŢII MECANICE .............................................................. 27
2.3 UNDE ELASTICE ....................................................................... 36
3. TEORIA RELATIVITĂŢII (RELATIVITATE
RESTRÂNSĂ) ................................................................................ 40
4. TERMODINAMICĂ ................................................................. 46
4.1 PRINCIPIUL I AL TERMODINAMICII ........................................... 47
4.2 PRINCIPIUL II AL TERMODINAMICII ......................................... 53
BIBLIOGRAFIE ........................................................................... 60

6
1. Operaţii cu vectori
Într-un sistem cartezian de coordonate în care versorii kji
,, definesc
sistemul ortogonal drept, un vector a
se scrie a
kajaia zyx
, unde
zyx aaa ,, sunt componentele vectorului a
pe axele de coordonate. Modulul
vectorului:
222
zyx aaaa
.
Exemplu: kzjyixr
; 222 zyxrr
.
Produsul scalar a doi vectori: bababa
,cos , sau folosind
componentele vectorilor pe axele de coordonate:
zzyyxx babababa
.
Observaţie: Dacă doi vectori sunt perpendiculari 0ba
; (exemplu
0 ji
, 0 ki
, 0 kj
);
Dacă doi vectori sunt paraleli baba
; (exemplu 1 ii
,
1 jj
, 1 kk
).
Exemplu: đ rdFL
- lucrul mecanic elementar.
Produsul vectorial a doi vectori bac
este vectorul normal la planul
determinat de a
şi b
, al cărui sens se determină cu regula burghiului drept.
Modulul său este: bababa
,sin . Folosind componentele vectorilor
produsul vectorial este:

7
zyx
zyx
bbb
aaa
kji
ba
.
Observaţie: Dacă doi vectori sunt paraleli 0ba
; (exemplu 0 ii
,
0 jj
, 0 kk
);
Dacă doi vectori sunt perpendiculari baba
; (exemplu
1 ji
şi kji
).
Exemplu: prJ
- momentul cinetic.
1. Fie .32 kjia
Să se determine:
a) modulul vectorului a
;
b) modulul proiecţiei vectorului a
pe planul XOY;
c) produsul scalar al vectorului a
cu vectorul kb
3 ;
d) produsul vectorial al vectorului a
cu vectorul kb
2 .
R: a) 14 ; b) 13 ; c) 3; d) ji
46 .
2. Fiind daţi vectorii kjia
432 şi kjib
53 să se calculeze:
a) modulul fiecărui vector;
b) produsul scalar ba ;
c) suma şi diferenţa vectorială;
d) produsul vectorial ba
.
R: a) 35,29 ; b) -1; c) kji
25 , kji
94 ; d) )2(11 kji
.

8
2. Mecanică clasică
2.1 Elemente de dinamică
Poziţia unei particule la orice moment de timp t este specificată de
vectorul de poziţie )(tr
a cărui expresie reprezintă legea de mişcare:
ktzjtyitxtr
)()()()( .
Prin eliminarea timpului din ecuaţiile parametrice ale traiectoriei
x=x(t), y=y(t), z=z(t) se obţin ecuaţiile traiectoriei.
Vectorul viteză momentană este derivata vectorului de poziţie în
raport cu timpul, iar prin derivarea legii de mişcare se obţine legea vitezei:
dt
rd
v , kjik
dt
tdzj
dt
tdyi
dt
tdxt zyx
vvv
)()()(v .
Vectorul acceleraţie momentană este derivata întâi a vectorului viteză
în raport cu timpul, sau derivata a doua a vectorului de poziţie în raport cu
timpul:
2
2v
dt
rd
dt
da
, kajaiakdt
dj
dt
di
dt
dta zyx
zyx
vvv
.
Impulsul este: v mp .
Principiul fundamental al mecanicii: dt
;
Pentru masă constantă, principiul fundamental al mecanicii se scrie: amF .
Legea de mişcare, legea vitezei, acceleraţia ca funcţii de timp, ecuaţiile
traiectoriei descriu, ceea ce se numeşte, mişcarea unui mobil. Aceste relaţii nu
sunt independente. Cunoscându-se condiţiile iniţiale (poziţia şi viteza la
momentul iniţial), prin calcule matematice se obţine una din aceste legi din alta,
9
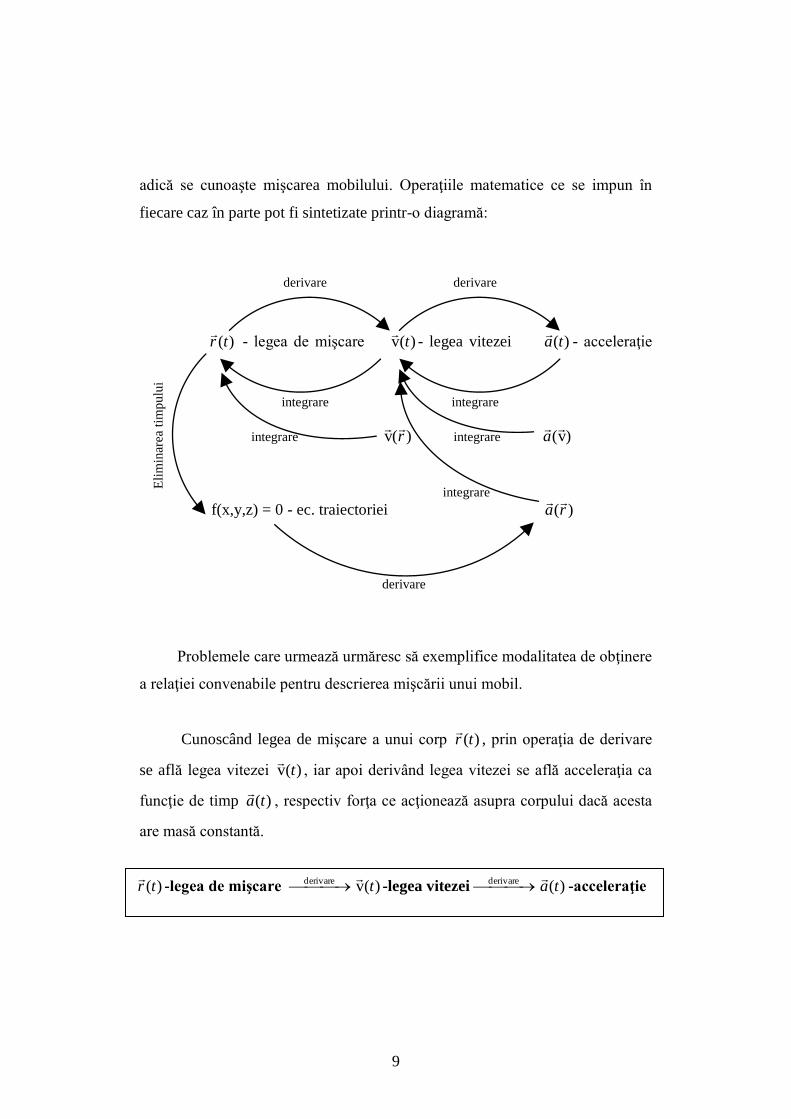
adică se cunoaşte mişcarea mobilului. Operaţiile matematice ce se impun în
fiecare caz în parte pot fi sintetizate printr-o diagramă:
)(tr
- legea de mişcare )(v t
- legea vitezei )(ta
- acceleraţie
integrare )(v r
integrare )v(
a
integrare
f(x,y,z) = 0 - ec. traiectoriei )(ra
derivare
Problemele care urmează urmăresc să exemplifice modalitatea de obţinere
a relaţiei convenabile pentru descrierea mişcării unui mobil.
Cunoscând legea de mişcare a unui corp )(tr
, prin operaţia de derivare
se află legea vitezei )(v t
, iar apoi derivând legea vitezei se află acceleraţia ca
funcţie de timp )(ta
, respectiv forţa ce acţionează asupra corpului dacă acesta
are masă constantă.
integrare integrare
derivare derivare
Eli
min
area
tim
pu
lui
)(tr
-legea de mişcare derivare)(v t
-legea vitezei derivare
)(ta
-acceleraţie

10
1. Aflaţi viteza şi acceleraţia punctelor materiale descrise de următorii
vectori de poziţie:
a) kjtitr
11157 2 (m);
b) kejtitr t 4123sin5 (m);
c) ktjttittr
ln5tan6sin 21
2 (m);
d) kejtitr t 722cos5 (m).
2. Ecuaţiile mişcării unui mobil sunt următoarele:
x = r cos ωt (m), y = r sin ωt (m), z = α t (m), unde r, ω, α sunt constante
pozitive. Să se afle:
a) vectorul viteză, modulul vitezei;
b) vectorul acceleraţie, modulul acceleraţiei.
R: a) 222v r
m/s; b) 2ra
m/s2.
3. O particulă de masă m se mişcă după legea:
x = α cos ωt (m), y = β sin ωt (m), unde α, β, ω sunt constante pozitive.
a) Precizaţi unităţile de măsură ale constantelor α, β şi ω;
b) Determinaţi forţa care acţionează asupra particulei în funcţie de poziţia
particulei.
R: .2rmF
4. Mişcarea unui punct material în planul xOy este descrisă de legea:
x = α sin ωt (m), y = α (1 - cos ωt) (m), unde α şi ω sunt constante pozitive.
Determinaţi unghiul dintre vectorul viteză şi vectorul acceleraţie al punctului
material.
R: π/2.

11
Din legea de mişcare )(tr
eliminând timpul se pot scrie ecuaţiile explicite
ale traiectoriei.
5. Vectorul de poziţie al unui punct material A variază după legea:
jtitr 2 (m), unde α, β sunt constante pozitive. Determinaţi:
a) ecuaţia traiectoriei punctului; reprezentaţi grafic;
b) vectorii viteză şi acceleraţie şi modulele acestora;
c) unghiul θ între vectorii acceleraţie şi viteză în funcţie de timp.
Rezolvare:
a) 2
2xy
- ecuaţia traiectoriei;
Traiectoria este o parabolă cu vârful V(0,0), iar punctul A se mişcă pe jumătate
din această parabolă ( x 0).
b) jti
2v , vectorul viteză este tangent la traiectorie în fiecare punct al
acesteia;
ja
2 , în acest caz vectorul acceleraţie este paralel cu direcţia axei Oy
şi în sens opus acesteia în fiecare punct al traiectoriei;
c) Unghiul pe care vectorul viteză îl face cu axa Oy este (π – θ),
t
tgy
x
2v
v
ttg
2
sau dacă se calculează cu ajutorul produsului scalar dintre vectorii a
şi v
:
2
2
2
4
cos
t
t
.
)(tr
- legea de mişcare pulelimin tim ec. traiectoriei

12
6. Mişcarea unei particule în plan este descrisă de legea:
x = β t (m), y = α t (1- β t) (m), unde α, β sunt constante pozitive. Determinaţi:
a) ecuaţia traiectoriei particulei; reprezentaţi grafic;
b) vectorii viteză şi acceleraţie şi modulele acestora;
c) momentul t0 la care vectorul viteză face un unghi de π/4 cu vectorul
acceleraţie.
R: a) xxy
2 ; c)
20
t .
7. Să se scrie ecuaţia traiectoriei, precizând forma acesteia pentru particula
care se mişcă după legea:
a) problemei 5;
b) problemei 6.
8. Două particule se deplasează cu vitezele ji
32v1 m/s, respectiv
ji
2v m/s. La momentul t0=0 particulele se găsesc în poziţiile
jir
210 m, respectiv jr
320 m. Să se determine momentul la care
distanţa dintre particule este minimă.
R: t = 0,6 s.
9. Două particule se deplasează cu vitezele jit
1v m/s, respectiv
jti
2v m/s. La momentul t0 =0 particulele se găsesc în poziţiile
ir
310 m, respectiv jr
320 m. Să se determine momentul la care distanţa
dintre particule este minimă.
Rezolvare:

13
dt
rd
v
t
t
dttrtr
0
)(v)( 10
,
jtit
tr
3
2)(
2
1 , jt
ittr
3
2)(
2
2 ,
jtt
itt
r
3
23
2
22
,
3
223
22
22
tt
tt
r
;
.minr
0
dt
rd
şi 02
2
dt
rd
;
t=1 s.
Operaţia inversă derivării fiind integrarea, din legea vitezei )(v t
se obţine
prin integrare legea de mişcare )(tr
. Cunoscându-se acceleraţia (sau forţa) ca
funcţie de viteză )v(
a (de obicei forţele rezistente depind de viteză), prin
integrare se poate afla legea vitezei )(v t
şi, mai departe, printr-o nouă integrare,
se poate descrie mişcarea prin legea de mişcare )(tr
.
10. Un corp de masă m porneşte la momentul t0 = 0 de la x0 = 0 cu viteza
v0 într-un mediu vîscos de-a lungul axei Ox. Corpul întâmpină din partea
mediului o forţă de rezistenţă proporţională cu viteza (F = - α v). Să se
determine:
a) legea vitezei;
)(tr
-legea de mişcare integrare
)(v t
-legea vitezei integrare
)v(
a -acceleraţie

14
b) legea de mişcare;
c) după cât timp viteza iniţială a corpului, v0, se micşorează de n ori.
Rezolvare:
a) amF
dt
dm
vv dt
dm
v
v
t
dtd
m0
v
v0v
v tm
0v
vln
m
t
et
0v)(v ;
b) dtedx
t
m
tx
0
0
0
v
1v
)( 0 m
t
em
tx
;
c) Se înlocuieşte v cu n
0v în legea vitezei şi se obţine: n
mt ln
.
11. Un corp de masă m întâmpină, din partea mediului în care se mişcă
de-a lungul axei Ox, o forţă de rezistenţă proporţională cu pătratul vitezei;
constanta de proporţionalitate este α (F = - α v2). Presupunând că la momentul
t0 = 0 corpul se găseşte la x0 = 0 şi are viteza v0 să se determine:
a) legea vitezei;
b) legea de mişcare;
c) după cât timp viteza iniţială a corpului, v0, se micşorează de n ori.
R: a)
0v
vm
t
mt
; b) 1v
ln 0 tm
mtx
; c) 1
v0
nm
t
.
12. Un corp de masă m, care se mişcă în lungul axei Ox, întâmpină din
partea mediului în care se mişcă o forţă de rezistenţă proporţională cu cubul

15
vitezei (F = - α v3). Presupunând că la momentul t0 = 0 corpul pleacă de la x0=0
şi are viteza v0 şi neglijând restul interacţiunilor, să se determine:
a) legea vitezei;
b) legea de mişcare;
c) după cât timp viteza iniţială a corpului, v0, se micşorează de n ori.
R: a)
tm
t2
v
1
1)(v
2
0
; b) 0
2
0v
2
v
1
mt
m
mtx ; c) 1
v2
2
2
0
nm
t
.
.
13. O particulă se mişcă încetinit în sensul pozitiv al axei Ox cu acceleraţia
va , unde α constantă pozitivă. Ştiind că la momentul t0 = 0, x0 = 0, iar
viteza este v0, determinaţi:
a) legea vitezei;
b) legea de mişcare;
c) drumul parcurs până la oprire şi intervalul de timp corespunzător.
R: a)
2
02
v)(v
tt
; b)
3
0
3
0 v2
v3
2)(
ttx
;
c)
0v2t , 2
3
0v3
2
x .
Cunoscându-se viteza ca funcţie de poziţie )(v r
, prin integrare se poate
afla legea de mişcare )(tr
şi, mai departe, se poate descrie mişcarea prin legea
dorită, folosind operaţiile matematice amintite mai sus.
trr integrarev

16
14. O particulă se deplasează în planul xOy cu viteza jxi
2v ,
unde α, β sunt constante. La momentul iniţial t0 = 0 particula se găseşte în
punctul x0 = y0 = 0. Determinaţi:
a) legea de mişcare;
b) legea vitezei;
c) ecuaţia traiectoriei;
d) acceleraţia.
R: a) jtittr 2)( .
15. O particulă de masă m se deplasează în sensul pozitiv al axei Ox cu o
viteză xv , unde α constantă pozitivă. Ştiind că la momentul t0 = 0
particula se găseşte în punctul x0 = 0 determinaţi:
a) legea de mişcare;
b) legea vitezei;
c) acceleraţia;
d) lucrul mecanic al tuturor forţelor ce acţionează asupra particulei în
primele t secunde ale mişcării.
R: a) 22
4)( ttx
; d) 2
4
8)( tmtL
.
16. Aceeaşi problemă pentru 3v x .
R: a) 2
3
3
2)(
ttx ; d) t
mtL
3)(
3 .

17
Atunci când se cunosc ecuaţiile traiectoriei, prin derivări succesive ale
acestora, şi folosind condiţiile iniţiale se poate deduce acceleraţia ca funcţie de
poziţie ra
.
17. O particulă de masă m se mişcă pe traiectoria 12
2
2
2
yx cu o
acceleraţie paralelă cu axa Oy. La t0 = 0 particula se găseşte în punctul de
coordonate x0 = 0, y0 = şi are viteza v0. Determinaţi forţa care acţionează
asupra particulei în fiecare punct al traiectoriei.
Rezolvare:
1)()(
2
2
2
2
tytx - ecuaţia traiectoriei;
Derivând ecuaţia traiectoriei în raport cu timpul se obţine:
022
22
dt
dyy
dt
dxx
sau 0
)(v)()(v)(22
ttyttx yx (1)
Condiţiile iniţiale:
t0 = 0, x0 = 0, y0 = , v0 ,
ay 0 , ax = 0 vx = const.
se înlocuiesc în (1) şi 0v0
y
v0y = 0 şi deci v0x = v0 vx = const = v0
Derivând (1) încă o dată în raport cu timpul şi utilizând, din nou, condiţiile
iniţiale, se obţine:
0vv
22
2
2
2
0
yy ay
ec. traiectoriei raderivare

18
Înlocuind vy din (1) şi folosind ecuaţia traiectoriei se obţine:
ay =
2
2
2
4
2
0
2
2
2
2
02
1vv
y
yy ay =
3
2
0
2
4 v
y
Astfel Fy = 3
2
0
2
4 v
y
m
, iar 0xF j
y
myF
3
2
0
2
4 v)(
.
18. O particulă se deplasează pe o traiectorie plană cu viteza constantă în
modul (v). Determinaţi acceleraţia particulei în punctul x0 = 0 pentru o
traiectorie descrisă de ecuaţia:
a) 2xy ;
b) xy .
Rezolvare:
a) 2xy .deriv vy = 2α x vx (1)
Dar vx2+ vy
2 = v
2 = const. vx
2 ( 1+4 α
2x
2 ) = v
2 (2)
.)2( deriv 22
22
41
v4
x
xa x
x
222
22
41
v4
x
xax
;
.)1( deriv ay = 2 α vx2+2 α x ax
222
2
41
v2
xa y
;
Pentru x0 = 0 y0 =0
0v
vv
0
0
y
x
2
0
0
v2
0
y
x
a
a;
b) R:
0
v2
0
2
0
y
x
a
a .
)(tr
-legea de mişcare integrare
)(v t
-legea vitezei integrare
)(ta
-acceleraţie
)(tF
-forţă

19
19. Un corp de masă m se află în repaus pe un plan orizontal. La momentul
t0 = 0 asupra lui începe să acţioneze o forţă dată de legea F = α t, unde α este o
constantă. Forţa face un unghi θ cu orizontala. Neglijînd frecarea să se
determine:
a) legea vitezei, până la părăsirea planului orizontal;
b) viteza v1 a corpului în momentul în care acesta părăseşte planul;
c) legea de mişcare, până la părăsirea planului;
d) drumul parcurs de corp din momentul iniţial până la părăsirea planului.
Rezolvare:
a) Până la părăsirea planului orizontal acceleraţia corpului este:
F cos θ = m a m
ta
cos ,
m
t
dt
d cosv egrareint 2
2
cosv t
m
;
b) În momentul desprinderii componenta verticală a forţei este egală cu
greutatea, astfel încât:
F sin θ =G α t1 sin θ = mg sin
1
mgt ,
2
2
1sin2
cosv
mg ;
c) R: 3
6
cos)( t
mtx
; d) R:
32
32
01sin6
cosgmxx .
20. Un corp de masă m se află în repaus pe un plan orizontal. La momentul
t0 = 0 asupra lui începe să acţioneze o forţă dată de legea F = α t , unde α este
o constantă. Forţa face un unghi θ cu orizontala. Neglijînd frecarea, să se
determine:

20
a) viteza v1 a corpului în momentul în care acesta părăseşte planul;
b) drumul parcurs de corp din momentul iniţial până la părăsirea planului.
R: a)
32
32
1sin3
cos2v
gm ; b)
54
54
01sin15
cos4 gmxx .
Energia
Lucrul mecanic elementar, respectiv lucrul mecanic total la trecerea
din starea 1 în starea 2 sunt:
đ rdFL
, rdFL
2
1
.
Observaţie: đL reprezintă lucrul mecanic elementar şi nu diferenţiala lucrului
mecanic.
Dacă forţa este constantă pe tot parcursul deplasării: rFL
.
dt
LdP - puterea mecanică; v
FP .
đL = dEc - teorema variaţiei energiei cinetice;
Lucrul mecanic al forţelor care derivă din potenţial este: đL= - dU, iar forţele
câmpului potenţial se exprimă:
UF
= - grad U,
unde U = U( x, y, z ) – potenţialul sau energia potenţială este funcţie de poziţie;
zk
yj
xi
- operatorul nabla.
E = Ec + U – energia totală.

21
21. Forţele constante kjiF
2321 (N) şi kjiF
532 (N)
acţionează simultan asupra unei particule în timpul deplasării acesteia din
punctul A(4, 7, 5) (m) în punctul B(9, 0, 8) (m). Care este lucrul mecanic
efectuat asupra particulei?
R: 30 J
22. O particulă se deplasează pe o traiectorie în planul xOy din punctul de
vector de poziţie jir
531 m, în punctul de vector de poziţie jir
42 m.
Ea se deplasează sub acţiunea unei forţe jiF
72 N. Calculaţi lucrul
mecanic efectuat de forţa F
.
R: - 40 J.
23. Un corp de masă m = 4 kg se mişcă după legea jtttr 33)( m. Să
se calculeze lucrul mecanic efectuat asupra corpului în intervalul de timp t0 = 0,
t1 = 2 s.
Rezolvare:
jtttr 33)( jt(t)
291v ,
jt(t)
18a , jt(t)
72F ;
v FP 29172 ttP ;
2
0
29172 dtttL 2736L J.

22
24. Un corp de masă m = 1 kg se mişcă după legea jtittr 32 2)( m. Să
se calculeze lucrul mecanic efectuat asupra corpului în intervalul de timp t0 = 0,
t1 = 1 s.
R: L = 20 J.
25. Asupra unui corp de masă m aflat pe un plan orizontal acţionează o
forţă constantă în modul F = mg/2. Pe parcursul deplasării forţa face cu
orizontala un unghi care variază după legea θ = α x, unde α este o constantă, iar
x este drumul parcurs (x0 = 0). Să se calculeze viteza v1 a corpului în momentul
în care unghiul θ = π/2.
Rezolvare:
F sin θ < G , pentru orice x pe tot parcursul deplasării corpul rămâne pe
planul orizontal;
Lucrul mecanic, al forţelor care acţionează asupra corpului, se reduce la lucrul
mecanic al componentei forţei F
de-a lungul planului orizontal :
xF
dxxFL
x
sincos0
;
Folosind teorema variaţiei energiei cinetice:
L = ∆Ec )(sin)(v xg
x
g1v .
Dacă se cunoaşte forţa, sau acceleraţia, ca funcţii de poziţie, legea vitezei
se poate obţine folosind teorema variaţiei energiei cinetice şi definiţia lucrului
mecanic, iar legea de mişcare rezultă prin integrarea legii vitezei. O altă

23
modalitate de a obţine legea de mişcare este rezolvarea ecuaţiei diferenţiale la
care conduce principiul fundamental al mecanicii.
26. Un corp de masă m se mişcă în lungul axei Ox sub acţiunea unei forţe
care variază după legea F = α x, unde α este o constantă pozitivă. Ştiind că, la
momentul t0 = 0, corpul se găseşte în x0 şi are viteza v0 = 0, să se determine:
a) legea de mişcare;
b) legea vitezei.
R: a) m
t
extx
0)( ; b) m
t
em
xt
0)(v .
27. Un corp de masă m se mişcă în lungul axei Ox sub acţiunea unei forţe
care variază după legea F = α x, unde α este o constantă pozitivă. Ştiind că, la
momentul t0 = 0, corpul se găseşte în x0 = 0 şi are viteza v0 , să se determine:
a) legea de mişcare;
b) legea vitezei.
Rezolvare:
a) Folosind teorema variaţiei energiei cinetice: L = ∆Ec şi definiţia lucrului
mecanic: dxxFL
x
0
,
se obţine lucrul mecanic 2
2xL
şi deci
22
0v)(v xm
x
;
Prin integrare se obţine legea de mişcare implicită:
)(tr
-legea de mişcare integrare
)(v t
-legea vitezei integrare
)(ra
-acceleraţie
)(rF
-forţă

24
mt
mxx
m
2
02
0
v
v
1ln ,
care, prin câteva artificii matematice duce la legea de mişcare explicită.
Dacă se abordează problema rezolvând ecuaţia diferenţială ce rezultă în urma
aplicării principiului fundamental al mecanicii:
02
2
xmdt
xd ,
atunci legea de mişcare rezultă în mod explicit şi este:
t
m
mtx
sinhv)( 0 ;
b) R:
t
mt
coshv)(v 0 .
28. Un corp de masă m este ridicat de la suprafaţa Pământului cu ajutorul
unei forţe care depinde de altitudinea y după legea jymgF
12 , unde α
este o constantă pozitivă. Calculaţi lucrul mecanic al acestei forţe şi variaţia
energiei potenţiale a corpului pe porţiunea y = 0, y = 1/2α.
R: 4
3mgL ;
2
mgU .
29. Un resort special are legea forţei F = - α x3. Care este energia
potenţială în punctul x, presupunând Ep = 0 la x0 = 0.
R: Ep = α x4 / 4.
30. Ştiind că potenţialul forţei este dat de expresia r
U
, unde α este o
constantă pozitivă, să se determine expresia forţei ce derivă din acesta.

25
Rezolvare:
UF
z
Uk
y
Uj
x
UiF
;
Pentru a lucra în coordonate carteziene se foloseşte expresia potenţialului
scrisă cu aceste coordonate:
21
222
),,(
zyx
zyxU
23
222 zyx
x
x
UFx
,
23
222 zyx
y
y
UFy
,
23
222 zyx
z
z
UFz
,
23
222 zyx
kzjyixF
rr
F
3
.
31. Potenţialul unui câmp are expresia rr
U
2
, unde α şi β sunt
constante pozitive, iar r este distanţa faţă de centrul câmpului. Să se determine:
a) expresia forţei ce derivă din acest potenţial;
b) valoarea maximă a forţei de atracţie pe care acest câmp o exercită
asupra unei particule.
R: a) rrr
F
34
2 ; b)
2
3
max27
F .

26
Momentul forţei şi momentul cinetic
FrM
- momentul forţei;
prJ
- momentul cinetic;
Mdt
Jd
- teorema mometului cinetic;
Pentru forţe centrale momentul forţei este nul în raport cu centrul câmpului şi
momentul cinetic se conservă.
32. O planetă de masă m evoluează în jurul Soarelui, de masă M, pe o
elipsă. Distanţa minimă (periheliu) şi maximă (afeliu) faţă de Soare este r1,
respectiv r2. Calculaţi momentul cinetic al acestei planete în raport cu centrul
Soarelui.
Rezolvare:
Forţa de interacţiune gravitaţională între planetă şi Soare este:
rr
mMKF
3
,
iar energia potenţială a planetei în câmpul gravitaţional al Soarelui este:
r
mMKE p ;
Mişcarea planetei fiind în câmp central, energia totală şi momentul cinetic se
conservă. În punctele în care distanţa planetei faţă de Soare este minimă,
respectiv maximă, aceste legi de conservare se scriu:
2
v
2
v 2
2
2
2
1
1
m
r
mMK
m
r
mMK ,
2211 vv mrmrJ .
Rezolvând sistemul format din aceste două ecuaţii care au necunoscutele v1 şi
v2 se obţine:

27
21
212
rr
rrKMmJ
.
33. Să se exprime, în funcţie de momentul cinetic J, energia cinetică,
energia potenţială şi energia totală a unui satelit de masă m pe o orbită circulară.
R: 2
2
2mr
JEc ;
2
2
mr
JE p ;
2
2
2mr
JE .
2.2 Oscilaţii mecanice
Oscilaţii armonice:
Un corp efectuează oscilaţii armonice atunci când asupra lui acţionează o forţă
de tip elastic:
F = - k x,
k –constanta elastică; x –elongaţie; m –masa;
m
k2
0 , ω0 – pulsaţie proprie; 0
0
2
T
, T0 –perioadă proprie;
x(t) = A sin (ω0 t + φ);
Oscilaţii amortizate:
Oscilaţiile unui corp sunt amortizate atunci cănd asupra lui acţionează, pe lângă
forţa de tip elastic (- k x) şi o forţă rezistentă proporţională cu viteza (– α v):
F = - k x – α v, α –coeficient de rezistenţă;
2m
, 22
0 , ω –pulsaţia oscilaţiei amortizate;
β –factor de amortizare;

28
Observaţie: Avem de-a face cu mişcare de oscilaţie numai dacă 22
0 .
x(t) = A e - β t
sin (ω t + φ);
T - decrement logaritmic;
T – perioada mişcării oscilatorii amortizate.
Oscilaţii forţate:
Forţa care întreţine oscilaţia este sinusoidală de amplitudine F0 şi pulsaţie ω1:
F = - k x – α v + F0 sin (ω1 t);
x(t) = A1 sin (ω1 t - φ1 ) ,
2
1
22
1
2
0
0
1
2
mF
A , 2
1
2
0
11
2
tg ;
A1 (ω1) = maximă ω1= ωrez =22
0 2 .
34. O particulă efectuează oscilaţii sinusoidale de-a lungul axei Ox în jurul
poziţiei de echilibru. Pulsaţia oscilaţiilor este ω = 5 rad/s. La momentul t0=0
particula se găseşte în poziţia x0 = 12 cm şi are viteza 0v =0,6 m/s. Determinaţi
legea de mişcare şi legea vitezei.
R:
45sin212)(
ttx cm;
45cos260v
πt,(t) m/s.
35. Determinaţi pulsaţia şi amplitudinea oscilaţiilor sinusoidale efectuate
de o particulă dacă la distanţele x1 şi x2 de la poziţia de echilibru viteza
particulei are valorile v1 şi v2.
R: 2
2
2
1
2
1
2
2 vv
xx
,
2
1
2
2
2
1
2
2
2
2
2
1
vv
vv
xxA .

29
36. Un corp de masă m = 0,05 kg fixat de capătul unui resort de constantă
elastică k = 20 N/m execută o mişcare oscilatorie armonică de-a lungul axei Ox.
Ştiind că la momentul t0 = 0 corpul are doar energie cinetică, iar energia
cinetică maximă a corpului este de 9·10 -3
J, să se determine:
a) legea de mişcare;
b) energia totală a corpului.
R: a) x(t) = 0,03 sin(20 t) m; b) Et = 9·10 -3
J.
37. Un corp de masă m = 0,05 kg fixat de capătul unui resort execută o
mişcare oscilatorie armonică de-a lungul axei Ox după legea:
)10(sin050 t , x(t) m. Să se determine:
a) constanta elastică a resortului şi perioada oscilaţiilor;
b) energia totală a corpului;
c) momentele de timp la care energia cinetică este egală cu energia
potenţială.
R: a) k = 5 N/m, 5
T s; b) Et = 6.25·10
-3 J; c)
4012
ntn s, unde
n=număr natural.
38. Un punct material efectuează o mişcare oscilatorie amortizată de-a
lungul axei Ox. Perioada mişcării este T=3 s, iar decrementul logaritmic δ=0,6.
Să se scrie legea de mişcare, ştiind că la momentul iniţial t0 = 0, x0 = 0, v0 = 0,5 m/s.
R:
tetx
t
3
2sin
4
3)( 5
.
39. Să se scrie expresia vitezei oscilaţiilor amortizate.
Rezolvare:

30
x(t) = A0 e - β t
sin (ω t + φ),
teteAt tt cossinv 0 ,
tteAt t sincosv 0 ;
tarctgtgteAt t sincosv 0 ,
arctgt
arctg
eAt
t
cos
cos
v 0 .
40. Un punct material execută oscilaţii amortizate cu pulsaţia ω. Să se
determine coeficientul de amortizare β dacă la momentul t0 = 0 viteza punctului
material este nulă, iar elongaţia este de n ori mai mică decât amplitudinea.
R: 12 n .
41. Un corp oscilează într-un mediu cu decrementul logaritmic δ1. Care
este decrementul logaritmic δ2 dacă coeficientul de rezistenţă al mediului creşte
de n ori?
Rezolvare:
12 n 12 n ;
2 T ,
22
0 ,
2
22
0
22
0
4
;
22
1
01
22
2
02
44
n,

31
114
2
2
2
1
12
n
n
.
42. Un corp oscilează într-un mediu cu decrementul logaritmic δ1. De câte
ori trebuie să crească rezistenţa mediului pentru ca oscilaţia amortizată să
devină mişcare amortizată aperiodică (β2 = ω0).
R: 12
2
1
n .
43. Un corp de masă m=250 g execută o mişcare de oscilaţie amortizată cu
factorul de amortizare β = π/4 s – 1
, perioada oscilaţiilor proprii fiind 320 T s.
Oscilaţiile corpului devin forţate în urma acţiunii unei forţe exterioare periodice
)2(sin1,0 tF N. Să se scrie elongaţia oscilaţiilor forţate.
R:
42sin
22,02
ttx m.
44. Amplitudinea oscilaţiilor forţate este aceeaşi pentru două frecvenţe ν1
şi ν2. Să se afle frecvenţa de rezonanţă a oscilaţiilor.
R: 2
2
2
2
1
rez .
45. Asupra unui corp, care efectuează o mişcare oscilatorie amortizată cu
perioada oscilaţiilor proprii T0, acţionează o forţă exterioară sinusoidală de
amplitudine F0. La rezonanţa vitezelor, amplitudinea oscilaţiilor este A0. Să se
afle coeficientul de rezistenţă.
Rezolvare:

32
x(t)=A1 sin (ω1 t - φ1 ) - legea de oscilaţie în cazul oscilaţiilor forţate;
2
1
22
1
2
0
0
1
2
mF
A ,
v(t)=A1 ω1 cos (ω1 t - φ1 )
Rezonanţa vitezelor se realizează atunci când :
ω1 A1= maximă
0
22
1
22
1
2
0
01
1
mF
d
d ω1 = ω0
0
0
02 m
FA ;
Dar 0
0
2
T
, iar
2
m
0
00
2 A
TF
.
46. Un corp care efectuează o mişcare oscilatorie forţată are amplitudinea
vitezei egală cu 1/3 din amplitudinea vitezei la rezonanţa vitezelor, pentru două
pulsaţii ω1 şi ω2. Să se afle:
a) pulsaţia proprie a oscilatorului ω0;
b) factorul de amortizare β.
R: a) 210 ; b) 24
12
.
Compunerea oscilaţiilor armonice paralele
a) Oscilaţii cu aceeaşi pulsaţie
x1 (t) = A1 sin (ω t + φ1),
x2 (t) = A2 sin (ω t + φ2);
Rezultatul compunerii a două oscilaţii armonice paralele de aceeaşi
pulsaţie este tot o oscilaţie armonică de aceeaşi pulsaţie pe aceeaşi direcţie.

33
x (t) = x1 (t) + x2 (t) x (t) = A sin (ω t + φ)
1221
2
2
2
1 cos2 AAAAA , 2211
2211
coscos
sinsin
AA
AAtg
.
b) Oscilaţii cu pulsaţii puţin diferite
Rezultatul compunerii a două oscilaţii armonice paralele de pulsaţii
diferite nu mai este o oscilaţie armonică.
x1 (t) = A sin (ω1 t + φ1),
x2 (t) = A sin (ω2 t + φ2),
x (t) = x1 (t) + x2 (t) ;
Dacă pulsaţiile sunt foarte apropiate între ele, iar amplitudinile
oscilaţiilor care se compun sunt egale, oscilaţia rezultantă este aproape
sinusoidală:
22sin
22cos2 12121212
ttAtx .
În cazul frecvenţelor acustice sunetul de pulsaţie 2
12 se aude succesiv,
întărindu-se şi slăbindu-se cu pulsaţia şi perioada bătăilor: 12
2
bT .
Compunerea oscilaţiilor armonice perpendiculare
a) Oscilaţii cu aceeaşi pulsaţie
x (t) = A1 sin (ω t + φ1),
y (t) = A2 sin (ω t + φ2);

34
Traiectoria unui punct material supus simultan la două oscilaţii armonice
perpendiculare de aceeaşi pulsaţie este o elipsă a cărei formă depinde de
12 :
12
2
12
21
2
2
2
2
1
2
sincos2
AA
xy
A
y
A
x .
b) Oscilaţii cu pulsaţii diferite
Un punct material supus simultan la două oscilaţii armonice
perpendiculare de pulsaţii diferite are o traiectorie complicată. Dacă raportul
pulsaţiilor este un număr raţional traiectoria este una din figurile Lissajous,
forma traiectoriei depinzând şi de diferenţa de fază 12 .
47. Un punct material este supus simultan la două mişcări oscilatorii
armonice descrise de legile:
x1 (t) = 1,2 sin
3
2 t
7
2 m, respectiv x2 (t) = 1,6 sin
6 t
7
2 m.
Să se scrie legea de mişcare rezultantă.
R: x (t) = 2 sin (7
2 t + 0,37 π) m.
48. Un punct material este supus simultan la două mişcări oscilatorii
armonice descrise de legile:
a)
35sin5
ttx m,
3
2
5sin4
tty m;

35
b)
14
9sin2
ttx m,
7sin5
tty m;
c)
63
2sin3
ttx m,
3
2
3
2sin3
tty m.
Să se determine ecuaţia traiectoriei punctului material, precizându-se forma
acesteia.
R: a) xy5
4 , traiectoria este o dreaptă; b) 1
254
22
yx
, traiectoria este o
elipsă având drept axe chiar axele de coordonate; c) 922 yx , traiectoria
este un cerc.
49. Să se determine ecuaţia traiectoriei unui punct material supus simultan
la două mişcări oscilatorii:
a) x (t) = A sin (ω t), y (t) = A sin (2ω t);
b) x (t) = A sin (ω t), y (t) = A cos (2ω t).
Rezolvare:
a) x = A sin (ω t) A
xt sin ;
y = Asin(2ωt) y = 2A sin (ω t) cos (ω t),
ttAy 2222 sin1sin4
2
222 14
A
xxy - traiectoria este una din figurile
Lissajous:
36
b) Cele două oscilaţii care se compun au acelaşi raport al pulsaţiilor ca şi la
punctul a), dar defazajul este altul şi deci forma traiectoriei este alta.
2
221
A
xAy .
2.3 Unde elastice
Mediile continue (gazele, lichidele, solidele) sunt medii de particule care
interacţionează între ele şi care, dacă una din particule oscilează, vor propaga
oscilaţia de la particulă la particulă sub formă de unde, numite unde elastice.
Mediile de acest fel se numesc medii elastice.
Atunci când oscilaţiile în fiecare punct sunt armonice de o anumită frecvenţă,
2 ( -pulsaţia), unda este o undă monocromatică ce se propagă fără
atenuare.
xktAtx sin),( 0 - elongaţia în cazul undei plane monocromatice care
se propagă (fără atenuare) pe direcţia axei Ox;
A0 – amplitudinea, care este constantă pentru unda plană; x – distanţa faţă de
sursă;
k – număr de undă, adică numărul de unde, de lungime de undă λ, care se
cuprind în 2π unităţi de lungime.
Elongaţia ψ este periodică în timp, cu perioada T, şi periodică în spaţiu (în
raport cu coordonata x), cu perioada λ:

37
2k ,
T
2 , Tu ,
u –viteza de propagare a undei sau viteza de fază;
xkt - faza undei care se propagă pe direcţia axei Ox;
Suprafeţele de undă sunt suprafeţe de fază constantă. Viteza de deplasare a fazei
se numeşte viteză de fază.
01
2
2
22
2
tux
- ecuaţia diferenţială a undelor care se propagă pe
direcţia axei Ox;
rktAtr
sin),( 0 - elongaţia în cazul undei plane monocromatice care
se propagă în spaţiu (fără atenuare) în direcţia şi sensul lui k
;
k
-vector de undă care are modulul
2k şi este orientat în direcţia şi sensul
de propagare a undei.
rktr
Atr sin),( 0
- elongaţia în cazul undei sferice monocromatice;
Observaţie: În cazul undei sferice amplitudinea de oscilaţie a punctelor
mediului depinde de distanţa faţă de sursă : r
ArA 0 , unde A0 este constantă.
01
2
2
2
tu
- ecuaţia diferenţială a undelor care se propagă în spaţiu,
2
2
2
2
2
2
zyx
- operatorul lui Laplace (laplacean).
38
50. Într-un mediu elastic se propagă, de-a lungul axei Ox, undele
longitudinale descrise de legea: xttx 2,0100sin103),( 3 m. Să se
determine:
a) frecvenţa oscilaţiilor punctelor mediului elastic;
b) viteza maximă de oscilaţie a punctelor mediului elastic;
c) viteza de propagare a undei.
R: a) ν = 50 Hz, b) t
txoscil
),(v .
, vmax.= 0,3π m/s, c) u = 500π m/s.
51. O undă plană sonoră se propagă de-a lungul axei Ox după legea:
xttx 41360sin108, 5 m. Să se determine:
a) raportul dintre amplitudinea de vibraţie a particulelor mediului şi
lungimea de undă;
b) raportul dintre amplitudinea vitezei de vibraţie a particulelor mediului
şi viteza de propagare a undei.
R: a) 51009,5
A; b) 4max 102,3
v u
.
52. O sursă de oscilaţii armonice oscilează după legea:
tty 750sin03,0 m. Pentru unda plană care se propagă în lungul axei Ox,
să se determine deplasarea faţă de poziţia de echilibru a unui punct aflat la
distanţa de x1 = 25 cm faţă de sursa de oscilaţii la t1 =0,04 s după începerea
oscilaţiei. Viteza cu care se propagă oscilaţiile este de 250 m/s.
R: 25,1, 11 tx cm.
53. Să se determine raportul amplitudinilor şi defazajul dintre oscilaţiile a
două puncte aflate la 10 m, respectiv 16 m faţă de o sursă punctiformă de

39
oscilaţii, ştiind că perioada oscilaţiilor este de 0,08 s, iar viteza de propagare a
undei sferice este de 300 m/s.
R: 6,11
2
2
1 r
r
A
A;
2
212
rr
uT.
54. Să se determine, în cazul undei plane, elongaţia unui punct aflat la
distanţa de λ/4 faţă de sursa de oscilaţii pentru momentul T/3. Amplitudinea
oscilaţiilor este de 7 cm.
R: 3,5 cm.
55. Pentru o undă plană, la momentul T/3, distanţa faţă de poziţia de
echilibru a unui punct aflat la 5 cm faţă de sursa de oscilaţii este de 23 din
amplitudine. Să se determine lungimea de undă.
R: 30 cm.
56. O undă plană descrisă de legea xktAetx x sin, , unde A,
γ, ω şi k sunt constante, se propagă într-un mediu omogen. Să se calculeze
defazajul dintre punctele în care amplitudinile diferă de n=2,5 ori, ştiind γ =0,458 m– 1
şi λ = 50 cm.
R:
8ln
2 n .
57. O sursă punctiformă produce oscilaţii sonore de frecvenţă ν=1,4 kHz.
Unda sferică propagându-se cu atenuare, la distanţa r1 =3 m de la sursă
amplitudinea de oscilaţie a particulelor mediului este A1 = 30 μm, iar la
distanţa r2 = 8 m amplitudinea este de n = 4 ori mai mică. Să se determine:
a) coeficientul γ de amortizare al undei;

40
b) viteza maximă de oscilaţie a particulelor mediului la distanţa r2.
Rezolvare:
a) rktr
Aetr
r
sin, r
AerA
r
;
21 AnA 21
21
r
en
r
err
081,0ln1
2
1
12
r
nr
rr m
– 1;
b) t
trosc
),(v
r
eA r
maxv ;
La distanţa r2 de sursa de oscilaţii n
AA 1
2 066,02v 1max
n
A m/s.
3. Teoria Relativităţii (Relativitate restrânsă)
Sistemul de referinţă S’ se mişcă cu viteza u (comparabilă cu viteza
luminii c) relativ la sistemul de referinţă S în direcţia axei comune Ox.
Observaţie: Sistemul de referinţă S’ este de obicei sistemul propriu al
particulei care se mişcă cu viteză comparabilă cu viteza luminii, iar S este
sistemul de referinţă al laboratorului.
Transformările Lorentz
Transformările lui Galilei – Newton, valabile în Mecanica Clasică, sunt
înlocuite în Teoria Relativităţii Restrânse de transformările Lorentz:

41
2
2
1
'
c
u
tuxx
, yy ' , zz ' ,
2
2
2
1
'
c
u
xc
ut
t
.
Observaţie: Se foloseşte adesea notaţia c
u , adică β este viteza măsurată în
sistemul natural de unităţi, în care c = 1.
Dilatarea timpului
Măsurând intervalul de timp cât durează un proces fizic în sistemul de referinţă
al laboratorului, cu un ceas aflat în repaus faţă de laborator, se obţine o valoare
mai mare decât atunci când măsurarea are loc în sistemul de referinţă propriu,
aflat în mişcare cu viteza u faţă de sistemul de referinţă al laboratorului.
2
2
1
'
c
u
tt
.
Contracţia lungimii
Măsurând lungimea, de-a lungul direcţiei de mişcare, a unui obiect în sistemul
de referinţă al laboratorului, se obţine o valoare mai mică decât atunci când
măsurarea lungimii, tot de-a lungul direcţiei de mişcare, se face în sistemul de
referinţă propriu aflat în mişcare cu viteza u, şi faţă de care obiectul este în
repaus.
2
2
0 1c
ull .
Compunerea vitezelor
Pentru o particulă care se mişcă în sistemul de referinţă S cu viteza v
de
componente zyx v,v,v , viteza în sistemul de referinţă S’ are componentele:

42
x
xx
c
u
u
v1
v'v
2
,
2
2
2
1
v1
v'v
c
u
c
ux
y
y
, 2
2
2
1
v1
v'v
c
u
c
ux
zz
,
componente ce rezultă din transformările Lorentz.
Observaţie: În cazul în care cu formulele relativiste de compunere a
vitezelor se reduc la formulele clasice (newtoniene).
Masa de mişcare (relativistă):
2
2
0
1c
u
mm
, 0m - masa de repaus;
Observaţie: Semnificaţie fizică are m0 – masa de repaus.
Energia totală: 2cmE ;
Energia de repaus: 2
00 cmE ;
Energia cinetică: 2
0
2 cmcmEc .
1. Cu ce viteză se mişcă o riglă, poziţionată paralel cu direcţia de mişcare,
a cărei lungime este de 2 m în sistemul de referinţă propriu, dacă lungimea
observată din sistemul laboratorului este de 1 m.
R: 8
2
0
2
106,21 l
lcu m/s.

43
2. Fie un cerc, de rază b, în mişcare cu viteza u relativistă. Să se calculeze
β (c
u ), atunci când cercul este văzut din sistemul laboratorului ca o elipsă
cu axa mică 2a, iar cea mare 2b (a < b).
Rezolvare:
Pe direcţia mişcării diametrul propriu 2b devine, în sistemul de referinţă al
laboratorului, 2a (a < b) în conformitate cu:
2
2
122c
uba
2
2
2
2
1c
u
b
a ,
2
2
1b
a
c
u .
3. Timpul de viaţă propriu al unei particule instabile este 120 ns. Să se
calculeze distanţa parcursă de particulă înainte de dezintegrare în sistemul de
referinţă al laboratorului în care durata sa de viaţă este 18 ns.
R: 412
2
0
cs m.
4. Un sistem de referinţă S’ se mişcă cu viteza u =0,8 c în raport cu un
sistem de referinţă S în direcţia xx’. În sistemul S al laboratorului o particulă se
mişcă cu viteza jcic
2
3
2
1v . Să se exprime viteza particulei în sistemul
de referinţă S’.
R: cx2
1'v , cy
2
3'v v’ = v =c, dar v
şi 'v
au direcţii diferite.

44
5. Fie două sisteme de referinţă S şi S’, unde S’ se mişcă cu viteza u = c (1 – δ)
relativ la S în direcţia xx’. Să se afle viteza unei particule în sistemul S al
laboratorului, ştiind că particula se mişcă cu viteza vx’ = c ( 1 – δ) în sistemul
S’ (δ<<1).
Rezolvare:
x
xx
c
u
u
v1
v'v
2
x
xx
c
u
u
'v1
'vv
2
,
2
1
121
v2
2
c
cx .
6. Un sistem de referinţă S’ se mişcă cu viteza u =2c/3 relativ la sistemul
de referinţă S în direcţia xx’. Să se afle viteza unei particule în sistemul S al
laboratorului, ştiind că particula se mişcă cu viteza vx’ = 2c/3 în S’, pe aceeaşi
direcţie şi în acelaşi sens cu u. Care ar fi valoarea vitezei particulei în sistemul
laboratorului dacă vitezele s-ar compune clasic şi ce contradicţie ar rezulta?
R: cx13
12v ; Clasic: ccx
3
4v , viteza ar fi mai mare decât viteza luminii,
în contradicţie cu experienţa.
7. Asupra unei particule cu masa de repaus m0 acţionează o forţă constantă
F. Considerând că particula porneşte la t0 =0 din repaus din x0 =0, să se
exprime, relativist, viteza şi coordonata în funcţie de timp.
Rezolvare:
dt
dpF
tp
Fdtdp00
tFp ;

45
Dar p = mv, iar
2
2
0
v1
c
mm
22
0
22v
cmtF
tcFt
;
dt
dxv
tp
Fdtdp00
,
cmcmtFF
ctx 0
22
0
22)( .
8. Să se exprime impulsul relativist în funcţie de energia totală a unei
particule.
R: 42
0
21cmE
cp .
9. Să se exprime impulsul relativist în funcţie de energia cinetică a unei
particule.
R: 2
0
22
1cmEE
cp cc .
10. Care este corecţia de ordinul întâi pentru energia cinetică clasică atunci
când efectele relativiste devin importante? Dar corecţia de ordinul doi?
Rezolvare:
2
0
2 cmcmEc
1
1
1
2
2
0
cmEc , unde
c
u ;
Dezvoltând în serie Taylor:
642
2 16
5
8
3
2
11
1
1
,
se obţine

46
42
0
22
0
2
0
16
5
8
3
2 umum
umEc ;
Corecţia de ordinul întâi pentru energia cinetică este: 22
08
3um ;
Corecţia de ordinul doi pentru energia cinetică este: 42
016
5um .
4. Termodinamică
Parametrii de stare sunt presiunea (p), volumul (V) şi temperatura (T),
dintre care doar doi sunt independenţi datorită ecuaţiei de stare.
f (p,V,T) = 0 – ecuaţie de stare;
Pentru gazul ideal ecuaţia de stare este: pV = νRT, unde ν este numărul de
moli de gaz ideal, iar R = 8,314 J / molK, constanta universală a gazelor.
đL = p dV - lucrul mecanic într-o transformare termodinamică infinitezimală;
Observaţie: đL reprezintă lucrul mecanic corespunzător transformării
infinitezimale şi nu diferenţiala lucrului mecanic, pentru că lucrul mecanic nu
este funcţie de stare.
B
A
pdVL - lucrul mecanic într-o transformare termodinamică între stările
A şi B.
Observaţie: Într-o transformare izocoră L=0.
Energia internă pentru un gaz ideal este funcţie de temperatură: U = ν CV T ;
Observaţie: Într-o transformare izotermă ∆U=0.

47
4.1 Principiul I al termodinamicii
Variaţia energiei interne a unui sistem termodinamic este egală cu energia pe
care sistemul o schimbă cu mediul înconjurător.
dU = đQ – đL - pentru o transformare termodinamică infinitezimală;
Observaţie: Căldura şi lucrul mecanic sunt mărimi de proces şi nu admit
diferenţiale totale exacte – din acest motiv se foloseşte đQ şi đL.
∆U = Q – L – pentru o transformare termodinamică finită;
dT
QdC
1 - căldura molară,
V
p
C
C - indice adiabatic,
Cp = CV + R – relaţia Robert Mayer.
1. Să se calculeze raportul dintre lucrul mecanic efectuat de gaz într-o
transformare izotermă şi una izobară la dilatarea unui gaz din starea p1 , V1 până
la un volum V2 de n =2,5 ori mai mare.
R: 61,01
ln
n
n
L
L
p
T .
2. De câte ori creşte energia internă a unui gaz ideal cu indicele adiabatic
, într-o transformare adiabatică în care volumul scade de n=10 ori ? Pentru
gazul ideal monoatomic 3
5 , iar pentru gazul ideal biatomic
5
7 .
R:
1
2
1
1
2
V
V
U
U; 64.4
1
2
monoU
U, 51.2
1
2
biU
U.

48
3. Să se calculeze variaţia energiei interne pentru 3 moli de gaz ideal cu
indicele adiabatic γ = 1,4 aflat la temperatura de 22 °C atunci când presiunea
creşte de β=2 ori într-o transformare:
a) izocoră;
b) izotermă;
c) adiabatică;
d) în care 2V
T
.
R: a) 4,1811
1
TRU kJ; b) 0U ;
c) 03,411
1
1
TRU kJ; d) 8,101
13
2
1
TRU kJ.
4. Doi kmoli de gaz încălziţi cu 24 ºC, la presiune constantă, absorb 1,4 MJ
de căldură. Dacă R = 8,314 J / molK , să se determine:
a) lucrul mecanic al gazului;
b) variaţia energiei interne;
c) valoarea coeficientului adiabatic.
R: a) L = 0,399 MJ ; b) ∆U = 1,001 MJ ; c) γ =1,4.
5. Un gaz ideal aflat la presiunea 15,5 kPa ocupă un volum de 4,3 m3. În
cursul unei transformări izocore, în care presiunea creşte de α=10 ori, gazul
ideal primeşte o cantitate de căldură de 1,5 MJ. Să se determine coeficientul
adiabatic al acestui gaz ideal.
R: 4,11111 Q
Vp .

49
6. Un gaz ideal cu indicele adiabatic γ suferă o transformare descrisă de
legea Vp , unde este o constantă pozitivă. Ştiind că gazul se dilată de la
volumul V0 la un volum de ori mai mare, să se determine:
a) variaţia energiei interne a gazului;
b) lucrul mecanic efectuat;
c) căldura schimbată;
d) căldura molară a gazului în această transformare.
R: a) 11
2
2
0
VU ; b) 1
2
2
2
0 V
L ; c) 12
1122
0
VQ ;
d) 12
1
RC .
Pentru o transformare termodinamică a cărei lege se cunoaşte se deduce
căldura molară prin integrare folosind primul principiu al termodinamicii.
7. Să se calculeze căldura molară a unui gaz ideal într-un proces în care:
a) 2V
T
, unde α este constantă;
b) 3VT , unde α este constantă.
Rezolvare:
a) Înlocuind în principiul I al termodinamicii: dU = đQ – đL ,
expresiile lui dU, đL şi đQ:
dU = νCV dT , đL = p dV,
dT
QdC
1 đQ = νCdT,
se obţine: νCdT = νCVdT + pdV;
legea transformării căldura molară

50
Din legea transformării termodinamice: 2V
T
,
şi ecuaţia de stare pentru gazul ideal: pV = νRT,
3V
Rp
;
3V
dVRdTCdTC V .
În continuare, fie se integrează această expresie: 2
1
2
1
2
1
3
V
V
T
T
V
T
TV
dVRdTCdTC
şi se obţine:
2
1
2
2
12122 VV
RTTCTTC V
,
dar din legea transformării termodinamice: 2V
T
2
1
2
2
12VV
TT
;
2
RCC V ;
fie se diferenţiază legea transformării termodinamice: dVV
dT3
2 ,
2
3
3
V
V
RCC V
2
RCC V ;
b) R: 3
RCC V .
Pentru o transformare termodinamică a cărei căldură molară se cunoaşte
se deduce legea transformării termodinamice prin integrare, folosind primul
principiu al termodinamicii.
căldura molară legea transformării

51
8. Căldura molară a unui gaz ideal variază, într-o transformare dată, după
legea TC , unde α este constantă. Să se determine legea transformării
termodinamice corespunzătoare.
R: .constVeT VV C
RT
C
9. Să se determine legea transformării termodinamice în care căldura
molară a sistemului rămâne constantă (transformare politropă).
Rezolvare:
đQ = ν C dT
dU = ν CV dT
đL = p dV
Conform principiului I al termodinamicii: dU = đQ - đL
V
dVR
T
dTCC V ,
Dar din ecuaţia de stare a gazului ideal: pV = νRT
T
dT
p
dp
V
dV ,
şi folosind relaţia Robert Mayer: Cp = Cv + R se obţine:
0
p
dp
V
dV
CC
CC
V
p ,
V
p
CC
CCn
- indice politropic,
Prin integare .lnln constpVn
p V n =const. – legea transformării politrope.
10. Care este indicele politropic într-o transformare în care:
a) ;Vp b) 2V
T
; c) 3VT ; d) T
p
;

52
unde α este o constantă pozitivă.
R: a) 1n ; b) 3n ; c) 2n ; d) 2
1n .
11. Într-o transformare politropă volumul unui gaz ideal biatomic
( 4,1 ) scade de 9 ori, iar presiunea creşte de 27 ori. Să se
determine:
a) indicele politropic n;
b) căldura molară a gazului.
Rezolvare:
a) Legea transformării politrope: nn VpVp 2211
1
2
2
1
p
p
V
Vn
, adică n ;
Prin logaritmare se obţine 2
3
ln
ln
n ;
b) V
p
CC
CCn
- indice politropic
1
n
CnCC
pV
V
p
C
C - indice adiabatic, Cp = CV + R – relaţia Robert Mayer
1
RCV ,
1
RC p ;
11
n
nRC
2
RC .
12. Să se determine căldura molară pentru un gaz monoatomic (γ = 5/3)
într-o transformare politropă cu indicele politropic 5,1n .

53
R: 2
RC .
4.2 Principiul II al termodinamicii
Ciclul Carnot este o transformare ciclică reversibilă formată din două
adiabate şi două izoterme la temperaturile T1 şi T2 (T1 > T2 ).
.primQ
L - randamentul unui ciclu,
L – lucrul mecanic efectuat în cursul ciclului,
Qprim – căldura absorbită pe parcursul transformării ciclice;
.
.1
prim
ced
Q
Q ;
Qced. – căldura cedată pe parcursul transformării ciclice;
1
21T
TC - randamentul ciclului Carnot care funcţionează între temperaturile
T1 şi T2 (T1 > T2 ).
Orice motor termic care funcţionează între temperaturile T1 şi T2 are un
randament mai mic decât randamentul ciclului Carnot care funcţionează între
aceleaşi temperaturi.
13. Să se calculeze randamentul unui ciclu format dintr-o izotermă (12),
o izobară (23) şi o adiabată (31) dacă agentul termic este un gaz ideal cu
coeficientul adiabatic γ. Se cunoaşte raportul β dintre presiunea maximă şi
minimă a ciclului (min
max
p
p ). Care este randamentul unui ciclu Carnot care ar
funcţiona între temperatura minimă şi maximă ale ciclului de mai sus.
Rezolvare:

54
2
1
1212
V
V
dVVpLQ , pentru că 12 este transformare izotermă ,
1
2212 ln
V
VTRQ ;
2323 TTCQ p , pentru că 23 este transformare izobară , 2
2
3
3
T
V
T
V ,
1
2
3
223V
VTCQ p ;
a) Când izoterma este la temperatura b) Când izoterma este la temperatura
minimă a ciclului: maximă a ciclului:
2max1min VpVp 2
1
V
V, 2min1max VpVp
1
2
V
V,
1min3max VpVp
1
3
1 V
V,
1max3min VpVp
1
1
3 V
V,
1
2
3
V
V,
1
2
3
V
V,
2
izoterma
V
p
pmax
pmin
3
1
V
p
pmax
pmin
1
3 2
izoterma

55
ln212 RTQQced , ln212 RTQQprim ,
11
1
223
TRQQprim , 1
1
1
223
TRQQced ,
1
ln11
1
;
ln
1
11
1
;
Randamentul ciclului Carnot care funcţionează între temperatura minimă
şi maximă ale ciclului de mai sus este:
1
1C .
14. Să se calculeze randamentul unui ciclu format dintr-o izotermă (12),
o izocoră (23) şi o adiabată (31) dacă agentul termic este un gaz ideal cu
coeficientul adiabatic γ. Se cunoaşte raportul α dintre volumul maxim şi minim
a ciclului (min
max
V
V ). Care este randamentul unui ciclu Carnot care ar
funcţiona între temperatura minimă şi maximă ale ciclului de mai sus.
R: a) Când izoterma este la temperatura minimă a ciclului:
1
ln11
1
;
b) Când izoterma este la temperatura maximă a ciclului:
izoterma
V
p
Vmax Vmin
1
3
2

56
ln1
11
1
;
Randamentul ciclului Carnot care funcţionează între temperaturile
minimă şi maximă ale ciclului de mai sus:
11C .
Principiul II al termodinamicii reflectă o tendinţă: energia „curge”
dinspre locurile unde este concentrată, spre locurile unde este dispersată cât mai
mult.
Inegalitatea lui Clausius: 0T
Qd, unde semnul egal are sens pentru
transformări reversibile, iar „<” pentru transformări ireversibile.
T
QddS , S – entropia.
Entropia este măsura energiei dispersate ca funcţie de temperatură.
Observaţie: Presiunea, volumul, temperatura sunt parametri de stare, iar
energia internă şi entropia sunt funcţii de stare, pe când căldura şi lucrul
mecanic sunt mărimi fizice care au sens numai în transformări termodinamice.
Pentru transformările reversibile:
B
AT
QdASBS )()( ;
V
p
Vmax Vmin
1
2
3
izoterma

57
Pentru transformările ireversibile:
B
AT
QdASBS )()( .
Observaţie: Într-o transformare adiabatică ∆S = 0.
15. Calculaţi creşterea entropiei pentru 5 moli de gaz ideal cu indicele
adiabatic 4,1 într-o transformare în care volumul scade de 3 ori, iar
presiunea creşte de 5 ori.
Rezolvare:
Volumul scade de α ori
1
1
2 V
V,
Presiunea creşte de β ori 1
2
p
p;
đQ = T dS,
dU = ν CV dT,
đL = p dV,
Conform principiului I al termodinamicii: dU = đQ - đL
T dS = ν CV dT + p dV.
Prin integrare se obţine: 1
2
1
2 lnlnV
VR
T
TCS V ,
Dar 2
22
1
11
T
Vp
T
Vp
1
2
1
2
1
2
V
V
p
p
T
T,
1lnln
1R
RS
,
lnln
1
RS = 7,41 J/K .

58
16. Calculaţi variaţia entropiei pentru 3 moli de gaz ideal cu indicele
adiabatic 4,1 atunci când volumul creşte de 4 ori într-o transformare:
a) izobară;
b) izotermă;
c) adiabatică.
R: a) ∆S = ν Cp ln α = 121 J/K; b) ∆S = ν R ln α = 34,5 J/K; c) ∆S = 0.,
17. Calculaţi variaţia entropiei pentru 3 kmoli de gaz ideal monoatomic
(3
5 ) atunci când temperatura sa creşte de α=10 ori într-o transformare:
a) izocoră;
b) izobară.
R: a) lnVCS =86,14 kJ/K; b) lnpCS =143,57 kJ/K.
18. Un gaz ideal cu indicele adiabatic γ suferă o transformare de forma
a) VTT 0 ;
b) V
TT
0 ;
c) Vpp 0 ;
unde 0T , p0 şi sunt constante pozitive. Să se determine pentru ce valoare a
volumului entropia este maximă.
Rezolvare:
a) T dS = ν CV dT + p dV
V
dVR
T
dTRdS
1

59
Prin integrare şi înlocuirea legii de transformare se obţine entropia S ca
funcţie de volum:
cVVTRVS
lnln
1
10
, unde c este o constantă de integrare;
S=max. 0dV
dS şi 0
2
2
dV
Sd ,
01 TV
;
b) R: 12
0
TV ; c) R:
10
pV .
60
Bibliografie
[1] Ch. Kittel, W.D. Knight, M.A. Ruderman, Cursul de fizică Berkeley,
volumul I, Mecanică, Ed. Didactică şi Pedagogică, Bucureşti, 1981;
[2] I. Irodov, I. Savéliev, O. Zamcha, Recueil de problèmes de physique
générale, Ed. Mir, Moscou, 1976;
[3] I. Irodov, Problèmes de physique générale, Ed. Mir, Moscou, 1983;
[4] V. Dorobanţu, Fizica între teamă şi respect, volumul I, Mecanică
clasică, Ed. Politehnica, Timişoara, 2003;
[5] V. Dorobanţu, Fizica între teamă şi respect, volumul II, Teoria
Relativităţii, Ed. Politehnica, Timişoara, 2004;
[6] J.J. Molitoris, The Best Test Preparation for the Graduate Record
Examination (GRE) in Physics, Research & Education Association, 1993;
[7] A. Hristev, Mecanică şi acustică, Ed. Didactică şi Pedagogică,
Bucureşti, 1984;
[8] E. Fermi, Termodinamica, Ed. Ştiinţifică, 1969;
[9] L.G. Grechko, V.I. Sugakov, O.S. Tomas Evich, A.M. Fedorchenko,
Problems in Theoretical Physics, Mir Publishers, Moscow, 1977.