MODULUL 4N: (T) STABILITATEA SISTEMELOR DINAMICE...
32
1 MODULUL 4N: (T) STABILITATEA SISTEMELOR DINAMICE NELINIARE ANALIZA STABILITATII CU AJUTORUL FUNCTIEI DE DESCRIERE. DETERMINAREA PARAMETRILOR CICLURILOR LIMITA. TEORIA STABILITATII IN SENS LIAPUNOV 1. Stabilitatea sistemelor neliniare continuale 2. Stabilitatea sistemelor neliniare discrete 3. Analiza calitativa a sistemelor neliniare prin metoda de liniarizare TEORIA STABILITATII IN SENS POPOV 1. Criteriul Popov pentru sisteme cu partea liniara stabila 2. Teorema Popov pentru cazul partii liniare instabile 3. Analiza stabilitatii absolute a starii de echilibru
Transcript of MODULUL 4N: (T) STABILITATEA SISTEMELOR DINAMICE...
1
MODULUL 4N: (T)
STABILITATEA SISTEMELOR DINAMICE NELINIARE
ANALIZA STABILITATII CU AJUTORUL FUNCTIEI DE
DESCRIERE.
DETERMINAREA PARAMETRILOR CICLURILOR LIMITA.
TEORIA STABILITATII IN SENS LIAPUNOV 1. Stabilitatea sistemelor neliniare continuale
2. Stabilitatea sistemelor neliniare discrete
3. Analiza calitativa a sistemelor neliniare prin metoda de liniarizare
TEORIA STABILITATII IN SENS POPOV 1. Criteriul Popov pentru sisteme cu partea liniara stabila
2. Teorema Popov pentru cazul partii liniare instabile
3. Analiza stabilitatii absolute a starii de echilibru

2
ANALIZA STABILITATII CU AJUTORUL FUNCTIEI DE
DESCRIERE.
DETERMINAREA PARAMETRILOR CICLURILOR LIMITA.
In cazul sistemelor de reglare automata neliniare (in special pentru sisteme cu actiune
de tip releu) functionarea normala a sistemului poate fi o functionare autooscilanta, caz in care
apare necesitatea stabilirii (cel putin) parametrilor de autooscilatie respectiv amplitudinea si
pulsatia de autooscilatie. Pentru cazul in care oscilatiile sunt nedorite apare necesitatea
elaborarii unor proceduri de sinteza a unor corectoare care sa permita eliminarea acestor
autooscilatii.
Sistem
liniar
Sistem
neliniar
x y
-
Fig. 1
Analiza pe care o propunem in continuare se va face pe o structura standard (vezi
figura 1) cu reactie inversa, la care sistemul este decompozabil intr-un sistem liniar si un
sistem neliniar.
Consideram ca partea liniara este caracterizata prin functia de transfer
)(
)()(
sD
sNsH =
Partea neliniara a sistemului considerat o presupunem in forma ( , )y f x x= , avand
coeficientii de liniarizare armonica ),('),,( AqAq .
In aceste conditii:
xsAq
Aqxdt
dAqxAqy
+=+=
),('),(
),('),(
unde s trebui privit ca operator de derivare (dt
ds = ). Pe de alta parte din dependenta liniara
obtinem:
ysNxsD −= )()(
In final metoda liniarizarii armonice permite caracterizarea sistemului functionand in circuit
inchis prin ecuatia:
0),('
),()()( =
++ xs
AqAqsNsD
In ipoteza ca A si sunt constante (o astfel de situatie ne intereseaza) coeficientii de
liniarizare armonica sunt constanti iar ecuatia diferentiala prezentata este o ecuatie diferentiala
liniara cu coeficienti constanti. Ecuatia caracteristica asociata acestei ecuatii diferentiale este
de forma:
'( , )( ) ( ) ( ) ( , )A
q AD N q A
= + +
3
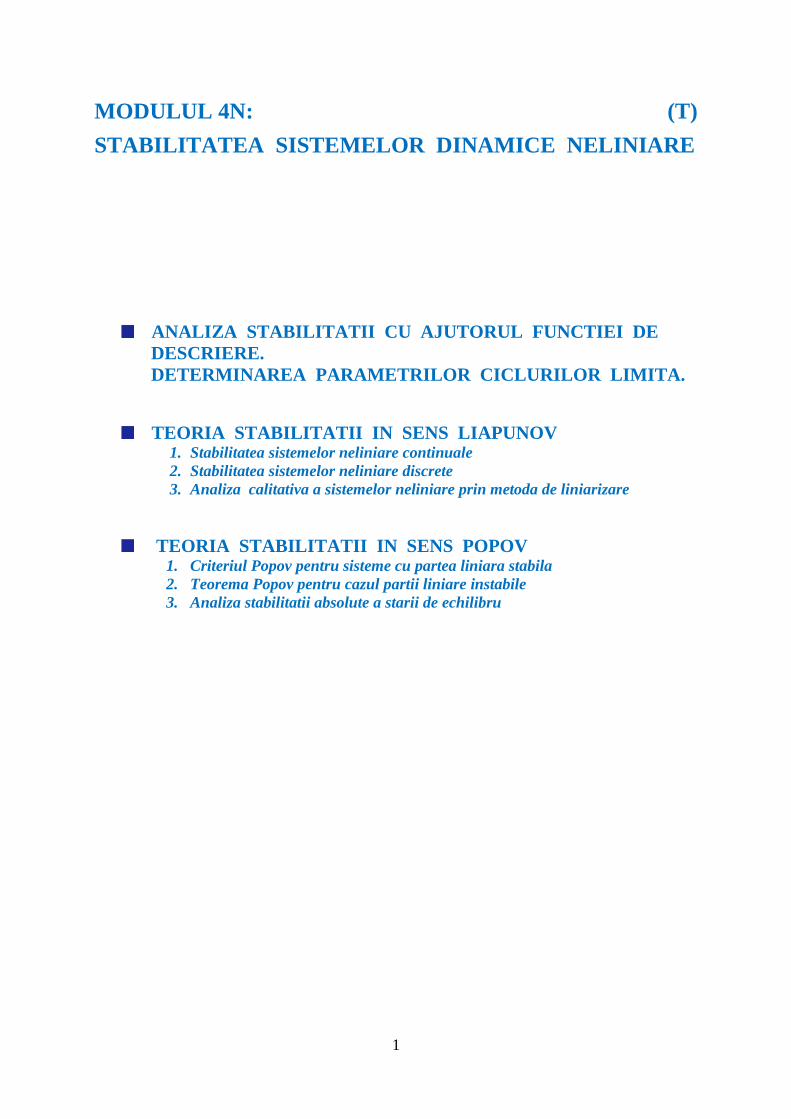
Presupunem ca se genereaza un regim autooscilant cu amplitudinea pA si pulsatia p
si prin urmare tAtx pp sin)( = . O astfel de situatie impune ca sistemul liniar echivalent sa
fie la limita de stabilitate iar 0)( =D trebuie sa aiba radacini pur imaginare pj =2,1 .
))(Re( jS
))(Im( jS
0=p=
Fig. 2
Conform criteriului Cremer-Leonhard-Mihailov sistemul este la limita de stabilitate
daca hodograful ( )A j trece prin centrul sistemului de coordonate. Pulsatia la care are loc o
astfel de intersectie este tocmai pulsatia de autooscilatie (vezi figura 2).
Daca notam ( ) ( , ) ( , )A j U A jV A = + conditia ca hodograful sa treaca prin
origine este ca:
0),(
0),(
=
=
pp
pp
AV
AU
Prin solutionarea sistemului de ecuatii algebrice putem stabili analitic amplitudinea
ciclului limita pA precum si pulsatia acestuia p .
Evaluarea parametrilor ciclurilor limita poate fi facuta si printr-o reinterpretare a
criteriului de stabilitate Nyquist.
Vom defini functia de transfer aproximativa a partii neliniare in forma:
sAq
AqAsH n +=
),('),(),,(
Daca inlocuim js = obtinem caracterizarea frecventiala echivalenta pentru partea
nelini- ara a sistemului:
),('),(),( AjqAqAjH n +=
In conformitate cu criteriul Nyquist, sistemul liniarizat se afla la limita de stabilitate
daca hodograful sistemului functionand in circuit inchis trece prin punctul de coordonate
)0,1( j− .
Prin urmare trebui indeplinita conditia:
1),()( −= ppnp AjHjH
sau
),(
1)(
ppn
pAjH
jH
−=

4
In multe cazuri concrete functia de transfer echivalenta a partii neliniare este dependenta
exclusiv de amplitudine incat conditia de autooscilatie se simplifica:
)(
1)(
pn
pAH
jH −=
)( jH
)(
1
AHn
−
→
p =
Im
Re
Fig. 3
Ultima relatie permite o interpretare grafica si totodata poate oferi o metoda de
solutionare.
Ideea este de a trasa pe o aceeasi diagrama Im)(Re, hodograful asociat functiei de
transfer ce caracterizeaza partea liniara cat si hodograful asociat termenului
−
)(
1
AH n
.
Eventuala intersectie intre cele doua curbe remarca existenta unui ciclu limita. Pulsatia
p poate fi citita pe hodograf iar amplitudinea de autooscilatie pe graficul lui
−
)(
1
AH n
(vezi figura 3).
Metoda L.C. Goldfarb
Metoda a fost elaborata de L.C.Goldfarb in 1917 si permite evaluarea aproximativa a
pulsatiei si amplitudinii de autooscilatie a unui sistem automat in configuratie clasica.
Metoda se bazeaza pe interpretarea grafica a relatiei fundamentale anterior stabilite:
( )( )Aq
jH1
−=
Metoda se aplica astfel:
• intr-un acelasi sistem de axe de coordonate se traseaza hodograful asociat partii
liniare si graficul inversei functiei de descriere cu semn schimbat asociat partii
neliniare.
5
• la intersectia celor doua curbe citim pulsatia de autooscilatie pe ( )0 iar pe
curba ce prezinta inversul functiei de descriere cu semn schimbat citim
amplitudinea A de autooscilatie.
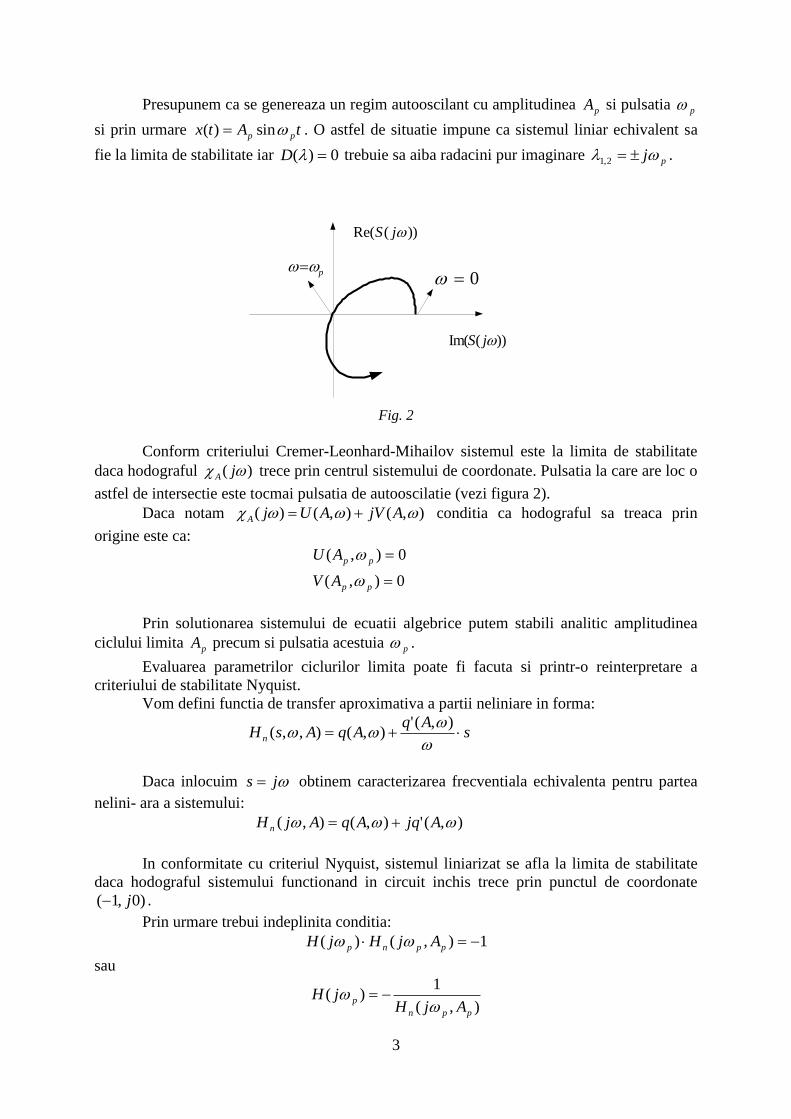
Exemplu
Metodele anterior prezentate privind posibilitatea determinarii aproximative a parame-
trilor regimurilor autooscilante vor fi prezentate pe un exemplu de sistem automat neliniar
decompozabil intr-un sistem cu caracteristica de tip releu ideal cu amplitudinea de comutatie
1c = in serie cu un sistem dinamic liniar cu functia de transfer:
4.0,6.0,sec100,)12(
)( 1
22===
++= −
Tk
sTsTs
ksH
Fig. 4
Schema de simulare este prezentata in figura 4. Singurul lucru pe care il remarcam
alaturi de intocmirea schemei de simulare este faptul ca in locul releului bipozitional fara
histerezis este utilizat un releu bipozitional cu histerezis dar setat astfel incat comutarile sa
aiba loc la eps ,unde eps reprezinta zeroul programului de simulare.
Rezultatele obtinute prin simulare sunt prezentate in diagrama din figura 5.
Intr-un exemplu prezentat anterior am stabilit ecuatia de liniarizare armonica pentru
caracteristica de releu ideal:
xA
cy
=
4
Ecuatia partii liniare este de forma:
( ) ykxsTsTs −=++ 1222
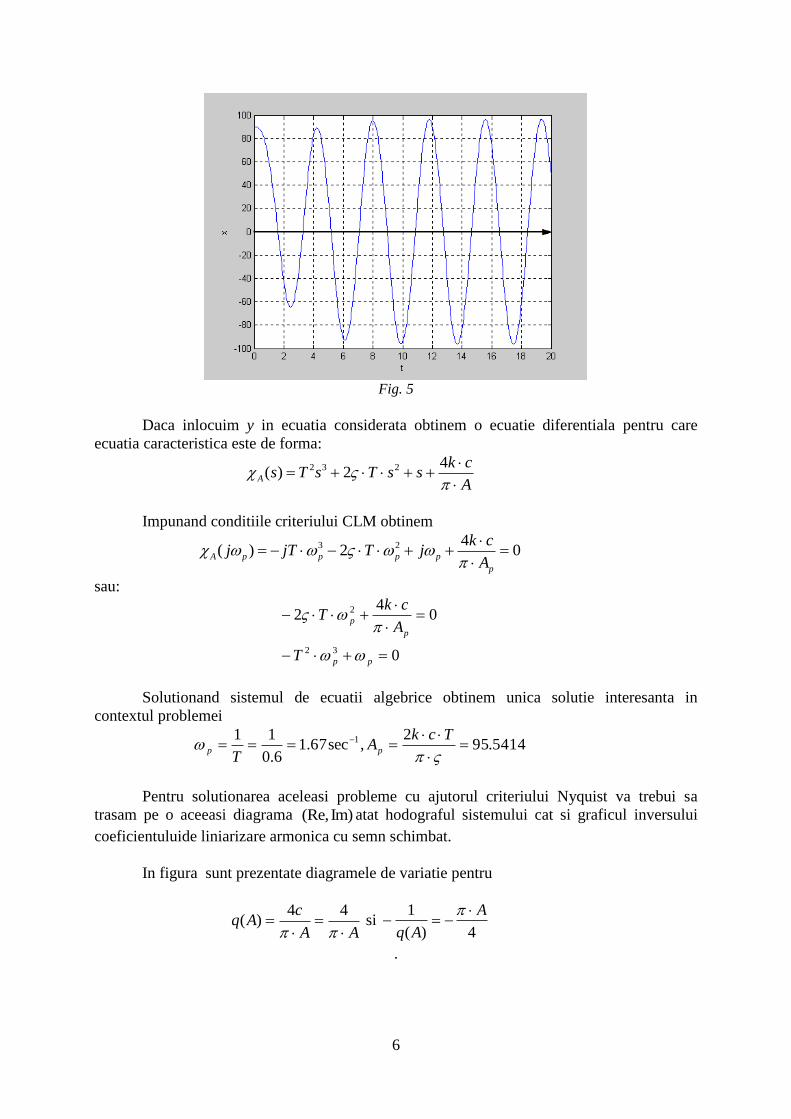
6
Fig. 5
Daca inlocuim y in ecuatia considerata obtinem o ecuatie diferentiala pentru care
ecuatia caracteristica este de forma:
2 3 2 4( ) 2A
k cs T s T s s
A
= + + +
Impunand conditiile criteriului CLM obtinem
3 2 4( ) 2 0A p p p p
p
k cj jT T j
A
= − − + + =
sau:
0
04
2
32
2
=+−
=
+−
pp
p
p
T
A
ckT
Solutionand sistemul de ecuatii algebrice obtinem unica solutie interesanta in
contextul problemei
5414.952
,sec67.16.0
11 1 =
==== −
TckA
Tpp
Pentru solutionarea aceleasi probleme cu ajutorul criteriului Nyquist va trebui sa
trasam pe o aceeasi diagrama Im)(Re, atat hodograful sistemului cat si graficul inversului
coeficientuluide liniarizare armonica cu semn schimbat.
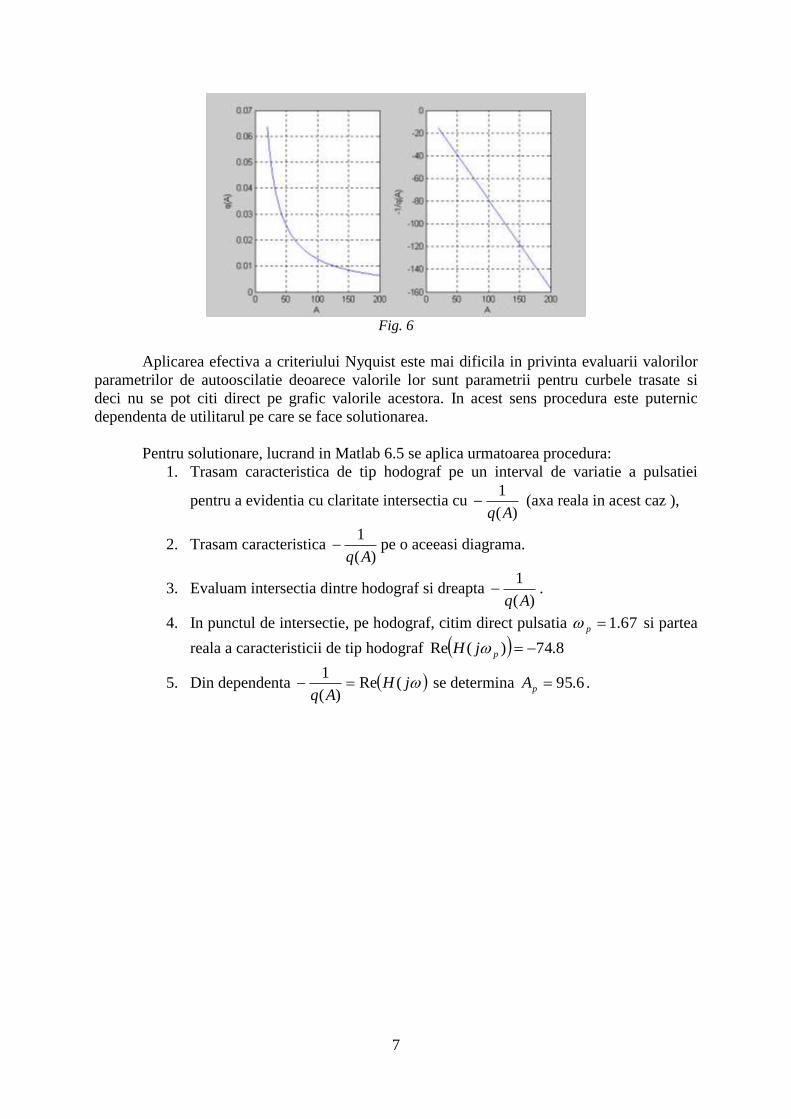
In figura sunt prezentate diagramele de variatie pentru
AA
cAq
=
=
44)( si
4)(
1 A
Aq
−=−
.
7
Fig. 6
Aplicarea efectiva a criteriului Nyquist este mai dificila in privinta evaluarii valorilor
parametrilor de autooscilatie deoarece valorile lor sunt parametrii pentru curbele trasate si
deci nu se pot citi direct pe grafic valorile acestora. In acest sens procedura este puternic
dependenta de utilitarul pe care se face solutionarea.
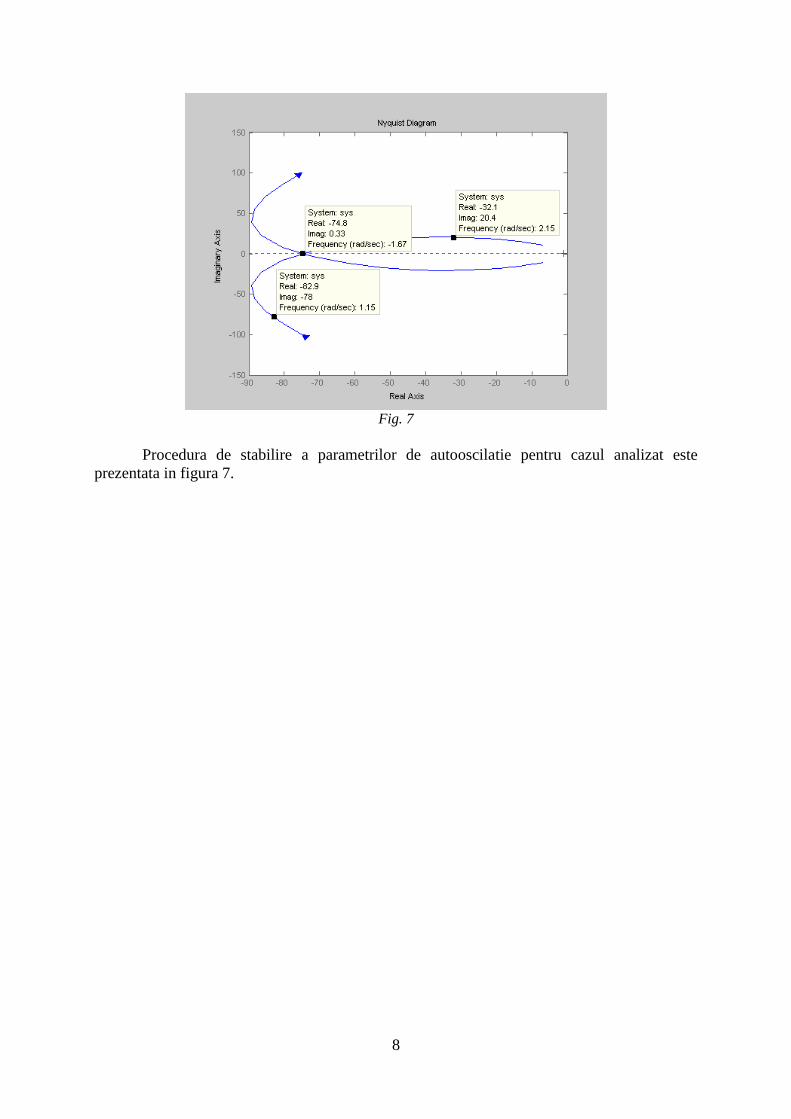
Pentru solutionare, lucrand in Matlab 6.5 se aplica urmatoarea procedura:
1. Trasam caracteristica de tip hodograf pe un interval de variatie a pulsatiei
pentru a evidentia cu claritate intersectia cu )(
1
Aq− (axa reala in acest caz ),
2. Trasam caracteristica )(
1
Aq− pe o aceeasi diagrama.
3. Evaluam intersectia dintre hodograf si dreapta )(
1
Aq− .
4. In punctul de intersectie, pe hodograf, citim direct pulsatia 67.1=p si partea
reala a caracteristicii de tip hodograf ( ) 8.74)(Re −=pjH
5. Din dependenta ( )jHAq
(Re)(
1=− se determina 6.95=pA .
8
Fig. 7
Procedura de stabilire a parametrilor de autooscilatie pentru cazul analizat este
prezentata in figura 7.
9
TEORIA STABILITATII IN SENS LIAPUNOV
Problema stabilitatii sistemelor dinamice neliniare este mult mai delicata decat analiza
in cadrul liniar. Vom prezenta in acest paragraf cateva elemente fundamentale cu caracter
definitoriu si cateva teoreme ce lanseaza tehnici de evaluare a stabilitatii sistemelor dinamice
neliniare. In sfarsit, vom justifica in ce conditii analiza stabilitatii prin metode specifice
cadrului liniar asupra unui model liniarizat este relevanta in raport cu comportarea sistemului
initial neliniar.
1. Stabilitatea sistemelor neliniare continuale.
Consideram un sistem dinamic neliniar continual caracterizat matricial in forma:
),( xtfdt
dx= (1)
cu xRn, f - functie vectoriala continua in raport cu toate argumentele si admitand derivate
partiale continue in raport cu oricare din variabilele ).....,( 21 nxxx . In aceste conditii, este
satisfacuta teorema de existenta si unicitate. Fie o initializare oricare (t0, x0) pentru care
solutia ( ) ( )x t t= satisface 0 0( )t x = si pe care o consideram prelungibila la infinit. Prin
urmare consideram solutia )0( ) ,t definita pe t .
• Definitie. Solutia ( )t este stabila in sens Liapunov pentru t → , daca pentru
( ) 0, ( ) ( ) 0 astfel ca oricare solutie ( )i ix t= cu initializarea la 0t
satisfacand 0 0( ) ( ) , 1,i it t i n − va asigura
0( ) ( )i it t pe t t − si pentru ( ) 1,i n .
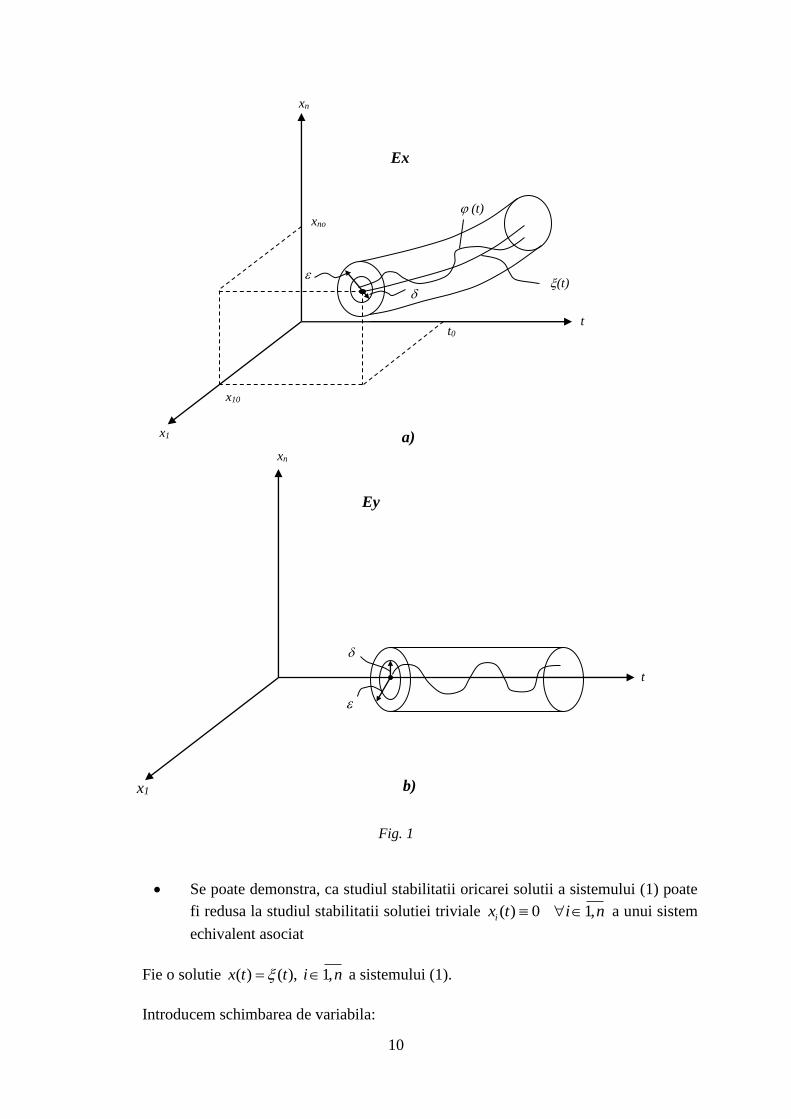
Interpretarea geometrica a definitiei este imediata: oricare traiectorie initializata
intr-o - vecinatate a lui x0, evolueaza intr-un - tub in jurul traiectoriei (t).
• Definitie. Solutia ( )t este instabila, daca exista 0 astfel incat pentru
0 pot stabili un moment de timp 1t t= astfel ca pentru cel putin un i k= ,
1 1( ) ( )k kt t − cu toate ca 0 0( ) ( ) , ( ) 1,i it t i n − .
• Definitie. Solutia ( )t se numeste asimptotic stabila daca sunt indeplinite
urmatoarele conditii:
i) solutia ( )t este stabila in sens Liapunov pentru t → ;
ii) exista un numar 0H , incat oricare solutie initializata la 0t t= cu
0 0( ) ( ) , 1,i it t H i n − asigura 0 0lim ( ) ( ) 0, ( ) 1,i it
t t i n →
− =
Daca H = putem spune despre sistemul dinamic ca este global
stabil.
Cadrul definitoriu prezentat precizeaza ca in cazul sistemelor dinamice neliniare
analiza stabilitatii este orientata pe o solutie si nu asupra sistemului.
10
Fig. 1
• Se poate demonstra, ca studiul stabilitatii oricarei solutii a sistemului (1) poate
fi redusa la studiul stabilitatii solutiei triviale ( ) 0 1,ix t i n a unui sistem
echivalent asociat
Fie o solutie ( ) ( ), 1,x t t i n= a sistemului (1).
Introducem schimbarea de variabila:
(t)
xn
x1
t t0
x10
xno
a)
(t)
Ex
xn
x1
t
b)
Ey

11
( ), 1,i iy x t i n= − (2)
Derivand in ambele parti obtinem:
( ) ( )1 1 1, ( ), , ( ) , ( ), , ( ) 1,ii n n i n
dyf t y t y t f t t t i n
dt = + + − (3)
Vom introduce sistemul de functii:
( ) ( ) ( )1 1 1 1, , , , ( ), , ( ) , ( ), , ( )i n i n n i nt y y f t y t y t f t t t = + + −
incat ecuatia (5) devine:
( )1 2, , , , 1,ii n
dyt y y y i n
dt= (4)
Evident ( ), 0,0, ,0 0i t si deci sistemul (4) admite solutia triviala ( ) 0iy t .
Sistemul (6) poarta numele de sistemul de ecuatii al traiectoriei perturbate.
Consideram spatiul solutiilor Ex al sistemului (1) si Ey asociat sistemului (4) (vezi
figura 1).
Conform (2), fiecarei curbe integrale din Ex ii va corespunde unic o curba integrala in
Ey. Traiectoriei ( ) , 1,i it x i n = ii va corespunde traiectoria asociata solutiei triviale
( ) 0iy t . Daca solutia ( ) 1,i ix t i n= este stabila in Ex atunci solutia ( ) 0 1,iy t i n
este stabila in Ey si reciproc.
Din acest motiv, studiul stabilitatii solutiei ( ) 1,i ix t i n= a sistemului original (1)
poate fi facuta analizand solutia trivial ( ) 0 1,iy t i n a sistemului echivalent asociat (4).
Solutia triviala ( ) 0 1,iy t i n este stabila in sens Liapunov daca pentru
( )0, 0 dependent de si t0 incat oricare solutie ( ) ( ) 1,i iy t t i n= care pentru
0t t= asigura 0( ) 1,i t i n satisface inegalitatea )0 0( ) ,i t pentru t t .
In cazul in care sistemul dinamic neliniar este invariant in timp, deci in cazul in care
functiile ( , ) 1,if t x i n nu contin explicit variabila timp solutiile sistemului algebric
neliniar.
( )1 2, , , 0 1,i nf x x x i n= (5)
fixeaza eventualele stari de echilibru ale sistemului analizat. Daca consideram ( **
2
*
1 ,...,, nxxx ) o
solutie a sistemului (5), propunem schimbarea de coordonate: **
222
*
111 ,, nnn xxyxxyxxy −=−=−= (6)
Analiza stabilitatii solutiei triviale pentru sistemul echivalent precizeaza stabilitatea
solutiei de echilibru ( **
2
*
1 ,...,, nxxx ) a sistemului initial considerat.
Odata fixat acest cadru definitoriu, vom prezenta in continuare cateva teoreme ce
permit evaluarea stabilitatii Liapunov pentru solutia triviala.

12
Teorema de stabilitatea Liapunov
Daca pentru sistemul dinamic neliniar
( )( )txfdt
tdx=
)( (7)
putem determina functia pozitiv definita V(x) a carei derivata in virtutea sistemului analizat
(7) este negativ semidefinita, atunci solutia triviala ( ) 0x t a sistemului (7) este stabila in
sens Liapunov.
Functia V(x) functia Liapunov spunem ca este pozitiv semidefinita (negativ
semidefinita) pe multimea G Rn daca V(x) 0 (V(x) 0) pentru () x G.
Spunem ca functia V(x) este pozitiv definita (negativ definita) pe G daca pentru
x G \ {0}, V(x) > 0 (V(x) < 0) si V(0) = 0.
Derivata functiei ( )V x in virtutea sistemului (7) va fi:
( )
( ) ( ) ( )nn
n
nn
n
n
xxxfdx
dVxxxf
dx
dVxxxf
dx
dV
dt
dx
dx
dV
dt
dx
dx
dV
dt
dx
dx
dV
dt
txdV
,...,,...,...,,,...,,
...)(
21212
2
211
1
2
2
1
1
+++=
=+++=
(8)
Introducem functia gradient asociata functiei Liapunov
1 2
( ) ( ) , ,...,
T
n
dV dV dVV x grad V x
dx dx dx
= =
derivata in virtutea sistemului se obtine in forma:
( ) ( )xfxVdt
dV T = (9)
Formula (9) arata ca derivata in virtutea sistemului reprezinta produsul scalar dintre
vectorul V si vectorul viteza de variatie a lui ( )f x . Daca consideram in Rn hipersuprafata
( ) .V x const= , pentru 0dV
dt traiectoriile de stare ale sistemului intersecteaza hipersuprafata
( ) .V x const= , in sensul cresterii valorilor V(x) iar pentru dt
dV < 0 traiectoriile evolueaza
intersectand suprafetele V(x) pe sensul descresterii acestor valori.
Fig. 2
(t)
x2
x1
→
U f(x)

13
Pentru evaluarea stabilitatii asimptotice Liapunov, teorema precedenta se modifica
astfel:
Teorema Liapunov de stabilitate asimptotica
Daca pentru sistemul (11) putem determina ( )V x pozitiv definita incat derivata in
virtutea sistemului este negativ definita atunci solutia triviala ( ) 0x t este o solutie
asimptotic stabila in sens Liapunov pentru sistemul analizat.
Desi in aparenta celor doua teoreme par a rezolva problema analizei stabilitatii
sistemelor neliniare, constructia functiei Liapunov asociata unui sistem este o problema
extrem de delicata si totodata dificila.
In sfarsit, o ultima teorema privind analiza stabilitatii Liapunov a solutiei triviale,
prezinta posibilitatea fixarii conditiilor in care solutia triviala este instabila.
Teorema Liapunov de instabilitate
Daca pentru sistemul (7) exista functia ( )V x cu ( ) 0V x = , pentru care derivata in
virtutea sistemului este de semn semidefinit si pentru care in oricare vecinatatea a originii
exista puncte pentru care semnul lui ( )V x si a lui W(x) = ( )dV
W xdt
= coincid, atunci solutia
triviala este instabila in sens Liapunov.
Fie in continuare sistemul dinamic neliniar caracterizat in forma (7), si pentru care
( ) 0f x = , deci pentru care originea sistemului de coordonate constituie un punct de echilibru.
Cum am precizat anterior, studiul stabilitatii oricarei solutii de echilibru poate fi
redusa printr-o schimbare de coordonate adecvata la studiul stabilitatii solutiei triviale.
Consideram ca functiile 1 2( , ,..., ) 1,i nf x x x i n admite derivate partiale in raport cu
toate variabilele pe multimea Hx .
Dezvoltam in serie Taylor aceste functii in jurul originii:
1 2 1 2
1
( , ,..., ) ( , ,..., ) 1,n
i n ij j i n
j
f x x x a x x x x i n=
= + (10)
unde
0=
= x
j
i
ijx
fa (11)
iar functiile satisfac evident conditia:
( )0
,...,,lim
21=
→ x
xxx ni
ox
(12)
Sistemul initial (7) poate fi caracterizat in forma:
)(xAxdt
dx+= (13)
in care nxn
ijA a R = iar ( )x este o functie vector coloana pentru care

14
0)(
lim =→ x
x
ox
(14)
Sistemul dinamic liniar, neted si invariant
)(tAxdt
dx= (15)
poarta numele de sistem liniarizat in prima aproximare.
Legat de o astfel de abordare, prezentam doua rezultate extrem de utile in dezvoltari
aplicative.
Teorema Liapunov (asupra stabilitatii pentru sisteme in prima aproximare). Solutia
triviala a sistemului neliniar (13) este o solutie asimptotica in sens Liapunov, daca
( )A − .
Analiza locatiei in semiplanul stang al variabilelor complexe este o problema relativ
simpla si poate fi facuta cu tehnici specifice teoriei liniare.
Teorema Liapunov (asupra instabilitatii solutiei pentru sistemul in prima
aproximare). Consideram sistemul (13), daca ( ) ( ) Re 0i iA cu , atunci solutia
triviala a sistemului este instabila.
2. Stabilitatea sistemelor dinamice neliniare, discrete
Fie sistemul dinamic discret, caracterizat prin sistemul cu diferente neliniar:
( )1 2( 1) ( ), ( ), , ( ) , 1,i i nx k g x k x k x k i n+ = (16)
Functiile ig sunt definite si continue in raport cu toate argumentele.
In aceste conditii initializarea sistemului pentru 0k = cu setul de valori initiale
( )1 2(0), (0), , (0)nx x x permite evaluarea starii sistemului ( )1 2( ), ( ), , ( )nx m x m x m pentru oricare
m N .
Solutia obtinuta depinde continuu de conditiile de initializare.
Vom considera ca exista nR pentru care
2
1
, 0n
i
i
x b b=
(17)
astfel ca functiile ig continue in partea dreapta a sistemului (16) sa fie continue in raport cu toate argumentele si
sa nu se analizeze simultan decat in originea axelor 1 2 0nx x x= = = = pentru care
( )0,0, ,0 0 1,ig i n= (18)
In aceste conditii originea reprezinta un inveriant in raport cu transformarea indusa de sistemul de
functii 1,ig i n .
Punctul 1 2 0nx x x= = = = reprezinta solutia triviala a sistemului analizat sau conform
terminologiei introduse de Liapunov reprezinta solutia neperturbata a sistemului dinamic.
Sistemul de ecuatii (16) reprezinta ecuatiile traiectoriei perturbate iar solutia acestui sistem reprezinta
traiectoria perturbata.
Pentru cazul sistemelor discrete, definirea stabilitatii traiectoriei neperturbate (solutia triviala) in sens
Liapunov, este data de urmatoarea definitie.

15
Definitie
Daca pentru un > 0 arbitrar de mic, putem determina ( ) 0 astfel incat oricare traiectorie
perturbata ( )1 2( ), ( ), , ( )nx k x k x k care este initializata la 0k = in restrictia
( ) ( )2
1
0n
i
i
x =
(19)
satisface pentru m > 0
( )2
1
n
i
i
x k =
(20)
spunem ca traiectoria neperturbata este stabila in sens Liapunov.
In caz contrar, solutia neperturbata este instabila.
Daca in plus
lim ( ) 0 1,ik
x k i n→
= (21)
spunem ca solutia neperturbata este asimptotic stabila in sens Liapunov.
Consideram functia
( )1 2, , , : n
nV x x x R R→
astfel incat pe o vecinatate a originii
Hxn
i
i =1
2
sa fie definita, continua in raport cu toate argumentele, nenula in toate punctele vecinatatii cu exceptia originii
( )0,0, ,0 0V = .
Vom nota:
( )1 2( ), ( ), , ( )n kV x k x k x k V= (22)
si vom considera ca prima diferenta in virtutea sistemului (16) expresia 1k kV V+ − in care componentele
( )1 2( 1), ( 1), , ( 1)nx k x k x k+ + + se determina pe baza ( )1 2( ), ( ), , ( )nx k x k x k prin sistemul (16).
Teorema de stabilitate Liapunov
Daca pentru sistemul (16) al traiectoriei perturbate pot determina functia ( )1 2, , , nV x x x , xn) de
semn definit, pentru care prima diferenta in virtutea sistemului este de semn semidefinit cu semn contrar fata de
V atunci solutia triviala (solutia neperturbata) este stabila in sens Liapunov.
Cea de a doua teorema pe care o prezentam in continuare fixeaza conditiile de stabilitate asimptotica
pentru solutia neperturbata.
Teorema Liapunov de stabilitate asimptotica
Daca pentru sistemul (16) al traiectoriei perturbate pot determina functia V de semn definit astfel ca
prima variatie a acesteia in virtutea sistemului sa fie o functie de semn definit, avand semn contrar lui V atunci
traiectoria neperturbata este stabila asimptotic.
Ca si in cazul sistemelor neliniare netede, exista rezultate ce stabilesc conditiile pentru care traiectoria
neperturbata este instabila.
Teorema de instabilitate Liapunov
Daca pentru sistemul de ecuatii (16) al traiectoriei perturbate pot determina functia V care are prima
variatie in virtutea sistemului de semn definit si pentru care semnele coincid atunci solutia neperturbata a
sistemului este instabila.

16
Similar analizei sistemelor neliniare netede, putem formula o teorema de analiza a stabilitati pentru
sisteme neliniare discrete in prima aproximare.
Forma in prima aproximare pentru sistemul (16) devine:
( 1) ( ) ( )x k Ax k g x+ = + (23)
in care nxnA R si )(~ xg vectorul functie ce satisface
0)(
lim =→ x
xg
ox
Stabilitatea traiectoriei neperturbate este asigurata daca
( ) 0
1 1A U z C z =
3. Analiza calitativa a S.D.N. prin metode de liniarizare
Consideram cazul unui sistem dinamic neliniar, neted caracterizat prin sistemul de ecuatii diferentiale
ordinare: nn RRtxftx →= :))(()( (23)
unde f() reprezinta un n - vector functie a carei componente sunt functiuni continue admitand derivate partiale in
raport cu toate argumentele.
Punctele *x pentru care ( )* 0f x = poarta numele de puncte critice (puncte de echilibru sau puncte
fixe). Punctele nx R cu ( ) 0f x sunt definite ca puncte regulate.
Comportarea sistemului dinamic, in vecinatatea punctelor critice ce pot constitui eventuale puncte de
echilibru este deosebit de interesanta.
In continuare este interesant de apreciat in ce masura comportarea sistemului liniarizat in prima
aproximare poate fi concludent cu comportarea sistemului neliniar initial evident intr-o vecinatate a punctului
critic analizat.
Pentru sistemul dinamic (23) consideram *x punct critic. Daca notam
*x x = − , dezvoltam in
serie Taylor functiile ( )if x in jurul lui *x obtinem:
= A + () (24)
in care matricea A Rnxn reprezinta matricea sistemului liniarizat in prima aproximare
(t)= A(t) (25)
=
n
nnn
n
n
dx
df
dx
df
dx
df
dx
df
dx
df
dx
df
dx
df
dx
df
dx
df
A
...
......
...
...
21
2
2
2
1
2
1
2
1
1
1
si 0)(
lim =→
g
o (26)
Spunem ca punctul critic x* este punct critic simplu daca (A) {o} = , prin urmare daca det A 0.
Mai general, punctul critic x* este un punct hiperbolic daca matricea A nu are valori proprii situate pe
axa imaginara deci i(A) i1,n, Re(i) 0.
Urmatoarea teorema precizeaza conditiile in care analiza efectuata pe sistemul liniarizat este
concludenta in raport cu sistemul neliniar initial, in vecinatatea unui punct critic.
Teorema (Teorema de liniarizare)
Fie sistemul dinamic liniar ( )x f x= care admit x* punct critic hiperbolic (presupus in origine pentru
simplificarea enuntului). In aceste conditii intr-o vecinatate u Rn a punctului de echilibru x* portretul de stare
al sistemului neliniar coincide cu partea liniarizata ( )x Ax t= .

17
Pe cat de dificila este demonstrarea acestei teoreme fara a oferi elemente suplimentare legate de
obiectivele propuse de aceasta lucrare, pe atat de simpla si utila se dovedeste in aplicatii.
In esenta teorema afirma ca pentru puncte critice hiperbolice comportarea sistemului liniarizat intr-o
vecinatate a acestor puncte este identica cu cea a sistemului neliniar.
Prin urmare comportarea de nod, focar sau sa in liniar se determina cu un comportament similar in
neliniar. Punctele non hiperbolice constituie exceptia Re i=0 si in acest sens punctele hiperbolice se mai
numesc generice.
In cazul sistemelor non hiperbolice, aprecierea comportarii sistemului neliniar pe baza comportarii
sistemului liniarizat nu este posibila datorita lipsei stabilitatii structurale.
Daca in cazul punctelor hiperbolice, o perturbatie parametrica modifica locatia valorilor proprii ale
matricei A in baza continuitatii dependentei valorilor proprii de parametrii putem determina o vecinatate pentru
care conditia Re i 0 se mentine.
In cazul punctelor critice non hiperbolice, o mica variatie parametrica poate determina o modificare a
conditiei Re i = 0 in Re i > 0 (sau Re i < 0), ceea ce schimba literalmente evolutia in jurul acestei liniaritati.
Exemplu
Consideram sistemul dinamic neliniar:
+=+=
+−=
2
2
2
1
2
2
2
12
1
2
21
xxcurxrxx
xrxx
(27)
in care particularizand = +1 sau = -1 obtinem doua sisteme dinamice neliniare total diferite. Evident, originea
axelor (x1 = 0, x2 = 0) este un punct critic al sistemului (30).
Matricea ce evidentiaza partea liniarizata a sistemului
−=
++
+−+=
== 01
10
3221
212
00
2
2
2
121
21
2
2
2
1
2
1xxxxxx
xxxxA
(28)
Sistemul liniarizat este acelasi independent de valorile lui .
Valorile proprii ale matricei X sunt 1,2 = i, ceea ce in cadrul liniar indica ca originea se constituie in
centru. Reluand analiza sistemului neliniar, introducem o schimbare de coordonate in forma:
=
=
sin
cos
2
1
rx
rx (29)
pentru care evident 22
2
2
1 rxx =+
rrxxdt
d=+ 22
2
2
1 2)( (30)
si operand elementar obtinem:
1
2
x
xtg = (34)
Din (34), derivand in raport de timp in ambele parti, tinand cont de (27) obtinem:
1)( =t
Prin urmare in functie de valorile lui , obtinem doua sisteme dinamice neliniare:
=
=
1)(
0)( 2
t
rtr
si
=
−=
1)(
)( 2
t
rtr
In ambele cazuri (t) = t + 0.
Pentru cazul 02 = rdt
dr r(t) creste in timp iar pentru 02 = rdt
dr, r(t) descreste si evolueaza
asimptotic in zero.
Prin urmare in primul caz evolutia se face pe o spirala divergenta ier in cel de al doilea caz pe o spirala
convergenta. Rezultatul obtinut este conform teoremei de liniarizare, originea fiind un punct non hiperbolic.

18
In continuare vom prezenta cateva modele utilizate in caracterizarea unor procese socio - economice
pentru care teorema de liniarizare prezentata permite o analiza calitativa extrem de interesanta privind
comportarea in apropierea punctelor de echilibru.
a) Modelul Volterra pentru caracterizarea evolutiei dinamice intr-un model de tip concurential
Modelele de tip concurential au fost introduse pentru prima data in legatura cu studiul unor colectivitati
biologice, deci cu populatii de vietuitoare de diferite specii care coabiteaza intr-un acelasi mediu in conditii de
concurenta sau asociere. Modelele elaborate evidentiaza interactiunea dintre specii ce compun ecosistemul
analizat precum si interactiunea fata de mediu. Modelul Volterra de tip prada - pradator pe care il vom analiza in
continuare este considerat ca primul model matematic utilizat in biologie si totodata una dintre cele mai
frumoase lucrari legate de analiza colectiva a comportarii sistemelor dinamice neliniare.
Pentru o mai buna intelegere a modelului Volterra vom introduce cateva idei fundamentale pentru cazul
trivial ce ia in considerarea numai un singur tip de indivizi.
Vom considera N(t) numarul indivizilor din specia considerata la un moment t de timp.
In ipoteza in care rata natalitatii si a mortalitatii se mentin constante, cresterea populatiei respecta
modelul Malthus in forma:
)()(
tNdt
tdN= (34)
si pentru care, evolutia demografica se obtine imediat in forma:
N(t) = N(t0) et (35)
in care N(t0) reprezinta numarul de indivizi la momentul t0 de initializare a analizei.
Pentru o analiza mai apropiata de conditiile de evolutie, este necesar ca partea dreapta sa fie completata
cu o serie de termeni ce remarca factori suplimentari ce influenteaza cresterea demografica.
Conform modelului Malthus este normal ca coeficientul de crestere sa nu fie constant ca descrescator
in raport cu numarul indivizilor marcand prin aceasta ca resursele de hrana necesare dezvoltarii populatiei
considerate sunt limitate.
O asemenea evolutie, impune modelul Ferhűlst in forma:
)())(()(
tNtNdt
tdN−= (36)
in care , sunt constante.
In aceste conditii (-N(t)) reprezinta un coeficient de crestere iar coeficientul de autocrestere a
populatiei.
Solutia ecuatiei diferentiale este imediata:
( )0
)(tt
cetN
−−+
=
(37)
unde )(
)(
0tN
tNc
−= , N(t0) reprezentand numarul de indivizi la momentul initializarii analizei.
Evolutia temporala se face dupa o curba logistica, des intalnita in dinamica sistemelor socio -
economice.
Pentru o analiza si mai riguroasa este necesar ca partea dreapta a ecuatiei (34) sa contina termeni
suplimentari.
Astfel pe un caz complex, ecuatia de dinamica a unei populatii capata forma:
+
−−+−= )()()(sin)()(
0
tNdtfNtktNdt
tdNt
(38)
Ecuatia integro - diferentiala pune in evidenta un coeficient echivalent de crestere a populatiei format
din coeficientul de autocrestere plus inca trei termeni suplimentari: N, pune in evidenta efectul concurential
intre indivizii aceleiasi specii; un termen perioadic ce remarca o variatie sezoniera a conditiilor de dezvoltare; in
sfarsit, cel de al treilea termen pune in evidenta efectele evolutiilor anterioare (spre exemplu poluarea mediului).

19
In sfarsit, ultimul termen (considerat constant) este legat de fenomenul de imigratie. V. Volterra pune in
evidenta modele similare dar destinate analizei unei asociatii de 2, 3, … , n ecuatii diferentiale sau integro -
diferentiale.
Prezentam in continuare, un prim model ce caracterizeaza modelul de dezvoltare a populatiei pentru
doua specii ce convietuiesc intr-un habitat complet izolat. Indivizii din prima specie pe care ii vom numi "jertfe",
se dezvolta natural, hrana fiind oferita de mediu in mod nelimitat.
Indivizii din cea de a doua specie, se hranesc cu indivizi din prima specie si deci existenta lor este
conditionata de indivizii primei specii.
Din acest motiv vor fi denumiti "rapitori". Dinamica celor doua populatii, caracterizate prin numarul de
indivizi n1(t) si n2(t) va fi caracterizata de sistemul de ecuatii diferentiale neliniare:
( )
( )
11 1 2 1
22 2 1 2
( )( ) ( ) ( )
( )( ) ( )( )
dn tjertfa n t n tdt
dn tn t n trapitor
dt
= −
= − +
(39)
Prima ecuatie indica o crestere naturala a numarului de indivizi 1n1(t) insotita de o descrestere a
numarului de indivizi prin numarul indivizilor mancati de cea de a doua specie si care este proportional cu
numarul "intalnirilor" dintre indivizi din specii diferite (-n1(t)n2(t)). Cea de a doua ecuatie indica faptul ca cea
de a doua specie descreste constant pana la disparitie pentru cazul absentei hranei (pentru n1(t) = 0, 2
2 ndt
dn−= )
compensata de o crestere in cazul existentei hranei care normal va fi proportionala cu numarul de intalniri dintre
specii diferite (2n1(t)n2(t)).
Vom nota functiile din membrul drept al sistemului (39):
( )
( )
+−=
−=
2122212
1211211
),(
),(
nnnnf
nnnnf
(40)
Punctele singulare, ce constituie ecuatiile functie de echilibru se obtine solutionand sistemul de ecuatii
algebrice
( )
( )
=+−=
=−=
0),(
0),(
2122212
1211211
nnnnf
nnnnf
(41)
Obtinem elementar doua solutii:
( ) 2 11 2
2 1
0,0 ( , )O si A n n
= =
Matricea de analiza in prima aproximare a sistemului se obtine in forma:
+−
−−=
=12221
11211
2
2
1
2
2
1
1
1
21 ),(nn
nn
n
f
n
f
n
f
n
f
nnI
(42)
Matricele de liniarizare asociate functiilor singulare remarcate vor fi:
====
2
1
2110
0)0,0(
nnIA (43)
si

20
−
====
0
0
),(
1
1
2
2
2
1
1
12
2
212
nnIA (44)
Valorile proprii ale matricei A1 sunt 1 > 0 si -2 < 0 ceea ce indica faptul, ca in vecinatatea originii
evolutia va fi tipica pentru un punct sa.
Cea de a doua matrice, ce caracterizeaza functionarea in vecinatatea punctului critic
1
1
2
2 ,
are
valorile proprii 21j (punctul critic considerat este un punct non hiperbolic).
Singularitatea este de tip centru, remarcand in vecinatatea acestui punct in regim periodic.
Calitativ, traiectoriile de stare sunt prezentate in figura 3.
Fig. 3
Evolutia ansamblului celor doua populatii releva:
i) pentru o initializare in apropierea originii, se dezvolta exponential la =→
)(lim 1 tnt
in timp ce
0)(lim 2 =→
tnt
.
ii) in cazul unei initializari in apropierea celei de a doua initializari, evolutia este periodica cu
perioada
21
2
=T . Valoarea medie pe o perioada pentru fiecare populatie coincide cu
valoarea de echilibru ideal
2
21
=n si
1
12
=n .
Daca in cadrul exemplului analizat consideram ca speciile analizate sunt pasti ce coabiteaza in acelasi
mediu, in cazul in care pescuitul se intensifica valorile coeficientilor de autocrestere se modifica in sensul ca 1
scade iar 2 creste (se considera ca cantitatea de peste prins este proportionala cu numarul de indivizi din fiecare
specie).
In aceste conditii, valorile medii se modifica corespunzator in sensul ca n1 creste iar n2 scade. Un
asemenea rezultat a fost pus in evidenta de biologul d'Ancona printr-un studiu statistic asupra cantitatilor de
peste pescuit in perioada 1903 - 1923.
n2 =
1
1
n2 =
2
2
O (0,0) n1
n2

21
In timpul primului razboi mondial 1914 - 1918, intensitatea pescuitului s-a diminuat ca urmare a
faptului ca tinerii pescari au fost concentrati.
Inregistrarile statistice indica faptul ca numarul rapitorilor a crescut in timp ce numarul de indivizi a
scazut, rezultand conform cu analiza prezentata anterior.
Fara a intra in detalii, precizam ca evolutia de tip (34) este de tip conservativ iar evolutia de tip (36) este
de tip disipativ.
Pa de alta parte, modelul (39) pune in evidenta posibilitatea realizarii unei analogii extrem de
interesante intre asociatiile de tip concurential si sistemele mecanice.
Din (39), eliminand factorii ce pun in evidenta competitia intre cele doua ecuatii obtinem:
02121212112 =+−+ nnnn (45)
Integrand in ambele parti, pentru o initializare t0 = 0 obtinem:
constHdttndttntntntt
==+−+ 0212
01212112 )()()()( (46)
unde
( ) ( )2 1 1 10 0H n n = +
Introducem urmatoarele notatii:
==tt
dttntydttntx0
20
1 )()(,)()( (47)
denumiti cantitatea de viata pentru cele doua populatii.
In baza relatiei (46), cu notatiile (47) obtinem legea conservarii energiei demografice in forma:
T V H+ = (48)
in care
( ) ( )2 1T x t y t = +
reprezinta energia demografica cinetica iar
( ) ( )1 2 1 1x t y t V − + =
reprezinta energia potentiala demografica.
Mai mult, daca introducem functia:
( ) Vyxyxyyxx −−+
+=
2
1log
1log
1
21 (49)
se poate demonstra, ca sistemul ce caracterizeaza dinamica asociatiei considerate poate fi caracterizata de
ecuatiile Lagrange:
=
−
=
−
0
0
dyydt
d
dxxdt
d
(50)
Rezulta ca dinamica celor doua populatii n1(t) si n2(t) poate fi descrisa prin principiul variational in
forma:
=t
tdtt
0
0)( (51)

22
TEORIA STABILITATII IN SENS POPOV
Una dintre problemele de baza impuse de studiul sistemelor automate neliniare este
problema stabilitatii. Elementele teoretice fundamentale prezinta stabilitatea sistemelor
neliniare au fost fundamentate de A.M. Liapunov in lucrarea de referinta “Problema generala
a satbilitatii miscarii”. Legat de problema stabilitatii exista mai multe moduri de definire si
abordare: stabilitatea tehnica sau practica (stabilitatea pe un interval de timp finit), stabilitatea
Lagrange, hipersatbilitatea. Dintre aceste metode de abordare se impune ca problema de
interes major problema stabilitatii asimptotice in sens Liapunov, care sta la baza teoriei
stabilitatii absolute.
In anul 1959, savantul roman V.M. Popov a demonstrat posibilitatea abordarii
stabilitatii absolute a sistemelor neliniare prin tehnici frecventiale. Elementele teoretice
dezvoltate au fost sintetizate intr-un criteriu aplicativ cunoscut sub denumirea de “criteriul
Popov”.
In continuare vom prezenta sintetic cateva notiuni legate de stabilitatea absoluta
abordata prin tehnici de frecventa si vom prezenta o serie de aplicatii solutionate cu criteriul
Popov.
1. Criteriul Popov pentru sisteme cu partea liniara stabila.
Consideram cazul unui sistem neliniar de reglare automata a carui schema bloc este
prezentata in figura1.
0=refy u( )sH( )f
+
−
y
Fig. 1 - Schema bloc a sistemului neliniar.
La nivel de stare, sistemul va fi caracterizat in forma:
( ) ( ) ( )
( ) ( ) ( )
( ) ( )( )tftu
ttxcty
tubtxAtx
T
=
−==
+=
(1)
in care nnRA - matrice reala constanta
1, nRcb - vectori constanti
( )f - este o functie reala, scalara, continua sau discontinua, cu variabila scalara .
Pentru inceput, se considera cazul in care A este o matrice hurwitziana sau echivalent
functia de transfer a sistemului liniar
( ) ( ) bAIscsH T −=−1
(2)
are polii situati in semiplanul stang
( ) − CsHP (3)

23
Ipoteza de baza asupra dependentei neliniare este o conditie sectoriala impusa functiei
f(x), in sensul ca in puncatele de continuitate si pentru 0,x
( )00
f xK
x (4)
( )xfy =
x
xKy = 0
Inegalitatea (4) impune ca
graficul functiei y = f(x) sa fie
cuprins in sectorul:
00y K x cu K K=
Nu se exclude cazul in care
0K = si pentru care 0
10.K =
Fig. 2 - Graficul unei functii sectoriale
Vom defini 0KA clasa functiilor cu aceasta proprietate.In aceste ipoteze putem formula
urmatorul criteriu de stabilitate.
Teorema Popov (pentru parte liniara stabila).
Sistemul neliniar (1) este absolut stabil pentru oricare neliniaritate 0KAf daca
pentru un q real dat si oricare 0 are loc inegalitatea
( ) ( ) 0
1Re 1 0j q H j
K + + (5)
Vom prezenta in continuare cateva consideratii geometrice simple legate de criteriul
prezentat si care se vor dovedi extreme de utile in aplicatii.
Vom considera functia de transfer a partii liniare
( ) ( ) ( ) ( ) VjUsHjH js +== = (6)
Introducem caracteristica de transfer modificata si notam
( ) ( ) ( ) ( ) VVUU ==~
,~
(7)
Cu notatiile introduse
( ) ( ) ( )( ) ( ) ( ) VqUVjUqj −=++1Re (8)
iar inegalitatea (5) poate fi scrisa in forma

24
( ) ( ) 01~~
0
+−K
VqU
(9)
In planul ( )VU~
,~
construim dreapta Popov
0~~1
0
=−+ VqUK
(10)
qarctg
1=
0
1~
KU t −= U
~
V~
Fig. 3 - Graficul dreptei Popov
care are panta 1
q si abscisa la origine
0
1~
KU t −= .
Dreapta Popov (10) si caracteristica de transfer modificata (7) va avea urmatoarele
proprietati:
• Caracteristica de transfer modificata se afla in semiplanul drept delimitat de
dreapta Popov
• Abscisa punctului de intersectie 0V = cu dreapta P, tU~
, este nepozitiva
( )00 K deoarece pentru 0
0
10, 0K
K − si daca 0K = atunci .0
1
0
=K
• Valoarea lui tU~
este cu atat mai mare (in sensul apropierii fata de centrul axelor de
coordonate ) cu cat K0 este mai mare si prin urmare avem un sector mai larg. Prin
urmare este dorit ca tU~
sa fie cat mai mare.
• Panta dreptei Popov este 1
q; pentru q = 0 panta dreptei este infinita, pentru q > 0
panta este pozitiva iar pentru q<0 panta este negativa.
Dupa cum am prezentat anterior, un rol important in aprecierea stabilitatii il joaca
carcateristica de transfer modificata ;
( ) ( ) ( ) ( ),U U V V = =
unde
( ) ( ) = jHU Re si ( ) ( ) = jHV Im

25
Exemplu
Sa se construiasca hodograful modificat pentru un sistem cu functia de transfer
( )1+
=sT
KsH
( ) 2 2 2 21 1 1
K K KTH j j
j T T T
= = −
+ + + (11)
Prin urmare:
( ) ( ) ( ) ( )22
2
22 1
~;
1
~
T
KTVV
T
KUU
+−==
+== (12)
Prin calculul direct, se verifica KVTU =−~~
si prin urmare caracteristica de transfer
modificata este o dreapta ce trece prin punctele ( )0~
,~
== VKU si
−==
T
KVU~
,0~
( )V
( )U
0==
( )U~
( )V~
K
T
K=
a) b)
Fig. 4 - Hodograful si hodograful modificat pentru sistemul ( )1+
=sT
KsH
In figura (4a) este prezentata caracteristica Nyquist (semicerc cu centru
0,
2
K si raza
)2
K iar in figura (2b) caracteristica de frecventa modificata
2. Teorema Popov pentru cazul partii liniare instabile.
In continuare vom analiza cazul in care conditia de stabilitate impusa partii liniare nu
este respectata deci pentru care ( ) − CsHP .
( ) 0tyref ( )f
r
( )sH
r
( )ty+ + +
− − −
Fig. 5 - Schema de calcul modificata pentru cazul partii liniare instabile

26
Pentru a face posibila analiza in continuare se propune urmatoarea schema de calcul
modificata (vezi figura 5).
Astfel blocul liniar cu functia de transfer ( )sH este inconjurat printr-o reactie negativa
de coeficient r astfel aleasa incat partea liniara modificata ( )sH m caracterizata prin functia de
transfer ( )( )
( )sHr
sHsH m
+=
1 sa fie stabila, adica ( ) − CsHP m .
Pentru ca functionalitatea schemei sa nu fie afectata se va introduce o legatura paralel
inainte care inconjoara blocul neliniar. In acest caz furma neliniaritatii se modifica
corespunzator si devine ( ) ( ) −= rffm .
Atragem atentia ca analiza este facuta in situatia unui exogen complet absent ; in caz
contrar trebui efectuate modificari asupra semnalelor externe pentru a compatibiliza
functionarea celor doua scheme.
In aceste conditii vom continua analiza pe o schema modificata ca cea prezentata in
figura 6.
( ) 0tyref ( )mf ( )sH m
( )ty+
−
Fig. 6 - Scheme echivalenta modificata.
Neliniaritatea echivalenta astfel introdusa trebuie sa satisfaca urmatoarele conditii:
( )
( )
( )
=
=
0
0
00
dxxf
f
f
m
m
m
(13)
Astfel criteriul de stabilitate absoluta a starii de echilibru ( criteriul V.M.Popov) este:
pentru stabilitatea absoluta a starii de echilibru a sistemului de reglare automata prezentata
in figura 5 format din elementul neliniar ( )mf ce satisface conditiile (13) si sistemul liniar
modificat stabil ( )sH m este suficient ca pentru un 0k sa existe Rq incit pentru oricare
0 sa fie satisfacuta inegalitatea
( ) ( ) 01
1Re
++
kjHqj m (14)
relatie in care
( ) ( ) ( ) ( ) mmjsmm VjUsHjH~~+== = (15)
Exemplu
Consideram sistemul dinamic neliniar avand partea liniara caracterizata prin functia de
transfer ( )54
22 −−
+=
ss
ssH . Partea liniara este instabila fiind caracterizata prin polii
.1,52,1 −=s
27
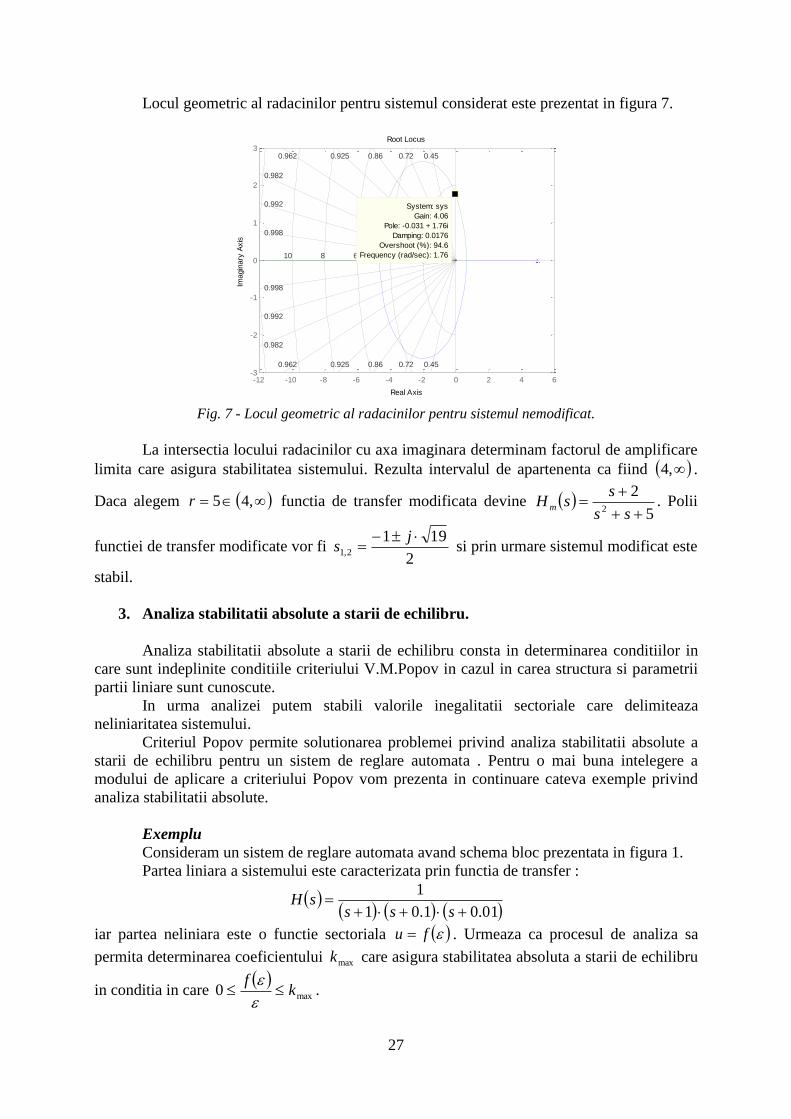
Locul geometric al radacinilor pentru sistemul considerat este prezentat in figura 7.
-12 -10 -8 -6 -4 -2 0 2 4 6-3
-2
-1
0
1
2
30.450.720.860.9250.962
0.982
0.992
0.998
0.450.720.860.9250.962
0.982
0.992
0.998
24681012
System: sys
Gain: 4.06
Pole: -0.031 + 1.76i
Damping: 0.0176
Overshoot (%): 94.6
Frequency (rad/sec): 1.76
Root Locus
Real Axis
Imagin
ary
Axis
Fig. 7 - Locul geometric al radacinilor pentru sistemul nemodificat.
La intersectia locului radacinilor cu axa imaginara determinam factorul de amplificare
limita care asigura stabilitatea sistemului. Rezulta intervalul de apartenenta ca fiind ( ),4 .
Daca alegem ( )= ,45r functia de transfer modificata devine ( )5
22 ++
+=
ss
ssH m . Polii
functiei de transfer modificate vor fi 2
1912,1
−=
js si prin urmare sistemul modificat este
stabil.
3. Analiza stabilitatii absolute a starii de echilibru.
Analiza stabilitatii absolute a starii de echilibru consta in determinarea conditiilor in
care sunt indeplinite conditiile criteriului V.M.Popov in cazul in carea structura si parametrii
partii liniare sunt cunoscute.
In urma analizei putem stabili valorile inegalitatii sectoriale care delimiteaza
neliniaritatea sistemului.
Criteriul Popov permite solutionarea problemei privind analiza stabilitatii absolute a
starii de echilibru pentru un sistem de reglare automata . Pentru o mai buna intelegere a
modului de aplicare a criteriului Popov vom prezenta in continuare cateva exemple privind
analiza stabilitatii absolute.
Exemplu
Consideram un sistem de reglare automata avand schema bloc prezentata in figura 1.
Partea liniara a sistemului este caracterizata prin functia de transfer :
( )( ) ( ) ( )01.01.01
1
+++=
ssssH
iar partea neliniara este o functie sectoriala ( )fu = . Urmeaza ca procesul de analiza sa
permita determinarea coeficientului maxk care asigura stabilitatea absoluta a starii de echilibru
in conditia in care ( )
max0 kf
.
28
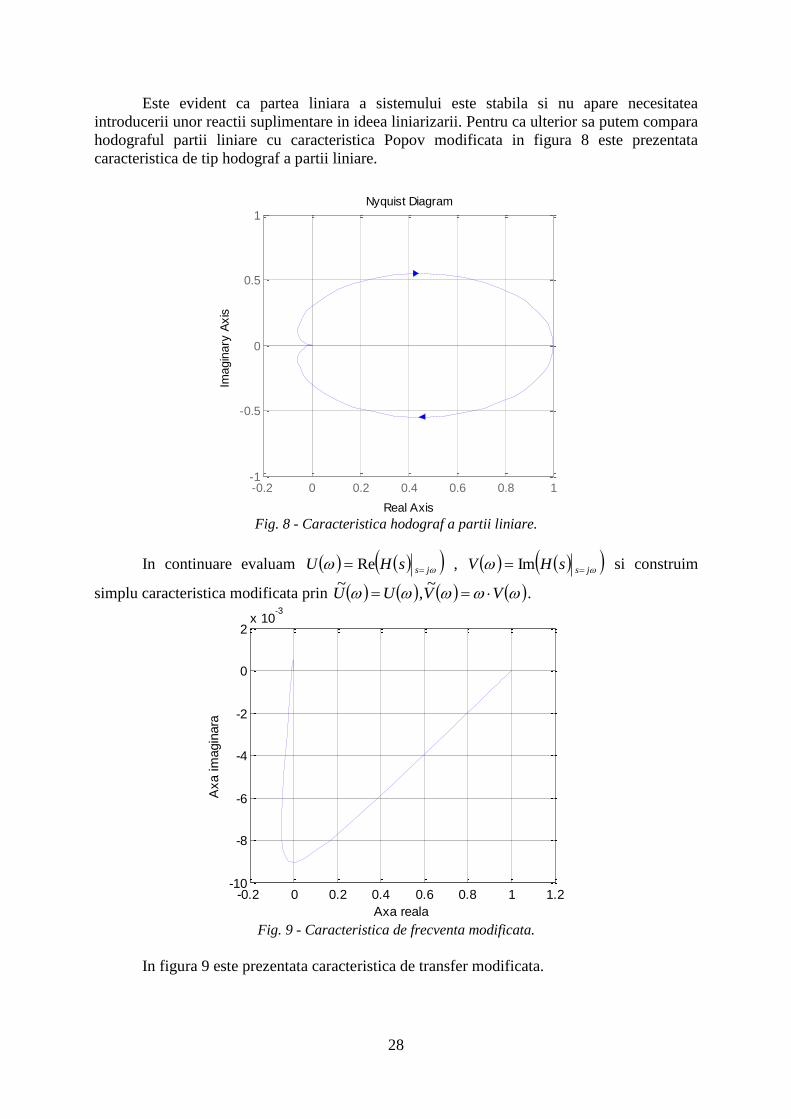
Este evident ca partea liniara a sistemului este stabila si nu apare necesitatea
introducerii unor reactii suplimentare in ideea liniarizarii. Pentru ca ulterior sa putem compara
hodograful partii liniare cu caracteristica Popov modificata in figura 8 este prezentata
caracteristica de tip hodograf a partii liniare.
-0.2 0 0.2 0.4 0.6 0.8 1-1
-0.5
0
0.5
1
Nyquist Diagram
Real Axis
Imagin
ary
Axis
Fig. 8 - Caracteristica hodograf a partii liniare.
In continuare evaluam ( ) ( )( ) jssHU == Re , ( ) ( )( ) jssHV == Im si construim
simplu caracteristica modificata prin ( ) ( ) ( ) ( ) VVUU ==~
,~
.
-0.2 0 0.2 0.4 0.6 0.8 1 1.2-10
-8
-6
-4
-2
0
2x 10
-3
Axa reala
Axa im
agin
ara
Fig. 9 - Caracteristica de frecventa modificata.
In figura 9 este prezentata caracteristica de transfer modificata.
29
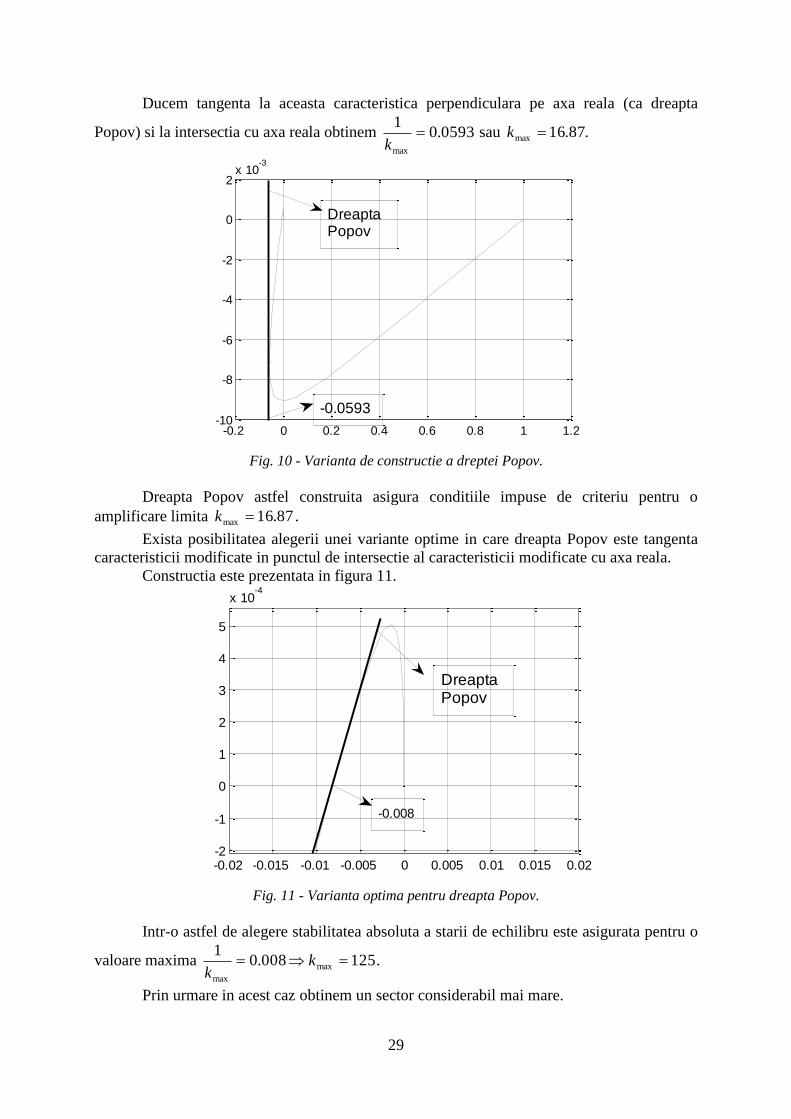
Ducem tangenta la aceasta caracteristica perpendiculara pe axa reala (ca dreapta
Popov) si la intersectia cu axa reala obtinem 0593.01
max
=k
sau .87.16max =k
-0.2 0 0.2 0.4 0.6 0.8 1 1.2-10
-8
-6
-4
-2
0
2x 10
-3
DreaptaPopov
-0.0593
Fig. 10 - Varianta de constructie a dreptei Popov.
Dreapta Popov astfel construita asigura conditiile impuse de criteriu pentru o
amplificare limita 87.16max =k .
Exista posibilitatea alegerii unei variante optime in care dreapta Popov este tangenta
caracteristicii modificate in punctul de intersectie al caracteristicii modificate cu axa reala.
Constructia este prezentata in figura 11.
-0.02 -0.015 -0.01 -0.005 0 0.005 0.01 0.015 0.02-2
-1
0
1
2
3
4
5
x 10-4
-0.008
DreaptaPopov
Fig. 11 - Varianta optima pentru dreapta Popov.
Intr-o astfel de alegere stabilitatea absoluta a starii de echilibru este asigurata pentru o
valoare maxima 125008.01
max
max
== kk
.
Prin urmare in acest caz obtinem un sector considerabil mai mare.
30
Desi procedura de constructie a dreptei Popov este principial simpla, necesitatea
evaluarilor prin proceduri grafice pe o curba profund neliniara complica foarte mult evaluarea
solutiei finale. In acest context au fost elaborate mai multe programe pentru evaluarea
conditiilor in care sunt satisfacute conditiile criteriului Popov.
Matlab dispune de o subrutina de acest gen : subrutina POPOV.m. In configuratia cea
mai simpla sintaxa este ),,( minmax kdennumpopovk = care intoarce valoarea maxima a unui
sector marginit inferior de mink , pentru cazul unui sistem liniar caracterizat prin numarator si
numitor.
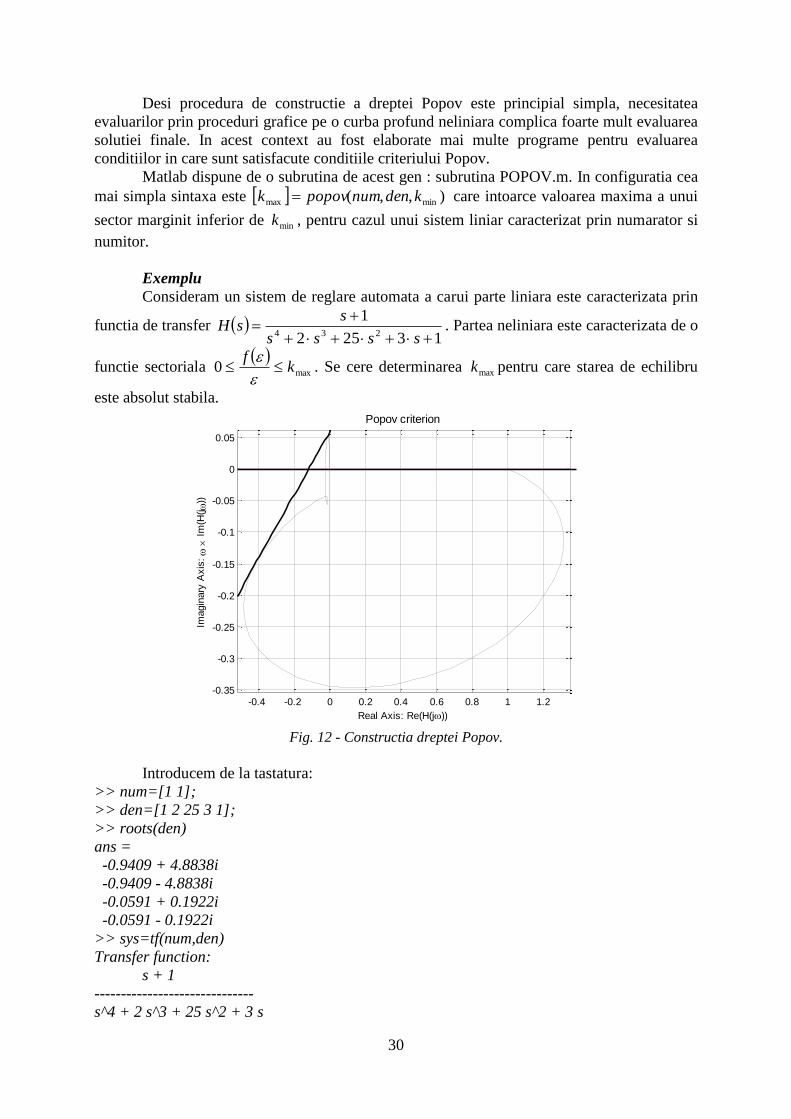
Exemplu
Consideram un sistem de reglare automata a carui parte liniara este caracterizata prin
functia de transfer ( )13252
1234 ++++
+=
ssss
ssH . Partea neliniara este caracterizata de o
functie sectoriala ( )
max0 kf
. Se cere determinarea maxk pentru care starea de echilibru
este absolut stabila.
-0.4 -0.2 0 0.2 0.4 0.6 0.8 1 1.2-0.35
-0.3
-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
Popov criterion
Real Axis: Re(H(j))
Imagin
ary
Axis
:
I
m(H
(j ))
Fig. 12 - Constructia dreptei Popov.
Introducem de la tastatura:
>> num=[1 1];
>> den=[1 2 25 3 1];
>> roots(den)
ans =
-0.9409 + 4.8838i
-0.9409 - 4.8838i
-0.0591 + 0.1922i
-0.0591 - 0.1922i
>> sys=tf(num,den)
Transfer function:
s + 1
------------------------------
s^4 + 2 s^3 + 25 s^2 + 3 s

31
Polii sistemului liniar sunt in semiplanul stang si prin urmare sistemul liniar este
stabil; apelam subrutina popov.
>> popov(num,den,0)
Popov criterion is satisfied
maximum sector bound F_max = 8.4706
si obtinem 4706.8max =k .
Exemplu
Consideram sistemul de reglare automata neliniar caracterizat printr-o parte liniara cu
functia de transfer ( )127117
1234 −=++
+=
ssss
ssH si o parte neliniara cu o neliniaritate
statica sectoriala ( )
maxmin kf
k
. Se cere determinarea valorilor maxmin ,kk pentru
asigurarea stabilitatii absolute pentru starea de echilibru.
Introducem structura sistemului
>> num=[1 1];
>> den=conv([1 0 -1],[1 7 12])
>> sys=tf(num,den)
Transfer function:
s + 1
-------------------------------
s^4 + 7 s^3 + 11 s^2 - 7 s - 12
>> roots(den)
ans =
-4.0000
-3.0000
1.0000
-1.0000
Sistemul liniar este instabil si prin urmare este necesara introducerea unei corectii r
stabilizatoare.
Construim locul radacinilor
>> rlocus(sys)
-12 -10 -8 -6 -4 -2 0 2 4-8
-6
-4
-2
0
2
4
6
8
System: sys
Gain: 12.2
Pole: -0.0379
Damping: 1
Overshoot (%): 0
Frequency (rad/sec): 0.0379
System: sys
Gain: 38.4
Pole: -0.038 + 2.11i
Damping: 0.018
Overshoot (%): 94.5
Frequency (rad/sec): 2.11
Root Locus
Real Axis
Imagin
ary
Axis
Fig. 13 - Locul geometric al radacinilor pentru sistemul din exemplu
32
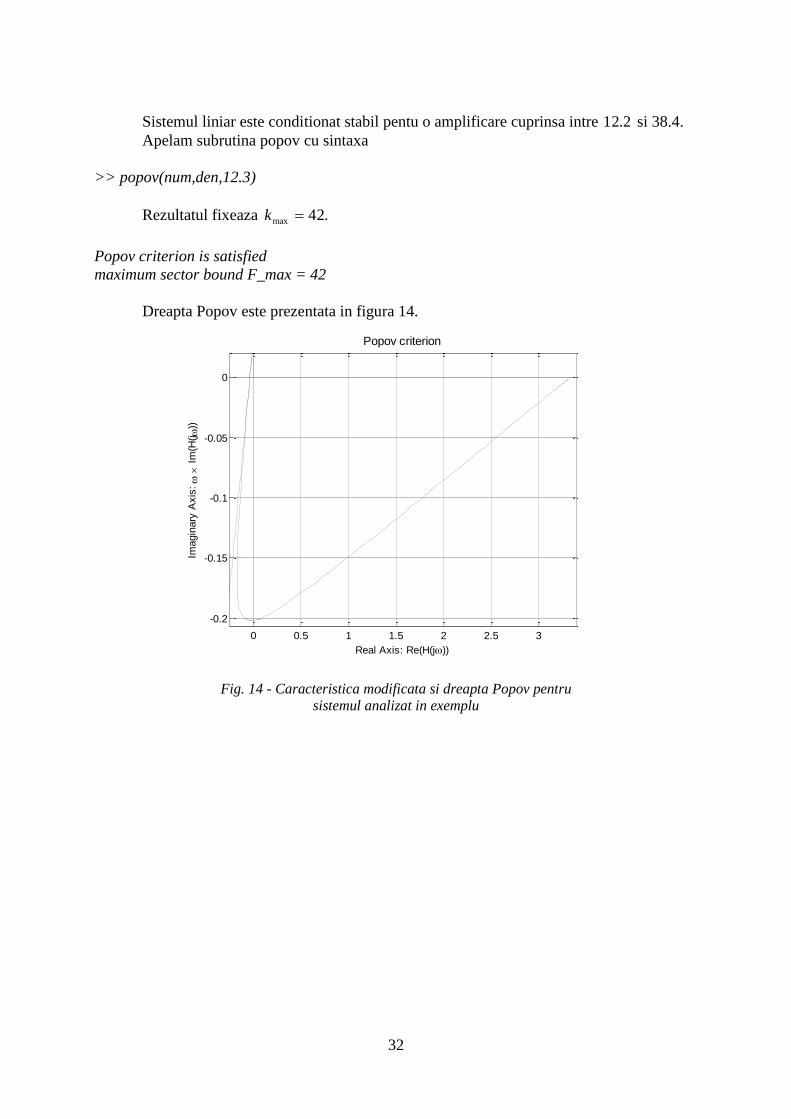
Sistemul liniar este conditionat stabil pentu o amplificare cuprinsa intre 2.12 si 38.4.
Apelam subrutina popov cu sintaxa
>> popov(num,den,12.3)
Rezultatul fixeaza .42max =k
Popov criterion is satisfied
maximum sector bound F_max = 42
Dreapta Popov este prezentata in figura 14.
0 0.5 1 1.5 2 2.5 3
-0.2
-0.15
-0.1
-0.05
0
Popov criterion
Real Axis: Re(H(j))
Imagin
ary
Axis
:
I
m(H
(j ))
Fig. 14 - Caracteristica modificata si dreapta Popov pentru
sistemul analizat in exemplu