METODE ASIMPTOTICE S˘I NUMERICE ^IN STUDIUL ARIPII...
37
Universitatea din Bucure¸ sti METODE ASIMPTOTICE S ¸I NUMERICE ˆ IN STUDIUL ARIPII PORTANTE ˆ IN CURENT SUBSONIC Tezˇ a de doctorat Coordonator ¸ stiint ¸ific: Adrian STOICA Prof. dr. Sanda T ¸ IGOIU septembrie 2015
Transcript of METODE ASIMPTOTICE S˘I NUMERICE ^IN STUDIUL ARIPII...

Universitatea din Bucuresti
METODE ASIMPTOTICE SI NUMERICE IN
STUDIUL ARIPII PORTANTE IN CURENT
SUBSONIC
Teza de doctorat
Coordonator stiintific:
Adrian STOICA Prof. dr. Sanda TIGOIU
septembrie 2015

Introducere
Scopul acestei lucrari este de a rafina metodele matematice de studiu ale miscarii in-
compresibile ın jurul aripilor planare si extinderea lor la cazul aripilor nonplanare. Daca
prin aripa portanta planara ıntelegem o suprafata ”putin” diferita de o suprafata plana,
care poate genera o forta de sustentatie, prin aripa nonplanara vom ıntelege o suprafata
”putin” diferita de o suprafata cilindrica avand generatoarea paralela cu directia curentului
neperturbat. In categoria aripilor nonplanare se ıncadreaza aripioarele(winglets), biplanele,
parasutele, aripile inelare. Unul din motivele importante pentru care sunt studiate aripile
nonplanare rezida ın faptul ca acestea au caracteristici aerodinamice, ın termeni de raport
ıntre coeficientul de rezistenta la ınaintare si patratul coeficientul de portanta, mai bune
decat aripile planare, cu alte cuvinte la anverguri si portante egale, exista aripi nonplanare
a caror rezistenta la ınaintare este mai mica decat cea a aripii planare de rezistenta minima.
S-a constatat experimental ca montarea cate unei aripioare avand forma unei spire(spiroid
winglet) la bordurile laterale ale aripilor unui avion Falcon 50, a condus la o micsorare a
coeficientului de rezistenta la ınaintare cu peste 11% cu consecinte proportionale ın ceea ce
priveste consumul de carburant.
Rezultatele originale din aceasta teza s-au concretizat prin publicarea sau trimiterea spre
publicare a 4 articole stiintifice ın reviste de specialitate:
1)A.Stoica, A Numerical Solution for the Lifting Surface Integral Equation, INCAS BUL-
LETIN, Volume 6, Special Issue 1/ 2014
2)A.Stoica, A rigorous derivation of certain equations arising in the lifting wing theory,
Bulletin Mathematique de la Societe des Sciences Mathematiques de Roumanie (trimis spre
publicare)
3)A.Stoica, An exact solution for the minimum induced drag of an circular arched wing
and the validation of a conjecture, Journal of Engineering Mathematics (trimis spre publi-
care)
1

4)A.Stoica, A singular integral equation for curved wings of high aspect ratio, Proc. Ro.
Acad. Series A (trimis spre publicare)
2

Capitolul 1
Miscarea ın jurul aripii portante
In primul capitol extindem la cazul aripii nonplanare metoda solutiilor fundamentale
ale sistemului aerodinamicii liniarizate, dezvoltata de Dragos si Homentcovschi ın [6], [7],
[9] pentru aripa planara. Prin aceasta metoda, care utilizeaza aparatul matematic al teoriei
distributiilor, se arata pe de o parte ca perturbatia este potentiala ın spatele aripii, exceptand
o suprafata plana (cilindrica ın cazul aripii nonplanare) care se ıntinde spre infinit aval pe
directia curentului neperturbat, iar pe de alta parte se determina perturbatia presiunii prin
intermediul unui produs de convolutie care reprezinta de fapt o superpozitie continua de
dublete avand ın fiecare punct directia data de normala la suprafata cilindrica de referinta
si intensitatea ın fiecare punct ca fiind diferenta f de presiune de pe extrados si intrados.
Lucrurile acestea doua se postuleaza ın cadrul teoriei clasice Multhopp [12], Ashley si Landahl
[1]. Am aflat de asemenea reprezentarea componentelor campului de viteze de perturbatie
si am calculat coeficientii aerodinamici cu ajutorul carora se determina actiunea fluidului
asupra aripii. Determinarea saltului de presiune f, atrage dupa sine cunoasterea miscarii
perturbate precum si caracteristicile aerodinamice ale aripii.
3

Se considera miscarea stationara a unui fluid incompresibil nevascos, in jurul unei aripi
fara grosime, de anvergura finita. La mari distante, ın amonte, miscarea este uniforma cu
viteza constanta V∞. Alegem un sistem cartezian ortogonal OXY Z si {O, i, j,k} reperul
asociat astfel ıncat axele OX si OZ coincid cu directia curentului neperturbat respectiv
directia portantei. Notam cu L0, V∞, p∞, ρ respectiv lungimea maxima a semicorzii aripii,
modulul vitezei, presiunea si densitatea fluidului la infinit amonte. De asemenea, vom nota
cu x, y, z coordonatele adimensionale, legate de cele cu dimensiune x1, y1, z1, prin relatiile
(x1, y1, z1) = L0(x, y, z). Daca nu se specifica altfel, peste tot ın acest capitol prezenta in-
dicelui inferior ”1” arata fie ca obiectele matematice sunt descrise ın raport cu variabilele cu
dimensiune sau ca marimile respective au dimensiune. Introducem perturbatiile adimension-
ale p si v ale presiunii si respectiv vitezei, legate de presiunea p1 si viteza v1 din miscarea
perturbata (ın raport cu miscarea uniforma), prin relatiile:
p1 = p∞ + ρV 2∞p, v1 = V∞(i + v). (1.1)
Facem urmatoarele ipoteze:
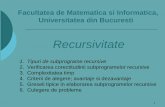
1.Geometria aripii(Figura 1.1)
Suprafata suport W a aripii este putin deviata fata de o suprafata cilindrica Σ, directia
generatoarei fiind cea a curentului neperturbat, iar curba directoare C, presupus a fi simpla,
neteda de clasa C2, regulata, situata ıntr-un plan perpendicular pe OX, este descrisa de
ecuatiile:
y = ys (η) , z = zs (η) , −θ ≤ η ≤ θ. (1.2)
Daca zs ≡ 0, suntem ın cazul clasic al aripii planare, ın caz contrar fiind vorba despre
aripa nonplanara. Aceasta ultima situatie corespunde aripii ınchise, daca C este o curba
inchisa. Notam cu S proiectia ortogonala a suprafetei W a aripii pe suprafata cilindrica Σ.
Pentru fiecare η ∈ [−θ, θ], desemnam prin x−(η) si x+(η) componenta dupa OX a punc-
tului situat pe bordul de atac, respectiv bordul de fuga. Ecuatiile care descriu suprafetele
W si S sunt:
W :
x = ξ
y = ys (η) + yε (ξ, η) , (ξ, η) ∈ D,z = zs (η) + zε (ξ, η)
(1.3)
4

Curba CProiectia
suprafetei W
Y
Z
(a) Proiectia aripii si a suprafetei de referinta Σpe planul Y OZ
X
Y
Bordul de atac
𝒙 = 𝒙−
Bordul de fugă
𝒙 = 𝒙+
(b) Proiectia aripii pe planul XOY
Figura 1.1: Geometria aripii
S :
x = ξ
y = ys (η) , (ξ, η) ∈ D,z = zs (η)
(1.4)
unde
D = {(ξ, η) | x− (η) ≤ ξ ≤ x+ (η) ,−θ ≤ η ≤ θ}, (1.5)
5

iar ε � 1 este un parametru cu ajutorul caruia descriem deviatia suprafetei W a aripii de
la suprafata cilindrica Σ.
Admitem ca x−, x+, yε si zε sunt functii netede astfel ıncat |yε| , |zε|,∣∣∣∣∂yε∂ξ
∣∣∣∣ , ∣∣∣∣∂yε∂η∣∣∣∣ , ∣∣∣∣∂zε∂ξ
∣∣∣∣ , ∣∣∣∣∂zε∂η∣∣∣∣
sunt de ordinul O(ε) pe D.
2. Ipoteza micilor perturbatii
Datele problemei ne permit sa admitem ipoteza micilor perturbatii |p| � 1, |v| � 1 ın tot
domeniul ocupat de fluid, mai mult presupunem ca perturbatia p a presiunii si componentele
u, v, w ale perturbatiei vitezei sunt de ordinul O(ε) si ca perturbatia dispare la infinit
lim v = 0, lim p = 0, cand ‖(x, y, z)‖ → ∞. (1.6)
3. Aripa portanta
Exista o diferenta ıntre presiunile de pe extradosul si intradosul aripii, astfel ca daca
notam cu p+ si p− valorile limita ale presiunii pe fata exterioara respectiv interioara a
suprafetei W, atunci
[[p]] = p+(x, y, z)− p−(x, y, z) = f(x, y, z), (∀)M(x, y, z) ∈ W. (1.7)
Ecuatiile de miscare liniarizate
In variabile adimensionale, dupa liniarizarea ın jurul miscarii neperturbate, ecuatia de
continuitate si ecuatia Euler pentru miscarea stationara formeaza sistemul de ecuatii al
aerodinamicii liniarizate stationare (Homentcovschi [9], Dragos [6]):
divv = 0,∂v
∂x+ gradp = 0.
(1.8)
Conditia de alunecare liniarizata:
y′
sw − z′
sv =∂zε∂ξ
y′
s −∂yε∂ξ
z′
s pe S. (1.9)
6

Ecuatia de salt liniarizata a perturbatiei presiunii se scrie:
[[p]] = p+(x, y, z)− p−(x, y, z) = f(x, y, z), (∀)M(x, y, z) ∈ S. (1.10)
Homentcovschi [9] a aratat ca daca S este o suprafata (solida) de discontinuitate a
campului de presiune, atunci sistemul ın distributii asociat sistemului aerodinamicii liniarizate
(1.8) si conditiei de salt (1.10) este:divv = 0∂v
∂x+ gradp = fδSn,
(1.11)
unde n = (nx, ny, nz) este versorul normalei exterioare la suprafata S, iar fδSn reprezinta
distributia de simplu strat pe suprafata S cu densitatea f . Aici nx=0.
Definitia 1. Solutiile ın distributii ale sistemuluidivv = 0∂v
∂x+ gradp = f
(1.12)
se numesc solutii fundamentale (Homentcovschi [9] si Dragos [6]) ale sistemului aerodina-
micii liniarizate.
Folosind solutia fundamentala a sistemului (1.12) (Dragos [7], Cap 2) pentru cazul ın
care f = fδSn obtinem ca
v = H(x) ∗ fδSn + gradϕ, (1.13)
unde H este distributia Heaviside, ϕ este potentialul perturbatiei vitezei,
ϕ (x, y, z) = − 1
4π
∫∫S
f (x1, y1, z1)(r− r1) · n1
(y − y1)2 + (z − z1)2
(1 +
x− x1|r− r1|
)dσ1, (1.14)
iar r = xi + yj + zk si r1 = x1i + y1j + z1k. Se observa din ecuatia (1.13), ca miscarea este
potentiala ın afara suprafetei Σ′ ⊂ Σ care pleaca de la bordul de atac si continua spre infinit
aval.
Teorema 1. Perturbatia miscarii uniforme, datorata prezentei aripii portante, este descrisa,
ın orice punct M(x, y, z) ∈ R3 \Σ′, prin campul de viteze v, de componente u = −p, iar v si
7

w definite prin (1.15) si respectiv (1.16). Distributia de presiune este definita prin formula
(1.17).
v (x, y, z) =− 1
4π
∫∫S
f (x1, y1, z1)n1y
(y − y1)2 + (z − z1)2
(1 +
x− x1|r− r1|
)dσ1
+1
2π
∫∫S
f (x1, y1, z1) (y − y1)2 n1y[(y − y1)2 + (z − z1)2
]2 (1 +x− x1|r− r1|
)dσ1
+1
2π
∫∫S
f (x1, y1, z1) (y − y1) (z − z1)n1z[(y − y1)2 + (z − z1)2
]2 (1 +
x− x1|r− r1|
)dσ1
+1
4π
∫∫S
f (x1, y1, z1) [(y − y1)n1y + (z − z1)n1z]
(y − y1)2 + (z − z1)2(x− x1) (y − y1)|r− r1|3
dσ1
(1.15)
w (x, y, z) =− 1
4π
∫∫S
f (x1, y1, z1)n1z
(y − y1)2 + (z − z1)2
(1 +
x− x1|r− r1|
)dσ1
+1
2π
∫∫S
f (x1, y1, z1) (z − z1)2 n1z[(y − y1)2 + (z − z1)2
]2 (1 +x− x1|r− r1|
)dσ1
+1
2π
∫∫S
f (x1, y1, z1) (y − y1) (z − z1)n1y[(y − y1)2 + (z − z1)2
]2 (1 +
x− x1|r− r1|
)dσ1
+1
4π
∫∫S
f (x1, y1, z1) [(y − y1)n1y + (z − z1)n1z]
(y − y1)2 + (z − z1)2(x− x1) (z − z1)|r− r1|3
dσ1
(1.16)
p(x, y, z) =1
4π
∫∫S
f(x1, y1, z1)∂
∂n1
(1
|r− r1|
)dσ1. (1.17)
8

Reprezentarea data prin formulele (1.17),(1.15) si (1.16) au obtinut-o Ashley si Landahl
[1], prin asimilarea aripii (de fapt a proiectiei S) cu o distributie continua de dublete cu axele
normale la suprafata S. In reprezentarea obtinuta de noi, am plecat de la ipoteza existentei
saltului de presiune pe aripa care creeaza forta de sustentatie.
Actiunea fluidului asupra aripii. Coeficientii aerodinamici
Pentru a calcula actiunea fluidului asupra aripii, integram pe suprafata S1 saltul campului
de presiune din miscarea perturbata. Astfel, forta rezultanta esta data de
R1 = −∫∫
S1
[[p1]]ndσ1 = −ρV 2∞L
20
∫∫S
fndσ,
iar momentul rezultant datorat interactiunii fluidului cu aripa se defineste prin
M1 = −∫∫
S1
r1 × [[p1]]ndσ1 = −ρV 2∞L
30
∫∫S
r× fndσ,
unde n este versorul normalei exterioare la suprafata Σ.
Atunci, coeficientii aerodinamici adimensionali sunt:
Coeficientul de portanta
CL =R1z
1/2ρV 2∞Aria(S1)
= − 2
A
∫∫D
y′s (η) f (ξ, η) dξdη. (1.18)
Coeficientul de rezistenta la ınaintare
CD =R1x
1/2ρV 2∞Aria(S1)
= − 2
A
∫∫D
(∂yε∂ξ
z′
s (η)− ∂zε∂ξ
y′
s (η)
)f (ξ, η) dξdη. (1.19)
Coeficientul fortelor laterale
CY =R1y
1/2ρV 2∞Aria(S1)
=2
A
∫∫D
z′s (η) f (ξ, η) dξdη. (1.20)
unde A = Aria(S) =
∫∫D
√y′2s (η) + z′2s (η)dξdη.
9

Momentul rezultant datorat interactiunii fluidului cu aripa se defineste prin
M1 = −∫∫
S1
r1 × [[p1]]ndσ1 = −ρV 2∞L
30
∫∫S
r× fndσ,
de unde obtinem coeficientii de moment:
Momentul de ruliu
cx =M1x
1/2ρV 2∞Aria(S1)a1
= − 2
Aa0
∫∫D
(zs(η)z
′
s(η) + ys(η)y′
s(η))
f (ξ, η) dξdη. (1.21)
Momentul de tangaj
cy =M1y
1/2ρV 2∞Aria(S1)a1
=2
Aa0
∫∫D
ξy′
s(η)f (ξ, η) dξdη. (1.22)
Momentul de giratie
cz =M1z
1/2ρV 2∞Aria(S1)a1
=2
Aa0
∫∫D
ξz′
s(η)f (ξ, η) dξdη, (1.23)
unde a1 si respectiv a0 sunt lungimea medie cu dimensiune, respectiv fara dimensiune, a
corzii aripii (a1 = L0a0).
Daca ın formulele 1.18 si 1.19, loc de A, aria suprafetei aripii S, punem A′, aria supafetei
proiectiei aripii pe planul XOY, obtinem coeficientii C ′L si respectiv C ′D cu ajutorul carora
definim coeficientul de eficienta aerodinamica ın raport cu anvergura (span effi-
ciency factor) prin relatia
C ′D =C′2L
πCefAR, (1.24)
unde raportul de aspect AR este definit ca raportul dintre patratul anvergurii si aria
proiectiei aripii pe planul XOY.
Concluzie: Formulele (1.15)-(1.23) arata ca pentru determinarea perturbatiei si a actiunii
fluidului asupra aripii este suficient sa determinam saltul de presiune f .
10

Capitolul 2
Aripa portanta planara de anvergura
finita
In cazul aripii planare, pentru a determina valoarea limita a componentei w a perturbatiei
vitezei, am propus, la ınceputul capitolului al doilea, o metoda riguroasa care evita operatii
formale de permutare a limitei cu integrala sau cu derivata. Prin impunerea conditiei de
alunecare a fluidului la suprafata aripii, se obtine o ecuatie integrala pentru functia necunos-
cuta f . Aceasta ecuatie prezinta o singularitate tare, de ordinul al doilea, de tip Hadamard.
In literatura am ıntalnit o singura metoda numerica de rezolvare a ecuatiei suprafetei
portante a carei convergenta este demonstrata [2]. Schema numerica respectiva este ınsa
lent convergenta, avand ordinul O( 1nα
), 0 < α < 1. In cazul aripii dreptunghiulare, prop-
unem o metoda numerica de rezolvare bazata pe formule de cuadratura de tip Gauss pentru
integrale cu singularitate Cauchy. Simularile numerice sugereaza un ordin de convergenta
de ordinul O(1/n3.5). Metoda se dovedeste a fi eficienta si ın cazul miscarii ın jurul aripii
dreptunghiulare ın prezenta solului.
Pentru linia planara curba, pornind de la dezvoltarea asimptotica a componentei w a
perturbatiei vitezei(data de Guermond [8]), am plasat linia portanta astfel ıncat ın orice
sectiune transversala, momentul act, iunii fluidului fat, a de un un punct situat pe linia por-
tanta sa fie zero. In cazul aripii de incident, a constanta, aripa este plasata la 1/4 din lungimea
corzii fat, a de bordul de atac. Ecuatia obtinuta este o generalizare a ecuatiei liniei portante
drepte a lui Prandtl. Ea surprinde atat curbura cat si ” sageata ” aripii. Am propus de
asemenea o metoda numerica de rezolvare a acestei ecuatii.
11

Pentru aripa planara, suprafata de referinta Σ este planul XOY. Notam cu D proiectia
suprafetei aripii pe planul XOY, numita planforma aripii(figura 2.1). In acest caz relatiile
(1.3) si (1.4) care descriu geometria aripii sunt:
W : z = h(ξ, η), (ξ, η) ∈ D (2.1)
este ecuatia carteziana a suprafetei aripii, iar suprafata S este caracterizata de:
ys(η) = η, zs(η) = 0, (ξ, η) ∈ D,
D = {(ξ, η)|x−(η) ≤ ξ ≤ x+(η),−b ≤ η ≤ b}.(2.2)
Admitem cu a functia h este neteda pe D, iar h,∂h
∂xsi∂h
∂yau ordinul O(ε) pe D, unde
ε� 1 este parametrul care modeleaza deviatia suprafetei de la planul XOY.
In ecuatiile de mai sus b este semianvergura aripii. Am admis ca bordurile laterale ale
planformei fie sunt segmente de dreapta paralele cu directia curentului neperturbat, fie pot
fi reduse la un punct.
𝐕∞
X
Y
an
ver
gu
ra
Bord de atac
Bord de fugă
coarda
-b
b
Figura 2.1: Planforma aripii
12

Campurile de viteza si presiune.
In relatiile (1.17),(1.15) si (1.16) punem
r = xi + yj + zk, r1 = ξi + ηj. (2.3)
Introducem notatiile
x0 = x− ξ, y0 = y − η, R1 = |r − r1| =√x20 + y20 + z2. (2.4)
Deoarece in acest caz n1y = 0, n1z = 1, din formulele generale (1.15),(1.16) si(1.17) regasim
formulele date de Dragos [7] pentru componentele perturbatiei vitezei ın fluid.
Propozitia 1. Perturbatia miscarii uniforme, datorata prezentei aripii portante planare,
este descrisa prin campul de viteze v, de componente u, v, w si distributia de presiune p
definite prin
u(x, y, z) = − z
4π
∫∫D
f(ξ, η)
R31
dξdη, (2.5)
v(x, y, z) =z
2π
∫∫D
f(ξ, η)y0(y20 + z2)2
(1 +
x0R1
)dξdη +
z
4π
∫∫D
f(ξ, η)x0y0(y20 + z2)R3
1
dξdη, (2.6)
w(x, y, z) = − 1
4π
∫∫D
f(ξ, η)y20 − z2
(y20 + z2)2
(1 +
x0R1
)dξdη+
z2
4π
∫∫D
f(ξ, η)x0(y20 + z2)R3
1
dξdη, (2.7)
p(x, y, z) = −u(x, y, z). (2.8)
Tinand cont de (2.1), conditia de alunecare (1.9) devine
w(x, y, 0) =∂h
∂x(x, y), (∀) (x, y) ∈ D. (2.9)
13

Deducerea ecuatiei suprafetei portante
Pentru a afla valorile perturbatiei componentei w pe aripa, trebuie sa trecem la limita
cand z → 0. Prin simpla ınlocuire z = 0 ın formula (2.7), integralele devin singulare.
Definitia 2. Pentru orice functie test ϕ ∈ D (R2), supp ϕ ⊂ [−A,A]× [−A,A], definim⟨FP 1
y2
(1 +
x√x2 + y2
), ϕ
⟩= lim
ε→0+
[∫∫Dε
ϕ (x, y)
y2
(1 +
x√x2 + y2
)dxdy−
−2
ε
∫ A
−Aϕ(x, 0)(1 + sgnx)dx
],
(2.10)
unde Dε = [−A,A]× {[−A,A] \ [−ε, ε]} .
Propozitia 2. Pentru orice functie test ϕ ∈ D (R2), supp ϕ ⊂ [−A,A] × [−A,A], are loc
egalitatea⟨FP 1
y2
(1 +
x√x2 + y2
), ϕ
⟩=
=
A∫−A
A∫−A
ϕ(x, y)− ϕ(x, 0)− y∂ϕ∂y
(x, 0)
y2
(1 +
x√x2 + y2
)dxdy−
− 2
A
A∫−A
ϕ(x, 0)− ϕ(0, 0)
x
(x+√A2 + x2
)dx− 4ϕ(0, 0).
(2.11)
Propozitia 3. In spatiul distributiilor D′(R2) au loc urmatoarele limite:
a) limz→0
y2 − z2
(y2 + z2)2
(1 +
x√x2 + y2 + z2
)= FP 1
y2
(1 +
x√x2 + y2
).
b) limz→0
xz2
(y2 + z2)(x2 + y2 + z2)3/2= 0.
(2.12)
Teorema 2. Daca f este o functie local integrabila cu suport compact, atunci
limz→0
w(x, y, z) = − 1
4π
∗∫∫D
f(ξ, η)
(y − η)2
[1 +
x− ξ√(x− ξ)2 + (y − η)2
]dξdη. (2.13)
Pe baza conditiei de alunecare (2.9) obtinem ecuatia suprafetei portante, pentru functia
14

necunoscuta f, data prima data de Multhopp (1955):
− 1
4π
∫∫ ∗D
f(ξ, η)
(y − η)2
(1 +
x0R
)dξdη =
∂h
∂x(x, y), (x, y) ∈ D. (2.14)
Definitia 3. Pentru orice functie test ϕ ∈ D (R2), supp ϕ ⊂ [−A,A]× [−A,A], definim⟨PV
[1
y
(1 +
√x2 + y2
x
)], ϕ
⟩= lim
ε→0+
∫∫D1ε
ϕ (x, y)
y
(1 +
√x2 + y2
x
)dxdy (2.15)
unde D1ε = ([−A,−ε] ∪ [ε, A])× ([−A,−ε] ∪ [ε, A]).
Propozitia 4.
∂
∂yPV
[1
y
(1 +
√x2 + y2
x
)]= −FP
[1
y2
(1 +
x√x2 + y2
)], ın D′(R2). (2.16)
Obtinem astfel o alta forma ecuatiei suprafetei portante, care contine doar singularitati
de tip Cauchy:
1
4π
∂
∂y
∫∫ ∗D
f(ξ, η)
y − η
(1 +
R
x0
)dξdη =
∂h
∂x(x, y), (x, y) ∈ D. (2.17)
O metoda numerica ın cazul aripii dreptunghiulare
Vom da o alta forma a ecuatiei suprafetei portante. Pornim de la ecuatia (2.17) si facem
urmatoarele ipoteze:
i)Axa OX este axa de simetrie pentru domeniul D;
ii)D este multime convexa.
Propozitia 5. In ipotezele i) si ii) de mai sus, o alta forma a ecuatiei suprafetei portante
este:
1
4π
∫∫ ∗D
f (ξ, η)
y − η
1 +
√(x− ξ)2 + (y − η)2
x− ξ
dξdη =
∫ y
0
∂h
∂x(x, t)dt, (x, y) ∈
◦D. (2.18)
Daca D=[−1, 1]× [−b, b] atunci ipotezele i) si ii) sunt ındeplinite. Efectuam schimbarea
de variabile
x = x′, y = by′, ξ = ξ′, η = bη′, (2.19)
15

dar pentru usurinta scrierii vom renunta la semnul ”prim” si vom nota noile variabile la fel
ca pe cele vechi. Tinand cont de conditiile la frontiera pe care trebuie sa le ındeplineasca
saltul de presiune f , cautam solutii(ın vechile variabile) de forma
f(x, y) =
√x+(y)− xx− x−(y)
√b2 − y2F (x, y), (x, y) ∈ D. (2.20)
In noile variabile, ecuatia (2.18) se scrie
1
4π
∫ ∗1−1
√1− η2y − η
(∫ ∗1−1
√1− ξ1 + ξ
F (ξ, η)
[1 +
√(x− ξ)2 + b2(y − η)2
x− ξ
]dξ
)dη =
=
∫ by
0
∂h
∂x(x, t)dt.
(2.21)
Impunem ca ecuatia (2.21) sa fie verificata ın punctele de control (xi, yj), unde
xi = cos
(2i− 1
2m+ 1π
), i = 1,m
yj = cos
(2j − 1
n+ 1
π
2
), j = 1, n+ 1.
(2.22)
Folosim formulele de cuadratura, vezi Dragos [7]:
∫ ∗1−1
√1− ξ1 + ξ
f(ξ)
ξ − xidξ ' 2π
2m+ 1
m∑k=1
1− ξkξk − xi
f(ξk),
∫ ∗1−1
√1− η2 f(η)
η − yjdη ' π
n+ 1
n∑l=1
1− η2lηl − yj
f(ηl),
unde
ξk = cos
(2kπ
2m+ 1
), k = 1,m,
ηl = cos
(2l − 1
n+ 1
π
2
), l = 1, n+ 1
(2.23)
reprezinta punctele de colocatie.
Dupa aplicarea formulelor de cuadratura de mai sus ın ecuatia 2.21, obtinem un sistem
16

liniar de forma
m∑k=1
n∑l=1
AijklFkl = Hij, i = 1,m, j = 1, n+ 1, (2.24)
unde Fkl = F (ξk, ηl) sunt necunoscute, Hij =
∫ byj
0
∂h
∂x(xi, t)dt sunt cunoscute, iar coeficientii
cunoscuti ai matricei sistemului sunt
Aijkl =π
2(2m+ 1)(n+ 1)
(1− η2l )(1− ξk)yj − ηl
[1 +
√(xi − ξk)2 + b2(yj − ηl)2
xi − ξk
]. (2.25)
Sistemul de ecuatii liniare (2.24) este supradeterminat, avand m(n + 1) ecuatii si mn
necunoscute. Pentru a echilibra numarul de ecuatii cu numarul de necunoscute, introducem
m necunoscute fictive {Ci}i=1,m. astfel ca obtinem sistemul patratic
m∑k=1
n∑l=1
AijklFkl + Ci = Hij, i = 1,m, j = 1, n+ 1. (2.26)
Prin rezolvarea sistemului (2.26) obtinem Ci = 0, i = 1,m, ceea ce arata ca sistemul (2.24)
este compatibil.
Rezultate numerice
Placa plana de incidenta constanta α si raport de aspect AR = 1
Am ales ales acelasi numar n de puncte de colocatie atat pe coarda cat si pe anvergura.
O fitare a datelor sugereaza un comportament de forma
CL/α = 1.4602265 + 0.1169319/n3.5. (2.27)
Valoarea CL/α = 1.4602265 coincide cu cea obtinuta de Tuck [19] pana la a saptea cifra
semnificativa.
Placa plana de anvergura mica (low aspect ratio) si incidenta constanta α
In Dragos [7] este data solutia exacta ın acest caz. Astfel CL/α = πb/2. Pentru b = 0.1,
solutia exacta este CL/α = 0.15708 ın timp ce pentru metoda propusa de noi
CL/α = 0.15702.
17

Linia portanta curba pentru aripi planare
ℒ
C
Y
X
Bord de fugă
Bord de atac
Linie portantă
curbă
Figura 2.2
Alegem ca lungime caracteristica semianvergura aripii (jumatatea distantei ıntre bor-
durile laterale ale aripii). Atunci domeniul D poate fi descris de:
D = {(x, y)| x−(y) ≤ x ≤ x+(y), y ∈ [−1, 1]} . (2.28)
Facem ipoteza ca anvergura aripii este mult mai mare decat maximul corzii profilului, ceea
ce ınseamna ca
ε = supy∈[−1,1]
|x+(y)− x−(y)| � 1. (2.29)
Aceasta ipoteza permite, ın contextul liniei portante, asimilarea aripii cu un segment de linie
18

dreapta sau curba. Convenim sa reprezentam bordurile de atac si de fuga prin urmatoarele
ecuatii
x−(y) = x0(y) + εxa(y), x+(y) = x0(y) + εxf (y), y ∈ [−1, 1] , (2.30)
unde functiile y 7→ xa(y) si y 7→ xf (y) sunt de ordinul O(1) si de clasa C1(−1, 1).
x = x0(y) reprezinta ecuatia carteziana a unei linii curbe L care va juca rolul segmentului
de dreapta cu care Prandtl a asimilat aripa. Locul ın care este situata linia L ıl vom preciza
mai tarziu. Admitem ca functia y 7→ x0(y) ımpreuna cu prima si a doua derivata sunt de
ordinul O(1) pe intervalul (-1,1).
Introducem functia necunoscuta Γ, circulatia vitezei de-a lungul profilului obtinut prin
sectionarea aripii cu un plan Y = y. Dupa liniarizare, urmeaza ca
Γ(y) =
∫ x+(y)
x−(y)
(p+ − p−)dx =
∫ x+(y)
x−(y)
f(x, y)dx, (2.31)
Daca bordurile laterale se reduc la un punct, atunci x−(±1) = x+(±1), iar daca bordurile
laterale sunt segmente paralele cu directia curentului neperturbat, atunci din conditia Kutta-
Jukovski f(x,±1) = 0. Prin urmare, pentru ambele tipuri de aripa pe care le luam ın
considerare
Γ(1) = Γ(−1) = 0. (2.32)
Admitem ca functia Γ este derivabila pe intervalul (-1,1), iar derivata sa este functie Holder
pe intervalul [-1,1].
Notam
tgΛ(y) = x0′(y),
c(y) =x+(y)− x−(y)
2,
P (y) =c(y)
2r(y)
[2k(y) + tg2Λ(y) + ln
4
e2c(y) cos2 Λ(y)
],
Q(y) = c(y)
[2k(y) sin Λ(y) + sin Λ(y)ln
4
ec(y) cos2 Λ(y)− ln
1 + sin Λ(y)
cos Λ(y)
],
j(y) = 2
∫ x+(y)
x−(y)
√x− x−(y)
x+(y)− x∂h
∂x(x, y)dx.
(2.33)
19

Teorema 3. Ecuatia integro-diferentiala a liniei portante curbe este
Γ(y)
cos Λ(y)− c(y)
2
∗1∫−1
Γ (η)
(y − η)2
1 +x0 (y)− x0 (η)√
(x0 (y)− x0 (η))2 + (y − η)2
dη+
+P (y)Γ(y) +Q(y)Γ′(y) = j(y), −1 < y < 1,
(2.34)
unde functia necunoscuta Γ reprezinta circulatia vitezei ın jurul profilului obtinut prin intersectia
aripii cu planul η = η0, iar functiile Λ, c, P, Q si j sunt definite de formulele (2.33) de mai
sus.
O solutie numerica a ecuatiei liniei portante curbe
Vom da o metoda numerica de rezolvare a unei ecuatii integro-diferentiale singulare de
forma:
a(y)Γ(y) + b(y)Γ′(y) + c(y)
∫ ∗1−1
Γ(η)
(y − η)2[1 + g(y, η)sign(y − η)] dη = j(y),
pentru − 1 < y < 1, cu conditiile Γ(−1) = Γ(1) = 0.
(2.35)
Cautam solutii de forma Γ(y) =√
1− y2 C(y). Deoarece ın evaluarea numerica a integralei
intervin valorile functiei Γ ın nodurile Cebasev de speta a doua,
yk = cos tk, tk =kπ
n+ 1, k = 1, n,
aproximam functia C cu polinomul de interpolare Lagrange care trece prin aceste noduri.
Asadar vom cauta o solutie aproximativa de forma
Γ(y) =√
1− y2n∑k=1
CkUn(y)
(y − yk)U ′n(yk), Ck = C(yk). (2.36)
Notam
Γk = Γ(yk) =√
1− y2k Ck, ak = a(yk), bk = b(yk),
ck = c(yk), jk = j(yk), gkl = g(yk, yl), k, l = 1, n.(2.37)
Se cunoaste din [14] ca
Γ′(y) = − 2
n+ 1
n∑i=1
Cisin tisin t
n∑l=1
l sin lti cos lt, y = cos t, 0 < t < π. Integrala care apare
20

ın ecuatia (2.35) contine o discontinuitate de speta ıntai ın η = y. Pentru a o evalua numeric,
mai ıntai o regularizam prin ”extragerea” singularitatii si apoi aplicam formula de integrare
numerica∫ ∗1−1
√1− η2 C(η)
(yk − η)2dη ' π
n+ 1
n∑j 6=k
[1− (−1)j+k]1− y2j
(yk − yj)2Cj −
π(n+ 1)
2Ck.
Astfel ∫ ∗1−1
Γ(η)
(yk − η)2g(yk, η)sign(yk − η)dη =
=
∫ ∗1−1
√1− η2
(yk − η)2[C(η)g(yk, η)− Ckgkk]sign(yk − η)dη+
+ Ckgkk
∫ ∗1−1
√1− η2
(yk − η)2sign(yk − η)dη =
=π
n+ 1
n∑j 6=k
[1− (−1)j+k]1− y2j
(yk − yj)2[Cjgkj − Ckgkk]sign(yk − yj)+
+ Ckgkk
(2yk√1− y2k
− 2 arcsin yk +2yk log(2− 2y2k)√
1− y2k
), k = 1, n.
(2.38)
Impunand ca ecuatia (2.35) sa fie satisfacuta ın punctele yk, k = 1, n, obtinem un sistem
liniar de n ecuatii si n necunoscute (Ck)k=1,n.
21

Capitolul 3
Aripa portanta nonplanara
Capitolul al treilea este dedicat studiului aripii nonplanare. Pornind de la ecuatia
suprafetei portante nonplanare si folosind metoda introdusa de Kida si Miyai [11], am de-
terminat ecuatia liniei portante si am dat interpretarea ın contextul modelului lui Prandtl.
Pentru aceasta ecuatie am determinat doua solutii exacte, pentru aripa avand o distributie
pseudoeliptica a lungimii corzii si pentru aripa inelara circulara. Pentru fiecare din aceste
situatii, solutia asimptotica este aproximarea liniara a solutiei exacte.
Am propus doua metode numerice de rezolvare a ecuatiei liniei portante nonplanare pen-
tru cazul ın care aripa este deschisa si o metoda pentru aripa inelara eliptica. In una din
aceste metode am adus ecuatia la o forma pentru care exista deja ın literatura o teorema de
convergenta a metodei numerice. Testarea acestor metode s-a facut pe solutiile exacte ale
problemei. Simularile numerice dovedesc ca toate cele trei metode au un ordin de convergenta
ridicat. Pentru aripa arcuita circulara avand lungimea corzii constante, am aratat ca solutia
asimptotica diverge la bordurile laterale ale aripii.
Am determinat analitic geometria aripii arcuite circulare avand rezistenta la ınaintare
minima. Cu ajutorul acestei solutii exacte, am validat analitic, pentru clasa aripilor ın forma
de arc de cerc, o conjectura legata de aripa de rezistenta minima.
22

Teorema 4. Ecuatia integrala singulara a suprafetei portante nonplanare este
y′
s(η0)w(ξ0, η0)− z′
s(η0)v(ξ0, η0) =∂zε∂ξ
y′
s −∂yε∂ξ
z′
s, (ξ0, η0) ∈ S, (3.1)
unde componentele v si w ale perturbatiei vitezei pe aripa sunt date de formulele
v (ξ0, η0) =1
4π
∫∫ ∗D
f (ξ, η) z′s (η)
R2s
(1 +
ξ0 − ξR1s
)dξdη−
− 1
2π
∫∫ ∗D
f (ξ, η) z′s (η) [ys (η0)− ys (η)]2
R4s
(1 +
ξ0 − ξR1s
)dξdη+
+1
2π
∫∫ ∗D
f (ξ, η) y′s (η) [ys (η0)− ys (η)] [zs (η0)− zs (η)]
R4s
(1 +
ξ0 − ξR1s
)dξdη−
− 1
4π
∫∫ ∗D
f (ξ, η) {z′s (η) [ys (η0)− ys (η)]− y′s (η) [zs (η0)− zs (η)]}R2s
[ξ0 − ξ] [ys (η0)− ys (η)]
R31s
dξdη,
(3.2)
w (ξ0, η0) = − 1
4π
∫∫ ∗D
f (ξ, η) y′s (η)
R2s
(1 +
ξ0 − ξR1s
)dξdη+
+1
2π
∫∫ ∗D
f (ξ, η) y′s (η) [zs (η0)− zs (η)]2
R4s
(1 +
ξ0 − ξR1s
)dξdη−
− 1
2π
∫∫ ∗D
f (ξ, η) z′s (η) [ys (η0)− ys (η)] [zs (η0)− zs (η)]
R4s
(1 +
ξ0 − ξR1s
)dξdη−
− 1
4π
∫∫ ∗D
f (ξ, η) {z′s (η) [ys (η0)− ys (η)]− y′s (η) [zs (η0)− zs (η)]}R2s
[ξ0 − ξ] [zs (η0)− zs (η)]
R31s
dξdη,
(3.3)
iar
R2s = [ys (η0)− ys (η)]2 + [zs (η0)− zs (η)]2 , (3.4)
R1s =
√(ξ0 − ξ)2 + [ys (η0)− ys (η)]2 + [zs (η0)− zs (η)]2. (3.5)
23

Linia portanta pentru aripa nonplanara
Figura 3.1
Alegem ca lungime caracteristica semianvergura aripii. Notam cu ε maximul lungimii
semicorzii profilului si facem urmatoarele ipoteze:
i) ε� 1 (aripa de anvergura mare);
ii) |ξ| ≤ ε pentru orice punct M(ξ, η) ∈ D (aripa asimilata cu arcul de curba C).(3.6)
Descriem domeniul D si ecuatiile bordului de atac respectiv fuga prin
D = {(ξ, η)| x−(η) ≤ ξ ≤ x+(η), η ∈ [−θ, θ]} ,x−(η) = εxa(η), x+(η) = εxf (η), η ∈ [−θ, θ] ,
(3.7)
unde functiile η 7→ xa(η) si η 7→ xf (η) sunt de ordinul O(1), continue pe [−θ, θ] si de clasa
C1(−θ, θ). Introducem circulatia vitezei ın jurul profilului obtinut prin intersectia aripii cu
planul η = η0,
Γ(η0) =
∫ x+(η0)
x−(η0)
f(ξ, η)dξ. (3.8)
24

Daca C este un arc deschis de curba, la capetele aripii diferenta ıntre valorile presiunii pe
extrados si intrados dispare si prin urmare
Γ(θ) = Γ(−θ) = 0. (3.9)
Daca C este o curba ınchisa, continuitatea circulatiei de-a lungul liniei portante impune ca
Γ(θ) = Γ(−θ). (3.10)
Admitem ca functia Γ este derivabila pe intervalul (-1,1), iar derivata sa este functie Holder
pe intervalul [-1,1].
Propozitia 6. In orice punct M0 ∈ C, componenta normala vitezei pe aripa este:
vn(η0) = limM 7→M0
v(M) · n0 =1
4π√y′2s (η0) + z′2s (η0)
∗θ∫−θ
Γ′ (η) k1(η0, η)dη, (3.11)
unde
k1(η0, η) =[ys(η0)− ys(η)]y′s(η0) + [zs(η0)− zs(η)]z′s(η0)
[ys(η0)− ys(η)]2 + [zs(η0)− zs(η)]2. (3.12)
Teorema 5. Ecuatia integrala a liniei portante nonplanare este
a(η0)Γ (η0)−c(η0)
2
∗θ∫−θ
Γ (η)K(η0, η)
R2s
dη = j(η0), −θ < η0 < θ, (3.13)
unde functia necunoscuta este Γ , iar functiile a, c si j sunt definite de formulele
c(η0) =x+(η0)− x−(η0)
2,
a(η0) =√y′2s (η0) + z′2s (η0),
j(η0) = 2
∫ x+(η0)
x−(η0)
h(ξ0, η0)
√ξ0 − x−(η0)
x+(η0)− ξ0dξ0,
h(ξ0, η0) =∂zε∂ξ
y′
s −∂yε∂ξ
z′
s,
(3.14)
25

iar nucleul K este o functie regulata ın patratul [−θ, θ]2 si se exprima prin:
K(η0, η) = y′s(η)y′s(η0) + z′s(η)z′s(η0)−
− 2y′s(η)y′s(η0) [zs(η)− zs(η0)]2 + 2z′s(η)z′s(η0) [ys(η)− ys(η0)]2
R2s
+
+2 [ys (η)− ys (η0)] [zs (η)− zs (η0)] [y′s (η0) z
′s (η) + y′s (η) z′s (η0)]
R2s
, η 6= η0
K(η0, η0) = y′2s (η0) + z
′2s (η0) .
(3.15)
DeoareceK
R2s
=∂k1∂η
, urmeaza ca
Propozitia 7. O alta forma a ecuatiei liniei portante este
a(η0)Γ (η0) +c(η0)
2
∗θ∫−θ
Γ′ (η) k1(η0, η)dη = j(η0), −θ < η0 < θ. (3.16)
Solutia asimptotica a ecuatiei liniei portante nonplanare
Introducem noile variabile x1 si ξ1 prin ξ = εξ1, ξ0 = εξ01.
Facem conventia de notare ca relativ la noile variabile x1 si ξ1, functiile sa le notam cu
simbolul tilda deasupra.
Teorema 6. Daca circulatia Γ are un comportament asimptotic de forma Γ = Γ0 + εΓ1 +
O (ε2lnε) , atunci
Γ0 =1√
y′2s (η0) + z′2s (η0)j(η0),
Γ1 =c(η0)
2√y′2s (η0) + z′2s (η0)
∗θ∫−θ
Γ0 (η)K(η0, η)
R2s
dη.
(3.17)
Solutii exacte ale ecuatiei liniei portante nonplanare
i) Aripa pseudoeliptica
In cazul unei aripi pentru care imaginea curbei C este un arc de cerc de raza, dimensionala,a
26

si deschidere 2θ, 0 < θ < π, daca functiile c si j care dau geometria aripii au forma
c (p)(1 + p2
)= c0
√1− p2
b20, j (p) = c0α0
√1− p2
b20, p = tg
η02, b0 = tg
(θ
2
), (3.18)
c0 si α0 fiind constante reale, ecuatia liniei portante nonplanare are solutia de forma
Γexact (p) = λ
√1− p2
b20, p = tg
η02, (3.19)
unde
λ =c0α0
1 +πc04b0
. (3.20)
Solutia asimptotica este:
Γasimptotic (p) = c0Γ0(η0) + c20Γ1(η0) = α0c0
√1− p2
b20
(1− πc0
4b0
), p = tg
η02. (3.21)
Coeficientul de eficienta aerodinamica este
Cef =1
cos4θ
4
> 1, daca 0 < θ ≤ π/2,
Cef =
(4 cos
θ
2tgθ
4
)2
, daca π/2 < θ < π.
(3.22)
Valoarea maxima coeficientului de eficienta este 1.44272 pentru o semideschidere de
θ = 1.80911 .
ii) Aripa inelara circulara
Pentru aripa inelara circulara de incidenta constanta α pentru care imaginea curbei C este
un cerc de raza (dimensionala) a iar lungimea (dimensionala) a semicorzii este constanta ac0.
Alegem a, raza cercului, ca lungime caracteristica. Atunci ecuatia liniei portante nonplanare
se scrie:
Γ(η0)−c08
∫ ∗π−π
Γ(η)
sin2 η − η02
dη = −2πc0α cos η0, −π ≤ η0 ≤ π. (3.23)
27

Solutia exacta ın cazul aripii inelare circulare este:
Γexact(η) = − 2πc0α
1 +πc02
cos η. (3.24)
Solutia asimptotica este:
Γasimptotic(η) = c0Γ(η) = −2πc0α cos η(
1− π
2c0
). (3.25)
Coeficientul de eficienta este Cef = 2.
Solutii numerice
i) Aripa redusa la un arc deschis de curba
Admitem ca C este un arc deschis de curba descris de ecuatiile parametrice:
C : y = y(s) z = z(s) − 1 ≤ s ≤ 1 (3.26)
Facem notatiile
a(s) =√y′2(s) + z′2(s), b(s) =
c(s)
2. (3.27)
Vom da cate o metoda numerica de rezolvare pentru fiecare din ecuatiile (3.13) si (3.16).
Metoda ıntai
Se aduce ecuatia (3.16) la forma
− 1
π
∗1∫−1
Γ′(σ)
σ − sdσ + A(s)Γ(s) +
1
π
1∫−1
H(s, σ)Γ(σ)dσ = J(s), −1 < s < 1, (3.28)
pentru care ın Prossdorf [14], pag.339-341, este data o metoda numerica de rezolvare, ınsotita
de o teorema de convergenta. Pentru discretizarea acestei ecuatii, urmand ideile din [14],
cautam solutii de forma
Γ(s) =√
1− s2C(s).
Aproximam functia C cu polinomul de interpolare Lagrange de gradul n cu nodurile sjnradacinile polinomului Cebasev de speta a doua Un. Astfel, se definesc
Γn(s) =√
1− s2n∑j=1
CjUn(s)
(s− sjn)U ′n(sjn), Cj = C(sj), (3.29)
28

Un(s) =sin(n+ 1)t
sin t, s = cos t, tjn =
jπ
n+ 1, sjn = cos tjn. (3.30)
Impunem ca ecuatia 3.16 sa fie satisfacuta ın nodurile Cebasev skn. Cu notatiile
bkj =(1− s2kn)H(skn, skn)
n+ 1, Ak = A(skn) Jk = J(skn)
reducem rezolvarea aproximativa ecuatiei (3.28) la rezolvarea unui sistem patratic de n
ecuatii cu n necunoscute.
AkCk +n∑j=1
(akj + bkj)Cj = Jk, k = 1, n (3.31)
Se introduce spatiul
X0 = {u ∈ C[−1, 1] ∩ C1(−1, 1)|u′ ∈ L2µ, u(−1) = u(1) = 0}
echipat cu norma ‖u‖0 = ‖u‖∞ + ‖u′‖µ si se noteaza cu W 21,µ completatul sau. Atunci are
loc urmatorul rezultat.
Teorema 7. [14] Daca ecuatia omogena asociata ecuatiei(3.28) are doar solutia nula, functiile
A,H si J sunt continue atunci sistemul liniar 3.31 are solutie unica pentru n suficient de
mare iar (Γn)n converge ın norma la solutia ecuatiei (3.28).
Metoda a doua
Pentru rezolvarea ecuatiei
a(s)Γ(s)− b(s)∫ ∗1−1
Γ(σ)N(s, σ)
(s− σ)2dσ = j(s),−1 < s < 1, (3.32)
cu conditiile Γ(−1) = Γ(1) = 0, cautam solutii de forma
Γ(s) =√
1− s2 Γ(s). (3.33)
Impunem ca ecuatia sa fie satisfacuta ın punctele sl = coslπ
n+ 1, l = 1, n, notam
Γl = Γ(sl), al = a(sl), bl = b(sl), jl = j(sl), Nlj = N(sl, sj),
29

si obtinem sistemul liniar de n ecuatii cu n necunoscute {Γl}l=1,n :
al
√1− s2l Γl−
blπ
n+ 1
n∑j 6=l
[1− (−1)j+l
] 1− s2j(sj − sl)2
NljΓj−π(n+ 1)
2NllΓl = jl, l = 1, n. (3.34)
ii) Aripa inelara
Atunci cand imaginea curbei C este un cerc sau o elipsa, nucleul ecuatiei liniei portante
nonplanare se scrie sub forma
K
R2s
=
(K
R2s
)s
+
(K
R2s
)r
, (3.35)
unde (K
R2s
)s
=1
4 sin2 s− t2
(3.36)
reprezinta partea singulara a nucleului iar
(K
R2s
)r
reprezinta partea regulata a nucleului.
Ecuatia liniei portante nonplanare (3.13) se scrie atunci:
a(t)Γ(t)− c(t)
8
∫ ∗π−π
Γ(s)
sin2 s− t2
ds− c(t)
2
∫ π
−πΓ(s)
(K
R2s
)r
ds = j(t), −π ≤ t ≤ π, (3.37)
cu conditia Γ(−π) = Γ(π). Pentru a discretiza integrala singulara, folosim formula de
cuadratura:∫ ∗π−π
f(t)
sin2 t− tk2
dt ' 4π
2n+ 1
n∑i=−ni 6=k
f(ti)w′i(tk)−
4πn(n+ 1)
2n+ 1f(tk), k = −n, n (3.38)
Impunem ca ecuatia sa fie satisfacuta ın punctele tk =2k
2n+ 1π, k = −n, n, folosim formulele
de cuadratura (3.38) pentru integrala singulara, facem notatiile
Γk = Γ(tk), ak = a(tk), ck = c(tk), jk = j(tk), Rki =
(K
R2s
)r
(tk, ti)
30

si obtinem sistemul liniar patratic de ordinul 2n+ 1 cu necunoscutele {Γk}k=−n,n :
akΓk−πck
2(2n+ 1)
n∑i=−ni 6=k
w′i(tk)Γi−πck
2n+ 1
n∑i=−n
RkiΓi+πn(n+ 1)ck2(2n+ 1)
Γk = jk, k = −n, n (3.39)
Aripa de rezistenta minima
Problema aripii de rezistenta minima poate fi formulata astfel:
Dintre toate aripile care au aceeasi portanta, sa se determine distributia optima Γopt a
circulatiei vitezei si geometria aripii pentru care rezistenta la ınaintare este minima.
Teorema 8. (Demasi et al. [5]) Atunci cand curba C este simetrica fata de axa OZ,
distributia optima circulatiei vitezei verifica ecuatia
1
2π
∫ θ
−θΓ(η)k1(η, η0)dη = −λys(η0), η0 ∈ (−θ, θ). (3.40)
Ecuatia (3.40) trebuie integrata cu conditiile
Γ(θ) = Γ(−θ) = 0, daca C este un arc deschis de curba,
Γ(θ) = Γ(−θ), daca C este o curba ınchisa.(3.41)
In literatura (Demasi[4]) se cunosc repartitiile optime ale circulatiei viteze pentru aripa
inelara circulara si aripa inelara eliptica de semiaxe aw si bw (atat cazul aw > bw cat si aw < bw). In toate aceste trei situatii distributia optima circulatiei este de forma Γopt(η) = k cos η, k
fiind o constanta reala.
Teorema 9. i) Repartitia optima a circulatiei vitezei ın cazul aripii ın forma de arc de cerc
de deschidere 2θ este
Γopt(p) = κ
√b2 − p2
1 + p2, p = tg
η
2, b = tg
θ
2(3.42)
unde κ este o constanta reala.
31

ii) In acest caz coeficientul de eficienta aerodinamica este
Cef (θ) = 0.5tg2(θ
2
)+ 1, daca 0 < θ < π/2,
Cef (θ) = 2
[1− cos4
(θ
2
)], daca π/2 < θ < π.
(3.43)
Conjectura (Demasi) Daca C este o curba inchisa, Cε este curba obtinuta din C prin
indepartarea unei mici portiuni, iar Γ, respectiv Γε sunt distributiile optime ale circulatiei
vitezei pentru care se obtine aripa de rezistenta minima, atunci limε→0 Γε = Γ + constanta.
Demasi[5] justifica numeric conjectura pentru mai multe tipuri de aripa. Vom valida analitic
conjectura pentru cazul aripii nonplanare ın forma de arc de cerc.
Teorema 10. Fie o aripa ın forma de arc de cerc, cu lungimea semicorzii o constanta c0,
descrisa ın planul Y OZ de un arc de cerc de deschidere 2θ. Fie Γopt(θ) distributia optima a
circulatiei la un coeficient de portanta CL dat. Atunci limθ→π
Γopt(θ) este o distributie optima
a circulatiei vitezei pentru aripa inelara circulara avand aceelasi coeficient de portanta.
32

Concluzii
Rezultatele din aceasta teza pot fi sintetizate astfel:
• Metoda solutiilor fundamentale s-a dovedit, atat ın cazul liniei portante curbe cat si
ın cazul liniei portante nonplanare, un instrument matematic de studiu util pentru deter-
minarea miscarii perturbate. In ambele situatii, metoda solutiilor fundamentale conduce la
aceleasi rezultate ca modelul lui Prandtl. Zona de curgere nepotentiala din aval de aripa,
nu mai este postulata, ca ın modelele clasice, ea este o consecinta a ecuatiilor de miscare.
• In cazul aripii portante curbe, relatia geometrica ıntre unghiul geometric de atac,
unghiul efectiv de atac si deflectia curentului de aer, care conduce, ın modelul lui Prandtl,
la ecuatia liniei portante, trebuie reinterpretata.
• Modelul clasic al lui Prandtl pentru linia portanta dreapta poate fi adaptat la cazul
aripii nonplanare de anvergura mare, cu doua ajustari:
- aripa se reduce la un segment curb, situat ıntr-un plan perpendicular pe directia curentului
uniform;
- zona din spatele aripii, ın care curgerea nu este potentiala, este o suprafata cilindrica,
avand generatoarele paralele cu directia curentului uniform.
• Ecuatia liniei portante nonplanare este o aproximare liniara a ecuatiei suprafetei por-
tante nonplanare, ın raport cu inversul anvergurii aripii. Este o ecuatie cu acelasi tip de
singularitate ca ecuatia lui Prandtl pentru linia portanta dreapta. S-au pus ın evidenta trei
metode numerice de rezolvare, cu o rata de convergenta foarte buna.
• La fel ca ın cazul liniei portante drepte, solutia asimptotica este divergenta la capetele
aripii, in cazul ın care bordurile laterale ale aripii sunt segmente de dreapta.
33

Ca directii de cercetare ulterioare propunem:
• Pentru suprafata planara si pentru linia portanta nonplanara am demonstrat riguros
trecerea la limita de la viteza ın fluid la viteza pe aripa. Pentru suprafata portanta nonpla-
nara si pentru linia portanta curba, problema a ramas nerezolvata.
•Metoda numerica, descrisa ın Capitolul 2 are o rata de convergenta ridicata. Incercarea
de extindere a metodei la aripi simetrice fata de axa OX, de forma arbitrara, conduce la o
schema numerica instabila. De asemenea, se impune elaborarea unei metode numerice efi-
ciente de rezolvare a ecuatiei suprafetei portante nonplanare.
• Studiul efectelor de sol si de tunel de vant ın teoria liniei portante nonplanare.
• Studiul miscarii nestationare ın jurul aripii portante nonplanare.
• O noua abordare a ecuatiei liniei portante nonplanare, prin reducerea acesteia la o
ecuatie Fredholm, folosind un procedeu de regularizare de tip Vekua-Carleman, a operatorilor
integrali singulari.
34

Bibliografie selectiva
[1] H.Ashley, M.Landahl, Aerodynamics of wings and bodies, Dover Publications (1985)
[2] S.M.Belotserkovsky, I.K.Lifanov, Method of discrete vortices, CRC Press (1993)
[3] C.Cone, The theory of induced lift and minimum induced drag of nonplanar lifting sys-
tems, NASA TR R-139 (1962)
[4] L.Demasi, A theoretical investigation on the conditions of minimum induced drag of
closed wing systems and C-Wings , Journal of Aircraft, 44(1), 81-99 (2007)
[5] L.Demasi, A.Dipace, G.Monegato, R.Cavallaro, Invariant formulation for the minimum
induced drag conditions of nonplanar wing systems, AIAA Journal, 52, 2223-2240 (2014)
[6] L.Dragos, Method of fundamental solutions. A novel theory of lifting surface in subsonic
flow, Arch. of Mechanics, 35(5-6), 579-590 (1983)
[7] L.Dragos, Metode matematice ın aerodinamica, Editura Academiei Romane
(2000),Kluwer Academic Publishers(2003)
[8] J.L.Guermond, Generalized lifting-line theory for curved and swept wings, Journal of
Fluid Mechanics, 211, 497-513 (1990)
[9] D.Homentcovschi, Aerodinamique stationaire linearisee I.(Subsonique), Archives of Me-
chanics, 27, 325-341 (1975).
[10] G.Iosilevskii, Asymptotic theory of high-aspect-ratio arched wings in steady incompress-
ible flow, Journal of Fluid Dynamics, 303, 367-377 (1995)
[11] T.Kida, Y.Miyai, An alternative treatment of lifting-line theory as a perturbation prob-
lem, ZAMP, 29(4), 591-607 (1978)
[12] H.Multhopp, Methods for calculating the lift distribution of wings(subsonic lifting sur-
face theory), ARC R&M, No2884 (1955)
35

[13] A.Plotkin, J.Katz, Low-speed aerodynamics, McGraw-Hill (1991)
[14] S.Prossdorf, B.Silbermann, Numerical analysis for integral and related operator equa-
tions, Akademie Verlag 1990
[15] A.Stoica, A Numerical solution for the lifting surface integral equation, INCAS Bul-
letin,6(1), 159-164 (2014)
[16] A.Stoica, A rigorous derivation of certain equations arising in the lifting wing theory,
Bulletin Mathematique de la Societe des Sciences Mathematiques de Roumanie (trimis
spre publicare)
[17] A.Stoica, An exact solution for the minimum induced drag of an circular arched wing
and the validation of a conjecture, Journal of Engineering Mathematics(trimis spre pub-
licare)
[18] A.Stoica, A singular integral equation for curved wings of high aspect ratio, Proc. Ro.
Acad. Series A (trimis spre publicare)
[19] E.O.Tuck, Some accurate solutions of the lifting surface integral equation,
J.Austral.Math.Soc.Ser.B, 35, 127-144 (1993)
[20] J.Weissinger, The lift distribution of swept-back wings, ARC R&M, No1120 (1947)
36





![Untitled-1 [fmi.unibuc.ro]fmi.unibuc.ro/ro/pdf/2009/master/prezentare_master_fmi.pdf · necesar (spre exemplu notiuni de teoria grupurilor, 'teoria modulelor inelelor, algebrä comutativä](https://static.fdocumente.com/doc/165x107/5e2eb61f1e31ef5c090ec521/untitled-1-fmi-fmi-necesar-spre-exemplu-notiuni-de-teoria-grupurilor-teoria.jpg)