Ing. Radu-Codruţ DAVID - Biblioteca Centrala...

If you can't read please download the document
Transcript of Ing. Radu-Codruţ DAVID - Biblioteca Centrala...
-
CONTRIBUII LA MODELAREA I OPTIMIZAREA SISTEMELOR DE
CONDUCERE FUZZY
CONTRIBUTIONS TO MODELING AND OPTIMIZATION OF FUZZY CONTROL SYSTEMS
REZUMATUL TEZEI DE DOCTORAT
Ing. Radu-Codru DAVID
CONDUCTOR TIINIFIC: PROF. DR. ING. Radu-Emil PRECUP UNIVERSITATEA POLITEHNICA TIMIOARA DEPARTAMENTUL DE AUTOMATIC I INFORMATIC APLICAT
TIMIOARA, 2015
-
CUPRINS
1. MOTIVAIA CERCETRII ................................................................... 3
2. PUNEREA PROBLEMEI PRIVIND ACORDAREA OPTIMAL A PARAMETRILOR
REGULATOARELOR FUZZY CU SENSIBILITATE PARAMETRIC REDUS ................ 6
3. ALGORITMI INSPIRAI DIN NATUR PENTRU ACORDAREA OPTIMAL A
PARAMETRILOR REGULATOARELOR FUZZY CU SENSIBILITATE PARAMETRIC
REDUS .......................................................................................... 14
4. ACORDAREA OPTIMAL A PARAMETRILOR FUNCIILOR DE APARTENEN DE
INTRARE A MODELELOR FUZZY TAKAGI-SUGENO BAZAT PE ALGORITMUL
SIMULATED ANNEALING ..................................................................... 21
5. CONTRIBUII, DIRECII VIITOARE DE CERCETARE I DISEMINAREA
REZULTATELOR ................................................................................. 27
6. BIBLIOGRAFIE SELECTIV ............................................................... 32
-
3
1. MOTIVAIA CERCETRII Una din variantele sistematice de ndeplinire a specificaiilor de performan aferente
sistemelor de conducere fuzzy (n particular, sistemelor de reglare fuzzy) implic acordarea parametrilor regulatoarelor sau modelelor fuzzy cu ajutorul problemelor de optimizare definite corespunztor astfel nct variabilele acestor probleme sunt parametrii de acordare. Specificaiile de performan sunt ndeplinite prin rezolvarea acestor probleme de optimizare care asigur acordarea optimal a parametrilor regulatoarelor i modelelor fuzzy. Acest proces poate conduce la probleme de optimizare multiobiectiv datorit complexitii proceselor, structurii i neliniaritilor regulatoarelor, care determin posibilitatea ca funciile obiectiv asociate problemelor de optimizare s fie neconvexe sau nedifereiabile.
Pentru sistemele de reglare automat, indicatorii de performan sunt exprimai de regul ca indicatori empirici afereni acestor sisteme (de exemplu, suprareglaj, timp de reglare, rezerv de faz, etc.). Una din abordrile des ntlnite, pentru asigurarea ndeplinirii specificaiilor de performan impuse/dorite ale sistemelor de conducere fuzzy (i ale sistemelor de reglare fuzzy), este definirea acestor specificaii prin intermediul unor probleme de optimizare bazate pe funcii obiectiv, care folosesc ca variabile parametrii de acordare ai regulatorului i sunt supuse unor restricii necesare formulate n manier adecvat. Valorile optimale ale parametrilor de acordare ai regulatorului sunt obinute prin rezolvarea acestor probleme de optimizare, care, n majoritatea cazurilor, urmrete minimizarea funciilor obiectiv i conduce la parametrii optimi. n cadrul acestei teze este abordat acordarea optimal a parametrilor regulatoarelor fuzzy n contextul descris anterior ca variant sistematic de proiectare i acordare a parametrilor acestor regulatoare neliniare.
Pentru modelarea i acordarea parametrilor sistemelor de reglare optimale, sunt folosite de regul modele liniare sau liniarizate ale proceselor conduse. ns procesele industriale sunt supuse variaiilor parametrice ale proceselor conduse, care pot determina sistemele s intre n stri nedorite sau chiar instabile. Pentru a evita aceste situaii, este necesar o analiz a sensibilitii n raport cu variaiile parametrilor proceselor conduse, iar n acest context sunt deduse modele de sensibilitate de stare n raport cu parametrii variabili ai acestor procese. Parametrii sunt considerai variabili dac modelele iniiale ale proceselor sunt neliniare i apoi liniarizate n vecintatea unor puncte de funcionare pentru a asigura proiectarea i acordarea parametrilor regulatorului n manier relativ facil i uor de neles. Funciile obiectiv considerate n cadrul acestei teze includ funciile de sensibilitate a ieirii n modelele de sensibilitate asociate, astfel c sunt obinute regulatoare optimale cu sensibilitate parametric redus deoarece sunt definite probleme de optimizare ce implic minimizarea acestor funcii obiectiv.
Rezolvarea problemelor de optimizare specifice acordrii optimale a parametrilor regulatoarelor fuzzy este o sarcin complicat datorit expresiilor complexe ale funciilor obiectiv i riscului de blocaj n puncte de minim local. Aceasta problem depinde de proces i de structura regulatorului fuzzy i a fost abordat, de exemplu, n [Fen06], [Prei06], [Oh11], [Pre11a], [Bla13], [Moh14]. Algoritmi inspirai din natur pot fi folosii cu succes n rezolvarea acestor probleme de optimizare datorit evitrii calculului derivatelor, care conduce la reducerea costurilor de implementare. Celelalte avantaje ale utilizrii algoritmilor inspirai din natur n rezolvarea acestor probleme de optimizare sunt transparena n proiectare, oferirea unor soluii de proiectare i implementare de tip low-cost automation i nlocuirea informaiei de gradient de valoarea efectiv calculat / evaluat a funciei obiectiv.
Primul obiectiv al cercetrilor efectuate n cadrul acestei teze este acordarea optimal a parametrilor regulatoarelor fuzzy prin folosirea algoritmilor inspirai din natur. Problemele de optimizare sunt definite astfel nct s includ funcii obiectiv care asigur reducerea sensibilitii n raport cu variaiile parametrilor proceselor conduse.
Problema modelrii fuzzy prin folosirea modelelor fuzzy de tip Takagi-Sugeno (T-S) a fost abordat recent n literatura de specialitate. Din cadrul aplicaiilor sugestive analizate n cadrul tezei sunt exemplificate urmtoarele: modele fuzzy T-S pentru lagrele magnetice din cadrul motoarelor de mare vitez [Wan10], un model fuzzy T-S aferent procesului de decelerare a autovehiculelor prin analiza procesului de frnare i modelului dinamic al comportamentului roii i vehiculului [Zhe11], estimarea temperaturii utiliznd o reea neuronal fuzzy care conine senzori inteligeni [Yon11], modele fuzzy de tip T-S n timp discret a sistemelor anti-blocaj al roilor (ABS) [Pre12c].
O calitate foarte bun a modelelor fuzzy de tip T-S este necesar att pentru modelarea fuzzy, pentru descrierea dinamicii si neliniaritilor proceselor dinamice, ct i pentru obinerea modelelor matematice simplificate care sunt utile n proiectarea bazat pe model (model-based design) a regulatoarelor fuzzy. Odat ce modelele fuzzy sunt obinute, n literatur sunt prezentate mai multe abordri pentru mbuntirea calitii (n spe, performanelor) acestora prin acordarea
-
4
optimal a parametrilor acestor modele, pe baza definirii adecvate a problemelor de optimizare care urmresc minimizarea funciilor obiectiv pentru a reduce ct de mult posibil erorile de modelare.
Lund n considerare structura modelelor fuzzy, pot fi acordai optimal diveri parametri ai fiecruia dintre aceste module: parametri din modulul de fuzzificare, parametri din mecanismul de inferen (incluznd baza de reguli i premizele regulilor modelelor fuzzy de tip T-S) i parametri din modulului de defuzificare. Unele din aplicaiile sugestive de acordare optimal a parametrilor modelelor fuzzy sunt axate pe: acordarea optimal a bazei de reguli i parametrilor mecanismul de inferen [Bod05], optimizarea bazei de reguli fuzzy [Cab06], acordarea parametrilor premizelor i concluziilor regulilor modelelor fuzzy de tip T-S [Alm10], reducerea bazei de reguli i mecanismului de inferen din cadrul regulatoarelor fuzzy [Pir13].
Al doilea obiectiv al cercetrilor efectuate n cadrul acestei teze este acordarea optimal a parametrilor funciilor de apartenen de intrare aferente modelelor fuzzy dinamice ale proceselor folosind algoritmi inspirai din natur. Problemele de optimizare sunt definite astfel nct s includ funcii obiectiv care asigur reducerea erorilor de modelare urmrind minimizarea funciilor obiectiv. Teza este axat pe acordarea optimal a unor parametri ai funciilor de apartenen de intrare aferente modelelor fuzzy de tip T-S.
Cele mai recente soluii pentru rezolvarea problemelor de optimizare care realizeaz acordare optimal a parametrilor regulatoarelor fuzzy i modelelor fuzzy sunt dezvoltate pe baza algoritmilor de optimizare inspirai din natur ce includ Clirea Simulat (SA) [Pre11c], [Pre12b], Particle Swarm Optimization (PSO) [Oh11], [Pre13a], Gravitational Search Algorithms (GSAs) [Dav13], [Pre13b], Charged System Search (CSS) algorithms [Pre14c], genetic algorithms [Oni12], Ant Colony Optimization [Cha12]. Aceste soluii sunt nglobate n ambele obiective ale tezei.
Structura tezei este compus din cinci capitole. Pentru simplitate, n cadrul acestui rezumat au fost reinute numerotrile ecuaiilor, tabelelor i graficelor folosite n tez precum i abrevierile pstrate n varianta din limba englez. n continuare este prezentat o scurt descriere a acestor capitole.
Capitolul 1 conine n prima parte o introducere n care este prezentat motivaia cercetrii. De asemenea, n acest capitol sunt introduse cele dou obiectivele ale cercetrii urmrite n cadrul acestei teze: acordarea optimal a parametrilor regulatoarelor fuzzy prin folosirea algoritmilor inspirai din natur i acordarea optimal a parametrilor funciilor de apartenen de intrare aferente modelelor fuzzy dinamice ale proceselor folosind algoritmi inspirai din natur. n cea de-a doua parte a acestui capitol este discutat structura tezei.
n capitolul 2 este introdus, pentru nceput, o metod de proiectare i acordare pentru regulatoare fuzzy proporional-integratoare (fuzzy-PI) de tip T-S pentru servosisteme neliniare cu sensibilitate parametric redus. Clasa de servosisteme neliniare este structurat ca o conexiune serie de elemente liniare de ordinul doi cu dinamic i component integratoare, cu neliniaritate static de tip saturaie i zon moart plasat pe intrarea procesului.
Metoda de proiectare asigur acordarea parametrilor regulatoarelor fuzzy prin rezolvarea a patru tipuri de probleme de optimizare, care constituie primul obiectiv al acestei teze teze, folosind algoritmi de optimizare inspirai din natur. Sunt definite problemele de optimizare mpreun cu funciile obiectiv corespunztoare i restriciile impuse variabilelor.
n cea de-a doua parte a capitolului este pus n eviden motivaia folosirii algoritmilor inspirai din natur n rezolvarea problemelor de optimizare eferente metodei de proiectare. Motivaia este susinut de o cercetare bibliografic a literaturii recente de specialitate.
Capitolul este ncheiat prin menionarea principalelor contribuii revendicate de autor, susinute de lucrrile publicate i indexrile n baze de date internaionale aferente acestora.
n capitolul 3 sunt propuse soluii bazate pe algoritmi inspirai din natur folosite n rezolvarea problemelor de optimizare definite n cadrul capitolului anterior. Din cei apte algoritmi folosii, patru sunt variante standard ale Simulated Annealing (clirii simulate), Particle Swarm Optimization, Gravitational Search Algorithms i Charged System Search, unul din algoritmi este o variant hibridizat bazat pe Particle Swarm Optimization i Gravitational Search Algorithm, iar ultimii doi sunt versiuni adaptive ale algoritmilor Gravitational Search Algorithms i Charged System Search, care folosesc modificri ale parametrilor bazate pe un model de nvare. Cei apte algoritmi inspirai din natur sunt implementai n cadrul pasului 4 al metodei de proiectare dedicat regulatoarelor fuzzy-PI de tip T-S descris n capitolul 2.
Rezultatele aferente fiecrei probleme de optimizare sunt obinute n urma mai multor rulri ale algoritmilor i sunt prezentate mpreun cu valorile optimale ale parametrilor regulatoarelor i cu valorile minime ale funciilor obiectiv. Pentru validarea metodei propuse sunt prezentate att rezultate de simulare ct i rezultate experimentale, cu exemple pentru fiecare soluie bazat pe algoritmi inspirai din natur. Procesul de cutare este descris pentru fiecare soluie propus printr-un set de grafice n care este prezentat evoluia agenilor de explorare.
-
5
Calitatea rezultatelor obinute este apoi evaluat pe baza a trei indicatori originali de performan (calitate). Aceti indicatori msoar i evalueaz convergena soluiilor prin monitorizarea valorilor medii ale funciilor obiectiv pentru un numr de rulri, numrul mediu de iteraii necesare pentru ilustrarea vitezei de convergen, respectiv precizia soluiei.
n finalul capitolului sunt puse n eviden noile contribuii, care sunt consemnate mpreun cu lucrrile publicate care le sprijin i indexrile acestor lucrri n baze de date internaionale.
Capitolul 4 este dedicat rezolvrii a dou probleme de acordare optimal a unor parametri ai funciilor de apartenen de intrare aferente modelelor fuzzy T-S obinute prin aplicarea principiului echivalenei modale. Modelele fuzzy T-S sunt aplicate pe dou echipamente de laborator: un sistem anti-blocaj al roilor i un sistem cu levitaie magnetic. Abordarea de modelare propus n cadrul acestui capitol folosete algoritmul Simulated Annealing pentru optimizarea parametrilor modelelor fuzzy T-S.
Abordarea de modelare propus se difereniaz de alte abordri prin faptul c pornete de la modelul matematic primar al procesului i ofer un avantaj prin verificarea performanelor modelelor fuzzy T-S optimale folosind experimente n timp real pe cele dou echipamente de laborator. Un alt aspect important al abordrii de modelare propuse este aplicabilitatea acesteia unei game largi de procese industriale prin generalizri adecvate cu grad de complexitate relativ redus.
Dei prin aceast abordare de modelare nu poate fi garantat atingerea minimului global al funciei obiectiv, este observat o reducere considerabil a valorilor acestor funcii obiectiv pe parcursul experimentelor. Se indic, astfel, o mbuntire clar a performanelor oferite prin modelele fuzzy optimale de tip T-S.
n final sunt prezentate noile contribuii extrase din rezultatele de cercetare oferite n cadrul acestui capitol, mpreun cu lucrrile publicate care le susin i indexrile acestor lucrri n baze de date internaionale.
Capitolul 5 este structurat n trei subcapitole. n primul subcapitol sunt sintetizate concluziile capitolelor anterioare. n cel de-al doilea subcapitol sunt prezentate direciile viitoare de cercetare. Cel de-al treilea subcapitol este dedicat diseminrii rezultatelor cercetrii, prin prezentarea acestora sub forma unei liste de publicaii, mpreun cu factorii de impact i indexrile n baze de date internaionale i prin menionarea citrilor independente ale acestor lucrri mpreun cu factorii de impact.
-
6
2. PUNEREA PROBLEMEI PRIVIND ACORDAREA OPTIMAL A PARAMETRILOR REGULATOARELOR FUZZY CU SENSIBILITATE
PARAMETRIC REDUS Structura sistemului de reglare fuzzy este prezentat n fig. 2.1 sub forma unui sistem de
reglare automat convenional (bucl de reglare) cu regulator fuzzy cu filtru de referin dedus din [Pre09a], n care FC este regulatorul fuzzy (fuzzy controller), P este procesul condus, F este filtrul de referin, r este referina, r1 este referina filtrat, d este perturbaia, y este ieirea reglat, u este comanda, e este eroarea de reglare: yre = 1 , (2.1)
P
P
mTm R = ]...[ 21 este vectorul parametrilor procesului cu elementele Pm...1 , = , care
reprezint parametrii procesului, qTq R = ]...[ 21 este vectorul parametrilor regulatorului
cu elementele q...1 , = , care sunt parametrii de acordare ai regulatorului, parametrii filtrului pot
fi inclui n acest vector dup cum este indicat n fig. 2.1 i indicele superior T indic transpusa matricei. Structura de reglare fuzzy prezentat n fig. 2.1 aparine structurilor de reglare cu dou grade de libertate (2-DOF).
Fig. 2.1. Structura sistemului de reglare fuzzy.
Dup cum este artat n [Ara03], [Vis04], [Vra11], [Iwa12], [Kan12], [Pel12], [Sza12], [Vil12], [Kum13], structurile de reglare 2-DOF (cu regulatoare de tip PI i PID) au avantajul unor performane mai bune comparativ cu sistemele de reglare cu un singur grad de liberate (1-DOF) n raport cu referina i cu perturbaiile. Cea mai important limitare a regulatoarelor liniare 2-DOF este faptul c reducerea suprareglajului este compensat printr-un timp de reglare mai mare n rspunsurile sistemului la modificrile referinei. Introducerea logicii fuzzy n structura sistemelor de reglare 2-DOF conduce la o performane mbuntite ale sistemelor de reglare automat; unele rezultate foarte bune n diverse aplicaii sunt prezentate n [Pre09a], [Prei10], [Dra11a], [Pre11a] [Liu12], [Sil12], [Sti12b], [Pre13a].
n cadrul acestei teze va fi considerat un filtru de referin F ferm (crisp). Acest filtru poate fi considerat, de asemenea, ca un bloc cu logic fuzzy ce va fi modelat i acordat optimal, dar aceasta reprezint o direcie viitoare de cercetare. n fig. 2.1 sunt ilustrate: filtrul de referin F liniar, regulatorul fuzzy FC ca un sistem neliniar i procesul neliniar P.
Procesul condus este descris printr-un model de stare cu timp discret monovariabil la intrare i ieire (SISO) [Pre13a]:
,)(
)),(,),(()(
)),(),(,),(()1(
00 PdP
ddPPdd
dddPPddP
t
tdtgty
tdtutt
xx
x
xfx
=
=
=+
(2.2)
n care N0dt este momentul de timp iniial, Ndd tt , , 0dd tt , este argumentul de timp discret, nT
nPPPP xxx Rx = ]...[ ,2,1, este vectorul de stare aferent procesului, n
P Rx 0 este vectorul iniial
de stare aferent procesului i funciile nmnPd P RRf ++ 2
: i RR ++ 1: PmnPdg sunt derivabile n
raport cu parametrul Pm...1 , = . Modelul de stare prezentat n (2.2) este un model neliniar fr
conexiune direct de la intrare la ieire i poate fi obinut, prin discretizare, dintr-un model de stare SISO cu timp continuu acceptnd c intrrile u i d sunt constante pe intervalele de eantionare i prezena extrapolatorului de ordin zero (zero-order hold, ZOH).
Filtrul de referin este descris prin urmtorul model de stare cu timp discret, care poate fi dedus, de asemenea, din modelul de stare SISO cu timp continuu:
,)(
)),(,),(()(
)),(,),(()1(
00
1
FdF
ddFFdd
ddFFddF
t
trtgtr
trtt
xx
x
xfx
=
=
=+
(2.3)
-
7
n care FF
nTnFFFF xxx Rx = ]...[ ,2,1, este vectorul de stare aferent filtrului de referin i
FnF Rx 0 este vectorul de stare iniial aferent filtrului de referin. Funciile FF
nqnFd RRf
++ 1: i
RR ++ 1: qnFd Fg contribuie la asigurarea derivabilitii modelului de stare al sistemului de reglare
fuzzy n raport cu parametrul Pm...1 , = .
Regulatorul fuzzy este caracterizat prin modelul de stare SISO cu timp discret:
,)(
)),(,),(()(
)),(,),(()1(
00 CdC
ddCCdd
dCCddC
t
tetgtu
tett
xx
x
xfx
=
=
=+
(2.4)
n care CC
nTnCCCC xxx Rx = ]...[ ,2,1, este vectorul de stare aferent regulatorului, C
nC Rx 0 este
vectorul iniial de stare aferent regulatorului. Funciile CC nqnCd RRf ++ 1
: i RR ++ 1: qnCd Cg din
modelul (2.4) contribuie la asigurarea derivabilitii modelului de stare al sistemului de reglare fuzzy n raport cu parametrul Pm...1 , = . n plus, convergena funciilor obiectiv necesit ca
regulatorul s aib o component integratoare pentru a asigura valoarea nul a erorii de reglare e n regim staionar constant pentru anumite tipuri de intrri de referin i perturbaie.
Vectorul de stare aferent procesului Px , vectorul de stare aferent regulatorului Cx i
vectorul de stare aferent filtrului de referin Fx sunt grupai n vectorul de stare aferent
sistemului de reglare x:
....1
,...1 if,
,...1 if,
,...1 if,
,]...[
,
,
,
21
FC
FCCnnF
CnC
P
nnnTnnn
F
C
P
nnn
nnnnnx
nnnx
nx
x
xxx
C
FC
FC
++=
++++=
++=
=
=
=
=
++++
R
x
x
x
x
(2.5)
Modelele de stare (2.2) (2.4) sunt grupate folosind relaiile (2.1) i (2.5). Rezult urmtorul model de stare cu timp discret aferent sistemului de reglare fuzzy:
,)(
)),(,),(())(,),(()(
,])(...)()([))(),(,,),((
))(,),((
)]}(,),([)](,),([,),({
))()]},(,),([)](,),([,),({,),((
)1(
0
0
0
0
21
=
==
==
=+
++
F
C
P
d
ddPdddPPdd
Tdnnndddddd
ddFFd
ddPPdddFFddCCd
dddPPdddFFddCCddPPd
d
t
tdthtdtgty
tftftftdtrt
trt
tdtgtrtgt
tdtdtgtrtgtgt
t
FC
x
x
x
x
xx
xf
xf
xxxf
xxxxf
x
(2.6)
n care funciile FCPFC nnnqmnnnd+++++++ RRf 2: i RR ++++ 1: PFC mnnnPdh sunt derivabile n raport cu
parametrul Pm...1 , = .
Funciile de sensibilitate a strilor FC nnn ++= ...1 ,, i funcia de sensibilitate a ieirii
n raport raport cu parametrul Pm...1 , = , sunt definite dup cum urmeaz [Ros00]:
PFC mnnnyx
...1 ,...1 , ,
00
, =++=
=
=
, (2.7)
n care indicele inferior 0 indic valoarea nominal a parametrului procesului Pm...1 , = , ce este
supus variaiilor. Aceste variaii justific reducerea sensibilitii i acordarea parametrilor regulatoarelor fuzzy cu sensibilitate parametric redus.
Folosind relaiile (2.7) pentru a calcula derivatele pariale ale variabilelor din modelul (2.6), modelele de sensibilitate ale sistemului de reglare fuzzy n raport cu parametrul procesului
Pm...1 , = obin expresiile:
-
8
....1 ,...1 ,0)(
,)(
)}()(
{)(
,)(
)}()(
{)1(
0,
0
,
1 0
0
,
1 0
,
PFCd
dPdd
ndPd
d
dd
nnn
dd
mnnnt
tht
x
tht
tft
x
tft
FC
=++==
+
=
+
=+
=
++
=
(2.8)
Valorile iniiale ale variabilelor de stare sunt importante n analiza modelelor de sensibilitate prezentate n relaia (2.8).
Pentru a asigura reducerea sensibilitii n raport cu modificrile parametrului Pm...1 , = ,
sunt definite urmtoarele funcii obiectiv n timp discret:
Pt
dd mtteJ
d
...1 ,})],([)(),({)(
0
222,1 =+=
=
, (2.9)
Pt
dd mtteJ
d
...1 ,})],([)(|),({|)(
0
22,2 =+=
=
, (2.10)
Pt
ddd mttetJ
d
...1 ,})],([)(),({)(
0
222,3 =+=
=
, (2.11)
Pt
ddd mttetJ
d
...1 ,})],([)(|),(|{)(
0
22,4 =+=
=
, (2.12)
n care Pm...1 , = , este parametrul de ponderare. Funcia obiectiv )(,1 J este definit ca suma
ptratelor erorilor de reglare i ptratelor funciei de sensibilitate a ieirii, funcia obiectiv )(,2 J
este definit ca suma modulelor erorii de reglare i ptratelor funciei de sensibilitate a ieirii, funcia obiectiv )(,3 J este definit ca suma ptratelor erorilor de reglare nmulite cu timpul i
ptratelor funciei de sensibilitate a ieirii i funcia obiectiv )(,4 J este definit ca suma
modulelor erorii de reglare nmulite cu timpul i ptratelor funciei de sensibilitate a ieirii, toate aceste patru variante de sume fiind ponderate prin parametrul Pm...1 , = . Vectorul variabilelor
funciilor obiectiv va fi omis, n continuare, pentru simplificarea notaiilor. Convergena funciilor obiectiv definite n (2.9) (2.12) necesit ca valorile de regim
staionar constant ale funciilor din membrul drept s fie nule. ntruct valorile nule de regim staionar constant ale ale erorii de reglare e pentru unele tipuri de perturbaii sunt garantate de regulatoarele cu component integratoare, sunt, de asemenea, necesare valori nule de regim staionar constant ale funciei de sensibilitate a ieirii
.
Minimizarea funciilor obiectiv definite n relaiile (2.9) (2.12) urmrete reducerea sensibilitii i este exprimat sub forma problemelor de optimizare:
PD
mJ ...1 ),(minarg ,1
* ==
, (2.13)
PD
mJ ...1 ),(minarg ,2
* ==
, (2.14)
PD
mJ ...1 ),(minarg ,3
* ==
, (2.15)
PD
mJ ...1 ),(minarg ,4
* ==
(2.16)
n care * este vectorul parametrilor optimali ai regulatorului, adic valoarea optimal a vectorului i D este domeniul admisibil (fezabil) al lui . n domeniul D pot fi impuse diverse restricii
inclusiv cele legate de stabilitatea sistemului de reglare fuzzy. Astfel de restricii pot fi exprimate sub forma unor condiii de stabilitate care pot fi deduse n general pentru sisteme neliniare [Pas04], [Dan05], [Pre06a], [Pre07], [Li10], [Bla11], [Vil13] sau n particular pentru sisteme de reglare fuzzy cu regulatoare de tip Mamdani [Pre97], [Sug99], [Pre06b], [Liu10b] sau cu regulatoare fuzzy de tip Takagi-Sugeno [Fen06], [Pre09c], [Pre11a], [Pre13e], [Cha14] i pot lua n considerare diverse regimuri de funcionare a sistemelor de reglare automat [Car05], [Fil08], [Fil09], [Dan11], [Wan12b], [Fer13], [Hus13], [Cor14], [Wu14].
-
9
n cadrul acestei teze au fost considerate doar funciile de sensibilitate a ieirii n expresiile funciilor obiectiv (2.9) (2.12). Introducerea funciilor de sensibilitate a strilor n funciile obiectiv poate fi luat n vedere ca direcie viitoare de cercetare.
Procesul din cadrul servosistemelor este caracterizat prin urmtorul model de stare SISO cu timp continuu, care definete o clas general de servosisteme:
),( ]01[)(
),( 0
1)(
0)( 10
10
)(
,)( if,1
,)( if,)(
,|)(| if,0
,)( if,)(
,)( if,1
)(
tty
tdtmt
T
t
utu
utuuuu
utu
utuu
utuuuu
utu
utu
tm
P
T
kPP
b
baab
a
ac
cbcb
c
b
P
x
xx
=
+
+
=
-
10
icCi
Ci
c TkksT
ks
sTksC =+=
+= ),
11()
1()( , (2.22)
n care ck este coeficientul de transfer al regulatorului i iT este constanta de timp de integrare.
Regulatoarele PI pot fi acordate prin metoda Extended Symmetrical Optimum (ESO) [Prei99] pentru garantarea unui compromis ntre specificaiile de performan (exprimate pe baza valorilor maxime ale indicatorilor de caliatate ai sistemului de reglare automat) impuse sistemului de reglare automat folosind un singur parametru de proiectare denumit , cu valori recomandate n intervalul 201 < . Diagramele prezentate n fig. 2.3 pot fi utilizate n alegerea unei valori a parametrului de proiectare ; rezult un compromis ntre indicatorii de calitate ai sistemului de reglare automat, n spe suprareglajul exprimat n procente [%] 1 , timpul de reglare st i timpul
de cretere rt .
Fig. 2.3. Indicatorii de calitate ai sistemului de reglare automat n raport cu referina n funcie de
parametrul de proiectare n metoda ESO.
Relaiile de acordare a parametrilor regulatoarelor PI prin metoda ESO sunt [Prei99]:
===Tk
kTTTk
k
EP
Ci
EP
c
1 , ,
12
. (2.23)
Fig. 2.3 este important deoarece ambele valori posibile ale EPk conform (2.20) ar trebui
s fie folosite n stabilirea acelor valori ale lui ce asigur ndeplinirea specificaiilor de performan impuse sistemului de reglare automat. Poate fi utilizat urmtoarea variant relativ simpl a filtrului de referin ce asigur mbuntirea performanelor sistemului de reglare automat liniar prin anularea unui zero n funcia de transfer n bucl nchis n raport cu referina:
sT
sF+
= 1
1)(
. (2.24)
Regulatoarele fuzzy-PI de tip Takagi-Sugeno (T-S PI-FCs) sunt proiectate pornind de la regulatoare PI liniare n vederea mbuntirii suplimentare a indicatorilor de calitate ai sistemelor de reglare automat pentru clasa de procese neliniare modelate n relaia (2.17). Structura i funciile de apartenen de intrare aferente unui T-S PI-FC simplu sunt prezentate n fig. 2.4, n
care 1q este operatorul de ntrziere cu un pas (de eantionare).
Fig. 2.4. Structura i funciile de apartenen de intrare aferente regulatorului fuzzy-PI de tip
Takagi-Sugeno.
Fig. 2.4 ilustreaz incrementul erorii de reglare )1()()( = ddd tetete i incrementul
comenzii )1()()( = ddd tututu . Aceste incremente ofer dinamica T-S PI-FS i rezult din
discretizarea regulatorului PI cu timp continuu. Metoda lui Tustin de discretizare conduce la forma incremental a regulatorului PI cu timp discret: )]( )([)( ddPd teteKtu += (2.25)
i la expresiile parametrilor acesteia:
-
11
si
ssicP
TT
TTTkK
==
2
2 ),
2( , (2.26)
n care sT este perioada de eantionare definit conform cerinelor reglrii numerice cvasi-continue
[Ise89]. Blocul fuzzy cu dou intrri i o ieire (TISO-FC) prezentat n fig. 2.4 este caracterizat prin
metoda mediei ponderate n modulul de defuzzificare i prin operatorii SUM i PROD n mecanismul de inferen. Baza de reguli a blocului TISO-FC este definit cu ajutorul a dou funcii: )( )( )],( )([)( 121 dCdCddPdC tftfteteKtf =+= . (2.27)
Parametrul este introdus n relaia (2.27) pentru a reduce suprareglajul sistemului de reglare fuzzy cnd )( dte i )( dte sunt de acelai semn. Fig. 2.4 i tabelul 2.1 pun n eviden
parametrii de acordare ai acestor T-S PI-FC relativ simple: (pentru proiectarea prii liniare a regulatoarelor), eB , eB i (pentru proiectarea prii fuzzy a regulatoarelor).
Baza de reguli prezentat n tabelul 2.1 poate fi formulat astfel nct s conin doar dou reguli deoarece utilizatorii sunt interesa n acordarea parametrilor unor T-S PI-FC simple. Simplitatea este asigurat de doar dou reguli din cauza numrului redus de funcii de apartenen de intrare ilustrate n fig. 2.4, de simetria bazei de reguli i de metoda de proiectare simpl dedicat T-S PI-FC.
Tabelul 2.1. Tabelul de decizie aferent blocului TISO-FC.
)(te )(te
N ZE P
P )()( 1 dCd tftu = )()( 1 dCd tftu = )()( 2 dCd tftu =
ZE )()( 1 dCd tftu = )()( 1 dCd tftu = )()( 1 dCd tftu =
N )()( 2 dCd tftu = )()( 1 dCd tftu = )()( 1 dCd tftu =
Principiul echivalenei modale [Gal95] conduce la urmtoarea relaie de acordare, care
reduce numrul parametrilor de acordare ai T-S PI-FC: ee BB = . (2.28)
Prin aplicarea metodei ESO i a principiului echivalenei modale se obin doar trei parametri de acordare ai T-S PI-FC, deci 3=q . Aceti parametri sunt inclui n vectorul parametrilor regulatorului inclus n problemele de optimizare definite n relaiile (2.13) (2.16):
==== 321321 , , ,][ eT B . (2.29)
Metoda de proiectare dedicat T-S PI-FC simple cu structura definit anterior const n
parcurgerea pailor urmtori, care conduc la vectorul parametrilor optimali ai regulatorului * , obinut cu ajutorul algoritmilor inspirai din natur:
Pasul 1. Este aplicat metoda ESO pentru acordarea parametrilor regulatorului PI cu timp continuu, este aleas valoarea perioadei de eantionare, este aplicat metoda lui Tustin care duce la (2.26), sunt deduse modelele de sensibilitate n raport cu Pk i T , sunt introduse modelele de
sensibilitate n structura sistemului de reglare fuzzy implicat n simulri i experimente pentru evaluarea funciilor obiectiv.
Pasul 2. Sunt stabilite valorile parametrilor de ponderare Pm...1 , = , din funciile obiectiv
definite n (2.9) (2.12), pentru ndeplinirea specificaiilor de performan ale sistemelor de reglare fuzzy, este definit momentul de timp discret final dft pentru a nlocui n relaiile (2.9) (2.12) astfel nct orizontul de timp finit s includ toate regimurile tranzitorii posibile ale sistemului de reglare fuzzy pn cnd funciile obiectiv ating valori constante, este definit domeniul admisibil D astfel nct acesta s includ toate restriciile impuse elementelor lui .
Pasul 3. Este asigurat legtura dintre problemele de optimizare (2.13) (2.16) i algoritmii de optimizare inspirai din natur.
Pasul 4. Sunt aplicai algoritmii inspirai din natur pentru obinerea vectorul parametrilor optimali ai regulatorului i a valorilor optimale a acestor parametri:
*3**
2**
1**
3*
2*1
* , , ,][ ==== eT B (2.30)
i este aplicat urmtoarea relaie de acordare obinut din relaia (2.28) pe baza relaiilor (2.23) i (2.26) aplicate pentru parametrii optimali ai regulatorului:
-
12
**
* 2
2e
s
se B
TT
TB
=
. (2.31)
Metoda de proiectare este aplicat i validat n proiectarea T-S PI-FC n cadrul unui studiu de caz care urmrete reglarea poziiei unghiulare a unui stand experimental construit n jurul unui echipament de laborator bazat pe un servosistem de curent continuu [Int07b]. Standul experimental este ilustrat n fig. 2.6 i fig. 2.7. Semnalele PWM aplicate procesului sunt proporionale cu semnalul de comand produs de regulator. Caracteristicile principale ale standului experimental sunt [Int07b]: amplitudinea comenzii de V 24 , curentul de A 1.3 , cuplul de cm N 15 , turaia de rpm 3000 i masa inerial de tip sarcin de kg 03.2 . Valorile nominale ale parametrilor procesului modelat n relaiile (2.7) i (2.20), obinute prin metoda celor mai mici ptrate, sunt
15.0=au , 1=bu , 15.0=cu , 14000 == EPP kk i s 92.00 =T .
Fig. 2.6. Structura standului experimental utilizat n experimente.
Fig. 2.7. Standul experimental din Laboratorul de conducere inteligent a proceselor din cadrul
Universitii Politehnica Timioara.
Parametri de ponderare din funciile obiectiv (2.9) (2.12) au fost definii astfel nct s se obin un raport de {0, 0.1, 1, 10} ntre valorile iniiale ale primului i celui de-al doilea termen al sumelor. Au fost obinute urmtoarele valori, care sunt utilizate ulterior n cadrul tezei:
- pentru )(,1 PkJ :
}35721357,0.210.0,0021357.0,0{)( 2 Pk
, (2.61)
- pentru )(,1 TJ :
}1871.7187,17.,17187.0,0{)( 2 T
, (2.62)
- pentru )(,2 PkJ :
}86858,0.6850.0,006858.0,0{)( 2 Pk
, (2.63)
- pentru )(,2 TJ :
}69566695,0.660.0,0066695.0,0{)( 2 T
, (2.64)
-
13
- pentru )(,3 PkJ :
}187,391.873.9187,39.,0{)( 2 Pk
, (2.65)
- pentru )(,3 TJ :
}.9338.693,386,8693.3,0{)( 2 T
, (2.66)
- pentru )(,4 PkJ :
}1.42,14.2,142.0,0{)( 2 Pk
, (2.67)
- pentru )(,4 TJ :
}85,15.88515885,1.58.0,0{)( 2 T
. (2.68)
Variabilele funciilor obiectiv sunt iniializate lund n considerare urmtoarele limite care definesc spaiul de cutare D , care este n acelai timp i domeniul admisibil pentru :
}75.025.0|{}4020|{}173|{ = ee BBD . (2.69)
Algoritmii inspirai din natur prezentai n capitolul urmtor au fost rulai pentru regimul dinamic caracterizat printr-o modificare de tip treapt a referinei, rad 400 == rr i o intrare de
perturbaie nul, 00 == dd .
Pentru garantarea stabilitii sistemelor de reglare fuzzy pentru fiecare soluie potenial aparinnd spaiului de cutare D cu parametrii acordai ai regulatorului fuzzy, este impus o
restricie suplimentar de tip inegalitate care asigur convergena funciei obiectiv: |)()(||)()(| 0trtrtrty dydd . (2.70)
n care t0 este timpul iniial, td este timpul final i 001.0=y pentru o zon de linitire de 2% specific
definirii timpului de reglare. Condiia (2.70) este verificat n regimurile staionare constante, astfel c teoretic dt dup cum este artat n (2.9) (2.12), dar td ia practic valori finite pentru a
surprinde regimurile tranzitorii n rspunsurile sistemului de reglare fuzzy. Condiia (2.70) garanteaz stabilitatea sistemelor de reglare fuzzy, i de asemenea, asigur valoarea nul a erorii de reglare n regimuri staionare constante.
n continuare, subcapitolul 2.2 este dedicat unui studiu bibliografic privind aplicaiile algoritmilor inspirai din natur n acordarea optimal a parametrilor regulatoarelor fuzzy.
Capitolul se ncheie cu prezentarea contribuiilor autorului.
-
14
3. ALGORITMI INSPIRAI DIN NATUR PENTRU ACORDAREA OPTIMAL A PARAMETRILOR REGULATOARELOR FUZZY CU
SENSIBILITATE PARAMETRIC REDUS Simulated Annealing (SA, clirea simulat) este un algoritm de optimizare care imit
procesul metalurgic de clire [Kir83]. n general, cnd o substan este supus unui proces de clire, aceasta este iniial nclzit pn cnd este atins temperatura de topire, iar apoi este rcit lent, n mod controlat, pn cnd se resolidific. Proprietile substanei astfel obinute depind n mare msur de viteza de rcire; dac rcirea este rapid, substana va fi uor casabil din cauza unei structuri imperfecte, dac rcirea este lent, structura rezultat va fi bine organizat i puternic. De exemplu, unul din programele utilizate de regul la scderea temperaturii la fiecare pas are expresia:
kcsk =+1 , (3.1)
n care 1 const,
-
15
Fig. 3.1.1. Organigrama algoritmului SA.
Fig. 3.2.1. Organigrama algoritmului PSO.
-
16
Gravitational Search Algorithm (GSA) [Ras07], [Ras09] este un algoritm de optimizare, inspirat din legile gravitaiei i dinamicii [Sch03], [Hol05]. Conform acestor legi, fora gravitaional dintre dou particule este direct proporional cu produsul maselor i invers proporional cu ptratul distanei dintre acestea, iar aplicarea unei fore unei particule conduce la acceleraie, care depinde de for i de masa acesteia. Deprecierea valorii constantei gravitaionale n funcie de timp, specific vrstei universului, este exprimat, de regul, cu ajutorul funciilor liniare sau exponeniale.
n GSA agenii de cutare sunt considerai ca particule [Ras10], iar performanele lor sunt msurate folosind masele acestora. n GSA, fiecare particul are patru caracteristici: poziie, mas inerial, mas gravitaional activ i mas gravitaional pasiv [Ras07], [Ras09]. Poziia particulelor corespunde unei soluii a problemei, iar masele gravitaionale i ineriale sunt determinate prin evaluarea valorilor funciilor obiectiv. Prin trecerea timpului (n spe, prin parcurgerea iteraiilor algoritmului) este de ateptat ca particulele s fie atrase de ctre alte particule cu greutate mai mare.
Considernd N mase (ageni) i un spaiu de cutare q-dimensional, poziia agentului i este definit de vectorul: Nixxx Tqi
d
iii ...1 ,]......[1 ==X , (3.11)
n care dix este poziia agentului i n dimensiunea d.
Toate aceste particule exercit fore de atracie gravitaional ntre ele, iar aceste fore determin o micare global a tuturor particulelor nspre cele cu mase mari. Micarea este descris cu ajutorul relaiilor:
),1()()1(
),()()1(
++=+
+=+
kvkxkx
kakvkv
di
di
di
di
dii
di (3.16)
n care i , 10 i , este o variabil aleatoare uniform distribuit, )(kvdi este viteza agentului i la
iteraia k n dimensiunea d, )(kadi este acceleraia agentului i la iteraia k n dimensiunea d:
)(/)()( kmkFka ididi = , (3.15)
)(kmi este masa inerial relativ agentului i, fora total ce acioneaz asupra acestuia are
expresia:
)]()([)(
)()()()(
,1
kxkxkr
kmkmkgkF
di
dj
ij
jiN
ijj
jdi +
= =
, (3.12)
j , 10 j , este un parametru aleator, )(km j este masa agentului j, 0> este o constant cu
valoare neglijabil i )(krij este distana euclidian dintre agenii i i j.
n fig. 3.3 este prezentat organigrama algoritmului GSA. Masele sunt calculate pe baza relaiilor:
,)(/)()(
)],()(/[)]()([)(
1
=
=
=N
j
jii
ii
knknkm
kwkbkwkfkn
(3.17)
n care )(kf i este valoarea funciei obiectiv a agentului i la iteraia k, )(min)(,1
kfkb jNj=
= este valoarea
minim a funciei obiectiv i )(max)(,1
kfkw jNj=
= este valoarea maxim a funciei obiectiv.
Din cele prezentate anterior rezult c masele interacioneaz prin fore gravitaionale. Particulele cu mase mari care corespund soluiilor favorabile, de exemplu, celor apropiate de punctul de minim se deplaseaz mai lent dect cele cu mase reduse, acest lucru garantnd partea de exploatare a algoritmului.
Pentru a rezolva unele limitri observate n folosirea variantelor standard ale acestor algoritmi inspirai din natur, a fost propus hibridizarea acestora. Un astfel de exemplu este hibridizarea PSO i GSA [Mir10], prin care a fost obinut o tehnic de cutare mbuntit prin mbinarea avantajelor celor doi algoritmi. Pentru a obine acest lucru, a fost preluat din PSO abilitatea de gndire colectiv i de exploatare, peste care a fost suprapus tehnica de cutare i abilitile de explorare specifice GSA.
n algoritmul PSO-GSA hibrid a fost pstrat mecanismul de baz bazat pe particule (denumite i ageni) aferent PSO. Astfel, particulele sunt caracterizate n continuare prin vectori de poziie i vitez.
-
17
Fig. 3.3. Organigrama algoritmului GSA.
Algoritmul Charged System Search (CSS) folosete legi din electrostatic i din dinamic
[Kav10], [Kav10b], [Kav10c]. CSS conine un numr N de ageni, care sunt denumii particule ncrcate. Fiecare agent i este considerat o sfer ncrcat (cu sarcin electric) )(iq , iar mrimea acesteia la iteraia k este calculat pe baza relaiei: Ni
kgkg
kgkgkq
worstbest
bestiic ...1 ,
)()(
)()()(, =
= , (3.22)
n care )(kgbest i )(kgworst sunt cea mai bun i respectiv cea mai slab valoare a funciei obiectiv
aferente tuturor sarcinilor la iteraia k, iar )(kgi reprezint valoare funciei obiectiv corespunztoare
sarcinii i la iteraia k. Agenii exercit o for electric asupra altor ageni, calculat cu formula:
=+=
,otherwise ),0,1(
,)( if ),1,0(),( )),()(()
)(
)()()(()()( 21
,2
2
3
1 akriikkc
kr
ikq
a
ikrkqkqk
ij
jii
jiij
ij
jijjii XXF
(3.25)
n care )(krij
este distana de separare a dou sarcinii, la iteraia k, exprimat sub forma:
},,{ ,)( ,
)(||)(2
))()((||
||)()(||)( bestjiok
kkkk
kkkr s
qo
ibestji
jiij
++
= RX
XXXX
XX
, (3.23)
Xi(k) i Xj(k) sunt poziiile sarcinilor i i j la iteraia k, Xbest(k) este poziia celei mai bune sarcini la iteraia k, iar este o constant pozitiv de valoare neglijabil.
Parametrul ijc din relaia (3.10) determin tipul i gradul interaciunii unei sarcini i asupra
alteia j i este calculat cu formula:
-
18
n care 1ir i 2ir sunt numere aleatoare distribuite uniform n intervalul [0, 1], mj(k) este masa
sarcinii j la iteraia k, de regul considerat egal cu )(kq j , k este pasul de timp considerat de
valoare 1, )(kka este un coeficient de acceleraie la iteraia k i )(kkv este un coeficient de vitez la
iteraia k, calculai conform relaiilor: )1(5.0)( ),1(3)(
maxmax k
kkk
k
kkk va +== , (3.27)
iar maxk este numrul maxim de iteraii.
Folosirea acestor legi determin un compromis ntre abilitile de explorare i exploatare a algoritmului i determin utilizarea relativ simpl a CSS n problemele de optimizare n timp continuu i n timp discret.
O particul interacioneaz cu alte particule prin cmpuri electrice. Mrimea forei rezultante este determinat folosind legile electrostaticii, iar deplasarea este calculat folosind legile dinamicii. O sarcin cu rezultate bune exercit o for de atracie proporional cu intensitatea sa asupra celorlalte sarcini, iar n mod opus o sarcin cu rezultate mai slabe va exercita o for de respingere, astfel manifestndu-se proprietile de explorare i exploatare ale algoritmului CSS. Acest proces de cutare este descris n fig. 3.4.
Fig. 3.4. Organigrama algoritmului CSS.
Cu toate c variantele standard ale algoritmilor inspirai din natur au artat rezultate
promitoare [Pre13a], eficien computaional i uurin n implementare, acetia se bazeaz pe valori predefinite ale parametrilor. Prin urmare, se ignor stadiul n care se afl procesul de cutare. Astfel, algoritmii i pierd din eficien prin neglijarea raportului dintre capabilitile de explorare-exploatare i pot rmne blocai n minime locale.
Pentru a evita aceste neajunsuri, este important dezvoltarea unei metode adaptive de folosire a resurselor cu scopul de a mbunti performanele algoritmilor i de evita blocajele n puncte de minim local. O astfel de metod a fost propus i implementat pentru GSA n [Pre12a], [Pre13d] i CSS n [Pre14c].
Versiunile adaptive ale algoritmilor menionai ofer un proces de cutare superior variantelor standard prin mbuntirea capacitii de explorare a spaiului de cutare bazndu-se pe adaptarea etapizat a parametrilor algoritmilor. Aceast dezvoltare etapizat a parametrilor algoritmilor a fost inspirat dintr-un model de nvare descris n [Byb02] i [Bal06] i este descris n fig. 3.5. Modelul de nvare este bazat pe cinci etape (5E): angajare, explorare, explicare, extensie i evaluare.
-
19
Fig. 3.5. Organigramele algoritmilor adaptivi GSA i CSS.
Algoritmii descrii anterior au fost integrai n pasul 4 al metodei de proiectare prezentat
n cadrul capitolului 2, folosind parametri specifici algoritmilor care asigur un compromis ntre viteza de convergen i probabilitatea de a evita blocajul n puncte de minim local. Valorile acestor parametri au fost alese pe baza experienei anterioare a autorului acestei teze.
n vederea exemplificrii rezultatelor obinute, n tabelul 3.2.3 sunt prezentate rezultatele obinute pentru algoritmul PSO i funcia obiectiv
PkJ ,2 .
Tabelul 3.2.3. Rezultate obinute pentru minimizarea funciei obiectiv
PkJ ,2 folosind algoritmul PSO.
2)(Pk
*eB
*eB * *
*ck
*iT min,2 PkJ
0 0.085597 40 0.75 5.08485 0.003443 4.67806 22975.7
0.006858 0.085597 40 0.75 5.08485 0.003443 4.67806 32579.1
0.06858 0.085597 40 0.75 5.08485 0.003443 4.67806 119010
0.6858 0.012792 20 0.25 17 0.001883 15.64 874183
mpreun cu aceste valori, n cadrul tezei este prezentat pentru fiecare algoritm menionat
o analiz a evoluiei parametrilor funciei obiectiv mpreun cu valorile optimale ale acesteia i o descriere a evoluiei vectorului variabilelor problemei (parametrilor de acordare ai regulatorului fuzzy) de-a lungul procesului de cutare. Aceste rezultate sunt validate pe baza experimentelor n timp real.
Pentru a limita zgomotele introduse de parametrii aleatori specifici acestor algoritmi i a prezenta corect rezultatele din punctul de vedere al repetabilitii, n obinerea fiecarui rezultat au fost necesare rulri multiple ale algoritmului propus. Astfel, valorile medii ale celor mai bune rezultate obinute pentru fiecare algoritm au fost cuprinse ntr-un indicator de performan (calitate) notat cu )( min, iJAvg i calculat pe baza relaiei:
=
=bestN
j
ji
besti J
NJAvg
1
)(min,min,
1)(
, (3.41)
n care min, iJ este valoarea funciei obiectiv obinut prin rularea unui algoritm inspirat din natur,
indicele inferior ,4...1 , =ii descrie una din cele patru funcii obiectiv, Pm...1 , = ( 2=Pm ) este
parametrul procesului considerat n aceast tez, },{ TkP , bestN este numrul celor mai bune
valori obinute pentru fiecare funcie obiectiv i parametru de ponderare, indicele superior ,...1 , bestNjj = indic valoarea funciei obiectiv min, iJ obinut la o anumit rulare a algoritmului din
cele bestN rulri. n tabelul 3.8.1.3 sunt prezentate valorile corespunztoare acestui indicator n
cazul funciei obiectiv Pk
J ,2 . Rezultatele prezentate au fost obinute dup 5=bestN rulri.
-
20
Tabelul 3.8.1.3. Valorile indicatorului de performan )( min,2 PkJAvg pentru minimizarea funciei obiectiv PkJ ,2 .
2)( P
k SA PSO GSA PSOGSA CSS GSA adaptiv
CSS adaptiv
0 23017 23012 23511 23965 23129 23129 22976
0.006858 32647 32579 32817 36335 37931 32749 32847
0.06858 118967 119048 119306 119807 119467 119375 119075
0.6858 874484 874183 874149 873857 874183 874162 874183
Un al doilea indicator de performan aplicat acestor algoritmi este viteza de convergen
( sc ). Conform definiiei din [Pre13a], acest indicator este reprezentat de numrul de evaluri ale
funciei obiectiv necesare pn cnd este gsit valoarea minim a acesteia. n tabelul 3.8.2.3 sunt prezentate rezultatele aferente indicatorului sc pentru funcia obiectiv PkJ ,2 .
Tabelul 3.8.2.3. Valori medii ale indicatorui de performan sc pentru minimizarea funciei obiectiv PkJ ,2 .
2)( P
k sc SA sc PSO sc GSA sc
PSOGSA sc CSS s
c GSA
adaptiv sc CSS
adaptiv
0 3035 1906 1399 1660 1358 1718 1905
0.006858 2894 1704 1172 400 609 1839 1135
0.06858 165 1623 915 1613 973 1142 1935
0.6858 2748 105 1846 678 53 891 78
Indicatorul sc ilustreaz ct de repede este atins soluia, ns fr a oferi detalii despre
calitatea soluiei obinute. Aceast limitare este soluionat prin introducerea celui de-al treilea indicator de performan, rata de precizie ( ra ). Acest indicator este definit ca procent al raportului
dintre deviaia standard i valoarea medie a valorilor funciilor obiectiv:
4...1 ,)(
)( 100)(
min,
min,min,
% === iJAvg
JStDevJStDeva
i
iir
, (3.42)
n care valoarea medie )( min, iJAvg a fiecrei funcii obiectiv este calculat folosind relaia (3.41),
iar deviaia standard )( min, iJStDev este calculat conform relaiei:
=
=bestN
j
ij
ibest
i JAvgJN
JStDev
1
2min,
)(min,min, ))((
1
1)(
, (3.43)
iar notaiile sunt similare celor din (3.41). n tabelul 3.8.3.3 sunt prezentate valorile acestui indicator pentru valoarea minimizat a funciei obiectiv
PkJ ,2 .
Tabelul 3.8.3.3. Valori medii ale indicatorului ra pentru minimizarea funciei obiectiv PkJ ,2 .
2)( P
k ra SA ra
PSO ra GSA
ra
PSOGSA ra CSS r
a GSA
adaptiv ra CSS
adaptiv
0 0.1379 0.2702 2.1778 5.6485 0.5706 0.6448 0.0012
0.006858 0.1871 0.0007 0.431 13.1324 12.232 0.1393 0.5406
0.06858 0.0859 0.0386 0.0995 0.604 0.217 0.296 0.0947
0.6858 0.0356 0 0.0022 0.0647 0 0.0027 0 Reducerea sensibilitii parametrice a fost demonstrat cu ajutorul rezultatelor de simulare
numeric a comportrii sistemelor de reglare fuzzy pentru diferite valori ale parametrilor Pk i T
ai procesului comparate cu valorile nominale 14000 == EPP kk i respectiv s 92.00 =T . Nu a fost
posibil efectuarea unor experimente utiliznd standul de laborator deoarece acesta nu permite modificarea parametrilor procesului.
Demonstraia se sprijin pe simulri care implic variaia parametrilor procesului mpreun cu valorile iniiale i cele optimale ale parametrilor regulatoarelor fuzzy-PI de tip T-S. Au fost urmrite i prezentate dou aspecte legate de variaia parametrilor procesului pentru fiecare funcie obiectiv i parametru al procesului: variaia valorilor funciilor obiectiv de-a lungul iteraiilor algoritmilor pentru diverse valori ale parametrilor procesului i evoluia n timp a ieirii sistemului de reglare fuzzy.
i acest capitol se ncheie cu prezentarea contribuiilor autorului.
-
21
4. ACORDAREA OPTIMAL A PARAMETRILOR FUNCIILOR DE APARTENEN DE INTRARE A MODELELOR FUZZY TAKAGI-SUGENO BAZAT PE ALGORITMUL SIMULATED ANNEALING
Dup cum a fost mentionat n capitolul 1, diveri parametri ai modulelor structurii
modelelor fuzzy de tip Takagi-Sugeno (T-S) pot fi acordai optimal. n cadrul acestei teze este efectuat acordarea optimal a unor parametri a funciilor de apartenen de intrare. Aceasta este organizat ca o abordare de modelare care se bazeaz pe parcurgerea pailor urmtori:
Pasul 1. Este definit structura modelului fuzzy dinamic de tip T-S, n spe, numrul punctelor de funcionare (egal cu numrul de reguli), numrul termenilor lingvistici ai variabilelor de intrare, forma termenilor lingvistici ai funciilor de apartenen de intrare, operatorii din mecanismul de inferen i metoda de defuzzificare.
Pasul 2. Este efectuat liniarizarea modelului de stare neliniar cu timp continuu al procesului condus n vecintatea unor puncte de funcionare importante, iar acest numr este egal cu numrul regulilor modelului fuzzy dinamic de tip T-S. Aceasta conduce la un set de modele locale liniare cu timp continuu ale procesului, care sunt plasate n concluziile regulilor modelului fuzzy de tip T-S cu timp continuu i sunt asociate valorilor modale ale funciilor de apartenen de intrare, ce reprezint coordonatele punctelor de funcionare conform principiului echivalenei modale [Gal95]. Este stabilit valoarea perioadei de eantionare i modelele din concluziile regulilor modelelor fuzzy de tip T-S sunt discretizate innd seama de prezena ZOH rezultnd astfel baza de reguli a modelului fuzzy de tip T-S cu timp discret.
Pasul 3. Considernd vectorul parametrilor care conine o parte a parametrilor funciilor de apartenen de intrare aferente modelului fuzzy dinamic de tip T-S, este definit umtoarea problem de optimizare:
)(minarg
*
J
D
= , (4.1)
n care * este vectorul parametrilor optimali ai modelului fuzzy i, n acelai timp, soluia problemei de optimizare, iar D este domeniul admisibil (fezabil) al lui . Funcia obiectiv )(J din (4.1) are expresia:
,))((1))()((1)(1
2,
1
2,
==
==N
k
mk
N
k
mkk eN
yyN
J (4.2)
n care )()( kky = este ieirea procesului la intervalul k de eantionare, )(, mky este ieirea modelului
fuzzy, )()()( ,, mkkmk yye = este eroarea de modelare i N este lungimea orizontului de timp. Problema
de optimizare (4.1), prin funcia obiectiv (4.2) urmrete minimizarea mediei sumei ptratelor erorilor de modelare. Pasul 4. Este aplicat un algoritm inspirat din natur n rezolvarea problemei de optimizare (4.1), pentru obinerea parametrilor optimali ai funciilor de apartenen de intrare, care conduce la modelul fuzzy optimal de tip T-S al procesului. Variabilele de intrare menionate n pasul 1 al abordrii de modelare sunt de fapt variabilele de tip scheduling care sunt implicate n premizele regulilor modelului fuzzy dinamic de tip T-S. Paii 1 i 2 genereaz modelul fuzzy iniial de tip T-S al procesului, iar n pasul 4 se obine modelul fuzzy optimal de tip T-S al procesului. Aceti doi pai ai abordrii de modelare fuzzy pot fi nlocuii cu o metod adecvat de identificare a modelului fuzzy. n lucrrile [Sy08], [Kha10b], [Lu10], [Wat10], [Anh12], [Li12b] i [Moh13] sunt oferite cteva aplicaii reprezentative ale metodelor de indentificare a modelelor fuzzy. Abordarea prezentat este aplicat n cadrul acestui capitol pentru modelarea a dou procese neliniare folosind algoritmul Simulated Annealing (SA) ca algoritm inspirat din natur n pasul 4. Aceste procese sunt un sistem anti-blocaj al roilor i un sistem cu levitaie magnetic, iar modelele fuzzy de tip T-S propuse sunt validate prin experimente n timp real folosind dou standuri experimentale.
Subcapitolul 4.2 este dedicat unui studiu bibliografic privind aplicaiile algoritmilor inspirai din natur n acordarea optimal a parametrilor funciilor de apartenen de intrare aferente modelelor fuzzy.
n continuare, acest rezumat continu cu o prezentare sumar a rezultatelor obinute n acordarea optimal a parametrilor funciilor de apartenen de intrare aferente modelelor fuzzy pentru un sistem de levitaie magnetic. Problema levitaiei magnetice se refer la o sfer metalic meninut ntr-un cmp electromagnetic conform fig. 4.4.1. Folosirea modelelor fuzzy n acest caz este justificat de neliniaritile specifice acestor sisteme.
-
22
Abordarea de modelare fuzzy pentru sistemul considerat pornete de la modelul matematic primar de stare aferent unui sistem cu levitaie magnetic alctuit din doi electromagnei [Int08]:
,
),(1
),(1
,11
,
1
42
2
1
4
31
2
1
3
24
2
123
2
12
21
2
1
2
1
2
1
1
1
xy
xcuk
ef
f
x
xcuk
ef
f
x
xeF
F
mgxe
F
F
mx
xx
ii
f
xx
iP
iP
ii
f
x
iP
iP
F
xx
emP
emPF
x
emP
emP
iP
d
iP
emP
d
emP
=
+
=
+
=
++=
=
&
&
&
&
(4.20)
n care 1uu = este comanda (tensiunea aplicat electromagnetului superior), 2ud = este perturbaia
(tensiunea aplicat electromagnetului inferior), 1,0049.0 21 uu , ix sunt variabilele de stare, 1x este
poziia sferei, mx 016.00 1 , 2x este viteza sferei, 3x i 4x sunt intensitile curenilor din bobina
superioar respectiv inferioar, AxxA 38.2,038.0 43 i y este ieirea. Valorile numerice
corespunztoare acestor parametri sunt preluate din [Int08].
Fig. 4.4.1. Sistemul cu levitaie magnetic cu doi electromagnei INTECO i schema bloc.
Variabilele de intrare (scheduling) luate n considerare pentru modelul fuzzy de tip T-S sunt 1x i 2x , adic primele dou variabile de stare n relaia (4.20). Modelul de ordinul patru din relaia
(4.20) este redus n continuare la un model de stare de ordinul trei, pentru 02 =u :
[ ],001 , 00
,
0
0
010
, ,
33331
2321
3
2
1
=
=
=
=
=
+=
T
T
baa
aa
x
x
x
y
u
cBA
xxC
BxAx&
(4.21)
n care elementele matricelor A i B sunt [Dav12c]:
-
23
.,,0,0
,0,0
),(1
,0,1
,0),(
,2
,2
,0,
,0,0,1,0
2
10
2
10
2
10
2
10
2
10
2
10
2
10
2
10
2
10
2
10
1
241
1
2312111
1
2444342
4021
41
341
33323011
231
2
14024
2
13023
2222
1240
22
1230
21
14131211
emP
d
iP
emP
d
emP
d
iPiP
emP
d
emP
emP
d
emP
F
xx
iP
iPi
f
x
iP
iPi
F
xx
iP
iP
iiF
xx
iP
f
x
iPii
f
x
iP
iP
F
xx
emP
emPF
x
emP
emP
F
xx
emP
emPF
x
emP
emP
ef
fkbe
f
fkbbb
ef
faaa
xcukef
a
aef
aaxcukef
fa
eF
F
m
xae
F
F
m
xa
aeF
F
m
xe
F
F
m
xa
aaaa
====
===
+=
===+=
==
=+=
====
(4.22)
Pentru stabilizarea sferei din sistemul de levitaie magnetic, este proiectat o structur de reglare dup stare prin metoda alocrii polilor pentru stabilizarea modeleului de stare liniar instabil (4.21), care conduce la matricea compensator (stabilizator): ]0075.0536[=Tck . (4.23)
Aceasta conduce la urmtorul model de stare liniarizat de ordinul trei aferent sistemului de reglare dup stare (n bucl nchis):
[ ]TT
xxxx
y
r
321 ,
=
=
+=x
xC
BxAx&. (4.24)
Variabila rx din relaia (4.24) reprezint referina sistemului de reglare dup stare (procesului stabilizat prin reacie dup stare).
Pasul 1 al abordrii de modelare ncepe cu etapa de fuzzificare, prin definirea domeniilor maxime de variaie a celor dou variabile de stare n toate regimurile de funcionare: 765.188.757 ,2.02.0 31 xx . (4.25)
De asemenea, pentru fuzzificare, termenii lingvistici asociai variabilelor de intrare sunt definii astfel: variabila de intrare 1x are trei termeni lingvistici 3...1,,1 =jLT jx , cu funciile de
apartenen de intrare de tip triunghiular. Acetia sunt definii i referii ca 1,1xLT cu universul
discursului [ ]02.0 , 2,1xLT cu universul discursului [ ]1.01.0 , i 3,1xLT cu universul discursului [ ]02.0 . Funciile de apartenen de intrare ale mulimilor fuzzy aferente acestor termeni lingvistici au expresiile:
,3...1 ,
.,0
),,[,1
),,[,1
,,0
)(
,1,1,1
,1
,,1,,
,1
,,1,,
,1
,1
1
1
11
11
1
11
11
1
1
,1
=
-
24
[ )[ )[ )
},3,1{ ,
,,0
,,,1
,,,1
,,,1
,,0
)(
,3,3,3,3
,3
,3,3,3,3
,3
,3,3
,3,3,3,3
,3
,3
,3
-
25
n pasul 2 al abordrii de modelare fuzzy este realizat liniarizarea modelelor neliniare (4.21) n vecintatea acestor puncte de funcionare. Aceasta duce la nou modele de stare cu timp continuu.
Baza de reguli a modelelor dinamice fuzzy de tip T-S cu timp discret este obinut prin applicarea principiului echivalenei modale [Gal95] care garanteaz echivalena dintre modelele fuzzy i mulimea celor modelelor de stare neliniare cu timp discret pentru valorile modale ale intrrilor. Prin urmare, baza de reguli complet a modelului fuzzy de tip T-S cu timp discret cu funciile de apartenen de intrare descrise anterior, este alctuit din regulile 9...1 , =iR i :
, THEN IS AND IS IF:
...
, THEN IS AND IS IF:
9,,
9,9,13,,33,,1
9
1,,
1,1,11,,31,,1
1
31
31
=
+=
=
+=
+
+
kdmk
kdkdkxkxk
kdmk
kdkdkxkxk
y
uLTxLTxR
y
uLTxLTxR
xC
BxAx
xC
BxAx
(4.29)
n care k este indicele intervalului de eantionare curent, i este indicele regulii curente i j este indicele termenului lingvistic curent. De exemplu, matricele modelelor de stare din concluziile regulilor 1R i 9R sunt:
].001[,
1.472
06461.0
00012.0
,
0.09682633.790.37
0.03415-679.00.1642-
0.00011-0044.01.002
],001[,
1.24
03263.0
00006.0
,
0.3488488.699.96
0.02977-8350.01.482-
0.00009-0047.00.9982
9,9,9,
1,1,1,
=
=
=
=
=
=
ddd
ddd
CBA
CBA
(4.30)
n mecanismul de inferen sunt folosii operatorii SUM i PROD. n modulul de defuzzificare este folosit metoda mediei ponderate.
Algoritmul SA este aplicat n pasul 4 al abordrii de modelare fuzzy pentru rezolvarea problemei de optimizare definite n relaia (4.1). n acest context este implementat algoritmul SA prezentat n subcapitolul 3.1 al tezei urmnd paii descrii acolo i folosind urmtoarele relaii dintre funcia obiectiv i funcia de evaluare (fitness) i respectiv dintre vectorul parametrilor din relaia (4.1) i vectorul parametrilor din algoritmul SA: ==== , ),()( ),()( fJfJ . (4.31)
Algoritmul SA pornete cu vectorul parametrilor al modelului fuzzy [Dav12c]: T]26.113785.4251.11.001.0[ = (4.32)
la temperatura iniial 10 = , cu ratele de succes i rejecie maxime stabilite la valorile 1000max =rr i
respectiv 50max =rs i gsete vectorul soluiei finale * dup 176 iteraii la o temperatur de 9
176 109.82741= :
T]3821.149424.51094.10401.00001.00751.0[* = . (4.33)
Au fost efectuate experimente pentru validarea acestui model fuzzy de tip T-S i a abordrii de modelare fuzzy. A fost antrenat modelul fuzzy de tip T-S, dup cum este descris n [Dra11b], [Dra13] folosind un semnal de comand u generat astfel nct s acopere diferite domenii de amplitudine mare i frecven mare (HAHF). Altfel spus, a fost efectuat antrenarea modelelor. Au fost efectuate, apoi, alte experimente, de testare, prin aplicarea altui semnal de comand u , pentru a demonstra mbuntirea semnificativ a performanelor modelului fuzzy de tip T-S prin aplicarea algoritmului SA din punctul de vedere al reducerii erorilor de modelare.
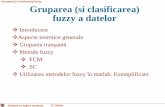
n fig. 4.4.7 este prezentat evoluia funciei obiectiv n funcie de numrul de iteraii. Fig. 4.4.7 arat c soluia problemei de optimizare (4.1) obinute prin algoritmul SA asigur o scdere semnificativ a valorii funciei obiectiv. Dei nu poate fi garantat atingerea minimului funciei obiectiv, fig. 4.4.7 sugereaz posibilitatea de mbuntire prin mrirea ulterioar a numrului de iteraii.
n subcapitolul 4.3 este prezentat acordarea optimal a parametrilor funciilor de apartenen de intrare aferente modelelor fuzzy pentru un sistem anti-blocaj al roilor.
n subcapitolul 4.4 sunt prezentate contribuiile autorului oferite n cadrul capitolul 4.
-
26
Fig. 4.4.7. Evoluia funciei obiectiv n funcie de numrul de iteraii pentru algoritmului SA.
-
27
5. CONTRIBUII, DIRECII VIITOARE DE CERCETARE I DISEMINAREA REZULTATELOR
5.1 Contribuii Noile contribuii propuse n cadrul acestei teze sunt extrase i prezentate n continuare
conform formulrilor din subcapitolele de concluzii aferente capitolelor 2, 3 i 4: Contribuii din capitolul 2:
1. Modele noi cu timp discret ale regulatoarelor fuzzy-PI de tip T-S caracterizate prin manipularea elementelor dinamice n structura acestor regulatoare pentru definirea a dou variabile de stare.
2. Modele noi de sensibilitate cu timp discret ale sistemelor de reglare fuzzy n raport cu doi parametri ai procesului condus reprezentat de o clas de servosisteme neliniare. Sistemele de reglare fuzzy includ regulatoare fuzzy-PI de tip T-S. Clasa de servosisteme neliniare este structurat ca o conexiune serie de elemente liniare de ordinul doi cu dinamic i component integratoare, cu neliniaritate static de tip saturaie i zon moart plasat pe intrarea procesului.
3. O nou metod de proiectare dedicat unor regulatoare simple fuzzy-PI de tip T-S pentru servosisteme cu sensibilitate parametric redus, i anume cu sensibilitate redus n raport cu coeficientul de transfer al procesului i sensibilitate redus n raport cu constanta de timp mic a procesului. Metoda de proiectare asigur acordarea parametrilor regulatoarelor fuzzy prin rezolvarea a patru tipuri de probleme de optimizare pe baza algoritmilor inspirai din natur.
Contribuii din capitolul 3: 1. Aplicarea original a algoritmului SA pentru rezolvarea a patru tipuri de probleme de
optimizare pentru acordarea optimal a parametrilor regulatoarelor fuzzy-PI de tip T-S dedicate reglrii unei clase de servosisteme neliniare.
2. Aplicarea original a algoritmului PSO pentru rezolvarea a patru tipuri de probleme de optimizare pentru acordarea optimal a parametrilor regulatoarelor fuzzy-PI de tip T-S dedicate reglrii unei clase de servosisteme neliniare.
3. Aplicarea original a algoritmului GSA pentru rezolvarea a patru tipuri de probleme de optimizare pentru acordarea optimal a parametrilor regulatoarelor fuzzy-PI de tip T-S dedicate reglrii unei clase de servosisteme neliniare.
4. Aplicarea original a algoritmului hibrid PSO-GSA pentru rezolvarea a patru tipuri de probleme de optimizare pentru acordarea optimal a parametrilor regulatoarelor fuzzy-PI de tip T-S dedicate reglrii unei clase de servosisteme neliniare.
5. Aplicarea original a algoritmului CSS pentru rezolvarea a patru tipuri de probleme de optimizare pentru acordarea optimal a parametrilor regulatoarelor fuzzy-PI de tip T-S dedicate reglrii unei clase de servosisteme neliniare.
6. O nou clas de algoritmi adaptivi GSA cu capabiliti mbuntite de explorare i exploatare inspirai de modelul de nvare 5E folosit n educaie. Algoritmii adaptivi GSA au fost dezvoltai pornind de la varianta standard a GSA, iar cele trei funcionaliti noi sunt:
adaptarea a dou legi de depreciere a constantei gravitaionale la indicele iteraiei; adaptarea unui parametru n suma ponderat a tuturor forelor exercitate de ageni la
indicele iteraiei; reiniializarea la fiecare iteraie a algoritmului GSA adaptiv a poziiei celui mai slab
performant agent la poziia celui mai performant agent. 7. Aplicarea original a algoritmului GSA adaptiv pentru rezolvarea a patru tipuri de
probleme de optimizare pentru acordarea optimal a parametrilor regulatoarelor fuzzy-PI de tip T-S dedicate reglrii unei clase de servosisteme neliniare.
8. O nou clas de algoritmi adaptivi CSS cu capabiliti mbuntite de explorare i exploatare inspirai de modelul de nvare 5E folosit n educaie. Algoritmii adaptivi CSS au fost dezvoltai pornind de la varianta standard a CSS, iar cele dou funcionaliti noi sunt:
adaptarea parametrilor acceleraiei, vitezei i distanei de separare la indicele iteraiei;
substituirea sarcinii cu cea mai slab valoare a funciei obiectiv cu poziia sarcinii cu cea mai performant valoare a funciei obiectiv.
9. Aplicarea original a algoritmului CSS adaptiv pentru rezolvarea a patru tipuri de probleme de optimizare pentru acordarea optimal a parametrilor regulatoarelor fuzzy-PI de tip T-S dedicate reglrii unei clase de servosisteme neliniare.
10. Definirea a trei indicatori de performan (calitate) originali pentru evaluarea calitii soluiilor obinute pe baza algoritmilor inspirai din natur:
valoarea medie a fiecrei funcii obiectiv; viteza de convergen;
-
28
rata de precizie. 11. Evaluarea performanelor (calitii) algoritmilor de optimizare inspirai din natur
bazat pe trei indicatori originali lund n considerare un numr de rulri (cinci n cadrul acestei teze) pentru fiecare algoritm de optimizare inspirat din natur.
12. Validarea noilor rezultate prin simulri folosind modele de sisteme de reglare fuzzy i prin experimente efectuate pe un stand de laborator care conine un servosistem neliniar.
Contribuii din capitolul 4: 1. O nou abordare de modelare fuzzy care asigur acordarea optimal a unei pri din
parametrii funciilor de apartenen de intrare aferente modelelor fuzzy de tip T-S. Aceast abordare se sprijin pe definirea unor problemele de optimizare, care sunt rezolvate ulterior cu ajutorul algoritmilor inspirai din natur.
2. O nou abordare de modelare fuzzy a unui sistem anti-blocaj al roilor folosind parametri variabili ai funciilor de apartenen de intrare optimizai cu ajutorul algoritmului Simulated Annealing.
3. O nou abordare de modelare fuzzy a unui sistem cu levitaie magnetic folosind parametri variabili ai funciilor de apartenen de intrare optimizai cu ajutorul algoritmului Simulated Annealing.
4. Noi modele fuzzy de tip T-S cu timp discret pentru sisteme anti-blocaj al roilor i pentru sisteme cu levitaie magnetic, deduse pe baza principiului echivalenei modale, la care modelele de stare locale liniarizate i apoi discretizate ale procesului condus sunt plasate n concluziile regulilor.
5.2 Direcii viitoare de cercetare Pornind de la noile contribuii prezentate n subcapitolul anterior, cercetrile efectuate n
cadrul acestei teze pot fi extinse n urmtoarele direcii:
Extinderea soluiilor prezentate la alte probleme de optimizare bazate pe sensibilitate redus, formulate n domeniul timp sau n domeniul frecven;
Modelarea fuzzy a proceselor dinamice neliniare prin optimizare parametric bazat pe noi algoritmi inspirai din natur;
Extinderea metodei de acordare a regulatoarelor fuzzy prin includerea condiiilor de stabilitate ca restricii de tip inegalitate;
Introducerea i extinderea aplicrii logicii fuzzy n acordarea parametrilor algorimilor inspirai din natur pentru a limita gradele de libertate reprezentate de parametrii aleatori ai acestor algoritmi;
Dezvoltarea de noi soluii bazate pe hibridizarea algoritimilor pentru evitarea dezavantajelor prezente n variantele standard;
Folosirea abordrii de modelare propuse pentru procese n cadrul diverselor aplicaii industriale;
Extinderea abordrii de modelare la acordarea optimal a parametrilor modelelor fuzzy inclui n alte module ale structurii modelului fuzzy (baza de reguli, mecanismul de inferen i/sau modulul de defuzificare).
5.3 Diseminarea rezultatelor Rezultatele i contribuiile cercetrii prezentate n cadrul tezei au fost diseminate prin
publicarea unui numr de 32 de lucrri, organizate astfel:
8 lucrri publicate n reviste cu factor de impact indexate n Thomson Reuters Web of Science (cu numele anterior ISI Web of Knowledge), cu un factor de impact cumulat de 27.16 conform Journal Citation Reports (JCR) din 2013 publicat de Thompson Reuters n 2014.
7 lucrri publicate n volume de conferine sau n capitole n cri indexate n Thomson Reuters Web of Science (cu numele anterior ISI Web of Knowledge sau ISI Proceedings).
2 lucrri publicate n revist indexat n baza de date internaional SCOPUS. 8 lucrri publicate n volume de conferine indexate n bazele de date
internaionale IEEE Xplore, INSPEC, SCOPUS i/sau DBLP. 4 capitole n cri publicate n Springer-Verlag sau Atlantis Press i indexate n
baza de date Springer Link, dintr-un total de 7 astfel de capitole, 3 fiind indexate
-
29
n Thomson Reuters Web of Science (cu numele anterior ISI Web of Knowledge sau ISI Proceedings).
2 lucrri publicate n reviste internaionale neindexate. 1 lucrare publicat n volum de conferin neindexat.
Autorul acestei teze este prim autor la 9 din aceste lucrri. n continuare este prezentat lista lucrrilor publicate care sprijin rezultatele i
contribuiile din cadrul tezei: 1. R.-E. Precup, R.-C. David, E. M. Petriu, S. Preitl, M.-B. Rdac, Fuzzy control systems
with reduced parametric sensitivity based on simulated annealing, IEEE Transactions on Industrial Electronics, vol. 59, no. 8, pp. 3049-3061, 2012, impact factor (IF) = 5.165, IF according to 2013 Journal Citation Reports (JCR) released by Thomson Reuters in 2014 = 6.500, indexat n Thomson Reuters Web of Science (cotat ISI).
2. R.-E. Precup, R.-C. David, E. M. Petriu, M.-B. Rdac, S. Preitl, J. Fodor, Evolutionary optimization-based tuning of low-cost fuzzy controllers for servo systems, Knowledge-Based Systems (Elsevier Science), vol. 38, pp. 74-84, 2013, impact factor (IF) = 3.058, IF according to 2013 Journal Citation Reports (JCR) released by Thomson Reuters in 2014 = 3.058, indexat n Thomson Reuters Web of Science (cotat ISI).
3. R.-E. Precup, R.-C. David, E.M. Petriu, S. Preitl, M.-B. Rdac, Novel adaptive gravitational search algorithm for fuzzy controlled servo systems, IEEE Transactions on Industrial Informatics, vol. 8, no. 4, pp. 791-800, 2012, impact factor (IF) = 3.381, IF according to 2013 Journal Citation Reports (JCR) released by Thomson Reuters in 2014 = 8.785, indexat n Thomson Reuters Web of Science (cotat ISI).
4. R.-E. Precup, R.-C. David, E. M. Petriu, S. Preitl, A. S. Paul, Gravitational search algorithm-based tuning of fuzzy control systems with a reduced parametric sensitivity, in: Soft Computing in Industrial Applications, editors: A. Gaspar-Cunha, R. Takahashi, G. Schaefer, L. Costa, Advances in Intelligent and Soft Computing, vol. 96, Springer-Verlag, Berlin, Heidelberg, pp. 141-150, 2011, indexat n Thomson Reuters Web of Science (cu numele anterior ISI Web of Knowledge sau ISI Proceedings).
5. R.-C. David, R.-E. Precup, E. M. Petriu, M.-B. Rdac, S. Preitl, Gravitational search algorithm-based design of fuzzy control systems with a reduced parametric sensitivity, Information Sciences (Elsevier Science), vol. 247, pp. 154-173, 2013, impact factor (IF) = 3.893, IF according to 2013 Journal Citation Reports (JCR) released by Thomson Reuters in 2014 = 3.893.
6. R.-E. Precup, R.-C. David, E. M. Petriu, St. Preitl. M.-B. Radac, Novel Adaptive Charged System Search Algorithm for Optimal Tuning of Fuzzy Controllers, Expert Systems with Applications, vol. 41, no. 4, part 1, pp. 1168-1175, 2014, impact factor (IF) = 1.965, IF according to 2013 Journal Citation Reports (JCR) released by Thomson Reuters in 2014 = 1.965, indexat n Thomson Reuters Web of Science (cotat ISI).
7. R.-E. Precup, R.-C. David, E. M. Petriu, S. Preitl, M.-B. Rdac, Fuzzy logic-based adaptive gravitational search algorithm for optimal tuning of fuzzy controlled servo systems, IET Control Theory and Applications, vol. 7, no. 1, pp. 99-107, 2013, impact factor (IF) = 1.844, IF according to 2013 Journal Citation Reports (JCR) released by Thomson Reuters in 2014 = 1.844, indexat n Thomson Reuters Web of Science (cotat ISI).
8. R.-E. Precup, R.-C. David, E. M. Petriu, S. Preitl, M.-B. Rdac, Experiments in fuzzy controller tuning based on an adaptive gravitational search algorithm, Proceedings of the Romanian Academy, Series A: Mathematics, Physics, Technical Sciences, Information Science (Editura Academiei Romne, Bucharest), vol. 14, no. 4, pp. 360-367, 2013, impact factor (IF) = 1.115, IF according to 2013 Journal Citation Reports (JCR) released by Thomson Reuters in 2014 = 1.115, indexat n Thomson Reuters Web of Science (cotat ISI).
9. R.-E. Precup, R.-C. David, E. M. Petriu, M.-B. Rdac, S. Preitl, Adaptive GSA-Based Optimal Tuning of PI Controlled Servo Systems With Reduced Process Parametric Sensitivity, Robust Stability and Controller Robustness, IEEE Transactions on Cybernetics, vol. 44, no. 11, pp. 1997-2009, 2014, impact factor (IF) = 0.000, IF according to 2013 Journal Citation Reports (JCR) released by Thomson Reuters in 2014 = 0.000, indexat n Thomson Reuters Web of Science (cotat ISI).
10. R.-E. Precup, R.-C. David, S. Preitl, E. M. Petriu, J. K. Tar, Optimal control systems with reduced parametric sensitivity based on particle swarm optimization and simulated annealing, in: Intelligent Computational Optimization in Engineering Techniques and
-
30
Applications, M. Kppen, G. Schaefer and A. Abraham, Studies in Computational Intelligence, vol. 366 (Springer-Verlag), pp. 177-207, 2011, indexat n Thomson Reuters Web of Science (cu numele anterior ISI Web of Knowledge sau ISI Proceedings).
11. R.-C. David, M.-B. Rdac, S. Preitl, J. K. Tar, Particle swarm optimization-based design of control systems with reduced sensitivity, Proceedings of 5th International Symposium on Applied Computational Intelligence and Informatics (SACI 2009), Timisoara, Romania, pp. 491-496, 2009, indexat n Thomson Reuters Web of Science (cu numele anterior ISI Web of Knowledge sau ISI Proceedings).
12. C.-A. Drago, R.-E. Precup, R.-C. David, S. Preitl, A.-I. Stnean, E. M. Petriu, Simulated annealing-based optimization of fuzzy models for magnetic levitation systems, Proceedings of 2013 Joint IFSA World Congress and NAFIPS Annual Meeting IFSA/NAFIPS 2013, Edmonton, AB, Canada, pp. 286-291, 2013, indexat n Thomson Reuters Web of Science (cu numele anterior ISI Web of Knowledge sau ISI Proceedings).
13. R.-E. Precup, S. V. Sptaru, M.-B. Rdac, E. M. Petriu, S. Preitl, C.-A. Drago, R.-C. David, Experimental results of model-based fuzzy control solutions for a laboratory antilock braking system, in: Human-Computer Systems Interaction: Backgrounds and Applications 2, Part 2, Z. S. Hippe, J. L. Kulikowski and T. Mroczek, Eds., Advances in Intelligent and Soft Computing, vol. 99, Springer-Verlag, Berlin, Heidelberg, pp. 223-234, 2012, indexat n Thomson Reuters Web of Science (cu numele anterior ISI Web of Knowledge sau ISI Proceedings).
14. R.-E. Precup, R.-C. David, A.-I. Stnean, M.-B. Rdac, E. M. Petriu, Adaptive Hybrid Particle Swarm Optimization-Gravitational Search Algorithm for Fuzzy Controller Tuning, Proceedings of 2014 IEEE International Symposium on Innovations in Intelligent Systems and Applications INISTA 2014, Alberobello, Italy, pp. 14-20, 2014, indexat n Thomson Reuters Web of Science (cu numele anterior ISI Web of Knowledge sau ISI Proceedings).
15. R.-E. Precup, R.-C. David, E. M. Petriu, S. Preitl, M.-B. Rdac, Gravitational search algorithms in fuzzy control systems tuning, Proceedings of 18th IFAC World Congress, Milano, Italy, pp. 13624-13629, 2011, indexat n SCOPUS.
16. R.-C. David, R.-E. Precup, E. M. Petriu, C. Purcaru, S. Preitl, PSO and GSA algorithms for fuzzy controller tuning with reduced process small time constant sensitivity, Proceedings of 2012 16th International Conference on System Theory, Control and Computing (ICSTCC 2012), Sinaia, Romania, 6 pp., 2012, indexat n IEEE Xplore, INSPEC, SCOPUS.
17. R.-C. David, R.-E. Precup, E. M. Petriu, M.-B. Rdac, C. Purcaru, C.-A. Drago, S. Preitl, Adaptive gravitational search algorithm for PI-fuzzy controller tuning, Proceedings of 9th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2012), Rome, Italy, vol. 1, pp. 136-141, 2012, indexat n SCOPUS, DBLP.
18. R.-C. David, R.-E. Precup, S. Preitl, J. K. Tar, J. Fodor, Parametric sensitivity reduction of PI-based control systems by means of evolutionary optimization algorithms, Proceedings of 6th IEEE International Symposium on Applied Computational Intelligence and Informatics (SACI 2011), Timisoara, Romania, pp. 241-246, 2011, indexat n IEEE Xplore, INSPEC, SCOPUS.
19. R.-C. David, R.-E. Precup, S. Preitl, J. K. Tar, J. Fodor, Three evolutionary optimization algorithms in PI controller tuning, in: Applied Computational Intelligence in Engineering and Information Technology, editors: R.-E. Precup, S. Kovacs, S. Preitl, E. M. Petriu, Topics in Intelligent Engineering and Informatics, vol. 1, Spriger-Verlag, Berlin, Heidelberg, pp. 95-106, 2012, indexat n Springer Link.
20. R.-E. Precup, R.-C. David, E. M. Petriu, S. Preitl, M.-B. Rdac, Charged System Search Algorithms for Optimal Tuning of PI Controllers, Proceedings of 1st IFAC Conference on Embedded Systems, Computational Intelligence and Telematics in Control (CESCIT 2012), pp. 115-120, 2012, indexat n SCOPUS.
21. R.-C. David, R.-E. Precup, E. M. Petriu, St. Preitl, M.-B. Radac, L.-O. Fedorovici, Adaptive Evolutionary Optimization Algorithms for Simple Fuzzy Controller Tuning Dedicated to Servo Systems, in: Fuzzy Modeling and Control: Theory and Applications, F. Matia, G. N. Marichal and E. Jimenez, Eds., Atlantis Computational Intelligence Systems, vol. 9, Atlantis Press and Springer International Publishing, Cham, Heidelberg, New York, Dordrecht, London, pp. 159-173, 2014, indexat n Springer Link.
22. R.-E. Precup, R.-C. David, S. Preitl, E. M. Petriu, Design aspects of optimal PI controllers with reduced sensitivity for a class of servo systems using PSO algorithms,
-
31
Facta Universitatis Series: Automatic Control and Robotics, vol. 8, no. 1, pp. 1-12, 2009.
23. R.-E. Precup, R.-C. David, E. M. Petriu, S. Preitl, Optimal fuzzy controllers tuned by charged system search algorithms, 2011 Online Conference on Soft Computing in Industrial Applications (WSC 16), 10 pp., 2011.
24. R.-C. David, R.-B. Grad, R.-E. Precup, M.-B. Rdac, C.-A. Drago, E. M. Petriu, An approach to fuzzy modeling of anti-lock braking systems, in: Soft Computing in Industrial Applications, V. Snasel, P. Kromer, M. Koppen and G. Schaefer, Eds., Advances in Intelligent Systems and Computing, Springer International Publishing, Berlin, Heidelberg, vol. 223, pp. 83-93, 2014, indexat n Springer Link.
25. R.-C. David, C.-A. Drago, R.-G. Bulzan, R.-E. Precup, E. M. Petriu, M.-B. Rdac, An approach to fuzzy modeling of magnetic levitation systems, International Journal of Artificial Intelligence, vol. 9, no. A12, pp. 1-18, 2012, indexat n SCOPUS.
26. A.-S. Paul, R.-E. Precup, C. Pozna, R.-C. David, nDSP: A platform for audiophile software audio processing, Proceedings of IEEE International Joint Conferences on Computational Cybernetics and Technical Informatics (ICCC-CONTI 2010), Timisoara, Romania, pp. 431-436, 2010, indexat n IEEE Xplore, INSPEC, SCOPUS.
27. C.-A. Drago, R.-E. Precup, E. M. Petriu, M. L. Tomescu, S. Preitl, R.-C. David, M.-B. Rdac, 2-DOF PI-fuzzy controllers for a magnetic levitation system, Proceedings of 8th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2011), Noordwijkerhout, The Netherlands, vol. 1, pp. 111-116, 2011, indexat n SCOPUS, DBLP.
28. R.-E. Precup, E. M. Petriu, C.-A. Drago, R.-C. David, Stability analysis results concerning the fuzzy control of a class of nonlinear time-varying systems, Theory and Applications of Mathematics & Computer Science, vol. 1, no. 1, pp. 2-10, 2011.
29. L.-O. Fedorovici, R.-E. Precup, F. Drgan, R.-C. David, C. Purcaru, Embedding gravitational search algorithms in convolutional neural networks for OCR applications, Proceedings of IEEE 7th International Symposium on Applied Computational Intelligence and Informatics (SACI 2012), Timisoara, Romania, pp. 125-130, 2012, indexat n IEEE Xplore, INSPEC, SCOPUS, DBLP.
30. C. Purcaru, R.-E. Precup, D. Iercan, L.-O. Fedorovici, R.-C. David, Hybrid PSO-GSA Robot Path Planning Algorithm in Static Environments with Danger Zones, Proceedings of 2013 17th International Conference on System Theory, Control and Computing (ICSTCC 2013), Sinaia, Romania, 2013, pp. 434-439, indexat n Thomson Reuters Web of Science (cu numele anterior ISI Web of Knowledge sau ISI Proceedings).
31. C. Purcaru, R.-E. Precup, D. Iercan, L.-O. Fedorovici, R.-C. David, F. Drgan, Optimal robot path planning using gravitational search algorithm, International Journal of Artificial Intelligence, vol. 9, no. 13 S, pp. 1-20, 2013, indexat n SCOPUS.
32. L.-O. Fedorovici, R.-E. Precup, R.-C. David, F. Drgan, GSA-Based Training of Convolutional Neural Networks for OCR Applications, in: Computational Intelligence Systems in Industrial Engineering, C. Kahraman, Ed., Atlantis Computational Intelligence Systems, vol. 6, Atlantis Press and Springer-Verlag, Cham, Heidelberg, New York, Dordrecht, London, pp. 481-504, 2012, indexat n Springer Link.
Autorul acestei teze este prim autor al 9 dintre cele 32 de lucrri publicate. Lucrarea menionat n cadrul poziiei 23 din list a fost distins cu premiul Best paper
award la 16th Online World Conference on Soft Computing in Industrial Applications WSC16 (Loughborough University, UK, 2011).
Lucrrile publicate n lista mai sus menionat au primit un numr total de 124 citri
independente (sunt excluse autocitrile tuturor coautorilor). Factorul de impact cumulat ale acestor citri independente este de 116.069 conform
Journal Citation Reports (JCR) din 2013 publicat de Thompson Reuters n 2014. 54 din aceste citri sunt indexate n Thomson Reuters Web of Science (cu numele anterior ISI Web of Knowledge sau ISI Proceedings, 42 dintre aceste lucrri fiind publicate n reviste i 12 n volume de conferine) i 28 de citri sunt indexate n bazele de date internaionale IEEE Xplore, INSPEC, SCOPUS i/sau DBLP.
-
32
6. BIBLIOGRAFIE SELECTIV
[Alm10] M. Almaraashi, R. John, S. Coupland, A. Hopgood, Time series forecasting using a TSK fuzzy system tuned with simulated annealing, Proceedings of 2010 IEEE International Conference on Fuzzy Systems (FUZZ-IEEE 2010), Barcelona, Spain, pp. 16, 2010.
[Anh12] H. P. H. Anh, C. T. Lam, P. H. Lam, Inverse adaptive fuzzy model identification of the 2-axes PAM robot arm, Proceedings of 2012 International Conference on Control, Automation and Information Sciences (ICCAIS 2012), Saigon, Vietnam, pp. 334339, 2012.
[Ara03] M. Araki, H. Taguchi, Two-degree-of-freedom PID controllers, International Journal of Control, Automation, and Systems, vol. 1, no. 4, pp. 401411, Dec. 2003.
[Ast95] K. J. strm, T. Hgglund, PID Controllers Theory: Design and Tuning, Research Triangle Park, NC: Instrument Society of America, 1995.
[Bal06] S. Balci, J. Cakiro