
ÎNDRUMAR PENTRU LUCRĂRI DE LABORATOR O.M. L11-20
91
Organe de maşini – Îndrumar pentru lucrări de laborator LUCRAREA DE LABORATOR NR. 11 TRASAREA CARACTERISTICII ARCULUI ELICOIDAL CILINDRIC 1. Scopul lucrării Scopul lucrării este acela de a prezenta elementele geometrice ale arcului elicoidal cilindric simplu (executat din bară cu secţiunea rotundă); de asemenea, se va trasa caracteristica arcului. 2. Noţiuni teoretice Arcurile sunt organe de maşini care pe baza elasticităţii obţinută prin forma constructivă şi a materialului din care sunt executate, sub acţiunea forţelor exterioare, înregistrează deformaţii relativ mari, revenind la forma iniţială după încetarea acestor forţe; în acest fel, energia acumulată în timpul deformării poate fi transformată integral sau parţial în lucru mecanic. În industrie arcurile au o largă răspândire, fiind folosite pentru [27]: - exercitarea unei forţe elastice permanente (cuplajele de siguranţă prin fricţiune, ambreiaje prin fricţiune, arcurile întinzătoare etc.); - acumulatoarele de energie (arcurile de ceasornic, arcurile motoare ale unor mecanisme- jucării, arcurile supapelor etc.); 83
-
Upload
decebal-botez -
Category
Documents
-
view
100 -
download
6
description
ÎNDRUMAR PENTRU LUCRĂRI DE LABORATOR O.M.
Transcript of ÎNDRUMAR PENTRU LUCRĂRI DE LABORATOR O.M. L11-20
Organe de maşini – Îndrumar pentru lucrări de laborator
LUCRAREA DE LABORATOR NR. 11
TRASAREA CARACTERISTICII ARCULUI ELICOIDAL CILINDRIC
1. Scopul lucrării
Scopul lucrării este acela de a prezenta elementele geometrice ale arcului elicoidal cilindric simplu (executat din bară cu secţiunea rotundă); de asemenea, se va trasa caracteristica arcului.
2. Noţiuni teoretice
Arcurile sunt organe de maşini care pe baza elasticităţii obţinută prin forma constructivă şi a materialului din care sunt executate, sub acţiunea forţelor exterioare, înregistrează deformaţii relativ mari, revenind la forma iniţială după încetarea acestor forţe; în acest fel, energia acumulată în timpul deformării poate fi transformată integral sau parţial în lucru mecanic. În industrie arcurile au o largă răspândire, fiind folosite pentru [27]:
- exercitarea unei forţe elastice permanente (cuplajele de siguranţă prin fricţiune, ambreiaje prin fricţiune, arcurile întinzătoare etc.);
- acumulatoarele de energie (arcurile de ceasornic, arcurile motoare ale unor mecanisme- jucării, arcurile supapelor etc.);
- amortizarea şocurilor şi vibraţiilor (suspensia autovehiculelor, reazemele elastice ale motoarelor, tampoane, limitatoare de cursă, fundaţii de maşini-unelte, cârlige de macara etc.);
- limitarea valorilor maxime ale sarcinilor (arcurile utilizate în construcţia cuplajelor de siguranţă, la prese etc.);
- măsurarea forţelor şi momentelor (chei dinamometrice, dinamometre, cântare, aparate de măsură, standuri de încercări etc.);
- modificarea frecvenţei proprii a unor organe de maşini sau a unor sisteme mecanice, în scopul îmbunătăţirii funcţionării şi al evitării fenomenului de rezonanţă;
- reglarea funcţionării unor dispozitive în funcţie de variaţia caracteristicilor agentului motor (robinete, supape de reglare etc.).
Pentru definirea unui arc trebuie să se stabilească tipul de arc, forma constructivă şi materialul. Pentru proiectarea asamblărilor elastice trebuie să se ţină seama de factorii care condiţionează funcţionarea arcurilor: comportarea elastică,
83
spaţiul disponibil, modul de acţiune al forţei exterioare (natura acesteia), condiţiile de lucru (temperatură, umiditate, praf, mediu coroziv), siguranţă în funcţionare. Pentru calculul şi utilizarea elementelor elastice, de o deosebită importanţă sunt parametrii de bază care vor fi prezentaţi în continuare:
- încărcarea arcului, care poate fi o forţă sau un moment;- săgeata care reprezintă cursa sau deformaţia arcului; aceasta poate fi liniară
sau unghiulară. Cu aceşti parametrii se poate trasa caracteristica arcului care poate reprezenta dependenţa dintre forţă şi săgeată (fig. 1, a) sau dintre moment şi deformaţia unghiulară (fig. 2, b).
Fig. 1
Rigiditatea arcului reprezintă raportul dintre forţă şi deplasare (săgeată), respectiv dintre moment şi deformaţia unghiulară:
; (1)
( )
Caracteristica liniară (fig. 1) este întâlnită la arcuri fără frecare (sau cu frecări neglijabile), executate din materiale care respectă legea lui Hooke; aceste arcuri au rigiditatea constantă.
Lucrul mecanic este un parametru important al arcurilor şi se obţine prin:
Caracteristica arcurilor cu rigiditate variabilă este o curbă (fig. 2). În acest caz, rigiditatea este exprimată prin relaţiile:
(3)
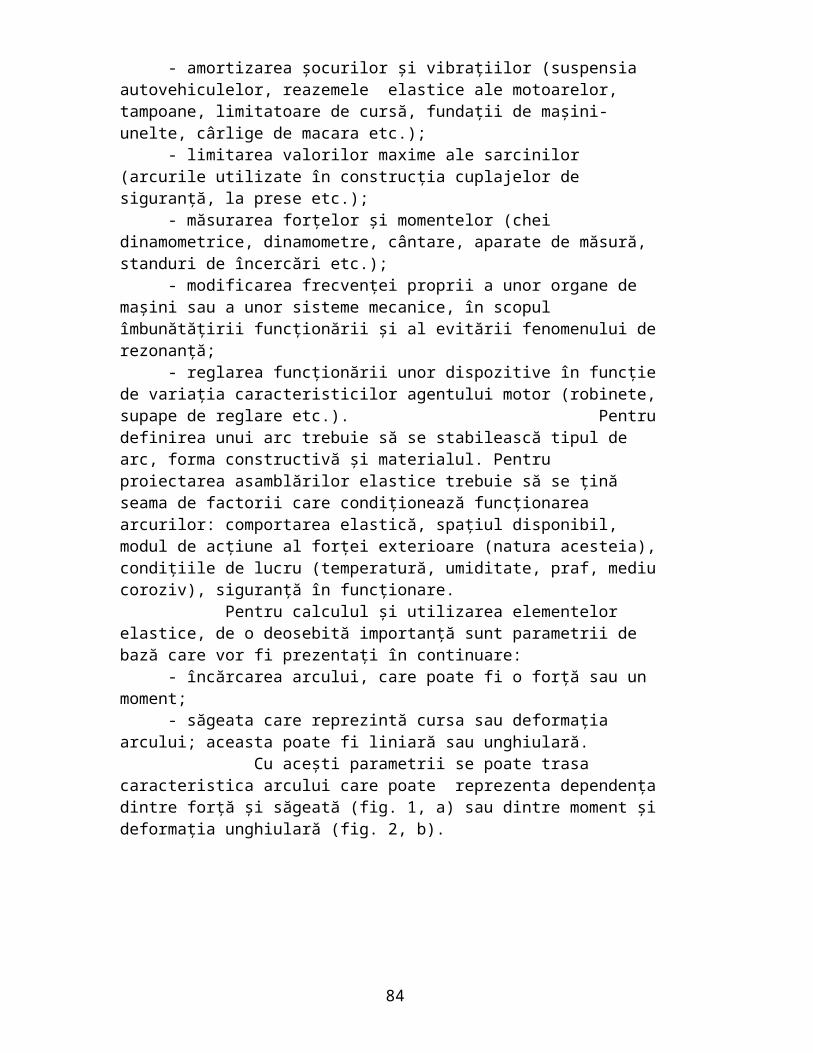
La arcurile cu rigiditate progresivă (arcurile tari), panta curbei, care reprezintă caracteristica, este crescătoare, iar la arcurile cu rigiditate regresivă (arcurile moi), această pantă este descrescătoare (fig. 2). Lucrul mecanic înmagazinat la deformarea unor asemenea arcuri se exprimă prin relaţiile:
84

(4)
Fig. 2
Conform STAS 7067/1-87 elementele geometrice caracteristice ale arcurilor elicoidale cilindrice de compresiune, sunt (fig. 3):
unghiul de înclinare al spirei ( );
- indicele arcului(i pentru arcurile înfăşurate la rece şi i
pentru arcurile înfăşurate la cald);
- lungimea arcului în stare liberă;
- diametrul secţiunii spirei;
- pasul;
- diametrul exterior;
- diametrul mediu de înfăşurare;
- diametrul interior.
85
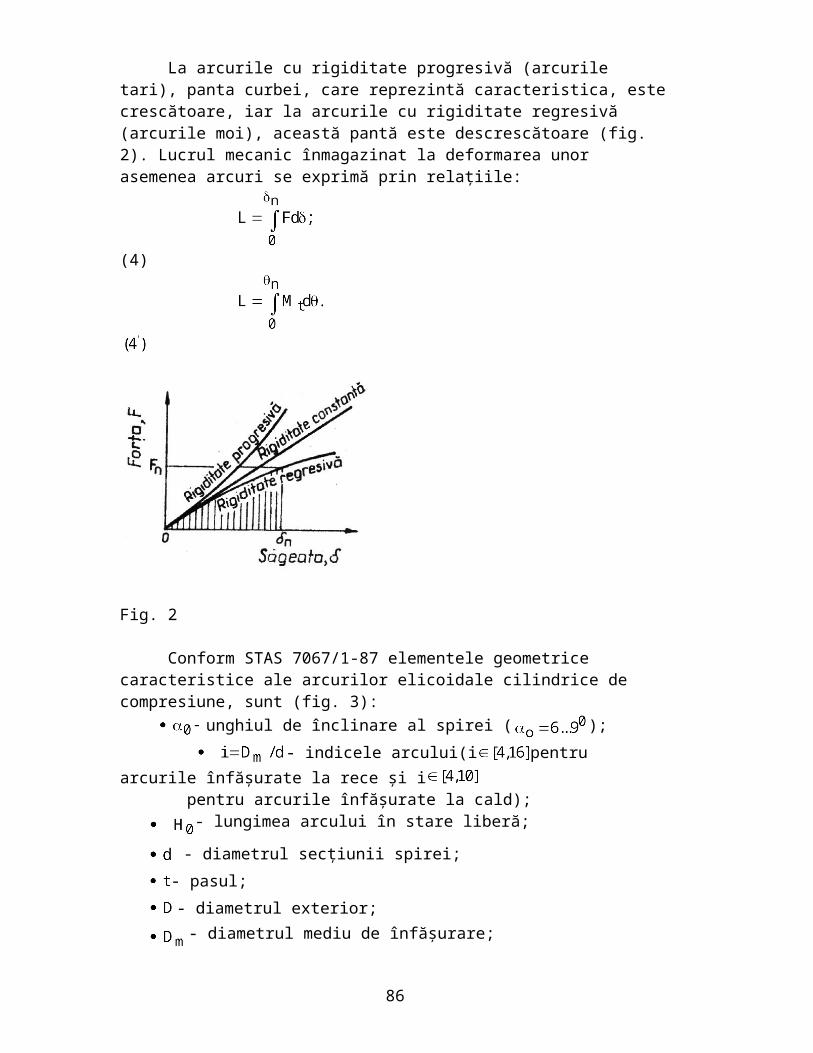
Fig. 3 Pentru a avea o dispunere centrică a sarcinii şi o încărcare uniformă a spirelor, suprafaţa de aşezare a arcului se prelucrează. În urma prelucrării se asigură şi perpendicularitatea suprafeţei de aşezare faţă de axa de simetrie a arcului (spirele prelucrate, numite spire de reazem nu se deformează elastic şi nu se iau în considerare în calculul deformaţiilor arcului). În funcţie de numărul spirelor active n, se stabileşte numărul spirelor de reazem , după cum urmează: pentru şi
pentru . Numărul total de spire este
(5)
Caracteristica elastic a unui arc elicoidal cilindric de compresiune este prezentată în figura 4, utilizându-se pe lângă notaţiile din figura 3 şi următoarele
notaţii: - sarcina axială de precomprimare (sarcina iniţială sau sarcina de montaj);
- săgeata, respectiv lungimea arcului corespunzătoare sarcinii maxime de funcţionare
- săgeata, respectiv lungimea arcului blocat (arcul
comprimat spiră pe spiră), corespunzătoare sarcinii de blocare , sarcina limită a
arcului; h- cursa de lucru a arcului.
86
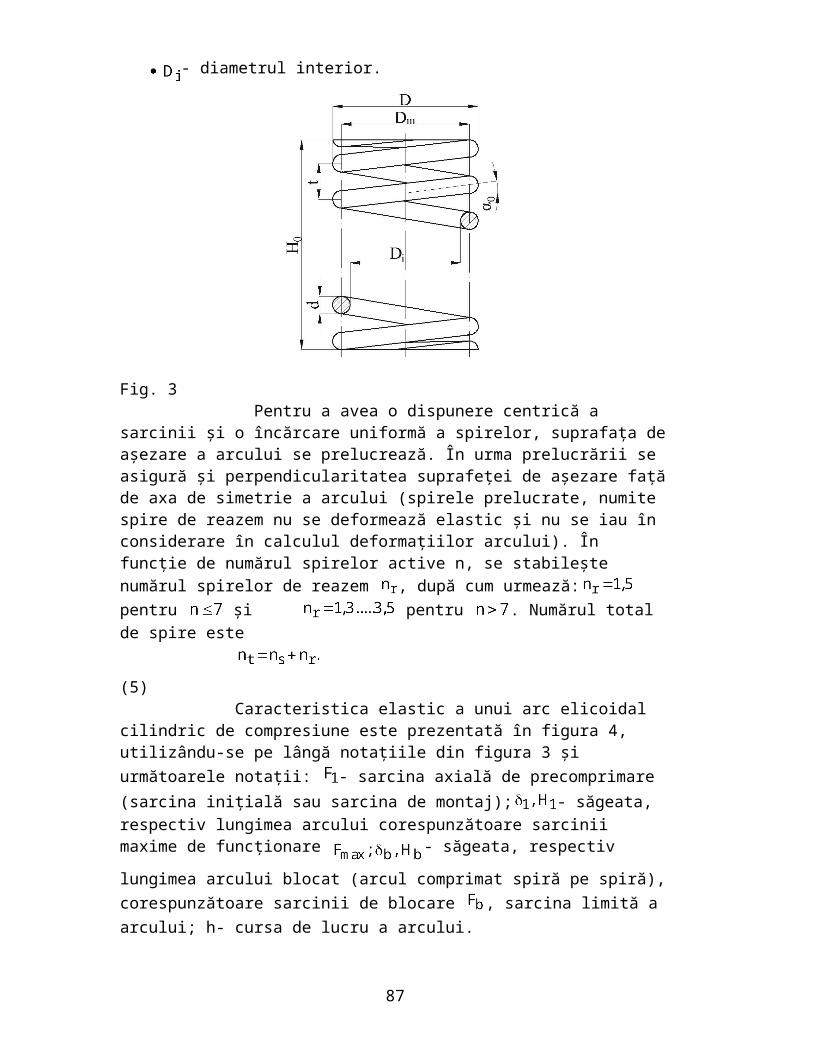
Fig. 4
3. Prezentarea dispozitivului Dispozitivul (fig. 5) este compus din următoarele elemente: piesa tubulară (poz.1- ţeava) în care se introduc diverse arcuri (poz. 5), care sunt (arcurile) solicitate (comprimate) cu ajutorul pieselor cilindrice de la poziţia 4; 2 – şuruburi de fixare; 3- suport. Arcurile elicoidale cilindrice de compresiune (poz. 5) de diverse mărimi se introduc (pe rând) în elementul tubular 1; arcurile vor fi comprimate cu ajutorul pieselor cilindrice (poz. 4); deplasarea capetelor arcurilor (săgeata) se citeşte pe scara gradată a elementului 1.
87
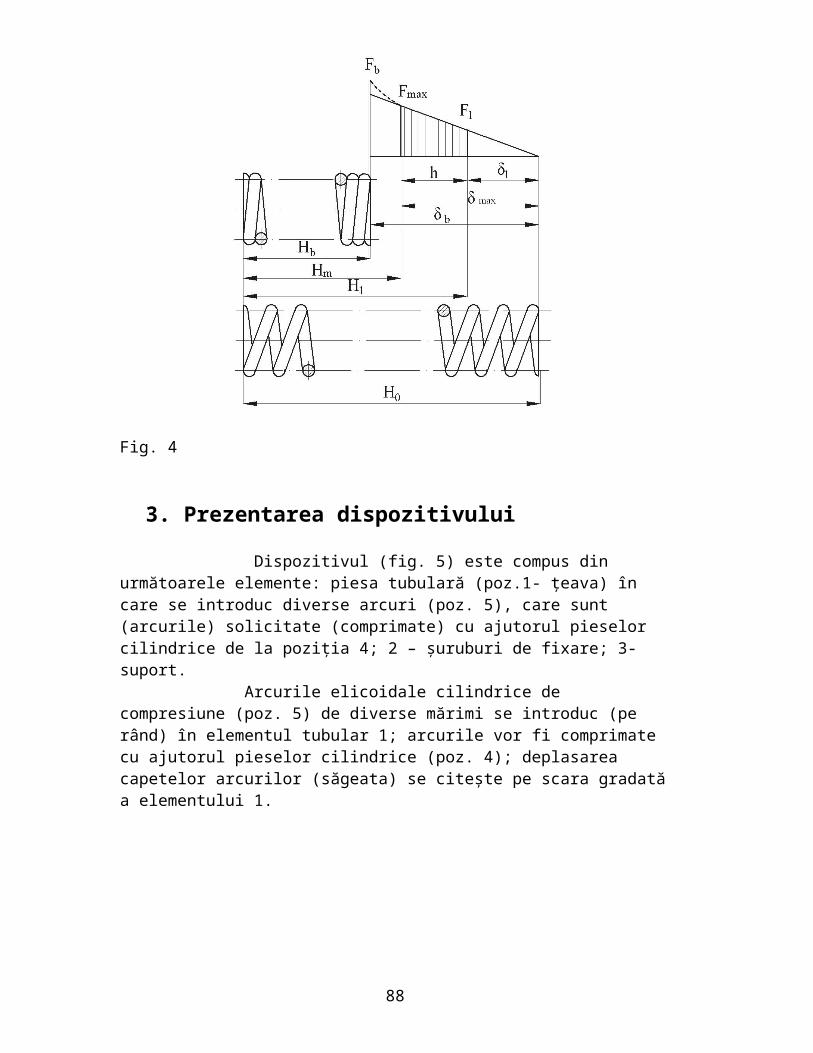
Fig. 5
4. Modul de desfăşurare al lucrării
Se vor determina elementele geometrice ale arcului elicoidal montat în dispozitiv. Se vor determina săgeţile corespunzătoare celor patru forţe de încărcare. Forţele de încărcare se obţin prin amplasarea la partea superioară a arcului a celor patru greutăţi cilindrice care au următoarele mase:
Rezultatele determinărilor vor fi trecute în tabelul de mai jos. Se va trasa caracteristica arcului. Se va calcula lucrul mecanic de deformaţie al arcului.
Nr. det.
Masa, kg
Forţa, N(kg.g)
Săgeata, mm
Observaţii
88

Tabelul 1
5. Modul de elaborare al referatului lucrării de laborator Referatul lucrării de laborator trebuie să cuprindă:- titlul lucrării;- scopul lucrării;- relaţiile de determinare a rigidităţii arcului şi a lucrului mecanic;- schema dispozitivului (fig. 5), cu indicarea elementelor componente;- tabelul 1, în care se vor completa datele obţinute în urma efectuării testelor;- caracteristicile arcurilor testate;- calculul lucrului mecanic de deformaţie (pentru fiecare arc testat).
Organe de maşini – Îndrumar pentru lucrări de laborator
LUCRAREA DE LABORATOR NR. 12
89

TRASAREA CARACTERISTICII ARCULUI LAMELAR DREPTUNGHIULAR
1. Scopul lucrării
Scopul lucrării este acela de a cunoaşte construcţia arcului lamelar şi de a determina parametrii caracteristici; de asemenea se va trasa diagrama forţă-săgeată.
2. Noţiuni teoretice
Arcurile lamelare (monolamelare) sunt alcătuite dintr-o singură lamelă (foaie), încastrată, de regulă la un capăt şi liberă la celălalt capăt, unde este aplicată forţa exterioară. Aceste arcuri sunt folosite ca elemente de apăsare în construcţia aparatelor şi instrumentelor de măsură, mecanismelor de blocare, mecanismelor cu clichet, întrerupătoarelor, sitelor vibratoare, jgheaburilor oscilante etc.
Constructiv există mai multe tipuri de arcuri lamelare dintre care mai des utilizate sunt [27]: - arcul lamelar cu secţiune constantă (fig. 1) este o soluţie simpla şi ieftină, dar utilizează neraţional materialul; - arcul lamelar cu grosime constantă şi lăţime variabilă (fig. 2), care utilizează mai bine materialul, dar are un preţ mai ridicat.
Cea mai buna utilizare a materialului se obţine în cazul arcului lamelar cu lăţime constantă şi grosime variabilă după o lege parabolică, dar această soluţie nu este acceptată din punct de vedere tehnologic.
Arcurile lamelare se fixează de obicei rigid la o extremitate, ceea ce echivalează cu o încastrare, fiind încărcate la capătul liber cu sarcina F; solicitarea principală este încovoierea. De regulă, aceste arcuri se execută din oţel lat pentru arcuri, laminat la cald.
Arcul lamelar dreptunghiular. Momentul încovoietor este maxim în secţiunea de încastrare de lăţime b şi înălţime h, având valoarea:
(1)
90

Fig. 1
Fig. 2
Această relaţie permite verificarea lamelei
(2)
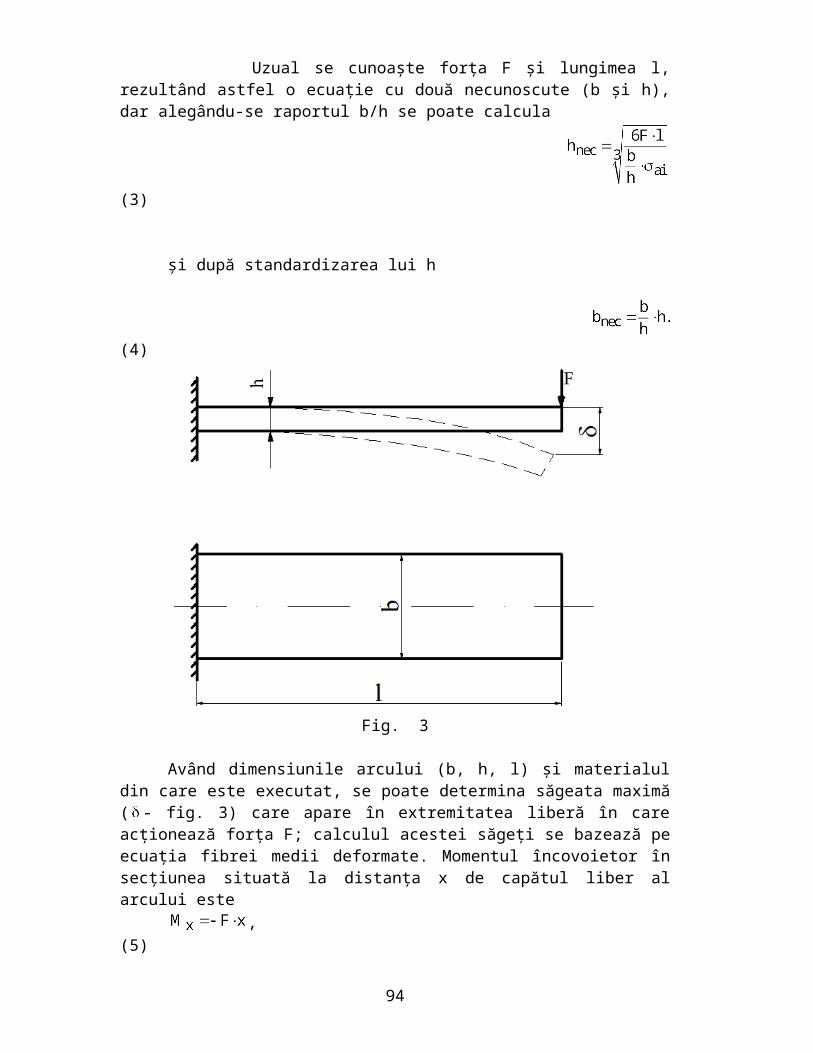
precum şi dimensionarea acesteia. Uzual se cunoaşte forţa F şi lungimea l, rezultând astfel o ecuaţie cu două necunoscute (b şi h), dar alegându-se raportul b/h se poate calcula
91

(3)
şi după standardizarea lui h
(4)
Fig. 3
Având dimensiunile arcului (b, h, l) şi materialul din care este executat, se poate determina săgeata maximă ( - fig. 3) care apare în extremitatea liberă în care acţionează forţa F; calculul acestei săgeţi se bazează pe ecuaţia fibrei medii deformate. Momentul încovoietor în secţiunea situată la distanţa x de capătul liber al arcului este
, (5) iar ecuaţia diferenţială a fibrei medii deformate se scrie sub forma
(6)
Prin integrare se obţine:
; (7)
; (8)
92

(9)
Punând condiţiile la limită:
(10)
se obţine
; (11)
(12)
de unde
; (13)
se obţine pentru
. (14)
Având în vedere că secţiunea arcului este constantă de-a lungul lungimii sale, înlocuind relaţia (9) în relaţia (14), se obţine
(15)
Rigiditatea se obţine cu relaţia (pentru arcul lamelar dreptunghiular cu secţiunea constantă)
(16)
Lucrul mecanic înmagazinat în timpul variaţiei săgeţii de la 0 la , pentru caracteristica liniară, este
(17)
Ţinând seama de expresia
(18)
se obţine
(19)
de unde
(20)
în care b reprezintă volumul arcului
93
(21)
Arcul lamelar triunghiular. În acest caz:
(22)
(23)
de unde, prin folosirea relaţiei (23) în relaţia (22), rezultă (fig. 4)
(24)
Fig. 4
Săgeata în dreptul forţei F este
(25)
unde se consideră în secţiunea corespunzătoare centrului de greutate al triunghiului, adică Rezultă:
; (26)
94
, (27)
de unde
; (28)
; (29)
lucrul mecanic de deformaţie este
(30)
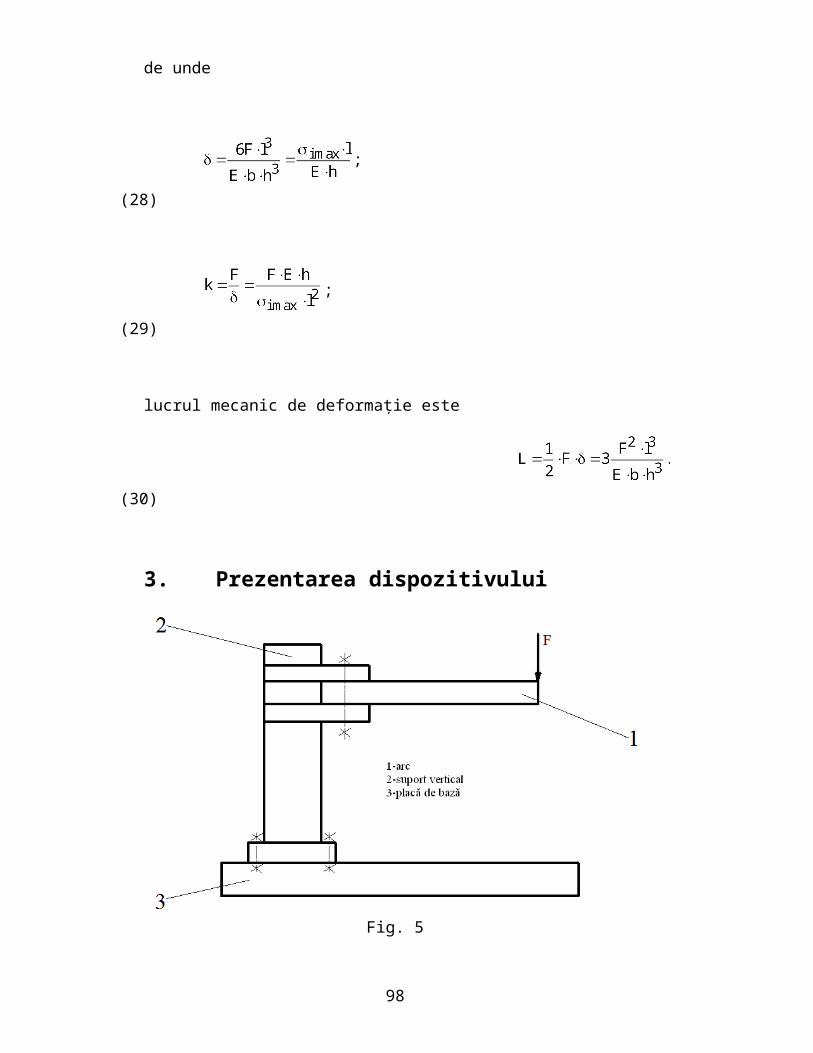
3. Prezentarea dispozitivului
Fig. 5
95

Dispozitivul (fig. 5) este compus din următoarele elemente: arcul lamelar (poz. 1) care poate fi cu secţiune constantă sau cu lăţime variabilă; suportul (poz. 2) în care se montează arcurile lamelare supuse testelor; placa de bază (poz. 3).
Arcurile lamelare de dimensiuni şi forme constructive diferite se montează pe rând în suportul 2 (poz. 2) şi sunt supuse testelor.
4. Modul de desfăşurare al lucrării
Se vor determina elementele geometrice ale fiecărui arc lamelar montat în dispozitiv (fig. 5).
Se vor folosi cinci mase etalonate care vor solicita (pe rând) diversele arcuri montate în dispozitiv; masele se vor prinde pe extremitatea liberă a fiecărui arc.
Săgeţile produse de cele cinci forţe (cinci mase etalonate) se vor determina cu ajutorul unei rigle gradate.
Rezultatele determinărilor vor fi trecute în tabelul de mai jos (se va completa câte un tabel pentru fiecare arc lamelar testat).
Tabelul 1 Nr. det.
Masa,kg
Forţa,N(kg g)
Săgeata,mm
Observaţii
Se vor trasa caracteristicile diverselor arcuri testate.Se va calcula lucrul mecanic de deformaţie pentru fiecare arc testat.
5. Modul de elaborare al referatului lucrării de laborator
Referatul lucrării de laborator trebuie să cuprindă:- titlul lucrării;- scopul lucrării;- relaţiile de determinare a rigidităţii arcului şi a lucrului mecanic;- schema dispozitivului, cu indicarea elementelor componente;- tabelul 1, în care se vor complete datele obţinute în urma efectuării testelor;
96

- caracteristicile arcurilor testate;- calculul lucrului mecanic de deformaţie (pentru fiecare arc testat).
97
Organe de maşini – Îndrumar pentru lucrări de laborator
LUCRAREA DE LABORATOR NR. 13
TRASAREA CARACTERISTICII ARCULUI DISC
1. Scopul lucrării
Scopul lucrării este acela de a cunoaşte modul de determinare experimentală a caracteristicii elastice a arcurilor disc; de asemenea se va trasa caracteristica elastică experimentală a unui arc disc.
2. Noţiuni teoretice
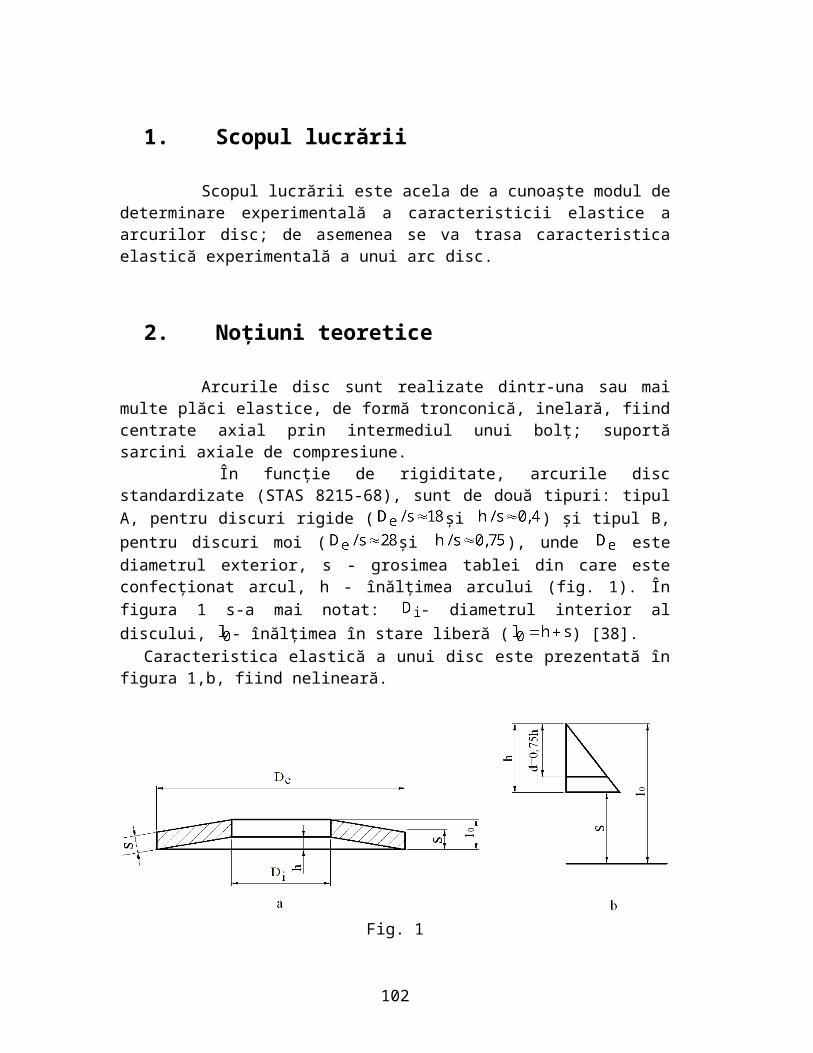
Arcurile disc sunt realizate dintr-una sau mai multe plăci elastice, de formă tronconică, inelară, fiind centrate axial prin intermediul unui bolţ; suportă sarcini axiale de compresiune.
În funcţie de rigiditate, arcurile disc standardizate (STAS 8215-68), sunt de două tipuri: tipul A, pentru discuri rigide ( şi ) şi tipul B, pentru
discuri moi ( şi ), unde este diametrul exterior, s - grosimea tablei din care este confecţionat arcul, h - înălţimea arcului (fig. 1). În figura 1 s-a mai notat: - diametrul interior al discului, - înălţimea în stare liberă ( ) [38].
Caracteristica elastică a unui disc este prezentată în figura 1,b, fiind nelineară.
Fig. 1
98
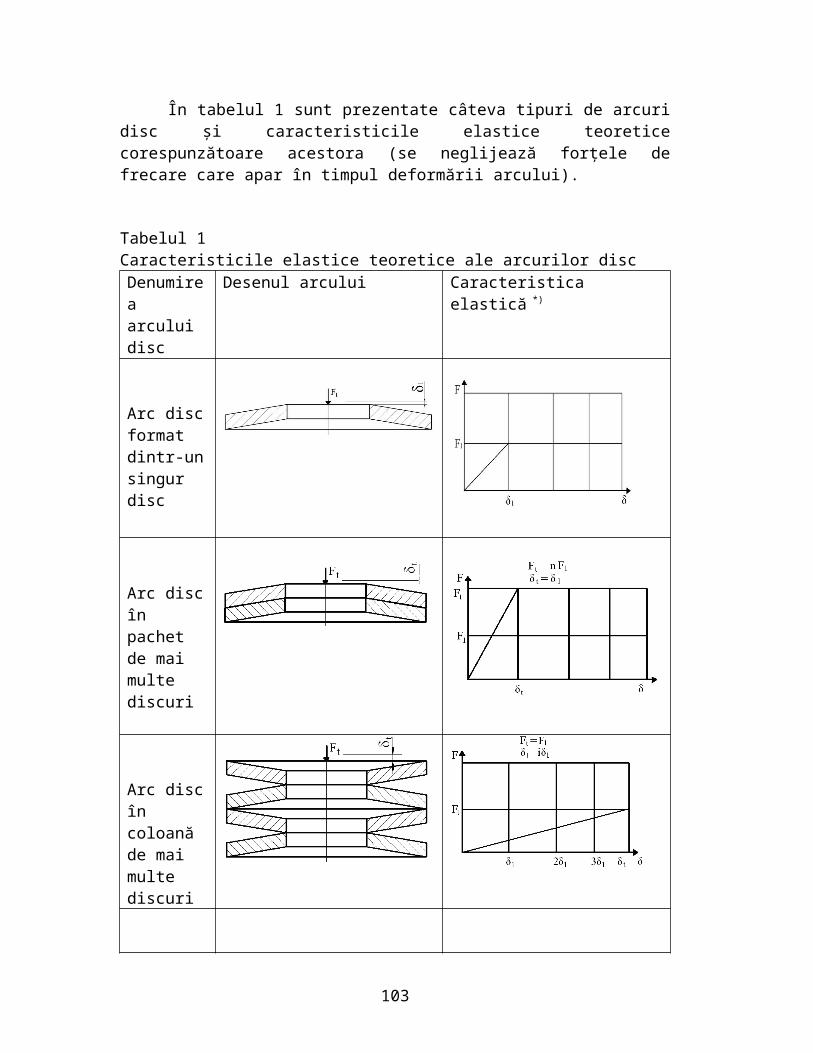
În tabelul 1 sunt prezentate câteva tipuri de arcuri disc şi caracteristicile
elastice teoretice corespunzătoare acestora (se neglijează forţele de frecare care apar în timpul deformării arcului).
Tabelul 1Caracteristicile elastice teoretice ale arcurilor discDenumirea arcului disc
Desenul arcului Caracteristica elastică *)
Arc disc format dintr-un singur disc
Arc disc în pachet de mai multe discuri
Arc disc în coloană de mai multe discuri
Arc disc în coloană de pachete cu acelaşi număr de discuri
99
Arc disc în coloană de discuri de grosime variabilă
Arc disc în coloană de pachete cu număr variabil de discuri
*) n – numărul de discuri dintr-un pachet ; i – numărul de discuri sau de pachete montate în coloană
Discurile se obţin prin ştanţare, urmată de o presare la cald şi un tratament termic. Ca materiale se recomandă tablă de oţel: OLC 85A pentru s<1,5 mm şi 56Si 17A pentru s>1,5 mm.
Avantajele utilizării arcurilor disc, sunt: gabarite reduse; preiau sarcini şi energii mari cu săgeţi relativ mici; siguranţă în funcţionare; deteriorarea unui disc nu scoate arcul din uz (îi schimbă numai caracteristica); rigiditatea arcului poate fi modificată prin alegerea corespunzătoare a discurilor şi a modului de combinare. Datorită acestor avantaje, arcurile disc se întâlnesc în componenţa: sistemelor de montare a matriţelor, ştanţelor, tampoanelor unor vehicule, fundaţiilor de maşini grele, montajelor cu rulmenţi cu pretensionare axială, construcţiilor elastice a unor tiranţi, sistemelor de asigurare a asamblărilor filetate (şaibe elastice) etc.
3. Prezentarea dispozitivului
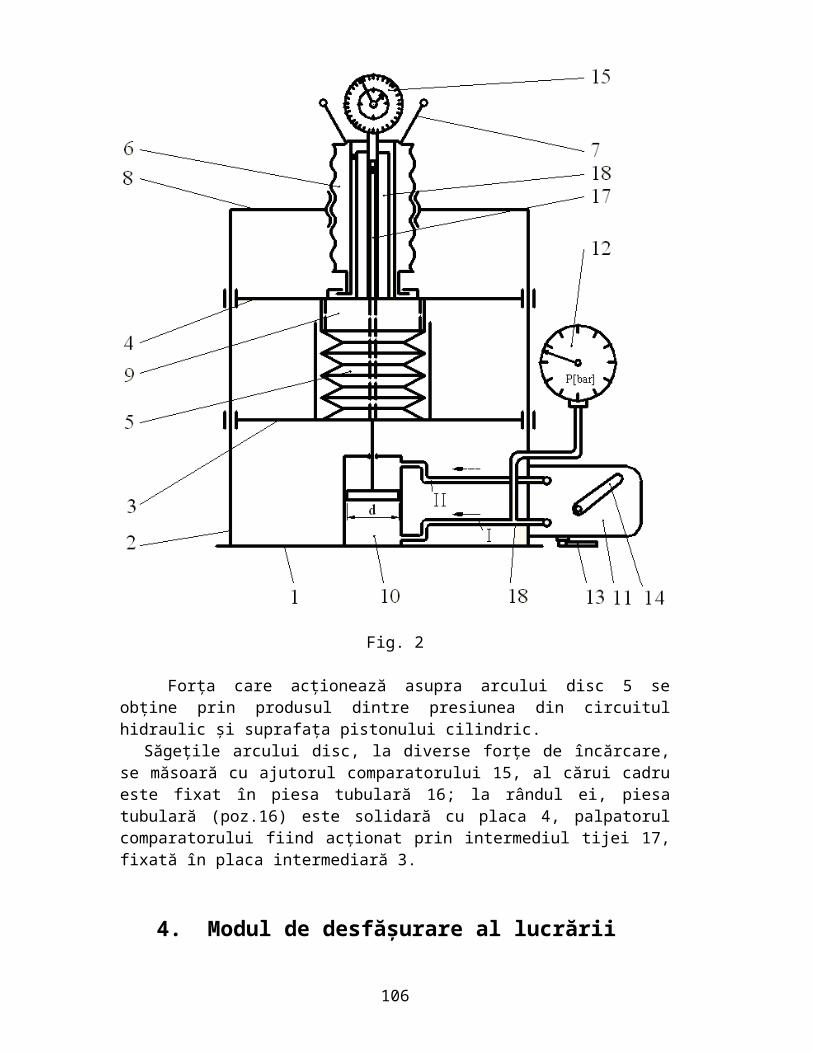
Dispozitivul (fig. 2) este compus din placa de bază (poz. 1) pe care se montează trei coloane (poz. 2); pe coloane culisează plăcile intermediare 3 şi 4; între aceste plăci este montat arcul disc 5 (aceasta este ghidat la exterior de o bucşă). Placa intermediară 4 este deplasată în lungul coloanelor 2 prin intermediul transmisiei formată din şurubul de mişcare 6 (acţionat cu ajutorul manetelor 7) şi piuliţa executată în placa superioară fixă 8.
Placa intermediară 4 se deplasează spre placa 3, până vine în contact cu bucşa de presiune 9, definindu-se astfel înălţimea arcului disc în stare liberă (poziţia de la care se încarcă arcul şi se ridică caracteristica).
100

Instalaţia hidraulică de încărcare cuprinde: cilindrul hidraulic 10; pompa 11, cu rezervor şi distribuitor, acţionată manual, prin intermediul manetei 14; două circuite hidraulice I şi II, pentru ridicarea, respectiv coborârea pistonului – care se pot selecta prin intermediul manetei distribuitorului 13 - şi din manometrul 12, pentru măsurarea presiunii din circuitul I, de ridicare. Cu ajutorul tijei pistonului hidraulic (poz. 10) se obţine deplasarea plăcii intermediare 3, care realizează încărcarea arcului disc
Fig. 2
Forţa care acţionează asupra arcului disc 5 se obţine prin produsul dintre presiunea din circuitul hidraulic şi suprafaţa pistonului cilindric.
Săgeţile arcului disc, la diverse forţe de încărcare, se măsoară cu ajutorul comparatorului 15, al cărui cadru este fixat în piesa tubulară 16; la rândul ei, piesa tubulară (poz.16) este solidară cu placa 4, palpatorul comparatorului fiind acţionat prin intermediul tijei 17, fixată în placa intermediară 3.
101
4. Modul de desfăşurare al lucrării
Pentru efectuarea lucrării de laborator se vor parcurge următoarele etape:- din tabelul 1 se alege o variantă de arc disc şi bucşa de centrare corespunzătoare;- se demontează piesa tubulară 16;- se demontează tija 17;- se aşează arcul disc (ales) 5, bucşa de centrare şi bucşa de presiune 9, pe placa
intermediară 3, după care se montează piesele 17 şi 16;- cu ajutorul transmisiei şurub-piuliţă se apropie placa intermediară 4, până la
contactul cu bucşa 9; se aduce cadranul ceasului comparator la indicaţia zero;- se comută maneta distribuitorului 13 pentru selectarea circuitului hidraulic I, în
care este plasată conducta 18, legată la manometru 12 şi se acţionează asupra manetei 14, introducându-se ulei în partea inferioară a cilindrului hidraulic 10; după fiecare apăsare a manetei 14, se citeşte presiunea indicată de manometrul 12 şi săgeata de deformaţie indicată de ceasul comparator 15; rezultatele obţinute în urma măsurătorilor succesive se trec în tabelul 2;
- după terminarea măsurătorilor, se comută maneta distribuitorului 13 pentru selectarea circuitului de revenire II; arcul se destinde şi împinge pistonul cilindrului hidraulic în jos şi uleiul în rezervorul pompei; în final, se îndepărtează, cu ajutorul transmisiei şurub-piuliţă, placa intermediară 4, arcul disc revenind la starea iniţială.
Tabelul 2
Denumirea arcului disc (conform tabel 1)
P,N/mm
F,N
d,mm
; d=50 mm ; 1 bar =0,1 N/mm .
102
5. Modul de elaborare al referatului lucrării de laborator
Referatul lucrării de laborator trebuie să cuprindă:- titlul lucrării;- scopul lucrării;- tabelul 1, care prezintă caracteristicile elastic teoretice ale arcurilor disc ;- schema dispozitivului (fig. 2), cu indicarea elementelor componente;- modul de desfăşurare al lucrării- tabelul 2, în care se vor complete datele obţinute în urma efectuării testelor.
103

Organe de maşini – Îndrumar pentru lucrări de laborator
LUCRAREA DE LABORATOR NR. 14
DETERMINAREA TURAŢIEI CRITICE LA ARBORII ORIZONTALI
1. Scopul lucrării
Scopul lucrării este acela de a determina experimental turaţia critică la un arbore orizontal şi compararea acesteia cu turaţia critică .
2. Noţiuni teoretice
În funţie de natura şi sensul de acţiune al forţelor şi momentelor exterioare perturbatoare, arborii pot fi supuşi unor vibraţii de încovoiere (flexionale), vibraţii torsionale sau vibraţii longitudinale.
Fenomenul de rezonanţă se produce cu condiţia ca perioada vibraţiei forţei exterioare să coincidă cu perioada vibraţiei proprii a arborelui. La rezonanţă amplitudinea vibraţiilor creşte foarte mult şi în arbore apar tensiuni care depăşesc rezistenţa admisibilă a materialului, putându-se produce deteriorarea sau chiar ruperea arborelui.
În cazul arborilor, fenomenul de rezontanţă se produce în momentul în care perioada de rotaţie a arborelui concide cu perioada vibraţiei proprii.
Turaţia critică reprezintă turaţia la care un arbore intră în rezonanţă. Pentru efectuarea calculelor de verificare la vibraţiile de încovoiere
(flexionale), se consideră un arbore vertical simplu rezemat pe care este montat la mijlocul distanţei dintre reazeme un disc (fig. 1), impunând următoarele ipoteze simplificatoare [27][33]:
- se neglijeajă masa proprie a arborelui;- se consideră că arborele este drept şi are secţiunea constantă pe întreaga lungime;- rigiditatea arborelui este constantă;- masa discului se consideră concentrată în centrul de masă al discului.Forţa centrifugă se obţine cu relaţia
, (1)
unde: este masa discului; - raza de rotaţie a centrului de masă al discului; - viteza unghiulară a arborelui (corespunzătoare turaţiei de regim n); - săgeata
104

dinamică; - distanţa dintre axa geometrică a arborelui şi cea a centrului de masă al discului.
Fig. 1
La stabilizarea mişcării, forţa centrifugă este egală cu forţa elastică internă
a arborelui
, (2)iar
, (3)în care reprezintă constanta elastică (rigiditatea statică a sistemului), fiind obţinută cu relaşia
, (4)
unde: este modulul de elasticitate longitudinal al materialului din care este executat arborele; I - momentul de inerţie axial; - distanţa dintre reazeme.
Cu ajutorul relaţiilor (1), (2) şi (3) se poate obţine săgeata dinamică
. (5)
În relaţia (5) se observă că la atingerea egalităţii , se obţine ,
iar ecuaţia pulsaţiei proprii a arborelui este de forma
, (6)
unde este viteza unghiulară corespunzătoare turaţiei .
Relaţia pentru calculul turaţiei critice va fi
(7)
sau
105
. ( )
Dacă arborele are o poziţie orizontală, greutatea a discului produce săgeata statică
, (8)
de unde rezultă
. (9)
Înlocuind relaţia (9) în relaţia ( ) se obţine
. (10)
Ţinând seama de egalitatea , ecuaţia (5) poate fi scrisă sub forma
(11)
sau
. ( )
Evoluţia raportului în funcţie de raportul este prezentată în figura 2.
Discuţia ecuaţiilor (11) şi ( ) conduce la următoarele concluzii:
- când arborele este în repaus ;
- pentru adică , , unde au acelaşi sens;
- când ;
- când , iar şi e au sensuri opuse (apare tendinţa
de autocentrare).
106
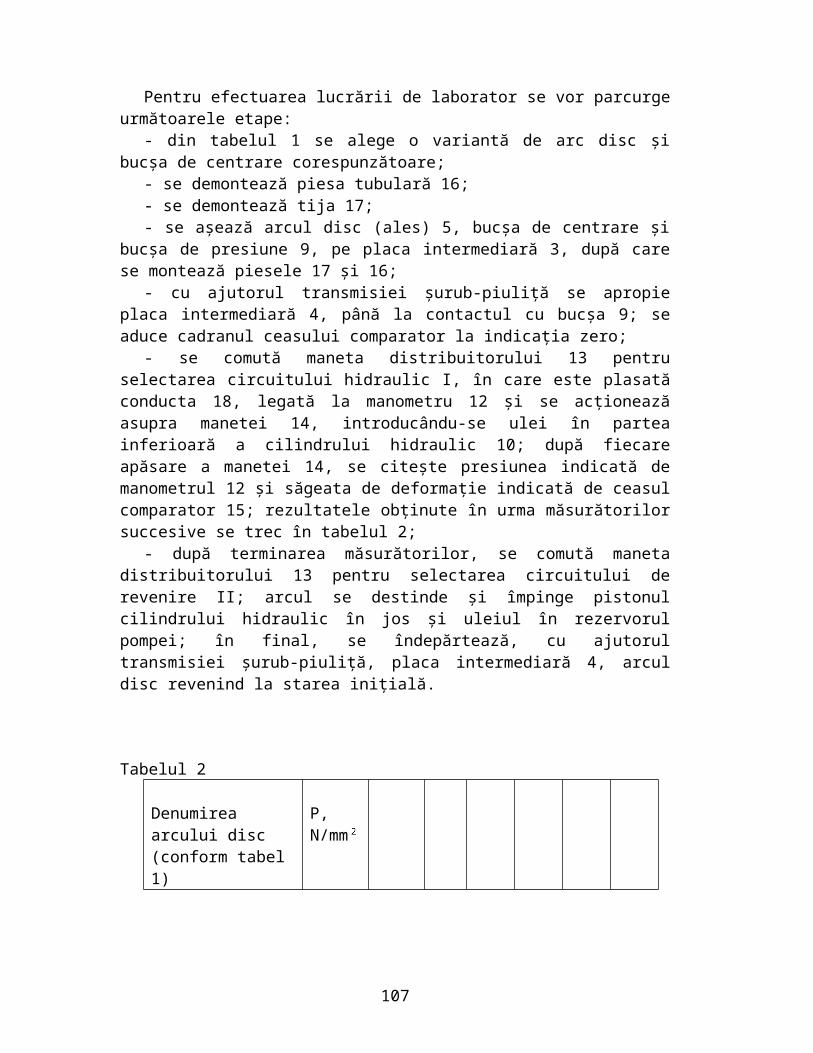
Fig. 2
3. Prezentarea dispozitivului
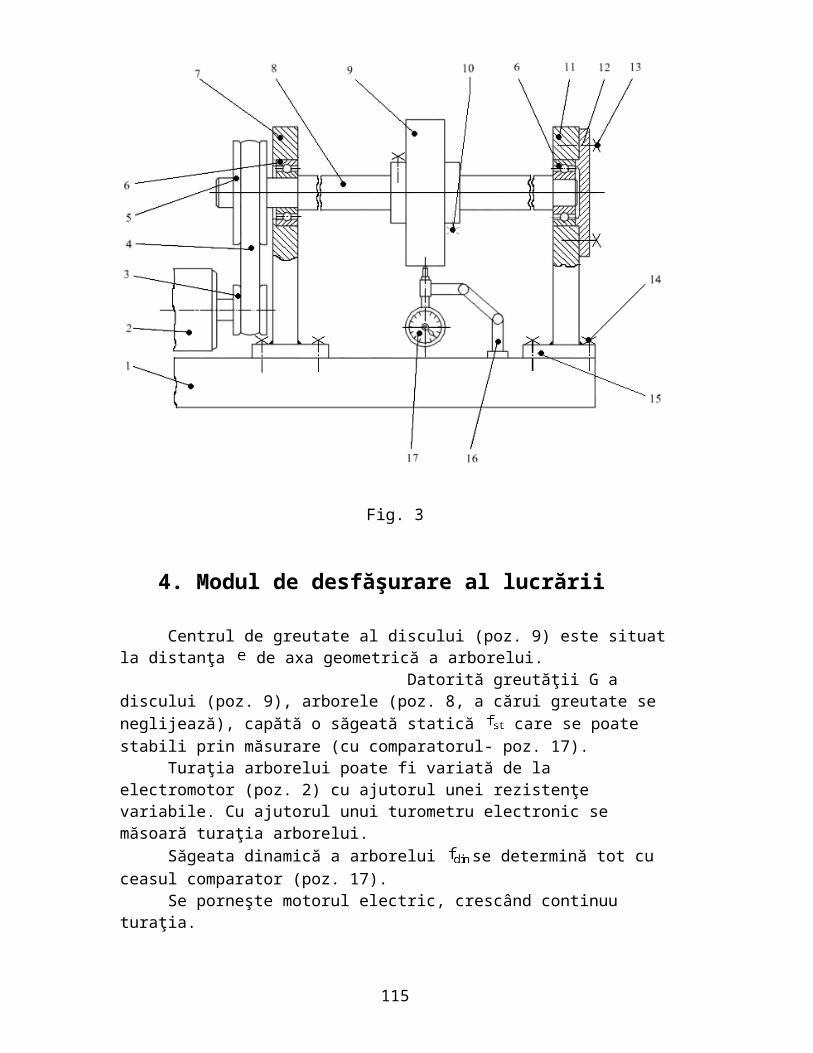
Din schema constructivă (fig. 3) rezultă că dispozitivul pentru determinarea turaţiei critice la arborii orizontali este compus din placa de bază (poz. 1), electromotor (poz. 2), roată cu curea conducătoare (poz. 3), curea trapezoidală (poz. 4), roată de curea condusă (poz. 5), lagărul de rostogolire (poz. 6), peretele vertical stânga (poz. 7), arborele orizontal (poz. 8) pe care se fixeaxă la jumătatea distanţei dintre lagăre, discul (poz. 9), care este fixat pe arbore cu şuruburi (poz. 10), peretele vertical dreapta (poz. 11), capacul (poz. 12) fixat cu şuruburile (poz. 13), iar şuruburile (poz. 14), fixează tălpile (poz. 15), pe placa de bază. Pe suportul (poz. 16), se montează ceasul comparator (poz. 17) cu care se stabilesc săgeţile arborelui orizontal.
107

Fig. 3
4. Modul de desfăşurare al lucrării
Centrul de greutate al discului (poz. 9) este situat la distanţa de axa geometrică a arborelui.
Datorită greutăţii G a discului (poz. 9), arborele (poz. 8, a cărui greutate se neglijează), capătă o săgeată statică care se poate stabili prin măsurare (cu comparatorul- poz. 17).
Turaţia arborelui poate fi variată de la electromotor (poz. 2) cu ajutorul unei rezistenţe variabile. Cu ajutorul unui turometru electronic se măsoară turaţia arborelui.
Săgeata dinamică a arborelui se determină tot cu ceasul comparator (poz. 17).
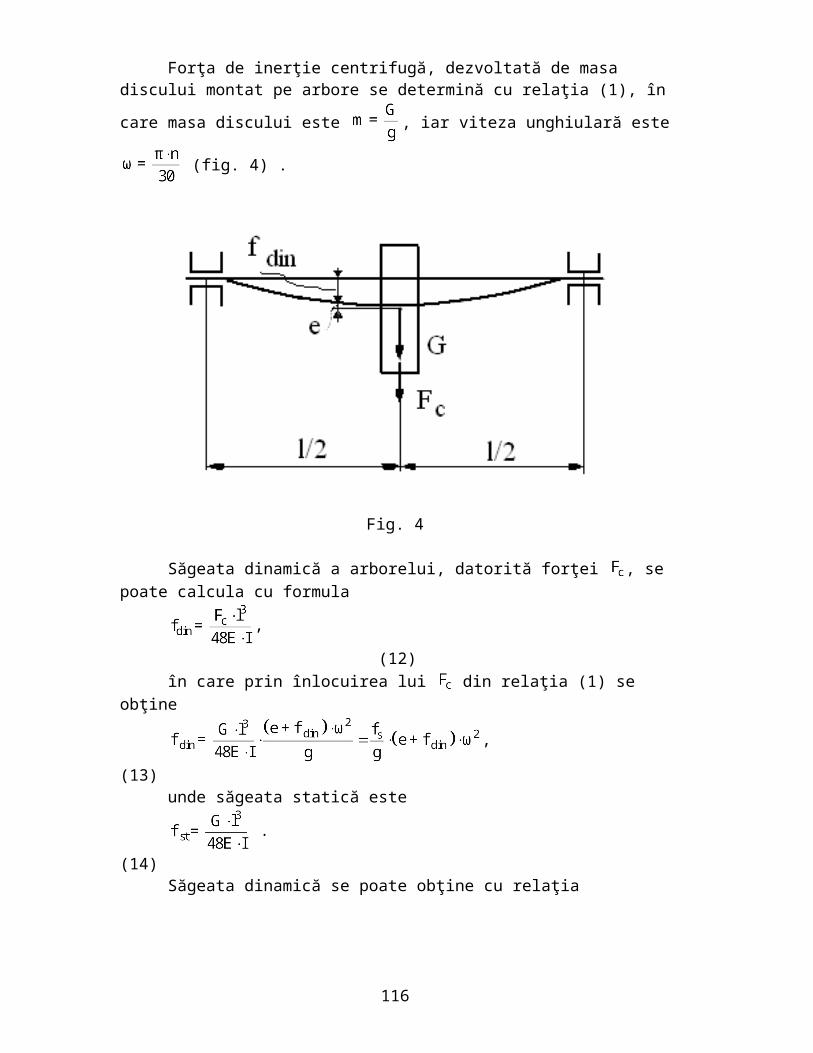
Se porneşte motorul electric, crescând continuu turaţia.Forţa de inerţie centrifugă, dezvoltată de masa discului montat pe arbore se
determină cu relaţia (1), în care masa discului este , iar viteza unghiulară este
(fig. 4) .
108
Fig. 4
Săgeata dinamică a arborelui, datorită forţei , se poate calcula cu formula
, (12)
în care prin înlocuirea lui din relaţia (1) se obţine
, (13)
unde săgeata statică este
. (14)
Săgeata dinamică se poate obţine cu relaţia
(15)
sau
, (16)
unde , în care este constanta elastică sau ,
în care şi .
Fenomenul de rezonanţă apare la turaţia critică când săgeata este maximă.
Pentru diferite valori ale turaţiei se măsoară săgeţile dinamice şi se completează tabelul 1.
109
n
Tabelul 1
Folosind datele din tabelul 1 se va trasa o diagramă (fig. 5, în care
).
Fig. 5
Pentru dispozitivul prezentat (fig. 3), săgeata statică se determină cu relaţia (14)
,
iar turaţia critică teoretică se calculează cu relaţia (10)
.
Turaţia critică teoretică se va compara cu turaţia critică determinată experimental.
110

4. Modul de elaborare al referatului lucrării de laborator
Referatul lucrării de laborator trebuie să cuprindă:- titlul lucării;- scopul lucrării;- schema dispozitivului (fig. 3);- modul de desfăşurare al lucrării;- tabelul 1 şi diagrama trasată în funcţie de datele cuprinse în acest tabel;- abaterea turaţiei critice teoretice faţă de cea determinată experimental.
Organe de maşini – Îndrumar pentru lucrări de laborator
111

LUCRAREA DE LABORATOR NR. 15
STUDIUL CUPLAJELOR INTERMITENTE CU FRICŢIUNE
1. Scopul lucrării
Lucrarea de laborator are drept scop prezentarea cuplajelor intermediare cu fricţiune, precum şi determinarea variaţiei vitezelor unghiulare ale elementelor conductor şi condus.
2. Noţiuni teoretice
Cuplajele realizează legătura permanentă sau intermediară între două elemente consecutive ale unui lanţ cinematic, în scopul transmiterii momentului de torsiune şi a mişcării de rotaţie, fără a modifica, de regulă, legea de transmitere.
Cuplajele intermitente (comandate) cu fricţiune cuprind o mare diversitate de construcţii, realizate cu diferite configuraţii ale suprafeţelor de frecare şi cu diferite sisteme de comandă.
Cuplajele intermitente cu suprafeţe de frecare plane sunt prevăzute cu discuri plane de fricţiune, în construcţie monodisc sau multidisc.
Procesul de cuplare, în cazul cuplajelor intermitente cu fricţiune, este complex, având influenţă asupra transmiterii momentului de torsiune şi durabilităţii cuplajului.
Cuplarea, pentru cuplajele intermitente cu fricţiune, se poate exprima prin ecuaţii diferenţiale (fig. 1) [24]:
; (1)
, (2)
unde: este momentul de torsiune al motorului; - momentul de
torsiune rezistent; - momentul de frecare din cuplaj; - momentele de inerţie masice ale părţii conducătoare, respectiv ale părţii conduse, reduse la arborele cuplajului; - vitezele unghiulară a semicuplajului conducător, respectiv condus.
112

Procesul de cuplare al cuplajelor cu fricţiune se desfăşoară în trei etape (fig. 2).
Fig. 1
Fig. 2
113
Prima etapă începe după primirea comenzii şi durează un timp notat cu .
Valoarea timpului depinde de: reacţia sistemului de comandă, jocurile din lanţul cinematic al comenzii mecanice, rezistenţele hidraulice sau pneumatice (pentru comanda hidrostatică, respectiv pneumostatică), impedanţa circuitului de comandă (pentru comanda electromagnetică). În această etapă, momentul de frecare din cuplaj
, creşte liniar până la valoarea momentului rezistent , iar vitezele unghiulare
rămân nemodificate (fig. 2).
A doua etapă se desfăşoară în timpul de patinare . Această etapă se caracterizează prin decelerarea părţii conducătoare şi accelerarea părţii conduse şi se încheie când vitezele unghiulare devin egale. Viteza unghiulară scade mai accentuat în cazul acţionării cu motoare cu ardere internă (fig. 2, a – cu linie întreruptă) şi mai lent în cazul acţionării cu motoare electrice asincrone trifazate ( fig. 2, a – cu linie continuă).
Pentru uşurarea calculelor se consideră momentul de torsiune rezistent
constant şi creşterea într-un timp scurt a forţei de cuplare şi a momentului de
frecare din cuplaj . În aceste condiţii se introduc ipotezele simplificatoare
conform cărora constant şi momentul de accelerare constant (fig. 2, b). Astfel, prin integrarea ecuaţiilor diferenţiale (1), se obţine:
; (2)
,
în care este viteza unghiulară a părţii conducătoare (înainte de începerea procesului de cuplare).
În condiţiile enunţate şi considerând constant, prin folosirea relaţiilor
(2) se obţine o variaţie liniară a vitezelor unghiulare :
; (3)
114
. (4)
Pentru acţionarea cu motoare electrice asincrone trifazate se poate scrie
constant, de unde, cu relaţia (3), rezultă . Din relaţia (4), pentru , se
obţine, de asemenea, o variaţie liniară a vitezei unghiulare
. (5)
Timpul de patinare se determină din condiţia ca la sfârşitul acestei etape, între discuri să nu mai existe patinare, adică viteza unghiulară relativă să fie
.Cu relaţiile (3), (4) şi (5) se obţin timpii de patinare în cazul acţionării cu
motoare cu ardere internă, respectiv cu motoare electrice asincrone trifazate:
; (6)
. (7)
A treia etapă se desfăşoară în timpul . În această etapă întregul sistem este
adus la viteza unghiulară de regim .
Deoarece momentul de accelerare , momentul de torsiune transmis de
cuplaj, în această etapă este .Trebuie menţionat că această etapă (etapa a treia), lipseşte în cazul acţionării
cu motoare electrice asincrone (fig. 2, a).
3. Prezentarea dispozitivului
115
Dispozitivul (fig. 3) pentru studiul cuplajelor intermitente cu fricţiune este compus din elementele: semicuplajul 1, discul condus 2, discul de fricţiune 3, motorul electric asincron trifazat 4, reductorul 5, frâna cu bandă 6, greutăţile 7, pârghia 8, volantul 9, pârghia 10, manşonul 11, maneta cu excentric 12, greutăţile 13, scripetele 14, oscilograful 15, generatoarele turometrice 16 şi 17 şi transmisiile prin curele trapezoidale 18 şi 19.
Cu ajurotul motorului electric asincron trifazat (4) (P=2,2kW, n=710 ) şi
reductorului 5, este antrenat în mişcare semicuplajul 1 şi discul de fricţiune 3 (montat prin caneluri). Semicuplajul 2 (având rol de disc de presiune), este montat pe capătul arborelui condus al dispozitivului, având posibilitatea deplasării axiale, în vederea cuplării.
Sistemul de încărcare cu sarcini statice este compus din discul condus 2 şi frâna cu bandă 6 care este acţionată cu ajutorul greutăţilor 7 şi a pârghiei 8 (frâna cu bandă 6 realizează momentul de torsiune rezistent ).
Dacă se doreşte încărcarea cu mase inerţiale, care trebuie accelerate, sistemul de încărcare va fi compus din discul condus 2, tamburul frânei 6 şi volantul 9.
Comanda de cuplare este dată de maneta cu excentric 12, care acţionează pârghia 10 şi deplasează manşonul 11, solidar cu semicuplajul 2. Forţa de cuplare se obţine cu ajutorul greutăţilor 13, care sunt montate pe o tijă legată de un cablu trecut peste scripetele 14. Cablul acţionează asupra capătului pârghiei 10, rezultând forţa de cuplare
, (8)
unde: a = 340mm ; b = 210mm.
Oscilograful 15 (tip 8LS-1) înregistrează variaţia vitezelor unghiulare . Semnalul electric (variabil în timp, în funcţie de turaţie), este preluat de
oscilograf prin intermediul unei cutii de rezistenţe tip AS101, de la două generatoare turometrice 16 şi 17. Generatoarele turometrice sunt acţionate de transmisiile trapeziodale 18 şi 19, cu raportul de transmitere egal cu unu, de arborii conducător şi condus ai dispozitivului.
116

Fig. 3
4. Modul de desfăşurare al lucrării
Studiul cuplajelor intermitente cu fricţiune constă în observarea procesului de cuplare. Astfel, se vor înregistra variaţiile vitezelor unghiulare , obţinute
pentru câteva situaţii distincte (prin modificarea momentului rezistent şi/sau a
forţei de cuplare ) şi compararea timpului de patinare între situaţiile concrete
experimentate. Cu relaţia (8), în funcţie de greutatea se determină forţa de cuplare
, iar greutatea fiind proporţională cu momentul de torsiune , rezultatele obţinute se vor interpreta în funcţie de această greutate.
117

Lucrarea de laborator cuprinde următoarele etape:- se aşează maneta 12 în poziţia decuplat;- se stabileşte o valoare a momentului rezistent , prin aşezarea greutăţilor 7;- se stabileşte o valoare a forţei de cuplare , prin aşezarea greutăţilor 13;
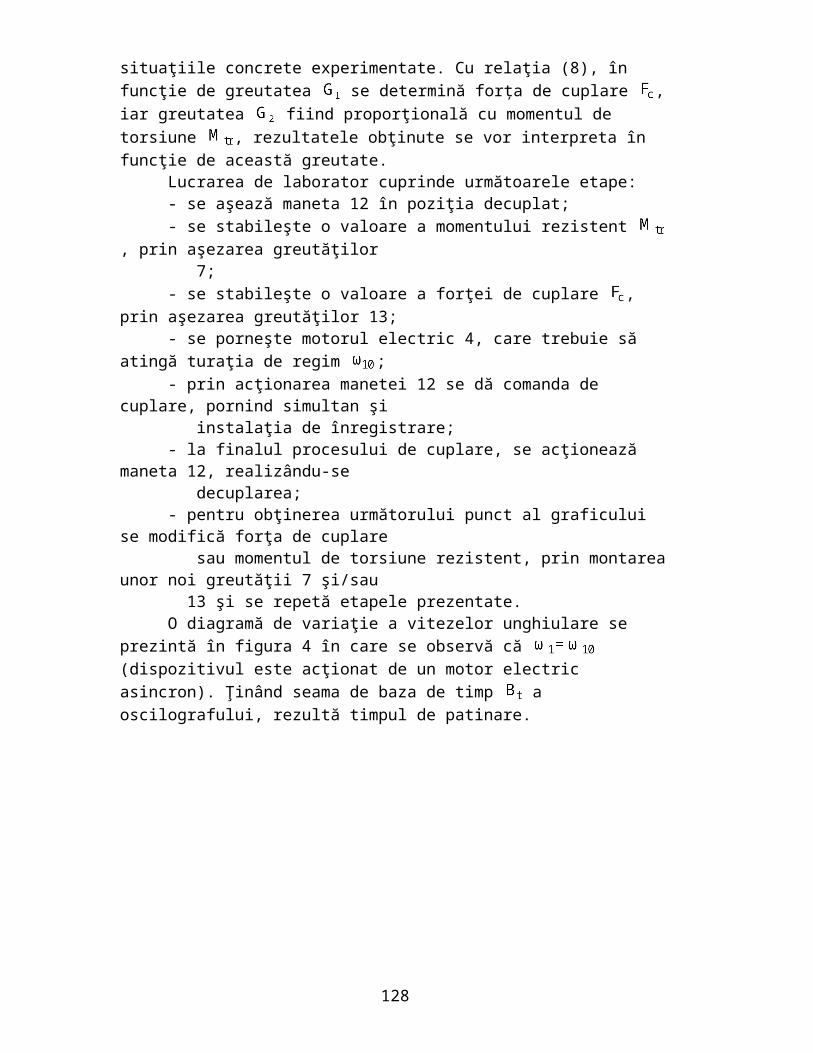
- se porneşte motorul electric 4, care trebuie să atingă turaţia de regim ;- prin acţionarea manetei 12 se dă comanda de cuplare, pornind simultan şi instalaţia de înregistrare;- la finalul procesului de cuplare, se acţionează maneta 12, realizându-se decuplarea;- pentru obţinerea următorului punct al graficului se modifică forţa de cuplare sau momentul de torsiune rezistent, prin montarea unor noi greutăţii 7 şi/sau 13 şi se repetă etapele prezentate. O diagramă de variaţie a vitezelor unghiulare se prezintă în figura 4 în care se
observă că (dispozitivul este acţionat de un motor electric asincron).
Ţinând seama de baza de timp a oscilografului, rezultă timpul de patinare.
Fig. 4
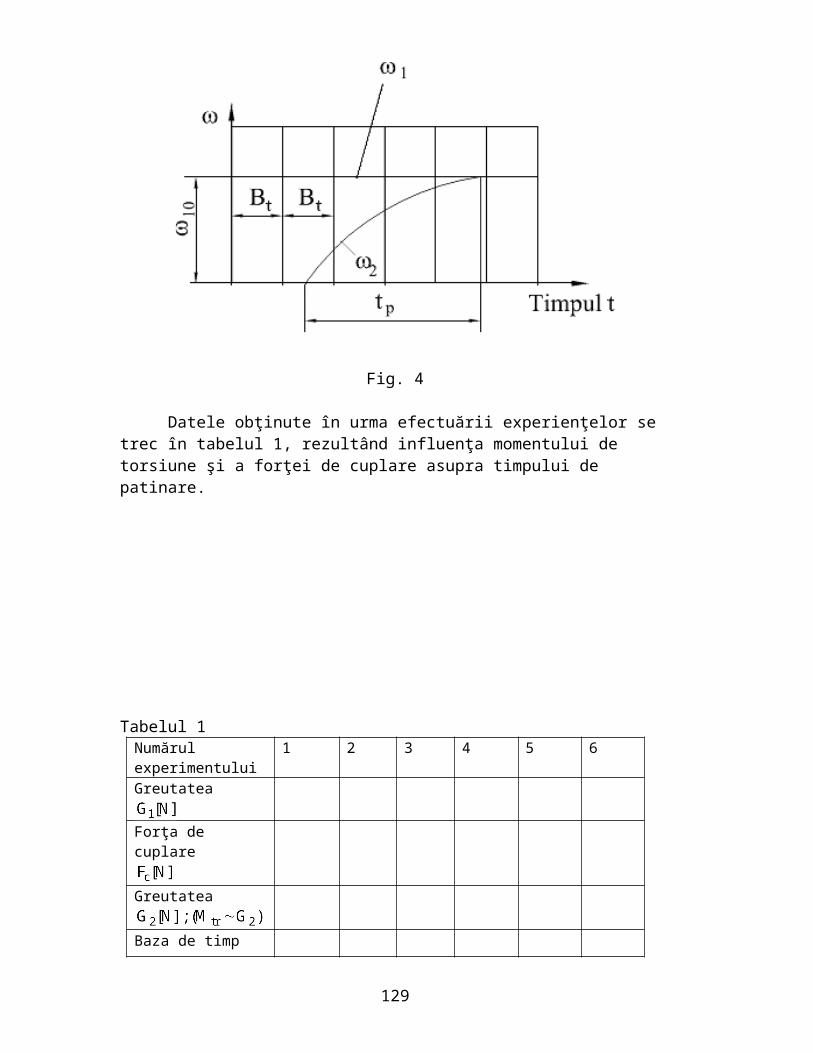
Datele obţinute în urma efectuării experienţelor se trec în tabelul 1, rezultând influenţa momentului de torsiune şi a forţei de cuplare asupra timpului de patinare.
118
Tabelul 1Numărul experimentului
1 2 3 4 5 6
Greutatea
Forţa de cuplare
Greutatea
Baza de timp
Timpul de patinare
5. Modul de elaborare al referatului lucrării de laborator
Referatul lucrării de laborator trebuie să cuprindă:- titlul lucrării;- scopul lucrării;- explicarea teoretică a fenomenului cuplării (fig. 1);- diagramele de variaţie ale vitezelor unghiulare şi a momentului de frecare din cuplaj (fig. 2);- schema dispozitivului (fig. 3), cu indicarea elementelor componente;- tabelul 1, completat cu datele obţinute în urma efectuării experienţelor;- diagrama de variaţie a vitezelor unghiulare ;- concluzii cu privire la timpul de patinare.
Organe de maşini – Îndrumar pentru lucrări de laborator
119

LUCRAREA DE LABORATOR NR. 16
DETERMINAREA MOMETULUI DE TORSIUNE TRANSMIS DE UN CUPLAJ DE SIGURANŢĂ CU
BILE
1. Scopul lucrării
Lucrarea de laborator are ca scop determinarea variaţiei momentului de torsiune transmis de un cuplaj de siguranţă cu bile.
2. Noţiuni teoretice
Cuplajele de siguranţă cu transmiterea intermitentă a momentului de torsiune (în procesul decuplării), pot fi cu galeţi, cu bile, cu craboţi.
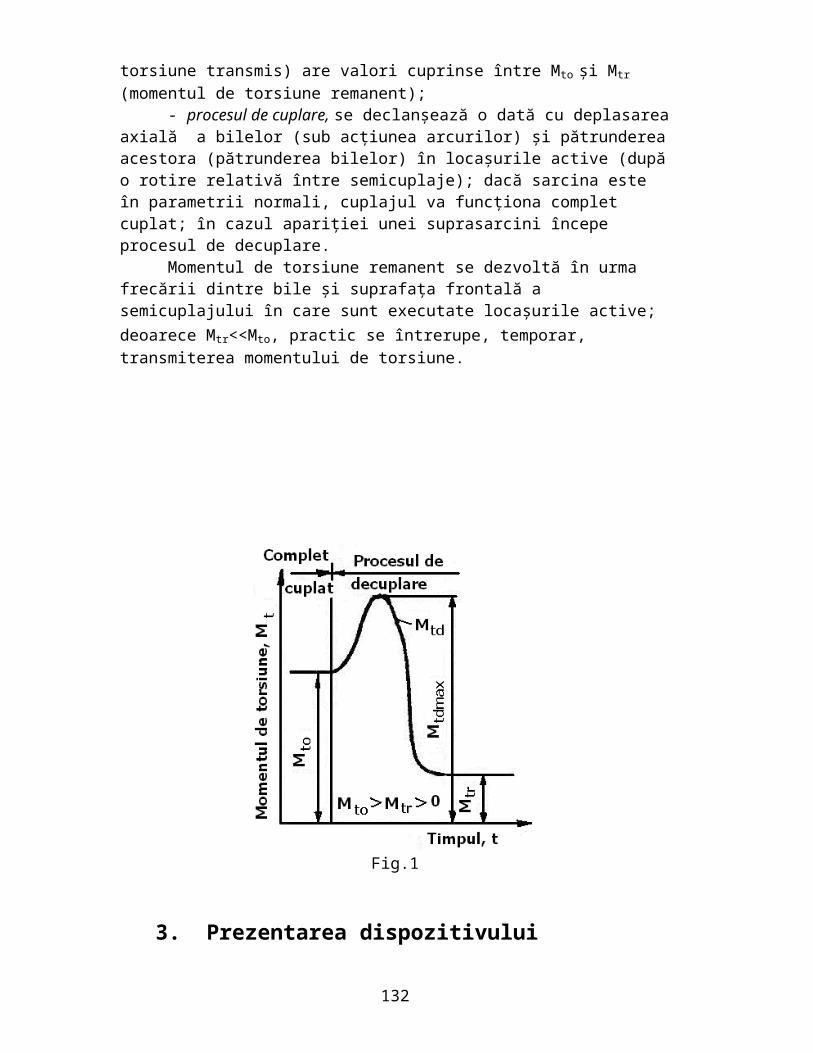
Cuplajele de siguranţă cu bile se utilizează pe scară largă în construcţia de maşini-unelte, maşini-unelte automate, maşini agricole etc., fiind simple constructiv şi având o mare fiabilitate. Aceste cuplaje, în funcţionare, se pot întâlni în trei situaţii distincte [24] : - situaţia de funcţionare complet cuplat, când momentul de torsiune transmis (care solicită cuplajul) nu depăşeşte momentul de torsiune Mto (care poate fi transmis de cuplaj în această situaţie – fig.1);
- procesul de decuplare, când apare o mişcare relativă între semicuplaje (din cauza creşterii momentului de torsiune transmis) are valori cuprinse între Mto şi Mtr (momentul de torsiune remanent); - procesul de cuplare, se declanşează o dată cu deplasarea axială a bilelor (sub acţiunea arcurilor) şi pătrunderea acestora (pătrunderea bilelor) în locaşurile active (după o rotire relativă între semicuplaje); dacă sarcina este în parametrii normali, cuplajul va funcţiona complet cuplat; în cazul apariţiei unei suprasarcini începe procesul de decuplare.
Momentul de torsiune remanent se dezvoltă în urma frecării dintre bile şi suprafaţa frontală a semicuplajului în care sunt executate locaşurile active; deoarece Mtr<<Mto, practic se întrerupe, temporar, transmiterea momentului de torsiune.
120
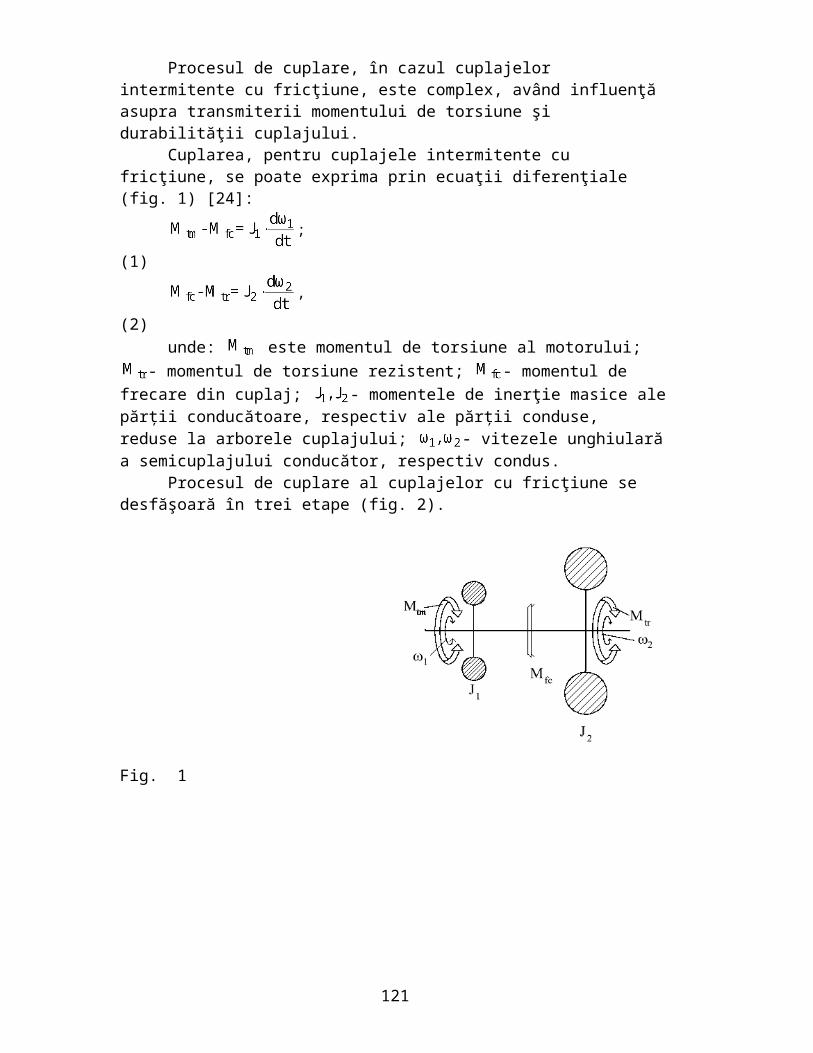
Fig.1
3. Prezentarea dispozitivului
În figura 2 este prezentată schema de principiu a dispozitivului pentru studiul comportări cuplajelor de siguranţă; în figura 3 este prezentată schema structurală a aceluiaşi dispozitiv.
Semicuplajul (poz.1; face parte din cuplajul de încercat; cuplajul este montat pe capetele a doi arbori) este pus în mişcare de grupul de antrenare (motorul electric de curent continuu 3 şi reductorul 4). Semicuplajul (poz. 2) este montat pe un capăt al arborelui (poz. 5); la celălalt capăt al acestui arbore acţionează sistemul de încărcare al instalaţiei. Cuplajul de siguranţă folosit are bile şi canale trapezoidale dispuse frontal, iar bilele sunt acţionate de arcuri elicoidale. Pentru efectuarea testelor (analiza influenţei profilului canalului trapezoidal asupra momentului de torsiune transmis de cuplaj) în condiţii bune, canalele (trapezoidale) s-au executat pe partea frontală a discului (poz. 6, care se montează pe semicuplajul 2); pe disc s-au executat canale cu profile diferite .
Frâna electromagnetică ( poz. 8, a cărei parte conducătoare este montată pe arborele 5) şi un captor de forţă (poz. 9, realizat dintr-un inel elastic, pe care sunt montate, în punte completă, patru traductoare rezistive), compun sistemul de încărcare; captorul (poz. 9) este fixat între tamburul 10 (solidar cu partea condusă a frânei electromagnetice) şi cadrul instalaţiei; când frâna electromagnetică (poz.8) este cuplată, se produce încărcarea instalaţiei. În procesul de cuplare şi cel de decuplare, sistemul de măsurare şi înregistrare preia simultan informaţii referitoare la momentul de torsiune transmis (de cuplaj) şi la unghiul de rotire relativă dintre semicuplaje. Măsurarea şi înregistrarea momentului de torsiune transmis de cuplaj se realizează cu ajutorul punţii tensometrie (preia semnalului analogic furnizat de traductoarele electrice şi îl transformă în semnal numeric preluat de interfaţă – fig.4).
121
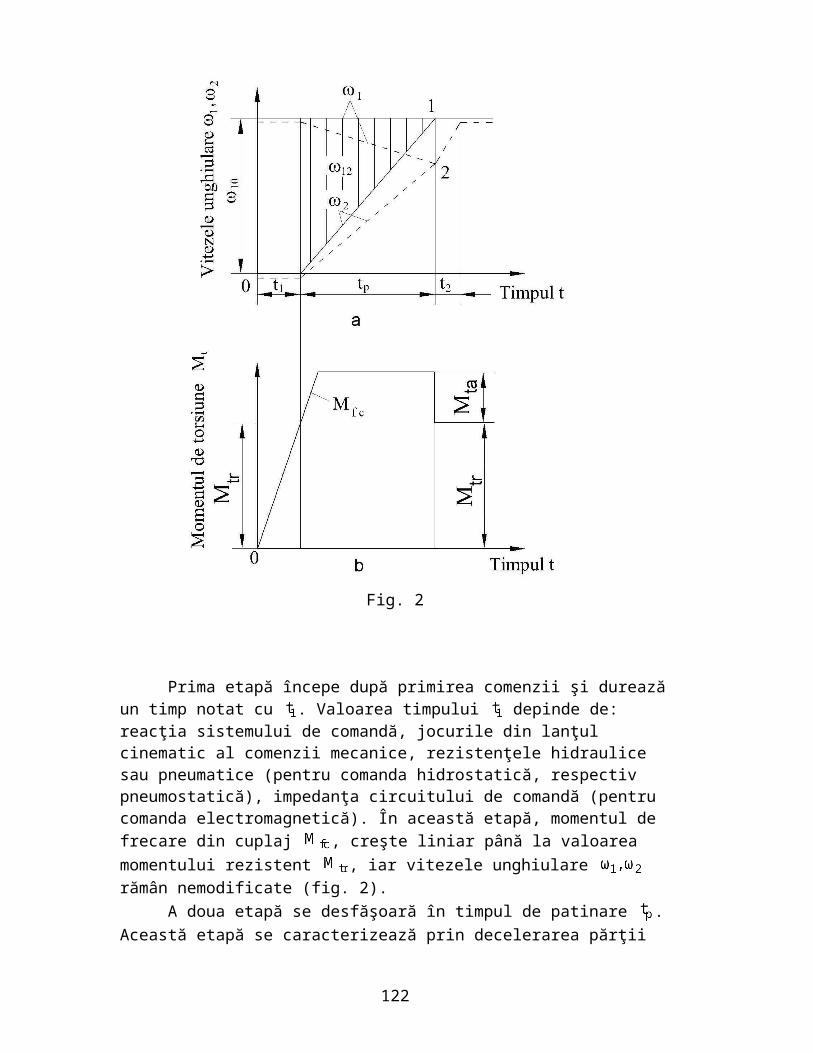
Fig. 2
122
Fig. 3
Fig. 4
Unghiul de rotire relativă dintre semicuplaje se măsoară şi se înregistrează cu ajutorul unui sistem care cuprinde: transmisiile prin curele sincrone 13 şi 14, cu raportul de transmitere egal cu unu; mecanismul diferenţial conic, format din roţile centrale 15 şi16, sateliţii 17 şi 18 şi braţul port-satelit 19 (H); inversorul de sens, format din roţile cilindrice 20 şi 21, cu raportul de transmitere egal cu minus unu; traductorul unghiular cu impulsuri TIRO (poz. 24 din fig. 2 şi 3). În mecanismul diferenţial conic, între mişcările roţilor centrale 15 şi 16 şi mişcarea braţului port-satelit 19(H) există relaţia: ω15+ ω16 = 2ωH . În funcţionarea complet cuplat a cuplajului, între cele două semicuplaje 1 şi 2 nu există mişcare relativă şi unghiurile de rotire φ15 şi φ16 şi vitezele unghiulare ω15 şi ω16 ale roţilor centrale sunt egale, dar de sens contrar ( ), deoarece i20-21 = -1; pentru braţul port-sateliţi 19(H), rezultă ωH = 0 şi traductorul unghiular (poz. 24) nu emite nici un impuls.
123
Între semicuplajele 1 şi 2 apare o mişcare relativă o dată cu începerea procesului de decuplare; roţile centrale se vor roti cu unghiuri diferite | φ15 | ≠ | φ16 | şi
viteze unghiulare diferite ; rezultă, pentru braţul port-sateliţi19(H) viteza
unghiulară . În această situaţie, traductorul unghiular TIRO emite un număr de impulsuri proporţional cu unghiul de rotire relativă dintre semicuplaje, impulsuri preluate de interfaţă. Aceasta (interfaţa) cuprinde un circuit de interfaţă paralelă programabilă (pentru preluarea informaţiei de la puntea tensometrică) şi un sumator (pentru contorizarea impulsurilor preluate de la traductorul unghiular TIRO) putând furniza (în orice moment) informaţii privind momentul de torsiune transmis de cuplaj şi unghiul de rotire relativă dintre semicuplaje, corespunzător acestui moment. Informaţiile sunt preluate şi prelucrate printr-un program care cuprinde două faze: în prima fază datele sunt preluate de la interfaţă (la un interval de timp de ≈ 20ms, pentru o rotaţie completă a semicuplajului 1) şi sunt stocate în memoria calculatorului; în faza a doua, datele stocate în memorie sunt prelucrate şi prezentate pe displayul calculatorului, sub formă de diagramă de variaţie a momentului de torsiune, în funcţie de unghiul de rotire relativă dintre semicuplaje.
Turaţia poate fi modificată prin variaţia curentului de alimentare a motorului electric 3; măsurarea turaţiei se face cu ajutorul traductorului de proximitate 27 (care sesizează impulsurile provenite de la şase plăcuţe metalice – poz. 25); plăcuţele (poz. 25), sunt montate pe bolţurile cuplajului elastic 26, care realizează legătura dintre reductorul 4 şi arborele care antrenează semicuplajului conducător 1 (impulsurile sunt numărate, timp de 10 secunde, de un numărător universal, rezultând turaţia cuplajului).
4. Modul de desfăşurare al lucrării
Cuplajul folosit pentru studiu este astfel proiectat încât să permită modificarea parametrilor constructivi; în acest sens, semicuplajul în care sunt executate canalele trapezoidale este format din butucul 2 al semicuplajului şi partea activă 6 (fig. 3), de forma unui disc cu canale trapezoidale, montat pe butuc prin intermediul a patru şuruburi de păsuire; sunt executate două asemenea discuri, fiecare având patru canale trapezoidale, două câte două (dispuse diametral) cu aceleaşi dimensiuni; în aceste condiţii se pot testa patru variante de cuplaje de siguranţă care diferă prin unghiul profilului activ al locaşului (30˚ şi 45˚ - pentru un disc şi 60˚ şi 75˚ - pentru al doilea disc). Semicuplajul 1 este proiectat pentru două dimensiuni de bile (Ø12 şi Ø20), astfel că se pot testa opt variante de cuplaje de siguranţă; de asemenea, se pot utiliza arcuri elicoidale cilindrice cu rigidităţi diferite pentru apăsarea bilelor în locaşurile active.
Studiul experimentului al comportării unui cuplaj de siguranţă cu bile, presupune parcurgerea, următoarelor etape : - se alege unul din cele două discuri; - se stabileşte diametrul bilelor; - se montează şi se reglează arcurile de apăsare a bilelor; - se montează aparatura necesară alimentării motorului electric de curent continuu şi a frânei electromagnetice, precum şi pentru măsurarea turaţiei şi
124
înregistrarea variaţiei momentului de torsiune şi a unghiului de rotire relativă dintre semicuplaje; - se porneşte motorul electric, cuplajul funcţionând complet cuplat; - se comandă programul de înregistrare şi se cuplează frâna electromagnetică; cuplajul se va decupla, iar calculatorul va înregistra semnalele provenite de la interfaţă; - după o rotire completă a cuplajului, se decuplează frâna electromagnetică, se opreşte motorul şi se trasează, pe displayul calculatorului, diagrama de variaţie a momentului de torsiune şi a unghiului de rotire relativă dintre semicuplaje; diagrama poate fi listată cu ajutorul unei imprimante grafice, după care se poate relua ciclul, pentru alţi parametrii constructivi ai cuplajului.
5. Modul de elaborare al referatului lucrării de laborator
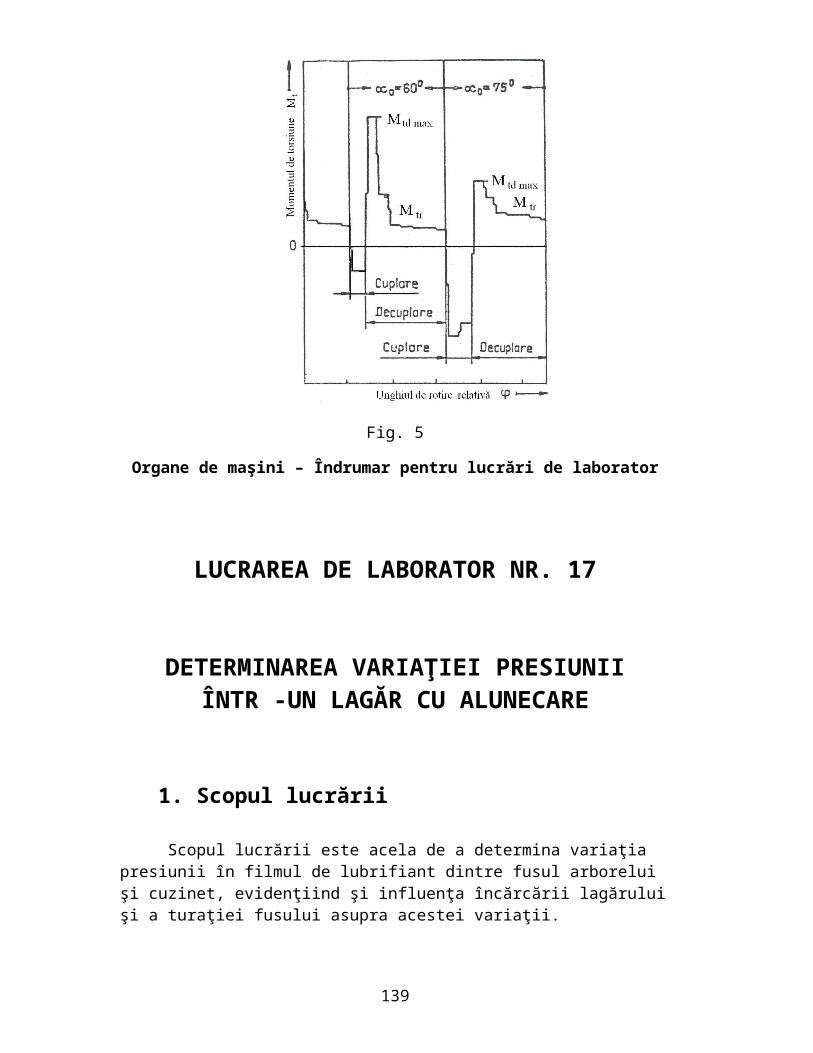
Referatul lucrării de laborator trebuie să cuprindă : - titlul lucrării; - scopul lucrării; - situaţiile întâlnite în funcţionarea cuplajului; - schema dispozitivului (fig. 3), cu indicarea părţilor componente ale dispozitivului; - etapele necesare pentru efectuarea lucrării; - diagrame de variaţie a momentelor de torsiune transmise de diverse variante constructive de cuplaje de siguranţă cu bile; se vor indica momentul Mtdmax şi momentul Mtr , precum şi procesul de decuplare şi cel de cuplare (fig. 5 – canale trapezoidale de 60˚ şi 75˚, cu bile de Ø20 mm); se vor specifica unghiul al locaşurilor active şi diametrul bilei d0
Fig. 5
125
Organe de maşini – Îndrumar pentru lucrări de laborator
LUCRAREA DE LABORATOR NR. 17
DETERMINAREA VARIAŢIEI PRESIUNIIÎNTR -UN LAGĂR CU ALUNECARE
1. Scopul lucrării
Scopul lucrării este acela de a determina variaţia presiunii în filmul de lubrifiant dintre fusul arborelui şi cuzinet, evidenţiind şi influenţa încărcării lagărului şi a turaţiei fusului asupra acestei variaţii.
2. Noţiuni teoretice
Funcţionarea instalaţiilor, maşinilor, mecanismelor şi organelor (de maşini) este, în general, condiţionată de diferite procese complexe de frecare - uzare - ungere.
Ungerile hidrodinamică sau hidrostatică asigură condiţiile unei funcţionări prin care uzările suprafeţelor de contact sunt reduse (se reduc şi forţelor de frecare).
Realizarea unui film autoportant, hidrodinamic se datorează mişcării relative a suprafeţelor, interstiţiului convergent (pană) în direcţia mişcării şi lubrifiantului cu o anumită vâscozitate şi în cantitate suficientă.
Studiul variaţiei presiunii în pelicula de lubrifiant formată pe periferia fusului radial (pe zona de contact a suprafeţelor care formează o cuplă cinematică de rotaţie) uns hidrodinamic, se poate efectua pornind de la relaţia generală, stabilită în cazul ungerii hidrodinamice a doua suprafeţe plane [22]
(1)
unde: p este presiunea în secţiunea definită de coordonata x; η – vâscozitatea dinamică a lubrifiantului; u – viteza relativă; h – grosimea filmului de lubrifiant, în secţiunea x; hm – grosimea filmului de lubrifiant, în zona în care presiunea este
maximă (p = pmax ).Pentru cazul fusului radial, ecuaţia (1) se va particulariza, prin: se consideră ca
axă de referinţă, linia centrelor (fig. 1); legătura dintre mărimea interstiţiului h şi dimensiunile fusului r, respectiv lagărului R, definită prin
(2)
presiunea în secţiunea curentă se stabileşte cu relaţia
126

(3)
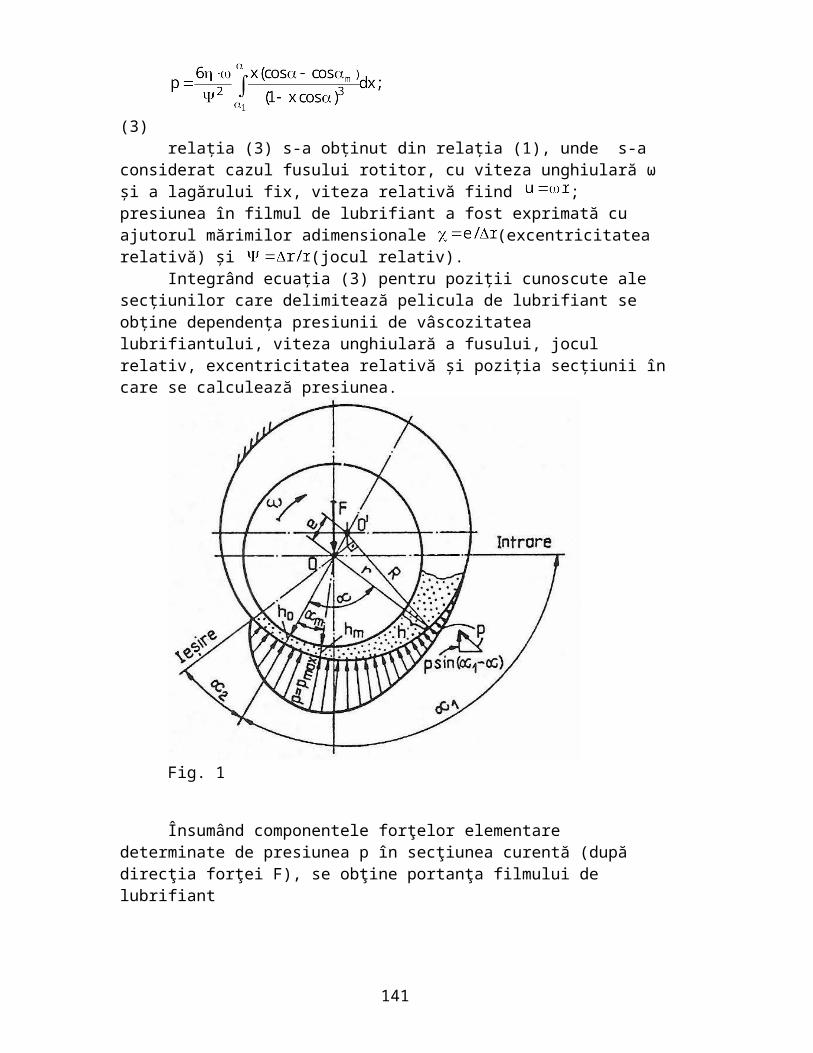
relaţia (3) s-a obţinut din relaţia (1), unde s-a considerat cazul fusului rotitor, cu viteza unghiulară ω şi a lagărului fix, viteza relativă fiind ; presiunea în filmul de lubrifiant a fost exprimată cu ajutorul mărimilor adimensionale (excentricitatea relativă) şi (jocul relativ). Integrând ecuaţia (3) pentru poziţii cunoscute ale secţiunilor care delimitează pelicula de lubrifiant se obţine dependenţa presiunii de vâscozitatea lubrifiantului, viteza unghiulară a fusului, jocul relativ, excentricitatea relativă şi poziţia secţiunii în care se calculează presiunea.
Fig. 1
Însumând componentele forţelor elementare determinate de presiunea p în secţiunea curentă (după direcţia forţei F), se obţine portanţa filmului de lubrifiant
(4)unde parametrul adimensional
, (5)
caracterizează poziţia fusului în lagăr şi care este calculat, numeric, în funcţie de unghiurile α1,2 (care limitează pelicula de lubrifiant) şi de construcţia cuzinetului.Relaţia (4) poate fi scrisă şi sub forma
127
(6)de unde se poate exprima presiunea medie convenţională
.
(7)Cu ajutorul celor prezentate se pot trasa (prin metode numerice) diagrame de
variaţie a presiunii pe periferia fusului; diagrama influenţei presiunii medii asupra variaţiei presiunii pe periferia fusului este prezentată în figura 2.
Fig. 2
3. Prezentarea dispozitivului
Studiul variaţiei presiunii în pelicula de lubrifiant formată pe periferia fusului radial uns hidrodinamic, se poate face cu ajutorul instalaţiei experimentale a cărei principiu de funcţionare este prezentat în figura 3.
Fusul de capăt F şi cuzinetul C formează lagărul cu ungere hidrodinamică (pentru care se determină variaţia presiunii pe periferia fusului); motorul electric ME antrenează fusul prin intermediul arborelui A; angrenajul elicoidal melc – roată cilindrică MR asigură rotirea subansamblului cuzinetului C împreună cu manometrul M.
Forţa F care solicită radial lagărul rămâne de mărime şi direcţie constante faţă de direcţia de măsurare a presiunii (direcţia manometrului); manometrul M este în legătură directă cu zona portantă a lagărului radial şi indică presiunea în diferite poziţii radiale, în cazul în care turaţia şi forţa de încărcare rămân invariabile.
Forţa F de încărcare a lagărului este măsurată cu ajutorul traductorului de forţă, de tip tensometric TF, semnalele electrice culese de la acesta fiind prelucrate de puntea tensometrică cu afişaj digita PT.
128
Viteza unghiulară a fusului poate fi modificată prin varierea tensiunii de alimentare a motorului de curent continuu şi este măsurată cu ajutorul traductorului incremental de turaţie TI, impulsurile generate de acest traductor fiind contorizate de numărătorul universal NU.
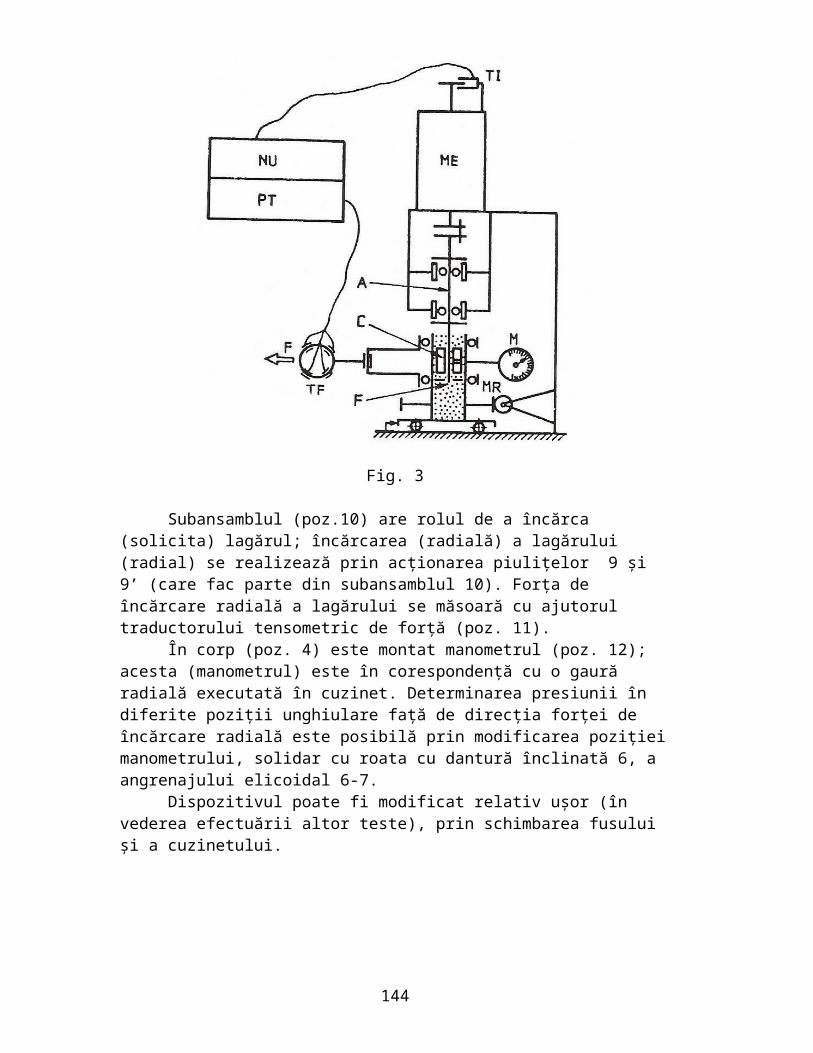
Dispozitivul (fig. 4) este compus din arborele motorului (poz. 1) care antrenează (printr-o asamblare cu pană) arborele (poz. 2), pe care este fixat fusul (poz. 3), care se roteşte în raport cu cuzinetul (poz. 5), montat în corp (poz. 4). Centrarea cuzinetului pe fus (fără introducerea de forţe suplimentare la montaj) se face printr-un rulment axial (poz. 8 ; mai are şi rolul de a susţine subansamblul cuzinetului).
Fig. 3
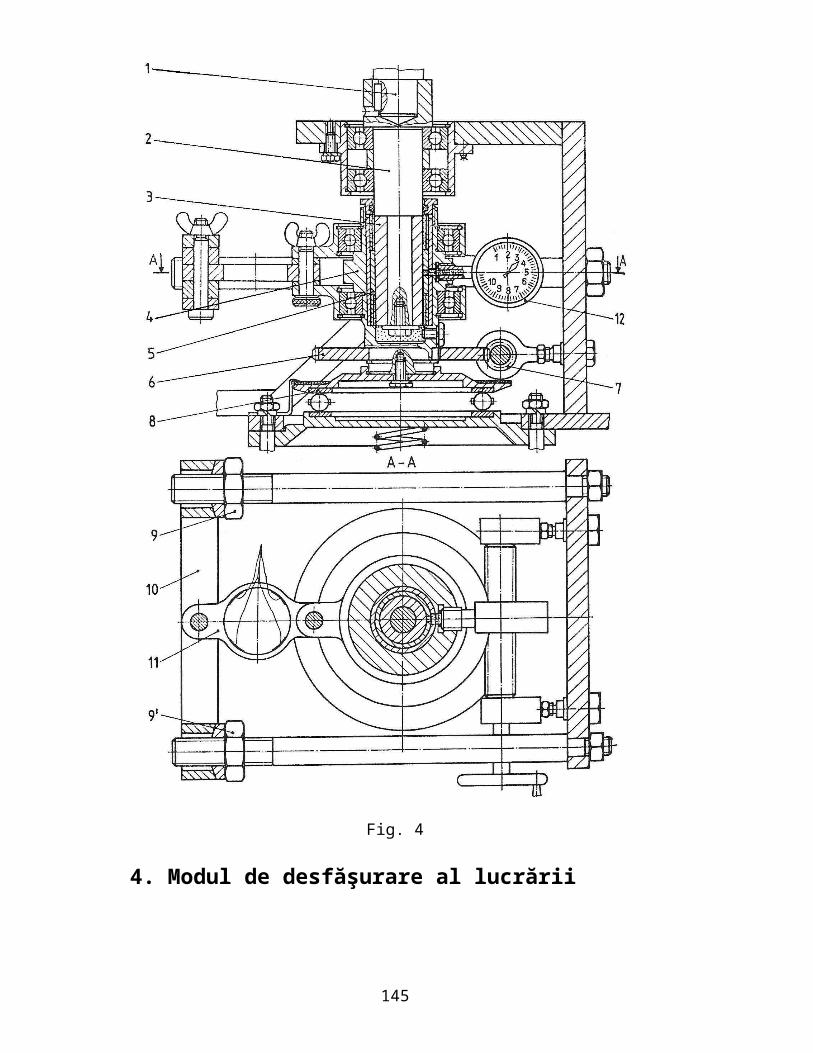
Subansamblul (poz.10) are rolul de a încărca (solicita) lagărul; încărcarea (radială) a lagărului (radial) se realizează prin acţionarea piuliţelor 9 şi 9’ (care fac parte din subansamblul 10). Forţa de încărcare radială a lagărului se măsoară cu ajutorul traductorului tensometric de forţă (poz. 11).
În corp (poz. 4) este montat manometrul (poz. 12); acesta (manometrul) este în corespondenţă cu o gaură radială executată în cuzinet. Determinarea presiunii în diferite poziţii unghiulare faţă de direcţia forţei de încărcare radială este posibilă prin modificarea poziţiei manometrului, solidar cu roata cu dantură înclinată 6, a angrenajului elicoidal 6-7.
Dispozitivul poate fi modificat relativ uşor (în vederea efectuării altor teste), prin schimbarea fusului şi a cuzinetului.
129

Fig. 4
4. Modul de desfăşurare al lucrării
Desfăşurarea lucrării impune parcurgerea următoarelor etape: - verificarea instalaţiei, în general şi a aparatelor în mod special; - cuplarea motorului electric (se aşteaptă stabilizarea mişcării);
130
- poziţionarea manometrului într-o poziţie perpendiculară pe direcţia forţei de încărcare; - încărcarea sistemului cu forţa necesară; - rotirea manometrului, succesiv, în poziţii radiale diferite, din zona portantă, citindu-se valoarea unghiului şi a presiunii (după stabilirea acesteia); - repetarea operaţiilor, pentru diferite forţe de încărcare şi turaţii ale fusului. Forţa F care încarcă lagărul se determină cu relaţia (8)
unde: k este constanta traductorului cu caracteristică liniară TF; constanta traductorului k (marcată pe acesta) depinde de mărimea traductorului (mărimea este impusă de dimensiunile lagărului supus testelor); N reprezintă valoarea indicată de puntea tensometrică.
Caracteristicile lagărului suspus încercării, sunt :- lagăr radial, cu cuzinet complet având diametrul , lungimea
fusului , jocul relativ , materialul fusului OLC 45, materialul cuzinetului CuSn 15; - lubrifiantului folosit – ulei mineral;
- domeniul de turaţii
- domeniul forţei de încărcare
Rezultatele măsurătorilor succesive ale presiunilor din diverse secţiuni radiale, pentru fiecare turaţie şi sarcină, se notează în tabelul 1. Tabelul 1
Nr.crtF,N
n, αo
p ,MPa
5. Modul de elaborare al referatului lucrării de laborator
Referatul lucrării de laborator trebuie să cuprindă :- titlul lucrării;- scopul lucrării;- schema de principiu a instalaţiei (fig. 3), cu indicarea părţilor componente şi a funcţionării acesteia;- principalele etape necesare pentru efectuarea lucrării;- rezultatele măsurătorilor vor fi înregistrate în tabelul 1; se vor realiza măsurători, pentru diferite dimensiuni de fusuri (minim două), la forţe de încărcare şi turaţii diferite (minim trei variante pentru fiecare dimensiune de fus);- înregistrările din tabelul 1 vor fi sintetizate în grafice (conform figurii 2);- se consemnează rezultatele analizei diagramelor obţinute, evidenţiindu-se influenţa încărcării lagărului şi a turaţiei fusului asupra variaţiei presiunii în filmul de lubrifiant;- concluziile rezultate din interpretarea datelor experimentale.
131
Organe de maşini – Îndrumar pentru lucrări de laborator
LUCRAREA DE LABORATOR NR. 18
DETERMINAREA MOMETULUI DE FRECARE ÎNTR-UN LAGĂR CU ROSTOGOLIRE
1. Scopul lucrării
Lucrarea de laborator are ca scop determinarea momentului de frecare în rulmenţii radiali cu bile, la funcţionarea în gol (nesolicitaţi); rulmenţii utilizaţi sunt realizaţi în variante constructive diferite: neetanşaţi, etanşaţi pe o parte sau pe ambele părţi.
2. Noţiuni teoretice
Momentele de frecare mediu şi maxim sunt elementele ce caracterizează pierderile prin frecare în rulmenţii radiali. Momentul de frecare mediu (cel care se determină în calculul lucrării de laborator) se determină ca medie aritmetică a valorilor momentelor de frecare, obţinute la un număr de încercări (este specific rulmenţilor care funcţionează la turaţii mari); cea mai mare valoare obţinută la măsurare reprezintă momentul maxim de frecare (se determină la rulmenţii a căror turaţie se apropie de zero sau care execută deplasări unghiulare reduse-rulmenţi nerotitori) [28].
Frecarea în rulmenţii radiali cu bile cu turaţii mai mari de10 rot/min, cuprinde:- frecarea bilelor de canalul inelelor: pierderi datorate impreciziei
tehnologice; frecarea datorată alunecărilor pe suprafaţa de contact (frecările de rostogolire şi alunecare);
- frecarea în lubrifiant: frecarea în lubrifiantul de pe suprafaţa de contact; frecarea în lubrifiantul care umple locaşul coliviei; frecarea în elementele înconjurătoare ale rulmentului (gazului, lichidului sau a unui alt mediu, inclusiv învingerea rezistenţei jetului de ungere);
- frecarea în colivie: frecarea în locaşurile coliviei; frecarea de umerii de ghidare ai inelelor. Momentul de frecare dinamic (momentul de frecare maxim sau mediu) reprezintă suma tuturor pierderilor prin frecare (prezentate anterior) şi poate fi folosit la selectarea rulmenţilor în clase sau grupe.
132

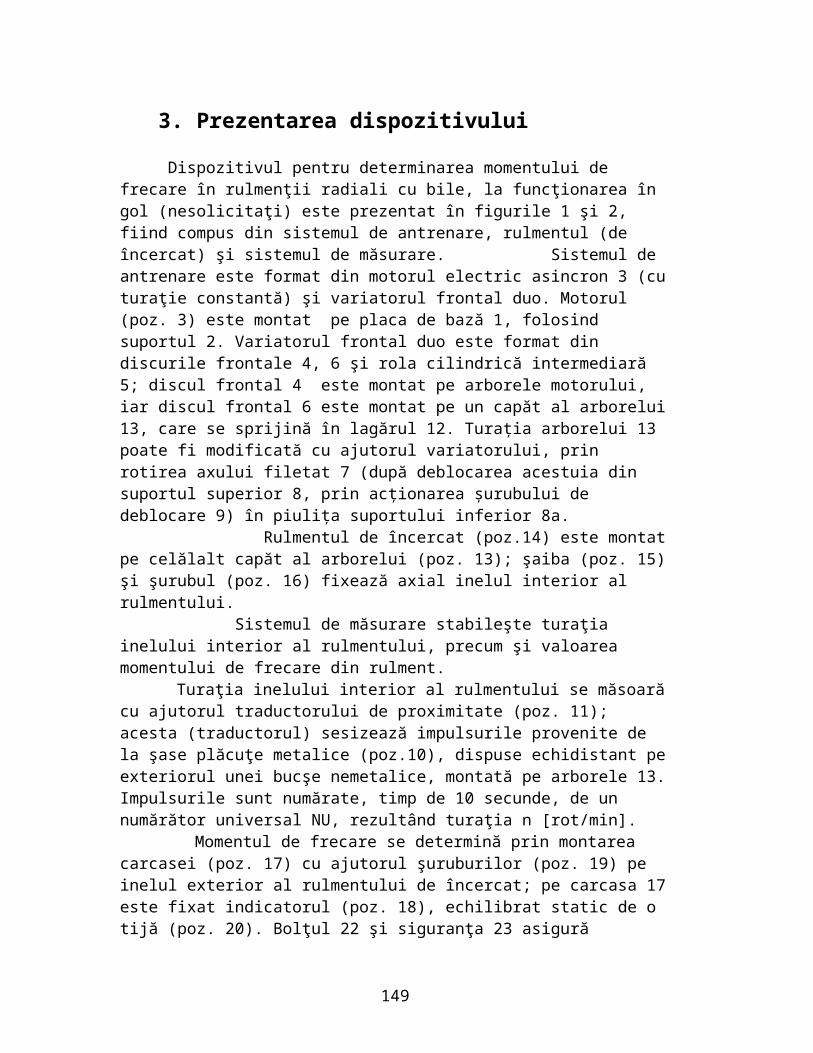
3. Prezentarea dispozitivului
Dispozitivul pentru determinarea momentului de frecare în rulmenţii radiali cu bile, la funcţionarea în gol (nesolicitaţi) este prezentat în figurile 1 şi 2, fiind compus din sistemul de antrenare, rulmentul (de încercat) şi sistemul de măsurare.
Sistemul de antrenare este format din motorul electric asincron 3 (cu turaţie constantă) şi variatorul frontal duo. Motorul (poz. 3) este montat pe placa de bază 1, folosind suportul 2. Variatorul frontal duo este format din discurile frontale 4, 6 şi rola cilindrică intermediară 5; discul frontal 4 este montat pe arborele motorului, iar discul frontal 6 este montat pe un capăt al arborelui 13, care se sprijină în lagărul 12. Turaţia arborelui 13 poate fi modificată cu ajutorul variatorului, prin rotirea axului filetat 7 (după deblocarea acestuia din suportul superior 8, prin acţionarea şurubului de deblocare 9) în piuliţa suportului inferior 8a.
Rulmentul de încercat (poz.14) este montat pe celălalt capăt al arborelui (poz. 13); şaiba (poz. 15) şi şurubul (poz. 16) fixează axial inelul interior al rulmentului. Sistemul de măsurare stabileşte turaţia inelului interior al rulmentului, precum şi valoarea momentului de frecare din rulment.
Turaţia inelului interior al rulmentului se măsoară cu ajutorul traductorului de proximitate (poz. 11); acesta (traductorul) sesizează impulsurile provenite de la şase plăcuţe metalice (poz.10), dispuse echidistant pe exteriorul unei bucşe nemetalice, montată pe arborele 13. Impulsurile sunt numărate, timp de 10 secunde, de un numărător universal NU, rezultând turaţia n [rot/min].
Momentul de frecare se determină prin montarea carcasei (poz. 17) cu ajutorul şuruburilor (poz. 19) pe inelul exterior al rulmentului de încercat; pe carcasa 17 este fixat indicatorul (poz. 18), echilibrat static de o tijă (poz. 20). Bolţul 22 şi siguranţa 23 asigură articularea tijei 21 pe tija 20; pe tija (poz. 21) este montată o greutate (poz. 24) şi un amortizor de oscilaţii (poz. 25), care funcţionează în bazinul (poz. 26) umplut cu ulei. De lagărul 12, este fixat sectorul gradat 27. Inelul interior al rulmentului (poz. 14) este antrenat în mişcare prin intermediul variatorului frontal duo, de motorul electric (poz. 3). Momentul de frecare din rulment roteşte inelul exterior (al rulmentului) şi carcasa 17 (montată pe inel) împreună cu acul indicator 18. Pentru o turaţie dată, la momentul , carcasa se va roti cu un unghi , dependent de momentul de frecare, precum şi de greutatea amortizorului 25, cumulată cu greutăţile 24, 21 şi de mărimea braţului L.
Notând cu greutatea ansamblului amortizor (poziţiile 21, 24, 25) şi cu
greutatea lichidului (uleiului) dislocuit, se poate stabili momentul de frecare
, (1)
unde se poate neglija , care este foarte mic, rezultând
, (2) în care este un moment de frecare la turaţie reglată (modificând turaţia arborelui 13, acul indicator va prezenta un nou unghi ).
133
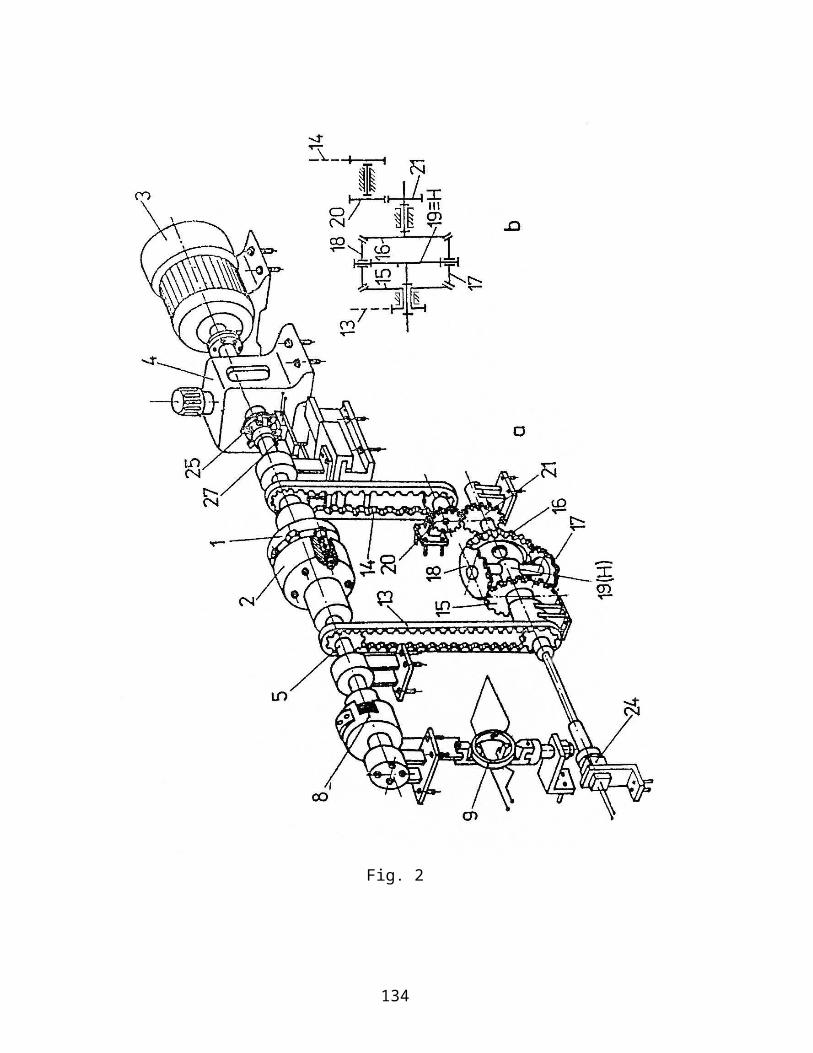
Fig. 1
134

Fig. 2
4. Modul de desfăşurare al lucrării
Pentru determinarea momentului de frecare din rulmenţii radial cu bile, la funcţionarea în gol, se parcurg următoarele etape:
- se montează rulmentul de încercat (poz. 14) pe capătul arborelui 13 şi se fixează inelul interior al acestuia prin şaiba 15 şi şurubul 16;
- pe inelul exterior al rulmentului se montează carcasa 17 cu ajutorul şuruburilor 19;
- se montează, prin intermediul tijei 20 şi a bolţului 22, amortizorul 25, greutatea 24 şi tija 21, asigurându-se cu siguranţa 23;
- după pornirea motorului electric 3 se notează turaţia n şi valoarea unghiului (citirea se va face numai după stabilirea turaţiei, indicată de numărătorul NU);
- se măreşte turaţia arborelui 13, prin acţionarea roţii de manevră a axului 7, iar după stabilizarea turaţiei, se notează valorile n şi ; se repetă această operaţie de mai multe ori.
Rulmenţii testaţi sunt radiali cu bile (din serie 62, neetanşaţi şi etanşaţi pe o parte sau ambele părţi), având diametrele interioare de 20mm , 30mm şi
40mm. În tabelul 1 se notează rezultatele testelor efectuate similar pentru toate tipodimensiunile de rulmenţii.
În tabelul 2 se notează rezultatele testelor efectuate pentru unul din rulmenţi (de preferat un rulment etanş pe ambele părţi) rotit cu o turaţie constantă; se notează valoarea unghiului , la intervale de timp stabilite.
135
Tabe
lul 1
L=105mm; G=1N.
Tipulrulmen-tului
Turaţia n, rot/minParametrul
Tabelul 2
L=105mm; G=1N.
Tipulrulmen-tului
Turaţia t, min Parametrul
6. Modul de elaborare al referatului lucrării de laborator
Referatul lucrării de laborator trebuie să cuprindă: - titlul lucrării; - scopul lucrării; - definirea momentului de frecare; - schema dispozitivului (fig. 2), cu indicarea părţilor componente ale acestuia; - etapele necesare pentru efectuarea lucrării; - tabelele 1 şi 2;
136
- cu datele din tabelele 1 şi 2 se va trasa (se va indica simbolul rulmenţilor testaţi): diagrama de variaţie a momentului de frecare mediu, în funcţie de turaţia inelului interior al rulmenţilor testaţi ; diagrama momentului de frecare
mediu, în funcţie de timp,
- după trasarea diagramelor şi analiza acestora, se trag concluzii privind: mărimea momentului de frecare; domeniile de turaţii avantajoase, precum şi interpretarea unor variaţii ale momentului de frecare în rulmenţi.
137
Organe de maşini – Îndrumar pentru lucrări de laborator
LUCRAREA DE LABORATOR NR. 19
STUDIUL PIERDERILOR PRIN FRECARE ÎN ETANŞĂRILE CU MANŞETĂ DE ROTAŢIE
1. Scopul lucrării
Lucrarea de laborator are drept scop determinarea experimentală a pierderilor prin frecare în etanşările cu manşetă de rotaţie. În cadrul testelor se vor folosi arbori rotitori cu diferite rugozităţi în zona de contact şi diferite moduri de ungere. De asemenea, dispozitivul permite efectuarea unor teste în cazul manşetei de rotaţie montată cu excentricitate.
2. Noţiuni teoretice
Etanşările sunt organe de maşini sau ansambluri de piese folosite pentru asigurarea etanşeităţii asamblărilor fixe sau mobile şi a subansamblelor maşinilor şi mecanismelor, în vederea funcţionării acestora în condiţii optime.
Prin etanşare se urmăreşte [27]:-închiderea ermetică a unui spaţiu conţinând un mediu sub presiune;-separarea a două sau mai multor spaţii cu medii aflate sub presiuni diferite;-protecţia etanşă a unor spaţii conţinând lubrifianţi, împotriva scurgerilor
şi/sau împotriva pătrunderii unor corpuri străine din exterior.Etanşările cu manşetă de rotaţie se folosesc când se impun condiţii severe de
etanşare, folosindu-se pentru viteze periferice de până la 10 şi temperaturi cuprinse
între C.
Manşetele de rotaţie au două forme constructive: forma A (fig. 1, a) şi forma B (fig. 1, b).
138
În figura 2 sunt prezentate două exemple de folosire a manşetelor de rotaţie: împotriva scurgerii lubrifiantului (fig. 2, a) şi împotriva pătrunderii impurităţilor din exterior (fig. 2, b).
Fig. 1
Fig. 2
3. Prezentarea dispozitivului
Dispozitivul folosit pentru studiul pierderilor prin frecare în etanşările cu manşetă de rotaţie (fig. 3, 4 şi 5) se compune din motorul electric 1, care antrenează prin cuplajul 2, arborele 4, rezemat în lagărul 3. Pe arborele 4 este montat rulmentul radial cu bile 5 care susţine carcasa 6 (carcasa 6 se poate roti în jurul propriei axe). În carcasa 6 este montată patina 7, a cărei poziţie faţă de axa arborelui 4 se obţine cu ajutorul excentricului 25, fixat (în poziţia dorită) prin piuliţa 26. Manşeta de rotaţie 8 (supusă testelor), se montează şi se solidarizează prin flanşa 9, în patina 7. Arborele 11 se reazemă şi este antrenat în mişcare de arborele 4 prin intermediul unui ştift 14, care poate culisa în canalul (longitudinal) practicat în arborele tubular 4. Arborele 11 este rezemat, în celălalt capăt, în lagărul 15, prin intermediul unei bucşe 17 şi a rulmenţilor radiali cu bile 16. Indexorul 18, menţinut în poziţia indexată de arcul 19,
139

are rolul de a poziţiona arborele 11, faţă de manşeta de rotaţie 8. Pe arborele 11 se montează bucşa cu rugozităţi etalon 10, fixată radial prin ştiftul 12 şi axial prin inelul 13. De carcasa 6 se fixează indicatorul 23 şi greutatea 22, prin bolţul 21 şi tija 20. De lagărul 3 este fixat sectorul gradat 24.
140
F
ig. 3
141
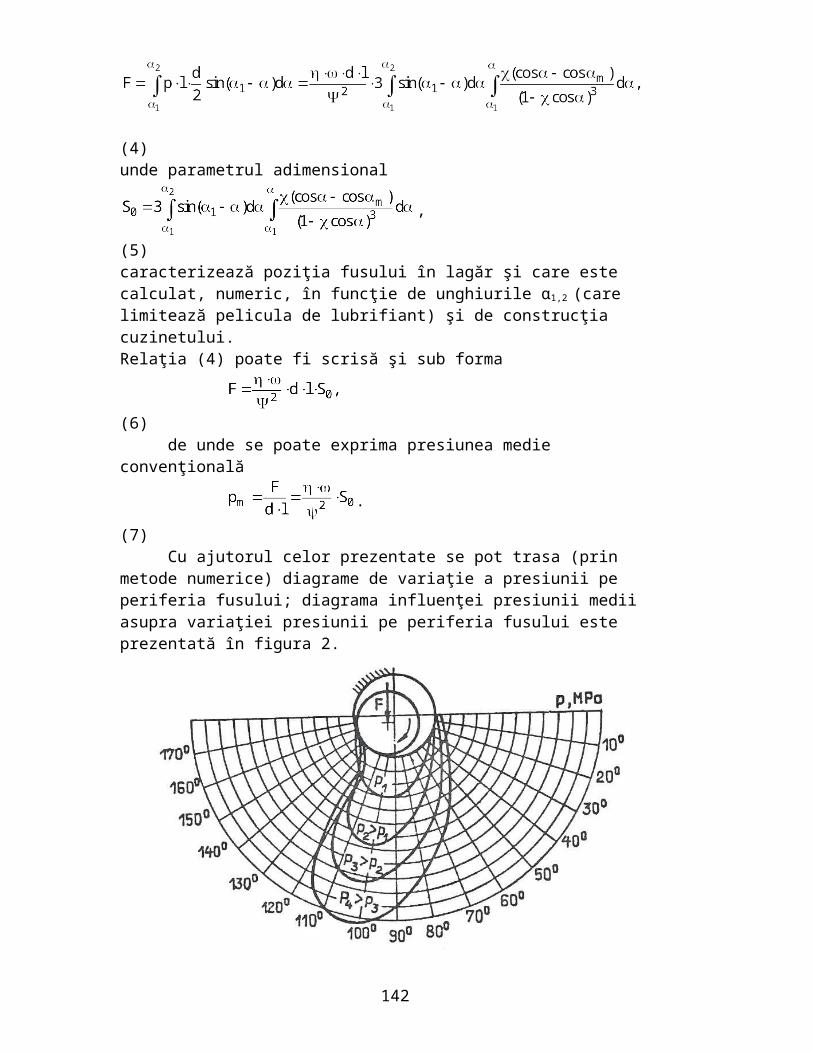
Fig. 4
142
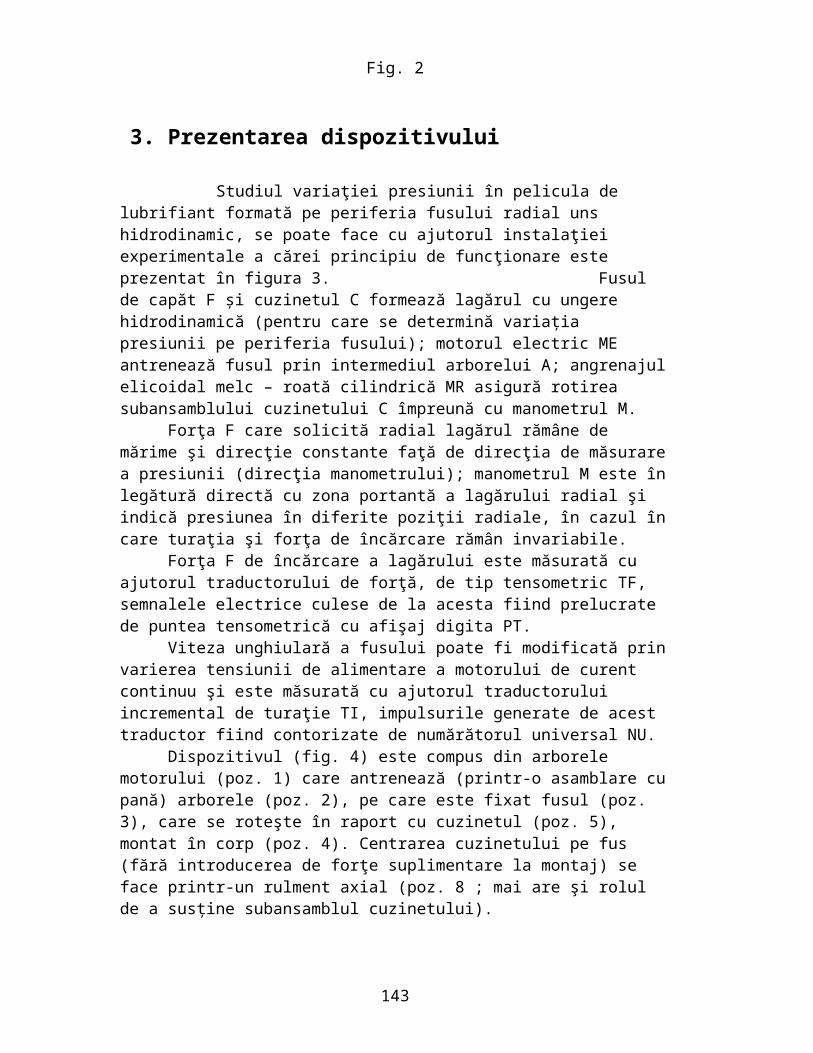
Fig. 5
4. Modul de desfăşurare al lucrării
Studiul pierderilor prin frecare în etanşările cu manşetă de rotaţie constă în determinarea momentului de frecare (în manşeta de rotaţie), în funcţie de rugozitatea arborelui (bucşa 10 – fig. 6), pentru diferite moduri de ungere (fără ungere, ungere cu unsoare consistentă, ungere cu ulei) şi pentru excentricităţile de montaj cuprinse în intervalul e = (0….0,75)mm.
Dispozitivul permite măsurarea momentului de frecare din rulment şi
momentul de frecare total (în manşeta de rotaţie 8 şi rulmentul 5).
Pentru determinarea momentului de frecare ( ) din rulmetul 5 se va retrage arborele 11 din asamblarea cu arborele tubular 4, astfel ca ştiftul 14 să nu mai antreneze arborele 11, iar manşeta de rotaţie 8 să nu mai fie în contact cu bucşa 10. Astfel, motorul electric 1 va antrena numai inelul interior al rulmentului 5 care va tinde să rotească inelul exterior (al rulmentului 5) şi odată cu el şi carcasa 6, cu acul
indicator 23. Carcasa 6 se va roti cu un unghi , dependent de mometul de frecare,
de greutatea 22 şi de mărimea braţului L.Momentul de frecare este dat de relaţia
. (1)
Pentru determinarea momentului de frecare total , se opreşte motorul
electric 1, se introduce arborele 11 în arborele tubular 4, astfel ca ştiftul 14 să pătrundă în canalul de pană, solidarizând (în mişcarea de rotaţie), cei doi arbori. În dreptul manşetei de rotaţie 8, se aduce zona dorită a bucşei 10. La pornirea
dispozitivului, carcasa 6 şi indicatorul 23 se vor roti cu un unghi , iar momentul de
frecare total va fi dat de relaţia
143
. (2)
Fig. 6
Efectuând diferenţa dintre momentul total de frecare şi momentul de
frecare în rulment , se obţine momentul de frecare în etanşarea cu manşeta de
roataţie
. (3)
Pentru efectuarea lucrării de laborator se vor parcurge următoarele etape:- se retrage arborele 11 din asamblarea cu arborele 4, în vederea decuplării;- se anulează excentricitea patinei 7, faţă de carcasa 6, e = 0 (se acţionează
excentricul 25, după deşurubarea piuliţei 26);- se realizează modul de ungere dorit, între bucşa 10 şi manşeta de rotaţie 8;- se porneşte motorul electric 1 şi se notează unghiul (al indicatorului 23),
în tabelul 1;- se opreşte motorul electric şi se cuplează arborele 11 cu arborele 4, stabilind
(cu ajutorul indexorului 18), zona cu rugozitatea dorită a bucşei 10, care să vină în contact cu manşeta de rotaţie;
- pentru fiecare zonă de contact se porneşte şi se opreşte motorul electric, măsurând unghiul , care se notează în tabelul 1;
- pentru fiecare determinare se calculează momentul de frecare din etanşare
;
- pentru o rugozitate aleasă (pentru care s-a făcut testarea), se va dezaxa patina 7, în carcasa 6, cu ajutorul excentricului 25, notându-se excentricitatea e;
- se porneşte motorul electric şi se citeşte unghiul , care se înscrie în
tabelul 2 (valoarea unghiului fiind cea determinată anterior);
144
- se calculează momentul de frecare în etanşare (pentru acest ultim caz)
şi se notează în tabelul 2, după care se va stabili creşterea momentului de frecare
.
Tabelul 1
Felul ungerii
Rugozitate Paramentrul
Ra 0,8
Ra 1,6
Ra 3,2
Ra 6,3
fără ungere
ungere cu unsoareconsistentă
ungere cu ulei
L = 100mm ; G = 65 N ; e = 0
]
Tabelul 2 L = 100 mm ; G = 65 N ; e = mm
Felul ungerii Rugozitatea Parametrul
Creşterea momentului de frecare
145
5. Modul de elaborare al referatului lucrării de laborator
Referatul lucrării de laborator trebuie să cuprindă: - titlul lucrării; - scopul lucrării; - desenele manşetelor de rotaţie în formele constructive A şi B (fig. 1); - schema dispozitivului (fig. 5), cu indicarea părţilor componente ale acestuia; - etapele parcurse pentru efectuarea lucrării de laborator; - desenul bucşei 10 (fig. 6);. - tabele 1 şi 2, completate cu datele obţinute în urma efectuării testelor;
- diagrama de variaţie a momentului de frecare , în funcţie de rugozitatea
arborelui (bucşa 10; se vor folosi datele cuprinse în tabelul 1);
- creşterea (în procente) a momentului de frecare ( se vor folosi datele din
tabelul 2); - concluziile rezultate din interpretarea datelor experimentale.
146
Organe de maşini – Îndrumar pentru lucrări de laborator
LUCRAREA DE LABORATOR NR. 20
STUDIUL CUPLAJULUI CARDANIC
1. Scopul lucrării
Lucrarea de laborator are ca scop studierea unui cuplaj cardanic prin identificarea mişcării elementelor cinematice componente, determinarea gradului de mobiliate şi analiza cinematică.
2. Noţiuni teoretice
Cuplajele compensatoare pentru deplasări unghiulare, cunoscute şi sub denumirea de cuplaje cardanice, sunt utilizate pentru transmiterea mişcării de rotaţie între doi arbori a căror axe geometrice sunt concurente. Ele se folosesc în transmisiile autovehiculelor, pentru maşini-unelte, utilaje de ridicat etc.
Un cuplaj cardanic (fig. 1) se compune dintr-un arbore conducător 1, arbore condus 2, element intermediar 3 (crucea cardanică), furca conducătoare 4 şi furca condusă 5.
Fig. 1, a
147

Fig. 1, b
Arborele conducător 1 are o viteză unghiulară constantă , iar crucea
cardanică 3, va avea o mişcare oscilatorie periodică astfel încât viteza unghiulară a arborelui 2, va varia între valorile maxime şi minime, de două ori în timpul fiecărei rotaţii.
Deoarece arborele conducător se roteşte cu o viteză unghiulară constantă şi punctele A, A’ (fig. 2- în care elementele au aceleaşi semnificaţii ca în fig. 1; 2 este arborele intermediar –condus, conducător; este arborele condus al celui de-al doilea cuplaj cardanic; sunt furcile de pe arborii conducător, respectiv condus ai celui de-al doilea cuplaj cardanic), de pe furca montată pe acest arbore, se vor roti cu o viteză unghiulară constantă. Viteza punctelor B, B’ de pe furca arborelui condus va fi
, (1)
unde este unghiul dintre axele celor doi arbori.
Fig. 2
148
După o rotaţie de , viteza punctelor B, B’ va fi
, (2)
de unde, făcând raportul vitezelor se obţine
. (3)
Cuplajul cardanic fiind un mecanism asincron, legătura dintre vitezele unghiulare ale elementelor conducător şi condus este în funcţie de unghiul de rotire
al elementului conducător şi de unghiul dintre axele celor doi arbori.
Asincronismul este pus în evidenţă de raportul de transmitere ( ), prin relaţia
, (4)
având valorile extreme
, (5)
pentru şi
, ( )
pentru .
Legea de variaţie a momentului de torsiune la arborele condus, pentru un
moment la arborele conducător şi unghiul dintre axele arborilor
, este de forma
, (6)
având valoarea maximă
, (7)
pentru şi valoarea minimă
, ( )
pentru .
Transmisiile bicardanice (fig. 3, în care 1 reprezintă o asamblare prin caneluri), sunt compuse din două cuplaje cardanice şi un arbore intermediar. Pentru a funcţiona, această transmisie trebuie să aibă axele furcilor de pe arborele intermediar,
paralele, iar unghiul dintre axele arborelui conducător şi cel intermediar să fie egal
cu unghiul dintre axele arborelui intermediar şi cel condus. Transmisiile
bicardanice se folosesc pentru a elimina asincronismul (se obţine sincronismul) [23].
149
Fig. 3
3. Prezentarea dispozitivului
Dispozitivul (fig. 4) este compus din următoarele elemente: arborele conducător 1; arborele condus 2; crucea cardanică 3; furca arborelui conducător 4; furca arborelui condus 5; cadranul 6 divizat în grade (lipit de suportul fix).
Fig. 4
Axele arborilor 1 şi 2 sunt concurente în centrul crucii cardanice 3 (este un mecanism de tip sferic). Unghiul dintre axele celor doi arbori (conducător şi condus) este reglabil. Pe arborii conducător şi condus sunt montate ace indicatoare care se rotesc în dreptul unor cadrane. Manivela montată pe arborele 1, pune în mişcare mecanismul.
Pentru a vizualiza funcţionarea unui cuplaj cardanic în condiţii cât mai apropiate de realitate, se va folosi un dispozitiv (fig. 5) compus din: motor electric 1, cuplaj 2, lagăr 3, cuplaj cardanic 4, lagăr mobil 5 şi placa de bază 6.
150
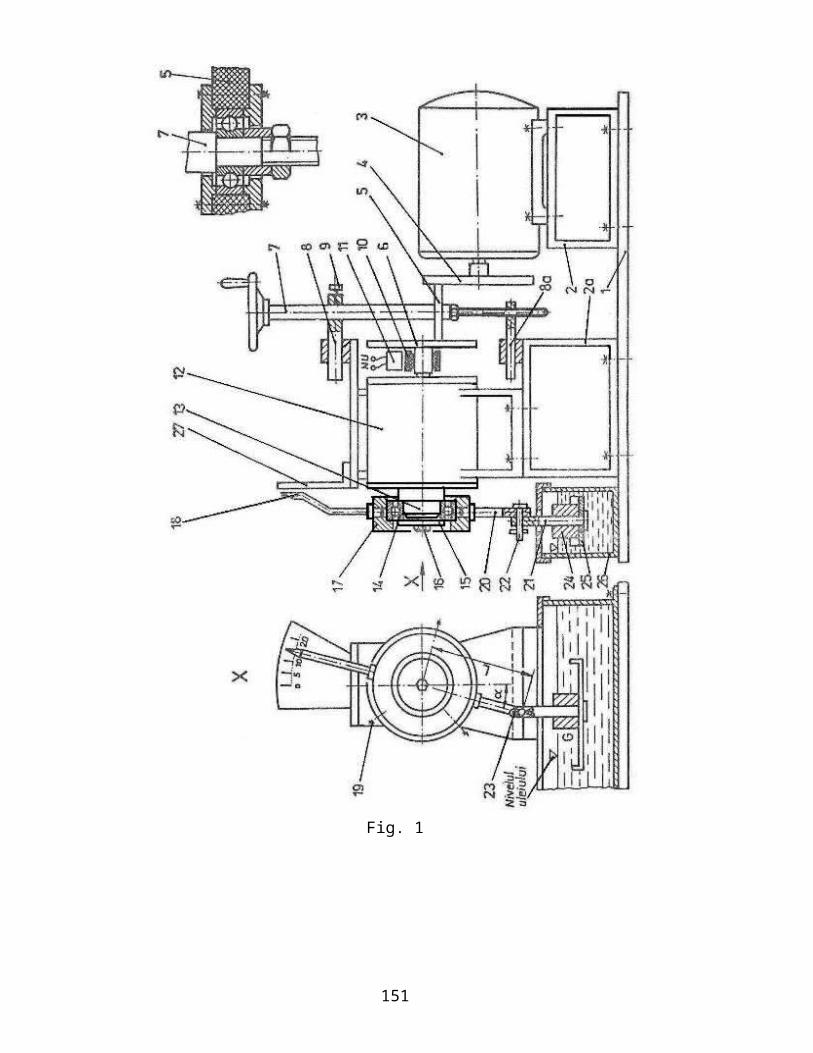
Fig. 5
4. Modul de desfăşurare al lucrării
Identificarea mişcării elementelor cinematice se face prin acţionarea manivelei solidară cu arborele condicător 1. Mişcarea de rotaţie se transmite arborelui condus 2, prin intermediul crucii cardanice 3 care execută o mişcare de rotaţie sferică cu centrul în 0, punctul de intersecţie al axelor celor doi arbori. Din schema cinematică se observă că punctele A, A’ şi B, B’ descriu cercuri situate în plane perpendiculare pe axele arborilor 1 şi 2. Cercurile cu diametrele AA’ şi BB’ (AA’ = BB’) se află pe sfera cu centrul în punctul 0 (fig. 6).
Fig. 6
Trebuie observat că pentru fiecare poziţie a arborelui conducător 1 corespunde o poziţie bine determinată a arborelui condus 2, de unde se poate spune că gradul de mobilitate al mecanismului este unu, fapt verificat şi de relaţia
. (8)Analiza cinematică stabileşte legea de mişcare a arborelui condus 2 în funcţie
de mişcarea arborelui conducător 1, pentru o anumită valoare a unghiului .Se va completa tabelul 1, pentru trei valori ale unghiului (
). Se va roti arborele conducător 1 cu un unghi şi
151

considerând un pas al citirilor, se urmăresc valorile corespunzătoare
ale unghiurilor de rotire ale arborelui condus .
Tabelul 1Poziţia 1 2 3 4 5 36
Cu ajutorul datelor din tabelul 1 se vor trasa trei grafice (pentru cele 3 valori ale lui ), ale funcţiei .
Folosind datele experimentale (din tabelul 1), se va verifica relaţia
. (9)
5. Modul de elaborare al referatului lucrării de laborator
Referatul lucrării de laborator trebuie să cuprindă: - titlul lucrării; - scopul lucrării; - elementele unui cuplaj cardanic (fig. 1); - schema dispozitivului (fig. 4), cu indicarea părţilor componente; - tabelul 1, completat cu datele obţinute în urma efectuării experienţelor; - diagramele de variaţie ale unghiului în funcţie de unghiul ; - concluziile rezultate din interpretarea datelor experimentale.
152


















