elemente de mecanica şi fizica contactului corpurilor solide
22
219 9 . ELEMENTE DE MECANICA ŞI FIZICA CONTACTULUI CORPURILOR SOLIDE 9.1. Noţiuni de bază, definiţii Problema contactului mecanic constituie o preocupare importantă în practica inginerească. Marea majoritate a maşinilor, instalaţiilor, structurilor mecanice etc, sunt realizate din mai multe componente care sunt “legate” între ele, adică sunt în contact. Condiţiile în care se realizează contactul sunt foarte diferite, de la caz la caz. De exemplu, pentru batiuri, fundaţii, stâlpi de susţinere etc, contactul se face fără apariţia unor deplasări relative. În cazul sistemelor în mişcare situaţia este cu totul alta, deoarece corpurile au contact cu altele, care sunt fie fixe, fie se mişcă şi ele, după o altă traiectorie. Acest tip de contact duce la uzura şi reducerea treptată a performanţelor sistemului respectiv, sau chiar la scoaterea lui din folosinţă. Uzura componentelor este motivul principal pentru care sistemele mecanice se defectează şi trebuie înlocuite. Două sau mai multe domenii distincte (corpuri solide) se spune că sunt în contact dacă există o suprafaţă comună care le separă şi nu există transfer material de la un corp la altul. Contactul între corpuri presupune îndeplinirea unei condiţii cinematice, adică viteza relativă pe direcţia normalei la suprafeţele de contact este nulă şi a unei condiţii dinamice, de continuitate a tensiunilor la traversarea suprafeţei de contact (principiul acţiunii şi reacţiunii). Contactul este un fenomen complex, nelinear, deoarece depinde atât de proprietăţile elastice ale corpurilor care vin în contact, de geometria lor, de condiţiile de rezemare etc dar şi de evoluţia încărcărilor, adică starea finală a unei suprafeţe de contact depinde de felul în care sunt aplicate sarcinile. De asemenea în timpul aplicării sarcinilor se modifică (uneori fundamental), formele şi dimensiunile suprafeţelor de contact, precum şi distribuţiile tensiunilor pe aceste suprafeţe.
Transcript of elemente de mecanica şi fizica contactului corpurilor solide
219
9 .
ELEMENTE DE MECANICA ŞI FIZICA
CONTACTULUI CORPURILOR SOLIDE
9.1. Noţiuni de bază, definiţii
Problema contactului mecanic constituie o preocupare
importantă în practica inginerească. Marea majoritate a maşinilor,
instalaţiilor, structurilor mecanice etc, sunt realizate din mai multe
componente care sunt “legate” între ele, adică sunt în contact.
Condiţiile în care se realizează contactul sunt foarte diferite, de la caz
la caz. De exemplu, pentru batiuri, fundaţii, stâlpi de susţinere etc,
contactul se face fără apariţia unor deplasări relative. În cazul
sistemelor în mişcare situaţia este cu totul alta, deoarece corpurile au
contact cu altele, care sunt fie fixe, fie se mişcă şi ele, după o altă
traiectorie. Acest tip de contact duce la uzura şi reducerea treptată a
performanţelor sistemului respectiv, sau chiar la scoaterea lui din
folosinţă. Uzura componentelor este motivul principal pentru care
sistemele mecanice se defectează şi trebuie înlocuite.
Două sau mai multe domenii distincte (corpuri solide) se spune
că sunt în contact dacă există o suprafaţă comună care le separă şi nu
există transfer material de la un corp la altul. Contactul între corpuri
presupune îndeplinirea unei condiţii cinematice, adică viteza relativă
pe direcţia normalei la suprafeţele de contact este nulă şi a unei
condiţii dinamice, de continuitate a tensiunilor la traversarea
suprafeţei de contact (principiul acţiunii şi reacţiunii).
Contactul este un fenomen complex, nelinear, deoarece depinde
atât de proprietăţile elastice ale corpurilor care vin în contact, de
geometria lor, de condiţiile de rezemare etc dar şi de evoluţia
încărcărilor, adică starea finală a unei suprafeţe de contact depinde de
felul în care sunt aplicate sarcinile. De asemenea în timpul aplicării
sarcinilor se modifică (uneori fundamental), formele şi dimensiunile
suprafeţelor de contact, precum şi distribuţiile tensiunilor pe aceste
suprafeţe.
220
Generic, contactul între două corpuri are loc într-un punct, de-a
lungul unei linii sau pe un plan. Această clasificare îşi are rădăcinile
în idealizările făcute la modelare. Dacă cele două corpuri sunt
sferice, de exemplu, se consideră contactul ca fiind punctiform.
Contactul a doi cilindri de-a lungul generatoarei comune, se spune că
este linear. La fel, contactul a doi dinţi aparţinând la două roţi dinţate
aflate în angrenare. În realitate, dat fiind că cele două corpuri se
deformează, contactul are loc întotdeauna pe o suprafaţă, fie ea şi
foarte mică.
Contactul este menţinut de forţele care se transmit între cele două
corpuri. Aceste forţe se pot descompune pe direcţie perpendiculară
pe suprafaţa de contact şi pe direcţii paralele cu această suprafaţă.
Forţele normale produc o presiune de contact, iar cele tangenţiale
tind să ducă la alunecarea relativă a corpurilor. La limită, când
alunecarea începe, între componenta normală a forţei, P, şi cea
tangenţială (pe direcţia de alunecare), F, există relaţia F = P, unde
este coeficientul de frecare. Această lege a fost propusă cu patru
secole în urmă de către Amontov, iar frecarea de acest tip se
numeşte, prin jocul istoriei, frecare coulombiană. În treacăt fie spus,
atât timp cât corpul nu se mişcă, forţa de frecare nu este dată de
relaţia de mai sus, ea fiind, de fapt, nedefinită.
Cum forţele transmise de la un corp la celălalt sunt, de obicei,
considerabile şi cum, tot generic, suprafeţele de contact sunt mici,
presiunile de contact sunt foarte mari. Aceasta duce la tensiuni mari
în cele două corpuri în zona apropiată de suprafaţa de contact,
tensiuni care pot duce la curgere sau / şi la cedarea materialului.
Aceste tensiuni duc la ruperea de mici “aşchii” din material, deci la
uzură. Procesul are loc prin mai multe mecanisme, care se prezintă
sumar aici. Trebuie însă menţionat că el este de natură stohastică,
ceea ce a făcut ca până în prezent să nu existe o corelaţie clară între
modelele care determină câmpul de tensiuni din apropierea
contactului şi rata de uzură. Relaţiile care estimează uzura
componentelor de maşini, în condiţii date de încărcare, sunt total
empirice.
Chiar şi atunci când contactul are loc pe suprafeţe relativ mari,
de exemplu, în cazul ambreiajelor şi frânelor, tensiunile locale care
apar sunt tot foarte mari. Aceasta se datorează în principal faptului că
221
suprafaţa de contact este mare numai în aparenţă. În realitate, cele
două suprafeţe fiind rugoase, ele intră în contact numai pe o zonă
mică, acolo unde asperităţile se ating (şi se deformează). Suprafaţa
nominală de contact este, de fapt, suma acestor suprafeţe
microscopice de contact (ale asperităţilor) şi este mult mai mică decât
suprafaţa aparentă. Este interesant de observat, în acest context, că
valoarea forţei de frecare nu depinde de aria suprafeţei de contact, ci
de mărimea forţei totale transmisă prin contact. Observaţia este
interesantă, deoarece sugerează implicaţii referitoare la mecanismele
contactului, alunecării şi uzurii.
Clasificarea uzuală a tipurilor de contact se face din mai multe
puncte de vedere şi anume:
A. Din punctul de vedere al frecării dintre corpuri, există contact
fără frecare şi contact cu frecare. Contactul fără frecare este o
idealizare, care simplifică foarte mult abordarea teoretică a
fenomenului şi este aplicabil suprafeţelor bine lubrificate. Acest tip
de contact introduce doar o presiune normală la suprafeţele în
contact. Contactul cu frecare, propriu fenomenelor reale, introduce
pe lângă presiunea normală la suprafeţele de contact şi tensiuni
tangenţiale (sau forţe de frecare). Tensiunile tangenţiale, în general,
sunt într-o anumită relaţie cu tensiunile normale (presiunea de
contact) şi pot conduce la apariţia fenomenelor de aderenţă ("stick")
sau alunecare ("slip"). Contactul cu frecare, în general, ia în
considerare frecarea coulombiană şi este de tip elastic sau rigid.
Frecarea coulombiană elastică poate reprezenta fenomene de
aderenţă şi de alunecare, în timp ce frecarea coulombiană rigidă
modelează doar alunecarea.
B. Din punctul de vedere al modificării suprafeţei de contact la
aplicarea sarcinilor, există contactul conform şi contactul neconform.
Contactul conform se caracterizează prin faptul că suprafaţa iniţială
de contact (când nu este aplicată încărcarea), coincide cu suprafaţa
finală de contact (când este aplicată toată sarcina). Contactul
neconform, cel mai des întâlnit în realitate, nu respectă condiţiile
contactului conform. Astfel, spre exemplu, contactul iniţial punctual
între o bilă şi un plan rigid, se transformă într-o suprafaţă circulară,
în prezenţa unei forţe de apăsare, sau contactul iniţial pe o suprafaţă
dreptunghiulară, între o grindă simplu rezemată şi un corp
222
paralelipipedic rigid, se transformă în două suprafeţe dreptunghiulare
de suprafaţă totală mult mai mică.
C. Din punctul de vedere al comportării materialului, contactul
este elastic, atunci când comportarea materialului este linear elastică,
adică nu se depăşeşte limita de elasticitate şi elasto-plastic,
atunci când solicitarea materialului depăşeşte limita de elasticitate.
D. Din punctul de vedere al deplasării elementelor în contact,
există contact în domeniul deplasărilor mici, sau în domeniul
deplasărilor mari.
E. Teoria clasică a contactului este teoria lui Hertz. Aceasta se
bazează pe următoarele ipoteze:
a- suprafeţele care intră în contact sunt continue, netede (fără
rugozitate) şi fără frecare;
b- corpurile care mărginesc aceste suprafeţe sunt omogene,
izotrope şi ascultă de legea lui Hooke;
c- dimensiunile zonelor de contact (iniţial contactul este
punctiform sau linear), în prezenţa încărcărilor sunt mici, în
comparaţie cu dimensiunile corpurilor;
d- distribuţia tensiunilor în zona contactului se obţine din teoria
semispaţiului elastic a lui Boussinesq şi rezultă că tensiunile
tangenţiale în pata de contact sunt nule.
Acceptarea sau nu a teoriei lui Hertz, conduce la clasificarea
contactului în hertzian şi non-hertzian.
F. Funcţie de rigidităţile suprafeţelor care intră în contact, se
face clasificarea contactului de tip rigid-flexibil şi flexibil-flexibil.
Contactul rigid-flexibil se caracterizează prin faptul că una dintre
suprafeţele care intră în contact este mult mai rigidă decât cealaltă,
cum ar fi cazul contactului între matriţă şi piesa care se forjează.
Contactul flexibil-flexibil este propriu corpurilor care prezintă
rigidităţi comparabile.
Principalele aplicaţii ale analizei contactului se referă la
transmiterea eforturilor de la un corp la altul, pentru studiul
problemelor de uzură, de oboseală superficială, de durabilitate,
studiul problemei calităţii suprafeţelor, pentru determinarea
eforturilor de strângere la asamblările nituite, cu şuruburi, presate,
fretate etc.
223
Prezenţa contactului între piese este (sau poate fi) însoţită, în
general, de apariţia unor fenomene de transfer termic sau electric,
situaţii în care fenomenele mecanice se cuplează cu cele termice sau
electrice.
Clasificarea de mai sus se poate completa şi cu cea de contact
static şi contact dinamic. Contactul static este cel în care corpurile nu
au mişcări relative. Există numeroase situaţii practice în care astfel
de contact există; de exemplu, stâlpii clădirilor, fundaţii în contact cu
solul, suporţi ai diferitelor componente de maşini şi instalaţii etc.
Aceasta se mai numeşte şi problema de penetrare (indentare), în care
un poanson (penetrator sau indentor) apasă pe un semi-spaţiu elastic.
Poansonul transmite o forţă P către suport şi are contact cu acesta pe
o suprafaţă de contact A. Problema de calcul care se pune în astfel de
situaţii este:
- determinarea tensiunilor maxime în zona contactului;
- determinarea deplasărilor celor două corpuri.
Problema are mai multe variante, cum ar fi situaţia în care
ambele sau numai un singur corp este deformabil, sau când frecarea
dintre cele două corpuri se ia sau nu în considerare. Cele mai simple
cazuri de astfel de contacte sunt discutate în secţiunea următoare.
Contactul dinamic apare în cazul în care cele două corpuri se
mişcă relativ şi poate fi împărţit în contact cu alunecare şi contact cu
rostogolire. Contactul cu alunecare apare, de exemplu, în frâne,
ambreiaje şi lagăre, sau în regimul de pornire-oprire al maşinilor
rotative cu suspensie hidro- sau aero-dinamică. Acest tip de contact
este cel mai dezavantajos din punctul de vedere al uzurii. Problema
de calcul care se pune în cazul contactului cu alunecare este similară
cu cea definită mai sus pentru contactul static. Diferenţa constă în
distribuţia tensiunilor care apar în vecinătatea zonei de contact. Acest
aspect este discutat în secţiunea 9.3.
Contactul cu rostogolire este şi el frecvent întâlnit în practică, de
exemplu, la rulmenţi, lagăre de tip cuţit etc. Este un tip de încărcare
care duce la uzură mai mică decât contactul cu alunecare şi de aceea
este folosit în cazurile în care forţele transmise sunt mari, dar vitezele
relative ale suprafeţelor în mişcare sunt moderate. În cazurile în care
vitezele relative sunt mari, se urmăreşte evitarea contactului prin
folosirea suspensiei hidro- sau aero-dinamice. Se menţionează că în
224
majoritatea cazurilor de contact cu alunecare se foloseşte lubrifierea,
ceea ce este, în parte, tot un tip de suspensie hidro-dinamică (agentul
lubrifiant formează o “pană” hidro-dinamică separând efectiv cele
două suprafeţe).
Din punctul de vedere al calculului de corp solid (calcul de
rezistenţă), nu există o deosebire esenţială între contactul static şi cel
dinamic. Desigur, condiţiile pe frontieră sunt diferite, dar formularea
şi, în linii mari, rezultatele sunt similare. Aşa cum s-a sugerat mai sus
însă, problema contactului este mult mai complexă decât problema
de mecanică. Cum obiectivul principal este acela de a prezice şi
controla frecarea şi mai ales uzura, alte aspecte ale problemei,
dincolo de distribuţia tensiunilor din cele două corpuri, trebuie luate
în considerare. Acestea sunt aspectul termic şi mai ales cel chimic. O
cantitate semnificativă de energie este disipată în timpul contactului
dinamic, energie egală cu lucrul mecanic efectuat de forţa de frecare.
Această energie se transformă în căldură, care, dacă nu este disipată
eficient de cele două corpuri, duce la supraîncălzirea suprafeţei de
contact şi chiar la topirea ei (vezi supraîncălzirea frânelor la
automobile). Aspectul termic al problemei poate fi controlat la
proiectare prin diverse metode inginereşti. În multe cazuri, datorită
tensiunilor mari şi a temperaturii ridicate, suprafaţa de contact devine
un adevărat “reactor chimic.” Reacţia preponderentă este cea de
oxidare. Cum mulţi dintre oxizi sunt fie fragili, fie nu aderă bine la
materialul de bază, aceasta duce la formarea unui film care este uşor
de îndepărtat la următoarea trecere, sau care constituie un loc de
amorsare a fisurilor de suprafaţă, care se pot propaga apoi în substrat.
Multe alte reacţii chimice pot avea loc, în unele cazuri “produşii”
fiind cu totul neaşteptaţi. În tribologia modernă (ştiinţa care se ocupă
de studiul frecării şi uzurii), aceste reacţii chimice se folosesc în
avantajul proiectantului, adică, se caută ca produşii de reacţie să ducă
la reducerea coeficientului de frecare, cu toate implicaţiile aferente
asupra procesului termic şi mecanic.
Această sumară trecere în revistă a căutat să scoată în evidenţă
complexitatea ansamblului fenomenelor de contact, frecare şi uzură.
Scopul acestui capitol este limitat la prezentarea rezultatelor de bază
privind problema mecanică şi anume, tensiunile şi deplasările din
zona de contact şi tensiunile din interiorul corpurilor în contact. O
225
tratare mai avansată, dar în aceeaşi concepţie, se poate găsi în
tratatele de mecanică a contactului [1,2]. Cercetări privind legătura
dintre uzură şi studiul mecanicii contactului sunt prezentate în
tratatele de tribologie [3,4]. Această legătură este, însă, încă vagă.
Pentru elucidarea ei tribologia “tradiţională” va trebui să facă apel la
concepte de analiză statistică şi de fizica suprafeţelor. Primii paşi în
această direcţie au fost deja făcuţi [5,6].
9.2. Contactul mecanic fără frecare
În cele ce urmează se vor prezenta câteva dintre soluţiile de bază
ale problemei contactului corpurilor solide deformabile. Se va
considera, pentru început, cazul în care se presupune că nu există
frecare între cele două corpuri, cele două suprafeţe aflate în contact
putând aluneca liber în direcţie tangenţială. Aceasta este, desigur, o
aproximare destul de serioasă dacă modulul de elasticitate al
materialului celor două corpuri este diferit.
Formularea unei astfel de probleme se poate face precizând
presiunile pe suprafaţa de contact, deplasările în zona de contact, sau
forţa totală transmisă. Cazurile curent întâlnite în practică sunt cele în
care se precizează deplasările, cum ar fi în situaţia în care un poanson
rigid apasă pe un semi-spaţiu, şi cele în care tot ceea ce se cunoaşte
este forţa totală transmisă. Condiţiile pe frontieră, în afara zonei de
contact, sunt cele de suprafaţă liberă (tensiuni normale şi tangenţiale
zero), iar în cazul în care unul din corpuri este semi-infinit, se mai
impune şi condiţia ca tensiunile să scadă la zero la infinit.
9.2.1. Probleme în tensiuni pe frontieră
Problema în care se impun tensiuni pe zona de contact este
oarecum artificială, dar soluţia ei ajută la rezolvarea altor probleme,
mai apropiate de realitate.
Semi-spaţiu încărcat cu o forţă concentrată.
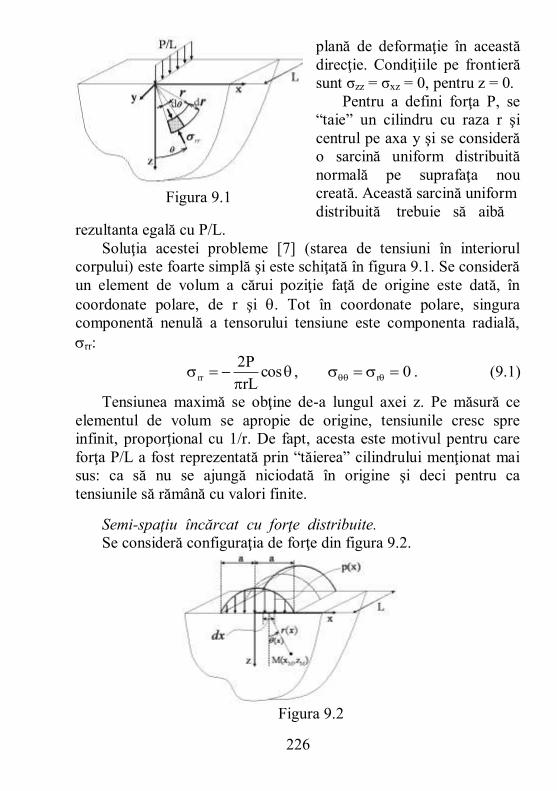
Această problemă a fost studiată de Boussinesq. Se consideră
varianta ei pentru stare plană de deformaţii, ca în figura 9.1. O forţă
uniform distribuită de-a lungul axei y, cu mărimea P/L pe unitatea de
lungime, acţionează asupra semi-spaţiului elastic z > 0. Deoarece
spaţiul se întinde la infinit în direcţia axei y, corpul este în stare
226
plană de deformaţie în această
direcţie. Condiţiile pe frontieră
sunt σzz = σxz = 0, pentru z = 0.
Pentru a defini forţa P, se
“taie” un cilindru cu raza r şi
centrul pe axa y şi se consideră
o sarcină uniform distribuită
normală pe suprafaţa nou
creată. Această sarcină uniform
distribuită trebuie să aibă
rezultanta egală cu P/L.
Soluţia acestei probleme [7] (starea de tensiuni în interiorul
corpului) este foarte simplă şi este schiţată în figura 9.1. Se consideră
un element de volum a cărui poziţie faţă de origine este dată, în
coordonate polare, de r şi . Tot în coordonate polare, singura
componentă nenulă a tensorului tensiune este componenta radială,
rr:
cosrL
P2rr , 0r . (9.1)
Tensiunea maximă se obţine de-a lungul axei z. Pe măsură ce
elementul de volum se apropie de origine, tensiunile cresc spre
infinit, proporţional cu 1/r. De fapt, acesta este motivul pentru care
forţa P/L a fost reprezentată prin “tăierea” cilindrului menţionat mai
sus: ca să nu se ajungă niciodată în origine şi deci pentru ca
tensiunile să rămână cu valori finite.
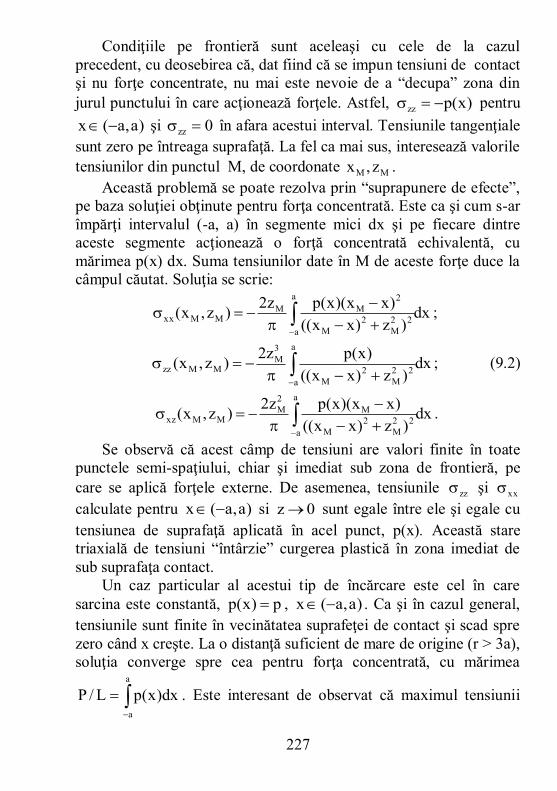
Semi-spaţiu încărcat cu forţe distribuite.
Se consideră configuraţia de forţe din figura 9.2.
Figura 9.2
Figura 9.1
227
Condiţiile pe frontieră sunt aceleaşi cu cele de la cazul
precedent, cu deosebirea că, dat fiind că se impun tensiuni de contact
şi nu forţe concentrate, nu mai este nevoie de a “decupa” zona din
jurul punctului în care acţionează forţele. Astfel, )x(pzz pentru
)a,a(x şi 0zz în afara acestui interval. Tensiunile tangenţiale
sunt zero pe întreaga suprafaţă. La fel ca mai sus, interesează valorile
tensiunilor din punctul M, de coordonate MM z,x .
Această problemă se poate rezolva prin “suprapunere de efecte”,
pe baza soluţiei obţinute pentru forţa concentrată. Este ca şi cum s-ar
împărţi intervalul (-a, a) în segmente mici dx şi pe fiecare dintre
aceste segmente acţionează o forţă concentrată echivalentă, cu
mărimea p(x) dx. Suma tensiunilor date în M de aceste forţe duce la
câmpul căutat. Soluţia se scrie:
dx)z)xx((
)xx)(x(pz2)z,x(
a
a
22
M
2
M
2
MMMMxx
;
dx)z)xx((
)x(pz2)z,x(
a
a
22
M
2
M
3
MMMzz
; (9.2)
dx)z)xx((
)xx)(x(pz2)z,x(
a
a
22
M
2
M
M
2
MMMxz
.
Se observă că acest câmp de tensiuni are valori finite în toate
punctele semi-spaţiului, chiar şi imediat sub zona de frontieră, pe
care se aplică forţele externe. De asemenea, tensiunile zz şi xx
calculate pentru )a,a(x si 0z sunt egale între ele şi egale cu
tensiunea de suprafaţă aplicată în acel punct, p(x). Această stare
triaxială de tensiuni “întârzie” curgerea plastică în zona imediat de
sub suprafaţa contact.
Un caz particular al acestui tip de încărcare este cel în care
sarcina este constantă, p)x(p , )a,a(x . Ca şi în cazul general,
tensiunile sunt finite în vecinătatea suprafeţei de contact şi scad spre
zero când x creşte. La o distanţă suficient de mare de origine (r > 3a),
soluţia converge spre cea pentru forţa concentrată, cu mărimea
a
a
dx)x(pL/P . Este interesant de observat că maximul tensiunii
228
principale este în punctul 2/az de pe axa de simetrie. Tot aici se
obţine şi maximul tensiunii de forfecare. Probabilitatea cea mai mare
de iniţiere a ruperii este deci undeva în interiorul materialului, la o
adâncime proporţională cu dimensiunea suprafeţei de contact, a.
Fisurile care se întâmplă să fie într-o astfel de poziţie faţă de
suprafaţă au şansele cele mai mari să crească şi apoi să ajungă la
suprafaţă, producând “separarea” unei aşchii de uzură.
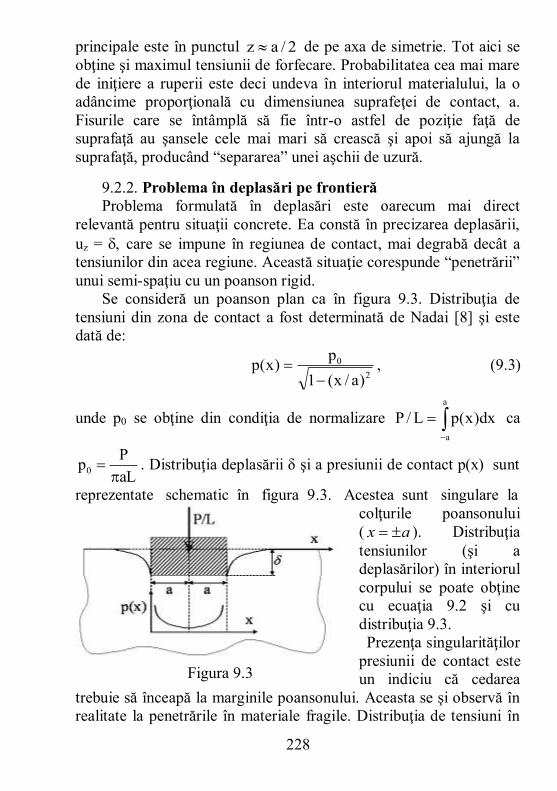
9.2.2. Problema în deplasări pe frontieră
Problema formulată în deplasări este oarecum mai direct
relevantă pentru situaţii concrete. Ea constă în precizarea deplasării,
uz = care se impune în regiunea de contact, mai degrabă decât a
tensiunilor din acea regiune. Această situaţie corespunde “penetrării”
unui semi-spaţiu cu un poanson rigid.
Se consideră un poanson plan ca în figura 9.3. Distribuţia de
tensiuni din zona de contact a fost determinată de Nadai [8] şi este
dată de:
2
0
)a/x(1
p)x(p
, (9.3)
unde p0 se obţine din condiţia de normalizare
a
a
dx)x(pL/P ca
aL
Pp0
. Distribuţia deplasării δ şi a presiunii de contact p(x) sunt
reprezentate schematic în figura 9.3. Acestea sunt singulare la
colţurile poansonului
( ax ). Distribuţia
tensiunilor (şi a
deplasărilor) în interiorul
corpului se poate obţine
cu ecuaţia 9.2 şi cu
distribuţia 9.3.
Prezenţa singularităţilor
presiunii de contact este
un indiciu că cedarea
trebuie să înceapă la marginile poansonului. Aceasta se şi observă în
realitate la penetrările în materiale fragile. Distribuţia de tensiuni în
Figura 9.3
229
cazul penetrărilor în materiale ductile este, desigur, aceeaşi. Natura
materialului fiind însă diferită, curgerea plastică în zonele critice
previne ruperea fragilă.
Această soluţie rămâne neschimbată pentru poansoane cu
secţiune circulară. Singura diferenţă este că 20a2
Pp
, unde a este
acum raza poansonului.
9.2.3. Soluţia lui Hertz
Hertz a studiat problema contactului a doua corpuri de revoluţie
(sfere, elipsoizi sau cilindri), într-un context mai realist decât cele
discutate în § 9.2.1 [9]. Mai precis, condiţiile pe frontieră nu se referă
la deplasările sau tensiunile din zona de contact, ci la forţa totală
transmisă între cele două corpuri. Suprafeţele din afara contactului
rămân, ca mai sus, suprafeţe libere de tensiuni. Mai mult, ambele
corpuri sunt considerate deformabile şi pot fi din materiale diferite,
adică pot avea module de elasticitate diferite.
În aceste condiţii, soluţia trebuie să determine dimensiunile şi
forma suprafeţei de contact, distribuţia tensiunilor de contact,
distribuţia tensiunilor în interiorul corpurilor şi deplasarea totală a
punctului în care se aplică forţa exterioară. În cele ce urmează se
prezintă principalele rezultate corespunzând contactului a doua sfere
şi a doi cilindri, cu axele aliniate. În ambele cazuri, contactul este
considerat fără frecare. Soluţii pentru alte configuraţii geometrice se
pot găsi în [1, 2].
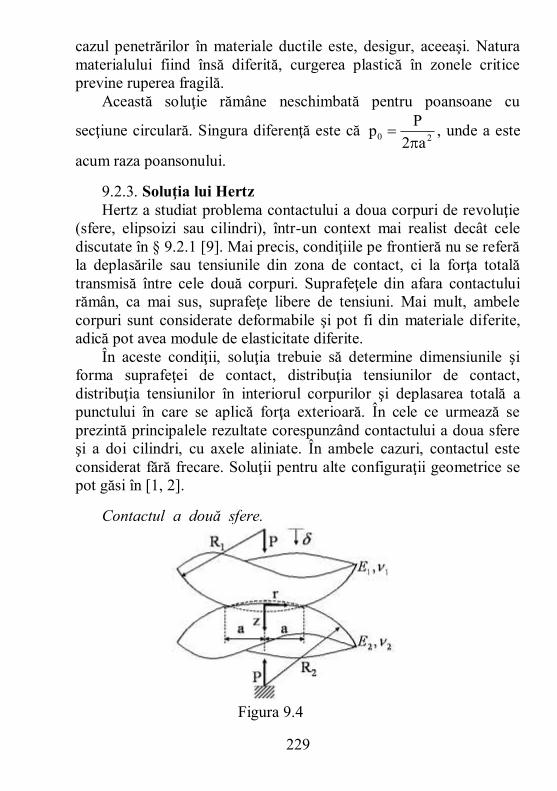
Contactul a două sfere.
Figura 9.4
230
Se consideră geometria din figura 9.4, în care două sfere cu raze
R1 şi R2 sunt în contact şi sunt încărcate (împinse unul spre altul) cu
forţa P. Corpurile sunt din materiale linear elastice, omogene şi
izotrope, cu constantele elastice E1, 1, respectiv E2, 2.
Soluţia acestei probleme se exprimă în funcţie de o rază
echivalentă, R şi un modul de elasticitate echivalent, E*, date de
formulele
21 R
1
R
1
R
1 ,
2
2
2
1
2
1
E
1
E
1
*E
1
. (9.4)
Faptul că în locul a patru constante elastice soluţia depinde
numai de două este un rezultat mai general din teoria elasticităţii,
stabilit de Dundurs [10]. Observaţia este valabilă pentru problemele
bi-dimensionale, în care apar două materiale izotrope diferite.
Se demonstrează că suprafaţa de contact, în acest caz, este
circulară (datorită simetriei axiale a problemei) cu raza 3/1
*E4
PR3a
. (9.5)
Distribuţia tensiunilor pe suprafaţa de contact este parabolică, de
forma
2
0 )a/r(1p)r(p , ar . (9.6)
Cum contactul este fără frecare, numai tensiunile normale la
suprafaţă (presiunea de contact) sunt specificate. Constanta p0
depinde de forţa totală, P, aplicată celor două corpuri şi rezultă din
condiţia de normalizare a distribuţiei p(r) şi anume
a
0
20a
P
2
3prdr2)r(pP . (9.7)
Se observă că p0 este presiunea medie pe suprafaţa de contact
multiplicată cu factorul 3/2.
Deplasarea relativă (apropierea) a centrelor celor două sfere, ,
este
3/1
2
2
*RE16
P9
, (9.8)
231
care indică o relaţie nelineară între forţa aplicată şi deplasarea
relativă a punctelor în care se aplică forţele (acţiune - reacţiune).
Caracterul nelinear al dependenţei provine din geometria contactului,
în ciuda faptului că răspunsul ambelor materiale este linear.
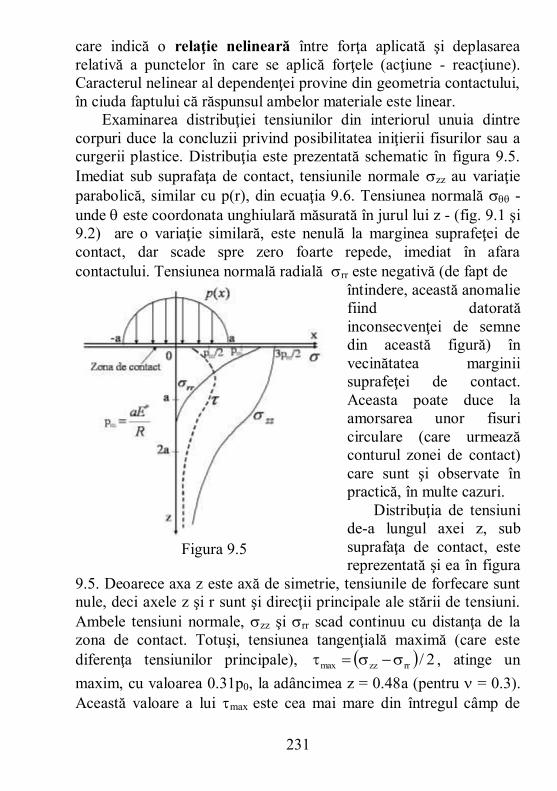
Examinarea distribuţiei tensiunilor din interiorul unuia dintre
corpuri duce la concluzii privind posibilitatea iniţierii fisurilor sau a
curgerii plastice. Distribuţia este prezentată schematic în figura 9.5.
Imediat sub suprafaţa de contact, tensiunile normale zz au variaţie
parabolică, similar cu p(r), din ecuaţia 9.6. Tensiunea normală -
unde este coordonata unghiulară măsurată în jurul lui z - (fig. 9.1 şi
9.2) are o variaţie similară, este nenulă la marginea suprafeţei de
contact, dar scade spre zero foarte repede, imediat în afara
contactului. Tensiunea normală radială rr este negativă (de fapt de
întindere, această anomalie
fiind datorată
inconsecvenţei de semne
din această figură) în
vecinătatea marginii
suprafeţei de contact.
Aceasta poate duce la
amorsarea unor fisuri
circulare (care urmează
conturul zonei de contact)
care sunt şi observate în
practică, în multe cazuri.
Distribuţia de tensiuni
de-a lungul axei z, sub
suprafaţa de contact, este
reprezentată şi ea în figura
9.5. Deoarece axa z este axă de simetrie, tensiunile de forfecare sunt
nule, deci axele z şi r sunt şi direcţii principale ale stării de tensiuni.
Ambele tensiuni normale, zz şi rr scad continuu cu distanţa de la
zona de contact. Totuşi, tensiunea tangenţială maximă (care este
diferenţa tensiunilor principale), 2/rrzzmax , atinge un
maxim, cu valoarea 0.31p0, la adâncimea z = 0.48a (pentru = 0.3).
Această valoare a lui max este cea mai mare din întregul câmp de
Figura 9.5
232
tensiuni, mai mare chiar decât cea de la marginea suprafeţei de
contact (z = 0, r = a). Aceasta indică faptul că la o forţă P suficient
de mare, curgerea plastică este de aşteptat să înceapă în acest punct
de sub suprafaţă.
Discuţia este oarecum paralelă cu cea de la § 9.2.1, unde se
făceau referiri la starea de tensiuni de sub o distribuţie constantă a
presiunii de contact (faţă de distribuţia parabolică din soluţia Hertz,
ecuaţia 9.6). În fapt, tensiunile de sub suprafaţa de contact din figura
9.5 sunt aproape identice cu cele obţinute în cazul unei presiuni de
contact constante.
Contactul a doi cilindri.
Cum în paragrafele precedente s-au făcut referiri la contactul
cilindrilor este necesar, pentru completitudine, să se particularizeze
soluţia Hertz şi pentru acest caz. Se consideră doi cilindri cu raze
diferite, din materiale linear elastice diferite, care sunt în contact de-a
lungul unei generatoare. Geometria este similară cu cea din figura
9.4, cu excepţia faptului că acum forţa este distribuită de-a lungul
întregii lungimi a cilindrilor (şi deci forţa este definită pe unitatea de
lungime, P/L). În acest caz problema este de stare plană de
deformaţii, spre deosebire de cea din cazul contactului sferelor, care
este o stare axial-simetrică de tensiuni.
Pentru această situaţie se obţin următoarele rezultate:
- lăţimea suprafeţei de contact
2/1
*LE
PR4a
; (9.9)
- distribuţia tensiunilor pe suprafaţa de contact (parabolică) 2
0 )a/x(1p)x(p , )a,a(x ; (9.10)
- constanta de normalizare
a
a
0aL
P2pdx)x(pL/P . (9.11)
Distribuţia tensiunilor pe suprafaţa de contact - şi sub aceasta -
este aproape identică cu cea pentru contactul între doua sfere (figura
9.5). De asemenea şi concluziile care se pot formula.
233
9.3. Contactul cu frecare
Două corpuri oarecare în contact interacţionează cu frecare.
Totuşi, în unele cazuri frecarea poate fi neglijată, de exemplu, cele în
care deplasările relative ale suprafeţelor în contact sunt mici sau nule.
Un exemplu este cel a doi cilindri sau două sfere de raze egale şi care
sunt realizate din acelaşi material. Acestea se deformează identic,
neexistând nici o tendinţă de deplasare relativă a celor două corpuri
în zona suprafeţei de contact.
Pe de altă parte, frecarea este importantă atâta timp cât există
mişcare relativă. Altfel, există o continuitate a deplasărilor între cele
două corpuri în zona de contact. Soluţia lui Hertz, de exemplu, a fost
obţinută în condiţiile în care nu există frecare şi deci cele două
suprafeţe în contact se pot deplasa relativ în direcţie tangenţială în
mod liber.
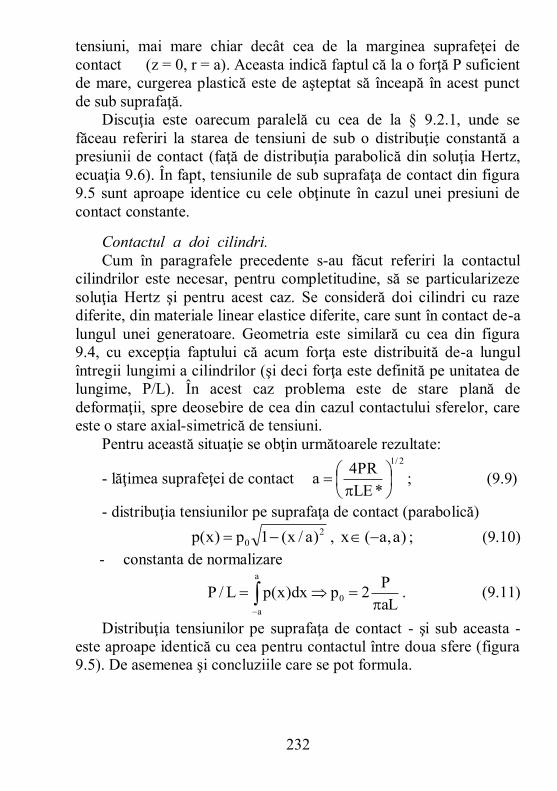
Este interesant de văzut, cel puţin calitativ, ce se întâmplă în
cazul în care se are în vedere frecarea. Pentru aceasta se consideră,
din nou, exemplul a doi cilindri de raze diferite, din materiale
diferite, care sunt în contact de-a lungul generatoarei (cazul stării
plane de deformaţie). Se încarcă acest ansamblu cu o forţa normală,
cu valoarea pe unitatea de lungime, P/L, pentru a stabili contactul.
Această forţă duce la o distribuţie parabolică de tensiuni normale la
suprafaţa de contact, p(x), descrise de ecuaţia 9.10. Distribuţia este
reprezentată în figura 9.6.
Se aplică apoi o forţă
tangenţială, cu valoarea, pe
unitatea de lungime, F/L. Această
forţă tinde să mişte cele două
corpuri în direcţia axei x. Se
presupune, pentru moment, că ea
nu duce la rostogolire. Care este
distribuţia tensiunilor tangenţiale
în zona de contact, tensiuni
introduse de forţa F/L ?. Pentru a
da un răspuns simplu la această
întrebare, se presupune că nu există alunecare în zona de contact.
Atunci, deplasarea relativă a celor două corpuri este nulă şi se poate
Figura 9.6
234
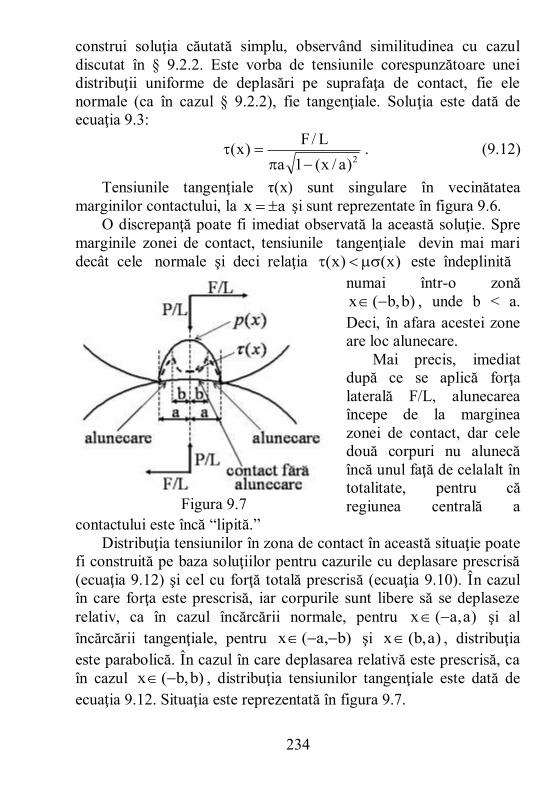
construi soluţia căutată simplu, observând similitudinea cu cazul
discutat în § 9.2.2. Este vorba de tensiunile corespunzătoare unei
distribuţii uniforme de deplasări pe suprafaţa de contact, fie ele
normale (ca în cazul § 9.2.2), fie tangenţiale. Soluţia este dată de
ecuaţia 9.3:
2)a/x(1a
L/F)x(
. (9.12)
Tensiunile tangenţiale τ(x) sunt singulare în vecinătatea
marginilor contactului, la ax şi sunt reprezentate în figura 9.6.
O discrepanţă poate fi imediat observată la această soluţie. Spre
marginile zonei de contact, tensiunile tangenţiale devin mai mari
decât cele normale şi deci relaţia )x()x( este îndeplinită
numai într-o zonă
)b,b(x , unde b < a.
Deci, în afara acestei zone
are loc alunecare.
Mai precis, imediat
după ce se aplică forţa
laterală F/L, alunecarea
începe de la marginea
zonei de contact, dar cele
două corpuri nu alunecă
încă unul faţă de celalalt în
totalitate, pentru că
regiunea centrală a
contactului este încă “lipită.”
Distribuţia tensiunilor în zona de contact în această situaţie poate
fi construită pe baza soluţiilor pentru cazurile cu deplasare prescrisă
(ecuaţia 9.12) şi cel cu forţă totală prescrisă (ecuaţia 9.10). În cazul
în care forţa este prescrisă, iar corpurile sunt libere să se deplaseze
relativ, ca în cazul încărcării normale, pentru )a,a(x şi al
încărcării tangenţiale, pentru )b,a(x şi )a,b(x , distribuţia
este parabolică. În cazul în care deplasarea relativă este prescrisă, ca
în cazul )b,b(x , distribuţia tensiunilor tangenţiale este dată de
ecuaţia 9.12. Situaţia este reprezentată în figura 9.7.
Figura 9.7
235
Dimensiunea, b, a zonei de contact fără alunecare se poate
determina din condiţia de normalizare a tensiunilor tangenţiale (x).
Suma lor trebuie să fie egală cu F/L, condiţie din care rezultă
P
F1ab
. (9.13)
Când forţa F creşte suficient pentru a reduce b la zero (F = P),
cele două corpuri alunecă relativ. Pentru F oricât de mic sub această
valoare critică, b > 0.
9.4. Contactul mecanic cu adeziune
Contactul adeziv are loc atunci când suprafeţele în contact au
rugozitate mică şi sunt curate. El se formează local şi în cazul
suprafeţelor rugoase, la contactul dintre asperităţi, aşa cum s-a
menţionat la § 9.1. Acest tip de contact este important, mai ales,
pentru că este atât de puternic încât ruperea lui implică smulgerea de
material din suprafaţa unuia dintre corpuri. Pentru a facilita
înţelegerea naturii acestui tip de contact, câteva noţiuni de fizica
suprafeţelor sunt utile.
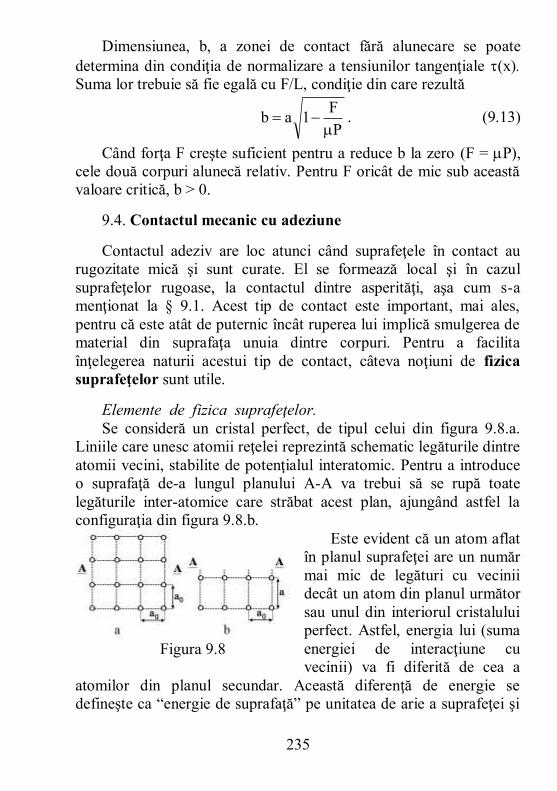
Elemente de fizica suprafeţelor.
Se consideră un cristal perfect, de tipul celui din figura 9.8.a.
Liniile care unesc atomii reţelei reprezintă schematic legăturile dintre
atomii vecini, stabilite de potenţialul interatomic. Pentru a introduce
o suprafaţă de-a lungul planului A-A va trebui să se rupă toate
legăturile inter-atomice care străbat acest plan, ajungând astfel la
configuraţia din figura 9.8.b.
Este evident că un atom aflat
în planul suprafeţei are un număr
mai mic de legături cu vecinii
decât un atom din planul următor
sau unul din interiorul cristalului
perfect. Astfel, energia lui (suma
energiei de interacţiune cu
vecinii) va fi diferită de cea a
atomilor din planul secundar. Această diferenţă de energie se
defineşte ca “energie de suprafaţă” pe unitatea de arie a suprafeţei şi
Figura 9.8
236
se notează, de obicei, cu . Această mărime se măsoară în J/m2 şi are
valori tipice în jurul a 1 J/m2. În solide, ea este de cele mai multe ori
neglijată, în timp ce în lichide ea joacă un rol important.
Pe baza acestei mărimi se poate defini “tensiunea superficială”
ca fiind variaţia energiei suprafeţei cu aria. Cum energia totală a unei
regiuni de suprafaţă A este E = A, tensiunea superficială se poate
defini ca
A
AA
E
. (9.14)
Primul termen arată variaţia energiei prin simplul fapt că se
“adaugă” suprafaţa, în timp ce al doilea reprezintă variaţia energiei
asociată cu “întinderea” suprafeţei existente. Pentru a înţelege
diferenţa dintre cei doi termeni, se notează, ca în cazul lichidelor,
. Aceasta pentru că mărirea suprafeţei unui lichid implică
aducerea de noi atomi la suprafaţă, în timp ce legăturile dintre ei nu
sunt deformate, atomii în starea lichidă având suficientă mobilitate
pentru a se acomoda deformaţiilor impuse, rearanjându-se. Într-un
solid, atunci când suprafaţa (împreună cu întregul corp) este întinsă,
nu se aduc noi atomi pentru a participa la mărirea ariei suprafeţei, ci
legăturile inter-atomice dintre atomii de la suprafaţă sunt
distorsionate.
Un efect secundar, care apare atunci când se creează o suprafaţă,
este “relaxarea” distanţei inter-atomice dintre primul şi al doilea strat
atomic. Dimensiunea a din figura 9.8.b este diferită de a0 din figura
9.8.a. În ceea ce priveşte discuţia de faţă, acest efect este însă
secundar.
Adeziunea se poate explica pe baza figurii 9.8.b. Atunci când
două suprafeţe de tipul celor din această figură sunt aduse în
apropiere ele vor căuta să re-formeze legăturile interatomice libere.
Va apare astfel o atracţie care este “resimţită” la distanţe mult mai
mari decât a0. Odată aduse în contact, este practic imposibil de a mai
separa cele două corpuri, exact de-a lungul aceluiaşi plan A-A.
Pentru ca adeziunea să se facă simţită, suprafeţele trebuie să fie
suficient de curate. Suprafeţele expuse la mediu, chiar şi cele puţin
rugoase, sunt acoperite cu oxizi şi / sau compuşi moleculari, în
principal hidrocarbonaţi, din mediu.

237
În tehnologia modernă, în MEMS (micro-electro-mechanical
systems) sau în NEMS (nano-electro-mechanical systems) şi structuri
la scara nano, adeziunea este o problemă serioasă. Un element mobil
al unui MEMS, cum ar fi o membrană sau o bară suspendată, având
rol de rezonator sau de senzor balistic, odată ce intră în contact cu
unul din pereţii structurii, este imposibil de dezlipit şi întreg sistemul
este compromis.
Microscopul cu forţă atomică (AFM – atomic force microscope)
funcţionează pe baza acestei forţe de interacţiune, care duce la
aderarea suprafeţelor. Acest aparat, care funcţionează, în principiu,
ca un profilometru, are un vârf foarte ascuţit care este ţinut la o
distanţă dată de suprafaţă, prin sesizarea proximităţii ei. Dacă vârful
este prea aproape de suprafaţă, forţele de adeziune îl trag spre
aceasta, iar dacă este prea departe, elementul elastic care îl susţine se
relaxează. Astfel, se poate folosi o buclă de control care ţine vârful la
o distanţă de câţiva nanometri de suprafaţă, în timp ce aceasta se
deplasează lateral. Rezultatul este o imagine a suprafeţei.
Soluţia JKR.
Contactul a două corpuri elastice ale căror suprafeţe
interacţionează şi prin forţe de adeziune a fost studiat de Johnson,
Kendall şi Roberts [11]. Soluţia lor (soluţia JKR) este o extensie a
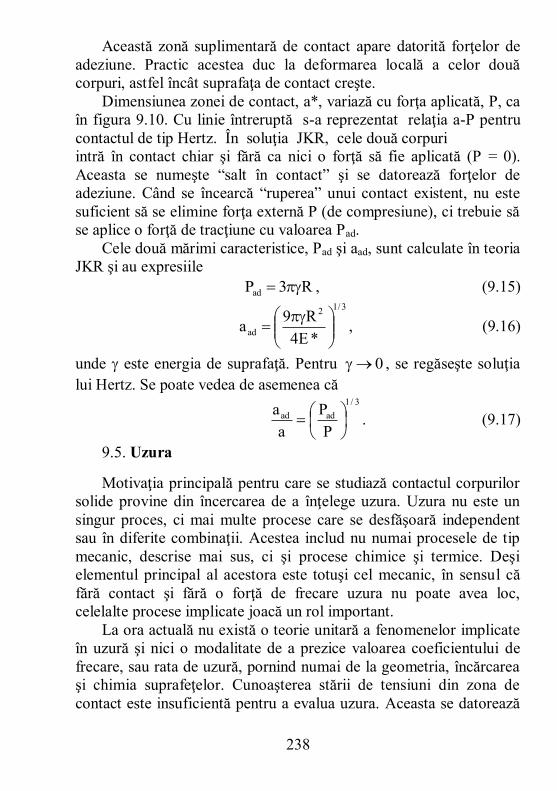
soluţiei Hertz, în care zona de contact arată ca în figura 9.9. Aici
corpurile vin în contact pe zona )a,a(x , aşa cum este prescris
prin soluţia Hertz, dar şi într-un inel de lăţime aad imediat în afara
zonei de contact Hertz.
Figura 9.9 Figura 9.10
238
Această zonă suplimentară de contact apare datorită forţelor de
adeziune. Practic acestea duc la deformarea locală a celor două
corpuri, astfel încât suprafaţa de contact creşte.
Dimensiunea zonei de contact, a*, variază cu forţa aplicată, P, ca
în figura 9.10. Cu linie întreruptă s-a reprezentat relaţia a-P pentru
contactul de tip Hertz. În soluţia JKR, cele două corpuri
intră în contact chiar şi fără ca nici o forţă să fie aplicată (P = 0).
Aceasta se numeşte “salt în contact” şi se datorează forţelor de
adeziune. Când se încearcă “ruperea” unui contact existent, nu este
suficient să se elimine forţa externă P (de compresiune), ci trebuie să
se aplice o forţă de tracţiune cu valoarea Pad.
Cele două mărimi caracteristice, Pad şi aad, sunt calculate în teoria
JKR şi au expresiile
R3Pad , (9.15) 3/1
2
ad*E4
R9a
, (9.16)
unde este energia de suprafaţă. Pentru 0 , se regăseşte soluţia
lui Hertz. Se poate vedea de asemenea că 3/1
adad
P
P
a
a
. (9.17)
9.5. Uzura
Motivaţia principală pentru care se studiază contactul corpurilor
solide provine din încercarea de a înţelege uzura. Uzura nu este un
singur proces, ci mai multe procese care se desfăşoară independent
sau în diferite combinaţii. Acestea includ nu numai procesele de tip
mecanic, descrise mai sus, ci şi procese chimice şi termice. Deşi
elementul principal al acestora este totuşi cel mecanic, în sensul că
fără contact şi fără o forţă de frecare uzura nu poate avea loc,
celelalte procese implicate joacă un rol important.
La ora actuală nu există o teorie unitară a fenomenelor implicate
în uzură şi nici o modalitate de a prezice valoarea coeficientului de
frecare, sau rata de uzură, pornind numai de la geometria, încărcarea
şi chimia suprafeţelor. Cunoaşterea stării de tensiuni din zona de
contact este insuficientă pentru a evalua uzura. Aceasta se datorează
239
în principal faptului că teoria corpului solid nu include criterii de
cedare a materialului (rupere, localizare a deformaţiei plastice, etc).
Din acest motiv singurele relaţii folosite pentru a prezice rata de
uzură, w (volumul de material îndepărtat pe unitatea de distanţă de-a
lungul direcţiei de mişcare relativă a celor două corpuri), sunt pur
empirice. O relaţie frecvent folosită, în cazul în care vitezele relative
sunt mici, este ecuaţia Archard:
H
PKw , (9.18)
unde P este forţa transmisă prin zona de contact, iar H este duritatea
suprafeţei (hardness). Constanta K se numeşte coeficientul de uzură
adimensional. Se poate defini şi un coeficient de uzură dimensional,
k, astfel încât
w = kP, (9.19)
unde k = K/H şi se măsoară în mm3/Nm. Exemple de valori ale lui k
sunt: 7x10-3
pentru oţel carbon pe oţel carbon, 10-4
pentru oţel de
scule pe oţel de scule, 1.7x10-5
pentru oţel inoxidabil pe oţel
inoxidabil.
Există mai multe mecanisme de uzură care sunt discutate în
tratatele de specialitate [3]. Aici se va menţiona numai faptul că, în
funcţie de valoarea forţei P şi de viteza relativă a corpurilor în
contact, v, un mecanism sau altul este dominant. De exemplu, pentru
oţel pe oţel, la P şi v mici (v < 0.1 m/s), mecanismul dominant este
uzura adezivă. Acest tip de uzură a fost descris mai sus şi implică
formarea şi ruperea zonelor microscopice de adeziune formate între
vârfurile asperităţilor care vin în contact direct. La forţe mici şi viteze
mari (v > 1 m/s), suprafaţa se oxidează. Oxizii sunt în general fragili
şi se exfoliază uşor. La forţe şi viteze mari se degajează o cantitate
importantă de căldură, ceea ce poate duce la topirea locală a
materialului şi deci la uzură pronunţată. Atunci când forţa de contact
este suficient de mare încât materialul curge plastic în zona de sub
suprafaţa de contact, uzura este de asemenea foarte pronunţată.
Bibliografie
1. Johnson, K.L., Contact Mechanics, Cambridge Univ. Press,
1985.
240
2. Jaeger, J., New Solutions in Contact Mechanics, Southampton,
2005.
3. Williams, J.A., Engineering Tribolog, Oxford Univ. Press,
1994.
4. Ling, F.F., Fundamentals of Surface Mechanics with
Application, Springer, 2002.
5. Suh, N.P., Tribophysics, Prentice-Hall, 1986.
6. Bushan, B. (Ed.), Fundamentals of Tribology and Bridging the
Gap Between the Macro - and Micro - / Nanoscale, Kluwer, 2001.
7. Timoshenko, S.P., Goodier, J.N., Theory of elasticity,
McGraw, 1970.
8. Nadai, A.I., Theory of Flow and Fracture of Solids, Vol. 2, p.
221, McGraw Hill, 1963.
9. Hertz, H., Miscellaneous Papers by H. Hertz (English
translation). Ed. By Jones and Schott, London, McMillan, 1896.
10. Dundurs, J., Effect of elastic constants on stress in a
composite under plane deformation, J. Composite Matls., Vol. 1, p.
310, 1967.
11. Johnson, K.L., Kendall, K., Roberts A.D., Surface energy
and the contact of elastic solids, Proc. Royal Soc. London, Vol.
A324, p. 301, 1971.
12. Sorohan, Şt., Constantinescu, I.N., Practica modelării şi
analizei cu elemente finite, Politehnica Press, Bucureşti, 2003.